
距離測定装置
【課題】 簡便で高精度な距離測定を実現する。
【解決手段】 電圧制御発信器8の出力信号は変調信号9として発光素子を駆動するとともに位相比較器11に入力され、かつ出力信号14として外部に出力される。受光素子で検出された信号は受信信号10として位相比較器11の他方の入力に接続される。 位相比較器11は二つの入力位相を比較し位相差に対応した位相信号14を出力する。位相信号14はループフィルタ15に入力され周波数制御信号13に変換されて電圧制御発信器8の周波数制御入力に接続される。 変調信号9と受信信号10の位相差が一定になるように電圧制御発信器8の発信周波数が制御される。
【解決手段】 電圧制御発信器8の出力信号は変調信号9として発光素子を駆動するとともに位相比較器11に入力され、かつ出力信号14として外部に出力される。受光素子で検出された信号は受信信号10として位相比較器11の他方の入力に接続される。 位相比較器11は二つの入力位相を比較し位相差に対応した位相信号14を出力する。位相信号14はループフィルタ15に入力され周波数制御信号13に変換されて電圧制御発信器8の周波数制御入力に接続される。 変調信号9と受信信号10の位相差が一定になるように電圧制御発信器8の発信周波数が制御される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は光を変調して測定対象に照射しその反射光を検出して照射光の変調信号と受信信号の関係により距離を測定する装置に関する。
【発明の詳細な説明】
【発明が解決しようとする課題】
【0002】
従来のこの種の装置は1乃至数種類の固定周波数の変調信号を用い、変調信号と受信信号の位相差を距離に対応させるものである。
【0003】
しかしこの方法では例えば1.5m程度の距離を測定するためには最低でも10MHz程度の変調信号が必要となり、直接十分な精度で位相差を測定することが困難である。
【0004】
このため高精度のものは位相差を保存したまま周波数変換によって低い周波数に変換して位相差を測定しているが、電子回路が複雑になり安定に十分な精度を得るためには高価なものとなる。
【課題を解決するための手段】
【0005】
請求項1の発明は周波数を固定して位相差を距離に対応させるのではなく位相差を固定して周波数を可変とし、PLLの技術を用いることにより目標位相差を実現する周波数を距離に対応させるものである。
【0006】
請求項2の発明はPLLが電圧制御発信器より対象物を経由して位相比較器に至る経路の総遅延時間の整数分の1となる周期の周波数でも位相ロックする性質を積極的に応用して前記経路中に既知遅延時間の遅延手段を挿入し、電圧制御発信器に要求される発信周波数が短距離の測定ほど周波数が高くなる不都合を解決しかつ要求される周波数可変範囲を狭くするものである。
【実施例】
【0007】
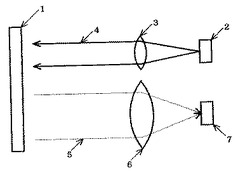
図1に光学系の例を示す。同図において発光素子2より射出された照射光4は照射レンズ3により調整されて対象物1に照射される。対象物1により反射された反射光5は受光レンズ6により集光されて受光素子7に至る。この間の光の行路長は対象物との距離の2倍となる。
【0008】
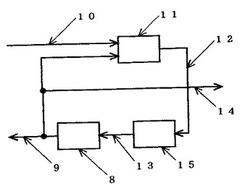
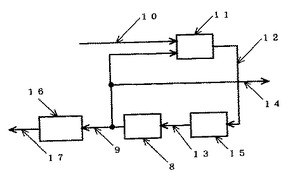
図2に本発明の基本的な実施例を示す。同図において電圧制御発信器8の出力信号は変調信号9として図1の発光素子2を駆動し同時に位相比較器11に入力され、かつ出力信号14として外部に出力される。さらに図1の受光素子7により検出された信号は受信信号10として位相比較器11の他方の入力に接続される。位相比較器はその二つの入力の位相を比較し位相差に対応した位相信号14を出力する。位相信号14はループフィルター15に入力され周波数制御信号13に変換されて電圧制御発信器8の周波数制御入力に接続される。
【0009】
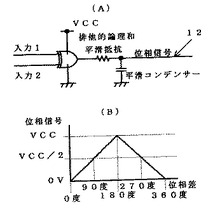
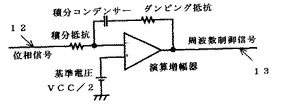
図3(A)に位相比較器の例を示す。この例では位相比較素子として二つの入力の排他的論理和を出力する論理素子を用い、その出力は平滑抵抗および平滑コンデンサーより構成される平滑回路により高周波成分が除去され位相信号12となる。図3(B)にこの回路の位相差に対する位相信号の関係を示す。
【0010】
図4にループフィルターの例を示す。これは一種の積分回路で、ループ全体の負帰還が成立しているときは入力の位相信号が基準電圧であるVCC/2となるように出力の周波数制御信号を制御する。
【0011】
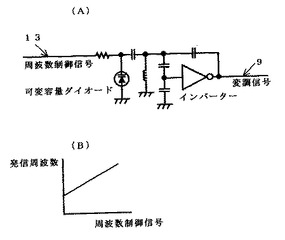
図5(A)に電圧制御発信器の例を示す。この回路はコルピッツ発信回路であり周波数の制御は可変容量ダイオードによる。図5(B)にこの回路の周波数制御信号13と発信周波数の関係を示す。
【0012】
以下説明のため光の速さC=300,000,000m/sとし、電子回路の遅延は無視する。
例として対象物との距離を1.5mとすると光の行路長は3mとなり変調信号の変化は10ns後に位相比較器に至る。
【0013】
いま電圧制御発信器8の発信周波数を20MHz(周期50ns)とする。このとき変調信号9と受信信号10の位相差は(10ns/50ns)*360度=72度となり90度よりも小さい。このため図3(B)より位相信号12はVCC/2よりも小さくなる。この位相信号がループフィルター15に印可されると基準電圧であるVCC/2よりも小さいため周波数制御信号13は徐々に上昇する。すると図5(B)に示すように電圧制御発信器8の発信周波数は上昇して相対的な位相差は大きくなり、やがて90度に達して系はロックする。
【0014】
同様に電圧制御発信器8の発信周波数を30MHz(周期約33ns)とする。このとき変調信号9と受信信号10の位相差は(10ns/33ns)*360度=108度となり90度よりも大きい。このため図3(B)より位相信号12はVCC/2よりも大きくなる。この位相信号12がループフィルター15に印可されると基準電圧であるVCC/2よりも大きいため周波数制御信号13は徐々に降下する。すると図5(B)に示すように電圧制御発信器8の発信周波数は降下して相対的な位相差は小さくなり、やはり90度に達して系はロックする。このときの周波数は25MHzである。
【0015】
一般的に位相比較器における二つの入力の時間差をT0とし、T0を周期とする周波数をF0(=1/T0)、ロックが成立する変調信号の周波数をFmとすると
Fm=(N+1/4)*F0 (N=0,1,2,・・・)
という関係がある。Nをロックの次数と言う。
上記の場合F0=100MHz、N=0としてFm=25MHzとなるが、これ以外に125MHz、225MHz・・・においてもロックが成立する。
【0016】
以上の構成および動作はPLLとして知られたものであり、各回路の設計手法はPLLの設計手法に準ずる。
【0017】
以上基本的な構成で説明したが、以下のような問題がある。
1)例えば距離を0.3mとしたときFmは最低でも125MHzとなる。この程度の周波数は現在の高速素子で実現可能であるが、消費電流等の問題があり簡便とは言えない。
2)広い範囲の距離を測定するためには電圧制御発信器の発信周波数範囲は少なくとも2倍は必要である。これも実現可能であるが簡便とは言えない。
3)説明では電子回路の遅延は無視したが現実には遅延があり、これがFmに直接影響する。さらに遅延の温度による変動も無視できない。
3)距離が大きくなった場合のロックの次数が不明である。
【0018】
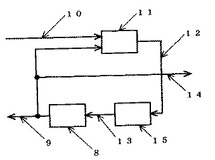
上記1)2)の問題を解決した実施例を図6に示す。同図において8〜15の構成は図2と同じであるが、変調信号9と駆動信号17の間に遅延素子16が挿入され、図1の発光素子2は駆動信号17により駆動される。
【0019】
いま遅延素子を含む電子回路の遅延時間を200ns、光路による遅延を0ns(距離0m)とし、N=5とすればFm=26.25MHzとなる。これは至近距離においてもFmの極端な増加が回避されることを意味し、前記1)の問題が解決される。
【0020】
さらにFmを26.25MHzに固定してN=6となるT0を求めると約238nsとなる。このときのT0の増加は約38nsであり、行路長にして約11.4m(距離約5.7m)に相当する。逆にN=5を維持して対象物をこの距離まで離したときのFmは22.05MHzとなる。すなわち距離0mから約5.7mまではN=5を維持する事によりFmは26.25MHzから22.05MHzまで変化する。それ以上の距離ではN=6とする事によりFmは再び26.25MHzとなる。よって電圧制御発信器8の周波数範囲は少なくとも22.05MHzから26.25MHzであれば良く、前記2)の問題が解決される。
【0021】
一般に距離0mにおけるロックの次数をNa、ロック周波数をFa、距離xにおけるロックの次数をNx、ロック周波数をFx、光速をCとおけば
x=C*(((Nx+1/4)/Fx)−((Na+1/4)/Fa))/2
と言う関係がある。
そこであらかじめ既知の距離sにおけるNsとFsを測定すれば
Fa=(Na+1/4)/(((Ns+1/4)/Fs)−(2*s/C))
よりFaを決定できる。ただしNaは設計上の固定値とする。
【0022】
なおこの例では電子的な遅延素子16を発光素子2の前に挿入したが、受光素子7から位相比較器12の間に挿入しても同じであり、さらに光学的な遅延手段を光路内に挿入しても同じ効果が得られることは自明である。
【0023】
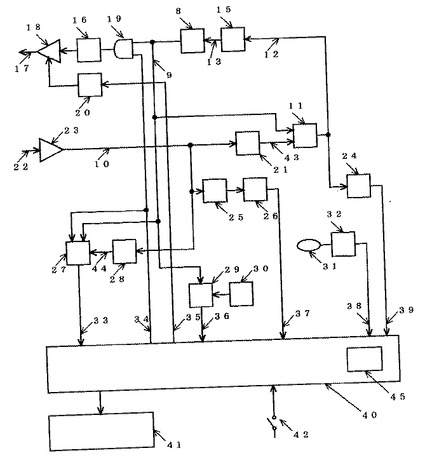
図7にすべての問題を解決したより具体的な実施例を示す。同図において電圧制御発信器8の出力は変調信号9としてゲート素子19により制御されて遅延素子16に至り遅延されて駆動回路18に入力され、レベルを調節されて駆動信号17として発光素子2を駆動する。ここにゲート素子19は変調制御信号34を’L’とする事により変調を停止する機能を持つ。また駆動回路18は光量調節DAコンバーター20の出力により発光素子2の光量を調節する機能を持つ。受光素子7より出力される受光信号22は増幅器23により増幅されて受信信号10となり、さらに波形整形回路21により一定振幅の受信位相信号43となって位相比較器11に入力される。位相比較器11の他方の入力は変調信号9に接続される。位相比較器11の出力は位相信号12としてループフィルター15に入力され、周波数制御信号13に変換されて電圧制御発信器8に入力される。増幅器23は外乱光やノイズの影響を除去するため変調信号9の周波数帯域のみを通過させるバンドパス特性を持つ。
【0024】
さらに受信信号10は受信レベル検出回路25に入力されその出力は受信レベルADコンバーター26に入力されて受信レベルデーター37に変換される。さらに受信信号10は受信信号検出回路28にも入力され受信信号検出信号44に変換される。ここに受信信号検出信号44は受信信号が有る場合は’H’無い場合は’L’とする。
【0025】
波数計数回路27は変調信号9の波数を計数する機能を持ち、変調制御信号34が’H’のときはリセットされ変調制御信号34が’L’でかつ受信信号検出信号44が’H’のとき計数を行い、受信信号検出信号44が’L’となったとき計数を停止してその計数値を波数データー33として出力する。
【0026】
周波数カウンター29は基準クロック発信器30の出力信号により正確なゲート信号を生成し、一定時間内の変調信号9の波数を計数して周波数データー36として出力する。
【0027】
位相信号12はロック検出ADコンバーター24に入力されロック検出データー39に変換される。さらに温度測定ADコンバーター32にはサーミスター31が接続されその値は温度データー38に変換される。
【0028】
マイクロコンピューター40には波数データー33・周波数データー36・受信レベルデーター37・温度データー38およびロック検出データー39の各データーが入力され、変調制御信号34および光量調節データー35が出力される。さらに測定値を表示する表示器41および本装置を操作するための測定指令スイッチ42が接続される。
【0029】
さらにマイクロコンピューター40の記憶装置には温度補正テーブル45が保持される。
【0030】
マイクロコンピューター40のプログラムにおいて波数データー33はロックの次数として周波数データー36とともに測定値の算出に使用される。また測定に先立って受信レベルデーター37を参照し、受信レベルが一定値となるよう光量調節データー35を設定する。さらに温度データー38は測定値の温度補正に使用される。ロック検出データー39は系のロックの判定に使用し、あらかじめ決められた時間一定の範囲内に入っていればロックしたと判定される。
【0031】
図8に温度補正テーブルの例を示す。同図において各行はあらかじめ決められた温度に対応する。
第1列のデーターは各温度における温度データーである。この値は実際に装置を各温度に設定して決定する。
第2列のデーターは補正データーであり各温度における距離0mの場合の周波数(単位Hz)である。この値は実際に装置を各温度に設定し、既知の距離を測定して決定する。
【0032】
例えば温度データーとして100の値が得られた場合、その値は第1列第2行と第3行の間になる。これを直線補間して第2列の値を求めると26224092Hzとなる。この値をFaとする。距離0mにおける波数データーを5と仮定する。現在の周波数データーをFx(単位Hz)および波数データーをNxとし、光速をCとすると求める距離xは
x=C*(((Nx+0.25)/Fx)−(5.25/Fa))/2
より算出できる。
ここにFaは各温度における回路の遅延が反映されているので回路による遅延誤差および温度による変動が補正される。
なお説明のためFaおよびFxの単位をHzとしたが、周波数カウンター29のゲート時間等により適宜変換する必要がある。
【0033】
図9にプログラムのフローチャートを示す。
【0034】
以上温度補正テーブル45を用いることにより前記3)の問題が解決され、波数データー33よりロックの次数が判明し、前記4)の問題が解決される。
【発明の効果】
【0035】
以上により距離を周波数に対応させて測定することが可能であることが明らかになった。言うまでもなくディジタル技術において周波数はもっとも安定で扱いやすい情報である。距離情報をこの周波数情報に変換することにより簡便にかつ高精度に測定することが可能となる。
【0036】
周波数カウンターはゲート時間内の平均周波数を求めるため本質的に積分動作であり、周波数の短時間の変動は測定結果に大きな影響を与えない。これはPLLの動作に対して通信分野などで要求される厳密なロックは不要であることを意味し、ノイズなどに対する配慮も緩やかになる。
【0037】
また図6の実施例に示すように本装置内の主要なアナログ信号は受光信号・受信信号・位相信号および周波数制御信号であり、従来技術のような複雑なアナログ処理は必要ない。これは装置の安定性に大きく寄与する。
【0038】
本装置においてロックが成立している状態では周波数は連続して距離に対応する。従って移動物体の距離測定も可能でさらに時間微分することにより速さの測定も可能である。
【図面の簡単な説明】
【図1】光学系の概略図
【図2】基本的な実施例のブロック図
【図3】位相比較器の例
【図4】ループフィルターの例
【図5】電圧制御発信器の例
【図6】改良した実施例のブロック図
【図7】具体的な実施例のブロック図
【図8】温度補正テーブルの例
【図9】具体的な実施例のプログラムフローチャート
【符号の説明】
1 対象物 2 発光素子 3 照射レンズ 4 照射光 5 反射光
6 受光レンズ 7 受光素子 8 電圧制御発信器 9 変調信号
10 受信信号 11 位相比較器 12 位相信号 13 周波数制御信号
14 出力信号 15 ループフィルター 16 遅延素子 17 駆動信号
18 駆動回路 19 ゲート素子 20 光量調節DAコンバーター
21 波形整形回路 22 受光信号 23 受信増幅器
24 ロック検出ADコンバーター 25 受信レベル検出回路
26 受信レベルADコンバーター 27 波数計数回路 28 受信信号検出回路
29 周波数カウンター 30 基準クロック発信器 31 サーミスター
32 温度測定ADコンバーター 33 波数データー 34 変調制御信号
35 光量調節データー 36 周波数データー 37 受信レベルデーター
38 温度データー 39 ロック検出データー 40 マイクロコンピューター
41 表示器 42 測定指令スイッチ 43 受信位相信号
44 受信信号検出信号 45 温度補正テーブル
【技術分野】
【0001】
本発明は光を変調して測定対象に照射しその反射光を検出して照射光の変調信号と受信信号の関係により距離を測定する装置に関する。
【発明の詳細な説明】
【発明が解決しようとする課題】
【0002】
従来のこの種の装置は1乃至数種類の固定周波数の変調信号を用い、変調信号と受信信号の位相差を距離に対応させるものである。
【0003】
しかしこの方法では例えば1.5m程度の距離を測定するためには最低でも10MHz程度の変調信号が必要となり、直接十分な精度で位相差を測定することが困難である。
【0004】
このため高精度のものは位相差を保存したまま周波数変換によって低い周波数に変換して位相差を測定しているが、電子回路が複雑になり安定に十分な精度を得るためには高価なものとなる。
【課題を解決するための手段】
【0005】
請求項1の発明は周波数を固定して位相差を距離に対応させるのではなく位相差を固定して周波数を可変とし、PLLの技術を用いることにより目標位相差を実現する周波数を距離に対応させるものである。
【0006】
請求項2の発明はPLLが電圧制御発信器より対象物を経由して位相比較器に至る経路の総遅延時間の整数分の1となる周期の周波数でも位相ロックする性質を積極的に応用して前記経路中に既知遅延時間の遅延手段を挿入し、電圧制御発信器に要求される発信周波数が短距離の測定ほど周波数が高くなる不都合を解決しかつ要求される周波数可変範囲を狭くするものである。
【実施例】
【0007】
図1に光学系の例を示す。同図において発光素子2より射出された照射光4は照射レンズ3により調整されて対象物1に照射される。対象物1により反射された反射光5は受光レンズ6により集光されて受光素子7に至る。この間の光の行路長は対象物との距離の2倍となる。
【0008】
図2に本発明の基本的な実施例を示す。同図において電圧制御発信器8の出力信号は変調信号9として図1の発光素子2を駆動し同時に位相比較器11に入力され、かつ出力信号14として外部に出力される。さらに図1の受光素子7により検出された信号は受信信号10として位相比較器11の他方の入力に接続される。位相比較器はその二つの入力の位相を比較し位相差に対応した位相信号14を出力する。位相信号14はループフィルター15に入力され周波数制御信号13に変換されて電圧制御発信器8の周波数制御入力に接続される。
【0009】
図3(A)に位相比較器の例を示す。この例では位相比較素子として二つの入力の排他的論理和を出力する論理素子を用い、その出力は平滑抵抗および平滑コンデンサーより構成される平滑回路により高周波成分が除去され位相信号12となる。図3(B)にこの回路の位相差に対する位相信号の関係を示す。
【0010】
図4にループフィルターの例を示す。これは一種の積分回路で、ループ全体の負帰還が成立しているときは入力の位相信号が基準電圧であるVCC/2となるように出力の周波数制御信号を制御する。
【0011】
図5(A)に電圧制御発信器の例を示す。この回路はコルピッツ発信回路であり周波数の制御は可変容量ダイオードによる。図5(B)にこの回路の周波数制御信号13と発信周波数の関係を示す。
【0012】
以下説明のため光の速さC=300,000,000m/sとし、電子回路の遅延は無視する。
例として対象物との距離を1.5mとすると光の行路長は3mとなり変調信号の変化は10ns後に位相比較器に至る。
【0013】
いま電圧制御発信器8の発信周波数を20MHz(周期50ns)とする。このとき変調信号9と受信信号10の位相差は(10ns/50ns)*360度=72度となり90度よりも小さい。このため図3(B)より位相信号12はVCC/2よりも小さくなる。この位相信号がループフィルター15に印可されると基準電圧であるVCC/2よりも小さいため周波数制御信号13は徐々に上昇する。すると図5(B)に示すように電圧制御発信器8の発信周波数は上昇して相対的な位相差は大きくなり、やがて90度に達して系はロックする。
【0014】
同様に電圧制御発信器8の発信周波数を30MHz(周期約33ns)とする。このとき変調信号9と受信信号10の位相差は(10ns/33ns)*360度=108度となり90度よりも大きい。このため図3(B)より位相信号12はVCC/2よりも大きくなる。この位相信号12がループフィルター15に印可されると基準電圧であるVCC/2よりも大きいため周波数制御信号13は徐々に降下する。すると図5(B)に示すように電圧制御発信器8の発信周波数は降下して相対的な位相差は小さくなり、やはり90度に達して系はロックする。このときの周波数は25MHzである。
【0015】
一般的に位相比較器における二つの入力の時間差をT0とし、T0を周期とする周波数をF0(=1/T0)、ロックが成立する変調信号の周波数をFmとすると
Fm=(N+1/4)*F0 (N=0,1,2,・・・)
という関係がある。Nをロックの次数と言う。
上記の場合F0=100MHz、N=0としてFm=25MHzとなるが、これ以外に125MHz、225MHz・・・においてもロックが成立する。
【0016】
以上の構成および動作はPLLとして知られたものであり、各回路の設計手法はPLLの設計手法に準ずる。
【0017】
以上基本的な構成で説明したが、以下のような問題がある。
1)例えば距離を0.3mとしたときFmは最低でも125MHzとなる。この程度の周波数は現在の高速素子で実現可能であるが、消費電流等の問題があり簡便とは言えない。
2)広い範囲の距離を測定するためには電圧制御発信器の発信周波数範囲は少なくとも2倍は必要である。これも実現可能であるが簡便とは言えない。
3)説明では電子回路の遅延は無視したが現実には遅延があり、これがFmに直接影響する。さらに遅延の温度による変動も無視できない。
3)距離が大きくなった場合のロックの次数が不明である。
【0018】
上記1)2)の問題を解決した実施例を図6に示す。同図において8〜15の構成は図2と同じであるが、変調信号9と駆動信号17の間に遅延素子16が挿入され、図1の発光素子2は駆動信号17により駆動される。
【0019】
いま遅延素子を含む電子回路の遅延時間を200ns、光路による遅延を0ns(距離0m)とし、N=5とすればFm=26.25MHzとなる。これは至近距離においてもFmの極端な増加が回避されることを意味し、前記1)の問題が解決される。
【0020】
さらにFmを26.25MHzに固定してN=6となるT0を求めると約238nsとなる。このときのT0の増加は約38nsであり、行路長にして約11.4m(距離約5.7m)に相当する。逆にN=5を維持して対象物をこの距離まで離したときのFmは22.05MHzとなる。すなわち距離0mから約5.7mまではN=5を維持する事によりFmは26.25MHzから22.05MHzまで変化する。それ以上の距離ではN=6とする事によりFmは再び26.25MHzとなる。よって電圧制御発信器8の周波数範囲は少なくとも22.05MHzから26.25MHzであれば良く、前記2)の問題が解決される。
【0021】
一般に距離0mにおけるロックの次数をNa、ロック周波数をFa、距離xにおけるロックの次数をNx、ロック周波数をFx、光速をCとおけば
x=C*(((Nx+1/4)/Fx)−((Na+1/4)/Fa))/2
と言う関係がある。
そこであらかじめ既知の距離sにおけるNsとFsを測定すれば
Fa=(Na+1/4)/(((Ns+1/4)/Fs)−(2*s/C))
よりFaを決定できる。ただしNaは設計上の固定値とする。
【0022】
なおこの例では電子的な遅延素子16を発光素子2の前に挿入したが、受光素子7から位相比較器12の間に挿入しても同じであり、さらに光学的な遅延手段を光路内に挿入しても同じ効果が得られることは自明である。
【0023】
図7にすべての問題を解決したより具体的な実施例を示す。同図において電圧制御発信器8の出力は変調信号9としてゲート素子19により制御されて遅延素子16に至り遅延されて駆動回路18に入力され、レベルを調節されて駆動信号17として発光素子2を駆動する。ここにゲート素子19は変調制御信号34を’L’とする事により変調を停止する機能を持つ。また駆動回路18は光量調節DAコンバーター20の出力により発光素子2の光量を調節する機能を持つ。受光素子7より出力される受光信号22は増幅器23により増幅されて受信信号10となり、さらに波形整形回路21により一定振幅の受信位相信号43となって位相比較器11に入力される。位相比較器11の他方の入力は変調信号9に接続される。位相比較器11の出力は位相信号12としてループフィルター15に入力され、周波数制御信号13に変換されて電圧制御発信器8に入力される。増幅器23は外乱光やノイズの影響を除去するため変調信号9の周波数帯域のみを通過させるバンドパス特性を持つ。
【0024】
さらに受信信号10は受信レベル検出回路25に入力されその出力は受信レベルADコンバーター26に入力されて受信レベルデーター37に変換される。さらに受信信号10は受信信号検出回路28にも入力され受信信号検出信号44に変換される。ここに受信信号検出信号44は受信信号が有る場合は’H’無い場合は’L’とする。
【0025】
波数計数回路27は変調信号9の波数を計数する機能を持ち、変調制御信号34が’H’のときはリセットされ変調制御信号34が’L’でかつ受信信号検出信号44が’H’のとき計数を行い、受信信号検出信号44が’L’となったとき計数を停止してその計数値を波数データー33として出力する。
【0026】
周波数カウンター29は基準クロック発信器30の出力信号により正確なゲート信号を生成し、一定時間内の変調信号9の波数を計数して周波数データー36として出力する。
【0027】
位相信号12はロック検出ADコンバーター24に入力されロック検出データー39に変換される。さらに温度測定ADコンバーター32にはサーミスター31が接続されその値は温度データー38に変換される。
【0028】
マイクロコンピューター40には波数データー33・周波数データー36・受信レベルデーター37・温度データー38およびロック検出データー39の各データーが入力され、変調制御信号34および光量調節データー35が出力される。さらに測定値を表示する表示器41および本装置を操作するための測定指令スイッチ42が接続される。
【0029】
さらにマイクロコンピューター40の記憶装置には温度補正テーブル45が保持される。
【0030】
マイクロコンピューター40のプログラムにおいて波数データー33はロックの次数として周波数データー36とともに測定値の算出に使用される。また測定に先立って受信レベルデーター37を参照し、受信レベルが一定値となるよう光量調節データー35を設定する。さらに温度データー38は測定値の温度補正に使用される。ロック検出データー39は系のロックの判定に使用し、あらかじめ決められた時間一定の範囲内に入っていればロックしたと判定される。
【0031】
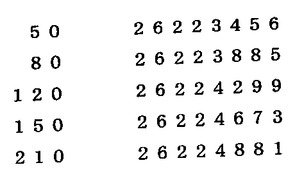
図8に温度補正テーブルの例を示す。同図において各行はあらかじめ決められた温度に対応する。
第1列のデーターは各温度における温度データーである。この値は実際に装置を各温度に設定して決定する。
第2列のデーターは補正データーであり各温度における距離0mの場合の周波数(単位Hz)である。この値は実際に装置を各温度に設定し、既知の距離を測定して決定する。
【0032】
例えば温度データーとして100の値が得られた場合、その値は第1列第2行と第3行の間になる。これを直線補間して第2列の値を求めると26224092Hzとなる。この値をFaとする。距離0mにおける波数データーを5と仮定する。現在の周波数データーをFx(単位Hz)および波数データーをNxとし、光速をCとすると求める距離xは
x=C*(((Nx+0.25)/Fx)−(5.25/Fa))/2
より算出できる。
ここにFaは各温度における回路の遅延が反映されているので回路による遅延誤差および温度による変動が補正される。
なお説明のためFaおよびFxの単位をHzとしたが、周波数カウンター29のゲート時間等により適宜変換する必要がある。
【0033】
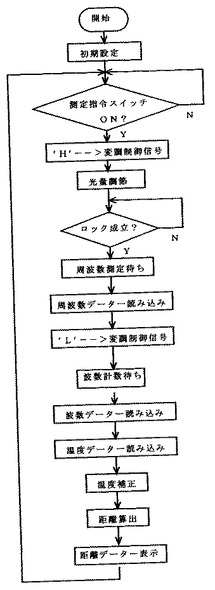
図9にプログラムのフローチャートを示す。
【0034】
以上温度補正テーブル45を用いることにより前記3)の問題が解決され、波数データー33よりロックの次数が判明し、前記4)の問題が解決される。
【発明の効果】
【0035】
以上により距離を周波数に対応させて測定することが可能であることが明らかになった。言うまでもなくディジタル技術において周波数はもっとも安定で扱いやすい情報である。距離情報をこの周波数情報に変換することにより簡便にかつ高精度に測定することが可能となる。
【0036】
周波数カウンターはゲート時間内の平均周波数を求めるため本質的に積分動作であり、周波数の短時間の変動は測定結果に大きな影響を与えない。これはPLLの動作に対して通信分野などで要求される厳密なロックは不要であることを意味し、ノイズなどに対する配慮も緩やかになる。
【0037】
また図6の実施例に示すように本装置内の主要なアナログ信号は受光信号・受信信号・位相信号および周波数制御信号であり、従来技術のような複雑なアナログ処理は必要ない。これは装置の安定性に大きく寄与する。
【0038】
本装置においてロックが成立している状態では周波数は連続して距離に対応する。従って移動物体の距離測定も可能でさらに時間微分することにより速さの測定も可能である。
【図面の簡単な説明】
【図1】光学系の概略図
【図2】基本的な実施例のブロック図
【図3】位相比較器の例
【図4】ループフィルターの例
【図5】電圧制御発信器の例
【図6】改良した実施例のブロック図
【図7】具体的な実施例のブロック図
【図8】温度補正テーブルの例
【図9】具体的な実施例のプログラムフローチャート
【符号の説明】
1 対象物 2 発光素子 3 照射レンズ 4 照射光 5 反射光
6 受光レンズ 7 受光素子 8 電圧制御発信器 9 変調信号
10 受信信号 11 位相比較器 12 位相信号 13 周波数制御信号
14 出力信号 15 ループフィルター 16 遅延素子 17 駆動信号
18 駆動回路 19 ゲート素子 20 光量調節DAコンバーター
21 波形整形回路 22 受光信号 23 受信増幅器
24 ロック検出ADコンバーター 25 受信レベル検出回路
26 受信レベルADコンバーター 27 波数計数回路 28 受信信号検出回路
29 周波数カウンター 30 基準クロック発信器 31 サーミスター
32 温度測定ADコンバーター 33 波数データー 34 変調制御信号
35 光量調節データー 36 周波数データー 37 受信レベルデーター
38 温度データー 39 ロック検出データー 40 マイクロコンピューター
41 表示器 42 測定指令スイッチ 43 受信位相信号
44 受信信号検出信号 45 温度補正テーブル
【特許請求の範囲】
【請求項1】
対象物に変調光を照射しその反射光を検出して対象物との距離を測定する装置であって、照射光を変調する信号源に電圧制御発信器を用い、かつ位相比較器を用いて変調信号と受信信号の位相差が一定になるよう前記電圧制御発信器の発信周波数を制御することを特徴とする距離測定装置。
【請求項2】
前記重圧制御発信器より対象物を経由して位相比較器に至る経路に既知遅延時間の遅延手段を有することを特徴とする請求項1に記載の距離測定装置
【請求項1】
対象物に変調光を照射しその反射光を検出して対象物との距離を測定する装置であって、照射光を変調する信号源に電圧制御発信器を用い、かつ位相比較器を用いて変調信号と受信信号の位相差が一定になるよう前記電圧制御発信器の発信周波数を制御することを特徴とする距離測定装置。
【請求項2】
前記重圧制御発信器より対象物を経由して位相比較器に至る経路に既知遅延時間の遅延手段を有することを特徴とする請求項1に記載の距離測定装置
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−93567(P2007−93567A)
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願番号】特願2005−310469(P2005−310469)
【出願日】平成17年9月27日(2005.9.27)
【出願人】(503387385)
【Fターム(参考)】
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願日】平成17年9月27日(2005.9.27)
【出願人】(503387385)
【Fターム(参考)】
[ Back to top ]