
路側通信機及び位置精度推定方法
【課題】車載通信機から送信されて来る位置情報の精度の良否を、路側通信機側で把握できるようにする。
【解決手段】地上からGPS衛星までの距離は路側通信機と車載通信機との距離に比べて非常に長いため、GPS測位精度に関するGPS情報(捕捉数、DOP値等)に関して、車載通信機3と路側通信機2とは同じ条件であると解される。そこで、GPS衛星S1〜S5から送信される信号を路側通信機2が受信してGPS測位精度に関するGPS情報を取得し、取得したGPS情報に基づいて、車載通信機3のアップリンク信号に含まれる位置情報の精度を推定する。
【解決手段】地上からGPS衛星までの距離は路側通信機と車載通信機との距離に比べて非常に長いため、GPS測位精度に関するGPS情報(捕捉数、DOP値等)に関して、車載通信機3と路側通信機2とは同じ条件であると解される。そこで、GPS衛星S1〜S5から送信される信号を路側通信機2が受信してGPS測位精度に関するGPS情報を取得し、取得したGPS情報に基づいて、車載通信機3のアップリンク信号に含まれる位置情報の精度を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、高度道路交通システム(ITS:Intelligent Transport System)の構成要素として好適な路側通信機、及び、この路側通信機が車載通信機から取得する位置情報についての位置精度推定方法に関する。
【背景技術】
【0002】
近年、交通安全の促進や交通事故の防止を目的として、道路に設置されたインフラ装置からの情報を受信し、この情報を活用することで車両の安全性を向上させる高度道路交通システムが検討されている(例えば、特許文献1参照)。
かかる高度道路交通システムは、主として、インフラ側の無線通信装置である複数の路側通信機と、各車両に搭載される無線通信装置である複数の車載通信機とによって構成される。
【0003】
この場合、各通信主体間で行う通信の組み合わせには、路側通信機同士が行う路路間通信と、路側通信機と車載通信機とが行う路車(又は車路)間通信と、車載通信機同士が行う車車間通信とが含まれる。このように複数種類の通信が行われる通信システムでは、路側通信機と車載通信機とで送信タイミングを分けることにより互いの信号がぶつかることを防止している。また、路側通信機同士では互いに同じタイミングで送信するため、空間的に分離すべく、通信エリアがなるべく重ならないように工夫される。
【0004】
車載通信機は自己の位置情報等をブロードキャストで送信する機能を有しており、路側通信機はこの位置情報によって車両の存在とその位置を検出する。また、この位置情報に基づいて、路側通信機は車載通信機との通信エリアを把握(若しくは推定)することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第2806801号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記のような従来の路側通信機において、通信エリアを正確に把握するには、その基になる位置情報が正確でなければならない。しかしながら、現実には、位置情報の精度にばらつきがあって、精度が悪い場合もある。ところが、位置情報を受け取る側の路側通信機では、位置情報の精度の良否がわからないので、精度の悪い位置情報に基づいて誤差の多い位置検出をしてしまう場合がある。
【0007】
かかる従来の問題点に鑑み、本発明は、車載通信機から送信されて来る位置情報の精度の良否を、路側通信機側で把握できるようにすることを目的とする。
【課題を解決するための手段】
【0008】
(1)本発明は、車載通信機のアップリンク信号に含まれる位置情報に基づいて当該車載通信機の位置を検出する路側通信機であって、GPS衛星から送信される信号を受信してGPS測位精度に関するGPS情報を取得するGPS受信機と、取得したGPS情報に基づいて、前記位置情報の精度を推定する制御部とを備えたものである。
上記のように構成された路側通信機では、GPS測位精度に関するGPS情報に基づいて、アップリンク信号に含まれる位置情報の精度を推定する。これにより、車載通信機から送信されて来る位置情報の精度の良否を、路側通信機側で把握できる。
【0009】
(2)上記(1)の路側通信機において、GPS情報には、GPS衛星の捕捉数が含まれ得る。
この場合、捕捉数が閾値以上であるときのみの位置情報を採用することにより、位置情報の精度を高めることができる。
【0010】
(3)上記(1)の路側通信機において、GPS情報には、DOP値が含まれ得る。
この場合、DOP値が閾値以下であるときのみの位置情報を採用することにより、位置情報の精度を高めることができる。
【0011】
(4)上記(1)の路側通信機において、GPS情報には、GPS衛星からの信号受信強度及び信号対雑音比の少なくとも一方が含まれ得る。
この場合、信号受信強度が閾値以上、及び/又は、信号対雑音比が閾値以上であるときのみの位置情報を採用することにより、位置情報の精度を高めることができる。
【0012】
(5)上記(1)〜(4)のいずれかの路側通信機において、位置情報及び、推定した当該位置情報の精度に基づいて、アップリンク信号の受信可能な通信エリアを推定するようにしてもよい。
この場合、精度の高い位置情報のみに基づいて、通信エリアを、より正確に推定することができるようになる。
【0013】
(6)上記(1)〜(5)のいずれかの路側通信機において、路側通信機は、所定のダウンリンクエリアに対して車載通信機が受信可能なダウンリンク情報を送信する送信部を備えており、送信部は、位置情報及び推定した当該位置情報の精度に基づいて、当該路側通信機が無線で提供するダウンリンク情報の内容を決定するようにしてもよい。
この場合、位置情報の精度の良否に応じて適切な内容のダウンリンク情報を提供することができる。
【0014】
(7)上記(1)〜(6)のいずれかの路側通信機において、ダウンリンク情報には、車載通信機が車両の安全運転を支援するための安全運転支援情報を含めることができるように構成されており、送信部は、位置情報及び推定した当該位置情報の精度が所定レベル以上と判断された場合にのみ、ダウンリンク情報に安全運転支援情報を含めるようにしてもよい。
この場合、位置情報の精度が所定レベル以上である場合にのみ、安全運転支援情報を提供することができるので、精度が良くないのに高度な安全運転支援情報を提供して却って安全性を損なうこと等を、防止することができる。
【0015】
(8)一方、本発明は、車載通信機のアップリンク信号に含まれる位置情報の精度を推定する位置精度推定方法であって、GPS衛星から送信される信号を路側通信機が受信してGPS測位精度に関するGPS情報を取得し、取得したGPS情報に基づいて、前記位置情報の精度を推定することを特徴とするものである。
上記のような位置精度推定方法では、路側通信機が、GPS測位精度に関するGPS情報に基づいて、アップリンクに含まれる位置情報の精度を推定する。これにより、車載通信機から送信されて来る位置情報の精度の良否を、路側通信機側で把握できる。
【発明の効果】
【0016】
本発明の路側通信機/位置精度推定方法によれば、位置情報の精度の良否を、路側通信機側で把握できる。また、このような推定に基づいて位置情報の取捨選択をすれば、位置情報の精度を高めることができる。
【図面の簡単な説明】
【0017】
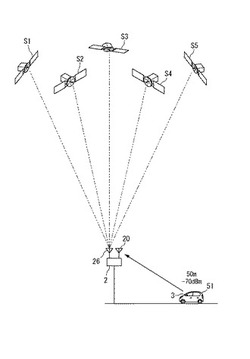
【図1】本発明の実施形態に係る路側通信機を含む高度道路交通システム(ITS)の全体構成を示す概略斜視図である。
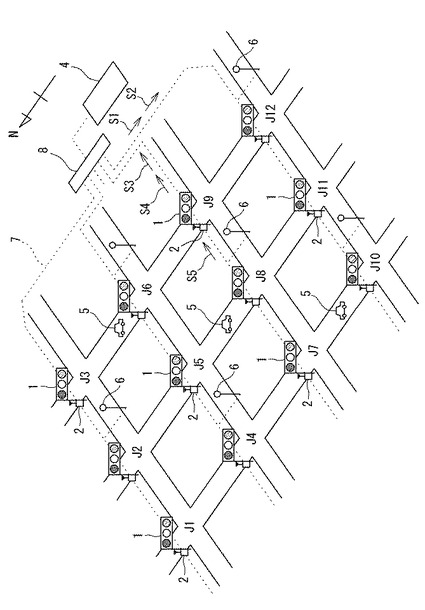
【図2】図1に示す高度道路交通システムの管轄エリアの一部を示す道路平面図である。
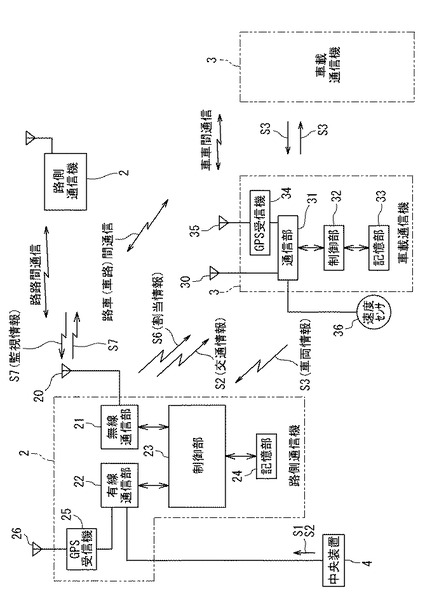
【図3】路側通信機と車載通信機の内部構成を示すブロック図である。
【図4】車載通信機が送信するデータフォーマットの一例を示す図である。
【図5】路側通信機から見た通信エリアを示す略図であり、(a)は路側通信機と、車載通信機を搭載した車両との位置関係を示している。(b)は、路側通信機から見た全通信エリアのうち、路上の一方向へ拡がる通信エリアの形状イメージを平面的に表した図である。
【図6】一例として、路側通信機が捕捉することができるGPS衛星を概念的に示す図である。
【図7】路側通信機による位置精度推定(第1実施形態)に関するフローチャートである。
【図8】路側通信機による位置精度推定(第2実施形態)に関するフローチャートである。
【図9】路側通信機による位置精度推定(第3実施形態)に関するフローチャートである。
【図10】図5に示す状態から通信エリアが変化した状態を示す図である。
【発明を実施するための形態】
【0018】
〔システムの全体構成〕
図1は、本発明の実施形態に係る路側通信機を含む高度道路交通システム(ITS)の全体構成を示す概略斜視図である。なお、本実施形態では、道路構造の一例として、南北方向と東西方向の複数の道路が互いに交差した碁盤目構造を想定している。
図1に示すように、本実施形態の高度道路交通システムは、交通信号機1、路側通信機2、車載通信機3(図2及び図3参照)、中央装置4、車載通信機3を搭載した車両5、及び、車両感知器や監視カメラ等よりなる路側センサ6を含む。
【0019】
交通信号機1と路側通信機2は、複数の交差点Ji(図例では、i=1〜12)のそれぞれに設置されており、電話回線等の通信回線7を介してルータ8に接続されている。このルータ8は交通管制センター内の中央装置4に接続されている。
中央装置4は、自身が管轄するエリアに含まれる各交差点Jiの交通信号機1及び路側通信機2とLAN(Local Area Network)を構成している。従って、中央装置4は、各交通信号機1及び各路側通信機2との間で双方向通信が可能である。なお、中央装置4は、交通管制センターではなく道路上に設置してもよい。
【0020】
路側センサ6は、各交差点Jiに流入する車両台数をカウントする等の目的で、管轄エリア内の道路の各所に設置されている。この路側センサ6は、直下を通行する車両5を超音波感知する車両感知器、或いは、道路の交通状況を時系列に撮影する監視カメラ等よりなり、感知情報S4や画像データS5は通信回線7を介して中央装置4に送信される。
なお、図1及び図2では、図示を簡略化するために、各交差点Jiに信号灯器が1つだけ描写されているが、実際の各交差点Jiには、互いに交差する道路の上り下り用として少なくとも4つの信号灯器が設置されている。
【0021】
〔中央装置〕
中央装置4は、ワークステーション(WS)やパーソナルコンピュータ(PC)等よりなる制御部を有しており、この制御部は、路側通信機2、路側センサ6からの各種の交通情報の収集・処理(演算)・記録、信号制御及び情報提供を統括的に行う。
具体的には、中央装置4の制御部は、自身のネットワークに属する交差点Ciの交通信号機1に対して、同一道路上の交通信号機1群を調整する系統制御や、この系統制御を道路網に拡張した広域制御(面制御)を行うことができる。
【0022】
また、中央装置4は、通信回線7を介してLAN側と接続された通信インタフェースである通信部を有しており、この通信部は、信号灯器の灯色切り替えタイミングに関する信号制御指令S1や、渋滞情報等を含む交通情報S2を所定時間ごとに交通信号機1及び路側通信機2に送信している(図1参照)。
信号制御指令S1は、前記系統制御や広域制御を行う場合の信号制御パラメータの演算周期(例えば、1.0〜2.5分)ごとに送信され、交通情報S2は、例えば5分ごとに送信される。
【0023】
また、中央装置4の通信部は、各交差点Jiに対応する路側通信機2から、その通信機2が車載通信機3から受信した車両5の現在位置等を含む車両情報S3、車両通過時に生じるパルス信号よりなる車両感知器(図示せず)の感知情報S4、及び、監視カメラが撮影した道路のデジタル情報よりなる画像データS5等を受信しており、中央装置4の制御部は、これらの各種情報に基づいて前記系統制御や広域制御を実行する。
【0024】
〔無線通信の方式等〕
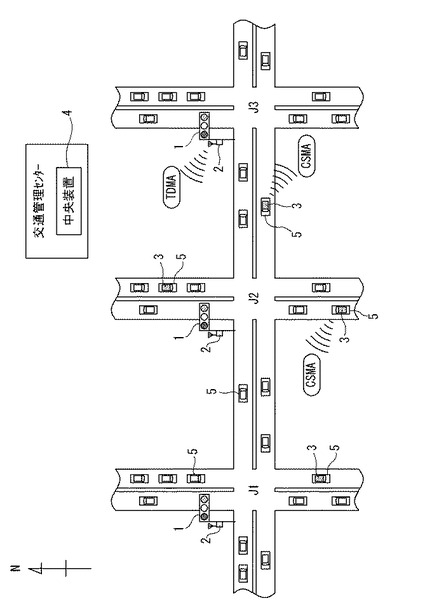
図2は、上記高度道路交通システムの管轄エリアの一部を示す道路平面図である。
図2では、互いに交差する2つの道路の各々が上りと下りで片側1車線のものとして例示されているが、道路構造はこれに限られるものではない。
図2にも示すように、本実施形態の高度道路交通システムは、車載通信機3との間で無線通信が可能な複数の路側通信機2と、キャリアセンス方式で他の通信機2,3と無線通信を行う移動無線送受信機の一種である車載通信機3と備えている。
【0025】
複数の路側通信機2は、それぞれ路側の交差点Jiごとに設置されていて、図1及び図2の例では交通信号機1の支柱に取り付けられている。一方、車載通信機3は、道路を走行する各車両5にそれぞれ搭載されている。
各路側通信機2は、その周囲に広がる通信エリア(路側通信機2の送信信号が十分に届く範囲)をそれぞれ有し、自身の通信エリアを走行する車両5の車載通信機3との無線通信が可能である。また、各路側通信機2は、他の路側通信機2とも通信可能である。
【0026】
本実施形態の高度道路交通システムでは、路側通信機2同士(路路間通信)については無線通信が用いられ、また、路側通信機2と車載通信機3との間(「路」から「車」への路車間通信と「車」から「路」への車路間通信との双方を含む。)と車載通信機3同士(車車間通信)についても、無線通信が用いられている。
なお、前記した通り、交通管制センターに設けられた中央装置4は、各路側通信機2と有線での双方向通信が可能となっているが、これらの間も無線通信であってもよい。
【0027】
各路側通信機2は、自装置が無線送信するためのタイムスロットをTDMA方式で割り当てており、このタイムスロット以外の時間帯には無線送信を行わない。従って、路側通信機2用のタイムスロット以外の時間帯は、車載通信機3のためのCSMA方式による送信時間として開放されている。
また、路側通信機2は、自身の送信タイミングを制御するために他の路側通信機2との時刻同期機能を有している。この路側通信機2の時刻同期は、例えば、自身の時計をGPS時刻に合わせるGPS同期や、自身の時計を他の路側通信機2からの送信信号に合わせるエア同期等によって行われる。
【0028】
〔路側通信機〕
図3は、路側通信機2と車載通信機3の内部構成を示すブロック図である。
路側通信機2は、無線通信のためのアンテナ20が接続された無線通信部(送受信部)21と、中央装置4と双方向通信する有線通信部22と、それらの通信制御を行うCPU等よりなる制御部23と、制御部23に接続されたROMやRAM等の記憶装置よりなる記憶部24と、GPS受信機25とを備えている。記憶部24は、制御部23が実行する通信制御のためのプログラムや、各通信機2,3の通信機ID等を記憶している。
【0029】
路側通信機2の有線通信部22には、中央装置4の他に、GPS受信機25が接続されている。このGPS受信機25は、GPSアンテナ26により、複数のGPS衛星(図示せず。)からGPS信号を受信する。GPS受信機25は、電波の到達時間やGPS衛星の位置情報を取得してGPS測位を行うほか、GPS測位精度に関するGPS情報(例えば、GPS衛星の捕捉数、DOP(Dilution Of Precision)値、受信強度(RSSI)、信号対雑音比(S/N比))を取得することができる。
【0030】
制御部23は、有線通信部22が受信した中央装置4からの交通情報S2等を、記憶部24に一時的に記憶させ、無線通信部21を介して自己の通信エリアにブロードキャスト送信する。また、制御部23は、無線通信部21が受信した車両情報S3を、記憶部24に一時的に記憶させ、有線通信部22を介して中央装置4に転送する。
【0031】
また、制御部23は、記憶部24に記憶されたタイムスロットの割当情報S6を、無線通信部21を介して自己の通信エリアにブロードキャスト送信する。この割当情報S6は、路側通信機2の送信時間を車載通信機3に通知するためのものである。通信エリアを走行する車両5の車載通信機3は、路側通信機2が送信を行わない時間帯に、キャリアセンス方式による無線送信を行う。
【0032】
〔車載通信機〕
一方、車載通信機3は、無線通信のためのアンテナ30に接続された通信部(送受信部)31と、この通信部31に対する通信制御を行うCPU等よりなる制御部32と、この制御部32に接続されたROMやRAM等の記憶装置よりなる記憶部33と、通信部31に接続されたGPS受信機34とを備えている。記憶部33は、制御部32が実行する通信制御のためのプログラムや、各通信機2,3の通信機ID等を記憶している。GPS受信機34は、GPSアンテナ35により、複数のGPS衛星(図示せず。)からGPS信号を受信する。また、通信部31には、速度センサ36が接続されている。
【0033】
車載通信機3の制御部32は、車車間通信のためのキャリアセンス方式による無線通信を通信部31に行わせるものであり、路側通信機2との間の時分割多重方式での通信制御機能は有していない。
従って、車載通信機3の通信部31は、所定の搬送波周波数の受信レベルを常時感知しており、その値がある閾値以上である場合は無線送信を行わず、当該閾値未満になった場合にのみ無線送信を行うようになっている。
【0034】
なお、車載通信機3の制御部32は、車両5(車載通信機3)の現時点の位置、方向、速度、車種等を含む車両情報S3を、通信部31を介して外部にブロードキャストで無線送信させている。
また、車載通信機3の制御部32は、他の車両5から直接受信した車両情報S3や、路側通信機2から受信した他の車両5の車両情報S3に含まれる、位置、速度及び方向に基づいて、右直衝突や出合い頭衝突等を回避するための安全運転支援制御を行うことができる。
【0035】
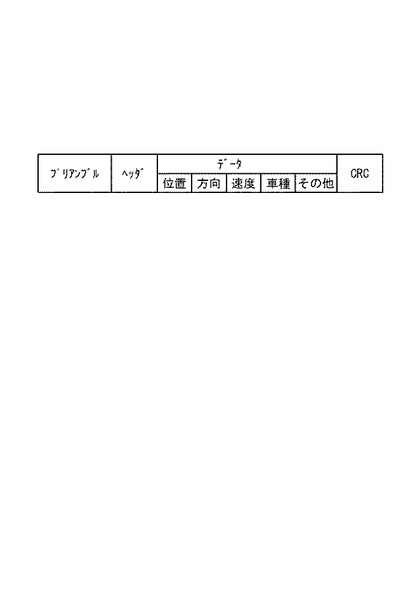
図4は、車載通信機3が送信するデータフォーマットの一例を示す図である。
図4に示すように、車載通信機3の送信信号には、プリアンブル、ヘッダ、データ、CRC(Cyclic Redundancy Check)が含まれている。
このうち、データには、車両5の位置、方向(進行方向)、速度、車種が含まれるが、路側通信機2からの送信信号を受信した場合の受信レベルを含めることもできる。車両5の位置や方向の情報は、GPS受信機34により、取得することができる。また、速度は、車両5の速度センサ36に基づいた情報である。
【0036】
〔路側通信機による位置精度推定:第1実施形態〕
次に、本発明の主要部分としての、第1実施形態に係る路側通信機による位置精度推定について説明する。
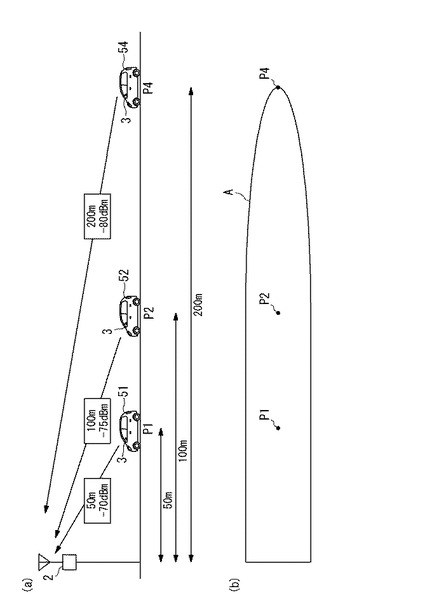
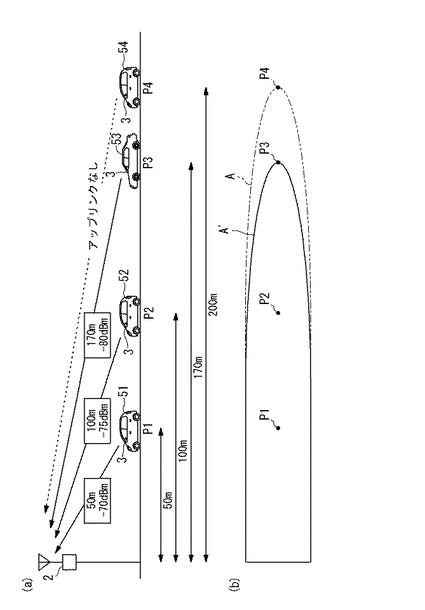
図5は、路側通信機2から見た通信エリアを示す略図であり、(a)は路側通信機2と、車載通信機3を搭載した車両51,52,54との位置関係を示している。(b)は、路側通信機2から見た全通信エリアのうち、路上の一方向へ拡がる通信エリAの形状イメージを平面的に表した図である。
【0037】
路側通信機2は、任意の車載通信機3がブロードキャストで送信するアップリンク信号(車両情報S3)を受信する。例えば、位置P4(距離200m)にある車両54の車載通信機3からの受信電力は−80dBmである。位置P1(路側通信機2からの距離50m)及びP2(距離100m)にそれぞれある車両51及び52の車載通信機3からの受信電力はそれぞれ、−70dBm及び−75dBmである。また、位置P4より遠方からのアップリンク信号は受信できない。すなわち、アップリンク信号が届く範囲であるアップリンクエリアは、図5の(b)におけるエリアAである。
【0038】
ここで、アップリンクエリアを正確に求めるためには、車載通信機3から送信されてくる位置情報が正確であることが重要である。そこで、GPS情報を用いて位置情報の精度を調べる。GPS衛星は、高度約20000kmの軌道を回っており、その個数は、24個を基本に、予備機を加えた約30個である。こららは、地球一周約12時間で周回する準同期衛星であり、従って、地球上の一点から捕捉できるGPS衛星の数や方位は時間とともに変化する。
【0039】
ここで、距離200m程度(すなわち衛星までの距離の10万分の1程度)の範囲内にある車載通信機3のGPS受信機34(図3)と、路側通信機2のGPS受信機25(図3)とでは、GPS測位精度に関するGPS情報(捕捉数、DOP値等)に関して、同じ条件であると解される。従って、路側通信機2のGPS受信機25(以下、単に路側通信機2という。)で得られるGPS情報に基づいて、車載通信機3の位置情報の精度を推定することができる。
【0040】
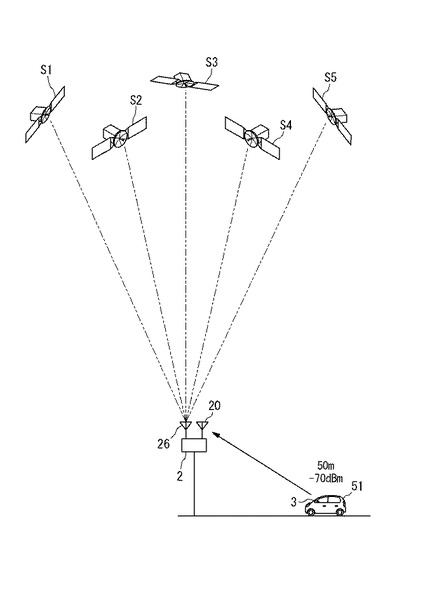
図6は、一例として、路側通信機2が捕捉することができるGPS衛星を概念的に示す図である。この状態では、路側通信機2は5機のGPS衛星S1〜S5を捕捉、すなわち、5機のGPS衛星S1〜S5から送信される信号を受信している。GPS測位は、3機のGPS衛星からそれぞれ送られてくる送信時刻と、受信時刻との差(到達時間)に光速を乗じて3つの距離を求め、これらの距離を、路側通信機2の位置(x,y,z)で表した3連立方程式を解くことにより、位置(x,y,z)を求めるものである。また、時刻の誤差修正のため、もう一つのGPS衛星についての方程式が必要であり、従って、最低でも4機のGPS衛星を捕捉することが必要である。また、さらに、4以上で、より多くのGPS衛星を捕捉することにより、位置精度を高めることができるので、例えば5又は6を、GPS衛星の捕捉数についての閾値とすることができる。
【0041】
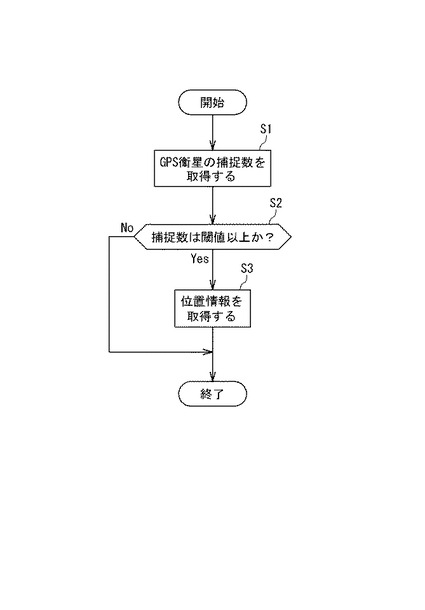
図7は、位置精度推定に関するフローチャートである。この処理は、路側通信機2の制御部(図3)において定期的に実行される。図において、路側通信機2は、まず、GPS衛星の捕捉数を取得する(ステップS1)。ここで、捕捉数が閾値以上であれば位置情報の精度が良好であると判断し(ステップS2)、車載通信機3からのアップリンク信号に含まれている位置情報を取得する(ステップS3)。なお、位置情報は、なるべく多数の車載通信機3から一定時間をかけて収集することが好ましい。
【0042】
一方、ステップS2において捕捉数が閾値に満たない場合には、路側通信機2は、良好な精度の位置情報が得られる保証がないと判断し、位置情報の取得を回避する。従って、GPS衛星の捕捉数が閾値に満たず、位置情報の精度が良くないと判断されるときは、路側通信機2は、車載通信機3から位置情報を取得しない。この結果、良好な精度の位置情報が得られる場合にのみ位置情報を取得することになり、車載通信機3に関して取得する位置の精度を高めることができる。
【0043】
こうして、精度の高い位置情報に基づいて、図5の(b)に示すアップリンクエリアを推定することができる。また、路側通信機2は、例えば自己が送信した情報の一部を車載通信機3に返信させるようにすれば、アップリンクエリアを、自己のダウンリンクエリアとしても確認し、双方からの通信が可能な通信エリアAとすることができる。
【0044】
〔路側通信機による位置精度推定:第2実施形態〕
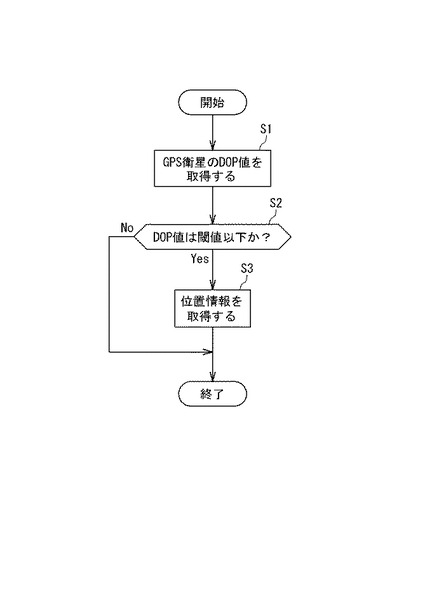
次に、第2実施形態に係る路側通信機による位置精度推定について説明する。図8は、この位置精度推定に関するフローチャートである。図7との違いは、GPS衛星の捕捉数ではなくDOP値を用いる点である。DOP値は、GPS測位精度に関するGPS情報の一つであり、捕捉できるGPS衛星とGPS受信機とを直線で結んで出来上がる多角錐の体積が大きいほどDOP値は小さく、GPS測位精度は良くなる。逆に、多角錐の体積が小さいほどDOP値は大きく、GPS測位精度は悪くなる。
【0045】
多角錐の体積が大きいという状態は、GPS受信機から見てGPS衛星が散らばった状態であり、逆に、多角錐の体積が小さいという状態は、GPS受信機から見てGPS衛星が一方位近傍に密集するように集まっている状態である。なお、詳細には、DOPには水平方向へのHDOP(Horizontal DOP)と、垂直方向へのVDOP(Vertical DOP)とがあるが、ここで言うDOPは、主としてHDOPである。
【0046】
図8は、DOP値に基づく位置精度推定に関するフローチャートである。この処理は、路側通信機2の制御部(図3)において定期的に実行される。図において、路側通信機2は、まず、GPS衛星のDOP値を取得する(ステップS1)。ここで、DOP値が閾値以下であれば位置情報の精度が良好であると判断し(ステップS2)、車載通信機3からのアップリンク信号に含まれている位置情報を取得する(ステップS3)。
【0047】
一方、ステップS2においてDOP値が閾値を超える場合には、路側通信機2は、良好な精度の位置情報が得られる保証がないと判断し、位置情報の取得を回避する。従って、GPS衛星のDOP値が閾値を超えて、位置情報の精度が良くないと判断されるときは、路側通信機2は、車載通信機3から位置情報を取得しない。この結果、良好な精度の位置情報が得られる場合にのみ位置情報を取得することになり、全体として、車載通信機3に関して取得する位置の精度を高めることができる。
【0048】
こうして、第1実施形態と同様に、精度の高い位置情報に基づいて、図5の(b)に示すアップリンクエリアを推定することができる。また、路側通信機2は、例えば自己が送信した情報の一部を車載通信機3に返信させるようにすれば、アップリンクエリアを、自己のダウンリンクエリアとして確認し、双方からの通信が可能な通信エリアAとすることができる。
【0049】
〔路側通信機による位置精度推定:第3実施形態〕
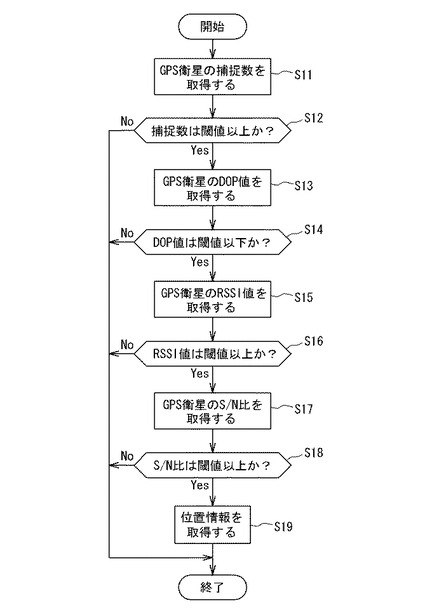
次に、第3実施形態に係る路側通信機による位置精度推定について説明する。図9は、この位置精度推定に関するフローチャートである。このフローチャートでは、第1実施形態におけるGPS衛星の捕捉数及び、第2実施形態におけるDOP値を共に、位置精度推定の要素としている。また、さらに、GPS衛星から送信される信号の受信強度を示すRSSI(Receive Signal Strength Indication)値及び、S/N比(信号対雑音比)を位置精度推定の要素としている。
【0050】
図において、路側通信機2は、まず、GPS衛星の捕捉数を取得し(ステップS11)、捕捉数は閾値以上か否かを判定する(ステップS12)。ここで、捕捉数が閾値以上であれば次にDOP値を取得する(ステップS13)。一方、ステップS12において捕捉数が閾値に満たない場合には、路側通信機2は、良好な精度の位置情報が得られる保証がないと判断し、位置情報の取得を回避する。
【0051】
次に、路側通信機2は、DOP値が閾値以下か否かを判定する(ステップS14)。ここで、DOP値が閾値以下であれば次にRSSI値を取得する(ステップS15)。一方、ステップS14においてDOP値が閾値を超えている場合には、路側通信機2は、良好な精度の位置情報が得られる保証がないと判断し、位置情報の取得を回避する。
【0052】
次に、路側通信機2は、全てのGPS衛星の信号受信に係るRSSI値が閾値以上か否かを判定する(ステップS16)。ここで、RSSI値が閾値以上であれば次にS/N比を取得する(ステップS17)。一方、ステップS16においてRSSI値が閾値に満たない場合には、路側通信機2は、受信強度が弱いため良好な精度の位置情報が得られる保証がないと判断し、位置情報の取得を回避する。
【0053】
次に、路側通信機2は、全てのGPS衛星の信号受信に係るS/N比が閾値以上か否かを判定する(ステップS18)。ここで、S/N比が閾値以上であれば、位置情報の精度が良好であると判断し、車載通信機3からのアップリンク信号に含まれている位置情報を取得する(ステップS19)。一方、ステップS18においてS/N比が閾値に満たない場合には、路側通信機2は、相対的に雑音が多いため良好な精度の位置情報が得られる保証がないと判断し、位置情報の取得を回避する。
【0054】
このようにして、GPS衛星の捕捉数、DOP値、RSSI値、S/N比の全てにおいて閾値条件をクリアした場合にのみ位置情報を取得し、1つでも閾値条件をクリアできなければ、路側通信機2は、車載通信機3から位置情報を取得しない。この結果、確実に良好な精度の位置情報が得られる場合にのみ位置情報を取得することになり、車載通信機3に関して取得する位置の精度を高めることができる。
また、第1,第2実施形態よりもさらに確実に精度の高い位置情報に基づいて、路側通信機2は、図5の(b)に示すアップリンクエリアを推定することができ、さらに、これを、自己のダウンリンクエリアとして確認し、双方からの通信が可能な通信エリアAとすることができる。
【0055】
なお、図9は一例であり、GPS衛星の捕捉数、DOP値、RSSI値、S/N比という4つのGPS情報を任意に組み合わせて、あるいは第1,第2実施形態のように単独で、位置情報の精度の良否推定に使用してもよいことは言うまでもない。
【0056】
〔その他〕
なお、上記各実施形態により位置情報を取捨選択して全体的に位置情報の精度を高めることによって、通信エリアAをより正確に推定することができる。例えば、電波の伝搬環境は、道路周辺の建造物の変化や、道路交通上のインフラの設置あるいは撤去、街路樹の落葉等、種々の条件で変化する。従って、通信エリアも例えば図10に示すように、AからA’へ変化する場合がある。すなわち、図示しているのは、アップリンク信号が届いて来る最遠端が200mから170mに変化した例である。この場合には、路側通信機2の送信電力を増大させることにより、元のエリアAに戻すことができる。逆に、エリアAが拡がった場合には、路側通信機2の送信電力を減少させることにより、元のエリアAに戻すことができる。
【0057】
また、位置情報の精度を高めることによって、路側通信機2は、アップリンク信号の位置情報と、その信号の受信強度とを対応させ、エリア内の位置と受信強度とをマッピングした分布図を取得することも可能である。
【0058】
〔その他の応用〕
上記のように、車両の位置情報は、アップリンクエリアの推定にも用いることができるが、安全運転支援のために利用することができ、車両に対して安全運転に資する情報の提供を行う場合の基礎的なデータとして活用することができる。
【0059】
例えば、高速で交差点に向けて直進してくる車両がいる場合、その車両が交差点に近づいていることを対面方向の右折車両に知らせれば、右直事故の防止に役立つ。この場合、交差点に進入するタイミングを精度よく予測するには、車載通信機が自己発信してくる位置精度が高い方が良い。
精度が不十分な位置情報に基づいて警告を与えようとすると、警告が不要な場面でドライバに警告をしてしまう可能性もあり、かえって安全性の低下を招くことがありうるからである。
【0060】
以上のように、車載通信機から発信される位置情報の精度を推定することができれば、その位置情報を利用した路側のサービスのレベル(例えば警告ではなく参考情報として提供するだけにする。)やサービスの実行の有無(情報提供をするかしないか)も判断することができるようになる。
【0061】
なお、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内での全ての変更が含まれることが意図される。
【符号の説明】
【0062】
2 路側通信機
3 車載通信機
23 制御部
25 GPS受信機
S1〜S5 GPS衛星
【技術分野】
【0001】
本発明は、例えば、高度道路交通システム(ITS:Intelligent Transport System)の構成要素として好適な路側通信機、及び、この路側通信機が車載通信機から取得する位置情報についての位置精度推定方法に関する。
【背景技術】
【0002】
近年、交通安全の促進や交通事故の防止を目的として、道路に設置されたインフラ装置からの情報を受信し、この情報を活用することで車両の安全性を向上させる高度道路交通システムが検討されている(例えば、特許文献1参照)。
かかる高度道路交通システムは、主として、インフラ側の無線通信装置である複数の路側通信機と、各車両に搭載される無線通信装置である複数の車載通信機とによって構成される。
【0003】
この場合、各通信主体間で行う通信の組み合わせには、路側通信機同士が行う路路間通信と、路側通信機と車載通信機とが行う路車(又は車路)間通信と、車載通信機同士が行う車車間通信とが含まれる。このように複数種類の通信が行われる通信システムでは、路側通信機と車載通信機とで送信タイミングを分けることにより互いの信号がぶつかることを防止している。また、路側通信機同士では互いに同じタイミングで送信するため、空間的に分離すべく、通信エリアがなるべく重ならないように工夫される。
【0004】
車載通信機は自己の位置情報等をブロードキャストで送信する機能を有しており、路側通信機はこの位置情報によって車両の存在とその位置を検出する。また、この位置情報に基づいて、路側通信機は車載通信機との通信エリアを把握(若しくは推定)することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第2806801号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記のような従来の路側通信機において、通信エリアを正確に把握するには、その基になる位置情報が正確でなければならない。しかしながら、現実には、位置情報の精度にばらつきがあって、精度が悪い場合もある。ところが、位置情報を受け取る側の路側通信機では、位置情報の精度の良否がわからないので、精度の悪い位置情報に基づいて誤差の多い位置検出をしてしまう場合がある。
【0007】
かかる従来の問題点に鑑み、本発明は、車載通信機から送信されて来る位置情報の精度の良否を、路側通信機側で把握できるようにすることを目的とする。
【課題を解決するための手段】
【0008】
(1)本発明は、車載通信機のアップリンク信号に含まれる位置情報に基づいて当該車載通信機の位置を検出する路側通信機であって、GPS衛星から送信される信号を受信してGPS測位精度に関するGPS情報を取得するGPS受信機と、取得したGPS情報に基づいて、前記位置情報の精度を推定する制御部とを備えたものである。
上記のように構成された路側通信機では、GPS測位精度に関するGPS情報に基づいて、アップリンク信号に含まれる位置情報の精度を推定する。これにより、車載通信機から送信されて来る位置情報の精度の良否を、路側通信機側で把握できる。
【0009】
(2)上記(1)の路側通信機において、GPS情報には、GPS衛星の捕捉数が含まれ得る。
この場合、捕捉数が閾値以上であるときのみの位置情報を採用することにより、位置情報の精度を高めることができる。
【0010】
(3)上記(1)の路側通信機において、GPS情報には、DOP値が含まれ得る。
この場合、DOP値が閾値以下であるときのみの位置情報を採用することにより、位置情報の精度を高めることができる。
【0011】
(4)上記(1)の路側通信機において、GPS情報には、GPS衛星からの信号受信強度及び信号対雑音比の少なくとも一方が含まれ得る。
この場合、信号受信強度が閾値以上、及び/又は、信号対雑音比が閾値以上であるときのみの位置情報を採用することにより、位置情報の精度を高めることができる。
【0012】
(5)上記(1)〜(4)のいずれかの路側通信機において、位置情報及び、推定した当該位置情報の精度に基づいて、アップリンク信号の受信可能な通信エリアを推定するようにしてもよい。
この場合、精度の高い位置情報のみに基づいて、通信エリアを、より正確に推定することができるようになる。
【0013】
(6)上記(1)〜(5)のいずれかの路側通信機において、路側通信機は、所定のダウンリンクエリアに対して車載通信機が受信可能なダウンリンク情報を送信する送信部を備えており、送信部は、位置情報及び推定した当該位置情報の精度に基づいて、当該路側通信機が無線で提供するダウンリンク情報の内容を決定するようにしてもよい。
この場合、位置情報の精度の良否に応じて適切な内容のダウンリンク情報を提供することができる。
【0014】
(7)上記(1)〜(6)のいずれかの路側通信機において、ダウンリンク情報には、車載通信機が車両の安全運転を支援するための安全運転支援情報を含めることができるように構成されており、送信部は、位置情報及び推定した当該位置情報の精度が所定レベル以上と判断された場合にのみ、ダウンリンク情報に安全運転支援情報を含めるようにしてもよい。
この場合、位置情報の精度が所定レベル以上である場合にのみ、安全運転支援情報を提供することができるので、精度が良くないのに高度な安全運転支援情報を提供して却って安全性を損なうこと等を、防止することができる。
【0015】
(8)一方、本発明は、車載通信機のアップリンク信号に含まれる位置情報の精度を推定する位置精度推定方法であって、GPS衛星から送信される信号を路側通信機が受信してGPS測位精度に関するGPS情報を取得し、取得したGPS情報に基づいて、前記位置情報の精度を推定することを特徴とするものである。
上記のような位置精度推定方法では、路側通信機が、GPS測位精度に関するGPS情報に基づいて、アップリンクに含まれる位置情報の精度を推定する。これにより、車載通信機から送信されて来る位置情報の精度の良否を、路側通信機側で把握できる。
【発明の効果】
【0016】
本発明の路側通信機/位置精度推定方法によれば、位置情報の精度の良否を、路側通信機側で把握できる。また、このような推定に基づいて位置情報の取捨選択をすれば、位置情報の精度を高めることができる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施形態に係る路側通信機を含む高度道路交通システム(ITS)の全体構成を示す概略斜視図である。
【図2】図1に示す高度道路交通システムの管轄エリアの一部を示す道路平面図である。
【図3】路側通信機と車載通信機の内部構成を示すブロック図である。
【図4】車載通信機が送信するデータフォーマットの一例を示す図である。
【図5】路側通信機から見た通信エリアを示す略図であり、(a)は路側通信機と、車載通信機を搭載した車両との位置関係を示している。(b)は、路側通信機から見た全通信エリアのうち、路上の一方向へ拡がる通信エリアの形状イメージを平面的に表した図である。
【図6】一例として、路側通信機が捕捉することができるGPS衛星を概念的に示す図である。
【図7】路側通信機による位置精度推定(第1実施形態)に関するフローチャートである。
【図8】路側通信機による位置精度推定(第2実施形態)に関するフローチャートである。
【図9】路側通信機による位置精度推定(第3実施形態)に関するフローチャートである。
【図10】図5に示す状態から通信エリアが変化した状態を示す図である。
【発明を実施するための形態】
【0018】
〔システムの全体構成〕
図1は、本発明の実施形態に係る路側通信機を含む高度道路交通システム(ITS)の全体構成を示す概略斜視図である。なお、本実施形態では、道路構造の一例として、南北方向と東西方向の複数の道路が互いに交差した碁盤目構造を想定している。
図1に示すように、本実施形態の高度道路交通システムは、交通信号機1、路側通信機2、車載通信機3(図2及び図3参照)、中央装置4、車載通信機3を搭載した車両5、及び、車両感知器や監視カメラ等よりなる路側センサ6を含む。
【0019】
交通信号機1と路側通信機2は、複数の交差点Ji(図例では、i=1〜12)のそれぞれに設置されており、電話回線等の通信回線7を介してルータ8に接続されている。このルータ8は交通管制センター内の中央装置4に接続されている。
中央装置4は、自身が管轄するエリアに含まれる各交差点Jiの交通信号機1及び路側通信機2とLAN(Local Area Network)を構成している。従って、中央装置4は、各交通信号機1及び各路側通信機2との間で双方向通信が可能である。なお、中央装置4は、交通管制センターではなく道路上に設置してもよい。
【0020】
路側センサ6は、各交差点Jiに流入する車両台数をカウントする等の目的で、管轄エリア内の道路の各所に設置されている。この路側センサ6は、直下を通行する車両5を超音波感知する車両感知器、或いは、道路の交通状況を時系列に撮影する監視カメラ等よりなり、感知情報S4や画像データS5は通信回線7を介して中央装置4に送信される。
なお、図1及び図2では、図示を簡略化するために、各交差点Jiに信号灯器が1つだけ描写されているが、実際の各交差点Jiには、互いに交差する道路の上り下り用として少なくとも4つの信号灯器が設置されている。
【0021】
〔中央装置〕
中央装置4は、ワークステーション(WS)やパーソナルコンピュータ(PC)等よりなる制御部を有しており、この制御部は、路側通信機2、路側センサ6からの各種の交通情報の収集・処理(演算)・記録、信号制御及び情報提供を統括的に行う。
具体的には、中央装置4の制御部は、自身のネットワークに属する交差点Ciの交通信号機1に対して、同一道路上の交通信号機1群を調整する系統制御や、この系統制御を道路網に拡張した広域制御(面制御)を行うことができる。
【0022】
また、中央装置4は、通信回線7を介してLAN側と接続された通信インタフェースである通信部を有しており、この通信部は、信号灯器の灯色切り替えタイミングに関する信号制御指令S1や、渋滞情報等を含む交通情報S2を所定時間ごとに交通信号機1及び路側通信機2に送信している(図1参照)。
信号制御指令S1は、前記系統制御や広域制御を行う場合の信号制御パラメータの演算周期(例えば、1.0〜2.5分)ごとに送信され、交通情報S2は、例えば5分ごとに送信される。
【0023】
また、中央装置4の通信部は、各交差点Jiに対応する路側通信機2から、その通信機2が車載通信機3から受信した車両5の現在位置等を含む車両情報S3、車両通過時に生じるパルス信号よりなる車両感知器(図示せず)の感知情報S4、及び、監視カメラが撮影した道路のデジタル情報よりなる画像データS5等を受信しており、中央装置4の制御部は、これらの各種情報に基づいて前記系統制御や広域制御を実行する。
【0024】
〔無線通信の方式等〕
図2は、上記高度道路交通システムの管轄エリアの一部を示す道路平面図である。
図2では、互いに交差する2つの道路の各々が上りと下りで片側1車線のものとして例示されているが、道路構造はこれに限られるものではない。
図2にも示すように、本実施形態の高度道路交通システムは、車載通信機3との間で無線通信が可能な複数の路側通信機2と、キャリアセンス方式で他の通信機2,3と無線通信を行う移動無線送受信機の一種である車載通信機3と備えている。
【0025】
複数の路側通信機2は、それぞれ路側の交差点Jiごとに設置されていて、図1及び図2の例では交通信号機1の支柱に取り付けられている。一方、車載通信機3は、道路を走行する各車両5にそれぞれ搭載されている。
各路側通信機2は、その周囲に広がる通信エリア(路側通信機2の送信信号が十分に届く範囲)をそれぞれ有し、自身の通信エリアを走行する車両5の車載通信機3との無線通信が可能である。また、各路側通信機2は、他の路側通信機2とも通信可能である。
【0026】
本実施形態の高度道路交通システムでは、路側通信機2同士(路路間通信)については無線通信が用いられ、また、路側通信機2と車載通信機3との間(「路」から「車」への路車間通信と「車」から「路」への車路間通信との双方を含む。)と車載通信機3同士(車車間通信)についても、無線通信が用いられている。
なお、前記した通り、交通管制センターに設けられた中央装置4は、各路側通信機2と有線での双方向通信が可能となっているが、これらの間も無線通信であってもよい。
【0027】
各路側通信機2は、自装置が無線送信するためのタイムスロットをTDMA方式で割り当てており、このタイムスロット以外の時間帯には無線送信を行わない。従って、路側通信機2用のタイムスロット以外の時間帯は、車載通信機3のためのCSMA方式による送信時間として開放されている。
また、路側通信機2は、自身の送信タイミングを制御するために他の路側通信機2との時刻同期機能を有している。この路側通信機2の時刻同期は、例えば、自身の時計をGPS時刻に合わせるGPS同期や、自身の時計を他の路側通信機2からの送信信号に合わせるエア同期等によって行われる。
【0028】
〔路側通信機〕
図3は、路側通信機2と車載通信機3の内部構成を示すブロック図である。
路側通信機2は、無線通信のためのアンテナ20が接続された無線通信部(送受信部)21と、中央装置4と双方向通信する有線通信部22と、それらの通信制御を行うCPU等よりなる制御部23と、制御部23に接続されたROMやRAM等の記憶装置よりなる記憶部24と、GPS受信機25とを備えている。記憶部24は、制御部23が実行する通信制御のためのプログラムや、各通信機2,3の通信機ID等を記憶している。
【0029】
路側通信機2の有線通信部22には、中央装置4の他に、GPS受信機25が接続されている。このGPS受信機25は、GPSアンテナ26により、複数のGPS衛星(図示せず。)からGPS信号を受信する。GPS受信機25は、電波の到達時間やGPS衛星の位置情報を取得してGPS測位を行うほか、GPS測位精度に関するGPS情報(例えば、GPS衛星の捕捉数、DOP(Dilution Of Precision)値、受信強度(RSSI)、信号対雑音比(S/N比))を取得することができる。
【0030】
制御部23は、有線通信部22が受信した中央装置4からの交通情報S2等を、記憶部24に一時的に記憶させ、無線通信部21を介して自己の通信エリアにブロードキャスト送信する。また、制御部23は、無線通信部21が受信した車両情報S3を、記憶部24に一時的に記憶させ、有線通信部22を介して中央装置4に転送する。
【0031】
また、制御部23は、記憶部24に記憶されたタイムスロットの割当情報S6を、無線通信部21を介して自己の通信エリアにブロードキャスト送信する。この割当情報S6は、路側通信機2の送信時間を車載通信機3に通知するためのものである。通信エリアを走行する車両5の車載通信機3は、路側通信機2が送信を行わない時間帯に、キャリアセンス方式による無線送信を行う。
【0032】
〔車載通信機〕
一方、車載通信機3は、無線通信のためのアンテナ30に接続された通信部(送受信部)31と、この通信部31に対する通信制御を行うCPU等よりなる制御部32と、この制御部32に接続されたROMやRAM等の記憶装置よりなる記憶部33と、通信部31に接続されたGPS受信機34とを備えている。記憶部33は、制御部32が実行する通信制御のためのプログラムや、各通信機2,3の通信機ID等を記憶している。GPS受信機34は、GPSアンテナ35により、複数のGPS衛星(図示せず。)からGPS信号を受信する。また、通信部31には、速度センサ36が接続されている。
【0033】
車載通信機3の制御部32は、車車間通信のためのキャリアセンス方式による無線通信を通信部31に行わせるものであり、路側通信機2との間の時分割多重方式での通信制御機能は有していない。
従って、車載通信機3の通信部31は、所定の搬送波周波数の受信レベルを常時感知しており、その値がある閾値以上である場合は無線送信を行わず、当該閾値未満になった場合にのみ無線送信を行うようになっている。
【0034】
なお、車載通信機3の制御部32は、車両5(車載通信機3)の現時点の位置、方向、速度、車種等を含む車両情報S3を、通信部31を介して外部にブロードキャストで無線送信させている。
また、車載通信機3の制御部32は、他の車両5から直接受信した車両情報S3や、路側通信機2から受信した他の車両5の車両情報S3に含まれる、位置、速度及び方向に基づいて、右直衝突や出合い頭衝突等を回避するための安全運転支援制御を行うことができる。
【0035】
図4は、車載通信機3が送信するデータフォーマットの一例を示す図である。
図4に示すように、車載通信機3の送信信号には、プリアンブル、ヘッダ、データ、CRC(Cyclic Redundancy Check)が含まれている。
このうち、データには、車両5の位置、方向(進行方向)、速度、車種が含まれるが、路側通信機2からの送信信号を受信した場合の受信レベルを含めることもできる。車両5の位置や方向の情報は、GPS受信機34により、取得することができる。また、速度は、車両5の速度センサ36に基づいた情報である。
【0036】
〔路側通信機による位置精度推定:第1実施形態〕
次に、本発明の主要部分としての、第1実施形態に係る路側通信機による位置精度推定について説明する。
図5は、路側通信機2から見た通信エリアを示す略図であり、(a)は路側通信機2と、車載通信機3を搭載した車両51,52,54との位置関係を示している。(b)は、路側通信機2から見た全通信エリアのうち、路上の一方向へ拡がる通信エリAの形状イメージを平面的に表した図である。
【0037】
路側通信機2は、任意の車載通信機3がブロードキャストで送信するアップリンク信号(車両情報S3)を受信する。例えば、位置P4(距離200m)にある車両54の車載通信機3からの受信電力は−80dBmである。位置P1(路側通信機2からの距離50m)及びP2(距離100m)にそれぞれある車両51及び52の車載通信機3からの受信電力はそれぞれ、−70dBm及び−75dBmである。また、位置P4より遠方からのアップリンク信号は受信できない。すなわち、アップリンク信号が届く範囲であるアップリンクエリアは、図5の(b)におけるエリアAである。
【0038】
ここで、アップリンクエリアを正確に求めるためには、車載通信機3から送信されてくる位置情報が正確であることが重要である。そこで、GPS情報を用いて位置情報の精度を調べる。GPS衛星は、高度約20000kmの軌道を回っており、その個数は、24個を基本に、予備機を加えた約30個である。こららは、地球一周約12時間で周回する準同期衛星であり、従って、地球上の一点から捕捉できるGPS衛星の数や方位は時間とともに変化する。
【0039】
ここで、距離200m程度(すなわち衛星までの距離の10万分の1程度)の範囲内にある車載通信機3のGPS受信機34(図3)と、路側通信機2のGPS受信機25(図3)とでは、GPS測位精度に関するGPS情報(捕捉数、DOP値等)に関して、同じ条件であると解される。従って、路側通信機2のGPS受信機25(以下、単に路側通信機2という。)で得られるGPS情報に基づいて、車載通信機3の位置情報の精度を推定することができる。
【0040】
図6は、一例として、路側通信機2が捕捉することができるGPS衛星を概念的に示す図である。この状態では、路側通信機2は5機のGPS衛星S1〜S5を捕捉、すなわち、5機のGPS衛星S1〜S5から送信される信号を受信している。GPS測位は、3機のGPS衛星からそれぞれ送られてくる送信時刻と、受信時刻との差(到達時間)に光速を乗じて3つの距離を求め、これらの距離を、路側通信機2の位置(x,y,z)で表した3連立方程式を解くことにより、位置(x,y,z)を求めるものである。また、時刻の誤差修正のため、もう一つのGPS衛星についての方程式が必要であり、従って、最低でも4機のGPS衛星を捕捉することが必要である。また、さらに、4以上で、より多くのGPS衛星を捕捉することにより、位置精度を高めることができるので、例えば5又は6を、GPS衛星の捕捉数についての閾値とすることができる。
【0041】
図7は、位置精度推定に関するフローチャートである。この処理は、路側通信機2の制御部(図3)において定期的に実行される。図において、路側通信機2は、まず、GPS衛星の捕捉数を取得する(ステップS1)。ここで、捕捉数が閾値以上であれば位置情報の精度が良好であると判断し(ステップS2)、車載通信機3からのアップリンク信号に含まれている位置情報を取得する(ステップS3)。なお、位置情報は、なるべく多数の車載通信機3から一定時間をかけて収集することが好ましい。
【0042】
一方、ステップS2において捕捉数が閾値に満たない場合には、路側通信機2は、良好な精度の位置情報が得られる保証がないと判断し、位置情報の取得を回避する。従って、GPS衛星の捕捉数が閾値に満たず、位置情報の精度が良くないと判断されるときは、路側通信機2は、車載通信機3から位置情報を取得しない。この結果、良好な精度の位置情報が得られる場合にのみ位置情報を取得することになり、車載通信機3に関して取得する位置の精度を高めることができる。
【0043】
こうして、精度の高い位置情報に基づいて、図5の(b)に示すアップリンクエリアを推定することができる。また、路側通信機2は、例えば自己が送信した情報の一部を車載通信機3に返信させるようにすれば、アップリンクエリアを、自己のダウンリンクエリアとしても確認し、双方からの通信が可能な通信エリアAとすることができる。
【0044】
〔路側通信機による位置精度推定:第2実施形態〕
次に、第2実施形態に係る路側通信機による位置精度推定について説明する。図8は、この位置精度推定に関するフローチャートである。図7との違いは、GPS衛星の捕捉数ではなくDOP値を用いる点である。DOP値は、GPS測位精度に関するGPS情報の一つであり、捕捉できるGPS衛星とGPS受信機とを直線で結んで出来上がる多角錐の体積が大きいほどDOP値は小さく、GPS測位精度は良くなる。逆に、多角錐の体積が小さいほどDOP値は大きく、GPS測位精度は悪くなる。
【0045】
多角錐の体積が大きいという状態は、GPS受信機から見てGPS衛星が散らばった状態であり、逆に、多角錐の体積が小さいという状態は、GPS受信機から見てGPS衛星が一方位近傍に密集するように集まっている状態である。なお、詳細には、DOPには水平方向へのHDOP(Horizontal DOP)と、垂直方向へのVDOP(Vertical DOP)とがあるが、ここで言うDOPは、主としてHDOPである。
【0046】
図8は、DOP値に基づく位置精度推定に関するフローチャートである。この処理は、路側通信機2の制御部(図3)において定期的に実行される。図において、路側通信機2は、まず、GPS衛星のDOP値を取得する(ステップS1)。ここで、DOP値が閾値以下であれば位置情報の精度が良好であると判断し(ステップS2)、車載通信機3からのアップリンク信号に含まれている位置情報を取得する(ステップS3)。
【0047】
一方、ステップS2においてDOP値が閾値を超える場合には、路側通信機2は、良好な精度の位置情報が得られる保証がないと判断し、位置情報の取得を回避する。従って、GPS衛星のDOP値が閾値を超えて、位置情報の精度が良くないと判断されるときは、路側通信機2は、車載通信機3から位置情報を取得しない。この結果、良好な精度の位置情報が得られる場合にのみ位置情報を取得することになり、全体として、車載通信機3に関して取得する位置の精度を高めることができる。
【0048】
こうして、第1実施形態と同様に、精度の高い位置情報に基づいて、図5の(b)に示すアップリンクエリアを推定することができる。また、路側通信機2は、例えば自己が送信した情報の一部を車載通信機3に返信させるようにすれば、アップリンクエリアを、自己のダウンリンクエリアとして確認し、双方からの通信が可能な通信エリアAとすることができる。
【0049】
〔路側通信機による位置精度推定:第3実施形態〕
次に、第3実施形態に係る路側通信機による位置精度推定について説明する。図9は、この位置精度推定に関するフローチャートである。このフローチャートでは、第1実施形態におけるGPS衛星の捕捉数及び、第2実施形態におけるDOP値を共に、位置精度推定の要素としている。また、さらに、GPS衛星から送信される信号の受信強度を示すRSSI(Receive Signal Strength Indication)値及び、S/N比(信号対雑音比)を位置精度推定の要素としている。
【0050】
図において、路側通信機2は、まず、GPS衛星の捕捉数を取得し(ステップS11)、捕捉数は閾値以上か否かを判定する(ステップS12)。ここで、捕捉数が閾値以上であれば次にDOP値を取得する(ステップS13)。一方、ステップS12において捕捉数が閾値に満たない場合には、路側通信機2は、良好な精度の位置情報が得られる保証がないと判断し、位置情報の取得を回避する。
【0051】
次に、路側通信機2は、DOP値が閾値以下か否かを判定する(ステップS14)。ここで、DOP値が閾値以下であれば次にRSSI値を取得する(ステップS15)。一方、ステップS14においてDOP値が閾値を超えている場合には、路側通信機2は、良好な精度の位置情報が得られる保証がないと判断し、位置情報の取得を回避する。
【0052】
次に、路側通信機2は、全てのGPS衛星の信号受信に係るRSSI値が閾値以上か否かを判定する(ステップS16)。ここで、RSSI値が閾値以上であれば次にS/N比を取得する(ステップS17)。一方、ステップS16においてRSSI値が閾値に満たない場合には、路側通信機2は、受信強度が弱いため良好な精度の位置情報が得られる保証がないと判断し、位置情報の取得を回避する。
【0053】
次に、路側通信機2は、全てのGPS衛星の信号受信に係るS/N比が閾値以上か否かを判定する(ステップS18)。ここで、S/N比が閾値以上であれば、位置情報の精度が良好であると判断し、車載通信機3からのアップリンク信号に含まれている位置情報を取得する(ステップS19)。一方、ステップS18においてS/N比が閾値に満たない場合には、路側通信機2は、相対的に雑音が多いため良好な精度の位置情報が得られる保証がないと判断し、位置情報の取得を回避する。
【0054】
このようにして、GPS衛星の捕捉数、DOP値、RSSI値、S/N比の全てにおいて閾値条件をクリアした場合にのみ位置情報を取得し、1つでも閾値条件をクリアできなければ、路側通信機2は、車載通信機3から位置情報を取得しない。この結果、確実に良好な精度の位置情報が得られる場合にのみ位置情報を取得することになり、車載通信機3に関して取得する位置の精度を高めることができる。
また、第1,第2実施形態よりもさらに確実に精度の高い位置情報に基づいて、路側通信機2は、図5の(b)に示すアップリンクエリアを推定することができ、さらに、これを、自己のダウンリンクエリアとして確認し、双方からの通信が可能な通信エリアAとすることができる。
【0055】
なお、図9は一例であり、GPS衛星の捕捉数、DOP値、RSSI値、S/N比という4つのGPS情報を任意に組み合わせて、あるいは第1,第2実施形態のように単独で、位置情報の精度の良否推定に使用してもよいことは言うまでもない。
【0056】
〔その他〕
なお、上記各実施形態により位置情報を取捨選択して全体的に位置情報の精度を高めることによって、通信エリアAをより正確に推定することができる。例えば、電波の伝搬環境は、道路周辺の建造物の変化や、道路交通上のインフラの設置あるいは撤去、街路樹の落葉等、種々の条件で変化する。従って、通信エリアも例えば図10に示すように、AからA’へ変化する場合がある。すなわち、図示しているのは、アップリンク信号が届いて来る最遠端が200mから170mに変化した例である。この場合には、路側通信機2の送信電力を増大させることにより、元のエリアAに戻すことができる。逆に、エリアAが拡がった場合には、路側通信機2の送信電力を減少させることにより、元のエリアAに戻すことができる。
【0057】
また、位置情報の精度を高めることによって、路側通信機2は、アップリンク信号の位置情報と、その信号の受信強度とを対応させ、エリア内の位置と受信強度とをマッピングした分布図を取得することも可能である。
【0058】
〔その他の応用〕
上記のように、車両の位置情報は、アップリンクエリアの推定にも用いることができるが、安全運転支援のために利用することができ、車両に対して安全運転に資する情報の提供を行う場合の基礎的なデータとして活用することができる。
【0059】
例えば、高速で交差点に向けて直進してくる車両がいる場合、その車両が交差点に近づいていることを対面方向の右折車両に知らせれば、右直事故の防止に役立つ。この場合、交差点に進入するタイミングを精度よく予測するには、車載通信機が自己発信してくる位置精度が高い方が良い。
精度が不十分な位置情報に基づいて警告を与えようとすると、警告が不要な場面でドライバに警告をしてしまう可能性もあり、かえって安全性の低下を招くことがありうるからである。
【0060】
以上のように、車載通信機から発信される位置情報の精度を推定することができれば、その位置情報を利用した路側のサービスのレベル(例えば警告ではなく参考情報として提供するだけにする。)やサービスの実行の有無(情報提供をするかしないか)も判断することができるようになる。
【0061】
なお、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内での全ての変更が含まれることが意図される。
【符号の説明】
【0062】
2 路側通信機
3 車載通信機
23 制御部
25 GPS受信機
S1〜S5 GPS衛星
【特許請求の範囲】
【請求項1】
車載通信機のアップリンク信号に含まれる位置情報に基づいて当該車載通信機の位置を検出する路側通信機であって、
GPS衛星から送信される信号を受信してGPS測位精度に関するGPS情報を取得するGPS受信機と、
取得したGPS情報に基づいて、前記位置情報の精度を推定する制御部と
を備えたことを特徴とする路側通信機。
【請求項2】
前記GPS情報には、GPS衛星の捕捉数が含まれる請求項1記載の路側通信機。
【請求項3】
前記GPS情報には、DOP値が含まれる請求項1記載の路側通信機。
【請求項4】
前記GPS情報には、前記GPS衛星からの信号受信強度及び信号対雑音比の少なくとも一方が含まれる請求項1記載の路側通信機。
【請求項5】
前記位置情報及び、推定した当該位置情報の精度に基づいて、前記アップリンク信号の受信可能な通信エリアを推定する請求項1〜4のいずれか1項に記載の路側通信機。
【請求項6】
前記路側通信機は、所定のダウンリンクエリアに対して前記車載通信機が受信可能なダウンリンク情報を送信する送信部を備えており、
前記送信部は、前記位置情報及び推定した当該位置情報の精度に基づいて、当該路側通信機が無線で提供するダウンリンク情報の内容を決定する請求項1〜5のいずれか1項に記載の路側通信機。
【請求項7】
前記ダウンリンク情報には、前記車載通信機が車両の安全運転を支援するための安全運転支援情報を含めることができるように構成されており、
前記送信部は、前記位置情報及び推定した当該位置情報の精度が所定レベル以上と判断された場合にのみ、前記ダウンリンク情報に前記安全運転支援情報を含める請求項1〜6のいずれか1項に記載の路側通信機。
【請求項8】
車載通信機のアップリンク信号に含まれる位置情報の精度を推定する位置精度推定方法であって、
GPS衛星から送信される信号を路側通信機が受信してGPS測位精度に関するGPS情報を取得し、
取得したGPS情報に基づいて、前記位置情報の精度を推定する
ことを特徴とする位置精度推定方法。
【請求項1】
車載通信機のアップリンク信号に含まれる位置情報に基づいて当該車載通信機の位置を検出する路側通信機であって、
GPS衛星から送信される信号を受信してGPS測位精度に関するGPS情報を取得するGPS受信機と、
取得したGPS情報に基づいて、前記位置情報の精度を推定する制御部と
を備えたことを特徴とする路側通信機。
【請求項2】
前記GPS情報には、GPS衛星の捕捉数が含まれる請求項1記載の路側通信機。
【請求項3】
前記GPS情報には、DOP値が含まれる請求項1記載の路側通信機。
【請求項4】
前記GPS情報には、前記GPS衛星からの信号受信強度及び信号対雑音比の少なくとも一方が含まれる請求項1記載の路側通信機。
【請求項5】
前記位置情報及び、推定した当該位置情報の精度に基づいて、前記アップリンク信号の受信可能な通信エリアを推定する請求項1〜4のいずれか1項に記載の路側通信機。
【請求項6】
前記路側通信機は、所定のダウンリンクエリアに対して前記車載通信機が受信可能なダウンリンク情報を送信する送信部を備えており、
前記送信部は、前記位置情報及び推定した当該位置情報の精度に基づいて、当該路側通信機が無線で提供するダウンリンク情報の内容を決定する請求項1〜5のいずれか1項に記載の路側通信機。
【請求項7】
前記ダウンリンク情報には、前記車載通信機が車両の安全運転を支援するための安全運転支援情報を含めることができるように構成されており、
前記送信部は、前記位置情報及び推定した当該位置情報の精度が所定レベル以上と判断された場合にのみ、前記ダウンリンク情報に前記安全運転支援情報を含める請求項1〜6のいずれか1項に記載の路側通信機。
【請求項8】
車載通信機のアップリンク信号に含まれる位置情報の精度を推定する位置精度推定方法であって、
GPS衛星から送信される信号を路側通信機が受信してGPS測位精度に関するGPS情報を取得し、
取得したGPS情報に基づいて、前記位置情報の精度を推定する
ことを特徴とする位置精度推定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−209883(P2011−209883A)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願番号】特願2010−75501(P2010−75501)
【出願日】平成22年3月29日(2010.3.29)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願日】平成22年3月29日(2010.3.29)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]