
距離検出システム
【課題】測定側機器からの発呼信号とこれに対応する応答機器からの応答信号とにそれぞれ特徴を持たせることによって、応答機器までの距離の算出を可能とする。
【解決手段】測定側機器1Aは、測定側特徴量が連続的に変化する発呼信号を送信する測定側送信部11と、応答側機器から送信されてくる応答信号を受信する測定側受信部12と、受信した応答信号の応答側特徴量を解析する特徴量解析部13と、発呼信号を送信したタイミングから一定時間を計測するタイマー部14と、応答側機器から受信した応答信号の応答側特徴量の解析結果に基づいて、一定時間経過後に測定側機器1Aと応答側機器との間の距離を算出する距離算出部15と、応答側機器の応答側特徴量記憶部に記憶されている応答側特徴量を記憶する測定側特徴量記憶部16と、を備えている。
【解決手段】測定側機器1Aは、測定側特徴量が連続的に変化する発呼信号を送信する測定側送信部11と、応答側機器から送信されてくる応答信号を受信する測定側受信部12と、受信した応答信号の応答側特徴量を解析する特徴量解析部13と、発呼信号を送信したタイミングから一定時間を計測するタイマー部14と、応答側機器から受信した応答信号の応答側特徴量の解析結果に基づいて、一定時間経過後に測定側機器1Aと応答側機器との間の距離を算出する距離算出部15と、応答側機器の応答側特徴量記憶部に記憶されている応答側特徴量を記憶する測定側特徴量記憶部16と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測定側機器の発呼に対する応答側機器の応答結果に基づいて、測定側機器が応答側機器との間の距離を検出する距離検出システムに関する。
【背景技術】
【0002】
従来から、例えばテレビ受信機とリモートコントローラ(以下、リモコンと略記する)との間の距離や位置を検出する検出装置が提案されている(例えば、特許文献1,2等参照)。
【0003】
特許文献1には、電子機器本体と通信しそのチャンネル切替え等の動作を指令するリモコン等の入力装置と、電子機器本体に装備され入力装置との間で所定の情報を送受信する少なくとも2つの信号送受信部と、各信号送受信部における信号の送受信動作を制御する主制御部とを備え、各信号送受信部を所定間隔を隔てて電子機器本体上の表示部の一方の側と他方の側とに分けて設置し、各信号送受信部の内の少なくとも何れか一方が入力装置に向けて探索信号を発信する探索信号発信機能を有すると共に、入力装置は探索信号に対して応答信号を発信する応答信号発信機能を有し、主制御部は、各信号送受信部で受信される応答信号の受信タイミング及び探索信号の発信タイミングにかかる時間情報に基づいて当該各信号送受信部と入力装置との間の距離を算定すると共に入力装置の位置を特定する位置演算特定機能を備えた位置検出装置が開示されている。
【0004】
また、特許文献2には、リモコンへの信号送信を行う信号送信手段、リモコンからの信号受信を行う信号受信手段、使用者が直接操作可能な入力手段、及び、入力手段によるリモコン位置検出信号を送信する手段を備える電気機器本体と、電気機器本体からの信号受信を行う信号受信手段、電気機器本体への信号送信を行う信号送信手段、及び、リモコン位置検出信号を受信した際には直ちにリモコン位置検出確認信号を電気機器本体へ送信する手段を備えるリモコンと、により構成された電気機器において、電気機器本体は、リモコン位置検出信号を送信後から、リモコン位置検出確認信号を受信するまでの時間を計測し、この計測時間に基づいて電気機器本体とリモコンとの距離を演算するリモコン位置検出装置が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−99194号公報
【特許文献2】特開2004−304408号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1記載の位置検出装置は、2つの信号送受信部で受信される応答信号の受信タイミング及び探索信号の発信タイミングにかかる時間情報に基づいて各信号送受信部と入力装置との間の距離を算定するようになっている。すなわち、電子機器本体と入力装置との間の距離を算定するためには、少なくとも2つの信号送受信部を設ける必要があり、1つの信号送受信部だけでは距離を算定できないといった問題があった。また、探索信号や応答信号自体には特徴が無いため、信号の特徴によって距離を算出することもできないといった問題もあった。
【0007】
また、特許文献2記載のリモコン位置検出装置は、リモコン位置検出信号を送信後から、リモコン位置検出確認信号を受信するまでの時間を計測し、この計測時間に基づいて電気機器本体とリモコンとの距離を演算する構成となっているが、具体的にどのように演算するのかについては記載されていない。また、リモコン位置検出信号やリモコン位置検出確認信号自体には特徴が無いため、信号の特徴によって距離を算出することができないといった問題があった。
【0008】
本発明はかかる問題点を解決すべく創案されたもので、その目的は、測定側機器からの発呼信号とこれに対応する応答側機器からの応答信号とにそれぞれ連続的に変化する特徴量を持たせることにより、その特徴量に基づいて測定側機器から応答側機器までの距離の算出を可能とした距離検出システムを提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するため、本発明の距離検出システムは、測定側機器と応答側機器との間で信号の送受信を行うことにより、前記測定側機器の発呼に対する前記応答側機器の応答結果に基づいて、前記測定側機器が前記応答側機器との間の距離を検出する距離検出システムであって、前記応答側機器は、前記測定側機器から送信されてくる測定側特徴量が連続的に変化する発呼信号を受信する応答側受信部と、前記応答側受信部が受信した前記発呼信号の前記測定側特徴量に対応して連続的に変化する応答側特徴量を記憶する応答側特徴量記憶部と、前記応答側受信部が前記発呼信号を受信することにより、前記応答側特徴量記憶部に記憶された応答側特徴量に基づいて特徴量が連続的に変化する応答信号を送信する応答側送信部と、を備え、前記測定側機器は、前記発呼信号を送信する測定側送信部と、前記応答側機器から送信されてくる前記応答信号を受信する測定側受信部と、受信した前記応答信号の前記応答側特徴量を解析する特徴量解析部と、前記発呼信号を送信したタイミングから一定時間経過後に前記応答側機器から受信した前記応答信号の前記応答側特徴量の解析結果に基づいて、前記測定側機器と前記応答側機器との間の距離を算出する距離算出部と、を備えたことを特徴としている。ここで、前記発呼信号及び前記応答信号は電磁波または音波である。
【0010】
上記構成によれば、連続的に変化する応答信号の特徴量に基づき、特徴量がどの段階の変化であるかを解析することによって、応答側機器までの距離を正確に算出することができる。
【0011】
また、本発明では、前記測定側特徴量及び前記応答側特徴量の連続的な変化を周波数の変化としている。すなわち、発呼信号や応答信号を、例えばf0からf1,f2,f3,・・・と周波数が連続的に高くなる(若しくは低くなる)信号としている。これにより、どの周波数レベルの信号を受信したのかを判定することで、応答側機器までの距離を正確に算出することができる。
【0012】
また、本発明では、前記測定側特徴量及び前記応答側特徴量の連続的な変化を振幅の変化としている。すなわち、発呼信号や応答信号を、例えばw0からw1,w2,w3,・・・というように振幅が連続的に大きくなる(若しくは小さくなる)信号としている。これにより、どの振幅レベルの信号を受信したのかを判定することで、応答側機器までの距離を正確に算出することができる。
【0013】
また、本発明では、前記測定側特徴量及び前記応答側特徴量の連続的な変化を振幅の中心からの変化量としている。特徴量の連続的な変化を振幅中心からの変化量とすることで、1周期分のサンプリングで応答信号の特徴量を解析することができるので、解析時間を短縮することができる。
【0014】
また、本発明では、前記測定側機器は、前記応答側特徴量記憶部に記憶されている応答側特徴量を記憶する測定側特徴量記憶部を備え、前記特徴量解析部は、前記発呼信号を送信したタイミングから一定時間経過後に前記応答側機器から受信した前記応答信号の応答側特徴量と前記測定側特徴量記憶部に記憶されている応答側特徴量とを照合することによって特徴量の解析を行う構成としている。このような構成によれば、応答側特徴量の解析を確実に行うことができる。
【0015】
また、本発明では、前記測定側機器は、前記測定側受信部を複数備えるとともに、前記応答側機器の位置を特定する位置特定部を備え、前記特徴量解析部は、前記複数の測定側受信部で受信した前記複数の応答信号ごとに応答側特徴量を解析し、前記距離算出部は、前記複数の応答信号ごとの前記応答側特徴量の解析結果に基づいて、前記複数の測定側受信部と前記応答側機器との間の距離をそれぞれ算出し、前記位置特定部は、前記算出結果に基づいて前記応答側機器の位置を特定する構成としている。測定側受信部を、例えば測定側機器の正面の左右両側に2個配置する構成とすることで、両測定側受信部でそれぞれ受信する応答信号の時間差に基づいて応答側機器の位置を特定することができる。
【0016】
また、本発明では、前記応答側機器を複数備え、前記応答側機器の前記応答側特徴量記憶部に記憶されている応答側特徴量が前記応答側機器ごとに異なる設定としている。応答側特徴量記憶部に記憶されている応答側特徴量を応答側機器ごとに異なる設定とすることにより、測定側機器で複数の応答側機器を区別することができる。
【0017】
また、本発明では、前記一定時間の前後にサンプリングした応答側特徴量を記憶する特徴量記憶バッファを備え、前記距離算出部は、前記特徴量記憶バッファに記憶した応答側特徴量の差分に基づいて前記応答側機器を特定する構成としてもよい。応答側特徴量の差分とは、いわゆる信号波形の傾斜を見ることに相当し、この応答信号の傾斜の違いによって応答側機器を区別することができる。
【0018】
また、本発明では、前記測定側機器は、前記発呼信号を送信したタイミングから前記一定時間より短い所定時間の間はサンプリングを行わない、または、計測結果をマスクする構成としてもよい。発呼信号を送信したタイミングから所定時間T2の間、サンプリングを行わない、または、計測結果をマスクすることによって、発呼信号の反射や他のノイズ信号の影響等による誤検知を防止することができる。
【0019】
また、本発明では、前記測定側機器を画像形成装置本体に適用し、前記応答側機器を前記画像形成装置本体から着脱自在な操作パネル装置に適用することによって、画像形成装置にも本発明の距離検出システムを適用することが可能である。本発明によれば、画像形成装置本体から取り外した操作パネル装置の所在を容易に把握することができる。
【発明の効果】
【0020】
本発明によれば、連続的に変化する応答信号の特徴量に基づき、特徴量がどの段階の変化であるかを解析することによって、応答側機器までの距離を正確に算出することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態1に係る距離検出システムの全体構成図である。
【図2A】実施形態1に係る測定側機器の電気的構成を示す機能ブロック図である。
【図2B】実施形態1に係る応答側機器の電気的構成を示す機能ブロック図である。
【図3】測定側特徴量の連続的な変化の具体例1を説明する図である。
【図4】応答側特徴量記憶部に格納されている参照テーブルの具体例1に係る特徴量の変化を示す説明図である。
【図5】測定側特徴量記憶部に格納されている参照テーブルの具体例1に係る特徴量の変化を示す説明図である。
【図6】(a)は、測定側機器と応答側機器との間の距離を算出する測定側機器の処理動作を示すフローチャート、(b)は、測定側機器と応答側機器との間の距離を算出する応答側機器の処理動作を示すフローチャートである。
【図7】応答側特徴量の連続的な変化の具体例1を説明する図である。
【図8】測定側特徴量の連続的な変化の具体例2を説明する図である。
【図9】応答側特徴量記憶部に格納されている参照テーブルの具体例2に係る特徴量の変化を示す説明図である。
【図10】測定側特徴量記憶部に格納されている参照テーブルの具体例2に係る特徴量の変化を示す説明図である。
【図11】応答側特徴量の連続的な変化の具体例2を説明する図である。
【図12】測定側特徴量の連続的な変化の具体例3を説明する図である。
【図13】応答側特徴量記憶部に格納されている参照テーブルの具体例3に係る構成例を示す説明図である。
【図14】測定側特徴量記憶部に格納されている参照テーブルの具体例3に係る構成例を示す説明図である。
【図15】応答側特徴量の連続的な変化の具体例3を説明する図である。
【図16A】実施形態2に係る測定側機器の電気的構成を示す機能ブロック図である。
【図16B】実施形態2に係る応答側機器の電気的構成を示す機能ブロック図である。
【図17】実施形態3に係る距離検出システムの全体構成図である。
【図18A】実施形態3を例えば具体例1に適用した場合の、各応答側特徴量記憶部に記憶されている参照テーブルの構成例を示す説明図である。
【図18B】実施形態3を例えば具体例1に適用した場合の、各応答側特徴量記憶部に記憶されている参照テーブルの構成例を示す説明図である。
【図18C】実施形態3を例えば具体例1に適用した場合の、各応答側特徴量記憶部に記憶されている参照テーブルの構成例を示す説明図である。
【図19A】実施形態4に係る測定側機器の電気的構成を示す機能ブロック図である。
【図19B】実施形態4に係る応答側機器の電気的構成を示す機能ブロック図である。
【図20A】実施形態4を例えば具体例1に適用した場合の、各応答側特徴量記憶部に記憶されている参照テーブルの構成例を示す説明図である。
【図20B】実施形態4を例えば具体例1に適用した場合の、各応答側特徴量記憶部に記憶されている参照テーブルの構成例を示す説明図である。
【図20C】実施形態4を例えば具体例1に適用した場合の、各応答側特徴量記憶部に記憶されている参照テーブルの構成例を示す説明図である。
【発明を実施するための形態】
【0022】
以下、本発明の実施の形態について、図面を参照して説明する。
【0023】
−実施形態1−
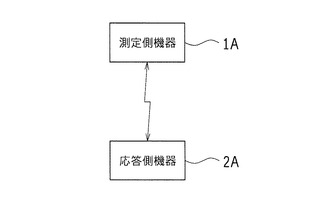
図1は、本発明の実施形態1に係る距離検出システムの全体構成図である。
【0024】
実施形態1に係る距離検出システムは、距離を測定する測定側機器1Aと、測定側機器1Aの発呼に対して応答する応答側機器2Aとを備え、測定側機器1Aと応答側機器2Aとの間で信号の送受信を行うことにより、測定側機器1Aの発呼に対する応答側機器2Aの応答結果に基づいて、測定側機器1Aが応答側機器2Aとの間の距離を検出(算出)する構成となっている。
【0025】
ここで、測定側機器1Aとしては、例えばテレビジョン受像機を想定することができ、応答側機器2Aとしては、例えばリモートコントローラ(リモコン)を想定することができる。ただし、このようなテレビジョン受像機やリモコンに限定されるものではなく、例えば空気調和機とそのリモコン、オーディオ機器とそのリモコン、さらには画像形成装置とそのリモコン(着脱可能な操作パネル装置)といった具合に、種々の電子機器とそのリモコンとに適用することができる。また、応答側機器2Aもリモコン以外の電子機器であってもよい。例えば、テレビジョン受像機とオーディオ機器といった電子機器同士の距離検出であってもよい。
【0026】
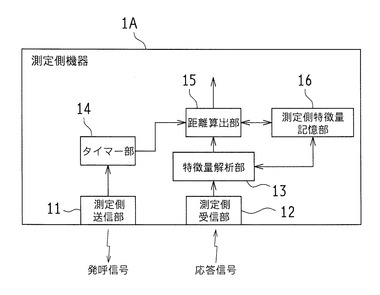
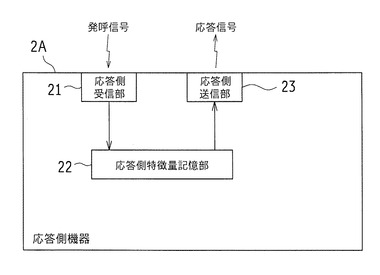
図2Aは、測定側機器1Aの電気的構成を示す機能ブロック図、図2Bは、応答側機器2Aの電気的構成を示す機能ブロック図である。
【0027】
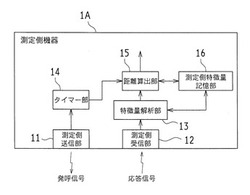
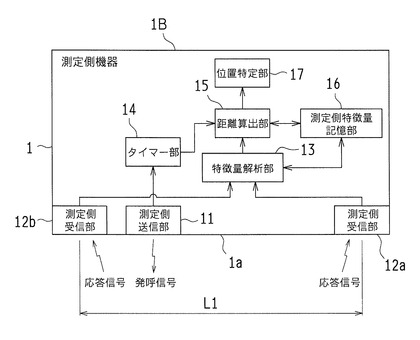
測定側機器1Aは、測定側特徴量が連続的に変化する発呼信号を送信する測定側送信部11と、応答側機器2Aから送信されてくる応答信号を受信する測定側受信部12と、受信した応答信号の応答側特徴量を解析する特徴量解析部13と、発呼信号を送信したタイミングから一定時間を計測するタイマー部14と、応答側機器2Aから受信した応答信号の応答側特徴量の解析結果に基づいて、一定時間経過後に測定側機器1Aと応答側機器2Aとの間の距離を算出する距離算出部15と、後述する応答側特徴量記憶部22に記憶されている応答側特徴量を記憶する測定側特徴量記憶部16と、を備えている。
【0028】
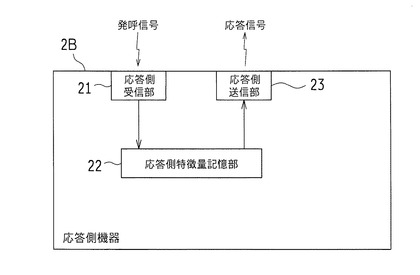
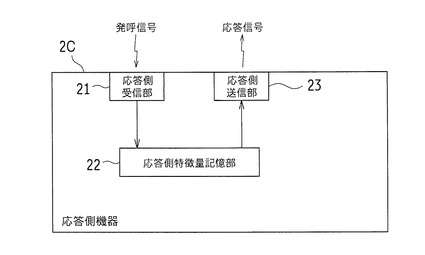
応答側機器2Aは、測定側機器1Aから送信されてくる測定側特徴量が連続的に変化する発呼信号を受信する応答側受信部21と、応答側受信部21が受信した発呼信号の測定側特徴量に対応して連続的に変化する応答側特徴量を記憶する応答側特徴量記憶部22と、応答側受信部21が発呼信号を受信することにより、応答側特徴量記憶部22に記憶された応答側特徴量に基づいて特徴量が連続的に変化する応答信号を送信する応答側送信部23と、を備えている。また、発呼信号及び応答信号は電磁波または音波である。
【0029】
以下、実施形態1に係る距離検出システムにおける距離検出処理の具体例について説明する。
【0030】
(具体例1)
具体例1では、測定側特徴量及び応答側特徴量の連続的な変化を周波数の変化としている。
【0031】
ここで、測定側特徴量及び応答側特徴量の連続的な変化について具体的に説明する。
【0032】
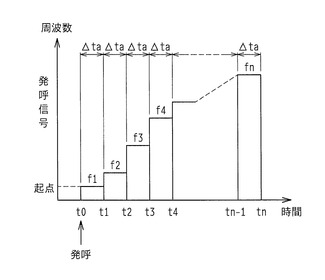
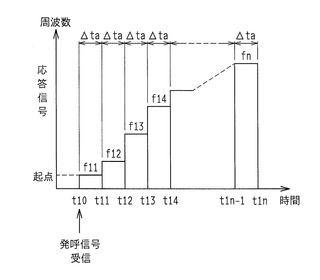
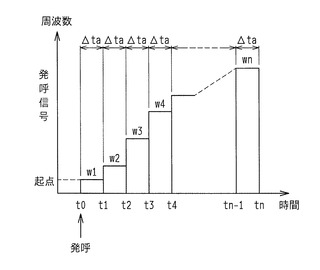
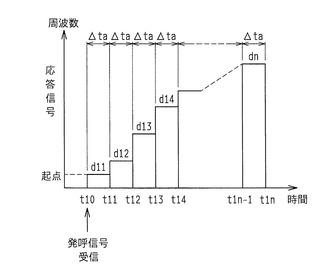
測定側機器1Aの測定側送信部11から送信される測定側特徴量が連続的に変化する発呼信号とは、例えば図3に示すように、起点となる周波数f1からf2,f3,f4,・・・,fnと、予め設定された特定時間(Δta)ごとに周波数が連続的に(この例では段階的に)高くなっていく信号としている。若しくは、これとは逆に、起点となる周波数fnから,・・・,f3,f2,f1と、予め設定された特定時間(Δta)ごとに周波数が連続的に(この例では段階的に)低くなっていく信号としてもよい。すなわち、発呼信号は、時刻t0に発呼されると、その時点からΔta後の時刻t1までは周波数f1の信号を送信し、時刻t1からΔta後の時刻t2までは周波数f2の信号を送信し、時刻t2からΔta後の時刻t3までは周波数f3の信号を送信し、時刻t3からΔta後の時刻t4までは周波数f4の信号を送信し、・・・、時刻tn−1からΔta後の時刻tnまでは周波数fnの信号を送信するようになっている。つまり、Δtaごとにf1,f2,f3,f4,・・・,fnと、周波数が連続的に変化する発呼信号を送信するようになっている。
【0033】
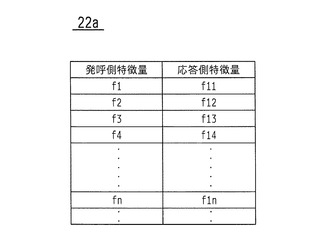
一方、応答側機器2Aの応答側特徴量記憶部22には、図4に示すように、測定側特徴量が連続的に変化する発呼信号に対応して連続的に変化させる応答側特徴量を記憶した参照テーブル22aが格納されている。この参照テーブル22aでは、発呼側特徴量f1に対して応答側特徴量f11が対応付けられており、発呼側特徴量f2に対して応答側特徴量f12が対応付けられており、発呼側特徴量f3に対して応答側特徴量f13が対応付けられており、発呼側特徴量f4に対して応答側特徴量f14が対応付けられており、・・・、発呼側特徴量fnに対して応答側特徴量f1nが対応付けられている。
【0034】
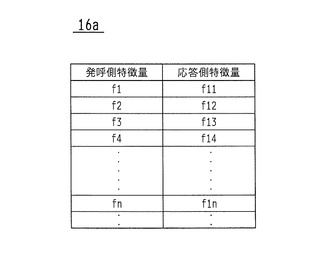
また、測定側機器1Aの測定側特徴量記憶部16にも、図5に示すように、図4に示した参照テーブル22aと同様の参照テーブル16aが記憶されている。
【0035】
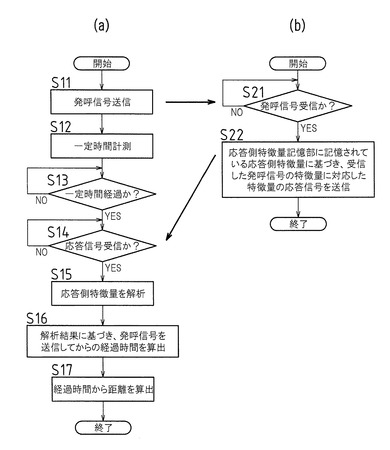
次に、上記構成の測定側機器1Aと応答側機器2Aとにおいて、測定側機器1Aと応答側機器2Aとの間の距離を算出する処理動作について、図6(a),(b)に示すフローチャートを参照して説明する。ただし、図6(a)は測定側機器1Aの処理動作を示すフローチャート、図6(b)は応答側機器2Aの処理動作を示すフローチャートである。
【0036】
まず、測定側機器1Aの測定側送信部11から図3に示すパターンで測定側特徴量が連続的に変化する発呼信号を送信し(ステップS11)、この送信と同時に、タイマー部14を起動して一定時間T1の計測を開始する(ステップS12)。この後、応答側機器2Aからの応答信号の受信の有無を監視する(ステップS13)。
【0037】
応答側機器2Aは、測定側機器1Aからの発呼信号の有無を常に監視している(ステップS21)。そして、発呼信号を応答側受信部21で受信すると(ステップS21でYesと判断されると)、応答側特徴量記憶部22に記憶されている図4に示す参照テーブル22aを参照して、受信した発呼信号の発呼側特徴量に対応する応答側特徴量の応答信号を応答側送信部23から送信する(ステップS22)。
【0038】
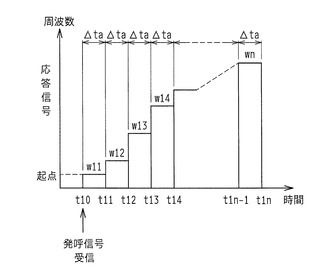
ステップS22の処理を具体的に説明すると、発呼側特徴量がf1である周波数の発呼信号を受信している間は、応答側特徴量がf11である周波数の応答信号を送信し、発呼側特徴量がf2である周波数の発呼信号を受信している間は、応答側特徴量がf12である周波数の応答信号を送信し、発呼側特徴量がf3である周波数の発呼信号を受信している間は、応答側特徴量がf13である周波数の応答信号を送信し、発呼側特徴量がf4である周波数の発呼信号を受信している間は、応答側特徴量がf14である周波数の応答信号を送信し、・・・、発呼側特徴量がfnである周波数の発呼信号を受信している間は、応答側特徴量がf1nである周波数の応答信号を送信する。すなわち、応答側機器2Aから送信される応答信号は、図7に示すように、発呼信号を受信した時点t10からΔta後の時刻t11までは周波数f11の信号を送信し、時刻t11からΔta後の時刻t12までは周波数f12の信号を送信し、時刻t12からΔta後の時刻t13までは周波数f13の信号を送信し、時刻t13からΔta後の時刻t14までは周波数f14の信号を送信し、・・・、時刻t1n−1からΔta後の時刻t1nまでは周波数f1nの信号を送信するようになっている。つまり、Δtaごとにf11,f12,f13,f14,・・・,f1nと、周波数が連続的に変化する応答信号を送信するようになっている。
【0039】
一方、測定側機器1Aは、タイマー部14によって一定時間T1の計測を終了すると(ステップS13でYesと判断されると)、その時点で測定側受信部12によって応答信号を受信しているか否かを判断する(ステップS14)。その結果、応答信号を受信している場合(ステップS14でYesと判断された場合)には、特徴量解析部13によって受信している応答信号の応答側特徴量を解析する(ステップS15)。
【0040】
ステップS15の処理を具体的に説明すると、一定時間T1が経過した時点から複数周期分の間の時間Δtaa(≦Δta)だけ応答信号をサンプリングして、応答信号の周波数(応答側特徴量)を計測する。その結果、現在受信している応答信号の応答側特徴量が例えば周波数f14であった場合、特徴量解析部13は、測定側特徴量記憶部16に記憶されている参照テーブル16a(図5)を参照して、応答信号の応答側特徴量が周波数f14であることを確認し、その確認信号を解析結果として距離算出部15に出力する。
【0041】
距離算出部15は、受け取った解析結果の確認信号に基づき、発呼信号を送信してからの経過時間を算出する(ステップS16)。
【0042】
ステップS16の処理を具体的に説明すると、距離算出部15は、確認信号に基づき、測定側特徴量記憶部16に記憶されている参照テーブル16aを参照して、周波数f14が、自機が送信した周波数f4に対応する周波数であることを確認する。つまり、一定時間T1を経過した時点で周波数f14の応答信号を受信していることを確認する。ここで、周波数f4の発呼信号は、図3に示すように、最初に発呼信号を送信した時刻t0から(Δta×3)だけ送れた時刻t3に送信されているので、周波数f4の発呼信号を送信してから、一定時間T1後にこれに対応する周波数f14の応答信号を受信するまでの時間txは、発呼信号を受信してから応答信号を送信するまでに応答側機器2A側で処理に要する時間をΔrとすると、式(1)
tx=(T1−Δta×3−Δr)÷2 ・・・(1)
によって求めることができる。
【0043】
従って、距離算出部15は、この求めた時間txに応答信号の速度Vを掛け合わせることによって、測定側機器1Aから応答側機器2Aまでの距離Lxを算出する。
【0044】
ここで、発呼信号及び応答信号が音波(V=340m/sec)の場合について、具体的に数値を当てはめて説明すると、T1が例えば20msec、Δtaが1msec、Δrが0.1msecであるとすると、tx=(20−1×3−1)÷2=8(msec)となる。従って、この場合の測定側機器1Aから応答側機器2Aまでの距離Lxは、340×0.008=2.72(m)となる。
【0045】
上記したように、具体例1によれば、発呼信号を送信してから一定時間T1が経過した時点でどの周波数レベルの応答信号を受信したのかを確認することで、測定側機器1Aから応答側機器2Aまでの距離を正確に算出することができる。
【0046】
(具体例2)
具体例2では、測定側特徴量及び応答側特徴量の連続的な変化を振幅の変化としている。
【0047】
なお、具体例2の測定側機器及び応答側機器の機能ブロックの構成は、図2A及び図2Bに示した測定側機器1A及び応答側機器2Aの機能ブロックの構成と同じであるので、ここでは図2A及び図2Bで用いた符号を用いて各ブロックの説明を行うものとする。
【0048】
測定側機器1Aの測定側送信部11から送信される測定側特徴量が連続的に変化する発呼信号とは、例えば図8に示すように、起点となる振幅w1からw2,w3,w4,・・・,wnと、予め設定された特定時間(Δta)ごとに振幅が連続的に(この例では段階的に)大きくなっていく信号としている。若しくは、これとは逆に、起点となる振幅wnから,・・・,w3,w2,w1と、予め設定された特定時間(Δta)ごとに振幅が連続的に(この例では段階的に)小さくなっていく信号としてもよい。すなわち、発呼信号は、時刻t0に発呼されると、その時点からΔta後の時刻t1までは周波数一定で振幅がw1の信号を送信し、時刻t1からΔta後の時刻t2までは周波数一定で振幅がw2の信号を送信し、時刻t2からΔta後の時刻t3までは周波数が一定で振幅がw3の信号を送信し、時刻t3からΔta後の時刻t4までは周波数が一定で振幅がw4の信号を送信し、・・・、時刻tn−1からΔta後の時刻tnまでは周波数が一定で振幅がwnの信号を送信するようになっている。つまり、Δtaごとにw1,w2,w3,w4,・・・,wnと振幅が連続的に変化する発呼信号を送信するようになっている。
【0049】
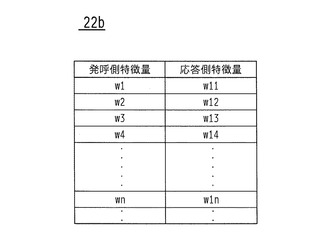
一方、応答側機器2Aの応答側特徴量記憶部22には、図9に示すように、測定側特徴量が連続的に変化する発呼信号に対応して連続的に変化させる応答側特徴量を記憶した参照テーブル22bが格納されている。この参照テーブル22bでは、発呼側特徴量w1に対して応答側特徴量w11が対応付けられており、発呼側特徴量w2に対して応答側特徴量w12が対応付けられており、発呼側特徴量w3に対して応答側特徴量w13が対応付けられており、発呼側特徴量w4に対して応答側特徴量w14が対応付けられており、・・・、発呼側特徴量wnに対して応答側特徴量w1nが対応付けられている。
【0050】
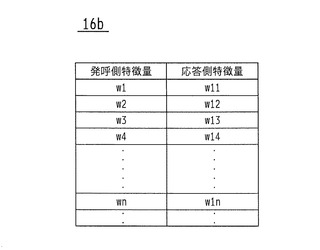
また、測定側機器1Aの測定側特徴量記憶部16にも、図10に示すように、図9に示した参照テーブル22bと同様の参照テーブル16bが記憶されている。
【0051】
次に、上記構成の測定側機器1Aと応答側機器2Aとにおいて、測定側機器1Aと応答側機器2Aとの間の距離を算出する処理動作について、具体例1でも用いた図6(a),(b)に示すフローチャートを参照して説明する。
【0052】
まず、測定側機器1Aの測定側送信部11から図8に示すパターンで測定側特徴量が連続的に変化する発呼信号を送信し(ステップS11)、この送信と同時に、タイマー部14を起動して一定時間T1の計測を開始する(ステップS12)。この後、応答側機器2Aからの応答信号の受信の有無を監視する(ステップS13)。
【0053】
応答側機器2Aは、測定側機器1Aからの発呼信号の有無を常に監視している(ステップS21)。そして、発呼信号を応答側受信部21で受信すると(ステップS21でYesと判断されると)、応答側特徴量記憶部22に記憶されている図9に示す参照テーブル22bを参照して、受信した発呼信号の発呼側特徴量に対応する応答側特徴量の応答信号を応答側送信部23から送信する(ステップS22)。
【0054】
ステップS22の処理を具体的に説明すると、発呼側特徴量がw1である振幅の発呼信号を受信している間は、応答側特徴量がw11である振幅の応答信号を送信し、発呼側特徴量がw2である振幅の発呼信号を受信している間は、応答側特徴量がw12である振幅の応答信号を送信し、発呼側特徴量がw3である振幅の発呼信号を受信している間は、応答側特徴量がw13である振幅の応答信号を送信し、発呼側特徴量がw4である振幅の発呼信号を受信している間は、応答側特徴量がw14である振幅の応答信号を送信し、・・・、発呼側特徴量がwnである振幅の発呼信号を受信している間は、応答側特徴量がw1nである振幅の応答信号を送信する。すなわち、応答側機器2Aから送信される応答信号は、図11に示すように、発呼信号を受信した時点t10からΔta後の時刻t11までは周波数一定で振幅w11の信号を送信し、時刻t11からΔta後の時刻t12までは周波数一定で振幅w12の信号を送信し、時刻t12からΔta後の時刻t13までは周波数一定で振幅w13の信号を送信し、時刻t13からΔta後の時刻t14までは周波数一定で振幅w14の信号を送信し、・・・、時刻t1n−1からΔta後の時刻t1nまでは周波数一定で振幅w1nの信号を送信するようになっている。つまり、Δtaごとにw11,w12,w13,w14,・・・,w1nと、振幅が連続的に変化する応答信号を送信するようになっている。
【0055】
一方、測定側機器1Aは、タイマー部14によって一定時間T1の計測を終了すると(ステップS13でYesと判断されると)、その時点で測定側受信部12によって応答信号を受信しているか否かを判断する(ステップS14)。その結果、応答信号を受信している場合(ステップS14でYesと判断された場合)には、特徴量解析部13によって受信している応答信号の応答側特徴量を解析する(ステップS15)。
【0056】
ステップS15の処理を具体的に説明すると、一定時間T1が経過した時点から1周期分の時間Δtaa(≦Δta)だけ応答信号をサンプリングして、応答信号の振幅(応答側特徴量)を計測する。その結果、現在受信している応答信号の応答側特徴量が例えば振幅w14であった場合、特徴量解析部13は、測定側特徴量記憶部16に記憶されている参照テーブル16b(図10)を参照して、応答信号の応答側特徴量が振幅w14であることを確認し、その確認信号を解析結果として距離算出部15に出力する。
【0057】
距離算出部15は、受け取った解析結果の確認信号に基づき、発呼信号を送信してからの経過時間を算出する(ステップS16)。
【0058】
ステップS16の処理を具体的に説明すると、距離算出部15は、確認信号に基づき、測定側特徴量記憶部16に記憶されている参照テーブル16bを参照して、振幅w14が、自機が送信した振幅wf4に対応する振幅であることを確認する。つまり、一定時間T1を経過した時点で振幅w14の応答信号を受信していることを確認する。ここで、振幅w4の発呼信号は、図8に示すように、最初に発呼信号を送信した時刻t0から(Δta×3)だけ送れた時刻t3に送信されているので、振幅w4の発呼信号を送信してから、一定時間T1後にこれに対応する振幅w14の応答信号を受信するまでの時間txは、発呼信号を受信してから応答信号を送信するまでに応答側機器2A側で処理に要する時間をΔrとすると、式(2)
tx=(T1−Δta×3−Δr)÷2 ・・・(2)
によって求めることができる。
【0059】
従って、距離算出部15は、この求めた時間txに応答信号の速度Vを掛け合わせることによって、測定側機器1Aから応答側機器2Aまでの距離を算出する。
【0060】
上記したように、具体例2によれば、発呼信号を送信してから一定時間T1が経過した時点でどの振幅レベルの応答信号を受信したのかを確認することで、測定側機器1Aから応答側機器2Aまでの距離を正確に算出することができる。
【0061】
(具体例3)
具体例3では、測定側特徴量及び応答側特徴量の連続的な変化を振幅の中心からの変化量としている。
【0062】
なお、具体例3の測定側機器及び応答側機器の機能ブロックの構成は、図2A及び図2Bに示した測定側機器1A及び応答側機器2Aの機能ブロックの構成と同じであるので、ここでは図2A及び図2Bで用いた符号を用いて各ブロックの説明を行うものとする。
【0063】
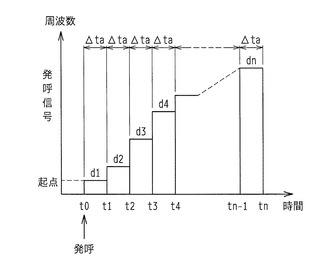
測定側機器1Aの測定側送信部11から送信される測定側特徴量が連続的に変化する発呼信号とは、例えば図12に示すように、起点となる振幅の中心からの変化量d1からd2,d3,d4,・・・,dnと、予め設定された特定時間(Δta)ごとに振幅の中心からの変化量(中心からの距離)が連続的に(この例では段階的に)大きくなっていく信号としている。若しくは、これとは逆に、起点となる振幅の中心からの変化量dnから,・・・,d3,d2,d1と、予め設定された特定時間(Δta)ごとに振幅の中心からの変化量が連続的に(この例では段階的に)小さくなっていく信号としてもよい。すなわち、発呼信号は、時刻t0に発呼されると、その時点からΔta後の時刻t1までは周波数一定で振幅の中心からの変化量がd1の信号を送信し、時刻t1からΔta後の時刻t2までは周波数一定で振幅の中心からの変化量がd2の信号を送信し、時刻t2からΔta後の時刻t3までは周波数が一定で振幅の中心からの変化量がd3の信号を送信し、時刻t3からΔta後の時刻t4までは周波数が一定で振幅の中心からの変化量がd4の信号を送信し、・・・、時刻tn−1からΔta後の時刻tnまでは周波数が一定で振幅の中心からの変化量がdnの信号を送信するようになっている。つまり、Δtaごとにd1,d2,d3,d4,・・・,dnと振幅の中心からの変化量が連続的に変化する発呼信号を送信するようになっている。
【0064】
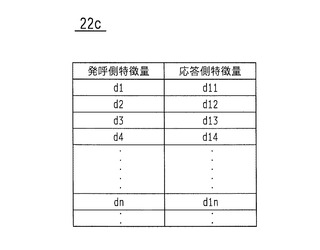
一方、応答側機器2Aの応答側特徴量記憶部22には、図13に示すように、測定側特徴量が連続的に変化する発呼信号に対応して連続的に変化させる応答側特徴量を記憶した参照テーブル22cが格納されている。この参照テーブル22cでは、発呼側特徴量d1に対して応答側特徴量d11が対応付けられており、発呼側特徴量d2に対して応答側特徴量d12が対応付けられており、発呼側特徴量d3に対して応答側特徴量d13が対応付けられており、発呼側特徴量d4に対して応答側特徴量d14が対応付けられており、・・・、発呼側特徴量dnに対して応答側特徴量d1nが対応付けられている。
【0065】
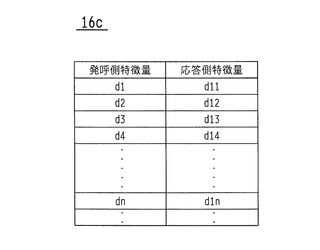
また、測定側機器1Aの測定側特徴量記憶部16にも、図14に示すように、図13に示した参照テーブル22cと同様の参照テーブル16cが記憶されている。
【0066】
次に、上記構成の測定側機器1Aと応答側機器2Aとにおいて、測定側機器1Aと応答側機器2Aとの間の距離を算出する処理動作について、具体例1,2でも用いた図6(a),(b)に示すフローチャートを参照して説明する。
【0067】
まず、測定側機器1Aの測定側送信部11から図12に示すパターンで測定側特徴量が連続的に変化する発呼信号を送信し(ステップS11)、この送信と同時に、タイマー部14を起動して一定時間T1の計測を開始する(ステップS12)。この後、応答側機器2Aからの応答信号の受信の有無を監視する(ステップS13)。
【0068】
応答側機器2Aは、測定側機器1Aからの発呼信号の有無を常に監視している(ステップS21)。そして、発呼信号を応答側受信部21で受信すると(ステップS21でYesと判断されると)、応答側特徴量記憶部22に記憶されている図13に示す参照テーブル22cを参照して、受信した発呼信号の発呼側特徴量に対応する応答側特徴量の応答信号を応答側送信部23から送信する(ステップS22)。
【0069】
ステップS22の処理を具体的に説明すると、発呼側特徴量がd1である発呼信号を受信している間は、応答側特徴量がd11である応答信号を送信し、発呼側特徴量がd2である発呼信号を受信している間は、応答側特徴量がd12である応答信号を送信し、発呼側特徴量がd3である周波数の発呼信号を受信している間は、応答側特徴量がd13である応答信号を送信し、発呼側特徴量がd4である発呼信号を受信している間は、応答側特徴量がd14である応答信号を送信し、・・・、発呼側特徴量がdnである発呼信号を受信している間は、応答側特徴量がd1nである応答信号を送信する。すなわち、応答側機器2Aから送信される応答信号は、図15に示すように、発呼信号を受信した時点t10からΔta後の時刻t11までは周波数一定で振幅の中心からの変化量がd11の信号を送信し、時刻t11からΔta後の時刻t12までは周波数一定で振幅の中心からの変化量がd12の信号を送信し、時刻t12からΔta後の時刻t13までは周波数一定で振幅の中心からの変化量がd13の信号を送信し、時刻t13からΔta後の時刻t14までは周波数一定で振幅の中心からの変化量がd14の信号を送信し、・・・、時刻t1n−1からΔta後の時刻t1nまでは周波数一定で振幅の中心からの変化量がd1nの信号を送信するようになっている。つまり、Δtaごとにd11,d12,d13,d14,・・・,d1nと、振幅の中心からの変化量が連続的に変化する応答信号を送信するようになっている。
【0070】
一方、測定側機器1Aは、タイマー部14によって一定時間T1の計測を終了すると(ステップS13でYesと判断されると)、その時点で測定側受信部12によって応答信号を受信しているか否かを判断する(ステップS14)。その結果、応答信号を受信している場合(ステップS14でYesと判断された場合)には、特徴量解析部13によって受信している応答信号の応答側特徴量を解析する(ステップS15)。
【0071】
ステップS15の処理を具体的に説明すると、一定時間T1が経過した時点から1周期分の時間Δtaa(≦Δta)だけ応答信号をサンプリングして、応答信号の振幅の中心からの変化量(応答側特徴量)を計測する。その結果、現在受信している応答信号の応答側特徴量が例えばd14であった場合、特徴量解析部13は、測定側特徴量記憶部16に記憶されている参照テーブル16c(図14)を参照して、応答信号の応答側特徴量がd14であることを確認し、その確認信号を解析結果として距離算出部15に出力する。
【0072】
距離算出部15は、受け取った解析結果の確認信号に基づき、発呼信号を送信してからの経過時間を算出する(ステップS16)。
【0073】
ステップS16の処理を具体的に説明すると、距離算出部15は、確認信号に基づき、測定側特徴量記憶部16に記憶されている参照テーブル16cを参照して、振幅の中心からの変化量d14が、自機が送信した振幅の中心からの変化量wf4に対応する信号であることを確認する。つまり、一定時間T1を経過した時点で振幅の中心からの変化量がd14の応答信号を受信していることを確認する。ここで、振幅の中心からの変化量がd4の発呼信号は、図12に示すように、最初に発呼信号を送信した時刻t0から(Δta×3)だけ送れた時刻t3に送信されているので、振幅の中心からの変化量がd4の発呼信号を送信してから、一定時間T1後にこれに対応する振幅の中心からの変化量がd14の応答信号を受信するまでの時間txは、発呼信号を受信してから応答信号を送信するまでに応答側機器2A側で処理に要する時間をΔrとすると、式(3)
tx=(T1−Δta×3−Δr)÷2 ・・・(3)
によって求めることができる。
【0074】
従って、距離算出部15は、この求めた時間txに応答信号の速度Vを掛け合わせることによって、測定側機器1Aから応答側機器2Aまでの距離を算出する。
【0075】
上記したように、具体例3によれば、発呼信号を送信してから一定時間T1が経過した時点でどの変化量レベルの応答信号を受信したのかを確認することで、測定側機器1Aから応答側機器2Aまでの距離を正確に算出することができる。
【0076】
なお、上記具体例1〜3では、発呼信号の特徴量と応答信号の特徴量とを、同じ特徴量としている。すなわち、発呼信号の特徴量が周波数であれば応答信号の特徴量も周波数とし、発呼信号の特徴量が振幅であれば応答信号の特徴量も振幅とし、発呼信号の特徴量が振幅の中心からの変化量であれば応答信号の特徴量も振幅の中心からの変化量としている。しかし、発呼信号と応答信号とは、異なる機器から送信される異なる信号であるので、必ずしも発呼信号の特徴量と応答信号の特徴量とを同じ特徴量とする必要はない。例えば、発呼信号の特徴量を周波数とし、応答信号の特徴量を振幅または振幅の中心からの変化量としてもよく、また、発呼信号の特徴量を振幅とし、応答信号の特徴量を周波数または振幅の中心からの変化量としてもよく、また、発呼信号の特徴量を振幅の中心からの変化量とし、応答信号の特徴量を周波数または振幅としてもよい。これらの場合、応答側特徴量記憶部22及び測定側特徴量記憶部16に記憶する参照テーブルをこれらの組み合わせに対応するように作成しておけばよい。
【0077】
また、上記具体例1〜3では、一定時間T1経過後に応答側機器から受信した応答信号の応答特徴量に基づいて、応答側機器までの距離を算出する構成としているが、このとき、測定側機器1Aは、発呼信号を送信したタイミングから一定時間T1より短い所定時間T2(<T1)の間は応答信号を受信していてもそのサンプリングを行わない、または、応答信号をサンプリングしたとしてもその計測結果をマスクする構成としてもよい。発呼信号を送信したタイミングから所定時間T2の間、サンプリングを行わない、または、計測結果をマスクすることによって、発呼信号の反射や他のノイズ信号の影響等による誤検知を防止することができる。
【0078】
−実施形態2−
実施形態1に係る距離検出システムは、測定側機器1Aから応答側機器2Aまでの距離を算出する構成としているが、実施形態2に係る距離検出システムは、測定側機器1Bから応答側機器2Bまでの距離の算出に加え、その距離から応答側機器1Bの位置を特定する構成としている。
【0079】
図16Aは、実施形態2に係る測定側機器1Bの電気的構成を示す機能ブロック図、図16Bは、実施形態2に係る応答側機器2Bの電気的構成を示す機能ブロック図である。
【0080】
測定側機器1Bは、測定側特徴量が連続的に変化する発呼信号を送信する測定側送信部11と、応答側機器2Bから送信されてくる応答信号を受信する複数個(この例では2個)の測定側受信部12a,12bと、受信した応答信号の応答側特徴量を解析する特徴量解析部13と、発呼信号を送信したタイミングから一定時間を計測するタイマー部14と、応答側機器2Bから受信した応答信号の応答側特徴量の解析結果に基づいて、一定時間経過後に測定側機器1Bと応答側機器2Bとの間の距離を算出する距離算出部15と、距離算出部15の算出結果に基づいて応答側機器2の位置を特定する位置特定部17と、後述する応答側特徴量記憶部22に記憶されている応答側特徴量を記憶する測定側特徴量記憶部16と、を備えている。測定側受信部12a,12bは、装置筐体1の正面1a側において、同じ高さ位置の左右両側に一定の距離L1をあけて配置されている。
【0081】
応答側機器2Bは、測定側機器1Bから送信されてくる測定側特徴量が連続的に変化する発呼信号を受信する応答側受信部21と、応答側受信部21が受信した発呼信号の測定側特徴量に対応して連続的に変化する応答側特徴量を記憶する応答側特徴量記憶部22と、応答側受信部21が発呼信号を受信することにより、応答側特徴量記憶部22に記憶された応答側特徴量に基づいて特徴量が連続的に変化する応答信号を送信する応答側送信部23と、を備えている。また、発呼信号及び応答信号は電磁波または音波である。
【0082】
以下、実施形態2に係る距離検出システムにおける距離及び位置検出処理の具体例について説明する。
【0083】
なお、距離の検出処理については、実施形態2に係る距離検出システムにおいても上記具体例1〜3のいずれかの処理を行うことによって検出できるので、ここでは距離検出についての説明を省略する。ただし、実施形態2に係る距離検出システムでは、測定側機器1Bに2個の測定側受信部12a,12bが設けられているので、応答側機器2Bからの応答信号は、2個の測定側受信部12a,12bのそれぞれで受信される。従って、特徴量解析部13では、受信したそれぞれの応答信号について解析を行うことになり、距離算出部15では、それぞれの解析結果に基づいてそれぞれの距離(2種類の距離)を算出することになる。
【0084】
ここで、測定側機器1Bの測定側受信部12aから応答側機器2Bまでの距離をLx1、測定側機器1Bの測定側受信部12bから応答側機器2Bまでの距離をLx2とすると、測定側順部12a,12b間の距離L1と、距離Lx1,Lx2とによって三角形を作図できるので、距離L1を底辺とする三角形の頂点の位置を求めることによって、応答側機器2Bの横方向(二次元方向)の位置を特定することができる。
【0085】
また、図示は省略しているが測定側受信部1cをさらに1個追加し、筐体1の正面1a側において、これら3個の測定側受信部1a,1b,1cで三角形を形成するように配置すれば、応答側機器2Bの三次元方向の位置を特定することができる。
【0086】
−実施形態3−
図17は、実施形態3に係る距離検出システムの全体構成図である。
【0087】
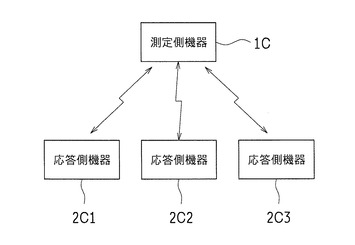
実施形態3に係る距離検出システムは、距離を測定する測定側機器1Cと、測定側機器1Cの発呼に対して応答する複数個(この例では3個)の応答側機器2C1,2C2,2C3とを備え、測定側機器1Cと各応答側機器2C1,2C2,2C3との間で信号の送受信を行うことにより、測定側機器1Cの発呼に対する各応答側機器2C1,2C2,2C3の応答結果に基づいて、測定側機器1Cが各応答側機器2C1,2C2,2C3との間の距離をそれぞれ検出(算出)する構成となっている。
【0088】
この場合、各応答側機器1C1,2C2,2C3の応答側特徴量記憶部22に記憶されている応答側特徴量を、応答側機器2C1,2C2,2C3ごとに異なる設定としている。実施形態3を例えば具体例1に適用すると、応答側特徴量記憶部22に記憶されている参照テーブル22aを、図18A〜図18Cに示すように設定する。図18Aに示す参照テーブル22a1は、応答側機器2C1の応答側特徴量記憶部22に記憶されている参照テーブルの一例を示しており、図18Bに示す参照テーブル22a2は、応答側機器2C2の応答側特徴量記憶部22に記憶されている参照テーブルの一例を示しており、図18Cに示す参照テーブル22a3は、応答側機器2C3の応答側特徴量記憶部22に記憶されている参照テーブルの一例を示している。ここで、参照テーブル22a1の応答側特徴量のf11〜f1nを例えば低周波数帯域に設定し、参照テーブル22a2の応答側特徴量のf21〜f2nを例えば中周波数帯域に設定し、参照テーブル22a3の応答側特徴量のf31〜f3nを例えば高周波数帯域に設定している。
【0089】
このように、各応答側機器1C1,2C2,2C3から送信される応答信号の周波数帯域を、各応答側機器1C1,2C2,2C3ごとに重複しないように異ならせることで、測定側機器1Cでは、受信する応答信号を図示しないバンドパスフィルタによりフィルタリング処理することで、各応答側機器1C1,2C2,2C3から送信される応答信号を区別して受信することができる。
【0090】
なお、各応答信号を区別して受信した以降の処理は、上記具体例1〜3と同様にして距離の算出を行えばよいので、ここでは各応答側機器1C1,2C2,2C3までの距離の算出(実施形態1)及び位置の特定(実施形態2)についての説明を省略する。
【0091】
また、上記説明では実施形態3を具体例1に適用した場合について説明しているが、他の具体例2,3に適用した場合においても同様であり、振幅の変化量の範囲を重複しないように異なる設定範囲とする、また、振幅の中心からの変化量の変化範囲を重複しないように異なる設定範囲とすることで、各応答側機器1C1,2C2,2C3から送信される応答信号を区別して受信することが可能である。
【0092】
−実施形態4−
実施形態4は、実施形態3の変形例であり、距離検出システムの全体構成は、図17と同じである。
【0093】
図19Aは、実施形態4に係る測定側機器1Cの電気的構成を示す機能ブロック図、図19Bは、実施形態4に係る応答側機器2Cの電気的構成を示す機能ブロック図である。
【0094】
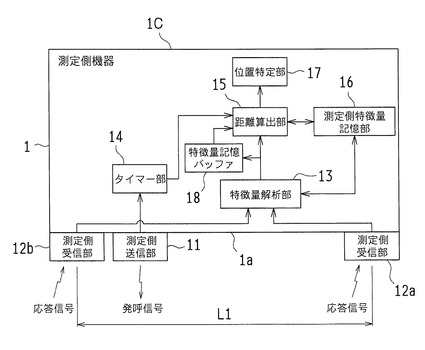
測定側機器1Cは、測定側特徴量が連続的に変化する発呼信号を送信する測定側送信部11と、応答側機器2Cから送信されてくる応答信号を受信する複数個(この例では2個)の測定側受信部12a,12bと、受信した応答信号の応答側特徴量を解析する特徴量解析部13と、発呼信号を送信したタイミングから一定時間を計測するタイマー部14と、応答側機器2Cから受信した応答信号の応答側特徴量の解析結果に基づいて、一定時間経過後に測定側機器1Cと応答側機器2Cとの間の距離を算出する距離算出部15と、距離算出部15の算出結果に基づいて応答側機器2の位置を特定する位置特定部17と、一定時間T1の前後にサンプリングした応答側特徴量を記憶する特徴量記憶バッファ18と、後述する応答側特徴量記憶部22に記憶されている応答側特徴量を記憶する測定側特徴量記憶部16と、を備えており、距離算出部15は、特徴量記憶バッファ18に記憶した応答側特徴量の差分に基づいて各応答側機器を特定する構成としている。応答側特徴量の差分とは、いわゆる信号波形の傾斜を見ることに相当し、この応答信号の傾斜の違いによって応答側機器を区別することができる。なお、測定側受信部12a,12bは、装置筐体1の正面1a側において、同じ高さ位置の左右両側に一定の距離L1をあけて配置されている。
【0095】
応答側機器2Cは、測定側機器1Cから送信されてくる測定側特徴量が連続的に変化する発呼信号を受信する応答側受信部21と、応答側受信部21が受信した発呼信号の測定側特徴量に対応して連続的に変化する応答側特徴量を記憶する応答側特徴量記憶部22と、応答側受信部21が発呼信号を受信することにより、応答側特徴量記憶部22に記憶された応答側特徴量に基づいて特徴量が連続的に変化する応答信号を送信する応答側送信部23と、を備えている。
【0096】
実施形態4において、発呼信号及び応答信号は電磁波または音波である。なお、距離の算出処理や位置の特定処理は、実施形態1や実施形態2で説明した通りであるので、ここでは距離の算出処理や位置の特定処理の説明を省略する。
【0097】
上記構成において、実施形態4では、各応答側機器1C1,2C2,2C3から送信される応答信号を区別するために、各応答側機器1C1,2C2,2C3の応答側特徴量を工夫している。
【0098】
実施形態4を例えば具体例1に適用すると、応答側特徴量記憶部22に記憶されている参照テーブル22aを、図20A〜図20Cに示すように設定する。
【0099】
図20Aに示す参照テーブル22a1′は、応答側機器2C1の応答側特徴量記憶部22に記憶されている参照テーブルの一例を示しており、この参照テーブル22a1′では、発呼側特徴量f1に対して応答側特徴量f11が対応付けられており、発呼側特徴量f2に対して応答側特徴量f12が対応付けられており、発呼側特徴量f3に対して応答側特徴量f13が対応付けられており、発呼側特徴量f4に対して応答側特徴量f14が対応付けられている。ここで、隣接する応答側特徴量の差分(f12−f11,f13−f12,f14−f13,・・・)をΔf0とすると、応答側機器2C1の応答側特徴量の差分はΔf0である。
【0100】
また、図20Bに示す参照テーブル22a2′は、応答側機器2C2の応答側特徴量記憶部22に記憶されている参照テーブルの一例を示しており、この参照テーブル22a2′では、発呼側特徴量f1に対して応答側特徴量f11が対応付けられており、発呼側特徴量f2に対して応答側特徴量f13が対応付けられており、発呼側特徴量f3に対して応答側特徴量f15が対応付けられており、発呼側特徴量f4に対して応答側特徴量f17が対応付けられている。従って、応答側機器2C2の応答側特徴量の差分は2Δf0となる。
【0101】
また、図20Cに示す参照テーブル22a3′は、応答側機器2C3の応答側特徴量記憶部22に記憶されている参照テーブルの一例を示しており、この参照テーブル22a3′では、発呼側特徴量f1に対して応答側特徴量f11が対応付けられており、発呼側特徴量f2に対して応答側特徴量f14が対応付けられており、発呼側特徴量f3に対して応答側特徴量f17が対応付けられており、発呼側特徴量f4に対して応答側特徴量f20が対応付けられている。従って、応答側機器2C3の応答側特徴量の差分は3Δf0となる。
【0102】
ここで、応答側特徴量のサンプリング時間は、応答側特徴量が変化していく特定時間Δtaより長い時間(すなわち、サンプリング中に応答側特徴量が必ず1回は変化する時間)とする必要がある。
【0103】
距離算出部15では、受信した応答信号の応答側特徴量の変化に基づいて、上記実施形態1で説明したように、発呼信号を送信してから応答信号を受信するまでの経過時間を算出し、その経過時間からその応答信号に対応する応答側機器までの距離を算出する一方で、特徴量記憶バッファ18に記憶されている応答側特徴量の差分に基づいて、距離を算出した応答側機器がどの機器であるかを特定する。すなわち、特徴量記憶バッファ18に記憶されている応答側特徴量の差分がΔf0である場合には、距離を算出した応答側機器が応答側機器2C1であると特定し、特徴量記憶バッファ18に記憶されている応答側特徴量の差分が2Δf0である場合には、距離を算出した応答側機器が応答側機器2C2であると特定し、特徴量記憶バッファ18に記憶されている応答側特徴量の差分が3Δf0である場合には、距離を算出した応答側機器が応答側機器2C3であると特定することができる。
【0104】
なお、上記各実施形態1〜4では、測定側機器から応答側機器までの算出した距離情報や、特定した位置情報を最終的にどのように利用するのかについては記載していないが、例えば室内に放置された応答側機器(例えば、リモコン)を測定側機器(例えば、テレビジョン受像機)側で探索する場合には、算出した距離情報や特定した位置情報をテレビ画面に表示したり、あるいは音声に変換してスピーカから出力することにより、ユーザに応答側機器の所在を報知することができる。
【0105】
なお、今回開示した実施形態や具体例はすべての点で例示であって、限定的な解釈の根拠となるものではない。従って、本発明の技術的範囲は、上記した実施形態や具体例のみによって解釈されるものではなく、特許請求の範囲の記載に基づいて画定される。また、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれる。
【産業上の利用可能性】
【0106】
本発明の距離検出システムは、テレビジョン受像機とそのリモコン、空気調和機とそのリモコン、オーディオ機器とそのリモコン、画像形成装置とそのリモコン(着脱可能な操作パネル装置)といった、種々の電子機器とそのリモコンとの間の距離検出に利用できるとともに、リモコン以外にも、例えばテレビジョン受像機とオーディオ機器といった電子機器同士の距離検出にも利用できるものである。
【符号の説明】
【0107】
1 装置筐体
1a 正面
1A,1B,1C 測定側機器
2A,2B,2C 応答側機器
11 測定側送信部
12 測定側受信部
13 特徴量解析部
14 タイマー部
15 距離算出部
16 測定側特徴量記憶部
17 位置特定部
18 特徴量記憶バッファ
21 応答側受信部
22 応答側特徴量記憶部
23 応答側送信部
16a,16b,16c 参照テーブル
22a,22b,22c 参照テーブル
【技術分野】
【0001】
本発明は、測定側機器の発呼に対する応答側機器の応答結果に基づいて、測定側機器が応答側機器との間の距離を検出する距離検出システムに関する。
【背景技術】
【0002】
従来から、例えばテレビ受信機とリモートコントローラ(以下、リモコンと略記する)との間の距離や位置を検出する検出装置が提案されている(例えば、特許文献1,2等参照)。
【0003】
特許文献1には、電子機器本体と通信しそのチャンネル切替え等の動作を指令するリモコン等の入力装置と、電子機器本体に装備され入力装置との間で所定の情報を送受信する少なくとも2つの信号送受信部と、各信号送受信部における信号の送受信動作を制御する主制御部とを備え、各信号送受信部を所定間隔を隔てて電子機器本体上の表示部の一方の側と他方の側とに分けて設置し、各信号送受信部の内の少なくとも何れか一方が入力装置に向けて探索信号を発信する探索信号発信機能を有すると共に、入力装置は探索信号に対して応答信号を発信する応答信号発信機能を有し、主制御部は、各信号送受信部で受信される応答信号の受信タイミング及び探索信号の発信タイミングにかかる時間情報に基づいて当該各信号送受信部と入力装置との間の距離を算定すると共に入力装置の位置を特定する位置演算特定機能を備えた位置検出装置が開示されている。
【0004】
また、特許文献2には、リモコンへの信号送信を行う信号送信手段、リモコンからの信号受信を行う信号受信手段、使用者が直接操作可能な入力手段、及び、入力手段によるリモコン位置検出信号を送信する手段を備える電気機器本体と、電気機器本体からの信号受信を行う信号受信手段、電気機器本体への信号送信を行う信号送信手段、及び、リモコン位置検出信号を受信した際には直ちにリモコン位置検出確認信号を電気機器本体へ送信する手段を備えるリモコンと、により構成された電気機器において、電気機器本体は、リモコン位置検出信号を送信後から、リモコン位置検出確認信号を受信するまでの時間を計測し、この計測時間に基づいて電気機器本体とリモコンとの距離を演算するリモコン位置検出装置が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−99194号公報
【特許文献2】特開2004−304408号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1記載の位置検出装置は、2つの信号送受信部で受信される応答信号の受信タイミング及び探索信号の発信タイミングにかかる時間情報に基づいて各信号送受信部と入力装置との間の距離を算定するようになっている。すなわち、電子機器本体と入力装置との間の距離を算定するためには、少なくとも2つの信号送受信部を設ける必要があり、1つの信号送受信部だけでは距離を算定できないといった問題があった。また、探索信号や応答信号自体には特徴が無いため、信号の特徴によって距離を算出することもできないといった問題もあった。
【0007】
また、特許文献2記載のリモコン位置検出装置は、リモコン位置検出信号を送信後から、リモコン位置検出確認信号を受信するまでの時間を計測し、この計測時間に基づいて電気機器本体とリモコンとの距離を演算する構成となっているが、具体的にどのように演算するのかについては記載されていない。また、リモコン位置検出信号やリモコン位置検出確認信号自体には特徴が無いため、信号の特徴によって距離を算出することができないといった問題があった。
【0008】
本発明はかかる問題点を解決すべく創案されたもので、その目的は、測定側機器からの発呼信号とこれに対応する応答側機器からの応答信号とにそれぞれ連続的に変化する特徴量を持たせることにより、その特徴量に基づいて測定側機器から応答側機器までの距離の算出を可能とした距離検出システムを提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するため、本発明の距離検出システムは、測定側機器と応答側機器との間で信号の送受信を行うことにより、前記測定側機器の発呼に対する前記応答側機器の応答結果に基づいて、前記測定側機器が前記応答側機器との間の距離を検出する距離検出システムであって、前記応答側機器は、前記測定側機器から送信されてくる測定側特徴量が連続的に変化する発呼信号を受信する応答側受信部と、前記応答側受信部が受信した前記発呼信号の前記測定側特徴量に対応して連続的に変化する応答側特徴量を記憶する応答側特徴量記憶部と、前記応答側受信部が前記発呼信号を受信することにより、前記応答側特徴量記憶部に記憶された応答側特徴量に基づいて特徴量が連続的に変化する応答信号を送信する応答側送信部と、を備え、前記測定側機器は、前記発呼信号を送信する測定側送信部と、前記応答側機器から送信されてくる前記応答信号を受信する測定側受信部と、受信した前記応答信号の前記応答側特徴量を解析する特徴量解析部と、前記発呼信号を送信したタイミングから一定時間経過後に前記応答側機器から受信した前記応答信号の前記応答側特徴量の解析結果に基づいて、前記測定側機器と前記応答側機器との間の距離を算出する距離算出部と、を備えたことを特徴としている。ここで、前記発呼信号及び前記応答信号は電磁波または音波である。
【0010】
上記構成によれば、連続的に変化する応答信号の特徴量に基づき、特徴量がどの段階の変化であるかを解析することによって、応答側機器までの距離を正確に算出することができる。
【0011】
また、本発明では、前記測定側特徴量及び前記応答側特徴量の連続的な変化を周波数の変化としている。すなわち、発呼信号や応答信号を、例えばf0からf1,f2,f3,・・・と周波数が連続的に高くなる(若しくは低くなる)信号としている。これにより、どの周波数レベルの信号を受信したのかを判定することで、応答側機器までの距離を正確に算出することができる。
【0012】
また、本発明では、前記測定側特徴量及び前記応答側特徴量の連続的な変化を振幅の変化としている。すなわち、発呼信号や応答信号を、例えばw0からw1,w2,w3,・・・というように振幅が連続的に大きくなる(若しくは小さくなる)信号としている。これにより、どの振幅レベルの信号を受信したのかを判定することで、応答側機器までの距離を正確に算出することができる。
【0013】
また、本発明では、前記測定側特徴量及び前記応答側特徴量の連続的な変化を振幅の中心からの変化量としている。特徴量の連続的な変化を振幅中心からの変化量とすることで、1周期分のサンプリングで応答信号の特徴量を解析することができるので、解析時間を短縮することができる。
【0014】
また、本発明では、前記測定側機器は、前記応答側特徴量記憶部に記憶されている応答側特徴量を記憶する測定側特徴量記憶部を備え、前記特徴量解析部は、前記発呼信号を送信したタイミングから一定時間経過後に前記応答側機器から受信した前記応答信号の応答側特徴量と前記測定側特徴量記憶部に記憶されている応答側特徴量とを照合することによって特徴量の解析を行う構成としている。このような構成によれば、応答側特徴量の解析を確実に行うことができる。
【0015】
また、本発明では、前記測定側機器は、前記測定側受信部を複数備えるとともに、前記応答側機器の位置を特定する位置特定部を備え、前記特徴量解析部は、前記複数の測定側受信部で受信した前記複数の応答信号ごとに応答側特徴量を解析し、前記距離算出部は、前記複数の応答信号ごとの前記応答側特徴量の解析結果に基づいて、前記複数の測定側受信部と前記応答側機器との間の距離をそれぞれ算出し、前記位置特定部は、前記算出結果に基づいて前記応答側機器の位置を特定する構成としている。測定側受信部を、例えば測定側機器の正面の左右両側に2個配置する構成とすることで、両測定側受信部でそれぞれ受信する応答信号の時間差に基づいて応答側機器の位置を特定することができる。
【0016】
また、本発明では、前記応答側機器を複数備え、前記応答側機器の前記応答側特徴量記憶部に記憶されている応答側特徴量が前記応答側機器ごとに異なる設定としている。応答側特徴量記憶部に記憶されている応答側特徴量を応答側機器ごとに異なる設定とすることにより、測定側機器で複数の応答側機器を区別することができる。
【0017】
また、本発明では、前記一定時間の前後にサンプリングした応答側特徴量を記憶する特徴量記憶バッファを備え、前記距離算出部は、前記特徴量記憶バッファに記憶した応答側特徴量の差分に基づいて前記応答側機器を特定する構成としてもよい。応答側特徴量の差分とは、いわゆる信号波形の傾斜を見ることに相当し、この応答信号の傾斜の違いによって応答側機器を区別することができる。
【0018】
また、本発明では、前記測定側機器は、前記発呼信号を送信したタイミングから前記一定時間より短い所定時間の間はサンプリングを行わない、または、計測結果をマスクする構成としてもよい。発呼信号を送信したタイミングから所定時間T2の間、サンプリングを行わない、または、計測結果をマスクすることによって、発呼信号の反射や他のノイズ信号の影響等による誤検知を防止することができる。
【0019】
また、本発明では、前記測定側機器を画像形成装置本体に適用し、前記応答側機器を前記画像形成装置本体から着脱自在な操作パネル装置に適用することによって、画像形成装置にも本発明の距離検出システムを適用することが可能である。本発明によれば、画像形成装置本体から取り外した操作パネル装置の所在を容易に把握することができる。
【発明の効果】
【0020】
本発明によれば、連続的に変化する応答信号の特徴量に基づき、特徴量がどの段階の変化であるかを解析することによって、応答側機器までの距離を正確に算出することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態1に係る距離検出システムの全体構成図である。
【図2A】実施形態1に係る測定側機器の電気的構成を示す機能ブロック図である。
【図2B】実施形態1に係る応答側機器の電気的構成を示す機能ブロック図である。
【図3】測定側特徴量の連続的な変化の具体例1を説明する図である。
【図4】応答側特徴量記憶部に格納されている参照テーブルの具体例1に係る特徴量の変化を示す説明図である。
【図5】測定側特徴量記憶部に格納されている参照テーブルの具体例1に係る特徴量の変化を示す説明図である。
【図6】(a)は、測定側機器と応答側機器との間の距離を算出する測定側機器の処理動作を示すフローチャート、(b)は、測定側機器と応答側機器との間の距離を算出する応答側機器の処理動作を示すフローチャートである。
【図7】応答側特徴量の連続的な変化の具体例1を説明する図である。
【図8】測定側特徴量の連続的な変化の具体例2を説明する図である。
【図9】応答側特徴量記憶部に格納されている参照テーブルの具体例2に係る特徴量の変化を示す説明図である。
【図10】測定側特徴量記憶部に格納されている参照テーブルの具体例2に係る特徴量の変化を示す説明図である。
【図11】応答側特徴量の連続的な変化の具体例2を説明する図である。
【図12】測定側特徴量の連続的な変化の具体例3を説明する図である。
【図13】応答側特徴量記憶部に格納されている参照テーブルの具体例3に係る構成例を示す説明図である。
【図14】測定側特徴量記憶部に格納されている参照テーブルの具体例3に係る構成例を示す説明図である。
【図15】応答側特徴量の連続的な変化の具体例3を説明する図である。
【図16A】実施形態2に係る測定側機器の電気的構成を示す機能ブロック図である。
【図16B】実施形態2に係る応答側機器の電気的構成を示す機能ブロック図である。
【図17】実施形態3に係る距離検出システムの全体構成図である。
【図18A】実施形態3を例えば具体例1に適用した場合の、各応答側特徴量記憶部に記憶されている参照テーブルの構成例を示す説明図である。
【図18B】実施形態3を例えば具体例1に適用した場合の、各応答側特徴量記憶部に記憶されている参照テーブルの構成例を示す説明図である。
【図18C】実施形態3を例えば具体例1に適用した場合の、各応答側特徴量記憶部に記憶されている参照テーブルの構成例を示す説明図である。
【図19A】実施形態4に係る測定側機器の電気的構成を示す機能ブロック図である。
【図19B】実施形態4に係る応答側機器の電気的構成を示す機能ブロック図である。
【図20A】実施形態4を例えば具体例1に適用した場合の、各応答側特徴量記憶部に記憶されている参照テーブルの構成例を示す説明図である。
【図20B】実施形態4を例えば具体例1に適用した場合の、各応答側特徴量記憶部に記憶されている参照テーブルの構成例を示す説明図である。
【図20C】実施形態4を例えば具体例1に適用した場合の、各応答側特徴量記憶部に記憶されている参照テーブルの構成例を示す説明図である。
【発明を実施するための形態】
【0022】
以下、本発明の実施の形態について、図面を参照して説明する。
【0023】
−実施形態1−
図1は、本発明の実施形態1に係る距離検出システムの全体構成図である。
【0024】
実施形態1に係る距離検出システムは、距離を測定する測定側機器1Aと、測定側機器1Aの発呼に対して応答する応答側機器2Aとを備え、測定側機器1Aと応答側機器2Aとの間で信号の送受信を行うことにより、測定側機器1Aの発呼に対する応答側機器2Aの応答結果に基づいて、測定側機器1Aが応答側機器2Aとの間の距離を検出(算出)する構成となっている。
【0025】
ここで、測定側機器1Aとしては、例えばテレビジョン受像機を想定することができ、応答側機器2Aとしては、例えばリモートコントローラ(リモコン)を想定することができる。ただし、このようなテレビジョン受像機やリモコンに限定されるものではなく、例えば空気調和機とそのリモコン、オーディオ機器とそのリモコン、さらには画像形成装置とそのリモコン(着脱可能な操作パネル装置)といった具合に、種々の電子機器とそのリモコンとに適用することができる。また、応答側機器2Aもリモコン以外の電子機器であってもよい。例えば、テレビジョン受像機とオーディオ機器といった電子機器同士の距離検出であってもよい。
【0026】
図2Aは、測定側機器1Aの電気的構成を示す機能ブロック図、図2Bは、応答側機器2Aの電気的構成を示す機能ブロック図である。
【0027】
測定側機器1Aは、測定側特徴量が連続的に変化する発呼信号を送信する測定側送信部11と、応答側機器2Aから送信されてくる応答信号を受信する測定側受信部12と、受信した応答信号の応答側特徴量を解析する特徴量解析部13と、発呼信号を送信したタイミングから一定時間を計測するタイマー部14と、応答側機器2Aから受信した応答信号の応答側特徴量の解析結果に基づいて、一定時間経過後に測定側機器1Aと応答側機器2Aとの間の距離を算出する距離算出部15と、後述する応答側特徴量記憶部22に記憶されている応答側特徴量を記憶する測定側特徴量記憶部16と、を備えている。
【0028】
応答側機器2Aは、測定側機器1Aから送信されてくる測定側特徴量が連続的に変化する発呼信号を受信する応答側受信部21と、応答側受信部21が受信した発呼信号の測定側特徴量に対応して連続的に変化する応答側特徴量を記憶する応答側特徴量記憶部22と、応答側受信部21が発呼信号を受信することにより、応答側特徴量記憶部22に記憶された応答側特徴量に基づいて特徴量が連続的に変化する応答信号を送信する応答側送信部23と、を備えている。また、発呼信号及び応答信号は電磁波または音波である。
【0029】
以下、実施形態1に係る距離検出システムにおける距離検出処理の具体例について説明する。
【0030】
(具体例1)
具体例1では、測定側特徴量及び応答側特徴量の連続的な変化を周波数の変化としている。
【0031】
ここで、測定側特徴量及び応答側特徴量の連続的な変化について具体的に説明する。
【0032】
測定側機器1Aの測定側送信部11から送信される測定側特徴量が連続的に変化する発呼信号とは、例えば図3に示すように、起点となる周波数f1からf2,f3,f4,・・・,fnと、予め設定された特定時間(Δta)ごとに周波数が連続的に(この例では段階的に)高くなっていく信号としている。若しくは、これとは逆に、起点となる周波数fnから,・・・,f3,f2,f1と、予め設定された特定時間(Δta)ごとに周波数が連続的に(この例では段階的に)低くなっていく信号としてもよい。すなわち、発呼信号は、時刻t0に発呼されると、その時点からΔta後の時刻t1までは周波数f1の信号を送信し、時刻t1からΔta後の時刻t2までは周波数f2の信号を送信し、時刻t2からΔta後の時刻t3までは周波数f3の信号を送信し、時刻t3からΔta後の時刻t4までは周波数f4の信号を送信し、・・・、時刻tn−1からΔta後の時刻tnまでは周波数fnの信号を送信するようになっている。つまり、Δtaごとにf1,f2,f3,f4,・・・,fnと、周波数が連続的に変化する発呼信号を送信するようになっている。
【0033】
一方、応答側機器2Aの応答側特徴量記憶部22には、図4に示すように、測定側特徴量が連続的に変化する発呼信号に対応して連続的に変化させる応答側特徴量を記憶した参照テーブル22aが格納されている。この参照テーブル22aでは、発呼側特徴量f1に対して応答側特徴量f11が対応付けられており、発呼側特徴量f2に対して応答側特徴量f12が対応付けられており、発呼側特徴量f3に対して応答側特徴量f13が対応付けられており、発呼側特徴量f4に対して応答側特徴量f14が対応付けられており、・・・、発呼側特徴量fnに対して応答側特徴量f1nが対応付けられている。
【0034】
また、測定側機器1Aの測定側特徴量記憶部16にも、図5に示すように、図4に示した参照テーブル22aと同様の参照テーブル16aが記憶されている。
【0035】
次に、上記構成の測定側機器1Aと応答側機器2Aとにおいて、測定側機器1Aと応答側機器2Aとの間の距離を算出する処理動作について、図6(a),(b)に示すフローチャートを参照して説明する。ただし、図6(a)は測定側機器1Aの処理動作を示すフローチャート、図6(b)は応答側機器2Aの処理動作を示すフローチャートである。
【0036】
まず、測定側機器1Aの測定側送信部11から図3に示すパターンで測定側特徴量が連続的に変化する発呼信号を送信し(ステップS11)、この送信と同時に、タイマー部14を起動して一定時間T1の計測を開始する(ステップS12)。この後、応答側機器2Aからの応答信号の受信の有無を監視する(ステップS13)。
【0037】
応答側機器2Aは、測定側機器1Aからの発呼信号の有無を常に監視している(ステップS21)。そして、発呼信号を応答側受信部21で受信すると(ステップS21でYesと判断されると)、応答側特徴量記憶部22に記憶されている図4に示す参照テーブル22aを参照して、受信した発呼信号の発呼側特徴量に対応する応答側特徴量の応答信号を応答側送信部23から送信する(ステップS22)。
【0038】
ステップS22の処理を具体的に説明すると、発呼側特徴量がf1である周波数の発呼信号を受信している間は、応答側特徴量がf11である周波数の応答信号を送信し、発呼側特徴量がf2である周波数の発呼信号を受信している間は、応答側特徴量がf12である周波数の応答信号を送信し、発呼側特徴量がf3である周波数の発呼信号を受信している間は、応答側特徴量がf13である周波数の応答信号を送信し、発呼側特徴量がf4である周波数の発呼信号を受信している間は、応答側特徴量がf14である周波数の応答信号を送信し、・・・、発呼側特徴量がfnである周波数の発呼信号を受信している間は、応答側特徴量がf1nである周波数の応答信号を送信する。すなわち、応答側機器2Aから送信される応答信号は、図7に示すように、発呼信号を受信した時点t10からΔta後の時刻t11までは周波数f11の信号を送信し、時刻t11からΔta後の時刻t12までは周波数f12の信号を送信し、時刻t12からΔta後の時刻t13までは周波数f13の信号を送信し、時刻t13からΔta後の時刻t14までは周波数f14の信号を送信し、・・・、時刻t1n−1からΔta後の時刻t1nまでは周波数f1nの信号を送信するようになっている。つまり、Δtaごとにf11,f12,f13,f14,・・・,f1nと、周波数が連続的に変化する応答信号を送信するようになっている。
【0039】
一方、測定側機器1Aは、タイマー部14によって一定時間T1の計測を終了すると(ステップS13でYesと判断されると)、その時点で測定側受信部12によって応答信号を受信しているか否かを判断する(ステップS14)。その結果、応答信号を受信している場合(ステップS14でYesと判断された場合)には、特徴量解析部13によって受信している応答信号の応答側特徴量を解析する(ステップS15)。
【0040】
ステップS15の処理を具体的に説明すると、一定時間T1が経過した時点から複数周期分の間の時間Δtaa(≦Δta)だけ応答信号をサンプリングして、応答信号の周波数(応答側特徴量)を計測する。その結果、現在受信している応答信号の応答側特徴量が例えば周波数f14であった場合、特徴量解析部13は、測定側特徴量記憶部16に記憶されている参照テーブル16a(図5)を参照して、応答信号の応答側特徴量が周波数f14であることを確認し、その確認信号を解析結果として距離算出部15に出力する。
【0041】
距離算出部15は、受け取った解析結果の確認信号に基づき、発呼信号を送信してからの経過時間を算出する(ステップS16)。
【0042】
ステップS16の処理を具体的に説明すると、距離算出部15は、確認信号に基づき、測定側特徴量記憶部16に記憶されている参照テーブル16aを参照して、周波数f14が、自機が送信した周波数f4に対応する周波数であることを確認する。つまり、一定時間T1を経過した時点で周波数f14の応答信号を受信していることを確認する。ここで、周波数f4の発呼信号は、図3に示すように、最初に発呼信号を送信した時刻t0から(Δta×3)だけ送れた時刻t3に送信されているので、周波数f4の発呼信号を送信してから、一定時間T1後にこれに対応する周波数f14の応答信号を受信するまでの時間txは、発呼信号を受信してから応答信号を送信するまでに応答側機器2A側で処理に要する時間をΔrとすると、式(1)
tx=(T1−Δta×3−Δr)÷2 ・・・(1)
によって求めることができる。
【0043】
従って、距離算出部15は、この求めた時間txに応答信号の速度Vを掛け合わせることによって、測定側機器1Aから応答側機器2Aまでの距離Lxを算出する。
【0044】
ここで、発呼信号及び応答信号が音波(V=340m/sec)の場合について、具体的に数値を当てはめて説明すると、T1が例えば20msec、Δtaが1msec、Δrが0.1msecであるとすると、tx=(20−1×3−1)÷2=8(msec)となる。従って、この場合の測定側機器1Aから応答側機器2Aまでの距離Lxは、340×0.008=2.72(m)となる。
【0045】
上記したように、具体例1によれば、発呼信号を送信してから一定時間T1が経過した時点でどの周波数レベルの応答信号を受信したのかを確認することで、測定側機器1Aから応答側機器2Aまでの距離を正確に算出することができる。
【0046】
(具体例2)
具体例2では、測定側特徴量及び応答側特徴量の連続的な変化を振幅の変化としている。
【0047】
なお、具体例2の測定側機器及び応答側機器の機能ブロックの構成は、図2A及び図2Bに示した測定側機器1A及び応答側機器2Aの機能ブロックの構成と同じであるので、ここでは図2A及び図2Bで用いた符号を用いて各ブロックの説明を行うものとする。
【0048】
測定側機器1Aの測定側送信部11から送信される測定側特徴量が連続的に変化する発呼信号とは、例えば図8に示すように、起点となる振幅w1からw2,w3,w4,・・・,wnと、予め設定された特定時間(Δta)ごとに振幅が連続的に(この例では段階的に)大きくなっていく信号としている。若しくは、これとは逆に、起点となる振幅wnから,・・・,w3,w2,w1と、予め設定された特定時間(Δta)ごとに振幅が連続的に(この例では段階的に)小さくなっていく信号としてもよい。すなわち、発呼信号は、時刻t0に発呼されると、その時点からΔta後の時刻t1までは周波数一定で振幅がw1の信号を送信し、時刻t1からΔta後の時刻t2までは周波数一定で振幅がw2の信号を送信し、時刻t2からΔta後の時刻t3までは周波数が一定で振幅がw3の信号を送信し、時刻t3からΔta後の時刻t4までは周波数が一定で振幅がw4の信号を送信し、・・・、時刻tn−1からΔta後の時刻tnまでは周波数が一定で振幅がwnの信号を送信するようになっている。つまり、Δtaごとにw1,w2,w3,w4,・・・,wnと振幅が連続的に変化する発呼信号を送信するようになっている。
【0049】
一方、応答側機器2Aの応答側特徴量記憶部22には、図9に示すように、測定側特徴量が連続的に変化する発呼信号に対応して連続的に変化させる応答側特徴量を記憶した参照テーブル22bが格納されている。この参照テーブル22bでは、発呼側特徴量w1に対して応答側特徴量w11が対応付けられており、発呼側特徴量w2に対して応答側特徴量w12が対応付けられており、発呼側特徴量w3に対して応答側特徴量w13が対応付けられており、発呼側特徴量w4に対して応答側特徴量w14が対応付けられており、・・・、発呼側特徴量wnに対して応答側特徴量w1nが対応付けられている。
【0050】
また、測定側機器1Aの測定側特徴量記憶部16にも、図10に示すように、図9に示した参照テーブル22bと同様の参照テーブル16bが記憶されている。
【0051】
次に、上記構成の測定側機器1Aと応答側機器2Aとにおいて、測定側機器1Aと応答側機器2Aとの間の距離を算出する処理動作について、具体例1でも用いた図6(a),(b)に示すフローチャートを参照して説明する。
【0052】
まず、測定側機器1Aの測定側送信部11から図8に示すパターンで測定側特徴量が連続的に変化する発呼信号を送信し(ステップS11)、この送信と同時に、タイマー部14を起動して一定時間T1の計測を開始する(ステップS12)。この後、応答側機器2Aからの応答信号の受信の有無を監視する(ステップS13)。
【0053】
応答側機器2Aは、測定側機器1Aからの発呼信号の有無を常に監視している(ステップS21)。そして、発呼信号を応答側受信部21で受信すると(ステップS21でYesと判断されると)、応答側特徴量記憶部22に記憶されている図9に示す参照テーブル22bを参照して、受信した発呼信号の発呼側特徴量に対応する応答側特徴量の応答信号を応答側送信部23から送信する(ステップS22)。
【0054】
ステップS22の処理を具体的に説明すると、発呼側特徴量がw1である振幅の発呼信号を受信している間は、応答側特徴量がw11である振幅の応答信号を送信し、発呼側特徴量がw2である振幅の発呼信号を受信している間は、応答側特徴量がw12である振幅の応答信号を送信し、発呼側特徴量がw3である振幅の発呼信号を受信している間は、応答側特徴量がw13である振幅の応答信号を送信し、発呼側特徴量がw4である振幅の発呼信号を受信している間は、応答側特徴量がw14である振幅の応答信号を送信し、・・・、発呼側特徴量がwnである振幅の発呼信号を受信している間は、応答側特徴量がw1nである振幅の応答信号を送信する。すなわち、応答側機器2Aから送信される応答信号は、図11に示すように、発呼信号を受信した時点t10からΔta後の時刻t11までは周波数一定で振幅w11の信号を送信し、時刻t11からΔta後の時刻t12までは周波数一定で振幅w12の信号を送信し、時刻t12からΔta後の時刻t13までは周波数一定で振幅w13の信号を送信し、時刻t13からΔta後の時刻t14までは周波数一定で振幅w14の信号を送信し、・・・、時刻t1n−1からΔta後の時刻t1nまでは周波数一定で振幅w1nの信号を送信するようになっている。つまり、Δtaごとにw11,w12,w13,w14,・・・,w1nと、振幅が連続的に変化する応答信号を送信するようになっている。
【0055】
一方、測定側機器1Aは、タイマー部14によって一定時間T1の計測を終了すると(ステップS13でYesと判断されると)、その時点で測定側受信部12によって応答信号を受信しているか否かを判断する(ステップS14)。その結果、応答信号を受信している場合(ステップS14でYesと判断された場合)には、特徴量解析部13によって受信している応答信号の応答側特徴量を解析する(ステップS15)。
【0056】
ステップS15の処理を具体的に説明すると、一定時間T1が経過した時点から1周期分の時間Δtaa(≦Δta)だけ応答信号をサンプリングして、応答信号の振幅(応答側特徴量)を計測する。その結果、現在受信している応答信号の応答側特徴量が例えば振幅w14であった場合、特徴量解析部13は、測定側特徴量記憶部16に記憶されている参照テーブル16b(図10)を参照して、応答信号の応答側特徴量が振幅w14であることを確認し、その確認信号を解析結果として距離算出部15に出力する。
【0057】
距離算出部15は、受け取った解析結果の確認信号に基づき、発呼信号を送信してからの経過時間を算出する(ステップS16)。
【0058】
ステップS16の処理を具体的に説明すると、距離算出部15は、確認信号に基づき、測定側特徴量記憶部16に記憶されている参照テーブル16bを参照して、振幅w14が、自機が送信した振幅wf4に対応する振幅であることを確認する。つまり、一定時間T1を経過した時点で振幅w14の応答信号を受信していることを確認する。ここで、振幅w4の発呼信号は、図8に示すように、最初に発呼信号を送信した時刻t0から(Δta×3)だけ送れた時刻t3に送信されているので、振幅w4の発呼信号を送信してから、一定時間T1後にこれに対応する振幅w14の応答信号を受信するまでの時間txは、発呼信号を受信してから応答信号を送信するまでに応答側機器2A側で処理に要する時間をΔrとすると、式(2)
tx=(T1−Δta×3−Δr)÷2 ・・・(2)
によって求めることができる。
【0059】
従って、距離算出部15は、この求めた時間txに応答信号の速度Vを掛け合わせることによって、測定側機器1Aから応答側機器2Aまでの距離を算出する。
【0060】
上記したように、具体例2によれば、発呼信号を送信してから一定時間T1が経過した時点でどの振幅レベルの応答信号を受信したのかを確認することで、測定側機器1Aから応答側機器2Aまでの距離を正確に算出することができる。
【0061】
(具体例3)
具体例3では、測定側特徴量及び応答側特徴量の連続的な変化を振幅の中心からの変化量としている。
【0062】
なお、具体例3の測定側機器及び応答側機器の機能ブロックの構成は、図2A及び図2Bに示した測定側機器1A及び応答側機器2Aの機能ブロックの構成と同じであるので、ここでは図2A及び図2Bで用いた符号を用いて各ブロックの説明を行うものとする。
【0063】
測定側機器1Aの測定側送信部11から送信される測定側特徴量が連続的に変化する発呼信号とは、例えば図12に示すように、起点となる振幅の中心からの変化量d1からd2,d3,d4,・・・,dnと、予め設定された特定時間(Δta)ごとに振幅の中心からの変化量(中心からの距離)が連続的に(この例では段階的に)大きくなっていく信号としている。若しくは、これとは逆に、起点となる振幅の中心からの変化量dnから,・・・,d3,d2,d1と、予め設定された特定時間(Δta)ごとに振幅の中心からの変化量が連続的に(この例では段階的に)小さくなっていく信号としてもよい。すなわち、発呼信号は、時刻t0に発呼されると、その時点からΔta後の時刻t1までは周波数一定で振幅の中心からの変化量がd1の信号を送信し、時刻t1からΔta後の時刻t2までは周波数一定で振幅の中心からの変化量がd2の信号を送信し、時刻t2からΔta後の時刻t3までは周波数が一定で振幅の中心からの変化量がd3の信号を送信し、時刻t3からΔta後の時刻t4までは周波数が一定で振幅の中心からの変化量がd4の信号を送信し、・・・、時刻tn−1からΔta後の時刻tnまでは周波数が一定で振幅の中心からの変化量がdnの信号を送信するようになっている。つまり、Δtaごとにd1,d2,d3,d4,・・・,dnと振幅の中心からの変化量が連続的に変化する発呼信号を送信するようになっている。
【0064】
一方、応答側機器2Aの応答側特徴量記憶部22には、図13に示すように、測定側特徴量が連続的に変化する発呼信号に対応して連続的に変化させる応答側特徴量を記憶した参照テーブル22cが格納されている。この参照テーブル22cでは、発呼側特徴量d1に対して応答側特徴量d11が対応付けられており、発呼側特徴量d2に対して応答側特徴量d12が対応付けられており、発呼側特徴量d3に対して応答側特徴量d13が対応付けられており、発呼側特徴量d4に対して応答側特徴量d14が対応付けられており、・・・、発呼側特徴量dnに対して応答側特徴量d1nが対応付けられている。
【0065】
また、測定側機器1Aの測定側特徴量記憶部16にも、図14に示すように、図13に示した参照テーブル22cと同様の参照テーブル16cが記憶されている。
【0066】
次に、上記構成の測定側機器1Aと応答側機器2Aとにおいて、測定側機器1Aと応答側機器2Aとの間の距離を算出する処理動作について、具体例1,2でも用いた図6(a),(b)に示すフローチャートを参照して説明する。
【0067】
まず、測定側機器1Aの測定側送信部11から図12に示すパターンで測定側特徴量が連続的に変化する発呼信号を送信し(ステップS11)、この送信と同時に、タイマー部14を起動して一定時間T1の計測を開始する(ステップS12)。この後、応答側機器2Aからの応答信号の受信の有無を監視する(ステップS13)。
【0068】
応答側機器2Aは、測定側機器1Aからの発呼信号の有無を常に監視している(ステップS21)。そして、発呼信号を応答側受信部21で受信すると(ステップS21でYesと判断されると)、応答側特徴量記憶部22に記憶されている図13に示す参照テーブル22cを参照して、受信した発呼信号の発呼側特徴量に対応する応答側特徴量の応答信号を応答側送信部23から送信する(ステップS22)。
【0069】
ステップS22の処理を具体的に説明すると、発呼側特徴量がd1である発呼信号を受信している間は、応答側特徴量がd11である応答信号を送信し、発呼側特徴量がd2である発呼信号を受信している間は、応答側特徴量がd12である応答信号を送信し、発呼側特徴量がd3である周波数の発呼信号を受信している間は、応答側特徴量がd13である応答信号を送信し、発呼側特徴量がd4である発呼信号を受信している間は、応答側特徴量がd14である応答信号を送信し、・・・、発呼側特徴量がdnである発呼信号を受信している間は、応答側特徴量がd1nである応答信号を送信する。すなわち、応答側機器2Aから送信される応答信号は、図15に示すように、発呼信号を受信した時点t10からΔta後の時刻t11までは周波数一定で振幅の中心からの変化量がd11の信号を送信し、時刻t11からΔta後の時刻t12までは周波数一定で振幅の中心からの変化量がd12の信号を送信し、時刻t12からΔta後の時刻t13までは周波数一定で振幅の中心からの変化量がd13の信号を送信し、時刻t13からΔta後の時刻t14までは周波数一定で振幅の中心からの変化量がd14の信号を送信し、・・・、時刻t1n−1からΔta後の時刻t1nまでは周波数一定で振幅の中心からの変化量がd1nの信号を送信するようになっている。つまり、Δtaごとにd11,d12,d13,d14,・・・,d1nと、振幅の中心からの変化量が連続的に変化する応答信号を送信するようになっている。
【0070】
一方、測定側機器1Aは、タイマー部14によって一定時間T1の計測を終了すると(ステップS13でYesと判断されると)、その時点で測定側受信部12によって応答信号を受信しているか否かを判断する(ステップS14)。その結果、応答信号を受信している場合(ステップS14でYesと判断された場合)には、特徴量解析部13によって受信している応答信号の応答側特徴量を解析する(ステップS15)。
【0071】
ステップS15の処理を具体的に説明すると、一定時間T1が経過した時点から1周期分の時間Δtaa(≦Δta)だけ応答信号をサンプリングして、応答信号の振幅の中心からの変化量(応答側特徴量)を計測する。その結果、現在受信している応答信号の応答側特徴量が例えばd14であった場合、特徴量解析部13は、測定側特徴量記憶部16に記憶されている参照テーブル16c(図14)を参照して、応答信号の応答側特徴量がd14であることを確認し、その確認信号を解析結果として距離算出部15に出力する。
【0072】
距離算出部15は、受け取った解析結果の確認信号に基づき、発呼信号を送信してからの経過時間を算出する(ステップS16)。
【0073】
ステップS16の処理を具体的に説明すると、距離算出部15は、確認信号に基づき、測定側特徴量記憶部16に記憶されている参照テーブル16cを参照して、振幅の中心からの変化量d14が、自機が送信した振幅の中心からの変化量wf4に対応する信号であることを確認する。つまり、一定時間T1を経過した時点で振幅の中心からの変化量がd14の応答信号を受信していることを確認する。ここで、振幅の中心からの変化量がd4の発呼信号は、図12に示すように、最初に発呼信号を送信した時刻t0から(Δta×3)だけ送れた時刻t3に送信されているので、振幅の中心からの変化量がd4の発呼信号を送信してから、一定時間T1後にこれに対応する振幅の中心からの変化量がd14の応答信号を受信するまでの時間txは、発呼信号を受信してから応答信号を送信するまでに応答側機器2A側で処理に要する時間をΔrとすると、式(3)
tx=(T1−Δta×3−Δr)÷2 ・・・(3)
によって求めることができる。
【0074】
従って、距離算出部15は、この求めた時間txに応答信号の速度Vを掛け合わせることによって、測定側機器1Aから応答側機器2Aまでの距離を算出する。
【0075】
上記したように、具体例3によれば、発呼信号を送信してから一定時間T1が経過した時点でどの変化量レベルの応答信号を受信したのかを確認することで、測定側機器1Aから応答側機器2Aまでの距離を正確に算出することができる。
【0076】
なお、上記具体例1〜3では、発呼信号の特徴量と応答信号の特徴量とを、同じ特徴量としている。すなわち、発呼信号の特徴量が周波数であれば応答信号の特徴量も周波数とし、発呼信号の特徴量が振幅であれば応答信号の特徴量も振幅とし、発呼信号の特徴量が振幅の中心からの変化量であれば応答信号の特徴量も振幅の中心からの変化量としている。しかし、発呼信号と応答信号とは、異なる機器から送信される異なる信号であるので、必ずしも発呼信号の特徴量と応答信号の特徴量とを同じ特徴量とする必要はない。例えば、発呼信号の特徴量を周波数とし、応答信号の特徴量を振幅または振幅の中心からの変化量としてもよく、また、発呼信号の特徴量を振幅とし、応答信号の特徴量を周波数または振幅の中心からの変化量としてもよく、また、発呼信号の特徴量を振幅の中心からの変化量とし、応答信号の特徴量を周波数または振幅としてもよい。これらの場合、応答側特徴量記憶部22及び測定側特徴量記憶部16に記憶する参照テーブルをこれらの組み合わせに対応するように作成しておけばよい。
【0077】
また、上記具体例1〜3では、一定時間T1経過後に応答側機器から受信した応答信号の応答特徴量に基づいて、応答側機器までの距離を算出する構成としているが、このとき、測定側機器1Aは、発呼信号を送信したタイミングから一定時間T1より短い所定時間T2(<T1)の間は応答信号を受信していてもそのサンプリングを行わない、または、応答信号をサンプリングしたとしてもその計測結果をマスクする構成としてもよい。発呼信号を送信したタイミングから所定時間T2の間、サンプリングを行わない、または、計測結果をマスクすることによって、発呼信号の反射や他のノイズ信号の影響等による誤検知を防止することができる。
【0078】
−実施形態2−
実施形態1に係る距離検出システムは、測定側機器1Aから応答側機器2Aまでの距離を算出する構成としているが、実施形態2に係る距離検出システムは、測定側機器1Bから応答側機器2Bまでの距離の算出に加え、その距離から応答側機器1Bの位置を特定する構成としている。
【0079】
図16Aは、実施形態2に係る測定側機器1Bの電気的構成を示す機能ブロック図、図16Bは、実施形態2に係る応答側機器2Bの電気的構成を示す機能ブロック図である。
【0080】
測定側機器1Bは、測定側特徴量が連続的に変化する発呼信号を送信する測定側送信部11と、応答側機器2Bから送信されてくる応答信号を受信する複数個(この例では2個)の測定側受信部12a,12bと、受信した応答信号の応答側特徴量を解析する特徴量解析部13と、発呼信号を送信したタイミングから一定時間を計測するタイマー部14と、応答側機器2Bから受信した応答信号の応答側特徴量の解析結果に基づいて、一定時間経過後に測定側機器1Bと応答側機器2Bとの間の距離を算出する距離算出部15と、距離算出部15の算出結果に基づいて応答側機器2の位置を特定する位置特定部17と、後述する応答側特徴量記憶部22に記憶されている応答側特徴量を記憶する測定側特徴量記憶部16と、を備えている。測定側受信部12a,12bは、装置筐体1の正面1a側において、同じ高さ位置の左右両側に一定の距離L1をあけて配置されている。
【0081】
応答側機器2Bは、測定側機器1Bから送信されてくる測定側特徴量が連続的に変化する発呼信号を受信する応答側受信部21と、応答側受信部21が受信した発呼信号の測定側特徴量に対応して連続的に変化する応答側特徴量を記憶する応答側特徴量記憶部22と、応答側受信部21が発呼信号を受信することにより、応答側特徴量記憶部22に記憶された応答側特徴量に基づいて特徴量が連続的に変化する応答信号を送信する応答側送信部23と、を備えている。また、発呼信号及び応答信号は電磁波または音波である。
【0082】
以下、実施形態2に係る距離検出システムにおける距離及び位置検出処理の具体例について説明する。
【0083】
なお、距離の検出処理については、実施形態2に係る距離検出システムにおいても上記具体例1〜3のいずれかの処理を行うことによって検出できるので、ここでは距離検出についての説明を省略する。ただし、実施形態2に係る距離検出システムでは、測定側機器1Bに2個の測定側受信部12a,12bが設けられているので、応答側機器2Bからの応答信号は、2個の測定側受信部12a,12bのそれぞれで受信される。従って、特徴量解析部13では、受信したそれぞれの応答信号について解析を行うことになり、距離算出部15では、それぞれの解析結果に基づいてそれぞれの距離(2種類の距離)を算出することになる。
【0084】
ここで、測定側機器1Bの測定側受信部12aから応答側機器2Bまでの距離をLx1、測定側機器1Bの測定側受信部12bから応答側機器2Bまでの距離をLx2とすると、測定側順部12a,12b間の距離L1と、距離Lx1,Lx2とによって三角形を作図できるので、距離L1を底辺とする三角形の頂点の位置を求めることによって、応答側機器2Bの横方向(二次元方向)の位置を特定することができる。
【0085】
また、図示は省略しているが測定側受信部1cをさらに1個追加し、筐体1の正面1a側において、これら3個の測定側受信部1a,1b,1cで三角形を形成するように配置すれば、応答側機器2Bの三次元方向の位置を特定することができる。
【0086】
−実施形態3−
図17は、実施形態3に係る距離検出システムの全体構成図である。
【0087】
実施形態3に係る距離検出システムは、距離を測定する測定側機器1Cと、測定側機器1Cの発呼に対して応答する複数個(この例では3個)の応答側機器2C1,2C2,2C3とを備え、測定側機器1Cと各応答側機器2C1,2C2,2C3との間で信号の送受信を行うことにより、測定側機器1Cの発呼に対する各応答側機器2C1,2C2,2C3の応答結果に基づいて、測定側機器1Cが各応答側機器2C1,2C2,2C3との間の距離をそれぞれ検出(算出)する構成となっている。
【0088】
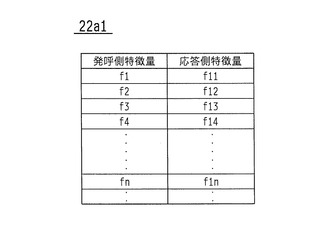
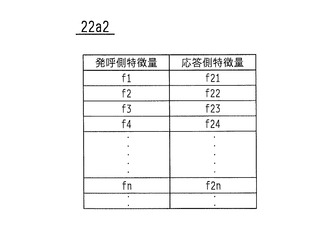
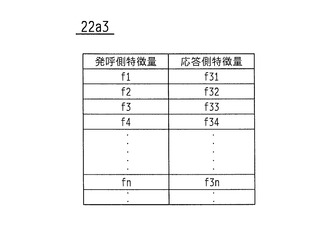
この場合、各応答側機器1C1,2C2,2C3の応答側特徴量記憶部22に記憶されている応答側特徴量を、応答側機器2C1,2C2,2C3ごとに異なる設定としている。実施形態3を例えば具体例1に適用すると、応答側特徴量記憶部22に記憶されている参照テーブル22aを、図18A〜図18Cに示すように設定する。図18Aに示す参照テーブル22a1は、応答側機器2C1の応答側特徴量記憶部22に記憶されている参照テーブルの一例を示しており、図18Bに示す参照テーブル22a2は、応答側機器2C2の応答側特徴量記憶部22に記憶されている参照テーブルの一例を示しており、図18Cに示す参照テーブル22a3は、応答側機器2C3の応答側特徴量記憶部22に記憶されている参照テーブルの一例を示している。ここで、参照テーブル22a1の応答側特徴量のf11〜f1nを例えば低周波数帯域に設定し、参照テーブル22a2の応答側特徴量のf21〜f2nを例えば中周波数帯域に設定し、参照テーブル22a3の応答側特徴量のf31〜f3nを例えば高周波数帯域に設定している。
【0089】
このように、各応答側機器1C1,2C2,2C3から送信される応答信号の周波数帯域を、各応答側機器1C1,2C2,2C3ごとに重複しないように異ならせることで、測定側機器1Cでは、受信する応答信号を図示しないバンドパスフィルタによりフィルタリング処理することで、各応答側機器1C1,2C2,2C3から送信される応答信号を区別して受信することができる。
【0090】
なお、各応答信号を区別して受信した以降の処理は、上記具体例1〜3と同様にして距離の算出を行えばよいので、ここでは各応答側機器1C1,2C2,2C3までの距離の算出(実施形態1)及び位置の特定(実施形態2)についての説明を省略する。
【0091】
また、上記説明では実施形態3を具体例1に適用した場合について説明しているが、他の具体例2,3に適用した場合においても同様であり、振幅の変化量の範囲を重複しないように異なる設定範囲とする、また、振幅の中心からの変化量の変化範囲を重複しないように異なる設定範囲とすることで、各応答側機器1C1,2C2,2C3から送信される応答信号を区別して受信することが可能である。
【0092】
−実施形態4−
実施形態4は、実施形態3の変形例であり、距離検出システムの全体構成は、図17と同じである。
【0093】
図19Aは、実施形態4に係る測定側機器1Cの電気的構成を示す機能ブロック図、図19Bは、実施形態4に係る応答側機器2Cの電気的構成を示す機能ブロック図である。
【0094】
測定側機器1Cは、測定側特徴量が連続的に変化する発呼信号を送信する測定側送信部11と、応答側機器2Cから送信されてくる応答信号を受信する複数個(この例では2個)の測定側受信部12a,12bと、受信した応答信号の応答側特徴量を解析する特徴量解析部13と、発呼信号を送信したタイミングから一定時間を計測するタイマー部14と、応答側機器2Cから受信した応答信号の応答側特徴量の解析結果に基づいて、一定時間経過後に測定側機器1Cと応答側機器2Cとの間の距離を算出する距離算出部15と、距離算出部15の算出結果に基づいて応答側機器2の位置を特定する位置特定部17と、一定時間T1の前後にサンプリングした応答側特徴量を記憶する特徴量記憶バッファ18と、後述する応答側特徴量記憶部22に記憶されている応答側特徴量を記憶する測定側特徴量記憶部16と、を備えており、距離算出部15は、特徴量記憶バッファ18に記憶した応答側特徴量の差分に基づいて各応答側機器を特定する構成としている。応答側特徴量の差分とは、いわゆる信号波形の傾斜を見ることに相当し、この応答信号の傾斜の違いによって応答側機器を区別することができる。なお、測定側受信部12a,12bは、装置筐体1の正面1a側において、同じ高さ位置の左右両側に一定の距離L1をあけて配置されている。
【0095】
応答側機器2Cは、測定側機器1Cから送信されてくる測定側特徴量が連続的に変化する発呼信号を受信する応答側受信部21と、応答側受信部21が受信した発呼信号の測定側特徴量に対応して連続的に変化する応答側特徴量を記憶する応答側特徴量記憶部22と、応答側受信部21が発呼信号を受信することにより、応答側特徴量記憶部22に記憶された応答側特徴量に基づいて特徴量が連続的に変化する応答信号を送信する応答側送信部23と、を備えている。
【0096】
実施形態4において、発呼信号及び応答信号は電磁波または音波である。なお、距離の算出処理や位置の特定処理は、実施形態1や実施形態2で説明した通りであるので、ここでは距離の算出処理や位置の特定処理の説明を省略する。
【0097】
上記構成において、実施形態4では、各応答側機器1C1,2C2,2C3から送信される応答信号を区別するために、各応答側機器1C1,2C2,2C3の応答側特徴量を工夫している。
【0098】
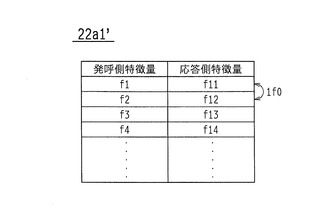
実施形態4を例えば具体例1に適用すると、応答側特徴量記憶部22に記憶されている参照テーブル22aを、図20A〜図20Cに示すように設定する。
【0099】
図20Aに示す参照テーブル22a1′は、応答側機器2C1の応答側特徴量記憶部22に記憶されている参照テーブルの一例を示しており、この参照テーブル22a1′では、発呼側特徴量f1に対して応答側特徴量f11が対応付けられており、発呼側特徴量f2に対して応答側特徴量f12が対応付けられており、発呼側特徴量f3に対して応答側特徴量f13が対応付けられており、発呼側特徴量f4に対して応答側特徴量f14が対応付けられている。ここで、隣接する応答側特徴量の差分(f12−f11,f13−f12,f14−f13,・・・)をΔf0とすると、応答側機器2C1の応答側特徴量の差分はΔf0である。
【0100】
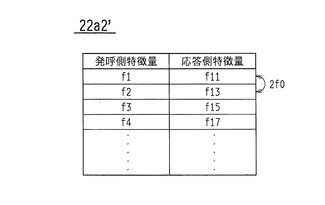
また、図20Bに示す参照テーブル22a2′は、応答側機器2C2の応答側特徴量記憶部22に記憶されている参照テーブルの一例を示しており、この参照テーブル22a2′では、発呼側特徴量f1に対して応答側特徴量f11が対応付けられており、発呼側特徴量f2に対して応答側特徴量f13が対応付けられており、発呼側特徴量f3に対して応答側特徴量f15が対応付けられており、発呼側特徴量f4に対して応答側特徴量f17が対応付けられている。従って、応答側機器2C2の応答側特徴量の差分は2Δf0となる。
【0101】
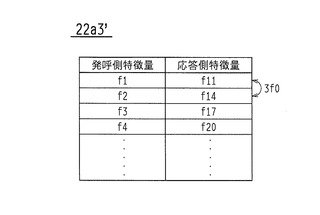
また、図20Cに示す参照テーブル22a3′は、応答側機器2C3の応答側特徴量記憶部22に記憶されている参照テーブルの一例を示しており、この参照テーブル22a3′では、発呼側特徴量f1に対して応答側特徴量f11が対応付けられており、発呼側特徴量f2に対して応答側特徴量f14が対応付けられており、発呼側特徴量f3に対して応答側特徴量f17が対応付けられており、発呼側特徴量f4に対して応答側特徴量f20が対応付けられている。従って、応答側機器2C3の応答側特徴量の差分は3Δf0となる。
【0102】
ここで、応答側特徴量のサンプリング時間は、応答側特徴量が変化していく特定時間Δtaより長い時間(すなわち、サンプリング中に応答側特徴量が必ず1回は変化する時間)とする必要がある。
【0103】
距離算出部15では、受信した応答信号の応答側特徴量の変化に基づいて、上記実施形態1で説明したように、発呼信号を送信してから応答信号を受信するまでの経過時間を算出し、その経過時間からその応答信号に対応する応答側機器までの距離を算出する一方で、特徴量記憶バッファ18に記憶されている応答側特徴量の差分に基づいて、距離を算出した応答側機器がどの機器であるかを特定する。すなわち、特徴量記憶バッファ18に記憶されている応答側特徴量の差分がΔf0である場合には、距離を算出した応答側機器が応答側機器2C1であると特定し、特徴量記憶バッファ18に記憶されている応答側特徴量の差分が2Δf0である場合には、距離を算出した応答側機器が応答側機器2C2であると特定し、特徴量記憶バッファ18に記憶されている応答側特徴量の差分が3Δf0である場合には、距離を算出した応答側機器が応答側機器2C3であると特定することができる。
【0104】
なお、上記各実施形態1〜4では、測定側機器から応答側機器までの算出した距離情報や、特定した位置情報を最終的にどのように利用するのかについては記載していないが、例えば室内に放置された応答側機器(例えば、リモコン)を測定側機器(例えば、テレビジョン受像機)側で探索する場合には、算出した距離情報や特定した位置情報をテレビ画面に表示したり、あるいは音声に変換してスピーカから出力することにより、ユーザに応答側機器の所在を報知することができる。
【0105】
なお、今回開示した実施形態や具体例はすべての点で例示であって、限定的な解釈の根拠となるものではない。従って、本発明の技術的範囲は、上記した実施形態や具体例のみによって解釈されるものではなく、特許請求の範囲の記載に基づいて画定される。また、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれる。
【産業上の利用可能性】
【0106】
本発明の距離検出システムは、テレビジョン受像機とそのリモコン、空気調和機とそのリモコン、オーディオ機器とそのリモコン、画像形成装置とそのリモコン(着脱可能な操作パネル装置)といった、種々の電子機器とそのリモコンとの間の距離検出に利用できるとともに、リモコン以外にも、例えばテレビジョン受像機とオーディオ機器といった電子機器同士の距離検出にも利用できるものである。
【符号の説明】
【0107】
1 装置筐体
1a 正面
1A,1B,1C 測定側機器
2A,2B,2C 応答側機器
11 測定側送信部
12 測定側受信部
13 特徴量解析部
14 タイマー部
15 距離算出部
16 測定側特徴量記憶部
17 位置特定部
18 特徴量記憶バッファ
21 応答側受信部
22 応答側特徴量記憶部
23 応答側送信部
16a,16b,16c 参照テーブル
22a,22b,22c 参照テーブル
【特許請求の範囲】
【請求項1】
測定側機器と応答側機器との間で信号の送受信を行うことにより、前記測定側機器の発呼に対する前記応答側機器の応答結果に基づいて、前記測定側機器が前記応答側機器との間の距離を検出する距離検出システムであって、
前記応答側機器は、
前記測定側機器から送信されてくる測定側特徴量が連続的に変化する発呼信号を受信する応答側受信部と、
前記応答側受信部が受信した前記発呼信号の前記測定側特徴量に対応して連続的に変化する応答側特徴量を記憶する応答側特徴量記憶部と、
前記応答側受信部が前記発呼信号を受信することにより、前記応答側特徴量記憶部に記憶された応答側特徴量に基づいて特徴量が連続的に変化する応答信号を送信する応答側送信部と、を備え、
前記測定側機器は、
前記発呼信号を送信する測定側送信部と、
前記応答側機器から送信されてくる前記応答信号を受信する測定側受信部と、
受信した前記応答信号の前記応答側特徴量を解析する特徴量解析部と、
前記発呼信号を送信したタイミングから一定時間経過後に前記応答側機器から受信した前記応答信号の前記応答側特徴量の解析結果に基づいて、前記測定側機器と前記応答側機器との間の距離を算出する距離算出部と、を備えたことを特徴とする距離検出システム。
【請求項2】
請求項1に記載の距離検出システムであって、
前記発呼信号及び前記応答信号が電磁波または音波であることを特徴とする距離検出システム。
【請求項3】
請求項2に記載の距離検出システムであって、
前記測定側特徴量及び前記応答側特徴量の連続的な変化が周波数の変化であることを特徴とする距離検出システム。
【請求項4】
請求項2に記載の距離検出システムであって、
前記測定側特徴量及び前記応答側特徴量の連続的な変化が振幅の変化であることを特徴とする距離検出システム。
【請求項5】
請求項2に記載の距離検出システムであって、
前記測定側特徴量及び前記応答側特徴量の連続的な変化が振幅の中心からの変化量であることを特徴とする距離検出システム。
【請求項6】
請求項1から請求項5までのいずれか1項に記載の距離検出システムであって、
前記測定側機器は、前記応答側特徴量記憶部に記憶されている応答側特徴量を記憶する測定側特徴量記憶部を備え、
前記特徴量解析部は、前記発呼信号を送信したタイミングから一定時間経過後に前記応答側機器から受信した前記応答信号の応答側特徴量と前記測定側特徴量記憶部に記憶されている応答側特徴量とを照合することによって特徴量の解析を行うことを特徴とする距離検出システム。
【請求項7】
請求項1から請求項6までのいずれか1項に記載の距離検出システムであって、
前記測定側機器は、前記測定側受信部を複数備えるとともに、前記応答側機器の位置を特定する位置特定部を備え、
前記特徴量解析部は、前記複数の測定側受信部で受信した前記複数の応答信号ごとに応答側特徴量を解析し、
前記距離算出部は、前記複数の応答信号ごとの前記応答側特徴量の解析結果に基づいて、前記複数の測定側受信部と前記応答側機器との間の距離をそれぞれ算出し、
前記位置特定部は、前記算出結果に基づいて前記応答側機器の位置を特定することを特徴とする距離検出システム。
【請求項8】
請求項1から請求項7までのいずれか1項に記載の距離検出システムであって、
前記応答側機器を複数備え、
前記応答側機器の前記応答側特徴量記憶部に記憶されている応答側特徴量が前記応答側機器ごとに異なる設定とされていることを特徴とする距離検出システム。
【請求項9】
請求項8に記載の距離検出システムであって、
前記一定時間の前後にサンプリングした応答側特徴量を記憶する特徴量記憶バッファを備え、
前記距離算出部は、前記特徴量記憶バッファに記憶した応答側特徴量の差分に基づいて前記応答側機器を特定することを特徴とする距離検出システム。
【請求項10】
請求項1から請求項9までのいずれか1項に記載の距離検出システムであって、
前記測定側機器は、前記発呼信号を送信したタイミングから前記一定時間より短い所定時間の間はサンプリングを行わない、または、計測結果をマスクすることを特徴とする距離検出システム。
【請求項11】
請求項1から請求項10までのいずれか1項に記載の距離検出システムであって、
前記測定側機器が画像形成装置本体であり、前記応答側機器が前記画像形成装置本体から着脱自在な操作パネル装置であることを特徴とする距離検出システム。
【請求項1】
測定側機器と応答側機器との間で信号の送受信を行うことにより、前記測定側機器の発呼に対する前記応答側機器の応答結果に基づいて、前記測定側機器が前記応答側機器との間の距離を検出する距離検出システムであって、
前記応答側機器は、
前記測定側機器から送信されてくる測定側特徴量が連続的に変化する発呼信号を受信する応答側受信部と、
前記応答側受信部が受信した前記発呼信号の前記測定側特徴量に対応して連続的に変化する応答側特徴量を記憶する応答側特徴量記憶部と、
前記応答側受信部が前記発呼信号を受信することにより、前記応答側特徴量記憶部に記憶された応答側特徴量に基づいて特徴量が連続的に変化する応答信号を送信する応答側送信部と、を備え、
前記測定側機器は、
前記発呼信号を送信する測定側送信部と、
前記応答側機器から送信されてくる前記応答信号を受信する測定側受信部と、
受信した前記応答信号の前記応答側特徴量を解析する特徴量解析部と、
前記発呼信号を送信したタイミングから一定時間経過後に前記応答側機器から受信した前記応答信号の前記応答側特徴量の解析結果に基づいて、前記測定側機器と前記応答側機器との間の距離を算出する距離算出部と、を備えたことを特徴とする距離検出システム。
【請求項2】
請求項1に記載の距離検出システムであって、
前記発呼信号及び前記応答信号が電磁波または音波であることを特徴とする距離検出システム。
【請求項3】
請求項2に記載の距離検出システムであって、
前記測定側特徴量及び前記応答側特徴量の連続的な変化が周波数の変化であることを特徴とする距離検出システム。
【請求項4】
請求項2に記載の距離検出システムであって、
前記測定側特徴量及び前記応答側特徴量の連続的な変化が振幅の変化であることを特徴とする距離検出システム。
【請求項5】
請求項2に記載の距離検出システムであって、
前記測定側特徴量及び前記応答側特徴量の連続的な変化が振幅の中心からの変化量であることを特徴とする距離検出システム。
【請求項6】
請求項1から請求項5までのいずれか1項に記載の距離検出システムであって、
前記測定側機器は、前記応答側特徴量記憶部に記憶されている応答側特徴量を記憶する測定側特徴量記憶部を備え、
前記特徴量解析部は、前記発呼信号を送信したタイミングから一定時間経過後に前記応答側機器から受信した前記応答信号の応答側特徴量と前記測定側特徴量記憶部に記憶されている応答側特徴量とを照合することによって特徴量の解析を行うことを特徴とする距離検出システム。
【請求項7】
請求項1から請求項6までのいずれか1項に記載の距離検出システムであって、
前記測定側機器は、前記測定側受信部を複数備えるとともに、前記応答側機器の位置を特定する位置特定部を備え、
前記特徴量解析部は、前記複数の測定側受信部で受信した前記複数の応答信号ごとに応答側特徴量を解析し、
前記距離算出部は、前記複数の応答信号ごとの前記応答側特徴量の解析結果に基づいて、前記複数の測定側受信部と前記応答側機器との間の距離をそれぞれ算出し、
前記位置特定部は、前記算出結果に基づいて前記応答側機器の位置を特定することを特徴とする距離検出システム。
【請求項8】
請求項1から請求項7までのいずれか1項に記載の距離検出システムであって、
前記応答側機器を複数備え、
前記応答側機器の前記応答側特徴量記憶部に記憶されている応答側特徴量が前記応答側機器ごとに異なる設定とされていることを特徴とする距離検出システム。
【請求項9】
請求項8に記載の距離検出システムであって、
前記一定時間の前後にサンプリングした応答側特徴量を記憶する特徴量記憶バッファを備え、
前記距離算出部は、前記特徴量記憶バッファに記憶した応答側特徴量の差分に基づいて前記応答側機器を特定することを特徴とする距離検出システム。
【請求項10】
請求項1から請求項9までのいずれか1項に記載の距離検出システムであって、
前記測定側機器は、前記発呼信号を送信したタイミングから前記一定時間より短い所定時間の間はサンプリングを行わない、または、計測結果をマスクすることを特徴とする距離検出システム。
【請求項11】
請求項1から請求項10までのいずれか1項に記載の距離検出システムであって、
前記測定側機器が画像形成装置本体であり、前記応答側機器が前記画像形成装置本体から着脱自在な操作パネル装置であることを特徴とする距離検出システム。
【図1】


【図2A】
【図2B】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16A】
【図16B】
【図17】
【図18A】
【図18B】
【図18C】
【図19A】
【図19B】
【図20A】
【図20B】
【図20C】
【図2A】
【図2B】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16A】
【図16B】
【図17】
【図18A】
【図18B】
【図18C】
【図19A】
【図19B】
【図20A】
【図20B】
【図20C】
【公開番号】特開2013−53867(P2013−53867A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2011−190579(P2011−190579)
【出願日】平成23年9月1日(2011.9.1)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成23年9月1日(2011.9.1)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
[ Back to top ]