
距離係数近似式生成装置、距離係数近似式生成方法及び距離係数近似式生成プログラム

【課題】固定の距離係数を用いる場合に比して、精度の高い距離係数を算出することができる距離係数の近似式を生成することができる距離係数近似式生成装置を提供する。
【解決手段】距離係数近似式生成装置は、そして、距離係数近似式生成装置では、速度取得手段が、移動体の走行速度を取得し、パルス数取得手段が、速度取得時の車速パルスを取得し、距離係数値算出手段が上記走行速度と上記パルス数とを用いて距離係数値を算出する。そして、近似式生成用情報登録手段は、所定の速度域毎に、上記走行速度の平均値と上記距離係数値の平均値とを登録し、生成手段が上記走行速度の平均値と、上記距離係数値の平均値とを用いて最小二乗法等で距離係数近似式を生成する。これにより、距離係数近似式生成装置は、所定の方法で取得した速度と上記距離係数近似式とを用いて、速度に応じた距離係数値を取得することができる。
【解決手段】距離係数近似式生成装置は、そして、距離係数近似式生成装置では、速度取得手段が、移動体の走行速度を取得し、パルス数取得手段が、速度取得時の車速パルスを取得し、距離係数値算出手段が上記走行速度と上記パルス数とを用いて距離係数値を算出する。そして、近似式生成用情報登録手段は、所定の速度域毎に、上記走行速度の平均値と上記距離係数値の平均値とを登録し、生成手段が上記走行速度の平均値と、上記距離係数値の平均値とを用いて最小二乗法等で距離係数近似式を生成する。これにより、距離係数近似式生成装置は、所定の方法で取得した速度と上記距離係数近似式とを用いて、速度に応じた距離係数値を取得することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、距離係数の近似式を生成する技術に関する。
【背景技術】
【0002】
車両の相対走行距離は、車輪の回転数を検出する距離センサにて出力された車速パルスに基づく車速パルス数に、所定の距離係数値を乗ずることにより求められる。この距離係数値は、車速パルスの1パルス当たりの走行距離である。走行距離に比例してパルスが発生するため、車速とパルス数は比例し、距離係数値はほぼ一定値を取る。よって、図1(A)に示すようなハードワイヤから車速信号を取得しているデータの特性である、車両の速度と車速パルス数が比例していることが前提となる。
【0003】
ところで、近年、車内LAN(Local Area Network)化が進み、図1(B)に示すように、車内LANデータ取得用の変換処理を行うアダプタ等を介して、デジタル変換されたデータを基に処理が行われている。
【0004】
データを変換するアダプタによっては、デジタルデータ変換時や、デジタルデータをアナログ電圧へ変換する際などに誤差が生まれる。これにより、車両の速度と車速パルス数が比例しない状況が起こり、そういったアダプタを使用している車両に関しては、正確な距離との誤差が大きくなる可能性を含んでいるという問題点があった。
【0005】
また、車両の走行中、速度変化に応じてタイヤが遠心力により膨張することにより、タイヤの半径が変化してしまい、車速パルスの1パルス当たりの走行距離や車速パルスの出力タイミングが変わってしまうので、車両の相対走行距離に誤差が生じてしまうという問題があった。
【0006】
ところで、速度域毎に、距離係数値を複数持つことにより、車両の速度変化に対応した距離係数値を用いて相対走行距離を算出するナビゲーション装置がある(例えば、特許文献1参照)。
【0007】
【特許文献1】特開2005−257665号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
上述のナビゲーション装置は、所定の速度域毎に距離係数値を保持しているが、計測していない速度に関しては、必ずしも適切な距離係数値となるわけではなく、また、全ての速度域の距離係数値を算出しようとすると、距離係数の算出負荷がかかるという問題があった。
【0009】
本発明が解決しようとする課題としては、上記のものが例として挙げられる。本発明の目的は、固定の距離係数を用いる場合に比して、精度の高い距離係数を算出することができる距離係数の近似式を生成することができる距離係数近似式生成装置を提供することにある。
【課題を解決するための手段】
【0010】
請求項1に記載の発明は、移動体の走行速度を取得する速度取得手段と、前記移動体の走行時のパルス数を取得するパルス数取得手段と、前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出手段と、速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録手段と、速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成手段と、を備えることを特徴とする。
【0011】
請求項6に記載の発明は、距離係数近似式生成方法であって、移動体の走行速度を取得する速度取得工程と、前記移動体の走行時のパルス数を取得するパルス数取得工程と、前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出工程と、速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録工程と、速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成工程を備えることを特徴とする。
【0012】
請求項7に記載の発明は、コンピュータを備える装置によって実行される距離係数近似式生成プログラムであって、移動体の走行速度を取得する速度取得手段と、前記移動体の走行時のパルス数を取得するパルス数取得手段と、前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出手段と、速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録手段と、速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成手段、として前記コンピュータを機能させることを特徴とする。
【発明を実施するための最良の形態】
【0013】
本発明の好適な実施形態では、距離係数近似式生成装置は、移動体の走行速度を取得する速度取得手段と、前記移動体の走行時のパルス数を取得するパルス数取得手段と、前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出手段と、速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録手段と、速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成手段と、を備える。
【0014】
上記の距離係数近似式生成装置は、具体的には、ナビゲーション装置等に適用できる。そして、距離係数近似式生成装置では、速度取得手段が、移動体の走行速度を取得し、パルス数取得手段が、速度取得時の車速パルスを取得し、距離係数値算出手段が上記走行速度と、上記パルス数を用いて距離係数値を算出する。
【0015】
そして、登録手段は、所定の速度域(例えば、10km/h)毎に、上記走行速度の平均値と上記距離係数値の平均値とを登録し、生成手段が上記走行速度の平均値と、上記距離係数値の平均値とを用いて最小二乗法等で距離係数近似式を生成する。
【0016】
このように、距離係数近似式生成装置は、所定の速度と、当該速度に対応する距離係数値を算出し、速度域毎の、上記速度と距離係数値との平均値を算出し、距離係数値の近似式を算出することにより、速度と、距離係数値との相関関係を定義することができる。
【0017】
これによれば、距離係数近似式生成装置は、取得した速度を近似式に代入することで、速度に対応した距離係数値を取得することができ、固定の距離係数値を用いる場合に比して、より適切な距離係数値を取得することができる。従って、距離係数近似式生成装置が取得した距離係数値を用いれば、正確な走行距離を算出することができる。
【0018】
上記の距離係数近似式生成装置の一態様では、前記速度取得手段は、GPS速度、前記移動体の加速度を検知する加速度センサの出力に基づく速度又は前記移動体のホイールに設置されたホイールエンコーダの出力に基づく速度を走行速度として取得する。この場合、距離係数近似式生成装置は、GPS速度、加速度センサ又はホイールエンコーダを用いて距離係数値の近似式を算出することができる。従って、距離係数近似式生成装置は、所定の方法で取得した速度と当該近似式とを用いて、速度に応じた距離係数値を取得することができる。
【0019】
上記の距離係数近似式生成装置の他の一態様では、前記速度取得手段は、直近のGPS速度に所定の差分速度を加えた速度を走行速度として取得する。これによれば、距離係数近似式生成装置は、トンネル内を通過している場合等、GPS速度を計測できない状況においても、距離係数近似式生成装置を搭載している車両等の速度を算出することができ、当該速度に基づいて距離係数値の近似式を算出することができる。従って、距離係数近似式生成装置は、所定の方法で取得した速度と当該近似式とを用いて、速度に応じた距離係数値を取得することができる。
【0020】
上記の距離係数近似式生成装置の他の一態様では、前記差分速度は、前記移動体の加速度を検知する加速度センサの出力に基づく速度又は前記移動体のホイールに設置されたホイールエンコーダの出力に基づく速度から取得した差分速度である。この場合、距離係数近似式生成装置は、加速度センサやホイールエンコーダから取得した速度を用いて差分速度を算出することができる。
【0021】
本発明の他の観点では、上記の距離係数近似式生成装置を搭載する走行距離算出装置であって、前記走行取得手段が取得した走行速度及び前記距離係数近似式に基づいて、前記走行速度に対応する距離係数値を設定する設定手段と、前記パルス数取得手段が取得したパルス数及び前記走行速度に対応する距離係数値に基づいて前記移動体の走行距離を算出する走行距離算出手段と、を備える。この場合、走行距離算出装置は、上記距離係数近似式を用いて距離係数値を算出することにより、速度変化等によるタイヤの動径半径の変化に対応した適切な距離係数値を算出しているので、適切な走行距離を算出することができる。
【0022】
本発明の他の観点では、距離係数近似式生成方法であって、移動体の走行速度を取得する速度取得工程と、前記移動体の走行時のパルス数を取得するパルス数取得工程と、前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出工程と、速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録工程と、速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成工程を備える。
【0023】
このような距離係数近似式生成方法によっても、所定の速度と、当該速度に対応する距離係数値を算出し、速度域毎の、上記速度と距離係数値との平均値を算出し、距離係数値の近似式を算出することにより、速度と、距離係数値との相関関係を定義することができるので、取得した速度を近似式に代入することで、速度に対応した距離係数値を取得することができ、固定の距離係数値を用いる場合に比して、より適切な距離係数値を取得することができる。
【0024】
本発明の他の観点では、コンピュータを備える装置によって実行される距離係数近似式生成プログラムであって、移動体の走行速度を取得する速度取得手段と、前記移動体の走行時のパルス数を取得するパルス数取得手段と、前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出手段と、速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録手段と、速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成手段、として前記コンピュータを機能させる。このような距離係数近似式生成プログラムを、各種装置上で実行することにより、本発明の距離係数近似式生成装置を実現することができる。なお、上記距離係数近似式生成プログラムは記録媒体に記録した状態で好適に取り扱うことができる。
【実施例】
【0025】
以下、図面を参照して本発明の好適な実施例について説明する。
【0026】
[概要]
本実施例における走行距離算出装置は、後述するナビゲーション装置に適用する。走行距離算出装置は、予め速度域を定義しておく(例えば、10[km/h]刻み等)。そして、走行距離算出装置は、GPS速度を取得し、GPS速度検出時の車速パルス数を取得し、GPS速度検出時の走行距離と、上記車速パルス数とから距離係数値を算出する。
【0027】
そして、走行距離算出装置は、速度域毎で、GPS速度の平均値と、距離係数値の平均値とを算出し、GPS速度の平均値と、当該距離係数値の平均値とを保持しておく。
【0028】
そして、走行距離算出装置は、所定回数分、距離係数値を算出した後に、各速度域における距離係数値の平均値と、平均速度とを用いて最小二乗法で、距離係数近似式を生成する。
【0029】
このように、走行距離算出装置は、速度変化等により1パルス当たりの距離が変わった場合等、車両の速度と車速パルス数とが比例しない状況においても上記のような距離係数近似式を利用すれば、各速度に対応する距離係数を算出することができるので、車両の走行距離を適切に算出することができる。
【0030】
[ナビゲーション装置]
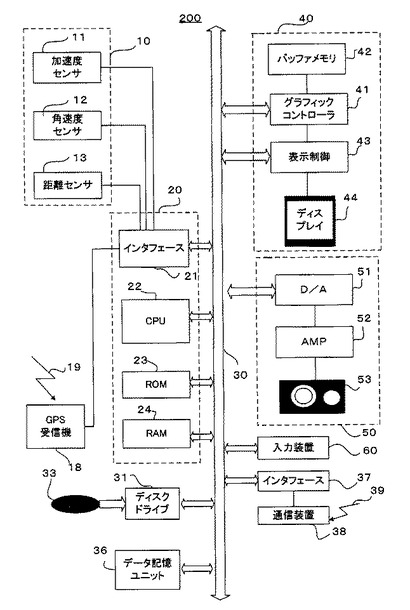
図2に、本発明の実施例に係るナビゲーション装置200の構成を示す。図2に示すように、ナビゲーション装置200は、自立測位装置10、GPS受信機18、システムコントローラ20、ディスクドライブ31、データ記憶ユニット36、通信用インタフェース37、通信装置38、表示ユニット40、音声出力ユニット50、及び入力装置60を備える。
【0031】
自立測位装置10は、加速度センサ11、角速度センサ12及び距離センサ13を備える。加速度センサ11は、例えば圧電素子からなり、車両の加速度を検出し、加速度データを出力する。角速度センサ12は、例えば振動ジャイロからなり、車両の方向変換時における車両の角速度を検出し、角速度データ及び相対方位データを出力する。距離センサ13は、車両の車輪の回転に伴って発生されているパルス信号からなる車速パルスを計測する。
【0032】
GPS受信機18は、複数のGPS衛星から、測位用データが含まれる電波19を受信する。測位用データを用いて求められる緯度及び経度情報等は、車両の絶対的な位置を検出するために用いられる。
【0033】
システムコントローラ20は、インタフェース21、CPU(Central Processing Unit)22、ROM(Read Only Memory)23及びRAM(Random Access Memory)24を含んでおり、ナビゲーション装置200全体の制御を行う。
【0034】
インタフェース21は、加速度センサ11、角速度センサ12及び距離センサ13並びにGPS受信機18とのインタフェース動作を行う。そして、これらから、車速パルス、加速度データ、相対方位データ、角速度データ、GPS測位データ、絶対方位データ等をシステムコントローラ20に入力する。CPU22は、システムコントローラ20全体を制御する。ROM23は、システムコントローラ20を制御する制御プログラム等が格納された図示しない不揮発性メモリ等を有する。RAM24は、入力装置60を介して利用者により予め設定された経路データ等の各種データを読み出し可能に格納したり、CPU22に対してワーキングエリアを提供したりする。
【0035】
システムコントローラ20、CD−ROMドライブ又はDVD−ROMドライブなどのディスクドライブ31、データ記憶ユニット36、通信用インタフェース37、表示ユニット40、音声出力ユニット50及び入力装置60は、バスライン30を介して相互に接続されている。
【0036】
ディスクドライブ31は、システムコントローラ20の制御の下、CD又はDVDといったディスク33から、音楽データ、映像データなどのコンテンツデータを読み出し、出力する。なお、ディスクドライブ31は、CD−ROMドライブ又はDVD−ROMドライブのうち、いずれか一方としても良いし、CD及びDVDコンパチブルのドライブとしても良く、また、テレビチューナを内蔵したハードディスクレコーダでも良い。
【0037】
データ記憶ユニット36は、例えば、HDDなどにより構成され、地図データや施設データなどのナビゲーション処理に用いられる各種データを記憶する。
【0038】
通信装置38は、例えば、FMチューナやビーコンレシーバ、携帯電話や専用の通信カードなどにより構成され、通信用インタフェース37を介して、VICS(Vehicle Information Communication System)センタから配信される渋滞や交通情報などの道路交通情報を受信したり、所定のサーバからの種々の情報(例えば、天気情報等)を受信したりする。
【0039】
表示ユニット40は、システムコントローラ20の制御の下、各種表示データをディスプレイなどの表示装置に表示する。具体的には、システムコントローラ20は、データ記憶ユニット36から地図データを読み出す。表示ユニット40は、システムコントローラ20によってデータ記憶ユニット36から読み出された地図データを、ディスプレイなどの表示画面上に表示する。表示ユニット40は、バスライン30を介してCPU22から送られる制御データに基づいて表示ユニット40全体の制御を行うグラフィックコントローラ41と、VRAM(Video RAM)等のメモリからなり即時表示可能な画像情報を一時的に記憶するバッファメモリ42と、グラフィックコントローラ41から出力される画像データに基づいて、液晶、CRT(Cathode Ray Tube)等のディスプレイ44を表示制御する表示制御部43と、ディスプレイ44とを備える。ディスプレイ44は、例えば対角5〜10インチ程度の液晶表示装置等からなり、車内のフロントパネル付近に装着される。
【0040】
音声出力ユニット50は、システムコントローラ20の制御の下、ディスクドライブ31、又はRAM24等からバスライン30を介して送られる音声デジタルデータのD/A(Digital to Analog)変換を行うD/Aコンバータ51と、D/Aコンバータ51から出力される音声アナログ信号を増幅する増幅器(AMP)52と、増幅された音声アナログ信号を音声に変換して車内に出力するスピーカ53とを備えて構成されている。
【0041】
入力装置60は、各種コマンドやデータを入力するための、キー、スイッチ、ボタン、リモコン、音声入力装置等から構成されている。入力装置60は、車内に搭載された当該車載用電子システムの本体のフロントパネルやディスプレイ44の周囲に配置される。また、ディスプレイ44がタッチパネル方式である場合には、ディスプレイ44の表示画面上に設けられたタッチパネルも入力装置60として機能する。
【0042】
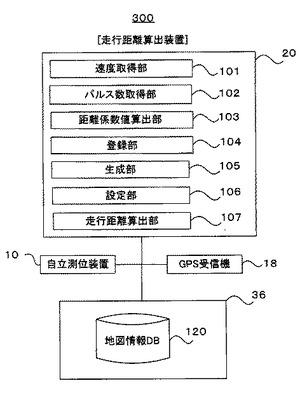
[走行距離算出装置]
図3に走行距離算出装置300の機能構成を示す。走行距離算出装置300は、実体的には、ナビゲーション装置200の構成要素により構成される。走行距離算出装置300は、図示のように、自立測位装置10と、GPS受信機18と、システムコントローラ20と、データ記憶ユニット36とを備える。データ記憶ユニット36は、地図情報DB120等、各種情報を記憶する。システムコントローラ20は、速度取得部101と、パルス数取得部102と、距離係数値算出部103と、登録部104と、生成部105と、設定部106と、走行距離算出部107とを備える。即ち、システムコントローラ20が所定のプログラムを実行することにより、速度取得部101と、パルス数取得部102と、距離係数値算出部103と、登録部104と、生成部105と、設定部106と、走行距離算出部107とを実現する。地図情報DB120は、地図情報を保持するデータベースである。
【0043】
速度取得部101は、GPS受信機18を介してGPS速度を所定期間取得する。そして、パルス数取得部102は、自立測位装置10内の距離センサ13を介して、速度取得部101が速度を取得していた走行期間内のパルス数を取得する。
【0044】
距離係数値算出部103は、上記速度取得部101が取得した速度と、当該GPS速度を取得していた走行期間とを用いて距離を算出し、当該距離と、当該走行期間内のパルス数とを用いて距離係数値を算出する。
【0045】
なお、距離係数値算出部103は、上記のように取得した速度に基づいて距離を算出し、当該距離を用いて、距離係数値を算出する場合について述べたが、本発明は、これに限られず、地図情報DB120を参照して、速度取得部101がGPS受信機18を介して取得したGPS測位情報(緯度経度情報)に基づいて、速度取得開始位置から終了位置までの距離を算出し、当該距離を用いて距離係数値を算出するようにしても良い。
【0046】
登録部104は、上記速度取得部101が取得した速度と上記距離係数算出部103が算出してきた距離係数値とを用いて、速度域毎に、上記速度の平均速度と、上記距離係数値の平均距離係数値とを、近似式生成用情報として登録する。
【0047】
具体的に、登録部104は、上記速度取得部101が取得した速度に対応する速度域を特定し、当該速度域における登録済みの平均速度と上記速度取得部101が取得した速度とに基づいて平均速度の再計算をする。
【0048】
そして、登録部104は、距離係数値算出部103が算出した距離係数値と、上記速度域に対応する登録済みの平均距離係数値とを用いて、平均距離係数値の再計算をする。
【0049】
そして、登録部104が再計算した平均速度と、平均距離係数値とを速度域における平均速度、平均距離係数値として更新登録する。
【0050】
生成部105は、登録部104が登録した近似式生成用情報(平均速度、平均距離係数値)を用いて近似式を生成する。具体的に、生成部105は、各速度域における、近似式生成用情報を用いて最小二乗法で近似式を算出する。
【0051】
設定部106は、生成部105が近似式を生成した後に、当該近似式を用いて、速度取得部101が取得したGPS速度に対応する距離係数値を設定する。
【0052】
走行距離算出部107は、設定部106が設定した距離係数値と、GPS速度計測時のパルス数とを用いて走行距離を算出する。
【0053】
なお、本実施例における走行距離算出装置300は、距離係数近似式生成装置としても機能する。
【0054】
[近似式生成方法]
次に、本実施例による近似式生成方法について説明する。本実施例における近似式生成方法とは、速度を取得すると共に、当該速度取得時の距離係数値を算出し、取得した速度と距離係数値とについて、速度域毎に平均化し、平均化した速度と距離係数値とを用いて最小二乗法で近似式を生成することをいう。
【0055】
まず、速度取得部101は、GPS速度を取得し、パルス数取得部102は、速度取得部101がGPS速度を取得していた時のパルス数を取得する。
【0056】
距離係数値算出部103は、上記速度取得部101が速度を取得していた期間における距離と、上記パルス数取得部102が取得したパルス数とを用いて距離係数値を算出する。
【0057】
登録部104は、速度取得部101が取得した速度に対応する速度域における登録済みの平均速度について、速度取得部101が取得した速度を用いて上記平均速度の更新を行う。また、登録部104は、速度取得部101が取得した速度に対応する速度域における登録済みの平均距離係数値について、距離係数値算出部103が算出した距離係数値を用いて平均距離係数値の更新を行う。そして、登録部104は、更新した平均速度と、更新した平均距離係数値とを更新登録する。
【0058】
そして、登録部104は、速度取得部101が取得した速度に対応する速度域の距離係数値算出回数をインクリメントする。
【0059】
そして、生成部105は、各速度域の距離係数値算出回数を参照した結果、当該距離係数値算出回数が所定の閾値(例えば、50回)以上である場合に、各速度域における平均速度と平均距離係数値とを用いて、最小二乗法で近似式を算出する。
【0060】
このように、走行距離算出装置300は、速度計測時における距離やパルス数を取得し、当該距離及びパルス数を用いて距離係数値を算出し、予め定義されている速度域毎に、計測した速度の平均速度と、平均距離係数値とを更新登録し、登録した平均速度と平均距離係数値とを用いて、速度と距離係数値との相関関係を定義した近似式を算出している。
【0061】
これによれば、走行距離算出装置300は、取得した速度を近似式に代入することで、速度に対応した距離係数値を取得することができ、固定の距離係数値を用いる場合に比して、より適切な距離係数値を取得することができる。
【0062】
従って、走行距離算出装置300は、速度変化等により1パルス当たりの距離が変わった場合等、車両の速度と車速パルス数が比例しない状況においても上記のような距離係数近似式を利用すれば、各速度に対応する距離係数を算出することができるので、車両の走行距離を適切に算出することができる。
【0063】
[距離係数近似式生成処理]
以下に、距離係数近似式生成処理の手順について図4に示すフローチャートを用いて説明する。この処理は、走行距離算出装置300のシステムコントローラ20が、予め用意されたプログラムを実行することにより実現される。
【0064】
まず、速度取得部101は、GPS速度を取得できるか否かを判断し(ステップS1)、マルチパス等の危険性がなく、GPSから測位情報を取得することができると判断した場合(ステップS1;Yes)、GPS速度を取得する(ステップS2)。
【0065】
そして、パルス数取得部102は、上記速度取得部101がGPS速度を取得していた間のパルス数を取得する(ステップS3)。
【0066】
そして、距離係数値算出部103は、上記速度取得部101がGPS速度を取得していた期間における距離と、上記パルス数取得部102が取得したパルス数とを用いて距離係数値を算出する(ステップS4)。
【0067】
そして、登録部104は、速度取得部101が取得した速度に対応する速度域における登録済みの平均速度について、速度取得部101が取得したGPS速度を用いて上記平均速度の更新を行う。また、登録部104は、速度取得部101が取得した速度に対応する速度域における登録済みの平均距離係数値について、距離係数値算出部103が算出した距離係数値を用いて平均距離係数値の更新を行う。そして、登録部104は、更新した平均速度と、更新した平均距離係数値とを更新登録する(ステップS5)。
【0068】
そして、登録部104は、速度取得部101が取得した速度に対応する速度域の距離係数値算出回数をインクリメントする(ステップS6)。
【0069】
生成部105は、各速度域の距離係数値算出回数を参照した結果、距離係数値算出回数が閾値以上である場合に(ステップS7;Yes)、各速度域における平均速度と平均距離係数値とを用いて、最小二乗法で近似式を算出する(ステップS8)。生成部105が近似式を生成した後に、近似式生成処理を終了する。
【0070】
[近似式対応走行距離算出処理]
以下に、近似式対応走行距離算出処理の手順について図5に示すフローチャートを用いて説明する。この処理は、走行距離算出装置300のシステムコントローラ20が、予め用意されたプログラムを実行することにより実現される。また、近似式対応走行距離算出処理とは、生成部105が生成した近似式を用いて走行距離を算出する処理をいう。
【0071】
まず、速度取得部101は、GPS速度を取得し(ステップS11)、パルス数取得部102は、速度取得部101が取得していた期間のパルス数を取得する(ステップS12)。
【0072】
そして、設定部106は、近似式が登録されているか否かを判断し(ステップS13)、近似式が登録されていない場合(ステップS13;No)、速度取得部101が取得したGPS速度に対応する速度域の登録済み距離係数値を、走行距離算出用の距離係数値とする(ステップS14)。
【0073】
そして、設定部106は、近似式が登録されている場合(ステップS13;Yes)、近似式を用いて、速度取得部101が取得した走行速度(GPS速度)に対応する走行距離算出用の距離係数値を算出する(ステップS15)。
【0074】
そして、走行距離算出部107は、パルス数取得部102が取得したパルス数に、上記設定部106が設定した距離係数値を乗ずることにより、走行距離を算出し(ステップS16)、近似式対応走行距離算出処理を終了する。
【0075】
このように、走行距離算出装置300は、近似式が存在していれば、当該近似式を用いて距離係数値を算出しているので、速度変化等によりタイヤの動径半径が変化しても、走行速度に応じた距離係数値を算出することができ、当該距離係数値を用いて適切な走行距離を算出することができる。
【0076】
また、走行距離算出装置300は、上記近似式を用いて適切な走行距離を算出するので、正確な走行速度を算出することが可能となる。
【0077】
以上述べたように、走行距離算出装置300は、移動体の走行速度を取得する速度取得手段と、移動体の走行時のパルス数を取得するパルス数取得手段と、走行速度とパルス数とに基づいて距離係数値を算出する距離係数値算出手段と、速度域毎に、走行速度の平均値と前記距離係数値の平均値とを登録する登録手段と、速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成手段と、を備える。
【0078】
走行距離算出装置300は、取得した速度を近似式に代入することで、速度に対応した距離係数値を取得することができ、固定の距離係数値を用いる場合に比して、より適切な距離係数値を取得することができる。
【0079】
また、走行距離算出装置300は、速度に応じた距離係数を用いることで、1つの距離係数から算出する距離よりも真値に近い距離が算出可能である。そして、走行距離算出装置300は、車速パルス数が車速に比例しない特性を認識可能であるので、距離の補正を行う際にも使用できる。更に、走行距離算出装置300は、複数の距離係数値から得られた近似関数から、比例しない特性の中でも傾向によって分類を行うことが可能となり、距離の補正などに役立つ。
【0080】
また、走行距離算出装置300は、車速パルス数が車速に比例する車両に対しても、複数の距離係数値から得られた近似関数から、タイヤの動的半径の変化状況をつかむことができ、固定の距離係数値を使用する場合に比べ、より高い精度の距離係数値を得ることができる。これにより、走行距離算出装置300は、車速パルス数が車速に比例する車両に対しても、近年増加傾向にある車速パルス数が車速に比例しない車両に対しても、より高い位置精度のナビゲーションを提供することができる。
【0081】
また、距離係数近似式生成装置300は、複数の距離係数値から得られた近似関数から、傾向ごとに特性の分類を行うことができる。このように、距離係数近似式生成装置300が分類結果を得るので、距離係数近似式生成装置300の利用者がアダプタの種類に基づいて特性の傾向をつかむことも可能となる。
【0082】
[他の実施例]
上述の実施例では、速度取得部101が、GPS受信機18を介してGPSデータが受信できる場合について述べたが、GPSデータを受信できない場合でも、過去取得したGPS速度を利用して近似式に代入することにより対応ができる。具体例として、速度算出方法を以下に示す。
【0083】
(手順1)速度取得部101が、過去算出した距離係数値の内、最新の距離係数値を使用して、近似センサ速度S1を算出する。
【0084】
(手順2)速度取得部101が、前回算出した近似センサ速度S0が存在する場合に、S1とS0との差を求め、当該差を速度差Dに足し合わせる。
【0085】
(手順3)速度取得部101が、基準とするGPS速度(近似距離係数値算出に使用した過去最新のGPS速度)に速度差Dを加えることで、近似式に代入する速度Sとする。
【0086】
上記(手順1)〜(手順3)に従い、速度取得部101が、速度を取得すれば、GPS速度を取得できない状況でも距離係数値を算出することが可能となる。
【0087】
なお、速度取得部101は、速度Sを算出した後に、上記近似センサ速度S1をS0として格納する。また、速度取得部101は、距離係数値に基づいた近似センサ速度を算出し、差分速度を算出する場合について述べたが、GPS速度を取得できなくなった後に、計測した加速度センサの出力に基づく速度又は移動体のホイールに設置されたホイールエンコーダの出力に基づく速度に基づいて差分速度を計測するようにしても良い。例えば、速度取得部101は、GPS速度を取得できなくなった後に、ホイールエンコーダにより得られた速度と直近のホイールエンコーダにより得られた速度との変化量を算出し、当該変化量とGPS速度を取得できなくなってからの経過時間に基づいて差分速度を算出し、当該差分速度と直近のGPS速度とを用いて車両の速度を算出する。
【0088】
上述の実施例では、生成部105が、最小二乗法を用いて近似式を生成する場合について述べたが、本発明は、これに限られず、他の種々の方法で近似式を生成するようにしても良い。
【0089】
上述の実施例では、特に記載しなかったが、搭載される車両が特定されている場合などは、搭載される車両の車速パルス特性やタイヤ動的半径特性を事前に調査し、調査した内容に基づく距離係数値を、走行距離算出装置300の速度域毎の距離係数値の初期値として用いても良い。
【0090】
上述の実施例では、特に記載しなかったが、走行距離算出装置300は、距離係数値算出部103が算出した距離係数値等を用いて、得られた車速周期の特性が、ナビゲーション装置と不整合を頻繁に発生してしまうことを検知した場合に、エラー情報をログ情報として保存したり、表示装置40へ表示したりしても良い。
【0091】
上述の実施例では、速度取得部101は、GPS受信機18を介してGPS速度を取得する場合について述べたが、本発明はこれに限られず、移動体の加速度を検出する加速度センサの出力に基づく速度や移動体のホイールに設置されたホイールエンコーダの出力に基づく速度を走行速度として取得しても良いし、他の種々の方法で求めた速度を取得するようにしても良い。
【図面の簡単な説明】
【0092】
【図1】車速パルスを取得方法の概念図である。
【図2】ナビゲーション装置の概略構成を示すブロック図である。
【図3】走行距離算出装置の機能ブロック図である。
【図4】距離係数近似式生成処理のフローチャートである。
【図5】近似式対応走行距離算出処理のフローチャートである。
【符号の説明】
【0093】
10 自立測位装置
18 GPS受信機
20 システムコントローラ
36 データ記憶ユニット
101 速度取得部
102 パルス数取得部
103 距離係数値算出部
104 登録部
105 生成部
106 設定部
107 走行距離算出部
120 地図情報DB
200 ナビゲーション装置
300 走行距離算出装置
【技術分野】
【0001】
本発明は、距離係数の近似式を生成する技術に関する。
【背景技術】
【0002】
車両の相対走行距離は、車輪の回転数を検出する距離センサにて出力された車速パルスに基づく車速パルス数に、所定の距離係数値を乗ずることにより求められる。この距離係数値は、車速パルスの1パルス当たりの走行距離である。走行距離に比例してパルスが発生するため、車速とパルス数は比例し、距離係数値はほぼ一定値を取る。よって、図1(A)に示すようなハードワイヤから車速信号を取得しているデータの特性である、車両の速度と車速パルス数が比例していることが前提となる。
【0003】
ところで、近年、車内LAN(Local Area Network)化が進み、図1(B)に示すように、車内LANデータ取得用の変換処理を行うアダプタ等を介して、デジタル変換されたデータを基に処理が行われている。
【0004】
データを変換するアダプタによっては、デジタルデータ変換時や、デジタルデータをアナログ電圧へ変換する際などに誤差が生まれる。これにより、車両の速度と車速パルス数が比例しない状況が起こり、そういったアダプタを使用している車両に関しては、正確な距離との誤差が大きくなる可能性を含んでいるという問題点があった。
【0005】
また、車両の走行中、速度変化に応じてタイヤが遠心力により膨張することにより、タイヤの半径が変化してしまい、車速パルスの1パルス当たりの走行距離や車速パルスの出力タイミングが変わってしまうので、車両の相対走行距離に誤差が生じてしまうという問題があった。
【0006】
ところで、速度域毎に、距離係数値を複数持つことにより、車両の速度変化に対応した距離係数値を用いて相対走行距離を算出するナビゲーション装置がある(例えば、特許文献1参照)。
【0007】
【特許文献1】特開2005−257665号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
上述のナビゲーション装置は、所定の速度域毎に距離係数値を保持しているが、計測していない速度に関しては、必ずしも適切な距離係数値となるわけではなく、また、全ての速度域の距離係数値を算出しようとすると、距離係数の算出負荷がかかるという問題があった。
【0009】
本発明が解決しようとする課題としては、上記のものが例として挙げられる。本発明の目的は、固定の距離係数を用いる場合に比して、精度の高い距離係数を算出することができる距離係数の近似式を生成することができる距離係数近似式生成装置を提供することにある。
【課題を解決するための手段】
【0010】
請求項1に記載の発明は、移動体の走行速度を取得する速度取得手段と、前記移動体の走行時のパルス数を取得するパルス数取得手段と、前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出手段と、速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録手段と、速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成手段と、を備えることを特徴とする。
【0011】
請求項6に記載の発明は、距離係数近似式生成方法であって、移動体の走行速度を取得する速度取得工程と、前記移動体の走行時のパルス数を取得するパルス数取得工程と、前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出工程と、速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録工程と、速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成工程を備えることを特徴とする。
【0012】
請求項7に記載の発明は、コンピュータを備える装置によって実行される距離係数近似式生成プログラムであって、移動体の走行速度を取得する速度取得手段と、前記移動体の走行時のパルス数を取得するパルス数取得手段と、前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出手段と、速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録手段と、速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成手段、として前記コンピュータを機能させることを特徴とする。
【発明を実施するための最良の形態】
【0013】
本発明の好適な実施形態では、距離係数近似式生成装置は、移動体の走行速度を取得する速度取得手段と、前記移動体の走行時のパルス数を取得するパルス数取得手段と、前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出手段と、速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録手段と、速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成手段と、を備える。
【0014】
上記の距離係数近似式生成装置は、具体的には、ナビゲーション装置等に適用できる。そして、距離係数近似式生成装置では、速度取得手段が、移動体の走行速度を取得し、パルス数取得手段が、速度取得時の車速パルスを取得し、距離係数値算出手段が上記走行速度と、上記パルス数を用いて距離係数値を算出する。
【0015】
そして、登録手段は、所定の速度域(例えば、10km/h)毎に、上記走行速度の平均値と上記距離係数値の平均値とを登録し、生成手段が上記走行速度の平均値と、上記距離係数値の平均値とを用いて最小二乗法等で距離係数近似式を生成する。
【0016】
このように、距離係数近似式生成装置は、所定の速度と、当該速度に対応する距離係数値を算出し、速度域毎の、上記速度と距離係数値との平均値を算出し、距離係数値の近似式を算出することにより、速度と、距離係数値との相関関係を定義することができる。
【0017】
これによれば、距離係数近似式生成装置は、取得した速度を近似式に代入することで、速度に対応した距離係数値を取得することができ、固定の距離係数値を用いる場合に比して、より適切な距離係数値を取得することができる。従って、距離係数近似式生成装置が取得した距離係数値を用いれば、正確な走行距離を算出することができる。
【0018】
上記の距離係数近似式生成装置の一態様では、前記速度取得手段は、GPS速度、前記移動体の加速度を検知する加速度センサの出力に基づく速度又は前記移動体のホイールに設置されたホイールエンコーダの出力に基づく速度を走行速度として取得する。この場合、距離係数近似式生成装置は、GPS速度、加速度センサ又はホイールエンコーダを用いて距離係数値の近似式を算出することができる。従って、距離係数近似式生成装置は、所定の方法で取得した速度と当該近似式とを用いて、速度に応じた距離係数値を取得することができる。
【0019】
上記の距離係数近似式生成装置の他の一態様では、前記速度取得手段は、直近のGPS速度に所定の差分速度を加えた速度を走行速度として取得する。これによれば、距離係数近似式生成装置は、トンネル内を通過している場合等、GPS速度を計測できない状況においても、距離係数近似式生成装置を搭載している車両等の速度を算出することができ、当該速度に基づいて距離係数値の近似式を算出することができる。従って、距離係数近似式生成装置は、所定の方法で取得した速度と当該近似式とを用いて、速度に応じた距離係数値を取得することができる。
【0020】
上記の距離係数近似式生成装置の他の一態様では、前記差分速度は、前記移動体の加速度を検知する加速度センサの出力に基づく速度又は前記移動体のホイールに設置されたホイールエンコーダの出力に基づく速度から取得した差分速度である。この場合、距離係数近似式生成装置は、加速度センサやホイールエンコーダから取得した速度を用いて差分速度を算出することができる。
【0021】
本発明の他の観点では、上記の距離係数近似式生成装置を搭載する走行距離算出装置であって、前記走行取得手段が取得した走行速度及び前記距離係数近似式に基づいて、前記走行速度に対応する距離係数値を設定する設定手段と、前記パルス数取得手段が取得したパルス数及び前記走行速度に対応する距離係数値に基づいて前記移動体の走行距離を算出する走行距離算出手段と、を備える。この場合、走行距離算出装置は、上記距離係数近似式を用いて距離係数値を算出することにより、速度変化等によるタイヤの動径半径の変化に対応した適切な距離係数値を算出しているので、適切な走行距離を算出することができる。
【0022】
本発明の他の観点では、距離係数近似式生成方法であって、移動体の走行速度を取得する速度取得工程と、前記移動体の走行時のパルス数を取得するパルス数取得工程と、前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出工程と、速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録工程と、速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成工程を備える。
【0023】
このような距離係数近似式生成方法によっても、所定の速度と、当該速度に対応する距離係数値を算出し、速度域毎の、上記速度と距離係数値との平均値を算出し、距離係数値の近似式を算出することにより、速度と、距離係数値との相関関係を定義することができるので、取得した速度を近似式に代入することで、速度に対応した距離係数値を取得することができ、固定の距離係数値を用いる場合に比して、より適切な距離係数値を取得することができる。
【0024】
本発明の他の観点では、コンピュータを備える装置によって実行される距離係数近似式生成プログラムであって、移動体の走行速度を取得する速度取得手段と、前記移動体の走行時のパルス数を取得するパルス数取得手段と、前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出手段と、速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録手段と、速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成手段、として前記コンピュータを機能させる。このような距離係数近似式生成プログラムを、各種装置上で実行することにより、本発明の距離係数近似式生成装置を実現することができる。なお、上記距離係数近似式生成プログラムは記録媒体に記録した状態で好適に取り扱うことができる。
【実施例】
【0025】
以下、図面を参照して本発明の好適な実施例について説明する。
【0026】
[概要]
本実施例における走行距離算出装置は、後述するナビゲーション装置に適用する。走行距離算出装置は、予め速度域を定義しておく(例えば、10[km/h]刻み等)。そして、走行距離算出装置は、GPS速度を取得し、GPS速度検出時の車速パルス数を取得し、GPS速度検出時の走行距離と、上記車速パルス数とから距離係数値を算出する。
【0027】
そして、走行距離算出装置は、速度域毎で、GPS速度の平均値と、距離係数値の平均値とを算出し、GPS速度の平均値と、当該距離係数値の平均値とを保持しておく。
【0028】
そして、走行距離算出装置は、所定回数分、距離係数値を算出した後に、各速度域における距離係数値の平均値と、平均速度とを用いて最小二乗法で、距離係数近似式を生成する。
【0029】
このように、走行距離算出装置は、速度変化等により1パルス当たりの距離が変わった場合等、車両の速度と車速パルス数とが比例しない状況においても上記のような距離係数近似式を利用すれば、各速度に対応する距離係数を算出することができるので、車両の走行距離を適切に算出することができる。
【0030】
[ナビゲーション装置]
図2に、本発明の実施例に係るナビゲーション装置200の構成を示す。図2に示すように、ナビゲーション装置200は、自立測位装置10、GPS受信機18、システムコントローラ20、ディスクドライブ31、データ記憶ユニット36、通信用インタフェース37、通信装置38、表示ユニット40、音声出力ユニット50、及び入力装置60を備える。
【0031】
自立測位装置10は、加速度センサ11、角速度センサ12及び距離センサ13を備える。加速度センサ11は、例えば圧電素子からなり、車両の加速度を検出し、加速度データを出力する。角速度センサ12は、例えば振動ジャイロからなり、車両の方向変換時における車両の角速度を検出し、角速度データ及び相対方位データを出力する。距離センサ13は、車両の車輪の回転に伴って発生されているパルス信号からなる車速パルスを計測する。
【0032】
GPS受信機18は、複数のGPS衛星から、測位用データが含まれる電波19を受信する。測位用データを用いて求められる緯度及び経度情報等は、車両の絶対的な位置を検出するために用いられる。
【0033】
システムコントローラ20は、インタフェース21、CPU(Central Processing Unit)22、ROM(Read Only Memory)23及びRAM(Random Access Memory)24を含んでおり、ナビゲーション装置200全体の制御を行う。
【0034】
インタフェース21は、加速度センサ11、角速度センサ12及び距離センサ13並びにGPS受信機18とのインタフェース動作を行う。そして、これらから、車速パルス、加速度データ、相対方位データ、角速度データ、GPS測位データ、絶対方位データ等をシステムコントローラ20に入力する。CPU22は、システムコントローラ20全体を制御する。ROM23は、システムコントローラ20を制御する制御プログラム等が格納された図示しない不揮発性メモリ等を有する。RAM24は、入力装置60を介して利用者により予め設定された経路データ等の各種データを読み出し可能に格納したり、CPU22に対してワーキングエリアを提供したりする。
【0035】
システムコントローラ20、CD−ROMドライブ又はDVD−ROMドライブなどのディスクドライブ31、データ記憶ユニット36、通信用インタフェース37、表示ユニット40、音声出力ユニット50及び入力装置60は、バスライン30を介して相互に接続されている。
【0036】
ディスクドライブ31は、システムコントローラ20の制御の下、CD又はDVDといったディスク33から、音楽データ、映像データなどのコンテンツデータを読み出し、出力する。なお、ディスクドライブ31は、CD−ROMドライブ又はDVD−ROMドライブのうち、いずれか一方としても良いし、CD及びDVDコンパチブルのドライブとしても良く、また、テレビチューナを内蔵したハードディスクレコーダでも良い。
【0037】
データ記憶ユニット36は、例えば、HDDなどにより構成され、地図データや施設データなどのナビゲーション処理に用いられる各種データを記憶する。
【0038】
通信装置38は、例えば、FMチューナやビーコンレシーバ、携帯電話や専用の通信カードなどにより構成され、通信用インタフェース37を介して、VICS(Vehicle Information Communication System)センタから配信される渋滞や交通情報などの道路交通情報を受信したり、所定のサーバからの種々の情報(例えば、天気情報等)を受信したりする。
【0039】
表示ユニット40は、システムコントローラ20の制御の下、各種表示データをディスプレイなどの表示装置に表示する。具体的には、システムコントローラ20は、データ記憶ユニット36から地図データを読み出す。表示ユニット40は、システムコントローラ20によってデータ記憶ユニット36から読み出された地図データを、ディスプレイなどの表示画面上に表示する。表示ユニット40は、バスライン30を介してCPU22から送られる制御データに基づいて表示ユニット40全体の制御を行うグラフィックコントローラ41と、VRAM(Video RAM)等のメモリからなり即時表示可能な画像情報を一時的に記憶するバッファメモリ42と、グラフィックコントローラ41から出力される画像データに基づいて、液晶、CRT(Cathode Ray Tube)等のディスプレイ44を表示制御する表示制御部43と、ディスプレイ44とを備える。ディスプレイ44は、例えば対角5〜10インチ程度の液晶表示装置等からなり、車内のフロントパネル付近に装着される。
【0040】
音声出力ユニット50は、システムコントローラ20の制御の下、ディスクドライブ31、又はRAM24等からバスライン30を介して送られる音声デジタルデータのD/A(Digital to Analog)変換を行うD/Aコンバータ51と、D/Aコンバータ51から出力される音声アナログ信号を増幅する増幅器(AMP)52と、増幅された音声アナログ信号を音声に変換して車内に出力するスピーカ53とを備えて構成されている。
【0041】
入力装置60は、各種コマンドやデータを入力するための、キー、スイッチ、ボタン、リモコン、音声入力装置等から構成されている。入力装置60は、車内に搭載された当該車載用電子システムの本体のフロントパネルやディスプレイ44の周囲に配置される。また、ディスプレイ44がタッチパネル方式である場合には、ディスプレイ44の表示画面上に設けられたタッチパネルも入力装置60として機能する。
【0042】
[走行距離算出装置]
図3に走行距離算出装置300の機能構成を示す。走行距離算出装置300は、実体的には、ナビゲーション装置200の構成要素により構成される。走行距離算出装置300は、図示のように、自立測位装置10と、GPS受信機18と、システムコントローラ20と、データ記憶ユニット36とを備える。データ記憶ユニット36は、地図情報DB120等、各種情報を記憶する。システムコントローラ20は、速度取得部101と、パルス数取得部102と、距離係数値算出部103と、登録部104と、生成部105と、設定部106と、走行距離算出部107とを備える。即ち、システムコントローラ20が所定のプログラムを実行することにより、速度取得部101と、パルス数取得部102と、距離係数値算出部103と、登録部104と、生成部105と、設定部106と、走行距離算出部107とを実現する。地図情報DB120は、地図情報を保持するデータベースである。
【0043】
速度取得部101は、GPS受信機18を介してGPS速度を所定期間取得する。そして、パルス数取得部102は、自立測位装置10内の距離センサ13を介して、速度取得部101が速度を取得していた走行期間内のパルス数を取得する。
【0044】
距離係数値算出部103は、上記速度取得部101が取得した速度と、当該GPS速度を取得していた走行期間とを用いて距離を算出し、当該距離と、当該走行期間内のパルス数とを用いて距離係数値を算出する。
【0045】
なお、距離係数値算出部103は、上記のように取得した速度に基づいて距離を算出し、当該距離を用いて、距離係数値を算出する場合について述べたが、本発明は、これに限られず、地図情報DB120を参照して、速度取得部101がGPS受信機18を介して取得したGPS測位情報(緯度経度情報)に基づいて、速度取得開始位置から終了位置までの距離を算出し、当該距離を用いて距離係数値を算出するようにしても良い。
【0046】
登録部104は、上記速度取得部101が取得した速度と上記距離係数算出部103が算出してきた距離係数値とを用いて、速度域毎に、上記速度の平均速度と、上記距離係数値の平均距離係数値とを、近似式生成用情報として登録する。
【0047】
具体的に、登録部104は、上記速度取得部101が取得した速度に対応する速度域を特定し、当該速度域における登録済みの平均速度と上記速度取得部101が取得した速度とに基づいて平均速度の再計算をする。
【0048】
そして、登録部104は、距離係数値算出部103が算出した距離係数値と、上記速度域に対応する登録済みの平均距離係数値とを用いて、平均距離係数値の再計算をする。
【0049】
そして、登録部104が再計算した平均速度と、平均距離係数値とを速度域における平均速度、平均距離係数値として更新登録する。
【0050】
生成部105は、登録部104が登録した近似式生成用情報(平均速度、平均距離係数値)を用いて近似式を生成する。具体的に、生成部105は、各速度域における、近似式生成用情報を用いて最小二乗法で近似式を算出する。
【0051】
設定部106は、生成部105が近似式を生成した後に、当該近似式を用いて、速度取得部101が取得したGPS速度に対応する距離係数値を設定する。
【0052】
走行距離算出部107は、設定部106が設定した距離係数値と、GPS速度計測時のパルス数とを用いて走行距離を算出する。
【0053】
なお、本実施例における走行距離算出装置300は、距離係数近似式生成装置としても機能する。
【0054】
[近似式生成方法]
次に、本実施例による近似式生成方法について説明する。本実施例における近似式生成方法とは、速度を取得すると共に、当該速度取得時の距離係数値を算出し、取得した速度と距離係数値とについて、速度域毎に平均化し、平均化した速度と距離係数値とを用いて最小二乗法で近似式を生成することをいう。
【0055】
まず、速度取得部101は、GPS速度を取得し、パルス数取得部102は、速度取得部101がGPS速度を取得していた時のパルス数を取得する。
【0056】
距離係数値算出部103は、上記速度取得部101が速度を取得していた期間における距離と、上記パルス数取得部102が取得したパルス数とを用いて距離係数値を算出する。
【0057】
登録部104は、速度取得部101が取得した速度に対応する速度域における登録済みの平均速度について、速度取得部101が取得した速度を用いて上記平均速度の更新を行う。また、登録部104は、速度取得部101が取得した速度に対応する速度域における登録済みの平均距離係数値について、距離係数値算出部103が算出した距離係数値を用いて平均距離係数値の更新を行う。そして、登録部104は、更新した平均速度と、更新した平均距離係数値とを更新登録する。
【0058】
そして、登録部104は、速度取得部101が取得した速度に対応する速度域の距離係数値算出回数をインクリメントする。
【0059】
そして、生成部105は、各速度域の距離係数値算出回数を参照した結果、当該距離係数値算出回数が所定の閾値(例えば、50回)以上である場合に、各速度域における平均速度と平均距離係数値とを用いて、最小二乗法で近似式を算出する。
【0060】
このように、走行距離算出装置300は、速度計測時における距離やパルス数を取得し、当該距離及びパルス数を用いて距離係数値を算出し、予め定義されている速度域毎に、計測した速度の平均速度と、平均距離係数値とを更新登録し、登録した平均速度と平均距離係数値とを用いて、速度と距離係数値との相関関係を定義した近似式を算出している。
【0061】
これによれば、走行距離算出装置300は、取得した速度を近似式に代入することで、速度に対応した距離係数値を取得することができ、固定の距離係数値を用いる場合に比して、より適切な距離係数値を取得することができる。
【0062】
従って、走行距離算出装置300は、速度変化等により1パルス当たりの距離が変わった場合等、車両の速度と車速パルス数が比例しない状況においても上記のような距離係数近似式を利用すれば、各速度に対応する距離係数を算出することができるので、車両の走行距離を適切に算出することができる。
【0063】
[距離係数近似式生成処理]
以下に、距離係数近似式生成処理の手順について図4に示すフローチャートを用いて説明する。この処理は、走行距離算出装置300のシステムコントローラ20が、予め用意されたプログラムを実行することにより実現される。
【0064】
まず、速度取得部101は、GPS速度を取得できるか否かを判断し(ステップS1)、マルチパス等の危険性がなく、GPSから測位情報を取得することができると判断した場合(ステップS1;Yes)、GPS速度を取得する(ステップS2)。
【0065】
そして、パルス数取得部102は、上記速度取得部101がGPS速度を取得していた間のパルス数を取得する(ステップS3)。
【0066】
そして、距離係数値算出部103は、上記速度取得部101がGPS速度を取得していた期間における距離と、上記パルス数取得部102が取得したパルス数とを用いて距離係数値を算出する(ステップS4)。
【0067】
そして、登録部104は、速度取得部101が取得した速度に対応する速度域における登録済みの平均速度について、速度取得部101が取得したGPS速度を用いて上記平均速度の更新を行う。また、登録部104は、速度取得部101が取得した速度に対応する速度域における登録済みの平均距離係数値について、距離係数値算出部103が算出した距離係数値を用いて平均距離係数値の更新を行う。そして、登録部104は、更新した平均速度と、更新した平均距離係数値とを更新登録する(ステップS5)。
【0068】
そして、登録部104は、速度取得部101が取得した速度に対応する速度域の距離係数値算出回数をインクリメントする(ステップS6)。
【0069】
生成部105は、各速度域の距離係数値算出回数を参照した結果、距離係数値算出回数が閾値以上である場合に(ステップS7;Yes)、各速度域における平均速度と平均距離係数値とを用いて、最小二乗法で近似式を算出する(ステップS8)。生成部105が近似式を生成した後に、近似式生成処理を終了する。
【0070】
[近似式対応走行距離算出処理]
以下に、近似式対応走行距離算出処理の手順について図5に示すフローチャートを用いて説明する。この処理は、走行距離算出装置300のシステムコントローラ20が、予め用意されたプログラムを実行することにより実現される。また、近似式対応走行距離算出処理とは、生成部105が生成した近似式を用いて走行距離を算出する処理をいう。
【0071】
まず、速度取得部101は、GPS速度を取得し(ステップS11)、パルス数取得部102は、速度取得部101が取得していた期間のパルス数を取得する(ステップS12)。
【0072】
そして、設定部106は、近似式が登録されているか否かを判断し(ステップS13)、近似式が登録されていない場合(ステップS13;No)、速度取得部101が取得したGPS速度に対応する速度域の登録済み距離係数値を、走行距離算出用の距離係数値とする(ステップS14)。
【0073】
そして、設定部106は、近似式が登録されている場合(ステップS13;Yes)、近似式を用いて、速度取得部101が取得した走行速度(GPS速度)に対応する走行距離算出用の距離係数値を算出する(ステップS15)。
【0074】
そして、走行距離算出部107は、パルス数取得部102が取得したパルス数に、上記設定部106が設定した距離係数値を乗ずることにより、走行距離を算出し(ステップS16)、近似式対応走行距離算出処理を終了する。
【0075】
このように、走行距離算出装置300は、近似式が存在していれば、当該近似式を用いて距離係数値を算出しているので、速度変化等によりタイヤの動径半径が変化しても、走行速度に応じた距離係数値を算出することができ、当該距離係数値を用いて適切な走行距離を算出することができる。
【0076】
また、走行距離算出装置300は、上記近似式を用いて適切な走行距離を算出するので、正確な走行速度を算出することが可能となる。
【0077】
以上述べたように、走行距離算出装置300は、移動体の走行速度を取得する速度取得手段と、移動体の走行時のパルス数を取得するパルス数取得手段と、走行速度とパルス数とに基づいて距離係数値を算出する距離係数値算出手段と、速度域毎に、走行速度の平均値と前記距離係数値の平均値とを登録する登録手段と、速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成手段と、を備える。
【0078】
走行距離算出装置300は、取得した速度を近似式に代入することで、速度に対応した距離係数値を取得することができ、固定の距離係数値を用いる場合に比して、より適切な距離係数値を取得することができる。
【0079】
また、走行距離算出装置300は、速度に応じた距離係数を用いることで、1つの距離係数から算出する距離よりも真値に近い距離が算出可能である。そして、走行距離算出装置300は、車速パルス数が車速に比例しない特性を認識可能であるので、距離の補正を行う際にも使用できる。更に、走行距離算出装置300は、複数の距離係数値から得られた近似関数から、比例しない特性の中でも傾向によって分類を行うことが可能となり、距離の補正などに役立つ。
【0080】
また、走行距離算出装置300は、車速パルス数が車速に比例する車両に対しても、複数の距離係数値から得られた近似関数から、タイヤの動的半径の変化状況をつかむことができ、固定の距離係数値を使用する場合に比べ、より高い精度の距離係数値を得ることができる。これにより、走行距離算出装置300は、車速パルス数が車速に比例する車両に対しても、近年増加傾向にある車速パルス数が車速に比例しない車両に対しても、より高い位置精度のナビゲーションを提供することができる。
【0081】
また、距離係数近似式生成装置300は、複数の距離係数値から得られた近似関数から、傾向ごとに特性の分類を行うことができる。このように、距離係数近似式生成装置300が分類結果を得るので、距離係数近似式生成装置300の利用者がアダプタの種類に基づいて特性の傾向をつかむことも可能となる。
【0082】
[他の実施例]
上述の実施例では、速度取得部101が、GPS受信機18を介してGPSデータが受信できる場合について述べたが、GPSデータを受信できない場合でも、過去取得したGPS速度を利用して近似式に代入することにより対応ができる。具体例として、速度算出方法を以下に示す。
【0083】
(手順1)速度取得部101が、過去算出した距離係数値の内、最新の距離係数値を使用して、近似センサ速度S1を算出する。
【0084】
(手順2)速度取得部101が、前回算出した近似センサ速度S0が存在する場合に、S1とS0との差を求め、当該差を速度差Dに足し合わせる。
【0085】
(手順3)速度取得部101が、基準とするGPS速度(近似距離係数値算出に使用した過去最新のGPS速度)に速度差Dを加えることで、近似式に代入する速度Sとする。
【0086】
上記(手順1)〜(手順3)に従い、速度取得部101が、速度を取得すれば、GPS速度を取得できない状況でも距離係数値を算出することが可能となる。
【0087】
なお、速度取得部101は、速度Sを算出した後に、上記近似センサ速度S1をS0として格納する。また、速度取得部101は、距離係数値に基づいた近似センサ速度を算出し、差分速度を算出する場合について述べたが、GPS速度を取得できなくなった後に、計測した加速度センサの出力に基づく速度又は移動体のホイールに設置されたホイールエンコーダの出力に基づく速度に基づいて差分速度を計測するようにしても良い。例えば、速度取得部101は、GPS速度を取得できなくなった後に、ホイールエンコーダにより得られた速度と直近のホイールエンコーダにより得られた速度との変化量を算出し、当該変化量とGPS速度を取得できなくなってからの経過時間に基づいて差分速度を算出し、当該差分速度と直近のGPS速度とを用いて車両の速度を算出する。
【0088】
上述の実施例では、生成部105が、最小二乗法を用いて近似式を生成する場合について述べたが、本発明は、これに限られず、他の種々の方法で近似式を生成するようにしても良い。
【0089】
上述の実施例では、特に記載しなかったが、搭載される車両が特定されている場合などは、搭載される車両の車速パルス特性やタイヤ動的半径特性を事前に調査し、調査した内容に基づく距離係数値を、走行距離算出装置300の速度域毎の距離係数値の初期値として用いても良い。
【0090】
上述の実施例では、特に記載しなかったが、走行距離算出装置300は、距離係数値算出部103が算出した距離係数値等を用いて、得られた車速周期の特性が、ナビゲーション装置と不整合を頻繁に発生してしまうことを検知した場合に、エラー情報をログ情報として保存したり、表示装置40へ表示したりしても良い。
【0091】
上述の実施例では、速度取得部101は、GPS受信機18を介してGPS速度を取得する場合について述べたが、本発明はこれに限られず、移動体の加速度を検出する加速度センサの出力に基づく速度や移動体のホイールに設置されたホイールエンコーダの出力に基づく速度を走行速度として取得しても良いし、他の種々の方法で求めた速度を取得するようにしても良い。
【図面の簡単な説明】
【0092】
【図1】車速パルスを取得方法の概念図である。
【図2】ナビゲーション装置の概略構成を示すブロック図である。
【図3】走行距離算出装置の機能ブロック図である。
【図4】距離係数近似式生成処理のフローチャートである。
【図5】近似式対応走行距離算出処理のフローチャートである。
【符号の説明】
【0093】
10 自立測位装置
18 GPS受信機
20 システムコントローラ
36 データ記憶ユニット
101 速度取得部
102 パルス数取得部
103 距離係数値算出部
104 登録部
105 生成部
106 設定部
107 走行距離算出部
120 地図情報DB
200 ナビゲーション装置
300 走行距離算出装置
【特許請求の範囲】
【請求項1】
移動体の走行速度を取得する速度取得手段と、
前記移動体の走行時のパルス数を取得するパルス数取得手段と、
前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出手段と、
速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録手段と、
速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成手段と、
を備えることを特徴とする距離係数近似式生成装置。
【請求項2】
前記速度取得手段は、GPS速度、前記移動体の加速度を検知する加速度センサの出力に基づく速度又は前記移動体のホイールに設置されたホイールエンコーダの出力に基づく速度を走行速度として取得することを特徴とする請求項1に記載の距離係数近似式生成装置。
【請求項3】
前記速度取得手段は、直近のGPS速度に所定の差分速度を加えた速度を走行速度として取得することを特徴とする請求項1に記載の距離係数近似式生成装置。
【請求項4】
前記差分速度は、前記移動体の加速度を検知する加速度センサの出力に基づく速度又は前記移動体のホイールに設置されたホイールエンコーダの出力に基づく速度から取得した差分速度であることを特徴とする請求項3に記載の距離係数近似式生成装置。
【請求項5】
請求項1乃至4のいずれか一項に記載の距離係数近似式生成装置を搭載する走行距離算出装置であって、
前記走行取得手段が取得した走行速度及び前記距離係数近似式に基づいて、前記走行速度に対応する距離係数値を設定する設定手段と、
前記パルス数取得手段が取得したパルス数及び前記走行速度に対応する距離係数値に基づいて前記移動体の走行距離を算出する走行距離算出手段と、
を備えることを特徴とする走行距離算出装置。
【請求項6】
移動体の走行速度を取得する速度取得工程と、
前記移動体の走行時のパルス数を取得するパルス数取得工程と、
前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出工程と、
速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録工程と、
速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成工程と、
を備えることを特徴とする距離係数近似式生成方法。
【請求項7】
コンピュータを備える装置によって実行される距離係数近似式生成プログラムであって、
移動体の走行速度を取得する速度取得手段と、
前記移動体の走行時のパルス数を取得するパルス数取得手段と、
前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出手段と、
速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録手段と、
速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成手段、として前記コンピュータを機能させることを特徴とする距離係数近似式生成プログラム。
【請求項8】
請求項7に記載の距離係数近似式生成プログラムを記録したことを特徴とする記録媒体。
【請求項1】
移動体の走行速度を取得する速度取得手段と、
前記移動体の走行時のパルス数を取得するパルス数取得手段と、
前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出手段と、
速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録手段と、
速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成手段と、
を備えることを特徴とする距離係数近似式生成装置。
【請求項2】
前記速度取得手段は、GPS速度、前記移動体の加速度を検知する加速度センサの出力に基づく速度又は前記移動体のホイールに設置されたホイールエンコーダの出力に基づく速度を走行速度として取得することを特徴とする請求項1に記載の距離係数近似式生成装置。
【請求項3】
前記速度取得手段は、直近のGPS速度に所定の差分速度を加えた速度を走行速度として取得することを特徴とする請求項1に記載の距離係数近似式生成装置。
【請求項4】
前記差分速度は、前記移動体の加速度を検知する加速度センサの出力に基づく速度又は前記移動体のホイールに設置されたホイールエンコーダの出力に基づく速度から取得した差分速度であることを特徴とする請求項3に記載の距離係数近似式生成装置。
【請求項5】
請求項1乃至4のいずれか一項に記載の距離係数近似式生成装置を搭載する走行距離算出装置であって、
前記走行取得手段が取得した走行速度及び前記距離係数近似式に基づいて、前記走行速度に対応する距離係数値を設定する設定手段と、
前記パルス数取得手段が取得したパルス数及び前記走行速度に対応する距離係数値に基づいて前記移動体の走行距離を算出する走行距離算出手段と、
を備えることを特徴とする走行距離算出装置。
【請求項6】
移動体の走行速度を取得する速度取得工程と、
前記移動体の走行時のパルス数を取得するパルス数取得工程と、
前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出工程と、
速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録工程と、
速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成工程と、
を備えることを特徴とする距離係数近似式生成方法。
【請求項7】
コンピュータを備える装置によって実行される距離係数近似式生成プログラムであって、
移動体の走行速度を取得する速度取得手段と、
前記移動体の走行時のパルス数を取得するパルス数取得手段と、
前記走行速度と前記パルス数とに基づいて距離係数値を算出する距離係数値算出手段と、
速度域毎に、前記走行速度の平均値と前記距離係数値の平均値とを登録する登録手段と、
速度域毎の、走行速度の平均値と距離係数値の平均値とを用いて距離係数近似式を生成する生成手段、として前記コンピュータを機能させることを特徴とする距離係数近似式生成プログラム。
【請求項8】
請求項7に記載の距離係数近似式生成プログラムを記録したことを特徴とする記録媒体。
【図1】



【図2】
【図3】
【図4】

【図5】

【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−229268(P2009−229268A)
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願番号】特願2008−75579(P2008−75579)
【出願日】平成20年3月24日(2008.3.24)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願日】平成20年3月24日(2008.3.24)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
[ Back to top ]