
路車間通信システム
【課題】路車間通信システムにおいて、路側通信装置から車両への情報送信が成立する可能性を可及的に高くするための技術を提供する。
【解決手段】通信装置を備える車両と、サービス提供エリアの車両と情報の送受信を行うことが可能な路側通信装置とを含む路車間通信システムであって、路側通信装置は、情報送信時の指向性、出力強度および変調方式のうちいずれか1つ以上を制御して情報送信エリアを制御する送信制御部と、車両の位置情報と移動情報とを含む車両情報を取得する情報取得部と、前記車両情報を利用して個別に情報を提供すべき車両の有無および位置を判断する判断部とを備え、前記送信制御部は、個別に情報を提供するべきと前記判断部によって判断された車両がある場合は、全域への情報送信に加えて、当該車両に特に情報送信するような路車間通信システムを用いる。
【解決手段】通信装置を備える車両と、サービス提供エリアの車両と情報の送受信を行うことが可能な路側通信装置とを含む路車間通信システムであって、路側通信装置は、情報送信時の指向性、出力強度および変調方式のうちいずれか1つ以上を制御して情報送信エリアを制御する送信制御部と、車両の位置情報と移動情報とを含む車両情報を取得する情報取得部と、前記車両情報を利用して個別に情報を提供すべき車両の有無および位置を判断する判断部とを備え、前記送信制御部は、個別に情報を提供するべきと前記判断部によって判断された車両がある場合は、全域への情報送信に加えて、当該車両に特に情報送信するような路車間通信システムを用いる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、通信装置を備える車両と路側通信装置を含む路車間通信システムに関する。
【背景技術】
【0002】
通常、路車間通信システムの路側通信装置は、サービス提供エリア内の車両に対して、乗員による運転操作や自律的な運転制御に必要な情報を、操作や制御に間に合うような適切なタイミングで提供できるよう構成されている。例えば、路側通信装置が安全運転の役に立つ情報を送信し、その情報を受信した車両が自律的あるいは乗員の操作に従って動作することで安全運転を実現する、といったように行われる。このように適切な情報提供を行うために、路側通信装置はサービス提供エリア内の状況を把握し、提供する情報の内容を決定し、実際に情報を送信する。そして車両は情報を受信する。
【0003】
路車間通信システムの路側通信装置が情報を取得する際にも、情報を送信する際にも、実際の通信は路側通信装置のアンテナと車載の通信装置の間で、電波ビーコン等の無線装置を用いて行われることが多い。そのため路車間通信システムが機能を発揮するためには、サービス提供エリア内の車両と路側通信装置との間で、通信の成立を確保する必要がある。
【0004】
特開2007−306273号公報(特許文献1)では、路側通信装置が道路上の車両の位置情報を取得し、その位置情報に基づいて通信が成立しているゾーンを推定する。そして通信成立ゾーンが設計値とは異なる場合、アンテナの指向性を制御して通信品質を保つようになっている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−306273号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1の技術では、1カ所の路側通信装置でできるだけ広い範囲をカバーしサービスを提供しようとすると、通信エリア内に複数台の車両が存在することになる。すると路側通信装置は分布全域の通信品質を保つように動作するため、局所的に通信品質が悪くなることが考えられる。
【0007】
特許文献1の技術では、路側通信装置は基本的にサービス提供エリア全域に情報を送信しようとする。しかし実際の交通状況においては、サービス提供エリア内の特定の車両に対して情報を送信することが望ましい場面が生じ得る。例えば、サービス提供エリア全域に情報を送信した時に、ある車両と路側通信装置の間に車高の高い別の車両が入って電波が遮蔽され、通信ができなくなることがある。このような場合、再度の情報送信は遮蔽された車両だけに行えば充分である。また、再度の情報送信の時点でも依然としてその車両が遮蔽されていたとすると、同じ方法で再送したとしても通信は成立しない。
【0008】
また、特定の車両に対して情報を送信すべき別の例として、交通状況から見て危険な状態にある車両に対して、乗員の操作や自律的な制御を促すために、情報を提供するような場合が考えられる。このような安全にかかわる情報については確実に車両に届ける必要があるが、路側通信装置がサービス提供エリア全域に情報送信すると、前述したように局所的に通信品質が悪くなりかねないため、通信が成立しない恐れがある。
【0009】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、路車間通信システムにおいて、路側通信装置から車両への情報送信が成立する可能性を高くするための技術を提供することである。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明にかかる路車間通信システムでは以下の構成を採用する。すなわち、通信装置を備える車両と、道路上の所定の範囲であるサービス提供エリアに存在する車両と情報の送受信を行うことが可能な路側通信装置とを含む路車間通信システムであって、前記路側通信装置は、情報送信時の指向性、出力強度および変調方式のうちいずれか1つ以上を制御することにより、サービス提供エリア内で実際に情報送信する範囲である情報送信エリアを制御する送信制御部と、車両の位置情報と移動情報とを含む車両情報を取得する情報取得部と、前記車両情報を利用して個別に情報を提供すべき車両の有無および位置を判断する判断部とを備え、前記送信制御部は、個別に情報を提供するべきと前記判断部によって判断された車両がある場合、サービス提供エリアの全域を情報送信エリアとした情報送信に加えて、当該車両の近傍領域を情報送信エリアとして情報送信することを特徴とする路車間通信システムである。
【0011】
通常の路車間通信システムの路側通信装置は、サービス提供エリア内の状況を把握し、提供する情報を決定し、実際に情報を送信する。本発明では、通常の路車間通信システムでも行われるサービス提供エリア全体への情報送信に加え、個別の車両に対する情報送信の必要性を判断した上で、実際に情報送信を行う。そこで、本発明の各構成要素がどのような役割を果たして路車間通信システムの機能が実現されているか、以下に説明する。
【0012】
まず、路側通信装置の情報取得部が、種々の情報を取得してサービス提供エリア内の状況を把握する方法について述べる。取得する情報の種類は、必須の情報として車両情報があり、それに加えて交通情報を取得することが好ましい。車両情報とは、サービス提供エリア内の各車両に関する情報であり、車両の位置情報と移動情報を含む。路側通信装置の情報取得部は、各車両の車載通信装置と通信を行い、車両情報を取得する。このように車両ごとの情報を取得することによって、各車両の状況を正確に把握できるので、個別の車両に情報を提供するかどうかの判断を行うための材料を得ることができる。
【0013】
なお、車両情報のうち位置情報とは、車両の現在の位置を特定する情報である。また、移動情報とは、車両の速さ、進行方向、運転者による方向指示器操作など、車両の現在の移動状況の把握や、将来的な移動状況の予測に用いられる情報である。交通情報とは、サービス提供エリア内の交通状況を指す。
【0014】
次に、路側通信装置の判断部が行う判断について述べる。判断内容は、サービス提供エリアの全域に対する情報送信に加えて、個別に情報を提供するべき車両が存在するか、および、存在する場合はどのような情報を提供するかである。路側通信装置の判断部は、情報取得部から情報を受け取ると、各車両の車両情報に基づき、現在のサービス提供エリア内の車両分布や相対的な位置・速度の関係を把握し、または、近い将来における車両分布を予測する。そして、各車両について、情報を提供する条件に当てはまるかどうかをチェックする。判断部は、好ましくは、車両情報に加えて交通情報を利用して、判断の精度を向上させると良い。このように、判断部は、サービス提供エリア内の車両から取得した情報を利用するので、遅れがなく正確な車両分布の把握または予測を行うことができる。そして、正確な車両分布に基づいて判断を行うので、情報を個別に提供する対象を的確に見出すことができる。
【0015】
次に、路側通信装置の送信制御部が行う制御について説明する。送信制御部は、送信の
際の指向性、出力強度および変調方式のうちいずれか1つ以上を制御することによって、実際に情報が送信される範囲(以降、情報送信エリア)を制御する。送信制御部は、情報送信エリアをサービス提供エリアと同じ範囲とすることにより、サービス提供エリア全域に情報を送信することができる。また、送信制御部は、情報送信エリアを特定の車両の周辺の範囲とすることにより、個別の車両に情報を送信することができる。このように、個別の車両の周辺を情報送信エリアとして集中的に情報送信することにより、通信が成立する可能性を高めることができるようになる。
【0016】
次に、通信装置を備える車両の動作について説明する。各車両は、自身の車両情報を路側通信装置に送る。また、路側通信装置が提供した情報を受信すると、その情報を利用して運転者が運転操作をしたり、車両が自律的に動作を行うことによって、利便性や安全性の向上などの効果が得られる。
【0017】
本発明の第1の好ましい例では、前記判断部は、前記車両情報を利用して、サービス提供エリアに存在するものの他の車両により電波が遮蔽されているか、または、近い将来遮蔽される車両があるかどうかを判断し、該当する車両がある場合は、当該車両に個別に情報を提供すべきと判断する。
【0018】
このような第1の好ましい例において、路側通信装置の判断部が行う判断について説明する。判断部は、ある車両に向けて路側通信装置から送信された電波が、他の車両によって遮蔽されているか、あるいは近い将来遮蔽されるかを判断する。現在遮蔽されている車両に対しては、送信できなかった情報を再送信する必要があるが、当該車両と他の車両との位置関係が変わらなければ、再送信したとしても引き続き電波が遮蔽されてしまう。また、遮蔽されると予測される車両に対しては、通常行われるサービス提供エリア全域への情報送信を行ったところで通信が成立せず、情報を提供できない。
【0019】
そこで、遮蔽された車両への情報の再送信、または遮蔽されると予測される車両への情報送信においては、送信制御部が出力強度、指向性や変調方式を制御し、車両側の受信率を向上させて通信が成立しやすくする。出力強度の制御の例として、送信時の出力の強度を上げて、帯域あたりの送信電力を大きくして、回折波を増大させ車両に電波が届くようにすることができる。また、指向性の制御の例として、送信時の指向性を高めて対象車両にスポット的に情報を送信することができる。また、変調方式の制御の例として、送信時の変調方式を復調しやすいものに変更することができる。また、これらの制御のうち2種類を選んで組み合わせたり、3種類とも組み合わせたりすることもできる。このように、判断部が遮蔽状態について判断し、送信制御部が判断結果に従って個別に情報送信を行うことにより、車両との通信を成立させ、必要な情報を的確に届けることができる。
【0020】
本発明の第2の好ましい例では、前記判断部は、前記車両情報を利用して、それぞれの車両について危険な状態にあるかどうかを判断し、危険な状態の車両があれば、当該車両に個別に情報を提供すべきと判断する。
【0021】
このような第2の好ましい例において、路側通信装置の判断部が行う判断について説明する。この例で判断部は、各車両について、交通状況や予測される車両分布から見て危険な状態であるかどうかを判断する。もしも危険な状態にあれば、車両の乗員に対して注意を喚起したり、車両の自律的な危険回避動作を促したりするために、個別に情報を提供するべきと判断する。そして、送信制御部は、送信出力や指向性の調節により、個別の車両に対して情報送信が行われるように制御する。このように、判断部が個別の車両について危険状態かどうかを判断し、送信制御部が判断結果に従って情報送信を制御することにより、運転を支援する必要がある車両との通信を成立させ、必要な情報を的確に届けることができる。
【発明の効果】
【0022】
本発明によれば、路車間通信システムにおいて、路側通信装置から車両への情報送信が成立する可能性を高くすることができるようになる。
【図面の簡単な説明】
【0023】
【図1】本発明の路車間通信システムの構成を示すブロック図である。
【図2】路車間通信システムに含まれる車両が定期的に行う処理を示すフローチャートである。
【図3】各実施例におけるサービス提供エリアの状況を示す平面図である。
【図4】実施例1で路側通信装置が行う処理を示すフローチャートである。
【図5】図5(a)は電波が遮蔽される状況を説明するための概念図、図5(b)は遮蔽される場合の模式図、図5(c)は遮蔽されない場合の模式図である。
【図6】実施例2で路側通信装置が行う処理を示すフローチャートである。
【図7】実施例3で路側通信装置が行う処理を示すフローチャートである。
【発明を実施するための形態】
【0024】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0025】
(路車間通信システムの構成)
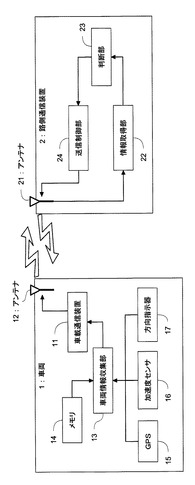
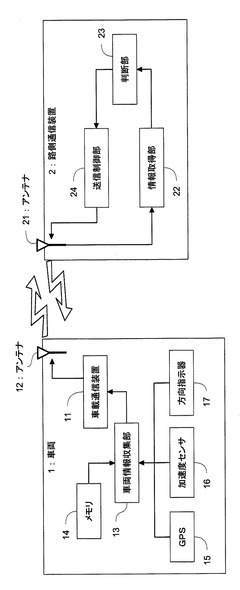
図1のブロック図に路車間通信システムの構成を示す。車両1は、車載通信装置11とアンテナ12を備えており、車載通信装置11を用いてアンテナ12を制御して、情報の送受信を行う。車両1は、さらに、車両情報収集部13、メモリ14、GPS15、加速度センサ16、および、方向指示器17を備えている。メモリ14には、車両自身の車高が格納されている。GPS15は、衛星測位システムの端末であり、GPS衛星から信号を受信して現在位置を検出する。加速度センサ16は、車両の速さと進行方向を検出する。方向指示器17は、運転者の操作に従って点灯状態になる。車両情報収集部13は、メモリ14から読み出した車高、GPS15が検出した現在位置、加速度センサ16が検出した速さと進行方向、および、方向指示器17から得た方向指示を、車両情報としてまとめ、車載通信装置11に出力する。
【0026】
なお、電波状況によってはGPSによる測位の信頼性が低いことがある。そのような場合、信頼性が高かった時のGPS検出結果からの変位を車両の速度や進行方向によって補強し、現在位置を検出しても良い。また、車両情報として車高を直接送信するのではなく、自車の車種情報を送信しても良い。その場合、路側通信装置の方で車種に基づいて車高を調べるようにすれば、車高を直接送信するのと同様の処理を行うことができる。
【0027】
路側通信装置2は、アンテナ21、情報取得部22、判断部23、および、送信制御部24を備えている。アンテナ21としては指向性アンテナを好ましく利用でき、例えばアレイアンテナを用いて素子ごとに電波の位相を制御することによって、アンテナからの電波の出力方向や強度を調節することができる。情報取得部22は、アンテナ21を用いて車両情報を受信する。判断部23は、情報取得部22が取得した各車両の車両情報から車両分布を把握し、好ましくは交通情報も取得した上で、情報提供の対象や内容にかかわる判断を行う。送信制御部24はアンテナ21を制御して情報を送信し、その際には情報送信エリアの制御を行う。送信制御部24が行う制御としては、上記アンテナ21の指向性を制御することの他に、無線機の出力強度を上げることにより、帯域あたりの送信電力を大きくして、車両側の受信率を向上させることができる。あるいは、情報を送信する際に、送信電力は同じにしたまま、送信に使用する周波数帯域を広帯域から狭帯域に変更することにより、帯域当たりの電力量を大きくして、受信率を向上させることができる。さらに、アンテナ21から情報を送信する際の変調方式を、復調しやすいものに変更すること
により、受信率を向上させることが可能である。
【0028】
なお、上記情報取得部は、車両情報に加えて交通情報を取得して判断部に出力するようにしてもよい。その場合判断部は両方の情報を利用して判断を行う。交通情報とはサービス提供エリア内の交通状況を指し、例えば信号の点灯状態、一時停止や通行止めといった交通規制に関する情報、路面状態などがある。情報取得部は、これら交通情報を、例えば外部との通信によって取得することができる。すなわち、不図示の信号機と通信を行うことによる点灯状況の取得や、VICS(財団法人道路交通情報通信システムセンターの商標)から情報提供を受けることなどである。あるいは、カメラ等を用いてサービス提供エリアの様子を撮影するによっても交通情報や、車両情報を取得可能である。
【0029】
図2のフローチャートを用いて、路車間通信システムのうち車両側の動作について補足説明する。この動作は、各実施例に共通するものである。車両は動作している間、本フローの処理を定期的に(例えば100msecに1回)繰り返す。ステップS201で、車両情報収集部が車両情報を収集し、車載通信装置がアンテナを制御して、その車両情報を送信する。ステップS202で、車載通信装置は、路側通信装置から提供された情報を受信する。ステップS203で、車両は提供情報に応じて取るべきアクションを実行する。
【0030】
<実施例1>
本実施例では、路側通信装置が、近い将来に遮蔽されると予測される車両がある場合、サービス提供エリア全域への送信とは別に、その遮蔽される車両に個別に情報送信する例を説明する。
【0031】
図3は、ある交差点周辺の簡略化した平面図である。この交差点には4つの路側通信装置A〜Dが設置されている。それぞれの路側通信装置は、図中の領域(A)〜(D)をカバーし、サービス提供エリアとしている。いま、エリア(A)の右寄りの地点で事故が発生し、通行できない状態になっている。そこで路側通信装置Aがエリア(A)の車両に情報を送信して通行止めであることを通知する。
【0032】
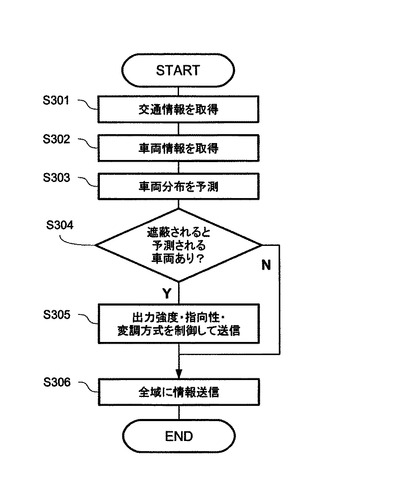
図4のフローチャートを用いて、本実施例の路車間通信システムの路側通信装置の動作を説明する。
ステップS301で、路側通信装置の情報取得部は、エリア(A)の交通情報を取得する。ここでは、カメラでエリア(A)を撮影した画像を解析し、車線Aleftで衝突事故が発生して通行できないという交通情報を得る。
ステップS302で、路側通信装置の情報取得部は、エリア(A)の各車両と通信を行って車両情報を取得する。ここでは、車線Aleftを走行中の、乗用車である車両A01とトラックである車両A02の、計2台の車両情報が得られる。車両A02の車高は車両A01よりも相当程度高いものとする。なお、事故を起こした当事者の車両の通信装置が稼働している状態であれば、その車載通信装置から受信した車両情報に基づいて、通行止めであるという交通情報を得ることもできる。
ステップS303で、路側通信装置の判断部は、近い将来(例えば、1秒後)の車両分布を予測する。予測に当たっては、各車両の位置情報と移動情報から近い将来の位置を算出してまとめることで行う。ここでは、車線Aleftを走行する2台の車両は直進しており、図中の右側へ移動するということが分かる。
ステップS304で、路側通信装置の判断部は、遮蔽されると予測される車両があるかどうか判断する。すなわち、各車両が前のステップで予測した位置にあるとして、アンテナと車両の間の通信経路が遮られるかどうかを判断する。そしてこの条件に該当する場合は(S304=Y)、電波が遮られるという予測結果を出してS305に進む。一方、該当する車両が無い場合はS306に進む。そして、本実施例では、車両A01とアンテナとの間に車両A02が入り込むため、通信経路が遮られるという判断結果が得られる。な
お、遮蔽状態の判断方法については後に詳述する。
ステップS305で、路側通信装置の送信制御部は、車両A01の予測される移動先が情報送信エリアとなるように指向性、出力強度および変調方式を制御して、通行止めであるという情報を送信する。これにより、車両A01との通信成立の確度を高めた情報送信が行われる。一方、遮蔽状態と予測される車両がなければ(S402=N)、個別の車両への情報送信は行わずに次のステップに進む。
ステップS404で、路側通信装置の送信制御部は、エリア(A)全域を情報送信エリアとして、通行止めであるという情報を送信する。
【0033】
そして、情報を受信した車両A01は、適切な後続処理を行う。例えば、運転者に対して、音声メッセージや車載モニターへの出力によって、通行止めである旨を通知して車線変更を促すことができる。
【0034】
(遮蔽状態)
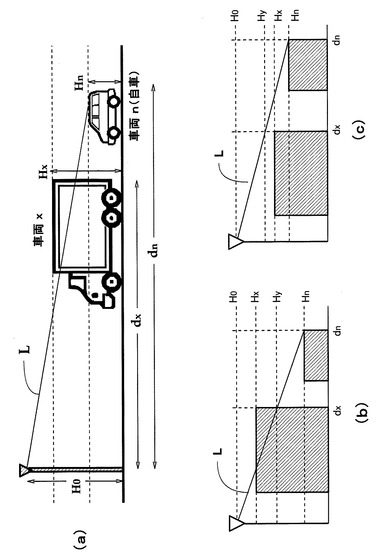
ここで、図5を参照しつつ、遮蔽状態が起きる条件について説明する。遮蔽状態は、路側通信装置と車両との間に、車高の高い別車両が入り込み、通信経路を妨害するような時に起きる。図5(a)で、乗用車である車両nが自車であり、車高はHnである。路側通信装置から車両nの遠い側の端までの距離はdnである。また、トラックである車両xは、車高はHxであり、路側通信装置から車両xの遠い側の端までの距離はdxである。また、路側通信装置の高さはH0である。車両nのルーフトップと、路側通信装置を結ぶ直線Lを別車両(車両x)が遮っていれば、車両nが遮蔽されたと判断できる。
【0035】
路側通信装置、車両nおよび車両xの関係を模式図で示す。図5(b)では車両nが遮蔽状態であり、図5(c)では遮蔽状態ではない。図中に示したように、直線Lと、dxから真上に伸びる線とが交わる点をHyとおくと、Hx>Hyを満たす場合に、車両nが遮蔽状態にあると言える。
ここで、直線Lを対角線とする長方形に注目すると、式(1)が成り立つ。ここからHyを求め、Hx>Hyに代入すると式(2)が導かれる。この式(2)が満たされるとき、判断部は、車両nが遮蔽されると予測する。
【数1】

【0036】
なお、別車両による電波の遮蔽が起きるかどうかについては、車高以外にもいくつかの要因が考えられる。たとえば遮蔽される側の車両については、アンテナが設置されている位置、アンテナの高さや感度が関係してくる。遮蔽する側の車両については、横幅や車体の形状も関係してくる。路側通信装置は、車両情報としてこれらの情報も含めて受信するようにすれば、遮蔽状態の予測の精度を向上させることが可能である。
【0037】
この実施例のように、路側通信装置が、遮蔽状態と予想される車両に対して個別にメッセージ送信することにより、車両との通信成立の確度を向上させることができ、運転者の利便性や安全性の向上といった効果を得ることができる。
【0038】
<実施例2>
本実施例では、路側通信装置がサービス提供エリア全域に情報送信を行った時に遮蔽されていた車両がある場合に、送信制御部が個別に情報送信するように制御を行う例を説明する。本実施例では、実施例1と同様に、図3のエリア(A)で事故が発生し、車線Aleftが通行止めになった場合を想定する。
【0039】
図6のフローチャートを用いて、本実施例の路車間通信システムの動作を説明する。
ステップS401での交通情報取得は、実施例1と同様に行われる。
ステップS402で、路側通信装置の送信制御部は、エリア(A)全域に向けて、車線Aleftで事故が発生して通行できない状態であるという情報を送信する。しかし、このとき車両A01とアンテナとの間にトラックが入っているため、車両A01は情報を受信できておらず、また、車両A01が定期的に送信する車両情報は路側通信装置まで届いていない。
ステップS403で、路側通信装置の情報取得部は、各車両と通信を行って車両情報を取得する。ここでは、車線Aleftを走行する車両のうち、車両A01の前後の車両からの情報を受信する。しかし、車両A01からの電波は遮蔽されているため受信できていない。
ステップS404で、路側通信装置の判断部は、遮蔽状態の車両があるかどうか判断する。ここで、現在から少し前、車両A01と後続のトラックがエリア(A)の左端の交差点付近にいた時点のことを考えると、当時はまだ車両A01とアンテナとの間にトラックは入っておらず、定期的な通信が成立していたと考えられる。その後、双方の車両が右方向に移動し、アンテナと車両A01との間にトラックが入り込むことにより、通信が途絶する。したがって、判断部は、車両A01との通信状況の変化をとらえることで、遮蔽状態にあるかを推測することができる。そして遮蔽状態の車両A01が存在すると判断すれば(S405=Y)、S405へ進み、存在しないと判断すれば(S405=N)処理を終了する。
ステップS405で、路側通信装置の送信制御部は、車両A01が存在すると推測できる位置が情報送信エリアとなるように指向性、出力強度および変調方式を制御して、通行止めであるという情報を再度送信する。そして情報を受信した車両A01は、適切な後続処理を行う。
【0040】
このように、路側通信装置が、遮蔽状態の車両を検出して個別にメッセージ送信することにより、車両との通信成立の確度を向上させることができ、運転者の利便性と安全性の向上といった効果を得ることができる。
【0041】
<実施例3>
本実施例では、路側通信装置が、エリア内に危険な状態の車両があるかを判断し、個別に情報提供を行う例を説明する。現在、交差点の左右方向の信号機が青であるとする。エリア(A)の左端で、車両A03が右折しようとしており、右の方向指示器を点灯させている。また、車両C02は、エリア(C)の車線CLeftを直進して高速で交差点に進入しようとしている。このとき、高速で移動する車両C02が通る車線はエリア(A)とエリア(C)にまたがっていることから、両エリアの全域に、高速で移動する車両があるという情報が送信される。さらに、車両A02について考えると、このまま右折しようとすると、車両C02との関係で、右折車と直進車の間の衝突事故、いわゆる右直事故が起きる危険性がある。そのため車両A02には個別に情報提供を行うことで、通信を確実に成立させる必要がある。
【0042】
図7のフローチャートを用いて、本実施例の路車間通信システムの路側通信装置の動作を説明する。
ステップS501で、路側通信装置AとCの情報取得部は、それぞれエリア(A)と(
C)の交通情報を取得する。このとき、信号機からの情報により左右方向の信号が青であることが分かる。なお、双方の路側通信装置は互いに情報を送り合い、交通情報、車両情報などを共有することができるものとする。
ステップS502で、路側通信装置AとCの情報取得部は、各車両と通信を行って車両情報を取得する。ここでは車両A02が停止し、右の方向指示器を点灯させていることが分かる。また、車両C02の車両情報に基づき、車両C02が高速で移動していることが分かる。
ステップS503で、路側通信装置AとCの送信制御部は、それぞれエリア(A)と(C)の全域に、高速で移動する車両C02があることを通知する。
ステップS504で、路側通信装置AとCの判断部は、個別に情報を提供すべき車両があるか判断する。ここでは、右折しようとしている車両A02に対して確実に情報提供する必要があることから、個別に提供すべきと判断し(S504=Y)、S505に進む。一方、個別提供の必要性がないと判断すれば(S504=N)、処理を終了する。
ステップS505で、路側通信装置Aの送信制御部は、車両A02が情報送信エリアとなるように指向性、出力強度および変調方式を制御して、高速で移動する車両があるという情報を送信する。そして、情報を受信した車両A02は、適切な後続処理を行う。
【0043】
このように、路側通信装置が、車両情報と交通情報に基づいて、危険な状態にあるため個別に情報を提供すべき車両を検出することにより、車両との通信成立の確度を向上させることができ、運転者の利便性や安全性の向上といった効果を得ることができる。
【0044】
実施例3における、危険な状態にあるため個別の情報提供を必要とする車両について、上に書いたものとは別の例を挙げる。まず、図3のエリア(C)にある車両C03が車線変更する場面について考える。車両C03は、現在走行している追越車線Crightから、走行車線CLeftへ車線変更しようとしており、比較的高速で走行し、左の方向指示器を点灯させている。車線CLeftには、車両C04と車両C02があり、車両C03は両者の間の位置に入ろうとしている。車両C04は進行方向の前方に車両C03を視認できるが、車両C02からは後方であり、また交差点に進入しようとしているため前方に注意が集中しがちである。そこで、路側通信装置Cは車両C02に対して情報を送信して、後方から接近する車両があることを通知する。
【0045】
次に、エリア(D)にある車両D01について考える。エリア(D)には、細い横道Eが合流している。ここで車両D01が直進しているところへ、横道Eから車両E01が出てくると出会い頭の事故が起こりかねず、危険である。そこで、路側通信装置Dは車両E01に対して直進車両があることを通知し、車両D01に対しては横道から出てきそうな車両があることを通知する。また、建築物・樹木・看板などの障害物により運転者にとっての死角が多い場所でも同様の通知が有効である。
【0046】
あるいは、制限速度を大幅に超過して走行している車両がある場合、エリア全域には、速度超過車両があることを通知して注意を促し、速度超過車両に対しては、個別の車両に警告メッセージを送信することも考えられる。
【0047】
また、路車間通信システムが車両情報を取得する方法として、上では各車両が自身の車両情報を送信することによると述べていた。それに加え、各車両が、近傍の別の車両の車両情報を取得し路側通信装置に送信してもよい。別の車両の車両情報を取得する手段としては、車載通信装置に車車間通信機能を持たせ、付近の車両と交信して情報を取得する方法がある。また別の手段として、車載カメラによる撮影画像への画像認識によっても良い。このように、各車両が付近の別車両の車両情報を送信するような構成であれば、当該別車両と路側通信装置との間の通信が何らかの理由で途絶えていたとしても、判断部の判断材料として利用することが可能になり、判断の的確さを向上させることができる。
【0048】
以上の例では、路側通信装置の送信制御部が情報送信エリアを制御する際に、指向性、出力強度および変調方式の全てを組み合わせて制御しているように記載した。しかし実際はこれに限るものではなく、求められる送信の精度や装置の能力に応じて、いずれか1種類の制御方法のみで制御することや、いずれか2種類制御方法を組み合わせて制御することも可能である。
【符号の説明】
【0049】
1 車両
11 車載通信装置
2 路側通信装置
22 情報取得部
23 判断部
24 送信制御部
【技術分野】
【0001】
本発明は、通信装置を備える車両と路側通信装置を含む路車間通信システムに関する。
【背景技術】
【0002】
通常、路車間通信システムの路側通信装置は、サービス提供エリア内の車両に対して、乗員による運転操作や自律的な運転制御に必要な情報を、操作や制御に間に合うような適切なタイミングで提供できるよう構成されている。例えば、路側通信装置が安全運転の役に立つ情報を送信し、その情報を受信した車両が自律的あるいは乗員の操作に従って動作することで安全運転を実現する、といったように行われる。このように適切な情報提供を行うために、路側通信装置はサービス提供エリア内の状況を把握し、提供する情報の内容を決定し、実際に情報を送信する。そして車両は情報を受信する。
【0003】
路車間通信システムの路側通信装置が情報を取得する際にも、情報を送信する際にも、実際の通信は路側通信装置のアンテナと車載の通信装置の間で、電波ビーコン等の無線装置を用いて行われることが多い。そのため路車間通信システムが機能を発揮するためには、サービス提供エリア内の車両と路側通信装置との間で、通信の成立を確保する必要がある。
【0004】
特開2007−306273号公報(特許文献1)では、路側通信装置が道路上の車両の位置情報を取得し、その位置情報に基づいて通信が成立しているゾーンを推定する。そして通信成立ゾーンが設計値とは異なる場合、アンテナの指向性を制御して通信品質を保つようになっている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−306273号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1の技術では、1カ所の路側通信装置でできるだけ広い範囲をカバーしサービスを提供しようとすると、通信エリア内に複数台の車両が存在することになる。すると路側通信装置は分布全域の通信品質を保つように動作するため、局所的に通信品質が悪くなることが考えられる。
【0007】
特許文献1の技術では、路側通信装置は基本的にサービス提供エリア全域に情報を送信しようとする。しかし実際の交通状況においては、サービス提供エリア内の特定の車両に対して情報を送信することが望ましい場面が生じ得る。例えば、サービス提供エリア全域に情報を送信した時に、ある車両と路側通信装置の間に車高の高い別の車両が入って電波が遮蔽され、通信ができなくなることがある。このような場合、再度の情報送信は遮蔽された車両だけに行えば充分である。また、再度の情報送信の時点でも依然としてその車両が遮蔽されていたとすると、同じ方法で再送したとしても通信は成立しない。
【0008】
また、特定の車両に対して情報を送信すべき別の例として、交通状況から見て危険な状態にある車両に対して、乗員の操作や自律的な制御を促すために、情報を提供するような場合が考えられる。このような安全にかかわる情報については確実に車両に届ける必要があるが、路側通信装置がサービス提供エリア全域に情報送信すると、前述したように局所的に通信品質が悪くなりかねないため、通信が成立しない恐れがある。
【0009】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、路車間通信システムにおいて、路側通信装置から車両への情報送信が成立する可能性を高くするための技術を提供することである。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明にかかる路車間通信システムでは以下の構成を採用する。すなわち、通信装置を備える車両と、道路上の所定の範囲であるサービス提供エリアに存在する車両と情報の送受信を行うことが可能な路側通信装置とを含む路車間通信システムであって、前記路側通信装置は、情報送信時の指向性、出力強度および変調方式のうちいずれか1つ以上を制御することにより、サービス提供エリア内で実際に情報送信する範囲である情報送信エリアを制御する送信制御部と、車両の位置情報と移動情報とを含む車両情報を取得する情報取得部と、前記車両情報を利用して個別に情報を提供すべき車両の有無および位置を判断する判断部とを備え、前記送信制御部は、個別に情報を提供するべきと前記判断部によって判断された車両がある場合、サービス提供エリアの全域を情報送信エリアとした情報送信に加えて、当該車両の近傍領域を情報送信エリアとして情報送信することを特徴とする路車間通信システムである。
【0011】
通常の路車間通信システムの路側通信装置は、サービス提供エリア内の状況を把握し、提供する情報を決定し、実際に情報を送信する。本発明では、通常の路車間通信システムでも行われるサービス提供エリア全体への情報送信に加え、個別の車両に対する情報送信の必要性を判断した上で、実際に情報送信を行う。そこで、本発明の各構成要素がどのような役割を果たして路車間通信システムの機能が実現されているか、以下に説明する。
【0012】
まず、路側通信装置の情報取得部が、種々の情報を取得してサービス提供エリア内の状況を把握する方法について述べる。取得する情報の種類は、必須の情報として車両情報があり、それに加えて交通情報を取得することが好ましい。車両情報とは、サービス提供エリア内の各車両に関する情報であり、車両の位置情報と移動情報を含む。路側通信装置の情報取得部は、各車両の車載通信装置と通信を行い、車両情報を取得する。このように車両ごとの情報を取得することによって、各車両の状況を正確に把握できるので、個別の車両に情報を提供するかどうかの判断を行うための材料を得ることができる。
【0013】
なお、車両情報のうち位置情報とは、車両の現在の位置を特定する情報である。また、移動情報とは、車両の速さ、進行方向、運転者による方向指示器操作など、車両の現在の移動状況の把握や、将来的な移動状況の予測に用いられる情報である。交通情報とは、サービス提供エリア内の交通状況を指す。
【0014】
次に、路側通信装置の判断部が行う判断について述べる。判断内容は、サービス提供エリアの全域に対する情報送信に加えて、個別に情報を提供するべき車両が存在するか、および、存在する場合はどのような情報を提供するかである。路側通信装置の判断部は、情報取得部から情報を受け取ると、各車両の車両情報に基づき、現在のサービス提供エリア内の車両分布や相対的な位置・速度の関係を把握し、または、近い将来における車両分布を予測する。そして、各車両について、情報を提供する条件に当てはまるかどうかをチェックする。判断部は、好ましくは、車両情報に加えて交通情報を利用して、判断の精度を向上させると良い。このように、判断部は、サービス提供エリア内の車両から取得した情報を利用するので、遅れがなく正確な車両分布の把握または予測を行うことができる。そして、正確な車両分布に基づいて判断を行うので、情報を個別に提供する対象を的確に見出すことができる。
【0015】
次に、路側通信装置の送信制御部が行う制御について説明する。送信制御部は、送信の
際の指向性、出力強度および変調方式のうちいずれか1つ以上を制御することによって、実際に情報が送信される範囲(以降、情報送信エリア)を制御する。送信制御部は、情報送信エリアをサービス提供エリアと同じ範囲とすることにより、サービス提供エリア全域に情報を送信することができる。また、送信制御部は、情報送信エリアを特定の車両の周辺の範囲とすることにより、個別の車両に情報を送信することができる。このように、個別の車両の周辺を情報送信エリアとして集中的に情報送信することにより、通信が成立する可能性を高めることができるようになる。
【0016】
次に、通信装置を備える車両の動作について説明する。各車両は、自身の車両情報を路側通信装置に送る。また、路側通信装置が提供した情報を受信すると、その情報を利用して運転者が運転操作をしたり、車両が自律的に動作を行うことによって、利便性や安全性の向上などの効果が得られる。
【0017】
本発明の第1の好ましい例では、前記判断部は、前記車両情報を利用して、サービス提供エリアに存在するものの他の車両により電波が遮蔽されているか、または、近い将来遮蔽される車両があるかどうかを判断し、該当する車両がある場合は、当該車両に個別に情報を提供すべきと判断する。
【0018】
このような第1の好ましい例において、路側通信装置の判断部が行う判断について説明する。判断部は、ある車両に向けて路側通信装置から送信された電波が、他の車両によって遮蔽されているか、あるいは近い将来遮蔽されるかを判断する。現在遮蔽されている車両に対しては、送信できなかった情報を再送信する必要があるが、当該車両と他の車両との位置関係が変わらなければ、再送信したとしても引き続き電波が遮蔽されてしまう。また、遮蔽されると予測される車両に対しては、通常行われるサービス提供エリア全域への情報送信を行ったところで通信が成立せず、情報を提供できない。
【0019】
そこで、遮蔽された車両への情報の再送信、または遮蔽されると予測される車両への情報送信においては、送信制御部が出力強度、指向性や変調方式を制御し、車両側の受信率を向上させて通信が成立しやすくする。出力強度の制御の例として、送信時の出力の強度を上げて、帯域あたりの送信電力を大きくして、回折波を増大させ車両に電波が届くようにすることができる。また、指向性の制御の例として、送信時の指向性を高めて対象車両にスポット的に情報を送信することができる。また、変調方式の制御の例として、送信時の変調方式を復調しやすいものに変更することができる。また、これらの制御のうち2種類を選んで組み合わせたり、3種類とも組み合わせたりすることもできる。このように、判断部が遮蔽状態について判断し、送信制御部が判断結果に従って個別に情報送信を行うことにより、車両との通信を成立させ、必要な情報を的確に届けることができる。
【0020】
本発明の第2の好ましい例では、前記判断部は、前記車両情報を利用して、それぞれの車両について危険な状態にあるかどうかを判断し、危険な状態の車両があれば、当該車両に個別に情報を提供すべきと判断する。
【0021】
このような第2の好ましい例において、路側通信装置の判断部が行う判断について説明する。この例で判断部は、各車両について、交通状況や予測される車両分布から見て危険な状態であるかどうかを判断する。もしも危険な状態にあれば、車両の乗員に対して注意を喚起したり、車両の自律的な危険回避動作を促したりするために、個別に情報を提供するべきと判断する。そして、送信制御部は、送信出力や指向性の調節により、個別の車両に対して情報送信が行われるように制御する。このように、判断部が個別の車両について危険状態かどうかを判断し、送信制御部が判断結果に従って情報送信を制御することにより、運転を支援する必要がある車両との通信を成立させ、必要な情報を的確に届けることができる。
【発明の効果】
【0022】
本発明によれば、路車間通信システムにおいて、路側通信装置から車両への情報送信が成立する可能性を高くすることができるようになる。
【図面の簡単な説明】
【0023】
【図1】本発明の路車間通信システムの構成を示すブロック図である。
【図2】路車間通信システムに含まれる車両が定期的に行う処理を示すフローチャートである。
【図3】各実施例におけるサービス提供エリアの状況を示す平面図である。
【図4】実施例1で路側通信装置が行う処理を示すフローチャートである。
【図5】図5(a)は電波が遮蔽される状況を説明するための概念図、図5(b)は遮蔽される場合の模式図、図5(c)は遮蔽されない場合の模式図である。
【図6】実施例2で路側通信装置が行う処理を示すフローチャートである。
【図7】実施例3で路側通信装置が行う処理を示すフローチャートである。
【発明を実施するための形態】
【0024】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0025】
(路車間通信システムの構成)
図1のブロック図に路車間通信システムの構成を示す。車両1は、車載通信装置11とアンテナ12を備えており、車載通信装置11を用いてアンテナ12を制御して、情報の送受信を行う。車両1は、さらに、車両情報収集部13、メモリ14、GPS15、加速度センサ16、および、方向指示器17を備えている。メモリ14には、車両自身の車高が格納されている。GPS15は、衛星測位システムの端末であり、GPS衛星から信号を受信して現在位置を検出する。加速度センサ16は、車両の速さと進行方向を検出する。方向指示器17は、運転者の操作に従って点灯状態になる。車両情報収集部13は、メモリ14から読み出した車高、GPS15が検出した現在位置、加速度センサ16が検出した速さと進行方向、および、方向指示器17から得た方向指示を、車両情報としてまとめ、車載通信装置11に出力する。
【0026】
なお、電波状況によってはGPSによる測位の信頼性が低いことがある。そのような場合、信頼性が高かった時のGPS検出結果からの変位を車両の速度や進行方向によって補強し、現在位置を検出しても良い。また、車両情報として車高を直接送信するのではなく、自車の車種情報を送信しても良い。その場合、路側通信装置の方で車種に基づいて車高を調べるようにすれば、車高を直接送信するのと同様の処理を行うことができる。
【0027】
路側通信装置2は、アンテナ21、情報取得部22、判断部23、および、送信制御部24を備えている。アンテナ21としては指向性アンテナを好ましく利用でき、例えばアレイアンテナを用いて素子ごとに電波の位相を制御することによって、アンテナからの電波の出力方向や強度を調節することができる。情報取得部22は、アンテナ21を用いて車両情報を受信する。判断部23は、情報取得部22が取得した各車両の車両情報から車両分布を把握し、好ましくは交通情報も取得した上で、情報提供の対象や内容にかかわる判断を行う。送信制御部24はアンテナ21を制御して情報を送信し、その際には情報送信エリアの制御を行う。送信制御部24が行う制御としては、上記アンテナ21の指向性を制御することの他に、無線機の出力強度を上げることにより、帯域あたりの送信電力を大きくして、車両側の受信率を向上させることができる。あるいは、情報を送信する際に、送信電力は同じにしたまま、送信に使用する周波数帯域を広帯域から狭帯域に変更することにより、帯域当たりの電力量を大きくして、受信率を向上させることができる。さらに、アンテナ21から情報を送信する際の変調方式を、復調しやすいものに変更すること
により、受信率を向上させることが可能である。
【0028】
なお、上記情報取得部は、車両情報に加えて交通情報を取得して判断部に出力するようにしてもよい。その場合判断部は両方の情報を利用して判断を行う。交通情報とはサービス提供エリア内の交通状況を指し、例えば信号の点灯状態、一時停止や通行止めといった交通規制に関する情報、路面状態などがある。情報取得部は、これら交通情報を、例えば外部との通信によって取得することができる。すなわち、不図示の信号機と通信を行うことによる点灯状況の取得や、VICS(財団法人道路交通情報通信システムセンターの商標)から情報提供を受けることなどである。あるいは、カメラ等を用いてサービス提供エリアの様子を撮影するによっても交通情報や、車両情報を取得可能である。
【0029】
図2のフローチャートを用いて、路車間通信システムのうち車両側の動作について補足説明する。この動作は、各実施例に共通するものである。車両は動作している間、本フローの処理を定期的に(例えば100msecに1回)繰り返す。ステップS201で、車両情報収集部が車両情報を収集し、車載通信装置がアンテナを制御して、その車両情報を送信する。ステップS202で、車載通信装置は、路側通信装置から提供された情報を受信する。ステップS203で、車両は提供情報に応じて取るべきアクションを実行する。
【0030】
<実施例1>
本実施例では、路側通信装置が、近い将来に遮蔽されると予測される車両がある場合、サービス提供エリア全域への送信とは別に、その遮蔽される車両に個別に情報送信する例を説明する。
【0031】
図3は、ある交差点周辺の簡略化した平面図である。この交差点には4つの路側通信装置A〜Dが設置されている。それぞれの路側通信装置は、図中の領域(A)〜(D)をカバーし、サービス提供エリアとしている。いま、エリア(A)の右寄りの地点で事故が発生し、通行できない状態になっている。そこで路側通信装置Aがエリア(A)の車両に情報を送信して通行止めであることを通知する。
【0032】
図4のフローチャートを用いて、本実施例の路車間通信システムの路側通信装置の動作を説明する。
ステップS301で、路側通信装置の情報取得部は、エリア(A)の交通情報を取得する。ここでは、カメラでエリア(A)を撮影した画像を解析し、車線Aleftで衝突事故が発生して通行できないという交通情報を得る。
ステップS302で、路側通信装置の情報取得部は、エリア(A)の各車両と通信を行って車両情報を取得する。ここでは、車線Aleftを走行中の、乗用車である車両A01とトラックである車両A02の、計2台の車両情報が得られる。車両A02の車高は車両A01よりも相当程度高いものとする。なお、事故を起こした当事者の車両の通信装置が稼働している状態であれば、その車載通信装置から受信した車両情報に基づいて、通行止めであるという交通情報を得ることもできる。
ステップS303で、路側通信装置の判断部は、近い将来(例えば、1秒後)の車両分布を予測する。予測に当たっては、各車両の位置情報と移動情報から近い将来の位置を算出してまとめることで行う。ここでは、車線Aleftを走行する2台の車両は直進しており、図中の右側へ移動するということが分かる。
ステップS304で、路側通信装置の判断部は、遮蔽されると予測される車両があるかどうか判断する。すなわち、各車両が前のステップで予測した位置にあるとして、アンテナと車両の間の通信経路が遮られるかどうかを判断する。そしてこの条件に該当する場合は(S304=Y)、電波が遮られるという予測結果を出してS305に進む。一方、該当する車両が無い場合はS306に進む。そして、本実施例では、車両A01とアンテナとの間に車両A02が入り込むため、通信経路が遮られるという判断結果が得られる。な
お、遮蔽状態の判断方法については後に詳述する。
ステップS305で、路側通信装置の送信制御部は、車両A01の予測される移動先が情報送信エリアとなるように指向性、出力強度および変調方式を制御して、通行止めであるという情報を送信する。これにより、車両A01との通信成立の確度を高めた情報送信が行われる。一方、遮蔽状態と予測される車両がなければ(S402=N)、個別の車両への情報送信は行わずに次のステップに進む。
ステップS404で、路側通信装置の送信制御部は、エリア(A)全域を情報送信エリアとして、通行止めであるという情報を送信する。
【0033】
そして、情報を受信した車両A01は、適切な後続処理を行う。例えば、運転者に対して、音声メッセージや車載モニターへの出力によって、通行止めである旨を通知して車線変更を促すことができる。
【0034】
(遮蔽状態)
ここで、図5を参照しつつ、遮蔽状態が起きる条件について説明する。遮蔽状態は、路側通信装置と車両との間に、車高の高い別車両が入り込み、通信経路を妨害するような時に起きる。図5(a)で、乗用車である車両nが自車であり、車高はHnである。路側通信装置から車両nの遠い側の端までの距離はdnである。また、トラックである車両xは、車高はHxであり、路側通信装置から車両xの遠い側の端までの距離はdxである。また、路側通信装置の高さはH0である。車両nのルーフトップと、路側通信装置を結ぶ直線Lを別車両(車両x)が遮っていれば、車両nが遮蔽されたと判断できる。
【0035】
路側通信装置、車両nおよび車両xの関係を模式図で示す。図5(b)では車両nが遮蔽状態であり、図5(c)では遮蔽状態ではない。図中に示したように、直線Lと、dxから真上に伸びる線とが交わる点をHyとおくと、Hx>Hyを満たす場合に、車両nが遮蔽状態にあると言える。
ここで、直線Lを対角線とする長方形に注目すると、式(1)が成り立つ。ここからHyを求め、Hx>Hyに代入すると式(2)が導かれる。この式(2)が満たされるとき、判断部は、車両nが遮蔽されると予測する。
【数1】
【0036】
なお、別車両による電波の遮蔽が起きるかどうかについては、車高以外にもいくつかの要因が考えられる。たとえば遮蔽される側の車両については、アンテナが設置されている位置、アンテナの高さや感度が関係してくる。遮蔽する側の車両については、横幅や車体の形状も関係してくる。路側通信装置は、車両情報としてこれらの情報も含めて受信するようにすれば、遮蔽状態の予測の精度を向上させることが可能である。
【0037】
この実施例のように、路側通信装置が、遮蔽状態と予想される車両に対して個別にメッセージ送信することにより、車両との通信成立の確度を向上させることができ、運転者の利便性や安全性の向上といった効果を得ることができる。
【0038】
<実施例2>
本実施例では、路側通信装置がサービス提供エリア全域に情報送信を行った時に遮蔽されていた車両がある場合に、送信制御部が個別に情報送信するように制御を行う例を説明する。本実施例では、実施例1と同様に、図3のエリア(A)で事故が発生し、車線Aleftが通行止めになった場合を想定する。
【0039】
図6のフローチャートを用いて、本実施例の路車間通信システムの動作を説明する。
ステップS401での交通情報取得は、実施例1と同様に行われる。
ステップS402で、路側通信装置の送信制御部は、エリア(A)全域に向けて、車線Aleftで事故が発生して通行できない状態であるという情報を送信する。しかし、このとき車両A01とアンテナとの間にトラックが入っているため、車両A01は情報を受信できておらず、また、車両A01が定期的に送信する車両情報は路側通信装置まで届いていない。
ステップS403で、路側通信装置の情報取得部は、各車両と通信を行って車両情報を取得する。ここでは、車線Aleftを走行する車両のうち、車両A01の前後の車両からの情報を受信する。しかし、車両A01からの電波は遮蔽されているため受信できていない。
ステップS404で、路側通信装置の判断部は、遮蔽状態の車両があるかどうか判断する。ここで、現在から少し前、車両A01と後続のトラックがエリア(A)の左端の交差点付近にいた時点のことを考えると、当時はまだ車両A01とアンテナとの間にトラックは入っておらず、定期的な通信が成立していたと考えられる。その後、双方の車両が右方向に移動し、アンテナと車両A01との間にトラックが入り込むことにより、通信が途絶する。したがって、判断部は、車両A01との通信状況の変化をとらえることで、遮蔽状態にあるかを推測することができる。そして遮蔽状態の車両A01が存在すると判断すれば(S405=Y)、S405へ進み、存在しないと判断すれば(S405=N)処理を終了する。
ステップS405で、路側通信装置の送信制御部は、車両A01が存在すると推測できる位置が情報送信エリアとなるように指向性、出力強度および変調方式を制御して、通行止めであるという情報を再度送信する。そして情報を受信した車両A01は、適切な後続処理を行う。
【0040】
このように、路側通信装置が、遮蔽状態の車両を検出して個別にメッセージ送信することにより、車両との通信成立の確度を向上させることができ、運転者の利便性と安全性の向上といった効果を得ることができる。
【0041】
<実施例3>
本実施例では、路側通信装置が、エリア内に危険な状態の車両があるかを判断し、個別に情報提供を行う例を説明する。現在、交差点の左右方向の信号機が青であるとする。エリア(A)の左端で、車両A03が右折しようとしており、右の方向指示器を点灯させている。また、車両C02は、エリア(C)の車線CLeftを直進して高速で交差点に進入しようとしている。このとき、高速で移動する車両C02が通る車線はエリア(A)とエリア(C)にまたがっていることから、両エリアの全域に、高速で移動する車両があるという情報が送信される。さらに、車両A02について考えると、このまま右折しようとすると、車両C02との関係で、右折車と直進車の間の衝突事故、いわゆる右直事故が起きる危険性がある。そのため車両A02には個別に情報提供を行うことで、通信を確実に成立させる必要がある。
【0042】
図7のフローチャートを用いて、本実施例の路車間通信システムの路側通信装置の動作を説明する。
ステップS501で、路側通信装置AとCの情報取得部は、それぞれエリア(A)と(
C)の交通情報を取得する。このとき、信号機からの情報により左右方向の信号が青であることが分かる。なお、双方の路側通信装置は互いに情報を送り合い、交通情報、車両情報などを共有することができるものとする。
ステップS502で、路側通信装置AとCの情報取得部は、各車両と通信を行って車両情報を取得する。ここでは車両A02が停止し、右の方向指示器を点灯させていることが分かる。また、車両C02の車両情報に基づき、車両C02が高速で移動していることが分かる。
ステップS503で、路側通信装置AとCの送信制御部は、それぞれエリア(A)と(C)の全域に、高速で移動する車両C02があることを通知する。
ステップS504で、路側通信装置AとCの判断部は、個別に情報を提供すべき車両があるか判断する。ここでは、右折しようとしている車両A02に対して確実に情報提供する必要があることから、個別に提供すべきと判断し(S504=Y)、S505に進む。一方、個別提供の必要性がないと判断すれば(S504=N)、処理を終了する。
ステップS505で、路側通信装置Aの送信制御部は、車両A02が情報送信エリアとなるように指向性、出力強度および変調方式を制御して、高速で移動する車両があるという情報を送信する。そして、情報を受信した車両A02は、適切な後続処理を行う。
【0043】
このように、路側通信装置が、車両情報と交通情報に基づいて、危険な状態にあるため個別に情報を提供すべき車両を検出することにより、車両との通信成立の確度を向上させることができ、運転者の利便性や安全性の向上といった効果を得ることができる。
【0044】
実施例3における、危険な状態にあるため個別の情報提供を必要とする車両について、上に書いたものとは別の例を挙げる。まず、図3のエリア(C)にある車両C03が車線変更する場面について考える。車両C03は、現在走行している追越車線Crightから、走行車線CLeftへ車線変更しようとしており、比較的高速で走行し、左の方向指示器を点灯させている。車線CLeftには、車両C04と車両C02があり、車両C03は両者の間の位置に入ろうとしている。車両C04は進行方向の前方に車両C03を視認できるが、車両C02からは後方であり、また交差点に進入しようとしているため前方に注意が集中しがちである。そこで、路側通信装置Cは車両C02に対して情報を送信して、後方から接近する車両があることを通知する。
【0045】
次に、エリア(D)にある車両D01について考える。エリア(D)には、細い横道Eが合流している。ここで車両D01が直進しているところへ、横道Eから車両E01が出てくると出会い頭の事故が起こりかねず、危険である。そこで、路側通信装置Dは車両E01に対して直進車両があることを通知し、車両D01に対しては横道から出てきそうな車両があることを通知する。また、建築物・樹木・看板などの障害物により運転者にとっての死角が多い場所でも同様の通知が有効である。
【0046】
あるいは、制限速度を大幅に超過して走行している車両がある場合、エリア全域には、速度超過車両があることを通知して注意を促し、速度超過車両に対しては、個別の車両に警告メッセージを送信することも考えられる。
【0047】
また、路車間通信システムが車両情報を取得する方法として、上では各車両が自身の車両情報を送信することによると述べていた。それに加え、各車両が、近傍の別の車両の車両情報を取得し路側通信装置に送信してもよい。別の車両の車両情報を取得する手段としては、車載通信装置に車車間通信機能を持たせ、付近の車両と交信して情報を取得する方法がある。また別の手段として、車載カメラによる撮影画像への画像認識によっても良い。このように、各車両が付近の別車両の車両情報を送信するような構成であれば、当該別車両と路側通信装置との間の通信が何らかの理由で途絶えていたとしても、判断部の判断材料として利用することが可能になり、判断の的確さを向上させることができる。
【0048】
以上の例では、路側通信装置の送信制御部が情報送信エリアを制御する際に、指向性、出力強度および変調方式の全てを組み合わせて制御しているように記載した。しかし実際はこれに限るものではなく、求められる送信の精度や装置の能力に応じて、いずれか1種類の制御方法のみで制御することや、いずれか2種類制御方法を組み合わせて制御することも可能である。
【符号の説明】
【0049】
1 車両
11 車載通信装置
2 路側通信装置
22 情報取得部
23 判断部
24 送信制御部
【特許請求の範囲】
【請求項1】
通信装置を備える車両と、
道路上の所定の範囲であるサービス提供エリアに存在する車両と情報の送受信を行うことが可能な路側通信装置と、
を含む路車間通信システムであって、
前記路側通信装置は、
情報送信時の指向性、出力強度および変調方式のうちいずれか1つ以上を制御することにより、サービス提供エリア内で実際に情報送信する範囲である情報送信エリアを制御する送信制御部と、
車両の位置情報と移動情報とを含む車両情報を取得する情報取得部と、
前記車両情報を利用して個別に情報を提供すべき車両の有無および位置を判断する判断部と、を備え、
前記送信制御部は、個別に情報を提供するべきと前記判断部によって判断された車両がある場合、サービス提供エリアの全域を情報送信エリアとした情報送信に加えて、当該車両の近傍領域を情報送信エリアとして情報送信する
ことを特徴とする路車間通信システム。
【請求項2】
前記判断部は、前記車両情報を利用して、サービス提供エリアに存在するものの他の車両により電波が遮蔽されているか、または、近い将来遮蔽される車両があるかどうかを判断し、該当する車両がある場合は、当該車両に個別に情報を提供すべきと判断する
ことを特徴とする請求項1に記載の路車間通信システム。
【請求項3】
前記車両の移動情報は、車両の速さ、車両の進行方向、および運転者による方向指示器操作の少なくとも1つを含む
ことを特徴とする請求項1または2に記載の路車間通信システム。
【請求項4】
前記車両情報は、さらに車高に関する情報を含む
ことを特徴とする請求項1〜3のいずれか1項に記載の路車間通信システム。
【請求項5】
前記情報取得部は、サービス提供エリア内での交通情報をさらに取得し、
前記判断部は、前記交通情報をさらに利用して判断を行う
ことを特徴とする請求項1〜4のいずれか1項に記載の路車間通信システム。
【請求項6】
前記判断部は、前記車両情報を利用して、それぞれの車両について危険な状態にあるかどうかを判断し、危険な状態の車両があれば、当該車両に個別に情報を提供すべきと判断する
ことを特徴とする請求項1〜5のいずれか1項に記載の路車間通信システム。
【請求項1】
通信装置を備える車両と、
道路上の所定の範囲であるサービス提供エリアに存在する車両と情報の送受信を行うことが可能な路側通信装置と、
を含む路車間通信システムであって、
前記路側通信装置は、
情報送信時の指向性、出力強度および変調方式のうちいずれか1つ以上を制御することにより、サービス提供エリア内で実際に情報送信する範囲である情報送信エリアを制御する送信制御部と、
車両の位置情報と移動情報とを含む車両情報を取得する情報取得部と、
前記車両情報を利用して個別に情報を提供すべき車両の有無および位置を判断する判断部と、を備え、
前記送信制御部は、個別に情報を提供するべきと前記判断部によって判断された車両がある場合、サービス提供エリアの全域を情報送信エリアとした情報送信に加えて、当該車両の近傍領域を情報送信エリアとして情報送信する
ことを特徴とする路車間通信システム。
【請求項2】
前記判断部は、前記車両情報を利用して、サービス提供エリアに存在するものの他の車両により電波が遮蔽されているか、または、近い将来遮蔽される車両があるかどうかを判断し、該当する車両がある場合は、当該車両に個別に情報を提供すべきと判断する
ことを特徴とする請求項1に記載の路車間通信システム。
【請求項3】
前記車両の移動情報は、車両の速さ、車両の進行方向、および運転者による方向指示器操作の少なくとも1つを含む
ことを特徴とする請求項1または2に記載の路車間通信システム。
【請求項4】
前記車両情報は、さらに車高に関する情報を含む
ことを特徴とする請求項1〜3のいずれか1項に記載の路車間通信システム。
【請求項5】
前記情報取得部は、サービス提供エリア内での交通情報をさらに取得し、
前記判断部は、前記交通情報をさらに利用して判断を行う
ことを特徴とする請求項1〜4のいずれか1項に記載の路車間通信システム。
【請求項6】
前記判断部は、前記車両情報を利用して、それぞれの車両について危険な状態にあるかどうかを判断し、危険な状態の車両があれば、当該車両に個別に情報を提供すべきと判断する
ことを特徴とする請求項1〜5のいずれか1項に記載の路車間通信システム。
【図1】

【図2】

【図3】

【図4】
【図5】
【図6】

【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−282562(P2010−282562A)
【公開日】平成22年12月16日(2010.12.16)
【国際特許分類】
【出願番号】特願2009−137417(P2009−137417)
【出願日】平成21年6月8日(2009.6.8)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年12月16日(2010.12.16)
【国際特許分類】
【出願日】平成21年6月8日(2009.6.8)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]