
距離測定装置
【課題】距離測定装置において、比較的小型の構成で受光効率を向上して比較的広い距離検出範囲で距離を測定可能とすることを目的とする。
【解決手段】2次元スキャナおよび投光角拡大レンズを含み投光ビームを前方に投光する投光系と、投光系のビーム走査角度と同等以上の受光視野角を有すると共に受光に関する第1の光路が投光角拡大レンズの投光に関する第2の光路と独立しており投光角拡大レンズより前方、且つ、投光ビームの投光領域より後方に配置された受光レンズを含む受光系とを備えるように構成する。
【解決手段】2次元スキャナおよび投光角拡大レンズを含み投光ビームを前方に投光する投光系と、投光系のビーム走査角度と同等以上の受光視野角を有すると共に受光に関する第1の光路が投光角拡大レンズの投光に関する第2の光路と独立しており投光角拡大レンズより前方、且つ、投光ビームの投光領域より後方に配置された受光レンズを含む受光系とを備えるように構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、距離測定装置に関する。
【背景技術】
【0002】
近年、レーザレンジファインダ(LRF:Laser Range Finder)などの距離測定装置は、対象物までの距離の計測に限らず、例えば自動車などにおける障害物の検知、鉄道のホームにおける車両と開閉扉間の人検知などの周辺監視の目的にも利用されている。
【0003】
また、自動車などの車両の運転者の視認性向上のため、車載カメラシステムも提案されている。車載カメラシステムのカメラの撮像範囲は、超広角レンズの効果により例えば水平180度、垂直140度程度である。このようなカメラで取得した周囲画像データに、距離測定装置で測定した距離情報を加えることで、例えば周囲画像データの歪みを補正するなどして周辺監視の精度を向上することができる。例えば、車両の後退時に周囲の人や物を確実に検出して、車両を安全に後退させることが可能となる。しかし、撮像範囲内の各部位までの距離情報を得ようとした場合、現在市販されている距離測定装置の監視対象領域が比較的狭いことから、距離検出範囲がカメラの画角と比べて非常に狭い。このため、カメラの画角にも対応できるような広検出角度を有する距離測定装置が望まれている。
【0004】
距離測定装置の検出角度を向上させるため、走査ミラーと走査拡大レンズの組み合わせを用いて走査角度を大きくする構成が提案されている(例えば、特許文献1)。しかし、この提案されている構成では、投光と受光を同じレンズ系を介して(即ち、同軸で)行うため、ビームスプリッタを利用する必要があり、光の利用効率が低い。また、投光系は可能な限り平行光を出射するように設計されるが、受光系は対象物から戻ってくる微弱光をできる限り取り込むように設計されるので、両者の設計方針は異なる。このため、投光角拡大レンズと受光レンズは、設計方針を考慮すると別々のレンズ系で形成される方が好ましい。一方、受光効率を向上するには受光レンズのレンズ径を大きくすれば良いが、距離測定装置全体の装置サイズが大きくなってしまうため、装置サイズを考慮すると受光レンズのレンズ径の増大は好ましくない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−58341号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来の距離測定装置では、比較的小型の構成で受光効率を向上して比較的広い距離検出範囲で距離を測定することは難しい。
【0007】
そこで、本発明は、比較的小型の構成で受光効率を向上して比較的広い距離検出範囲で距離を測定可能な距離測定装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一観点によれば、2次元スキャナおよび投光角拡大レンズを含み、投光ビームを前方に投光する投光系と、前記投光系のビーム走査角度と同等以上の受光視野角を有すると共に、受光に関する第1の光路が前記投光角拡大レンズの投光に関する第2の光路と独立しており、前記投光角拡大レンズより前方、且つ、前記投光ビームの投光領域より後方に配置された受光レンズを含む受光系とを備えたことを特徴とする距離測定装置が提供される。
【発明の効果】
【0009】
開示の距離測定装置によれば、比較的小型の構成で受光効率を向上して比較的広い距離検出範囲で距離を測定可能することが可能となる。
【図面の簡単な説明】
【0010】
【図1】第1実施例における光学系を示す斜視図である。
【図2】第1実施例における光学系を示す側面図である。
【図3】第1実施例における制御系および光学系を示す図である。
【図4】第1実施例における筐体を示す斜視図である。
【図5】受光光量増加量と距離L1との関係を示す図である。
【図6】2次元スキャナの例を説明する図である。
【図7】第2実施例の動作を説明する図である。
【図8】第2実施例の制御系の構成の一例を示すブロック図である。
【図9】第2実施例で用いるテーブルの一例を説明する図である。
【図10】第3実施例の動作を説明する図である。
【図11】第3実施例の制御系の構成の一例を示すブロック図である。
【図12】第3実施例で用いるテーブルの一例を説明する図である。
【図13】第4実施例の動作を説明する図である。
【発明を実施するための形態】
【0011】
開示の距離測定装置は、2次元スキャナおよび投光角拡大レンズを含む投光系と、投光系のビーム走査角度と同等以上の受光視野角を有すると共に、受光に関する第1の光路が投光角拡大レンズの投光に関する第2の光路と独立しており、投光角拡大レンズより前方、且つ、投光ビームの投光領域より後方に配置された受光レンズを含む受光系とを備える。
【0012】
以下に、開示の距離測定装置の各実施例を図面と共に説明する。
【実施例】
【0013】
(第1実施例)
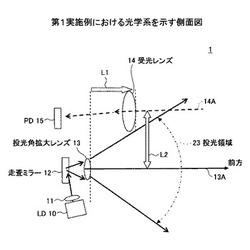
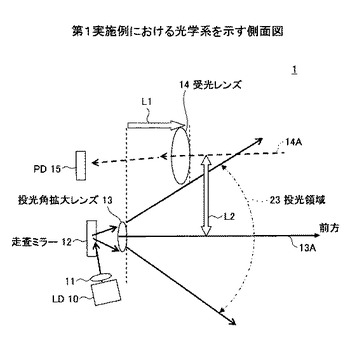
図1は、第1実施例における光学系を示す斜視図であり、図2は、第1実施例における光学系を示す側面図である。図1および図2に示すように、距離測定装置1は、光源の一例であるレーザダイオード(LD:Laser Diode)10、コリメータレンズ11、走査ミラー12、投光角拡大レンズ13、受光レンズ14、および受光部の一例であるフォトダイオード(PD:Photo Diode)15を有する。図1および図2では、説明の便宜上、LD10および走査ミラー12の制御系の図示は省略する。LD10、コリメータレンズ11、走査ミラー12、および投光角拡大レンズ13は、投光系を形成する。投光系は、水平走査範囲21と垂直走査範囲22でLD10からのレーザビームを走査させることで、投光領域23内の測定対象物にレーザビーム(即ち、投光ビーム)を照射する。一方、受光レンズ14およびPD15は、受光系を形成する。走査ミラー12および図1および図2では図示を省略するミラー制御回路(または、駆動回路)は、2次元スキャナの一例を形成する。2次元スキャナは、例えば2軸のMEMS(Micro Electro Mechanical System)で形成可能である。図5と共に後述するように、2次元スキャナの構成は特に限定されない。
【0014】
例えば車載カメラシステム(図示せず)のカメラの場合、水平方向の検出角度は180度と比較的広くする必要があるが、垂直方向に関しては、検出範囲を広げても路面または空を検出することになるため、140度程度とある程度狭くても良い。つまり、水平方向と垂直方向で検出角度範囲が異なるものであっても、同じであるものであっても良い。距離測定装置1は、例えばこのような車載カメラシステムと組み合わせて使用することで、カメラで取得した周囲画像データに距離測定装置1で測定した距離情報を加えることで、例えば周囲画像データの歪みを補正するなどして周辺監視の精度を向上することができる。
【0015】
本実施例では、2次元スキャナと投光角拡大レンズ13を含む投光系を有する距離測定装置1において、受光系は投光ビームの走査角度と同等以上の受光視野角を有し、受光レンズ14のが投光角拡大レンズ13の光軸13Aに重ならないように配置している。受光レンズ14の検出角度が投光角拡大レンズ13の投光角度と異なるので、図2に示すように、受光レンズ14を投光角拡大レンズ13より距離L1だけ前方に配置できる。また、受光レンズ14を投光ビームの投光領域23より後方に配置して、受光効率を向上させることが可能となる。図2において、L2は、受光レンズ14の光軸14Aと投光角拡大レンズ13の光軸13Aとの間の光軸間距離を示す。尚、検出範囲を規定する方向については、わかりやすくするため垂直方向および水平方向としたが、この限りではない。
【0016】
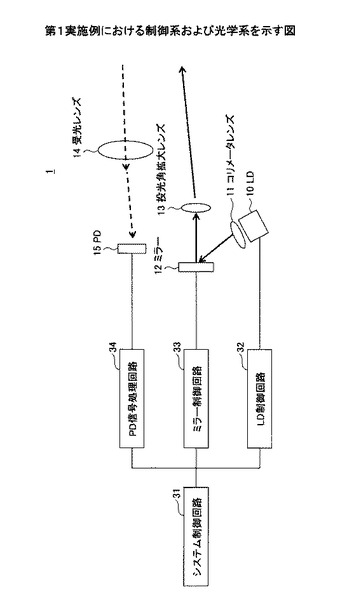
図3は、第1実施例における制御系および光学系を示す図である。図3において、制御系は、システム制御回路31、LD制御回路32、ミラー制御回路33、及びPD信号処理回路34を含む。システム制御回路31は、例えばCPU(Central Processing Unit)などのプロセッサで形成可能であり、距離測定装置1全体の制御を司る。CPUが実行するプログラムを格納する記憶部(図示せず)は、システム制御回路31内でCPUに接続されていても、システム制御回路31に外部接続されていても良い。LD制御回路32は、システム制御回路31の制御下でLD10のオン、オフ、光出射パワーなどを制御する。ミラー制御回路33は、システム制御回路31の制御下で走査ミラー12の位置を検出する回路部、走査ミラー12の位置の検出結果に基づいて走査ミラー12を駆動する制御信号を生成する回路部、および制御信号に基づいて走査ミラー12を駆動する回路部を有する。PD信号処理回路34は、システム制御回路31の制御下でPD15からの検出信号に所定の信号処理を施してシステム制御回路31などに出力する。システム制御回路31は、PD信号処理回路34からの所定の信号処理を施された信号に基づいて距離情報を生成する。上記の如き制御系自体の構成および動作は周知であるため、本明細書ではその詳細な説明は省略する。尚、システム制御回路31を形成するCPUは、LD制御回路32、ミラー制御回路33、及びPD信号処理回路34の少なくとも一部の機能を実現しても良い。
【0017】
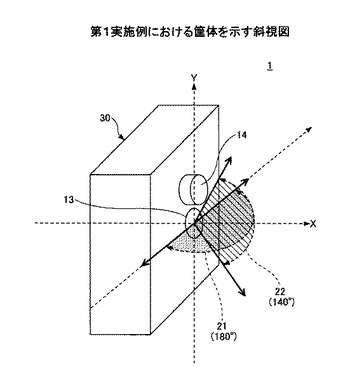
図4は、第1実施例における筐体を示す斜視図である。図4に示すように、図3に示す制御系及び光学系は、筐体30に収納されている。筐体30の形状は特に限定されないが、図4に示す例では平行六面体の箱形である。投光角拡大レンズ13と受光レンズ14の位置関係は、図2に示した通りである。図4の例では、XYZ座標系で表すと、水平方向はXZ平面と平行な方向であり、垂直方向はXY軸と平行な方向である。
【0018】
図4は、受光レンズ14が投光角拡大レンズ13よりY方向に沿って筐体30の上方、且つ、X方向に沿って筐体30の後方に配置されている場合を示すが、レンズ13,14の配置はこの例の配置に限定されるものではない。
【0019】
例えば、本実施例では投光角度が水平180度(水平走査範囲21)、垂直140度(垂直走査範囲22)、投光角拡大レンズ13のレンズ径が40mmである。また、受光レンズ14のレンズ視野が水平180度、垂直180度、受光レンズ14のレンズ径が40mmである。さらに、距離L1は20mm、光軸間距離L2は75mmである。投光角拡大レンズ13の光軸に沿って投光角拡大レンズ13から例えば50cm離れた測定対象物からの受光光量は、受光レンズ14が距離L1だけ前方にない場合(即ち、L1=0の場合)と比較すると、例えば10%向上され、距離の検出精度が向上することが確認された。
【0020】
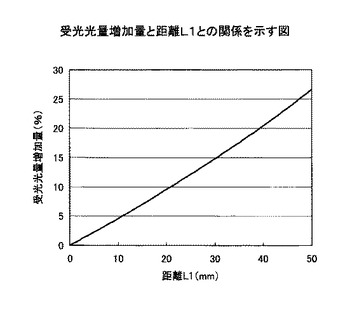
同様に、例えば光軸間距離L2が75mmであり、光学系の他の条件が上記の場合と同様であると、投光角拡大レンズ13の光軸に沿って投光角拡大レンズ13から例えば45cm離れた測定対象物からの受光光量は、受光レンズ14が距離L1だけ前方にない場合と比較すると、例えば20%向上され、距離の検出精度が向上することが確認された。図5は、この場合のPD15の受光光量増加量(%)と距離L1との関係を示す図である。図5からもわかるように、距離L1が増加するにつれて、受光光量増加量も増加する。
【0021】
水平走査範囲21が180度、垂直走査範囲22が140度、各レンズ13,14のレンズ径が10mm、距離L1が3.6mm、光軸間距離L2が20mmの場合、受光レンズ14が距離L1だけ前方にない場合と比較すると、例えば10%向上され、距離の検出精度が向上することが確認された。
【0022】
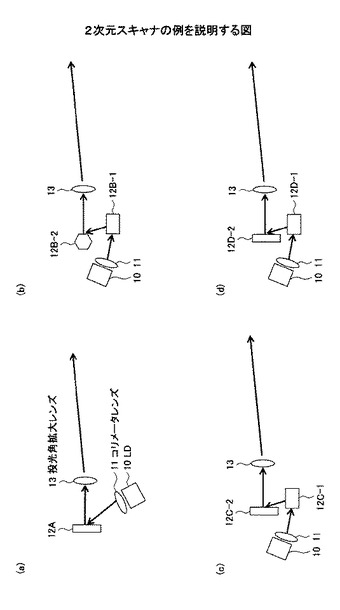
図6は、2次元スキャナの例を説明する図である。図6において、(a)は走査ミラー12が2軸のMEMS12Aで形成された例、(b)は走査ミラー12がMEMSミラーまたはガルバノミラー12B−1と1軸ポリゴンミラー12B−2で形成された例、(c)は走査ミラー12が1軸のMEMS12C−1,12C−2で形成された例、(d)は走査ミラー12が1軸のMEMSミラー12D−1と1軸のガルバノミラー12D−2で形成された例を夫々示す。図6(a)乃至(d)の各ミラー12自体の構成、駆動および制御は周知であるため、本明細書ではその詳細な説明は省略する。
【0023】
(第2実施例)
次に、受光ゲインの補正を行う第2実施例について、図7乃至図9と共に説明する。本実施例における光学系の構成は、上記第1実施例の場合と同様で良い。図7は、第2実施例の動作を説明する図であり、図8は、第2実施例の制御系の構成の一例を示すブロック図である。また、図9は、第2実施例で用いるテーブルの一例を説明する図である。
【0024】
図7において、(a)はLD10の投光レーザパワー(任意単位)と投光角度の関係を示し、(b)はPD15の受光感度(任意単位)と投光角度の関係を示す。図7(a),(b)からもわかるように、投光角度が大きくなり±90度に近づくと、投光レーザパワーおよび受光感度が低下する。そこで、本実施例の距離測定装置1では、図7(c)のようなゲイン(任意単位)と投光角度の補正データを用いて、同じ距離の測定対象物から戻ってくるレーザビームをPD15で検出してアンプ回路34−1で増幅した後の受光振幅(任意単位)が図7(d)に示すように一定となるように補正する。
【0025】
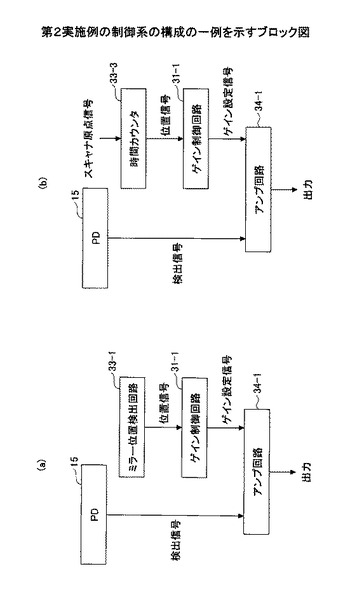
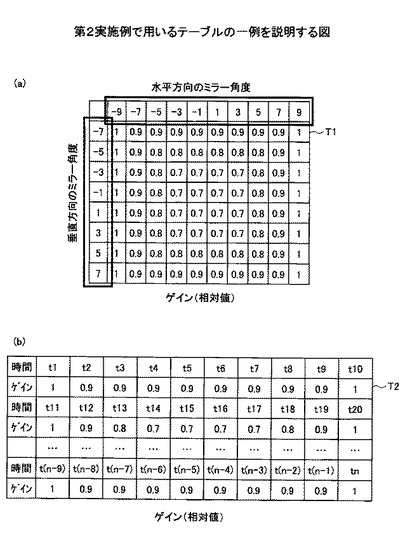
図8において、(a)は直接検出された走査ミラー12の位置に応じて受光振幅を補正する場合の制御系を示し、(b)は時間に基づいて検出された走査ミラー12の位置に応じて受光振幅を補正する場合の制御系を示す。また、図9において、(a)は図8(a)で用いるゲイン設定テーブルを示し、(b)は図8(b)で用いるゲインタイムテーブルを示す。
【0026】
図8(a)において、制御系のシステム制御回路31はゲイン(または、利得)制御回路31−1を有し、ミラー制御回路33はミラー位置検出回路33−1を有し、PD信号処理回路34はアンプ(または、増幅)回路34−1を有する。PD15は、検出信号をアンプ回路34−1に出力する。ミラー位置検出回路33−1は、周知の方法で走査ミラー12の角度位置(即ち、水平方向のミラー角度と垂直方向のミラー角度)を検出し、角度位置を示す位置信号をゲイン制御回路31−1に出力する。ゲイン制御回路31−1は、例えばシステム制御回路31内の記憶部に格納された図9(a)に示す如きゲイン設定テーブルT1を参照し、位置信号が示す水平方向のミラー角度及び垂直方向のミラー角度に基づいてゲイン(相対値)を読み出す。ゲイン制御回路31−1は、読み出したゲインを示すゲイン設定信号をアンプ回路34−1に出力し、アンプ回路34−1のゲインを制御する。
【0027】
図9(a)のゲイン設定テーブルT1は、水平走査範囲21が180度、垂直走査範囲22が140度、投光角拡大レンズ13の倍率が5倍、投光角度が5×(ミラー角度×2)である場合のゲインを示す。この場合、水平方向の投光角度Ahは−90度≦Ah≦90度、水平方向のミラー角度Mhは−9度≦Mh≦9度である。また、垂直方向の投光角度Avは−70度≦Av≦70度、垂直方向のミラー角度Mvは−7度≦Mv≦7度である。
【0028】
投光角度は走査ミラー12の角度で決まるので、ミラー位置検出回路33−1を設け、ゲイン制御回路31−1において位置信号に基づいてゲイン設定テーブルT1を参照しながらアンプ回路34−1のゲインの設定を繰り返し、PD15による受光を行う。これにより、投光領域23内で同じ測定対象物が投光角拡大レンズ13から同じ距離に位置する場合、測定対象物が互いに異なる角度位置に存在しても、アンプ回路34−1からは同じ受光振幅を得ることができ、位置測定精度を向上することができる。
【0029】
このように、投光方向(または、受光角度)による受光感度の変化(広角側ほど感度が低下しやすい)、および単位面積当たりの投光レーザパワーの変動(広角側のレーザビームの形状は広がりやすいか、あるいは、強度が低下しやすい)を補正するため、走査ミラー12の角度(即ち、投光角度)に基づいてゲイン設定テーブルT1を参照する。ゲイン設定テーブルT1から読み出したゲインに基づいてアンプ回路34−1のゲインを可変制御することで、アンプ回路34−1から出力される受光振幅を適切に補正することが可能となる。
【0030】
一方、図8(b)において、制御系のシステム制御回路31はゲイン制御回路31−1を有し、ミラー制御回路33は時間カウンタ33−3を有し、PD信号処理回路34はアンプ回路34−1を有する。PD15は、検出信号をアンプ回路34−1に出力する。時間カウンタ33−3は、周知の方法で求めた2次元スキャナのスキャン原点(または、基準点)を示すスキャナ原点信号が得られた時点からの経過時間をカウントすることで走査ミラー12の時間位置を示す位置信号を生成してゲイン制御回路31−1に出力する。ゲイン制御回路31−1は、例えばシステム制御回路31内の記憶部に格納された図9(b)に示す如きゲインタイムテーブルT2を参照し、走査ミラー12の時間位置t1,...,tnに基づいてゲイン(相対値)を読み出す。時間位置tnは、スキャン終点を示す。ゲイン制御回路31−1は、読み出したゲインを示すゲイン設定信号をアンプ回路34−1に出力し、アンプ回路34−1のゲインを制御する。尚、走査ミラー12の時間位置から走査ミラー12の角度位置を求めることができるので、時間カウンタ33−3が走査ミラー12の角度位置を示す位置信号を出力する場合には、ゲインタイムテーブルT2の代わりに上記ゲイン設定テーブルT1を用いるようにしても良い。
【0031】
図9(b)のゲインタイムテーブルT2は、水平走査範囲21が180度、垂直走査範囲22が140度、投光角拡大レンズ13の倍率が5倍、投光角度が5×(ミラー角度×2)である場合のゲインを示す。この場合、水平方向の投光角度Ahは−90度≦Ah≦90度、水平方向のミラー角度Mh−9度≦Mh≦9度である。また、垂直方向の投光角度Avは−70度≦Av≦70度、垂直方向のミラー角度Mv−7度≦Mv≦7度である。
【0032】
投光角度は走査ミラー12の角度で決まるので、時間カウンタ33−3を設け、ゲイン制御回路31−1において位置信号に基づいてゲインタイムテーブルT2を参照しながらアンプ回路34−1のゲインの設定を繰り返し、PD15による受光を行う。これにより、投光領域23内で同じ測定対象物が投光角拡大レンズ13から同じ距離に位置する場合、測定対象物が互いに異なる角度位置に存在しても、アンプ回路34−1からは同じ受光振幅を得ることができ、位置測定精度を向上することができる。
【0033】
このように、投光方向(または、受光角度)による受光感度の変化(広角側ほど感度が低下しやすい)、および単位面積当たりの投光レーザパワーの変動(広角側のレーザビームの形状は広がりやすいか、あるいは、強度が低下しやすい)を補正するため、走査ミラー12の角度(即ち、投光角度)に依存する時間位置に基づいてゲインタイムテーブルT2を参照する。ゲインタイムテーブルT2から読み出したゲインに基づいてアンプ回路34−1のゲインを可変制御することで、アンプ回路34−1から出力される受光振幅を適切に補正することが可能となる。
【0034】
(第3実施例)
次に、投光レーザパワーの補正を行う第3実施例について、図10乃至図12と共に説明する。本実施例における光学系の構成は、上記第1実施例の場合と同様で良い。図10は、第3実施例の動作を説明する図であり、図11は、第3実施例の制御系の構成の一例を示すブロック図である。また、図12は、第3実施例で用いるテーブルの一例を説明する図である。
【0035】
図10において、(a)はLD10の投光レーザパワー(任意単位)と投光角度の関係を示し、(b)はPD15の受光感度(任意単位)と投光角度の関係を示す。図10(a),(b)からもわかるように、投光角度が大きくなり±90度に近づくと、投光レーザパワーおよび受光感度が低下する。そこで、本実施例の距離測定装置1では、図10(c)のような光出射パワー(任意単位)と投光角度の補正データを用いて、同じ距離の測定対象物から戻ってくるレーザビームをPD15で検出した受光振幅(任意単位)が図10(d)に示すように一定となるように、LD10の光出射パワーを投光角に応じて補正する。
【0036】
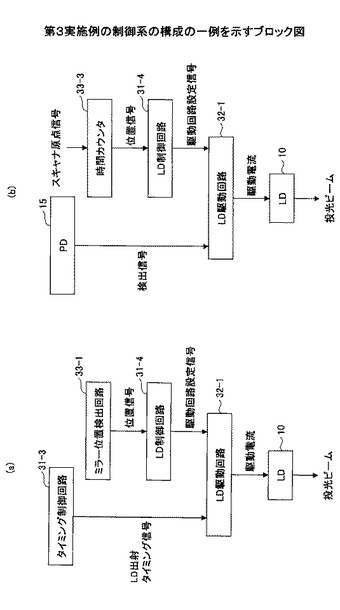
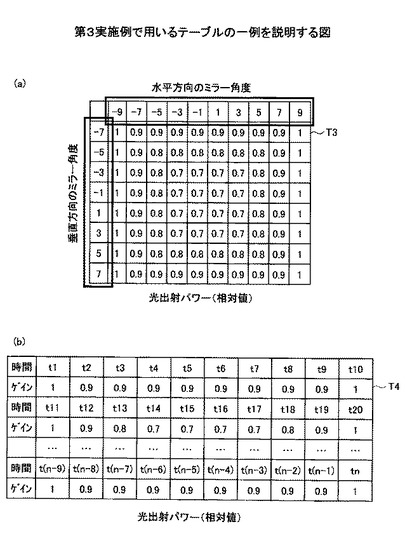
図11において、(a)は直接検出された走査ミラー12の位置に応じてLD10の光出射パワーを補正する場合の制御系を示し、(b)は時間に基づいて検出された走査ミラー12の位置に応じてLD10の光出射パワーを補正する場合の制御系を示す。また、図12において、(a)は図11(a)で用いるパワー設定テーブルを示し、(b)は図11(b)で用いるパワータイムテーブルを示す。
【0037】
図11(a)において、制御系のシステム制御回路31はタイミング制御回路31−3とLD制御回路31−4を有し、LD制御回路32はLD駆動回路32−1を有し、ミラー制御回路33はミラー位置検出回路33−1を有する。ミラー位置検出回路33−1は、周知の方法で走査ミラー12の角度位置(即ち、水平方向のミラー角度と垂直方向のミラー角度)を検出し、角度位置を示す位置信号をLD制御回路31−4に出力する。LD制御回路31−4は、例えばシステム制御回路31内の記憶部に格納された図12(a)に示す如きパワー設定テーブルT3を参照し、位置信号が示す水平方向のミラー角度及び垂直方向のミラー角度に基づいて光出射パワー(相対値)を読み出す。LD制御回路31−4は、読み出した光出射パワーを示す駆動回路設定信号をLD駆動回路32−1に出力し、LD10の光出射パワーを制御する。一方、タイミング制御回路31−3は、予め決められているか、あるいは、システム制御回路31に入力されたLD10のレーザ出射タイミングを示すLD出射タイミング信号をLD駆動回路32−1に出力し、LD10のレーザ出射タイミングを制御する。これにより、LD駆動回路32−1は、駆動回路設定信号で設定された光出射パワーのレーザビームを、LD出射タイミング信号で示されたレーザ出射タイミングで出射するための駆動電流をLD10に出力する。
【0038】
図12(a)のパワー設定テーブルT3は、水平走査範囲21が180度、垂直走査範囲22が140度、投光角拡大レンズ13の倍率が5倍、投光角度が5×(ミラー角度×2)である場合の光出射パワーを示す。この場合、水平方向の投光角度Ahは−90度≦Ah≦90度、水平方向のミラー角度Mhは−9度≦Mh≦9度である。また、垂直方向の投光角度Avは−70度≦Av≦70度、垂直方向のミラー角度Mvは−7度≦Mv≦7度である。
【0039】
投光角度は走査ミラー12の角度で決まるので、ミラー位置検出回路33−1を設け、LD制御回路31−4において位置信号に基づいてパワー設定テーブルT3を参照しながらLD10の光出射パワーの設定を繰り返し、LD10によるレーザビームの出射を行う。これにより、投光領域23内で同じ測定対象物が投光角拡大レンズ13から同じ距離に位置する場合、測定対象物が互いに異なる角度位置に存在しても、PD15からは同じ受光振幅を得ることができ、位置測定精度を向上することができる。
【0040】
このように、投光方向(または、受光角度)による受光感度の変化(広角側ほど感度が低下しやすい)、および単位面積当たりの投光レーザパワーの変動(広角側のレーザビームの形状は広がりやすいか、あるいは、強度が低下しやすい)を補正するため、走査ミラー12の角度(即ち、投光角度)に基づいてパワー設定テーブルT3を参照する。パワー設定テーブルT3から読み出した光出射パワーに基づいてLD10の駆動電流を可変制御することで、LD10から出射されるレーザビームの光出射パワーを適切に補正してPD15からは同じ受光振幅が得られるようにすることが可能となる。
【0041】
一方、図11(b)において、制御系のシステム制御回路31はLD制御回路31−4を有し、LD制御回路32はLD駆動回路32−1を有し、ミラー制御回路33は時間カウンタ33−3を有する。PD15は、検出信号をLD駆動回路32−2に出力する。時間カウンタ33−3は、周知の方法で求めた2次元スキャナのスキャン原点(または、基準点)を示すスキャナ原点信号が得られた時点からの経過時間をカウントすることで走査ミラー12の時間位置を示す位置信号を生成してLD制御回路31−4に出力する。LD制御回路31−4は、例えばシステム制御回路31内の記憶部に格納された図12(b)に示す如きパワータイムテーブルT4を参照し、走査ミラー12の時間位置t1,...,tnに基づいて光出射パワー(相対値)を読み出す。LD制御回路31−4は、読み出した光出射パワーを示す駆動回路設定信号をLD駆動回路32−1に出力し、LD10の光出射パワーを制御する。これにより、LD駆動回路32−1は、駆動回路設定信号で設定された光出射パワーのレーザビームを、検出信号で示されたレーザ出射タイミングで出射するための駆動電流をLD10に出力する。尚、走査ミラー12の時間位置から走査ミラー12の角度位置を求めることができるので、時間カウンタ33−3が走査ミラー12の角度位置を示す位置信号を出力する場合には、パワータイムテーブルT4の代わりに上記パワー設定テーブルT3を用いるようにしても良い。
【0042】
図12(b)のパワータイムテーブルT4は、水平走査範囲21が180度、垂直走査範囲22が140度、投光角拡大レンズ13の倍率が5倍、投光角度が5×(ミラー角度×2)である場合の光出射パワーを示す。この場合、水平方向の投光角度Ahは−90度≦Ah≦90度、水平方向のミラー角度Mh−9度≦Mh≦9度である。また、垂直方向の投光角度Avは−70度≦Av≦70度、垂直方向のミラー角度Mv−7度≦Mv≦7度である。
【0043】
投光角度は走査ミラー12の角度で決まるので、時間カウンタ33−3を設け、LD制御回路31−4において位置信号に基づいてパワータイムテーブルT4を参照しながらLD10の光出射パワーの設定を繰り返し、LD10によるレーザビームの出射を行う。これにより、投光領域23内で同じ測定対象物が投光角拡大レンズ13から同じ距離に位置する場合、測定対象物が互いに異なる角度位置に存在しても、PD15からは同じ受光振幅を得ることができ、位置測定精度を向上することができる。
【0044】
このように、投光方向(または、受光角度)による受光感度の変化(広角側ほど感度が低下しやすい)、および単位面積当たりの投光レーザパワーの変動(広角側のレーザビームの形状は広がりやすいか、あるいは、強度が低下しやすい)を補正するため、走査ミラー12の角度(即ち、投光角度)に依存する時間位置に基づいてパワータイムテーブルT4を参照する。パワータイムテーブルT4から読み出した光出射パワーに基づいてLD10の駆動電流を可変制御することで、LD10から出射されるレーザビームの光出射パワーを適切に補正してPD15からは同じ受光振幅が得られるようにすることが可能となる。
【0045】
(第4実施例)
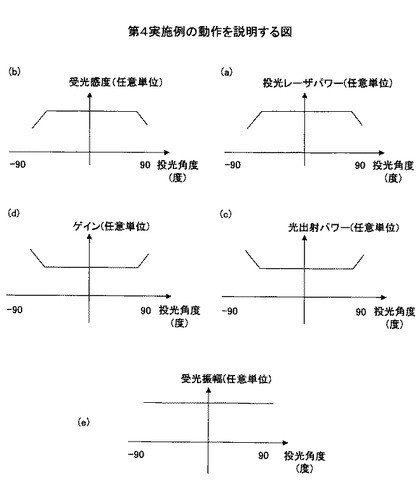
次に、投光レーザパワーの補正を行う第4実施例について、図13と共に説明する。本実施例における光学系の構成は、上記第1実施例の場合と同様で良い。又、制御系の構成は、図8及び図11に示す第2実施例および第3実施例の場合と同様で良い。図13は、第4実施例の動作を説明する図である。
【0046】
本実施例では、上記第2実施例および上記第3実施例を組み合わせる。図13において、(a)はLD10の投光レーザパワー(任意単位)と投光角度の関係を示し、(b)はPD15の受光感度(任意単位)と投光角度の関係を示す。図13(a),(b)からもわかるように、投光角度が大きくなり±90度に近づくと、投光レーザパワーおよび受光感度が低下する。そこで、本実施例の距離測定装置1では、図13(c)のような光出射パワー(任意単位)と投光角度の補正データを用いて、同じ距離の測定対象物から戻ってくるレーザビームをPD15で検出した受光振幅(任意単位)が図13(e)に示すように一定となるように、LD10の光出射パワーを投光角に応じて補正すると共に、図13(d)のようなゲイン(任意単位)と投光角度の補正データを用いて、同じ距離の測定対象物から戻ってくるレーザビームをPD15で検出してアンプ回路34−1で増幅した後の受光振幅(任意単位)が図13(e)に示すように一定となるように補正する。
【0047】
これにより、投光領域23内で同じ測定対象物が投光角拡大レンズ13から同じ距離に位置する場合、測定対象物が互いに異なる角度位置に存在しても、PD15からは同じ受光振幅を得ることができると共に、アンプ回路34−1からは同じ受光振幅を得ることができ、位置測定精度を向上することができる。
【0048】
尚、図8(a)の制御系および図11(a)の制御系を組み合わせた場合、ミラー位置検出回路33−1を共用できるので、回路構成を簡略化することができる。同様に、図8(b)の制御系および図11(b)の制御系を組み合わせた場合、時間カウンタ33−3を共用できるので、回路構成を簡略化することができる。言うまでもなく、図8(a)および図11(b)に示す制御系を組み合わせても良く、図8(b)および図11(a)に示す制御系を組み合わせても良い。
【0049】
以上の実施例を含む実施形態に関し、さらに以下の付記を開示する。
(付記1)
2次元スキャナおよび投光角拡大レンズを含み、投光ビームを前方に投光する投光系と、
前記投光系のビーム走査角度と同等以上の受光視野角を有すると共に、受光に関する第1の光路が前記投光角拡大レンズの投光に関する第2の光路と独立しており、前記投光角拡大レンズより前方、且つ、前記投光ビームの投光領域より後方に配置された受光レンズを含む受光系とを備えたことを特徴とする、距離測定装置。
(付記2)
前記投光系のビーム走査角度は、水平方向と垂直方向で検出角度範囲が異なることを特徴とする、付記1記載の距離測定装置。
(付記3)
前記投光系のビーム走査角度は、水平方向の検出角度範囲が垂直方向の検出角度範囲より広いことを特徴とする、付記1記載の距離測定装置。
(付記4)
前記受光レンズで受光したビームを検出する受光部と、
前記受光部の検出信号を増幅する増幅回路と、
前記投光角拡大レンズの投光角度に応じて前記増幅回路の利得を制御する制御回路
を更に備えたことを特徴とする、付記2または3記載の距離測定装置。
(付記5)
前記制御回路は、前記投光角度に対する利得が予め格納されたテーブルを用いて前記増幅回路の利得を制御することを特徴とする、付記4記載の距離測定装置。
(付記6)
前記2次元スキャナ内の走査ミラーのミラー角度を検出して角度位置を示す位置信号を出力する検出回路
を更に備え、
前記制御回路は、前記位置信号に基づいて前記投光角度に対する利得を前記テーブルから読み出すことを特徴とする、付記5記載の距離測定装置。
(付記7)
前記制御回路は、スキャン原点からスキャン終点までの時間に対する利得が予め格納されたテーブルを用いて前記増幅回路の利得を制御することを特徴とする、付記4記載の距離測定装置。
(付記8)
前記スキャン原点から前記スキャン終点までの時間をカウントして前記2次元スキャナ内の走査ミラーの時間位置を示す位置信号を出力するカウンタ
を更に備え、
前記制御回路は、前記位置信号に基づいて前記走査ミラーの時間位置に対する利得を前記テーブルから読み出すことを特徴とする、付記7記載の距離測定装置。
(付記9)
光ビームを出射する光源と、
前記投光角拡大レンズの投光角度に応じて前記光源の光出射パワーを制御する制御回路
を更に備えたことを特徴とする、付記2乃至8のいずれか1項記載の距離測定装置。
(付記10)
前記制御回路は、前記投光角度に対する光出射パワーが予め格納されたテーブルを用いて前記光源の光出射パワーを制御することを特徴とする、付記9記載の距離測定装置。
(付記11)
前記2次元スキャナ内の走査ミラーのミラー角度を検出して角度位置を示す位置信号を出力する検出回路
を更に備え、
前記制御回路は、前記位置信号に基づいて前記投光角度に対する光出射パワーを前記テーブルから読み出すことを特徴とする、付記10記載の距離測定装置。
(付記12)
前記制御回路は、スキャン原点からスキャン終点までの時間に対する光出射パワーが予め格納されたテーブルを用いて前記光源の光出射パワーを制御することを特徴とする、付記9記載の距離測定装置。
(付記13)
前記スキャン原点から前記スキャン終点までの時間をカウントして前記2次元スキャナ内の走査ミラーの時間位置を示す位置信号を出力するカウンタ
を更に備え、
前記制御回路は、前記位置信号に基づいて前記走査ミラーの時間位置に対する光出射パワーを前記テーブルから読み出すことを特徴とする、付記12記載の距離測定装置。
(付記14)
前記投光系及び前記受光系を収納する筐体
を更に備え、
前記受光レンズは前記投光角拡大レンズより前記筐体の上方、且つ、前記筐体の後方に配置されていることを特徴とする、付記2乃至13のいずれか1項記載の距離測定装置。
【0050】
以上、開示の距離測定装置を実施例により説明したが、本発明は上記実施例に限定されるものではなく、本発明の範囲内で種々の変形および改良が可能であることは言うまでもない。
【符号の説明】
【0051】
1 距離測定装置
10 LD
12 走査ミラー
13 投光角拡大レンズ
14 受光レンズ
15 PD
31 システム制御回路
32 LD制御回路
33 ミラー制御回路
34 PD信号処理回路
【技術分野】
【0001】
本発明は、距離測定装置に関する。
【背景技術】
【0002】
近年、レーザレンジファインダ(LRF:Laser Range Finder)などの距離測定装置は、対象物までの距離の計測に限らず、例えば自動車などにおける障害物の検知、鉄道のホームにおける車両と開閉扉間の人検知などの周辺監視の目的にも利用されている。
【0003】
また、自動車などの車両の運転者の視認性向上のため、車載カメラシステムも提案されている。車載カメラシステムのカメラの撮像範囲は、超広角レンズの効果により例えば水平180度、垂直140度程度である。このようなカメラで取得した周囲画像データに、距離測定装置で測定した距離情報を加えることで、例えば周囲画像データの歪みを補正するなどして周辺監視の精度を向上することができる。例えば、車両の後退時に周囲の人や物を確実に検出して、車両を安全に後退させることが可能となる。しかし、撮像範囲内の各部位までの距離情報を得ようとした場合、現在市販されている距離測定装置の監視対象領域が比較的狭いことから、距離検出範囲がカメラの画角と比べて非常に狭い。このため、カメラの画角にも対応できるような広検出角度を有する距離測定装置が望まれている。
【0004】
距離測定装置の検出角度を向上させるため、走査ミラーと走査拡大レンズの組み合わせを用いて走査角度を大きくする構成が提案されている(例えば、特許文献1)。しかし、この提案されている構成では、投光と受光を同じレンズ系を介して(即ち、同軸で)行うため、ビームスプリッタを利用する必要があり、光の利用効率が低い。また、投光系は可能な限り平行光を出射するように設計されるが、受光系は対象物から戻ってくる微弱光をできる限り取り込むように設計されるので、両者の設計方針は異なる。このため、投光角拡大レンズと受光レンズは、設計方針を考慮すると別々のレンズ系で形成される方が好ましい。一方、受光効率を向上するには受光レンズのレンズ径を大きくすれば良いが、距離測定装置全体の装置サイズが大きくなってしまうため、装置サイズを考慮すると受光レンズのレンズ径の増大は好ましくない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−58341号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来の距離測定装置では、比較的小型の構成で受光効率を向上して比較的広い距離検出範囲で距離を測定することは難しい。
【0007】
そこで、本発明は、比較的小型の構成で受光効率を向上して比較的広い距離検出範囲で距離を測定可能な距離測定装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一観点によれば、2次元スキャナおよび投光角拡大レンズを含み、投光ビームを前方に投光する投光系と、前記投光系のビーム走査角度と同等以上の受光視野角を有すると共に、受光に関する第1の光路が前記投光角拡大レンズの投光に関する第2の光路と独立しており、前記投光角拡大レンズより前方、且つ、前記投光ビームの投光領域より後方に配置された受光レンズを含む受光系とを備えたことを特徴とする距離測定装置が提供される。
【発明の効果】
【0009】
開示の距離測定装置によれば、比較的小型の構成で受光効率を向上して比較的広い距離検出範囲で距離を測定可能することが可能となる。
【図面の簡単な説明】
【0010】
【図1】第1実施例における光学系を示す斜視図である。
【図2】第1実施例における光学系を示す側面図である。
【図3】第1実施例における制御系および光学系を示す図である。
【図4】第1実施例における筐体を示す斜視図である。
【図5】受光光量増加量と距離L1との関係を示す図である。
【図6】2次元スキャナの例を説明する図である。
【図7】第2実施例の動作を説明する図である。
【図8】第2実施例の制御系の構成の一例を示すブロック図である。
【図9】第2実施例で用いるテーブルの一例を説明する図である。
【図10】第3実施例の動作を説明する図である。
【図11】第3実施例の制御系の構成の一例を示すブロック図である。
【図12】第3実施例で用いるテーブルの一例を説明する図である。
【図13】第4実施例の動作を説明する図である。
【発明を実施するための形態】
【0011】
開示の距離測定装置は、2次元スキャナおよび投光角拡大レンズを含む投光系と、投光系のビーム走査角度と同等以上の受光視野角を有すると共に、受光に関する第1の光路が投光角拡大レンズの投光に関する第2の光路と独立しており、投光角拡大レンズより前方、且つ、投光ビームの投光領域より後方に配置された受光レンズを含む受光系とを備える。
【0012】
以下に、開示の距離測定装置の各実施例を図面と共に説明する。
【実施例】
【0013】
(第1実施例)
図1は、第1実施例における光学系を示す斜視図であり、図2は、第1実施例における光学系を示す側面図である。図1および図2に示すように、距離測定装置1は、光源の一例であるレーザダイオード(LD:Laser Diode)10、コリメータレンズ11、走査ミラー12、投光角拡大レンズ13、受光レンズ14、および受光部の一例であるフォトダイオード(PD:Photo Diode)15を有する。図1および図2では、説明の便宜上、LD10および走査ミラー12の制御系の図示は省略する。LD10、コリメータレンズ11、走査ミラー12、および投光角拡大レンズ13は、投光系を形成する。投光系は、水平走査範囲21と垂直走査範囲22でLD10からのレーザビームを走査させることで、投光領域23内の測定対象物にレーザビーム(即ち、投光ビーム)を照射する。一方、受光レンズ14およびPD15は、受光系を形成する。走査ミラー12および図1および図2では図示を省略するミラー制御回路(または、駆動回路)は、2次元スキャナの一例を形成する。2次元スキャナは、例えば2軸のMEMS(Micro Electro Mechanical System)で形成可能である。図5と共に後述するように、2次元スキャナの構成は特に限定されない。
【0014】
例えば車載カメラシステム(図示せず)のカメラの場合、水平方向の検出角度は180度と比較的広くする必要があるが、垂直方向に関しては、検出範囲を広げても路面または空を検出することになるため、140度程度とある程度狭くても良い。つまり、水平方向と垂直方向で検出角度範囲が異なるものであっても、同じであるものであっても良い。距離測定装置1は、例えばこのような車載カメラシステムと組み合わせて使用することで、カメラで取得した周囲画像データに距離測定装置1で測定した距離情報を加えることで、例えば周囲画像データの歪みを補正するなどして周辺監視の精度を向上することができる。
【0015】
本実施例では、2次元スキャナと投光角拡大レンズ13を含む投光系を有する距離測定装置1において、受光系は投光ビームの走査角度と同等以上の受光視野角を有し、受光レンズ14のが投光角拡大レンズ13の光軸13Aに重ならないように配置している。受光レンズ14の検出角度が投光角拡大レンズ13の投光角度と異なるので、図2に示すように、受光レンズ14を投光角拡大レンズ13より距離L1だけ前方に配置できる。また、受光レンズ14を投光ビームの投光領域23より後方に配置して、受光効率を向上させることが可能となる。図2において、L2は、受光レンズ14の光軸14Aと投光角拡大レンズ13の光軸13Aとの間の光軸間距離を示す。尚、検出範囲を規定する方向については、わかりやすくするため垂直方向および水平方向としたが、この限りではない。
【0016】
図3は、第1実施例における制御系および光学系を示す図である。図3において、制御系は、システム制御回路31、LD制御回路32、ミラー制御回路33、及びPD信号処理回路34を含む。システム制御回路31は、例えばCPU(Central Processing Unit)などのプロセッサで形成可能であり、距離測定装置1全体の制御を司る。CPUが実行するプログラムを格納する記憶部(図示せず)は、システム制御回路31内でCPUに接続されていても、システム制御回路31に外部接続されていても良い。LD制御回路32は、システム制御回路31の制御下でLD10のオン、オフ、光出射パワーなどを制御する。ミラー制御回路33は、システム制御回路31の制御下で走査ミラー12の位置を検出する回路部、走査ミラー12の位置の検出結果に基づいて走査ミラー12を駆動する制御信号を生成する回路部、および制御信号に基づいて走査ミラー12を駆動する回路部を有する。PD信号処理回路34は、システム制御回路31の制御下でPD15からの検出信号に所定の信号処理を施してシステム制御回路31などに出力する。システム制御回路31は、PD信号処理回路34からの所定の信号処理を施された信号に基づいて距離情報を生成する。上記の如き制御系自体の構成および動作は周知であるため、本明細書ではその詳細な説明は省略する。尚、システム制御回路31を形成するCPUは、LD制御回路32、ミラー制御回路33、及びPD信号処理回路34の少なくとも一部の機能を実現しても良い。
【0017】
図4は、第1実施例における筐体を示す斜視図である。図4に示すように、図3に示す制御系及び光学系は、筐体30に収納されている。筐体30の形状は特に限定されないが、図4に示す例では平行六面体の箱形である。投光角拡大レンズ13と受光レンズ14の位置関係は、図2に示した通りである。図4の例では、XYZ座標系で表すと、水平方向はXZ平面と平行な方向であり、垂直方向はXY軸と平行な方向である。
【0018】
図4は、受光レンズ14が投光角拡大レンズ13よりY方向に沿って筐体30の上方、且つ、X方向に沿って筐体30の後方に配置されている場合を示すが、レンズ13,14の配置はこの例の配置に限定されるものではない。
【0019】
例えば、本実施例では投光角度が水平180度(水平走査範囲21)、垂直140度(垂直走査範囲22)、投光角拡大レンズ13のレンズ径が40mmである。また、受光レンズ14のレンズ視野が水平180度、垂直180度、受光レンズ14のレンズ径が40mmである。さらに、距離L1は20mm、光軸間距離L2は75mmである。投光角拡大レンズ13の光軸に沿って投光角拡大レンズ13から例えば50cm離れた測定対象物からの受光光量は、受光レンズ14が距離L1だけ前方にない場合(即ち、L1=0の場合)と比較すると、例えば10%向上され、距離の検出精度が向上することが確認された。
【0020】
同様に、例えば光軸間距離L2が75mmであり、光学系の他の条件が上記の場合と同様であると、投光角拡大レンズ13の光軸に沿って投光角拡大レンズ13から例えば45cm離れた測定対象物からの受光光量は、受光レンズ14が距離L1だけ前方にない場合と比較すると、例えば20%向上され、距離の検出精度が向上することが確認された。図5は、この場合のPD15の受光光量増加量(%)と距離L1との関係を示す図である。図5からもわかるように、距離L1が増加するにつれて、受光光量増加量も増加する。
【0021】
水平走査範囲21が180度、垂直走査範囲22が140度、各レンズ13,14のレンズ径が10mm、距離L1が3.6mm、光軸間距離L2が20mmの場合、受光レンズ14が距離L1だけ前方にない場合と比較すると、例えば10%向上され、距離の検出精度が向上することが確認された。
【0022】
図6は、2次元スキャナの例を説明する図である。図6において、(a)は走査ミラー12が2軸のMEMS12Aで形成された例、(b)は走査ミラー12がMEMSミラーまたはガルバノミラー12B−1と1軸ポリゴンミラー12B−2で形成された例、(c)は走査ミラー12が1軸のMEMS12C−1,12C−2で形成された例、(d)は走査ミラー12が1軸のMEMSミラー12D−1と1軸のガルバノミラー12D−2で形成された例を夫々示す。図6(a)乃至(d)の各ミラー12自体の構成、駆動および制御は周知であるため、本明細書ではその詳細な説明は省略する。
【0023】
(第2実施例)
次に、受光ゲインの補正を行う第2実施例について、図7乃至図9と共に説明する。本実施例における光学系の構成は、上記第1実施例の場合と同様で良い。図7は、第2実施例の動作を説明する図であり、図8は、第2実施例の制御系の構成の一例を示すブロック図である。また、図9は、第2実施例で用いるテーブルの一例を説明する図である。
【0024】
図7において、(a)はLD10の投光レーザパワー(任意単位)と投光角度の関係を示し、(b)はPD15の受光感度(任意単位)と投光角度の関係を示す。図7(a),(b)からもわかるように、投光角度が大きくなり±90度に近づくと、投光レーザパワーおよび受光感度が低下する。そこで、本実施例の距離測定装置1では、図7(c)のようなゲイン(任意単位)と投光角度の補正データを用いて、同じ距離の測定対象物から戻ってくるレーザビームをPD15で検出してアンプ回路34−1で増幅した後の受光振幅(任意単位)が図7(d)に示すように一定となるように補正する。
【0025】
図8において、(a)は直接検出された走査ミラー12の位置に応じて受光振幅を補正する場合の制御系を示し、(b)は時間に基づいて検出された走査ミラー12の位置に応じて受光振幅を補正する場合の制御系を示す。また、図9において、(a)は図8(a)で用いるゲイン設定テーブルを示し、(b)は図8(b)で用いるゲインタイムテーブルを示す。
【0026】
図8(a)において、制御系のシステム制御回路31はゲイン(または、利得)制御回路31−1を有し、ミラー制御回路33はミラー位置検出回路33−1を有し、PD信号処理回路34はアンプ(または、増幅)回路34−1を有する。PD15は、検出信号をアンプ回路34−1に出力する。ミラー位置検出回路33−1は、周知の方法で走査ミラー12の角度位置(即ち、水平方向のミラー角度と垂直方向のミラー角度)を検出し、角度位置を示す位置信号をゲイン制御回路31−1に出力する。ゲイン制御回路31−1は、例えばシステム制御回路31内の記憶部に格納された図9(a)に示す如きゲイン設定テーブルT1を参照し、位置信号が示す水平方向のミラー角度及び垂直方向のミラー角度に基づいてゲイン(相対値)を読み出す。ゲイン制御回路31−1は、読み出したゲインを示すゲイン設定信号をアンプ回路34−1に出力し、アンプ回路34−1のゲインを制御する。
【0027】
図9(a)のゲイン設定テーブルT1は、水平走査範囲21が180度、垂直走査範囲22が140度、投光角拡大レンズ13の倍率が5倍、投光角度が5×(ミラー角度×2)である場合のゲインを示す。この場合、水平方向の投光角度Ahは−90度≦Ah≦90度、水平方向のミラー角度Mhは−9度≦Mh≦9度である。また、垂直方向の投光角度Avは−70度≦Av≦70度、垂直方向のミラー角度Mvは−7度≦Mv≦7度である。
【0028】
投光角度は走査ミラー12の角度で決まるので、ミラー位置検出回路33−1を設け、ゲイン制御回路31−1において位置信号に基づいてゲイン設定テーブルT1を参照しながらアンプ回路34−1のゲインの設定を繰り返し、PD15による受光を行う。これにより、投光領域23内で同じ測定対象物が投光角拡大レンズ13から同じ距離に位置する場合、測定対象物が互いに異なる角度位置に存在しても、アンプ回路34−1からは同じ受光振幅を得ることができ、位置測定精度を向上することができる。
【0029】
このように、投光方向(または、受光角度)による受光感度の変化(広角側ほど感度が低下しやすい)、および単位面積当たりの投光レーザパワーの変動(広角側のレーザビームの形状は広がりやすいか、あるいは、強度が低下しやすい)を補正するため、走査ミラー12の角度(即ち、投光角度)に基づいてゲイン設定テーブルT1を参照する。ゲイン設定テーブルT1から読み出したゲインに基づいてアンプ回路34−1のゲインを可変制御することで、アンプ回路34−1から出力される受光振幅を適切に補正することが可能となる。
【0030】
一方、図8(b)において、制御系のシステム制御回路31はゲイン制御回路31−1を有し、ミラー制御回路33は時間カウンタ33−3を有し、PD信号処理回路34はアンプ回路34−1を有する。PD15は、検出信号をアンプ回路34−1に出力する。時間カウンタ33−3は、周知の方法で求めた2次元スキャナのスキャン原点(または、基準点)を示すスキャナ原点信号が得られた時点からの経過時間をカウントすることで走査ミラー12の時間位置を示す位置信号を生成してゲイン制御回路31−1に出力する。ゲイン制御回路31−1は、例えばシステム制御回路31内の記憶部に格納された図9(b)に示す如きゲインタイムテーブルT2を参照し、走査ミラー12の時間位置t1,...,tnに基づいてゲイン(相対値)を読み出す。時間位置tnは、スキャン終点を示す。ゲイン制御回路31−1は、読み出したゲインを示すゲイン設定信号をアンプ回路34−1に出力し、アンプ回路34−1のゲインを制御する。尚、走査ミラー12の時間位置から走査ミラー12の角度位置を求めることができるので、時間カウンタ33−3が走査ミラー12の角度位置を示す位置信号を出力する場合には、ゲインタイムテーブルT2の代わりに上記ゲイン設定テーブルT1を用いるようにしても良い。
【0031】
図9(b)のゲインタイムテーブルT2は、水平走査範囲21が180度、垂直走査範囲22が140度、投光角拡大レンズ13の倍率が5倍、投光角度が5×(ミラー角度×2)である場合のゲインを示す。この場合、水平方向の投光角度Ahは−90度≦Ah≦90度、水平方向のミラー角度Mh−9度≦Mh≦9度である。また、垂直方向の投光角度Avは−70度≦Av≦70度、垂直方向のミラー角度Mv−7度≦Mv≦7度である。
【0032】
投光角度は走査ミラー12の角度で決まるので、時間カウンタ33−3を設け、ゲイン制御回路31−1において位置信号に基づいてゲインタイムテーブルT2を参照しながらアンプ回路34−1のゲインの設定を繰り返し、PD15による受光を行う。これにより、投光領域23内で同じ測定対象物が投光角拡大レンズ13から同じ距離に位置する場合、測定対象物が互いに異なる角度位置に存在しても、アンプ回路34−1からは同じ受光振幅を得ることができ、位置測定精度を向上することができる。
【0033】
このように、投光方向(または、受光角度)による受光感度の変化(広角側ほど感度が低下しやすい)、および単位面積当たりの投光レーザパワーの変動(広角側のレーザビームの形状は広がりやすいか、あるいは、強度が低下しやすい)を補正するため、走査ミラー12の角度(即ち、投光角度)に依存する時間位置に基づいてゲインタイムテーブルT2を参照する。ゲインタイムテーブルT2から読み出したゲインに基づいてアンプ回路34−1のゲインを可変制御することで、アンプ回路34−1から出力される受光振幅を適切に補正することが可能となる。
【0034】
(第3実施例)
次に、投光レーザパワーの補正を行う第3実施例について、図10乃至図12と共に説明する。本実施例における光学系の構成は、上記第1実施例の場合と同様で良い。図10は、第3実施例の動作を説明する図であり、図11は、第3実施例の制御系の構成の一例を示すブロック図である。また、図12は、第3実施例で用いるテーブルの一例を説明する図である。
【0035】
図10において、(a)はLD10の投光レーザパワー(任意単位)と投光角度の関係を示し、(b)はPD15の受光感度(任意単位)と投光角度の関係を示す。図10(a),(b)からもわかるように、投光角度が大きくなり±90度に近づくと、投光レーザパワーおよび受光感度が低下する。そこで、本実施例の距離測定装置1では、図10(c)のような光出射パワー(任意単位)と投光角度の補正データを用いて、同じ距離の測定対象物から戻ってくるレーザビームをPD15で検出した受光振幅(任意単位)が図10(d)に示すように一定となるように、LD10の光出射パワーを投光角に応じて補正する。
【0036】
図11において、(a)は直接検出された走査ミラー12の位置に応じてLD10の光出射パワーを補正する場合の制御系を示し、(b)は時間に基づいて検出された走査ミラー12の位置に応じてLD10の光出射パワーを補正する場合の制御系を示す。また、図12において、(a)は図11(a)で用いるパワー設定テーブルを示し、(b)は図11(b)で用いるパワータイムテーブルを示す。
【0037】
図11(a)において、制御系のシステム制御回路31はタイミング制御回路31−3とLD制御回路31−4を有し、LD制御回路32はLD駆動回路32−1を有し、ミラー制御回路33はミラー位置検出回路33−1を有する。ミラー位置検出回路33−1は、周知の方法で走査ミラー12の角度位置(即ち、水平方向のミラー角度と垂直方向のミラー角度)を検出し、角度位置を示す位置信号をLD制御回路31−4に出力する。LD制御回路31−4は、例えばシステム制御回路31内の記憶部に格納された図12(a)に示す如きパワー設定テーブルT3を参照し、位置信号が示す水平方向のミラー角度及び垂直方向のミラー角度に基づいて光出射パワー(相対値)を読み出す。LD制御回路31−4は、読み出した光出射パワーを示す駆動回路設定信号をLD駆動回路32−1に出力し、LD10の光出射パワーを制御する。一方、タイミング制御回路31−3は、予め決められているか、あるいは、システム制御回路31に入力されたLD10のレーザ出射タイミングを示すLD出射タイミング信号をLD駆動回路32−1に出力し、LD10のレーザ出射タイミングを制御する。これにより、LD駆動回路32−1は、駆動回路設定信号で設定された光出射パワーのレーザビームを、LD出射タイミング信号で示されたレーザ出射タイミングで出射するための駆動電流をLD10に出力する。
【0038】
図12(a)のパワー設定テーブルT3は、水平走査範囲21が180度、垂直走査範囲22が140度、投光角拡大レンズ13の倍率が5倍、投光角度が5×(ミラー角度×2)である場合の光出射パワーを示す。この場合、水平方向の投光角度Ahは−90度≦Ah≦90度、水平方向のミラー角度Mhは−9度≦Mh≦9度である。また、垂直方向の投光角度Avは−70度≦Av≦70度、垂直方向のミラー角度Mvは−7度≦Mv≦7度である。
【0039】
投光角度は走査ミラー12の角度で決まるので、ミラー位置検出回路33−1を設け、LD制御回路31−4において位置信号に基づいてパワー設定テーブルT3を参照しながらLD10の光出射パワーの設定を繰り返し、LD10によるレーザビームの出射を行う。これにより、投光領域23内で同じ測定対象物が投光角拡大レンズ13から同じ距離に位置する場合、測定対象物が互いに異なる角度位置に存在しても、PD15からは同じ受光振幅を得ることができ、位置測定精度を向上することができる。
【0040】
このように、投光方向(または、受光角度)による受光感度の変化(広角側ほど感度が低下しやすい)、および単位面積当たりの投光レーザパワーの変動(広角側のレーザビームの形状は広がりやすいか、あるいは、強度が低下しやすい)を補正するため、走査ミラー12の角度(即ち、投光角度)に基づいてパワー設定テーブルT3を参照する。パワー設定テーブルT3から読み出した光出射パワーに基づいてLD10の駆動電流を可変制御することで、LD10から出射されるレーザビームの光出射パワーを適切に補正してPD15からは同じ受光振幅が得られるようにすることが可能となる。
【0041】
一方、図11(b)において、制御系のシステム制御回路31はLD制御回路31−4を有し、LD制御回路32はLD駆動回路32−1を有し、ミラー制御回路33は時間カウンタ33−3を有する。PD15は、検出信号をLD駆動回路32−2に出力する。時間カウンタ33−3は、周知の方法で求めた2次元スキャナのスキャン原点(または、基準点)を示すスキャナ原点信号が得られた時点からの経過時間をカウントすることで走査ミラー12の時間位置を示す位置信号を生成してLD制御回路31−4に出力する。LD制御回路31−4は、例えばシステム制御回路31内の記憶部に格納された図12(b)に示す如きパワータイムテーブルT4を参照し、走査ミラー12の時間位置t1,...,tnに基づいて光出射パワー(相対値)を読み出す。LD制御回路31−4は、読み出した光出射パワーを示す駆動回路設定信号をLD駆動回路32−1に出力し、LD10の光出射パワーを制御する。これにより、LD駆動回路32−1は、駆動回路設定信号で設定された光出射パワーのレーザビームを、検出信号で示されたレーザ出射タイミングで出射するための駆動電流をLD10に出力する。尚、走査ミラー12の時間位置から走査ミラー12の角度位置を求めることができるので、時間カウンタ33−3が走査ミラー12の角度位置を示す位置信号を出力する場合には、パワータイムテーブルT4の代わりに上記パワー設定テーブルT3を用いるようにしても良い。
【0042】
図12(b)のパワータイムテーブルT4は、水平走査範囲21が180度、垂直走査範囲22が140度、投光角拡大レンズ13の倍率が5倍、投光角度が5×(ミラー角度×2)である場合の光出射パワーを示す。この場合、水平方向の投光角度Ahは−90度≦Ah≦90度、水平方向のミラー角度Mh−9度≦Mh≦9度である。また、垂直方向の投光角度Avは−70度≦Av≦70度、垂直方向のミラー角度Mv−7度≦Mv≦7度である。
【0043】
投光角度は走査ミラー12の角度で決まるので、時間カウンタ33−3を設け、LD制御回路31−4において位置信号に基づいてパワータイムテーブルT4を参照しながらLD10の光出射パワーの設定を繰り返し、LD10によるレーザビームの出射を行う。これにより、投光領域23内で同じ測定対象物が投光角拡大レンズ13から同じ距離に位置する場合、測定対象物が互いに異なる角度位置に存在しても、PD15からは同じ受光振幅を得ることができ、位置測定精度を向上することができる。
【0044】
このように、投光方向(または、受光角度)による受光感度の変化(広角側ほど感度が低下しやすい)、および単位面積当たりの投光レーザパワーの変動(広角側のレーザビームの形状は広がりやすいか、あるいは、強度が低下しやすい)を補正するため、走査ミラー12の角度(即ち、投光角度)に依存する時間位置に基づいてパワータイムテーブルT4を参照する。パワータイムテーブルT4から読み出した光出射パワーに基づいてLD10の駆動電流を可変制御することで、LD10から出射されるレーザビームの光出射パワーを適切に補正してPD15からは同じ受光振幅が得られるようにすることが可能となる。
【0045】
(第4実施例)
次に、投光レーザパワーの補正を行う第4実施例について、図13と共に説明する。本実施例における光学系の構成は、上記第1実施例の場合と同様で良い。又、制御系の構成は、図8及び図11に示す第2実施例および第3実施例の場合と同様で良い。図13は、第4実施例の動作を説明する図である。
【0046】
本実施例では、上記第2実施例および上記第3実施例を組み合わせる。図13において、(a)はLD10の投光レーザパワー(任意単位)と投光角度の関係を示し、(b)はPD15の受光感度(任意単位)と投光角度の関係を示す。図13(a),(b)からもわかるように、投光角度が大きくなり±90度に近づくと、投光レーザパワーおよび受光感度が低下する。そこで、本実施例の距離測定装置1では、図13(c)のような光出射パワー(任意単位)と投光角度の補正データを用いて、同じ距離の測定対象物から戻ってくるレーザビームをPD15で検出した受光振幅(任意単位)が図13(e)に示すように一定となるように、LD10の光出射パワーを投光角に応じて補正すると共に、図13(d)のようなゲイン(任意単位)と投光角度の補正データを用いて、同じ距離の測定対象物から戻ってくるレーザビームをPD15で検出してアンプ回路34−1で増幅した後の受光振幅(任意単位)が図13(e)に示すように一定となるように補正する。
【0047】
これにより、投光領域23内で同じ測定対象物が投光角拡大レンズ13から同じ距離に位置する場合、測定対象物が互いに異なる角度位置に存在しても、PD15からは同じ受光振幅を得ることができると共に、アンプ回路34−1からは同じ受光振幅を得ることができ、位置測定精度を向上することができる。
【0048】
尚、図8(a)の制御系および図11(a)の制御系を組み合わせた場合、ミラー位置検出回路33−1を共用できるので、回路構成を簡略化することができる。同様に、図8(b)の制御系および図11(b)の制御系を組み合わせた場合、時間カウンタ33−3を共用できるので、回路構成を簡略化することができる。言うまでもなく、図8(a)および図11(b)に示す制御系を組み合わせても良く、図8(b)および図11(a)に示す制御系を組み合わせても良い。
【0049】
以上の実施例を含む実施形態に関し、さらに以下の付記を開示する。
(付記1)
2次元スキャナおよび投光角拡大レンズを含み、投光ビームを前方に投光する投光系と、
前記投光系のビーム走査角度と同等以上の受光視野角を有すると共に、受光に関する第1の光路が前記投光角拡大レンズの投光に関する第2の光路と独立しており、前記投光角拡大レンズより前方、且つ、前記投光ビームの投光領域より後方に配置された受光レンズを含む受光系とを備えたことを特徴とする、距離測定装置。
(付記2)
前記投光系のビーム走査角度は、水平方向と垂直方向で検出角度範囲が異なることを特徴とする、付記1記載の距離測定装置。
(付記3)
前記投光系のビーム走査角度は、水平方向の検出角度範囲が垂直方向の検出角度範囲より広いことを特徴とする、付記1記載の距離測定装置。
(付記4)
前記受光レンズで受光したビームを検出する受光部と、
前記受光部の検出信号を増幅する増幅回路と、
前記投光角拡大レンズの投光角度に応じて前記増幅回路の利得を制御する制御回路
を更に備えたことを特徴とする、付記2または3記載の距離測定装置。
(付記5)
前記制御回路は、前記投光角度に対する利得が予め格納されたテーブルを用いて前記増幅回路の利得を制御することを特徴とする、付記4記載の距離測定装置。
(付記6)
前記2次元スキャナ内の走査ミラーのミラー角度を検出して角度位置を示す位置信号を出力する検出回路
を更に備え、
前記制御回路は、前記位置信号に基づいて前記投光角度に対する利得を前記テーブルから読み出すことを特徴とする、付記5記載の距離測定装置。
(付記7)
前記制御回路は、スキャン原点からスキャン終点までの時間に対する利得が予め格納されたテーブルを用いて前記増幅回路の利得を制御することを特徴とする、付記4記載の距離測定装置。
(付記8)
前記スキャン原点から前記スキャン終点までの時間をカウントして前記2次元スキャナ内の走査ミラーの時間位置を示す位置信号を出力するカウンタ
を更に備え、
前記制御回路は、前記位置信号に基づいて前記走査ミラーの時間位置に対する利得を前記テーブルから読み出すことを特徴とする、付記7記載の距離測定装置。
(付記9)
光ビームを出射する光源と、
前記投光角拡大レンズの投光角度に応じて前記光源の光出射パワーを制御する制御回路
を更に備えたことを特徴とする、付記2乃至8のいずれか1項記載の距離測定装置。
(付記10)
前記制御回路は、前記投光角度に対する光出射パワーが予め格納されたテーブルを用いて前記光源の光出射パワーを制御することを特徴とする、付記9記載の距離測定装置。
(付記11)
前記2次元スキャナ内の走査ミラーのミラー角度を検出して角度位置を示す位置信号を出力する検出回路
を更に備え、
前記制御回路は、前記位置信号に基づいて前記投光角度に対する光出射パワーを前記テーブルから読み出すことを特徴とする、付記10記載の距離測定装置。
(付記12)
前記制御回路は、スキャン原点からスキャン終点までの時間に対する光出射パワーが予め格納されたテーブルを用いて前記光源の光出射パワーを制御することを特徴とする、付記9記載の距離測定装置。
(付記13)
前記スキャン原点から前記スキャン終点までの時間をカウントして前記2次元スキャナ内の走査ミラーの時間位置を示す位置信号を出力するカウンタ
を更に備え、
前記制御回路は、前記位置信号に基づいて前記走査ミラーの時間位置に対する光出射パワーを前記テーブルから読み出すことを特徴とする、付記12記載の距離測定装置。
(付記14)
前記投光系及び前記受光系を収納する筐体
を更に備え、
前記受光レンズは前記投光角拡大レンズより前記筐体の上方、且つ、前記筐体の後方に配置されていることを特徴とする、付記2乃至13のいずれか1項記載の距離測定装置。
【0050】
以上、開示の距離測定装置を実施例により説明したが、本発明は上記実施例に限定されるものではなく、本発明の範囲内で種々の変形および改良が可能であることは言うまでもない。
【符号の説明】
【0051】
1 距離測定装置
10 LD
12 走査ミラー
13 投光角拡大レンズ
14 受光レンズ
15 PD
31 システム制御回路
32 LD制御回路
33 ミラー制御回路
34 PD信号処理回路
【特許請求の範囲】
【請求項1】
2次元スキャナおよび投光角拡大レンズを含み、投光ビームを前方に投光する投光系と、
前記投光系のビーム走査角度と同等以上の受光視野角を有すると共に、受光に関する第1の光路が前記投光角拡大レンズの投光に関する第2の光路と独立しており、前記投光角拡大レンズより前方、且つ、前記投光ビームの投光領域より後方に配置された受光レンズを含む受光系とを備えたことを特徴とする、距離測定装置。
【請求項2】
前記投光系のビーム走査角度は、水平方向と垂直方向で検出角度範囲が異なることを特徴とする、請求項1記載の距離測定装置。
【請求項3】
前記受光レンズで受光したビームを検出する受光部と、
前記受光部の検出信号を増幅する増幅回路と、
前記投光角拡大レンズの投光角度に応じて前記増幅回路の利得を制御する制御回路
を更に備えたことを特徴とする、請求項2記載の距離測定装置。
【請求項4】
光ビームを出射する光源と、
前記投光角拡大レンズの投光角度に応じて前記光源の光出射パワーを制御する制御回路
を更に備えたことを特徴とする、請求項2又は3の距離測定装置。
【請求項5】
前記投光系及び前記受光系を収納する筐体
を更に備え、
前記受光レンズは前記投光角拡大レンズより前記筐体の上方、且つ、前記筐体の後方に配置されていることを特徴とする、請求項2乃至4のいずれか1項記載の距離測定装置。
【請求項1】
2次元スキャナおよび投光角拡大レンズを含み、投光ビームを前方に投光する投光系と、
前記投光系のビーム走査角度と同等以上の受光視野角を有すると共に、受光に関する第1の光路が前記投光角拡大レンズの投光に関する第2の光路と独立しており、前記投光角拡大レンズより前方、且つ、前記投光ビームの投光領域より後方に配置された受光レンズを含む受光系とを備えたことを特徴とする、距離測定装置。
【請求項2】
前記投光系のビーム走査角度は、水平方向と垂直方向で検出角度範囲が異なることを特徴とする、請求項1記載の距離測定装置。
【請求項3】
前記受光レンズで受光したビームを検出する受光部と、
前記受光部の検出信号を増幅する増幅回路と、
前記投光角拡大レンズの投光角度に応じて前記増幅回路の利得を制御する制御回路
を更に備えたことを特徴とする、請求項2記載の距離測定装置。
【請求項4】
光ビームを出射する光源と、
前記投光角拡大レンズの投光角度に応じて前記光源の光出射パワーを制御する制御回路
を更に備えたことを特徴とする、請求項2又は3の距離測定装置。
【請求項5】
前記投光系及び前記受光系を収納する筐体
を更に備え、
前記受光レンズは前記投光角拡大レンズより前記筐体の上方、且つ、前記筐体の後方に配置されていることを特徴とする、請求項2乃至4のいずれか1項記載の距離測定装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−113684(P2013−113684A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−259441(P2011−259441)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]