
距離撮像
【課題】多数の距離画素を用いて距離像を撮像する。
【解決手段】撮像されるべき各々の距離像のためにアレイ配置された複数の送信器を使用して電磁波がそれぞれ送信パルスの形で送信され、反射されたエコーパルスはアレイ配置された複数の受信器を使用して検出され、前記送信パルスが反射されて距離画素を形成する物体のそれぞれの距離は前記パルス飛行時間の算出によって測定され、撮像されるべき各々の距離像のために前記受信アレイの後に接続された時間測定器を使用して複数の個別測定が実施される。
【解決手段】撮像されるべき各々の距離像のためにアレイ配置された複数の送信器を使用して電磁波がそれぞれ送信パルスの形で送信され、反射されたエコーパルスはアレイ配置された複数の受信器を使用して検出され、前記送信パルスが反射されて距離画素を形成する物体のそれぞれの距離は前記パルス飛行時間の算出によって測定され、撮像されるべき各々の距離像のために前記受信アレイの後に接続された時間測定器を使用して複数の個別測定が実施される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は独立請求項1及び34に記載の多数の距離画素を含む距離像を撮像するための方法及び装置に関する。本発明は更に、本発明による前記方法を実施するための及び/又は本発明による前記装置のための請求項64に記載の時間測定器を有するICモジュールに関する。
【背景技術】
【0002】
「距離像」とは本書において、距離画素の2次元配列として理解されるのみならず、1次元配列としても理解される。これらはプロファイルとも称され、つまりは、それぞれ互いに隣接配置された単列の距離画素を含む距離像である。
【0003】
距離測定の目的は、パルス電磁波(ここでは簡潔に「信号」又は「信号パルス」と称する)の送信と目標物によって反射された信号パルスいわゆる「エコーパルス」の到着との間の時間を測定することである。これらの時間は、電磁波の伝播速度が不変であるという性質に基づいて、反射目標物からの距離に変換することができる。この目的を満足する、ここで一括して「パルスTOFセンサ」と称する装置には多数の実施形態が存在する。TOFは「飛行時間」を意味しており、ここでは、信号パルスが目標物に達して戻るまでに要する時間を示す。
【0004】
既存のセンサは一般に以下を有する(図1〜6も参照)。
・パルス電磁波(14)を発生させる送信器(15)、例えば、光パルス(14)を発生させるパルスレーザダイオード(10)及び電流パルサ(11)を含むパルスレーザ(15)。
・反射された信号パルスを検出する受信器(8)、例えば、フォトダイオード又はAPD(アバランシェフォトダイオード)(2)、広帯域増幅器(3)、及び、ノイズパルスの検出を確実に避けるべく、基準(5)がアナログ出力信号のノイズの4.5NEP(ここで、「NEP」とは「ノイズ等価電力」−ノイズの実効値の補正電力−を意味する)よりも大きい比較器(4)。
・デジタル化された、つまり、比較器によってデジタル信号に変換されたスタートパルス及びエコーパルスを共に論理パルス又はゲートパルスに変換する時間測定回路。ここで、前記論理パルス又はゲートパルスは、
a)TAC(時間−アナログ変換器)を使用して電圧信号に直接変換され、この電圧は続いてADC(アナログ−デジタル変換器)を使用してデジタル値に変換されるか、又は
b)ゲートパルスにあたる測定クロック信号の正のフランクの爾後のカウント、即ちTOFのデジタル値を表すカウントによる正確な測定クロック信号のゲーティングに使用されるか、又は
c)ゲートパルスにあたる測定クロック信号の正のフランクの爾後のカウントによる測定クロック信号のゲーティングに使用されると共に、更に、2TPパルス(TP=部分期間)の導出に使用され、TPパルス幅はTACと続いてのアナログ−デジタル変換器を使用してデジタル値に変換され、TOFが部分値から集成されるか、又は
d)ゲートパルスにあたる測定クロック信号の正のフランクの爾後のカウントによる測定クロック信号のゲーティングに使用されると共に、更に、2TPパルスの導出に使用され、TPパルス幅はTDCを使用してデジタル数に変換され、TOFが部分値から集成される。
【0005】
時間測定回路又は該回路部分は多くの場合に、所要のスイッチング速度と複雑さのために、集積された「時間測定IC」として構成される。信号パルスは、複数のエコーがそれぞれ異なるTOFで時間測定回路に入るように連続的に配置された複数の目標物に当たるので、それらの当該ゲート幅が測定されなければならない。一定の時間測定回路において、複数のエコーの発生は少なくとも2エコーパルスに属するTOFが並列接続された2時間測定回路を使用して測定されることによって考慮される(倍パルス評価)。
【0006】
これらの単純なセンサは鏡スキャナを利用して2Dセンサに拡大され、或いは互いに直交配置された2台の鏡スキャナを利用して3Dセンサに拡大され、これらを用いて2D又は3D距離像を得ることができた。距離像は、CCDカメラで撮像された画像の場合のように色及び輝度ではなく、距離及びオプショナルに電力が各々の画素(多数の空間角セグメントを含むより大きな空間角の空間角セグメント)に対応させられて、生成される。
【0007】
既存のセンサは一般に、使用されるレーザモジュールの最大パルス繰返し周波数によって、測定値を得る速度が制限される。数100mの距離測定に要される数10ワットの電力を有するパルスレーザダイオードによるパルスレーザではパルス繰返し周波数はおよそ20〜30kHzに限界されるため、これらのセンサを使用した2D又は3D距離像の撮像は非常に緩慢に(数Hzで)しか行うことができない。これはCCDカメラのような純然たる画像センサに比較して非常に緩慢であり、所定の空間角内での動的プロセスの検出には不適である。
【0008】
ノイズパルスの回避が必要とされるため、一般に既存のパルスTOFセンサの感度はノイズの4.5NEPより大である。
【0009】
4.5NEPより大への感度の上昇は一般に、受信器のアナログ信号が高速走査速度を実現するACD(アナログ−デジタル変換器)によってデジタル化されることによって、達成され得た。測定が反復されて、アナログ/デジタル変換された測定信号が加算平均されれば、ノイズは加算平均深さの平方根だけ減少し、他方、信号パルスは同一レベルに維持されるであろう。そのために十分な測定時間が供されれば、これによりSN比は加算平均深さの平方根に比例して改善され、これは一般に感度の上昇に一致するであろう。但し、変換速度が数GHzでなければならないために技術的労力は膨大なものであり、平均値算出に要される演算労力も必然的にそれに比例して高まることになる。この理由で、現在のパルスTOFセンサの感度限界は一般に4.5NEPに等しいかそれより大であるので、このタイプのセンサは市場において枢要な意義を獲得するに至らなかった。
【0010】
[現在の技術水準のパルスTOFセンサの短所]
それ故従来の技術の短所は以下の通りである。
・エコーパルスと混同されて結果が偽化されるためにノイズパルスが検出されてはならないことから、感度(最小SN比)は4.5NEPに等しいかそれより大に限界される。
・TOFの間に単一のエコーパルス、稀な場合に2エコーパルスしか処理することができず、従って、雨、雪、霧又は汚濁したセンサ限界ガラス又は複数の衝突目標物からの反射はTOFの間に評価不能であり或いは測定を不可能にさえし得るため、パルスTOFセンサの外部使用は大きな制限を伴ってしか実現することができない。
・複数の信号パルス又は信号パルスの一部の並列処理は不可能である。
・一般に比較器閾値を低くセレクトするとTOFの間にますます多く発生するノイズパルスのような多数のパルスは既存の時間測定回路では測定不能である。
・2D距離撮像(プロファイル)は可動鏡付きのスキャナなしには不可能である。
・3D距離撮像は可動鏡付きの2台のスキャナでしか行えない。
・2D又は3D距離撮像にとって十分な速度は達成不能である。
【0011】
更に、電子カメラ、広域センサ素子として優勢なCCDチップ付きカメラが公知であり、長年にわたってデジタル画像撮像に使用されてきている。これらのカメラは静的記録(「静画像」)並びに連続的記録(「動画像」)のいずれをも高品質、高分解能、十分な速度で供給することができ、それ故極めて多彩な製品とその普及を達成した。
【0012】
こうして、強力な光パルスが送信されて、反射信号が個々の画素センサに取り込まれ、この取込みが適切な時点に中断されるため、各々の画素センサに距離に応じた電荷量が蓄積されるようにして、各々の画素の距離測定用に改良CCDチップが使用される距離撮像カメラが存在している。これらのセンサでは非常に大きな電力と加算平均労力にもかかわらず非常に小さな範囲しか達成されないために、これらは、方位分解能を別として、あらゆる要求の点から見て貧弱な妥協の産物である。
【0013】
画素ごとの色及び輝度からなる純然たる画像情報に加えて、距離及び信号電力の情報を得ることが多くの場合に望ましい。画素ごとの距離及び電力の情報を含むこうした「画像」は以下、距離像と称される。本発明によりそのための改良された装置が明らかにされるセンサタイプは、特に連続デジタル2D及び3D距離撮像用の装置を含んでいる。以下において、2D距離像は「距離プロファイル」とも称される。
【0014】
距離像の情報は当然のことながら数の配列からなっている。角度が別個に示される必要がないように、配列中の値の位置は極座標系ないし球座標系における距離画素の角度を表している。更に、距離像の分解能と合成方式が既知でなければならない。距離像は、例えば距離と色との対応化等の戦略によってしか人にとって可視化することはできない。但し、立体的に撮像された1又は2画像からデジタル値としての距離情報を得るにはかなり多くの労力が必要であり、像化される目標物からの距離が増すにつれて精度は悪化する。幾何的距離値を処理するどんな制御、オートメーション装置或いは測定システムもデジタル値としての距離を必要とするために、距離撮像のための装置のニーズが存在する。
【0015】
距離撮像の場合、本発明によれば、特に、反射目標物に達して戻ってくるまでの飛行時間が測定される短いパルス電磁波による距離測定に限定される。既述したように、この方法は「パルスTOF測定」と称される。この技術は、それにより、広い作動範囲で、距離に応じたエラーを低下させて速やかに距離測定が行えるという利点を有する。
【0016】
現在入手可能な単純なセンサは鏡スキャナを利用して2Dセンサに拡大され、或いは互いに直交配置された2台の鏡スキャナを利用して3Dセンサに拡大されて、これらを用いて一般に2D又は3D距離像を得ることができた。既存のセンサによれば、測定速度は一般に、使用されるレーザモジュールの最大パルス繰返し周波数によって限界される。更に、秒あたりの総偏向回数は距離像の行、列の数と繰返し周波数の積に等しいことから、鏡スキャナに生ずる機械ひずみは非常に高い。前記の積は一般に、使用される送信器の平均繰返し周波数をかなり上回っているため、既存のセンサは上述した理由だけからしても距離像の撮像には不適である。
【0017】
現在知られているパルスTOFセンサの問題は、今日既存のあらゆるセンサないし測定システムに下記並びに既述した短所の1又は複数が存在することである。即ち、
・2D、3D距離撮像に十分な速度を達成することができず、せいぜい非常に緩慢な動作でしか撮像が行えない。
・鏡スキャナは高い機械ひずみに曝される。
・外部使用への適性は非常に制限されている。
【0018】
更に、距離像生成のために、
・光学軸がベース間隔を有する2台のカメラを用い、対応関係によって画素の距離を求めることのできる立体カメラシステムが存在する。これらのシステムは膨大な計算と、距離と共にエラーが大幅に増大するという欠陥があることから、非常に限定された使用分野にしか適していないように思われる。
・レーザ線が目標物上で走査させられて、CCDカメラによって測定される三角測量システムが存在する。距離プロファイルは線の変位から計算することができる。これらのシステムは範囲が小さく、距離と共に測定エラーが増大する。
・例えば空中の航空機が航空交通管制又は追跡を目的として測定され、或いは海上において船舶が位置追跡を目的として測定されるレーダシステムが存在する。但し、これらのシステムも、使用されるレーダ波周波数が低く、これが低い方位分解能の原因となり、更に信号の飛行時間が長いために、その使用はこれらのケースにのみ限定され、実際それ以上の応用は生じなかった。
【0019】
従って、現在の距離像生成技術水準は不十分であると位置付けることができる。
【0020】
これに関連して、従来の技術につき、距離測定の方法及び装置に関する欧州特許出願EP 1 522 870(以下、KEMと称する)を参照されたい。本発明はKEMに記載された方式を少なくとも部分的に使用する。繰返しを避けるため、ここで、KEM方式に関するEP 1 522 870の開示内容を引証することとし、本引証によりEP 1 522 870の開示内容は本出願に含まれる。
【特許文献1】EP 1 522 870
【発明の開示】
【発明が解決しようとする課題】
【0021】
本発明の目的は、従来の技術による目下の撮像用パルスTOFセンサの前記短所を克服する可能性を示すことである。特に、感度の顕著な上昇を達成するための労力の資材・時間面での合理化、2D及び3D距離撮像の測定速度向上、各々の距離画素におけるパルスTOFセンサの性能ケイパビリティの実現、範囲の増大及び、距離に左右されないエラーの回避が達成されなければならない。
【課題を解決するための手段】
【0022】
前記目的は独立した方法請求項1記載の特徴及び独立した装置請求項34記載の特徴によって達成される。
【0023】
本発明の好ましい実施形態は従属請求項に述べられており、その内容は本引証により本願説明に含まれる。
【0024】
本発明は一般にかつ特に好ましい実施態様において、就中、下記機能を可能にする。
・適切な時間測定回路、並列配置された複数の時間測定チャネルにおける複数のレーザのスタートパルス及び複数の受信器の信号及びノイズパルスの並列処理により、測定速度を著しく高めること。
・適切な時間測定回路、送信アレイ及び受信アレイにより、並列時間測定チャネルにおける並列/逐次時間測定による、可動部品(鏡スキャナ)なしでの2D距離撮像を行うこと。
・適切な時間測定回路、送信アレイ及び受信アレイにより、並列時間測定チャネルにおける並列/逐次時間測定による、単一の鏡スキャナでの3D距離撮像を行うこと。
・総じて、2D及び3D距離撮像における十分な速度及び感度を達成すること。
・適切な時間測定回路により、各々の時間測定チャネルにおいて、TOFの間に生ずる例えばスタートパルス、エコー及びノイズパルス等の多数のパルスの測定を行うこと。ノイズパルスは受信増幅器の後に接続された比較器(4)の比較閾値(5)が低く選択されると不可避的に発生し、また、測定値の適切な加算平均により4.5NEPを大幅に下回る感度を達成するために測定されなければならない。
・例えば、雨、雪、霧及び汚れた境界板による反射も多数の目標物からの反射もいずれも各々の時間測定チャネルにおいて評価し得るようにするため、つまり、不良な気象条件下での外部測定を可能にし、或いはまたこれらの問題を計測によって検出するために、TOFの間に多数のエコーパルスの処理を行うこと。
・範囲を向上させるため、(ノイズパルスが存在する場合)同時的な感度上昇により多数のエコーパルスを測定すること、つまり、多数の時間測定チャネルにおいて同時に多数のエコーパルスと多数のノイズパルスを測定すること。
・時間測定チャネル・アレイにおける多数の信号の並列処理により鏡スキャナの機械負荷を低減させること。
・偏向ユニット及び移動キャリアとの組み合わせにより、周囲環境の大量の距離撮像を行なうこと。
【0025】
パルスTOF法で作動するセンサの前記性能ケイパビリティは本発明によりあらゆる距離像点で実現される。前記パルスTOF法の利点は距離撮像には不適な多数の単純なセンサですでに具体的に例示されてきた。
【0026】
画素ごとの光が電荷に変換され、該電荷は時間期間全体にわたって集積され、次いで逐次に読み出される、つまり、使用される光は事前に生成される必要はなく、技術的には1パス(受信)が供されるだけでよい例えば2台のCCDカメラによる立体撮像に比較した場合、前記パルスTOF法による距離撮像の本質的な難題は、この場合、最初に電磁有向ビーム又は部分ビームが距離画素ごとに生成され、次いで、その画素ごとのTOFが測定されなければならないこと、つまり、技術的観点からは2パスが供されなければならない点にある。従って、画素ごとの労力は基本的に遥かに高い。但し、前記パルスTOF法の重要な利点が存在する。
【0027】
前記パルスの前記TOFはCCDカメラによる前記集積時間に比較して基本的に短く、これは基本的に短い測定時間に対応する。前記集積時間はまた、強力な光パルスが送信され、単一パルスの前記集積時間が前記TOFの範囲内にあるCCD距離カメラによる複数の繰返し測定のために、拡大されなければならない。複数の距離像点を並列撮像するための距離測定チャネル・アレイの好適な多重活用により、前記パルスTOF法による短い測定時間は、各々の距離画素に距離測定チャネルは供されないが、このアレイが多数の距離画素グループのために何度も逐次的に使用され、前記距離画素グループから距離像が集成されるようにして、使用することができる。このアプローチは、限定されたアレイと多重使用のための手段とがなお可用化されなければならないために、CCDチップよりもなおコスト高であるが、前記パルスTOF法による距離測定チャネルの前記性能ケイパビリティがその利点と共に各々の距離測定点で得られることになる。前記パルスTOFセンサの性能特徴を有する距離測定チャネル・アレイと距離撮像のための多重使用手段とは本発明により可能とされ、これにより、以下にもっと詳細に述べる新たな用途が経済的な技術態様で実現可能になる。
【0028】
パルスTOF測定チャネルの感度はすでに上述した公知のKEM方式で著しく高めることができると同時に、更に、上述した演算労力が回避される。本発明は、時間測定チャネルを含む高度集積時間測定ICにより、多数の並列/逐次信号入力の存在時の大量の並列処理によって一般に前記測定速度を著しく高めることのできる装置を可能にする。ここで、距離撮像を高速、正確、広範囲かつ高い方位/距離分解能で行うことができると共に外部使用に適した装置を得るために、適切な送信/受信アレイ及びそれらの組み合わせによってどれだけの信号が形成されなければならないか、送信/受信アレイは多数の時間測定チャネルを含む時間測定IC、偏向ユニット及びキャリアとどのように組み合わせることができるかについて述べることとする。
【0029】
本発明により、特に、
・多数の並列信号を当該スタートパルスと共に供給するアレイ配置された適切かつ効率的な送信器及び受信器と、
・多数の調整可能な測定モードで測定評価を行う多くの時間測定チャネルを含む革新的な時間測定回路
との組み合わせが実現される。
【0030】
前記総時間測定回路は好ましくは、例えばCMOSによる集積されたICとして製造される。こうして、2D距離像は鏡スキャナなしで撮像可能であり、3D距離像は適切な単一の鏡スキャナで撮像可能である。使用される前記時間測定法は前記のKEM方式をベースとすることができる。本発明により、革新的な回路、モジュール及び要素配置そして、本発明の対象でもあるモジュールによって、この公知の時間測定法を実現することが可能である。
【0031】
以下、本発明の考えられ得る態様を説明する。
【0032】
本発明による前記時間測定ICにより以下を実現することができる。つまり、多数の時間測定チャネルにおいて、多数のパルスの前記それぞれのTOFが、同じスタートパルス又は異なるスタートパルス及び当該信号と共に、互いに独立に並列測定される。処理されるべき信号は、前記アナログ信号(6)が前もって比較器(4)を経て誘導されるか又は前記時間測定ICの入力バッファにより論理信号に変換(デジタル化)されることによって生ずる減衰アナログ信号又は減衰デジタル信号である。各々のスタートパルスは1線上で当該信号パルスと組み合わされてパルスチェーンを形成し、前記スタートパルス周囲のノイズは抑制される。処理されるべき1パルスチェーンは時間測定チャネルごとに結果する。このパルスチェーンの全てのパルスのアップ事象(パルススタート)及びダウン事象(パルスエンド)が前記最初のスタートパルス(第1パルス)直前の時点から出発して測定される。処理されるべきパルスはスタートパルスかエコー又はノイズパルスであってよい。こうして、パルスチェーンの情報は各々のパルスの2事象(アップ及びダウン事象)に還元される。処理されるべき情報の範囲は、既存のパルスTOFセンサによる情報の範囲に比較して、処理されるべき前記パルスの数に比例して高まるが、前記GHzレベルのサンプリングレートでアナログ/デジタル変換されたパルスチェーンを使用するセンサよりも遥かに小さい。
【0033】
時間測定は一般に2部分測定によって行われる。
1.測定スタートから各々の事象まで、時間尺度として外部から供給される正確な測定クロック信号の正又は負のフランクのカウント。
2.発生する部分期間(TP)のパルス幅の測定。
【0034】
前記スタートパルス直前に設定された前記スタート時点から、前記パルスチェーンの全てのパルスの全ての事象の後に到来する前記測定クロックの最初の正のフランクまでの測定クロックの正又は負のフランクの数が前記第1の部分測定でカウントされる。前記測定クロック・フランクのためのカウンタの幅は前記TOFが明白にカウントできるように選択される。但し、もし前記カウンタの幅が例えば8ビットに制限されれば、255フランクまでしか明白にカウントできないため、当該メモリ領域においてカウンタのオーバフローをマーク付けすることにより、より長い時間範囲にわたって明白性が確立される。こうして、ほぼ任意の所望の長さの測定範囲を実現することができる。
【0035】
前記パルスチェーンの各々のパルスの前記スタート時に過大にカウントされたTPパルスの前記パルス幅とエンド時に過大にカウントされたTPパルスのパルス幅は、前記第2の部分測定を使用して計測によって検出される。
【0036】
従って、前記アップ事象の部分期間の前記パルス幅と前記ダウン事象の前記パルス幅も常に差し引かれなければならない。前記パルスチェーンの前記パルスは前記測定クロック信号とは非同期であるため、前記TPは任意のパルス幅を有し、前記測定クロックの期間は上限である。前記TPは、例えばTDCにより、前記TDCの遅延素子の遅延時間の倍数としてのデジタル値に変換される。これにより、前記第1の部分測定の前記時間測定の分解能は、遅延時間例えば50psへの前記第2の部分測定の加算によって、10〜20GHzの仮想測定クロックに対応する100psに増分される。前記遅延時間の数によって除された前記測定クロックの期間は、好ましくは、僅かな温度依存性のために、前記プロセッサシステムにおいて前記測定間に絶えず再キャリブレーションされる遅延時間を与える。
【0037】
再トリガ可能な又は連続的測定を行う回路部品は、比較器閾値が低く選択された場合に多数のパルス(スタートパルス、エコーパルス及びノイズパルス)を処理する双方の部分測定のための各々の時間測定チャネルに設けられる。全ての事象はそれぞれ、前記2測定後に2測定値として存在している。前記第1のスタートパルスに関係する全てのパルスのTOFはパルスチェーンの全てのパルスの各々の事象から前記スタートパルス・アップ事象を差し引くことによって与えられる。ノイズが発生せずに、エコーパルスのみが生ずる場合(基準(5)>4.5NEPによる特別なケース)には、前記測定結果は一般に、多数の時間測定チャネルの本発明による並列処理と前記マルチエコー評価とを無視すれば、上述した現在使用可能な前記パルスTOFセンサで達成される前記結果と同じである。
【0038】
本発明の態様において、電子回路の処理速度並びに回路規模が有限であるために、但しまた特別なケースにおける一般的な理由からしても考慮されなければならない幾つかの一般的な対策を講ずることができる。
【0039】
測定されるべき前記パルスが前記測定クロック(中央クロック)の期間よりも短ければ、前記アップ事象とダウン事象の前記TPパルスが時間的にオーバラップすることがある。双方のパルスを測定し得るようにするため、時間測定チャネルごとに、一般に、前記アップ事象とダウン事象のために2TDCが存在し、前記測定クロック・フランクのカウントのために2カウンタが存在する。これにより、前記時間測定チャネルは一般に、前記アップ事象を処理するためのブランチと前記ダウン事象を処理するためのブランチに分割され、これらの前記2ブランチは同じ構造を有する。
【0040】
更に、前記TDCはそれぞれ、少なくとも1事象の前記時間測定結果が保全されるまで、ブロックされる。ノイズパルス又はエコーパルスも、前記比較器閾値の位置が低ければ、互いに時間的に密に続くことがあり、これは前記事象測定にとっての特別な難題を表している。TPパルスは、それが処理される前に、少なくとも測定クロック期間(+更なるゲート処理時間)の間前記TDC内にあり、従って、爾後のパルスのための入力はブロックされなければならないことから、密な配列の前記ノイズ又はエコーパルスにつき、パルスチェーンの前記パルスを「パルススイッチ」として公知の回路部品によって複数のチャネルに交互に向けることが必要であり、これにより、パルスの処理可能平均配列頻度はチャネルの数に比例して増大する。こうした背景に鑑み、高密度のパルスが前記パルスチェーン中に存在することはいかなる用途においても想定されないため、種々相違した測定モードを導入することができる。
【0041】
従って、本発明の考えられ得る1実施形態において、パルスチェーンは1パルススイッチで、並列配置された1つ又は2つ又は4個の時間測定チャネルに対応する測定モードで制御されることが行われる。このため、A、B、C及びDと命名された4測定チャネルが設けられて、これらの4測定チャネルが組み合わされて、「サブアレイ要素」(31)(図8及び9も参照のこと)と称される前記時間測定ICにおいて1グループとされる。パルスチェーンの処理可能パルスの間隔はこの処置により2分の1又は4分の1に減少させることができる(特別な実施形態において、例えばほぼ3nsに低下)。4個の時間測定チャネルで、総計8TDCと8カウンタが存在する。
【0042】
前記測定クロックは、前記センサでの前記距離測定にとって信頼し得る正確な目盛を有する十分な温度安定性を具えた要素として選択される。前記遅延時間は温度依存的であることから、前記TDC内に存在する遅延時間の前記測定クロックの期間は遅延素子によってキャリブレーションされる。こうして、前記遅延時間の数によって除された測定クロックの期間は前記遅延時間となる。このキャリブレーションは、不断に生成する部分測定値にアクセスして、それらを適切に評価する前記装置のマイクロプロセッサシステムの前記評価プログラムのパートプログラムで完全に行うことができる。
【0043】
更に、1又は複数のパルスチェーンのデータが記憶され、同所か前記データが測定後に前記マイクロプロセッサシステムに転送される別個のメモリ領域(26)が特に全ての時間測定チャネルのために設けられる(図8も参照のこと)。このメモリ領域は好ましくは線で編成され、前記メモリ中の1本の線はパルスチェーンの各々のパルスに対応している。1測定の前記線の情報内容は事象リストと称される。前記線の数は、比較器基準0V時の最大値として所要の、前記TOF中のパルスチェーンのパルスの数に依拠しており(この基準はノイズの平均値に等しく、これは最大感度上昇に対応し)、150MHzの受信器の帯域幅で平均してほぼ0.02パルス/nsが生じ、つまり、ノイズパルスの平均周波数はほぼ50MHzに達する。これにとって十分と思われる選択は時間測定チャネル当たり128本の線である。従って、パルスチェーンのパルスが4個の時間測定チャネルに逐次に分配される測定モードにおいて、総計512本の線が使用可能である。上述した50MHzの平均ノイズパルス密度で、512本の線はほぼ10マイクロ秒のTOFに対応すると考えられ、これは1.5kmの目標物距離に対応する。この作動範囲は、単一の時間測定チャネルしか使用しない場合には、なお375mに低下するであろう。
【0044】
本発明の考えられ得る更に別の1実施形態において、n×4並列時間測定チャネルをnサブアレイ要素(31)として前記時間測定IC(32)に組み込むことができる。前記サブアレイ要素のこれらの4チャネルはまた、選択可能な測定モードによって制御される当該測定モードで、独立した4又は2又は1測定を互いに独立に処理することもできる。前記測定モードは外部制御信号によって起動される。各々のチャネルは独立した信号入力を有し、独立した測定を実施することもできる。前記測定モードは1チャネルモード、2チャネルモード及び4チャネルモードと称され、当該2チャネル及び当該4チャネルモードは直列処理と並列処理の双方に適している。前記直列処理は高い時間ノイズパルス密度又は長い測定時間によって選択され、他方、前記並列処理は低い時間ノイズパルス密度及び短い測定時間によって選択される。更に別の測定モードにおいて、分解能の向上を複数の前記時間測定チャネルにおいて同じ入力信号で、時間測定チャネルにおいて90°及び/又は180°位相変位された測定クロック信号が使用され、前記チャネルの結果が続いて加算平均されるようにして、達成することができる。
【0045】
前記送信/受信アレイの使用によって前もって大幅に加速された距離撮像により、これらの可能性は、(i)繰返し測定又は区別可能な距離画素のための並列時間測定チャネルの使用によって、前記距離測定の精度又は感度を高め、及び/又は、(ii)画素のパルスチェーンの前記パルスを逐次に供給(分配)する並列時間測定チャネルの使用により、あらゆる画素においてほぼ任意の所望の数のエコーで、前記検出可能な多重エコーパルス密度をほぼ50cmの最小パルス間隔まで高める。両者はまた速度向上の一部を減殺するが、上述した計測上の改善をもたらす。
【0046】
上述した特徴を有する本発明による前記時間測定ICの考えられ得る前記態様は複数の単一測定が1単一測定(以下、「バースト測定」とも称される)として処理されることを可能にし、これにより、更なる速度向上が達成される。これに関連して、前記時間測定ICの前記メモリ領域でマーク付けによってそれぞれマーク付けされた複数のスタートパルスが生ずる。こうして、前記時間測定チャネルのメモリ中の前記情報と個別測定との対応付けが前記スタートパルス・マーク付けによって保証され、前記バースト測定の個別測定値は容易かつ速やかに加算平均されて、例えば感度の向上が達成される。前記バースト測定内の個別測定は一般に非常に高速で順次に実施されることから、前記バースト測定は、多数の信号グループがマルチプレクサで逐次に前記時間測定ICに切り換えられる、前記時間測定ICによる感度向上に特に好適であり、或いは、前記距離プロファイル撮像のための送信/視覚空間角は確かに連続的に偏向されるが、バースト測定のごく短い時間からすれば前記平均的な個別測定にとっては遊んでいるも同然であるとは決していうことのできない偏向ユニットを装備した装置にとって特に好適である。
【0047】
全ての時間測定チャネルの事象リストは、例えば32ビット幅のインタフェースを経て、前記プロセッサシステムの前記個別測定間又は前記バースト測定間の中断時間に読み出されることができる。前記異なる測定モードに従った前記事象リストの順序付け及びバースト測定内の個別測定の整列は後置された前記プロセッサシステム(28)で行われる。
【0048】
既述したように、本発明は現在に至るまで実現不能であった用途を可能にする。距離撮像のための装置の用途は極めて広く、この上なく多様な需要を含んでいる。本発明により、連続距離撮像のための十分に高速、正確、高感度かつ堅牢な装置が可用化され、これにより、相当な市場を有する多数の応用分野にまたがる用途が切り開かれる。以下のリストは考えられ得る応用例を概観したものである。
・例えば、監視、物体測定、及び、例えば自動車駐車場、航空機離着陸場、コンテナターミナルの保管エリア、鉄道線路、屋内及び屋外の集合場所、エレベータ、ケーブルカー及びそれらのためのロビー、自動ドア/ゲートのドア開閉、建築現場及び事故現場などの専用監視のための定点からの静距離撮像。
・アプローチゾーン及び直近運動ゾーンにおける障害物の警戒、人の視覚に代わる又は補完する自律車両誘導、例えばクレーンによる荷役、ナビゲーションシステムのための目標物の高速測定、路面測定、航空機及び車両からの地形測定及び都市計測、動距離像として評価するための作業プラントの作業域撮像等における、例えば物体検出、測定及び3D表面測定のための、乗用車、トラック、クレーン、鉄道、ヘリコプタ及び航空機からの動距離撮像。
・航空機離着陸場、コンテナターミナル、船舶及び航空機のドッキング、競技場、安全ゾーン、安全監視ゾーン例えば施錠ゾーン、横断ゾーン、鉄道踏み切り及びエスカレータにおける動距離撮像による運動監視。
・交通モニタリング、車両、並びに、人及び動物などにおける動距離撮像による物体計数。
・トンネル、鉱山及び鉱山坑道における動距離撮像による露出側面の監視。
・開いた地形、都市及び道路等の形態が静/動距離撮像によって検出される測地測量。
【0049】
これらの用途において、本発明によって実現可能な前記距離像により、目下達成不能な利点を生み出すことができる。前記例示による列挙は、重要な用途は戸外分野にあり、従って、動距離プロファイル又は動距離像を必要とすることを示している。こうした理由から、距離撮像のために設けられる前記センサは自然環境に対する耐性を有し、不都合な気象・汚濁条件下でも信頼度の高い測定値を供すると共に、十分な動特性を有していなければならない。本発明によって実現することができるのはまさにこのことである。
【発明を実施するための最良の形態】
【0050】
以下、図面を参照しつつ、実施例によって本発明を説明する。
【0051】
以下の図(1)〜(6)には、パルスTOF測定を使用した距離撮像装置のための送信/受信アレイの実施形態が示されている。短レーザパルスがパルス電磁波として使用され、送信素子(10)例えば半導体レーザダイオードと受信素子(2)例えばAPD(アバランシェフォトダイオード)が設けられている。これはおそらく実際に最も普及している実施形態であることから、一般に本発明の1実施例としてのみ理解されるべきこの実施態様は本発明の更にその他の実施形態の更なる説明にも使用される。
【0052】
図1は、目標物から反射され、電磁波集束系(48)(図12a、21〜23参照)としての受信レンズを経て受信された光パルス(1)を電気信号に変換するAPD(2)と、それに続く広帯域増幅器(3)と、調整可能な基準(5)との比較器(4)と、デジタル化された出力信号(7)とを含む受信器の基本構造を示している。
【0053】
受信器の要素は集成されて、図2において、受信モジュール(8)を形成している。モジュール(8)はデジタル化された出力信号(7)と基準(5)とを有する。
【0054】
図3において、図2に示した受信モジュール(8)は集成されて受信アレイ(9)を形成し、時間測定チャネルのための入力信号(7)を供給する。1レーザ(10)からの1レーザビーム(14)しか存在しなければ、反射された光パルス(1)の部分光線が受信アレイ(9)によって検出される。複数のレーザ(10)が多くのレーザビームを送信する場合には、受信アレイ(9)の部分アレイがそれぞれ1レーザのビームを検出する。受信アレイ(9)の全てのアレイ要素は各々の比較器(4)のための基準入力を有する。
【0055】
図4は、光レーザパルス(14)を発生させるレーザダイオード(10)によるパルスレーザの基本構造を示している。電流パルサ(11)はダイオード(10)の動作のために設けられており、これにより、レーザダイオードの光パルス発生のための電流パルスが生み出される。電流パルスは信号(12)によってトリガされ、更に、センサとしての小コイルにより例えば非接触式にスタートパルス(13)に変換される。
【0056】
図5において、レーザの要素は集成されてレーザモジュール(15)を形成し、トリガ信号(12)及びスタート信号(13)と共に示されている。
【0057】
図6において、図(5)のレーザモジュール(15)は集成されてレーザアレイ(16a)を形成し、全ての光レーザパルス(14)を、反射されたレーザパルスが受信アレイ(9)の視角空間角内で検出される送信空間角アレイとして供給する。全てのレーザは回線(12)を経てそれぞれトリガされることができ、レーザごとに1スタートパルス(13)が供給される。
【0058】
受信アレイ(9)と、レーザアレイ(16)と、ここには図示しない当該光学系との配置によって、スタートパルスと信号が発生させられ、それからパルスチェーンが生成されて、パルスTOF測定による高速距離撮像のための本発明による時間測定器を表す時間測定ICによって処理される。
【0059】
これに関連して、異なる実施形態において、レーザビームが受信アレイ(9)の一群の受信器によって検出されるときに、対応する信号パルス(7)と並列処理されるべき2スタートパルス(13)が生ずることがあり、かくて、これらは全て並列された時間測定チャネルで処理され、レーザビーム(1)が並列配置された受信アレイ(9)の受信器(8)のグループによって逐次に検出されるときに、対応する信号パルスと直列処理されるべきスタートパルスが生じることがあり、かくて、これらはマルチプレクサ(18、19)(図7、8参照)により同一セットの時間測定チャネルに供給されるか又は−十分な時間測定チャネルが存在すれば−全て並列処理されることが可能である。グループ内の有利な受信器数はサブアレイの測定チャネル数とまったく同じである。
【0060】
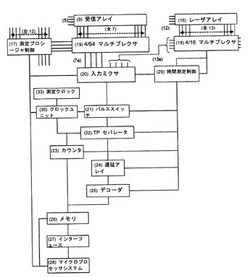
この時間測定ICのサブアレイ要素が最低限含んでいる基本装備された回路部品は図(7)に示されている。回路部品の基本タスクは下記リストに示した通りである。
【0061】
(20)入力ミクサ
入力ミクサのジョブは以下の通りである。
・集積された時間測定ICとして構成されていてよい時間測定回路への入力信号(スタートパルス及び信号)の制御及び誘導。
・スタートパルスと対応する信号とを加算してパルスチェーンを形成すること。
・信号及びノイズの近接場抑制のための、測定スタートから出発してスタートパルスエンド後までの設定可能時間における、エコー及びノイズパルスからのスタートパルスの解放。
・所望のTOF後の入力ブロック。
【0062】
(21)パルススイッチ
パルススイッチのジョブは以下の通りである。
・並列又は直列による1又は複数の時間測定チャネルへのパルスチェーンのパルスの分配。
・複数の時間測定チャネルへの同一又は異なる位相の測定クロック信号の分配。
【0063】
(30)クロックユニット(中央クロック)
クロックユニットのジョブは以下の通りである。
・時間測定チャネルのための外部精密クロックからの測定クロック信号の準備。
・全ての時間測定チャネルに応じた位相の異なる測定クロック信号の発生。
・使用されないか又は中断時間中の時間測定チャネルにおける、制御入力による電力消費の低減。
【0064】
(22)TPセパレータ
TPセパレータのジョブは全ての時間測定チャネルにおいてTPパルスを発生させることである(TP=部分期間)。
【0065】
(24)遅延アレイ
遅延アレイのジョブは遅延時間に各々の時間測定チャネルのパルスチェーンの各々のパルスの異なる2TPパルスを測定することである。
【0066】
(25)デコーダ
デコーダのジョブは遅延アレイの2出力情報を2進コード化情報に具体化することである。この情報は、情報「スタートパルス」が加えられるラッチアレイの時間測定チャネルごとに用意される。
【0067】
(23)カウンタ
カウンタのジョブは、測定クロックの期間の分解能で全ての事象を測定し、オーバフローをラッチアレイに取り込むことである。チャネルごとに2カウンタが存在する。
【0068】
(17)測定プロシージャ制御
測定プロシージャ制御のジョブは測定の枠組みを制御することである。これは以下を含んでいる。
1.個別測定の制御。
2.バースト測定の制御。
3.レーザモジュールの動作開始。
4.スキャナ角度信号(もしあれば)の処理。
5.受信信号及びスタートパルスのためのマルチプレクサ(もしあれば)の制御。
6.節電制御、しかも
実際に外部静的制御信号を使用する間の節電制御、つまり
1.測定モード選択信号の制御。
2.近接場ミューティングの制御。
3.測定終了制御(所望のTOFへの制限)。
【0069】
(29)時間測定制御
時間測定制御のジョブは、選択された測定モードの結果としての静印加制御信号及び動的に変化するリセット信号に従って時間測定チャネルにおける時間測定を制御することである。時間測定制御により以下のプロセスが制御される。
4.TPパルスの発生。
5.TPパルス幅のデジタル化及び記憶のための可用化。
6.カウント値の発生及び記憶のための可用化。
7.2進変換されたTP及び部分測定値としてのカウント値の記憶。
8.測定モードに応じた、部分測定値からのパルスチェーンのパルスごとのメモリ線の形成(「事象リスト」と称される)。
9.スタートパルスのマーク付け。
10.オーバフローのマーク付け。
11.記憶の制御。
【0070】
(26)メモリ
オーバフロー及びスタートパルスのマーク付けを含む、全ての事象の全ての部分結果はメモリに記憶される。
【0071】
(27)インタフェース
インタフェースのジョブは、プロセッサシステムによって制御されたメモリ中の情報を外部に転送することである。
【0072】
図7の基本ブロック図は、上述したジョブを遂行する、信号(7)、(13)によって示したように4個の時間測定チャネル(その他の任意の数の時間測定チャネルも同じく可能である)を有する、本発明によるサブアレイ要素の、考えられ得る1個の時間測定ICを示したものである。
【0073】
以下、時間測定器の回路部の機能を説明する。
【0074】
入力信号は全てのスタートパルス(13)及び全てのデジタル化信号(7)である。グループ受信器及び当該スタートパルスの選択は、マルチプレクサ(18)、(19)に作用する測定プロシージャ制御(17)の制御回線によって行われる。レーザは全てのトリガ回線(12)によって逐次に起動される。マルチプレクサ(18)は通し連結されたスタートパルス(13)を、マルチプレクサ(19)は通し連結された当該信号(7)をそれぞれ入力ミクサ(20)に供給する。信号(7)はスタートパルス後の時点まで時間的に抑制されて、スタートパルスが時間的に正しくこのギャップに加えられ、こうして、既述したスタートパルス及びエコーパルス、ノイズパルスのパルスチェーンが生ずる。これにより、時間測定結果の品質を作為的に低下させると考えられるノイズパルスによるスタートパルスのひずみが確実に回避される。近接場抑制信号は測定プロシージャ制御(17)から供給される。
【0075】
入力ミクサ(20)の出力信号はパルススイッチ(21)に供給され、同所において、測定されるべき通し連結されたパルスチェーンは入力ミクサ(20)を通過した後、並列又は直列に2−又は4個の時間測定チャネルに分配される。
【0076】
パルススイッチ(21)の出力信号はTPセパレータ(22)に供給され、同所において、時間測定回路の全てのブランチのためのパルスとして部分期間が導出される。TPパルスは、使用される測定クロック信号のそれぞれ後続の正のフランクまでのパルスの正及び負のフランクで形成される。従って、各々の時間測定チャネルのために2TPセパレータが存在する。これに関連して、すでにパルススイッチ(21)を通過したパルスが使用される。
【0077】
部分期間TPは以下、特に、図9に関連して再び詳しく述べられる。
【0078】
TPセパレータ(22)のTPパルスは遅延アレイ(24)に供給されて、同所で、遅延素子の遅延時間の倍数として測定される。各々の時間測定チャネルのために2遅延アレイが設けられ、実際に、正のパルスフランクのために1遅延アレイが、負のパルスフランクのために1遅延アレイが設けられている。TPパルスは遅延アレイ(24)に入り込む前に回路技法により拡張(オフセット)されるため、ゼロとは異なる値をもつ非常に短いTPパルスも測定可能である。
【0079】
TPパルスは遅延アレイの遅延素子によって遅延させられ、互いに比較されて、遅延パルスがなお出力パルスとオーバラップしているか否かの情報がラッチに記憶される。情報の保全は例えば80素子を有するラッチアレイで行われる。2TPパルスに対応して、チャネルごとに2遅延アレイが設けられている。これにより、時間測定の分解能は遅延時間へ高められる。測定値は、静止状態とは異なる論理値により、80本の線で示される。最大遅延数は遅延時間に変換された測定クロックの期間+オフセットに一致している。
【0080】
遅延時間のTPパルス幅はデコーダ(25)で2進数に変換され、ラッチアレイにおいてチャネルごとに可用化される。スタートパルスであるとの情報は更に同様にラッチに記憶される。
【0081】
4位相角0°、90°、180°及び270°の4測定クロック信号がクロックユニット(30)で発生させられる。
【0082】
全ての事象はカウンタ(23)において、当該パルスフランクに続く測定クロックの正のフランクでカウントが読み出され、カウンタのオーバフローが同様にして検出されるようにして、測定クロックの期間の分解能で測定される。時間測定チャネルごとに2カウンタが存在している。
【0083】
一方でカウント、他方でTPパルス幅の2進値を含む全ての事象の部分結果並びにオプショナルに存在するオーバフロー・マーク付け及びスタートパルス・マーク付けも同様に各々の時間測定チャネルのメモリ(26)に記憶される。部分結果が発生させられて、正しい時間にラッチへの記憶のために可用化され、メモリに記憶され、次いで、測定されるべき機能ブロックが次の測定のために切換解除されることが時間測定制御(29)によって保証される。
【0084】
測定の終了後、メモリ内容はマイクロプロセッサシステム(28)によって制御されるインタフェース(27)を介して読み出され、評価ソフトウェアを使用して処理されて距離に変えられる。
【0085】
回路部品である、入力ミクサ(20)、パルススイッチ(21)、TPセパレータ(22)、遅延アレイ(24)、デコーダ(25)、カウンタ(23)、インタフェース(27)及び時間測定制御(29)は好ましくは時間測定ICへの統合に好適である。時間測定ICへの統合にあまり適していないかもしくは不適なのは、レーザアレイ及び受信アレイ(9、16)、測定クロック(33)及び、マルチプレクサ(18、19)を含む測定プロシージャ制御(17)であるが、それはこれらの機能ブロックが適応に関連した変化を受けやすく或いは技術的に不均一だからである。
【0086】
図8aは図7と同じ態様の1実施例を示しており、この態様において、時間測定回路は集積された時間測定ICとしての4個の時間測定チャネルを含むサブアレイ要素(31)として構成されている。レーザアレイ(16)のレーザモジュールは測定プロシージャ制御を使用して全トリガ回線(12)を経て直列制御される。所望の最大TOFは後続するレーザモジュールの各々のトリガの前に待機されなければならない。受信器(7)の出力数は4の倍数として選択されるため、マルチプレクサ(19)でその出力(7a)は逐次に時間測定IC(32)に向けて切換えられることができる。各々のレーザビームは受信アレイ(9)の4受信器(8)によって検出される。当該スタートパルスは、切換えられた受信器又はマルチプレクサ出力(7a)に同期して、マルチプレクサ(18)によりスタートパルス(13)としてサブアレイ(31)に向けて切換えられる。
【0087】
図8bは、時間測定回路が、集積された時間測定IC(32)の形の、それぞれ図(8a)と同じ4個の時間測定チャネルを有したサブアレイ要素(31)のアレイとして構成されている1実施例を示したものである。この実施形態において、レーザアレイ(16)の全てのレーザモジュール(10)は並列にトリガされ、受信アレイ(9)の全ての受信モジュール(8)のためにそれぞれ1測定チャネルが存在しているために、測定速度は最適化される。2D距離像(プロファイル)は、鏡スキャナなしで、図(8a)及び図(8b)に示した態様の装置を用いて撮像することができる。この装置構成は単一の鏡スキャナによって3D画像撮像装置に拡大することができる。
【0088】
図8cは特に、既述したKEM方式の原理並びに上述した部分期間(TP)の説明に資するものである。
【0089】
スタートパルス(73)及びアナログエコー信号(75)は処理されるべき信号に属し、アナログエコー信号は(6)(図1参照)で示した受信ノイズ(76)と共にアナログ受信信号(77)を形成する。アナログ受信信号(77)は基準(5)との比較器(4)によりデジタル受信パルスに変換されて、スタートパルス周囲の近接場のアナログ信号を抑制するために信号(74)でマスクされ、これによって結果信号(79)が生み出されるか又は、測定ゾーンを遠隔ゾーンに変位させるためにマスクされる。スタートパルス(73)と結果信号(79)とは時間的に正しく組み合わされてパルスチェーン(80)を形成する。結果信号(79)又はパルスチェーン(80)の正のフランク(81)は測定されるべきアップ事象であり、負のフランク(82)は測定されるべきダウン事象である(dw=down)。測定クロック信号(83)は測定のために使用される。
【0090】
アップ事象(81)に属するカウント数は測定クロックの期間の経過数であり、菱形(86)によって示されている。アップ事象の部分期間(upTP)は垂直陰影線の付されたパルス(85)である。従って、アップ事象の時点はそれぞれに対応する部分期間(85)を除いたカウント数(86)によって形成される。ダウン事象(82)に属するカウント数は測定クロックの期間の経過数であり、短矢印(89)によって示されている。ダウン事象(82)(dwTP)の部分期間は垂直陰影線の付されたパルス(88)である。従って、ダウン事象(82)の時点はそれぞれに対応する部分期間(88)を除いたカウント数(89)によって形成される。従って、パルスチェーン(80)のアップ事象(81)の時点は測定値(85)と(86)によって示され、ダウン事象(82)の時点は測定値(88)と(89)によって示される。
【0091】
TPはTDCによってデジタル化されて、遅延時間の倍数として表される。カウント数は測定クロックの期間に含まれた遅延時間の数によって増倍される。こうして、全ての値は遅延時間とカウント数の倍数として存在し、TP幅は組み合わさって1つの数を形成することができる。可能最高値は遅延時間の倍数としての最大TOFである。もし、例えばそれぞれ遅延時間が100psに、最大TOFが1000nsに達すれば、生じ得る事象の最大値は10,000に達する。時間パターンメモリの1メモリセルは1から10.000までの値のそれぞれに対応している。但し、時間パターンメモリの設計は、基準(5)がノイズ(76)の4.5NEP未満の場合に必要であるにすぎない。もしも測定クロックの期間自体が遅延時間として使用されるとすれば、粗い時間パターンメモリが生ずる。5nsの期間で、粗い時間パターンメモリは200のメモリセルしかもたない。精度及び演算労力はパルスチェーン(80)の平均時のメモリポジションの数に応じて低下し、事実、この実施例システムにおいて50分の1に低下する。
【0092】
アップTP(85)とダウンTP(88)とは、信号(84)(アップTP信号)と(87)(ダウンTP信号)の点(90)で示されているように、オーバラップすることがある。こうした理由から、1個の時間測定チャネル内に、アップ事象の測定のために1ブランチが、ダウン事象の測定のために1ブランチがそれぞれ設けられる。更に、点(91)で示されているように、パルスチェーン(80)の連続した2パルスの連続したアップないしダウンTPがオーバラップすることがある。こうした理由から、パルスが複数の時間測定チャネルに直列に分配される、いわゆる「直列測定モード」が設けられる。パルスチェーン(80)のパルスの分配はパルススイッチ(21)によって行われる。
【0093】
[プロセッサシステムのパートプログラム]
測定のプロシージャを保証するのみのプログラムパーツは説明されない。
プロセッサシステムの評価は時間測定IC(32)の各々の時間測定チャネルのメモリの事象リストからの読出しとプロセッサシステム(28)のメモリ領域への読み込みを制御し、事象リストから設定測定モードに従って距離値を計算する。
【0094】
そのため、時間測定システムのキャリブレーションが行われる。測定クロックが絶対基準とされ、そのため、エラーなしと見なされる。パートプログラムにおいて、期間はTPパルスのパルス幅の部分測定結果から遅延時間の倍数として計算され、それから絶対遅延時間が決定される。結果はどれだけの遅延時間が測定クロックの1期間に相当するかを示す係数である。
【0095】
更に別のパートプログラムにおいて、全てのカウント値は前記係数で増倍される。TPパルスの2進変換されたパルス幅は、今や、カウント値と組み合わされて、1つの数を形成することができる。これらの値は遅延時間に測定された事象である。任意に定められた測定スタートからスタートパルスまでの時間がカウントされた事象を関係付けるため、スタートパルス・アップ事象の値がパートプログラムの全ての事象から差し引かれる。こうして、全ての事象は、スタートパルス事象からカウントされて、2進数としてキャリブレーションされた目盛りで、プロセッサシステムのメモリにリストとして存在している。
【0096】
測定値を加算平均(KEM方式参照)するため、これらの値は更に別のパートプログラムにより、可能ないずれの値もメモリセルのアドレスを表すと共に、アップ事象の発生時にはメモリセルの内容に1が加えられ、ダウン事象の発生時には−1が加えられるようにして、時間パターンメモリに入力される。これにより、設定可能な限りの多数の測定値が加算可能である。内容はパルスチェーンの加算の一次導関数に一致している。パルスチェーンの加算は「SW振幅関数」(SW=software)又は略して「SW振幅」と称される。従って、このSW振幅には、時間パターンメモリの内容が更に別のパートプログラムで積分されることによって達することができる。この積分は非常に多数のセルに及んで実行される(TOFは遅延時間で除される)ことになるので、前記と同じ計算は更に別のパートプログラムで、部分期間を考慮することなく、専らカウント値を用いて実行され(「粗積分」)、これは粗SW振幅を結果する。このための計算労力はSW振幅の計算に要される労力のほぼ50分の1以下である。
【0097】
SW振幅のノイズの平均値は更に別のパートプログラムを使用して計算され、SW振幅のパルスを検出するためのSW基準値はノイズパルス検出に必要とされる確率が超えられないようにして決定される。信号パルスの事象は粗SW振幅にSW基準を適用することにより突破点として見いだされる。これらの事象は「SW粗事象」と称される。時間パターンメモリの内容の積分(「精密積分」)は、(遅延時間に変換された)SW粗事象のこれらのアドレスでの中心としてこのアドレスの小さな領域に統合される。SW振幅のパルス形状はこの処理をもたらす。
【0098】
更に別のパートプログラムにおいて、これらのパルスのフランクは直線によって近似され、SW振幅のノイズの中心線と交差させられる。これらの点は可変的なパルス振幅とは独立したパルス最下点であり、温度ドリフトと絶対オフセットに関する先に記録された表値によって補正されて、実際の距離に変換される。
【0099】
別のパートプログラムにおいて、直線はSW基準と交差させられ、交差点は温度ドリフトと絶対オフセットに関する先に記録された表値によって補正されて、実際の距離に変換される。
【0100】
更に別のパートプログラムにおいて、当該SWダウン事象からSWアップ事象を差し引くことによってパルス幅が計算される。このパルス幅は反射パルスの電力の尺度を表しており、原距離値の計算のため、先に記録、記憶され、各々のパルス幅に補正値が対応させられている、補正値付き補正表によって、異なるパルス振幅の結果としてのSWアップ事象のエラー補正に使用される。
【0101】
別の実施形態の評価プログラムにおいて、SW振幅は処理前にフィルタリングされる。ボックスカーフィルタは、低計算労力でSW振幅のデジタル化部分の平滑化が可能であるために、特に好適である。
【0102】
以上に、遅延素子を援用したTPの決定が述べられた。但し、この信号遅延方法はTP測定の唯一の可能性を表しているわけではない。別法として、例えば測定クロック信号のn倍位相変位により、連続した2位相の位相角度差変位された測定クロック信号がTP測定の分解能を決定するようにして、TP測定を行うこともできよう。
【0103】
図9は、ピッチ(ダイオード間隔+ギャップ)(127)、ギャップ(128)及び活性面(126)又はダイオード幅(129)によってほぼ幾何学的に決定される受信アレイ(9)(図3参照)のAPDアレイ(125)の活性ゾーンを示している。約80〜100μmのギャップは、100に等しいか又はそれ以上のレベルの増倍率発生のためのAPDの高バイアス電圧のために不可避である。もしピッチがギャップの2倍の大きさを有していれば、長さ13mm未満のアレイに例えば64ダイオードを作り出すことができる。このアレイが光投射系によって距離場に投影されれば、アレイは、組み合わさって視覚空間角(125a)を形成する64の個別視覚空間角(126a)(図9a参照)を生ずる。空間角のサイズは集束光学系(48)の焦点距離によって決定される。
【0104】
図10は、ピッチ(ダイオード間隔+ギャップ)(132)、ギャップ(133)及び活性面(131)によって同じくほぼ幾何学的に決定されるレーザダイオードアレイの活性ゾーンを示している。製造工程の結果として、ギャップは活性ゾーンの大きさのオーダーで存在し、活性ゾーンの幅は入手可能な多くのレーザダイオードにつきほぼ200μmである。従って、長さ3.2mm未満の例えば8レーザダイオードのアレイを作り出すことが可能である。
【0105】
レーザダイオード間のギャップにより、個別送信空間角が1閉アレイの個別送信空間角を形成するように、2アレイを適切に調整することができる。これらの2レーザアレイで、つまり、16レーザダイオードの個別送信空間角で、64APDの1APDアレイの視覚空間角を、適切に選択された焦点距離の光投射系(47)によってカバーすることができる。このシステムでは、64個の時間測定チャネルを有した1個の時間測定IC又は、4チャネルと、スタートパルス及び信号用のマルチプレクサとを有した1−最小時間測定ICで十分であろう。
【0106】
図17は、APDアレイ(9)がレーザダイオードアレイで置き換えられれば、相応して2レーザダイオードアレイ用に使用することのできる、2APDアレイ(9)用のこのタイプのシステムを示している。
【0107】
更に別の実施形態において、個別送信空間角が64APDの視覚空間角をカバーするように、それぞれに対応した投射レンズを有する16レーザダイオードも調整可能である。図12aには、個別送信空間角(131a)が4ADPSの4個別視覚空間角(126a)の全体をカバーするその種のセグメントが示されている。
【0108】
図10aは、例えば、個別送信空間角が組み合わさって1送信空間角(130a)を形成するように、レーザダイオードアレイ(130)が距離場で投影されるというようにして生ずる個別送信空間角(131a)を示している。
【0109】
図12は、調整望遠鏡を通して光学系をのぞいたときに現われるような、送信空間角と視覚空間角とがオーバラップするように調整されなければならない、APDの4活性ゾーン(126)とレーザダイオードの活性ゾーン(131)とのセグメント(139)の編成を示している。図13は、アレイ(142)を形成するための複数のセグメント(139)の組み合わせを表している。
【0110】
いずれの場合(2レーザダイオードアレイ又は16個別レーザダイオード)にも、各々のレーザダイオードの電力が4APDと4ギャップに分配されるため、レーザダイオードの電力はほぼ1/8に減少する。パルス電力がほぼ50ワットとすれば、6ワット以上がなお1APDに付随しており、これは数百メートルに及ぶ距離測定にとって十分であろう。但し、距離は、視覚空間角サイズを、従って方位分解能も決定する、集束光学系(48)の選択された焦点距離にも依存している。もしも光学活性ゾーン(126)と(131)の寸法が固定されれば、これは通例、素子の可用性が制限されているためにそうであるが、光学系の構成によって、送信空間角、視覚空間角(従って、方位分解能)及びシステムの範囲が固定される。
【0111】
更に、(例えばKEM方式による又は前記KEM特許出願明細書に開示されているような)加算平均法により範囲増大が達成可能である。
【0112】
重要なことは、送信空間角及び視覚空間角の偏向装置を使用することなく、64APDのADPアレイと16レーザダイオードによる送信アレイとを有する1実施例として述べたシステムですでに64点を有する距離プロファイルが得られることである。これによりいわば、実際の意味での、つまり偏向装置例えば回転鏡又は傾倒鏡を使用しての走査なしに、深さ分解能を有するラインスキャナが実現される。こうして得られた距離プロファイルはすでに多くの用途に十分使用することができる。16レーザ、64ADP及び、1個別送信空間角での4個別視覚空間角のカバーへの固定は任意の又は単なる例であるが、但し有意な例として選択されている。
【0113】
制限的パラメータは実際には、半導体レーザダイオードによるパルスレーザの最大パルス繰返し周波数(PRF)によって所与である。50ワットを超えるパルス電力で、少なくとも目下、ほぼ20kHzの平均PRFが可能であるにすぎない。個々のレーザの破損中にも、レーザアレイのその他のレーザを用いて測定を実施することができる。最大作動範囲(距離)を400mとして、すでに上述したように、いわゆるバースト測定としてレーザアレイの16の直列レーザの各々を使用して個別測定が実施されれば、これらの16の個別測定は、逐次に実施され、その持続時間は50μs−これは連続的な距離プロファイル撮像による、20kHzというレーザの最大平均PRFに正確に一致している−未満となろう。このことから直接、時間測定ICはたった4個の時間測定チャネルを有していればよいことになろう(1レーザが64APD/16レーザ=4という4APDに「チャージ」する)。スタートパルスと信号はマルチプレクサ(18及び19)により常に同じ4個の時間測定チャネルにグループで直列に供給される。
【0114】
一般に、時間測定ICのための画素のグループ化につき、最も多様な実施形態の送信/受信アレイとそれらの組み合わせに関して以下の規則を設定することができる。
・1列に線状配置され、個別視覚空間角と個別送信空間角との区別可能なカバーが作り出される空間角セグメント(149)(図12a参照)として分離された距離画素は、送信器の数n及び受信器の数mつまり数(m、n)によって明確に識別可能である。
・送信器の全体として検出可能な電磁波を受け取るこれらの区別可能な距離画素はサブグループとしてグループ化される。
・これら多くのサブグループがグループ化されて、所属する区別可能な距離画素の数が独立した時間測定チャネルの数に等しいか又はそれ以下である1グループ(7a及び13a)(図7参照)を形成する。
・十分な時間測定チャネルが存在しない場合には、グループは逐次にマルチプレクサ(18及び19)を経て誘導されて、1グループに共属する信号(7a)とスタートパルス(13a)が時間測定IC(32)の時間測定チャネルに直列に誘導される。
・時間測定ICに全ての距離画素にとって十分な時間測定チャネルが存在する場合には、共属する信号(7b)とスタートパルス(13b)は時間測定IC(32)の時間測定チャネルに直接に誘導される。
【0115】
ポンピングされれば、例えば2.6kWという基本的に相対的に高いパルス電力の高出力レーザが使用され、パルスが円筒レンズによって64APDの視覚空間角に一致する送信空間角に光学的に拡散されれば、ADP当たり20ワットが利用可能であり、これはkm距離の範囲を可能にすると共に、このレーザの出力を完全利用するためには時間測定ICでは64個の時間測定チャネルが必要とされることとなる。範囲も繰返し周波数も共に相対的に大きな値を取ることから、この構成は、例えば航空機からのいわゆる地形プロファイリングにとって特に好適であろうと考えられる。
【0116】
20kHzでの半導体レーザダイオード送信パルスを使用した距離プロファイル撮像から出発して、適正な高速偏向装置が光学系の前に配置される場合に距離プロファイル撮像が可能となる繰返し周波数を容易に決定することができる。偏向ユニット(50)(例えば図18参照)につき、偏向角90°の4多面鏡スキャナで可能なように、時間の50%にわたり、従って送信空間角と視覚空間角の縦方向に対して横向きに、距離像当たり100距離プロファイルでパルスが送信可能であると想定すれば、毎秒、64*100=6,400画素の100距離像が撮像可能である。測定周波数は640kHzとなろう。この相対的に並外れた測定周波数は、20kHz*0.5時間率*16レーザ*4APD=640kHzで達成される。単一のレーザと単一の受信器による従来のセンサとの比較では、2偏向装置が必要と考えられ、従って、パルス送信の時間は25%に減少するために、5kHzの測定周波数が達成可能にすぎないであろう。従って、6,400距離画素では1Hzの距離像周波数さえ達成不能であろう。
【0117】
測定周波数640kHzでの距離像繰返し周波数25Hzにつき、精度を高めるための4倍の加算平均又は第2の偏向ユニットによる像幅の倍化を行うことができ、なお従来の撮像カメラのレンジの距離像周波数が達成されよう。
【0118】
このシステムについては、1レーザダイオードの電力が複数のフォトダイオードに分割される点が考慮されなければならない。これは、もっぱら個別送信空間角と個別視覚空間角及び光学系の寸法が異なって選択される点で基本的に同じ、本発明による装置で回避することができる。
【0119】
図14、15は、レーザダイオードの電力が複数のAPDに分割されず、これによって、範囲が基本的に高められる装置の送信素子の活性ゾーン(131)と受信素子の活性ゾーン(126)を示している。光学系のパラメータの適切な選択によって、複数の個別送信空間角が1個別視覚空間角を含むように、APDアレイ要素の活性ゾーン(126)は線状に拡張されている。セグメント(139)はアレイ(142)に拡張することができる。これら2つのシステムの中間的な解決法も実現可能である。特別な1例は正確にAPDごとに1レーザであろう。時間測定ICのための距離像点のグループ形成につき先述した規則は全ての態様に当てはまる。なお更に別の特別な1例において、1レーザと1受信器だけが存在し、受信器の視覚空間角はレーザの送信空間角を含んでいる。このシステムは本発明による相対的に単純な距離センサに相当する。
【0120】
いかなる組合せの送信及び受信アレイ、いかなる寸法の活性ゾーン及び光学系、いかなるタイプの時間測定ICが使用されるかは必要性とコストの問題である。アレイの送信素子及び受信素子は固有の寸法を有することから(市場での入手可能性及び物理的理由)、図12/13に示した構成は特に、装置が高い方位分解能を有する必要があるが、比較的低レンジであってよいときに使用され、図14/15に示した構成は、装置が方位分解能は低いが比較的大きなレンジで大きな角度範囲を有する必要があるときに使用される。個別測定の評価のタイプは基本的に同じである。
【0121】
受信素子としてのAPDアレイによる上述した受信アレイにより、事実、レンジ内にある目標物の、実際3%〜100%(倍率33)で生ずる異なる反射率の結果として、膨大な信号移動が存在する。信号は2〜200mの異なる距離で全体として33*10,000=330,000という荷重倍数を有する(二乗依存性により倍率10,000)。信号光の一部は上述したギャップに陥り、同所において−大量の信号により−所望の信号と重なり合う、少ないが但し十分な電気的混信パルスが発生するが、これはアレイ技法の基本的な問題である。
【0122】
この作用はシャドーマスク(134)(図16参照)により劇的に減少させることができる。シャドーマスク(134)はまた、APDの活性ゾーンに入射すると考えられる光のみを通過させるように設計されている。シャドーマスク(134)は、図16に示したように、APDアレイに直接取り付けられる。望ましくない光が活性ゾーン領域にまったく入り込まないようにするため、シャドーマスクが鏡面コートされるか又はシャドーマスクがAPDアレイのカバープレート又はAPDに不透過性材料でプリントされることにより、残りの光を回避することができる。
【0123】
但し、シャドーマスクの孔を通過する光の一部はAPDによって反射されて、シャドーマスクの下側から逆反射され、一定の条件下で散乱させられることもある。ほぼ2回の往復反射の後、この光は隣接活性ゾーンに達し、同所で妨害信号として作用することがあろう。この作用は、シャドーマスクが鏡面層として形成されている場合に、キャリアガラスの背面に信号光を吸収する材料層が設けられることによって減少させることができる。更に、ただほんの僅かな光(逆反射された信号光のほぼ10%)がシャドーマスクの背面に当たるであろう。ADPの反射率が約20%で、吸収性材料の反射率が約5%であれば、10%*(20%*5%)2=10−5の減少となる。それ故、この妨害信号は、上述したダイナミックレンジとの比較が示すように、弱い信号の範囲内にある。
【0124】
こうした理由から、更に別の実施形態において、シャドーマスク(134)はAPDアレイ(9a)の前に密接して配置されるのではなく、図17に示されているように、受信アレイの集束光学系(48)の焦点面に例えば45°の角度で配置されることができ、シャドーマスクは更に別のレンズ(156)によりその背後に配置されたADPに投影される。今や、吸収層が省かれる場合に逆反射される光(158)はシャドーマスク(134)の鏡面コート層の下側により、もっと離れて配置された吸収体上に反射され、同所で消滅させられる。従ってこのようにして、こうしたシャドーマスク(134)を援用してセンサ素子を効果的に互いに光学的に絶縁することが可能である。
【0125】
図17は、シャドーマスクの更に別の重要な利点を示している。シャドーマスク(134)が焦点面に配置される場合、装置の近接作動範囲内に位置し、それ故強い信号を反射する目標物の信号は焦点面の後方に投影される。これにより、これらの信号のごく一部がシャドーマスクの孔を通って入射するように焦点面の信号像は非常に拡大される。
【0126】
孔の寸法設計が最大作動範囲のための画像化サイズに適合されれば、信号動特性は近接場の信号の減少により10分の1に減少させることができる。この効果は双方のケース(APDの直前又はAPDアレイへの45%投影でのシャドーマスク配置)に利用することができる。鏡面コート層を有する、45°の傾斜で設定されたシャドーマスクは更に、上述したように、密な視覚空間角を生成するために2APDアレイを使用するための幾何的スプリッタとして好適である。
【0127】
同様に、この形のシャドーマスクの使用は密な送信空間角を生成するために2レーザダイオードアレイを組み合わせるのに好適であろう。上述した実施例における距離画素数はこれにより12,800に増加させることができる。この場合、この増加は、時間測定ICに2倍の数の時間測定チャネルが存在すると共にマルチプレクサが相応して拡張されれば、距離像周波数の減少を結果するには及ばない。この実施形態の装置において、時間測定ICは8個の時間測定チャネルを有し、マルチプレクサは4個の時間測定チャネルを並列に2回「チャージ」する。
【0128】
センサアレイ及び送信素子アレイに適した時間測定回路は好ましくは例えばCMOSによる集積されたICとして製造される。こうして、距離プロファイルは偏向ユニットなしで撮像可能であり、距離像は単一の偏向ユニットとの組み合わせで撮像可能である。特に好適な時間測定法は前記KEM特許出願明細書に述べられている。本発明による測定チャネル用回路を有した時間測定ICによる特にKEM特許出願明細書に述べられているような時間測定法の実現と、本出願に述べられているような要素の配置とは、距離撮像にとって特に有効である。
【0129】
本発明により、距離プロファイル撮像(2D)用装置は偏向ユニットにより、より広い距離プロファイル撮像(より大きな角度範囲による2D)用装置又は距離撮像(3D)用装置に拡大することができる。距離プロファイル並びに距離像はいずれも、送信空間角及び視覚空間角の偏向に使用される偏向ユニットのタイプとは基本的に無関係である。
【0130】
図18は、多面鏡(51)が駆動モータ(55)によって回転軸(52)を中心にして回転させられ、回転角が角度測定装置例えば角度読取り器(54)を備えたコード輪(53)によって検出される偏向ユニットを示している。多面鏡としては、例えば2、4又は6鏡面(56)を組み合わせて多面鏡(51)とすることができ、2つの面は両面鏡に相当している。この偏向ユニットは以下、多面偏向ユニット(50)と称される。
【0131】
これらの多面偏向ユニットの2つを互いに交差するように取り付けて、組み合わせ、3D多面偏向ユニットと称される偏向ユニットを形成することができる。
【0132】
図(20)は自動トランシットの望遠鏡に代わる距離プロファイル撮像用の集成装置を示している。ここで、自動とは、トランシットの水平軸と垂直軸がモータによって駆動され、予め設定可能な角度範囲内で空間角を連続的に移動させることができることを意味している。この点で、運動は、距離画素で均一に満たされた距離像が生ずるように制御される。このタイプの偏向ユニットはトランシット型偏向ユニットと称される。
【0133】
図(21)は、垂直偏向のための多面偏向ユニットと、図19に示したような水平偏向のための回転テーブル(59)による垂直軸まわりの回転との組み合わせを示している。この偏向ユニットは回転テーブル/多面偏向ユニットと称される。
【0134】
更に、偏向方向は、図(21及び22)に示されているように、送信空間角又は視覚空間角の方向又はそれらに対して横向きの方向に行なうことができる。送信空間角と視覚空間角の方向への偏向(縦方向偏向(63))はより長い距離プロファイルを生じ(2D)(図21)、他方、送信空間角と視覚空間角の方向に対して横向きの偏向(横方向偏向(62))は距離像(3D)(図22)を生ずる。
【0135】
距離プロファイル撮像用装置を、送信空間角と視覚空間角をアレイ方向又はそれに対して横方向に回旋させるためのそれ自体公知の偏向ユニットと組み合わせ、又、装置を可動キャリアに取り付け、送信空間角と視覚空間角をアレイ方向又はそれに対して横方向に運動させ、送信空間角と視覚空間角をアレイ方向とそれに対して横方向に回旋させることにより、距離プロファイル撮像用装置から距離撮像用装置に移ることができる。こうして、それぞれの異なる用途に文句なしに適した、但しそれでいて基本設計及びブロック図の点でほぼ同じ、距離撮像のための極めて多様な装置及びシステムが結果する。可動キャリアは、例えば、車両、クレーン、移動体作業プラント、ヘリコプタ又は航空機である。
【0136】
以下、純然たる例示によって、特定の用途を有する、特別なタイプのこれらの撮像用装置を説明する。
【0137】
図21は、パノラマ距離撮像のための、多面偏向ユニット(50)及び回転テーブル(59)と組み合わされた装置(61)を示している。垂直に配列された距離像片は、例えば、採石場、露天鉱操業現場、建築現場又は谷間における全周距離像用に使用することができる。
【0138】
図22は、送信空間角と視覚空間角が偏向方向に垂直に配向された基本的に同じ装置を示している。この装置は、大きな垂直空間角の距離像に特に好適である。APDアレイ(例えば図9参照)のピッチ(132)のn分の1以下の孔寸法を有し、同じ個別送信空間角で送信するnレーザを備える特別な態様のシャドーマスクにおいて、この装置はn倍高い方位分解能で、垂直に配向された距離プロファイルの高速撮像に好適である。
【0139】
図23は、図22に示した装置と同じであるが、この場合、該装置は移動方向(64)のキャリア車両(65)上に搭載されている。キャリア車両(65)が運動し、垂直にかつ移動方向に対して直角に配向された距離プロファイルが走行中に撮像される場合には、全ての距離プロファイルは組み合わさって円柱座標による周囲距離像を形成する。反対側の周囲は、偏向ユニット(50)の上方に取り付けられた更に別の装置(61)を使用して撮像することができる。とびとびの点で、キャリア車両を静止させ、回転テーブル(59)を使用して、移動路に沿ったパノラマ距離像を撮像することも可能である。このタイプの距離撮像は特に都市の測定に適しているが、それは道路の左右の目標物が異なる角度で測定され、道路に対して角度をなして配向された面もこうして検出されるからである。
【0140】
図24は、図21に示した装置と同じであるが、但し回転テーブルなしで、航空機(66)の下側に取り付けられ、実際、垂直方向又は横方向偏向(62)が行われると共に、飛行方向(67)に送信空間角及び視覚空間角が配向される装置を示している。この装置を用いて、下方の地形のエンドレスな距離撮像が可能である。本発明による装置の高速測定速度により高速飛行速度でも距離撮像が可能である。
【0141】
図25は、互いに直交配置された2多面偏向ユニット(50)を含む3D多面偏向ユニットと組み合わされた距離プロファイル撮像用の装置(68)を示している。この装置を用い、空間角(71)で高速の距離撮像が可能である。空間角がもっと小さければ、単一の多面偏向ユニット(50)でも十分であろう。安全スペース(69)は空間角(71)内に定められる。この安全スペース(69)内で目標物が検出されれば、作業プラント(70)を停止させる信号が生成される。
【0142】
図26は、互いに直交配置された2多面偏向ユニット(50)を含む3D多面偏向ユニットと組み合わされた距離プロファイル撮像用の装置(68)を示している。この装置を用い、材料の増減を実施する作業プラント(70)の作業ゾーン内において空間角(72)で高速距離撮像が可能である。距離像は作業プラント(70)の作業目標物に応じて評価され、作業プラント(70)の制御に適切に使用される。
【0143】
図11は、本発明の更に別の1実施形態において、受信器(2)(例えばAPD)及び送信器(10)(例えばレーザダイオード)又は、受信器の活性検出面126又は個別視覚空間角126a(以下、単に「受信器」とする)及び送信器の活性ゾーン131又は個別送信空間角131a(以下、単に「送信器」とする)の考えられ得る更に別の配置を示している。受信器は第1の方向に伸長されて構成され、第1の方向に対して直角に延びる第2の方向に互いに「積み重ねて」配置されている。互いに平行に配置された複数のセンサはそれらの幅全体に及んで、つまりそれらの長手方向伸長方向に配置され、同じく伸長されて、それぞれ全てのAPDアレイ要素(受信器)をカバーしており、送信器の長手方向伸長は受信器の長手方向伸長に対して90°回転されている。送信器は直列にトリガされ、実際それぞれの場合に、最大TOFの経過後にトリガされる。この配置は受信器及び/又は送信器の長手方向伸長の方向に反復によって連続させることができる。この配置が空間中で1又は複数の偏向ユニットによって運動させられる場合には、どの偏向角度方向においても密な距離画素配置が生ずるようにして送信器のトリガ時間を設定することができる。図11に示した配置では、4×8=32の画素が結果する。
【0144】
従って一般に、互いに平行な、伸長された受信器/検出面/個別視覚空間角とそれに対して横方向に延びる、互いに平行な、伸長された送信器/送信面/個別送信空間角とのマトリックス状又は格子状の構造を設けることができ、送信器は好ましくは直列に動作させられる。このマトリックス構造又は格子構造は基本的にもはや、先述したような「ラインスキャナ」ではなく、当該数の画素の面状配置が実現されることからして、すでに「深さ分解能付き3Dカメラ」と称することができる。この「ミニ距離像カメラ」を空中で1又は複数の偏向ユニットによって運動させることにより、より大きな像を−十分に高い像繰返し周波数で−つまり、十分に高い画素数を有する像を撮像することができる。
【0145】
以下に、本発明の更に別の考えられ得る実施形態を挙げる。
【0146】
本発明により以下のようにすることが可能である。
−基準(5)が異なるレベルに設定された2又はそれ以上の比較器(4)が受信増幅器(3)の後に接続され、及び
−1測定チャネルが各々の比較器出力のために可用化され、
−同所で、当該スタートパルス事象を有する比較器出力の全ての事象の時点が測定されるようにすること。
【0147】
本発明により更に以下のようにすることが可能である。
−各々の偏向ユニット(50)は、モータ(55)によって駆動されて回転軸(52)を中心に回転する、全ての鏡面(56)が回転軸と平行に回転軸まわりに取り付けられた多面鏡(51)と、
−偏向角度を測定するための角度測定装置(53、54)とを含むこと。
【0148】
本発明により更に以下のようにすることが可能である。
−少なくとも1偏向ユニットは、偏向方向が制御可能な電子制御式MEMS鏡スキャナとして作製されること(MEMS=超小型電子機械系)。
【0149】
本発明により更に以下のようにすることが可能である。
−2偏向ユニットが電子制御式MEMS鏡スキャナとして作製されること。
【0150】
本発明により更に以下のようにすることが可能である。
−偏向ユニットは、モータ駆動される制御可能な垂直軸と水平軸とを有する電子制御式トランシット偏向ユニットとして作製されること。
【0151】
本発明により更に以下のようにすることが可能である。
−第1の偏向ユニットは制御式多面偏向ユニット(50)として作製され、
−第2の偏向ユニットは電子制御式回転テーブル(59)として作製されること。
【0152】
本発明により更に以下のようにすることが可能である。
−1又は複数の線状活性ゾーンを有する半導体レーザダイオードが送信素子(10)として使用されること。
【0153】
本発明により更に以下のようにすることが可能である。
−半導体レーザダイオードは、活性ゾーンがギャップによって断続される線を形成するレーザダイオードバー又はストリップの形のレーザアレイとして作製されること。
【0154】
本発明により更に以下のようにすることが可能である。
−レーザビーム線状パルスの発生は、半導体レーザダイオードを使用してポンピングされる固体レーザで行われ、
−該レーザのほぼ平行な電磁波はシリンドリカルレンズによって拡大されて投射線状空間角を形成するようにすること。
【0155】
本発明により更に以下のようにすることが可能である。
−レーザビーム線状パルスの発生はラマン・レーザによって行われ、
−該レーザのほぼ平行な電磁波はシリンドリカルレンズによって拡大されて投射線状空間角を形成するようにすること。
【0156】
本発明により更に以下のようにすることが可能である。
−レーザビーム線状パルスの発生は、パルス化法で動作する半導体CWレーザを使用して行われること。
【0157】
本発明により更に以下のようにすることが可能である。
−送信素子アレイは線状に直列配置されたLEDを含んでいること。
【0158】
本発明により更に以下のようにすることが可能である。
−結像光学レンズ系が投射系(47)及び/又は電磁波集束系(48)として使用されること。
【0159】
本発明により更に以下のようにすることが可能である。
−レーザアレイ(16a)の投射系は1投射レンズアレイを含み、
−送信アレイ(16a)の各々のレーザ(15a)は専用の投射レンズを有し、
−該レーザの個別送信空間角(131a)は組み合わさって線状送信空間角(130a)を形成し、
−該レーザの活性ゾーンは特に、アレイ配列に対して斜めに設定され、
−それぞれ1レンズが1送信モジュール(15a)に対応し、
−レンズは特にGRINレンズであってよいこと。
【0160】
本発明により更に以下のようにすることが可能である。
−APDアレイ(125)の各々のAPDはアレイ配向に対して斜めに配向されるため、
−ギャップなしAPDアレイがアレイ方向に対して横向きに形成されること。
【0161】
本発明により更に以下のようにすることが可能である。
−シャドーマスク(134)がAPDアレイ(125)に前置され、
−APDアレイの各々のAPDには当該個別視覚空間角(126a)からの反射光がシャドーマスクの孔の1つを通過して達することができ、
−シャドーマスク(134)は電磁波集束系(48)の焦点面に配置され、
−孔の形状は方形であり、
−特に、それぞれの孔の寸法はAPDアレイ要素の活性面の寸法よりも小さく、
−特に、該寸法はAPDアレイの活性面のピッチのn分の1より小さく、この場合、nは整数であってよいこと。
【0162】
本発明により更に以下のようにすることが可能である。
シャドーマスクは
−孔の領域が透明であり、
−受信方向で見て、孔の外側は鏡面コートされていて、使用される光にとって透過性がなく、
−APDアレイ側から見て、特に、大幅に反射を減少させる層が設けられていること。
【0163】
本発明により更に以下のようにすることが可能である。
−シャドーマスク(134)はAPDアレイのカバープレートにプリントされ、
−プリント材料は使用されるレーザ線を大幅に吸収すること。
【0164】
本発明により更に以下のようにすることが可能である。
−APDアレイ配列のシャドーマスクの孔はAPDアレイのAPD素子のピッチのn分の1より小さく、
−同じ個別視覚空間角にnレーザが配列され、
−レーザは、偏向中にシャドーマスクによってサイズの減少させられた個別視覚角が直列に組み合わさって閉パターンを形成するように、直列にトリガされること。
【0165】
本発明により更に以下のようにすることが可能である。
−それぞれ受信素子アレイとしての1APDアレイを有した2受信アレイ(9)が使用され、
−該アレイはシャドーマスクの後に接続されたそれぞれのレンズを介して反射光でチャージされ、
−電磁波集束系の焦点面に配置された、斜め配向され、鏡面コートされたシャドーマスクは幾何的ビームスプリッタとして機能し、
−2APDアレイは、双方のAPDアレイの個別視覚空間角が組み合わさって密な線状空間角を形成するように、調整されること。
【0166】
本発明により更に以下のようにすることが可能である。
−レーザアレイバーによる2送信アレイが送信素子として使用され、
−これにより2チャネルが、幾何的ビームスプリッタとしての、光投射系(47)の焦点面に配置された、鏡面コートされて斜めに配向されたシャドーマスク(134)によって形成され、
−該2チャネルにおいて1レンズ(156)がそれぞれシャドーマスクの後に接続されて、レーザアレイバーの光はレンズでシャドーマスクに投影され、
−レーザアレイバーは、双方のバーの個別送信空間角が組み合わさってギャップなし線状送信空間角を形成するように、調整されること。
【0167】
本発明により更に以下のようにすることが可能である。
−1又は複数の装置が航空適合車両の下に取り付けられ、
−該装置の線状視覚・送信空間角が飛行方向に対して横向きに組み合わさって下方に向けられた広い空間角を形成し、
−地表の距離プロファイルが連続的に撮像、記憶され、
−特に、複数の距離プロファイルが加算平均されて距離プロファイルを形成し、
−距離プロファイルは集成されて地表の距離像を形成すること。
【0168】
本発明により更に以下のようにすることが可能である。
−1又は複数の装置が航空適合車両の下に取り付けられ、
−線状視覚・送信空間角が飛行方向に組み合わさって下向きの広い空間角を形成し、
−送信・視覚空間角は偏向ユニットを使用して飛行方向に対して横向きに連続的に偏向され、
−飛行方向に対して横向きに配された距離像片が撮像、記憶され、
−特に、距離像片は飛行方向において互いにオーバラップし、
−距離像片は集成されて地表の距離像を形成すること。
【0169】
本発明により更に以下のようにすることが可能である。
−1又は複数の装置が車両(65)上に取り付けられ、
−線状視覚・送信空間角は移動方向(64)に対して直角をなして配向され、
−該空間角は偏向ユニット(50)により視覚・送信空間角に偏向され、
−車両周囲の距離プロファイルが走行中に連続的に撮像・記憶され、
−該距離プロファイルの配向は走行方向に対して90°以外で水平に固定され、
−距離プロファイルは集成されて車両周囲の距離像を形成すること。
【0170】
本発明により更に以下のようにすることが可能である。
−静止時に、撮像装置は回転テーブルの回転によって垂直軸を中心に回転させられ、
−距離プロファイルが連続的に撮像、記憶され、
−距離プロファイルは集成されて、車両周囲の球面座標による距離像を形成すること。
【0171】
本発明により更に以下のようにすることが可能である。
−それぞれnレーザが同じ個別視覚空間角に配向され、
−nレーザは、偏向中にシャドーマスクによってサイズの減少させられた個別視覚角が直列に組み合わさって閉パターンを形成するように、直列にトリガされ、
−距離プロファイルがn倍の高さの分解能で測定され、
−距離プロファイルは集成されて環境の距離像を形成すること。
【0172】
本発明により更に以下のようにすることが可能である。
−空間角領域の境界座標が入力され、
−予め設定された空間角領域の掃引によって当該距離像が撮像、記憶されること。
【0173】
本発明により更に以下のようにすることが可能である。
−送信・視覚空間角が水平に配向され、
−装置が回転テーブルを使用して垂直回転軸を中心にモータ駆動されて回転させられ、
−空間角領域の境界座標が入力され、
−予め設定された空間角領域の掃引によって当該距離像が撮像、記憶されること。
【0174】
本発明により更に以下のようにすることが可能である。
−装置が材料の除去又は供給を行なう作業プラント(70)に接続されて、装置の作動空間角(72)が作業プラントの作業範囲に整合され、
−目下の作業ゾーンの距離像が連続的に撮像され、
−比較面の面座標が入力され、
−距離像がプラントの作業目標物に応じて評価され、
−プラントは評価結果に従って制御されること。
【0175】
本発明により更に以下のようにすることが可能である。
−装置が1又は複数の作業プラントの上方に取り付けられ、
−距離撮像が可能な装置空間角はモニタされるべき作業プラント(単数又は複数)の運動ゾーンに整合され、
−空間角はモニタされるべき作業プラントの運動ゾーンよりも大きく選択され、
−距離像が連続的に撮像され、
−3次元安全スペースが事前定義されて、記憶され、
−距離像は、物体の侵入の有無又は、装置によってモニタされる空間角内に、定義された安全スペース内で検出されるほど深く、物体が侵入したか否かについて評価され、
−安全スペース内で物体が検出されると信号が導出され、
−信号は1又は複数の作業プラントの電源遮断又は作業プラントの運動ゾーンを制限するために使用されること。
【0176】
本発明により更に以下のようにすることが可能である。
−距離プロファイル又は距離像が撮像される空間角は更にCCDカメラで撮像され、
−色、輝度、距離、電力及び/又はパルス幅に関する情報が組み合わされて距離像情報を形成すること。
【図面の簡単な説明】
【0177】
【図1】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図2】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図3】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図4】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図5】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図6】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図7】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図8a】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図8b】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図8c】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図9】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図9a】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図10】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図10a】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図11】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図12】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図12a】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図13】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図14】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図15】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図16】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図17】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図18】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図19】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図20】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図21】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図22】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図23】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図24】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図25】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図26】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【符号の説明】
【0178】
1 光パルス
2 受信素子、アバランシェフォトダイオード
3 受信器の増幅器
4 受信器の比較器
5 比較器の基準
7 受信器の出力信号、時間測定チャネルのための入力信号
7a マルチプレクサの出力
8 受信モジュール
9 受信アレイ
10 送信素子、半導体レーザダイオード
11 電流パルサ
12 トリガ信号
13 スタートパルス
13a マルチプレクサの出力
14 レーザビーム、光レーザパルス
15 レーザモジュール
16 レーザアレイ
17 測定プロシージャ制御
18 マルチプレクサ
19 マルチプレクサ
20 入力ミクサ
21 パルススイッチ
22 TPセパレータ
23 カウンタ
24 遅延アレイ
25 デコーダ
26 メモリ
27 インタフェース
28 マイクロプロセッサシステム
29 時間測定制御
30 クロックユニット
31 サブアレイ要素
32 時間測定IC
33 測定クロック
47 光投射系
48 電磁波集束系、集束光学系
50 偏向ユニット
51 多面鏡
52 回転軸
53 コード輪
54 角度読取り器
55 駆動モータ
56 鏡面
59 回転テーブル
61 距離撮像装置
62 横方向偏向
63 縦方向偏向
64 移動方向
65 キャリア車両
66 航空機
67 飛行方向
68 2多面偏向ユニットを備えた装置
69 安全スペース
70 作業プラント
71 空間角
72 空間角
73 スタートパルス
74 マスキング信号
75 アナログエコー信号
76 受信器のノイズ
77 アナログ受信信号
79 結果信号
80 パルスチェーン
81 正のフランク、アップ事象
82 負のフランク、ダウン事象
83 測定クロック信号
84 アップTP信号
85 部分期間アップ事象
86 カウント数アップ事象
87 ダウンTP信号
88 部分期間ダウン事象
89 カウント数ダウン事象
90 オーバラップ
91 オーバラップ
125 APDアレイ
125a 視覚空間角
126 活性面
126a 個別視覚空間角
127 ピッチ
128 ギャップ
129 活性面の幅
130 レーザダイオードアレイ
130a 送信空間角
131 活性面
131a 個別送信空間角
132 ピッチ
133 ギャップ
134 シャドーマスク
139 セグメント
142 複数のセグメントのアレイ
149 空間角セグメント
156 レンズ
158 逆反射光
【技術分野】
【0001】
本発明は独立請求項1及び34に記載の多数の距離画素を含む距離像を撮像するための方法及び装置に関する。本発明は更に、本発明による前記方法を実施するための及び/又は本発明による前記装置のための請求項64に記載の時間測定器を有するICモジュールに関する。
【背景技術】
【0002】
「距離像」とは本書において、距離画素の2次元配列として理解されるのみならず、1次元配列としても理解される。これらはプロファイルとも称され、つまりは、それぞれ互いに隣接配置された単列の距離画素を含む距離像である。
【0003】
距離測定の目的は、パルス電磁波(ここでは簡潔に「信号」又は「信号パルス」と称する)の送信と目標物によって反射された信号パルスいわゆる「エコーパルス」の到着との間の時間を測定することである。これらの時間は、電磁波の伝播速度が不変であるという性質に基づいて、反射目標物からの距離に変換することができる。この目的を満足する、ここで一括して「パルスTOFセンサ」と称する装置には多数の実施形態が存在する。TOFは「飛行時間」を意味しており、ここでは、信号パルスが目標物に達して戻るまでに要する時間を示す。
【0004】
既存のセンサは一般に以下を有する(図1〜6も参照)。
・パルス電磁波(14)を発生させる送信器(15)、例えば、光パルス(14)を発生させるパルスレーザダイオード(10)及び電流パルサ(11)を含むパルスレーザ(15)。
・反射された信号パルスを検出する受信器(8)、例えば、フォトダイオード又はAPD(アバランシェフォトダイオード)(2)、広帯域増幅器(3)、及び、ノイズパルスの検出を確実に避けるべく、基準(5)がアナログ出力信号のノイズの4.5NEP(ここで、「NEP」とは「ノイズ等価電力」−ノイズの実効値の補正電力−を意味する)よりも大きい比較器(4)。
・デジタル化された、つまり、比較器によってデジタル信号に変換されたスタートパルス及びエコーパルスを共に論理パルス又はゲートパルスに変換する時間測定回路。ここで、前記論理パルス又はゲートパルスは、
a)TAC(時間−アナログ変換器)を使用して電圧信号に直接変換され、この電圧は続いてADC(アナログ−デジタル変換器)を使用してデジタル値に変換されるか、又は
b)ゲートパルスにあたる測定クロック信号の正のフランクの爾後のカウント、即ちTOFのデジタル値を表すカウントによる正確な測定クロック信号のゲーティングに使用されるか、又は
c)ゲートパルスにあたる測定クロック信号の正のフランクの爾後のカウントによる測定クロック信号のゲーティングに使用されると共に、更に、2TPパルス(TP=部分期間)の導出に使用され、TPパルス幅はTACと続いてのアナログ−デジタル変換器を使用してデジタル値に変換され、TOFが部分値から集成されるか、又は
d)ゲートパルスにあたる測定クロック信号の正のフランクの爾後のカウントによる測定クロック信号のゲーティングに使用されると共に、更に、2TPパルスの導出に使用され、TPパルス幅はTDCを使用してデジタル数に変換され、TOFが部分値から集成される。
【0005】
時間測定回路又は該回路部分は多くの場合に、所要のスイッチング速度と複雑さのために、集積された「時間測定IC」として構成される。信号パルスは、複数のエコーがそれぞれ異なるTOFで時間測定回路に入るように連続的に配置された複数の目標物に当たるので、それらの当該ゲート幅が測定されなければならない。一定の時間測定回路において、複数のエコーの発生は少なくとも2エコーパルスに属するTOFが並列接続された2時間測定回路を使用して測定されることによって考慮される(倍パルス評価)。
【0006】
これらの単純なセンサは鏡スキャナを利用して2Dセンサに拡大され、或いは互いに直交配置された2台の鏡スキャナを利用して3Dセンサに拡大され、これらを用いて2D又は3D距離像を得ることができた。距離像は、CCDカメラで撮像された画像の場合のように色及び輝度ではなく、距離及びオプショナルに電力が各々の画素(多数の空間角セグメントを含むより大きな空間角の空間角セグメント)に対応させられて、生成される。
【0007】
既存のセンサは一般に、使用されるレーザモジュールの最大パルス繰返し周波数によって、測定値を得る速度が制限される。数100mの距離測定に要される数10ワットの電力を有するパルスレーザダイオードによるパルスレーザではパルス繰返し周波数はおよそ20〜30kHzに限界されるため、これらのセンサを使用した2D又は3D距離像の撮像は非常に緩慢に(数Hzで)しか行うことができない。これはCCDカメラのような純然たる画像センサに比較して非常に緩慢であり、所定の空間角内での動的プロセスの検出には不適である。
【0008】
ノイズパルスの回避が必要とされるため、一般に既存のパルスTOFセンサの感度はノイズの4.5NEPより大である。
【0009】
4.5NEPより大への感度の上昇は一般に、受信器のアナログ信号が高速走査速度を実現するACD(アナログ−デジタル変換器)によってデジタル化されることによって、達成され得た。測定が反復されて、アナログ/デジタル変換された測定信号が加算平均されれば、ノイズは加算平均深さの平方根だけ減少し、他方、信号パルスは同一レベルに維持されるであろう。そのために十分な測定時間が供されれば、これによりSN比は加算平均深さの平方根に比例して改善され、これは一般に感度の上昇に一致するであろう。但し、変換速度が数GHzでなければならないために技術的労力は膨大なものであり、平均値算出に要される演算労力も必然的にそれに比例して高まることになる。この理由で、現在のパルスTOFセンサの感度限界は一般に4.5NEPに等しいかそれより大であるので、このタイプのセンサは市場において枢要な意義を獲得するに至らなかった。
【0010】
[現在の技術水準のパルスTOFセンサの短所]
それ故従来の技術の短所は以下の通りである。
・エコーパルスと混同されて結果が偽化されるためにノイズパルスが検出されてはならないことから、感度(最小SN比)は4.5NEPに等しいかそれより大に限界される。
・TOFの間に単一のエコーパルス、稀な場合に2エコーパルスしか処理することができず、従って、雨、雪、霧又は汚濁したセンサ限界ガラス又は複数の衝突目標物からの反射はTOFの間に評価不能であり或いは測定を不可能にさえし得るため、パルスTOFセンサの外部使用は大きな制限を伴ってしか実現することができない。
・複数の信号パルス又は信号パルスの一部の並列処理は不可能である。
・一般に比較器閾値を低くセレクトするとTOFの間にますます多く発生するノイズパルスのような多数のパルスは既存の時間測定回路では測定不能である。
・2D距離撮像(プロファイル)は可動鏡付きのスキャナなしには不可能である。
・3D距離撮像は可動鏡付きの2台のスキャナでしか行えない。
・2D又は3D距離撮像にとって十分な速度は達成不能である。
【0011】
更に、電子カメラ、広域センサ素子として優勢なCCDチップ付きカメラが公知であり、長年にわたってデジタル画像撮像に使用されてきている。これらのカメラは静的記録(「静画像」)並びに連続的記録(「動画像」)のいずれをも高品質、高分解能、十分な速度で供給することができ、それ故極めて多彩な製品とその普及を達成した。
【0012】
こうして、強力な光パルスが送信されて、反射信号が個々の画素センサに取り込まれ、この取込みが適切な時点に中断されるため、各々の画素センサに距離に応じた電荷量が蓄積されるようにして、各々の画素の距離測定用に改良CCDチップが使用される距離撮像カメラが存在している。これらのセンサでは非常に大きな電力と加算平均労力にもかかわらず非常に小さな範囲しか達成されないために、これらは、方位分解能を別として、あらゆる要求の点から見て貧弱な妥協の産物である。
【0013】
画素ごとの色及び輝度からなる純然たる画像情報に加えて、距離及び信号電力の情報を得ることが多くの場合に望ましい。画素ごとの距離及び電力の情報を含むこうした「画像」は以下、距離像と称される。本発明によりそのための改良された装置が明らかにされるセンサタイプは、特に連続デジタル2D及び3D距離撮像用の装置を含んでいる。以下において、2D距離像は「距離プロファイル」とも称される。
【0014】
距離像の情報は当然のことながら数の配列からなっている。角度が別個に示される必要がないように、配列中の値の位置は極座標系ないし球座標系における距離画素の角度を表している。更に、距離像の分解能と合成方式が既知でなければならない。距離像は、例えば距離と色との対応化等の戦略によってしか人にとって可視化することはできない。但し、立体的に撮像された1又は2画像からデジタル値としての距離情報を得るにはかなり多くの労力が必要であり、像化される目標物からの距離が増すにつれて精度は悪化する。幾何的距離値を処理するどんな制御、オートメーション装置或いは測定システムもデジタル値としての距離を必要とするために、距離撮像のための装置のニーズが存在する。
【0015】
距離撮像の場合、本発明によれば、特に、反射目標物に達して戻ってくるまでの飛行時間が測定される短いパルス電磁波による距離測定に限定される。既述したように、この方法は「パルスTOF測定」と称される。この技術は、それにより、広い作動範囲で、距離に応じたエラーを低下させて速やかに距離測定が行えるという利点を有する。
【0016】
現在入手可能な単純なセンサは鏡スキャナを利用して2Dセンサに拡大され、或いは互いに直交配置された2台の鏡スキャナを利用して3Dセンサに拡大されて、これらを用いて一般に2D又は3D距離像を得ることができた。既存のセンサによれば、測定速度は一般に、使用されるレーザモジュールの最大パルス繰返し周波数によって限界される。更に、秒あたりの総偏向回数は距離像の行、列の数と繰返し周波数の積に等しいことから、鏡スキャナに生ずる機械ひずみは非常に高い。前記の積は一般に、使用される送信器の平均繰返し周波数をかなり上回っているため、既存のセンサは上述した理由だけからしても距離像の撮像には不適である。
【0017】
現在知られているパルスTOFセンサの問題は、今日既存のあらゆるセンサないし測定システムに下記並びに既述した短所の1又は複数が存在することである。即ち、
・2D、3D距離撮像に十分な速度を達成することができず、せいぜい非常に緩慢な動作でしか撮像が行えない。
・鏡スキャナは高い機械ひずみに曝される。
・外部使用への適性は非常に制限されている。
【0018】
更に、距離像生成のために、
・光学軸がベース間隔を有する2台のカメラを用い、対応関係によって画素の距離を求めることのできる立体カメラシステムが存在する。これらのシステムは膨大な計算と、距離と共にエラーが大幅に増大するという欠陥があることから、非常に限定された使用分野にしか適していないように思われる。
・レーザ線が目標物上で走査させられて、CCDカメラによって測定される三角測量システムが存在する。距離プロファイルは線の変位から計算することができる。これらのシステムは範囲が小さく、距離と共に測定エラーが増大する。
・例えば空中の航空機が航空交通管制又は追跡を目的として測定され、或いは海上において船舶が位置追跡を目的として測定されるレーダシステムが存在する。但し、これらのシステムも、使用されるレーダ波周波数が低く、これが低い方位分解能の原因となり、更に信号の飛行時間が長いために、その使用はこれらのケースにのみ限定され、実際それ以上の応用は生じなかった。
【0019】
従って、現在の距離像生成技術水準は不十分であると位置付けることができる。
【0020】
これに関連して、従来の技術につき、距離測定の方法及び装置に関する欧州特許出願EP 1 522 870(以下、KEMと称する)を参照されたい。本発明はKEMに記載された方式を少なくとも部分的に使用する。繰返しを避けるため、ここで、KEM方式に関するEP 1 522 870の開示内容を引証することとし、本引証によりEP 1 522 870の開示内容は本出願に含まれる。
【特許文献1】EP 1 522 870
【発明の開示】
【発明が解決しようとする課題】
【0021】
本発明の目的は、従来の技術による目下の撮像用パルスTOFセンサの前記短所を克服する可能性を示すことである。特に、感度の顕著な上昇を達成するための労力の資材・時間面での合理化、2D及び3D距離撮像の測定速度向上、各々の距離画素におけるパルスTOFセンサの性能ケイパビリティの実現、範囲の増大及び、距離に左右されないエラーの回避が達成されなければならない。
【課題を解決するための手段】
【0022】
前記目的は独立した方法請求項1記載の特徴及び独立した装置請求項34記載の特徴によって達成される。
【0023】
本発明の好ましい実施形態は従属請求項に述べられており、その内容は本引証により本願説明に含まれる。
【0024】
本発明は一般にかつ特に好ましい実施態様において、就中、下記機能を可能にする。
・適切な時間測定回路、並列配置された複数の時間測定チャネルにおける複数のレーザのスタートパルス及び複数の受信器の信号及びノイズパルスの並列処理により、測定速度を著しく高めること。
・適切な時間測定回路、送信アレイ及び受信アレイにより、並列時間測定チャネルにおける並列/逐次時間測定による、可動部品(鏡スキャナ)なしでの2D距離撮像を行うこと。
・適切な時間測定回路、送信アレイ及び受信アレイにより、並列時間測定チャネルにおける並列/逐次時間測定による、単一の鏡スキャナでの3D距離撮像を行うこと。
・総じて、2D及び3D距離撮像における十分な速度及び感度を達成すること。
・適切な時間測定回路により、各々の時間測定チャネルにおいて、TOFの間に生ずる例えばスタートパルス、エコー及びノイズパルス等の多数のパルスの測定を行うこと。ノイズパルスは受信増幅器の後に接続された比較器(4)の比較閾値(5)が低く選択されると不可避的に発生し、また、測定値の適切な加算平均により4.5NEPを大幅に下回る感度を達成するために測定されなければならない。
・例えば、雨、雪、霧及び汚れた境界板による反射も多数の目標物からの反射もいずれも各々の時間測定チャネルにおいて評価し得るようにするため、つまり、不良な気象条件下での外部測定を可能にし、或いはまたこれらの問題を計測によって検出するために、TOFの間に多数のエコーパルスの処理を行うこと。
・範囲を向上させるため、(ノイズパルスが存在する場合)同時的な感度上昇により多数のエコーパルスを測定すること、つまり、多数の時間測定チャネルにおいて同時に多数のエコーパルスと多数のノイズパルスを測定すること。
・時間測定チャネル・アレイにおける多数の信号の並列処理により鏡スキャナの機械負荷を低減させること。
・偏向ユニット及び移動キャリアとの組み合わせにより、周囲環境の大量の距離撮像を行なうこと。
【0025】
パルスTOF法で作動するセンサの前記性能ケイパビリティは本発明によりあらゆる距離像点で実現される。前記パルスTOF法の利点は距離撮像には不適な多数の単純なセンサですでに具体的に例示されてきた。
【0026】
画素ごとの光が電荷に変換され、該電荷は時間期間全体にわたって集積され、次いで逐次に読み出される、つまり、使用される光は事前に生成される必要はなく、技術的には1パス(受信)が供されるだけでよい例えば2台のCCDカメラによる立体撮像に比較した場合、前記パルスTOF法による距離撮像の本質的な難題は、この場合、最初に電磁有向ビーム又は部分ビームが距離画素ごとに生成され、次いで、その画素ごとのTOFが測定されなければならないこと、つまり、技術的観点からは2パスが供されなければならない点にある。従って、画素ごとの労力は基本的に遥かに高い。但し、前記パルスTOF法の重要な利点が存在する。
【0027】
前記パルスの前記TOFはCCDカメラによる前記集積時間に比較して基本的に短く、これは基本的に短い測定時間に対応する。前記集積時間はまた、強力な光パルスが送信され、単一パルスの前記集積時間が前記TOFの範囲内にあるCCD距離カメラによる複数の繰返し測定のために、拡大されなければならない。複数の距離像点を並列撮像するための距離測定チャネル・アレイの好適な多重活用により、前記パルスTOF法による短い測定時間は、各々の距離画素に距離測定チャネルは供されないが、このアレイが多数の距離画素グループのために何度も逐次的に使用され、前記距離画素グループから距離像が集成されるようにして、使用することができる。このアプローチは、限定されたアレイと多重使用のための手段とがなお可用化されなければならないために、CCDチップよりもなおコスト高であるが、前記パルスTOF法による距離測定チャネルの前記性能ケイパビリティがその利点と共に各々の距離測定点で得られることになる。前記パルスTOFセンサの性能特徴を有する距離測定チャネル・アレイと距離撮像のための多重使用手段とは本発明により可能とされ、これにより、以下にもっと詳細に述べる新たな用途が経済的な技術態様で実現可能になる。
【0028】
パルスTOF測定チャネルの感度はすでに上述した公知のKEM方式で著しく高めることができると同時に、更に、上述した演算労力が回避される。本発明は、時間測定チャネルを含む高度集積時間測定ICにより、多数の並列/逐次信号入力の存在時の大量の並列処理によって一般に前記測定速度を著しく高めることのできる装置を可能にする。ここで、距離撮像を高速、正確、広範囲かつ高い方位/距離分解能で行うことができると共に外部使用に適した装置を得るために、適切な送信/受信アレイ及びそれらの組み合わせによってどれだけの信号が形成されなければならないか、送信/受信アレイは多数の時間測定チャネルを含む時間測定IC、偏向ユニット及びキャリアとどのように組み合わせることができるかについて述べることとする。
【0029】
本発明により、特に、
・多数の並列信号を当該スタートパルスと共に供給するアレイ配置された適切かつ効率的な送信器及び受信器と、
・多数の調整可能な測定モードで測定評価を行う多くの時間測定チャネルを含む革新的な時間測定回路
との組み合わせが実現される。
【0030】
前記総時間測定回路は好ましくは、例えばCMOSによる集積されたICとして製造される。こうして、2D距離像は鏡スキャナなしで撮像可能であり、3D距離像は適切な単一の鏡スキャナで撮像可能である。使用される前記時間測定法は前記のKEM方式をベースとすることができる。本発明により、革新的な回路、モジュール及び要素配置そして、本発明の対象でもあるモジュールによって、この公知の時間測定法を実現することが可能である。
【0031】
以下、本発明の考えられ得る態様を説明する。
【0032】
本発明による前記時間測定ICにより以下を実現することができる。つまり、多数の時間測定チャネルにおいて、多数のパルスの前記それぞれのTOFが、同じスタートパルス又は異なるスタートパルス及び当該信号と共に、互いに独立に並列測定される。処理されるべき信号は、前記アナログ信号(6)が前もって比較器(4)を経て誘導されるか又は前記時間測定ICの入力バッファにより論理信号に変換(デジタル化)されることによって生ずる減衰アナログ信号又は減衰デジタル信号である。各々のスタートパルスは1線上で当該信号パルスと組み合わされてパルスチェーンを形成し、前記スタートパルス周囲のノイズは抑制される。処理されるべき1パルスチェーンは時間測定チャネルごとに結果する。このパルスチェーンの全てのパルスのアップ事象(パルススタート)及びダウン事象(パルスエンド)が前記最初のスタートパルス(第1パルス)直前の時点から出発して測定される。処理されるべきパルスはスタートパルスかエコー又はノイズパルスであってよい。こうして、パルスチェーンの情報は各々のパルスの2事象(アップ及びダウン事象)に還元される。処理されるべき情報の範囲は、既存のパルスTOFセンサによる情報の範囲に比較して、処理されるべき前記パルスの数に比例して高まるが、前記GHzレベルのサンプリングレートでアナログ/デジタル変換されたパルスチェーンを使用するセンサよりも遥かに小さい。
【0033】
時間測定は一般に2部分測定によって行われる。
1.測定スタートから各々の事象まで、時間尺度として外部から供給される正確な測定クロック信号の正又は負のフランクのカウント。
2.発生する部分期間(TP)のパルス幅の測定。
【0034】
前記スタートパルス直前に設定された前記スタート時点から、前記パルスチェーンの全てのパルスの全ての事象の後に到来する前記測定クロックの最初の正のフランクまでの測定クロックの正又は負のフランクの数が前記第1の部分測定でカウントされる。前記測定クロック・フランクのためのカウンタの幅は前記TOFが明白にカウントできるように選択される。但し、もし前記カウンタの幅が例えば8ビットに制限されれば、255フランクまでしか明白にカウントできないため、当該メモリ領域においてカウンタのオーバフローをマーク付けすることにより、より長い時間範囲にわたって明白性が確立される。こうして、ほぼ任意の所望の長さの測定範囲を実現することができる。
【0035】
前記パルスチェーンの各々のパルスの前記スタート時に過大にカウントされたTPパルスの前記パルス幅とエンド時に過大にカウントされたTPパルスのパルス幅は、前記第2の部分測定を使用して計測によって検出される。
【0036】
従って、前記アップ事象の部分期間の前記パルス幅と前記ダウン事象の前記パルス幅も常に差し引かれなければならない。前記パルスチェーンの前記パルスは前記測定クロック信号とは非同期であるため、前記TPは任意のパルス幅を有し、前記測定クロックの期間は上限である。前記TPは、例えばTDCにより、前記TDCの遅延素子の遅延時間の倍数としてのデジタル値に変換される。これにより、前記第1の部分測定の前記時間測定の分解能は、遅延時間例えば50psへの前記第2の部分測定の加算によって、10〜20GHzの仮想測定クロックに対応する100psに増分される。前記遅延時間の数によって除された前記測定クロックの期間は、好ましくは、僅かな温度依存性のために、前記プロセッサシステムにおいて前記測定間に絶えず再キャリブレーションされる遅延時間を与える。
【0037】
再トリガ可能な又は連続的測定を行う回路部品は、比較器閾値が低く選択された場合に多数のパルス(スタートパルス、エコーパルス及びノイズパルス)を処理する双方の部分測定のための各々の時間測定チャネルに設けられる。全ての事象はそれぞれ、前記2測定後に2測定値として存在している。前記第1のスタートパルスに関係する全てのパルスのTOFはパルスチェーンの全てのパルスの各々の事象から前記スタートパルス・アップ事象を差し引くことによって与えられる。ノイズが発生せずに、エコーパルスのみが生ずる場合(基準(5)>4.5NEPによる特別なケース)には、前記測定結果は一般に、多数の時間測定チャネルの本発明による並列処理と前記マルチエコー評価とを無視すれば、上述した現在使用可能な前記パルスTOFセンサで達成される前記結果と同じである。
【0038】
本発明の態様において、電子回路の処理速度並びに回路規模が有限であるために、但しまた特別なケースにおける一般的な理由からしても考慮されなければならない幾つかの一般的な対策を講ずることができる。
【0039】
測定されるべき前記パルスが前記測定クロック(中央クロック)の期間よりも短ければ、前記アップ事象とダウン事象の前記TPパルスが時間的にオーバラップすることがある。双方のパルスを測定し得るようにするため、時間測定チャネルごとに、一般に、前記アップ事象とダウン事象のために2TDCが存在し、前記測定クロック・フランクのカウントのために2カウンタが存在する。これにより、前記時間測定チャネルは一般に、前記アップ事象を処理するためのブランチと前記ダウン事象を処理するためのブランチに分割され、これらの前記2ブランチは同じ構造を有する。
【0040】
更に、前記TDCはそれぞれ、少なくとも1事象の前記時間測定結果が保全されるまで、ブロックされる。ノイズパルス又はエコーパルスも、前記比較器閾値の位置が低ければ、互いに時間的に密に続くことがあり、これは前記事象測定にとっての特別な難題を表している。TPパルスは、それが処理される前に、少なくとも測定クロック期間(+更なるゲート処理時間)の間前記TDC内にあり、従って、爾後のパルスのための入力はブロックされなければならないことから、密な配列の前記ノイズ又はエコーパルスにつき、パルスチェーンの前記パルスを「パルススイッチ」として公知の回路部品によって複数のチャネルに交互に向けることが必要であり、これにより、パルスの処理可能平均配列頻度はチャネルの数に比例して増大する。こうした背景に鑑み、高密度のパルスが前記パルスチェーン中に存在することはいかなる用途においても想定されないため、種々相違した測定モードを導入することができる。
【0041】
従って、本発明の考えられ得る1実施形態において、パルスチェーンは1パルススイッチで、並列配置された1つ又は2つ又は4個の時間測定チャネルに対応する測定モードで制御されることが行われる。このため、A、B、C及びDと命名された4測定チャネルが設けられて、これらの4測定チャネルが組み合わされて、「サブアレイ要素」(31)(図8及び9も参照のこと)と称される前記時間測定ICにおいて1グループとされる。パルスチェーンの処理可能パルスの間隔はこの処置により2分の1又は4分の1に減少させることができる(特別な実施形態において、例えばほぼ3nsに低下)。4個の時間測定チャネルで、総計8TDCと8カウンタが存在する。
【0042】
前記測定クロックは、前記センサでの前記距離測定にとって信頼し得る正確な目盛を有する十分な温度安定性を具えた要素として選択される。前記遅延時間は温度依存的であることから、前記TDC内に存在する遅延時間の前記測定クロックの期間は遅延素子によってキャリブレーションされる。こうして、前記遅延時間の数によって除された測定クロックの期間は前記遅延時間となる。このキャリブレーションは、不断に生成する部分測定値にアクセスして、それらを適切に評価する前記装置のマイクロプロセッサシステムの前記評価プログラムのパートプログラムで完全に行うことができる。
【0043】
更に、1又は複数のパルスチェーンのデータが記憶され、同所か前記データが測定後に前記マイクロプロセッサシステムに転送される別個のメモリ領域(26)が特に全ての時間測定チャネルのために設けられる(図8も参照のこと)。このメモリ領域は好ましくは線で編成され、前記メモリ中の1本の線はパルスチェーンの各々のパルスに対応している。1測定の前記線の情報内容は事象リストと称される。前記線の数は、比較器基準0V時の最大値として所要の、前記TOF中のパルスチェーンのパルスの数に依拠しており(この基準はノイズの平均値に等しく、これは最大感度上昇に対応し)、150MHzの受信器の帯域幅で平均してほぼ0.02パルス/nsが生じ、つまり、ノイズパルスの平均周波数はほぼ50MHzに達する。これにとって十分と思われる選択は時間測定チャネル当たり128本の線である。従って、パルスチェーンのパルスが4個の時間測定チャネルに逐次に分配される測定モードにおいて、総計512本の線が使用可能である。上述した50MHzの平均ノイズパルス密度で、512本の線はほぼ10マイクロ秒のTOFに対応すると考えられ、これは1.5kmの目標物距離に対応する。この作動範囲は、単一の時間測定チャネルしか使用しない場合には、なお375mに低下するであろう。
【0044】
本発明の考えられ得る更に別の1実施形態において、n×4並列時間測定チャネルをnサブアレイ要素(31)として前記時間測定IC(32)に組み込むことができる。前記サブアレイ要素のこれらの4チャネルはまた、選択可能な測定モードによって制御される当該測定モードで、独立した4又は2又は1測定を互いに独立に処理することもできる。前記測定モードは外部制御信号によって起動される。各々のチャネルは独立した信号入力を有し、独立した測定を実施することもできる。前記測定モードは1チャネルモード、2チャネルモード及び4チャネルモードと称され、当該2チャネル及び当該4チャネルモードは直列処理と並列処理の双方に適している。前記直列処理は高い時間ノイズパルス密度又は長い測定時間によって選択され、他方、前記並列処理は低い時間ノイズパルス密度及び短い測定時間によって選択される。更に別の測定モードにおいて、分解能の向上を複数の前記時間測定チャネルにおいて同じ入力信号で、時間測定チャネルにおいて90°及び/又は180°位相変位された測定クロック信号が使用され、前記チャネルの結果が続いて加算平均されるようにして、達成することができる。
【0045】
前記送信/受信アレイの使用によって前もって大幅に加速された距離撮像により、これらの可能性は、(i)繰返し測定又は区別可能な距離画素のための並列時間測定チャネルの使用によって、前記距離測定の精度又は感度を高め、及び/又は、(ii)画素のパルスチェーンの前記パルスを逐次に供給(分配)する並列時間測定チャネルの使用により、あらゆる画素においてほぼ任意の所望の数のエコーで、前記検出可能な多重エコーパルス密度をほぼ50cmの最小パルス間隔まで高める。両者はまた速度向上の一部を減殺するが、上述した計測上の改善をもたらす。
【0046】
上述した特徴を有する本発明による前記時間測定ICの考えられ得る前記態様は複数の単一測定が1単一測定(以下、「バースト測定」とも称される)として処理されることを可能にし、これにより、更なる速度向上が達成される。これに関連して、前記時間測定ICの前記メモリ領域でマーク付けによってそれぞれマーク付けされた複数のスタートパルスが生ずる。こうして、前記時間測定チャネルのメモリ中の前記情報と個別測定との対応付けが前記スタートパルス・マーク付けによって保証され、前記バースト測定の個別測定値は容易かつ速やかに加算平均されて、例えば感度の向上が達成される。前記バースト測定内の個別測定は一般に非常に高速で順次に実施されることから、前記バースト測定は、多数の信号グループがマルチプレクサで逐次に前記時間測定ICに切り換えられる、前記時間測定ICによる感度向上に特に好適であり、或いは、前記距離プロファイル撮像のための送信/視覚空間角は確かに連続的に偏向されるが、バースト測定のごく短い時間からすれば前記平均的な個別測定にとっては遊んでいるも同然であるとは決していうことのできない偏向ユニットを装備した装置にとって特に好適である。
【0047】
全ての時間測定チャネルの事象リストは、例えば32ビット幅のインタフェースを経て、前記プロセッサシステムの前記個別測定間又は前記バースト測定間の中断時間に読み出されることができる。前記異なる測定モードに従った前記事象リストの順序付け及びバースト測定内の個別測定の整列は後置された前記プロセッサシステム(28)で行われる。
【0048】
既述したように、本発明は現在に至るまで実現不能であった用途を可能にする。距離撮像のための装置の用途は極めて広く、この上なく多様な需要を含んでいる。本発明により、連続距離撮像のための十分に高速、正確、高感度かつ堅牢な装置が可用化され、これにより、相当な市場を有する多数の応用分野にまたがる用途が切り開かれる。以下のリストは考えられ得る応用例を概観したものである。
・例えば、監視、物体測定、及び、例えば自動車駐車場、航空機離着陸場、コンテナターミナルの保管エリア、鉄道線路、屋内及び屋外の集合場所、エレベータ、ケーブルカー及びそれらのためのロビー、自動ドア/ゲートのドア開閉、建築現場及び事故現場などの専用監視のための定点からの静距離撮像。
・アプローチゾーン及び直近運動ゾーンにおける障害物の警戒、人の視覚に代わる又は補完する自律車両誘導、例えばクレーンによる荷役、ナビゲーションシステムのための目標物の高速測定、路面測定、航空機及び車両からの地形測定及び都市計測、動距離像として評価するための作業プラントの作業域撮像等における、例えば物体検出、測定及び3D表面測定のための、乗用車、トラック、クレーン、鉄道、ヘリコプタ及び航空機からの動距離撮像。
・航空機離着陸場、コンテナターミナル、船舶及び航空機のドッキング、競技場、安全ゾーン、安全監視ゾーン例えば施錠ゾーン、横断ゾーン、鉄道踏み切り及びエスカレータにおける動距離撮像による運動監視。
・交通モニタリング、車両、並びに、人及び動物などにおける動距離撮像による物体計数。
・トンネル、鉱山及び鉱山坑道における動距離撮像による露出側面の監視。
・開いた地形、都市及び道路等の形態が静/動距離撮像によって検出される測地測量。
【0049】
これらの用途において、本発明によって実現可能な前記距離像により、目下達成不能な利点を生み出すことができる。前記例示による列挙は、重要な用途は戸外分野にあり、従って、動距離プロファイル又は動距離像を必要とすることを示している。こうした理由から、距離撮像のために設けられる前記センサは自然環境に対する耐性を有し、不都合な気象・汚濁条件下でも信頼度の高い測定値を供すると共に、十分な動特性を有していなければならない。本発明によって実現することができるのはまさにこのことである。
【発明を実施するための最良の形態】
【0050】
以下、図面を参照しつつ、実施例によって本発明を説明する。
【0051】
以下の図(1)〜(6)には、パルスTOF測定を使用した距離撮像装置のための送信/受信アレイの実施形態が示されている。短レーザパルスがパルス電磁波として使用され、送信素子(10)例えば半導体レーザダイオードと受信素子(2)例えばAPD(アバランシェフォトダイオード)が設けられている。これはおそらく実際に最も普及している実施形態であることから、一般に本発明の1実施例としてのみ理解されるべきこの実施態様は本発明の更にその他の実施形態の更なる説明にも使用される。
【0052】
図1は、目標物から反射され、電磁波集束系(48)(図12a、21〜23参照)としての受信レンズを経て受信された光パルス(1)を電気信号に変換するAPD(2)と、それに続く広帯域増幅器(3)と、調整可能な基準(5)との比較器(4)と、デジタル化された出力信号(7)とを含む受信器の基本構造を示している。
【0053】
受信器の要素は集成されて、図2において、受信モジュール(8)を形成している。モジュール(8)はデジタル化された出力信号(7)と基準(5)とを有する。
【0054】
図3において、図2に示した受信モジュール(8)は集成されて受信アレイ(9)を形成し、時間測定チャネルのための入力信号(7)を供給する。1レーザ(10)からの1レーザビーム(14)しか存在しなければ、反射された光パルス(1)の部分光線が受信アレイ(9)によって検出される。複数のレーザ(10)が多くのレーザビームを送信する場合には、受信アレイ(9)の部分アレイがそれぞれ1レーザのビームを検出する。受信アレイ(9)の全てのアレイ要素は各々の比較器(4)のための基準入力を有する。
【0055】
図4は、光レーザパルス(14)を発生させるレーザダイオード(10)によるパルスレーザの基本構造を示している。電流パルサ(11)はダイオード(10)の動作のために設けられており、これにより、レーザダイオードの光パルス発生のための電流パルスが生み出される。電流パルスは信号(12)によってトリガされ、更に、センサとしての小コイルにより例えば非接触式にスタートパルス(13)に変換される。
【0056】
図5において、レーザの要素は集成されてレーザモジュール(15)を形成し、トリガ信号(12)及びスタート信号(13)と共に示されている。
【0057】
図6において、図(5)のレーザモジュール(15)は集成されてレーザアレイ(16a)を形成し、全ての光レーザパルス(14)を、反射されたレーザパルスが受信アレイ(9)の視角空間角内で検出される送信空間角アレイとして供給する。全てのレーザは回線(12)を経てそれぞれトリガされることができ、レーザごとに1スタートパルス(13)が供給される。
【0058】
受信アレイ(9)と、レーザアレイ(16)と、ここには図示しない当該光学系との配置によって、スタートパルスと信号が発生させられ、それからパルスチェーンが生成されて、パルスTOF測定による高速距離撮像のための本発明による時間測定器を表す時間測定ICによって処理される。
【0059】
これに関連して、異なる実施形態において、レーザビームが受信アレイ(9)の一群の受信器によって検出されるときに、対応する信号パルス(7)と並列処理されるべき2スタートパルス(13)が生ずることがあり、かくて、これらは全て並列された時間測定チャネルで処理され、レーザビーム(1)が並列配置された受信アレイ(9)の受信器(8)のグループによって逐次に検出されるときに、対応する信号パルスと直列処理されるべきスタートパルスが生じることがあり、かくて、これらはマルチプレクサ(18、19)(図7、8参照)により同一セットの時間測定チャネルに供給されるか又は−十分な時間測定チャネルが存在すれば−全て並列処理されることが可能である。グループ内の有利な受信器数はサブアレイの測定チャネル数とまったく同じである。
【0060】
この時間測定ICのサブアレイ要素が最低限含んでいる基本装備された回路部品は図(7)に示されている。回路部品の基本タスクは下記リストに示した通りである。
【0061】
(20)入力ミクサ
入力ミクサのジョブは以下の通りである。
・集積された時間測定ICとして構成されていてよい時間測定回路への入力信号(スタートパルス及び信号)の制御及び誘導。
・スタートパルスと対応する信号とを加算してパルスチェーンを形成すること。
・信号及びノイズの近接場抑制のための、測定スタートから出発してスタートパルスエンド後までの設定可能時間における、エコー及びノイズパルスからのスタートパルスの解放。
・所望のTOF後の入力ブロック。
【0062】
(21)パルススイッチ
パルススイッチのジョブは以下の通りである。
・並列又は直列による1又は複数の時間測定チャネルへのパルスチェーンのパルスの分配。
・複数の時間測定チャネルへの同一又は異なる位相の測定クロック信号の分配。
【0063】
(30)クロックユニット(中央クロック)
クロックユニットのジョブは以下の通りである。
・時間測定チャネルのための外部精密クロックからの測定クロック信号の準備。
・全ての時間測定チャネルに応じた位相の異なる測定クロック信号の発生。
・使用されないか又は中断時間中の時間測定チャネルにおける、制御入力による電力消費の低減。
【0064】
(22)TPセパレータ
TPセパレータのジョブは全ての時間測定チャネルにおいてTPパルスを発生させることである(TP=部分期間)。
【0065】
(24)遅延アレイ
遅延アレイのジョブは遅延時間に各々の時間測定チャネルのパルスチェーンの各々のパルスの異なる2TPパルスを測定することである。
【0066】
(25)デコーダ
デコーダのジョブは遅延アレイの2出力情報を2進コード化情報に具体化することである。この情報は、情報「スタートパルス」が加えられるラッチアレイの時間測定チャネルごとに用意される。
【0067】
(23)カウンタ
カウンタのジョブは、測定クロックの期間の分解能で全ての事象を測定し、オーバフローをラッチアレイに取り込むことである。チャネルごとに2カウンタが存在する。
【0068】
(17)測定プロシージャ制御
測定プロシージャ制御のジョブは測定の枠組みを制御することである。これは以下を含んでいる。
1.個別測定の制御。
2.バースト測定の制御。
3.レーザモジュールの動作開始。
4.スキャナ角度信号(もしあれば)の処理。
5.受信信号及びスタートパルスのためのマルチプレクサ(もしあれば)の制御。
6.節電制御、しかも
実際に外部静的制御信号を使用する間の節電制御、つまり
1.測定モード選択信号の制御。
2.近接場ミューティングの制御。
3.測定終了制御(所望のTOFへの制限)。
【0069】
(29)時間測定制御
時間測定制御のジョブは、選択された測定モードの結果としての静印加制御信号及び動的に変化するリセット信号に従って時間測定チャネルにおける時間測定を制御することである。時間測定制御により以下のプロセスが制御される。
4.TPパルスの発生。
5.TPパルス幅のデジタル化及び記憶のための可用化。
6.カウント値の発生及び記憶のための可用化。
7.2進変換されたTP及び部分測定値としてのカウント値の記憶。
8.測定モードに応じた、部分測定値からのパルスチェーンのパルスごとのメモリ線の形成(「事象リスト」と称される)。
9.スタートパルスのマーク付け。
10.オーバフローのマーク付け。
11.記憶の制御。
【0070】
(26)メモリ
オーバフロー及びスタートパルスのマーク付けを含む、全ての事象の全ての部分結果はメモリに記憶される。
【0071】
(27)インタフェース
インタフェースのジョブは、プロセッサシステムによって制御されたメモリ中の情報を外部に転送することである。
【0072】
図7の基本ブロック図は、上述したジョブを遂行する、信号(7)、(13)によって示したように4個の時間測定チャネル(その他の任意の数の時間測定チャネルも同じく可能である)を有する、本発明によるサブアレイ要素の、考えられ得る1個の時間測定ICを示したものである。
【0073】
以下、時間測定器の回路部の機能を説明する。
【0074】
入力信号は全てのスタートパルス(13)及び全てのデジタル化信号(7)である。グループ受信器及び当該スタートパルスの選択は、マルチプレクサ(18)、(19)に作用する測定プロシージャ制御(17)の制御回線によって行われる。レーザは全てのトリガ回線(12)によって逐次に起動される。マルチプレクサ(18)は通し連結されたスタートパルス(13)を、マルチプレクサ(19)は通し連結された当該信号(7)をそれぞれ入力ミクサ(20)に供給する。信号(7)はスタートパルス後の時点まで時間的に抑制されて、スタートパルスが時間的に正しくこのギャップに加えられ、こうして、既述したスタートパルス及びエコーパルス、ノイズパルスのパルスチェーンが生ずる。これにより、時間測定結果の品質を作為的に低下させると考えられるノイズパルスによるスタートパルスのひずみが確実に回避される。近接場抑制信号は測定プロシージャ制御(17)から供給される。
【0075】
入力ミクサ(20)の出力信号はパルススイッチ(21)に供給され、同所において、測定されるべき通し連結されたパルスチェーンは入力ミクサ(20)を通過した後、並列又は直列に2−又は4個の時間測定チャネルに分配される。
【0076】
パルススイッチ(21)の出力信号はTPセパレータ(22)に供給され、同所において、時間測定回路の全てのブランチのためのパルスとして部分期間が導出される。TPパルスは、使用される測定クロック信号のそれぞれ後続の正のフランクまでのパルスの正及び負のフランクで形成される。従って、各々の時間測定チャネルのために2TPセパレータが存在する。これに関連して、すでにパルススイッチ(21)を通過したパルスが使用される。
【0077】
部分期間TPは以下、特に、図9に関連して再び詳しく述べられる。
【0078】
TPセパレータ(22)のTPパルスは遅延アレイ(24)に供給されて、同所で、遅延素子の遅延時間の倍数として測定される。各々の時間測定チャネルのために2遅延アレイが設けられ、実際に、正のパルスフランクのために1遅延アレイが、負のパルスフランクのために1遅延アレイが設けられている。TPパルスは遅延アレイ(24)に入り込む前に回路技法により拡張(オフセット)されるため、ゼロとは異なる値をもつ非常に短いTPパルスも測定可能である。
【0079】
TPパルスは遅延アレイの遅延素子によって遅延させられ、互いに比較されて、遅延パルスがなお出力パルスとオーバラップしているか否かの情報がラッチに記憶される。情報の保全は例えば80素子を有するラッチアレイで行われる。2TPパルスに対応して、チャネルごとに2遅延アレイが設けられている。これにより、時間測定の分解能は遅延時間へ高められる。測定値は、静止状態とは異なる論理値により、80本の線で示される。最大遅延数は遅延時間に変換された測定クロックの期間+オフセットに一致している。
【0080】
遅延時間のTPパルス幅はデコーダ(25)で2進数に変換され、ラッチアレイにおいてチャネルごとに可用化される。スタートパルスであるとの情報は更に同様にラッチに記憶される。
【0081】
4位相角0°、90°、180°及び270°の4測定クロック信号がクロックユニット(30)で発生させられる。
【0082】
全ての事象はカウンタ(23)において、当該パルスフランクに続く測定クロックの正のフランクでカウントが読み出され、カウンタのオーバフローが同様にして検出されるようにして、測定クロックの期間の分解能で測定される。時間測定チャネルごとに2カウンタが存在している。
【0083】
一方でカウント、他方でTPパルス幅の2進値を含む全ての事象の部分結果並びにオプショナルに存在するオーバフロー・マーク付け及びスタートパルス・マーク付けも同様に各々の時間測定チャネルのメモリ(26)に記憶される。部分結果が発生させられて、正しい時間にラッチへの記憶のために可用化され、メモリに記憶され、次いで、測定されるべき機能ブロックが次の測定のために切換解除されることが時間測定制御(29)によって保証される。
【0084】
測定の終了後、メモリ内容はマイクロプロセッサシステム(28)によって制御されるインタフェース(27)を介して読み出され、評価ソフトウェアを使用して処理されて距離に変えられる。
【0085】
回路部品である、入力ミクサ(20)、パルススイッチ(21)、TPセパレータ(22)、遅延アレイ(24)、デコーダ(25)、カウンタ(23)、インタフェース(27)及び時間測定制御(29)は好ましくは時間測定ICへの統合に好適である。時間測定ICへの統合にあまり適していないかもしくは不適なのは、レーザアレイ及び受信アレイ(9、16)、測定クロック(33)及び、マルチプレクサ(18、19)を含む測定プロシージャ制御(17)であるが、それはこれらの機能ブロックが適応に関連した変化を受けやすく或いは技術的に不均一だからである。
【0086】
図8aは図7と同じ態様の1実施例を示しており、この態様において、時間測定回路は集積された時間測定ICとしての4個の時間測定チャネルを含むサブアレイ要素(31)として構成されている。レーザアレイ(16)のレーザモジュールは測定プロシージャ制御を使用して全トリガ回線(12)を経て直列制御される。所望の最大TOFは後続するレーザモジュールの各々のトリガの前に待機されなければならない。受信器(7)の出力数は4の倍数として選択されるため、マルチプレクサ(19)でその出力(7a)は逐次に時間測定IC(32)に向けて切換えられることができる。各々のレーザビームは受信アレイ(9)の4受信器(8)によって検出される。当該スタートパルスは、切換えられた受信器又はマルチプレクサ出力(7a)に同期して、マルチプレクサ(18)によりスタートパルス(13)としてサブアレイ(31)に向けて切換えられる。
【0087】
図8bは、時間測定回路が、集積された時間測定IC(32)の形の、それぞれ図(8a)と同じ4個の時間測定チャネルを有したサブアレイ要素(31)のアレイとして構成されている1実施例を示したものである。この実施形態において、レーザアレイ(16)の全てのレーザモジュール(10)は並列にトリガされ、受信アレイ(9)の全ての受信モジュール(8)のためにそれぞれ1測定チャネルが存在しているために、測定速度は最適化される。2D距離像(プロファイル)は、鏡スキャナなしで、図(8a)及び図(8b)に示した態様の装置を用いて撮像することができる。この装置構成は単一の鏡スキャナによって3D画像撮像装置に拡大することができる。
【0088】
図8cは特に、既述したKEM方式の原理並びに上述した部分期間(TP)の説明に資するものである。
【0089】
スタートパルス(73)及びアナログエコー信号(75)は処理されるべき信号に属し、アナログエコー信号は(6)(図1参照)で示した受信ノイズ(76)と共にアナログ受信信号(77)を形成する。アナログ受信信号(77)は基準(5)との比較器(4)によりデジタル受信パルスに変換されて、スタートパルス周囲の近接場のアナログ信号を抑制するために信号(74)でマスクされ、これによって結果信号(79)が生み出されるか又は、測定ゾーンを遠隔ゾーンに変位させるためにマスクされる。スタートパルス(73)と結果信号(79)とは時間的に正しく組み合わされてパルスチェーン(80)を形成する。結果信号(79)又はパルスチェーン(80)の正のフランク(81)は測定されるべきアップ事象であり、負のフランク(82)は測定されるべきダウン事象である(dw=down)。測定クロック信号(83)は測定のために使用される。
【0090】
アップ事象(81)に属するカウント数は測定クロックの期間の経過数であり、菱形(86)によって示されている。アップ事象の部分期間(upTP)は垂直陰影線の付されたパルス(85)である。従って、アップ事象の時点はそれぞれに対応する部分期間(85)を除いたカウント数(86)によって形成される。ダウン事象(82)に属するカウント数は測定クロックの期間の経過数であり、短矢印(89)によって示されている。ダウン事象(82)(dwTP)の部分期間は垂直陰影線の付されたパルス(88)である。従って、ダウン事象(82)の時点はそれぞれに対応する部分期間(88)を除いたカウント数(89)によって形成される。従って、パルスチェーン(80)のアップ事象(81)の時点は測定値(85)と(86)によって示され、ダウン事象(82)の時点は測定値(88)と(89)によって示される。
【0091】
TPはTDCによってデジタル化されて、遅延時間の倍数として表される。カウント数は測定クロックの期間に含まれた遅延時間の数によって増倍される。こうして、全ての値は遅延時間とカウント数の倍数として存在し、TP幅は組み合わさって1つの数を形成することができる。可能最高値は遅延時間の倍数としての最大TOFである。もし、例えばそれぞれ遅延時間が100psに、最大TOFが1000nsに達すれば、生じ得る事象の最大値は10,000に達する。時間パターンメモリの1メモリセルは1から10.000までの値のそれぞれに対応している。但し、時間パターンメモリの設計は、基準(5)がノイズ(76)の4.5NEP未満の場合に必要であるにすぎない。もしも測定クロックの期間自体が遅延時間として使用されるとすれば、粗い時間パターンメモリが生ずる。5nsの期間で、粗い時間パターンメモリは200のメモリセルしかもたない。精度及び演算労力はパルスチェーン(80)の平均時のメモリポジションの数に応じて低下し、事実、この実施例システムにおいて50分の1に低下する。
【0092】
アップTP(85)とダウンTP(88)とは、信号(84)(アップTP信号)と(87)(ダウンTP信号)の点(90)で示されているように、オーバラップすることがある。こうした理由から、1個の時間測定チャネル内に、アップ事象の測定のために1ブランチが、ダウン事象の測定のために1ブランチがそれぞれ設けられる。更に、点(91)で示されているように、パルスチェーン(80)の連続した2パルスの連続したアップないしダウンTPがオーバラップすることがある。こうした理由から、パルスが複数の時間測定チャネルに直列に分配される、いわゆる「直列測定モード」が設けられる。パルスチェーン(80)のパルスの分配はパルススイッチ(21)によって行われる。
【0093】
[プロセッサシステムのパートプログラム]
測定のプロシージャを保証するのみのプログラムパーツは説明されない。
プロセッサシステムの評価は時間測定IC(32)の各々の時間測定チャネルのメモリの事象リストからの読出しとプロセッサシステム(28)のメモリ領域への読み込みを制御し、事象リストから設定測定モードに従って距離値を計算する。
【0094】
そのため、時間測定システムのキャリブレーションが行われる。測定クロックが絶対基準とされ、そのため、エラーなしと見なされる。パートプログラムにおいて、期間はTPパルスのパルス幅の部分測定結果から遅延時間の倍数として計算され、それから絶対遅延時間が決定される。結果はどれだけの遅延時間が測定クロックの1期間に相当するかを示す係数である。
【0095】
更に別のパートプログラムにおいて、全てのカウント値は前記係数で増倍される。TPパルスの2進変換されたパルス幅は、今や、カウント値と組み合わされて、1つの数を形成することができる。これらの値は遅延時間に測定された事象である。任意に定められた測定スタートからスタートパルスまでの時間がカウントされた事象を関係付けるため、スタートパルス・アップ事象の値がパートプログラムの全ての事象から差し引かれる。こうして、全ての事象は、スタートパルス事象からカウントされて、2進数としてキャリブレーションされた目盛りで、プロセッサシステムのメモリにリストとして存在している。
【0096】
測定値を加算平均(KEM方式参照)するため、これらの値は更に別のパートプログラムにより、可能ないずれの値もメモリセルのアドレスを表すと共に、アップ事象の発生時にはメモリセルの内容に1が加えられ、ダウン事象の発生時には−1が加えられるようにして、時間パターンメモリに入力される。これにより、設定可能な限りの多数の測定値が加算可能である。内容はパルスチェーンの加算の一次導関数に一致している。パルスチェーンの加算は「SW振幅関数」(SW=software)又は略して「SW振幅」と称される。従って、このSW振幅には、時間パターンメモリの内容が更に別のパートプログラムで積分されることによって達することができる。この積分は非常に多数のセルに及んで実行される(TOFは遅延時間で除される)ことになるので、前記と同じ計算は更に別のパートプログラムで、部分期間を考慮することなく、専らカウント値を用いて実行され(「粗積分」)、これは粗SW振幅を結果する。このための計算労力はSW振幅の計算に要される労力のほぼ50分の1以下である。
【0097】
SW振幅のノイズの平均値は更に別のパートプログラムを使用して計算され、SW振幅のパルスを検出するためのSW基準値はノイズパルス検出に必要とされる確率が超えられないようにして決定される。信号パルスの事象は粗SW振幅にSW基準を適用することにより突破点として見いだされる。これらの事象は「SW粗事象」と称される。時間パターンメモリの内容の積分(「精密積分」)は、(遅延時間に変換された)SW粗事象のこれらのアドレスでの中心としてこのアドレスの小さな領域に統合される。SW振幅のパルス形状はこの処理をもたらす。
【0098】
更に別のパートプログラムにおいて、これらのパルスのフランクは直線によって近似され、SW振幅のノイズの中心線と交差させられる。これらの点は可変的なパルス振幅とは独立したパルス最下点であり、温度ドリフトと絶対オフセットに関する先に記録された表値によって補正されて、実際の距離に変換される。
【0099】
別のパートプログラムにおいて、直線はSW基準と交差させられ、交差点は温度ドリフトと絶対オフセットに関する先に記録された表値によって補正されて、実際の距離に変換される。
【0100】
更に別のパートプログラムにおいて、当該SWダウン事象からSWアップ事象を差し引くことによってパルス幅が計算される。このパルス幅は反射パルスの電力の尺度を表しており、原距離値の計算のため、先に記録、記憶され、各々のパルス幅に補正値が対応させられている、補正値付き補正表によって、異なるパルス振幅の結果としてのSWアップ事象のエラー補正に使用される。
【0101】
別の実施形態の評価プログラムにおいて、SW振幅は処理前にフィルタリングされる。ボックスカーフィルタは、低計算労力でSW振幅のデジタル化部分の平滑化が可能であるために、特に好適である。
【0102】
以上に、遅延素子を援用したTPの決定が述べられた。但し、この信号遅延方法はTP測定の唯一の可能性を表しているわけではない。別法として、例えば測定クロック信号のn倍位相変位により、連続した2位相の位相角度差変位された測定クロック信号がTP測定の分解能を決定するようにして、TP測定を行うこともできよう。
【0103】
図9は、ピッチ(ダイオード間隔+ギャップ)(127)、ギャップ(128)及び活性面(126)又はダイオード幅(129)によってほぼ幾何学的に決定される受信アレイ(9)(図3参照)のAPDアレイ(125)の活性ゾーンを示している。約80〜100μmのギャップは、100に等しいか又はそれ以上のレベルの増倍率発生のためのAPDの高バイアス電圧のために不可避である。もしピッチがギャップの2倍の大きさを有していれば、長さ13mm未満のアレイに例えば64ダイオードを作り出すことができる。このアレイが光投射系によって距離場に投影されれば、アレイは、組み合わさって視覚空間角(125a)を形成する64の個別視覚空間角(126a)(図9a参照)を生ずる。空間角のサイズは集束光学系(48)の焦点距離によって決定される。
【0104】
図10は、ピッチ(ダイオード間隔+ギャップ)(132)、ギャップ(133)及び活性面(131)によって同じくほぼ幾何学的に決定されるレーザダイオードアレイの活性ゾーンを示している。製造工程の結果として、ギャップは活性ゾーンの大きさのオーダーで存在し、活性ゾーンの幅は入手可能な多くのレーザダイオードにつきほぼ200μmである。従って、長さ3.2mm未満の例えば8レーザダイオードのアレイを作り出すことが可能である。
【0105】
レーザダイオード間のギャップにより、個別送信空間角が1閉アレイの個別送信空間角を形成するように、2アレイを適切に調整することができる。これらの2レーザアレイで、つまり、16レーザダイオードの個別送信空間角で、64APDの1APDアレイの視覚空間角を、適切に選択された焦点距離の光投射系(47)によってカバーすることができる。このシステムでは、64個の時間測定チャネルを有した1個の時間測定IC又は、4チャネルと、スタートパルス及び信号用のマルチプレクサとを有した1−最小時間測定ICで十分であろう。
【0106】
図17は、APDアレイ(9)がレーザダイオードアレイで置き換えられれば、相応して2レーザダイオードアレイ用に使用することのできる、2APDアレイ(9)用のこのタイプのシステムを示している。
【0107】
更に別の実施形態において、個別送信空間角が64APDの視覚空間角をカバーするように、それぞれに対応した投射レンズを有する16レーザダイオードも調整可能である。図12aには、個別送信空間角(131a)が4ADPSの4個別視覚空間角(126a)の全体をカバーするその種のセグメントが示されている。
【0108】
図10aは、例えば、個別送信空間角が組み合わさって1送信空間角(130a)を形成するように、レーザダイオードアレイ(130)が距離場で投影されるというようにして生ずる個別送信空間角(131a)を示している。
【0109】
図12は、調整望遠鏡を通して光学系をのぞいたときに現われるような、送信空間角と視覚空間角とがオーバラップするように調整されなければならない、APDの4活性ゾーン(126)とレーザダイオードの活性ゾーン(131)とのセグメント(139)の編成を示している。図13は、アレイ(142)を形成するための複数のセグメント(139)の組み合わせを表している。
【0110】
いずれの場合(2レーザダイオードアレイ又は16個別レーザダイオード)にも、各々のレーザダイオードの電力が4APDと4ギャップに分配されるため、レーザダイオードの電力はほぼ1/8に減少する。パルス電力がほぼ50ワットとすれば、6ワット以上がなお1APDに付随しており、これは数百メートルに及ぶ距離測定にとって十分であろう。但し、距離は、視覚空間角サイズを、従って方位分解能も決定する、集束光学系(48)の選択された焦点距離にも依存している。もしも光学活性ゾーン(126)と(131)の寸法が固定されれば、これは通例、素子の可用性が制限されているためにそうであるが、光学系の構成によって、送信空間角、視覚空間角(従って、方位分解能)及びシステムの範囲が固定される。
【0111】
更に、(例えばKEM方式による又は前記KEM特許出願明細書に開示されているような)加算平均法により範囲増大が達成可能である。
【0112】
重要なことは、送信空間角及び視覚空間角の偏向装置を使用することなく、64APDのADPアレイと16レーザダイオードによる送信アレイとを有する1実施例として述べたシステムですでに64点を有する距離プロファイルが得られることである。これによりいわば、実際の意味での、つまり偏向装置例えば回転鏡又は傾倒鏡を使用しての走査なしに、深さ分解能を有するラインスキャナが実現される。こうして得られた距離プロファイルはすでに多くの用途に十分使用することができる。16レーザ、64ADP及び、1個別送信空間角での4個別視覚空間角のカバーへの固定は任意の又は単なる例であるが、但し有意な例として選択されている。
【0113】
制限的パラメータは実際には、半導体レーザダイオードによるパルスレーザの最大パルス繰返し周波数(PRF)によって所与である。50ワットを超えるパルス電力で、少なくとも目下、ほぼ20kHzの平均PRFが可能であるにすぎない。個々のレーザの破損中にも、レーザアレイのその他のレーザを用いて測定を実施することができる。最大作動範囲(距離)を400mとして、すでに上述したように、いわゆるバースト測定としてレーザアレイの16の直列レーザの各々を使用して個別測定が実施されれば、これらの16の個別測定は、逐次に実施され、その持続時間は50μs−これは連続的な距離プロファイル撮像による、20kHzというレーザの最大平均PRFに正確に一致している−未満となろう。このことから直接、時間測定ICはたった4個の時間測定チャネルを有していればよいことになろう(1レーザが64APD/16レーザ=4という4APDに「チャージ」する)。スタートパルスと信号はマルチプレクサ(18及び19)により常に同じ4個の時間測定チャネルにグループで直列に供給される。
【0114】
一般に、時間測定ICのための画素のグループ化につき、最も多様な実施形態の送信/受信アレイとそれらの組み合わせに関して以下の規則を設定することができる。
・1列に線状配置され、個別視覚空間角と個別送信空間角との区別可能なカバーが作り出される空間角セグメント(149)(図12a参照)として分離された距離画素は、送信器の数n及び受信器の数mつまり数(m、n)によって明確に識別可能である。
・送信器の全体として検出可能な電磁波を受け取るこれらの区別可能な距離画素はサブグループとしてグループ化される。
・これら多くのサブグループがグループ化されて、所属する区別可能な距離画素の数が独立した時間測定チャネルの数に等しいか又はそれ以下である1グループ(7a及び13a)(図7参照)を形成する。
・十分な時間測定チャネルが存在しない場合には、グループは逐次にマルチプレクサ(18及び19)を経て誘導されて、1グループに共属する信号(7a)とスタートパルス(13a)が時間測定IC(32)の時間測定チャネルに直列に誘導される。
・時間測定ICに全ての距離画素にとって十分な時間測定チャネルが存在する場合には、共属する信号(7b)とスタートパルス(13b)は時間測定IC(32)の時間測定チャネルに直接に誘導される。
【0115】
ポンピングされれば、例えば2.6kWという基本的に相対的に高いパルス電力の高出力レーザが使用され、パルスが円筒レンズによって64APDの視覚空間角に一致する送信空間角に光学的に拡散されれば、ADP当たり20ワットが利用可能であり、これはkm距離の範囲を可能にすると共に、このレーザの出力を完全利用するためには時間測定ICでは64個の時間測定チャネルが必要とされることとなる。範囲も繰返し周波数も共に相対的に大きな値を取ることから、この構成は、例えば航空機からのいわゆる地形プロファイリングにとって特に好適であろうと考えられる。
【0116】
20kHzでの半導体レーザダイオード送信パルスを使用した距離プロファイル撮像から出発して、適正な高速偏向装置が光学系の前に配置される場合に距離プロファイル撮像が可能となる繰返し周波数を容易に決定することができる。偏向ユニット(50)(例えば図18参照)につき、偏向角90°の4多面鏡スキャナで可能なように、時間の50%にわたり、従って送信空間角と視覚空間角の縦方向に対して横向きに、距離像当たり100距離プロファイルでパルスが送信可能であると想定すれば、毎秒、64*100=6,400画素の100距離像が撮像可能である。測定周波数は640kHzとなろう。この相対的に並外れた測定周波数は、20kHz*0.5時間率*16レーザ*4APD=640kHzで達成される。単一のレーザと単一の受信器による従来のセンサとの比較では、2偏向装置が必要と考えられ、従って、パルス送信の時間は25%に減少するために、5kHzの測定周波数が達成可能にすぎないであろう。従って、6,400距離画素では1Hzの距離像周波数さえ達成不能であろう。
【0117】
測定周波数640kHzでの距離像繰返し周波数25Hzにつき、精度を高めるための4倍の加算平均又は第2の偏向ユニットによる像幅の倍化を行うことができ、なお従来の撮像カメラのレンジの距離像周波数が達成されよう。
【0118】
このシステムについては、1レーザダイオードの電力が複数のフォトダイオードに分割される点が考慮されなければならない。これは、もっぱら個別送信空間角と個別視覚空間角及び光学系の寸法が異なって選択される点で基本的に同じ、本発明による装置で回避することができる。
【0119】
図14、15は、レーザダイオードの電力が複数のAPDに分割されず、これによって、範囲が基本的に高められる装置の送信素子の活性ゾーン(131)と受信素子の活性ゾーン(126)を示している。光学系のパラメータの適切な選択によって、複数の個別送信空間角が1個別視覚空間角を含むように、APDアレイ要素の活性ゾーン(126)は線状に拡張されている。セグメント(139)はアレイ(142)に拡張することができる。これら2つのシステムの中間的な解決法も実現可能である。特別な1例は正確にAPDごとに1レーザであろう。時間測定ICのための距離像点のグループ形成につき先述した規則は全ての態様に当てはまる。なお更に別の特別な1例において、1レーザと1受信器だけが存在し、受信器の視覚空間角はレーザの送信空間角を含んでいる。このシステムは本発明による相対的に単純な距離センサに相当する。
【0120】
いかなる組合せの送信及び受信アレイ、いかなる寸法の活性ゾーン及び光学系、いかなるタイプの時間測定ICが使用されるかは必要性とコストの問題である。アレイの送信素子及び受信素子は固有の寸法を有することから(市場での入手可能性及び物理的理由)、図12/13に示した構成は特に、装置が高い方位分解能を有する必要があるが、比較的低レンジであってよいときに使用され、図14/15に示した構成は、装置が方位分解能は低いが比較的大きなレンジで大きな角度範囲を有する必要があるときに使用される。個別測定の評価のタイプは基本的に同じである。
【0121】
受信素子としてのAPDアレイによる上述した受信アレイにより、事実、レンジ内にある目標物の、実際3%〜100%(倍率33)で生ずる異なる反射率の結果として、膨大な信号移動が存在する。信号は2〜200mの異なる距離で全体として33*10,000=330,000という荷重倍数を有する(二乗依存性により倍率10,000)。信号光の一部は上述したギャップに陥り、同所において−大量の信号により−所望の信号と重なり合う、少ないが但し十分な電気的混信パルスが発生するが、これはアレイ技法の基本的な問題である。
【0122】
この作用はシャドーマスク(134)(図16参照)により劇的に減少させることができる。シャドーマスク(134)はまた、APDの活性ゾーンに入射すると考えられる光のみを通過させるように設計されている。シャドーマスク(134)は、図16に示したように、APDアレイに直接取り付けられる。望ましくない光が活性ゾーン領域にまったく入り込まないようにするため、シャドーマスクが鏡面コートされるか又はシャドーマスクがAPDアレイのカバープレート又はAPDに不透過性材料でプリントされることにより、残りの光を回避することができる。
【0123】
但し、シャドーマスクの孔を通過する光の一部はAPDによって反射されて、シャドーマスクの下側から逆反射され、一定の条件下で散乱させられることもある。ほぼ2回の往復反射の後、この光は隣接活性ゾーンに達し、同所で妨害信号として作用することがあろう。この作用は、シャドーマスクが鏡面層として形成されている場合に、キャリアガラスの背面に信号光を吸収する材料層が設けられることによって減少させることができる。更に、ただほんの僅かな光(逆反射された信号光のほぼ10%)がシャドーマスクの背面に当たるであろう。ADPの反射率が約20%で、吸収性材料の反射率が約5%であれば、10%*(20%*5%)2=10−5の減少となる。それ故、この妨害信号は、上述したダイナミックレンジとの比較が示すように、弱い信号の範囲内にある。
【0124】
こうした理由から、更に別の実施形態において、シャドーマスク(134)はAPDアレイ(9a)の前に密接して配置されるのではなく、図17に示されているように、受信アレイの集束光学系(48)の焦点面に例えば45°の角度で配置されることができ、シャドーマスクは更に別のレンズ(156)によりその背後に配置されたADPに投影される。今や、吸収層が省かれる場合に逆反射される光(158)はシャドーマスク(134)の鏡面コート層の下側により、もっと離れて配置された吸収体上に反射され、同所で消滅させられる。従ってこのようにして、こうしたシャドーマスク(134)を援用してセンサ素子を効果的に互いに光学的に絶縁することが可能である。
【0125】
図17は、シャドーマスクの更に別の重要な利点を示している。シャドーマスク(134)が焦点面に配置される場合、装置の近接作動範囲内に位置し、それ故強い信号を反射する目標物の信号は焦点面の後方に投影される。これにより、これらの信号のごく一部がシャドーマスクの孔を通って入射するように焦点面の信号像は非常に拡大される。
【0126】
孔の寸法設計が最大作動範囲のための画像化サイズに適合されれば、信号動特性は近接場の信号の減少により10分の1に減少させることができる。この効果は双方のケース(APDの直前又はAPDアレイへの45%投影でのシャドーマスク配置)に利用することができる。鏡面コート層を有する、45°の傾斜で設定されたシャドーマスクは更に、上述したように、密な視覚空間角を生成するために2APDアレイを使用するための幾何的スプリッタとして好適である。
【0127】
同様に、この形のシャドーマスクの使用は密な送信空間角を生成するために2レーザダイオードアレイを組み合わせるのに好適であろう。上述した実施例における距離画素数はこれにより12,800に増加させることができる。この場合、この増加は、時間測定ICに2倍の数の時間測定チャネルが存在すると共にマルチプレクサが相応して拡張されれば、距離像周波数の減少を結果するには及ばない。この実施形態の装置において、時間測定ICは8個の時間測定チャネルを有し、マルチプレクサは4個の時間測定チャネルを並列に2回「チャージ」する。
【0128】
センサアレイ及び送信素子アレイに適した時間測定回路は好ましくは例えばCMOSによる集積されたICとして製造される。こうして、距離プロファイルは偏向ユニットなしで撮像可能であり、距離像は単一の偏向ユニットとの組み合わせで撮像可能である。特に好適な時間測定法は前記KEM特許出願明細書に述べられている。本発明による測定チャネル用回路を有した時間測定ICによる特にKEM特許出願明細書に述べられているような時間測定法の実現と、本出願に述べられているような要素の配置とは、距離撮像にとって特に有効である。
【0129】
本発明により、距離プロファイル撮像(2D)用装置は偏向ユニットにより、より広い距離プロファイル撮像(より大きな角度範囲による2D)用装置又は距離撮像(3D)用装置に拡大することができる。距離プロファイル並びに距離像はいずれも、送信空間角及び視覚空間角の偏向に使用される偏向ユニットのタイプとは基本的に無関係である。
【0130】
図18は、多面鏡(51)が駆動モータ(55)によって回転軸(52)を中心にして回転させられ、回転角が角度測定装置例えば角度読取り器(54)を備えたコード輪(53)によって検出される偏向ユニットを示している。多面鏡としては、例えば2、4又は6鏡面(56)を組み合わせて多面鏡(51)とすることができ、2つの面は両面鏡に相当している。この偏向ユニットは以下、多面偏向ユニット(50)と称される。
【0131】
これらの多面偏向ユニットの2つを互いに交差するように取り付けて、組み合わせ、3D多面偏向ユニットと称される偏向ユニットを形成することができる。
【0132】
図(20)は自動トランシットの望遠鏡に代わる距離プロファイル撮像用の集成装置を示している。ここで、自動とは、トランシットの水平軸と垂直軸がモータによって駆動され、予め設定可能な角度範囲内で空間角を連続的に移動させることができることを意味している。この点で、運動は、距離画素で均一に満たされた距離像が生ずるように制御される。このタイプの偏向ユニットはトランシット型偏向ユニットと称される。
【0133】
図(21)は、垂直偏向のための多面偏向ユニットと、図19に示したような水平偏向のための回転テーブル(59)による垂直軸まわりの回転との組み合わせを示している。この偏向ユニットは回転テーブル/多面偏向ユニットと称される。
【0134】
更に、偏向方向は、図(21及び22)に示されているように、送信空間角又は視覚空間角の方向又はそれらに対して横向きの方向に行なうことができる。送信空間角と視覚空間角の方向への偏向(縦方向偏向(63))はより長い距離プロファイルを生じ(2D)(図21)、他方、送信空間角と視覚空間角の方向に対して横向きの偏向(横方向偏向(62))は距離像(3D)(図22)を生ずる。
【0135】
距離プロファイル撮像用装置を、送信空間角と視覚空間角をアレイ方向又はそれに対して横方向に回旋させるためのそれ自体公知の偏向ユニットと組み合わせ、又、装置を可動キャリアに取り付け、送信空間角と視覚空間角をアレイ方向又はそれに対して横方向に運動させ、送信空間角と視覚空間角をアレイ方向とそれに対して横方向に回旋させることにより、距離プロファイル撮像用装置から距離撮像用装置に移ることができる。こうして、それぞれの異なる用途に文句なしに適した、但しそれでいて基本設計及びブロック図の点でほぼ同じ、距離撮像のための極めて多様な装置及びシステムが結果する。可動キャリアは、例えば、車両、クレーン、移動体作業プラント、ヘリコプタ又は航空機である。
【0136】
以下、純然たる例示によって、特定の用途を有する、特別なタイプのこれらの撮像用装置を説明する。
【0137】
図21は、パノラマ距離撮像のための、多面偏向ユニット(50)及び回転テーブル(59)と組み合わされた装置(61)を示している。垂直に配列された距離像片は、例えば、採石場、露天鉱操業現場、建築現場又は谷間における全周距離像用に使用することができる。
【0138】
図22は、送信空間角と視覚空間角が偏向方向に垂直に配向された基本的に同じ装置を示している。この装置は、大きな垂直空間角の距離像に特に好適である。APDアレイ(例えば図9参照)のピッチ(132)のn分の1以下の孔寸法を有し、同じ個別送信空間角で送信するnレーザを備える特別な態様のシャドーマスクにおいて、この装置はn倍高い方位分解能で、垂直に配向された距離プロファイルの高速撮像に好適である。
【0139】
図23は、図22に示した装置と同じであるが、この場合、該装置は移動方向(64)のキャリア車両(65)上に搭載されている。キャリア車両(65)が運動し、垂直にかつ移動方向に対して直角に配向された距離プロファイルが走行中に撮像される場合には、全ての距離プロファイルは組み合わさって円柱座標による周囲距離像を形成する。反対側の周囲は、偏向ユニット(50)の上方に取り付けられた更に別の装置(61)を使用して撮像することができる。とびとびの点で、キャリア車両を静止させ、回転テーブル(59)を使用して、移動路に沿ったパノラマ距離像を撮像することも可能である。このタイプの距離撮像は特に都市の測定に適しているが、それは道路の左右の目標物が異なる角度で測定され、道路に対して角度をなして配向された面もこうして検出されるからである。
【0140】
図24は、図21に示した装置と同じであるが、但し回転テーブルなしで、航空機(66)の下側に取り付けられ、実際、垂直方向又は横方向偏向(62)が行われると共に、飛行方向(67)に送信空間角及び視覚空間角が配向される装置を示している。この装置を用いて、下方の地形のエンドレスな距離撮像が可能である。本発明による装置の高速測定速度により高速飛行速度でも距離撮像が可能である。
【0141】
図25は、互いに直交配置された2多面偏向ユニット(50)を含む3D多面偏向ユニットと組み合わされた距離プロファイル撮像用の装置(68)を示している。この装置を用い、空間角(71)で高速の距離撮像が可能である。空間角がもっと小さければ、単一の多面偏向ユニット(50)でも十分であろう。安全スペース(69)は空間角(71)内に定められる。この安全スペース(69)内で目標物が検出されれば、作業プラント(70)を停止させる信号が生成される。
【0142】
図26は、互いに直交配置された2多面偏向ユニット(50)を含む3D多面偏向ユニットと組み合わされた距離プロファイル撮像用の装置(68)を示している。この装置を用い、材料の増減を実施する作業プラント(70)の作業ゾーン内において空間角(72)で高速距離撮像が可能である。距離像は作業プラント(70)の作業目標物に応じて評価され、作業プラント(70)の制御に適切に使用される。
【0143】
図11は、本発明の更に別の1実施形態において、受信器(2)(例えばAPD)及び送信器(10)(例えばレーザダイオード)又は、受信器の活性検出面126又は個別視覚空間角126a(以下、単に「受信器」とする)及び送信器の活性ゾーン131又は個別送信空間角131a(以下、単に「送信器」とする)の考えられ得る更に別の配置を示している。受信器は第1の方向に伸長されて構成され、第1の方向に対して直角に延びる第2の方向に互いに「積み重ねて」配置されている。互いに平行に配置された複数のセンサはそれらの幅全体に及んで、つまりそれらの長手方向伸長方向に配置され、同じく伸長されて、それぞれ全てのAPDアレイ要素(受信器)をカバーしており、送信器の長手方向伸長は受信器の長手方向伸長に対して90°回転されている。送信器は直列にトリガされ、実際それぞれの場合に、最大TOFの経過後にトリガされる。この配置は受信器及び/又は送信器の長手方向伸長の方向に反復によって連続させることができる。この配置が空間中で1又は複数の偏向ユニットによって運動させられる場合には、どの偏向角度方向においても密な距離画素配置が生ずるようにして送信器のトリガ時間を設定することができる。図11に示した配置では、4×8=32の画素が結果する。
【0144】
従って一般に、互いに平行な、伸長された受信器/検出面/個別視覚空間角とそれに対して横方向に延びる、互いに平行な、伸長された送信器/送信面/個別送信空間角とのマトリックス状又は格子状の構造を設けることができ、送信器は好ましくは直列に動作させられる。このマトリックス構造又は格子構造は基本的にもはや、先述したような「ラインスキャナ」ではなく、当該数の画素の面状配置が実現されることからして、すでに「深さ分解能付き3Dカメラ」と称することができる。この「ミニ距離像カメラ」を空中で1又は複数の偏向ユニットによって運動させることにより、より大きな像を−十分に高い像繰返し周波数で−つまり、十分に高い画素数を有する像を撮像することができる。
【0145】
以下に、本発明の更に別の考えられ得る実施形態を挙げる。
【0146】
本発明により以下のようにすることが可能である。
−基準(5)が異なるレベルに設定された2又はそれ以上の比較器(4)が受信増幅器(3)の後に接続され、及び
−1測定チャネルが各々の比較器出力のために可用化され、
−同所で、当該スタートパルス事象を有する比較器出力の全ての事象の時点が測定されるようにすること。
【0147】
本発明により更に以下のようにすることが可能である。
−各々の偏向ユニット(50)は、モータ(55)によって駆動されて回転軸(52)を中心に回転する、全ての鏡面(56)が回転軸と平行に回転軸まわりに取り付けられた多面鏡(51)と、
−偏向角度を測定するための角度測定装置(53、54)とを含むこと。
【0148】
本発明により更に以下のようにすることが可能である。
−少なくとも1偏向ユニットは、偏向方向が制御可能な電子制御式MEMS鏡スキャナとして作製されること(MEMS=超小型電子機械系)。
【0149】
本発明により更に以下のようにすることが可能である。
−2偏向ユニットが電子制御式MEMS鏡スキャナとして作製されること。
【0150】
本発明により更に以下のようにすることが可能である。
−偏向ユニットは、モータ駆動される制御可能な垂直軸と水平軸とを有する電子制御式トランシット偏向ユニットとして作製されること。
【0151】
本発明により更に以下のようにすることが可能である。
−第1の偏向ユニットは制御式多面偏向ユニット(50)として作製され、
−第2の偏向ユニットは電子制御式回転テーブル(59)として作製されること。
【0152】
本発明により更に以下のようにすることが可能である。
−1又は複数の線状活性ゾーンを有する半導体レーザダイオードが送信素子(10)として使用されること。
【0153】
本発明により更に以下のようにすることが可能である。
−半導体レーザダイオードは、活性ゾーンがギャップによって断続される線を形成するレーザダイオードバー又はストリップの形のレーザアレイとして作製されること。
【0154】
本発明により更に以下のようにすることが可能である。
−レーザビーム線状パルスの発生は、半導体レーザダイオードを使用してポンピングされる固体レーザで行われ、
−該レーザのほぼ平行な電磁波はシリンドリカルレンズによって拡大されて投射線状空間角を形成するようにすること。
【0155】
本発明により更に以下のようにすることが可能である。
−レーザビーム線状パルスの発生はラマン・レーザによって行われ、
−該レーザのほぼ平行な電磁波はシリンドリカルレンズによって拡大されて投射線状空間角を形成するようにすること。
【0156】
本発明により更に以下のようにすることが可能である。
−レーザビーム線状パルスの発生は、パルス化法で動作する半導体CWレーザを使用して行われること。
【0157】
本発明により更に以下のようにすることが可能である。
−送信素子アレイは線状に直列配置されたLEDを含んでいること。
【0158】
本発明により更に以下のようにすることが可能である。
−結像光学レンズ系が投射系(47)及び/又は電磁波集束系(48)として使用されること。
【0159】
本発明により更に以下のようにすることが可能である。
−レーザアレイ(16a)の投射系は1投射レンズアレイを含み、
−送信アレイ(16a)の各々のレーザ(15a)は専用の投射レンズを有し、
−該レーザの個別送信空間角(131a)は組み合わさって線状送信空間角(130a)を形成し、
−該レーザの活性ゾーンは特に、アレイ配列に対して斜めに設定され、
−それぞれ1レンズが1送信モジュール(15a)に対応し、
−レンズは特にGRINレンズであってよいこと。
【0160】
本発明により更に以下のようにすることが可能である。
−APDアレイ(125)の各々のAPDはアレイ配向に対して斜めに配向されるため、
−ギャップなしAPDアレイがアレイ方向に対して横向きに形成されること。
【0161】
本発明により更に以下のようにすることが可能である。
−シャドーマスク(134)がAPDアレイ(125)に前置され、
−APDアレイの各々のAPDには当該個別視覚空間角(126a)からの反射光がシャドーマスクの孔の1つを通過して達することができ、
−シャドーマスク(134)は電磁波集束系(48)の焦点面に配置され、
−孔の形状は方形であり、
−特に、それぞれの孔の寸法はAPDアレイ要素の活性面の寸法よりも小さく、
−特に、該寸法はAPDアレイの活性面のピッチのn分の1より小さく、この場合、nは整数であってよいこと。
【0162】
本発明により更に以下のようにすることが可能である。
シャドーマスクは
−孔の領域が透明であり、
−受信方向で見て、孔の外側は鏡面コートされていて、使用される光にとって透過性がなく、
−APDアレイ側から見て、特に、大幅に反射を減少させる層が設けられていること。
【0163】
本発明により更に以下のようにすることが可能である。
−シャドーマスク(134)はAPDアレイのカバープレートにプリントされ、
−プリント材料は使用されるレーザ線を大幅に吸収すること。
【0164】
本発明により更に以下のようにすることが可能である。
−APDアレイ配列のシャドーマスクの孔はAPDアレイのAPD素子のピッチのn分の1より小さく、
−同じ個別視覚空間角にnレーザが配列され、
−レーザは、偏向中にシャドーマスクによってサイズの減少させられた個別視覚角が直列に組み合わさって閉パターンを形成するように、直列にトリガされること。
【0165】
本発明により更に以下のようにすることが可能である。
−それぞれ受信素子アレイとしての1APDアレイを有した2受信アレイ(9)が使用され、
−該アレイはシャドーマスクの後に接続されたそれぞれのレンズを介して反射光でチャージされ、
−電磁波集束系の焦点面に配置された、斜め配向され、鏡面コートされたシャドーマスクは幾何的ビームスプリッタとして機能し、
−2APDアレイは、双方のAPDアレイの個別視覚空間角が組み合わさって密な線状空間角を形成するように、調整されること。
【0166】
本発明により更に以下のようにすることが可能である。
−レーザアレイバーによる2送信アレイが送信素子として使用され、
−これにより2チャネルが、幾何的ビームスプリッタとしての、光投射系(47)の焦点面に配置された、鏡面コートされて斜めに配向されたシャドーマスク(134)によって形成され、
−該2チャネルにおいて1レンズ(156)がそれぞれシャドーマスクの後に接続されて、レーザアレイバーの光はレンズでシャドーマスクに投影され、
−レーザアレイバーは、双方のバーの個別送信空間角が組み合わさってギャップなし線状送信空間角を形成するように、調整されること。
【0167】
本発明により更に以下のようにすることが可能である。
−1又は複数の装置が航空適合車両の下に取り付けられ、
−該装置の線状視覚・送信空間角が飛行方向に対して横向きに組み合わさって下方に向けられた広い空間角を形成し、
−地表の距離プロファイルが連続的に撮像、記憶され、
−特に、複数の距離プロファイルが加算平均されて距離プロファイルを形成し、
−距離プロファイルは集成されて地表の距離像を形成すること。
【0168】
本発明により更に以下のようにすることが可能である。
−1又は複数の装置が航空適合車両の下に取り付けられ、
−線状視覚・送信空間角が飛行方向に組み合わさって下向きの広い空間角を形成し、
−送信・視覚空間角は偏向ユニットを使用して飛行方向に対して横向きに連続的に偏向され、
−飛行方向に対して横向きに配された距離像片が撮像、記憶され、
−特に、距離像片は飛行方向において互いにオーバラップし、
−距離像片は集成されて地表の距離像を形成すること。
【0169】
本発明により更に以下のようにすることが可能である。
−1又は複数の装置が車両(65)上に取り付けられ、
−線状視覚・送信空間角は移動方向(64)に対して直角をなして配向され、
−該空間角は偏向ユニット(50)により視覚・送信空間角に偏向され、
−車両周囲の距離プロファイルが走行中に連続的に撮像・記憶され、
−該距離プロファイルの配向は走行方向に対して90°以外で水平に固定され、
−距離プロファイルは集成されて車両周囲の距離像を形成すること。
【0170】
本発明により更に以下のようにすることが可能である。
−静止時に、撮像装置は回転テーブルの回転によって垂直軸を中心に回転させられ、
−距離プロファイルが連続的に撮像、記憶され、
−距離プロファイルは集成されて、車両周囲の球面座標による距離像を形成すること。
【0171】
本発明により更に以下のようにすることが可能である。
−それぞれnレーザが同じ個別視覚空間角に配向され、
−nレーザは、偏向中にシャドーマスクによってサイズの減少させられた個別視覚角が直列に組み合わさって閉パターンを形成するように、直列にトリガされ、
−距離プロファイルがn倍の高さの分解能で測定され、
−距離プロファイルは集成されて環境の距離像を形成すること。
【0172】
本発明により更に以下のようにすることが可能である。
−空間角領域の境界座標が入力され、
−予め設定された空間角領域の掃引によって当該距離像が撮像、記憶されること。
【0173】
本発明により更に以下のようにすることが可能である。
−送信・視覚空間角が水平に配向され、
−装置が回転テーブルを使用して垂直回転軸を中心にモータ駆動されて回転させられ、
−空間角領域の境界座標が入力され、
−予め設定された空間角領域の掃引によって当該距離像が撮像、記憶されること。
【0174】
本発明により更に以下のようにすることが可能である。
−装置が材料の除去又は供給を行なう作業プラント(70)に接続されて、装置の作動空間角(72)が作業プラントの作業範囲に整合され、
−目下の作業ゾーンの距離像が連続的に撮像され、
−比較面の面座標が入力され、
−距離像がプラントの作業目標物に応じて評価され、
−プラントは評価結果に従って制御されること。
【0175】
本発明により更に以下のようにすることが可能である。
−装置が1又は複数の作業プラントの上方に取り付けられ、
−距離撮像が可能な装置空間角はモニタされるべき作業プラント(単数又は複数)の運動ゾーンに整合され、
−空間角はモニタされるべき作業プラントの運動ゾーンよりも大きく選択され、
−距離像が連続的に撮像され、
−3次元安全スペースが事前定義されて、記憶され、
−距離像は、物体の侵入の有無又は、装置によってモニタされる空間角内に、定義された安全スペース内で検出されるほど深く、物体が侵入したか否かについて評価され、
−安全スペース内で物体が検出されると信号が導出され、
−信号は1又は複数の作業プラントの電源遮断又は作業プラントの運動ゾーンを制限するために使用されること。
【0176】
本発明により更に以下のようにすることが可能である。
−距離プロファイル又は距離像が撮像される空間角は更にCCDカメラで撮像され、
−色、輝度、距離、電力及び/又はパルス幅に関する情報が組み合わされて距離像情報を形成すること。
【図面の簡単な説明】
【0177】
【図1】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図2】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図3】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図4】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図5】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図6】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図7】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図8a】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図8b】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図8c】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図9】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図9a】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図10】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図10a】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図11】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図12】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図12a】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図13】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図14】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図15】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図16】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図17】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図18】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図19】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図20】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図21】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図22】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図23】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図24】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図25】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【図26】短レーザパルスがパルス電磁波として用いられるパルスTOF測定を使用した時間測定又は距離撮像のための本発明による装置並びに本発明による方法の応用例を含めた、実施形態を説明するための図。
【符号の説明】
【0178】
1 光パルス
2 受信素子、アバランシェフォトダイオード
3 受信器の増幅器
4 受信器の比較器
5 比較器の基準
7 受信器の出力信号、時間測定チャネルのための入力信号
7a マルチプレクサの出力
8 受信モジュール
9 受信アレイ
10 送信素子、半導体レーザダイオード
11 電流パルサ
12 トリガ信号
13 スタートパルス
13a マルチプレクサの出力
14 レーザビーム、光レーザパルス
15 レーザモジュール
16 レーザアレイ
17 測定プロシージャ制御
18 マルチプレクサ
19 マルチプレクサ
20 入力ミクサ
21 パルススイッチ
22 TPセパレータ
23 カウンタ
24 遅延アレイ
25 デコーダ
26 メモリ
27 インタフェース
28 マイクロプロセッサシステム
29 時間測定制御
30 クロックユニット
31 サブアレイ要素
32 時間測定IC
33 測定クロック
47 光投射系
48 電磁波集束系、集束光学系
50 偏向ユニット
51 多面鏡
52 回転軸
53 コード輪
54 角度読取り器
55 駆動モータ
56 鏡面
59 回転テーブル
61 距離撮像装置
62 横方向偏向
63 縦方向偏向
64 移動方向
65 キャリア車両
66 航空機
67 飛行方向
68 2多面偏向ユニットを備えた装置
69 安全スペース
70 作業プラント
71 空間角
72 空間角
73 スタートパルス
74 マスキング信号
75 アナログエコー信号
76 受信器のノイズ
77 アナログ受信信号
79 結果信号
80 パルスチェーン
81 正のフランク、アップ事象
82 負のフランク、ダウン事象
83 測定クロック信号
84 アップTP信号
85 部分期間アップ事象
86 カウント数アップ事象
87 ダウンTP信号
88 部分期間ダウン事象
89 カウント数ダウン事象
90 オーバラップ
91 オーバラップ
125 APDアレイ
125a 視覚空間角
126 活性面
126a 個別視覚空間角
127 ピッチ
128 ギャップ
129 活性面の幅
130 レーザダイオードアレイ
130a 送信空間角
131 活性面
131a 個別送信空間角
132 ピッチ
133 ギャップ
134 シャドーマスク
139 セグメント
142 複数のセグメントのアレイ
149 空間角セグメント
156 レンズ
158 逆反射光
【特許請求の範囲】
【請求項1】
距離画素を含む多数の距離像を撮像するための方法であって、
撮像されるべき各々の距離像のためにアレイ(130)配置された複数の送信器(15)を使用して電磁波がそれぞれ送信パルス(14)の形で送信され、かつ、反射されたエコーパルス(1)がアレイ(125)配置された複数の受信器(2)を使用して検出され、かつ、前記送信パルス(14)が反射されて距離画素を形成する物体のそれぞれの距離がパルス飛行時間の算出によって測定されること、
撮像されるべき各々の距離像のために前記受信アレイ(125)の後に接続された時間測定器を使用して複数の個別測定が実施され、かつ、該個別測定において、それぞれの前記送信パルス(14)から導出された論理スタートパルス(73)と、エコーパルス(1)又はノイズパルス(76)から形成された少なくとも1つの論理受信パルス(79)とを含むそれぞれのパルスチェーンが処理されること、
前記論理受信パルス(79)がそれぞれ前記受信器(2)の少なくとも1つの基準(5)によって生成され、かつ、前記基準が下側のエコーパルス又はノイズパルスによって突破され、かつ、前記受信パルスの正のフランクを形成する前記基準(5)の超過がアップ事象(81)を定義し、かつ、前記受信パルスの負のフランクを形成する前記基準以下への下降がダウン事象(82)を定義すること、
撮像されるべき各々の距離像のために、
−前記スタートパルス(73)と当該受信パルス(79)とがそれぞれ正しい時間で組み合わされて当該パルスチェーン(80)が形成され、かつ
−上記のようにして形成された前記パルスチェーン(80)が、予め設定可能な測定プロシージャに従って、前記時間測定器によって形成された時間測定チャネル・アレイ全体に分配され、かつ
−各々の時間測定チャネルのために、
−それぞれ前記スタートパルス(73)の前の時点を基準として、受信パルス(79)まで経過する持続時間が、各々のアップ事象(81)及び/又は各々のダウン事象(82)につき、既知の周波数で中央クロック(33)によって可用化される少なくとも前記それぞれのクロックパルスがカウントされるようにして算出され、
−前記カウント結果がそれぞれの時間情報を考慮するユニットに事象リストとして記憶されること、及び
全ての時間測定チャネルの前記記憶された事象リストが読み出されて評価され、該事象リストに含まれるそれぞれの時間情報を前記距離画素に対応する距離値に変換すること、
を特徴とする方法。
【請求項2】
請求項1に記載の方法において、前記受信器(2)の前記基準(5)がそれぞれ、前記論理受信パルス(79)がエコーパルスとノイズパルスに還元されるようにして、ノイズ中に配置されることを特徴とする方法。
【請求項3】
請求項1又は2に記載の方法において、受信パルス(79)の前記処理がそれぞれ予め設定可能なスタートパルス(73)後の時点まで抑制され、前記スタートパルス(73)がそれによって生ずる時間ギャップに前記パルスチェーン(80)の形成時に正しい時間で配されることを特徴とする方法。
【請求項4】
請求項1〜3のいずれか一項に記載の方法において、各々の時間測定チャネルが2ブランチに分割され、前記アップ事象(81)は一方のブランチで測定され、前記ダウン事象(82)は他方のブランチで測定されることを特徴とする方法。
【請求項5】
請求項1〜4のいずれか一項に記載の方法において、持続時間の算出のため、それぞれ、経過したクロックパルスの総期間がカウントされると共に、前記アップ事象(81)の時点まで及び/又は前記ダウン事象(82)の時点までそれぞれ過大にカウントされた部分期間(85、88)が算出されて、各々のアップ事象(81)及び/又は各々のダウン事象(82)につき2部分結果が得られることを特徴とする方法。
【請求項6】
請求項5に記載の方法において、
前記部分期間(85、88)がTDC(時間−デジタル変換器)によって測定され、及び/又は、
前記部分期間(85、86)がそれぞれ予め設定された遅延時間の倍数として測定されて、経過した総クロックパルス期間の数を示す第1のカウント結果が得られると共に、部分期間(85、88)に経過した遅延時間の数を示す第2のカウント結果が各々のアップ事象(81)及び/又は各々のダウン事象(82)について得られることを特徴とする方法。
【請求項7】
請求項6に記載の方法おいて、前記遅延時間が、予め設定された遅延時間における望ましくない変化を補償するため、前記中央クロック(33)の期間を基準にしてキャリブレーションされることを特徴とする方法。
【請求項8】
請求項1〜7のいずれか一項に記載の方法において、撮像されるべき各々の距離像のために多数の時間測定チャネルが設けられ、前記数が処理されるべき前記パルスチェーン(80)の数より小さく、処理されるべき前記パルスチェーン(80)がグループで逐次に時間測定チャネルに供給されることを特徴とする方法。
【請求項9】
請求項1〜8のいずれか一項に記載の方法において、パルスチェーン(80)の前記パルスが多数の時間測定チャネルに分配されて、前記パルスチェーン(80)の少なくとも2パルスが異なる時間測定チャネルで処理されることを特徴とする方法。
【請求項10】
請求項1〜9のいずれか一項に記載の方法において、パルスチェーン(80)が複数の時間測定チャネルで並列に処理され、前記中央クロック(33)の前記クロックパルスが好ましくは位相変位されて前記時間測定チャネルに供給されることを特徴とする方法。
【請求項11】
請求項1〜10のいずれか一項に記載の方法において、それぞれ、同じ送信器/受信器対から生ずる、従って同じ距離画素に関する複数の個別測定が、いわゆる「バースト」測定を実施するための1個別測定のように一緒に処理されるが、前記処理に続く評価においては再び別個に扱われることを特徴とする方法。
【請求項12】
請求項1〜11のいずれか一項に記載の方法において、特に、相応して設定された受信基準(5)、特に4.5NEPより大きい値に設定された基準により、エコーパルス(1)に加えてノイズパルス(76)が存在する場合には、同じ送信器/受信器対から逐次に生ずる、従って同じ距離画素に関する複数の個別測定値は加算平均されることを特徴とする方法。
【請求項13】
請求項1〜12のいずれか一項に記載の方法において、特にいわゆる「バースト」測定の場合に、前記個別測定値の加算平均のために、
−時間ウィンドウが対応する複数のメモリセルに区分された少なくとも1個の時間パターンメモリが可用化され、
−前記中央クロック(33)の総クロックパルスの持続時間又は遅延時間の前記持続時間に一致する時間ウィンドウで、前記クロックパルス及び前記部分期間(85、88)がそれぞれこれら時間の倍数として測定され、
−前記個別測定の前記事象リストが、アップ事象(81)は正として、ダウン事象(82)は負として評価され、或いはその逆の形で評価されるようにして、同じ時間パターンメモリに逐次に転送され、
−前記受信基準(5)の突破数が各々の時間ウィンドウにつき加算平均時に積算される
こと、
を特徴とする方法。
【請求項14】
請求項13に記載の方法において、前記個別測定値の加算平均に続いて、前記時間パターンメモリの内容が積分されて振幅関数とされ、検出閾値が前記振幅関数に適用され、当該物体距離がそれぞれ、前記検出閾値が突破される少なくとも1つの時点を基礎として、エコーパルス(1)の前記振幅関数で算出されることを特徴とする方法。
【請求項15】
請求項13又は14に記載の方法おいて、前記対応するエコーパルス(1)の電力の尺度を表す前記パルス幅が、特に、前記検出閾値が突破、特に超過される時点の補正によって、前記振幅関数のエラー補償に使用されることを特徴とする方法。
【請求項16】
請求項13〜15のいずれか一項に記載の方法において、前記積分がもっぱらそれぞれ経過クロックパルス数を表す時間パターンメモリのカウント値につき実施されるようにして粗振幅関数が算出され、エコーパルスに還元される特別な部分範囲が前記粗振幅関数を基準にして識別され、前記時間パターンメモリの内容の前記積分が前記振幅関数の前記識別された部分範囲につきもっぱら実施されることを特徴とする方法。
【請求項17】
請求項14〜16のいずれか一項に記載の方法において、検出閾値が前記受信基準(5)に応じて、特に、4.5NEPの値に対する前記受信基準(5)の低下の尺度に応じて設定されることを特徴とする方法。
【請求項18】
請求項1〜17のいずれか一項に記載の方法において、少なくとも1受信器(2)の前記基準(5)が受信器(2)で測定された距離に応じて変化し、特に、距離が減少するにつれて低下することを特徴とする方法。
【請求項19】
請求項1〜18のいずれか一項に記載の方法において、
前記送信アレイ(130)の前記送信器(15)が送信電磁波を個別送信空間角(131a)に行き渡らせ、前記個別送信空間角(131a)が組み合わさって総送信空間角(130a)を形成し、
前記受信アレイ(125)の前記受信器(2)が個別受信空間角(126a)から前記反射電磁波を受信し、前記個別受信空間角(126a)が組み合わさって総受信空間角(125a)を形成し、前記総受信空間角(125a)が前記総送信空間角(130a)を含み、前記個別受信空間角(126a)と個別送信空間角(131a)との互いに区別可能なオーバラップが存在し、各々のオーバラップが距離画素に対応し、
前記オーバラップが前記時間測定器での測定のためにグループ化されて、互いに区別可能な距離画素を形成すること、
を特徴とする、方法。
【請求項20】
請求項19に記載の方法において、グループ化が空間的及び/又は時間的な関連で行われ、複数の個別受信空間角(126a)が1個別送信空間角(131a)とオーバラップしている場合には、空間的グループ化が行われて、前記受信器(2)が時間的に並列に作動し、1個別受信空間角(126a)が複数の個別送信空間角(131a)とオーバラップしている場合には、時間的グループ化が行われて、前記送信器が時間的に逐次に活性化されることを特徴とする方法。
【請求項21】
請求項19又は20に記載の方法において、送信器(15)の全体として検出可能な電磁波を表す前記区別可能な距離画素がグループ化されて、サブグループを形成し、
前記グループ内に存在する前記区別可能な前記距離画素の数が前記時間測定器の前記時間測定チャネルの数にせいぜい等しいだけの数のサブグループがグループ化されて、1グループを形成することを特徴とする方法。
【請求項22】
請求項19〜21のいずれか一項に記載の方法において、前記全体として存在する区別可能な距離画素の数と前記時間測定チャネルの数との関係に応じ、全体として存在する区別可能な距離画素にとって時間測定チャネルの数が不十分であれば、前記グループは前記時間測定チャネルで逐次に処理され、又は、前記全体として存在する区別可能な距離画素にとって十分な時間測定チャネルが存在する場合には、並列に処理されることを特徴とする方法。
【請求項23】
請求項1〜22のいずれか一項に記載の方法において、特に、前記妨害電磁波部の前記抑制のため及び/又は前記ダイナミックレンジの低下のために、前記受信器(2)、特に前記受信器(2)の前記活性検出面(126)が、特に前記受信器(2)の前に配されたシャドーマスク(134)によってマスクされることを特徴とする方法。
【請求項24】
請求項1〜23のいずれか一項に記載の方法において、前記受信器(2)の前に配されるシャドーマスク(134)が前記受信器(2)の光投射系(47)の焦点面に配置されることを特徴とする方法。
【請求項25】
請求項1〜24のいずれか一項に記載の方法において、前記距離画素によって形成された、特に線状又はストリップ形の撮像面が空間を運動させられ、前に配されたシャドーマスク(134)の孔が各々の受信器(2)に対応させられ、前記孔が撮像面の運動方向において前記受信器(2)よりも、特に前記受信器(2)の前記活性検出面(126)よりも小さく、分解能を高めるために複数の送信器(15)が前記受信器(2)に対応させられ、前記送信器が撮像面の運動に応じて逐次に活性化されることを特徴とする方法。
【請求項26】
請求項23〜25のいずれか一項に記載の方法。において、前記受信器(2)がそれぞれ撮像面の運動方向において前に配された前記シャドーマスク(134)の孔の数よりも整数倍だけ大きく、それぞれ前記受信器(2)に対応した前記送信器(15)の数が該整数倍に等しいことを特徴とする方法。
【請求項27】
請求項1〜26のいずれか一項に記載の方法において、複数の送信部分アレイ及び/又は複数の受信部分アレイが、前記送信器(15)の間特に送信器(15)の前記活性送信面(131)の間及び/又は前記受信器(2)の間特に前記受信器(2)の前記活性検出面(126)の間に存在するギャップ(128、133)が少なくとも部分的に閉じられるようにして、シャドーマスク(134)によって編成されることを特徴とする方法。
【請求項28】
請求項1〜27のいずれか一項に記載の方法において、前記送信アレイ(130)の前記送信器(15)の電磁波が、前記送信空間角の全体(130a)において、前記送信された電磁波が少なくとも1撮像線、好ましくは単一の撮像線に配されるようにして、送信されることを特徴とする方法。
【請求項29】
請求項1〜28のいずれか一項に記載の方法において、前記距離画素によって形成された、特に線状又はストリップ形の撮像面が空間を、特に装置と共に、特に例えば車両又は航空機の形の可動キャリア(65、66、70)に取り付けられた装置により全体として運動させられ、及び/又は、少なくとも1電磁波偏向ユニット(50)、特に少なくとも1つの軸を中心に回旋、回転又は傾倒可能な少なくとも1偏向鏡により、前記装置に対して相対運動させられることを特徴とする方法。
【請求項30】
請求項29に記載の方法において、前記撮像面が、傾倒軸、回旋軸又は回転軸が互いに直交して延びる2電磁波偏向ユニット(50)により空間内を可動することを特徴とする方法。
【請求項31】
請求項29又は30に記載の方法において、前記撮像面が線状又はストリップ形であり、前記撮像面がその長手伸長方向(63)に、及び/又は該方向に対して垂直方向に運動させられることを特徴とする方法。
【請求項32】
請求項1〜31のいずれか一項に記載の方法において、前記撮像距離像で所定の物体が評価ソフトウェアによって探索され(物体認識)、見出された前記物体が逐次撮像距離像を使用して追跡され(物体追跡)、プラント(70)が前記物体認識及び/又は物体追跡の結果に応じて制御ソフトウェアによって制御されることを特徴とする方法。
【請求項33】
請求項1〜32のいずれか一項に記載の方法において、請求項34〜63のいずれか一項に記載の装置が使用されることを特徴とする方法。
【請求項34】
距離画素を含む多数の距離像を撮像するための装置であって、
−送信パルス(14)の形で電磁波を送信するためのアレイ(130)配置された複数の送信器(15)と、
−反射されたエコーパルス(1)を検出するためのアレイ(125)配置された複数の受信器(2)であって、
エコーパルス(1)及びノイズパルス(76)を含むアナログ受信信号(77)を生成する増幅器(3)と、少なくとも1つの基準(5)を有する装置とが各々の受信器(2)に関連付けられ、かつ、前記基準により、それぞれ前記基準(5)を超える、エコーパルス(1)又はノイズパルス(76)に還元される一連の論理受信パルス(79)が前記アナログ受信信号(77)から生成され、かつ、前記受信パルスの正のフランクを形成する前記基準(5)の超過がアップ事象(81)を定義し、前記受信パルスの負のフランクを形成する前記基準以下への下降がダウン事象(82)を定義するものと、
−前記送信パルス(14)が反射される、それぞれ距離画素を形成する物体の距離をパルス飛行時間の算出によって測定する、前記受信アレイ(125)の後に配置された時間測定器とを含むこと、
前記時間測定器が撮像されるべき各々の距離像のための複数の当該個別測定を実施するように構成され、かつ、該個別測定において、いずれも、それぞれのスタートパルス(14)から導出された論理スタートパルス(73)と少なくとも1つの論理受信パルス(79)とを含むパルスチェーン(80)が処理されること、
前記時間測定器が、
−それぞれ正しい時間に前記スタートパルス(73)と前記受信パルス(79)とを編成するように構成された、パルスチェーン(80)を形成する装置(20)と、
−それぞれ前記スタートパルス(73)と前記受信パルス(79)とを処理するために形成された多数の時間測定チャネルと、
−予め決定可能な測定プロシージャに従って前記時間測定チャネル全体に前記パルスチェーン(80)を分配するために形成された装置(21)と、
−前記時間測定チャネルのために既知の周波数のクロックパルスを供給する中央クロック(33)と、
−それぞれ受信パルス(79)まで経過する持続時間を算出するように構成され、かつ、それぞれ少なくとも、前記スタートパルス(73)を基準にして、それぞれの前記受信パルス(79)まで経過する各々のアップ事象(81)及び/又は各々のダウン事象(82)に関する前記中央クロック(33)の前記クロックパルスをカウントする少なくとも1つのカウンタ(23)を含む装置と、
−前記カウント結果をそれぞれの時間情報を考慮するユニットに事象リストとして記憶する装置と、
−全ての時間測定チャネルの前記格納事象リストを読み出して、評価し、事象リストに含まれた前記時間情報を前記距離画素に対応する距離値に変換する装置と、
を含むこと、
を特徴とする装置。
【請求項35】
請求項34に記載の装置において、前記送信器(2)に対応した前記装置の前記基準(5)がそれぞれ、前記論理受信パルス(79)がエコーパルス(1)とノイズパルス(76)とに還元されるようにして前記ノイズ中に配置され、前記装置がそれぞれ少なくとも1つの比較器(4)又は少なくとも1つの制限増幅器を含むことを特徴とする装置。
【請求項36】
請求項34又は35に記載の装置において、各々の時間測定チャネルが2ブランチに分割され、一方のブランチは前記アップ事象(81)の処理のために、他方のブランチは前記ダウン事象(82)の処理のために設けられることを特徴とする装置。
【請求項37】
請求項34〜36のいずれか一項に記載の装置において、持続時間を算出するための装置がそれぞれ、経過した前記クロックパルスの総期間をカウントすると共に、前記アップ事象(81)の時点及び/又は前記ダウン事象(82)の時点に過大にカウントされた前記部分期間(85、88)を算出するように構成されていることを特徴とする装置。
【請求項38】
請求項37に記載の装置において、前記部分期間(85、88)の算出のため、装置がそれぞれ前記部分期間パルス(84、87)の形成手段と、前記部分期間パルス(84、87)の遅延手段と、前記部分期間パルス(84、87)のパルス幅の算出手段とを含むことを特徴とする装置。
【請求項39】
請求項38に記載の装置において、前記部分期間パルス(84、87)の形成のためにセパレータ(22)が設けられることを特徴とする装置。
【請求項40】
請求項37〜39のいずれか一項に記載の装置において、前記部分期間パルス(84、87)の測定のためにTDC(時間−デジタル変換器)が設けられ、及び/又は、前記部分期間パルス(84、87)の測定のために、遅延素子を含む、特に、直列に接続されて、既定の遅延時間を有する、複数のインバータ又はダブルインバータの形の遅延アレイ(24)が設けられ、更に、それぞれ部分期間(85、88)に経過した遅延時間の数を示すカウント結果を特に2進コード化された情報に変換するように構成されたデコーダ(25)が設けられることを特徴とする装置。
【請求項41】
請求項40に記載の装置において、前記デコーダ(25)の前記コード化された情報を一時的に記憶するように構成されたラッチアレイが設けられることを特徴とする装置。
【請求項42】
請求項34〜41のいずれか一項に記載の装置において、
撮像されるべき各々の距離像のために形成された前記パルスチェーン(80)を事前決定可能な測定プロシージャに従って時間測定チャネル・アレイに分配するように構成された前記装置(21)が、好ましくはそれぞれ選択可能な、以下の測定モードつまり、
(i)処理されるべき前記パルスチェーン(80)は装置特にマルチプレクサ装置によりグループで逐次に時間測定チャネルに供給される測定モード、
(ii)パルスチェーン(80)のパルスは直列に処理され、前記パルスチェーン(80)の少なくとも2パルスが異なる時間測定チャネルで処理されるようにして、複数の時間測定チャネル全体に分配される測定モード、
(iii)パルスチェーン(80)は複数の時間測定チャネルで並列に処理され、好ましくは、前記中央クロック(33)のクロックパルスを位相変位させて前記時間測定チャネルに供給する装置が設けられる測定モード、
(iv)同じ送信器/受信器対から生ずる、従って同じ距離画素に関する複数の個別測定は1個別測定(いわゆる「バースト」測定)のように一緒に処理される測定モード
の少なくとも1測定モードで動作可能であることを特徴とする装置。
【請求項43】
請求項34〜42のいずれか一項に記載の装置において、時間測定チャネルの数が前記受信器(2)の数よりも小さいことを特徴とする装置。
【請求項44】
請求項34〜43のいずれか一項に記載の装置において、前記時間測定の枠組みを制御するように構成された前記測定プロシージャ制御装置(17)が設けられることを特徴とする装置。
【請求項45】
請求項34〜44のいずれか一項に記載の装置において、前記時間測定チャネルにおける持続時間の算出を測定プロシージャ制御(17)に応じて制御するように構成された前記時間測定制御装置(29)が設けられることを特徴とする装置。
【請求項46】
請求項34〜45のいずれか一項に記載の装置において、
前記時間測定器が、少なくとも1つのアレイを形成する複数の時間測定チャネル、特に
−前記それぞれの受信パルス(79)まで、経過したクロックパルスの総期間をカウントするカウンタ(23)と、
−前記部分期間パルス(84、87)を形成するためのセパレータ(22)と、
−部分期間パルス(84、87)の遅延のための遅延アレイ(24)と、
−部分期間(85、88)に経過した遅延時間の数を特に2進コード化された情報に具体化するためのデコーダ(25)と、
−前記デコーダ(25)のコード化された情報を一時的に記憶するためのラッチアレイと、
−メモリ領域(26)と、
−前記メモリ領域(26)に対応したインタフェース(27)と
が組み込まれた少なくとも1ICモジュール(32)を含むことを特徴とする装置。
【請求項47】
請求項46に記載の装置において、前記時間測定チャネルに加えて、それぞれ、前記パルスチェーン(80)を形成するための前記装置、前記パルスチェーン(80)を分配するための前記装置及び前記時間測定制御のための装置の少なくとも一部が前記ICモジュール(32)に組み込まれることを特徴とする装置。
【請求項48】
請求項46又は47に記載の装置において、前記送信アレイ(130)、前記受信アレイ(125)、前記測定プロシージャ制御装置(17)、処理されるべき前記パルスチェーン(80)をグループで供給するための装置特にマルチプレクサ装置、前記中央クロック(33)及び/又は全ての時間測定チャネルの前記格納事象リストを読出して評価するためのマイクロプロセッサシステム(28)が前記ICモジュール(32)とは別個に設けられることを特徴とする装置。
【請求項49】
請求項34〜48のいずれか一項に記載の装置において、前記時間測定器が、同じ送信器/受信器対から生ずる、従って同じ距離画素に関する複数の個別測定値を加算平均するように構成されることを特徴とする装置。
【請求項50】
請求項34〜49のいずれか一項に記載の装置において、時間測定器が、全ての時間測定チャネルの格納事象リストを読み出して、事象リストに含まれた前記時間情報を前記距離画素に対応する距離値に変換するように構成されたマイクロプロセッサ(28)を含むことを特徴とする装置。
【請求項51】
請求項50に記載の装置において、
前記マイクロプロセッサ(28)が
−同じ送信器/受信器対から逐次に生ずる、従って同じ距離画素に関する複数の個別測定値を、少なくとも1時間パターンメモリを使用しながら加算平均し、
−前記個別測定値の加算平均に続いて、前記時間パターンメモリの内容を積分して振幅関数とし、
−検出閾値を前記振幅関数に適用し、
−それぞれ、前記検出閾値が通過される少なくとも1つの時点を基礎として、当該物体距離をエコーパルス(1)の振幅関数で算出する
ように構成されること、
を特徴とする装置。
【請求項52】
請求項34〜51のいずれか一項に記載の装置において、前記送信アレイ(130)の前記送信器(15)が、それぞれ送信電磁波が個別送信空間角(131a)で送信されるように構成、配置され、前記個別送信空間角(131a)が組み合わさって総送信空間角(130a)を形成し、前記受信アレイ(125)の前記受信器(2)がそれぞれ単一の受信空間角(126a)からの反射電磁波が受信されるように構成、配置され、前記個別受信空間角(126a)が組み合わさって前記総受信空間角(125a)を形成し、前記総受信空間角(125a)が総送信空間角(130a)を含み、前記個別受信空間角(126a)と個別送信空間角(131a)との互いに区別可能なオーバラップが存在し、各々のオーバラップが距離画素に対応することを特徴とする装置。
【請求項53】
請求項52に記載の装置において、前記送信アレイ(130)の前記送信器(15)の投射電磁波が前記総送信空間角(130a)内の少なくとも1本の線上、好ましくは単一の線上にあることを特徴とする装置。
【請求項54】
請求項34〜53のいずれか一項に記載の装置において、前記送信アレイ(130)の前記送信器(15)、特に、好ましくはレーザダイオード(10)によって形成された前記送信器(15)の活性送信面(131)が少なくとも1本の線上、好ましくは単一の線上にあることを特徴とする装置。
【請求項55】
請求項34〜54のいずれか一項に記載の装置において、前記受信アレイ(125)の前記受信器(2)、特に、好ましくはフォトダイオードによって形成された前記受信器(2)の前記活性検出面(126)が少なくとも1本の線上、好ましくは単一の線上にあることを特徴とする装置。
【請求項56】
請求項34〜55のいずれか一項に記載の装置において、前記送信アレイ(130)及び/又は前記受信アレイ(125)の各々が、それぞれの前記活性面(131、126)を距離場に投影する光投射系(47、48)を含むことを特徴とする装置。
【請求項57】
請求項34〜56のいずれか一項に記載の装置において、前記受信器(2)特に前記受信器(2)の活性検出面(126)を互いに絶縁させることのできるシャドーマスク(134)が前記受信アレイ(125)の前に配置されることを特徴とする装置。
【請求項58】
請求項57に記載の装置において、前記シャドーマスク(134)が前記受信アレイ(125)特に前記受信器(2)の前記活性検出面(126)のキャリアに直接に付されるか、又は前記受信アレイ(125)から離間して配置されることを特徴とする装置。
【請求項59】
請求項57又は58に記載の装置において、前記シャドーマスク(134)が前記受信器(2)の前記光投射系(48)の焦点面に配置されることを特徴とする装置。
【請求項60】
請求項34〜59のいずれか一項に記載の装置において、前記送信アレイ(130)及び/又は前記受信アレイ(125)が複数の部分アレイを含み、少なくとも1シャドーマスク(134)が前記部分アレイの編成のために設けられ、前記シャドーマスクは前記送信器(15)の間特に前記送信器(15)の前記活性送信面(131)の間及び/又は前記受信器(2)の間特に前記受信器(2)の前記活性検出面(126)の間に存在するギャップ(128、133)が少なくとも部分的に閉じられるように構成され、配置されることを特徴とする装置。
【請求項61】
請求項34〜60のいずれか一項に記載の装置において、撮像線を空間内で運動させるため、少なくとも1軸を中心にして傾倒、回旋又は回転可能な少なくとも1電磁波偏向ユニット(50)が設けられ、特に前記電磁波偏向ユニット(50)が少なくとも1偏向鏡(51)、好ましくは多面鏡を含むことを特徴とする装置。
【請求項62】
請求項61に記載の装置において、傾倒、回旋、又は回転可能な前記2電磁波偏向ユニット(50)が設けられ、前記ユニットの軸が互いに直角をなして延びていることを特徴とする装置。
【請求項63】
請求項1〜33のいずれか一項記載の方法に従って動作させられることを特徴とする、請求項34〜62のいずれか一項に記載の装置。
【請求項64】
請求項1〜33のいずれか一項記載の方法を実施するための及び/又は請求項34〜63のいずれか一項記載の装置のための時間測定器を含んでなるICモジュールであって、アレイを形成する少なくとも複数の時間測定チャネル、特に、
−前記それぞれの受信パルス(79)まで、経過したクロックパルスの総期間をカウントするためのカウンタ(23)と、
−部分期間パルス(84、87)を形成するためのセパレータ(22)と、
−前記部分期間パルス(84、87)の遅延のための遅延アレイ(24)と、
−部分期間(85、88)に経過した遅延時間の数を特に2進コード化された情報に具体化するためのデコーダ(25)と、
−前記デコーダ(25)のコード化された情報を一時的に記憶するためのラッチアレイと、
−メモリ領域(26)と、
−前記メモリ領域(26)に対応したインタフェース(27)と、
が組み込まれたICモジュール。
【請求項65】
請求項64に記載のICモジュールにおいて、前記時間測定チャネルに加えて、それぞれ、前記パルスチェーン(80)を形成するための前記装置(20)、前記パルスチェーン(80)を分配するための前記装置(21)及び/又は時間測定制御のための装置(29)の少なくとも一部が前記ICモジュール(32)に組み込まれていることを特徴とするICモジュール。
【請求項1】
距離画素を含む多数の距離像を撮像するための方法であって、
撮像されるべき各々の距離像のためにアレイ(130)配置された複数の送信器(15)を使用して電磁波がそれぞれ送信パルス(14)の形で送信され、かつ、反射されたエコーパルス(1)がアレイ(125)配置された複数の受信器(2)を使用して検出され、かつ、前記送信パルス(14)が反射されて距離画素を形成する物体のそれぞれの距離がパルス飛行時間の算出によって測定されること、
撮像されるべき各々の距離像のために前記受信アレイ(125)の後に接続された時間測定器を使用して複数の個別測定が実施され、かつ、該個別測定において、それぞれの前記送信パルス(14)から導出された論理スタートパルス(73)と、エコーパルス(1)又はノイズパルス(76)から形成された少なくとも1つの論理受信パルス(79)とを含むそれぞれのパルスチェーンが処理されること、
前記論理受信パルス(79)がそれぞれ前記受信器(2)の少なくとも1つの基準(5)によって生成され、かつ、前記基準が下側のエコーパルス又はノイズパルスによって突破され、かつ、前記受信パルスの正のフランクを形成する前記基準(5)の超過がアップ事象(81)を定義し、かつ、前記受信パルスの負のフランクを形成する前記基準以下への下降がダウン事象(82)を定義すること、
撮像されるべき各々の距離像のために、
−前記スタートパルス(73)と当該受信パルス(79)とがそれぞれ正しい時間で組み合わされて当該パルスチェーン(80)が形成され、かつ
−上記のようにして形成された前記パルスチェーン(80)が、予め設定可能な測定プロシージャに従って、前記時間測定器によって形成された時間測定チャネル・アレイ全体に分配され、かつ
−各々の時間測定チャネルのために、
−それぞれ前記スタートパルス(73)の前の時点を基準として、受信パルス(79)まで経過する持続時間が、各々のアップ事象(81)及び/又は各々のダウン事象(82)につき、既知の周波数で中央クロック(33)によって可用化される少なくとも前記それぞれのクロックパルスがカウントされるようにして算出され、
−前記カウント結果がそれぞれの時間情報を考慮するユニットに事象リストとして記憶されること、及び
全ての時間測定チャネルの前記記憶された事象リストが読み出されて評価され、該事象リストに含まれるそれぞれの時間情報を前記距離画素に対応する距離値に変換すること、
を特徴とする方法。
【請求項2】
請求項1に記載の方法において、前記受信器(2)の前記基準(5)がそれぞれ、前記論理受信パルス(79)がエコーパルスとノイズパルスに還元されるようにして、ノイズ中に配置されることを特徴とする方法。
【請求項3】
請求項1又は2に記載の方法において、受信パルス(79)の前記処理がそれぞれ予め設定可能なスタートパルス(73)後の時点まで抑制され、前記スタートパルス(73)がそれによって生ずる時間ギャップに前記パルスチェーン(80)の形成時に正しい時間で配されることを特徴とする方法。
【請求項4】
請求項1〜3のいずれか一項に記載の方法において、各々の時間測定チャネルが2ブランチに分割され、前記アップ事象(81)は一方のブランチで測定され、前記ダウン事象(82)は他方のブランチで測定されることを特徴とする方法。
【請求項5】
請求項1〜4のいずれか一項に記載の方法において、持続時間の算出のため、それぞれ、経過したクロックパルスの総期間がカウントされると共に、前記アップ事象(81)の時点まで及び/又は前記ダウン事象(82)の時点までそれぞれ過大にカウントされた部分期間(85、88)が算出されて、各々のアップ事象(81)及び/又は各々のダウン事象(82)につき2部分結果が得られることを特徴とする方法。
【請求項6】
請求項5に記載の方法において、
前記部分期間(85、88)がTDC(時間−デジタル変換器)によって測定され、及び/又は、
前記部分期間(85、86)がそれぞれ予め設定された遅延時間の倍数として測定されて、経過した総クロックパルス期間の数を示す第1のカウント結果が得られると共に、部分期間(85、88)に経過した遅延時間の数を示す第2のカウント結果が各々のアップ事象(81)及び/又は各々のダウン事象(82)について得られることを特徴とする方法。
【請求項7】
請求項6に記載の方法おいて、前記遅延時間が、予め設定された遅延時間における望ましくない変化を補償するため、前記中央クロック(33)の期間を基準にしてキャリブレーションされることを特徴とする方法。
【請求項8】
請求項1〜7のいずれか一項に記載の方法において、撮像されるべき各々の距離像のために多数の時間測定チャネルが設けられ、前記数が処理されるべき前記パルスチェーン(80)の数より小さく、処理されるべき前記パルスチェーン(80)がグループで逐次に時間測定チャネルに供給されることを特徴とする方法。
【請求項9】
請求項1〜8のいずれか一項に記載の方法において、パルスチェーン(80)の前記パルスが多数の時間測定チャネルに分配されて、前記パルスチェーン(80)の少なくとも2パルスが異なる時間測定チャネルで処理されることを特徴とする方法。
【請求項10】
請求項1〜9のいずれか一項に記載の方法において、パルスチェーン(80)が複数の時間測定チャネルで並列に処理され、前記中央クロック(33)の前記クロックパルスが好ましくは位相変位されて前記時間測定チャネルに供給されることを特徴とする方法。
【請求項11】
請求項1〜10のいずれか一項に記載の方法において、それぞれ、同じ送信器/受信器対から生ずる、従って同じ距離画素に関する複数の個別測定が、いわゆる「バースト」測定を実施するための1個別測定のように一緒に処理されるが、前記処理に続く評価においては再び別個に扱われることを特徴とする方法。
【請求項12】
請求項1〜11のいずれか一項に記載の方法において、特に、相応して設定された受信基準(5)、特に4.5NEPより大きい値に設定された基準により、エコーパルス(1)に加えてノイズパルス(76)が存在する場合には、同じ送信器/受信器対から逐次に生ずる、従って同じ距離画素に関する複数の個別測定値は加算平均されることを特徴とする方法。
【請求項13】
請求項1〜12のいずれか一項に記載の方法において、特にいわゆる「バースト」測定の場合に、前記個別測定値の加算平均のために、
−時間ウィンドウが対応する複数のメモリセルに区分された少なくとも1個の時間パターンメモリが可用化され、
−前記中央クロック(33)の総クロックパルスの持続時間又は遅延時間の前記持続時間に一致する時間ウィンドウで、前記クロックパルス及び前記部分期間(85、88)がそれぞれこれら時間の倍数として測定され、
−前記個別測定の前記事象リストが、アップ事象(81)は正として、ダウン事象(82)は負として評価され、或いはその逆の形で評価されるようにして、同じ時間パターンメモリに逐次に転送され、
−前記受信基準(5)の突破数が各々の時間ウィンドウにつき加算平均時に積算される
こと、
を特徴とする方法。
【請求項14】
請求項13に記載の方法において、前記個別測定値の加算平均に続いて、前記時間パターンメモリの内容が積分されて振幅関数とされ、検出閾値が前記振幅関数に適用され、当該物体距離がそれぞれ、前記検出閾値が突破される少なくとも1つの時点を基礎として、エコーパルス(1)の前記振幅関数で算出されることを特徴とする方法。
【請求項15】
請求項13又は14に記載の方法おいて、前記対応するエコーパルス(1)の電力の尺度を表す前記パルス幅が、特に、前記検出閾値が突破、特に超過される時点の補正によって、前記振幅関数のエラー補償に使用されることを特徴とする方法。
【請求項16】
請求項13〜15のいずれか一項に記載の方法において、前記積分がもっぱらそれぞれ経過クロックパルス数を表す時間パターンメモリのカウント値につき実施されるようにして粗振幅関数が算出され、エコーパルスに還元される特別な部分範囲が前記粗振幅関数を基準にして識別され、前記時間パターンメモリの内容の前記積分が前記振幅関数の前記識別された部分範囲につきもっぱら実施されることを特徴とする方法。
【請求項17】
請求項14〜16のいずれか一項に記載の方法において、検出閾値が前記受信基準(5)に応じて、特に、4.5NEPの値に対する前記受信基準(5)の低下の尺度に応じて設定されることを特徴とする方法。
【請求項18】
請求項1〜17のいずれか一項に記載の方法において、少なくとも1受信器(2)の前記基準(5)が受信器(2)で測定された距離に応じて変化し、特に、距離が減少するにつれて低下することを特徴とする方法。
【請求項19】
請求項1〜18のいずれか一項に記載の方法において、
前記送信アレイ(130)の前記送信器(15)が送信電磁波を個別送信空間角(131a)に行き渡らせ、前記個別送信空間角(131a)が組み合わさって総送信空間角(130a)を形成し、
前記受信アレイ(125)の前記受信器(2)が個別受信空間角(126a)から前記反射電磁波を受信し、前記個別受信空間角(126a)が組み合わさって総受信空間角(125a)を形成し、前記総受信空間角(125a)が前記総送信空間角(130a)を含み、前記個別受信空間角(126a)と個別送信空間角(131a)との互いに区別可能なオーバラップが存在し、各々のオーバラップが距離画素に対応し、
前記オーバラップが前記時間測定器での測定のためにグループ化されて、互いに区別可能な距離画素を形成すること、
を特徴とする、方法。
【請求項20】
請求項19に記載の方法において、グループ化が空間的及び/又は時間的な関連で行われ、複数の個別受信空間角(126a)が1個別送信空間角(131a)とオーバラップしている場合には、空間的グループ化が行われて、前記受信器(2)が時間的に並列に作動し、1個別受信空間角(126a)が複数の個別送信空間角(131a)とオーバラップしている場合には、時間的グループ化が行われて、前記送信器が時間的に逐次に活性化されることを特徴とする方法。
【請求項21】
請求項19又は20に記載の方法において、送信器(15)の全体として検出可能な電磁波を表す前記区別可能な距離画素がグループ化されて、サブグループを形成し、
前記グループ内に存在する前記区別可能な前記距離画素の数が前記時間測定器の前記時間測定チャネルの数にせいぜい等しいだけの数のサブグループがグループ化されて、1グループを形成することを特徴とする方法。
【請求項22】
請求項19〜21のいずれか一項に記載の方法において、前記全体として存在する区別可能な距離画素の数と前記時間測定チャネルの数との関係に応じ、全体として存在する区別可能な距離画素にとって時間測定チャネルの数が不十分であれば、前記グループは前記時間測定チャネルで逐次に処理され、又は、前記全体として存在する区別可能な距離画素にとって十分な時間測定チャネルが存在する場合には、並列に処理されることを特徴とする方法。
【請求項23】
請求項1〜22のいずれか一項に記載の方法において、特に、前記妨害電磁波部の前記抑制のため及び/又は前記ダイナミックレンジの低下のために、前記受信器(2)、特に前記受信器(2)の前記活性検出面(126)が、特に前記受信器(2)の前に配されたシャドーマスク(134)によってマスクされることを特徴とする方法。
【請求項24】
請求項1〜23のいずれか一項に記載の方法において、前記受信器(2)の前に配されるシャドーマスク(134)が前記受信器(2)の光投射系(47)の焦点面に配置されることを特徴とする方法。
【請求項25】
請求項1〜24のいずれか一項に記載の方法において、前記距離画素によって形成された、特に線状又はストリップ形の撮像面が空間を運動させられ、前に配されたシャドーマスク(134)の孔が各々の受信器(2)に対応させられ、前記孔が撮像面の運動方向において前記受信器(2)よりも、特に前記受信器(2)の前記活性検出面(126)よりも小さく、分解能を高めるために複数の送信器(15)が前記受信器(2)に対応させられ、前記送信器が撮像面の運動に応じて逐次に活性化されることを特徴とする方法。
【請求項26】
請求項23〜25のいずれか一項に記載の方法。において、前記受信器(2)がそれぞれ撮像面の運動方向において前に配された前記シャドーマスク(134)の孔の数よりも整数倍だけ大きく、それぞれ前記受信器(2)に対応した前記送信器(15)の数が該整数倍に等しいことを特徴とする方法。
【請求項27】
請求項1〜26のいずれか一項に記載の方法において、複数の送信部分アレイ及び/又は複数の受信部分アレイが、前記送信器(15)の間特に送信器(15)の前記活性送信面(131)の間及び/又は前記受信器(2)の間特に前記受信器(2)の前記活性検出面(126)の間に存在するギャップ(128、133)が少なくとも部分的に閉じられるようにして、シャドーマスク(134)によって編成されることを特徴とする方法。
【請求項28】
請求項1〜27のいずれか一項に記載の方法において、前記送信アレイ(130)の前記送信器(15)の電磁波が、前記送信空間角の全体(130a)において、前記送信された電磁波が少なくとも1撮像線、好ましくは単一の撮像線に配されるようにして、送信されることを特徴とする方法。
【請求項29】
請求項1〜28のいずれか一項に記載の方法において、前記距離画素によって形成された、特に線状又はストリップ形の撮像面が空間を、特に装置と共に、特に例えば車両又は航空機の形の可動キャリア(65、66、70)に取り付けられた装置により全体として運動させられ、及び/又は、少なくとも1電磁波偏向ユニット(50)、特に少なくとも1つの軸を中心に回旋、回転又は傾倒可能な少なくとも1偏向鏡により、前記装置に対して相対運動させられることを特徴とする方法。
【請求項30】
請求項29に記載の方法において、前記撮像面が、傾倒軸、回旋軸又は回転軸が互いに直交して延びる2電磁波偏向ユニット(50)により空間内を可動することを特徴とする方法。
【請求項31】
請求項29又は30に記載の方法において、前記撮像面が線状又はストリップ形であり、前記撮像面がその長手伸長方向(63)に、及び/又は該方向に対して垂直方向に運動させられることを特徴とする方法。
【請求項32】
請求項1〜31のいずれか一項に記載の方法において、前記撮像距離像で所定の物体が評価ソフトウェアによって探索され(物体認識)、見出された前記物体が逐次撮像距離像を使用して追跡され(物体追跡)、プラント(70)が前記物体認識及び/又は物体追跡の結果に応じて制御ソフトウェアによって制御されることを特徴とする方法。
【請求項33】
請求項1〜32のいずれか一項に記載の方法において、請求項34〜63のいずれか一項に記載の装置が使用されることを特徴とする方法。
【請求項34】
距離画素を含む多数の距離像を撮像するための装置であって、
−送信パルス(14)の形で電磁波を送信するためのアレイ(130)配置された複数の送信器(15)と、
−反射されたエコーパルス(1)を検出するためのアレイ(125)配置された複数の受信器(2)であって、
エコーパルス(1)及びノイズパルス(76)を含むアナログ受信信号(77)を生成する増幅器(3)と、少なくとも1つの基準(5)を有する装置とが各々の受信器(2)に関連付けられ、かつ、前記基準により、それぞれ前記基準(5)を超える、エコーパルス(1)又はノイズパルス(76)に還元される一連の論理受信パルス(79)が前記アナログ受信信号(77)から生成され、かつ、前記受信パルスの正のフランクを形成する前記基準(5)の超過がアップ事象(81)を定義し、前記受信パルスの負のフランクを形成する前記基準以下への下降がダウン事象(82)を定義するものと、
−前記送信パルス(14)が反射される、それぞれ距離画素を形成する物体の距離をパルス飛行時間の算出によって測定する、前記受信アレイ(125)の後に配置された時間測定器とを含むこと、
前記時間測定器が撮像されるべき各々の距離像のための複数の当該個別測定を実施するように構成され、かつ、該個別測定において、いずれも、それぞれのスタートパルス(14)から導出された論理スタートパルス(73)と少なくとも1つの論理受信パルス(79)とを含むパルスチェーン(80)が処理されること、
前記時間測定器が、
−それぞれ正しい時間に前記スタートパルス(73)と前記受信パルス(79)とを編成するように構成された、パルスチェーン(80)を形成する装置(20)と、
−それぞれ前記スタートパルス(73)と前記受信パルス(79)とを処理するために形成された多数の時間測定チャネルと、
−予め決定可能な測定プロシージャに従って前記時間測定チャネル全体に前記パルスチェーン(80)を分配するために形成された装置(21)と、
−前記時間測定チャネルのために既知の周波数のクロックパルスを供給する中央クロック(33)と、
−それぞれ受信パルス(79)まで経過する持続時間を算出するように構成され、かつ、それぞれ少なくとも、前記スタートパルス(73)を基準にして、それぞれの前記受信パルス(79)まで経過する各々のアップ事象(81)及び/又は各々のダウン事象(82)に関する前記中央クロック(33)の前記クロックパルスをカウントする少なくとも1つのカウンタ(23)を含む装置と、
−前記カウント結果をそれぞれの時間情報を考慮するユニットに事象リストとして記憶する装置と、
−全ての時間測定チャネルの前記格納事象リストを読み出して、評価し、事象リストに含まれた前記時間情報を前記距離画素に対応する距離値に変換する装置と、
を含むこと、
を特徴とする装置。
【請求項35】
請求項34に記載の装置において、前記送信器(2)に対応した前記装置の前記基準(5)がそれぞれ、前記論理受信パルス(79)がエコーパルス(1)とノイズパルス(76)とに還元されるようにして前記ノイズ中に配置され、前記装置がそれぞれ少なくとも1つの比較器(4)又は少なくとも1つの制限増幅器を含むことを特徴とする装置。
【請求項36】
請求項34又は35に記載の装置において、各々の時間測定チャネルが2ブランチに分割され、一方のブランチは前記アップ事象(81)の処理のために、他方のブランチは前記ダウン事象(82)の処理のために設けられることを特徴とする装置。
【請求項37】
請求項34〜36のいずれか一項に記載の装置において、持続時間を算出するための装置がそれぞれ、経過した前記クロックパルスの総期間をカウントすると共に、前記アップ事象(81)の時点及び/又は前記ダウン事象(82)の時点に過大にカウントされた前記部分期間(85、88)を算出するように構成されていることを特徴とする装置。
【請求項38】
請求項37に記載の装置において、前記部分期間(85、88)の算出のため、装置がそれぞれ前記部分期間パルス(84、87)の形成手段と、前記部分期間パルス(84、87)の遅延手段と、前記部分期間パルス(84、87)のパルス幅の算出手段とを含むことを特徴とする装置。
【請求項39】
請求項38に記載の装置において、前記部分期間パルス(84、87)の形成のためにセパレータ(22)が設けられることを特徴とする装置。
【請求項40】
請求項37〜39のいずれか一項に記載の装置において、前記部分期間パルス(84、87)の測定のためにTDC(時間−デジタル変換器)が設けられ、及び/又は、前記部分期間パルス(84、87)の測定のために、遅延素子を含む、特に、直列に接続されて、既定の遅延時間を有する、複数のインバータ又はダブルインバータの形の遅延アレイ(24)が設けられ、更に、それぞれ部分期間(85、88)に経過した遅延時間の数を示すカウント結果を特に2進コード化された情報に変換するように構成されたデコーダ(25)が設けられることを特徴とする装置。
【請求項41】
請求項40に記載の装置において、前記デコーダ(25)の前記コード化された情報を一時的に記憶するように構成されたラッチアレイが設けられることを特徴とする装置。
【請求項42】
請求項34〜41のいずれか一項に記載の装置において、
撮像されるべき各々の距離像のために形成された前記パルスチェーン(80)を事前決定可能な測定プロシージャに従って時間測定チャネル・アレイに分配するように構成された前記装置(21)が、好ましくはそれぞれ選択可能な、以下の測定モードつまり、
(i)処理されるべき前記パルスチェーン(80)は装置特にマルチプレクサ装置によりグループで逐次に時間測定チャネルに供給される測定モード、
(ii)パルスチェーン(80)のパルスは直列に処理され、前記パルスチェーン(80)の少なくとも2パルスが異なる時間測定チャネルで処理されるようにして、複数の時間測定チャネル全体に分配される測定モード、
(iii)パルスチェーン(80)は複数の時間測定チャネルで並列に処理され、好ましくは、前記中央クロック(33)のクロックパルスを位相変位させて前記時間測定チャネルに供給する装置が設けられる測定モード、
(iv)同じ送信器/受信器対から生ずる、従って同じ距離画素に関する複数の個別測定は1個別測定(いわゆる「バースト」測定)のように一緒に処理される測定モード
の少なくとも1測定モードで動作可能であることを特徴とする装置。
【請求項43】
請求項34〜42のいずれか一項に記載の装置において、時間測定チャネルの数が前記受信器(2)の数よりも小さいことを特徴とする装置。
【請求項44】
請求項34〜43のいずれか一項に記載の装置において、前記時間測定の枠組みを制御するように構成された前記測定プロシージャ制御装置(17)が設けられることを特徴とする装置。
【請求項45】
請求項34〜44のいずれか一項に記載の装置において、前記時間測定チャネルにおける持続時間の算出を測定プロシージャ制御(17)に応じて制御するように構成された前記時間測定制御装置(29)が設けられることを特徴とする装置。
【請求項46】
請求項34〜45のいずれか一項に記載の装置において、
前記時間測定器が、少なくとも1つのアレイを形成する複数の時間測定チャネル、特に
−前記それぞれの受信パルス(79)まで、経過したクロックパルスの総期間をカウントするカウンタ(23)と、
−前記部分期間パルス(84、87)を形成するためのセパレータ(22)と、
−部分期間パルス(84、87)の遅延のための遅延アレイ(24)と、
−部分期間(85、88)に経過した遅延時間の数を特に2進コード化された情報に具体化するためのデコーダ(25)と、
−前記デコーダ(25)のコード化された情報を一時的に記憶するためのラッチアレイと、
−メモリ領域(26)と、
−前記メモリ領域(26)に対応したインタフェース(27)と
が組み込まれた少なくとも1ICモジュール(32)を含むことを特徴とする装置。
【請求項47】
請求項46に記載の装置において、前記時間測定チャネルに加えて、それぞれ、前記パルスチェーン(80)を形成するための前記装置、前記パルスチェーン(80)を分配するための前記装置及び前記時間測定制御のための装置の少なくとも一部が前記ICモジュール(32)に組み込まれることを特徴とする装置。
【請求項48】
請求項46又は47に記載の装置において、前記送信アレイ(130)、前記受信アレイ(125)、前記測定プロシージャ制御装置(17)、処理されるべき前記パルスチェーン(80)をグループで供給するための装置特にマルチプレクサ装置、前記中央クロック(33)及び/又は全ての時間測定チャネルの前記格納事象リストを読出して評価するためのマイクロプロセッサシステム(28)が前記ICモジュール(32)とは別個に設けられることを特徴とする装置。
【請求項49】
請求項34〜48のいずれか一項に記載の装置において、前記時間測定器が、同じ送信器/受信器対から生ずる、従って同じ距離画素に関する複数の個別測定値を加算平均するように構成されることを特徴とする装置。
【請求項50】
請求項34〜49のいずれか一項に記載の装置において、時間測定器が、全ての時間測定チャネルの格納事象リストを読み出して、事象リストに含まれた前記時間情報を前記距離画素に対応する距離値に変換するように構成されたマイクロプロセッサ(28)を含むことを特徴とする装置。
【請求項51】
請求項50に記載の装置において、
前記マイクロプロセッサ(28)が
−同じ送信器/受信器対から逐次に生ずる、従って同じ距離画素に関する複数の個別測定値を、少なくとも1時間パターンメモリを使用しながら加算平均し、
−前記個別測定値の加算平均に続いて、前記時間パターンメモリの内容を積分して振幅関数とし、
−検出閾値を前記振幅関数に適用し、
−それぞれ、前記検出閾値が通過される少なくとも1つの時点を基礎として、当該物体距離をエコーパルス(1)の振幅関数で算出する
ように構成されること、
を特徴とする装置。
【請求項52】
請求項34〜51のいずれか一項に記載の装置において、前記送信アレイ(130)の前記送信器(15)が、それぞれ送信電磁波が個別送信空間角(131a)で送信されるように構成、配置され、前記個別送信空間角(131a)が組み合わさって総送信空間角(130a)を形成し、前記受信アレイ(125)の前記受信器(2)がそれぞれ単一の受信空間角(126a)からの反射電磁波が受信されるように構成、配置され、前記個別受信空間角(126a)が組み合わさって前記総受信空間角(125a)を形成し、前記総受信空間角(125a)が総送信空間角(130a)を含み、前記個別受信空間角(126a)と個別送信空間角(131a)との互いに区別可能なオーバラップが存在し、各々のオーバラップが距離画素に対応することを特徴とする装置。
【請求項53】
請求項52に記載の装置において、前記送信アレイ(130)の前記送信器(15)の投射電磁波が前記総送信空間角(130a)内の少なくとも1本の線上、好ましくは単一の線上にあることを特徴とする装置。
【請求項54】
請求項34〜53のいずれか一項に記載の装置において、前記送信アレイ(130)の前記送信器(15)、特に、好ましくはレーザダイオード(10)によって形成された前記送信器(15)の活性送信面(131)が少なくとも1本の線上、好ましくは単一の線上にあることを特徴とする装置。
【請求項55】
請求項34〜54のいずれか一項に記載の装置において、前記受信アレイ(125)の前記受信器(2)、特に、好ましくはフォトダイオードによって形成された前記受信器(2)の前記活性検出面(126)が少なくとも1本の線上、好ましくは単一の線上にあることを特徴とする装置。
【請求項56】
請求項34〜55のいずれか一項に記載の装置において、前記送信アレイ(130)及び/又は前記受信アレイ(125)の各々が、それぞれの前記活性面(131、126)を距離場に投影する光投射系(47、48)を含むことを特徴とする装置。
【請求項57】
請求項34〜56のいずれか一項に記載の装置において、前記受信器(2)特に前記受信器(2)の活性検出面(126)を互いに絶縁させることのできるシャドーマスク(134)が前記受信アレイ(125)の前に配置されることを特徴とする装置。
【請求項58】
請求項57に記載の装置において、前記シャドーマスク(134)が前記受信アレイ(125)特に前記受信器(2)の前記活性検出面(126)のキャリアに直接に付されるか、又は前記受信アレイ(125)から離間して配置されることを特徴とする装置。
【請求項59】
請求項57又は58に記載の装置において、前記シャドーマスク(134)が前記受信器(2)の前記光投射系(48)の焦点面に配置されることを特徴とする装置。
【請求項60】
請求項34〜59のいずれか一項に記載の装置において、前記送信アレイ(130)及び/又は前記受信アレイ(125)が複数の部分アレイを含み、少なくとも1シャドーマスク(134)が前記部分アレイの編成のために設けられ、前記シャドーマスクは前記送信器(15)の間特に前記送信器(15)の前記活性送信面(131)の間及び/又は前記受信器(2)の間特に前記受信器(2)の前記活性検出面(126)の間に存在するギャップ(128、133)が少なくとも部分的に閉じられるように構成され、配置されることを特徴とする装置。
【請求項61】
請求項34〜60のいずれか一項に記載の装置において、撮像線を空間内で運動させるため、少なくとも1軸を中心にして傾倒、回旋又は回転可能な少なくとも1電磁波偏向ユニット(50)が設けられ、特に前記電磁波偏向ユニット(50)が少なくとも1偏向鏡(51)、好ましくは多面鏡を含むことを特徴とする装置。
【請求項62】
請求項61に記載の装置において、傾倒、回旋、又は回転可能な前記2電磁波偏向ユニット(50)が設けられ、前記ユニットの軸が互いに直角をなして延びていることを特徴とする装置。
【請求項63】
請求項1〜33のいずれか一項記載の方法に従って動作させられることを特徴とする、請求項34〜62のいずれか一項に記載の装置。
【請求項64】
請求項1〜33のいずれか一項記載の方法を実施するための及び/又は請求項34〜63のいずれか一項記載の装置のための時間測定器を含んでなるICモジュールであって、アレイを形成する少なくとも複数の時間測定チャネル、特に、
−前記それぞれの受信パルス(79)まで、経過したクロックパルスの総期間をカウントするためのカウンタ(23)と、
−部分期間パルス(84、87)を形成するためのセパレータ(22)と、
−前記部分期間パルス(84、87)の遅延のための遅延アレイ(24)と、
−部分期間(85、88)に経過した遅延時間の数を特に2進コード化された情報に具体化するためのデコーダ(25)と、
−前記デコーダ(25)のコード化された情報を一時的に記憶するためのラッチアレイと、
−メモリ領域(26)と、
−前記メモリ領域(26)に対応したインタフェース(27)と、
が組み込まれたICモジュール。
【請求項65】
請求項64に記載のICモジュールにおいて、前記時間測定チャネルに加えて、それぞれ、前記パルスチェーン(80)を形成するための前記装置(20)、前記パルスチェーン(80)を分配するための前記装置(21)及び/又は時間測定制御のための装置(29)の少なくとも一部が前記ICモジュール(32)に組み込まれていることを特徴とするICモジュール。
【図1】


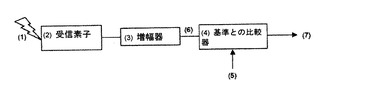
【図2】

【図3】
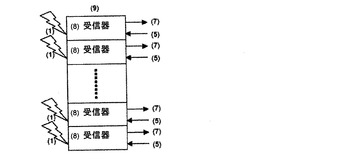
【図4】

【図5】

【図6】
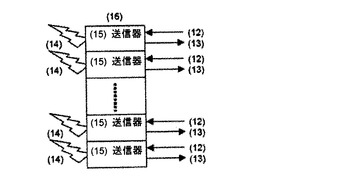
【図7】
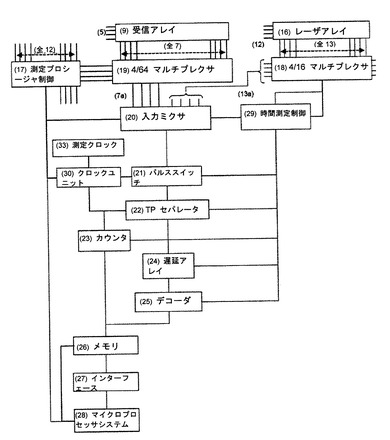
【図8a】
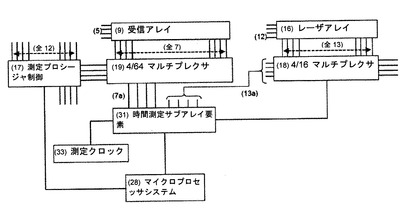
【図8b】
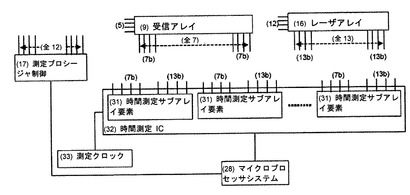
【図8c】
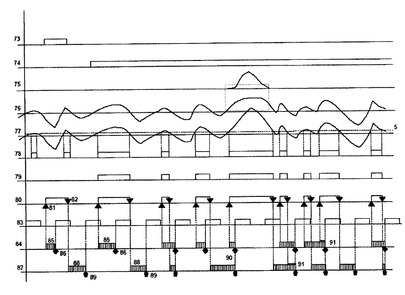
【図9】

【図9a】
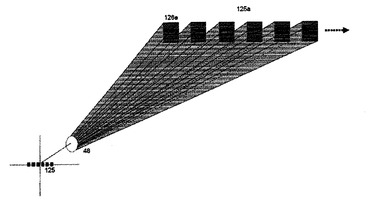
【図10】

【図10a】
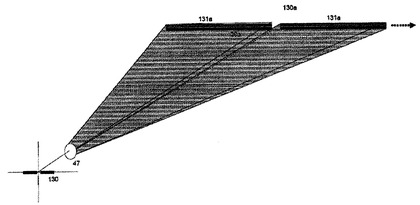
【図11】
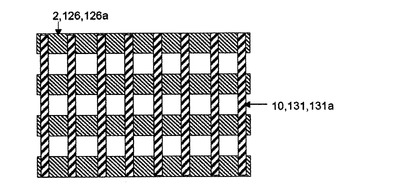
【図12】

【図12a】
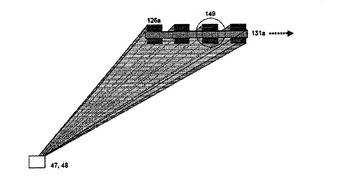
【図13】

【図14】

【図15】

【図16】
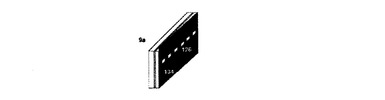
【図17】
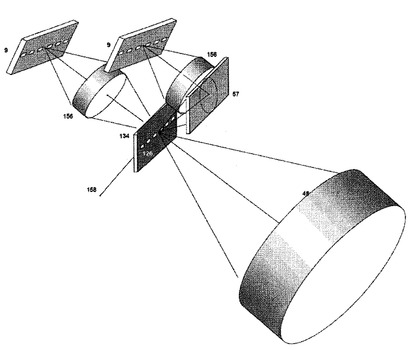
【図18】
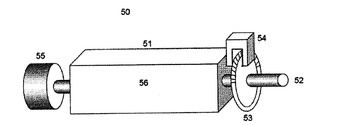
【図19】
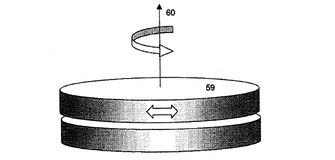
【図20】
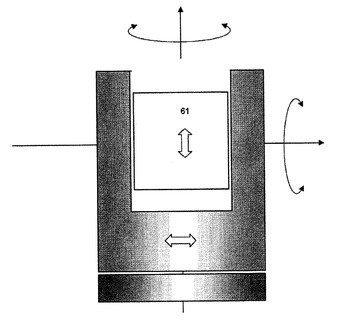
【図21】
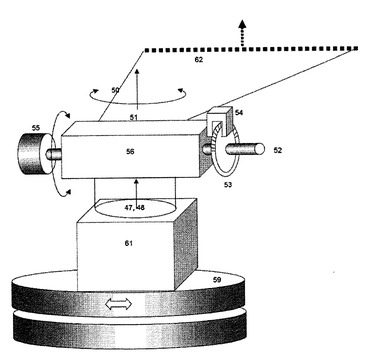
【図22】
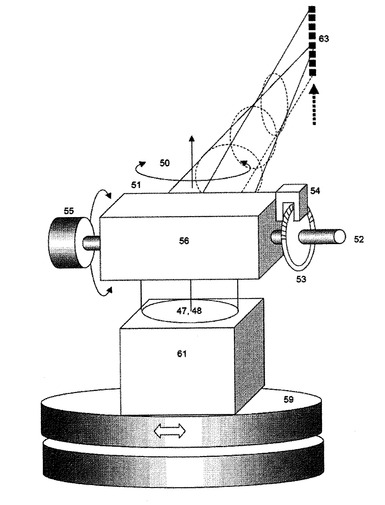
【図23】
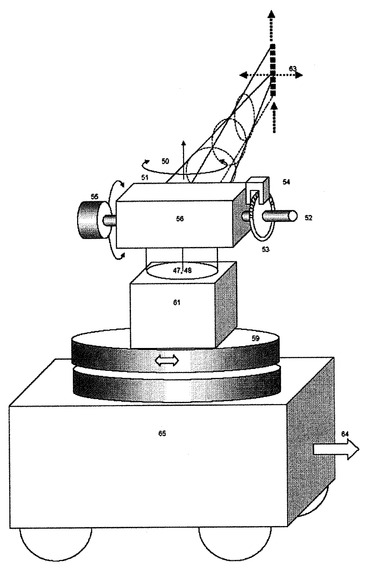
【図24】
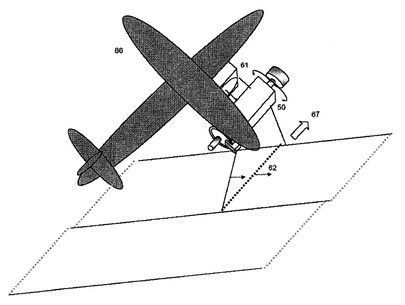
【図25】
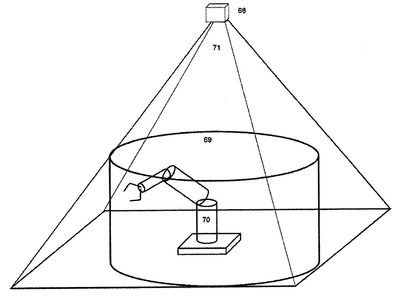
【図26】
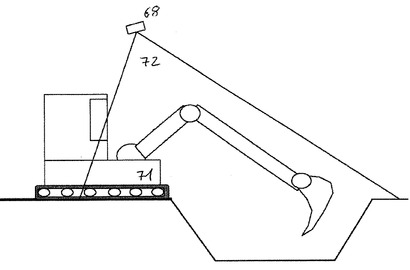
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8a】
【図8b】
【図8c】
【図9】
【図9a】
【図10】
【図10a】
【図11】
【図12】
【図12a】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2008−76390(P2008−76390A)
【公開日】平成20年4月3日(2008.4.3)
【国際特許分類】
【外国語出願】
【出願番号】特願2007−235666(P2007−235666)
【出願日】平成19年9月11日(2007.9.11)
【出願人】(506115569)トリプル−イン ホールディング アーゲー (2)
【氏名又は名称原語表記】TRIPLE−IN HOLDING AG
【住所又は居所原語表記】Baarerstrasse 75, CH−6300 Zug, Switzerland
【Fターム(参考)】
【公開日】平成20年4月3日(2008.4.3)
【国際特許分類】
【出願番号】特願2007−235666(P2007−235666)
【出願日】平成19年9月11日(2007.9.11)
【出願人】(506115569)トリプル−イン ホールディング アーゲー (2)
【氏名又は名称原語表記】TRIPLE−IN HOLDING AG
【住所又は居所原語表記】Baarerstrasse 75, CH−6300 Zug, Switzerland
【Fターム(参考)】
[ Back to top ]