
距離測定装置、距離測定方法、距離測定プログラム、およびコンピュータ読み取り可能な記録媒体
【課題】ワーク表面に発生したプローブの二次像とプローブの先端部との位置関係から、プローブの先端部とワーク表面との距離を測定する距離測定装置を提供する。
【解決手段】LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる二次像とプローブ6とを撮像した画像において、プローブ6のエッジを特定するエッジ特定部101と、二次像の外縁に沿った直線を画像上に挿入する直線挿入部102と、上記エッジと上記直線との重なりを判定する重なり判定部103と、を備え、1以上のLEDランプ7、撮像装置、及びプローブ6が、ワーク9の表面に対して一体に移動可能に保持されている。それゆえ、距離測定装置100は、ワーク9の表面に発生したプローブ6の二次像とプローブ6のエッジとの位置関係から、プローブ6のエッジとワーク9の表面との距離を測定することができる。
【解決手段】LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる二次像とプローブ6とを撮像した画像において、プローブ6のエッジを特定するエッジ特定部101と、二次像の外縁に沿った直線を画像上に挿入する直線挿入部102と、上記エッジと上記直線との重なりを判定する重なり判定部103と、を備え、1以上のLEDランプ7、撮像装置、及びプローブ6が、ワーク9の表面に対して一体に移動可能に保持されている。それゆえ、距離測定装置100は、ワーク9の表面に発生したプローブ6の二次像とプローブ6のエッジとの位置関係から、プローブ6のエッジとワーク9の表面との距離を測定することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、プローブの二次像をワーク表面に発生させて、その二次像とプローブの先端部との位置関係から、プローブの先端部とワーク表面との距離を測定することが可能な距離測定装置、距離測定方法、距離測定プログラム、およびコンピュータ読み取り可能な記録媒体に関する。
【背景技術】
【0002】
従来から、画像処理装置を搭載し、ワークの位置補正をしながら塗布作業を行うディスペンサーや、分析試料に点在する化合物群の分布状態を拡大して検出する顕微鏡などの装置が知られている。
【0003】
これらの装置では、例えば流動性試料をワーク表面に塗布するときに流動性試料の塗布位置や塗布量をコントロールする必要があるため、プローブの先端部とワーク表面との距離を正確に制御する必要がある。
【0004】
特許文献1に記載の試料採取システムは、後続の分析のために表面アレイのうちの少なくとも1つの点から試料を得ることを目的としており、プローブと表面アレイと間の距離を制御するために画像分析手法を用いている。
【0005】
より具体的には、当該試料採取システムは、光源、カメラ、および、画像処理装置を備える。光源は、プローブの先端部に隣接して配置されており、プローブの先端部の影が表面アレイに落ちるよう、プローブの先端部に向かって光のビームを照射する。カメラは、プローブの先端部の画像、および、光源からプローブに光を照射することによって表面アレイに現れる影の像を取得するために設けられている。画像処理装置は、カメラが取り込んだ画像に対してライン平均輝度技術(LAB(average line brightness))を適用し、プローブの先端と表面アレイとの間の実際の距離を決定する。
【0006】
すなわち、当該試料採取システムでは、光源がプローブに向かって光ビームを照射し、カメラは、プローブの先端部と表面アレイの連続的な画像、より具体的には、表面アレイ上に落とされるプローブの先端部の影を取り込む。そして、画像処理装置は、取り込んだ影の画像を輝度によって二値化する。このとき、プローブの先端部および表面アレイを示すLABが最も低い輝度となるため、画像処理装置は、その最も低いLABである2つの水平ライン間の距離をプローブの先端部および表面アレイの間の距離として測定する。そして、当該試料採取システムは、測定した上記距離に基づき、表面アレイを載置するステージを移動してプローブの先端部と表面アレイとの距離を制御している。
【0007】
特許文献2に記載の分画装置は、サンプルプレートへの液滴の滴下の際にサンプルプレートとプローブの先端部との距離を一定に保つために、プローブとサンプルプレートとの距離を測定するための近接センサーをプローブの側方に備えている。そのサンプルプレートは、ステージに搭載されて上下水平方向に移動する。ステージは、制御装置に接続され、その制御装置がステージの移動を制御する。制御装置は、近接センサーの測定値が設定された値となるようにステージをフィードバック制御し、プローブから液滴を滴下する際にサンプルプレートを上方に移動させて、プローブとサンプルプレートとの距離を接近させ、液滴をサンプルプレートに接触させて分画を行っている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2008−542752号公報(2008年11月27日公開)
【特許文献2】特開2005− 98766号公報(2005年 4月14日公開)
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1、2に記載の技術では以下の問題が生じる。
【0010】
特許文献1に記載の試料採取システムでは、プローブの先端部と表面アレイとの間の距離を測定するためにプローブの影を利用しており、この点は後述する本願発明に係る距離測定装置と共通する。
【0011】
しかしながら、当該試料採取システムは、ライン平均輝度(LAB)技術を利用してプローブと表面アレイとの間の距離を測定するため、表面アレイに生じるプローブの影の幅を可能な限り細くする必要がある。これを可能にするためには、プローブに対するカメラの角度を可能な限り大きくする必要がある。一方、このようにカメラ角度を大きくすると、表面での変化を観察することが難しくなる。特に、小さな点の状態で試料を塗布する場合には、観察する点の面積が限りなく小さくなり、像倍率が小さい場合には点の存在すら掴めなくなることもある。
【0012】
このように、LAB技術を利用した画像分析方法では、プローブに対するカメラ角度の設定が極めて重要である。それに対して、特許文献1は、プローブに対してカメラの角度をどのように設定するかについて何ら言及していない。また、特許文献1に記載の試料採取システムは、先端の外径が635μmのプローブを使用しており(明細書の段落〔0044〕参照)、そのように太い先端径のプローブを使用して、表面アレイに生じるプローブの影の幅を可能な限り小さくすることも困難である。加えて、このように太い外径のプローブでは、プローブの先端部に近接するほどカメラによる影の撮像が困難になる。それゆえ、当業者にとって、特許文献1に開示の技術を用いて、どのように特許文献1に記載の課題を解決するか定かではない。
【0013】
さらに、LAB技術に特有の問題もある。すなわち、特許文献1に記載の試料採取システムは、プローブの先端に現れる影を利用してプローブの先端部と表面アレイとの間の距離を測定するものである。しかしながら、ワーク表面の種類によっては、図23に示すように、プローブの先端部分において鏡面現象が発生してしまう。また、ワーク表面が白い場合には、先端部が白くなってしまい、プローブの先端に影が出なくなることもある。同様に、ワーク表面の状態(材質(シリコン・ガラスなど)、色、面粗さ等)や、プローブに対する光源の位置・角度によっては、ワーク表面にプローブの影を発生させることができない。従って、特許文献1の試料採取システムは、LAB技術を利用するがゆえに、ワーク表面の状態(材質、色、面粗さ等)、プローブに対する光源の位置・角度などの制約を受けるという問題がある。
【0014】
さらに、当該試料採取システムは、プローブの先端部と表面アレイとの距離を制御するために表面アレイを載置するステージを移動している。つまり、当該試料採取システムは、ステージに対してプローブが移動する方法を採用するものではない。従って、そのワークエリアは必然的に小さくなり、かつ、ワークエリア表面に傾きが存在する場合には、プローブの先端部と表面アレイとの間の距離を制御することは困難になる。それゆえ、特許文献1に記載の試料採取システムは、大型液晶装置などのワークエリアの大きな装置に対する塗布作業に使用することができない。
【0015】
このように、特許文献1に記載の試料採取システムは、上記種々の問題点を有していることから、ユーザにとって利用性の高いシステムではなかった。
【0016】
一方、特許文献2に記載の試料採取システムは、プローブの先端部と表面アレイとの間の距離を近接センサーによって制御するものである。従って、二次像を利用して上記距離を制御する本願発明に係る距離測定装置とは、そもそも距離の測定方法が異なる。
【0017】
また、近接センサーによってプローブの先端部と表面アレイとの間の距離を測定する場合、測定前の段階で、プローブの先端部と表面アレイとの距離の関係を前もって割り出しておく必要があり、ユーザに手間を強いるものであった。また、ワーク表面が必ずしも水平に支持されているとは限らないため、ある1点の位置で測定した距離が他の位置においても適用されるとは限らず、測定結果の安定性に欠けるものであった。
【0018】
なお、特許文献2に記載の試料採取システムは、プローブとサンプルプレートとの距離を接近させるために、サンプルプレートを上方に移動させるという方法を採用している。また、プローブの先端とサンプルプレートとの間の距離は0.6mmと記載されている(明細書の段落〔0012〕)。このような特許文献2の開示内容に基づけば、また、特許文献2には近接センサーの取付位置等についての詳細な説明が開示されていないことに鑑みれば、当該試料採取システムは、プローブの先端部とサンプルプレートとの間の距離を十数μオーダーにまで接近させることを意図するものではなく、またそのように設計されたものとも言えない。
【0019】
本発明は、上記の問題点に鑑みてなされたものであり、その目的は、ワーク表面に発生したプローブの二次像とプローブの先端部との位置関係から、プローブの先端部とワーク表面との距離を測定する距離測定装置、距離測定装置方法、距離測定プログラム、及びコンピュータ読み取り可能な記録媒体を提供することにある。
【課題を解決するための手段】
【0020】
本発明に係る距離測定装置は、上記の課題を解決するために、
光源からプローブに光を照射することによってワーク表面に現れる二次像と上記プローブとを撮像装置によって撮像し、その撮像装置が撮像した画像を用いて上記プローブの先端部と上記ワーク表面との距離を測定する距離測定装置において、
上記画像における上記先端部を特定する特定手段と、
上記画像における上記二次像の外縁に沿った直線を上記画像上に挿入する挿入手段と、
上記特定手段が特定した上記先端部と上記挿入手段が挿入した上記直線との重なりを判定する判定手段と、を備え、
1以上の上記光源、上記撮像装置、及び上記プローブが、上記ワーク表面に対して一体に移動可能に保持されていることを特徴としている。
【0021】
また、本発明に係る距離測定方法は、上記の課題を解決するために、
光源からプローブに光を照射することによってワーク表面に現れる二次像と上記プローブとを撮像装置によって撮像し、その撮像装置が撮像した画像を用いて上記プローブの先端部と上記ワーク表面との距離を測定する距離測定方法であって、
上記画像における上記先端部を特定する特定ステップと、
上記画像における上記二次像の外縁に沿った直線を上記画像上に挿入する挿入ステップと、
上記特定ステップにて特定された上記先端部と上記挿入ステップにて挿入された上記直線との重なりを判定する判定ステップと、を含むことを特徴としている。
【0022】
上記構成によれば、特定手段(特定ステップ)は、撮像装置が撮像したワーク表面に現れるプローブの二次像とプローブとの画像において、プローブの先端部を特定する。また挿入手段は、その画像において、上記二次像の外縁に沿った直線を挿入する。そして、判定手段は、特定手段(特定ステップ)が特定した上記先端部と挿入手段が挿入した上記直線との重なりを判定する。
【0023】
つまり、本発明に係る距離測定装置(距離測定方法)は、プローブとワーク表面とが接近するほど、上記画像上において、上記先端部と上記二次像の外縁に沿って挿入された上記直線とが近づき、プローブとワーク表面とが接触したときに、上記画像上において、上記先端部と上記直線とが重なる性質を利用するものである。従って、判定手段が上記先端部と上記直線とが重なったと判定することにより、プローブとワーク表面との接触を確認することができる。
【0024】
それゆえ、本発明に係る距離測定装置(距離測定方法)は、上記先端部と上記直線とが重なった時点でプローブとワーク表面とが接触したものと捉え、その点を基準に、プローブの移動量および移動方向に基づき、上記先端部と上記ワーク表面との距離を測定することができる。
【0025】
また、本発明に係る距離測定装置(距離測定方法)は、上述したように、上記プローブの二次像をワーク表面に発生させて、特定手段(特定ステップ)が特定した上記先端部と上記二次像の外縁に沿って挿入された上記直線との位置関係から、上記先端部と上記ワーク表面との距離を測定するものである。
【0026】
それゆえ、本発明に係る距離測定装置(距離測定方法)は、LAB技術を利用した画像分析方法とは異なり、プローブの径の大小に左右されることなく上記先端部と上記ワーク表面との距離を測定することができる。
【0027】
さらに、本発明に係る距離測定装置では、1以上の上記光源、上記撮像装置、及び上記プローブが、上記ワーク表面に対して一体に移動可能に保持された構成である。
【0028】
これにより、1以上の上記光源、上記撮像装置、及び上記プローブの位置関係は固定された状態で維持されるため、撮像する画像内において、プローブの位置が測定ごとに移動し、それにより測定結果にばらつきが生じる事態も回避でき、より安定した測定結果をユーザに提供することができる。しかも、その測定方法ゆえに、ワーク表面の形状が安定していない場合(例えばワーク表面に傾斜が存在する場合)においても、上記先端部と上記ワーク表面との距離を測定することができる。
【0029】
加えて、1以上の上記光源、上記撮像装置、及び上記プローブが、上記ワーク表面に対して一体に移動可能に保持されているため、本発明に係る距離測定装置(距離測定方法)では、ワーク表面に対する作業領域の制限がなくなり、巨大なワーク表面への対応も可能となる。つまり、従来の試料塗布装置では、ワーク表面の側が移動可能に制御されていたため、ワーク表面の形状等によっては、同じワーク表面に対して複数のプローブを利用して複数の試料を塗布することは困難であった。これに対して、本発明に係る距離測定装置を試料塗布装置に適用した場合には、同じワーク表面に対して短時間に複数の異なる試料の塗布が可能となる。それゆえ、本発明に係る距離測定装置(距離測定方法)を利用することにより、著しい生産性の向上をユーザにもたらすことができる。
【0030】
さらに、本発明に係る距離測定装置では、
上記特定手段が特定した上記先端部から上記挿入手段が挿入した上記直線までの距離に基づいて、上記先端部と上記ワーク表面との距離を算出する算出手段を備えることが好ましい。
【0031】
上述したように、本発明に係る距離測定装置では、特定手段が、撮像装置が撮像したワーク表面に現れるプローブの二次像とプローブとの画像において、プローブの先端部を特定する。また挿入手段が、当該画像において、上記二次像の外縁に沿った直線を挿入する。そして、さらに、本発明に係る距離測定装置では、算出手段が、上記特定手段が特定した上記先端部から上記挿入手段が挿入した上記直線までの距離に基づいて、上記先端部と上記ワーク表面との距離を算出する。
【0032】
具体的には、例えば、上記先端部とワーク表面との実際の距離と、上記先端部から上記挿入手段が挿入した上記直線までの距離との相関関係を予め準備しておくことにより、算出手段は、上記先端部から上記直線までの距離に基づいて、上記先端部と上記ワーク表面との距離を算出することができる。これにより、上記先端部と上記ワーク表面との距離が自動的に算出される構成を実現することができる。
【0033】
なお、ここでいう上記先端部から上記直線までの距離とは、上記先端部を通り、画像内のプローブの長手方向に延びた直線と上記挿入手段が挿入した直線との交点と上記先端部との間の距離をいう。
【0034】
さらに、本発明に係る距離測定装置では、
上記二次像は、上記プローブの影または上記プローブの反射像であることが好ましい。
【0035】
上記構成によれば、本発明に係る距離測定装置では、上記二次像が上記プローブの影または上記プローブの反射像の何れであっても対応可能である。すなわち、ワーク表面の材質等によって、プローブの影ではなくプローブの反射像が発生した場合においても、本発明に係る距離測定装置は、上記先端部と上記ワーク表面との距離を測定することができる。
【0036】
さらに、本発明に係る距離測定装置では、
上記光源は、複数存在することが好ましい。
【0037】
上記構成によれば、本発明に係る距離測定装置では、プローブに光を照射する光源が複数存在する。これにより、プローブに対して複数の方向から光が照射されるため、撮像装置は、プローブの先端部の形状を鮮明に撮像することができる。この結果、本発明に係る距離測定装置は、プローブの先端部とワーク表面との距離をより正確に測定することができる。
【0038】
なお、プローブに対して複数の方向から光を照射することにより、反射像がより鮮明にワーク表面に発生するという特性からも、上記構成は有効であることが分かる。
【0039】
さらに、本発明に係る距離測定装置では、
上記光源は、平面視で、上記撮像装置の撮像方向に対して前記プローブの中心を通って直交する軸から、上記撮像装置の側およびその反対側に対して45°の範囲内にある領域において配置されていることが好ましい。
【0040】
さらに、本発明に係る距離測定装置では、
上記光源は、平面視で、上記撮像装置の撮像方向に対して前記プローブの中心を通って直交する軸から、上記撮像装置の側に対して、30°から60°の範囲内にある領域において配置されていることが好ましい。
【0041】
上記構成により、撮像装置は、ワーク表面に発生するプローブの二次像をより鮮明に撮像することができ、プローブの先端部とワーク表面との距離をより正確に測定することができる。
【0042】
さらに、本発明に係る距離測定装置では、
上記撮像装置は、その撮像方向が上記プローブに対して40°から80°、好ましくは50°から65°の範囲内にある領域において配置されていることが好ましい。
【0043】
上記構成により、ワーク表面に発生するプローブの二次像をより鮮明に撮像することができ、プローブの先端部とワーク表面との距離をより正確に測定することができる。
【0044】
なお、上記距離測定装置は、コンピュータによって実現してもよく、この場合には、コンピュータを上記各手段として動作させることにより上記距離測定装置をコンピュータにて実現させる距離測定プログラム、およびそれを記録したコンピュータ読み取り可能な記録媒体も、本発明の範疇に入る。
【発明の効果】
【0045】
本発明に係る距離測定装置は、以上のように、上記画像における上記先端部を特定する特定手段と、上記画像における上記二次像の外縁に沿った直線を上記画像上に挿入する挿入手段と、上記特定手段が特定した上記先端部から上記挿入手段が挿入した上記直線までの距離に基づいて、上記先端部と上記ワーク表面との距離を算出する算出手段と、を備え、1以上の上記光源、上記撮像装置、及び上記プローブが、上記ワーク表面に対して一体に移動可能に保持されている構成である。
【0046】
また、本発明に係る距離測定方法は、以上のように、上記画像における上記先端部を特定する特定ステップと、上記画像における上記二次像の外縁に沿った直線を上記画像上に挿入する挿入ステップと、上記特定ステップにて特定された上記先端部と上記挿入ステップにて挿入された上記直線との重なりを判定する判定ステップと、を含む構成である。
【0047】
それゆえ、ワーク表面に発生したプローブの二次像とプローブの先端部との位置関係から、プローブの先端部とワーク表面との距離を測定することが可能になるという効果を奏する。
【図面の簡単な説明】
【0048】
【図1】本発明に係る距離算出装置の概略構成を示すブロック図である。
【図2】本発明に係る距離測定装置が組み込まれた試料塗布装置の概略構成を示す図である。
【図3】直線挿入部による直線挿入例を示す図であり、プローブのエッジとワークの表面との間の距離が0μmの状態において、第1〜第3直線が挿入された様子を示す画像である。
【図4】直線挿入部による直線挿入例を示す図であり、プローブのエッジとワークの表面との間の距離が50μmの状態において、第1〜第3直線が挿入された様子を示す画像である。
【図5】直線挿入部による直線挿入例を示す図であり、プローブのエッジとワークの表面との間の距離が100μmの状態において、第1〜第3直線が挿入された様子を示す画像である。
【図6】プローブのエッジとワークの表面との間の距離が100μmの状態において、第1〜第3直線が挿入された様子を示す図であり、LEDランプを2個使用して、2つの影が現れた場合の例を示す画像である。
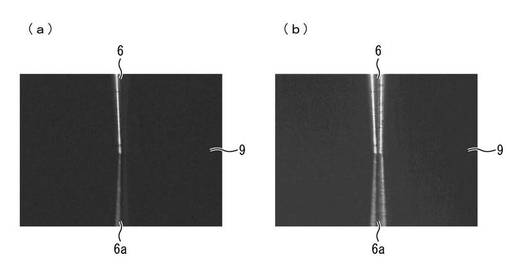
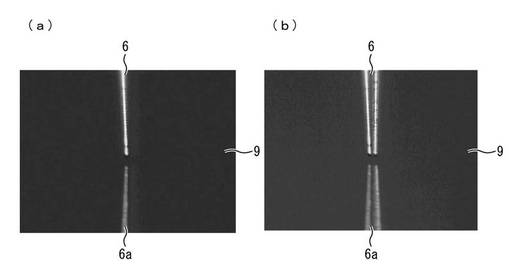
【図7】シリコン製のワークの表面にプローブの反射像が発生した場合において、プローブのエッジとワークの表面との距離が0μmの場合を示す画像であり、(a)は、1つのLEDランプを使用した場合を、(b)は、複数個のLEDランプを使用した場合を示す画像である。
【図8】シリコン製のワークの表面にプローブの反射像が発生した場合において、プローブのエッジとワークの表面との距離が50μmの場合を示す画像であり、(a)は、1つのLEDランプを使用した場合を、(b)は、複数個のLEDランプを使用した場合を示す画像である。
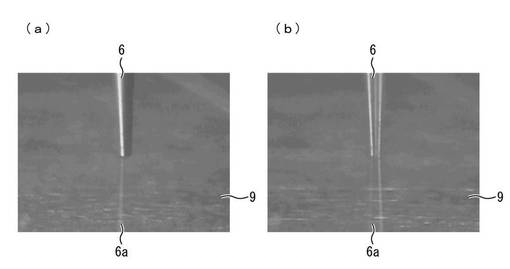
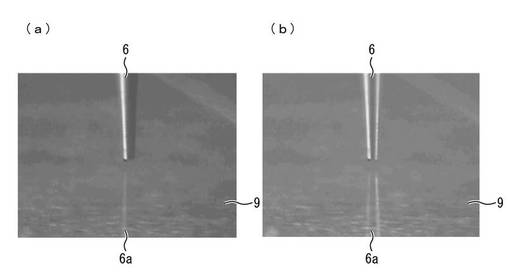
【図9】ITOプレートの表面にプローブ6の反射像が発生した場合において、プローブ6のエッジとITOプレートの表面との距離が0μmの場合を示す画像であり、 (a)は、1つのLEDランプを使用した場合を、(b)は、複数個のLEDランプを使用した場合を示す画像である。
【図10】ITOプレートの表面にプローブ6の反射像が発生した場合において、プローブ6のエッジとITOプレートの表面との距離が50μmの場合を示す画像であり、 (a)は、1つのLEDランプを使用した場合を、(b)は、複数個のLEDランプを使用した場合を示す画像である。
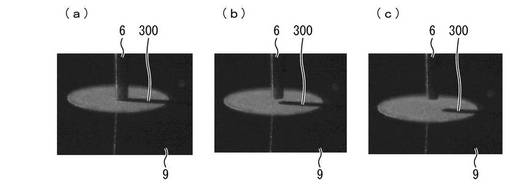
【図11】プローブに対するCCDカメラの撮像方向の角度を75°に設定したときに、CCDカメラが撮像したワークの表面に現れる影とプローブとを撮像した画像であり、(a)〜(c)はそれぞれ、プローブのエッジとワークの表面との間の距離を0μm、50μm、100μmとしたときの画像である。
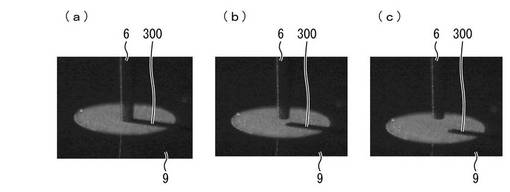
【図12】プローブに対するCCDカメラの撮像方向の角度を70°に設定したときに、CCDカメラが撮像したワークの表面に現れる影とプローブとを撮像した画像であり、(a)〜(c)はそれぞれ、プローブのエッジとワークの表面との間の距離を0μm、50μm、100μmとしたときの画像である。
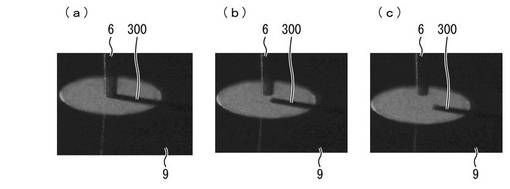
【図13】プローブに対するCCDカメラの撮像方向の角度を60°に設定したときに、CCDカメラが撮像したワークの表面に現れる影とプローブとを撮像した画像であり、(a)〜(c)はそれぞれ、プローブのエッジとワークの表面との間の距離を0μm、50μm、100μmとしたときの画像である。
【図14】プローブに対するCCDカメラの撮像方向の角度を45°に設定したときに、CCDカメラが撮像したワークの表面に現れる影とプローブとを撮像した画像であり、(a)〜(c)はそれぞれ、プローブのエッジとワークの表面との間の距離を0μm、50μm、100μmとしたときの画像である。
【図15】プローブに対するCCDカメラの撮像方向の角度を75°に設定したときの試料塗布装置の様子を示す画像である。
【図16】プローブに対するCCDカメラの撮像方向の角度を60°に設定したときの試料塗布装置の様子を示す画像である。
【図17】プローブに対するCCDカメラの撮像方向の角度を45°に設定したときの試料塗布装置の様子を示す画像である。
【図18】プローブ6対するCCDカメラの撮像方向の角度を75°に設定したときに、CCDカメラが撮像したワークの表面に現れる影とプローブとを撮像した画像であり、(a)〜(e)はそれぞれ、プローブ6の中心に向かって照射するLEDランプ7の照射方向を、CCDカメラ3の撮像方向に対して平面視で左側に約110°回転させた方向、左側に約25°回転させた方向、右側に約30°回転させた方向、右側に約75°回転させた方向、左側に約60°回転させた方向に設定したときの画像である。
【図19】プローブ6対するCCDカメラの撮像方向の角度を60°に設定したときに、CCDカメラが撮像したワークの表面に現れる影とプローブとを撮像した画像であり、(a)〜(e)はそれぞれ、プローブ6の中心に向かって照射するLEDランプ7の照射方向を、CCDカメラ3の撮像方向に対して平面視で左側に約130°回転させた方向、左側に約25°回転させた方向、右側に約25°回転させた方向、右側に約80°回転させた方向、左側に約60°回転させた方向に設定したときの画像である。
【図20】プローブ6対するCCDカメラの撮像方向の角度を45°に設定したときに、CCDカメラが撮像したワークの表面に現れる影とプローブとを撮像した画像であり、(a)〜(e)はそれぞれ、プローブ6の中心に向かって照射するLEDランプ7の照射方向を、CCDカメラ3の撮像方向に対して平面視で左側に約130°回転させた方向、左側に約25°回転させた方向、右側に約25°回転させた方向、右側に約80°回転させた方向、左側に約60°回転させた方向に設定したときの画像である。
【図21】本発明に係る距離測定装置が組み込まれた切削装置の概略構成を示す図である。
【図22】プローブをフッ素系材料によりコーティングすることにより、先端部での鏡面現象が防止されることを示すための画像である。
【図23】プローブの先端部分において鏡面現象が発生する様子を示す画像である。
【発明を実施するための形態】
【0049】
以下、本発明の一実施の形態について、図面を参照しながら説明する。説明の便宜上、図面に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
【0050】
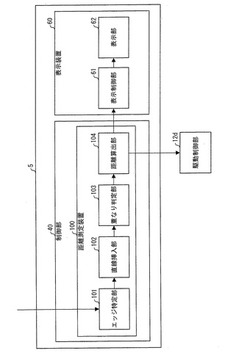
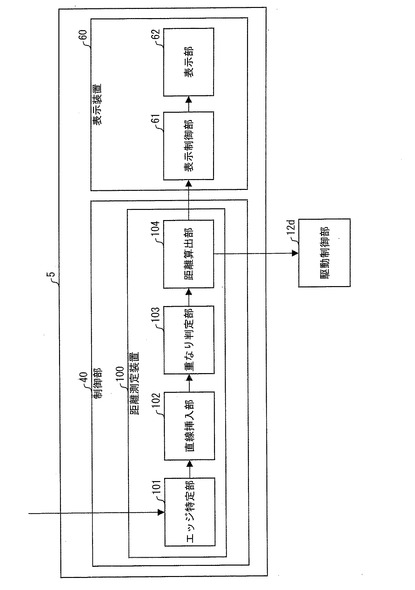
なお、本発明に係る距離測定装置100を概略的に説明すれば以下のとおりである。すなわち、図1および図2を参照すると、距離測定装置100は、LEDランプ(光源)7からプローブ6に光を照射することによりワーク9の表面に現れる二次像とプローブ6とを撮像した画像において、プローブ6のエッジを特定するエッジ特定部(特定手段)101と、上記画像における二次像の外縁に沿った直線を上記画像上に挿入する直線挿入部(挿入手段)102と、エッジ特定部101が特定した上記エッジと直線挿入部102が挿入した上記直線との重なりを判定する重なり判定部(判定手段)103と、を備え、1以上のLEDランプ7、CCDカメラ3、及びプローブ6は、ワーク9の表面に対して一体に移動可能に保持されている構成である。
【0051】
これにより、距離測定装置100は、ワーク9の表面に発生したプローブ6の二次像とプローブ6の先端部との位置関係から、プローブ6の先端部とワーク9の表面との距離を測定することができる。
【0052】
以下、距離測定装置100の構成、及び距離測定装置100を備えた試料塗布装置50の構成について説明する。なお、説明の便宜のため、試料塗布装置50の構成から説明する。
【0053】
〔試料塗布装置50の構成〕
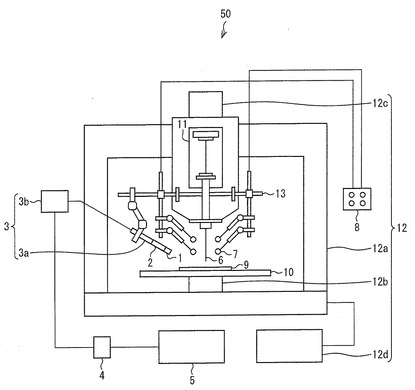
図2は、試料塗布装置50の概略構成を示す図である。
【0054】
同図に示すとおり、試料塗布装置50は、レンズ1と、エクステンションチューブ2と、CCDカメラ3と、USBビデオキャプチャー4と、パソコン5と、プローブ6と、LEDランプ7と、LED用照明電源8と、ワーク9と、ワーク用ステージ10と、微量塗布装置11と、移動装置12と、保持部13とを含む構成である。
【0055】
レンズ1は、LEDランプ7からプローブ6に光を照射することによってワーク9の表面に現れる二次像(影あるいは反射像)とプローブ6とをCCDカメラ3の被写体として結像し、CCDカメラ3に当該被写体を撮像させるものである。本実施形態では、レンズ1は、株式会社エルモ社製のスーパー・マイクロカメラレンズQT3515を使用している。スーパー・マイクロカメラレンズQT3515は、焦点距離f=15mm、最大口径比 1:3.5であり、さらに、画角が9°以下である。従って、当該レンズは、撮影対象物をピンポイントで、つまり、撮像対象として狙った箇所付近のみが表示装置60に映し出されるように、撮影対象物を捕捉できることを特徴としている。
【0056】
エクステンションチューブ2は、レンズ1が取り込んだ被写体の像を拡大するために設けられるものであり、レンズ1とCCDカメラ3の間に2〜4個取り付けられている。エクステンションチューブ2は、2個取り付けることにより25〜30倍に、3個取り付けることにより50〜60倍に、4個取り付けることにより100〜120倍に、被写体の像を拡大する効果を有する。
【0057】
CCDカメラ3は、レンズ1およびエクステンションチューブ2を介して、LEDランプ7からプローブ6に光を照射することによってワーク9の表面に現れる二次像(影あるいは反射像)とプローブ6とを撮像するものであり、カメラ本体3aとカメラアンプ3bとを含む。本実施形態では、CCDカメラ3として、株式会社アルス社製のマイクロビューAS-807SPを使用している。マイクロビューAS-807SPは、ヘッド外径φ7mm、ヘッド長41mm、NTSC/PAL方式採用、1/6インチCCD固体素子使用、および、有効画素38万画素という仕様である。なお、CCDカメラ3は、レンズ1およびエクステンションチューブ2をその一部に含む構成で実現されてもよい。
【0058】
USBビデオキャプチャー4は、カメラアンプ3bから取得した画像をデジタルデータとしてパソコン5の中に取り込むために使用されるものであり、本実施形態では、株式会社アルファデータ社製のAD-VD0303を使用している。
【0059】
パソコン5は、USBビデオキャプチャー4からデジタル化された画像を取り込むものであり、本実施形態では、画像取り込み用ソフトとして株式会社ULEAD製のVideoStudio 7 SE Basicを使用している。また、パソコン5は、プローブ6の先端部とワーク9の表面との距離を測定するためにも使用される。当該距離を測定する構成、方法については後述する。
【0060】
プローブ6は、微量塗布装置11から供給された試料を、その先端部からワーク9の表面に滴下するものであり、マイクロシリンジのニードル、超硬製針、タングステン製針、あるいは、マイクロドリル(日進工具株式会社製)などが使用される。
【0061】
LEDランプ7は、プローブ6に光を照射することによってワーク9の表面に二次像(影あるいは反射像)を発生させるためのものであり、本実施形態では、高輝度LED(丸型、φ5mm、単色、青緑)を使用している。緑や青緑色のLEDランプは、他の色のLEDランプよりも大きな光度を与えてくれるため、試料塗布装置50に好適に使用すること ができる。また、指向角は、15°、30°、60°等から任意の指向角を選択できる。
【0062】
但し、LEDランプ7は、緑や青緑色のランプに限定されず、白色など他の色のランプを使用することも勿論可能である。そして、指向角も、上記の角度に限定されず、種々の角度から選択可能である。また、LED用照明電源8は、1または複数個設けられる。
【0063】
LED用照明電源8は、LEDランプ7に電源を供給するためのものであり、本実施形態では、株式会社イマック製のパルス調光電源IDPW-30M8Vを使用している。なお、パルス調光電源IDPW-30M8Vは、8回路独立回路である。
【0064】
ワーク9は、プローブ6から滴下された試料を捕集するためのものである。
【0065】
ワーク用ステージ10は、ワーク9を上部に搭載し、後述のY軸アクチュエータ12bと下部で接続している。そして、ワーク用ステージ10は、Y軸アクチュエータ12bの駆動に伴い、ワーク9をY軸方向に動作させる。
【0066】
微量塗布装置11は、プローブ6に所定量の試料を供給するものであり、当該試料は、プローブ6の先端部からワーク9の表面に滴下される。本実施形態では、武蔵エンジニアリング株式会社製の極微量ディスペンサーSMP-3を使用しており、当装置は、体積計量方式で1nLの超微量の試料を吐出することができる。
【0067】
移動装置12は、プローブ6からワーク9に試料を塗布するときに、その滴下位置の位置決めを3次元方向で制御するものであり、本実施形態では、武蔵エンジニアリング株式会社製のSHOT mini 200Sを使用している。
【0068】
なお、移動装置12は、X軸アクチュエータ12aと、Y軸アクチュエータ12bと、Z軸アクチュエータ12cと、駆動制御部12dと、を含む構成である。X軸アクチュエータ12a、Y軸アクチュエータ12b(ステッピングモーター使用)、およびZ軸アクチュエータ12cはそれぞれ、プローブ6とワーク9との位置関係をX方向、Y方向、及びZ方向(図2の上下方向で示される方向)において制御する。駆動制御部12dは、移動装置12の駆動を制御するためのものであり、市販の塗布プログラム(武蔵エンジニアリング株式会社製のMuPRO ver.1.0)がインストールされている。
【0069】
保持部13は、カメラ本体3a、およびLEDランプ7を保持するものである。また、保持部13は、プローブ6のXYZ方向への動作に連動するように試料塗布装置50に固定されている。これにより、カメラ本体3a、LEDランプ7、及びプローブ6がワーク9の表面に対して一体に移動可能に保持された状態が形成される。また、保持部13は、プローブ6に対するCCDカメラ3あるいはLEDランプ7との角度、または、CCDカメラ3とLEDランプ7との位置関係を適宜調整できる構成で実現されている。なお、カメラ本体3a、LEDランプ7、及びプローブ6をワーク9の表面に対して一体に移動可能に保持するものであれば、保持部13はいかなる構成で実現されてもよい。
【0070】
〔距離測定装置100の構成〕
次に、距離測定装置100の詳細を図1により説明する。図1は、距離測定装置100の概略構成を示すブロック図である。
【0071】
パソコン5は、制御部40を含む。制御部40は、CPU(central processing unit)が不図示のROM(read only memory)等の記憶装置に記憶されているプログラムをRAM(random access memory)等に読み出して実行することで実現できる。すなわち、制御部40は、上記CPUが上記記憶装置に格納されたプログラムを実行し、図示しない入出力回路などの周辺回路を制御することによって実現される。
【0072】
その制御部40は、距離測定装置100を含む。距離測定装置100は、プローブ6の先端部(エッジ)とワーク9の表面との距離を測定するものであり、エッジ特定部101と、直線挿入部102と、重なり判定部103と、距離算出部104とを含む構成である。
【0073】
エッジ特定部101は、USBビデオキャプチャー4からデジタル化された画像を取り込む。なお、その画像は、LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる二次像(影あるいは反射像)とプローブ6とを撮像した画像である。
【0074】
そして、エッジ特定部101は、取り込んだ画像におけるプローブ6の先端部(ワーク9の側の先端部であり、以下エッジと称する)を特定する。なお、大半のプローブ6の形状は円柱や円錐であるため、プローブ6の正面中央部がCCDカメラ3に対して最も突き出している部分となる。従って、エッジ特定部101は、その最も突き出している部分をプローブ6のエッジとして特定する。また、最も突き出している部分が存在しないプローブ6の場合(たとえば、先端部がフラットである場合)においても、エッジ特定部101は、プローブの正面中央部をエッジとして特定する。
【0075】
その後、エッジ特定部101は、直線挿入部102に対して、USBビデオキャプチャー4から取得したデジタル化された画像と共に、プローブ6のエッジ位置を示す情報を送信する。
【0076】
なお、エッジ特定部101がプローブ6のエッジ位置を特定する方法は、従来の画像処理で用いられる方法で行えばよいため、ここでの詳細説明は省略する。
【0077】
直線挿入部102は、エッジ特定部101から、上記画像、すなわち、LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる二次像(影あるいは反射像)とプローブ6とを撮像した画像と、プローブ6のエッジ位置を示す情報とを受け取る。そして、直線挿入部102は、上記画像とプローブ6のエッジ位置を示す情報とを受け取る。そして、直線挿入部102は、上記画像上に、上記二次像の外縁に沿った直線を挿入する。以下、当該直線を第1直線と称する。なお、直線挿入部102が第1直線を挿入する位置については、図3を参照して後ほど具体的に説明する。
【0078】
ここで、LEDランプ7からプローブ6に光を照射することによってワーク9の表面に影が現れた場合、その影の外縁はプローブ6の形状(円柱や円錐、棒状など)に従い直線で示されるため、直線挿入部102は、その影の外縁に沿った第1直線を上記画像に挿入する。一方、LEDランプ7からプローブ6に光を照射することによってワーク9の表面に反射像が現れた場合、直線挿入部102は、反射像におけるプローブ6のエッジ部を通る第1直線を上記画像上に挿入する。
【0079】
さらに、直線挿入部102は、第1直線に加え、エッジ特定部101が特定したプローブ6のエッジを通る第2及び第3直線を上記画像に挿入する。なお、第2直線は、上記画像において、プローブ6の長手方向に延びた直線であって、エッジ特定部101が特定したプローブ6のエッジを通る直線である。また、第3直線は、上記画像において、第2直線に垂直な直線であって、エッジ特定部101が特定したプローブ6のエッジを通る直線である。ここで、第2及び第3直線は、CCDカメラ3、プローブ6、及びLEDランプ7がワーク9の表面に対して一体に移動可能に保持されていることから、CCDカメラ3やプローブを動かさない限り固定されたものとなる。
【0080】
以上のように、直線挿入部102は、第1〜第3直線を上記画像に挿入するものである。そして、直線挿入部102は、重なり判定部103に対して、第1〜第3直線を示す情報を送信する。また、直線挿入部102は、重なり判定部103に対して、エッジ特定部101から取得したプローブ6のエッジ位置を示す情報を送信する。ただし、プローブ6のエッジ位置を示す情報は、エッジ特定部101から重なり判定部103に対して送信される構成で実現されてもよい。
【0081】
なお、直線挿入部102が第1〜第3直線を上記画像に挿入する方法は、従来の画像処理で用いられる方法で行えばよいため、ここでの詳細説明は省略する。
【0082】
重なり判定部103は、直線挿入部102から、直線挿入部102が挿入した第1〜第3直線を示す情報を受け取ると共に、エッジ特定部101あるいは直線挿入部102から、プローブ6のエッジ位置を示す情報を受け取る。そして、重なり判定部103は、エッジ特定部101が特定したプローブ6のエッジと直線挿入部102が挿入した第1直線とが重なっているかどうかを判定する。
【0083】
つまり、重なり判定部103は、プローブ6とワーク9の表面とが接近するほど、上記画像上において、プローブ6のエッジと影の外縁に沿って挿入された第1直線とが近づき、プローブ6とワーク9の表面とが接触したときに、上記画像上において、プローブ6のエッジと第1直線とが重なる性質を利用するものである。これにより、上記画像上において、重なり判定部103がプローブ6のエッジと第1直線とが重なったと判定することにより、プローブ6とワーク9の表面との接触が確認される。
【0084】
なお、プローブ6のエッジと第1直線とが重なったかどうかは、従来の画像処理で用いられる方法で行えばよいため、ここでの詳細説明は省略する。
【0085】
続いて、重なり判定部103は、上記画像上において、プローブ6のエッジと第1直線とが重なったことを示す情報を距離算出部104に送信する。また、重なり判定部103は、距離算出部104に対して、直線挿入部102から取得した、直線挿入部102が挿入した第1〜第3直線を示す情報と共に、エッジ特定部101あるいは直線挿入部102から取得した、プローブ6のエッジ位置を示す情報を送信する。
【0086】
距離算出部104は、重なり判定部103から、直線挿入部102が挿入した第1〜第3直線を示す情報と、プローブ6のエッジ位置を示す情報と、プローブ6のエッジと第1直線とが重なったことを示す情報とを受け取る。
【0087】
そして、距離算出部104は、プローブ6が移動して、プローブ6のエッジがワーク9の表面から離れた場合に、エッジ特定部101が特定したプローブ6のエッジから直線挿入部102が挿入した第1直線までの距離に基づいて、エッジとワーク9の表面との距離を算出する。なお、距離算出部104は、プローブ6のエッジと第1直線とが重なったことを示す情報を受け取ったことをトリガとしてエッジとワーク9の表面との距離を算出してもよいし、上記トリガの有無に係らず、エッジとワーク9の表面との距離を算出してもよい。
【0088】
以下、距離算出部104が上記距離を算出する3つの方法を、〔距離算出部104による距離算出方法1〕、〔距離算出部104による距離算出方法2〕、〔距離算出部104による距離算出方法3〕にて説明する。
【0089】
〔距離算出部104による距離算出方法1〕
距離測定装置100は、エッジ特定部101によって特定されたプローブ6のエッジにおいて第1〜第3直線すべてが交差するときに、当該エッジとワーク9の表面との距離を0と算出する。換言すれば、第2及び第3直線はそもそも、エッジ特定部101が特定したプローブ6のエッジを通る直線である。従って、距離測定装置100は、第1直線が当該エッジを通るときに(第1直線が当該エッジと重なるときに)、当該エッジとワーク9の表面との距離を0と算出する。そして、試料塗布装置50では、Z軸アクチュエータ12cの1回の動作で移動するプローブ6の移動量は既知である。
【0090】
従って、試料塗布装置50の最初の動作時に、エッジ特定部101が特定したプローブ6のエッジに第1直線を重ね合わせておくことにより、プローブ6が移動して、プローブ6のエッジがワーク9の表面から離れた場合に、距離算出部104は、Z軸アクチュエータ12cの移動量および移動方向に基づいて、エッジとワーク9の表面との距離を算出することができる。
【0091】
〔距離算出部104による距離算出方法2〕
次に、距離算出部104が上記距離を算出する他の方法を説明する。
【0092】
距離算出部104は、挿入した第1〜第3直線を示す情報を直線挿入部102から取得し、その情報に基づいて、第1及び第3直線によって挟まれる第2直線の距離を算出する。このとき、試料塗布装置50の図示しない記憶装置には、エッジとワーク9の表面との実際の距離と、第1及び第3直線によって挟まれる第2直線の距離との相関関係を示す相関テーブルを準備しておく。すると、距離算出部104は、当該相関テーブルを参照して、算出した第2直線上の距離に対応するエッジとワーク9の表面との間の実際の距離を導出することができる。
【0093】
〔距離算出部104による距離算出方法3〕
次に、距離算出部104が上記距離を算出するさらに他の方法を説明する。
【0094】
プローブ6の種類、プローブ6とワーク9の表面との距離、LEDランプ7の数、LEDランプ7の位置、プローブ6に対するCCDカメラ3の角度、CCDカメラ3とLEDランプ7との位置関係など、様々な条件における画像を撮像しておき、それらの画像を試料塗布装置50の図示しない記憶装置に記憶しておく。同時に、各々の条件におけるプローブ6のエッジとワーク9の表面との距離も測定しておき、対応する画像と関連付けて当該記憶装置に記憶しておく。
【0095】
そして、距離算出部104は、CCDカメラ3が画像(LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる二次像(影あるいは反射像)とプローブ6とを撮像した画像)を撮像した際に、上記記憶装置に記憶された画像中に同じ画像が記憶されているかどうかを読み取りにいく。そして、距離算出部104は、同じ画像が上記記憶装置に記憶されている場合に、その画像に関連付けて記憶されたプローブ6のエッジとワーク9の表面との距離を読み出す。これにより、距離算出部104は、プローブ6のエッジとワーク9の表面との距離を取得(算出)することができる。
【0096】
以上の各種方法によって、距離算出部104は、エッジとワーク9の表面との間の距離を算出することができる。
【0097】
続いて、距離算出部104は、エッジとワーク9の表面との間の距離を示す情報を表示装置60に送信する。
【0098】
ここで、表示装置60は、表示制御部61と表示部62とを含む。
【0099】
表示制御部61は、距離算出部104から、エッジとワーク9の表面との間の距離を示す情報を取得し、当該情報を、表示部62にユーザが確認可能な状態で表示するための信号に変換して、変換した情報を表示部62に出力する。なお、表示部62は、例えば、LCD(液晶ディスプレイ)、PDP(プラズマディスプレイパネル)、またはCRT(cathode-ray tube)ディスプレイなどの表示装置で構成される。
【0100】
このように、距離算出部104が表示装置60に対してエッジとワーク9の表面との間の距離を示す情報を送信することにより、ユーザは、エッジとワーク9の表面との間の距離を確認することができる。
【0101】
また、距離算出部104は、エッジとワーク9の表面との間の距離を示す情報を駆動制御部12dに送信する構成とすることもできる。
【0102】
上述したように、駆動制御部12dは、移動装置12の駆動を制御するためのものである。従って、エッジとワーク9の表面との間の距離を示す情報が駆動制御部12dに入力されることにより、駆動制御部12dは、エッジとワーク9の表面との間の距離をユーザが所望する距離に自動的に制御することができる。
【0103】
以上、距離測定装置100に含まれる各部詳細について説明した。次に、直線挿入部102による第1〜第3直線の挿入例を説明する。
【0104】
〔直線挿入部102の直線挿入例〕
直線挿入部102は、LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる二次像(影あるいは反射像)とプローブ6とを撮像した画像に第1〜第3直線を挿入する。図3から図5は、直線挿入部102による直線挿入例を示す画像である。
【0105】
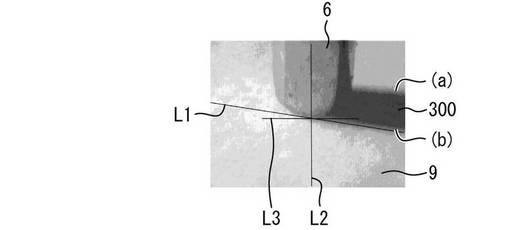
まず、図3について説明する。図3は、プローブ6のエッジとワーク9の表面との間の距離が0μmの状態において、第1直線L1、第2直線L2、及び第3直線L3が挿入された様子を示す画像である。
【0106】
同図において、ワーク9の表面にはプローブ6の影300が1つ現れている。これは、試料塗布装置50がLEDランプ7を1つ備える場合に該当する。なお、プローブ6の影300は図面右側に延びているため、LEDランプ7は図面左側からプローブ6に対して光を照射していることが分かる。このことは、図4、図5においても同様である。
【0107】
図3において、直線挿入部102は、第1直線L1、第2直線L2、及び第3直線L3を上記画像に挿入している。ここで、第1直線L1が挿入される具体的な位置を説明する。なお、第2直線L2、及び第3直線L3が挿入される位置は上述したとおりであるため、ここでの説明は省略する。
【0108】
上述したように、直線挿入部102は、LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる影300とプローブ6とを撮像した画像に、影300の外縁に沿った直線を挿入する。図3では、その影300の外縁は2つ現れる(図中の(a)、(b))。そして、直線挿入部102は、外縁(b)の側に第1直線L1を挿入している。これは、外縁(a)の側に第1直線L1が挿入された場合、エッジ特定部101によって特定されたプローブ6のエッジにおいて第1直線L1、第2直線L2、及び第3直線L3すべてが交差するときに、当該エッジとワーク9の表面との距離が0とならないためである。
【0109】
これに対して、外縁(b)の側に第1直線L1を挿入した場合には、エッジ特定部101によって特定されたプローブ6のエッジにおいて第1直線L1、第2直線L2、及び第3直線L3すべてが交差するときに、当該エッジとワーク9の表面との距離が0となる。つまり、直線挿入部102が挿入する第1直線L1は、影300の外縁であって、しかも影300がプローブ6によって隠れることのない、CCDカメラ3が撮像した画像において下側(図3で言えば、図面下側)に位置する影300の外縁である。
【0110】
続いて、図3の説明に戻ると、距離測定装置100は、エッジ特定部101によって特定されたプローブ6のエッジにおいて第1直線L1、第2直線L2、及び第3直線L3すべてが交差するときに、当該エッジとワーク9の表面との距離を0と算出する。この点、図3では、第1直線L1、第2直線L2、及び第3直線L3すべてが上記エッジで交差しているため、距離測定装置100は、当該エッジとワーク9の表面との距離を0と算出する。
【0111】
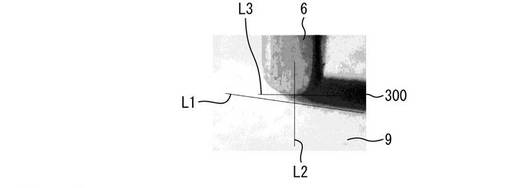
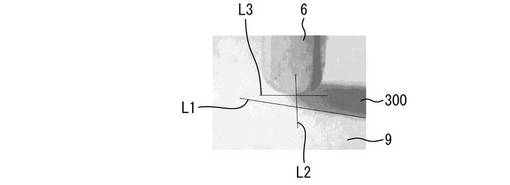
次に、図4は、プローブ6のエッジとワーク9の表面との間の距離が50μmの状態において、第1直線L1、第2直線L2、及び第3直線L3が挿入された様子を示す画像である。また、図5は、プローブ6のエッジとワーク9の表面との間の距離が100μmの状態において、第1直線L1、第2直線L2、及び第3直線L3が挿入された様子を示す画像である。
【0112】
両図に示すように、プローブ6のエッジとワーク9の表面との距離が大きくなるにつれ、第1直線L1、及び第3直線L3によって挟まれる第2直線L2の距離が長くなる。なお、距離算出部104がエッジとワーク9の表面との間の距離を算出する方法は上述したとおりであるため、ここでの詳細説明は省略する。
【0113】
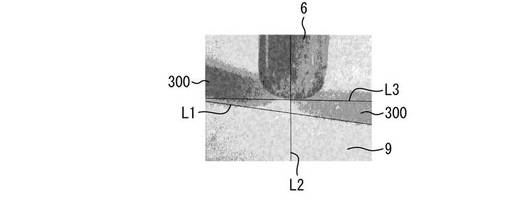
続いて、図6は、プローブ6のエッジとワーク9の表面との間の距離が100μmの状態において、第1直線L1、第2直線L2、及び第3直線L3が挿入された様子を示す画像であり、LEDランプ7を2個使用して、2つの影300が現れた場合の例を示す図である。
【0114】
同図において、ワーク9の表面にはプローブ6の影300が2つ現れている。これは、試料塗布装置50がLEDランプ7を2つ備えることによる。プローブ6の影300は図面右側および左側に延びているため、2つのLEDランプ7はそれぞれ、図面左側および右側からプローブ6に対して光を照射していることが分かる。
【0115】
同図において、直線挿入部102は、右側の影300の外縁に沿って第1直線L1を挿入している。しかしながら、直線挿入部102は、左側の影300の外縁に沿って第1直線L1を挿入することもでき、何れの場合であっても、プローブ6のエッジとワーク9の表面との距離を算出することができる。これは、いずれの場合であっても、エッジ特定部101によって特定されたプローブ6のエッジにおいて第1直線L1、第2直線L2、及び第3直線L3すべてが交差するときに、当該エッジとワーク9の表面との距離が0となるためである。
【0116】
このように、距離測定装置100は、影300が複数存在する場合であっても、直線挿入部102がいずれか1つの影300に着目して第1直線L1を挿入することにより、プローブ6のエッジとワーク9の表面との距離を算出することができる。
【0117】
〔ワーク9の表面に反射像が現れる場合について〕
上記の〔直線挿入部102の直線挿入例〕では、ワーク9の表面にプローブ6の影が現れる場合について説明した。しかしながら、ワーク9の表面の状態(材質(シリコン・ガラスなど)、色、面粗さ等)や、プローブ6に対するLEDランプ7の位置・角度によっては、ワーク9の表面にプローブ6の影が発生せず、プローブ6の反射像が発生する場合がある。そのような場合には、その反射像を利用してプローブ6のエッジとワーク9の表面との距離を算出することができる。
【0118】
図7は、シリコン製のワーク9の表面にプローブ6の反射像6aが発生した場合において、プローブ6のエッジとワーク9の表面との距離が0μmの場合を示す画像であり、図7(a)は、1つのLEDランプ7を使用した場合を、図7(b)は、複数個のLEDランプ7を使用した場合を示す画像である。
【0119】
また、図8は、シリコン製のワーク9の表面にプローブ6の反射像6aが発生した場合において、プローブ6のエッジとワーク9の表面との距離が50μmの場合を示す画像であり、図7(a)は、1つのLEDランプ7を使用した場合を、図7(b)は、複数個のLEDランプ7を使用した場合を示す画像である。
【0120】
両図に示すように、ワーク9の表面の材質等によっては、ワーク9の表面にプローブ6の反射像6aが発生する場合がある。また、反射像6aが発生する場合には、図7(a)及び図8(a)と図7(b)及び図8(b)とを比較して分かるように、プローブ6に対して複数の方向から光を照射することによって、つまり、複数個のLEDランプ7からプローブ6に光を照射することによって、プローブ6の先端の形状を鮮明に撮像することができる。これにより、プローブ6とワーク9の表面との距離の算出が容易になる。
【0121】
ここで、距離算出部104は、ワーク9の表面に反射像6aが発生する場合に、次のようにプローブ6とワーク9の表面との距離を算出する。なお、図1等を参照して行った説明と同じ内容については、その説明を省略する。また、図面の見易さのため、図中には第1直線L1、第2直線L2、及び第3直線L3は記載していない。
【0122】
まず、エッジ特定部101は、USBビデオキャプチャー4からデジタル化された画像を取り込む。なお、その画像は、LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる反射像6aとプローブ6とを撮像した画像である。
【0123】
そして、エッジ特定部101は、取り込んだ画像におけるプローブ6のエッジ位置を特定する。なお、大半のプローブ6の形状は円柱や円錐であるため、プローブ6の正面中央部がCCDカメラ3に対して最も突き出している部分となる。従って、エッジ特定部101は、その最も突き出している部分をプローブ6のエッジとして特定する。
【0124】
直線挿入部102は、エッジ特定部101から、上記画像とプローブ6のエッジ位置を示す情報とを受け取る。そして、直線挿入部102は、上記画像、すなわち、LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる反射像6aとプローブ6とを撮像した画像に、上記反射像6aの外縁(反射像の場合は、プローブ6の影のエッジ部)に沿って第1直線を挿入する。なお、その第1直線は、直線挿入部102が挿入する上記第3直線と平行である。
【0125】
その後、距離算出部104は、直線挿入部102あるいは重なり判定部103から、直線挿入部102が挿入した第1〜第3直線を示す情報を受け取ると共に、エッジ特定部101、直線挿入部102、あるいは重なり判定部103から、プローブ6のエッジ位置を示す情報を受け取る。そして、距離算出部104は、エッジ特定部101が特定したプローブ6のエッジから直線挿入部102が挿入した第1直線までの距離に基づいて、エッジとワーク9の表面との距離を算出する。なお、距離の算出方法は、上述した〔距離算出部104による距離算出方法1〕、〔距離算出部104による距離算出方法2〕のいずれを用いてもよい。
【0126】
また、距離算出部104は、プローブ6のエッジと第1直線とが重なったことを示す情報を受け取ったことをトリガとしてエッジとワーク9の表面との距離を算出してもよいし、上記トリガの有無に係らず、エッジとワーク9の表面との距離を算出してもよい。
【0127】
このようにして、ワーク9の表面に反射像6aが発生する場合においても、距離測定装置100は、プローブ6とワーク9の表面との距離を算出することができる。
【0128】
なお、ワーク9の表面に反射像6aを発生させる他の例として、図9、図10を示す。
【0129】
図9は、ITOプレートの表面にプローブ6の反射像6aが発生した場合において、プローブ6のエッジとITOプレートの表面との距離が0μmの場合を示す画像であり、図9(a)は、1つのLEDランプ7を使用した場合を、図9(b)は、複数個のLEDランプ7を使用した場合を示す画像である。
【0130】
図10は、ITOプレートの表面にプローブ6の反射像6aが発生した場合において、プローブ6のエッジとITOプレートの表面との距離が50μmの場合を示す画像であり、図10(a)は、1つのLEDランプ7を使用した場合を、図10(b)は、複数個のLEDランプ7を使用した場合を示す画像である。
【0131】
図9、図10、及び図7、図8に示すように、ワーク9の表面に反射像6aが発生するケースもある。この点、距離測定装置100では、二次像は、プローブ6の影あるいはプローブ6の反射像6aの何れの場合であっても、プローブ6のエッジとワーク9の表面との距離を算出することができる。それゆえ、利便性の高い距離測定装置100をユーザに提供することができる。
【0132】
〔プローブ6に対するCCDカメラ3の角度について〕
CCDカメラ3が鮮明な二次像(影あるいは反射像)を撮像するために、プローブ6に対するCCDカメラ3の角度に配慮する必要がある。このことを図11から図14を用いて説明する。
【0133】
図11〜図14は、プローブ6に対するCCDカメラ3の撮像方向の角度を75°、70°、60°、45°に設定したときに、CCDカメラ3が撮像したワーク9の表面に現れる影300とプローブ6とを撮像した画像であり、(a)〜(c)はそれぞれ、プローブ6のエッジとワーク9の表面との間の距離を0μm、50μm、100μmとしたときの画像である。
【0134】
上記各図から分かるように、プローブ6に対するCCDカメラ3の撮像方向の角度を小さくするほど、ワーク9の表面を詳細に観察することができる。しかしながら、上記角度が小さくなると、プローブ6と影300との位置関係、とくに、プローブ6のエッジとワーク9の表面との距離を観察することが困難になる。つまり、プローブ6に対するCCDカメラ3の撮像方向の角度が小さくなるほどに、プローブ6のエッジとワーク9の表面との距離を割り出す能力(空間分解能)が低下することになる。このことは、例えば図14(b)にも示されており、プローブ6の先端とワーク9の表面との距離が50μmと離れているにも係らず、影300がプローブ6に対してかなり接近している画像しか得られなくなる。
【0135】
このような結果に基づき、CCDカメラ3は、その撮像方向がプローブ6に対して40°から80°、好ましくは50°から65°の範囲内で、保持部13に保持されていることが好ましいことを本願発明者らは見出した。そのような角度に設定することで、プローブ6と影300との位置関係、とくに、プローブ6のエッジとワーク9の表面との距離の観察が容易になる。
【0136】
なお、各図に示されるワーク9の表面の白色円の径は800μmである。また、ワーク9は、ブルカー社のPrespotted AnchorChip 384MALDI matrixspotsを使用している。さらに、各図のプローブは、三菱マテリアルのMF20を放電加工して製作された超硬製ピンであり、その先端径は100μmである。
【0137】
次に、プローブ6に対するCCDカメラ3の撮像方向の角度を75°、60°、45°に設定したときの試料塗布装置50の様子を図15から図17を用いて説明する。
【0138】
図15から図17はそれぞれ、プローブ6に対するCCDカメラ3の撮像方向の角度を75°、60°、45°に設定したときの試料塗布装置50の様子を示す画像である。
【0139】
図15から分かるように、たとえプローブ6に対するCCDカメラ3の撮像方向の角度が75°に設定されている場合においても、CCDカメラ3はワーク9の表面にかなり接近しつつも接触することはなく、しかも、プローブ6の先端よりもCCDカメラ3の先端下部が上側に位置しているため、CCDカメラ3とワーク9が衝突することはない。
【0140】
〔CCDカメラ3とLEDランプ7との位置関係について〕
CCDカメラ3が鮮明な二次像(影あるいは反射像)を撮像するために、CCDカメラ3とLEDランプ7との位置関係には配慮する必要がある。このことを図18〜図20を用いて説明する。
【0141】
図18〜図20は、プローブ6に対するCCDカメラ3の撮像方向の角度を75°、60°、45°に設定したときに、CCDカメラ3が撮像したワーク9の表面に現れる影300とプローブ6とを撮像した画像を示す図であり、(a)〜(e)はそれぞれ、プローブ6の中心に向かって照射するLEDランプ7の照射方向を、CCDカメラ3の撮像方向に対して平面視でプローブ6の回りに左側に110〜130°回転させた方向、左側に約25°回転させた方向、右側に25〜30°回転させた方向、右側に75〜80°回転させた方向、左側に約60°回転させた方向に設定したときの画像を示す図である。なお、各図において、プローブ6の先端とワーク9の表面との距離はいずれも50μmとしている。
【0142】
このうち、図18(b)・(c)、図19(b)・(c)、及び図20(b)・(c)は、プローブ6の中心に向かって照射するLEDランプ7の照射方向を、CCDカメラ3の撮像方向に対して平面視で左側に約25°回転させた方向、右側に25〜30°回転させた方向の領域に配設されたときのワーク9の表面に現れる影300とプローブ6とを撮像した画像を示す図である。各図に示すように、CCDカメラ3に対して小さな角度の範囲内にLEDランプ7を配した場合、ワーク9の表面に現れる影300がプローブ6によって隠された状態となり、プローブ6のエッジとワーク9の表面との間の距離を影300を利用して算出することは困難となる。このような結果に基づき、LEDランプ7は、平面視で、CCDカメラ3の撮像方向に対してプローブ6の中心を通って直交する軸から、CCDカメラ3の側に対して接近した範囲内にある領域に含まれないように配置する必要があることを本願発明者らは見出した。
【0143】
さらに、図18等を考察した結果、LEDランプ7は、平面視で、CCDカメラ3の撮像方向に対してプローブ6の中心を通って直交する軸から、CCDカメラ3の側およびその反対側に対して45°の範囲内に、好ましくは、CCDカメラ3の側およびその反対側に対して30°の範囲内にある領域において配置されている場合に、ワーク9の表面に発生するプローブ6の影300を鮮明に撮像できることを本願発明者らは見出した。
【0144】
また、複数のLEDランプ7を使用する場合、CCDカメラ3が鮮明な影を撮像するためには、LEDランプ7を最大で4個程度の使用に抑えることが好ましい。一方、反射像を撮像する場合は、複数個のLEDランプ7を使用した方が1個の場合と比べて鮮明な正面反射像が得られることを本願発明者らは見出した。
【0145】
ここで、上記説明では、LEDランプ7は、平面視で、CCDカメラ3の撮像方向に対してプローブ6の中心を通って直交する軸から、CCDカメラ3の側に対して接近した範囲内にある領域に含まれないように配置する必要があることを述べた。しかしながら、このことは、プローブ6のエッジとワーク9の表面との間の距離を影を利用して算出する場合に言えることであって、反射像を利用して上記距離を算出する場合には当てはまらない。むしろ、反射像を利用する場合には、LEDランプ7が強い光をプローブ6に当てることで、光の当たった部分の周りが白くぼやけてしまうハレーションに留意しつつ、正面反射を得る場合には有効となる場合がある。
【0146】
なお、図示していないが、プローブ6のエッジとワーク9の表面との間の距離を反射像を利用して算出する場合には、LEDランプ7は、平面視で、CCDカメラ3の撮像方向に対してプローブ6の中心を通って直交する軸から、CCDカメラ3の側に対して、30°から60°の範囲内で、保持部13に保持されることが好ましいことを本願発明者らは確認した。
【0147】
〔距離測定装置100によって得られる効果〕
以下、距離測定装置100によって得られる効果を説明する。
【0148】
上記構成によれば、エッジ特定部101は、CCDカメラ3が撮像したワーク9の表面に現れるプローブ6の二次像とプローブ6との画像において、プローブ6のエッジを特定する。また直線挿入部102は、その画像において、二次像の外縁に沿った第1直線を挿入する。そして、重なり判定部103は、エッジ特定部101が特定したエッジと直線挿入部102が挿入した第1直線との重なりを判定する。
【0149】
つまり、距離測定装置100は、プローブ6とワーク9の表面とが接近するほど、画像上において、エッジと二次像の外縁に沿って挿入された第1直線とが近づき、プローブ6とワーク9の表面とが接触したときに、画像上において、エッジと第1直線とが重なる性質を利用するものである。従って、重なり判定部103がエッジと第1直線とが重なったと判定することにより、プローブ6とワーク9の表面との接触を確認することができる。
【0150】
それゆえ、距離測定装置100は、エッジと第1直線とが重なった時点でプローブ6とワーク9の表面とが接触したものと捉え、その点を基準に、プローブ6の移動量および移動方向に基づき、エッジとワーク9の表面との距離を測定することができる。
【0151】
また、距離測定装置100は、上述したように、プローブ6の二次像をワーク9の表面に発生させて、エッジ特定部101が特定したエッジと二次像の外縁に沿って挿入された第1直線との位置関係から、エッジとワーク9の表面との距離を測定するものである。
【0152】
それゆえ、距離測定装置100は、LAB技術を利用した画像分析方法とは異なり、プローブ6の径の大小に左右されることなくエッジとワーク9の表面との距離を測定することができる。
【0153】
さらに、距離測定装置100では、1以上のLEDランプ7、CCDカメラ3、及びプローブ6が、ワーク9の表面に対して一体に移動可能に保持された構成である。
【0154】
これにより、1以上のLEDランプ7、CCDカメラ3、及びプローブ6の位置関係は固定された状態で維持されるため、撮像する画像内において、プローブ6の位置が測定ごとに移動し、それにより測定結果にばらつきが生じる事態も回避でき、より安定した測定結果をユーザに提供することができる。しかも、その測定方法ゆえに、ワーク9の表面の形状が安定していない場合(例えばワーク9の表面に傾斜が存在する場合)においても、エッジとワーク9の表面との距離を測定することができる。
【0155】
加えて、1以上のLEDランプ7、CCDカメラ3、及びプローブ6が、ワーク9の表面に対して一体に移動可能に保持されているため、距離測定装置100では、ワーク9の表面に対する作業領域の制限がなくなり、巨大なワーク9の表面への対応も可能となる。つまり、従来の試料塗布装置では、ワーク9の表面の側が移動可能に制御されていたため、ワーク9の表面の形状等によっては、同じワーク9の表面に対して複数のプローブ6を利用して複数の試料を塗布することは困難であった。
【0156】
これに対して、距離測定装置100を試料塗布装置に適用した場合には、同じワーク9の表面に対して短時間に複数の異なる試料の塗布が可能となる。それゆえ、距離測定装置100を利用することにより、著しい生産性の向上をユーザにもたらすことができる。
【0157】
さらに、距離測定装置100では、エッジ特定部101が特定したエッジから直線挿入部102が挿入した第1直線までの距離に基づいて、エッジとワーク9の表面との距離を算出する算出手段を備える構成である。
【0158】
上述したように、距離測定装置100では、エッジ特定部101が、CCDカメラ3が撮像したワーク9の表面に現れるプローブ6の二次像とプローブ6との画像において、プローブ6のエッジを特定する。また直線挿入部102が、当該画像において、二次像の外縁に沿った第1直線を挿入する。そして、さらに、距離測定装置100では、距離算出部104が、エッジ特定部101が特定したエッジから直線挿入部102が挿入した第1直線までの距離に基づいて、エッジとワーク9の表面との距離を算出する。
【0159】
具体的には、例えば、エッジとワーク9の表面との実際の距離と、エッジから直線挿入部102が挿入した第1直線までの距離との相関関係を予め準備しておくことにより、距離算出部104は、エッジから第1直線までの距離に基づいて、エッジとワーク9の表面との距離を算出することができる。これにより、エッジとワーク9の表面との距離が自動的に算出される構成を実現することができる。
【0160】
なお、ここでいうエッジから第1直線までの距離とは、エッジを通り、画像内のプローブ6の長手方向に延びた第1直線と直線挿入部102が挿入した第1直線との交点とエッジとの間の距離をいう。
【0161】
さらに、距離測定装置100では、二次像は、プローブ6の影またはプローブ6の反射像である構成である。
【0162】
上記構成によれば、距離測定装置100では、二次像がプローブ6の影またはプローブ6の反射像の何れであっても対応可能である。すなわち、ワーク9の表面の材質等によって、プローブ6の影ではなくプローブ6の反射像が発生した場合においても、距離測定装置100は、エッジとワーク9の表面との距離を測定することができる。
【0163】
さらに、距離測定装置100では、LEDランプ7は、複数存在する構成である。
【0164】
上記構成によれば、距離測定装置100では、プローブ6に光を照射するLEDランプ7が複数存在する。これにより、プローブ6に対して複数の方向から光が照射されるため、CCDカメラ3は、プローブ6のエッジの形状を鮮明に撮像することができる。この結果、距離測定装置100は、プローブ6のエッジとワーク9の表面との距離をより正確に測定することができる。
【0165】
なお、プローブ6に対して複数の方向から光を照射することにより、反射像がより鮮明にワーク9の表面に発生するという特性からも、上記構成は有効であることが分かる。
【0166】
さらに、距離測定装置100では、LEDランプ7は、平面視で、CCDカメラ3の撮像方向に対してプローブ6の中心を通って直交する軸から、CCDカメラ3の側および反対側に対して45°の範囲内にある領域において配置されている構成である。
【0167】
さらに、距離測定装置100では、LEDランプ7は、平面視で、CCDカメラ3の撮像方向に対してプローブ6の中心を通って直交する軸から、CCDカメラ3の側に対して、30°から60°の範囲内にある領域において配置されている構成である。
【0168】
上記構成により、CCDカメラ3は、ワーク9の表面に発生するプローブ6の二次像をより鮮明に撮像することができ、プローブ6のエッジとワーク9の表面との距離をより正確に測定することができる。
【0169】
さらに、距離測定装置100では、上記CCDカメラ3は、外径が7mmのCCDカメラと、焦点距離が15mmの望遠レンズとを組み合わせてなるものである構成である。
【0170】
従来においても、画像を撮像するために用いられるCCDカメラ3はレンズ部分がCマウントとなっているため、CCDカメラ3をワーク9の表面に近づけるということは、垂直方向(重力方向)での設置以外に不可能といってよかった。
【0171】
この点、上記構成とすることにより、100倍前後のズーム率であっても、プローブ6とレンズとの距離を数十ミリ離して観察することが可能であり、かつ、ワーク9の表面に対する作業領域の制限を軽減することができる。しかも、上記構成を備えるCCDカメラ3は、軽量化が実現されているため、プローブ6と同じ駆動軸に搭載することが可能となる。これにより、距離測定装置100は、1以上のLEDランプ7、CCDカメラ3、及びプローブ6が、ワーク9の表面に対して一体に移動可能に保持されているという構成を容易に実現することができる。
【0172】
さらに、距離測定装置100では、CCDカメラ3は、その撮像方向がプローブ6に対して40°から80°、好ましくは50°から65°の範囲内で保持されている構成である。
【0173】
上記構成により、ワーク9の表面に発生するプローブ6の二次像をより鮮明に撮像することができ、プローブ6のエッジとワーク9の表面との距離をより正確に測定することができる。
【0174】
以上のように、距離測定装置100によって種々の効果が期待できる。
【0175】
〔他の実施例(切削装置200)〕
上記説明では、距離測定装置100を備えた試料塗布装置50について説明した。しかしながら、距離測定装置100は、汎用性が高い装置であるため、その他の各種装置に容易に組み込むことができる。その応用例としては、試料採取装置、マイクロ加工装置、切削装置などが挙げられる。これらの装置では、プローブ(あるいはドリル等)とワーク表面との間の距離を正確に測定・制御する必要があるため、本発明に係る距離測定装置100を好適に適用することができる。
【0176】
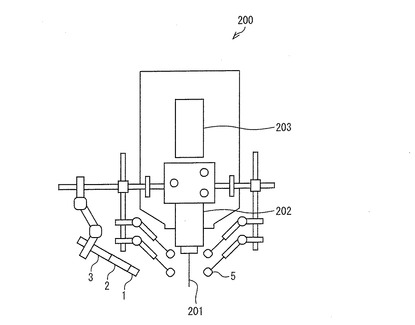
ここで、距離測定装置100を備えた切削装置200について図21を参照して説明する。図21は、距離測定装置100が組み込まれた切削装置200の概略構成を示す図である。なお、図2等を参照して行った説明と同じ内容についてはその説明を省略する。また、図21では、図2に記載されていたUSBビデオキャプチャー4と、パソコン5、移動装置12等の記載は省略している。しかしながら、図21に記載された各部を、図2の移動装置12に組み込むことにより、切削装置200を実現することができる。
【0177】
切削装置200は、ワーク9の表面に対するマイクロ単位での微細加工を行う装置であり、特にワーク9の表面に対する切削を行う装置である。切削装置200は、レンズ1と、エクステンションチューブ2と、CCDカメラ3と、USBビデオキャプチャー4と、パソコン5と、ドリル201と、LEDランプ7と、LED用照明電源8と、ワーク9と、ワーク用ステージ10と、移動装置12と、保持部13、スピンドル202と、ブラシレスモータ203とを含む構成である。
【0178】
ここで、ドリル201は、自身とワーク9の表面との間の距離を正確に制御されたうえで、対象物に対してドリルによる穴あけ加工(切削)を行うものであり、日進工具株式会社製のマイクロドリルNSMDを使用している。マイクロドリルNSMDは、超微細加工に好適な先端部の外径が最小φ0.01mmのものから存在し、その何れを使用してもよい。また、使用するドリルは他社製品であってもよい。
【0179】
スピンドル202は、株式会社ナカニシ製のNR-2550を使用しており、ブラシレスモータ203は、株式会社ナカニシ製のEM25-5000-J4を使用しており、両者の協働により、ドリル201へ回転力を与えている。
【0180】
上記構成を備えることにより、距離測定装置100を備えた切削装置200は以下の効果を奏することができる。すなわち、距離測定装置100は、ドリル201とワーク9の表面との距離を測定することができ、しかも、ドリル201の径の大小に左右されることなく適用可能である。それゆえ、距離測定装置100を備えた切削装置200は、外径が最小φ0.01mmから最大φ0.10mmまでの細い径のドリルを使用するものであるため、マイクロ単位の微細加工を実現することができる。そして、微細加工の分野においては、日本では数少ない職人への依存度が高いことが問題となっているため、距離測定装置100を備えた切削装置200を使用することにより、素人であっても同程度の微細加工を施すことが可能となる。また同時に、製造業全般への極めて大きな経済的効果が期待できる。
【0181】
〔従来技術の課題に対する対策〕
上述したように、ワーク表面の種類によっては、プローブの先端部分において鏡面現象が発生する(図23参照)。その場合、ワーク9の表面にはプローブ6の虚像が映し出され、距離測定装置100は、プローブ6(あるいはドリル等)とワーク9の表面との間の距離の算出が困難になる。
【0182】
そこで、上記問題への対処として、プローブ6をフッ素系材料によりコーティングするという対策が挙げられる。これは、プローブ6をフッ素系材料によりコーティングすることにより、先端部での鏡面現象を防止することが可能となるためである(図22)。これにより、距離測定装置100は、プローブ6(あるいはドリル等)とワーク9の表面との距離を算出できるようになり、上記問題への解決とすることができる。
【0183】
さらに、従来技術の課題として次のような問題点も指摘した。つまり、特許文献1に記載の発明に対して指摘したとおり、表面アレイに生じるプローブの影の幅を可能な限り細くする必要があり、これを可能にするためには、プローブに対するカメラの角度を可能な限り大きくする必要がある。一方、このようにカメラ角度を大きくすると、表面での変化を観察することが難しくなる。特に、小さな点の状態で試料を塗布する場合には、観察する点の面積が限りなく小さくなり、像倍率が小さい場合には点の存在すら掴めなくなることもある。
【0184】
この点、距離測定装置100では、自身が組み込まれる装置の目的やプローブ6の外径等に応じて、プローブ6に対するCCDカメラ3の角度、または、CCDカメラ3とLEDランプ7との位置関係を適宜調整している。これにより、上記従来技術の課題を克服することができる。
【0185】
〔補足〕
最後に、距離測定装置100の各ブロック、特に距離測定装置100のエッジ特定部101、直線挿入部102、重なり判定部103、距離算出部104は、ハードウェアロジックによって構成してもよいし、次のようにCPUを用いてソフトウェアによって実現してもよい。
【0186】
すなわち、距離測定装置100は、各機能を実現する制御プログラムの命令を実行するCPU(central processing unit)、前記プログラムを格納したROM(read only memory)、前記プログラムを展開するRAM(random access memory)、前記プログラムおよび各種データを格納するメモリ等の記憶装置(記録媒体)などを備えている。そして、本発明の目的は、上述した機能を実現するソフトウェアである距離測定装置100の制御プログラムのプログラムコード(実行形式プログラム、中間コードプログラム、ソースプログラム)をコンピュータで読み取り可能に記録した記録媒体を、前記距離測定装置100に供給し、そのコンピュータ(又はCPUやMPU)が記録媒体に記録されているプログラムコードを読み出し実行することによっても、達成可能である。
【0187】
前記記録媒体としては、例えば、磁気テープやカセットテープ等のテープ系、フロッピー(登録商標)ディスク/ハードディスク等の磁気ディスクやコンパクトディスク−ROM/MO/MD/デジタルビデオデイスク/コンパクトディスク−R等の光ディスクを含むディスク系、ICカード(メモリカードを含む)/光カード等のカード系、あるいはマスクROM/EPROM/EEPROM/フラッシュROM等の半導体メモリ系などを用いることができる。
【0188】
また、距離測定装置100を通信ネットワークと接続可能に構成し、前記プログラムコードを通信ネットワークを介して供給してもよい。この通信ネットワークとしては、特に限定されず、例えば、インターネット、イントラネット、エキストラネット、LAN、ISDN、VAN、CATV通信網、仮想専用網(virtual private network)、電話回線網、移動体通信網、衛星通信網等が利用可能である。また、通信ネットワークを構成する伝送媒体としては、特に限定されず、例えば、IEEE1394、USB、電力線搬送、ケーブルTV回線、電話線、ADSL回線等の有線でも、IrDAやリモコンのような赤外線、Bluetooth(登録商標)、802.11無線、HDR、携帯電話網、衛星回線、地上波デジタル網等の無線でも利用可能である。なお、本発明は、前記プログラムコードが電子的な伝送で具現化された、搬送波に埋め込まれたコンピュータデータ信号の形態でも実現され得る。
【0189】
本発明は上述した実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能である。すなわち、請求項に示した範囲で適宜変更した技術的手段を組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【産業上の利用可能性】
【0190】
本発明は、プローブの二次像をワーク表面に発生させて、その二次像とプローブの先端部との位置関係から、プローブの先端部とワーク表面との距離を測定することが可能な距離測定装置に適用され、とくに、試料塗布装置、試料採取装置、マイクロ加工装置、切削装置などに好適に適用することができる。
【符号の説明】
【0191】
1 レンズ(撮像装置)
2 エクステンションチューブ
3 CCDカメラ
3a カメラ本体(撮像装置)
3b カメラアンプ(撮像装置)
4 USBビデオキャプチャー
5 パソコン
6 プローブ
6a プローブの反射像
7 LEDランプ(光源)
8 LED用照明電源
9 ワーク
10 ワーク用ステージ
11 微量塗布装置
12 移動装置
12a X軸アクチュエータ
12b Y軸アクチュエータ
12c Z軸アクチュエータ
12d 駆動制御部
13 保持部
40 制御部
50 試料塗布装置
60 表示装置
61 表示制御部
62 表示部
100 距離測定装置
101 エッジ特定部(特定手段)
102 直線挿入部(挿入手段)
103 重なり判定部(判定手段)
104 距離算出部(算出手段)
200 切削装置
201 ドリル
202 スピンドル
203 ブラシレスモータ
300 影
L1 第1直線
L2 第2直線
L3 第3直線
【技術分野】
【0001】
本発明は、プローブの二次像をワーク表面に発生させて、その二次像とプローブの先端部との位置関係から、プローブの先端部とワーク表面との距離を測定することが可能な距離測定装置、距離測定方法、距離測定プログラム、およびコンピュータ読み取り可能な記録媒体に関する。
【背景技術】
【0002】
従来から、画像処理装置を搭載し、ワークの位置補正をしながら塗布作業を行うディスペンサーや、分析試料に点在する化合物群の分布状態を拡大して検出する顕微鏡などの装置が知られている。
【0003】
これらの装置では、例えば流動性試料をワーク表面に塗布するときに流動性試料の塗布位置や塗布量をコントロールする必要があるため、プローブの先端部とワーク表面との距離を正確に制御する必要がある。
【0004】
特許文献1に記載の試料採取システムは、後続の分析のために表面アレイのうちの少なくとも1つの点から試料を得ることを目的としており、プローブと表面アレイと間の距離を制御するために画像分析手法を用いている。
【0005】
より具体的には、当該試料採取システムは、光源、カメラ、および、画像処理装置を備える。光源は、プローブの先端部に隣接して配置されており、プローブの先端部の影が表面アレイに落ちるよう、プローブの先端部に向かって光のビームを照射する。カメラは、プローブの先端部の画像、および、光源からプローブに光を照射することによって表面アレイに現れる影の像を取得するために設けられている。画像処理装置は、カメラが取り込んだ画像に対してライン平均輝度技術(LAB(average line brightness))を適用し、プローブの先端と表面アレイとの間の実際の距離を決定する。
【0006】
すなわち、当該試料採取システムでは、光源がプローブに向かって光ビームを照射し、カメラは、プローブの先端部と表面アレイの連続的な画像、より具体的には、表面アレイ上に落とされるプローブの先端部の影を取り込む。そして、画像処理装置は、取り込んだ影の画像を輝度によって二値化する。このとき、プローブの先端部および表面アレイを示すLABが最も低い輝度となるため、画像処理装置は、その最も低いLABである2つの水平ライン間の距離をプローブの先端部および表面アレイの間の距離として測定する。そして、当該試料採取システムは、測定した上記距離に基づき、表面アレイを載置するステージを移動してプローブの先端部と表面アレイとの距離を制御している。
【0007】
特許文献2に記載の分画装置は、サンプルプレートへの液滴の滴下の際にサンプルプレートとプローブの先端部との距離を一定に保つために、プローブとサンプルプレートとの距離を測定するための近接センサーをプローブの側方に備えている。そのサンプルプレートは、ステージに搭載されて上下水平方向に移動する。ステージは、制御装置に接続され、その制御装置がステージの移動を制御する。制御装置は、近接センサーの測定値が設定された値となるようにステージをフィードバック制御し、プローブから液滴を滴下する際にサンプルプレートを上方に移動させて、プローブとサンプルプレートとの距離を接近させ、液滴をサンプルプレートに接触させて分画を行っている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2008−542752号公報(2008年11月27日公開)
【特許文献2】特開2005− 98766号公報(2005年 4月14日公開)
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1、2に記載の技術では以下の問題が生じる。
【0010】
特許文献1に記載の試料採取システムでは、プローブの先端部と表面アレイとの間の距離を測定するためにプローブの影を利用しており、この点は後述する本願発明に係る距離測定装置と共通する。
【0011】
しかしながら、当該試料採取システムは、ライン平均輝度(LAB)技術を利用してプローブと表面アレイとの間の距離を測定するため、表面アレイに生じるプローブの影の幅を可能な限り細くする必要がある。これを可能にするためには、プローブに対するカメラの角度を可能な限り大きくする必要がある。一方、このようにカメラ角度を大きくすると、表面での変化を観察することが難しくなる。特に、小さな点の状態で試料を塗布する場合には、観察する点の面積が限りなく小さくなり、像倍率が小さい場合には点の存在すら掴めなくなることもある。
【0012】
このように、LAB技術を利用した画像分析方法では、プローブに対するカメラ角度の設定が極めて重要である。それに対して、特許文献1は、プローブに対してカメラの角度をどのように設定するかについて何ら言及していない。また、特許文献1に記載の試料採取システムは、先端の外径が635μmのプローブを使用しており(明細書の段落〔0044〕参照)、そのように太い先端径のプローブを使用して、表面アレイに生じるプローブの影の幅を可能な限り小さくすることも困難である。加えて、このように太い外径のプローブでは、プローブの先端部に近接するほどカメラによる影の撮像が困難になる。それゆえ、当業者にとって、特許文献1に開示の技術を用いて、どのように特許文献1に記載の課題を解決するか定かではない。
【0013】
さらに、LAB技術に特有の問題もある。すなわち、特許文献1に記載の試料採取システムは、プローブの先端に現れる影を利用してプローブの先端部と表面アレイとの間の距離を測定するものである。しかしながら、ワーク表面の種類によっては、図23に示すように、プローブの先端部分において鏡面現象が発生してしまう。また、ワーク表面が白い場合には、先端部が白くなってしまい、プローブの先端に影が出なくなることもある。同様に、ワーク表面の状態(材質(シリコン・ガラスなど)、色、面粗さ等)や、プローブに対する光源の位置・角度によっては、ワーク表面にプローブの影を発生させることができない。従って、特許文献1の試料採取システムは、LAB技術を利用するがゆえに、ワーク表面の状態(材質、色、面粗さ等)、プローブに対する光源の位置・角度などの制約を受けるという問題がある。
【0014】
さらに、当該試料採取システムは、プローブの先端部と表面アレイとの距離を制御するために表面アレイを載置するステージを移動している。つまり、当該試料採取システムは、ステージに対してプローブが移動する方法を採用するものではない。従って、そのワークエリアは必然的に小さくなり、かつ、ワークエリア表面に傾きが存在する場合には、プローブの先端部と表面アレイとの間の距離を制御することは困難になる。それゆえ、特許文献1に記載の試料採取システムは、大型液晶装置などのワークエリアの大きな装置に対する塗布作業に使用することができない。
【0015】
このように、特許文献1に記載の試料採取システムは、上記種々の問題点を有していることから、ユーザにとって利用性の高いシステムではなかった。
【0016】
一方、特許文献2に記載の試料採取システムは、プローブの先端部と表面アレイとの間の距離を近接センサーによって制御するものである。従って、二次像を利用して上記距離を制御する本願発明に係る距離測定装置とは、そもそも距離の測定方法が異なる。
【0017】
また、近接センサーによってプローブの先端部と表面アレイとの間の距離を測定する場合、測定前の段階で、プローブの先端部と表面アレイとの距離の関係を前もって割り出しておく必要があり、ユーザに手間を強いるものであった。また、ワーク表面が必ずしも水平に支持されているとは限らないため、ある1点の位置で測定した距離が他の位置においても適用されるとは限らず、測定結果の安定性に欠けるものであった。
【0018】
なお、特許文献2に記載の試料採取システムは、プローブとサンプルプレートとの距離を接近させるために、サンプルプレートを上方に移動させるという方法を採用している。また、プローブの先端とサンプルプレートとの間の距離は0.6mmと記載されている(明細書の段落〔0012〕)。このような特許文献2の開示内容に基づけば、また、特許文献2には近接センサーの取付位置等についての詳細な説明が開示されていないことに鑑みれば、当該試料採取システムは、プローブの先端部とサンプルプレートとの間の距離を十数μオーダーにまで接近させることを意図するものではなく、またそのように設計されたものとも言えない。
【0019】
本発明は、上記の問題点に鑑みてなされたものであり、その目的は、ワーク表面に発生したプローブの二次像とプローブの先端部との位置関係から、プローブの先端部とワーク表面との距離を測定する距離測定装置、距離測定装置方法、距離測定プログラム、及びコンピュータ読み取り可能な記録媒体を提供することにある。
【課題を解決するための手段】
【0020】
本発明に係る距離測定装置は、上記の課題を解決するために、
光源からプローブに光を照射することによってワーク表面に現れる二次像と上記プローブとを撮像装置によって撮像し、その撮像装置が撮像した画像を用いて上記プローブの先端部と上記ワーク表面との距離を測定する距離測定装置において、
上記画像における上記先端部を特定する特定手段と、
上記画像における上記二次像の外縁に沿った直線を上記画像上に挿入する挿入手段と、
上記特定手段が特定した上記先端部と上記挿入手段が挿入した上記直線との重なりを判定する判定手段と、を備え、
1以上の上記光源、上記撮像装置、及び上記プローブが、上記ワーク表面に対して一体に移動可能に保持されていることを特徴としている。
【0021】
また、本発明に係る距離測定方法は、上記の課題を解決するために、
光源からプローブに光を照射することによってワーク表面に現れる二次像と上記プローブとを撮像装置によって撮像し、その撮像装置が撮像した画像を用いて上記プローブの先端部と上記ワーク表面との距離を測定する距離測定方法であって、
上記画像における上記先端部を特定する特定ステップと、
上記画像における上記二次像の外縁に沿った直線を上記画像上に挿入する挿入ステップと、
上記特定ステップにて特定された上記先端部と上記挿入ステップにて挿入された上記直線との重なりを判定する判定ステップと、を含むことを特徴としている。
【0022】
上記構成によれば、特定手段(特定ステップ)は、撮像装置が撮像したワーク表面に現れるプローブの二次像とプローブとの画像において、プローブの先端部を特定する。また挿入手段は、その画像において、上記二次像の外縁に沿った直線を挿入する。そして、判定手段は、特定手段(特定ステップ)が特定した上記先端部と挿入手段が挿入した上記直線との重なりを判定する。
【0023】
つまり、本発明に係る距離測定装置(距離測定方法)は、プローブとワーク表面とが接近するほど、上記画像上において、上記先端部と上記二次像の外縁に沿って挿入された上記直線とが近づき、プローブとワーク表面とが接触したときに、上記画像上において、上記先端部と上記直線とが重なる性質を利用するものである。従って、判定手段が上記先端部と上記直線とが重なったと判定することにより、プローブとワーク表面との接触を確認することができる。
【0024】
それゆえ、本発明に係る距離測定装置(距離測定方法)は、上記先端部と上記直線とが重なった時点でプローブとワーク表面とが接触したものと捉え、その点を基準に、プローブの移動量および移動方向に基づき、上記先端部と上記ワーク表面との距離を測定することができる。
【0025】
また、本発明に係る距離測定装置(距離測定方法)は、上述したように、上記プローブの二次像をワーク表面に発生させて、特定手段(特定ステップ)が特定した上記先端部と上記二次像の外縁に沿って挿入された上記直線との位置関係から、上記先端部と上記ワーク表面との距離を測定するものである。
【0026】
それゆえ、本発明に係る距離測定装置(距離測定方法)は、LAB技術を利用した画像分析方法とは異なり、プローブの径の大小に左右されることなく上記先端部と上記ワーク表面との距離を測定することができる。
【0027】
さらに、本発明に係る距離測定装置では、1以上の上記光源、上記撮像装置、及び上記プローブが、上記ワーク表面に対して一体に移動可能に保持された構成である。
【0028】
これにより、1以上の上記光源、上記撮像装置、及び上記プローブの位置関係は固定された状態で維持されるため、撮像する画像内において、プローブの位置が測定ごとに移動し、それにより測定結果にばらつきが生じる事態も回避でき、より安定した測定結果をユーザに提供することができる。しかも、その測定方法ゆえに、ワーク表面の形状が安定していない場合(例えばワーク表面に傾斜が存在する場合)においても、上記先端部と上記ワーク表面との距離を測定することができる。
【0029】
加えて、1以上の上記光源、上記撮像装置、及び上記プローブが、上記ワーク表面に対して一体に移動可能に保持されているため、本発明に係る距離測定装置(距離測定方法)では、ワーク表面に対する作業領域の制限がなくなり、巨大なワーク表面への対応も可能となる。つまり、従来の試料塗布装置では、ワーク表面の側が移動可能に制御されていたため、ワーク表面の形状等によっては、同じワーク表面に対して複数のプローブを利用して複数の試料を塗布することは困難であった。これに対して、本発明に係る距離測定装置を試料塗布装置に適用した場合には、同じワーク表面に対して短時間に複数の異なる試料の塗布が可能となる。それゆえ、本発明に係る距離測定装置(距離測定方法)を利用することにより、著しい生産性の向上をユーザにもたらすことができる。
【0030】
さらに、本発明に係る距離測定装置では、
上記特定手段が特定した上記先端部から上記挿入手段が挿入した上記直線までの距離に基づいて、上記先端部と上記ワーク表面との距離を算出する算出手段を備えることが好ましい。
【0031】
上述したように、本発明に係る距離測定装置では、特定手段が、撮像装置が撮像したワーク表面に現れるプローブの二次像とプローブとの画像において、プローブの先端部を特定する。また挿入手段が、当該画像において、上記二次像の外縁に沿った直線を挿入する。そして、さらに、本発明に係る距離測定装置では、算出手段が、上記特定手段が特定した上記先端部から上記挿入手段が挿入した上記直線までの距離に基づいて、上記先端部と上記ワーク表面との距離を算出する。
【0032】
具体的には、例えば、上記先端部とワーク表面との実際の距離と、上記先端部から上記挿入手段が挿入した上記直線までの距離との相関関係を予め準備しておくことにより、算出手段は、上記先端部から上記直線までの距離に基づいて、上記先端部と上記ワーク表面との距離を算出することができる。これにより、上記先端部と上記ワーク表面との距離が自動的に算出される構成を実現することができる。
【0033】
なお、ここでいう上記先端部から上記直線までの距離とは、上記先端部を通り、画像内のプローブの長手方向に延びた直線と上記挿入手段が挿入した直線との交点と上記先端部との間の距離をいう。
【0034】
さらに、本発明に係る距離測定装置では、
上記二次像は、上記プローブの影または上記プローブの反射像であることが好ましい。
【0035】
上記構成によれば、本発明に係る距離測定装置では、上記二次像が上記プローブの影または上記プローブの反射像の何れであっても対応可能である。すなわち、ワーク表面の材質等によって、プローブの影ではなくプローブの反射像が発生した場合においても、本発明に係る距離測定装置は、上記先端部と上記ワーク表面との距離を測定することができる。
【0036】
さらに、本発明に係る距離測定装置では、
上記光源は、複数存在することが好ましい。
【0037】
上記構成によれば、本発明に係る距離測定装置では、プローブに光を照射する光源が複数存在する。これにより、プローブに対して複数の方向から光が照射されるため、撮像装置は、プローブの先端部の形状を鮮明に撮像することができる。この結果、本発明に係る距離測定装置は、プローブの先端部とワーク表面との距離をより正確に測定することができる。
【0038】
なお、プローブに対して複数の方向から光を照射することにより、反射像がより鮮明にワーク表面に発生するという特性からも、上記構成は有効であることが分かる。
【0039】
さらに、本発明に係る距離測定装置では、
上記光源は、平面視で、上記撮像装置の撮像方向に対して前記プローブの中心を通って直交する軸から、上記撮像装置の側およびその反対側に対して45°の範囲内にある領域において配置されていることが好ましい。
【0040】
さらに、本発明に係る距離測定装置では、
上記光源は、平面視で、上記撮像装置の撮像方向に対して前記プローブの中心を通って直交する軸から、上記撮像装置の側に対して、30°から60°の範囲内にある領域において配置されていることが好ましい。
【0041】
上記構成により、撮像装置は、ワーク表面に発生するプローブの二次像をより鮮明に撮像することができ、プローブの先端部とワーク表面との距離をより正確に測定することができる。
【0042】
さらに、本発明に係る距離測定装置では、
上記撮像装置は、その撮像方向が上記プローブに対して40°から80°、好ましくは50°から65°の範囲内にある領域において配置されていることが好ましい。
【0043】
上記構成により、ワーク表面に発生するプローブの二次像をより鮮明に撮像することができ、プローブの先端部とワーク表面との距離をより正確に測定することができる。
【0044】
なお、上記距離測定装置は、コンピュータによって実現してもよく、この場合には、コンピュータを上記各手段として動作させることにより上記距離測定装置をコンピュータにて実現させる距離測定プログラム、およびそれを記録したコンピュータ読み取り可能な記録媒体も、本発明の範疇に入る。
【発明の効果】
【0045】
本発明に係る距離測定装置は、以上のように、上記画像における上記先端部を特定する特定手段と、上記画像における上記二次像の外縁に沿った直線を上記画像上に挿入する挿入手段と、上記特定手段が特定した上記先端部から上記挿入手段が挿入した上記直線までの距離に基づいて、上記先端部と上記ワーク表面との距離を算出する算出手段と、を備え、1以上の上記光源、上記撮像装置、及び上記プローブが、上記ワーク表面に対して一体に移動可能に保持されている構成である。
【0046】
また、本発明に係る距離測定方法は、以上のように、上記画像における上記先端部を特定する特定ステップと、上記画像における上記二次像の外縁に沿った直線を上記画像上に挿入する挿入ステップと、上記特定ステップにて特定された上記先端部と上記挿入ステップにて挿入された上記直線との重なりを判定する判定ステップと、を含む構成である。
【0047】
それゆえ、ワーク表面に発生したプローブの二次像とプローブの先端部との位置関係から、プローブの先端部とワーク表面との距離を測定することが可能になるという効果を奏する。
【図面の簡単な説明】
【0048】
【図1】本発明に係る距離算出装置の概略構成を示すブロック図である。
【図2】本発明に係る距離測定装置が組み込まれた試料塗布装置の概略構成を示す図である。
【図3】直線挿入部による直線挿入例を示す図であり、プローブのエッジとワークの表面との間の距離が0μmの状態において、第1〜第3直線が挿入された様子を示す画像である。
【図4】直線挿入部による直線挿入例を示す図であり、プローブのエッジとワークの表面との間の距離が50μmの状態において、第1〜第3直線が挿入された様子を示す画像である。
【図5】直線挿入部による直線挿入例を示す図であり、プローブのエッジとワークの表面との間の距離が100μmの状態において、第1〜第3直線が挿入された様子を示す画像である。
【図6】プローブのエッジとワークの表面との間の距離が100μmの状態において、第1〜第3直線が挿入された様子を示す図であり、LEDランプを2個使用して、2つの影が現れた場合の例を示す画像である。
【図7】シリコン製のワークの表面にプローブの反射像が発生した場合において、プローブのエッジとワークの表面との距離が0μmの場合を示す画像であり、(a)は、1つのLEDランプを使用した場合を、(b)は、複数個のLEDランプを使用した場合を示す画像である。
【図8】シリコン製のワークの表面にプローブの反射像が発生した場合において、プローブのエッジとワークの表面との距離が50μmの場合を示す画像であり、(a)は、1つのLEDランプを使用した場合を、(b)は、複数個のLEDランプを使用した場合を示す画像である。
【図9】ITOプレートの表面にプローブ6の反射像が発生した場合において、プローブ6のエッジとITOプレートの表面との距離が0μmの場合を示す画像であり、 (a)は、1つのLEDランプを使用した場合を、(b)は、複数個のLEDランプを使用した場合を示す画像である。
【図10】ITOプレートの表面にプローブ6の反射像が発生した場合において、プローブ6のエッジとITOプレートの表面との距離が50μmの場合を示す画像であり、 (a)は、1つのLEDランプを使用した場合を、(b)は、複数個のLEDランプを使用した場合を示す画像である。
【図11】プローブに対するCCDカメラの撮像方向の角度を75°に設定したときに、CCDカメラが撮像したワークの表面に現れる影とプローブとを撮像した画像であり、(a)〜(c)はそれぞれ、プローブのエッジとワークの表面との間の距離を0μm、50μm、100μmとしたときの画像である。
【図12】プローブに対するCCDカメラの撮像方向の角度を70°に設定したときに、CCDカメラが撮像したワークの表面に現れる影とプローブとを撮像した画像であり、(a)〜(c)はそれぞれ、プローブのエッジとワークの表面との間の距離を0μm、50μm、100μmとしたときの画像である。
【図13】プローブに対するCCDカメラの撮像方向の角度を60°に設定したときに、CCDカメラが撮像したワークの表面に現れる影とプローブとを撮像した画像であり、(a)〜(c)はそれぞれ、プローブのエッジとワークの表面との間の距離を0μm、50μm、100μmとしたときの画像である。
【図14】プローブに対するCCDカメラの撮像方向の角度を45°に設定したときに、CCDカメラが撮像したワークの表面に現れる影とプローブとを撮像した画像であり、(a)〜(c)はそれぞれ、プローブのエッジとワークの表面との間の距離を0μm、50μm、100μmとしたときの画像である。
【図15】プローブに対するCCDカメラの撮像方向の角度を75°に設定したときの試料塗布装置の様子を示す画像である。
【図16】プローブに対するCCDカメラの撮像方向の角度を60°に設定したときの試料塗布装置の様子を示す画像である。
【図17】プローブに対するCCDカメラの撮像方向の角度を45°に設定したときの試料塗布装置の様子を示す画像である。
【図18】プローブ6対するCCDカメラの撮像方向の角度を75°に設定したときに、CCDカメラが撮像したワークの表面に現れる影とプローブとを撮像した画像であり、(a)〜(e)はそれぞれ、プローブ6の中心に向かって照射するLEDランプ7の照射方向を、CCDカメラ3の撮像方向に対して平面視で左側に約110°回転させた方向、左側に約25°回転させた方向、右側に約30°回転させた方向、右側に約75°回転させた方向、左側に約60°回転させた方向に設定したときの画像である。
【図19】プローブ6対するCCDカメラの撮像方向の角度を60°に設定したときに、CCDカメラが撮像したワークの表面に現れる影とプローブとを撮像した画像であり、(a)〜(e)はそれぞれ、プローブ6の中心に向かって照射するLEDランプ7の照射方向を、CCDカメラ3の撮像方向に対して平面視で左側に約130°回転させた方向、左側に約25°回転させた方向、右側に約25°回転させた方向、右側に約80°回転させた方向、左側に約60°回転させた方向に設定したときの画像である。
【図20】プローブ6対するCCDカメラの撮像方向の角度を45°に設定したときに、CCDカメラが撮像したワークの表面に現れる影とプローブとを撮像した画像であり、(a)〜(e)はそれぞれ、プローブ6の中心に向かって照射するLEDランプ7の照射方向を、CCDカメラ3の撮像方向に対して平面視で左側に約130°回転させた方向、左側に約25°回転させた方向、右側に約25°回転させた方向、右側に約80°回転させた方向、左側に約60°回転させた方向に設定したときの画像である。
【図21】本発明に係る距離測定装置が組み込まれた切削装置の概略構成を示す図である。
【図22】プローブをフッ素系材料によりコーティングすることにより、先端部での鏡面現象が防止されることを示すための画像である。
【図23】プローブの先端部分において鏡面現象が発生する様子を示す画像である。
【発明を実施するための形態】
【0049】
以下、本発明の一実施の形態について、図面を参照しながら説明する。説明の便宜上、図面に示した部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。
【0050】
なお、本発明に係る距離測定装置100を概略的に説明すれば以下のとおりである。すなわち、図1および図2を参照すると、距離測定装置100は、LEDランプ(光源)7からプローブ6に光を照射することによりワーク9の表面に現れる二次像とプローブ6とを撮像した画像において、プローブ6のエッジを特定するエッジ特定部(特定手段)101と、上記画像における二次像の外縁に沿った直線を上記画像上に挿入する直線挿入部(挿入手段)102と、エッジ特定部101が特定した上記エッジと直線挿入部102が挿入した上記直線との重なりを判定する重なり判定部(判定手段)103と、を備え、1以上のLEDランプ7、CCDカメラ3、及びプローブ6は、ワーク9の表面に対して一体に移動可能に保持されている構成である。
【0051】
これにより、距離測定装置100は、ワーク9の表面に発生したプローブ6の二次像とプローブ6の先端部との位置関係から、プローブ6の先端部とワーク9の表面との距離を測定することができる。
【0052】
以下、距離測定装置100の構成、及び距離測定装置100を備えた試料塗布装置50の構成について説明する。なお、説明の便宜のため、試料塗布装置50の構成から説明する。
【0053】
〔試料塗布装置50の構成〕
図2は、試料塗布装置50の概略構成を示す図である。
【0054】
同図に示すとおり、試料塗布装置50は、レンズ1と、エクステンションチューブ2と、CCDカメラ3と、USBビデオキャプチャー4と、パソコン5と、プローブ6と、LEDランプ7と、LED用照明電源8と、ワーク9と、ワーク用ステージ10と、微量塗布装置11と、移動装置12と、保持部13とを含む構成である。
【0055】
レンズ1は、LEDランプ7からプローブ6に光を照射することによってワーク9の表面に現れる二次像(影あるいは反射像)とプローブ6とをCCDカメラ3の被写体として結像し、CCDカメラ3に当該被写体を撮像させるものである。本実施形態では、レンズ1は、株式会社エルモ社製のスーパー・マイクロカメラレンズQT3515を使用している。スーパー・マイクロカメラレンズQT3515は、焦点距離f=15mm、最大口径比 1:3.5であり、さらに、画角が9°以下である。従って、当該レンズは、撮影対象物をピンポイントで、つまり、撮像対象として狙った箇所付近のみが表示装置60に映し出されるように、撮影対象物を捕捉できることを特徴としている。
【0056】
エクステンションチューブ2は、レンズ1が取り込んだ被写体の像を拡大するために設けられるものであり、レンズ1とCCDカメラ3の間に2〜4個取り付けられている。エクステンションチューブ2は、2個取り付けることにより25〜30倍に、3個取り付けることにより50〜60倍に、4個取り付けることにより100〜120倍に、被写体の像を拡大する効果を有する。
【0057】
CCDカメラ3は、レンズ1およびエクステンションチューブ2を介して、LEDランプ7からプローブ6に光を照射することによってワーク9の表面に現れる二次像(影あるいは反射像)とプローブ6とを撮像するものであり、カメラ本体3aとカメラアンプ3bとを含む。本実施形態では、CCDカメラ3として、株式会社アルス社製のマイクロビューAS-807SPを使用している。マイクロビューAS-807SPは、ヘッド外径φ7mm、ヘッド長41mm、NTSC/PAL方式採用、1/6インチCCD固体素子使用、および、有効画素38万画素という仕様である。なお、CCDカメラ3は、レンズ1およびエクステンションチューブ2をその一部に含む構成で実現されてもよい。
【0058】
USBビデオキャプチャー4は、カメラアンプ3bから取得した画像をデジタルデータとしてパソコン5の中に取り込むために使用されるものであり、本実施形態では、株式会社アルファデータ社製のAD-VD0303を使用している。
【0059】
パソコン5は、USBビデオキャプチャー4からデジタル化された画像を取り込むものであり、本実施形態では、画像取り込み用ソフトとして株式会社ULEAD製のVideoStudio 7 SE Basicを使用している。また、パソコン5は、プローブ6の先端部とワーク9の表面との距離を測定するためにも使用される。当該距離を測定する構成、方法については後述する。
【0060】
プローブ6は、微量塗布装置11から供給された試料を、その先端部からワーク9の表面に滴下するものであり、マイクロシリンジのニードル、超硬製針、タングステン製針、あるいは、マイクロドリル(日進工具株式会社製)などが使用される。
【0061】
LEDランプ7は、プローブ6に光を照射することによってワーク9の表面に二次像(影あるいは反射像)を発生させるためのものであり、本実施形態では、高輝度LED(丸型、φ5mm、単色、青緑)を使用している。緑や青緑色のLEDランプは、他の色のLEDランプよりも大きな光度を与えてくれるため、試料塗布装置50に好適に使用すること ができる。また、指向角は、15°、30°、60°等から任意の指向角を選択できる。
【0062】
但し、LEDランプ7は、緑や青緑色のランプに限定されず、白色など他の色のランプを使用することも勿論可能である。そして、指向角も、上記の角度に限定されず、種々の角度から選択可能である。また、LED用照明電源8は、1または複数個設けられる。
【0063】
LED用照明電源8は、LEDランプ7に電源を供給するためのものであり、本実施形態では、株式会社イマック製のパルス調光電源IDPW-30M8Vを使用している。なお、パルス調光電源IDPW-30M8Vは、8回路独立回路である。
【0064】
ワーク9は、プローブ6から滴下された試料を捕集するためのものである。
【0065】
ワーク用ステージ10は、ワーク9を上部に搭載し、後述のY軸アクチュエータ12bと下部で接続している。そして、ワーク用ステージ10は、Y軸アクチュエータ12bの駆動に伴い、ワーク9をY軸方向に動作させる。
【0066】
微量塗布装置11は、プローブ6に所定量の試料を供給するものであり、当該試料は、プローブ6の先端部からワーク9の表面に滴下される。本実施形態では、武蔵エンジニアリング株式会社製の極微量ディスペンサーSMP-3を使用しており、当装置は、体積計量方式で1nLの超微量の試料を吐出することができる。
【0067】
移動装置12は、プローブ6からワーク9に試料を塗布するときに、その滴下位置の位置決めを3次元方向で制御するものであり、本実施形態では、武蔵エンジニアリング株式会社製のSHOT mini 200Sを使用している。
【0068】
なお、移動装置12は、X軸アクチュエータ12aと、Y軸アクチュエータ12bと、Z軸アクチュエータ12cと、駆動制御部12dと、を含む構成である。X軸アクチュエータ12a、Y軸アクチュエータ12b(ステッピングモーター使用)、およびZ軸アクチュエータ12cはそれぞれ、プローブ6とワーク9との位置関係をX方向、Y方向、及びZ方向(図2の上下方向で示される方向)において制御する。駆動制御部12dは、移動装置12の駆動を制御するためのものであり、市販の塗布プログラム(武蔵エンジニアリング株式会社製のMuPRO ver.1.0)がインストールされている。
【0069】
保持部13は、カメラ本体3a、およびLEDランプ7を保持するものである。また、保持部13は、プローブ6のXYZ方向への動作に連動するように試料塗布装置50に固定されている。これにより、カメラ本体3a、LEDランプ7、及びプローブ6がワーク9の表面に対して一体に移動可能に保持された状態が形成される。また、保持部13は、プローブ6に対するCCDカメラ3あるいはLEDランプ7との角度、または、CCDカメラ3とLEDランプ7との位置関係を適宜調整できる構成で実現されている。なお、カメラ本体3a、LEDランプ7、及びプローブ6をワーク9の表面に対して一体に移動可能に保持するものであれば、保持部13はいかなる構成で実現されてもよい。
【0070】
〔距離測定装置100の構成〕
次に、距離測定装置100の詳細を図1により説明する。図1は、距離測定装置100の概略構成を示すブロック図である。
【0071】
パソコン5は、制御部40を含む。制御部40は、CPU(central processing unit)が不図示のROM(read only memory)等の記憶装置に記憶されているプログラムをRAM(random access memory)等に読み出して実行することで実現できる。すなわち、制御部40は、上記CPUが上記記憶装置に格納されたプログラムを実行し、図示しない入出力回路などの周辺回路を制御することによって実現される。
【0072】
その制御部40は、距離測定装置100を含む。距離測定装置100は、プローブ6の先端部(エッジ)とワーク9の表面との距離を測定するものであり、エッジ特定部101と、直線挿入部102と、重なり判定部103と、距離算出部104とを含む構成である。
【0073】
エッジ特定部101は、USBビデオキャプチャー4からデジタル化された画像を取り込む。なお、その画像は、LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる二次像(影あるいは反射像)とプローブ6とを撮像した画像である。
【0074】
そして、エッジ特定部101は、取り込んだ画像におけるプローブ6の先端部(ワーク9の側の先端部であり、以下エッジと称する)を特定する。なお、大半のプローブ6の形状は円柱や円錐であるため、プローブ6の正面中央部がCCDカメラ3に対して最も突き出している部分となる。従って、エッジ特定部101は、その最も突き出している部分をプローブ6のエッジとして特定する。また、最も突き出している部分が存在しないプローブ6の場合(たとえば、先端部がフラットである場合)においても、エッジ特定部101は、プローブの正面中央部をエッジとして特定する。
【0075】
その後、エッジ特定部101は、直線挿入部102に対して、USBビデオキャプチャー4から取得したデジタル化された画像と共に、プローブ6のエッジ位置を示す情報を送信する。
【0076】
なお、エッジ特定部101がプローブ6のエッジ位置を特定する方法は、従来の画像処理で用いられる方法で行えばよいため、ここでの詳細説明は省略する。
【0077】
直線挿入部102は、エッジ特定部101から、上記画像、すなわち、LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる二次像(影あるいは反射像)とプローブ6とを撮像した画像と、プローブ6のエッジ位置を示す情報とを受け取る。そして、直線挿入部102は、上記画像とプローブ6のエッジ位置を示す情報とを受け取る。そして、直線挿入部102は、上記画像上に、上記二次像の外縁に沿った直線を挿入する。以下、当該直線を第1直線と称する。なお、直線挿入部102が第1直線を挿入する位置については、図3を参照して後ほど具体的に説明する。
【0078】
ここで、LEDランプ7からプローブ6に光を照射することによってワーク9の表面に影が現れた場合、その影の外縁はプローブ6の形状(円柱や円錐、棒状など)に従い直線で示されるため、直線挿入部102は、その影の外縁に沿った第1直線を上記画像に挿入する。一方、LEDランプ7からプローブ6に光を照射することによってワーク9の表面に反射像が現れた場合、直線挿入部102は、反射像におけるプローブ6のエッジ部を通る第1直線を上記画像上に挿入する。
【0079】
さらに、直線挿入部102は、第1直線に加え、エッジ特定部101が特定したプローブ6のエッジを通る第2及び第3直線を上記画像に挿入する。なお、第2直線は、上記画像において、プローブ6の長手方向に延びた直線であって、エッジ特定部101が特定したプローブ6のエッジを通る直線である。また、第3直線は、上記画像において、第2直線に垂直な直線であって、エッジ特定部101が特定したプローブ6のエッジを通る直線である。ここで、第2及び第3直線は、CCDカメラ3、プローブ6、及びLEDランプ7がワーク9の表面に対して一体に移動可能に保持されていることから、CCDカメラ3やプローブを動かさない限り固定されたものとなる。
【0080】
以上のように、直線挿入部102は、第1〜第3直線を上記画像に挿入するものである。そして、直線挿入部102は、重なり判定部103に対して、第1〜第3直線を示す情報を送信する。また、直線挿入部102は、重なり判定部103に対して、エッジ特定部101から取得したプローブ6のエッジ位置を示す情報を送信する。ただし、プローブ6のエッジ位置を示す情報は、エッジ特定部101から重なり判定部103に対して送信される構成で実現されてもよい。
【0081】
なお、直線挿入部102が第1〜第3直線を上記画像に挿入する方法は、従来の画像処理で用いられる方法で行えばよいため、ここでの詳細説明は省略する。
【0082】
重なり判定部103は、直線挿入部102から、直線挿入部102が挿入した第1〜第3直線を示す情報を受け取ると共に、エッジ特定部101あるいは直線挿入部102から、プローブ6のエッジ位置を示す情報を受け取る。そして、重なり判定部103は、エッジ特定部101が特定したプローブ6のエッジと直線挿入部102が挿入した第1直線とが重なっているかどうかを判定する。
【0083】
つまり、重なり判定部103は、プローブ6とワーク9の表面とが接近するほど、上記画像上において、プローブ6のエッジと影の外縁に沿って挿入された第1直線とが近づき、プローブ6とワーク9の表面とが接触したときに、上記画像上において、プローブ6のエッジと第1直線とが重なる性質を利用するものである。これにより、上記画像上において、重なり判定部103がプローブ6のエッジと第1直線とが重なったと判定することにより、プローブ6とワーク9の表面との接触が確認される。
【0084】
なお、プローブ6のエッジと第1直線とが重なったかどうかは、従来の画像処理で用いられる方法で行えばよいため、ここでの詳細説明は省略する。
【0085】
続いて、重なり判定部103は、上記画像上において、プローブ6のエッジと第1直線とが重なったことを示す情報を距離算出部104に送信する。また、重なり判定部103は、距離算出部104に対して、直線挿入部102から取得した、直線挿入部102が挿入した第1〜第3直線を示す情報と共に、エッジ特定部101あるいは直線挿入部102から取得した、プローブ6のエッジ位置を示す情報を送信する。
【0086】
距離算出部104は、重なり判定部103から、直線挿入部102が挿入した第1〜第3直線を示す情報と、プローブ6のエッジ位置を示す情報と、プローブ6のエッジと第1直線とが重なったことを示す情報とを受け取る。
【0087】
そして、距離算出部104は、プローブ6が移動して、プローブ6のエッジがワーク9の表面から離れた場合に、エッジ特定部101が特定したプローブ6のエッジから直線挿入部102が挿入した第1直線までの距離に基づいて、エッジとワーク9の表面との距離を算出する。なお、距離算出部104は、プローブ6のエッジと第1直線とが重なったことを示す情報を受け取ったことをトリガとしてエッジとワーク9の表面との距離を算出してもよいし、上記トリガの有無に係らず、エッジとワーク9の表面との距離を算出してもよい。
【0088】
以下、距離算出部104が上記距離を算出する3つの方法を、〔距離算出部104による距離算出方法1〕、〔距離算出部104による距離算出方法2〕、〔距離算出部104による距離算出方法3〕にて説明する。
【0089】
〔距離算出部104による距離算出方法1〕
距離測定装置100は、エッジ特定部101によって特定されたプローブ6のエッジにおいて第1〜第3直線すべてが交差するときに、当該エッジとワーク9の表面との距離を0と算出する。換言すれば、第2及び第3直線はそもそも、エッジ特定部101が特定したプローブ6のエッジを通る直線である。従って、距離測定装置100は、第1直線が当該エッジを通るときに(第1直線が当該エッジと重なるときに)、当該エッジとワーク9の表面との距離を0と算出する。そして、試料塗布装置50では、Z軸アクチュエータ12cの1回の動作で移動するプローブ6の移動量は既知である。
【0090】
従って、試料塗布装置50の最初の動作時に、エッジ特定部101が特定したプローブ6のエッジに第1直線を重ね合わせておくことにより、プローブ6が移動して、プローブ6のエッジがワーク9の表面から離れた場合に、距離算出部104は、Z軸アクチュエータ12cの移動量および移動方向に基づいて、エッジとワーク9の表面との距離を算出することができる。
【0091】
〔距離算出部104による距離算出方法2〕
次に、距離算出部104が上記距離を算出する他の方法を説明する。
【0092】
距離算出部104は、挿入した第1〜第3直線を示す情報を直線挿入部102から取得し、その情報に基づいて、第1及び第3直線によって挟まれる第2直線の距離を算出する。このとき、試料塗布装置50の図示しない記憶装置には、エッジとワーク9の表面との実際の距離と、第1及び第3直線によって挟まれる第2直線の距離との相関関係を示す相関テーブルを準備しておく。すると、距離算出部104は、当該相関テーブルを参照して、算出した第2直線上の距離に対応するエッジとワーク9の表面との間の実際の距離を導出することができる。
【0093】
〔距離算出部104による距離算出方法3〕
次に、距離算出部104が上記距離を算出するさらに他の方法を説明する。
【0094】
プローブ6の種類、プローブ6とワーク9の表面との距離、LEDランプ7の数、LEDランプ7の位置、プローブ6に対するCCDカメラ3の角度、CCDカメラ3とLEDランプ7との位置関係など、様々な条件における画像を撮像しておき、それらの画像を試料塗布装置50の図示しない記憶装置に記憶しておく。同時に、各々の条件におけるプローブ6のエッジとワーク9の表面との距離も測定しておき、対応する画像と関連付けて当該記憶装置に記憶しておく。
【0095】
そして、距離算出部104は、CCDカメラ3が画像(LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる二次像(影あるいは反射像)とプローブ6とを撮像した画像)を撮像した際に、上記記憶装置に記憶された画像中に同じ画像が記憶されているかどうかを読み取りにいく。そして、距離算出部104は、同じ画像が上記記憶装置に記憶されている場合に、その画像に関連付けて記憶されたプローブ6のエッジとワーク9の表面との距離を読み出す。これにより、距離算出部104は、プローブ6のエッジとワーク9の表面との距離を取得(算出)することができる。
【0096】
以上の各種方法によって、距離算出部104は、エッジとワーク9の表面との間の距離を算出することができる。
【0097】
続いて、距離算出部104は、エッジとワーク9の表面との間の距離を示す情報を表示装置60に送信する。
【0098】
ここで、表示装置60は、表示制御部61と表示部62とを含む。
【0099】
表示制御部61は、距離算出部104から、エッジとワーク9の表面との間の距離を示す情報を取得し、当該情報を、表示部62にユーザが確認可能な状態で表示するための信号に変換して、変換した情報を表示部62に出力する。なお、表示部62は、例えば、LCD(液晶ディスプレイ)、PDP(プラズマディスプレイパネル)、またはCRT(cathode-ray tube)ディスプレイなどの表示装置で構成される。
【0100】
このように、距離算出部104が表示装置60に対してエッジとワーク9の表面との間の距離を示す情報を送信することにより、ユーザは、エッジとワーク9の表面との間の距離を確認することができる。
【0101】
また、距離算出部104は、エッジとワーク9の表面との間の距離を示す情報を駆動制御部12dに送信する構成とすることもできる。
【0102】
上述したように、駆動制御部12dは、移動装置12の駆動を制御するためのものである。従って、エッジとワーク9の表面との間の距離を示す情報が駆動制御部12dに入力されることにより、駆動制御部12dは、エッジとワーク9の表面との間の距離をユーザが所望する距離に自動的に制御することができる。
【0103】
以上、距離測定装置100に含まれる各部詳細について説明した。次に、直線挿入部102による第1〜第3直線の挿入例を説明する。
【0104】
〔直線挿入部102の直線挿入例〕
直線挿入部102は、LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる二次像(影あるいは反射像)とプローブ6とを撮像した画像に第1〜第3直線を挿入する。図3から図5は、直線挿入部102による直線挿入例を示す画像である。
【0105】
まず、図3について説明する。図3は、プローブ6のエッジとワーク9の表面との間の距離が0μmの状態において、第1直線L1、第2直線L2、及び第3直線L3が挿入された様子を示す画像である。
【0106】
同図において、ワーク9の表面にはプローブ6の影300が1つ現れている。これは、試料塗布装置50がLEDランプ7を1つ備える場合に該当する。なお、プローブ6の影300は図面右側に延びているため、LEDランプ7は図面左側からプローブ6に対して光を照射していることが分かる。このことは、図4、図5においても同様である。
【0107】
図3において、直線挿入部102は、第1直線L1、第2直線L2、及び第3直線L3を上記画像に挿入している。ここで、第1直線L1が挿入される具体的な位置を説明する。なお、第2直線L2、及び第3直線L3が挿入される位置は上述したとおりであるため、ここでの説明は省略する。
【0108】
上述したように、直線挿入部102は、LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる影300とプローブ6とを撮像した画像に、影300の外縁に沿った直線を挿入する。図3では、その影300の外縁は2つ現れる(図中の(a)、(b))。そして、直線挿入部102は、外縁(b)の側に第1直線L1を挿入している。これは、外縁(a)の側に第1直線L1が挿入された場合、エッジ特定部101によって特定されたプローブ6のエッジにおいて第1直線L1、第2直線L2、及び第3直線L3すべてが交差するときに、当該エッジとワーク9の表面との距離が0とならないためである。
【0109】
これに対して、外縁(b)の側に第1直線L1を挿入した場合には、エッジ特定部101によって特定されたプローブ6のエッジにおいて第1直線L1、第2直線L2、及び第3直線L3すべてが交差するときに、当該エッジとワーク9の表面との距離が0となる。つまり、直線挿入部102が挿入する第1直線L1は、影300の外縁であって、しかも影300がプローブ6によって隠れることのない、CCDカメラ3が撮像した画像において下側(図3で言えば、図面下側)に位置する影300の外縁である。
【0110】
続いて、図3の説明に戻ると、距離測定装置100は、エッジ特定部101によって特定されたプローブ6のエッジにおいて第1直線L1、第2直線L2、及び第3直線L3すべてが交差するときに、当該エッジとワーク9の表面との距離を0と算出する。この点、図3では、第1直線L1、第2直線L2、及び第3直線L3すべてが上記エッジで交差しているため、距離測定装置100は、当該エッジとワーク9の表面との距離を0と算出する。
【0111】
次に、図4は、プローブ6のエッジとワーク9の表面との間の距離が50μmの状態において、第1直線L1、第2直線L2、及び第3直線L3が挿入された様子を示す画像である。また、図5は、プローブ6のエッジとワーク9の表面との間の距離が100μmの状態において、第1直線L1、第2直線L2、及び第3直線L3が挿入された様子を示す画像である。
【0112】
両図に示すように、プローブ6のエッジとワーク9の表面との距離が大きくなるにつれ、第1直線L1、及び第3直線L3によって挟まれる第2直線L2の距離が長くなる。なお、距離算出部104がエッジとワーク9の表面との間の距離を算出する方法は上述したとおりであるため、ここでの詳細説明は省略する。
【0113】
続いて、図6は、プローブ6のエッジとワーク9の表面との間の距離が100μmの状態において、第1直線L1、第2直線L2、及び第3直線L3が挿入された様子を示す画像であり、LEDランプ7を2個使用して、2つの影300が現れた場合の例を示す図である。
【0114】
同図において、ワーク9の表面にはプローブ6の影300が2つ現れている。これは、試料塗布装置50がLEDランプ7を2つ備えることによる。プローブ6の影300は図面右側および左側に延びているため、2つのLEDランプ7はそれぞれ、図面左側および右側からプローブ6に対して光を照射していることが分かる。
【0115】
同図において、直線挿入部102は、右側の影300の外縁に沿って第1直線L1を挿入している。しかしながら、直線挿入部102は、左側の影300の外縁に沿って第1直線L1を挿入することもでき、何れの場合であっても、プローブ6のエッジとワーク9の表面との距離を算出することができる。これは、いずれの場合であっても、エッジ特定部101によって特定されたプローブ6のエッジにおいて第1直線L1、第2直線L2、及び第3直線L3すべてが交差するときに、当該エッジとワーク9の表面との距離が0となるためである。
【0116】
このように、距離測定装置100は、影300が複数存在する場合であっても、直線挿入部102がいずれか1つの影300に着目して第1直線L1を挿入することにより、プローブ6のエッジとワーク9の表面との距離を算出することができる。
【0117】
〔ワーク9の表面に反射像が現れる場合について〕
上記の〔直線挿入部102の直線挿入例〕では、ワーク9の表面にプローブ6の影が現れる場合について説明した。しかしながら、ワーク9の表面の状態(材質(シリコン・ガラスなど)、色、面粗さ等)や、プローブ6に対するLEDランプ7の位置・角度によっては、ワーク9の表面にプローブ6の影が発生せず、プローブ6の反射像が発生する場合がある。そのような場合には、その反射像を利用してプローブ6のエッジとワーク9の表面との距離を算出することができる。
【0118】
図7は、シリコン製のワーク9の表面にプローブ6の反射像6aが発生した場合において、プローブ6のエッジとワーク9の表面との距離が0μmの場合を示す画像であり、図7(a)は、1つのLEDランプ7を使用した場合を、図7(b)は、複数個のLEDランプ7を使用した場合を示す画像である。
【0119】
また、図8は、シリコン製のワーク9の表面にプローブ6の反射像6aが発生した場合において、プローブ6のエッジとワーク9の表面との距離が50μmの場合を示す画像であり、図7(a)は、1つのLEDランプ7を使用した場合を、図7(b)は、複数個のLEDランプ7を使用した場合を示す画像である。
【0120】
両図に示すように、ワーク9の表面の材質等によっては、ワーク9の表面にプローブ6の反射像6aが発生する場合がある。また、反射像6aが発生する場合には、図7(a)及び図8(a)と図7(b)及び図8(b)とを比較して分かるように、プローブ6に対して複数の方向から光を照射することによって、つまり、複数個のLEDランプ7からプローブ6に光を照射することによって、プローブ6の先端の形状を鮮明に撮像することができる。これにより、プローブ6とワーク9の表面との距離の算出が容易になる。
【0121】
ここで、距離算出部104は、ワーク9の表面に反射像6aが発生する場合に、次のようにプローブ6とワーク9の表面との距離を算出する。なお、図1等を参照して行った説明と同じ内容については、その説明を省略する。また、図面の見易さのため、図中には第1直線L1、第2直線L2、及び第3直線L3は記載していない。
【0122】
まず、エッジ特定部101は、USBビデオキャプチャー4からデジタル化された画像を取り込む。なお、その画像は、LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる反射像6aとプローブ6とを撮像した画像である。
【0123】
そして、エッジ特定部101は、取り込んだ画像におけるプローブ6のエッジ位置を特定する。なお、大半のプローブ6の形状は円柱や円錐であるため、プローブ6の正面中央部がCCDカメラ3に対して最も突き出している部分となる。従って、エッジ特定部101は、その最も突き出している部分をプローブ6のエッジとして特定する。
【0124】
直線挿入部102は、エッジ特定部101から、上記画像とプローブ6のエッジ位置を示す情報とを受け取る。そして、直線挿入部102は、上記画像、すなわち、LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる反射像6aとプローブ6とを撮像した画像に、上記反射像6aの外縁(反射像の場合は、プローブ6の影のエッジ部)に沿って第1直線を挿入する。なお、その第1直線は、直線挿入部102が挿入する上記第3直線と平行である。
【0125】
その後、距離算出部104は、直線挿入部102あるいは重なり判定部103から、直線挿入部102が挿入した第1〜第3直線を示す情報を受け取ると共に、エッジ特定部101、直線挿入部102、あるいは重なり判定部103から、プローブ6のエッジ位置を示す情報を受け取る。そして、距離算出部104は、エッジ特定部101が特定したプローブ6のエッジから直線挿入部102が挿入した第1直線までの距離に基づいて、エッジとワーク9の表面との距離を算出する。なお、距離の算出方法は、上述した〔距離算出部104による距離算出方法1〕、〔距離算出部104による距離算出方法2〕のいずれを用いてもよい。
【0126】
また、距離算出部104は、プローブ6のエッジと第1直線とが重なったことを示す情報を受け取ったことをトリガとしてエッジとワーク9の表面との距離を算出してもよいし、上記トリガの有無に係らず、エッジとワーク9の表面との距離を算出してもよい。
【0127】
このようにして、ワーク9の表面に反射像6aが発生する場合においても、距離測定装置100は、プローブ6とワーク9の表面との距離を算出することができる。
【0128】
なお、ワーク9の表面に反射像6aを発生させる他の例として、図9、図10を示す。
【0129】
図9は、ITOプレートの表面にプローブ6の反射像6aが発生した場合において、プローブ6のエッジとITOプレートの表面との距離が0μmの場合を示す画像であり、図9(a)は、1つのLEDランプ7を使用した場合を、図9(b)は、複数個のLEDランプ7を使用した場合を示す画像である。
【0130】
図10は、ITOプレートの表面にプローブ6の反射像6aが発生した場合において、プローブ6のエッジとITOプレートの表面との距離が50μmの場合を示す画像であり、図10(a)は、1つのLEDランプ7を使用した場合を、図10(b)は、複数個のLEDランプ7を使用した場合を示す画像である。
【0131】
図9、図10、及び図7、図8に示すように、ワーク9の表面に反射像6aが発生するケースもある。この点、距離測定装置100では、二次像は、プローブ6の影あるいはプローブ6の反射像6aの何れの場合であっても、プローブ6のエッジとワーク9の表面との距離を算出することができる。それゆえ、利便性の高い距離測定装置100をユーザに提供することができる。
【0132】
〔プローブ6に対するCCDカメラ3の角度について〕
CCDカメラ3が鮮明な二次像(影あるいは反射像)を撮像するために、プローブ6に対するCCDカメラ3の角度に配慮する必要がある。このことを図11から図14を用いて説明する。
【0133】
図11〜図14は、プローブ6に対するCCDカメラ3の撮像方向の角度を75°、70°、60°、45°に設定したときに、CCDカメラ3が撮像したワーク9の表面に現れる影300とプローブ6とを撮像した画像であり、(a)〜(c)はそれぞれ、プローブ6のエッジとワーク9の表面との間の距離を0μm、50μm、100μmとしたときの画像である。
【0134】
上記各図から分かるように、プローブ6に対するCCDカメラ3の撮像方向の角度を小さくするほど、ワーク9の表面を詳細に観察することができる。しかしながら、上記角度が小さくなると、プローブ6と影300との位置関係、とくに、プローブ6のエッジとワーク9の表面との距離を観察することが困難になる。つまり、プローブ6に対するCCDカメラ3の撮像方向の角度が小さくなるほどに、プローブ6のエッジとワーク9の表面との距離を割り出す能力(空間分解能)が低下することになる。このことは、例えば図14(b)にも示されており、プローブ6の先端とワーク9の表面との距離が50μmと離れているにも係らず、影300がプローブ6に対してかなり接近している画像しか得られなくなる。
【0135】
このような結果に基づき、CCDカメラ3は、その撮像方向がプローブ6に対して40°から80°、好ましくは50°から65°の範囲内で、保持部13に保持されていることが好ましいことを本願発明者らは見出した。そのような角度に設定することで、プローブ6と影300との位置関係、とくに、プローブ6のエッジとワーク9の表面との距離の観察が容易になる。
【0136】
なお、各図に示されるワーク9の表面の白色円の径は800μmである。また、ワーク9は、ブルカー社のPrespotted AnchorChip 384MALDI matrixspotsを使用している。さらに、各図のプローブは、三菱マテリアルのMF20を放電加工して製作された超硬製ピンであり、その先端径は100μmである。
【0137】
次に、プローブ6に対するCCDカメラ3の撮像方向の角度を75°、60°、45°に設定したときの試料塗布装置50の様子を図15から図17を用いて説明する。
【0138】
図15から図17はそれぞれ、プローブ6に対するCCDカメラ3の撮像方向の角度を75°、60°、45°に設定したときの試料塗布装置50の様子を示す画像である。
【0139】
図15から分かるように、たとえプローブ6に対するCCDカメラ3の撮像方向の角度が75°に設定されている場合においても、CCDカメラ3はワーク9の表面にかなり接近しつつも接触することはなく、しかも、プローブ6の先端よりもCCDカメラ3の先端下部が上側に位置しているため、CCDカメラ3とワーク9が衝突することはない。
【0140】
〔CCDカメラ3とLEDランプ7との位置関係について〕
CCDカメラ3が鮮明な二次像(影あるいは反射像)を撮像するために、CCDカメラ3とLEDランプ7との位置関係には配慮する必要がある。このことを図18〜図20を用いて説明する。
【0141】
図18〜図20は、プローブ6に対するCCDカメラ3の撮像方向の角度を75°、60°、45°に設定したときに、CCDカメラ3が撮像したワーク9の表面に現れる影300とプローブ6とを撮像した画像を示す図であり、(a)〜(e)はそれぞれ、プローブ6の中心に向かって照射するLEDランプ7の照射方向を、CCDカメラ3の撮像方向に対して平面視でプローブ6の回りに左側に110〜130°回転させた方向、左側に約25°回転させた方向、右側に25〜30°回転させた方向、右側に75〜80°回転させた方向、左側に約60°回転させた方向に設定したときの画像を示す図である。なお、各図において、プローブ6の先端とワーク9の表面との距離はいずれも50μmとしている。
【0142】
このうち、図18(b)・(c)、図19(b)・(c)、及び図20(b)・(c)は、プローブ6の中心に向かって照射するLEDランプ7の照射方向を、CCDカメラ3の撮像方向に対して平面視で左側に約25°回転させた方向、右側に25〜30°回転させた方向の領域に配設されたときのワーク9の表面に現れる影300とプローブ6とを撮像した画像を示す図である。各図に示すように、CCDカメラ3に対して小さな角度の範囲内にLEDランプ7を配した場合、ワーク9の表面に現れる影300がプローブ6によって隠された状態となり、プローブ6のエッジとワーク9の表面との間の距離を影300を利用して算出することは困難となる。このような結果に基づき、LEDランプ7は、平面視で、CCDカメラ3の撮像方向に対してプローブ6の中心を通って直交する軸から、CCDカメラ3の側に対して接近した範囲内にある領域に含まれないように配置する必要があることを本願発明者らは見出した。
【0143】
さらに、図18等を考察した結果、LEDランプ7は、平面視で、CCDカメラ3の撮像方向に対してプローブ6の中心を通って直交する軸から、CCDカメラ3の側およびその反対側に対して45°の範囲内に、好ましくは、CCDカメラ3の側およびその反対側に対して30°の範囲内にある領域において配置されている場合に、ワーク9の表面に発生するプローブ6の影300を鮮明に撮像できることを本願発明者らは見出した。
【0144】
また、複数のLEDランプ7を使用する場合、CCDカメラ3が鮮明な影を撮像するためには、LEDランプ7を最大で4個程度の使用に抑えることが好ましい。一方、反射像を撮像する場合は、複数個のLEDランプ7を使用した方が1個の場合と比べて鮮明な正面反射像が得られることを本願発明者らは見出した。
【0145】
ここで、上記説明では、LEDランプ7は、平面視で、CCDカメラ3の撮像方向に対してプローブ6の中心を通って直交する軸から、CCDカメラ3の側に対して接近した範囲内にある領域に含まれないように配置する必要があることを述べた。しかしながら、このことは、プローブ6のエッジとワーク9の表面との間の距離を影を利用して算出する場合に言えることであって、反射像を利用して上記距離を算出する場合には当てはまらない。むしろ、反射像を利用する場合には、LEDランプ7が強い光をプローブ6に当てることで、光の当たった部分の周りが白くぼやけてしまうハレーションに留意しつつ、正面反射を得る場合には有効となる場合がある。
【0146】
なお、図示していないが、プローブ6のエッジとワーク9の表面との間の距離を反射像を利用して算出する場合には、LEDランプ7は、平面視で、CCDカメラ3の撮像方向に対してプローブ6の中心を通って直交する軸から、CCDカメラ3の側に対して、30°から60°の範囲内で、保持部13に保持されることが好ましいことを本願発明者らは確認した。
【0147】
〔距離測定装置100によって得られる効果〕
以下、距離測定装置100によって得られる効果を説明する。
【0148】
上記構成によれば、エッジ特定部101は、CCDカメラ3が撮像したワーク9の表面に現れるプローブ6の二次像とプローブ6との画像において、プローブ6のエッジを特定する。また直線挿入部102は、その画像において、二次像の外縁に沿った第1直線を挿入する。そして、重なり判定部103は、エッジ特定部101が特定したエッジと直線挿入部102が挿入した第1直線との重なりを判定する。
【0149】
つまり、距離測定装置100は、プローブ6とワーク9の表面とが接近するほど、画像上において、エッジと二次像の外縁に沿って挿入された第1直線とが近づき、プローブ6とワーク9の表面とが接触したときに、画像上において、エッジと第1直線とが重なる性質を利用するものである。従って、重なり判定部103がエッジと第1直線とが重なったと判定することにより、プローブ6とワーク9の表面との接触を確認することができる。
【0150】
それゆえ、距離測定装置100は、エッジと第1直線とが重なった時点でプローブ6とワーク9の表面とが接触したものと捉え、その点を基準に、プローブ6の移動量および移動方向に基づき、エッジとワーク9の表面との距離を測定することができる。
【0151】
また、距離測定装置100は、上述したように、プローブ6の二次像をワーク9の表面に発生させて、エッジ特定部101が特定したエッジと二次像の外縁に沿って挿入された第1直線との位置関係から、エッジとワーク9の表面との距離を測定するものである。
【0152】
それゆえ、距離測定装置100は、LAB技術を利用した画像分析方法とは異なり、プローブ6の径の大小に左右されることなくエッジとワーク9の表面との距離を測定することができる。
【0153】
さらに、距離測定装置100では、1以上のLEDランプ7、CCDカメラ3、及びプローブ6が、ワーク9の表面に対して一体に移動可能に保持された構成である。
【0154】
これにより、1以上のLEDランプ7、CCDカメラ3、及びプローブ6の位置関係は固定された状態で維持されるため、撮像する画像内において、プローブ6の位置が測定ごとに移動し、それにより測定結果にばらつきが生じる事態も回避でき、より安定した測定結果をユーザに提供することができる。しかも、その測定方法ゆえに、ワーク9の表面の形状が安定していない場合(例えばワーク9の表面に傾斜が存在する場合)においても、エッジとワーク9の表面との距離を測定することができる。
【0155】
加えて、1以上のLEDランプ7、CCDカメラ3、及びプローブ6が、ワーク9の表面に対して一体に移動可能に保持されているため、距離測定装置100では、ワーク9の表面に対する作業領域の制限がなくなり、巨大なワーク9の表面への対応も可能となる。つまり、従来の試料塗布装置では、ワーク9の表面の側が移動可能に制御されていたため、ワーク9の表面の形状等によっては、同じワーク9の表面に対して複数のプローブ6を利用して複数の試料を塗布することは困難であった。
【0156】
これに対して、距離測定装置100を試料塗布装置に適用した場合には、同じワーク9の表面に対して短時間に複数の異なる試料の塗布が可能となる。それゆえ、距離測定装置100を利用することにより、著しい生産性の向上をユーザにもたらすことができる。
【0157】
さらに、距離測定装置100では、エッジ特定部101が特定したエッジから直線挿入部102が挿入した第1直線までの距離に基づいて、エッジとワーク9の表面との距離を算出する算出手段を備える構成である。
【0158】
上述したように、距離測定装置100では、エッジ特定部101が、CCDカメラ3が撮像したワーク9の表面に現れるプローブ6の二次像とプローブ6との画像において、プローブ6のエッジを特定する。また直線挿入部102が、当該画像において、二次像の外縁に沿った第1直線を挿入する。そして、さらに、距離測定装置100では、距離算出部104が、エッジ特定部101が特定したエッジから直線挿入部102が挿入した第1直線までの距離に基づいて、エッジとワーク9の表面との距離を算出する。
【0159】
具体的には、例えば、エッジとワーク9の表面との実際の距離と、エッジから直線挿入部102が挿入した第1直線までの距離との相関関係を予め準備しておくことにより、距離算出部104は、エッジから第1直線までの距離に基づいて、エッジとワーク9の表面との距離を算出することができる。これにより、エッジとワーク9の表面との距離が自動的に算出される構成を実現することができる。
【0160】
なお、ここでいうエッジから第1直線までの距離とは、エッジを通り、画像内のプローブ6の長手方向に延びた第1直線と直線挿入部102が挿入した第1直線との交点とエッジとの間の距離をいう。
【0161】
さらに、距離測定装置100では、二次像は、プローブ6の影またはプローブ6の反射像である構成である。
【0162】
上記構成によれば、距離測定装置100では、二次像がプローブ6の影またはプローブ6の反射像の何れであっても対応可能である。すなわち、ワーク9の表面の材質等によって、プローブ6の影ではなくプローブ6の反射像が発生した場合においても、距離測定装置100は、エッジとワーク9の表面との距離を測定することができる。
【0163】
さらに、距離測定装置100では、LEDランプ7は、複数存在する構成である。
【0164】
上記構成によれば、距離測定装置100では、プローブ6に光を照射するLEDランプ7が複数存在する。これにより、プローブ6に対して複数の方向から光が照射されるため、CCDカメラ3は、プローブ6のエッジの形状を鮮明に撮像することができる。この結果、距離測定装置100は、プローブ6のエッジとワーク9の表面との距離をより正確に測定することができる。
【0165】
なお、プローブ6に対して複数の方向から光を照射することにより、反射像がより鮮明にワーク9の表面に発生するという特性からも、上記構成は有効であることが分かる。
【0166】
さらに、距離測定装置100では、LEDランプ7は、平面視で、CCDカメラ3の撮像方向に対してプローブ6の中心を通って直交する軸から、CCDカメラ3の側および反対側に対して45°の範囲内にある領域において配置されている構成である。
【0167】
さらに、距離測定装置100では、LEDランプ7は、平面視で、CCDカメラ3の撮像方向に対してプローブ6の中心を通って直交する軸から、CCDカメラ3の側に対して、30°から60°の範囲内にある領域において配置されている構成である。
【0168】
上記構成により、CCDカメラ3は、ワーク9の表面に発生するプローブ6の二次像をより鮮明に撮像することができ、プローブ6のエッジとワーク9の表面との距離をより正確に測定することができる。
【0169】
さらに、距離測定装置100では、上記CCDカメラ3は、外径が7mmのCCDカメラと、焦点距離が15mmの望遠レンズとを組み合わせてなるものである構成である。
【0170】
従来においても、画像を撮像するために用いられるCCDカメラ3はレンズ部分がCマウントとなっているため、CCDカメラ3をワーク9の表面に近づけるということは、垂直方向(重力方向)での設置以外に不可能といってよかった。
【0171】
この点、上記構成とすることにより、100倍前後のズーム率であっても、プローブ6とレンズとの距離を数十ミリ離して観察することが可能であり、かつ、ワーク9の表面に対する作業領域の制限を軽減することができる。しかも、上記構成を備えるCCDカメラ3は、軽量化が実現されているため、プローブ6と同じ駆動軸に搭載することが可能となる。これにより、距離測定装置100は、1以上のLEDランプ7、CCDカメラ3、及びプローブ6が、ワーク9の表面に対して一体に移動可能に保持されているという構成を容易に実現することができる。
【0172】
さらに、距離測定装置100では、CCDカメラ3は、その撮像方向がプローブ6に対して40°から80°、好ましくは50°から65°の範囲内で保持されている構成である。
【0173】
上記構成により、ワーク9の表面に発生するプローブ6の二次像をより鮮明に撮像することができ、プローブ6のエッジとワーク9の表面との距離をより正確に測定することができる。
【0174】
以上のように、距離測定装置100によって種々の効果が期待できる。
【0175】
〔他の実施例(切削装置200)〕
上記説明では、距離測定装置100を備えた試料塗布装置50について説明した。しかしながら、距離測定装置100は、汎用性が高い装置であるため、その他の各種装置に容易に組み込むことができる。その応用例としては、試料採取装置、マイクロ加工装置、切削装置などが挙げられる。これらの装置では、プローブ(あるいはドリル等)とワーク表面との間の距離を正確に測定・制御する必要があるため、本発明に係る距離測定装置100を好適に適用することができる。
【0176】
ここで、距離測定装置100を備えた切削装置200について図21を参照して説明する。図21は、距離測定装置100が組み込まれた切削装置200の概略構成を示す図である。なお、図2等を参照して行った説明と同じ内容についてはその説明を省略する。また、図21では、図2に記載されていたUSBビデオキャプチャー4と、パソコン5、移動装置12等の記載は省略している。しかしながら、図21に記載された各部を、図2の移動装置12に組み込むことにより、切削装置200を実現することができる。
【0177】
切削装置200は、ワーク9の表面に対するマイクロ単位での微細加工を行う装置であり、特にワーク9の表面に対する切削を行う装置である。切削装置200は、レンズ1と、エクステンションチューブ2と、CCDカメラ3と、USBビデオキャプチャー4と、パソコン5と、ドリル201と、LEDランプ7と、LED用照明電源8と、ワーク9と、ワーク用ステージ10と、移動装置12と、保持部13、スピンドル202と、ブラシレスモータ203とを含む構成である。
【0178】
ここで、ドリル201は、自身とワーク9の表面との間の距離を正確に制御されたうえで、対象物に対してドリルによる穴あけ加工(切削)を行うものであり、日進工具株式会社製のマイクロドリルNSMDを使用している。マイクロドリルNSMDは、超微細加工に好適な先端部の外径が最小φ0.01mmのものから存在し、その何れを使用してもよい。また、使用するドリルは他社製品であってもよい。
【0179】
スピンドル202は、株式会社ナカニシ製のNR-2550を使用しており、ブラシレスモータ203は、株式会社ナカニシ製のEM25-5000-J4を使用しており、両者の協働により、ドリル201へ回転力を与えている。
【0180】
上記構成を備えることにより、距離測定装置100を備えた切削装置200は以下の効果を奏することができる。すなわち、距離測定装置100は、ドリル201とワーク9の表面との距離を測定することができ、しかも、ドリル201の径の大小に左右されることなく適用可能である。それゆえ、距離測定装置100を備えた切削装置200は、外径が最小φ0.01mmから最大φ0.10mmまでの細い径のドリルを使用するものであるため、マイクロ単位の微細加工を実現することができる。そして、微細加工の分野においては、日本では数少ない職人への依存度が高いことが問題となっているため、距離測定装置100を備えた切削装置200を使用することにより、素人であっても同程度の微細加工を施すことが可能となる。また同時に、製造業全般への極めて大きな経済的効果が期待できる。
【0181】
〔従来技術の課題に対する対策〕
上述したように、ワーク表面の種類によっては、プローブの先端部分において鏡面現象が発生する(図23参照)。その場合、ワーク9の表面にはプローブ6の虚像が映し出され、距離測定装置100は、プローブ6(あるいはドリル等)とワーク9の表面との間の距離の算出が困難になる。
【0182】
そこで、上記問題への対処として、プローブ6をフッ素系材料によりコーティングするという対策が挙げられる。これは、プローブ6をフッ素系材料によりコーティングすることにより、先端部での鏡面現象を防止することが可能となるためである(図22)。これにより、距離測定装置100は、プローブ6(あるいはドリル等)とワーク9の表面との距離を算出できるようになり、上記問題への解決とすることができる。
【0183】
さらに、従来技術の課題として次のような問題点も指摘した。つまり、特許文献1に記載の発明に対して指摘したとおり、表面アレイに生じるプローブの影の幅を可能な限り細くする必要があり、これを可能にするためには、プローブに対するカメラの角度を可能な限り大きくする必要がある。一方、このようにカメラ角度を大きくすると、表面での変化を観察することが難しくなる。特に、小さな点の状態で試料を塗布する場合には、観察する点の面積が限りなく小さくなり、像倍率が小さい場合には点の存在すら掴めなくなることもある。
【0184】
この点、距離測定装置100では、自身が組み込まれる装置の目的やプローブ6の外径等に応じて、プローブ6に対するCCDカメラ3の角度、または、CCDカメラ3とLEDランプ7との位置関係を適宜調整している。これにより、上記従来技術の課題を克服することができる。
【0185】
〔補足〕
最後に、距離測定装置100の各ブロック、特に距離測定装置100のエッジ特定部101、直線挿入部102、重なり判定部103、距離算出部104は、ハードウェアロジックによって構成してもよいし、次のようにCPUを用いてソフトウェアによって実現してもよい。
【0186】
すなわち、距離測定装置100は、各機能を実現する制御プログラムの命令を実行するCPU(central processing unit)、前記プログラムを格納したROM(read only memory)、前記プログラムを展開するRAM(random access memory)、前記プログラムおよび各種データを格納するメモリ等の記憶装置(記録媒体)などを備えている。そして、本発明の目的は、上述した機能を実現するソフトウェアである距離測定装置100の制御プログラムのプログラムコード(実行形式プログラム、中間コードプログラム、ソースプログラム)をコンピュータで読み取り可能に記録した記録媒体を、前記距離測定装置100に供給し、そのコンピュータ(又はCPUやMPU)が記録媒体に記録されているプログラムコードを読み出し実行することによっても、達成可能である。
【0187】
前記記録媒体としては、例えば、磁気テープやカセットテープ等のテープ系、フロッピー(登録商標)ディスク/ハードディスク等の磁気ディスクやコンパクトディスク−ROM/MO/MD/デジタルビデオデイスク/コンパクトディスク−R等の光ディスクを含むディスク系、ICカード(メモリカードを含む)/光カード等のカード系、あるいはマスクROM/EPROM/EEPROM/フラッシュROM等の半導体メモリ系などを用いることができる。
【0188】
また、距離測定装置100を通信ネットワークと接続可能に構成し、前記プログラムコードを通信ネットワークを介して供給してもよい。この通信ネットワークとしては、特に限定されず、例えば、インターネット、イントラネット、エキストラネット、LAN、ISDN、VAN、CATV通信網、仮想専用網(virtual private network)、電話回線網、移動体通信網、衛星通信網等が利用可能である。また、通信ネットワークを構成する伝送媒体としては、特に限定されず、例えば、IEEE1394、USB、電力線搬送、ケーブルTV回線、電話線、ADSL回線等の有線でも、IrDAやリモコンのような赤外線、Bluetooth(登録商標)、802.11無線、HDR、携帯電話網、衛星回線、地上波デジタル網等の無線でも利用可能である。なお、本発明は、前記プログラムコードが電子的な伝送で具現化された、搬送波に埋め込まれたコンピュータデータ信号の形態でも実現され得る。
【0189】
本発明は上述した実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能である。すなわち、請求項に示した範囲で適宜変更した技術的手段を組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【産業上の利用可能性】
【0190】
本発明は、プローブの二次像をワーク表面に発生させて、その二次像とプローブの先端部との位置関係から、プローブの先端部とワーク表面との距離を測定することが可能な距離測定装置に適用され、とくに、試料塗布装置、試料採取装置、マイクロ加工装置、切削装置などに好適に適用することができる。
【符号の説明】
【0191】
1 レンズ(撮像装置)
2 エクステンションチューブ
3 CCDカメラ
3a カメラ本体(撮像装置)
3b カメラアンプ(撮像装置)
4 USBビデオキャプチャー
5 パソコン
6 プローブ
6a プローブの反射像
7 LEDランプ(光源)
8 LED用照明電源
9 ワーク
10 ワーク用ステージ
11 微量塗布装置
12 移動装置
12a X軸アクチュエータ
12b Y軸アクチュエータ
12c Z軸アクチュエータ
12d 駆動制御部
13 保持部
40 制御部
50 試料塗布装置
60 表示装置
61 表示制御部
62 表示部
100 距離測定装置
101 エッジ特定部(特定手段)
102 直線挿入部(挿入手段)
103 重なり判定部(判定手段)
104 距離算出部(算出手段)
200 切削装置
201 ドリル
202 スピンドル
203 ブラシレスモータ
300 影
L1 第1直線
L2 第2直線
L3 第3直線
【特許請求の範囲】
【請求項1】
光源からプローブに光を照射することによってワーク表面に現れる二次像と上記プローブとを撮像装置によって撮像し、その撮像装置が撮像した画像を用いて上記プローブの先端部と上記ワーク表面との距離を測定する距離測定装置において、
上記画像における上記先端部を特定する特定手段と、
上記画像における上記二次像の外縁に沿った直線を上記画像上に挿入する挿入手段と、
上記特定手段が特定した上記先端部と上記挿入手段が挿入した上記直線との重なりを判定する判定手段と、を備え、
1以上の上記光源、上記撮像装置、及び上記プローブが、上記ワーク表面に対して一体に移動可能に保持されていることを特徴とする距離測定装置。
【請求項2】
上記特定手段が特定した上記先端部から上記挿入手段が挿入した上記直線までの距離に基づいて、上記先端部と上記ワーク表面との距離を算出する算出手段を備えることを特徴とする請求項1に記載の距離測定装置。
【請求項3】
上記二次像は、上記プローブの影または上記プローブの反射像であることを特徴とする請求項1または2に記載の距離測定装置。
【請求項4】
上記光源は、複数存在することを特徴とする請求項1から3の何れか1項に記載の距離測定装置。
【請求項5】
上記光源は、平面視で、上記撮像装置の撮像方向に対して前記プローブの中心を通って直交する軸から、上記撮像装置の側およびその反対側に対して45°の範囲内にある領域において配置されていることを特徴とする請求項1から4の何れか1項に記載の距離測定装置。
【請求項6】
上記光源は、平面視で、上記撮像装置の撮像方向に対して前記プローブの中心を通って直交する軸から、上記撮像装置の側に対して、30°から60°の範囲内にある領域において配置されていることを特徴とする請求項1から4の何れか1項に記載の距離測定装置。
【請求項7】
上記撮像装置は、その撮像方向が上記プローブに対して40°から80°、好ましくは50°から65°の範囲内にある領域において配置されていることを特徴とする請求項1から6の何れか1項に記載の距離測定装置。
【請求項8】
光源からプローブに光を照射することによってワーク表面に現れる二次像と上記プローブとを撮像装置によって撮像し、その撮像装置が撮像した画像を用いて上記プローブの先端部と上記ワーク表面との距離を測定する距離測定方法であって、
上記画像における上記先端部を特定する特定ステップと、
上記画像における上記二次像の外縁に沿った直線を上記画像上に挿入する挿入ステップと、
上記特定ステップにて特定された上記先端部と上記挿入ステップにて挿入された上記直線との重なりを判定する判定ステップと、を含むことを特徴とする距離測定方法。
【請求項9】
光源からプローブに光を照射することによってワーク表面に現れる二次像と上記プローブとを撮像装置によって撮像し、その撮像装置が撮像した画像を用いて上記プローブの先端部と上記ワーク表面との距離を測定する距離測定プログラムであって、
上記画像における上記先端部を特定する特定ステップと、
上記画像における上記二次像の外縁に沿った直線を上記画像上に挿入する挿入ステップと、
上記特定ステップにて特定された上記先端部と上記挿入ステップにて挿入された上記直線との重なりを判定する判定ステップと、をコンピュータに実行させるための距離測定プログラム。
【請求項10】
請求項9に記載の距離測定プログラムを記録したコンピュータ読み取り可能な記録媒体。
【請求項1】
光源からプローブに光を照射することによってワーク表面に現れる二次像と上記プローブとを撮像装置によって撮像し、その撮像装置が撮像した画像を用いて上記プローブの先端部と上記ワーク表面との距離を測定する距離測定装置において、
上記画像における上記先端部を特定する特定手段と、
上記画像における上記二次像の外縁に沿った直線を上記画像上に挿入する挿入手段と、
上記特定手段が特定した上記先端部と上記挿入手段が挿入した上記直線との重なりを判定する判定手段と、を備え、
1以上の上記光源、上記撮像装置、及び上記プローブが、上記ワーク表面に対して一体に移動可能に保持されていることを特徴とする距離測定装置。
【請求項2】
上記特定手段が特定した上記先端部から上記挿入手段が挿入した上記直線までの距離に基づいて、上記先端部と上記ワーク表面との距離を算出する算出手段を備えることを特徴とする請求項1に記載の距離測定装置。
【請求項3】
上記二次像は、上記プローブの影または上記プローブの反射像であることを特徴とする請求項1または2に記載の距離測定装置。
【請求項4】
上記光源は、複数存在することを特徴とする請求項1から3の何れか1項に記載の距離測定装置。
【請求項5】
上記光源は、平面視で、上記撮像装置の撮像方向に対して前記プローブの中心を通って直交する軸から、上記撮像装置の側およびその反対側に対して45°の範囲内にある領域において配置されていることを特徴とする請求項1から4の何れか1項に記載の距離測定装置。
【請求項6】
上記光源は、平面視で、上記撮像装置の撮像方向に対して前記プローブの中心を通って直交する軸から、上記撮像装置の側に対して、30°から60°の範囲内にある領域において配置されていることを特徴とする請求項1から4の何れか1項に記載の距離測定装置。
【請求項7】
上記撮像装置は、その撮像方向が上記プローブに対して40°から80°、好ましくは50°から65°の範囲内にある領域において配置されていることを特徴とする請求項1から6の何れか1項に記載の距離測定装置。
【請求項8】
光源からプローブに光を照射することによってワーク表面に現れる二次像と上記プローブとを撮像装置によって撮像し、その撮像装置が撮像した画像を用いて上記プローブの先端部と上記ワーク表面との距離を測定する距離測定方法であって、
上記画像における上記先端部を特定する特定ステップと、
上記画像における上記二次像の外縁に沿った直線を上記画像上に挿入する挿入ステップと、
上記特定ステップにて特定された上記先端部と上記挿入ステップにて挿入された上記直線との重なりを判定する判定ステップと、を含むことを特徴とする距離測定方法。
【請求項9】
光源からプローブに光を照射することによってワーク表面に現れる二次像と上記プローブとを撮像装置によって撮像し、その撮像装置が撮像した画像を用いて上記プローブの先端部と上記ワーク表面との距離を測定する距離測定プログラムであって、
上記画像における上記先端部を特定する特定ステップと、
上記画像における上記二次像の外縁に沿った直線を上記画像上に挿入する挿入ステップと、
上記特定ステップにて特定された上記先端部と上記挿入ステップにて挿入された上記直線との重なりを判定する判定ステップと、をコンピュータに実行させるための距離測定プログラム。
【請求項10】
請求項9に記載の距離測定プログラムを記録したコンピュータ読み取り可能な記録媒体。
【図1】


【図2】
【図21】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
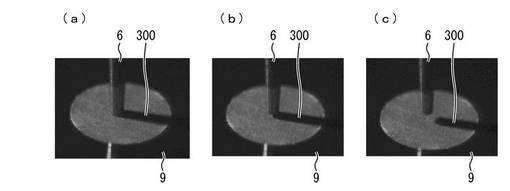
【図15】

【図16】
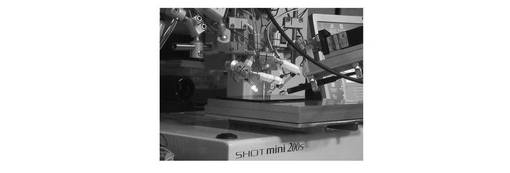
【図17】
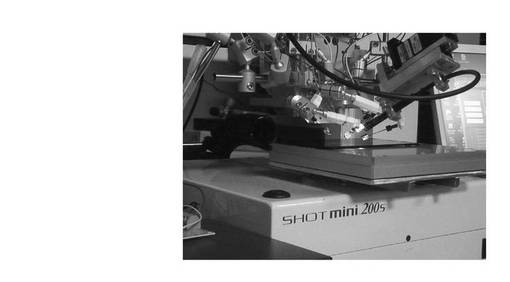
【図18】
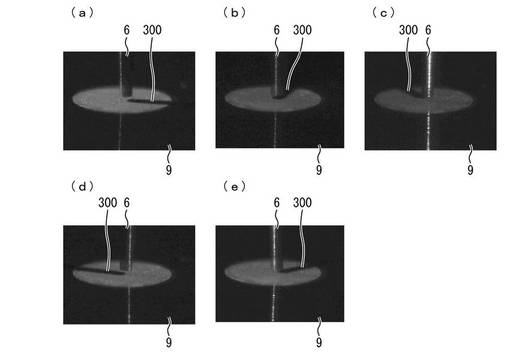
【図19】
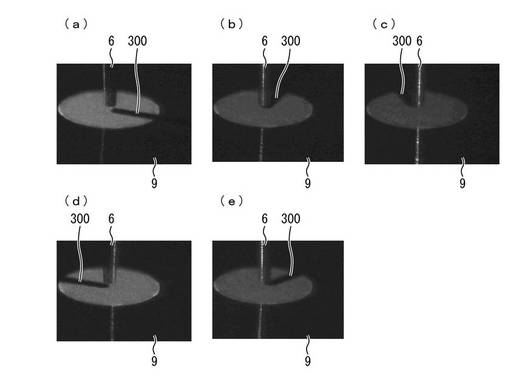
【図20】
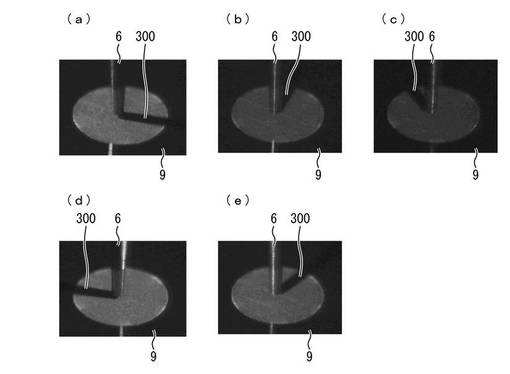
【図22】
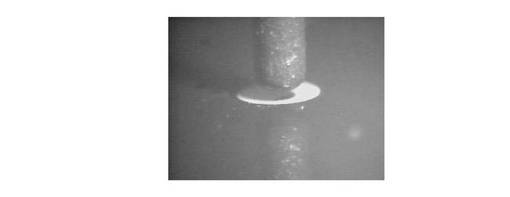
【図23】
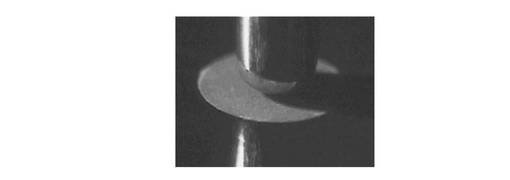
【図2】
【図21】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図22】
【図23】
【公開番号】特開2011−80952(P2011−80952A)
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願番号】特願2009−235185(P2009−235185)
【出願日】平成21年10月9日(2009.10.9)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 「第57回質量分析総合討論会(2009)講演要旨集」 発行日 2009年5月1日 発行所 日本質量分析学会
【出願人】(504176911)国立大学法人大阪大学 (1,536)
【出願人】(308025347)MSI.TOKYO株式会社 (1)
【Fターム(参考)】
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願日】平成21年10月9日(2009.10.9)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 「第57回質量分析総合討論会(2009)講演要旨集」 発行日 2009年5月1日 発行所 日本質量分析学会
【出願人】(504176911)国立大学法人大阪大学 (1,536)
【出願人】(308025347)MSI.TOKYO株式会社 (1)
【Fターム(参考)】
[ Back to top ]