
距離測定装置及びライン構造体中の距離を求める方法
本発明は、ライン構造体中の反射要素とライン構造体の端部に設けられた電磁波のための結合箇所との間の距離を求める方法及びこの方法を実施する距離測定装置(2)であって、距離測定装置が、送受信装置を有し、送受信装置は、結合箇所のところに設けられていて、電磁波をライン構造体中に結合すると共に反射要素で反射された電磁波をライン構造体から結合解除するために送受信装置をライン構造体に同軸誘導結合するライン移行部(6)を備え、距離測定装置が、結合箇所と反射要素との間の距離を結合された電磁波と結合解除された電磁波の位相差から求める評価装置を更に有することを特徴とする距離測定装置に関する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、距離測定装置及び距離を計算する方法に関する。
【背景技術】
【0002】
例えば、とりわけ、空気圧又は油圧シリンダを備えた線形(直線)駆動装置のピストン位置を検出する従来型距離測定装置が用いられている。シリンダ上におけるピストン位置の検出は、作動中、離散的であり、即ち、とびとびの箇所のところで行われると共に連続しており、即ち、一定である場合がある。
【0003】
ピストン位置の離散的判定は、一般に、プロセス制御(例えば、SPS)へのピストン運動の実行又は完了を報告し、かくして、例えば、次の手順ステップを開始することができるようにするために必要である。
【0004】
この目的のため、磁界に感応するセンサ又は検出装置が主として用いられており、かかるセンサ又は検出装置は、シリンダピストンに設けられた永久磁石の磁界を検出する。これら形式のセンサは、主として、磁界に感応するセンサの形態をしており、リードスイッチ、磁気抵抗(MR)スイッチ、巨大磁気抵抗(GMR)スイッチ、ホールスイッチ又は磁石誘導近接スイッチと呼ばれている。本発明の分野において用いられるセンサは、ピストンシリンダのシリンダ管の外部に取り付けられる。ピストンがこれらセンサのうちの1つの検出範囲に入った場合、この1つのセンサは、シリンダ管中のシリンダピストンの存在を認識する。
【0005】
他方、別の位置を検出する場合、センサは、これに対応して、機械的に調節されなければならない。したがって、更に検出されるべきあらゆる位置に関し、別のセンサを関連の追加の材料費、取り付け費、調節費及び設置費をかけて取り付けなければならない。これは、一般に、顧客の構内で行われる。多くの場合、シリンダは、この場合、既に接近がしにくい状態で取り付けられており、外部に取り付けられた磁気スイッチを機械的にずらすことによるスイッチ距離の調節は、もはや可能ではない。
【0006】
さらに、追加の設置空間がこれら外部取り付け型センサに必要である。センサの接近性及び頑丈さを保証することができるようにするため、構造的な複雑さの増大が必要な場合が多い。センサの外部取り付けは、満足のゆくものではない。というのは、かかるセンサは、外部からの外来性影響によって満たされる場合があるからである。シリンダへのセンサの取り付け具が破断する場合があり、センサは、床に落下する場合がある。この結果、誤差が信号として知らされ、組み立てラインが止まる場合がある。空気圧駆動装置に関する全作動停止の50%は、上述したような仕方で起こる。
【0007】
連続ピストン位置測定の場合、電位差的に、磁気抵抗的に又はLVDT(線形可変差動変圧器)原理に従って機能する測定システムが常用されている。これらシステムでは、ピストン位置は、主として、アナログ電圧信号として連続的に出力される。LVDT原理に従うセンサは、常時、スイッチオン時に基準経路を必要とする。また、増分経路測定法がこれらシステムの補完手段として知られている。これらシステムは、例えば、ピストンロッドの磁気コード化によって実現され、従って、経路の相対的測定に使用できるにすぎない。加うるに、ピストンロッドが伸張すると、切りくずがピストンロッドに吸い付けられ、これら切りくずは、次に、ピストンロッドが引っ込められたときにシールを破壊する。磁気抵抗及び電位差型経路測定システムは、中空に穿孔されるべきピストンロッドの外部に又はこの内部に取り付けられる。中空ピストンロッドは、駆動装置を弱体化させ、外部取り付けにより、相当な人員・機材等の配備上の複雑さが生じる。
【0008】
シリンダ内に組み込むことができる連続ピストン位置判定技術も離散的ピストン位置判定技術も存在せず、或いは、これらを設けたとしても、相当な構造上の複雑さ及び関連の高い費用が伴う。相当な構造的複雑さは、上述の十分に確立したセンサ原理の全てをこれに対応したシリンダ長さに適合させなければならないという事実に起因して生じる。というのは、かかる原理の検出範囲は、短すぎるからである。
【0009】
国際出願PCT/EP03/00894号明細書は、空気圧/油圧作動式シリンダチャンバ内へのマイクロ波センサの組み込みを記載している。この手段の利点は、センサが中央に位置決めされることであり、この空間は、空気圧端部衝撃緩衝に必要な場合が多い。
【0010】
別の利点は次の通りである。
‐ピストンは、これが考えられる限り最も理想的な高い周波数の標的を表示するよう設計されなければならないこと、
‐センサの測定精度が結合プローブの適合に実質的に依存しているということ、
‐測定原理は、ピストンロッドが存在していないシリンダの半部内でのみ機能すること、
‐誘電保持システムがアンテナの取り付けに必要であること。
【0011】
以下に説明するセンサ設計例では、直線駆動装置中への経路センサの遠くに及ぶ組み込みが考慮に入れなければならない直接的組み込みと関連した上述の欠点を生じないで可能である。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】国際出願PCT/EP03/00894号明細書
【発明の概要】
【発明が解決しようとする課題】
【0013】
したがって、本発明の目的は、上述の欠点を解決すると共に連続的な、従って、離散化可能な距離測定、簡単な取り扱い及び広汎な可能な使用を可能にする距離測定装置及び距離の計算方法を提供することにある。
【課題を解決するための手段】
【0014】
この目的は、請求項1の特徴を有する装置及び請求項27の特徴を有する方法によって達成される。
【0015】
シリンダ内におけるピストン位置の判定のための本発明の距離測定装置は、以下の特性を有している。
‐特に高い精度での連続絶対距離測定が可能であること。
‐シリンダカバー内への送受信装置及び分析エレクトロニクスの全体的組み込みが可能であり、即ち、外部に取り付けられる部品が存在しないこと。さらに、シリンダの空気圧関連部分、例えばピストン、端部衝撃緩衝、ピストンロッド又は空気供給装置に対する機械的改造が不要であること。
‐距離測定装置を既存の標準寸法がそのままの状態で使用できること。
‐スイッチ距離を電子インターフェイスによって外部から調節できるはずであること(ティーチイン能力)。
‐シリンダ長さ(X長さ能力)とは無関係に万能的に使用できるセンサ(送受信装置)。
‐測定結果をシリンダ内の圧力、油及び湿度とは無関係に得ることができること。
‐十分に定められた全てのシリンダ直径用のセンサ(送受信装置)を使用できること。
【0016】
本発明によれば、距離測定装置及び距離の計算方法を利用でき、検出装置は、高い周波数の送受信装置、同軸導体からのシリンダの形態をしているのが良い中空導体中へのクロスオーバ、反射標的及び分析ユニットを有する。送受信装置は、波を放射してこれら波を受け取ることによって中空導電性又はライン構造体内における比距離を測定するのに役立つ。
【0017】
さらに、本発明によれば、導電性構造体中の反射体と導電性構造体の端部に設けられた電磁波のための射出箇所との間の距離を計算する距離測定装置であって、この距離測定装置が、送受信装置を有し、送受信装置は、射出箇所のところに設けられていて、電磁波を導電性構造体中に射出すると共に反射体で反射された電磁波を導電性構造体から結合解除するために送受信装置を導電性構造体に同軸誘導結合する導通クロスオーバを備え、この距離測定装置が、射出箇所と反射体との間の距離を射出された電磁波と結合解除された電磁波の位相差から計算する分析装置を更に有することを特徴とする距離測定装置が提供される。
【0018】
本発明によれば、反射標的までの導電性構造体の長さを測定する方法が提供される。本発明の方法により提供される伝送信号は、導電性構造体中に供給され、反射標的で反射され、そして再び入力又は供給(フィード)システムを介して受け取られる。このように、誘導中空導体クロスオーバにより定められる射出箇所と反射標的との間の距離の測定が実施される。この距離は、この場合、電磁波の互いに異なる周波数及び偏波を含む伝送信号と受信信号の位相差を測定することにより測定される。
【0019】
本発明によれば、導電性構造体内の反射体と導電性構造体の端部のところに設けられた電磁波のための射出箇所との間の距離を計算する方法であって、この方法が、射出箇所のところで同軸誘導導通クロスオーバを介して電磁波を導電性構造体中に射出するステップと、
‐反射体で反射された電磁波を導通クロスオーバにより導電性構造体から結合解除するステップと、
‐射出箇所と反射体との間の距離を射出された電磁波と結合解除された電磁波との位相差から計算するステップとを有することを特徴とする方法が提供される。
【0020】
本発明は、特に以下の利点を有する。
‐センサシステムのコンポーネントの全ては、小型であるよう構成されており、従って、シリンダ内への組み込みに必要な再構成措置がほとんどなく又はほんの僅かであるようになっている。
‐検出装置は、全体として、空気圧シリンダの端カバー内に収容可能である。
‐したがって、本発明の距離測定装置の構造全体は、外部検出装置を取り付ける可能性をなしですますことにより清浄で滑らかな設計を有し、従って、これは、外観に影響を及ぼさない。
【0021】
従属形式の請求項は、本発明の装置及び本発明の方法の有利な別の改造例を構成している。
【0022】
有利には、導電性構造体は、中空シリンダの形態をしている。有利な別の改造例では、中空シリンダは、空気圧又は油圧シリンダの形態をしている。有利には、ピストンが中空シリンダ内に設けられ、このピストンは、反射体として働く。
【0023】
有利な別の改造例によれば、導電性構造体中への電磁波の射出は、モノモーダル電磁波の形態で1MHz〜100GHzの周波数範囲で起こる。有利には、導電性構造体中への電磁波の射出は、H11若しくはE01モードで又はTEMモードでは同軸導電性構造体、特にシリンダ内に連続的に形成されたピストンで起こる。
【0024】
E01モードで直線偏波電磁波を発生させるため、有利には、同軸波を導通クロスオーバの導電性の誘導モード変換器又は導通クロスオーバの2つ若しくは4つの導電性誘導モード変換器によって導電性構造体中に同相で射出する。
【0025】
水平又は垂直偏波電磁波を導電性構造体中に射出するためには、導通クロスオーバは、有利な別の改造例では、導電性誘導モード変換器を有する。
【0026】
有利には、導通クロスオーバは、端部の付近に設けられた円の円形経路にわたって互いに対して180°だけずらされた状態で配置されている2つの導電性誘導モード変換器を有し、この変換器により、互いに対して180°だけ位相ずれした直線偏波電磁波を導電性構造体中に射出することができる。
【0027】
有利な別の改造例では、導通クロスオーバは、端部の付近に設けられた円の円形経路にわたって互いに対して90°だけずらされた状態で配置されている2つの導電性誘導モード変換器を有し、この変換器により、垂直又は水平偏波電磁波を導電性構造体中に射出することができる。
【0028】
有利な別の改造例によれば、導通クロスオーバは、端部の付近に設けられた円の円形経路にわたって互いに対して90°だけずらされた状態で配置されている4つの導電性誘導モード変換器を有し、互いに対して180°だけ位相ずれした垂直偏波電磁波を互いに対して180°だけずらされた2つのモード変換器により導電性構造体中に平行に射出することができ、互いに対して180°だけ位相ずれした水平偏波電磁波を互いに対して180°だけずらされた2つのモード変換器によって導電性構造体中に平行に射出することができ、これらモード変換器は、それぞれ、垂直偏波電磁波のためのモード変換器に対して90°だけずらされている。
【0029】
有利には、導通クロスオーバは、端部の付近に設けられた円の円形経路にわたって互いに対して90°だけずらされた状態で配置された2つの導電性誘導モード変換器を有し、この変換器により、互いに対して90°又は120°だけ位相ずれした円偏波電磁波を導電性構造体中にそれぞれ射出することができる。また、円偏波電磁波を90°だけずらされた4つのモード変換器により発生させることができる。しかしながら、モード変換器に例えば反時計回りの方向に送られる信号は、次に、それぞれ、互いに対して90°だけ位相ずれする。
【0030】
有利な別の改造例では、各モード変換器は、機械的階段の形態をしている。有利な別の改造例によれば、機械的階段は、導電性構造体上での反射体の方向におけるステップ高さが減少した状態で配置されている。有利には、階段は各々、2つ、3つ、4つ又はそれ以上のステップを備えた状態で具体化されている。
【0031】
送受信装置を導電性構造体に結合するため、導通クロスオーバは、有利には、各モード変換器とモード変換器の機械的階段の最も高いステップの後面中に導電性構造体の端部上で挿入された同軸内側導体との間に設けられた接触部を有する。有利には、機械的階段の最も高いステップの後面と端部の形態をした導電性構造体のカバー後壁との間には、数ミリメートルの距離が空けられている。
【0032】
円偏波の場合、反時計回り又は時計回りの電磁波を水平又は垂直偏波電磁波に変換するため、送受信装置は、有利には、各モード変換器について、分岐線カプラと、分岐線カプラの下流側に設けられていて、3dB結合及び180°の位相回転がなされたカプラとを有する。このように、全反射及び円形回転方向への関連の変化、即ち、反時計回りの方向から時計回りの方向へ又は時計回りの方向から反時計回りの方向への関連の変化の際に反射体で反射された円偏波電磁波の標的エコーは、全反射の作用を受けない干渉エコーから分離可能である。
【0033】
水平又は垂直偏波電磁波を同時に検出するため、有利な別の改造例によれば、送受信装置は、2チャンネル受信器を有する。
【0034】
有利には、少なくとも1つの外側ピストン及び少なくとも1つの内側ピストンを備えた多ピストンシステムのための誘導モード変換器は、外側ピストン又は内側ピストンと射出箇所との間の距離を検出するために外側ピストンにより反射された電磁波と内側ピストンにより反射された電磁波の両方を結合解除するよう設計されている。
【0035】
射出された電磁波のスイングイン経路を一モードで短くするため、有利には、反射体とモード変換器との間に導電性構造体の内周部全体にわたり好ましくはレキサン、PPS40又はテフロン(登録商標)で作られた誘電ディスクがモード変換器に隣接して設けられる。
【0036】
有利な別の改造例によれば、誘電ディスクは、中心が内側管を備え、減衰ピストンが内側管中に突入することができるようになっている。有利には、内側管は、金属で作られている。
【0037】
導通クロスオーバの方向におけるピストンの運動を制限するため、導電性構造体中には、2つの四分円リングとして導電性構造体と協働するピストン停止部が設けられている。有利な別の改造例によれば、誘電ディスクは、ピストン停止部として働く。
【0038】
有利な別の改造例によれば、距離測定装置は、導電性構造体の終端部、端カバー又は端部の形態をしており、従って、中空シリンダの形態をした導電性構造体を特に簡単には、距離測定装置を備えた状態でコスト及び時間を特に大幅に節約した状態で提供できる。中空シリンダを改造するため、ケーブル終端部又は端部として作用するピストンと反対側に位置する後壁だけを距離測定装置で置き換える必要があるに過ぎず、そのための労力は極めて少ない。もしそうでなければ、導電性構造体又は中空シリンダに対する変更及び/又は改造は不要である。
【0039】
導電性構造体及び/又は距離測定装置に対する改造、保守及び修理並びに導電性構造体に取り付けられている距離測定装置の交換のためには、導電性構造体への距離測定装置の取り付け具を提供して距離測定装置を導電性構造体から取り外すことができるようにするのが有利である。このようにすると、距離測定装置を完全に製造して試験し、その後、中空シリンダへの最終取り付けを行うと共に/或いは出荷を行うことができる。
【0040】
距離測定装置を導電性構造体内に保持するためには、導電性構造体中に導入された距離測定装置と協働する棚部を停止部として導電性構造体に反射体の方へ向いた側に設けて距離測定装置を導電性構造体中に棚部までしか導入することができないようにすることが有利である。
【0041】
距離測定装置が導体終端部として確実に導電性構造体内に位置したままであるようにするために且つ距離測定装置が導電性構造体内で滑らないようにするためには、導電性構造体内に反射体から遠ざかる方向に向いた側にクランプリングを設けることが有利である。
【0042】
有利な別の改造例によれば、クランプリングは、導電性構造体に設けられていて、クランプリングが部分的に挿入される切欠きによって導電性構造体と協働する。さらに、クランプリングは、有利には、導電性構造体内における反射体から遠ざかる方向に向いた側での距離測定装置の滑りが回避されるよう寸法決めされる。
【0043】
有利な別の改造例では、距離測定装置は、導電性構造体内で、少なくとも1本のロックピン及び/又は少なくとも1本のねじにより保持される。有利な別の改造例では、ロックピン及び/又はねじは、導電性構造体に設けられたボア穴によって導電性構造体と協働すると共に距離測定装置に設けられたボア穴によって距離測定装置と協働する。
【0044】
距離測定装置を導電性構造体内に特に確実に保持するため、多数本のロックピン及び/又は多数本のねじが設けられるのが有利であり、これらロックピン及び/又はねじは、それぞれ、導電性構造体及び/又は距離測定装置のボア穴内に挿入され、或いは、導電性構造体及び/又は距離測定装置に螺合される。
【0045】
中空シリンダの形態をした導電性構造体では、多数本のロックピン及び/又は多数本のねじが有利には中空シリンダのジャケットに続く円形経路にわたり実質的に等間隔をおいて分布して配置された状態で設けられる。
【0046】
ピストンの反射体と距離測定装置との間の導電性構造体中のキャビティを密封するため、少なくとも1つのシール、有利には2つのシールが、距離測定装置と導電性構造体との間に設けられ、シールのうちの一方は、圧力シールとして働き、他方のシールは、高周波シールとして働く。有利な別の改造例では、シールは、密封リングの形態をしている。
【0047】
有利な別の改造例によれば、互いに異なる伝送周波数の伝送信号が電磁波と一緒に射出される。例えば、広い測定範囲をカバーするため、伝送周波数は、有利には、伝送周波数相互間の差が絶対値から小さい、例えば1%差であるように選択される。例えば高い干渉抵抗レベルを達成するため、伝送周波数は、有利な形態によれば、伝送周波数相互間の差が絶対値で考えて大きく、例えば20%差であるように選択される。
【0048】
有利には、電磁波により放射された伝送信号は、連続して放出される。有利な一実施形態によれば、CW信号として電磁波を含む伝送信号が射出される。
【0049】
有利な別の改造例では、垂直及び水平偏波を含む電磁波が並行して分析される。
【0050】
伝送器は、電磁波を同軸ケーブルにより中空導体中に誘導的に供給するVCO(電圧制御発信器)から成る。伝送出力の一部は、抵抗的に結合解除され、局部発振器としての受信ミキサに利用可能となる。同様に、受信信号は、カプラにより伝送チャネルから結合解除される。というのは、供給構成が伝送器と受信器の両方に用いられるからである。かくして、同軸波は、中空導体を誘導的に結合することによりモード変換器によってH11波型の中空導体中に変換される。接触は、例えばボア穴中への押し込みによって同軸内側導体がモード変換器のフェース側に取り付けられることにより起こる。金属製カバー端壁とモード変換器との間にはミリメートル範囲の空間が存在する。多くのモード変換器によって、波の異なる偏波及び高いモードによる波の刺激を次のように判定することができる。
【0051】
1つのモード変換器によるH11‐直線偏波:しかしながら、この非対称誘導性同軸中空導体による供給により、波形式11の波だけが刺激されるだけでなく、周期性に続く全てのHモードが刺激される。
【0052】
しかしながら、中空導体の外径に関するあらかじめ指定された基本的条件(比制限周波数に依存した中空導体モードの非周期的減衰)に基づいて、進んだ対応の距離の後、H11モードが伝搬してエネルギーを運ぶことができるに過ぎない(スイングイン特性)。
【0053】
2つのモード変換器によるH11‐直線偏波:180°だけ鏡像関係にある別の誘導同軸中空導体による供給を追加することにより、対称刺激が生じ、刺激モードの数及び進んだ所用の距離が少なくなる。
【0054】
しかしながら、同軸導電性システム内での180°だけ位相ずれした2つの信号の射出は、この刺激の基本的な必要条件である。
【0055】
H11中空導体波の直交性を用いることにより:H11x‐H117:即ち、H11x及びH11y形式の2つの同一の中空導体波の理論的に完全に結合解除された伝搬を用いることにより、システム内に冗長第2信号を用いることができる。このようにすると、動作上の信頼性及び更に測定精度を増大させることができる。
【0056】
H11波型の単純な使用の場合と同様、二重使用、即ち、各モード変換器を備えたH11x‐H11y‐直線偏波(垂直及び水平)及び2つの各モード変換器を備えたH11x‐H117‐直線偏波(垂直及び水平)では、簡単な又はデュアルモード変換器も又使用できる。
【0057】
円偏波:しかしながら、H11x及びH117波型の直交性に起因して、二重直線偏波の使用に加えて、円偏波の使用も可能である。円偏波は、90°だけ位相ずれした信号により2つの直交波形式を刺激することにより生じる。しかしながら、これに加えて、刺激は又、90°だけ回転させた第2の射出によって生じさせる必要がある。
【0058】
円刺激を用いることにより、次の動作状態が可能である。
‐それぞれ2つのモード変換器を備えたH11x‐H11y円偏波(モード変換器が90°だけ円形にオフセットした状態で配置されている)。
‐それぞれ4つのモード変換器を備えたH11x‐H11y円偏波(モード変換器は、互いに対して90°だけそれぞれずらされた円の円形経路にわたり配置されている)。
【0059】
E01波型を用いることによる追加の動作モード:上述したように、基本的には、同軸中空導体モード変換器を用いることにより全てのモードを刺激することが可能である。ただし、全てのモードは、この同軸中空導体モード変換器が基本条件の対応の保証によって伝搬可能であることを条件とする。
【0060】
システム内の基本条件(中空導体の直径)及び対応の刺激信号を変化させることにより使用できる別の波型は、E01波型である。
【0061】
刺激して伝搬させる場合、同じことは、考慮対象のH11波型についても当てはまる。
【0062】
以下の構成によりE01波型を刺激することができる。
‐1つのモード変換器によるE01偏波、
‐2つのモード変換器によるE01偏波(90°回転、同相刺激)、
‐2つのモード変換器によるE01偏波(180°回転、同相刺激)、
‐4つのモード変換器によるE01偏波(4×90°回転、同相刺激)。
【0063】
さらに、中空導体直径がE01制限周波数に適合される一般的な基本必要条件が当てはまる。
【0064】
連続ピストンロッドを備えたシリンダに関する動作モード:連続ピストンロッドを備えたシリンダの場合、TEMモードが好ましくは刺激される。H11モードの刺激も又可能である。この形態では、提供される誘導モード変換器も又使用できる。
【0065】
モード変換器の帯域幅及び改造:モード変換器の帯域幅は、対応の波型の互いの適合の質によって定められる。
【0066】
適合は、インピーダンス変換によって達成される。変換のこの帯域幅は、用いられる変換ステップの数により制御可能である(機械的に:階段型誘導中空導体カップリングの数)。変換ステップの数は、この場合対応したモード変換器の全長を生じさせる。しかしながら、或る特定の条件下では、変換ステップにより十分な適合を達成することも可能である。
【0067】
誘電窓(ディスク)によるスイングイン経路の短縮化:しかしながら、中空導体の外径に関するあらかじめ指定された基本的条件(比制限周波数に依存した中空導体モードの非周期的減衰)に基づいて、進んだ対応の距離の後、H11モードが伝搬してエネルギーを運ぶことができるに過ぎない(スイングイン特性)。1よりも非常に大きな値の誘電性の数のディスクの形態をした誘電窓がモード変換器に直接続く場合、進むこの距離をそれに対応して短縮することができる。PPS40、レキサン又はテフロン(登録商標)を好ましくは、材料として使用することができる。誘電ディスクは、それと同時に、これが機械的ピストン停止部として働くよう設計されるのが良い。
【0068】
空気圧端部衝撃緩衝:誘電ディスクは、これがハット状形態をとるよう形作られるのが良い。中間部の膨らみは、ピストンロッドへの付属物として取り付けられる減衰ピストンを引っ込めることができるようにする上で適している。それと同時に、ピストンの運動軸線に沿って動くことができる密封リングが提供される。減衰ピストンを保持する管も又、金属で作られるのが良い。この条件下においても、電磁波の射出が可能である。
【0069】
機械的端停止部:また、二重シェル形四分円構成をピストンのための機械的端停止部として使用することができる。
【0070】
例示の実施形態
以下において、本発明の例示の実施形態を図面により詳細に説明する。
【図面の簡単な説明】
【0071】
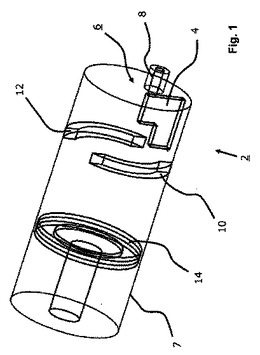
【図1】モード変換器を備えた導通クロスオーバがシリンダに取り付けられた状態の距離測定装置の一実施形態の斜視図である。
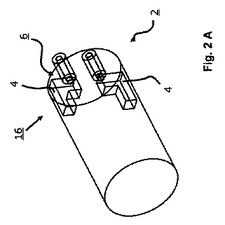
【図2A】2つの2段モード変換器を備えた導通クロスオーバがシリンダに取り付けられた状態の距離測定装置の実施形態の斜視図である。
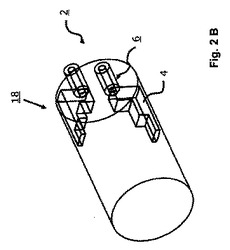
【図2B】2つの3段モード変換器を備えた図2Aの実施形態の斜視図である。
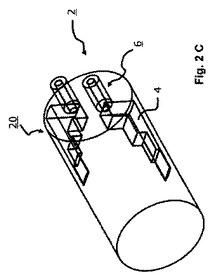
【図2C】2つの4段モード変換器を備えた図2Aの実施形態の斜視図である。
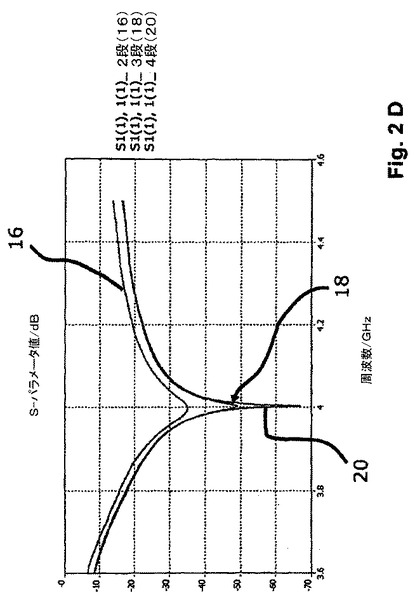
【図2D】図2A、図2B及び図2Cの実施形態において種々の数のステップのモード変換器を備えた導通クロスオーバ適合度のグラフ図である。
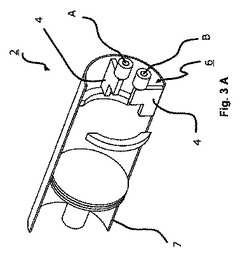
【図3A】互いに対して90°だけオフセットした2つのモード変換器を備えた導通クロスオーバがシリンダに取り付けられた状態の距離測定装置の実施形態の斜視図である。
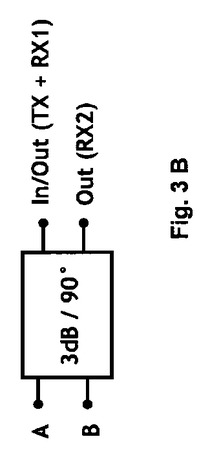
【図3B】図3Aの実施形態の導通クロスオーバの略図である。
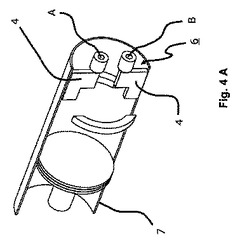
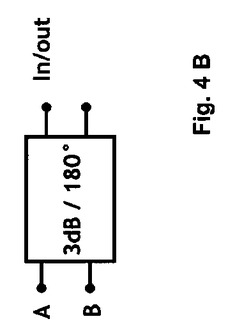
【図4A】互いに対して180°だけオフセットした2つのモード変換器を備えた導通クロスオーバがシリンダに取り付けされた状態の距離測定装置の実施形態の斜視図である。
【図4B】直線偏波電磁波を射出する図4Aの実施形態の導通クロスオーバの略図である。
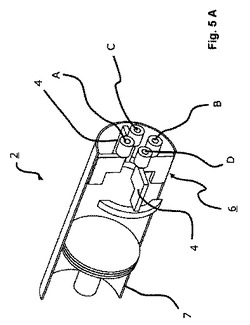
【図5A】互いに対して90°だけオフセットした4つのモード変換器を備えた導通クロスオーバがシリンダに取り付けられた状態の距離測定装置の実施形態の斜視図である。
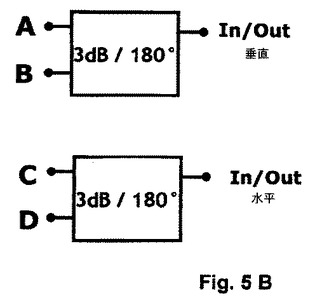
【図5B】2回直線偏波電磁波を射出する図5Aの実施形態の導通クロスオーバの略図である。
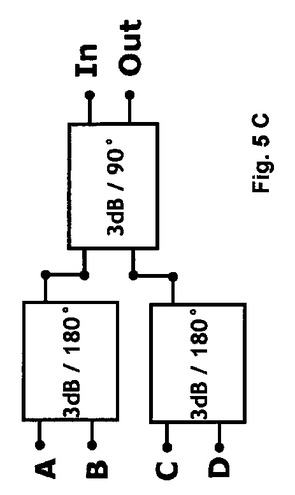
【図5C】2回円偏波電磁波を射出する図5Aの実施形態の導通クロスオーバの略図である。
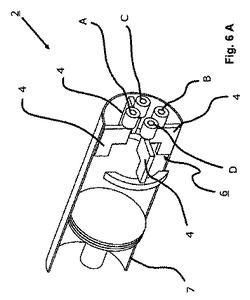
【図6A】互いに対して90°だけオフセットした4つのモード変換器を備えた導通クロスオーバがシリンダに取り付けられた状態の距離測定装置の実施形態の斜視図である。
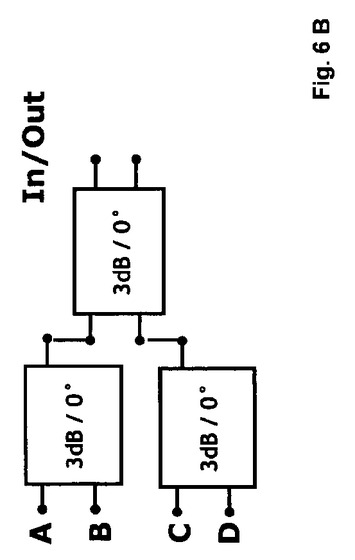
【図6B】E01モードで直線偏波電磁波を射出する図6Aの実施形態の導通クロスオーバの略図である。
【図7A】導通クロスオーバ及び誘電ディスクがシリンダに取り付けられた状態の距離測定装置の実施形態の断面図である。
【図7B】図7Aの実施形態の誘電ディスク付き導通クロスオーバ適合度のグラフ図である。
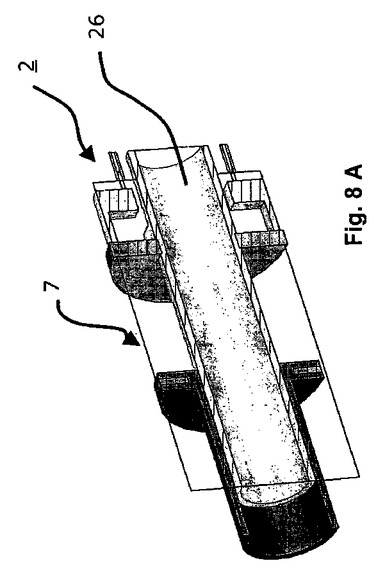
【図8A】連続ピストンロッドを備えたシリンダに対する距離測定装置の実施形態の断面図である。
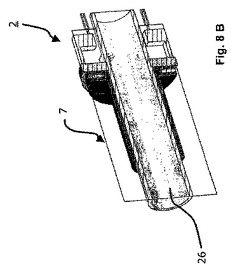
【図8B】連続ピストンロッドを備えたシリンダに対する距離測定装置の実施形態の断面図である。
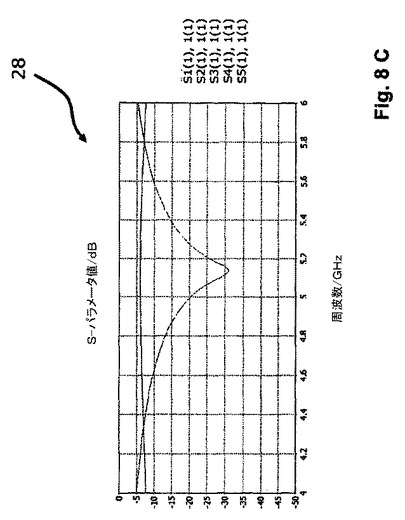
【図8C】図8Aに示された実施形態に従ってTEMモード又はH11x‐H11yモードで電磁波を射出したときの導通クロスオーバ適合度のグラフ図である。
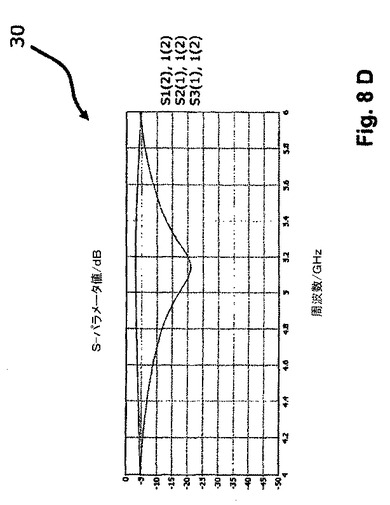
【図8D】図8Bに示された実施形態に従ってTEMモード又はH11x‐H11yモードで電磁波を射出したときの導通クロスオーバ適合度のグラフ図である。
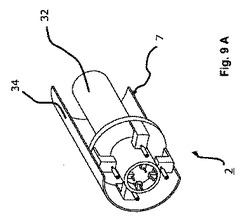
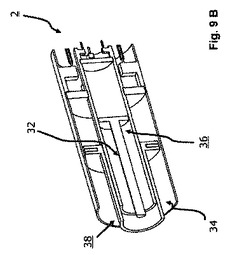
【図9A】二重ピストンロッドを備えたシリンダに対する距離測定装置の実施形態の斜視図である。
【図9B】二重ピストンロッドを備えたシリンダに対する距離測定装置の実施形態の断面図である。
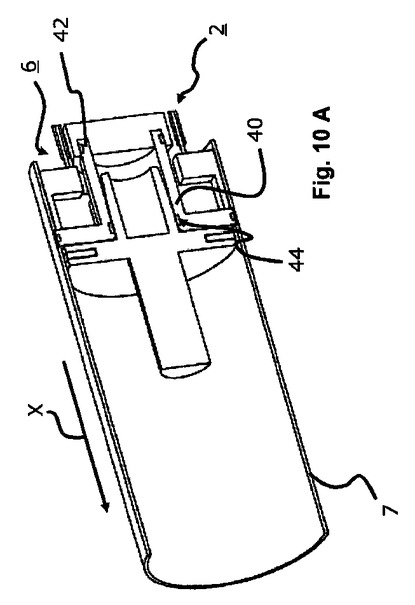
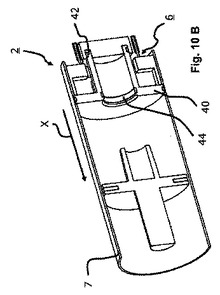
【図10A】導通クロスオーバ及びカラー形誘電ディスクがシリンダに取り付けられた状態の距離測定装置の実施形態の断面図である。
【図10B】導通クロスオーバ及びカラー形誘電ディスクがシリンダに取り付けられた状態の距離測定装置の実施形態の断面図である。
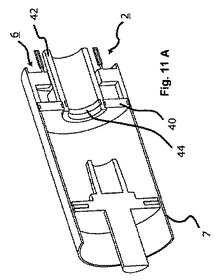
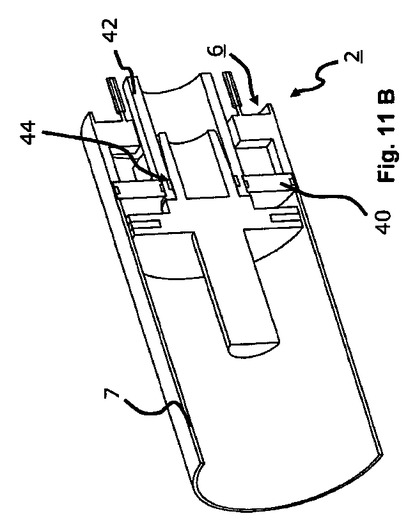
【図11A】図10Bの距離測定装置の実施形態の断面図であり、カラーが金属で作られている状態を示す図である。
【図11B】図10Aの距離測定装置の実施形態の断面図であり、カラーが金属で作られている状態を示す図である。
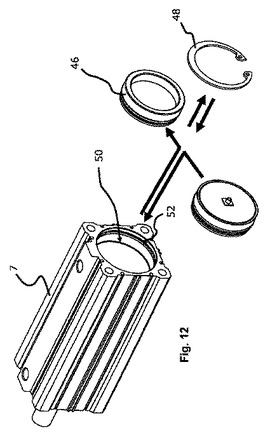
【図12】端カバーに取って代って中空シリンダに取り付ける距離測定装置の実施形態の分解組立て図である。
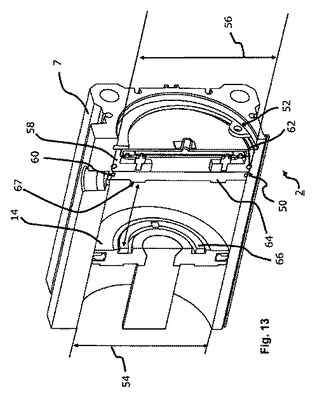
【図13】距離測定装置が中空シリンダ内に挿入され、クランプリングによって固定された状態の図12の実施形態の断面図である。
【図14】端カバーに取って代わって中空シリンダに取り付ける距離測定装置の別の実施形態の分解組立て図である。
【図15】図14の実施形態の断面図であり、距離測定装置が中空シリンダ内に挿入され、ねじにより中空シリンダに固定されている状態を示す図である。
【図16】図15の実施形態の斜視図である。
【図17】図15の実施形態の分解組立て図である。
【発明を実施するための形態】
【0072】
添付の図面は、位相及び振幅に従って電磁波の異なる偏波及びその伝搬を生じさせるためのモード変換器の構成について以下に説明する多くの例示の実施形態を示している。図の全てにおいて、互いに対応した部分は、同一の参照符号で示されている。
【0073】
図1は、同軸波をモード変換器4によってシリンダ7中へのH11モードで直線偏波中空導体波中に射出するモード変換器4の形態をした導通クロスオーバ6を備えている距離測定装置2の実施形態の斜視図である。2段モード変換器4及び同軸射出器8が示されている。また、二重シェル機械的ピストン停止部10,12が示されており、かかる二重シェル機械的ピストン停止部は、特に、モード変換器4をピストン14との衝突から保護する。
【0074】
図2A、図2B及び図2Cは、誘導モード変換器4の形態をした導通クロスオーバ6を備えている距離測定装置の互いに異なる実施形態を示している。変換ステップの数が増大するにつれて、適合度が向上する(図2D)。2段(16)、3段(18)及び4段(20)モード変換器4が示されている(図2A、図2B及び図2C)。
【0075】
図3Aは、同軸波の平行射出及びH11モードにおける2つの直線偏波中空導体波(水平及び垂直)への変換のために2つのモード変換器4が互いに対して90°ずらされた状態の導通クロスオーバ6を備えた距離測定装置2の実施形態の斜視図である。2つのモード変換器4は、シリンダ7の端部に設けられた円の円形経路にわたり機械的に90°ずらされた状態で配置されている。
【0076】
図3Bは、図3Aの実施形態に従って3dB結合が行われると共に電磁波相互間に90°の位相差がある導通クロスオーバの略図である。
【0077】
図3Aに示されている構成も又、円偏波を生じさせるために用いられる。しかしながら、射出は、この場合、2つの波の位相が90°又は180°だけずらされた状態で起こる。
【0078】
図4Aは、同軸波の射出及びH11モードにおける直線偏波中空導体波への変換のために互いに対して180°だけオフセットした2つのモード変換器4を備えた導通クロスオーバ6がシリンダ7に取り付けされた状態の距離測定装置2の実施形態の斜視図である。同軸波の射出は、機械的に180°だけずらされた状態で配置された2つのモード変換器4で起こる。モード変換器4に射出される波は、更に、追加的に図4Bに概略的に示されているように180°の位相ずれを示す。
【0079】
図5Aは、同軸波の射出及びH11モードにおけるそれぞれの2つの直線偏波中空導体波又は1つ若しくは2つ以上の円偏波中空導体波への変換のために互いに対して90°だけオフセットした4つのモード変換器4を備えた導通クロスオーバ6がシリンダ7に取り付けられた状態の距離測定装置2の実施形態の斜視図である。電磁波の射出は、それぞれ機械的に90°だけずらされている4つのモード変換器4で起こる。二重直線射出は、この場合、例えば、垂直偏波が180°の位相ずれの状態において0°(A)及び180°(B)でモード変換器4に供給され、水平偏波は、180°の位相ずれの状態において90°(C)及び270°(D)でモード変換器4に供給されるので生じる(図5B)。
【0080】
単一及び二重円偏波は、円の円形経路にわたり配置された4つのモード変換器によって電磁波が90°の位相ずれの状態で例えば時計回りの方向に射出されるので生じる(図5C)。
【0081】
図6Aは、同軸波の射出及びE01モードでの直線偏波への変換のために互いに対して90°だけオフセットした4つのモード変換器4を備えた導通クロスオーバ6がシリンダ7に取り付けられた状態の距離測定装置2の実施形態の斜視図である。射出は、機械的にそれぞれ90°だけずらされた状態で配置されている4つ全てのモード変換器4により同相で(図6B)起こる。
【0082】
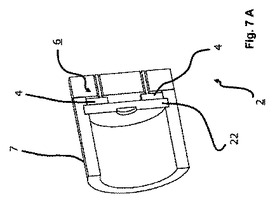
図7Aは、導通クロスオーバ及び誘電ディスクがシリンダに取り付けられた状態の距離測定装置の実施形態の断面図であり、導通クロスオーバ6は、一段モード変換器4を備えている。誘電ディスク22は、中空導体波の非結合領域に嵌め込まれている。空気と比較して多くの誘電性数の誘電ディスク22により、所望のモード、例えばH11モードでの電磁波のスイングイン経路の短絡が起こる。それと同時に、誘電ディスク22は、ピストンの機械的停止部として使用できる(図7Aには示されていない)。この形態により、一段モード変換器において特に導通クロスオーバの極めて短い設計が得られる。
【0083】
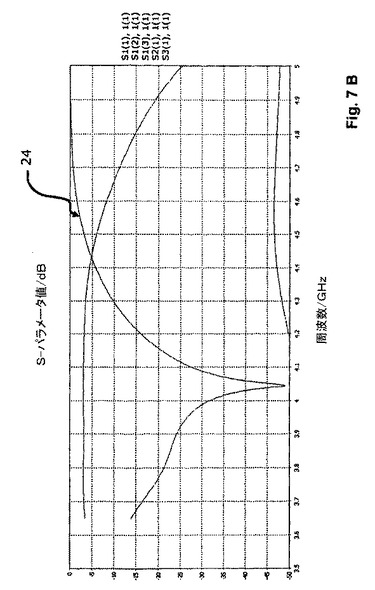
図7Bにおいては、図7Aの構成のSパラメータがグラフ図で示されている。図示の例では、20dBよりも良好な適合度が、3.8GHz〜4.15GHzの周波数範囲について達成される(これについては、S11曲線、24を参照されたい)。
【0084】
図8A及び図8Bは、連続ピストンロッド26の機能原理を備えたシリンダ7に対する距離測定装置2の実施形態の断面図である。この実施形態に関しても、提案する誘導モード変換器4を用いることができる。しかしながら、この同軸中空導体システムに関し、TEMモード28(図8C)は、好ましくは、適合度に関して僅かな出力低下を考慮することによって刺激され、又、H11モード30を刺激することが可能である(図8D)。
【0085】
図9A及び図9Bは、それぞれ、二重ピストンロッド32,34を備えたシリンダ7に対する距離測定装置2の実施形態の斜視図及び断面図である。この場合、2本又は3本以上のピストンロッド32,34は、互いに入れ子状に且つ別個独立にして動く。機能原理を組み合わせることにより、全体的に内方に動くピストン36のピストン位置及び外側ピストン38のピストン位置をそれぞれ、図2〜図7のシステム及び図8A,図8Bの構成により互いに別個独立に検出することができる。図9Bでは、二重ピストンシステムは、内側ピストン36及び外側ピストン38によって示されている。
【0086】
図10A及び図10Bは、導通クロスオーバ6及びハット形又はカラー形誘電ディスク40がシリンダ7に取り付けられた状態の距離測定装置2の実施形態の断面図である。管状内側領域42内にはx方向に動くことができるシール44が設けられている。この構成により、空気圧端部衝撃緩衝をもたらすことが可能である。
【0087】
図11A及び図11Bは、図10A及び図10Bの距離測定装置2の実施形態の断面図であり、ハット又はカラーは、金属で作られている減衰管(管状内側領域42)として働く。
【0088】
ピストンとセンサとの間の距離を連続的に測定することができるようにするためには、伝送信号を変調する必要がある。これは、周波数変調の形態で行うのが良い。しかしながら、この場合、高い距離分解能を達成するためには、大きな周波数偏差が必要である。実際には、CW信号を例えば互いに異なる周波数で伝送することがより有利である。その目的は、それぞれ次に行われる伝送信号と受信信号の位相差をセンサと測定ピストンとの間の距離に関する極めて正確な測定値として分析することにより明確な距離範囲(あいまい性関数!)を求めることにある。用いられる周波数の数及びその位置は、真っ先に、測定されるべき最大距離及び位相角度測定に関する所用の許容誤差で決まる。一般に、2つの測定周波数相互間の周波数差が僅かである場合、測定可能な最大距離は長いが、2つの連続して位置する周期相互間の差により、大きな周波数の差の場合よりも位相角度測定の高い精度が必要である。したがって、個々の測定差相互間の差が大きい場合には干渉抵抗が高い。
【0089】
干渉抵抗が十分な状態で広い測定範囲を測定する場合、適当な周波数位置で多くの測定周波数が必要である。このように、伝送周波数の差が小さい場合(広い測定範囲)と周波数差が大きい場合(干渉抵抗)の両方において対をなす周波数が必要である。位置の精度は、実質的に、測定周波数が最も高い状態での位相角度測定の精度によって定められる。というのは、波長がこの場合最も低いからである。以下の公式が当てはまる。
【0090】
〔数1〕
経路変化=位相角度変化×波長/180°
【0091】
さらに、測定精度に関するかなりの向上は、偏波が異なる状態での多くの信号を分析する場合に達成できる。かくして、水平偏波の電磁波及び垂直偏波の電磁波を例えば2つのモード変換器が90°離れて設けられている場合に同時に刺激することができる。円偏波電磁波の分析は、より有利であることが判明した。一方のモード変換器が例えば左円偏波を伝送する場合、この左円偏波は、ピストンで反射され(全反射)、180°の位相ジャンプに基づいて偏波方向を変える。射出された左円偏波は、右円偏波として受け取られる。しかしながら、干渉エコーは、回転方向を維持し、左円偏波として受け取られる。フィードネットワーク、例えば分岐線カプラにより、両方の信号は、水平又は垂直偏波として結合解除され、更に処理される。この場合、干渉エコーは、例えば、垂直偏波の受け入れチャネル内に現われ、これに対し、有用な情報(=ピストン位置)は、水平偏波の受け入れチャネル中に現われる。
【0092】
図12には、導体終端部として働く端カバー46に取って代わって中空シリンダ7に取り付けられる距離測定装置2の別の実施形態が示されている。クランプリング48と中空シリンダ7に設けられた棚部40との間に固定された端カバー46は、クランプリング48を中空シリンダ7に設けられた切欠き52から外すことにより中空シリンダ7から取り外し可能である。次に、距離測定装置2をこの距離測定装置2又は中空シリンダ7に対してそれ以上改造しないで停止部としての棚部50まで中空シリンダ7内に挿入し、クランプリング52によって固定することができる。距離測定装置2を中空シリンダ7の棚部50で停止させるため、距離測定装置2の直径は、それに対応して寸法決めされている。
【0093】
図13は、距離測定装置2が中空シリンダ7内に挿入されてクランプリング52によって固定された状態の図12の実施形態の断面図である。距離測定装置2は、ピストン側で中空シリンダ7の棚部50に当たる。というのは、中空シリンダ7の棚部50の内径の寸法は、金属本体58の外径56の寸法よりも小さいからである。ピストン14と距離測定装置2との間のキャビティを密封するため、距離測定装置2には2つのシール60,62が設けられており、シール60は、圧力シールとして作用するピストン14の方へ向き、シール62は、高周波数シールとして働くピストン14から遠ざかる方向に向いている。ピストン14の空気圧による減衰のために且つピストン14と距離測定装置2に設けられた誘電外側ディスク64が衝突するのを阻止するため、誘電外側ディスク64に設けられた棚部67と協働する減衰要素66が少なくともピストン14に設けられている。
【0094】
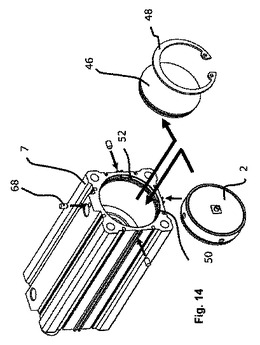
図14には、導体終端部として働く端カバー46に取って代わって中空シリンダ7に取り付けられる距離測定装置2の別の実施形態が示されている。クランプリング48と中空シリンダ7に設けられた棚部50との間に固定された端カバー46は、クランプリング48を中空シリンダ7に設けられた切欠き52から離脱させることにより中空シリンダ7から取り外し可能である。次に、距離測定装置2をこの距離測定装置2又は中空シリンダ7に対してそれ以上改造しないで停止部としての棚部50まで中空シリンダ7内に挿入し、そして例示の実施形態では、止めねじ69によって固定することができる。
【0095】
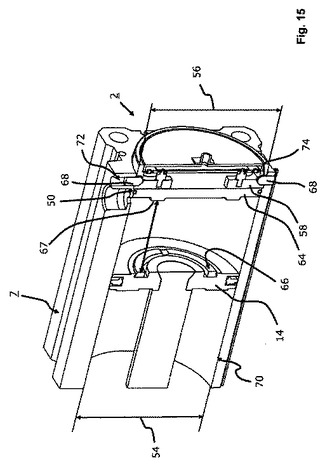
図15は、距離測定装置2が中空シリンダ7内に挿入されて止めねじ68によって固定された状態の図14の実施形態の断面図である。距離測定装置2は、ピストン側で中空シリンダ7の棚部50に当たる。というのは、中空シリンダ7の内径54の寸法は、棚部50に関して金属本体58の外径56の寸法よりも小さいからである。ピストン14の空気圧による減衰のために且つピストン14と距離測定装置2に設けられた誘電外側ディスク64が衝突するのを阻止するため、減衰要素66が少なくともピストン14に設けられ、減衰要素66は、誘電外側ディスク64に設けられた棚部67と協働する。この例示の実施形態では、中空シリンダ7内への距離測定装置2のロックは、止めねじ68により実現される。変形例として又は組み合わせ例として、止めピンを用いても良い。この例示の実施形態では、止めねじ68は、中空シリンダ7の内側ジャケット70に続く円形経路を辿って互いに対して90°の角度だけずらされた状態で(図17)、中空シリンダ7にあけられたボア穴72に挿入され、そして距離測定装置2に設けられている凹み74内に挿入され、そしてねじ連結部によって固定されており、凹み74は、端部に取り付けられた距離測定装置2のボア穴72と反対側に位置している。
【0096】
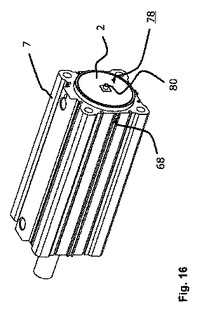
図16は、距離測定装置2が中空シリンダ7内に挿入され、そして止めねじ68により固定された状態の図14の実施形態の斜視図である。中空シリンダ7の導体終端部を形成する距離測定装置2は、中空シリンダ7から遠ざかる方向に向いた側部が端ディスク78及び距離測定装置2に電気的に接触する端子80で終端している。
【0097】
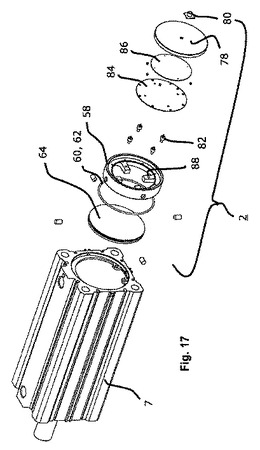
図17は、特に距離測定装置2の図15に示されている実施形態の分解組立て斜視図であり、この距離測定装置2は、中空シリンダ7の方へ向いた側部が誘電外側ディスク64で終端し、中空シリンダ7から遠ざかる方向に向いた側部の方向に、密封リング60,62、金属本体58、同軸フィードスルー82、ディスク84、エレクトロニクスを備えた基板86並びに端ディスク78及び端子80を備えている。電磁波の射出は、導電性を備えた状態で基板86のエレクトロニクス及び金属本体58にこの金属本体に設けられている棚部88を介して接続された同軸フィードスルー82によって起こる。
【0098】
一般に、誘導性供給方式に関する測定方法は、容量性供給方式にも使用できることは理解されるべきである。
【技術分野】
【0001】
本発明は、距離測定装置及び距離を計算する方法に関する。
【背景技術】
【0002】
例えば、とりわけ、空気圧又は油圧シリンダを備えた線形(直線)駆動装置のピストン位置を検出する従来型距離測定装置が用いられている。シリンダ上におけるピストン位置の検出は、作動中、離散的であり、即ち、とびとびの箇所のところで行われると共に連続しており、即ち、一定である場合がある。
【0003】
ピストン位置の離散的判定は、一般に、プロセス制御(例えば、SPS)へのピストン運動の実行又は完了を報告し、かくして、例えば、次の手順ステップを開始することができるようにするために必要である。
【0004】
この目的のため、磁界に感応するセンサ又は検出装置が主として用いられており、かかるセンサ又は検出装置は、シリンダピストンに設けられた永久磁石の磁界を検出する。これら形式のセンサは、主として、磁界に感応するセンサの形態をしており、リードスイッチ、磁気抵抗(MR)スイッチ、巨大磁気抵抗(GMR)スイッチ、ホールスイッチ又は磁石誘導近接スイッチと呼ばれている。本発明の分野において用いられるセンサは、ピストンシリンダのシリンダ管の外部に取り付けられる。ピストンがこれらセンサのうちの1つの検出範囲に入った場合、この1つのセンサは、シリンダ管中のシリンダピストンの存在を認識する。
【0005】
他方、別の位置を検出する場合、センサは、これに対応して、機械的に調節されなければならない。したがって、更に検出されるべきあらゆる位置に関し、別のセンサを関連の追加の材料費、取り付け費、調節費及び設置費をかけて取り付けなければならない。これは、一般に、顧客の構内で行われる。多くの場合、シリンダは、この場合、既に接近がしにくい状態で取り付けられており、外部に取り付けられた磁気スイッチを機械的にずらすことによるスイッチ距離の調節は、もはや可能ではない。
【0006】
さらに、追加の設置空間がこれら外部取り付け型センサに必要である。センサの接近性及び頑丈さを保証することができるようにするため、構造的な複雑さの増大が必要な場合が多い。センサの外部取り付けは、満足のゆくものではない。というのは、かかるセンサは、外部からの外来性影響によって満たされる場合があるからである。シリンダへのセンサの取り付け具が破断する場合があり、センサは、床に落下する場合がある。この結果、誤差が信号として知らされ、組み立てラインが止まる場合がある。空気圧駆動装置に関する全作動停止の50%は、上述したような仕方で起こる。
【0007】
連続ピストン位置測定の場合、電位差的に、磁気抵抗的に又はLVDT(線形可変差動変圧器)原理に従って機能する測定システムが常用されている。これらシステムでは、ピストン位置は、主として、アナログ電圧信号として連続的に出力される。LVDT原理に従うセンサは、常時、スイッチオン時に基準経路を必要とする。また、増分経路測定法がこれらシステムの補完手段として知られている。これらシステムは、例えば、ピストンロッドの磁気コード化によって実現され、従って、経路の相対的測定に使用できるにすぎない。加うるに、ピストンロッドが伸張すると、切りくずがピストンロッドに吸い付けられ、これら切りくずは、次に、ピストンロッドが引っ込められたときにシールを破壊する。磁気抵抗及び電位差型経路測定システムは、中空に穿孔されるべきピストンロッドの外部に又はこの内部に取り付けられる。中空ピストンロッドは、駆動装置を弱体化させ、外部取り付けにより、相当な人員・機材等の配備上の複雑さが生じる。
【0008】
シリンダ内に組み込むことができる連続ピストン位置判定技術も離散的ピストン位置判定技術も存在せず、或いは、これらを設けたとしても、相当な構造上の複雑さ及び関連の高い費用が伴う。相当な構造的複雑さは、上述の十分に確立したセンサ原理の全てをこれに対応したシリンダ長さに適合させなければならないという事実に起因して生じる。というのは、かかる原理の検出範囲は、短すぎるからである。
【0009】
国際出願PCT/EP03/00894号明細書は、空気圧/油圧作動式シリンダチャンバ内へのマイクロ波センサの組み込みを記載している。この手段の利点は、センサが中央に位置決めされることであり、この空間は、空気圧端部衝撃緩衝に必要な場合が多い。
【0010】
別の利点は次の通りである。
‐ピストンは、これが考えられる限り最も理想的な高い周波数の標的を表示するよう設計されなければならないこと、
‐センサの測定精度が結合プローブの適合に実質的に依存しているということ、
‐測定原理は、ピストンロッドが存在していないシリンダの半部内でのみ機能すること、
‐誘電保持システムがアンテナの取り付けに必要であること。
【0011】
以下に説明するセンサ設計例では、直線駆動装置中への経路センサの遠くに及ぶ組み込みが考慮に入れなければならない直接的組み込みと関連した上述の欠点を生じないで可能である。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】国際出願PCT/EP03/00894号明細書
【発明の概要】
【発明が解決しようとする課題】
【0013】
したがって、本発明の目的は、上述の欠点を解決すると共に連続的な、従って、離散化可能な距離測定、簡単な取り扱い及び広汎な可能な使用を可能にする距離測定装置及び距離の計算方法を提供することにある。
【課題を解決するための手段】
【0014】
この目的は、請求項1の特徴を有する装置及び請求項27の特徴を有する方法によって達成される。
【0015】
シリンダ内におけるピストン位置の判定のための本発明の距離測定装置は、以下の特性を有している。
‐特に高い精度での連続絶対距離測定が可能であること。
‐シリンダカバー内への送受信装置及び分析エレクトロニクスの全体的組み込みが可能であり、即ち、外部に取り付けられる部品が存在しないこと。さらに、シリンダの空気圧関連部分、例えばピストン、端部衝撃緩衝、ピストンロッド又は空気供給装置に対する機械的改造が不要であること。
‐距離測定装置を既存の標準寸法がそのままの状態で使用できること。
‐スイッチ距離を電子インターフェイスによって外部から調節できるはずであること(ティーチイン能力)。
‐シリンダ長さ(X長さ能力)とは無関係に万能的に使用できるセンサ(送受信装置)。
‐測定結果をシリンダ内の圧力、油及び湿度とは無関係に得ることができること。
‐十分に定められた全てのシリンダ直径用のセンサ(送受信装置)を使用できること。
【0016】
本発明によれば、距離測定装置及び距離の計算方法を利用でき、検出装置は、高い周波数の送受信装置、同軸導体からのシリンダの形態をしているのが良い中空導体中へのクロスオーバ、反射標的及び分析ユニットを有する。送受信装置は、波を放射してこれら波を受け取ることによって中空導電性又はライン構造体内における比距離を測定するのに役立つ。
【0017】
さらに、本発明によれば、導電性構造体中の反射体と導電性構造体の端部に設けられた電磁波のための射出箇所との間の距離を計算する距離測定装置であって、この距離測定装置が、送受信装置を有し、送受信装置は、射出箇所のところに設けられていて、電磁波を導電性構造体中に射出すると共に反射体で反射された電磁波を導電性構造体から結合解除するために送受信装置を導電性構造体に同軸誘導結合する導通クロスオーバを備え、この距離測定装置が、射出箇所と反射体との間の距離を射出された電磁波と結合解除された電磁波の位相差から計算する分析装置を更に有することを特徴とする距離測定装置が提供される。
【0018】
本発明によれば、反射標的までの導電性構造体の長さを測定する方法が提供される。本発明の方法により提供される伝送信号は、導電性構造体中に供給され、反射標的で反射され、そして再び入力又は供給(フィード)システムを介して受け取られる。このように、誘導中空導体クロスオーバにより定められる射出箇所と反射標的との間の距離の測定が実施される。この距離は、この場合、電磁波の互いに異なる周波数及び偏波を含む伝送信号と受信信号の位相差を測定することにより測定される。
【0019】
本発明によれば、導電性構造体内の反射体と導電性構造体の端部のところに設けられた電磁波のための射出箇所との間の距離を計算する方法であって、この方法が、射出箇所のところで同軸誘導導通クロスオーバを介して電磁波を導電性構造体中に射出するステップと、
‐反射体で反射された電磁波を導通クロスオーバにより導電性構造体から結合解除するステップと、
‐射出箇所と反射体との間の距離を射出された電磁波と結合解除された電磁波との位相差から計算するステップとを有することを特徴とする方法が提供される。
【0020】
本発明は、特に以下の利点を有する。
‐センサシステムのコンポーネントの全ては、小型であるよう構成されており、従って、シリンダ内への組み込みに必要な再構成措置がほとんどなく又はほんの僅かであるようになっている。
‐検出装置は、全体として、空気圧シリンダの端カバー内に収容可能である。
‐したがって、本発明の距離測定装置の構造全体は、外部検出装置を取り付ける可能性をなしですますことにより清浄で滑らかな設計を有し、従って、これは、外観に影響を及ぼさない。
【0021】
従属形式の請求項は、本発明の装置及び本発明の方法の有利な別の改造例を構成している。
【0022】
有利には、導電性構造体は、中空シリンダの形態をしている。有利な別の改造例では、中空シリンダは、空気圧又は油圧シリンダの形態をしている。有利には、ピストンが中空シリンダ内に設けられ、このピストンは、反射体として働く。
【0023】
有利な別の改造例によれば、導電性構造体中への電磁波の射出は、モノモーダル電磁波の形態で1MHz〜100GHzの周波数範囲で起こる。有利には、導電性構造体中への電磁波の射出は、H11若しくはE01モードで又はTEMモードでは同軸導電性構造体、特にシリンダ内に連続的に形成されたピストンで起こる。
【0024】
E01モードで直線偏波電磁波を発生させるため、有利には、同軸波を導通クロスオーバの導電性の誘導モード変換器又は導通クロスオーバの2つ若しくは4つの導電性誘導モード変換器によって導電性構造体中に同相で射出する。
【0025】
水平又は垂直偏波電磁波を導電性構造体中に射出するためには、導通クロスオーバは、有利な別の改造例では、導電性誘導モード変換器を有する。
【0026】
有利には、導通クロスオーバは、端部の付近に設けられた円の円形経路にわたって互いに対して180°だけずらされた状態で配置されている2つの導電性誘導モード変換器を有し、この変換器により、互いに対して180°だけ位相ずれした直線偏波電磁波を導電性構造体中に射出することができる。
【0027】
有利な別の改造例では、導通クロスオーバは、端部の付近に設けられた円の円形経路にわたって互いに対して90°だけずらされた状態で配置されている2つの導電性誘導モード変換器を有し、この変換器により、垂直又は水平偏波電磁波を導電性構造体中に射出することができる。
【0028】
有利な別の改造例によれば、導通クロスオーバは、端部の付近に設けられた円の円形経路にわたって互いに対して90°だけずらされた状態で配置されている4つの導電性誘導モード変換器を有し、互いに対して180°だけ位相ずれした垂直偏波電磁波を互いに対して180°だけずらされた2つのモード変換器により導電性構造体中に平行に射出することができ、互いに対して180°だけ位相ずれした水平偏波電磁波を互いに対して180°だけずらされた2つのモード変換器によって導電性構造体中に平行に射出することができ、これらモード変換器は、それぞれ、垂直偏波電磁波のためのモード変換器に対して90°だけずらされている。
【0029】
有利には、導通クロスオーバは、端部の付近に設けられた円の円形経路にわたって互いに対して90°だけずらされた状態で配置された2つの導電性誘導モード変換器を有し、この変換器により、互いに対して90°又は120°だけ位相ずれした円偏波電磁波を導電性構造体中にそれぞれ射出することができる。また、円偏波電磁波を90°だけずらされた4つのモード変換器により発生させることができる。しかしながら、モード変換器に例えば反時計回りの方向に送られる信号は、次に、それぞれ、互いに対して90°だけ位相ずれする。
【0030】
有利な別の改造例では、各モード変換器は、機械的階段の形態をしている。有利な別の改造例によれば、機械的階段は、導電性構造体上での反射体の方向におけるステップ高さが減少した状態で配置されている。有利には、階段は各々、2つ、3つ、4つ又はそれ以上のステップを備えた状態で具体化されている。
【0031】
送受信装置を導電性構造体に結合するため、導通クロスオーバは、有利には、各モード変換器とモード変換器の機械的階段の最も高いステップの後面中に導電性構造体の端部上で挿入された同軸内側導体との間に設けられた接触部を有する。有利には、機械的階段の最も高いステップの後面と端部の形態をした導電性構造体のカバー後壁との間には、数ミリメートルの距離が空けられている。
【0032】
円偏波の場合、反時計回り又は時計回りの電磁波を水平又は垂直偏波電磁波に変換するため、送受信装置は、有利には、各モード変換器について、分岐線カプラと、分岐線カプラの下流側に設けられていて、3dB結合及び180°の位相回転がなされたカプラとを有する。このように、全反射及び円形回転方向への関連の変化、即ち、反時計回りの方向から時計回りの方向へ又は時計回りの方向から反時計回りの方向への関連の変化の際に反射体で反射された円偏波電磁波の標的エコーは、全反射の作用を受けない干渉エコーから分離可能である。
【0033】
水平又は垂直偏波電磁波を同時に検出するため、有利な別の改造例によれば、送受信装置は、2チャンネル受信器を有する。
【0034】
有利には、少なくとも1つの外側ピストン及び少なくとも1つの内側ピストンを備えた多ピストンシステムのための誘導モード変換器は、外側ピストン又は内側ピストンと射出箇所との間の距離を検出するために外側ピストンにより反射された電磁波と内側ピストンにより反射された電磁波の両方を結合解除するよう設計されている。
【0035】
射出された電磁波のスイングイン経路を一モードで短くするため、有利には、反射体とモード変換器との間に導電性構造体の内周部全体にわたり好ましくはレキサン、PPS40又はテフロン(登録商標)で作られた誘電ディスクがモード変換器に隣接して設けられる。
【0036】
有利な別の改造例によれば、誘電ディスクは、中心が内側管を備え、減衰ピストンが内側管中に突入することができるようになっている。有利には、内側管は、金属で作られている。
【0037】
導通クロスオーバの方向におけるピストンの運動を制限するため、導電性構造体中には、2つの四分円リングとして導電性構造体と協働するピストン停止部が設けられている。有利な別の改造例によれば、誘電ディスクは、ピストン停止部として働く。
【0038】
有利な別の改造例によれば、距離測定装置は、導電性構造体の終端部、端カバー又は端部の形態をしており、従って、中空シリンダの形態をした導電性構造体を特に簡単には、距離測定装置を備えた状態でコスト及び時間を特に大幅に節約した状態で提供できる。中空シリンダを改造するため、ケーブル終端部又は端部として作用するピストンと反対側に位置する後壁だけを距離測定装置で置き換える必要があるに過ぎず、そのための労力は極めて少ない。もしそうでなければ、導電性構造体又は中空シリンダに対する変更及び/又は改造は不要である。
【0039】
導電性構造体及び/又は距離測定装置に対する改造、保守及び修理並びに導電性構造体に取り付けられている距離測定装置の交換のためには、導電性構造体への距離測定装置の取り付け具を提供して距離測定装置を導電性構造体から取り外すことができるようにするのが有利である。このようにすると、距離測定装置を完全に製造して試験し、その後、中空シリンダへの最終取り付けを行うと共に/或いは出荷を行うことができる。
【0040】
距離測定装置を導電性構造体内に保持するためには、導電性構造体中に導入された距離測定装置と協働する棚部を停止部として導電性構造体に反射体の方へ向いた側に設けて距離測定装置を導電性構造体中に棚部までしか導入することができないようにすることが有利である。
【0041】
距離測定装置が導体終端部として確実に導電性構造体内に位置したままであるようにするために且つ距離測定装置が導電性構造体内で滑らないようにするためには、導電性構造体内に反射体から遠ざかる方向に向いた側にクランプリングを設けることが有利である。
【0042】
有利な別の改造例によれば、クランプリングは、導電性構造体に設けられていて、クランプリングが部分的に挿入される切欠きによって導電性構造体と協働する。さらに、クランプリングは、有利には、導電性構造体内における反射体から遠ざかる方向に向いた側での距離測定装置の滑りが回避されるよう寸法決めされる。
【0043】
有利な別の改造例では、距離測定装置は、導電性構造体内で、少なくとも1本のロックピン及び/又は少なくとも1本のねじにより保持される。有利な別の改造例では、ロックピン及び/又はねじは、導電性構造体に設けられたボア穴によって導電性構造体と協働すると共に距離測定装置に設けられたボア穴によって距離測定装置と協働する。
【0044】
距離測定装置を導電性構造体内に特に確実に保持するため、多数本のロックピン及び/又は多数本のねじが設けられるのが有利であり、これらロックピン及び/又はねじは、それぞれ、導電性構造体及び/又は距離測定装置のボア穴内に挿入され、或いは、導電性構造体及び/又は距離測定装置に螺合される。
【0045】
中空シリンダの形態をした導電性構造体では、多数本のロックピン及び/又は多数本のねじが有利には中空シリンダのジャケットに続く円形経路にわたり実質的に等間隔をおいて分布して配置された状態で設けられる。
【0046】
ピストンの反射体と距離測定装置との間の導電性構造体中のキャビティを密封するため、少なくとも1つのシール、有利には2つのシールが、距離測定装置と導電性構造体との間に設けられ、シールのうちの一方は、圧力シールとして働き、他方のシールは、高周波シールとして働く。有利な別の改造例では、シールは、密封リングの形態をしている。
【0047】
有利な別の改造例によれば、互いに異なる伝送周波数の伝送信号が電磁波と一緒に射出される。例えば、広い測定範囲をカバーするため、伝送周波数は、有利には、伝送周波数相互間の差が絶対値から小さい、例えば1%差であるように選択される。例えば高い干渉抵抗レベルを達成するため、伝送周波数は、有利な形態によれば、伝送周波数相互間の差が絶対値で考えて大きく、例えば20%差であるように選択される。
【0048】
有利には、電磁波により放射された伝送信号は、連続して放出される。有利な一実施形態によれば、CW信号として電磁波を含む伝送信号が射出される。
【0049】
有利な別の改造例では、垂直及び水平偏波を含む電磁波が並行して分析される。
【0050】
伝送器は、電磁波を同軸ケーブルにより中空導体中に誘導的に供給するVCO(電圧制御発信器)から成る。伝送出力の一部は、抵抗的に結合解除され、局部発振器としての受信ミキサに利用可能となる。同様に、受信信号は、カプラにより伝送チャネルから結合解除される。というのは、供給構成が伝送器と受信器の両方に用いられるからである。かくして、同軸波は、中空導体を誘導的に結合することによりモード変換器によってH11波型の中空導体中に変換される。接触は、例えばボア穴中への押し込みによって同軸内側導体がモード変換器のフェース側に取り付けられることにより起こる。金属製カバー端壁とモード変換器との間にはミリメートル範囲の空間が存在する。多くのモード変換器によって、波の異なる偏波及び高いモードによる波の刺激を次のように判定することができる。
【0051】
1つのモード変換器によるH11‐直線偏波:しかしながら、この非対称誘導性同軸中空導体による供給により、波形式11の波だけが刺激されるだけでなく、周期性に続く全てのHモードが刺激される。
【0052】
しかしながら、中空導体の外径に関するあらかじめ指定された基本的条件(比制限周波数に依存した中空導体モードの非周期的減衰)に基づいて、進んだ対応の距離の後、H11モードが伝搬してエネルギーを運ぶことができるに過ぎない(スイングイン特性)。
【0053】
2つのモード変換器によるH11‐直線偏波:180°だけ鏡像関係にある別の誘導同軸中空導体による供給を追加することにより、対称刺激が生じ、刺激モードの数及び進んだ所用の距離が少なくなる。
【0054】
しかしながら、同軸導電性システム内での180°だけ位相ずれした2つの信号の射出は、この刺激の基本的な必要条件である。
【0055】
H11中空導体波の直交性を用いることにより:H11x‐H117:即ち、H11x及びH11y形式の2つの同一の中空導体波の理論的に完全に結合解除された伝搬を用いることにより、システム内に冗長第2信号を用いることができる。このようにすると、動作上の信頼性及び更に測定精度を増大させることができる。
【0056】
H11波型の単純な使用の場合と同様、二重使用、即ち、各モード変換器を備えたH11x‐H11y‐直線偏波(垂直及び水平)及び2つの各モード変換器を備えたH11x‐H117‐直線偏波(垂直及び水平)では、簡単な又はデュアルモード変換器も又使用できる。
【0057】
円偏波:しかしながら、H11x及びH117波型の直交性に起因して、二重直線偏波の使用に加えて、円偏波の使用も可能である。円偏波は、90°だけ位相ずれした信号により2つの直交波形式を刺激することにより生じる。しかしながら、これに加えて、刺激は又、90°だけ回転させた第2の射出によって生じさせる必要がある。
【0058】
円刺激を用いることにより、次の動作状態が可能である。
‐それぞれ2つのモード変換器を備えたH11x‐H11y円偏波(モード変換器が90°だけ円形にオフセットした状態で配置されている)。
‐それぞれ4つのモード変換器を備えたH11x‐H11y円偏波(モード変換器は、互いに対して90°だけそれぞれずらされた円の円形経路にわたり配置されている)。
【0059】
E01波型を用いることによる追加の動作モード:上述したように、基本的には、同軸中空導体モード変換器を用いることにより全てのモードを刺激することが可能である。ただし、全てのモードは、この同軸中空導体モード変換器が基本条件の対応の保証によって伝搬可能であることを条件とする。
【0060】
システム内の基本条件(中空導体の直径)及び対応の刺激信号を変化させることにより使用できる別の波型は、E01波型である。
【0061】
刺激して伝搬させる場合、同じことは、考慮対象のH11波型についても当てはまる。
【0062】
以下の構成によりE01波型を刺激することができる。
‐1つのモード変換器によるE01偏波、
‐2つのモード変換器によるE01偏波(90°回転、同相刺激)、
‐2つのモード変換器によるE01偏波(180°回転、同相刺激)、
‐4つのモード変換器によるE01偏波(4×90°回転、同相刺激)。
【0063】
さらに、中空導体直径がE01制限周波数に適合される一般的な基本必要条件が当てはまる。
【0064】
連続ピストンロッドを備えたシリンダに関する動作モード:連続ピストンロッドを備えたシリンダの場合、TEMモードが好ましくは刺激される。H11モードの刺激も又可能である。この形態では、提供される誘導モード変換器も又使用できる。
【0065】
モード変換器の帯域幅及び改造:モード変換器の帯域幅は、対応の波型の互いの適合の質によって定められる。
【0066】
適合は、インピーダンス変換によって達成される。変換のこの帯域幅は、用いられる変換ステップの数により制御可能である(機械的に:階段型誘導中空導体カップリングの数)。変換ステップの数は、この場合対応したモード変換器の全長を生じさせる。しかしながら、或る特定の条件下では、変換ステップにより十分な適合を達成することも可能である。
【0067】
誘電窓(ディスク)によるスイングイン経路の短縮化:しかしながら、中空導体の外径に関するあらかじめ指定された基本的条件(比制限周波数に依存した中空導体モードの非周期的減衰)に基づいて、進んだ対応の距離の後、H11モードが伝搬してエネルギーを運ぶことができるに過ぎない(スイングイン特性)。1よりも非常に大きな値の誘電性の数のディスクの形態をした誘電窓がモード変換器に直接続く場合、進むこの距離をそれに対応して短縮することができる。PPS40、レキサン又はテフロン(登録商標)を好ましくは、材料として使用することができる。誘電ディスクは、それと同時に、これが機械的ピストン停止部として働くよう設計されるのが良い。
【0068】
空気圧端部衝撃緩衝:誘電ディスクは、これがハット状形態をとるよう形作られるのが良い。中間部の膨らみは、ピストンロッドへの付属物として取り付けられる減衰ピストンを引っ込めることができるようにする上で適している。それと同時に、ピストンの運動軸線に沿って動くことができる密封リングが提供される。減衰ピストンを保持する管も又、金属で作られるのが良い。この条件下においても、電磁波の射出が可能である。
【0069】
機械的端停止部:また、二重シェル形四分円構成をピストンのための機械的端停止部として使用することができる。
【0070】
例示の実施形態
以下において、本発明の例示の実施形態を図面により詳細に説明する。
【図面の簡単な説明】
【0071】
【図1】モード変換器を備えた導通クロスオーバがシリンダに取り付けられた状態の距離測定装置の一実施形態の斜視図である。
【図2A】2つの2段モード変換器を備えた導通クロスオーバがシリンダに取り付けられた状態の距離測定装置の実施形態の斜視図である。
【図2B】2つの3段モード変換器を備えた図2Aの実施形態の斜視図である。
【図2C】2つの4段モード変換器を備えた図2Aの実施形態の斜視図である。
【図2D】図2A、図2B及び図2Cの実施形態において種々の数のステップのモード変換器を備えた導通クロスオーバ適合度のグラフ図である。
【図3A】互いに対して90°だけオフセットした2つのモード変換器を備えた導通クロスオーバがシリンダに取り付けられた状態の距離測定装置の実施形態の斜視図である。
【図3B】図3Aの実施形態の導通クロスオーバの略図である。
【図4A】互いに対して180°だけオフセットした2つのモード変換器を備えた導通クロスオーバがシリンダに取り付けされた状態の距離測定装置の実施形態の斜視図である。
【図4B】直線偏波電磁波を射出する図4Aの実施形態の導通クロスオーバの略図である。
【図5A】互いに対して90°だけオフセットした4つのモード変換器を備えた導通クロスオーバがシリンダに取り付けられた状態の距離測定装置の実施形態の斜視図である。
【図5B】2回直線偏波電磁波を射出する図5Aの実施形態の導通クロスオーバの略図である。
【図5C】2回円偏波電磁波を射出する図5Aの実施形態の導通クロスオーバの略図である。
【図6A】互いに対して90°だけオフセットした4つのモード変換器を備えた導通クロスオーバがシリンダに取り付けられた状態の距離測定装置の実施形態の斜視図である。
【図6B】E01モードで直線偏波電磁波を射出する図6Aの実施形態の導通クロスオーバの略図である。
【図7A】導通クロスオーバ及び誘電ディスクがシリンダに取り付けられた状態の距離測定装置の実施形態の断面図である。
【図7B】図7Aの実施形態の誘電ディスク付き導通クロスオーバ適合度のグラフ図である。
【図8A】連続ピストンロッドを備えたシリンダに対する距離測定装置の実施形態の断面図である。
【図8B】連続ピストンロッドを備えたシリンダに対する距離測定装置の実施形態の断面図である。
【図8C】図8Aに示された実施形態に従ってTEMモード又はH11x‐H11yモードで電磁波を射出したときの導通クロスオーバ適合度のグラフ図である。
【図8D】図8Bに示された実施形態に従ってTEMモード又はH11x‐H11yモードで電磁波を射出したときの導通クロスオーバ適合度のグラフ図である。
【図9A】二重ピストンロッドを備えたシリンダに対する距離測定装置の実施形態の斜視図である。
【図9B】二重ピストンロッドを備えたシリンダに対する距離測定装置の実施形態の断面図である。
【図10A】導通クロスオーバ及びカラー形誘電ディスクがシリンダに取り付けられた状態の距離測定装置の実施形態の断面図である。
【図10B】導通クロスオーバ及びカラー形誘電ディスクがシリンダに取り付けられた状態の距離測定装置の実施形態の断面図である。
【図11A】図10Bの距離測定装置の実施形態の断面図であり、カラーが金属で作られている状態を示す図である。
【図11B】図10Aの距離測定装置の実施形態の断面図であり、カラーが金属で作られている状態を示す図である。
【図12】端カバーに取って代って中空シリンダに取り付ける距離測定装置の実施形態の分解組立て図である。
【図13】距離測定装置が中空シリンダ内に挿入され、クランプリングによって固定された状態の図12の実施形態の断面図である。
【図14】端カバーに取って代わって中空シリンダに取り付ける距離測定装置の別の実施形態の分解組立て図である。
【図15】図14の実施形態の断面図であり、距離測定装置が中空シリンダ内に挿入され、ねじにより中空シリンダに固定されている状態を示す図である。
【図16】図15の実施形態の斜視図である。
【図17】図15の実施形態の分解組立て図である。
【発明を実施するための形態】
【0072】
添付の図面は、位相及び振幅に従って電磁波の異なる偏波及びその伝搬を生じさせるためのモード変換器の構成について以下に説明する多くの例示の実施形態を示している。図の全てにおいて、互いに対応した部分は、同一の参照符号で示されている。
【0073】
図1は、同軸波をモード変換器4によってシリンダ7中へのH11モードで直線偏波中空導体波中に射出するモード変換器4の形態をした導通クロスオーバ6を備えている距離測定装置2の実施形態の斜視図である。2段モード変換器4及び同軸射出器8が示されている。また、二重シェル機械的ピストン停止部10,12が示されており、かかる二重シェル機械的ピストン停止部は、特に、モード変換器4をピストン14との衝突から保護する。
【0074】
図2A、図2B及び図2Cは、誘導モード変換器4の形態をした導通クロスオーバ6を備えている距離測定装置の互いに異なる実施形態を示している。変換ステップの数が増大するにつれて、適合度が向上する(図2D)。2段(16)、3段(18)及び4段(20)モード変換器4が示されている(図2A、図2B及び図2C)。
【0075】
図3Aは、同軸波の平行射出及びH11モードにおける2つの直線偏波中空導体波(水平及び垂直)への変換のために2つのモード変換器4が互いに対して90°ずらされた状態の導通クロスオーバ6を備えた距離測定装置2の実施形態の斜視図である。2つのモード変換器4は、シリンダ7の端部に設けられた円の円形経路にわたり機械的に90°ずらされた状態で配置されている。
【0076】
図3Bは、図3Aの実施形態に従って3dB結合が行われると共に電磁波相互間に90°の位相差がある導通クロスオーバの略図である。
【0077】
図3Aに示されている構成も又、円偏波を生じさせるために用いられる。しかしながら、射出は、この場合、2つの波の位相が90°又は180°だけずらされた状態で起こる。
【0078】
図4Aは、同軸波の射出及びH11モードにおける直線偏波中空導体波への変換のために互いに対して180°だけオフセットした2つのモード変換器4を備えた導通クロスオーバ6がシリンダ7に取り付けされた状態の距離測定装置2の実施形態の斜視図である。同軸波の射出は、機械的に180°だけずらされた状態で配置された2つのモード変換器4で起こる。モード変換器4に射出される波は、更に、追加的に図4Bに概略的に示されているように180°の位相ずれを示す。
【0079】
図5Aは、同軸波の射出及びH11モードにおけるそれぞれの2つの直線偏波中空導体波又は1つ若しくは2つ以上の円偏波中空導体波への変換のために互いに対して90°だけオフセットした4つのモード変換器4を備えた導通クロスオーバ6がシリンダ7に取り付けられた状態の距離測定装置2の実施形態の斜視図である。電磁波の射出は、それぞれ機械的に90°だけずらされている4つのモード変換器4で起こる。二重直線射出は、この場合、例えば、垂直偏波が180°の位相ずれの状態において0°(A)及び180°(B)でモード変換器4に供給され、水平偏波は、180°の位相ずれの状態において90°(C)及び270°(D)でモード変換器4に供給されるので生じる(図5B)。
【0080】
単一及び二重円偏波は、円の円形経路にわたり配置された4つのモード変換器によって電磁波が90°の位相ずれの状態で例えば時計回りの方向に射出されるので生じる(図5C)。
【0081】
図6Aは、同軸波の射出及びE01モードでの直線偏波への変換のために互いに対して90°だけオフセットした4つのモード変換器4を備えた導通クロスオーバ6がシリンダ7に取り付けられた状態の距離測定装置2の実施形態の斜視図である。射出は、機械的にそれぞれ90°だけずらされた状態で配置されている4つ全てのモード変換器4により同相で(図6B)起こる。
【0082】
図7Aは、導通クロスオーバ及び誘電ディスクがシリンダに取り付けられた状態の距離測定装置の実施形態の断面図であり、導通クロスオーバ6は、一段モード変換器4を備えている。誘電ディスク22は、中空導体波の非結合領域に嵌め込まれている。空気と比較して多くの誘電性数の誘電ディスク22により、所望のモード、例えばH11モードでの電磁波のスイングイン経路の短絡が起こる。それと同時に、誘電ディスク22は、ピストンの機械的停止部として使用できる(図7Aには示されていない)。この形態により、一段モード変換器において特に導通クロスオーバの極めて短い設計が得られる。
【0083】
図7Bにおいては、図7Aの構成のSパラメータがグラフ図で示されている。図示の例では、20dBよりも良好な適合度が、3.8GHz〜4.15GHzの周波数範囲について達成される(これについては、S11曲線、24を参照されたい)。
【0084】
図8A及び図8Bは、連続ピストンロッド26の機能原理を備えたシリンダ7に対する距離測定装置2の実施形態の断面図である。この実施形態に関しても、提案する誘導モード変換器4を用いることができる。しかしながら、この同軸中空導体システムに関し、TEMモード28(図8C)は、好ましくは、適合度に関して僅かな出力低下を考慮することによって刺激され、又、H11モード30を刺激することが可能である(図8D)。
【0085】
図9A及び図9Bは、それぞれ、二重ピストンロッド32,34を備えたシリンダ7に対する距離測定装置2の実施形態の斜視図及び断面図である。この場合、2本又は3本以上のピストンロッド32,34は、互いに入れ子状に且つ別個独立にして動く。機能原理を組み合わせることにより、全体的に内方に動くピストン36のピストン位置及び外側ピストン38のピストン位置をそれぞれ、図2〜図7のシステム及び図8A,図8Bの構成により互いに別個独立に検出することができる。図9Bでは、二重ピストンシステムは、内側ピストン36及び外側ピストン38によって示されている。
【0086】
図10A及び図10Bは、導通クロスオーバ6及びハット形又はカラー形誘電ディスク40がシリンダ7に取り付けられた状態の距離測定装置2の実施形態の断面図である。管状内側領域42内にはx方向に動くことができるシール44が設けられている。この構成により、空気圧端部衝撃緩衝をもたらすことが可能である。
【0087】
図11A及び図11Bは、図10A及び図10Bの距離測定装置2の実施形態の断面図であり、ハット又はカラーは、金属で作られている減衰管(管状内側領域42)として働く。
【0088】
ピストンとセンサとの間の距離を連続的に測定することができるようにするためには、伝送信号を変調する必要がある。これは、周波数変調の形態で行うのが良い。しかしながら、この場合、高い距離分解能を達成するためには、大きな周波数偏差が必要である。実際には、CW信号を例えば互いに異なる周波数で伝送することがより有利である。その目的は、それぞれ次に行われる伝送信号と受信信号の位相差をセンサと測定ピストンとの間の距離に関する極めて正確な測定値として分析することにより明確な距離範囲(あいまい性関数!)を求めることにある。用いられる周波数の数及びその位置は、真っ先に、測定されるべき最大距離及び位相角度測定に関する所用の許容誤差で決まる。一般に、2つの測定周波数相互間の周波数差が僅かである場合、測定可能な最大距離は長いが、2つの連続して位置する周期相互間の差により、大きな周波数の差の場合よりも位相角度測定の高い精度が必要である。したがって、個々の測定差相互間の差が大きい場合には干渉抵抗が高い。
【0089】
干渉抵抗が十分な状態で広い測定範囲を測定する場合、適当な周波数位置で多くの測定周波数が必要である。このように、伝送周波数の差が小さい場合(広い測定範囲)と周波数差が大きい場合(干渉抵抗)の両方において対をなす周波数が必要である。位置の精度は、実質的に、測定周波数が最も高い状態での位相角度測定の精度によって定められる。というのは、波長がこの場合最も低いからである。以下の公式が当てはまる。
【0090】
〔数1〕
経路変化=位相角度変化×波長/180°
【0091】
さらに、測定精度に関するかなりの向上は、偏波が異なる状態での多くの信号を分析する場合に達成できる。かくして、水平偏波の電磁波及び垂直偏波の電磁波を例えば2つのモード変換器が90°離れて設けられている場合に同時に刺激することができる。円偏波電磁波の分析は、より有利であることが判明した。一方のモード変換器が例えば左円偏波を伝送する場合、この左円偏波は、ピストンで反射され(全反射)、180°の位相ジャンプに基づいて偏波方向を変える。射出された左円偏波は、右円偏波として受け取られる。しかしながら、干渉エコーは、回転方向を維持し、左円偏波として受け取られる。フィードネットワーク、例えば分岐線カプラにより、両方の信号は、水平又は垂直偏波として結合解除され、更に処理される。この場合、干渉エコーは、例えば、垂直偏波の受け入れチャネル内に現われ、これに対し、有用な情報(=ピストン位置)は、水平偏波の受け入れチャネル中に現われる。
【0092】
図12には、導体終端部として働く端カバー46に取って代わって中空シリンダ7に取り付けられる距離測定装置2の別の実施形態が示されている。クランプリング48と中空シリンダ7に設けられた棚部40との間に固定された端カバー46は、クランプリング48を中空シリンダ7に設けられた切欠き52から外すことにより中空シリンダ7から取り外し可能である。次に、距離測定装置2をこの距離測定装置2又は中空シリンダ7に対してそれ以上改造しないで停止部としての棚部50まで中空シリンダ7内に挿入し、クランプリング52によって固定することができる。距離測定装置2を中空シリンダ7の棚部50で停止させるため、距離測定装置2の直径は、それに対応して寸法決めされている。
【0093】
図13は、距離測定装置2が中空シリンダ7内に挿入されてクランプリング52によって固定された状態の図12の実施形態の断面図である。距離測定装置2は、ピストン側で中空シリンダ7の棚部50に当たる。というのは、中空シリンダ7の棚部50の内径の寸法は、金属本体58の外径56の寸法よりも小さいからである。ピストン14と距離測定装置2との間のキャビティを密封するため、距離測定装置2には2つのシール60,62が設けられており、シール60は、圧力シールとして作用するピストン14の方へ向き、シール62は、高周波数シールとして働くピストン14から遠ざかる方向に向いている。ピストン14の空気圧による減衰のために且つピストン14と距離測定装置2に設けられた誘電外側ディスク64が衝突するのを阻止するため、誘電外側ディスク64に設けられた棚部67と協働する減衰要素66が少なくともピストン14に設けられている。
【0094】
図14には、導体終端部として働く端カバー46に取って代わって中空シリンダ7に取り付けられる距離測定装置2の別の実施形態が示されている。クランプリング48と中空シリンダ7に設けられた棚部50との間に固定された端カバー46は、クランプリング48を中空シリンダ7に設けられた切欠き52から離脱させることにより中空シリンダ7から取り外し可能である。次に、距離測定装置2をこの距離測定装置2又は中空シリンダ7に対してそれ以上改造しないで停止部としての棚部50まで中空シリンダ7内に挿入し、そして例示の実施形態では、止めねじ69によって固定することができる。
【0095】
図15は、距離測定装置2が中空シリンダ7内に挿入されて止めねじ68によって固定された状態の図14の実施形態の断面図である。距離測定装置2は、ピストン側で中空シリンダ7の棚部50に当たる。というのは、中空シリンダ7の内径54の寸法は、棚部50に関して金属本体58の外径56の寸法よりも小さいからである。ピストン14の空気圧による減衰のために且つピストン14と距離測定装置2に設けられた誘電外側ディスク64が衝突するのを阻止するため、減衰要素66が少なくともピストン14に設けられ、減衰要素66は、誘電外側ディスク64に設けられた棚部67と協働する。この例示の実施形態では、中空シリンダ7内への距離測定装置2のロックは、止めねじ68により実現される。変形例として又は組み合わせ例として、止めピンを用いても良い。この例示の実施形態では、止めねじ68は、中空シリンダ7の内側ジャケット70に続く円形経路を辿って互いに対して90°の角度だけずらされた状態で(図17)、中空シリンダ7にあけられたボア穴72に挿入され、そして距離測定装置2に設けられている凹み74内に挿入され、そしてねじ連結部によって固定されており、凹み74は、端部に取り付けられた距離測定装置2のボア穴72と反対側に位置している。
【0096】
図16は、距離測定装置2が中空シリンダ7内に挿入され、そして止めねじ68により固定された状態の図14の実施形態の斜視図である。中空シリンダ7の導体終端部を形成する距離測定装置2は、中空シリンダ7から遠ざかる方向に向いた側部が端ディスク78及び距離測定装置2に電気的に接触する端子80で終端している。
【0097】
図17は、特に距離測定装置2の図15に示されている実施形態の分解組立て斜視図であり、この距離測定装置2は、中空シリンダ7の方へ向いた側部が誘電外側ディスク64で終端し、中空シリンダ7から遠ざかる方向に向いた側部の方向に、密封リング60,62、金属本体58、同軸フィードスルー82、ディスク84、エレクトロニクスを備えた基板86並びに端ディスク78及び端子80を備えている。電磁波の射出は、導電性を備えた状態で基板86のエレクトロニクス及び金属本体58にこの金属本体に設けられている棚部88を介して接続された同軸フィードスルー82によって起こる。
【0098】
一般に、誘導性供給方式に関する測定方法は、容量性供給方式にも使用できることは理解されるべきである。
【特許請求の範囲】
【請求項1】
導電性構造体中の反射体と電磁波のための前記導電性構造体の端部に設けられた射出箇所との間の距離を計算する距離測定装置(2)であって、
‐送受信装置を有し、前記送受信装置は、前記射出箇所のところに設けられていて、電磁波を導電性構造体中に射出すると共に前記反射体で反射された前記電磁波を前記導電性構造体から結合解除するために前記送受信装置を前記導電性構造体に同軸誘導結合する導通クロスオーバ(6)を備え、
‐前記射出箇所と前記反射体との間の距離を前記射出された電磁波と前記結合解除された電磁波の位相差から計算する分析装置を有する、距離測定装置。
【請求項2】
導電性構造体は、中空シリンダ(7)の形態をしている、請求項1記載の距離測定装置。
【請求項3】
前記中空シリンダ(7)は、空気圧若しくは油圧シリンダ又は測定シリンダの形態をしている、請求項2記載の距離測定装置。
【請求項4】
前記中空シリンダ(7)内には、反射体として働くピストン(36,38)が設けられている、請求項2又は3記載の距離測定装置。
【請求項5】
前記導電性構造体中への電磁波の前記射出は、モノモーダル電磁波の形態で1MHz〜100GHzの周波数範囲で起こる、請求項1〜4のうちいずれか一に記載の距離測定装置。
【請求項6】
前記導電性構造体中への電磁波の前記射出は、好ましくは、H11若しくはE01モードで又は前記TEMモードでは同軸導電性構造体で起こる、請求項1〜5のうちいずれか一に記載の距離測定装置。
【請求項7】
前記E01モードでの直線偏波電磁波を前記導通クロスオーバ(6)の導電性の誘導モード変換器(4)又は前記導通クロスオーバ(6)の2つ若しくは4つの導電性誘導モード変換器(4)によって前記導電性構造体中への同軸波の同相射出によって生じさせることができる、請求項6記載の距離測定装置。
【請求項8】
前記導通クロスオーバ(6)は、導電性誘導モード変換器(4)を有し、該変換器(4)により、水平又は垂直偏波電磁波を前記導電性構造体中に射出することができる、請求項1〜7のうちいずれか一に記載の距離測定装置。
【請求項9】
前記導通クロスオーバ(6)は、前記端部の付近に設けられた円の円形経路にわたって互いに対して180°だけずらされた状態で配置されている2つの導電性誘導モード変換器(4)を有し、該変換器(4)により、互いに対して180°だけ位相ずれした直線偏波電磁波を前記導電性構造体中に射出することができる、請求項1〜7のうちいずれか一に記載の距離測定装置。
【請求項10】
前記導通クロスオーバ(6)は、前記端部の付近に設けられた円の円形経路にわたって互いに対して90°だけずらされた状態で配置されている2つの導電性誘導モード変換器(4)を有し、該変換器(4)により、垂直又は水平偏波電磁波を前記導電性構造体中に射出することができる、請求項1〜7のうちいずれか一に記載の距離測定装置。
【請求項11】
前記導通クロスオーバ(6)は、前記端部の付近に設けられた円の円形経路にわたって互いに対して90°だけずらされた状態で配置されている4つの導電性誘導モード変換器(4)を有し、互いに対して180°だけ位相ずれした垂直偏波電磁波を互いに対して180°だけずらされた2つのモード変換器(4)により前記導電性構造体中に平行に射出することができ、互いに対して180°だけ位相ずれした水平偏波電磁波を互いに対して180°だけずらされた2つのモード変換器(4)によって前記導電性構造体中に平行に射出することができ、該モード変換器(4)は、それぞれ、前記垂直偏波電磁波のための前記モード変換器(4)に対して90°だけずらされている、請求項1〜7のうちいずれか一に記載の距離測定装置。
【請求項12】
前記導通クロスオーバ(6)は、前記端部の付近に設けられた円の円形経路にわたって互いに対して90°だけずらされた状態で配置された2つの導電性誘導モード変換器(4)を有し、該変換器(4)により、互いに対して90°だけ位相ずれした直線偏波電磁波を前記導電性構造体中にそれぞれ射出することができる、請求項1〜6のうちいずれか一に記載の距離測定装置。
【請求項13】
前記導通クロスオーバ(6)は、前記端部の付近に設けられた円の円形経路にわたり互いに対して90°だけずらされた状態で配置されている4つの導電性誘導モード変換器(4)を有し、該変換器(4)により、円偏波電磁波を射出することができ、該変換器(4)は、例えばそれぞれ時計回りの方向に90°だけ位相ずれされた状態で供給される、請求項1〜6のうちいずれか一に記載の距離測定装置。
【請求項14】
前記モード変換器(4)は各々、機械的階段の形態をしている、請求項7〜13のうちいずれか一に記載の距離測定装置。
【請求項15】
前記機械的階段は、前記導電性構造体上での前記反射体の方向におけるステップ高さが減少した状態で配置されている、請求項14記載の距離測定装置。
【請求項16】
前記階段は各々、2つ(16)、3つ(18)、4つ(20)又はそれ以上のステップを備えた状態で設計されている、請求項14又は15記載の距離測定装置。
【請求項17】
前記導通クロスオーバ(6)は、各モード変換器(4)と前記モード変換器(4)の前記機械的階段の最も高いステップの後面中に前記導電性構造体の端部上で挿入された同軸内側導体との間に設けられていて、前記送受信装置を前記導電性構造体に結合する接触部を有する、請求項14〜16のうちいずれか一に記載の距離測定装置。
【請求項18】
前記機械的階段の前記最も高いステップの後面と端部の形態をした前記導電性構造体のカバー後壁との間には、数ミリメートルの空間が設けられている、請求項17記載の距離測定装置。
【請求項19】
前記送受信装置は、各モード変換器(4)について、分岐線カプラと、前記分岐線カプラの下流側に設けられていて、3dB結合及び180°の位相回転がなされたカプラとを有する、請求項12〜18のうちいずれか一に記載の距離測定装置。
【請求項20】
前記送受信装置は、垂直偏波及び水平偏波を同時に受け取る2チャンネル受信器を有する、請求項10〜19のうちいずれか一に記載の距離測定装置。
【請求項21】
少なくとも1つの外側ピストン(38)及び少なくとも1つの内側ピストン(36)を備えた多ピストンシステムのための前記誘導モード変換器(4)は、前記外側ピストン(38)又は前記内側ピストン(36)と前記射出箇所との間の距離を検出するために前記外側ピストン(38)により反射された電磁波と前記内側ピストン(36)により反射された電磁波の両方を結合解除するよう設計されている、請求項10〜20のうちいずれか一に記載の距離測定装置。
【請求項22】
前記反射体と前記モード変換器(4)との間には、前記導電性構造体の内周部全体にわたり好ましくはレキサン、PPS40又はテフロン(登録商標)で作られた誘電ディスク(22,40)が前記モード変換器(4)に隣接して設けられている、請求項7〜21のうちいずれか一に記載の距離測定装置。
【請求項23】
前記誘電ディスク(40)は、中心が内側管(42)を備え、減衰ピストンが前記内側管(42)中に突入することができるようになっている、請求項22記載の距離測定装置。
【請求項24】
前記内側管(42)は、金属で作られている、請求項23記載の距離測定装置。
【請求項25】
前記誘電ディスク(22,40)は、ピストン停止部として働く、請求項22〜24のうちいずれか一に記載の距離測定装置。
【請求項26】
前記導電性構造体中には、2つの四分円リング(10,12)として前記導電性構造体と協働するピストン停止部(10,12)が設けられている、請求項1〜25のうちいずれか一に記載の距離測定装置。
【請求項27】
導電性構造体内の反射体と前記導電性構造体の端部のところに設けられた電磁波のための射出箇所との間の距離を計算する方法であって、
‐前記射出箇所のところで同軸誘導導通クロスオーバ(6)を介して電磁波を前記導電性構造体中に射出するステップと、
‐前記反射体で反射された前記電磁波を前記導通クロスオーバ(6)により前記導電性構造体から結合解除するステップと、
‐前記射出箇所と前記反射体との間の距離を前記射出された電磁波と前記結合解除された電磁波との位相差から計算するステップとを有する、方法。
【請求項28】
前記電磁波は、E01モード若しくはH11モードで又は同軸導体構造体がTEMモードの状態で前記導電性構造体中に射出される、請求項27記載の方法。
【請求項29】
種々の伝送周波数をもつ伝送信号が前記電磁波と共に射出される、請求項27又は28記載の方法。
【請求項30】
前記伝送周波数は、前記伝送周波数相互間の差が広い測定範囲をカバーするために絶対値から小さい、例えば1%差であるように選択される、請求項29記載の方法。
【請求項31】
前記伝送周波数は、前記伝送周波数相互間の差が高い干渉抵抗レベルを達成するために絶対値で考えて大きく、例えば20%差であるように選択される、請求項29記載の方法。
【請求項32】
前記電磁波により放射された伝送信号は、連続して放出される、請求項27〜31のうちいずれか一に記載の方法。
【請求項33】
CW信号の形態をした伝送信号が前記電磁波と一緒に射出される、請求項27〜32のうちいずれか一に記載の方法。
【請求項34】
垂直及び水平偏波を含む電磁波が並行して分析される、請求項27〜33のうちいずれか一に記載の方法。
【請求項35】
円偏波を備えた反時計回り又は時計回りの電磁波は、分岐線カプラにより水平又は垂直偏波電磁波に変換される、請求項27〜33のうちいずれか一に記載の方法。
【請求項36】
円偏波を含む反射体での全反射により、回転方向の逆転が生じ、即ち、左円偏波が右円偏波になり又はその逆の関係が成り立ち、これにより、明確なピストン検出が可能になる、請求項35記載の方法。
【請求項37】
前記距離測定装置は、前記導電性構造体の端部の形態をしている、請求項1〜26のうちいずれか一に記載の距離測定装置。
【請求項38】
前記距離測定装置は、前記導電性構造体に取り外し可能に取り付けられた状態で配置されている、請求項37記載の距離測定装置。
【請求項39】
前記距離測定装置は、前記反射体の方へ向いた側部が、前記導電性構造体に設けられていて前記距離測定装置と協働する突出部により前記導電性構造体内に保持されている、請求項37又は38記載の距離測定装置。
【請求項40】
前記距離測定装置は、前記反射体から遠ざかる方向へ向いた側部が、前記導電性構造体及び前記端部と協働するクランプリングによって前記導電性構造体内に保持されている、請求項37〜39のうちいずれか一に記載の距離測定装置。
【請求項41】
前記距離測定装置は、前記導電性構造体及び前記端部と協働する少なくとも1本のロックピンにより前記導電性構造体内に保持されている、請求項37〜40のうちいずれか一に記載の距離測定装置。
【請求項42】
前記距離測定装置と前記導電性構造体との間にはシールが設けられている、請求項37〜41のうちいずれか一に記載の距離測定装置。
【請求項43】
前記シールは、密封リングの形態をしている、請求項42記載の距離測定装置。
【請求項44】
請求項1〜26又は請求項37〜43のうちいずれか一に記載の距離測定装置により導電性構造体を改造する方法であって、前記導電性構造体の端部の形態をしていて、前記反射体と反対側に位置したカバー後壁を前記導電性構造体から取り外し、端部の形態をした前記距離測定装置で置き換える、方法。
【請求項1】
導電性構造体中の反射体と電磁波のための前記導電性構造体の端部に設けられた射出箇所との間の距離を計算する距離測定装置(2)であって、
‐送受信装置を有し、前記送受信装置は、前記射出箇所のところに設けられていて、電磁波を導電性構造体中に射出すると共に前記反射体で反射された前記電磁波を前記導電性構造体から結合解除するために前記送受信装置を前記導電性構造体に同軸誘導結合する導通クロスオーバ(6)を備え、
‐前記射出箇所と前記反射体との間の距離を前記射出された電磁波と前記結合解除された電磁波の位相差から計算する分析装置を有する、距離測定装置。
【請求項2】
導電性構造体は、中空シリンダ(7)の形態をしている、請求項1記載の距離測定装置。
【請求項3】
前記中空シリンダ(7)は、空気圧若しくは油圧シリンダ又は測定シリンダの形態をしている、請求項2記載の距離測定装置。
【請求項4】
前記中空シリンダ(7)内には、反射体として働くピストン(36,38)が設けられている、請求項2又は3記載の距離測定装置。
【請求項5】
前記導電性構造体中への電磁波の前記射出は、モノモーダル電磁波の形態で1MHz〜100GHzの周波数範囲で起こる、請求項1〜4のうちいずれか一に記載の距離測定装置。
【請求項6】
前記導電性構造体中への電磁波の前記射出は、好ましくは、H11若しくはE01モードで又は前記TEMモードでは同軸導電性構造体で起こる、請求項1〜5のうちいずれか一に記載の距離測定装置。
【請求項7】
前記E01モードでの直線偏波電磁波を前記導通クロスオーバ(6)の導電性の誘導モード変換器(4)又は前記導通クロスオーバ(6)の2つ若しくは4つの導電性誘導モード変換器(4)によって前記導電性構造体中への同軸波の同相射出によって生じさせることができる、請求項6記載の距離測定装置。
【請求項8】
前記導通クロスオーバ(6)は、導電性誘導モード変換器(4)を有し、該変換器(4)により、水平又は垂直偏波電磁波を前記導電性構造体中に射出することができる、請求項1〜7のうちいずれか一に記載の距離測定装置。
【請求項9】
前記導通クロスオーバ(6)は、前記端部の付近に設けられた円の円形経路にわたって互いに対して180°だけずらされた状態で配置されている2つの導電性誘導モード変換器(4)を有し、該変換器(4)により、互いに対して180°だけ位相ずれした直線偏波電磁波を前記導電性構造体中に射出することができる、請求項1〜7のうちいずれか一に記載の距離測定装置。
【請求項10】
前記導通クロスオーバ(6)は、前記端部の付近に設けられた円の円形経路にわたって互いに対して90°だけずらされた状態で配置されている2つの導電性誘導モード変換器(4)を有し、該変換器(4)により、垂直又は水平偏波電磁波を前記導電性構造体中に射出することができる、請求項1〜7のうちいずれか一に記載の距離測定装置。
【請求項11】
前記導通クロスオーバ(6)は、前記端部の付近に設けられた円の円形経路にわたって互いに対して90°だけずらされた状態で配置されている4つの導電性誘導モード変換器(4)を有し、互いに対して180°だけ位相ずれした垂直偏波電磁波を互いに対して180°だけずらされた2つのモード変換器(4)により前記導電性構造体中に平行に射出することができ、互いに対して180°だけ位相ずれした水平偏波電磁波を互いに対して180°だけずらされた2つのモード変換器(4)によって前記導電性構造体中に平行に射出することができ、該モード変換器(4)は、それぞれ、前記垂直偏波電磁波のための前記モード変換器(4)に対して90°だけずらされている、請求項1〜7のうちいずれか一に記載の距離測定装置。
【請求項12】
前記導通クロスオーバ(6)は、前記端部の付近に設けられた円の円形経路にわたって互いに対して90°だけずらされた状態で配置された2つの導電性誘導モード変換器(4)を有し、該変換器(4)により、互いに対して90°だけ位相ずれした直線偏波電磁波を前記導電性構造体中にそれぞれ射出することができる、請求項1〜6のうちいずれか一に記載の距離測定装置。
【請求項13】
前記導通クロスオーバ(6)は、前記端部の付近に設けられた円の円形経路にわたり互いに対して90°だけずらされた状態で配置されている4つの導電性誘導モード変換器(4)を有し、該変換器(4)により、円偏波電磁波を射出することができ、該変換器(4)は、例えばそれぞれ時計回りの方向に90°だけ位相ずれされた状態で供給される、請求項1〜6のうちいずれか一に記載の距離測定装置。
【請求項14】
前記モード変換器(4)は各々、機械的階段の形態をしている、請求項7〜13のうちいずれか一に記載の距離測定装置。
【請求項15】
前記機械的階段は、前記導電性構造体上での前記反射体の方向におけるステップ高さが減少した状態で配置されている、請求項14記載の距離測定装置。
【請求項16】
前記階段は各々、2つ(16)、3つ(18)、4つ(20)又はそれ以上のステップを備えた状態で設計されている、請求項14又は15記載の距離測定装置。
【請求項17】
前記導通クロスオーバ(6)は、各モード変換器(4)と前記モード変換器(4)の前記機械的階段の最も高いステップの後面中に前記導電性構造体の端部上で挿入された同軸内側導体との間に設けられていて、前記送受信装置を前記導電性構造体に結合する接触部を有する、請求項14〜16のうちいずれか一に記載の距離測定装置。
【請求項18】
前記機械的階段の前記最も高いステップの後面と端部の形態をした前記導電性構造体のカバー後壁との間には、数ミリメートルの空間が設けられている、請求項17記載の距離測定装置。
【請求項19】
前記送受信装置は、各モード変換器(4)について、分岐線カプラと、前記分岐線カプラの下流側に設けられていて、3dB結合及び180°の位相回転がなされたカプラとを有する、請求項12〜18のうちいずれか一に記載の距離測定装置。
【請求項20】
前記送受信装置は、垂直偏波及び水平偏波を同時に受け取る2チャンネル受信器を有する、請求項10〜19のうちいずれか一に記載の距離測定装置。
【請求項21】
少なくとも1つの外側ピストン(38)及び少なくとも1つの内側ピストン(36)を備えた多ピストンシステムのための前記誘導モード変換器(4)は、前記外側ピストン(38)又は前記内側ピストン(36)と前記射出箇所との間の距離を検出するために前記外側ピストン(38)により反射された電磁波と前記内側ピストン(36)により反射された電磁波の両方を結合解除するよう設計されている、請求項10〜20のうちいずれか一に記載の距離測定装置。
【請求項22】
前記反射体と前記モード変換器(4)との間には、前記導電性構造体の内周部全体にわたり好ましくはレキサン、PPS40又はテフロン(登録商標)で作られた誘電ディスク(22,40)が前記モード変換器(4)に隣接して設けられている、請求項7〜21のうちいずれか一に記載の距離測定装置。
【請求項23】
前記誘電ディスク(40)は、中心が内側管(42)を備え、減衰ピストンが前記内側管(42)中に突入することができるようになっている、請求項22記載の距離測定装置。
【請求項24】
前記内側管(42)は、金属で作られている、請求項23記載の距離測定装置。
【請求項25】
前記誘電ディスク(22,40)は、ピストン停止部として働く、請求項22〜24のうちいずれか一に記載の距離測定装置。
【請求項26】
前記導電性構造体中には、2つの四分円リング(10,12)として前記導電性構造体と協働するピストン停止部(10,12)が設けられている、請求項1〜25のうちいずれか一に記載の距離測定装置。
【請求項27】
導電性構造体内の反射体と前記導電性構造体の端部のところに設けられた電磁波のための射出箇所との間の距離を計算する方法であって、
‐前記射出箇所のところで同軸誘導導通クロスオーバ(6)を介して電磁波を前記導電性構造体中に射出するステップと、
‐前記反射体で反射された前記電磁波を前記導通クロスオーバ(6)により前記導電性構造体から結合解除するステップと、
‐前記射出箇所と前記反射体との間の距離を前記射出された電磁波と前記結合解除された電磁波との位相差から計算するステップとを有する、方法。
【請求項28】
前記電磁波は、E01モード若しくはH11モードで又は同軸導体構造体がTEMモードの状態で前記導電性構造体中に射出される、請求項27記載の方法。
【請求項29】
種々の伝送周波数をもつ伝送信号が前記電磁波と共に射出される、請求項27又は28記載の方法。
【請求項30】
前記伝送周波数は、前記伝送周波数相互間の差が広い測定範囲をカバーするために絶対値から小さい、例えば1%差であるように選択される、請求項29記載の方法。
【請求項31】
前記伝送周波数は、前記伝送周波数相互間の差が高い干渉抵抗レベルを達成するために絶対値で考えて大きく、例えば20%差であるように選択される、請求項29記載の方法。
【請求項32】
前記電磁波により放射された伝送信号は、連続して放出される、請求項27〜31のうちいずれか一に記載の方法。
【請求項33】
CW信号の形態をした伝送信号が前記電磁波と一緒に射出される、請求項27〜32のうちいずれか一に記載の方法。
【請求項34】
垂直及び水平偏波を含む電磁波が並行して分析される、請求項27〜33のうちいずれか一に記載の方法。
【請求項35】
円偏波を備えた反時計回り又は時計回りの電磁波は、分岐線カプラにより水平又は垂直偏波電磁波に変換される、請求項27〜33のうちいずれか一に記載の方法。
【請求項36】
円偏波を含む反射体での全反射により、回転方向の逆転が生じ、即ち、左円偏波が右円偏波になり又はその逆の関係が成り立ち、これにより、明確なピストン検出が可能になる、請求項35記載の方法。
【請求項37】
前記距離測定装置は、前記導電性構造体の端部の形態をしている、請求項1〜26のうちいずれか一に記載の距離測定装置。
【請求項38】
前記距離測定装置は、前記導電性構造体に取り外し可能に取り付けられた状態で配置されている、請求項37記載の距離測定装置。
【請求項39】
前記距離測定装置は、前記反射体の方へ向いた側部が、前記導電性構造体に設けられていて前記距離測定装置と協働する突出部により前記導電性構造体内に保持されている、請求項37又は38記載の距離測定装置。
【請求項40】
前記距離測定装置は、前記反射体から遠ざかる方向へ向いた側部が、前記導電性構造体及び前記端部と協働するクランプリングによって前記導電性構造体内に保持されている、請求項37〜39のうちいずれか一に記載の距離測定装置。
【請求項41】
前記距離測定装置は、前記導電性構造体及び前記端部と協働する少なくとも1本のロックピンにより前記導電性構造体内に保持されている、請求項37〜40のうちいずれか一に記載の距離測定装置。
【請求項42】
前記距離測定装置と前記導電性構造体との間にはシールが設けられている、請求項37〜41のうちいずれか一に記載の距離測定装置。
【請求項43】
前記シールは、密封リングの形態をしている、請求項42記載の距離測定装置。
【請求項44】
請求項1〜26又は請求項37〜43のうちいずれか一に記載の距離測定装置により導電性構造体を改造する方法であって、前記導電性構造体の端部の形態をしていて、前記反射体と反対側に位置したカバー後壁を前記導電性構造体から取り外し、端部の形態をした前記距離測定装置で置き換える、方法。
【図1】

【図2A】
【図2B】
【図2C】
【図2D】
【図3A】
【図3B】
【図4A】
【図4B】
【図5A】
【図5B】
【図5C】
【図6A】
【図6B】
【図7A】
【図7B】
【図8A】
【図8B】
【図8C】
【図8D】
【図9A】
【図9B】
【図10A】
【図10B】
【図11A】
【図11B】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2A】
【図2B】
【図2C】
【図2D】
【図3A】
【図3B】
【図4A】
【図4B】
【図5A】
【図5B】
【図5C】
【図6A】
【図6B】
【図7A】
【図7B】
【図8A】
【図8B】
【図8C】
【図8D】
【図9A】
【図9B】
【図10A】
【図10B】
【図11A】
【図11B】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公表番号】特表2012−508868(P2012−508868A)
【公表日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願番号】特願2011−535924(P2011−535924)
【出願日】平成21年11月13日(2009.11.13)
【国際出願番号】PCT/EP2009/008103
【国際公開番号】WO2010/066329
【国際公開日】平成22年6月17日(2010.6.17)
【出願人】(504310102)アスティックス ゲゼルシャフト ミット ベシュレンクテル ハフツング (6)
【Fターム(参考)】
【公表日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願日】平成21年11月13日(2009.11.13)
【国際出願番号】PCT/EP2009/008103
【国際公開番号】WO2010/066329
【国際公開日】平成22年6月17日(2010.6.17)
【出願人】(504310102)アスティックス ゲゼルシャフト ミット ベシュレンクテル ハフツング (6)
【Fターム(参考)】
[ Back to top ]