
跨座型モノレール軌道転てつ装置
【課題】跨座型モノレール軌道の転てつ装置の小型化を図る。
【解決手段】第1の転てつ装置100は、第1の転てつ桁側に装備される主軸110と、主軸110に対して取付けられるアーム120等を介して偏心位置に回転自在に取付けられる円筒ローラ130を有する。主軸110の中心と円筒ローラ130の中心との間の距離をL1とする。主軸110を平面上で矢印R1方向(時計廻り方向)に駆動する。アーム120の回転角度が90度となると、図3の(c)に示すように、主軸110は、初期位置(中心線CL)から距離L1だけ横方向に移動する。この位置が、第1の転てつ桁を角度θだけ回動させる位置に合わせることにより、第1の転てつ桁の転てつは完了する。
【解決手段】第1の転てつ装置100は、第1の転てつ桁側に装備される主軸110と、主軸110に対して取付けられるアーム120等を介して偏心位置に回転自在に取付けられる円筒ローラ130を有する。主軸110の中心と円筒ローラ130の中心との間の距離をL1とする。主軸110を平面上で矢印R1方向(時計廻り方向)に駆動する。アーム120の回転角度が90度となると、図3の(c)に示すように、主軸110は、初期位置(中心線CL)から距離L1だけ横方向に移動する。この位置が、第1の転てつ桁を角度θだけ回動させる位置に合わせることにより、第1の転てつ桁の転てつは完了する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、跨座型モノレールの軌道の転てつ装置に関するものである。
【背景技術】
【0002】
転てつ機はモノレールの走行する桁の方向をモノレールの走行方向に合わせて変更する装置である。
例えば特許文献1のモノレール転てつ機は、電動機を動力源として減速機を回転させ、出力軸に取り付けた回転アームを回転させる。回転アームの両端には円筒ローラを設置している。回転アームの回転によりにより円筒ローラに掛合している溝付きガイドを押し引きして転てつ桁を転てつさせる。転てつ終了時には別に設けた位置検知スイッチにより電磁ブレーキが作動して電動機の回転を止めることにより減速機及び出力軸に取付けた回転アームの回転が止まり転てつ桁の転てつを終了させる。しかし電動機は電磁ブレーキ作動までの空走時間及びブレーキ力等により停止位置にばらつきが生じていた。
このブレーキ力等による停止位置のばらつきは減速機出力軸に取付けた回転アームの停止位置のばらつきを生じさせる。
【0003】
前記特許文献1を例として説明すると、転てつ桁が本明細書の図1に示す如く直線状態(N線の位置)にあり、左側又は右側のL線またはR線の隣接桁まで転てつするに際して、転てつ間隔の長い箇所では、溝付きガイドの中心を転てつ間隔の1/2の位置に設置し、回転アームの円筒ローラ中心までの長さを転てつ間隔の1/2にし掛合させて回転アームを180度回転させると転てつ桁は左側又は右側隣接桁まで転てつし、回転アームは溝付きガイドと直角に停止できる。これを直角停止という。
【0004】
しかし、転てつ桁の始端側の転てつ桁11のように転てつ間隔が短い箇所では、回転アームの回転中心と円筒ローラの回転中心との間隔も小さくなり、寸法的制約から、溝付きガイドを転てつ間隔の1/2の位置に設置することは出来ず、転てつ間隔が小さい個所では停止できなかった。
【特許文献1】特公平3−3762号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
前記構成によれば、転てつ間隔が小さい個所では転てつができなかった。
【0006】
本発明の目的は小間隔で転てつ桁を転てつできるようにする装置を提供することにある。
【課題を解決するための手段】
【0007】
上記目的は、跨座型モノレールの単線側固定軌道と分岐固定軌道の間に配設される転てつ装置において、単線側固定軌道に連結される転てつ桁は、前記単線側固定側の一端部を水平回動自在に支持する手段と、他端部を水平旋回動自在に支持する手段と、転てつ装置を備え、前記転てつ装置は、基礎側に固定される単線側固定軌道の中心線に一致する中心線を有する第2の溝付きガイドと、該第2の溝付きガイドの両側に設置された第1の溝付きガイドと、前記転てつ桁側に装備される主軸と、該主軸によって水平旋回されるアームと、該アームの両端に設置され、前記第1の溝付きガイドに係合するた第1の円筒ローラと、前記主軸に対して偏心して前記アームに取付けられ、前記第2の溝付きガイドに係合する第2の円筒ローラと、を備えること、によって、達成できる。
【発明の効果】
【0008】
本発明によれば、主軸を90度回転させることにより、転てつ桁を所定の旋回角度に転てつすることができる。
【発明を実施するための最良の形態】
【0009】
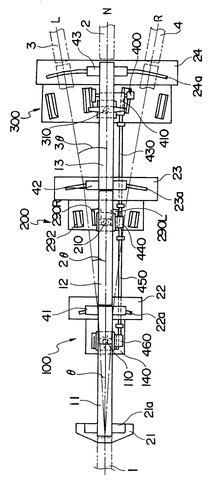
図1において跨座型モノレール軌道の転てつ装置は、単線側固定軌道1と3本に分岐した固定軌道2,3,4の間で跨座型モノレール軌道の転てつを行う。
【0010】
本装置にあっては、単線側固定軌道1と3線分岐固定軌道2,3,4の間に3本の転てつ桁11,12,13が配設される。転てつ桁の本数は分岐する軌道の本数及び単線固定軌道1と分岐固定軌道2,3,4との距離に応じて適宜に選択される。
【0011】
3本の転てつ桁11,12,13を支持するために、4基の基礎21,22,23,24が設けられる。
【0012】
単線側固定軌道1に接続される第1の転てつ桁11の単線側固定軌道1側の端部下面は、台車11aにより支持される。台車11aは第1の基礎21上に対して水平旋回動自在に支持される。
【0013】
第1の転てつ桁11の他端部11bは、第2の転てつ桁12の一方の端部12a上に重ねられ、両者の間にはT型ピン31が配設される。このT型ピン31は、転てつ桁11,12の端部を互に水平旋回動及び垂直方向に回動自在に支持される。
【0014】
第2の転てつ桁12の第1の転てつ桁11側の端部12aの下部には台車41が取付けられる。この台車41は、第2の基礎22上のレール22aに対して転動自在に支持される。
【0015】
第2の転てつ桁12の他端部12c上には、第3の転てつ桁13の一方の端部13aが重ねられ、両者の間に設けられるT型ピン32により連結され、両者は水平旋回動及び垂直方向に回動自在に支持される。
【0016】
第2の転てつ桁12の第3の転てつ桁13側の端部12cの下部には台車42が設けられ、第3の基礎23上のレール23a上に対して転動自在に支持される。
【0017】
第3の転てつ桁13の分岐固定軌道2,3,4側の端部の下部には台車43が設けられ、第4の基礎24上のレール24aに対して転動自在に支持される。
【0018】
図1において、転てつ桁11,12,13が分岐固定軌道2から分岐軌道3に転てつされる際には、単線固定軌道1と分岐固定軌道3とを接続するように、転てつ桁11、12,13は角度θだけ旋回する。
【0019】
すなわち、3台の台車41,42,43は、それぞれ異なる距離の旋回運動を行う。
この旋回運動を達成するために、本発明の跨座型モノレール軌道の転てつ装置にあっては、3基の転てつ装置100,200,300が装備される。
【0020】
第1の転てつ桁11を角度θだけ旋回動させる第1の転てつ装置100は、旋回動距離が小さいので、第2の転てつ装置200、第3の転てつ装置300とは異なる機構が採用されている。
【0021】
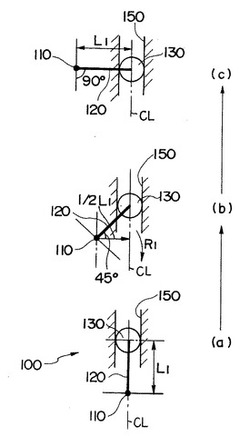
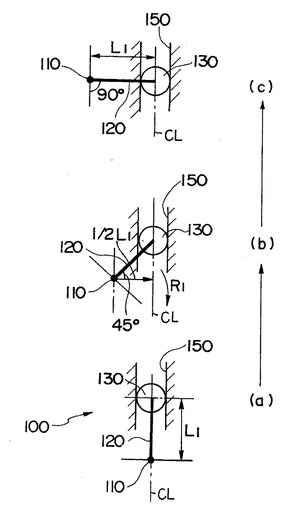
図3は、第1の転てつ装置100の作動原理を示す説明図である。
【0022】
第1の転てつ装置100は、第1の転てつ桁11側に装備され、後述する駆動機構により回転駆動される主軸110と、主軸110に対して取付けられるアーム120等を介して偏心位置に回転自在に取付けられる円筒ローラ130を有する。主軸110の中心と円筒ローラ130の中心との間の距離をL1とする。
【0023】
そして、この円筒ローラ130は、図1,図2に示すベース140上に固定される溝付きガイド150内に挿入される。溝付きガイド150は垂直方向上方に向けて溝がある。
【0024】
図3の(a)は、第1の転てつ桁11が単線側固定軌道1の中心線Nと同一の中心軸線CL上に置かれた図1の実線位置にあるときを示す。
【0025】
この位置から第1の転てつ桁11を分岐側固定軌道3に向けて転てつさせる操作を説明する。
【0026】
図3の(b)に示すように、主軸110を平面上で円筒ローラ130を中心として矢印R1方向(時計廻り方向)に駆動する。円筒ローラ130は、溝付きガイド150内に拘束されているので、第1の転てつ桁11に固定された主軸110は、初期位置から平面上で左側へ移動する。矢印R1方向への回転角度が45度に達すると、この移動量は距離L1の半分となる。
【0027】
アーム120の回転角度が90度となると、図3の(c)に示すように、主軸110は、初期位置(中心線CL)から距離L1だけ横方向に移動する。この位置が、第1の転てつ桁11の転てつは完了する。
【0028】
主軸110の回転方向を逆にすることにより、第1の転てつ桁11を逆方向に回動させることができる。
【0029】
主軸110を駆動する電動モータの電動機の停止制御にはインバータ制御で停止時に周波数変換で回転数を下げて停止精度を向上させる等の方法もあるが、転てつ時間の増大及び制御の価格増大、保守点検増加、予備品の保有等の問題があり、簡易な方法で確実に停止制度を向上させる構造が必要であった。
【0030】
本発明では、安価な標準モータを使用し、回転停止位置の厳格な制御を要求しない。
【0031】
この場合に、図3の(c)の位置でのアーム120が中心線CLに対して直角な位置となる。この位置にあっては、主軸110の回転停止位置の誤差は主軸110の横方向の位置(転てつ桁の位置)には、大きな影響を与えない。この状態を直角停止と称する。アーム120が中心線CLに対して平行な常態で停止することを平行方向停止という。
【0032】
しかしながら、図3の(a)に示すアームが中心線CL上に一致する位置にあっては、主軸110の横方向の位置に大きな影響を与える。
【0033】
例えば、アーム120の長さをLアームの停止時の計画中心からの傾きをθとすると、アーム120が溝付きガイド150と直角停止でのズレ量はδ1=L−L×cosθ、アーム120が溝付きガイド150と平行方向停止の場合のズレ量はδ2=L×Sinθとなる。
【0034】
具体的には、L=500mm、θ=2度とすると、δ1=0.3mm、δ2=17.4mmとなり。並行方向停止のほうが、ズレ量が大きい。
【0035】
そこで、図3の(a)の状態でも直角停止を実現するために、実際には図4で示す機構が採用される。
【0036】
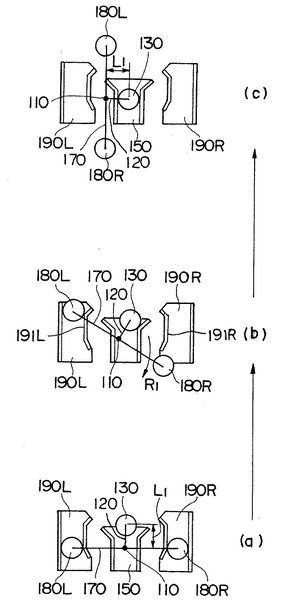
図4は、上述した作動原理を利用した第1の転てつ装置のより具体的な機構を示す。主軸110に対してアーム120を介して円筒ローラ130が設けられることは、先の実施例と同様である。主軸110に対して、アーム120と直交するアーム170が設けられ、アーム170の両端にローラ180L,180Rが取付けられる。ローラ180L,180Rは対応する溝付きガイド190L,190Rに係合する。溝付きガイド190L,190Rの溝は上方に向けて溝がある。
【0037】
アーム170に対して直交してアーム120があり、アーム120の先端には円筒ローラ130がある。アーム170とアーム120は一体であり、アーム120はアーム170の一部である。
【0038】
主軸110が時計廻り方向R1に駆動されると、図4の(b)に示すように、左側のローラ180Lは左側の溝付きガイド190Lの内側の側面191Lに押圧され、主軸110とともに第1の転てつ桁11を左側へ移動させる。同時に、円筒ローラ130は中央の溝付きガイド150に係合し、主軸110が90度回動すると、第1の転てつ桁11は主軸110とともに距離L1だけ横方向に移動する。溝付きガイド150の溝の間隔は円筒ローラ130の径よりも大きい。溝付きガイド190L,190Rの溝の間隔は円筒ローラ180L,180Rの略同一である。つまり、円筒ローラ130,180L,180Rの径が同一であれば、円筒ローラ130,180L,180Rと溝付きガイド130,190L,190Rとの隙間は円筒ローラ130と溝付きガイド130との隙間のほうが大きい。
【0039】
溝付きガイド190L、190R、150は図4の上端側が拡大している。溝付きガイド190L,190Rはその内壁191L,191R側が内側に拡大している。溝付きガイド190L,190Rは図4において下端も内壁191L,191Rが内側に拡大している。
溝付きガイド150の下端は拡大していない。円筒ローラ180Lが溝付きガイド190Lの拡大部にいたるとき、円筒ローラ180Rは拡大部を抜け出している。このとき、円筒ローラ130は、溝付きガイド150の拡大部にある。
【0040】
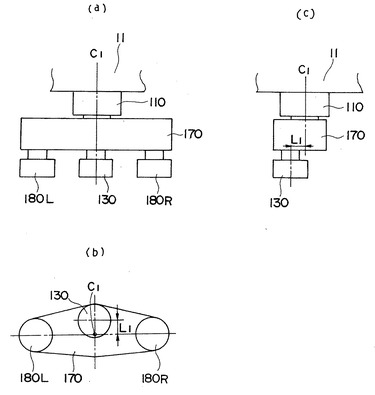
図5は、図4の実施例に使用されるアームの具体的な構成を示す。
【0041】
第1の転てつ桁11側に取付けられた主軸110は、後述する駆動装置により旋回駆動される。アーム170の両端には、1対円筒ーラ180L,180Rが取付けられる。アーム170の主軸110の回転中心C1から距離L1だけ離れた位置に円筒ローラ130が設けられる。アーム170の一方側の面には主軸110が設置されている。他方側の面に、円筒ローら180L、180R、130が設置されている。前記駆動装置とは、伝動装置460である。
【0042】
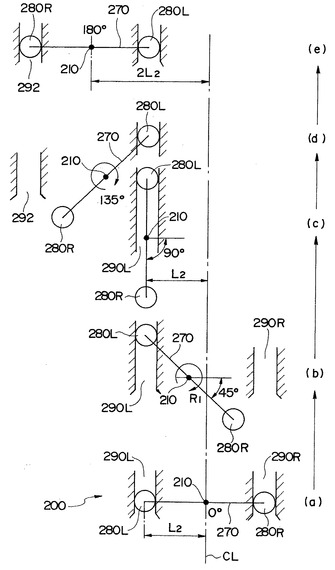
図6は、第2の転てつ桁12を移動させるための第2の転てつ装置200の作動を示す説明図である。
【0043】
第2の転てつ装置200は、第2の転てつ桁12を角度θだけ旋回させるようにアーム270の長さ寸法や溝付きガイドの設置位置等が設定される。
【0044】
第2の転てつ装置200は、主軸210と主軸210により旋回駆動されるアーム270と、アーム270の両端に取付けられる1対のローラ280L,280Rを有する。第1転てつ装置100の円筒ローラ130に相当するものはない。
【0045】
主軸210とローラ280Lとの間の軸間距離は寸法L2に設定される。ベース240上には、合計4本の溝付きガイド290が設置される。
【0046】
図6は、中央に設置される2本の溝付きガイド290L,290Rを示し、作動を説明する。
【0047】
図6の(a)は、図1に示す第2の転てつ桁21の状態を示す。
【0048】
アーム270に取付けたローラ280L,280Rは溝付きガイド290L,290Rに係合している。
【0049】
この状態では、主軸210の位置は単線固定軌道1と分岐軌道2を結ぶ中心線に一致する中心軸線CL上にある。この状態から主軸210を矢印R1で示す時計廻り方向に回転させると、右側のローラ280Rは右側の溝付きガイド290Rから外れ、左側のローラ280Lが溝付きガイド290Lにより案内される。この作用により、主軸210とともに、第2の転てつ桁12は、台車42とともに左側に向けて移動する。
【0050】
主軸210が90度回転すると、図6の(c)に示すように、主軸210の中心は中心線CLから距離L2だけ離れた位置に移動する。
【0051】
更に主軸210の回転を続けると、ローラ280Rが溝付きガイド290Lの外側に設置された溝付きガイド292に係合し、主軸210が180度回転した位置で転てつ作動は完了する。この停止状態は直角停止である。
【0052】
この状態では、図6の(e)に示すように、主軸210の中心位置は中心線CLから距離2L2離れた位置に移動する。この位置で、第2の転てつ桁12が角度2θ旋回するように、アーム270の長さ寸法と溝付きガイドの設置位置を設定する。
【0053】
第3の転てつ装置300も第2の転てつ装置200と同様の構成を備える。
【0054】
第3の転てつ装置300は、第3の転てつ桁13を角度θだけ旋回させるようにアームの長さ寸法や溝付きガイドの設置位置等が設定される。
【0055】
以上により、各転てつ装置200,300の転てつ角度は180度で、直角停止である。転てつ距離が小さい転てつ装置100では転てつ角度は90であるが、直角停止である。
【0056】
次に、図1、図2により、転てつ装置の駆動機構を説明する。
【0057】
動力源となるモータ400は、第3の転てつ装置300に設置される。モータ400の出力は、伝動装置410を介して第3の転てつ装置300の主軸ヘッド305に伝達され、主軸310を180度回転させる。伝動装置410は具体的には減速機である。減速機は主軸ヘッド305の主軸210を回転させ、主軸210を180℃回転させる。
【0058】
モータ400の出力は、シャフト430を介して第2の転てつ装置200側へ伝達され、伝動装置440(具体的には減速機)を介して第2の転てつ装置200の主軸ヘッド205に伝達され、主軸210を180度回転させる。
【0059】
第2の転てつ装置300は、第2の転てつ桁13を角度θだけ旋回させるようにアームの長さ寸法や溝付きガイドの設置位置等が設定される。
【0060】
モータの出力は、更にシャフト450を介して第1の転てつ装置100側へ伝達され、伝動装置460(具体的には減速機)を介して第1の転てつ装置100の主軸ヘッド105へ伝達され、主軸110を90度回転させる。
【0061】
したがって、第1の転てつ装置100の伝動装置460は、第2の転てつ装置200の伝動装置440が、第2の転てつ装置の主軸210を180度回転させる間に、第1の転てつ装置100の主軸110は90度だけ回転するので、これに対応する減速機構を備える。
【0062】
なお、各転てつ桁は互に折れ曲げられるので、シャフト間にフレキシブル継手421,422,423,424等が適宜に装備される。
【0063】
本発明によれば、第1の転てつ桁11を駆動する転てつ装置100は小さなスペースに設置することができる。
【図面の簡単な説明】
【0064】
【図1】本発明の転てつ装置の平面図。
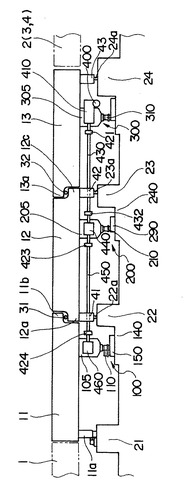
【図2】本発明の転てつ装置の側面図。
【図3】第1の転てつ装置の作動を示す説明図。
【図4】第1の転てつ装置の実施例を示す説明図。
【図5】第1の転てつ装置の実施例の主軸の説明図であり、(a)は主軸部分の側面図であり、(b)は(a)の底面図であり、(c)は(a)の右側面図である。
【図6】第2の転てつ装置の作動を示す説明図。
【符号の説明】
【0065】
1…単線側固定軌道、2、3、4…固定軌道、11…第1の転てつ桁、12…第2の転てつ桁、13…第3の転てつ桁、100…第1の転てつ装置、200…第2の転てつ装置、300…第3の転てつ装置
【技術分野】
【0001】
本発明は、跨座型モノレールの軌道の転てつ装置に関するものである。
【背景技術】
【0002】
転てつ機はモノレールの走行する桁の方向をモノレールの走行方向に合わせて変更する装置である。
例えば特許文献1のモノレール転てつ機は、電動機を動力源として減速機を回転させ、出力軸に取り付けた回転アームを回転させる。回転アームの両端には円筒ローラを設置している。回転アームの回転によりにより円筒ローラに掛合している溝付きガイドを押し引きして転てつ桁を転てつさせる。転てつ終了時には別に設けた位置検知スイッチにより電磁ブレーキが作動して電動機の回転を止めることにより減速機及び出力軸に取付けた回転アームの回転が止まり転てつ桁の転てつを終了させる。しかし電動機は電磁ブレーキ作動までの空走時間及びブレーキ力等により停止位置にばらつきが生じていた。
このブレーキ力等による停止位置のばらつきは減速機出力軸に取付けた回転アームの停止位置のばらつきを生じさせる。
【0003】
前記特許文献1を例として説明すると、転てつ桁が本明細書の図1に示す如く直線状態(N線の位置)にあり、左側又は右側のL線またはR線の隣接桁まで転てつするに際して、転てつ間隔の長い箇所では、溝付きガイドの中心を転てつ間隔の1/2の位置に設置し、回転アームの円筒ローラ中心までの長さを転てつ間隔の1/2にし掛合させて回転アームを180度回転させると転てつ桁は左側又は右側隣接桁まで転てつし、回転アームは溝付きガイドと直角に停止できる。これを直角停止という。
【0004】
しかし、転てつ桁の始端側の転てつ桁11のように転てつ間隔が短い箇所では、回転アームの回転中心と円筒ローラの回転中心との間隔も小さくなり、寸法的制約から、溝付きガイドを転てつ間隔の1/2の位置に設置することは出来ず、転てつ間隔が小さい個所では停止できなかった。
【特許文献1】特公平3−3762号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
前記構成によれば、転てつ間隔が小さい個所では転てつができなかった。
【0006】
本発明の目的は小間隔で転てつ桁を転てつできるようにする装置を提供することにある。
【課題を解決するための手段】
【0007】
上記目的は、跨座型モノレールの単線側固定軌道と分岐固定軌道の間に配設される転てつ装置において、単線側固定軌道に連結される転てつ桁は、前記単線側固定側の一端部を水平回動自在に支持する手段と、他端部を水平旋回動自在に支持する手段と、転てつ装置を備え、前記転てつ装置は、基礎側に固定される単線側固定軌道の中心線に一致する中心線を有する第2の溝付きガイドと、該第2の溝付きガイドの両側に設置された第1の溝付きガイドと、前記転てつ桁側に装備される主軸と、該主軸によって水平旋回されるアームと、該アームの両端に設置され、前記第1の溝付きガイドに係合するた第1の円筒ローラと、前記主軸に対して偏心して前記アームに取付けられ、前記第2の溝付きガイドに係合する第2の円筒ローラと、を備えること、によって、達成できる。
【発明の効果】
【0008】
本発明によれば、主軸を90度回転させることにより、転てつ桁を所定の旋回角度に転てつすることができる。
【発明を実施するための最良の形態】
【0009】
図1において跨座型モノレール軌道の転てつ装置は、単線側固定軌道1と3本に分岐した固定軌道2,3,4の間で跨座型モノレール軌道の転てつを行う。
【0010】
本装置にあっては、単線側固定軌道1と3線分岐固定軌道2,3,4の間に3本の転てつ桁11,12,13が配設される。転てつ桁の本数は分岐する軌道の本数及び単線固定軌道1と分岐固定軌道2,3,4との距離に応じて適宜に選択される。
【0011】
3本の転てつ桁11,12,13を支持するために、4基の基礎21,22,23,24が設けられる。
【0012】
単線側固定軌道1に接続される第1の転てつ桁11の単線側固定軌道1側の端部下面は、台車11aにより支持される。台車11aは第1の基礎21上に対して水平旋回動自在に支持される。
【0013】
第1の転てつ桁11の他端部11bは、第2の転てつ桁12の一方の端部12a上に重ねられ、両者の間にはT型ピン31が配設される。このT型ピン31は、転てつ桁11,12の端部を互に水平旋回動及び垂直方向に回動自在に支持される。
【0014】
第2の転てつ桁12の第1の転てつ桁11側の端部12aの下部には台車41が取付けられる。この台車41は、第2の基礎22上のレール22aに対して転動自在に支持される。
【0015】
第2の転てつ桁12の他端部12c上には、第3の転てつ桁13の一方の端部13aが重ねられ、両者の間に設けられるT型ピン32により連結され、両者は水平旋回動及び垂直方向に回動自在に支持される。
【0016】
第2の転てつ桁12の第3の転てつ桁13側の端部12cの下部には台車42が設けられ、第3の基礎23上のレール23a上に対して転動自在に支持される。
【0017】
第3の転てつ桁13の分岐固定軌道2,3,4側の端部の下部には台車43が設けられ、第4の基礎24上のレール24aに対して転動自在に支持される。
【0018】
図1において、転てつ桁11,12,13が分岐固定軌道2から分岐軌道3に転てつされる際には、単線固定軌道1と分岐固定軌道3とを接続するように、転てつ桁11、12,13は角度θだけ旋回する。
【0019】
すなわち、3台の台車41,42,43は、それぞれ異なる距離の旋回運動を行う。
この旋回運動を達成するために、本発明の跨座型モノレール軌道の転てつ装置にあっては、3基の転てつ装置100,200,300が装備される。
【0020】
第1の転てつ桁11を角度θだけ旋回動させる第1の転てつ装置100は、旋回動距離が小さいので、第2の転てつ装置200、第3の転てつ装置300とは異なる機構が採用されている。
【0021】
図3は、第1の転てつ装置100の作動原理を示す説明図である。
【0022】
第1の転てつ装置100は、第1の転てつ桁11側に装備され、後述する駆動機構により回転駆動される主軸110と、主軸110に対して取付けられるアーム120等を介して偏心位置に回転自在に取付けられる円筒ローラ130を有する。主軸110の中心と円筒ローラ130の中心との間の距離をL1とする。
【0023】
そして、この円筒ローラ130は、図1,図2に示すベース140上に固定される溝付きガイド150内に挿入される。溝付きガイド150は垂直方向上方に向けて溝がある。
【0024】
図3の(a)は、第1の転てつ桁11が単線側固定軌道1の中心線Nと同一の中心軸線CL上に置かれた図1の実線位置にあるときを示す。
【0025】
この位置から第1の転てつ桁11を分岐側固定軌道3に向けて転てつさせる操作を説明する。
【0026】
図3の(b)に示すように、主軸110を平面上で円筒ローラ130を中心として矢印R1方向(時計廻り方向)に駆動する。円筒ローラ130は、溝付きガイド150内に拘束されているので、第1の転てつ桁11に固定された主軸110は、初期位置から平面上で左側へ移動する。矢印R1方向への回転角度が45度に達すると、この移動量は距離L1の半分となる。
【0027】
アーム120の回転角度が90度となると、図3の(c)に示すように、主軸110は、初期位置(中心線CL)から距離L1だけ横方向に移動する。この位置が、第1の転てつ桁11の転てつは完了する。
【0028】
主軸110の回転方向を逆にすることにより、第1の転てつ桁11を逆方向に回動させることができる。
【0029】
主軸110を駆動する電動モータの電動機の停止制御にはインバータ制御で停止時に周波数変換で回転数を下げて停止精度を向上させる等の方法もあるが、転てつ時間の増大及び制御の価格増大、保守点検増加、予備品の保有等の問題があり、簡易な方法で確実に停止制度を向上させる構造が必要であった。
【0030】
本発明では、安価な標準モータを使用し、回転停止位置の厳格な制御を要求しない。
【0031】
この場合に、図3の(c)の位置でのアーム120が中心線CLに対して直角な位置となる。この位置にあっては、主軸110の回転停止位置の誤差は主軸110の横方向の位置(転てつ桁の位置)には、大きな影響を与えない。この状態を直角停止と称する。アーム120が中心線CLに対して平行な常態で停止することを平行方向停止という。
【0032】
しかしながら、図3の(a)に示すアームが中心線CL上に一致する位置にあっては、主軸110の横方向の位置に大きな影響を与える。
【0033】
例えば、アーム120の長さをLアームの停止時の計画中心からの傾きをθとすると、アーム120が溝付きガイド150と直角停止でのズレ量はδ1=L−L×cosθ、アーム120が溝付きガイド150と平行方向停止の場合のズレ量はδ2=L×Sinθとなる。
【0034】
具体的には、L=500mm、θ=2度とすると、δ1=0.3mm、δ2=17.4mmとなり。並行方向停止のほうが、ズレ量が大きい。
【0035】
そこで、図3の(a)の状態でも直角停止を実現するために、実際には図4で示す機構が採用される。
【0036】
図4は、上述した作動原理を利用した第1の転てつ装置のより具体的な機構を示す。主軸110に対してアーム120を介して円筒ローラ130が設けられることは、先の実施例と同様である。主軸110に対して、アーム120と直交するアーム170が設けられ、アーム170の両端にローラ180L,180Rが取付けられる。ローラ180L,180Rは対応する溝付きガイド190L,190Rに係合する。溝付きガイド190L,190Rの溝は上方に向けて溝がある。
【0037】
アーム170に対して直交してアーム120があり、アーム120の先端には円筒ローラ130がある。アーム170とアーム120は一体であり、アーム120はアーム170の一部である。
【0038】
主軸110が時計廻り方向R1に駆動されると、図4の(b)に示すように、左側のローラ180Lは左側の溝付きガイド190Lの内側の側面191Lに押圧され、主軸110とともに第1の転てつ桁11を左側へ移動させる。同時に、円筒ローラ130は中央の溝付きガイド150に係合し、主軸110が90度回動すると、第1の転てつ桁11は主軸110とともに距離L1だけ横方向に移動する。溝付きガイド150の溝の間隔は円筒ローラ130の径よりも大きい。溝付きガイド190L,190Rの溝の間隔は円筒ローラ180L,180Rの略同一である。つまり、円筒ローラ130,180L,180Rの径が同一であれば、円筒ローラ130,180L,180Rと溝付きガイド130,190L,190Rとの隙間は円筒ローラ130と溝付きガイド130との隙間のほうが大きい。
【0039】
溝付きガイド190L、190R、150は図4の上端側が拡大している。溝付きガイド190L,190Rはその内壁191L,191R側が内側に拡大している。溝付きガイド190L,190Rは図4において下端も内壁191L,191Rが内側に拡大している。
溝付きガイド150の下端は拡大していない。円筒ローラ180Lが溝付きガイド190Lの拡大部にいたるとき、円筒ローラ180Rは拡大部を抜け出している。このとき、円筒ローラ130は、溝付きガイド150の拡大部にある。
【0040】
図5は、図4の実施例に使用されるアームの具体的な構成を示す。
【0041】
第1の転てつ桁11側に取付けられた主軸110は、後述する駆動装置により旋回駆動される。アーム170の両端には、1対円筒ーラ180L,180Rが取付けられる。アーム170の主軸110の回転中心C1から距離L1だけ離れた位置に円筒ローラ130が設けられる。アーム170の一方側の面には主軸110が設置されている。他方側の面に、円筒ローら180L、180R、130が設置されている。前記駆動装置とは、伝動装置460である。
【0042】
図6は、第2の転てつ桁12を移動させるための第2の転てつ装置200の作動を示す説明図である。
【0043】
第2の転てつ装置200は、第2の転てつ桁12を角度θだけ旋回させるようにアーム270の長さ寸法や溝付きガイドの設置位置等が設定される。
【0044】
第2の転てつ装置200は、主軸210と主軸210により旋回駆動されるアーム270と、アーム270の両端に取付けられる1対のローラ280L,280Rを有する。第1転てつ装置100の円筒ローラ130に相当するものはない。
【0045】
主軸210とローラ280Lとの間の軸間距離は寸法L2に設定される。ベース240上には、合計4本の溝付きガイド290が設置される。
【0046】
図6は、中央に設置される2本の溝付きガイド290L,290Rを示し、作動を説明する。
【0047】
図6の(a)は、図1に示す第2の転てつ桁21の状態を示す。
【0048】
アーム270に取付けたローラ280L,280Rは溝付きガイド290L,290Rに係合している。
【0049】
この状態では、主軸210の位置は単線固定軌道1と分岐軌道2を結ぶ中心線に一致する中心軸線CL上にある。この状態から主軸210を矢印R1で示す時計廻り方向に回転させると、右側のローラ280Rは右側の溝付きガイド290Rから外れ、左側のローラ280Lが溝付きガイド290Lにより案内される。この作用により、主軸210とともに、第2の転てつ桁12は、台車42とともに左側に向けて移動する。
【0050】
主軸210が90度回転すると、図6の(c)に示すように、主軸210の中心は中心線CLから距離L2だけ離れた位置に移動する。
【0051】
更に主軸210の回転を続けると、ローラ280Rが溝付きガイド290Lの外側に設置された溝付きガイド292に係合し、主軸210が180度回転した位置で転てつ作動は完了する。この停止状態は直角停止である。
【0052】
この状態では、図6の(e)に示すように、主軸210の中心位置は中心線CLから距離2L2離れた位置に移動する。この位置で、第2の転てつ桁12が角度2θ旋回するように、アーム270の長さ寸法と溝付きガイドの設置位置を設定する。
【0053】
第3の転てつ装置300も第2の転てつ装置200と同様の構成を備える。
【0054】
第3の転てつ装置300は、第3の転てつ桁13を角度θだけ旋回させるようにアームの長さ寸法や溝付きガイドの設置位置等が設定される。
【0055】
以上により、各転てつ装置200,300の転てつ角度は180度で、直角停止である。転てつ距離が小さい転てつ装置100では転てつ角度は90であるが、直角停止である。
【0056】
次に、図1、図2により、転てつ装置の駆動機構を説明する。
【0057】
動力源となるモータ400は、第3の転てつ装置300に設置される。モータ400の出力は、伝動装置410を介して第3の転てつ装置300の主軸ヘッド305に伝達され、主軸310を180度回転させる。伝動装置410は具体的には減速機である。減速機は主軸ヘッド305の主軸210を回転させ、主軸210を180℃回転させる。
【0058】
モータ400の出力は、シャフト430を介して第2の転てつ装置200側へ伝達され、伝動装置440(具体的には減速機)を介して第2の転てつ装置200の主軸ヘッド205に伝達され、主軸210を180度回転させる。
【0059】
第2の転てつ装置300は、第2の転てつ桁13を角度θだけ旋回させるようにアームの長さ寸法や溝付きガイドの設置位置等が設定される。
【0060】
モータの出力は、更にシャフト450を介して第1の転てつ装置100側へ伝達され、伝動装置460(具体的には減速機)を介して第1の転てつ装置100の主軸ヘッド105へ伝達され、主軸110を90度回転させる。
【0061】
したがって、第1の転てつ装置100の伝動装置460は、第2の転てつ装置200の伝動装置440が、第2の転てつ装置の主軸210を180度回転させる間に、第1の転てつ装置100の主軸110は90度だけ回転するので、これに対応する減速機構を備える。
【0062】
なお、各転てつ桁は互に折れ曲げられるので、シャフト間にフレキシブル継手421,422,423,424等が適宜に装備される。
【0063】
本発明によれば、第1の転てつ桁11を駆動する転てつ装置100は小さなスペースに設置することができる。
【図面の簡単な説明】
【0064】
【図1】本発明の転てつ装置の平面図。
【図2】本発明の転てつ装置の側面図。
【図3】第1の転てつ装置の作動を示す説明図。
【図4】第1の転てつ装置の実施例を示す説明図。
【図5】第1の転てつ装置の実施例の主軸の説明図であり、(a)は主軸部分の側面図であり、(b)は(a)の底面図であり、(c)は(a)の右側面図である。
【図6】第2の転てつ装置の作動を示す説明図。
【符号の説明】
【0065】
1…単線側固定軌道、2、3、4…固定軌道、11…第1の転てつ桁、12…第2の転てつ桁、13…第3の転てつ桁、100…第1の転てつ装置、200…第2の転てつ装置、300…第3の転てつ装置
【特許請求の範囲】
【請求項1】
跨座型モノレールの単線側固定軌道と分岐固定軌道の間に配設される転てつ装置において、単線側固定軌道に連結される転てつ桁は、前記単線側固定側の一端部を水平回動自在に支持する手段と、他端部を水平旋回動自在に支持する手段と、転てつ装置を備え、
前記転てつ装置は、基礎側に固定される単線側固定軌道の中心線に一致する中心線を有する第2の溝付きガイドと、該第2の溝付きガイドの両側に設置された第1の溝付きガイドと、前記転てつ桁側に装備される主軸と、該主軸によって水平旋回されるアームと、該アームの両端に設置され、前記第1の溝付きガイドに係合するた第1の円筒ローラと、前記主軸に対して偏心して前記アームに取付けられ、前記第2の溝付きガイドに係合する第2の円筒ローラと、を備えること、
を特徴とする跨座型モノレール軌道の転てつ装置。
【請求項2】
請求項1記載の跨座型モノレール軌道の転てつ装置において、
前記主軸に対して偏心して取付けられた前記第2の円筒ローラの偏心量は、前記主軸が90度回転したときに、前記中心線に対して前記転てつ桁は前記第2の円筒ローラに対して直角停止すること、
を特徴とする跨座型モノレール軌道の転てつ装置。
【請求項3】
請求項1の跨座型モノレール軌道の転てつ装置において、
前記第1の円筒ローラは前記主軸が180度回転したときに、前記第1の溝付きガイドに係合し、直角停止すること、
ことを特徴とする跨座型モノレール軌道の転てつ装置。
【請求項4】
請求項1記載の跨座型モノレール軌道の転てつ装置において、
前記アームの一方の面に前記主軸が設置されており、
前記アームの他方の面がわに前記台の円筒ローラ、および前記第2の円筒ローラが設置されていること、
を特徴とする跨座型モノレール軌道の転てつ装置。
【請求項5】
請求項1記載の跨座型モノレール軌道の転てつ装置において、
前記第2の溝付きガイドと前記第2の円筒ローラとの間には隙間があり、
前記第1の溝付きガイドと前期第1の円筒ローラとの間には隙間があること、
を特徴とする跨座型モノレール軌道の転てつ装置。
【請求項6】
請求項1記載の跨座型モノレール軌道の転てつ装置において、
前記分岐固定軌道と該分岐固定軌道に接続する第2の転てつ桁は、前記分岐固定軌道側端部を水平回動自在に支持する手段と、第2の転てつ装置を備え、
前記第2の転てつ装置は、前記第2の転てつ桁側に装備される第2の主軸と、該第2の主軸によって水平旋回する第2のアームと、該アームの両端に設置され、該アームが180度回転したとき、前記基礎側に装備された第3の溝付きガイドに係合する第3の円筒ローラと、前記基礎側に装備されており、前記アームがさらに180度回転したとき、前記基礎側に装備された前記第3の円筒ローラに係合する第4の溝付きガイドと、を備えること、
を特徴とする跨座型モノレール軌道の転てつ装置。
【請求項1】
跨座型モノレールの単線側固定軌道と分岐固定軌道の間に配設される転てつ装置において、単線側固定軌道に連結される転てつ桁は、前記単線側固定側の一端部を水平回動自在に支持する手段と、他端部を水平旋回動自在に支持する手段と、転てつ装置を備え、
前記転てつ装置は、基礎側に固定される単線側固定軌道の中心線に一致する中心線を有する第2の溝付きガイドと、該第2の溝付きガイドの両側に設置された第1の溝付きガイドと、前記転てつ桁側に装備される主軸と、該主軸によって水平旋回されるアームと、該アームの両端に設置され、前記第1の溝付きガイドに係合するた第1の円筒ローラと、前記主軸に対して偏心して前記アームに取付けられ、前記第2の溝付きガイドに係合する第2の円筒ローラと、を備えること、
を特徴とする跨座型モノレール軌道の転てつ装置。
【請求項2】
請求項1記載の跨座型モノレール軌道の転てつ装置において、
前記主軸に対して偏心して取付けられた前記第2の円筒ローラの偏心量は、前記主軸が90度回転したときに、前記中心線に対して前記転てつ桁は前記第2の円筒ローラに対して直角停止すること、
を特徴とする跨座型モノレール軌道の転てつ装置。
【請求項3】
請求項1の跨座型モノレール軌道の転てつ装置において、
前記第1の円筒ローラは前記主軸が180度回転したときに、前記第1の溝付きガイドに係合し、直角停止すること、
ことを特徴とする跨座型モノレール軌道の転てつ装置。
【請求項4】
請求項1記載の跨座型モノレール軌道の転てつ装置において、
前記アームの一方の面に前記主軸が設置されており、
前記アームの他方の面がわに前記台の円筒ローラ、および前記第2の円筒ローラが設置されていること、
を特徴とする跨座型モノレール軌道の転てつ装置。
【請求項5】
請求項1記載の跨座型モノレール軌道の転てつ装置において、
前記第2の溝付きガイドと前記第2の円筒ローラとの間には隙間があり、
前記第1の溝付きガイドと前期第1の円筒ローラとの間には隙間があること、
を特徴とする跨座型モノレール軌道の転てつ装置。
【請求項6】
請求項1記載の跨座型モノレール軌道の転てつ装置において、
前記分岐固定軌道と該分岐固定軌道に接続する第2の転てつ桁は、前記分岐固定軌道側端部を水平回動自在に支持する手段と、第2の転てつ装置を備え、
前記第2の転てつ装置は、前記第2の転てつ桁側に装備される第2の主軸と、該第2の主軸によって水平旋回する第2のアームと、該アームの両端に設置され、該アームが180度回転したとき、前記基礎側に装備された第3の溝付きガイドに係合する第3の円筒ローラと、前記基礎側に装備されており、前記アームがさらに180度回転したとき、前記基礎側に装備された前記第3の円筒ローラに係合する第4の溝付きガイドと、を備えること、
を特徴とする跨座型モノレール軌道の転てつ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2007−211558(P2007−211558A)
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願番号】特願2006−35511(P2006−35511)
【出願日】平成18年2月13日(2006.2.13)
【出願人】(000005108)株式会社日立製作所 (27,607)
【出願人】(390010973)日立交通テクノロジー株式会社 (20)
【Fターム(参考)】
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願日】平成18年2月13日(2006.2.13)
【出願人】(000005108)株式会社日立製作所 (27,607)
【出願人】(390010973)日立交通テクノロジー株式会社 (20)
【Fターム(参考)】
[ Back to top ]