
距離測定装置
【課題】距離測定装置において、測定期間の延長及び製造コストを抑えながら、測定可能な距離範囲を近距離側にも遠距離側にも拡げる。
【解決手段】距離測定装置においては、周波数制御回路により周波数掃引される送信波と反射波との合成波のパワーが検出され、その検出信号が、分析回路により、特定の処理期間、サンプリングされ、その周波数成分が分析される。そして、その分析結果を基に距離が算出される。上記周波数制御回路は、周波数掃引幅が互いに異なる掃引パターンP1、P2、P3の各々に従って掃引する。従って、測定対象物までの距離が、近、中、遠距離のいずれであっても、上記検出信号の周波数を、分析回路により分析可能な周波数範囲内に収めることができ、各距離を測定することができる。しかも、近/遠距離側の測定範囲を拡げるために、上記処理期間を延ばしたり、分析回路を高速度の演算が可能なものにしたりしなくて済む。
【解決手段】距離測定装置においては、周波数制御回路により周波数掃引される送信波と反射波との合成波のパワーが検出され、その検出信号が、分析回路により、特定の処理期間、サンプリングされ、その周波数成分が分析される。そして、その分析結果を基に距離が算出される。上記周波数制御回路は、周波数掃引幅が互いに異なる掃引パターンP1、P2、P3の各々に従って掃引する。従って、測定対象物までの距離が、近、中、遠距離のいずれであっても、上記検出信号の周波数を、分析回路により分析可能な周波数範囲内に収めることができ、各距離を測定することができる。しかも、近/遠距離側の測定範囲を拡げるために、上記処理期間を延ばしたり、分析回路を高速度の演算が可能なものにしたりしなくて済む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測定対象物までの距離をレーダ波又は超音波を用いて測定する距離測定装置に関する。
【背景技術】
【0002】
従来から、レーダ波又は超音波を利用して測定対象物までの距離を測定する技法として、定在波方式と、FM−CW方式とが知られており、それぞれの方式の距離測定装置が知られている。
【0003】
いずれの方式の距離測定装置においても、信号源の発振周波数が掃引され、その掃引された発振周波数と同じ周波数の送信波が測定対象物に放射され、送信波と、その送信波が測定対象物で反射して生じた反射波との合成波が検出される。そして、その検出信号が増幅され、サンプリングされ、周波数分析され、その分析結果に基づいて測定対象物までの距離が算出される。
【0004】
上記2方式における相違点は、送信波の周波数(以下、送信周波数という)の掃引の仕方である。従って、上記2方式においては、送信波と反射波との合成波形が異なり、合成波の検出部分、及び、検出信号に対する分析内容等も相違する。
【0005】
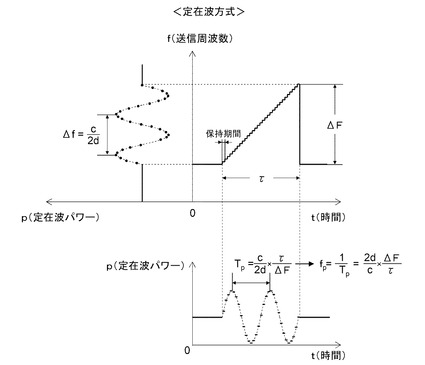
以下、上記2方式の距離測定技法について詳述する。図8は、従来及び本発明の定在波方式による距離測定原理を示す。図8における上側の図において、第1象限の横軸は時間tを示し、縦軸は送信周波数fを示し、第2象限の横軸は任意の検出地点において検出される定在波のパワーpを表す。上記検出地点は、送信波の放射地点と測定対象物とを通る直線上の任意の地点である。
【0006】
この方式においては、送信周波数fの一定期間の保持と一定幅の上昇とが繰り返されるように送信周波数fが掃引される。この掃引により、送信周波数fが階段状に変調される(上記第1象限参照)。各周波数fにおける一定の保持期間は、レーダ波又は超音波が測定対象物までの間を伝搬して往復するのに必要な時間よりも長く設定されており、その保持期間毎に、送信波と、上記往復により位相が遅延した反射波とが干渉し、合成波として定在波が生成される。
【0007】
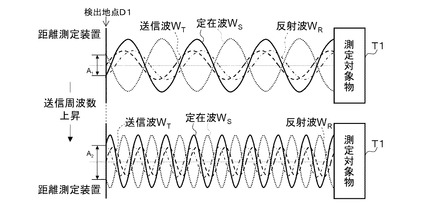
上記検出地点における定在波パワーpは、送信周波数の掃引に応じて周期的に増減する(上記第2象限参照)。この原理について図9を参照して説明する。ここでは、送信周波数が上昇するとする。この上昇により、検出地点D1と測定対象物T1との間の送信波WT及び反射波WRの波数は増え、そのため、定在波WSの波数が増加し、検出地点D1における定在波WSの位相が変位する。これにより、検出地点D1における定在波WSの振幅がA1からA2に変わり、振幅に比例する定在波パワーpが変化する。従って、送信周波数の掃引により、検出地点D1における定在波WSの位相が2π以上掃引されると、定在波パワーpは周期性を持つようになる。
【0008】
ここに、送信周波数の掃引による定在波パワーpの変動周期と、測定対象物T1までの距離と、光速とを、それぞれ、Δf、d、cとすると、下記の式(1)の関係式が成立する。
【0009】
【数1】

【0010】
従って、変動周期Δfを求めることにより、距離dを算出することができる。ところで、定在波パワーpを、任意の期間、検出すると、定在波パワーpの時系列信号(以下、定在波パワー信号という)が得られ、定在波パワーpを時間関数として表すことができる。しかしながら、上記式(1)は時間を変数に含まないので、定在波パワー信号と、式(1)とだけから、距離dを算出することはできない。
【0011】
そこで、上記式(1)を時間領域の数式に変換することが考えられる。ここに、変動周期Δfに対応する期間と、送信周波数の掃引幅と、掃引期間とを、それぞれ、Tp、ΔF、τとすると、下記式(2)が求まる(図8参照)。
【0012】
【数2】
【0013】
上記式(2)に上記式(1)を代入し、また、定在波パワー信号の周波数をfp(=1/Tp)とすると、周波数fpについての下記式(3)が導き出される。
【0014】
【数3】
【0015】
従って、定在波パワー信号の周波数fpを計測し、その計測値と、予め設定された掃引幅ΔF及び掃引期間τと、光速cとを、上記式(3)に代入することにより、距離dを求めることができる。
【0016】
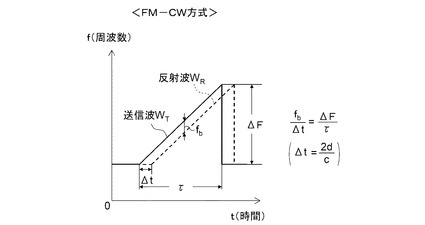
次に、図10を参照して、従来及び本発明のFM−CW方式による距離測定原理を説明する。この方式における送信波WTは、その周波数を掃引期間τに周波数掃引幅ΔFだけ連続掃引することにより、鋸波状にFM変調された連続波(CW波)である。反射波WRは、送信波WTに対して時間的に遅れるが、その遅延時間Δtは、レーダ波又は超音波が測定対象物までの距離dの空間を往復するのに必要な時間である。この遅延により送信波WTと反射波WRとの周波数には差が生じる。ここに、この周波数差、すなわち、ビート周波数をfbとすると、下記式(4)の関係式が成り立つ。
【0017】
【数4】
【0018】
遅延時間Δtは、Δt=2d/c(c:光速)と表され、この式を上記式(4)に代入すると、ビート周波数fbと距離dとの関係を示す下記式(5)が求められる。
【0019】
【数5】
【0020】
従って、ビート周波数fbを測定し、上記式(5)に代入することにより、距離dを割り出すことができる。ビート周波数fbは、送信波WTと反射波WRとの合成波から計測することができる。
【0021】
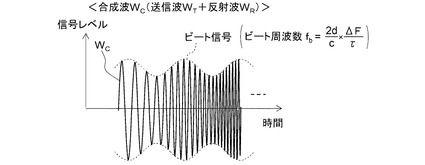
図11は、上記合成波WCの波形を示す。送信周波数が掃引されると、合成波WCにはうなりが生じ、合成波WCの振幅は、ビート周波数fbでもって増大、減少を繰り返す。そのため、合成波WCを例えば包絡線検波することにより、合成波WCから上記うなりの信号、すなわち、ビート信号を抽出して、その周波数を計測することにより、ビート周波数fbを得ることができ、上記式(5)から距離dを算出することができる。
【0022】
ところで、上記式(3)及び式(5)に示されるように、定在波パワー信号の周波数fpとビート信号のビート周波数fbとは距離dに応じて変化し、例えば、測定対象物が近いと低くなり、遠いと高くなる。そして、定在波パワー信号/ビート信号は、一般に、周波数成分分析回路(以下、分析回路という)等により、有限のサンプリング処理期間中にサンプリングされ、離散化され、さらに、それらの離散値が高速フーリエ変換(FFT)され、これにより、定在波パワー信号の周波数fp/ビート信号のビート周波数fbが計測される。
【0023】
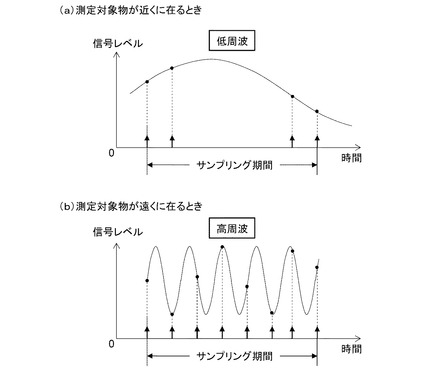
従って、従来の上記2方式のいずれの距離測定装置においても、測定対象物が装置に近過ぎると、図12(a)に示されるように、定在波パワー信号の周波数fp/ビート信号のビート周波数fbが低くなり過ぎて、上記サンプリング処理期間に、定在波パワー信号/ビート信号を1波長以上、サンプリングすることができないことがある。そのため、周波数fp/ビート周波数fbを正確に求められないことがある。
【0024】
一方、測定対象物が装置から遠過ぎると、図12(b)に示されるように、周波数fp/ビート周波数fbが高くなり過ぎて、サンプリング周波数の1/2以上になることがある。そのため、ナイキストのサンプリング定理が満たされず、エイリアシングが発生し、周波数fp/ビート周波数fbの高精度な算出が困難なことがある。
【0025】
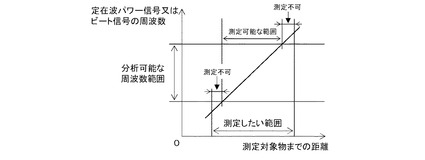
すなわち、図13に示されるように、装置から測定対象物までの距離が、上記分析回路等により分析可能な周波数範囲に対応した距離範囲よりも短いか、又は長いと、上記の距離に応じた周波数の定在波パワー信号/ビート信号が得られたとしても、その周波数を計測することができず、従って、距離測定が困難になる。そのため、測定可能な距離範囲を近距離側にも遠距離側にも拡げたいという要望があった。
【0026】
そこで、上記要望に応えるため、上記分析回路において、上記サンプリング処理期間を長くし、かつ、上記サンプリング周波数を高くすることが考えられる。しかしながら、サンプリング処理期間が長くなると、測定に要する期間(以下、測定期間という)が長くなってしまう。また、サンプリング周波数が高周波になると、計算量が膨大になって計算時間が長くなり、従って、測定期間が長くなるので、それを防ぐには、高速度の演算が可能な高性能な分析回路が必要になり、製造コストが上がってしまう。
【0027】
ところで、送信信号の周波数をシフトし、目標対象で反射された反射波を基に目標対象までの距離を測定し、目標対象が近ければ送信信号の周波数シフトを大きくし、遠ければ周波数シフトを小さくして再測定する距離測定システムが知られている(例えば、特許文献1参照)。この距離測定システムにおいては、周波数シフトを大きく、又は小さくすることにより、測定対象が近距離又は遠距離の範囲に特化され、各距離の範囲の測定精度が向上する。
【0028】
また、測定対象物までの距離をFM−CW方式により測定し、その測定された距離が基準距離未満であれば、定在波方式により距離を測定し直すレーダ装置が知られている(例えば、特許文献2参照)。また、3種類以上の周波数変調がなされた送信信号を分割して放射し、目標で反射された受信波と上記送信信号とを混合してビート信号を生成し、このビート信号を基に目標までの距離を算出するレーダ装置が知られている(例えば、特許文献3参照)。しかしながら、上記の距離測定システム及びレーダ装置においては、上記問題を解決することは困難である。
【先行技術文献】
【特許文献】
【0029】
【特許文献1】特表2003−505699号公報
【特許文献2】特開2009−058335号公報
【特許文献3】特開2009−288223号公報
【発明の概要】
【発明が解決しようとする課題】
【0030】
本発明は、上記の従来の問題を解決するためになされたものであり、測定期間の延長及び製造コストの増加を抑えながら、測定可能な距離範囲を近距離側にも遠距離側にも拡げることができる距離測定装置を提供することを目的とする。
【課題を解決するための手段】
【0031】
上記目的を達成するために本発明の距離測定装置は、信号源の発振周波数を掃引する周波数掃引部と、前記周波数掃引部により掃引される発振周波数に対応した周波数の送信波を放射する送信部と、前記送信波が測定対象物により反射されて生じた反射波を受信する受信部と、前記送信波と前記反射波との合成波のパワー又は振幅を検出する検出部と、前記検出部による検出信号を特定の処理期間、サンプリングして、その周波数成分を分析する周波数成分分析部と、前記周波数成分分析部による分析結果に基づいて測定対象物までの距離を算出する距離算出部と、を備えた距離測定装置において、前記周波数掃引部は、前記発振周波数の掃引幅が互いに異なる複数の掃引パターンを予め記憶しており、それらの掃引パターンのうち、掃引幅が広い掃引パターンから順に、その掃引パターンに従って掃引することを特徴とすることを特徴とする。
【0032】
この距離測定装置においては、前記周波数掃引部は、前記掃引パターンに従った掃引を開始した後、前記距離算出部が距離を最初に算出すると、次の順以降の掃引パターンによる掃引を中止することが望ましい。
【発明の効果】
【0033】
本発明によれば、記憶された掃引パターンのいずれかに従った掃引により、測定対象物までの距離に比例する検出信号の周波数を、測定対象物までの距離に係わらず、周波数成分分析部により分析可能な周波数範囲内に収めることができる。従って、測定可能な距離範囲を近距離側にも遠距離側にも拡げることができる。しかも、近距離側の測定範囲を拡げるために低周波の検出信号に対応して周波数成分分析部の処理期間を延ばさなくて済むので、測定期間の延長を防ぐことができる。また、遠距離側の測定範囲を拡げるために高周波の検出信号に対応して周波数成分分析部を高速度の演算が可能な高性能なものにしなくて済むので、製造コストを抑えることができる。さらに、近距離から優先的に測定することができる。
【図面の簡単な説明】
【0034】
【図1】本発明の第1の実施形態に係る距離測定装置の電気的ブロック図。
【図2】上記装置における送信周波数の掃引パターンを示す図。
【図3】上記装置における定在波パワーの検出信号の周波数と測定対象物までの距離との関係を示す図。
【図4】上記装置における送信周波数の掃引処理のフローチャート。
【図5】上記実施形態の一変形例に係る距離測定装置の送信周波数の掃引パターンを示す図。
【図6】本発明の第2の実施形態に係る距離測定装置の電気的ブロック図。
【図7】上記装置における送信周波数の掃引パターンを示す図。
【図8】(a)(b)は従来及び本発明の定在波方式による距離測定原理を説明するための図。
【図9】上記方式において送信周波数が上昇したときの任意の地点における定在波パワー変動を示す図。
【図10】従来及び本発明のFM−CW方式による距離測定原理を説明するための図
【図11】上記方式における送信波と反射波との合成波形図。
【図12】(a)(b)は従来の距離測定装置において測定対象物が装置に近過ぎるときと装置から遠過ぎるときの定在波パワー信号/ビート信号波形を示す図。
【図13】上記定在波パワー信号/ビート信号の周波数と測定対象物までの距離との関係を示す図。
【発明を実施するための形態】
【0035】
以下、本発明の各種実施形態に係る距離測定装置について図面を参照して説明する。
(第1の実施形態)
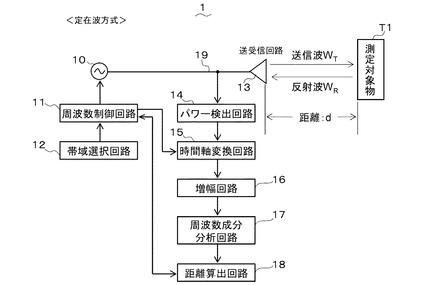
図1は、第1の実施形態に係る距離測定装置の構成を示す。この距離測定装置1は、装置から測定対象物T1までの距離dを定在波方式により測定する距離測定装置である。
【0036】
距離測定装置1は、信号源10と、周波数制御回路11と、帯域選択回路12と、送受信回路13とを備える。周波数制御回路11は、信号源10の発振周波数を掃引する。帯域選択回路12は、上記発振周波数の掃引幅が互いに異なる複数の掃引パターンのいずれかを選択する。送受信回路13は、上記発振周波数に対応した周波数、具体的には、発振周波数と同じ周波数を有するレーダ波又は超音波である送信波WTを放射する。また、送受信回路13は、送信波WTが測定対象物T1により反射されて生じた反射波WRを受信する。
【0037】
また、距離測定装置1は、パワー検出回路14と、時間軸変換回路15と、増幅回路16と、周波数成分分析回路(以下、分析回路という)17と、距離算出回路18とをさらに備える。パワー検出回路14は、送信波WTと反射波WRとの合成波である定在波のパワーを検出する。時間軸変換回路15は、パワー検出回路14による検出信号の時間軸を圧縮又は伸長する。増幅回路16は、時間軸変換回路15により時間軸が圧縮又は伸長された検出信号を増幅し、分析回路17は、増幅後の検出信号の周波数成分を分析する。距離算出回路18は、分析回路17による分析結果から距離dを算出する。
【0038】
信号源10は、例えば電圧制御発振回路等により構成され、周波数制御回路11から信号源10に入力される電圧に対応した周波数で発振し、その発振周波数を有した信号を送受信回路13に出力する。
【0039】
周波数制御回路11(周波数掃引部を構成)は、信号源10への入力電圧を掃引することにより信号源10の発振周波数を掃引し、これにより、送信波WTの周波数(以下、送信周波数という)を掃引する。周波数制御回路11は、予め設定された上記発振周波数の掃引時の下限値に、帯域選択回路12により選択された掃引パターンの周波数掃引幅を加えることにより、発振周波数の上限値を算出する。そして、周波数制御回路11は、上記発振周波数を上記の下限値から上記の上限値までの範囲で、一定の周波数間隔で上昇掃引し、各周波数毎に一定の保持期間だけ、その周波数の値を維持する。この保持期間は、送受信回路13と測定対象物T1との間のレーダ波又は超音波による往復時間よりも長く設定されており、その保持期間毎に、周波数の異なる定在波が発生する。上記掃引処理において、発振周波数は下降掃引されてもよい。ここに、上記周波数掃引幅の掃引に要する期間を掃引期間という。
【0040】
送信周波数は、周波数制御回路11による掃引処理により、上記図8に示されるような階段状に変調される。上記周波数間隔及び保持期間は、それぞれ、1掃引パターンによる掃引中は同じであるが、各掃引パターン毎に、異なっていても、又は同じであってもよい。上記周波数間隔及び保持期間は、図8に図示された例に限定されない。
【0041】
帯域選択回路12(周波数掃引部を構成)は、メモリ及びマイクロプロセッサにより構成され、このメモリには3種類の上記掃引パターンが予め格納されている。各掃引パターンには、周波数掃引幅と、掃引期間とが設定されている。周波数掃引幅は、各掃引パターン毎に互いに異なり、測定したい距離に応じて設定され、詳しくは、その距離が短いほど広く設定されている。各掃引パターンの掃引期間は互いに同じである。上記マイクロプロセッサは、3種類の掃引パターンのうち、周波数掃引幅が広い掃引パターンから順に選択する。上記掃引パターンの種類数は上記に限定されず、また、各掃引パターンの掃引期間は互いに異なっていてもよい。
【0042】
送受信回路13(送信部、受信部)は、パッチアンテナ等により構成される。送受信回路13は、周波数制御回路11により周波数掃引された発振周波数と同じ周波数の送信波WTを測定対象物T1に放射する。また、送受信回路13は、送信波WTが測定対象物T1により反射されて生じた反射波WRを受信する。信号源10と送受信回路13とは、送信波WT及び反射波WRを伝搬するマクロストリップ線路等の信号伝送線路19により電気的に結ばれている。なお、反射波WRは微弱であるので、反射波WRが信号源10の信号発振に与える影響等は無視する。
【0043】
パワー検出回路14(検出部)は、信号伝送線路19中の特定地点における定在波のパワーを検出するダイオード等により構成される。パワー検出回路14による検出信号は、上記定在波パワー信号に相当し、送信周波数が掃引されると、検出値が周期的に変動する。
【0044】
ところで、周波数掃引幅が同じであっても、掃引期間が変われば、すなわち、掃引速度が異なれば、定在波パワー信号の周波数は変わる(図8参照)。従って、掃引期間を考慮した補正をすることなく、定在波パワー信号の周波数から単純に距離dを算出すると、距離dは不正確な値になる。従って、距離dの正確な値を得るためには、定在波パワー信号の時間軸を、掃引期間に応じた圧縮/伸長率で圧縮又は伸長し、掃引期間が基準掃引期間であるときの時間軸に変換する補正が必要になる。
【0045】
そこで、時間軸変換回路15は、帯域選択回路12により選択された掃引パターンの掃引期間の情報を周波数制御回路11から取得し、その取得した掃引期間に応じた圧縮/伸長率で、上記検出信号を時間軸方向に圧縮/伸長し、上記補正を行う。この補正においては、基準掃引期間に対する上記掃引期間の比を求め、その比の逆数を上記圧縮/伸長率とする。
【0046】
増幅回路16は、時間軸変換回路15により時間軸変換された検出信号の波高値が、分析回路17による分解能に応じた値になるよう増幅する。
【0047】
分析回路17(周波数成分分析部)は、増幅回路16により増幅された検出信号をサンプリングし、符号化し、高速フーリエ変換(FFT)することにより、検出信号の周波数を計測する。
【0048】
距離算出回路18(距離算出部)は、分析回路17により計測された検出信号の周波数を基に、上記式(3)を用いて距離dを算出する。この算出処理においては、上記式(3)のfp、ΔF、τに、それぞれ、上記検出信号の周波数、帯域選択回路12により選択された掃引パターンの周波数掃引幅、上記基準掃引期間が代入され、距離dが算出される。距離算出回路18は、上記3種類の掃引パターンによる掃引において、距離dが最初に算出されたとき、その算出を通知する通知信号を周波数制御回路11に送出する。周波数制御回路11は、上記通知信号を、掃引パターンによる掃引後の特定の待ち期間に受信したとき、次の順以降の掃引パターンによる掃引を中止する。
【0049】
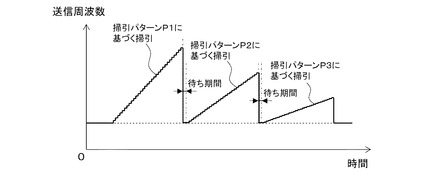
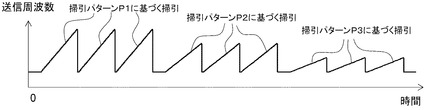
図2は、上記3種類の掃引パターンに基づいて周波数制御回路11により掃引された送信周波数の時間的変化を示す。3種類の掃引パターンP1、P2、P3は、掃引期間が互いに略同じであり、かつ、周波数掃引幅が互いに異なり、従って、周波数掃引幅を掃引期間で除して得られる周波数掃引速度が相違する。送信周波数の下限値は一定なので、各掃引パターンP1、P2、P3による掃引において、掃引される送信周波数の上限値は互いに異なる。各掃引パターンP1、P2、P3は、その周波数掃引幅が、掃引パターンP1で最も広く、次に、掃引パターンP2、P3の順に広く、この順で帯域選択回路12により選択される。掃引パターンP1による掃引後、及び掃引パターンP2による掃引後は、それぞれ、上記待ち期間が経過してから、次の順の掃引パターンに基づく掃引が開始される。
【0050】
ところで、上記式(3)に示されるように、掃引期間τが一定で、距離dが短い又は長いときには、周波数掃引幅ΔFを広く又は狭くすることにより、周波数fp(本実施形態ではパワー検出回路14による検出信号の周波数)を特定の周波数範囲内に収めることができる。
【0051】
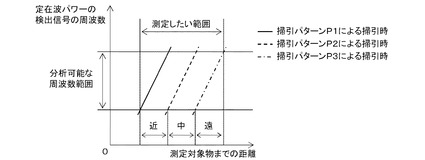
そこで、本実施形態においては、測定したい距離範囲を、近距離、中距離、遠距離(以下、近・中・遠距離という)に分割し、掃引パターンP1、P2、P3の周波数掃引幅(ΔF)を、それぞれ、上記近・中・遠距離に対応した掃引幅に設定する。
【0052】
ここで、この対応関係について説明する。図3に示されるように、測定対象物T1が装置から近距離の位置に在るときには、掃引パターンP1の掃引により生じる上記検出信号の周波数が、分析回路17により分析可能な周波数範囲内に収まるように、掃引パターンP1の周波数掃引幅が設定されている。また、測定対象物T1が中距離の位置に在るときには、掃引パターンP2の掃引により生じる上記検出信号の周波数が上記周波数範囲内に収まるように、掃引パターンP2の周波数掃引幅が設定されている。また、測定対象物T1が遠距離の位置に在るときには、掃引パターンP3の掃引により生じる上記検出信号の周波数が上記周波数範囲内に収まるように、掃引パターンP3の周波数掃引幅が設定されている。
【0053】
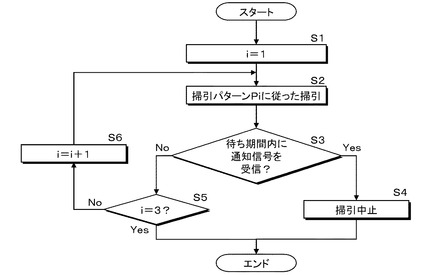
次に、周波数制御回路11における送信周波数の掃引処理について、図2に加えて、図4を参照して説明する。図4は、上記掃引処理の手順を示す。周波数制御回路11は、変数iを1とし(S1)、掃引パターンPiに従った掃引を開始し(S2)、その後の上記待ち期間内に、距離算出回路18からの上記通知信号を受信すると(S3でYes)、次の順以降の掃引パターンによる掃引を中止する(S4)。上記掃引パターンPiによる掃引後、上記待ち期間内に通知信号が受信されず(S3でNo)、かつ、変数i=3でなければ(S5でNo)、周波数制御回路11は、変数iをインクリメントし(S6)、処理をS2に戻す。S5の処理において、変数i=3であれば(S5でYes)、掃引を終了する。
【0054】
本実施形態の距離測定装置1においては、掃引パターンP1、P2、P3のいずれかに従った掃引により、距離dに比例する上記検出信号の周波数を、距離dが近距離、中距離、又は遠距離のいずれであったとしても、上記分析可能な周波数範囲内に収めることができる。従って、測定可能な距離範囲を近距離側にも遠距離側にも拡げることができる。しかも、近距離側の測定範囲を拡げるために低周波の上記検出信号に対応して分析回路17の処理期間を延ばさなくて済むので、測定期間の延長を防ぐことができる。また、遠距離側の測定範囲を拡げるために高周波の上記検出信号に対応して分析回路17を高速度の演算が可能な高性能なものにしなくて済み、また、増幅回路16は高周波対応のものにしなくて済むので、製造コストを抑えることができる。
【0055】
また、近距離から優先的に測定することができる。また、測定対象の距離範囲が、近距離、中距離、遠距離に分割され、掃引パターンP1、P2、P3はそれらの距離にそれぞれ対応しているので、各距離の測定精度の向上を図ることができる。
【0056】
また、現在の(順の)掃引パターンに従った送信周波数掃引により、測定対象物までの距離dが(最初に)算出されたときには、次の順以降の掃引パターンに基づく掃引は中止され、測定対象物までの距離が、この算出された距離dに確定する。従って、距離測定に要する時間を短縮すると共に、距離測定に要する消費電力を削減することができる。
【0057】
本実施形態の距離測定装置1は、例えば、車両に搭載され、その車両の後部又はコーナと壁等の障害物(測定対象物)との距離を測定するバックセンサ又はコーナセンサに適用することができる。距離測定装置1においては、測定対象物までの距離が近距離から優先して測定されるので、車両の近距離に在る障害物を遠距離の障害物よりも早く検知することができる。従って、上記車両に、距離測定装置1による測定結果を音又は光でユーザに通知する通知回路を設けた場合、その通知回路により近距離の障害物の存在を素早く通知することができる。そのため、ユーザが近距離の障害物を認知するまでの期間を短くすることができ、車両と障害物との衝突可能性を低くすることができる。
【0058】
(第1の実施形態の変形例)
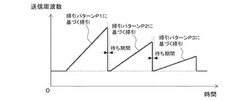
図5は、上記第1の実施形態の一変形例に係る距離測定装置1における送信周波数の時間的変化を示す。周波数制御回路11は、帯域選択回路12により選択される掃引パターンを、各掃引パターン毎に、複数回、例えば3回、繰り返す。周波数制御回路11は、それらの各回の間にも、また、各掃引パターンによる掃引の間にも、上記待ち期間を設け、それら待ち期間中に上記通知信号を受信すると、次回以降の掃引、又は、次の順以降の掃引パターンによる掃引を中止する。
【0059】
上記変形例においては、各掃引パターン毎に、その掃引パターンによる送信周波数の掃引が繰り返されるので、測定漏れが生じ難くなり、従って、距離測定の信頼性向上を図ることができる。また、本変形例においても、上記第1の実施形態の距離測定装置による各種効果と同等の効果が得られる。なお、本変形例も、車両に適用可能である。
【0060】
(第2の実施形態)
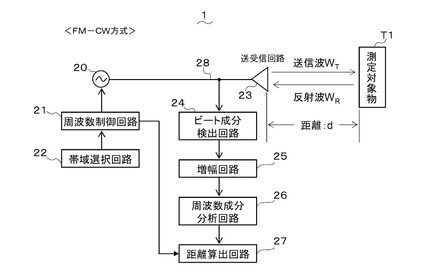
図6は、第2の実施形態に係る距離測定装置の構成を示す。この距離測定装置1は、FM−CW方式により距離dを測定する距離測定装置である。
【0061】
距離測定装置1は、信号源20と、周波数制御回路21と、帯域選択回路22と、送受信回路23と、ビート信号成分検出回路(以下、ビート検出回路という)24と、増幅回路25と、周波数成分分析回路(以下、分析回路という)26と、距離算出回路27と、信号伝送線路28とを備える。
【0062】
信号源20、帯域選択回路22(周波数掃引部を構成)、送受信回路23(送信部、受信部)、及び信号伝送線路28は、それぞれ、上記第1の実施形態の信号源10、帯域選択回路12、送受信回路13、及び信号伝送線路19と同等の構成である。帯域選択回路22は、帯域選択回路12と同等の3種類の掃引パターンを予め記憶している。掃引パターンの種類数は上記に限定されない。
【0063】
周波数制御回路21(周波数掃引部を構成)は、信号源20への入力電圧を掃引することにより信号源20の発振周波数を掃引し、これにより、送信周波数を掃引する。周波数制御回路21は、予め設定された上記発振周波数の掃引時の下限値に、帯域選択回路12により選択された掃引パターンの周波数掃引幅を加えることにより、発振周波数の上限値を算出する。そして、周波数制御回路21は、上記発振周波数を上記の下限値から上記の上限値までの範囲で、上記発振周波数を連続して上昇掃引する。この掃引処理により、送信周波数は、上記図10に示されるような鋸波状に変調される。この変調により、送信波WTと反射波WRとの合成波形は上記図11に示す波形となり、合成波はビート信号を含む。上記掃引処理において、発振周波数は下降掃引されてもよい。
【0064】
ビート検出回路24(検出部)は、信号伝送線路28中の特定地点における上記合成波の振幅を検出し、すなわち、合成波を包絡線検波し、その合成波からビート信号を抜き出す包絡線検波回路等により構成される。
【0065】
増幅回路25(増幅部)と分析回路26(周波数成分分析部)とは、それぞれ、上記の増幅回路16と分析回路17とによる定在波パワー検出信号への処理を上記ビート信号に施す。
【0066】
距離算出回路27(距離算出部)は、分析回路26により計測された検出信号の周波数を基に、上記式(5)を用いて距離dを算出する。この算出処理においては、式(5)のfb、ΔF、τに、それぞれ、上記ビート信号の周波数(ビート周波数)、帯域選択回路12により選択される掃引パターンの周波数掃引幅、上記掃引パターンの掃引期間が代入され、距離dが算出される。距離算出回路27は、上記第1の実施形態の距離算出回路18と同様に通知信号を送出する機能を有し、周波数制御回路21は、上記第1の実施形態の周波数制御回路11と同じように上記通知信号の受信に基づいて掃引を中止する機能(上記図4参照)を有する。
【0067】
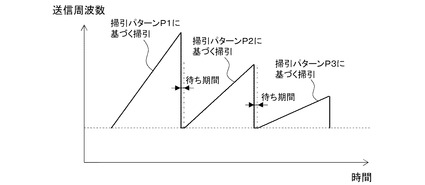
図7は、上記3種類の掃引パターンに基づいて周波数制御回路21により掃引された送信周波数の時間的変化を示す。上記図2に図示の掃引処理においては、送信周波数が階段状に変調されたのに対して、図7に示す掃引処理においては、送信周波数が周波数制御回路21により連続して掃引され、直線状に変調される。
【0068】
本実施形態の距離測定装置1においても、上記第1の実施形態と同等の各種効果を奏することができる。なお、本実施形態も、第1の実施形態と同様に、車両に適用することができる。
【0069】
なお、本発明は、上記第1の実施形態、その変形例、及び第2の実施形態の構成に限定されるものでなく、使用目的に応じ、様々な変形が可能である。例えば、周波数制御回路11又は周波数制御回路21による発振周波数の掃引処理において、任意の発振周波数を周波数掃引幅の中心又は上限とし、この中心又は上限の発振周波数を基準に発振周波数を掃引してもよい。また、帯域選択回路12又は帯域選択回路22は、掃引パターンP1、P2、P3のうち、掃引速度が速い掃引パターンから順に、その掃引パターンに従って掃引しても構わない。また、送受信回路13はホーンアンテナであってもよいし、信号伝送線路19の代わりとして導波管が用いられ、パワー検出回路14が方向性結合器により構成されていても構わない。また、上記変形例と上記第2の実施形態とを組み合わせてもよい。
【符号の説明】
【0070】
1 距離測定装置
10、20 信号源
11、21 周波数制御回路(周波数掃引部を構成)
12、22 帯域選択回路(周波数掃引部を構成)
13、23 送受信回路(送信部、受信部)
14 パワー検出回路(検出部)
17、26 周波数成分分析回路(周波数成分分析部)
18、27 距離算出回路(距離算出部)
24 ビート成分検出回路(検出部)
P1、P2、P3 掃引パターン
【技術分野】
【0001】
本発明は、測定対象物までの距離をレーダ波又は超音波を用いて測定する距離測定装置に関する。
【背景技術】
【0002】
従来から、レーダ波又は超音波を利用して測定対象物までの距離を測定する技法として、定在波方式と、FM−CW方式とが知られており、それぞれの方式の距離測定装置が知られている。
【0003】
いずれの方式の距離測定装置においても、信号源の発振周波数が掃引され、その掃引された発振周波数と同じ周波数の送信波が測定対象物に放射され、送信波と、その送信波が測定対象物で反射して生じた反射波との合成波が検出される。そして、その検出信号が増幅され、サンプリングされ、周波数分析され、その分析結果に基づいて測定対象物までの距離が算出される。
【0004】
上記2方式における相違点は、送信波の周波数(以下、送信周波数という)の掃引の仕方である。従って、上記2方式においては、送信波と反射波との合成波形が異なり、合成波の検出部分、及び、検出信号に対する分析内容等も相違する。
【0005】
以下、上記2方式の距離測定技法について詳述する。図8は、従来及び本発明の定在波方式による距離測定原理を示す。図8における上側の図において、第1象限の横軸は時間tを示し、縦軸は送信周波数fを示し、第2象限の横軸は任意の検出地点において検出される定在波のパワーpを表す。上記検出地点は、送信波の放射地点と測定対象物とを通る直線上の任意の地点である。
【0006】
この方式においては、送信周波数fの一定期間の保持と一定幅の上昇とが繰り返されるように送信周波数fが掃引される。この掃引により、送信周波数fが階段状に変調される(上記第1象限参照)。各周波数fにおける一定の保持期間は、レーダ波又は超音波が測定対象物までの間を伝搬して往復するのに必要な時間よりも長く設定されており、その保持期間毎に、送信波と、上記往復により位相が遅延した反射波とが干渉し、合成波として定在波が生成される。
【0007】
上記検出地点における定在波パワーpは、送信周波数の掃引に応じて周期的に増減する(上記第2象限参照)。この原理について図9を参照して説明する。ここでは、送信周波数が上昇するとする。この上昇により、検出地点D1と測定対象物T1との間の送信波WT及び反射波WRの波数は増え、そのため、定在波WSの波数が増加し、検出地点D1における定在波WSの位相が変位する。これにより、検出地点D1における定在波WSの振幅がA1からA2に変わり、振幅に比例する定在波パワーpが変化する。従って、送信周波数の掃引により、検出地点D1における定在波WSの位相が2π以上掃引されると、定在波パワーpは周期性を持つようになる。
【0008】
ここに、送信周波数の掃引による定在波パワーpの変動周期と、測定対象物T1までの距離と、光速とを、それぞれ、Δf、d、cとすると、下記の式(1)の関係式が成立する。
【0009】
【数1】
【0010】
従って、変動周期Δfを求めることにより、距離dを算出することができる。ところで、定在波パワーpを、任意の期間、検出すると、定在波パワーpの時系列信号(以下、定在波パワー信号という)が得られ、定在波パワーpを時間関数として表すことができる。しかしながら、上記式(1)は時間を変数に含まないので、定在波パワー信号と、式(1)とだけから、距離dを算出することはできない。
【0011】
そこで、上記式(1)を時間領域の数式に変換することが考えられる。ここに、変動周期Δfに対応する期間と、送信周波数の掃引幅と、掃引期間とを、それぞれ、Tp、ΔF、τとすると、下記式(2)が求まる(図8参照)。
【0012】
【数2】
【0013】
上記式(2)に上記式(1)を代入し、また、定在波パワー信号の周波数をfp(=1/Tp)とすると、周波数fpについての下記式(3)が導き出される。
【0014】
【数3】
【0015】
従って、定在波パワー信号の周波数fpを計測し、その計測値と、予め設定された掃引幅ΔF及び掃引期間τと、光速cとを、上記式(3)に代入することにより、距離dを求めることができる。
【0016】
次に、図10を参照して、従来及び本発明のFM−CW方式による距離測定原理を説明する。この方式における送信波WTは、その周波数を掃引期間τに周波数掃引幅ΔFだけ連続掃引することにより、鋸波状にFM変調された連続波(CW波)である。反射波WRは、送信波WTに対して時間的に遅れるが、その遅延時間Δtは、レーダ波又は超音波が測定対象物までの距離dの空間を往復するのに必要な時間である。この遅延により送信波WTと反射波WRとの周波数には差が生じる。ここに、この周波数差、すなわち、ビート周波数をfbとすると、下記式(4)の関係式が成り立つ。
【0017】
【数4】
【0018】
遅延時間Δtは、Δt=2d/c(c:光速)と表され、この式を上記式(4)に代入すると、ビート周波数fbと距離dとの関係を示す下記式(5)が求められる。
【0019】
【数5】
【0020】
従って、ビート周波数fbを測定し、上記式(5)に代入することにより、距離dを割り出すことができる。ビート周波数fbは、送信波WTと反射波WRとの合成波から計測することができる。
【0021】
図11は、上記合成波WCの波形を示す。送信周波数が掃引されると、合成波WCにはうなりが生じ、合成波WCの振幅は、ビート周波数fbでもって増大、減少を繰り返す。そのため、合成波WCを例えば包絡線検波することにより、合成波WCから上記うなりの信号、すなわち、ビート信号を抽出して、その周波数を計測することにより、ビート周波数fbを得ることができ、上記式(5)から距離dを算出することができる。
【0022】
ところで、上記式(3)及び式(5)に示されるように、定在波パワー信号の周波数fpとビート信号のビート周波数fbとは距離dに応じて変化し、例えば、測定対象物が近いと低くなり、遠いと高くなる。そして、定在波パワー信号/ビート信号は、一般に、周波数成分分析回路(以下、分析回路という)等により、有限のサンプリング処理期間中にサンプリングされ、離散化され、さらに、それらの離散値が高速フーリエ変換(FFT)され、これにより、定在波パワー信号の周波数fp/ビート信号のビート周波数fbが計測される。
【0023】
従って、従来の上記2方式のいずれの距離測定装置においても、測定対象物が装置に近過ぎると、図12(a)に示されるように、定在波パワー信号の周波数fp/ビート信号のビート周波数fbが低くなり過ぎて、上記サンプリング処理期間に、定在波パワー信号/ビート信号を1波長以上、サンプリングすることができないことがある。そのため、周波数fp/ビート周波数fbを正確に求められないことがある。
【0024】
一方、測定対象物が装置から遠過ぎると、図12(b)に示されるように、周波数fp/ビート周波数fbが高くなり過ぎて、サンプリング周波数の1/2以上になることがある。そのため、ナイキストのサンプリング定理が満たされず、エイリアシングが発生し、周波数fp/ビート周波数fbの高精度な算出が困難なことがある。
【0025】
すなわち、図13に示されるように、装置から測定対象物までの距離が、上記分析回路等により分析可能な周波数範囲に対応した距離範囲よりも短いか、又は長いと、上記の距離に応じた周波数の定在波パワー信号/ビート信号が得られたとしても、その周波数を計測することができず、従って、距離測定が困難になる。そのため、測定可能な距離範囲を近距離側にも遠距離側にも拡げたいという要望があった。
【0026】
そこで、上記要望に応えるため、上記分析回路において、上記サンプリング処理期間を長くし、かつ、上記サンプリング周波数を高くすることが考えられる。しかしながら、サンプリング処理期間が長くなると、測定に要する期間(以下、測定期間という)が長くなってしまう。また、サンプリング周波数が高周波になると、計算量が膨大になって計算時間が長くなり、従って、測定期間が長くなるので、それを防ぐには、高速度の演算が可能な高性能な分析回路が必要になり、製造コストが上がってしまう。
【0027】
ところで、送信信号の周波数をシフトし、目標対象で反射された反射波を基に目標対象までの距離を測定し、目標対象が近ければ送信信号の周波数シフトを大きくし、遠ければ周波数シフトを小さくして再測定する距離測定システムが知られている(例えば、特許文献1参照)。この距離測定システムにおいては、周波数シフトを大きく、又は小さくすることにより、測定対象が近距離又は遠距離の範囲に特化され、各距離の範囲の測定精度が向上する。
【0028】
また、測定対象物までの距離をFM−CW方式により測定し、その測定された距離が基準距離未満であれば、定在波方式により距離を測定し直すレーダ装置が知られている(例えば、特許文献2参照)。また、3種類以上の周波数変調がなされた送信信号を分割して放射し、目標で反射された受信波と上記送信信号とを混合してビート信号を生成し、このビート信号を基に目標までの距離を算出するレーダ装置が知られている(例えば、特許文献3参照)。しかしながら、上記の距離測定システム及びレーダ装置においては、上記問題を解決することは困難である。
【先行技術文献】
【特許文献】
【0029】
【特許文献1】特表2003−505699号公報
【特許文献2】特開2009−058335号公報
【特許文献3】特開2009−288223号公報
【発明の概要】
【発明が解決しようとする課題】
【0030】
本発明は、上記の従来の問題を解決するためになされたものであり、測定期間の延長及び製造コストの増加を抑えながら、測定可能な距離範囲を近距離側にも遠距離側にも拡げることができる距離測定装置を提供することを目的とする。
【課題を解決するための手段】
【0031】
上記目的を達成するために本発明の距離測定装置は、信号源の発振周波数を掃引する周波数掃引部と、前記周波数掃引部により掃引される発振周波数に対応した周波数の送信波を放射する送信部と、前記送信波が測定対象物により反射されて生じた反射波を受信する受信部と、前記送信波と前記反射波との合成波のパワー又は振幅を検出する検出部と、前記検出部による検出信号を特定の処理期間、サンプリングして、その周波数成分を分析する周波数成分分析部と、前記周波数成分分析部による分析結果に基づいて測定対象物までの距離を算出する距離算出部と、を備えた距離測定装置において、前記周波数掃引部は、前記発振周波数の掃引幅が互いに異なる複数の掃引パターンを予め記憶しており、それらの掃引パターンのうち、掃引幅が広い掃引パターンから順に、その掃引パターンに従って掃引することを特徴とすることを特徴とする。
【0032】
この距離測定装置においては、前記周波数掃引部は、前記掃引パターンに従った掃引を開始した後、前記距離算出部が距離を最初に算出すると、次の順以降の掃引パターンによる掃引を中止することが望ましい。
【発明の効果】
【0033】
本発明によれば、記憶された掃引パターンのいずれかに従った掃引により、測定対象物までの距離に比例する検出信号の周波数を、測定対象物までの距離に係わらず、周波数成分分析部により分析可能な周波数範囲内に収めることができる。従って、測定可能な距離範囲を近距離側にも遠距離側にも拡げることができる。しかも、近距離側の測定範囲を拡げるために低周波の検出信号に対応して周波数成分分析部の処理期間を延ばさなくて済むので、測定期間の延長を防ぐことができる。また、遠距離側の測定範囲を拡げるために高周波の検出信号に対応して周波数成分分析部を高速度の演算が可能な高性能なものにしなくて済むので、製造コストを抑えることができる。さらに、近距離から優先的に測定することができる。
【図面の簡単な説明】
【0034】
【図1】本発明の第1の実施形態に係る距離測定装置の電気的ブロック図。
【図2】上記装置における送信周波数の掃引パターンを示す図。
【図3】上記装置における定在波パワーの検出信号の周波数と測定対象物までの距離との関係を示す図。
【図4】上記装置における送信周波数の掃引処理のフローチャート。
【図5】上記実施形態の一変形例に係る距離測定装置の送信周波数の掃引パターンを示す図。
【図6】本発明の第2の実施形態に係る距離測定装置の電気的ブロック図。
【図7】上記装置における送信周波数の掃引パターンを示す図。
【図8】(a)(b)は従来及び本発明の定在波方式による距離測定原理を説明するための図。
【図9】上記方式において送信周波数が上昇したときの任意の地点における定在波パワー変動を示す図。
【図10】従来及び本発明のFM−CW方式による距離測定原理を説明するための図
【図11】上記方式における送信波と反射波との合成波形図。
【図12】(a)(b)は従来の距離測定装置において測定対象物が装置に近過ぎるときと装置から遠過ぎるときの定在波パワー信号/ビート信号波形を示す図。
【図13】上記定在波パワー信号/ビート信号の周波数と測定対象物までの距離との関係を示す図。
【発明を実施するための形態】
【0035】
以下、本発明の各種実施形態に係る距離測定装置について図面を参照して説明する。
(第1の実施形態)
図1は、第1の実施形態に係る距離測定装置の構成を示す。この距離測定装置1は、装置から測定対象物T1までの距離dを定在波方式により測定する距離測定装置である。
【0036】
距離測定装置1は、信号源10と、周波数制御回路11と、帯域選択回路12と、送受信回路13とを備える。周波数制御回路11は、信号源10の発振周波数を掃引する。帯域選択回路12は、上記発振周波数の掃引幅が互いに異なる複数の掃引パターンのいずれかを選択する。送受信回路13は、上記発振周波数に対応した周波数、具体的には、発振周波数と同じ周波数を有するレーダ波又は超音波である送信波WTを放射する。また、送受信回路13は、送信波WTが測定対象物T1により反射されて生じた反射波WRを受信する。
【0037】
また、距離測定装置1は、パワー検出回路14と、時間軸変換回路15と、増幅回路16と、周波数成分分析回路(以下、分析回路という)17と、距離算出回路18とをさらに備える。パワー検出回路14は、送信波WTと反射波WRとの合成波である定在波のパワーを検出する。時間軸変換回路15は、パワー検出回路14による検出信号の時間軸を圧縮又は伸長する。増幅回路16は、時間軸変換回路15により時間軸が圧縮又は伸長された検出信号を増幅し、分析回路17は、増幅後の検出信号の周波数成分を分析する。距離算出回路18は、分析回路17による分析結果から距離dを算出する。
【0038】
信号源10は、例えば電圧制御発振回路等により構成され、周波数制御回路11から信号源10に入力される電圧に対応した周波数で発振し、その発振周波数を有した信号を送受信回路13に出力する。
【0039】
周波数制御回路11(周波数掃引部を構成)は、信号源10への入力電圧を掃引することにより信号源10の発振周波数を掃引し、これにより、送信波WTの周波数(以下、送信周波数という)を掃引する。周波数制御回路11は、予め設定された上記発振周波数の掃引時の下限値に、帯域選択回路12により選択された掃引パターンの周波数掃引幅を加えることにより、発振周波数の上限値を算出する。そして、周波数制御回路11は、上記発振周波数を上記の下限値から上記の上限値までの範囲で、一定の周波数間隔で上昇掃引し、各周波数毎に一定の保持期間だけ、その周波数の値を維持する。この保持期間は、送受信回路13と測定対象物T1との間のレーダ波又は超音波による往復時間よりも長く設定されており、その保持期間毎に、周波数の異なる定在波が発生する。上記掃引処理において、発振周波数は下降掃引されてもよい。ここに、上記周波数掃引幅の掃引に要する期間を掃引期間という。
【0040】
送信周波数は、周波数制御回路11による掃引処理により、上記図8に示されるような階段状に変調される。上記周波数間隔及び保持期間は、それぞれ、1掃引パターンによる掃引中は同じであるが、各掃引パターン毎に、異なっていても、又は同じであってもよい。上記周波数間隔及び保持期間は、図8に図示された例に限定されない。
【0041】
帯域選択回路12(周波数掃引部を構成)は、メモリ及びマイクロプロセッサにより構成され、このメモリには3種類の上記掃引パターンが予め格納されている。各掃引パターンには、周波数掃引幅と、掃引期間とが設定されている。周波数掃引幅は、各掃引パターン毎に互いに異なり、測定したい距離に応じて設定され、詳しくは、その距離が短いほど広く設定されている。各掃引パターンの掃引期間は互いに同じである。上記マイクロプロセッサは、3種類の掃引パターンのうち、周波数掃引幅が広い掃引パターンから順に選択する。上記掃引パターンの種類数は上記に限定されず、また、各掃引パターンの掃引期間は互いに異なっていてもよい。
【0042】
送受信回路13(送信部、受信部)は、パッチアンテナ等により構成される。送受信回路13は、周波数制御回路11により周波数掃引された発振周波数と同じ周波数の送信波WTを測定対象物T1に放射する。また、送受信回路13は、送信波WTが測定対象物T1により反射されて生じた反射波WRを受信する。信号源10と送受信回路13とは、送信波WT及び反射波WRを伝搬するマクロストリップ線路等の信号伝送線路19により電気的に結ばれている。なお、反射波WRは微弱であるので、反射波WRが信号源10の信号発振に与える影響等は無視する。
【0043】
パワー検出回路14(検出部)は、信号伝送線路19中の特定地点における定在波のパワーを検出するダイオード等により構成される。パワー検出回路14による検出信号は、上記定在波パワー信号に相当し、送信周波数が掃引されると、検出値が周期的に変動する。
【0044】
ところで、周波数掃引幅が同じであっても、掃引期間が変われば、すなわち、掃引速度が異なれば、定在波パワー信号の周波数は変わる(図8参照)。従って、掃引期間を考慮した補正をすることなく、定在波パワー信号の周波数から単純に距離dを算出すると、距離dは不正確な値になる。従って、距離dの正確な値を得るためには、定在波パワー信号の時間軸を、掃引期間に応じた圧縮/伸長率で圧縮又は伸長し、掃引期間が基準掃引期間であるときの時間軸に変換する補正が必要になる。
【0045】
そこで、時間軸変換回路15は、帯域選択回路12により選択された掃引パターンの掃引期間の情報を周波数制御回路11から取得し、その取得した掃引期間に応じた圧縮/伸長率で、上記検出信号を時間軸方向に圧縮/伸長し、上記補正を行う。この補正においては、基準掃引期間に対する上記掃引期間の比を求め、その比の逆数を上記圧縮/伸長率とする。
【0046】
増幅回路16は、時間軸変換回路15により時間軸変換された検出信号の波高値が、分析回路17による分解能に応じた値になるよう増幅する。
【0047】
分析回路17(周波数成分分析部)は、増幅回路16により増幅された検出信号をサンプリングし、符号化し、高速フーリエ変換(FFT)することにより、検出信号の周波数を計測する。
【0048】
距離算出回路18(距離算出部)は、分析回路17により計測された検出信号の周波数を基に、上記式(3)を用いて距離dを算出する。この算出処理においては、上記式(3)のfp、ΔF、τに、それぞれ、上記検出信号の周波数、帯域選択回路12により選択された掃引パターンの周波数掃引幅、上記基準掃引期間が代入され、距離dが算出される。距離算出回路18は、上記3種類の掃引パターンによる掃引において、距離dが最初に算出されたとき、その算出を通知する通知信号を周波数制御回路11に送出する。周波数制御回路11は、上記通知信号を、掃引パターンによる掃引後の特定の待ち期間に受信したとき、次の順以降の掃引パターンによる掃引を中止する。
【0049】
図2は、上記3種類の掃引パターンに基づいて周波数制御回路11により掃引された送信周波数の時間的変化を示す。3種類の掃引パターンP1、P2、P3は、掃引期間が互いに略同じであり、かつ、周波数掃引幅が互いに異なり、従って、周波数掃引幅を掃引期間で除して得られる周波数掃引速度が相違する。送信周波数の下限値は一定なので、各掃引パターンP1、P2、P3による掃引において、掃引される送信周波数の上限値は互いに異なる。各掃引パターンP1、P2、P3は、その周波数掃引幅が、掃引パターンP1で最も広く、次に、掃引パターンP2、P3の順に広く、この順で帯域選択回路12により選択される。掃引パターンP1による掃引後、及び掃引パターンP2による掃引後は、それぞれ、上記待ち期間が経過してから、次の順の掃引パターンに基づく掃引が開始される。
【0050】
ところで、上記式(3)に示されるように、掃引期間τが一定で、距離dが短い又は長いときには、周波数掃引幅ΔFを広く又は狭くすることにより、周波数fp(本実施形態ではパワー検出回路14による検出信号の周波数)を特定の周波数範囲内に収めることができる。
【0051】
そこで、本実施形態においては、測定したい距離範囲を、近距離、中距離、遠距離(以下、近・中・遠距離という)に分割し、掃引パターンP1、P2、P3の周波数掃引幅(ΔF)を、それぞれ、上記近・中・遠距離に対応した掃引幅に設定する。
【0052】
ここで、この対応関係について説明する。図3に示されるように、測定対象物T1が装置から近距離の位置に在るときには、掃引パターンP1の掃引により生じる上記検出信号の周波数が、分析回路17により分析可能な周波数範囲内に収まるように、掃引パターンP1の周波数掃引幅が設定されている。また、測定対象物T1が中距離の位置に在るときには、掃引パターンP2の掃引により生じる上記検出信号の周波数が上記周波数範囲内に収まるように、掃引パターンP2の周波数掃引幅が設定されている。また、測定対象物T1が遠距離の位置に在るときには、掃引パターンP3の掃引により生じる上記検出信号の周波数が上記周波数範囲内に収まるように、掃引パターンP3の周波数掃引幅が設定されている。
【0053】
次に、周波数制御回路11における送信周波数の掃引処理について、図2に加えて、図4を参照して説明する。図4は、上記掃引処理の手順を示す。周波数制御回路11は、変数iを1とし(S1)、掃引パターンPiに従った掃引を開始し(S2)、その後の上記待ち期間内に、距離算出回路18からの上記通知信号を受信すると(S3でYes)、次の順以降の掃引パターンによる掃引を中止する(S4)。上記掃引パターンPiによる掃引後、上記待ち期間内に通知信号が受信されず(S3でNo)、かつ、変数i=3でなければ(S5でNo)、周波数制御回路11は、変数iをインクリメントし(S6)、処理をS2に戻す。S5の処理において、変数i=3であれば(S5でYes)、掃引を終了する。
【0054】
本実施形態の距離測定装置1においては、掃引パターンP1、P2、P3のいずれかに従った掃引により、距離dに比例する上記検出信号の周波数を、距離dが近距離、中距離、又は遠距離のいずれであったとしても、上記分析可能な周波数範囲内に収めることができる。従って、測定可能な距離範囲を近距離側にも遠距離側にも拡げることができる。しかも、近距離側の測定範囲を拡げるために低周波の上記検出信号に対応して分析回路17の処理期間を延ばさなくて済むので、測定期間の延長を防ぐことができる。また、遠距離側の測定範囲を拡げるために高周波の上記検出信号に対応して分析回路17を高速度の演算が可能な高性能なものにしなくて済み、また、増幅回路16は高周波対応のものにしなくて済むので、製造コストを抑えることができる。
【0055】
また、近距離から優先的に測定することができる。また、測定対象の距離範囲が、近距離、中距離、遠距離に分割され、掃引パターンP1、P2、P3はそれらの距離にそれぞれ対応しているので、各距離の測定精度の向上を図ることができる。
【0056】
また、現在の(順の)掃引パターンに従った送信周波数掃引により、測定対象物までの距離dが(最初に)算出されたときには、次の順以降の掃引パターンに基づく掃引は中止され、測定対象物までの距離が、この算出された距離dに確定する。従って、距離測定に要する時間を短縮すると共に、距離測定に要する消費電力を削減することができる。
【0057】
本実施形態の距離測定装置1は、例えば、車両に搭載され、その車両の後部又はコーナと壁等の障害物(測定対象物)との距離を測定するバックセンサ又はコーナセンサに適用することができる。距離測定装置1においては、測定対象物までの距離が近距離から優先して測定されるので、車両の近距離に在る障害物を遠距離の障害物よりも早く検知することができる。従って、上記車両に、距離測定装置1による測定結果を音又は光でユーザに通知する通知回路を設けた場合、その通知回路により近距離の障害物の存在を素早く通知することができる。そのため、ユーザが近距離の障害物を認知するまでの期間を短くすることができ、車両と障害物との衝突可能性を低くすることができる。
【0058】
(第1の実施形態の変形例)
図5は、上記第1の実施形態の一変形例に係る距離測定装置1における送信周波数の時間的変化を示す。周波数制御回路11は、帯域選択回路12により選択される掃引パターンを、各掃引パターン毎に、複数回、例えば3回、繰り返す。周波数制御回路11は、それらの各回の間にも、また、各掃引パターンによる掃引の間にも、上記待ち期間を設け、それら待ち期間中に上記通知信号を受信すると、次回以降の掃引、又は、次の順以降の掃引パターンによる掃引を中止する。
【0059】
上記変形例においては、各掃引パターン毎に、その掃引パターンによる送信周波数の掃引が繰り返されるので、測定漏れが生じ難くなり、従って、距離測定の信頼性向上を図ることができる。また、本変形例においても、上記第1の実施形態の距離測定装置による各種効果と同等の効果が得られる。なお、本変形例も、車両に適用可能である。
【0060】
(第2の実施形態)
図6は、第2の実施形態に係る距離測定装置の構成を示す。この距離測定装置1は、FM−CW方式により距離dを測定する距離測定装置である。
【0061】
距離測定装置1は、信号源20と、周波数制御回路21と、帯域選択回路22と、送受信回路23と、ビート信号成分検出回路(以下、ビート検出回路という)24と、増幅回路25と、周波数成分分析回路(以下、分析回路という)26と、距離算出回路27と、信号伝送線路28とを備える。
【0062】
信号源20、帯域選択回路22(周波数掃引部を構成)、送受信回路23(送信部、受信部)、及び信号伝送線路28は、それぞれ、上記第1の実施形態の信号源10、帯域選択回路12、送受信回路13、及び信号伝送線路19と同等の構成である。帯域選択回路22は、帯域選択回路12と同等の3種類の掃引パターンを予め記憶している。掃引パターンの種類数は上記に限定されない。
【0063】
周波数制御回路21(周波数掃引部を構成)は、信号源20への入力電圧を掃引することにより信号源20の発振周波数を掃引し、これにより、送信周波数を掃引する。周波数制御回路21は、予め設定された上記発振周波数の掃引時の下限値に、帯域選択回路12により選択された掃引パターンの周波数掃引幅を加えることにより、発振周波数の上限値を算出する。そして、周波数制御回路21は、上記発振周波数を上記の下限値から上記の上限値までの範囲で、上記発振周波数を連続して上昇掃引する。この掃引処理により、送信周波数は、上記図10に示されるような鋸波状に変調される。この変調により、送信波WTと反射波WRとの合成波形は上記図11に示す波形となり、合成波はビート信号を含む。上記掃引処理において、発振周波数は下降掃引されてもよい。
【0064】
ビート検出回路24(検出部)は、信号伝送線路28中の特定地点における上記合成波の振幅を検出し、すなわち、合成波を包絡線検波し、その合成波からビート信号を抜き出す包絡線検波回路等により構成される。
【0065】
増幅回路25(増幅部)と分析回路26(周波数成分分析部)とは、それぞれ、上記の増幅回路16と分析回路17とによる定在波パワー検出信号への処理を上記ビート信号に施す。
【0066】
距離算出回路27(距離算出部)は、分析回路26により計測された検出信号の周波数を基に、上記式(5)を用いて距離dを算出する。この算出処理においては、式(5)のfb、ΔF、τに、それぞれ、上記ビート信号の周波数(ビート周波数)、帯域選択回路12により選択される掃引パターンの周波数掃引幅、上記掃引パターンの掃引期間が代入され、距離dが算出される。距離算出回路27は、上記第1の実施形態の距離算出回路18と同様に通知信号を送出する機能を有し、周波数制御回路21は、上記第1の実施形態の周波数制御回路11と同じように上記通知信号の受信に基づいて掃引を中止する機能(上記図4参照)を有する。
【0067】
図7は、上記3種類の掃引パターンに基づいて周波数制御回路21により掃引された送信周波数の時間的変化を示す。上記図2に図示の掃引処理においては、送信周波数が階段状に変調されたのに対して、図7に示す掃引処理においては、送信周波数が周波数制御回路21により連続して掃引され、直線状に変調される。
【0068】
本実施形態の距離測定装置1においても、上記第1の実施形態と同等の各種効果を奏することができる。なお、本実施形態も、第1の実施形態と同様に、車両に適用することができる。
【0069】
なお、本発明は、上記第1の実施形態、その変形例、及び第2の実施形態の構成に限定されるものでなく、使用目的に応じ、様々な変形が可能である。例えば、周波数制御回路11又は周波数制御回路21による発振周波数の掃引処理において、任意の発振周波数を周波数掃引幅の中心又は上限とし、この中心又は上限の発振周波数を基準に発振周波数を掃引してもよい。また、帯域選択回路12又は帯域選択回路22は、掃引パターンP1、P2、P3のうち、掃引速度が速い掃引パターンから順に、その掃引パターンに従って掃引しても構わない。また、送受信回路13はホーンアンテナであってもよいし、信号伝送線路19の代わりとして導波管が用いられ、パワー検出回路14が方向性結合器により構成されていても構わない。また、上記変形例と上記第2の実施形態とを組み合わせてもよい。
【符号の説明】
【0070】
1 距離測定装置
10、20 信号源
11、21 周波数制御回路(周波数掃引部を構成)
12、22 帯域選択回路(周波数掃引部を構成)
13、23 送受信回路(送信部、受信部)
14 パワー検出回路(検出部)
17、26 周波数成分分析回路(周波数成分分析部)
18、27 距離算出回路(距離算出部)
24 ビート成分検出回路(検出部)
P1、P2、P3 掃引パターン
【特許請求の範囲】
【請求項1】
信号源の発振周波数を掃引する周波数掃引部と、
前記周波数掃引部により掃引される発振周波数に対応した周波数の送信波を放射する送信部と、
前記送信波が測定対象物により反射されて生じた反射波を受信する受信部と、
前記送信波と前記反射波との合成波のパワー又は振幅を検出する検出部と、
前記検出部による検出信号を特定の処理期間、サンプリングして、その周波数成分を分析する周波数成分分析部と、
前記周波数成分分析部による分析結果に基づいて測定対象物までの距離を算出する距離算出部と、を備えた距離測定装置において、
前記周波数掃引部は、前記発振周波数の掃引幅が互いに異なる複数の掃引パターンを予め記憶しており、それらの掃引パターンのうち、掃引幅が広い掃引パターンから順に、その掃引パターンに従って掃引することを特徴とすることを特徴とする距離測定装置。
【請求項2】
前記周波数掃引部は、前記掃引パターンに従った掃引を開始した後、前記距離算出部が距離を最初に算出すると、次の順以降の掃引パターンによる掃引を中止することを特徴とする請求項1に記載の距離測定装置。
【請求項1】
信号源の発振周波数を掃引する周波数掃引部と、
前記周波数掃引部により掃引される発振周波数に対応した周波数の送信波を放射する送信部と、
前記送信波が測定対象物により反射されて生じた反射波を受信する受信部と、
前記送信波と前記反射波との合成波のパワー又は振幅を検出する検出部と、
前記検出部による検出信号を特定の処理期間、サンプリングして、その周波数成分を分析する周波数成分分析部と、
前記周波数成分分析部による分析結果に基づいて測定対象物までの距離を算出する距離算出部と、を備えた距離測定装置において、
前記周波数掃引部は、前記発振周波数の掃引幅が互いに異なる複数の掃引パターンを予め記憶しており、それらの掃引パターンのうち、掃引幅が広い掃引パターンから順に、その掃引パターンに従って掃引することを特徴とすることを特徴とする距離測定装置。
【請求項2】
前記周波数掃引部は、前記掃引パターンに従った掃引を開始した後、前記距離算出部が距離を最初に算出すると、次の順以降の掃引パターンによる掃引を中止することを特徴とする請求項1に記載の距離測定装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−232053(P2011−232053A)
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願番号】特願2010−100214(P2010−100214)
【出願日】平成22年4月23日(2010.4.23)
【出願人】(000005832)パナソニック電工株式会社 (17,916)
【Fターム(参考)】
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願日】平成22年4月23日(2010.4.23)
【出願人】(000005832)パナソニック電工株式会社 (17,916)
【Fターム(参考)】
[ Back to top ]