
路線の3次元動画生成用画像取得システム
【課題】 実画像を用いて線状の目標物の景観3次元動画を提供するシステムに対して画像取得手段を提供する。
【解決手段】 地上の線状の目標物の上空から高密度に多方向から撮影した画像をデータベース化し、線状の目標物およびその周辺部の位置に対して任意の視点経路と視線方向に対応した画像をデータベースから検索して、検索した画像を実際の視点との視差に対応してモーフィング処理により連続した滑らかな3次元動画に生成することを特徴とする景観3次元動画システムにおいて該画像データベースに登録する画像を線状の目標物に特化して効率的に取得することを可能とする。
【解決手段】 地上の線状の目標物の上空から高密度に多方向から撮影した画像をデータベース化し、線状の目標物およびその周辺部の位置に対して任意の視点経路と視線方向に対応した画像をデータベースから検索して、検索した画像を実際の視点との視差に対応してモーフィング処理により連続した滑らかな3次元動画に生成することを特徴とする景観3次元動画システムにおいて該画像データベースに登録する画像を線状の目標物に特化して効率的に取得することを可能とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、路線、通路、河川等、線状をなす地上目標の景観の3次元動画を上空から撮影した写真を利用して生成するシステムにおいて、特に、航空機等により地上を様々な角度から撮像し画像を取得するシステムに関するものである。
【背景技術】
【0002】
従来、都市景観を3次元で動画表示する方式として、都市の建造物の立体モデルを作成し建造物の壁面をテクスチャーマッピングにより貼り付け、得られた3次元都市モデルに対して3次元画像処理により3次元動画を得る方法がある。
【0003】
また、別の方法では、空中および通路上に高密度のメッシュ点を設定してそこから多方向の画像を広範囲に撮像できるシステムを構築し、これら大量の画像をデータベース化し、都市の任意の位置を任意の視点で任意の方向から見た場合の最も視差の少ない画像を高速に検索するシステムを構築し、さらに指定した視点、視線、都市の中での位置に対応して最も視差の少ない画像から連続的になめらかな動画像をモーフィングにより生成する方法もある。(特許文献4)この方法の特徴は極めて大量かつ多視点、多視線方向の航空写真または市街地の路上写真を事前に撮影蓄積することにあるが、航空写真を取得する従来技術として、最近はディジタル技術の急速な進歩によりアナログ式航空カメラからディジタル方式の1次元ラインセンサないし2次元撮像素子を用いた航空写真用カメラが実用化されている。
【0004】
さらに汎用デジタルカメラの高性能化により、航空写真分野へも適用可能となってきている。専用ソフトウェアによりディジタルカメラで撮影した斜め写真からオルソ画像を作成するシステムが特許文献1では提案されている。測量目的の航空写真では地上に基準点を予め設定し、該基準点を参照してカメラ位置と姿勢を計算し、地物の座標を求めていたが、航空機にGPS(Global Positioning System)及びIMU(Inertial Measurement Unit)を装備し、撮像時点のカメラの位置と姿勢を測定することできる。(特許文献2)撮像方向が異なる3台のCCDラインセンサで測量用航空写真を撮像する技術が特許文献3で提案されている。
【0005】
本発明は特許文献4「都市景観の3次元動画アミューズメントシステム」になる実航空写真を用いた3次元動画生成システムに対して線状の目標物に対する実航空写真を効率的に取得する方法に関するものであるが、特許文献4の方法は、各実航空写真に対する撮影位置、撮影光軸方向、撮影光軸回転角等、画像メタデータが正確に求められている必要がある。精度に制約のあるGPSおよび姿勢センサを使用して実航空写真を取得した場合に、撮影する画像の重複が大きいことを利用して地図あるい高分解能衛星オルソ画像を用いて撮影位置、撮影光軸方向、撮影光軸回転角等、画像メタデータを補正する方法として特許文献5および特許文献6がある。
【0006】
【特許文献1】特開2002-357419号公報。
【特許文献2】特開2004-245741号公報。
【特許文献3】特許2807622号公報。
【特許文献4】特願2008-060351
【特許文献5】特願2008-136125
【特許文献6】特願2008-184349
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献4の方法は都市の3次元モデルの壁面にテクスチャーを貼り付ける工数を省略できる利点があるが、2次元的な広がりを持つ地域を対象に画像を取得することを前提にしており、鉄道、道路、河川など線状の目標物およびその周辺部に特化して効率的に画像を取得する場合、効率面において欠点があった。
【0008】
上記の解決すべき課題に鑑みて鋭意研究の結果、本発明者は特許文献4の方法における空中画像取得は、目標とする地表部分に対して空中からの写真撮影光軸ベクトルを如何に均一かつ高密度に分布させるかという目的で設計されているが、線状の目標物に対しては必ずしも最適に設計されていないことに気がついた。とくに、線状の目標物に限定すると、空中からの写真撮影光軸ベクトルの分布が該線状目標物の周辺のみに均一かつ高密度に集中しないことが問題であり、航空機による画像取得方法およびシステムを効率よく線状の目標物に対して最適化することが解決すべき課題である。
【課題を解決するための手段】
【0009】
上記解決課題に鑑みて鋭意研究の結果、本発明者は線状の目標物およびその周辺部のみに対して、空中からの写真撮影光軸ベクトルの分布が均一かつ高密度に集中させるために最大の障壁となるのは、該線状目標物の形状に対応して効率的に画像取得を行う手段がないこと、具体的には、画像取得システムにおけるディジタルカメラ集合体の構成法が線状の目標物に対応していないこと、さらに航空機の飛行経路が線状の目標物に対応していないことを認識するに至った。このため、本発明者はこの課題を解決するための方法として
、第一に飛行経路を線状の目標物およびその周辺に写真撮影光軸ベクトルを均一かつ高密度に分布させる方法として、航空機撮影航路を線状目標物を中心に上空左右に対称に設定することを着想するに至った。
【0010】
第二に、ディジタルカメラ集合体の構成法を該航空機撮影航路に対応して変更し、該線状目標物とその周辺に空中からの写真撮影光軸ベクトルの分布が均一かつ高密度に集中するようにした。この目的のため、ディジタルカメラ集合体の構造を下方全方向に対して対称な構造を持つものと、飛行方向の左下方または右下方に写真撮影光軸ベクトルの分布が集中する構造を持つものを用意し飛行経路により交換可能な構造を考案した。
【0011】
第三に、本発明者は該線状目標物とその周辺に空中からの写真撮影光軸ベクトルの分布が該線状目標に対して左右対称であるべきことから、飛行方向の左下方または右下方に写真撮影光軸ベクトルの分布が集中する構造を持つディジタルカメラ集合体を機上で飛行経路に対して180度回転させることにより同一のディジタルカメラ集合体を飛行方向の左下方または右下方のいずれにも写真撮影光軸ベクトルの分布を集中させることを可能な画像取得システムを構築した。
【0012】
第四に、本発明になる航空機画像取得方法は隣接する位置の撮影画像の相互の重複が大きいためタイポイントによる自動または手動による位置あわせにより相互の撮影位置と姿勢を補正することが可能である。一定間隔ごとに直下撮影画像を高分解能オルソ画像または地図で位置あわせをすれば全ての取得画像について正確なメタデータを得ることが出来るシステムを構築した。これは、本発明になる航空機画像取得装置は可動部分がある一方、要求されるメタデータの精度が高いこともあり実用上不可欠な技術である。とくに、GPS/INSについて自動操縦に適用できない低価格の機材を使用してコスト削減を行うためには不可欠である。
【0013】
第五に、第二と第三に述べたことの一般的拡張として該線状目標物の上空を該線状目標物を対称に包み込むように円筒状ない長円筒状に航空路を複数設定し、該航空路より該線状目標物およびそうの周辺を指向するようにディジタルカメラ集合体を構成するディジタルカメラの指向方向と焦点距離を該航空路に対応して可動式に変更可能な構造を有する航空機画像取得システムを構築した。
【発明の効果】
【0014】
以上、説明したように、本発明の路線の3次元動画生成用画像取得システムによれば、線状の形状を有する目標物に対して、実画像を用いた3次元動画生成システム用の航空写真を効率よく取得することができる。
【発明を実施するための最良の形態】
【0015】
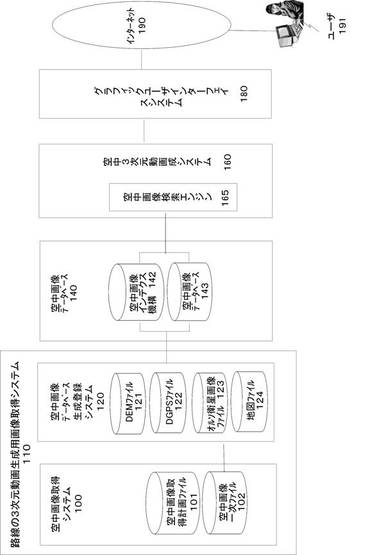
以下、添付図面を参照しながら、本発明の路線の3次元動画生成用画像取得システムを実施するための最良の形態を詳細に説明する。図1は背景となる技術を説明するための図であり、本実施形態の「路線の3次元動画生成用画像取得システム」が「3次元景観の動画生成システム」全体構成の中で使用される位置付けを概略的に示す図である。なお、特許文献4では「3次元景観の動画生成システム」のことを「都市景観3次元動画アミューズメントシステム」と呼称しているが内容は同一のものである。特許文献4の「都市景観3次元動画アミューズメントシステム」では、空中の視点から都市景観の3次元動画生成を行うための部分と、視点が路上にある場合に3次元動画生成を行うための部分の双方について説明しているが、ここでは、視点が路上にある場合を扱わないので、空中の視点から都市景観の3次元動画生成を行うための部分と、双方に共通的なグラフィックユーザインターフェイスシステム180のみについて記載している。ユーザ191にはインターネットまたはイントラネット190を介してサービスが提供される。
【0016】
図1の空中画像データベース140、空中画像データベース143、空中3次元動画成システム160、空中画像検索エンジン165、グラフィックユーザインターフェイスシステム180は取得された航空写真を利用して3次元動画を生成しユーザ191の要求に応じて表示するシステムであり、特許文献4に内容が記載されている内容と同一である。
路線の3次元動画生成用画像取得システム110 は本発明になる部分であるが、航空機により空中で航空写真を取得するための空中画像取得システム100と構成要素の空中画像取得計画ファイル101、空中画像一次ファイル102、取得した航空写真を3次元動画生成に使いやすいように加工しデータベース化するための空中画像データベース生成登録システム120、構成要素のDEMファイル121、DGPSファイル122についても本発明で特に記載がない部分は特許文献4に記載されている内容と同一である。以下、新規性のある部分について説明を行う。
【0017】
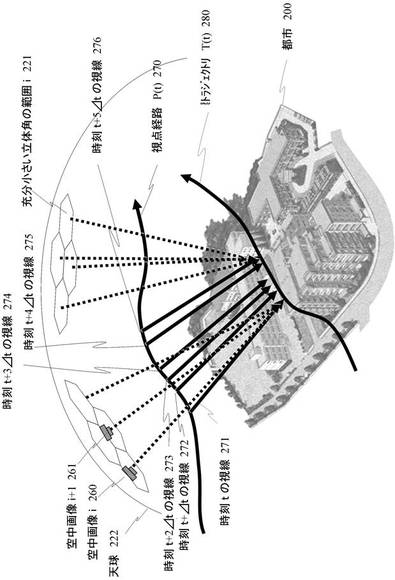
図2では都市200の上空天球222を充分小さい立体角の範囲i221のように一定の角度で立体的に分割して、天球222を覆う地表近くを除くすべての該充分小さい立体角に対して地表のあらゆる場所の画像を準備するための空中画像取得システム100の概念を示している。 図2の隣接する該充分小さい立体角の範囲i221で撮影された同一地点に対する画像は視差のため見え方が若干異なるが、この若干異なった画像間の視界を線形変換により画像を連続的に変形させて補間し、滑らかな3次元動画を得るためのモーフィング処理を行う。
【0018】
図2により、3次元景観の動画生成システムにおける模擬飛行による模擬視界発生の概念を説明する。視点経路P(t) 270に沿って視点が時刻tとともに移動し、その間、地表を目標トラジェクトリT(t) 280に沿って視界にとらえる。該目標トラジェクトリT(t) 280は該視点経路P(t) 270上の位置から、時刻t の視線271、時刻t+δt の視線272、時刻t+2δt
の視線273、時刻t+3δt の視線 274、時刻t+4δt の視線275、および時刻t+5δt の視線276によりδtごとにとらえられた地表上の軌跡である。該視点経路P(t) 270からの該目標トラジェクトリT(t) 280に対する3次元景観の動画を生成する方法として、時刻tの視線271から時刻t+5δtの視線276に近く視差の少ない空中画像i260および空中画像i+1 261を空中画像データベース143より検索し、時刻t の視線271、時刻t+δt の視線272、および時刻t+2δt
の視線273の間は最も視線が近い空中画像i260を原画像として使用して、時刻t
の視線271、時刻t+δt の視線272、および時刻t+2δt の視線273と空中画像i260の視線の間の視点の相違による視差を空中画像i260に対するモーフィング処理で補正し、時刻t+3δt の視線 274からは空中画像i260よりも空中画像i+1 261の方が視点の相違による視差が少ないと判断して空中画像i+1 261を原画像に切り替え、時刻t+3δt の視線 274、時刻t+4δt
の視線275、時刻t+5δt の視線276と空中画像i+1 261の視線の間の視点の相違による視差を空中画像i+1 261に対するモーフィング処理で補正することにより滑らかな該目標トラジェクトリT(t)
280に沿った3次元景観の動画生成を行うのである。
【0019】
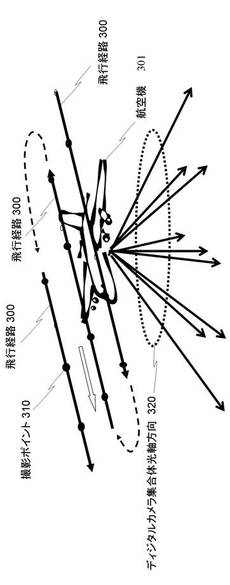
本発明になる方法は膨大な量の空中画像を必要とするが、その取得方法についての例を示したのが図3である。航空機301に図4に示すような多数のディジタルカメラを収容したディジタルカメラ集合体を搭載し、飛行経路300に沿って一定間隔ごとの撮影ポイント310で地表を撮影する。飛行経路300と撮影ポイント310を網目状に濃密に設定し、複数のディジタルカメラを搭載してディジタルカメラ集合体光軸方向320に示すように同時に多方向の画像を撮影することにより、図2に示す該充分小さい立体角の範囲i221ごとの画像を取得する。
【0020】
図4は空中画像取得システム100を構成するディジタルカメラ集合体345の構成例を示した図である。地表をあらゆる視点から効率よく高密度に撮影する目的で、直下方向のディジタルカメラ340aの周辺に水平全周方向が放射状に等間隔に分割されるように複数の斜め方向ディジタルカメラ340bから340iまでの8台を光軸が重力方向となす角が同一となるように配置してディジタルカメラ集合体345を形成したものである。とくに航空機に搭載して撮影する場合には、滞空証明を取得する必要があり、航空写真撮影用に航空機床面にあいている穴を変更したり、あるいは該床面穴から機体外にカメラが飛び出す形で利用することは事実上不可能であるため、ディジタルカメラ集合体345をCanon社製の小型または一眼レフディジタルカメラを利用して該ディジタルカメラ集合体が該航空機床面穴内に収まるよう工夫したものであり、図12、図13ないし図15に航空機床面穴への実装方法を示す。ディジタルカメラ集合体 345を構成するディジタルカメラ340a〜i以外の支持構造は、撮影方向精度が高いことを要求されるので、軽量かつ剛性の高いものであればどのようなものでもよく、ハニカム構造アルミニウム板あるいは炭素樹脂などで構成することができる。
【0021】
図5は、航空機による空中画像取得システムの航路および撮影ポイントの設定例を示したものである。図5(b)にて撮影ポイント310の設定例を示している。飛行経路300は空中に撮影ポイント310の網目を構成するために等間隔で平行な飛行航路300を図5(b)で点線で結んであるようにUターンしながら往復する形で飛行する。この間、撮影ポイント310で撮影を行う。撮影ポイント310の相互間隔は、飛行航路間撮影間隔372と 飛行方向撮影間隔371により規定される。ディジタルカメラ集合体345で撮影した場合、図5(a)のディジタルカメラ340a〜iの撮影範囲350a〜iで示す範囲が撮影される。飛行高度、斜め方向ディジタルカメラ340b〜iの鉛直方向となす角度、およびレンズの焦点距離の設定によって、該ディジタルカメラ340a〜iの撮影範囲350a〜iの各ディジタルカメラが撮影する範囲は、相互に若干の重複しながら地表をほぼ連続的に覆うように設定することが望ましい。以上に述べた3次元景観の動画生成システムおよび、そのための航空写真による画像取得システムは、2次元的な広がりを有する地表地域を対象とすることを前提にしており、鉄道路線、道路、河川等の線状の目標物は前提としていない。
【0022】
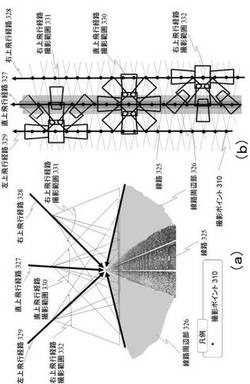
図6は該線状の目標物に対する画像取得の方法を示したものであり、図6(b)は線路325と線路周辺部326を上空から見た図である。線路325の直上には直上飛行経路327がああり、地表との一定高度を保ちながら一定間隔の撮影ポイント310で撮影を行う。線路325より左右に対称に一定距離離れて左上飛行経路329と右上飛行経路328を設定し、同様に地表との一定高度を保ちながら一定間隔の撮影ポイント310で撮影を行う。撮影ポイント310は相互に格子点を形成するようにGPS装置で位置を計測しながら撮影を行う。
【0023】
図6(a)は線路325の進行方向に図6(b)を立体的に遠近法で見た図である。右上飛行経路328よりの撮影範囲は、右上飛行経路撮影範囲 331で示され、飛行経路方向の直下および左下方を撮影する。左上飛行経路329よりの撮影範囲は、左上飛行経路撮影範囲 332で示され、飛行経路方向の直下および右下方を撮影する。直上飛行経路327からの撮影は飛行経路方向に対して左右対称の直上飛行経路撮影範囲 330である。このように飛行経路と各飛行経路からの撮影範囲を設定することにより線路325および線路周辺部326を少ない飛行経路で可能な限り多く均一な画像撮影ベクトルで覆うことが可能となる。図6では3本の飛行経路による最小の飛行経路数の例を示したが、左右に2本の飛行経路を配した5本の飛行経路も可能であり、さらに飛行経路を増やすことも可能であるが、コストとのトレードオフで決定すべき事項である。右上飛行経路撮影範囲 331、左上飛行経路撮影範囲 332、直上飛行経路撮影範囲 330の各々について真上から見た形状と各飛行経路との位置関係を図6(b)に記した。
【0024】
図7は地表高度700m、50mm標準レンズを直下に指向し、30mm中望遠レンズをオフナディア角27.5度、105mm望遠レンズをオフナディア角45度に設定した場合の各レンズに対応した地上の撮影範囲例を示したものである。各レンズの焦点距離の組み合わせ、オフナディア角の設定は線路325および線路周辺部326を少ない飛行経路で可能な限り多く均一な画像撮影ベクトルで覆うことを目的に設定する。図7の標準撮影範囲333、中望遠撮影範囲334、望遠撮影範囲335の配置および重複度は図4のディジタルカメラ集合体345の図6に示すディジタルカメラ340a〜iの撮影範囲、および、図8のディジタルカメラ集合体S365の図9に示すディジタルカメラ360Sa〜Siの撮影範囲設定の基礎となる数値となる。
【0025】
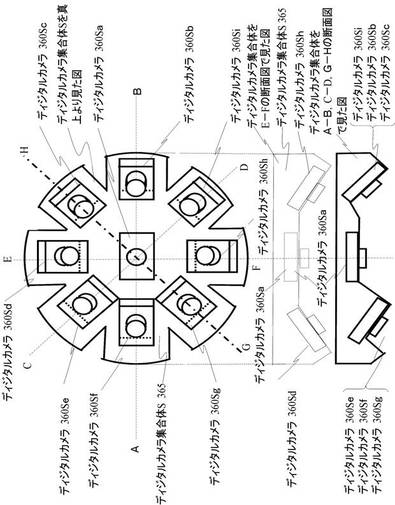
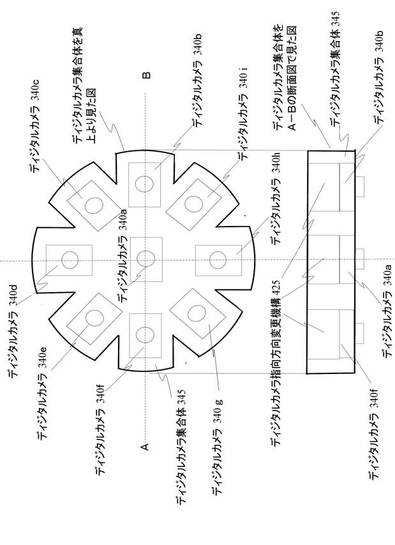
図8はディジタルカメラ集合体S365の構成例を示す図である。図6に示すように左上飛行経路329、および右上飛行経路328では撮影範囲を線路325側に指向させる必要があるため、図4の直上飛行経路327用のディジタルカメラ集合体345に対して構造の変更を行ったものである。図8の平面図において、E−F軸に沿う断面図の構造は図4のディジタルカメラ集合体345と同一であるが、C−D軸、A−B軸、G−H軸に沿う断面図の構造は図8においては左下を指向するように変更されている。ここで、ディジタルカメラ集合体S365および、ディジタルカメラ 360Sa〜Siにおける「S」は右上飛行経路用または左上飛行経路用ということで「Side」の頭文字を意味する。ディジタルカメラ集合体をA−B軸,C−D軸,G−H軸の断面図で見た図において、ディジタルカメラ360Si、ディジタルカメラ360Sb、ディジタルカメラ360Scは図4のディジタルカメラ集合体345に対比して中望遠レンズから望遠レンズに変更し、またオフナディア角も図7の内容に対応して増加してある。
【0026】
航空機床面穴367内に設置した場合に視界が遮られないようにオフナディア角の最も大きいディジタルカメラ360Si、ディジタルカメラ360Sb、ディジタルカメラ360Scを航空機床面穴367の壁面から最も遠くなるように配置してある。ディジタルカメラ360Se、ディジタルカメラ360Sf、ディジタルカメラ360Sgは中望遠レンズによる左下方向撮影用であるがE−F軸の断面図の構造に比較してカメラの指向方向を反転させた。各ディジタルカメラのレンズ選択およびオフナディア角の選定は図7の数値に基づいている。ここで最も注意すべきことは航空機床面穴367の壁面とディジタルカメラ集合体S365の位置関係により、ディジタルカメラ360の視界が航空機床面穴367の壁面で遮られることである。これを防ぐためディジタルカメラ集合体S365を航空機床面穴367へ、期待の外部にはみ出さないように最大限に吊下するよう設定した。
【0027】
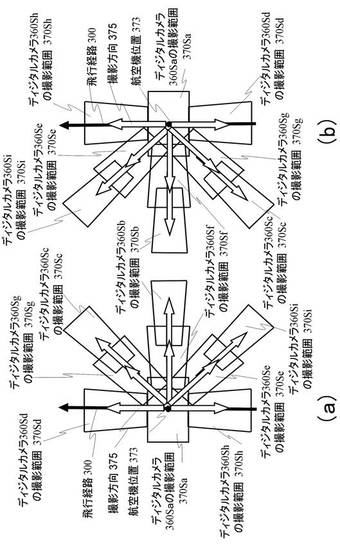
図9は図8のディジタルカメラ369Sa〜Siまでによる地表でのディジタルカメラ360Sa〜Siの撮影範囲370Sa〜Siを図示したものである。図9(a)は左上飛行経路 329用の設定であり、図9(b)は右上飛行経路 328用の設定である。図9(a)、図9(b)のディジタルカメラ360Sa〜Siの撮影範囲370Sa〜Siは図8のディジタルカメラ集合体S365を水平面に沿って180度回転させることにより同一のディジタルカメラ集合体S365で実現することが可能である。
【0028】
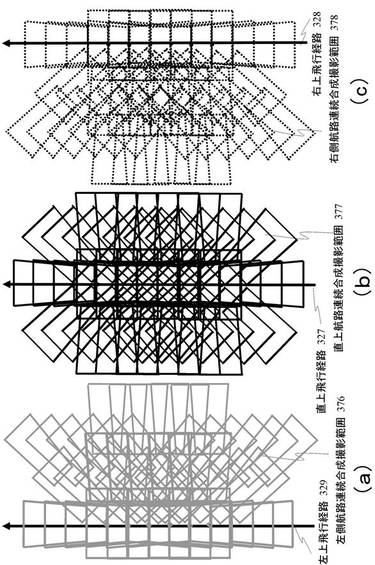
図10は右上飛行経路328、直上飛行経路327、および左上飛行経路329に沿って各々、図5のディジタルカメラ集合体S365、図4のディジタルカメラ集合体345、および図5のディジタルカメラ集合体S365で撮影ポイント310ごとに連続的に撮影した場合の地上における画像取得範囲を示す図であり、図10(a)は左上飛行経路329に沿って得られる左側航路連続合成撮影範囲376を示し、図10(b)は直上飛行経路327に沿って得られる直上航路連続合成撮影範囲377を示し、図10(c)は右上飛行経路328に沿って得られる右側航路連続合成撮影範囲378を示したものである。
【0029】
図10(a)、(b)、(c)はそれぞれ、表示が見づらくなることを防ぐ理由で実際より撮影ポイント310の密度を1/2ないし1/4に減じてある。また、図10(a)、(b)、(c)はいずれも相互に重複しないで図示してあるが、実際は線路325および線路周辺部326を右上飛行経路328、左上飛行経路329、直上飛行経路327のいずれもが撮影範囲内に収めるよう相互の間隔を決める。飛行高度700mの例の場合、右上飛行経路328と直上飛行経路327の水平間隔および左上飛行経路329と直上飛行経路327の水平間隔を、それぞれ600から800m程度に設定することが望ましく、図11に示すように各航路連続合成撮影範囲は相互に線路325の周囲で重複し、全航路連続合成撮影範囲379として線路325に沿って空中各方向からの高密度かつ均一な画像撮影方向ベクトルを形成する。
【0030】
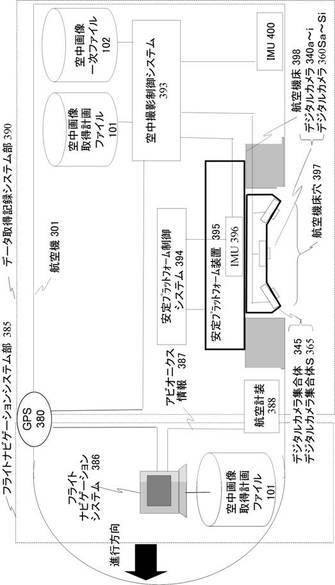
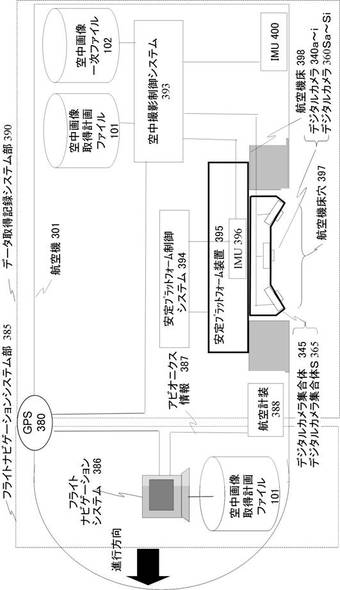
図12は、航空機301にデジタルカメラ集合体345、デジタルカメラ集合体S365を含むデータ取得記録システム部 390を構築し実装する方法と、フライトナビゲーションシステム部385を構築し実装する方法を示している。詳細な内容については特許文献4に記載の内容と同一でよい。図12において、航空機301には機体下方に航空写真機設置用の航空機床穴397があり、この穴にディジタルカメラ集合体345、ディジタルカメラ集合体365Sを機外に張り出さないように設置する。図12の例では安定プラットフォーム装置395により航空機床穴397に吊下する構造を採用しているが、安定プラットフォーム制御システム
394および安定プラットフォーム装置395は航空機301の姿勢に拘らずディジタルカメラ集合体345、ディジタルカメラ集合体365Sを常に地上直下に指向させ、かつ方位を規定方向に固定する機能を有するが、航空機のピッチ・ロールを常時5°以内に操縦で保てるのであれば安定プラットフォーム装置395を省略してもよい。IMU396は慣性計測装置の英語表現の頭文字であり、安定プラットフォーム装置395に乗せることによりディジタルカメラ集合体345、ディジタルカメラ集合体365Sの姿勢を計測することができる。ディジタルカメラ集合体345、ディジタルカメラ集合体S365の上面は航空機床398より上に出てもよい。
【0031】
データ取得記録システム部 390には航空機301の姿勢を観測するIMU400と、ディジタルカメラ340a〜iまたはディジタルカメラ360a〜iの制御と撮像データ処理のためのプログラムを含む空中撮影制御システム393と、画像データおよび撮影位置、撮影時ディジタルカメラ集合体345、ディジタルカメラ集合体S365の姿勢をふくむ各種データを記憶する大容量ディスク装置で構成される空中画像一次ファイル102と、ディジタルカメラ340a〜iまたはディジタルカメラ360a〜iに対する撮影指令を出すための撮影ポイントを記憶している空中画像取得計画ファイル101を機内に搭載している。航空機301の位置計測用のGPS380のアンテナを機外に有している。空中画像取得計画ファイル101、空中画像一次ファイル102、空中撮影制御システム393、フライトナビゲーションシステム 386、安定フ゜ラットフォーム制御システム394、安定フ゜ラットフォーム装置395の構成と機能については特許文献4に記載されている。
【0032】
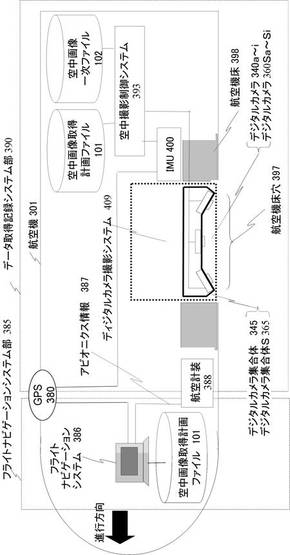
図13は、左上飛行経路329、直上飛行経路327、右上飛行経路328の各々に対応してディジタルカメラ集合体345およびディジタルカメラ集合体S365の構成を変更することに対応してディジタルカメラ撮影システム409を構築して航空機床穴397より機体外に突出部が無いように実装した例である。図13における実装例では図12で存在した安定フ゜ラットフォーム装置395、安定フ゜ラットフォーム制御システム394、および空中撮影制御システム393内のアンテイプラットフォームに関連する処理を除外してある。図13の実装方法では、機体姿勢を水平に対して5度程度以内の偏差で保つことを前提にディジタルカメラ撮影システム 409を航空機床398に固定する方法を採用しているが、図12のように安定プラットフォーム装置を導入することも可能である。ただし、この場合、ディジタルカメラ撮影システム409の総重量がディジタルカメラ集合体345より大きくなるので安定プラットフォーム装置の重量とコストが増大する。
【0033】
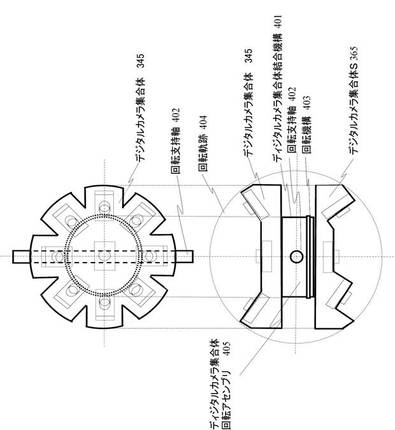
図14はディジタルカメラ撮影システム409の主要部を構成するディジタルカメラ集合体回転アセンブリ405の構造と機能を示す図である。直上飛行経路327用のデジタルカメラ集合体345と右上飛行経路328および左上飛行経路329用のデジタルカメラ集合体S365をディジタルカメラ集合体結合機構401を介して相互に背面を向き合うように接続し一体化する。回転支持軸402はデジタルカメラ集合体345またはデジタルカメラ集合体S365のいずれか一方が航空機床穴397より下方を指向するようにするための回転を行うためにある。回転機構403は右上飛行経路328と左上飛行経路329でデジタルカメラ集合体S365の方向を水平面内で180度変更する必要があるので、これを実現するための回転機構で回転ベアリング機構などにより実現することが出来る。回転機構403の回転はディジタルカメラ集合体結合機構401の円筒の中心軸と回転の中心軸を共有する。ディジタルカメラ集合体回転アセンブリ405は回転支持軸402に回りを回転可能であるが、デジタルカメラ集合体345、デジタルカメラ集合体S365の外周部は対称かつ均一に回転軌跡404に内接する。
【0034】
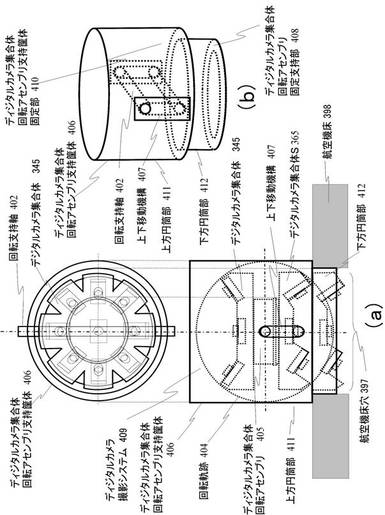
図15はディジタルカメラ撮影システム409の構成法と航空機への実装法を示す図である。図15(a)は上方と側面から見た図面である。図14で示したディジタルカメラ集合体回転アセンブリ405はディジタルカメラ集合体回転アセンブリ支持筐体406内部にディジタルカメラ集合体回転アセンブリ405の回転支持軸402をディジタルカメラ集合体回転アセンブリ支持筐体406内部の上下移動機構407に挿入してディジタルカメラ撮影システム409を構成する。
【0035】
図15(b)はディジタルカメラ集合体回転アセンブリ支持筐体406を斜め上方より見た図であり、上方円筒部411、下方円筒部412、ディジタルカメラ集合体回転アセンブリ支持筐体固定部410、ディジタルカメラ集合体回転アセンブリ固定支持部 408、および上下移動機構407より構成される。このうち、ディジタルカメラ集合体回転アセンブリ支持筐体固定部410は円環状の平面であり、外側の円周で上方円筒部411と固着し、内側の円周で下方円筒部412と固着する。ディジタルカメラ集合体回転アセンブリ支持筐体固定部410はディジタルカメラ集合体回転アセンブリ支持筐体406およびディジタルカメラ撮影システム409を航空機床 398に固定する機能を有する。このため航空機床 398に沿って上方円筒部411の外側に延長部分を持ってもよい。下方円筒部412は航空機床穴 397に機体の外部に突出しないように収まる。
【0036】
ディジタルカメラ集合体回転アセンブリ固定支持部408は円環状の平面であり、外側の円周で下方円筒部412と固着する。ディジタルカメラ集合体回転アセンブリ固定支持部408はディジタルカメラ集合体回転アセンブリ405を上下移動機構407により、デジタルカメラ集合体345またはデジタルカメラ集合体S365のいずれかを重力方向に向けて下したとき、デジタルカメラ集合体345またはデジタルカメラ集合体S365を水平に支える機能を有する。上下移動機構407は下方でディジタルカメラ集合体回転アセンブリ405を支える機能を持つと同時に、上方にディジタルカメラ集合体回転アセンブリ405を引き上げたとき、ディジタルカメラ集合体回転アセンブリ405をその位置に保持し、回転支持軸402の回りにディジタルカメラ集合体回転アセンブリ405を回転軌跡404に沿って回転せしめ、デジタルカメラ集合体345またはデジタルカメラ集合体S365のいずれかを重力方向に向けることを可能とする。
【0037】
ディジタルカメラ集合体回転アセンブリ405が上下移動機構407の上側で保持され、回転支持軸402のまわりを回転し、デジタルカメラ集合体S365が上側を向いた位置で停止した状態で、図14で示す回転機構403を用いてデジタルカメラ集合体S365を水平面内で180度回転させることが出来る。この機能により、デジタルカメラ集合体S365を図6の右上飛行経路328および左上飛行経路 329のいずれにも適用することが出来る。
【0038】
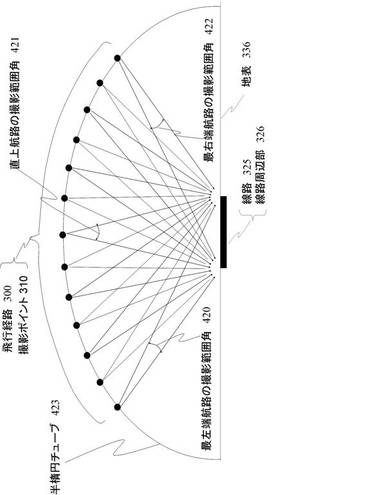
図16は図6に比較して、より理想的に線路325および線路周辺部326の全領域に亘って、これを見込む画像光軸ベクトルが上空天球上に均一な密度で分布するための飛行経路300の設定法を示すものである。図6の場合、線路325に沿う飛行経路は3本であり、線路325に直交する面内(直交面内)での線路325を見込む画像光軸ベクトルは約45度に1本であり3本しかない。このため該直交面内での線路325に対する俯角方向の視点の動きに対して滑らかな画像を生成することが困難である。図6の航路設定は、線路325の進行方向に対しては撮影ポイント310が稠密に存在するため線路に直交する構造物に対する滑らかな動画生成が可能であり、また線路325の斜め上空から線路325または線路周辺部326に沿った視点、視線の変化に対して滑らかな動画生成が可能である。ここで論じているのは線路325の直交面内での線路325に対する俯角方向の視点の動きに対してのみ滑らかさが欠けるということである.
【0039】
この問題を解決するためには図16に示すように線路325および線路周辺部326に沿って該上空を半楕円チューブ423で覆い、該半楕円チューブ上を線路325に沿う形で飛行経路300を複数設定すればよい。図16は線路325に直交する平面での断面を示している。図16は飛行経路300が13本ある例であるが、線路325に直交する面内(直交面内)での線路325を見込む画像光軸ベクトルは焼く120度にわたって13本存在し、約10度ごとに1本存在する。飛行経路300の数は費用対コストの見地から増減させるのが望ましい。撮影ポイント310は各飛行経路300に沿って一定間隔ごとに設定される。各飛行経路300から線路325および線路周辺部326を見込む角度は、最左端の飛行経路300から最右端の飛行経路300に向けて、最左端航路の撮影範囲角420、直上航路の撮影範囲角421、さらに最右端航路の撮影範囲角422となるが、これらの角度はほぼ同一となるようにディジタルカメラ集合体の望遠レンズの焦点距離と各ディジタルカメラの指向方向を設定する。
【0040】
図17は図16に示される飛行経路300にに対応した撮影を行うためのディジタルカメラ集合体345の構成例であり、各ディジタルカメラ340a〜iに対してディジタルカメラ指向方向変更機構425を設け、各ディジタルカメラの指向方向を変更可能とした。ズームレンズの焦点距離を計算機指令により外部から変更可能なディジタルカメラが現時点で実用化、市販されており、計算機指令で変更可能である。ディジタルカメラ指向方向変更機構425に対して計算機指令で個別に指向方向を変更すれば、焦点距離の変更とあわせて図16に示す撮影計画を実施することが出来る。図17のディジタルカメラ集合体345は図12または図13の航空機に実装することが出来る。
【0041】
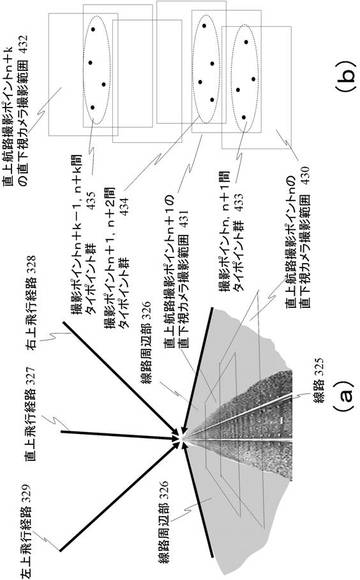
図13におけるディジタルカメラ集合体345、デジタルカメラ集合体S365の実装方法、および図15におけるディジタルカメラ撮影システム409の実装方法では、安定フ゜ラットフォーム装置を用いない。このため航空機301の姿勢の擾乱により、ディジタルカメラ集合体345およびデジタルカメラ集合体S365の直下方向指向のディジタルカメラ340a、360aは撮影ポイント310の直下点を指向しないでずれが生じる。この結果、図18に示すように直上航路撮影ポイントnの直下視カメラ撮影範囲430、直上航路撮影ポイントn+1の直下視カメラ撮影範囲431以降、直上航路撮影ポイントn+kの直下視カメラ撮影範囲432まで図18(b)に示すようにずれながら重複することになる。
【0042】
特許文献4にある実画像を用いた3次元動画生成システムにあっては、各画像の撮影位置、撮影方向、光軸周りの回転角等の正確なメタデータが必要である。このため、直上航路撮影ポイントnの直下視カメラ撮影範囲430と、これと離れた位置にある直上航路撮影ポイントn+kの直下視カメラ撮影範囲432について、画像内の目標点を4箇所以上、地図又は高分解能オルソ衛星画像により位置、標高を求め、画像メタデータを逆算して求める。直上航路撮影ポイントnの直下視カメラ撮影範囲430と直上航路撮影ポイントn+kの直下視カメラ撮影範囲432の間の画像については重複部分のタイポイントである撮影ポイントn,n+1間タイポイント群433、撮影ポイントn+1,n+2間タイポイント群434を順次、撮影ポイントn+k−1,n+k間タイポイント群435まで求めて行き、中間の画像のメタデータを求める。この方法は、特許文献5および特許文献6に記載されている。
【産業上の利用可能性】
【0043】
本発明の航空写真画像取得システムは、航空機に搭載されるカメラの制御装置及び撮像装置として産業上利用することができる。また、線路に限らず線状の構造を持つ、高速道路、道路、河川、送電線、パイプラインなどの地表の地物の3次元的情報を得る目的で実画像を取得し画像データベースを構築することに利用できる。
【図面の簡単な説明】
【0044】
【図1】本発明の路線の3次元動画生成用画像取得システムの構成と3次元景観の動画生成システム全体構成の中で使用される位置付けを概略的に示す図である。
【図2】図1に示す3次元景観の動画生成システムにおける空中画像取得と実画像を用いたモーフィングによる動画像生成の概念について説明する図である。
【図3】図1に示す3次元景観の動画生成システムにおける空中画像取得の概念を示す図である。
【図4】本発明の航空機搭載ディジタルカメラ集合体の例について説明する図である。
【図5】本発明の航空機による空中画像取得システムの航路および撮影ポイントの設定例を示す図である。
【図6】本発明の航空機による線状目標物に対する空中画像取得システムの航路および撮影ポイントの設定例を示す図である。
【図7】本発明の航空機搭載ディジタルカメラ集合体のカメラ毎の撮影範囲の例を示す図である。
【図8】本発明の線状目標物に特化した航空機搭載ディジタルカメラ集合体の例について説明する図である。
【図9】本発明の線状目標物に特化した航空機搭載ディジタルカメラ集合体のカメラ毎の撮影範囲の例を示す図である。
【図10】本発明の線状目標物に特化した航空機搭載ディジタルカメラ集合体の各飛行航路に沿った連続的な撮影範囲の例を示す図である。
【図11】本発明の線状目標物に特化した航空機搭載ディジタルカメラ集合体の各飛行航路に沿った連続的な撮影範囲の例を全て重畳して示す図である。
【図12】本発明の航空機による空中画像取得システムの構成例を示す図である。
【図13】本発明の航空機による空中画像取得システムのもう一つの構成例を示す図である。
【図14】本発明の線状目標物に特化して各航路に対応可能な航空機搭載ディジタルカメラ集合体回転アセンブリの構造例を示す図である。
【図15】本発明の線状目標物に特化して各航路に対応可能な航空機搭載ディジタルカメラ撮影システムの構造例と航空機への搭載方法を示す図である。
【図16】本発明の線状目標物に特化した理想的な航空機航路設定法と各航路に対する撮影範囲角の構成法を示す図である。
【図17】本発明の航空機搭載ディジタルカメラ集合体のもうひとつの例について説明する図である。
【図18】本発明の空中画像取得システムにおける画像メタデータの精度向上方法を示す図である。
【符号の説明】
【0045】
100 空中画像取得システム
101 空中画像取得計画ファイル
102 空中画像一次ファイル
110 路線の3次元動画生成用画像取得システム
120 空中画像データベース生成登録システム
121 DEMファイル
122 DGPSファイル
123 オルソ衛星画像ファイル
124 地図ファイル
140 空中画像データベース
142 空中画像インデクス機構
143 空中画像データベース
160 空中3次元動画生成システム
165 空中画像検索エンジン
180 グラフィックユーザインターフェイスシステム
190 インターネットまたはイントラネット
191 ユーザ
200 都市
210 視線
221 充分小さい立体角の範囲
i
222 天球
260 空中画像
i
261 空中画像
i+1
270 視点経路 P(t)
271 時刻
t の視線
272 時刻
t+δt の視線
273 時刻
t+2δt の視線
274 時刻
t+3δt の視線
275 時刻
t+4δt の視線
276 時刻
t+5δt の視線
280 目標トラジェクトリ T(t)
300 飛行経路
301 航空機
310 撮影ポイント
320 ディジタルカメラ集合体光軸方向
325 線路
326 線路周辺部
327 直上飛行経路
328 右上飛行経路
329 左上飛行経路
330 直上飛行経路撮影範囲
331 右上飛行経路撮影範囲
332 右上飛行経路撮影範囲
333 標準撮影範囲
334 中望遠撮影範囲
335 望遠撮影範囲
336 地表
337 撮影直下点
338 撮影高度
340a〜i ディジタルカメラ
345 ディジタルカメラ集合体
350a〜i ディジタルカメラ340a〜iの撮影範囲
360Sa〜Si ディジタルカメラ
365 ディジタルカメラ集合体S
370Sa〜Si ディジタルカメラ360Sa〜Siの撮影範囲
371 飛行方向撮影間隔
372 飛行航路間撮影間隔
373 航空機位置
375 撮影方向
376 左側航路連続合成撮影範囲
377 直上航路連続合成撮影範囲
378 右側航路連続合成撮影範囲
379 全航路連続合成撮影範囲
380 GPSアンテナ
385 フライトナビゲーションシステム部
386 フライトナビゲーションシステム
387 アビオニクス情報
388 航空計装
390 データ取得記録システム部
393 空中撮影制御システム
394 安定プラットフォーム制御システム
395 安定プラットフォーム装置
396 IMU
397 航空機床穴
398 航空機床
400 IMU
401 ディジタルカメラ集合体結合機構
402 回転支持軸
403 回転機構
404 回転軌跡
405 ディジタルカメラ集合体回転アセンブリ
406 ディジタルカメラ集合体回転アセンブリ支持筐体
407 上下移動機構
408
ディジタルカメラ集合体回転アセンブリ固定支持部
409
ディジタルカメラ撮影システム
410 ディジタルカメラ集合体回転アセンブリ支持筐体固定部
411 上方円筒部
412 下方円筒部
420 最左端航路の撮影範囲角
421 直上航路の撮影範囲角
422 最右端航路の撮影範囲角
423 半楕円チューブ
425 ディジタルカメラ指向方向変更機構
430 直上航路撮影ポイントnの直下視カメラ撮影範囲
431 直上航路撮影ポイントn+1の直下視カメラ撮影範囲
432 直上航路撮影ポイントn+kの直下視カメラ撮影範囲
433 撮影ポイントn,n+1間タイポイント群
434 撮影ポイントn+1,n+2間タイポイント群
435 撮影ポイントn+k−1,n+k間タイポイント群
【技術分野】
【0001】
本発明は、路線、通路、河川等、線状をなす地上目標の景観の3次元動画を上空から撮影した写真を利用して生成するシステムにおいて、特に、航空機等により地上を様々な角度から撮像し画像を取得するシステムに関するものである。
【背景技術】
【0002】
従来、都市景観を3次元で動画表示する方式として、都市の建造物の立体モデルを作成し建造物の壁面をテクスチャーマッピングにより貼り付け、得られた3次元都市モデルに対して3次元画像処理により3次元動画を得る方法がある。
【0003】
また、別の方法では、空中および通路上に高密度のメッシュ点を設定してそこから多方向の画像を広範囲に撮像できるシステムを構築し、これら大量の画像をデータベース化し、都市の任意の位置を任意の視点で任意の方向から見た場合の最も視差の少ない画像を高速に検索するシステムを構築し、さらに指定した視点、視線、都市の中での位置に対応して最も視差の少ない画像から連続的になめらかな動画像をモーフィングにより生成する方法もある。(特許文献4)この方法の特徴は極めて大量かつ多視点、多視線方向の航空写真または市街地の路上写真を事前に撮影蓄積することにあるが、航空写真を取得する従来技術として、最近はディジタル技術の急速な進歩によりアナログ式航空カメラからディジタル方式の1次元ラインセンサないし2次元撮像素子を用いた航空写真用カメラが実用化されている。
【0004】
さらに汎用デジタルカメラの高性能化により、航空写真分野へも適用可能となってきている。専用ソフトウェアによりディジタルカメラで撮影した斜め写真からオルソ画像を作成するシステムが特許文献1では提案されている。測量目的の航空写真では地上に基準点を予め設定し、該基準点を参照してカメラ位置と姿勢を計算し、地物の座標を求めていたが、航空機にGPS(Global Positioning System)及びIMU(Inertial Measurement Unit)を装備し、撮像時点のカメラの位置と姿勢を測定することできる。(特許文献2)撮像方向が異なる3台のCCDラインセンサで測量用航空写真を撮像する技術が特許文献3で提案されている。
【0005】
本発明は特許文献4「都市景観の3次元動画アミューズメントシステム」になる実航空写真を用いた3次元動画生成システムに対して線状の目標物に対する実航空写真を効率的に取得する方法に関するものであるが、特許文献4の方法は、各実航空写真に対する撮影位置、撮影光軸方向、撮影光軸回転角等、画像メタデータが正確に求められている必要がある。精度に制約のあるGPSおよび姿勢センサを使用して実航空写真を取得した場合に、撮影する画像の重複が大きいことを利用して地図あるい高分解能衛星オルソ画像を用いて撮影位置、撮影光軸方向、撮影光軸回転角等、画像メタデータを補正する方法として特許文献5および特許文献6がある。
【0006】
【特許文献1】特開2002-357419号公報。
【特許文献2】特開2004-245741号公報。
【特許文献3】特許2807622号公報。
【特許文献4】特願2008-060351
【特許文献5】特願2008-136125
【特許文献6】特願2008-184349
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献4の方法は都市の3次元モデルの壁面にテクスチャーを貼り付ける工数を省略できる利点があるが、2次元的な広がりを持つ地域を対象に画像を取得することを前提にしており、鉄道、道路、河川など線状の目標物およびその周辺部に特化して効率的に画像を取得する場合、効率面において欠点があった。
【0008】
上記の解決すべき課題に鑑みて鋭意研究の結果、本発明者は特許文献4の方法における空中画像取得は、目標とする地表部分に対して空中からの写真撮影光軸ベクトルを如何に均一かつ高密度に分布させるかという目的で設計されているが、線状の目標物に対しては必ずしも最適に設計されていないことに気がついた。とくに、線状の目標物に限定すると、空中からの写真撮影光軸ベクトルの分布が該線状目標物の周辺のみに均一かつ高密度に集中しないことが問題であり、航空機による画像取得方法およびシステムを効率よく線状の目標物に対して最適化することが解決すべき課題である。
【課題を解決するための手段】
【0009】
上記解決課題に鑑みて鋭意研究の結果、本発明者は線状の目標物およびその周辺部のみに対して、空中からの写真撮影光軸ベクトルの分布が均一かつ高密度に集中させるために最大の障壁となるのは、該線状目標物の形状に対応して効率的に画像取得を行う手段がないこと、具体的には、画像取得システムにおけるディジタルカメラ集合体の構成法が線状の目標物に対応していないこと、さらに航空機の飛行経路が線状の目標物に対応していないことを認識するに至った。このため、本発明者はこの課題を解決するための方法として
、第一に飛行経路を線状の目標物およびその周辺に写真撮影光軸ベクトルを均一かつ高密度に分布させる方法として、航空機撮影航路を線状目標物を中心に上空左右に対称に設定することを着想するに至った。
【0010】
第二に、ディジタルカメラ集合体の構成法を該航空機撮影航路に対応して変更し、該線状目標物とその周辺に空中からの写真撮影光軸ベクトルの分布が均一かつ高密度に集中するようにした。この目的のため、ディジタルカメラ集合体の構造を下方全方向に対して対称な構造を持つものと、飛行方向の左下方または右下方に写真撮影光軸ベクトルの分布が集中する構造を持つものを用意し飛行経路により交換可能な構造を考案した。
【0011】
第三に、本発明者は該線状目標物とその周辺に空中からの写真撮影光軸ベクトルの分布が該線状目標に対して左右対称であるべきことから、飛行方向の左下方または右下方に写真撮影光軸ベクトルの分布が集中する構造を持つディジタルカメラ集合体を機上で飛行経路に対して180度回転させることにより同一のディジタルカメラ集合体を飛行方向の左下方または右下方のいずれにも写真撮影光軸ベクトルの分布を集中させることを可能な画像取得システムを構築した。
【0012】
第四に、本発明になる航空機画像取得方法は隣接する位置の撮影画像の相互の重複が大きいためタイポイントによる自動または手動による位置あわせにより相互の撮影位置と姿勢を補正することが可能である。一定間隔ごとに直下撮影画像を高分解能オルソ画像または地図で位置あわせをすれば全ての取得画像について正確なメタデータを得ることが出来るシステムを構築した。これは、本発明になる航空機画像取得装置は可動部分がある一方、要求されるメタデータの精度が高いこともあり実用上不可欠な技術である。とくに、GPS/INSについて自動操縦に適用できない低価格の機材を使用してコスト削減を行うためには不可欠である。
【0013】
第五に、第二と第三に述べたことの一般的拡張として該線状目標物の上空を該線状目標物を対称に包み込むように円筒状ない長円筒状に航空路を複数設定し、該航空路より該線状目標物およびそうの周辺を指向するようにディジタルカメラ集合体を構成するディジタルカメラの指向方向と焦点距離を該航空路に対応して可動式に変更可能な構造を有する航空機画像取得システムを構築した。
【発明の効果】
【0014】
以上、説明したように、本発明の路線の3次元動画生成用画像取得システムによれば、線状の形状を有する目標物に対して、実画像を用いた3次元動画生成システム用の航空写真を効率よく取得することができる。
【発明を実施するための最良の形態】
【0015】
以下、添付図面を参照しながら、本発明の路線の3次元動画生成用画像取得システムを実施するための最良の形態を詳細に説明する。図1は背景となる技術を説明するための図であり、本実施形態の「路線の3次元動画生成用画像取得システム」が「3次元景観の動画生成システム」全体構成の中で使用される位置付けを概略的に示す図である。なお、特許文献4では「3次元景観の動画生成システム」のことを「都市景観3次元動画アミューズメントシステム」と呼称しているが内容は同一のものである。特許文献4の「都市景観3次元動画アミューズメントシステム」では、空中の視点から都市景観の3次元動画生成を行うための部分と、視点が路上にある場合に3次元動画生成を行うための部分の双方について説明しているが、ここでは、視点が路上にある場合を扱わないので、空中の視点から都市景観の3次元動画生成を行うための部分と、双方に共通的なグラフィックユーザインターフェイスシステム180のみについて記載している。ユーザ191にはインターネットまたはイントラネット190を介してサービスが提供される。
【0016】
図1の空中画像データベース140、空中画像データベース143、空中3次元動画成システム160、空中画像検索エンジン165、グラフィックユーザインターフェイスシステム180は取得された航空写真を利用して3次元動画を生成しユーザ191の要求に応じて表示するシステムであり、特許文献4に内容が記載されている内容と同一である。
路線の3次元動画生成用画像取得システム110 は本発明になる部分であるが、航空機により空中で航空写真を取得するための空中画像取得システム100と構成要素の空中画像取得計画ファイル101、空中画像一次ファイル102、取得した航空写真を3次元動画生成に使いやすいように加工しデータベース化するための空中画像データベース生成登録システム120、構成要素のDEMファイル121、DGPSファイル122についても本発明で特に記載がない部分は特許文献4に記載されている内容と同一である。以下、新規性のある部分について説明を行う。
【0017】
図2では都市200の上空天球222を充分小さい立体角の範囲i221のように一定の角度で立体的に分割して、天球222を覆う地表近くを除くすべての該充分小さい立体角に対して地表のあらゆる場所の画像を準備するための空中画像取得システム100の概念を示している。 図2の隣接する該充分小さい立体角の範囲i221で撮影された同一地点に対する画像は視差のため見え方が若干異なるが、この若干異なった画像間の視界を線形変換により画像を連続的に変形させて補間し、滑らかな3次元動画を得るためのモーフィング処理を行う。
【0018】
図2により、3次元景観の動画生成システムにおける模擬飛行による模擬視界発生の概念を説明する。視点経路P(t) 270に沿って視点が時刻tとともに移動し、その間、地表を目標トラジェクトリT(t) 280に沿って視界にとらえる。該目標トラジェクトリT(t) 280は該視点経路P(t) 270上の位置から、時刻t の視線271、時刻t+δt の視線272、時刻t+2δt
の視線273、時刻t+3δt の視線 274、時刻t+4δt の視線275、および時刻t+5δt の視線276によりδtごとにとらえられた地表上の軌跡である。該視点経路P(t) 270からの該目標トラジェクトリT(t) 280に対する3次元景観の動画を生成する方法として、時刻tの視線271から時刻t+5δtの視線276に近く視差の少ない空中画像i260および空中画像i+1 261を空中画像データベース143より検索し、時刻t の視線271、時刻t+δt の視線272、および時刻t+2δt
の視線273の間は最も視線が近い空中画像i260を原画像として使用して、時刻t
の視線271、時刻t+δt の視線272、および時刻t+2δt の視線273と空中画像i260の視線の間の視点の相違による視差を空中画像i260に対するモーフィング処理で補正し、時刻t+3δt の視線 274からは空中画像i260よりも空中画像i+1 261の方が視点の相違による視差が少ないと判断して空中画像i+1 261を原画像に切り替え、時刻t+3δt の視線 274、時刻t+4δt
の視線275、時刻t+5δt の視線276と空中画像i+1 261の視線の間の視点の相違による視差を空中画像i+1 261に対するモーフィング処理で補正することにより滑らかな該目標トラジェクトリT(t)
280に沿った3次元景観の動画生成を行うのである。
【0019】
本発明になる方法は膨大な量の空中画像を必要とするが、その取得方法についての例を示したのが図3である。航空機301に図4に示すような多数のディジタルカメラを収容したディジタルカメラ集合体を搭載し、飛行経路300に沿って一定間隔ごとの撮影ポイント310で地表を撮影する。飛行経路300と撮影ポイント310を網目状に濃密に設定し、複数のディジタルカメラを搭載してディジタルカメラ集合体光軸方向320に示すように同時に多方向の画像を撮影することにより、図2に示す該充分小さい立体角の範囲i221ごとの画像を取得する。
【0020】
図4は空中画像取得システム100を構成するディジタルカメラ集合体345の構成例を示した図である。地表をあらゆる視点から効率よく高密度に撮影する目的で、直下方向のディジタルカメラ340aの周辺に水平全周方向が放射状に等間隔に分割されるように複数の斜め方向ディジタルカメラ340bから340iまでの8台を光軸が重力方向となす角が同一となるように配置してディジタルカメラ集合体345を形成したものである。とくに航空機に搭載して撮影する場合には、滞空証明を取得する必要があり、航空写真撮影用に航空機床面にあいている穴を変更したり、あるいは該床面穴から機体外にカメラが飛び出す形で利用することは事実上不可能であるため、ディジタルカメラ集合体345をCanon社製の小型または一眼レフディジタルカメラを利用して該ディジタルカメラ集合体が該航空機床面穴内に収まるよう工夫したものであり、図12、図13ないし図15に航空機床面穴への実装方法を示す。ディジタルカメラ集合体 345を構成するディジタルカメラ340a〜i以外の支持構造は、撮影方向精度が高いことを要求されるので、軽量かつ剛性の高いものであればどのようなものでもよく、ハニカム構造アルミニウム板あるいは炭素樹脂などで構成することができる。
【0021】
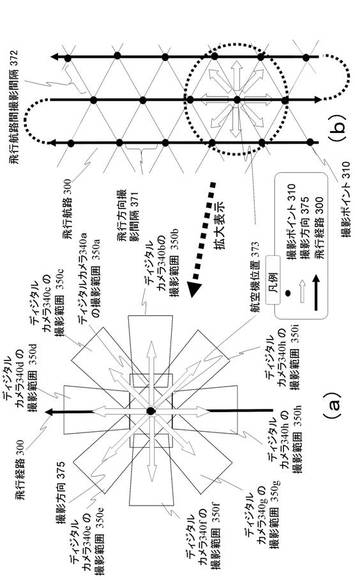
図5は、航空機による空中画像取得システムの航路および撮影ポイントの設定例を示したものである。図5(b)にて撮影ポイント310の設定例を示している。飛行経路300は空中に撮影ポイント310の網目を構成するために等間隔で平行な飛行航路300を図5(b)で点線で結んであるようにUターンしながら往復する形で飛行する。この間、撮影ポイント310で撮影を行う。撮影ポイント310の相互間隔は、飛行航路間撮影間隔372と 飛行方向撮影間隔371により規定される。ディジタルカメラ集合体345で撮影した場合、図5(a)のディジタルカメラ340a〜iの撮影範囲350a〜iで示す範囲が撮影される。飛行高度、斜め方向ディジタルカメラ340b〜iの鉛直方向となす角度、およびレンズの焦点距離の設定によって、該ディジタルカメラ340a〜iの撮影範囲350a〜iの各ディジタルカメラが撮影する範囲は、相互に若干の重複しながら地表をほぼ連続的に覆うように設定することが望ましい。以上に述べた3次元景観の動画生成システムおよび、そのための航空写真による画像取得システムは、2次元的な広がりを有する地表地域を対象とすることを前提にしており、鉄道路線、道路、河川等の線状の目標物は前提としていない。
【0022】
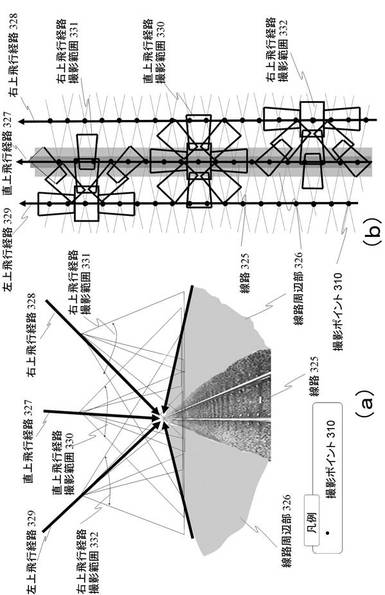
図6は該線状の目標物に対する画像取得の方法を示したものであり、図6(b)は線路325と線路周辺部326を上空から見た図である。線路325の直上には直上飛行経路327がああり、地表との一定高度を保ちながら一定間隔の撮影ポイント310で撮影を行う。線路325より左右に対称に一定距離離れて左上飛行経路329と右上飛行経路328を設定し、同様に地表との一定高度を保ちながら一定間隔の撮影ポイント310で撮影を行う。撮影ポイント310は相互に格子点を形成するようにGPS装置で位置を計測しながら撮影を行う。
【0023】
図6(a)は線路325の進行方向に図6(b)を立体的に遠近法で見た図である。右上飛行経路328よりの撮影範囲は、右上飛行経路撮影範囲 331で示され、飛行経路方向の直下および左下方を撮影する。左上飛行経路329よりの撮影範囲は、左上飛行経路撮影範囲 332で示され、飛行経路方向の直下および右下方を撮影する。直上飛行経路327からの撮影は飛行経路方向に対して左右対称の直上飛行経路撮影範囲 330である。このように飛行経路と各飛行経路からの撮影範囲を設定することにより線路325および線路周辺部326を少ない飛行経路で可能な限り多く均一な画像撮影ベクトルで覆うことが可能となる。図6では3本の飛行経路による最小の飛行経路数の例を示したが、左右に2本の飛行経路を配した5本の飛行経路も可能であり、さらに飛行経路を増やすことも可能であるが、コストとのトレードオフで決定すべき事項である。右上飛行経路撮影範囲 331、左上飛行経路撮影範囲 332、直上飛行経路撮影範囲 330の各々について真上から見た形状と各飛行経路との位置関係を図6(b)に記した。
【0024】
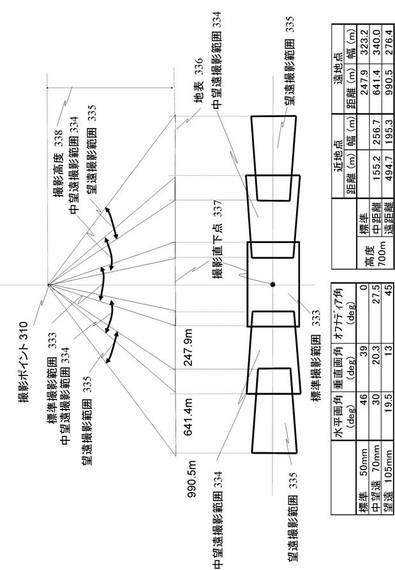
図7は地表高度700m、50mm標準レンズを直下に指向し、30mm中望遠レンズをオフナディア角27.5度、105mm望遠レンズをオフナディア角45度に設定した場合の各レンズに対応した地上の撮影範囲例を示したものである。各レンズの焦点距離の組み合わせ、オフナディア角の設定は線路325および線路周辺部326を少ない飛行経路で可能な限り多く均一な画像撮影ベクトルで覆うことを目的に設定する。図7の標準撮影範囲333、中望遠撮影範囲334、望遠撮影範囲335の配置および重複度は図4のディジタルカメラ集合体345の図6に示すディジタルカメラ340a〜iの撮影範囲、および、図8のディジタルカメラ集合体S365の図9に示すディジタルカメラ360Sa〜Siの撮影範囲設定の基礎となる数値となる。
【0025】
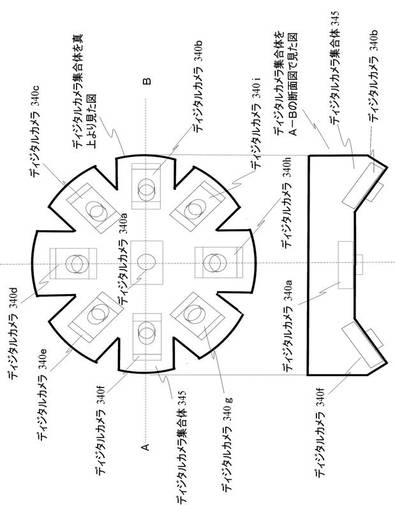
図8はディジタルカメラ集合体S365の構成例を示す図である。図6に示すように左上飛行経路329、および右上飛行経路328では撮影範囲を線路325側に指向させる必要があるため、図4の直上飛行経路327用のディジタルカメラ集合体345に対して構造の変更を行ったものである。図8の平面図において、E−F軸に沿う断面図の構造は図4のディジタルカメラ集合体345と同一であるが、C−D軸、A−B軸、G−H軸に沿う断面図の構造は図8においては左下を指向するように変更されている。ここで、ディジタルカメラ集合体S365および、ディジタルカメラ 360Sa〜Siにおける「S」は右上飛行経路用または左上飛行経路用ということで「Side」の頭文字を意味する。ディジタルカメラ集合体をA−B軸,C−D軸,G−H軸の断面図で見た図において、ディジタルカメラ360Si、ディジタルカメラ360Sb、ディジタルカメラ360Scは図4のディジタルカメラ集合体345に対比して中望遠レンズから望遠レンズに変更し、またオフナディア角も図7の内容に対応して増加してある。
【0026】
航空機床面穴367内に設置した場合に視界が遮られないようにオフナディア角の最も大きいディジタルカメラ360Si、ディジタルカメラ360Sb、ディジタルカメラ360Scを航空機床面穴367の壁面から最も遠くなるように配置してある。ディジタルカメラ360Se、ディジタルカメラ360Sf、ディジタルカメラ360Sgは中望遠レンズによる左下方向撮影用であるがE−F軸の断面図の構造に比較してカメラの指向方向を反転させた。各ディジタルカメラのレンズ選択およびオフナディア角の選定は図7の数値に基づいている。ここで最も注意すべきことは航空機床面穴367の壁面とディジタルカメラ集合体S365の位置関係により、ディジタルカメラ360の視界が航空機床面穴367の壁面で遮られることである。これを防ぐためディジタルカメラ集合体S365を航空機床面穴367へ、期待の外部にはみ出さないように最大限に吊下するよう設定した。
【0027】
図9は図8のディジタルカメラ369Sa〜Siまでによる地表でのディジタルカメラ360Sa〜Siの撮影範囲370Sa〜Siを図示したものである。図9(a)は左上飛行経路 329用の設定であり、図9(b)は右上飛行経路 328用の設定である。図9(a)、図9(b)のディジタルカメラ360Sa〜Siの撮影範囲370Sa〜Siは図8のディジタルカメラ集合体S365を水平面に沿って180度回転させることにより同一のディジタルカメラ集合体S365で実現することが可能である。
【0028】
図10は右上飛行経路328、直上飛行経路327、および左上飛行経路329に沿って各々、図5のディジタルカメラ集合体S365、図4のディジタルカメラ集合体345、および図5のディジタルカメラ集合体S365で撮影ポイント310ごとに連続的に撮影した場合の地上における画像取得範囲を示す図であり、図10(a)は左上飛行経路329に沿って得られる左側航路連続合成撮影範囲376を示し、図10(b)は直上飛行経路327に沿って得られる直上航路連続合成撮影範囲377を示し、図10(c)は右上飛行経路328に沿って得られる右側航路連続合成撮影範囲378を示したものである。
【0029】
図10(a)、(b)、(c)はそれぞれ、表示が見づらくなることを防ぐ理由で実際より撮影ポイント310の密度を1/2ないし1/4に減じてある。また、図10(a)、(b)、(c)はいずれも相互に重複しないで図示してあるが、実際は線路325および線路周辺部326を右上飛行経路328、左上飛行経路329、直上飛行経路327のいずれもが撮影範囲内に収めるよう相互の間隔を決める。飛行高度700mの例の場合、右上飛行経路328と直上飛行経路327の水平間隔および左上飛行経路329と直上飛行経路327の水平間隔を、それぞれ600から800m程度に設定することが望ましく、図11に示すように各航路連続合成撮影範囲は相互に線路325の周囲で重複し、全航路連続合成撮影範囲379として線路325に沿って空中各方向からの高密度かつ均一な画像撮影方向ベクトルを形成する。
【0030】
図12は、航空機301にデジタルカメラ集合体345、デジタルカメラ集合体S365を含むデータ取得記録システム部 390を構築し実装する方法と、フライトナビゲーションシステム部385を構築し実装する方法を示している。詳細な内容については特許文献4に記載の内容と同一でよい。図12において、航空機301には機体下方に航空写真機設置用の航空機床穴397があり、この穴にディジタルカメラ集合体345、ディジタルカメラ集合体365Sを機外に張り出さないように設置する。図12の例では安定プラットフォーム装置395により航空機床穴397に吊下する構造を採用しているが、安定プラットフォーム制御システム
394および安定プラットフォーム装置395は航空機301の姿勢に拘らずディジタルカメラ集合体345、ディジタルカメラ集合体365Sを常に地上直下に指向させ、かつ方位を規定方向に固定する機能を有するが、航空機のピッチ・ロールを常時5°以内に操縦で保てるのであれば安定プラットフォーム装置395を省略してもよい。IMU396は慣性計測装置の英語表現の頭文字であり、安定プラットフォーム装置395に乗せることによりディジタルカメラ集合体345、ディジタルカメラ集合体365Sの姿勢を計測することができる。ディジタルカメラ集合体345、ディジタルカメラ集合体S365の上面は航空機床398より上に出てもよい。
【0031】
データ取得記録システム部 390には航空機301の姿勢を観測するIMU400と、ディジタルカメラ340a〜iまたはディジタルカメラ360a〜iの制御と撮像データ処理のためのプログラムを含む空中撮影制御システム393と、画像データおよび撮影位置、撮影時ディジタルカメラ集合体345、ディジタルカメラ集合体S365の姿勢をふくむ各種データを記憶する大容量ディスク装置で構成される空中画像一次ファイル102と、ディジタルカメラ340a〜iまたはディジタルカメラ360a〜iに対する撮影指令を出すための撮影ポイントを記憶している空中画像取得計画ファイル101を機内に搭載している。航空機301の位置計測用のGPS380のアンテナを機外に有している。空中画像取得計画ファイル101、空中画像一次ファイル102、空中撮影制御システム393、フライトナビゲーションシステム 386、安定フ゜ラットフォーム制御システム394、安定フ゜ラットフォーム装置395の構成と機能については特許文献4に記載されている。
【0032】
図13は、左上飛行経路329、直上飛行経路327、右上飛行経路328の各々に対応してディジタルカメラ集合体345およびディジタルカメラ集合体S365の構成を変更することに対応してディジタルカメラ撮影システム409を構築して航空機床穴397より機体外に突出部が無いように実装した例である。図13における実装例では図12で存在した安定フ゜ラットフォーム装置395、安定フ゜ラットフォーム制御システム394、および空中撮影制御システム393内のアンテイプラットフォームに関連する処理を除外してある。図13の実装方法では、機体姿勢を水平に対して5度程度以内の偏差で保つことを前提にディジタルカメラ撮影システム 409を航空機床398に固定する方法を採用しているが、図12のように安定プラットフォーム装置を導入することも可能である。ただし、この場合、ディジタルカメラ撮影システム409の総重量がディジタルカメラ集合体345より大きくなるので安定プラットフォーム装置の重量とコストが増大する。
【0033】
図14はディジタルカメラ撮影システム409の主要部を構成するディジタルカメラ集合体回転アセンブリ405の構造と機能を示す図である。直上飛行経路327用のデジタルカメラ集合体345と右上飛行経路328および左上飛行経路329用のデジタルカメラ集合体S365をディジタルカメラ集合体結合機構401を介して相互に背面を向き合うように接続し一体化する。回転支持軸402はデジタルカメラ集合体345またはデジタルカメラ集合体S365のいずれか一方が航空機床穴397より下方を指向するようにするための回転を行うためにある。回転機構403は右上飛行経路328と左上飛行経路329でデジタルカメラ集合体S365の方向を水平面内で180度変更する必要があるので、これを実現するための回転機構で回転ベアリング機構などにより実現することが出来る。回転機構403の回転はディジタルカメラ集合体結合機構401の円筒の中心軸と回転の中心軸を共有する。ディジタルカメラ集合体回転アセンブリ405は回転支持軸402に回りを回転可能であるが、デジタルカメラ集合体345、デジタルカメラ集合体S365の外周部は対称かつ均一に回転軌跡404に内接する。
【0034】
図15はディジタルカメラ撮影システム409の構成法と航空機への実装法を示す図である。図15(a)は上方と側面から見た図面である。図14で示したディジタルカメラ集合体回転アセンブリ405はディジタルカメラ集合体回転アセンブリ支持筐体406内部にディジタルカメラ集合体回転アセンブリ405の回転支持軸402をディジタルカメラ集合体回転アセンブリ支持筐体406内部の上下移動機構407に挿入してディジタルカメラ撮影システム409を構成する。
【0035】
図15(b)はディジタルカメラ集合体回転アセンブリ支持筐体406を斜め上方より見た図であり、上方円筒部411、下方円筒部412、ディジタルカメラ集合体回転アセンブリ支持筐体固定部410、ディジタルカメラ集合体回転アセンブリ固定支持部 408、および上下移動機構407より構成される。このうち、ディジタルカメラ集合体回転アセンブリ支持筐体固定部410は円環状の平面であり、外側の円周で上方円筒部411と固着し、内側の円周で下方円筒部412と固着する。ディジタルカメラ集合体回転アセンブリ支持筐体固定部410はディジタルカメラ集合体回転アセンブリ支持筐体406およびディジタルカメラ撮影システム409を航空機床 398に固定する機能を有する。このため航空機床 398に沿って上方円筒部411の外側に延長部分を持ってもよい。下方円筒部412は航空機床穴 397に機体の外部に突出しないように収まる。
【0036】
ディジタルカメラ集合体回転アセンブリ固定支持部408は円環状の平面であり、外側の円周で下方円筒部412と固着する。ディジタルカメラ集合体回転アセンブリ固定支持部408はディジタルカメラ集合体回転アセンブリ405を上下移動機構407により、デジタルカメラ集合体345またはデジタルカメラ集合体S365のいずれかを重力方向に向けて下したとき、デジタルカメラ集合体345またはデジタルカメラ集合体S365を水平に支える機能を有する。上下移動機構407は下方でディジタルカメラ集合体回転アセンブリ405を支える機能を持つと同時に、上方にディジタルカメラ集合体回転アセンブリ405を引き上げたとき、ディジタルカメラ集合体回転アセンブリ405をその位置に保持し、回転支持軸402の回りにディジタルカメラ集合体回転アセンブリ405を回転軌跡404に沿って回転せしめ、デジタルカメラ集合体345またはデジタルカメラ集合体S365のいずれかを重力方向に向けることを可能とする。
【0037】
ディジタルカメラ集合体回転アセンブリ405が上下移動機構407の上側で保持され、回転支持軸402のまわりを回転し、デジタルカメラ集合体S365が上側を向いた位置で停止した状態で、図14で示す回転機構403を用いてデジタルカメラ集合体S365を水平面内で180度回転させることが出来る。この機能により、デジタルカメラ集合体S365を図6の右上飛行経路328および左上飛行経路 329のいずれにも適用することが出来る。
【0038】
図16は図6に比較して、より理想的に線路325および線路周辺部326の全領域に亘って、これを見込む画像光軸ベクトルが上空天球上に均一な密度で分布するための飛行経路300の設定法を示すものである。図6の場合、線路325に沿う飛行経路は3本であり、線路325に直交する面内(直交面内)での線路325を見込む画像光軸ベクトルは約45度に1本であり3本しかない。このため該直交面内での線路325に対する俯角方向の視点の動きに対して滑らかな画像を生成することが困難である。図6の航路設定は、線路325の進行方向に対しては撮影ポイント310が稠密に存在するため線路に直交する構造物に対する滑らかな動画生成が可能であり、また線路325の斜め上空から線路325または線路周辺部326に沿った視点、視線の変化に対して滑らかな動画生成が可能である。ここで論じているのは線路325の直交面内での線路325に対する俯角方向の視点の動きに対してのみ滑らかさが欠けるということである.
【0039】
この問題を解決するためには図16に示すように線路325および線路周辺部326に沿って該上空を半楕円チューブ423で覆い、該半楕円チューブ上を線路325に沿う形で飛行経路300を複数設定すればよい。図16は線路325に直交する平面での断面を示している。図16は飛行経路300が13本ある例であるが、線路325に直交する面内(直交面内)での線路325を見込む画像光軸ベクトルは焼く120度にわたって13本存在し、約10度ごとに1本存在する。飛行経路300の数は費用対コストの見地から増減させるのが望ましい。撮影ポイント310は各飛行経路300に沿って一定間隔ごとに設定される。各飛行経路300から線路325および線路周辺部326を見込む角度は、最左端の飛行経路300から最右端の飛行経路300に向けて、最左端航路の撮影範囲角420、直上航路の撮影範囲角421、さらに最右端航路の撮影範囲角422となるが、これらの角度はほぼ同一となるようにディジタルカメラ集合体の望遠レンズの焦点距離と各ディジタルカメラの指向方向を設定する。
【0040】
図17は図16に示される飛行経路300にに対応した撮影を行うためのディジタルカメラ集合体345の構成例であり、各ディジタルカメラ340a〜iに対してディジタルカメラ指向方向変更機構425を設け、各ディジタルカメラの指向方向を変更可能とした。ズームレンズの焦点距離を計算機指令により外部から変更可能なディジタルカメラが現時点で実用化、市販されており、計算機指令で変更可能である。ディジタルカメラ指向方向変更機構425に対して計算機指令で個別に指向方向を変更すれば、焦点距離の変更とあわせて図16に示す撮影計画を実施することが出来る。図17のディジタルカメラ集合体345は図12または図13の航空機に実装することが出来る。
【0041】
図13におけるディジタルカメラ集合体345、デジタルカメラ集合体S365の実装方法、および図15におけるディジタルカメラ撮影システム409の実装方法では、安定フ゜ラットフォーム装置を用いない。このため航空機301の姿勢の擾乱により、ディジタルカメラ集合体345およびデジタルカメラ集合体S365の直下方向指向のディジタルカメラ340a、360aは撮影ポイント310の直下点を指向しないでずれが生じる。この結果、図18に示すように直上航路撮影ポイントnの直下視カメラ撮影範囲430、直上航路撮影ポイントn+1の直下視カメラ撮影範囲431以降、直上航路撮影ポイントn+kの直下視カメラ撮影範囲432まで図18(b)に示すようにずれながら重複することになる。
【0042】
特許文献4にある実画像を用いた3次元動画生成システムにあっては、各画像の撮影位置、撮影方向、光軸周りの回転角等の正確なメタデータが必要である。このため、直上航路撮影ポイントnの直下視カメラ撮影範囲430と、これと離れた位置にある直上航路撮影ポイントn+kの直下視カメラ撮影範囲432について、画像内の目標点を4箇所以上、地図又は高分解能オルソ衛星画像により位置、標高を求め、画像メタデータを逆算して求める。直上航路撮影ポイントnの直下視カメラ撮影範囲430と直上航路撮影ポイントn+kの直下視カメラ撮影範囲432の間の画像については重複部分のタイポイントである撮影ポイントn,n+1間タイポイント群433、撮影ポイントn+1,n+2間タイポイント群434を順次、撮影ポイントn+k−1,n+k間タイポイント群435まで求めて行き、中間の画像のメタデータを求める。この方法は、特許文献5および特許文献6に記載されている。
【産業上の利用可能性】
【0043】
本発明の航空写真画像取得システムは、航空機に搭載されるカメラの制御装置及び撮像装置として産業上利用することができる。また、線路に限らず線状の構造を持つ、高速道路、道路、河川、送電線、パイプラインなどの地表の地物の3次元的情報を得る目的で実画像を取得し画像データベースを構築することに利用できる。
【図面の簡単な説明】
【0044】
【図1】本発明の路線の3次元動画生成用画像取得システムの構成と3次元景観の動画生成システム全体構成の中で使用される位置付けを概略的に示す図である。
【図2】図1に示す3次元景観の動画生成システムにおける空中画像取得と実画像を用いたモーフィングによる動画像生成の概念について説明する図である。
【図3】図1に示す3次元景観の動画生成システムにおける空中画像取得の概念を示す図である。
【図4】本発明の航空機搭載ディジタルカメラ集合体の例について説明する図である。
【図5】本発明の航空機による空中画像取得システムの航路および撮影ポイントの設定例を示す図である。
【図6】本発明の航空機による線状目標物に対する空中画像取得システムの航路および撮影ポイントの設定例を示す図である。
【図7】本発明の航空機搭載ディジタルカメラ集合体のカメラ毎の撮影範囲の例を示す図である。
【図8】本発明の線状目標物に特化した航空機搭載ディジタルカメラ集合体の例について説明する図である。
【図9】本発明の線状目標物に特化した航空機搭載ディジタルカメラ集合体のカメラ毎の撮影範囲の例を示す図である。
【図10】本発明の線状目標物に特化した航空機搭載ディジタルカメラ集合体の各飛行航路に沿った連続的な撮影範囲の例を示す図である。
【図11】本発明の線状目標物に特化した航空機搭載ディジタルカメラ集合体の各飛行航路に沿った連続的な撮影範囲の例を全て重畳して示す図である。
【図12】本発明の航空機による空中画像取得システムの構成例を示す図である。
【図13】本発明の航空機による空中画像取得システムのもう一つの構成例を示す図である。
【図14】本発明の線状目標物に特化して各航路に対応可能な航空機搭載ディジタルカメラ集合体回転アセンブリの構造例を示す図である。
【図15】本発明の線状目標物に特化して各航路に対応可能な航空機搭載ディジタルカメラ撮影システムの構造例と航空機への搭載方法を示す図である。
【図16】本発明の線状目標物に特化した理想的な航空機航路設定法と各航路に対する撮影範囲角の構成法を示す図である。
【図17】本発明の航空機搭載ディジタルカメラ集合体のもうひとつの例について説明する図である。
【図18】本発明の空中画像取得システムにおける画像メタデータの精度向上方法を示す図である。
【符号の説明】
【0045】
100 空中画像取得システム
101 空中画像取得計画ファイル
102 空中画像一次ファイル
110 路線の3次元動画生成用画像取得システム
120 空中画像データベース生成登録システム
121 DEMファイル
122 DGPSファイル
123 オルソ衛星画像ファイル
124 地図ファイル
140 空中画像データベース
142 空中画像インデクス機構
143 空中画像データベース
160 空中3次元動画生成システム
165 空中画像検索エンジン
180 グラフィックユーザインターフェイスシステム
190 インターネットまたはイントラネット
191 ユーザ
200 都市
210 視線
221 充分小さい立体角の範囲
i
222 天球
260 空中画像
i
261 空中画像
i+1
270 視点経路 P(t)
271 時刻
t の視線
272 時刻
t+δt の視線
273 時刻
t+2δt の視線
274 時刻
t+3δt の視線
275 時刻
t+4δt の視線
276 時刻
t+5δt の視線
280 目標トラジェクトリ T(t)
300 飛行経路
301 航空機
310 撮影ポイント
320 ディジタルカメラ集合体光軸方向
325 線路
326 線路周辺部
327 直上飛行経路
328 右上飛行経路
329 左上飛行経路
330 直上飛行経路撮影範囲
331 右上飛行経路撮影範囲
332 右上飛行経路撮影範囲
333 標準撮影範囲
334 中望遠撮影範囲
335 望遠撮影範囲
336 地表
337 撮影直下点
338 撮影高度
340a〜i ディジタルカメラ
345 ディジタルカメラ集合体
350a〜i ディジタルカメラ340a〜iの撮影範囲
360Sa〜Si ディジタルカメラ
365 ディジタルカメラ集合体S
370Sa〜Si ディジタルカメラ360Sa〜Siの撮影範囲
371 飛行方向撮影間隔
372 飛行航路間撮影間隔
373 航空機位置
375 撮影方向
376 左側航路連続合成撮影範囲
377 直上航路連続合成撮影範囲
378 右側航路連続合成撮影範囲
379 全航路連続合成撮影範囲
380 GPSアンテナ
385 フライトナビゲーションシステム部
386 フライトナビゲーションシステム
387 アビオニクス情報
388 航空計装
390 データ取得記録システム部
393 空中撮影制御システム
394 安定プラットフォーム制御システム
395 安定プラットフォーム装置
396 IMU
397 航空機床穴
398 航空機床
400 IMU
401 ディジタルカメラ集合体結合機構
402 回転支持軸
403 回転機構
404 回転軌跡
405 ディジタルカメラ集合体回転アセンブリ
406 ディジタルカメラ集合体回転アセンブリ支持筐体
407 上下移動機構
408
ディジタルカメラ集合体回転アセンブリ固定支持部
409
ディジタルカメラ撮影システム
410 ディジタルカメラ集合体回転アセンブリ支持筐体固定部
411 上方円筒部
412 下方円筒部
420 最左端航路の撮影範囲角
421 直上航路の撮影範囲角
422 最右端航路の撮影範囲角
423 半楕円チューブ
425 ディジタルカメラ指向方向変更機構
430 直上航路撮影ポイントnの直下視カメラ撮影範囲
431 直上航路撮影ポイントn+1の直下視カメラ撮影範囲
432 直上航路撮影ポイントn+kの直下視カメラ撮影範囲
433 撮影ポイントn,n+1間タイポイント群
434 撮影ポイントn+1,n+2間タイポイント群
435 撮影ポイントn+k−1,n+k間タイポイント群
【特許請求の範囲】
【請求項1】
上空から撮影した実画像を利用する地上景観3次元動画生成システムにおいて、線状の目標物およびその周辺部の景観に特化して該実画像の画像データベースを取得するために、該線状の目標物の線および周辺部に沿って該直上空および該上空の片側または両側に並行する単数または複数の斜め上空の飛行経路より一定間隔ごとに格子点を成すように複数の方向を同時撮影し、特に該線状目標物およびその両側周辺部の任意の点について、該上空の各方位方向およびある一定値以上の各仰角方向から均等に撮影した画像を取得することを特徴とする画像データベース取得システム。
【請求項2】
請求項1の画像データベース取得システムにおいて、重力方向のみならず複数方向の斜め方向を撮影し蓄積することができるように複数の航空機搭載ディジタルカメラでディジタルカメラ集合体を構成し、該複数方向の斜め方向ディジタルカメラを該レンズの光軸が重力方向となす角が同一で、かつ水平全周方向が放射状に分割されるように配設し、重力方向よりなす角に応じて焦点距離の長い望遠レンズを用いることにより、俯角の小さい画像の分解能低下を防止し、とくに該航空撮影用航空機の床面の撮影用円筒状開口部に機外に突起物が出ないように配設することを特徴とするディジタルカメラ集合体で該線状の目標物の線に沿った直上の上空の該撮影点より撮影することを特徴とする画像データベース取得システム。
【請求項3】
請求項1の画像データベース取得システムにおいて、重力方向のみならず複数方向の斜め方向を撮影し蓄積することができるように複数の航空機搭載ディジタルカメラでディジタルカメラ集合体を構成し、該線状の目標物の線に沿った斜め上空の該飛行経路より該線状目標物の方向に撮影範囲を指向させる目的で該ディジタルカメラ集合体におけるディジタルカメラを飛行水平面に対して飛行経路の前後を含む左側ないし右側の該線状目標物の存在する側に放射状に配設し、さらに重力方向よりなす角に応じて焦点距離の長い望遠レンズを用いることにより、俯角の小さい画像の分解能低下を防止し、とくに該航空撮影用航空機の床面の撮影用円筒状開口部に機外に突起物が出ないように配設することを特徴とするディジタルカメラ集合体を用いることを特徴とする画像データベース取得システム。
【請求項4】
請求項3の画像データベース取得システムにおいて、飛行方向に対して該線状目標物が左下に有る場合と、右下に有る場合に対して、同一のディジタルカメラ集合体を水平面内で180度回転させることにより、該線状目標物を常にディジタルカメラ集合体の斜め下方向の視野に収めることが可能となる構造を有する事を特徴とする画像データベース取得システム。
【請求項5】
請求項1から請求項4の画像データベース取得システムにおいて、該線状目標物の直上より撮影する場合には請求項2の構造を有するディジタルカメラ集合体を該航空撮影用航空機の床面の撮影用円筒状開口部に機外に突起物が出ないように配設し、該線状目標物を飛行方向の左下方または右下方に見て撮影する場合には請求項3および請求項4の構造を有するディジタルカメラ集合体を該航空撮影用航空機の床面の撮影用円筒状開口部に機外に突起物が出ないように配設することが可能となる構造を有する事を特徴とする画像データベース取得システム。
【請求項6】
請求項1の画像データベース取得システムにおいて、該線状の目標物および該周辺部に沿って該上空に、該線状の目標物および該周辺部を中心とする半楕円筒チューブを想定し、該半楕円筒チューブ上を該線状の目標物および該周辺部に並行するよう複数の飛行経路を設定し、該半楕円筒チューブと直交する平面内で該飛行経路から該線状の目標物および該周辺部を見込む視野角および俯角の分布が均一になるように該ディジタルカメラ集合体における各ディジタルカメラの光軸方向と焦点距離を設定することを特徴とする画像データベース取得システム。
【請求項7】
請求項6の画像データベース取得システムにおいて、請求項2から請求項5のディジタルカメラ集合体の各ディジタルカメラに対して画像撮影光軸を変更可能なディジタルカメラ指向方向変更機構を設け、該飛行経路と該線状の目標物および該周辺部の相対位置関係により請求項6の目的を実現するために、該各ディジタルカメラの光軸指向方向と商店距離を変更可能な構造を有することを特徴とする画像データベース取得システム。
【請求項1】
上空から撮影した実画像を利用する地上景観3次元動画生成システムにおいて、線状の目標物およびその周辺部の景観に特化して該実画像の画像データベースを取得するために、該線状の目標物の線および周辺部に沿って該直上空および該上空の片側または両側に並行する単数または複数の斜め上空の飛行経路より一定間隔ごとに格子点を成すように複数の方向を同時撮影し、特に該線状目標物およびその両側周辺部の任意の点について、該上空の各方位方向およびある一定値以上の各仰角方向から均等に撮影した画像を取得することを特徴とする画像データベース取得システム。
【請求項2】
請求項1の画像データベース取得システムにおいて、重力方向のみならず複数方向の斜め方向を撮影し蓄積することができるように複数の航空機搭載ディジタルカメラでディジタルカメラ集合体を構成し、該複数方向の斜め方向ディジタルカメラを該レンズの光軸が重力方向となす角が同一で、かつ水平全周方向が放射状に分割されるように配設し、重力方向よりなす角に応じて焦点距離の長い望遠レンズを用いることにより、俯角の小さい画像の分解能低下を防止し、とくに該航空撮影用航空機の床面の撮影用円筒状開口部に機外に突起物が出ないように配設することを特徴とするディジタルカメラ集合体で該線状の目標物の線に沿った直上の上空の該撮影点より撮影することを特徴とする画像データベース取得システム。
【請求項3】
請求項1の画像データベース取得システムにおいて、重力方向のみならず複数方向の斜め方向を撮影し蓄積することができるように複数の航空機搭載ディジタルカメラでディジタルカメラ集合体を構成し、該線状の目標物の線に沿った斜め上空の該飛行経路より該線状目標物の方向に撮影範囲を指向させる目的で該ディジタルカメラ集合体におけるディジタルカメラを飛行水平面に対して飛行経路の前後を含む左側ないし右側の該線状目標物の存在する側に放射状に配設し、さらに重力方向よりなす角に応じて焦点距離の長い望遠レンズを用いることにより、俯角の小さい画像の分解能低下を防止し、とくに該航空撮影用航空機の床面の撮影用円筒状開口部に機外に突起物が出ないように配設することを特徴とするディジタルカメラ集合体を用いることを特徴とする画像データベース取得システム。
【請求項4】
請求項3の画像データベース取得システムにおいて、飛行方向に対して該線状目標物が左下に有る場合と、右下に有る場合に対して、同一のディジタルカメラ集合体を水平面内で180度回転させることにより、該線状目標物を常にディジタルカメラ集合体の斜め下方向の視野に収めることが可能となる構造を有する事を特徴とする画像データベース取得システム。
【請求項5】
請求項1から請求項4の画像データベース取得システムにおいて、該線状目標物の直上より撮影する場合には請求項2の構造を有するディジタルカメラ集合体を該航空撮影用航空機の床面の撮影用円筒状開口部に機外に突起物が出ないように配設し、該線状目標物を飛行方向の左下方または右下方に見て撮影する場合には請求項3および請求項4の構造を有するディジタルカメラ集合体を該航空撮影用航空機の床面の撮影用円筒状開口部に機外に突起物が出ないように配設することが可能となる構造を有する事を特徴とする画像データベース取得システム。
【請求項6】
請求項1の画像データベース取得システムにおいて、該線状の目標物および該周辺部に沿って該上空に、該線状の目標物および該周辺部を中心とする半楕円筒チューブを想定し、該半楕円筒チューブ上を該線状の目標物および該周辺部に並行するよう複数の飛行経路を設定し、該半楕円筒チューブと直交する平面内で該飛行経路から該線状の目標物および該周辺部を見込む視野角および俯角の分布が均一になるように該ディジタルカメラ集合体における各ディジタルカメラの光軸方向と焦点距離を設定することを特徴とする画像データベース取得システム。
【請求項7】
請求項6の画像データベース取得システムにおいて、請求項2から請求項5のディジタルカメラ集合体の各ディジタルカメラに対して画像撮影光軸を変更可能なディジタルカメラ指向方向変更機構を設け、該飛行経路と該線状の目標物および該周辺部の相対位置関係により請求項6の目的を実現するために、該各ディジタルカメラの光軸指向方向と商店距離を変更可能な構造を有することを特徴とする画像データベース取得システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2010−45693(P2010−45693A)
【公開日】平成22年2月25日(2010.2.25)
【国際特許分類】
【出願番号】特願2008−209398(P2008−209398)
【出願日】平成20年8月17日(2008.8.17)
【出願人】(708002816)小平アソシエイツ株式会社 (7)
【Fターム(参考)】
【公開日】平成22年2月25日(2010.2.25)
【国際特許分類】
【出願日】平成20年8月17日(2008.8.17)
【出願人】(708002816)小平アソシエイツ株式会社 (7)
【Fターム(参考)】
[ Back to top ]