
路面摩擦係数推定装置
【課題】レスポンス良く、精度の良い路面μを推定する。
【解決手段】路面μ推定装置10は、サンプリング時間毎にタイヤが発生している実際の前後力を実前後力Fmsveとして算出し、実前後力Fmsveと同じタイミングで路面μをパラメータとして含むタイヤモデルによりタイヤが発生する理想的な前後力を理想前後力Fmdveとして算出して、少なくともサンプリング時間毎の実前後力Fmsveと理想前後力Fmdveとの偏差の二乗和が最小となるように路面μの値を最適化計算により求める。
【解決手段】路面μ推定装置10は、サンプリング時間毎にタイヤが発生している実際の前後力を実前後力Fmsveとして算出し、実前後力Fmsveと同じタイミングで路面μをパラメータとして含むタイヤモデルによりタイヤが発生する理想的な前後力を理想前後力Fmdveとして算出して、少なくともサンプリング時間毎の実前後力Fmsveと理想前後力Fmdveとの偏差の二乗和が最小となるように路面μの値を最適化計算により求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、タイヤ前後力を基に路面摩擦係数を推定する路面摩擦係数推定装置に関する。
【背景技術】
【0002】
近年、車両においてはトラクション制御、制動力制御、トルク配分制御等について様々な制御技術が提案され、実用化されている。これらの技術では、必要な制御量の演算、或いは、補正に路面摩擦係数(以下、路面μと略称)を用いるものも多く、その制御を確実に実行するためには、正確な路面μを推定する必要がある。
【0003】
例えば、特開2005−7972号公報では、車体速度を測定し、車体加速度を算出し、左右駆動輪のそれぞれの車輪速度と車体速度との差分によって、左右駆動輪のそれぞれのスリップ率を算出し、車体加速度に対するそれぞれのスリップ率の比率をスリップ比とし、これらスリップ比の勾配の大きさから左右駆動輪のそれぞれの路面μを推定する技術が開示されている。
【特許文献1】特開2005−7972号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の特許文献1に開示される技術のように、車体速度を測定し、スリップ率を算出して路面μを推定する技術では、必要なパラメータを精度良く検出して精度良く路面μを推定することが困難で、また、路面μを精度良く求めようとするとレスポンス良く推定することができないという問題がある。
【0005】
本発明は上記事情に鑑みてなされたもので、レスポンス良く、精度の良い路面μを推定することができる路面摩擦係数推定装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明は、サンプリング時間毎にタイヤが発生している実際の前後力を実前後力として算出する実前後力算出手段と、上記実前後力と同じタイミングで路面摩擦係数をパラメータとして含むタイヤモデルにより上記タイヤが発生する理想的な前後力を理想前後力として算出する理想前後力算出手段と、少なくとも上記サンプリング時間毎の上記実前後力と上記理想前後力との偏差の二乗和が最小となるように上記路面摩擦係数の値を最適化計算により求める路面摩擦係数推定手段とを備えたことを特徴としている。
【発明の効果】
【0007】
本発明による路面摩擦係数推定装置によれば、レスポンス良く、精度の良い路面μを推定することが可能となる。
【発明を実施するための最良の形態】
【0008】
以下、図面に基づいて本発明の実施の形態を説明する。
図1〜図7は本発明の実施の一形態を示し、図1は路面摩擦係数推定装置の機能ブロック図、図2は路面摩擦係数推定プログラムのフローチャート、図3は図2から続くフローチャート、図4はタイヤのブラシモデルの説明図、図5はタイヤの接地面内に働く力の分布の説明図、図6はスリップ率に対する前後力の特性を示す説明図、図7は推定前後力に応じて設定される重み係数の説明図である。
【0009】
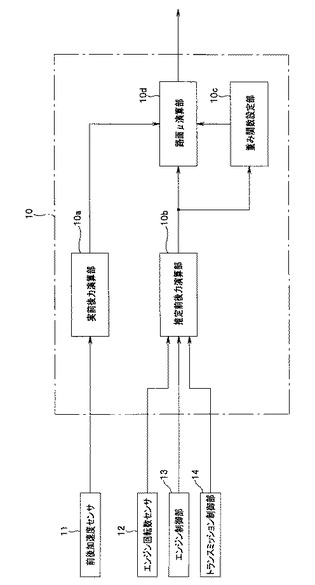
図1において、符号10は路面μを推定する路面μ推定装置を示し、前後加速度センサ11、エンジン回転数センサ12、エンジン制御部13、トランスミッション制御部14が接続されており、それぞれ前後加速度Ax、エンジン回転数Ne、エンジントルクTeg、主変速ギヤ比i、トルクコンバータのタービン回転数Ntが入力される。
【0010】
路面μ推定装置10は、上述の各入力信号に基づき、後述する路面摩擦係数推定プログラムに従って、サンプリング時間毎にタイヤが発生している実際の前後力を実前後力Fmsveとして算出し、実前後力Fmsveと同じタイミングで路面μをパラメータとして含むタイヤモデルによりタイヤが発生する理想的な前後力を理想前後力Fmdveとして算出して、少なくともサンプリング時間毎の実前後力Fmsveと理想前後力Fmdveとの偏差の二乗和が最小となるように路面μの値を最適化計算により求めるように構成されている。
【0011】
すなわち、路面μ推定装置10は、図1に示すように、実前後力演算部10a、推定前後力演算部10b、重み関数設定部10c、路面μ演算部10dから主要に構成されている。
【0012】
実前後力演算部10aは、前後加速度センサ11から前後加速度Axが入力される。そして、例えば、以下の(1)式により、現在の実前後力Fmseを演算する。
Fmse=m・Ax …(1)
ここで、mは車両質量である。
【0013】
また、実前後力演算部10aは、現在の実前後力Fmseを演算すると、過去に演算したサンプリング時間の異なる複数の実前後力により、ベクトル量である実前後力Fmsveを新たに設定する。本実施の形態では、実前後力Fmsveの例として、新しくサンプリングされた順に、Fms[0]、Fms[1]、・・・、Fms[m]、・・・、Fms[18]、Fms[19]の合計20個の成分から構成されているもので説明する。すなわち、

であり、新たに、実前後力Fmseが算出されると、
と更新される。上述のように演算される実前後力Fmsveは路面μ演算部10dに出力される。このように、実前後力演算部10aは、実前後力算出手段として設けられている。
【0014】
推定前後力演算部10bは、エンジン回転数センサ12からエンジン回転数Neが入力され、エンジン制御部13からエンジントルクTegが入力され、トランスミッション制御部14から主変速ギヤ比i、トルクコンバータのタービン回転数Ntが入力される。そして、例えば、以下の(4)式により、現在のエンジンからタイヤに伝達される前後力(推定前後力)Fmeを演算する。
Fme=Teg・t・i・η・if/Rt …(4)
ここで、tはトルクコンバータのトルク比であり、予め設定されている、トルクコンバータの回転速度比e(=Nt/Ne)とトルクコンバータのトルク比とのマップを参照することにより求められる。また、ηは駆動系伝達効率、ifはファイナルギヤ比、Rtはタイヤ半径である。
【0015】
また、推定前後力演算部10bは、現在の推定前後力Fmeを演算すると、過去に演算したサンプリング時間の異なる複数の推定前後力により、ベクトル量である推定前後力Fmveを新たに設定する。本実施の形態では、推定前後力Fmveの例として、新しくサンプリングされた順に、Fm[0]、Fm[1]、・・・、Fm[m]、・・・、Fm[18]、Fm[19]の合計20個の成分から構成されているもので説明する。すなわち、
であり、新たに、推定前後力Fmeが算出されると、
と更新される。上述のように演算される現在の推定前後力Fmeは、重み関数設定部10c、路面μ演算部10dに出力され、推定前後力Fmveは路面μ演算部10dに出力される。
【0016】
重み関数設定部10cは、推定前後力演算部10bからサンプリング時間毎の現在の推定前後力Fmeが入力される。そして、以下の(7)式に示すように、上述の実前後力Fmsve、推定前後力Fmveのデータ数と同じ行数、列数を持つ正方行列である、第1の重み関数W1veを設定し、路面μ演算部10dに出力する。
【0017】
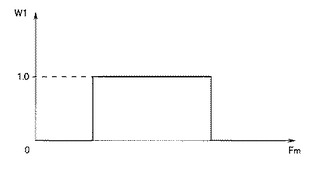
ここで、第1の重み関数W1veを構成する各成分は、例えば、図7のマップを参照して設定される値であり、S/N比が悪く誤差が大きいと考えられる推定前後力の小さい領域、及び、明らかに誤った値であると考えられる推定前後力の大きな領域では0に設定されるようにして、そのサンプリング時間におけるデータが路面μの推定に影響を与えないようにする。尚、その他にも車速が小さい領域のデータを無効にする、車体すべり角が大きい場合のデータを無効にする(横力が大きいと精度が低下することを考慮)、又は、サンプリング時間の古いデータを無効にする等をこの第1の重み関数W1veの成分に含ませるようにしても良い。
【0018】
路面μ演算部10dは、実前後力演算部10aから実前後力Fmsveが入力され、推定前後力演算部10bから推定前後力Fmveが入力され、重み関数設定部10cから第1の重み関数W1veが入力される。
【0019】
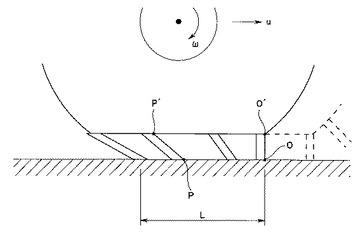
まず、本実施形態における路面μ推定の主要なロジックについて、図4のタイヤのブラシモデルで説明する。図4において、車体の前後方向をx軸として、時間Δtの間にO点(接地開始点)から入った接地点の進む距離、P点のx座標は、
x=u・Δt …(8)
である。ここで、uは車体速度である。
【0020】
また、O’点(接地開始点Oのトレッドベース上の点)から入ったP’点のx座標は、
x’=R0・ω・Δt …(9)
である。ここで、R0はタイヤの有効転がり半径、ωはタイヤ回転速度である。
【0021】
従って、P点とP’点のx方向の相対変位、つまり、トレッドラバー変形は、以下の(10)式となる。
【0022】
x−x’=((u−R0・ω)/(R0・ω))・(R0・ω)・Δt
=s・x’ …(10)
但し、sは駆動時の縦方向のタイヤのすべり率で、
s=(u−R0・ω)/(R0・ω) …(11)
である。
【0023】
従って、P点に働く、単位幅、単位長さあたりのx方向の力σxは、
σx=−Kx・s・x’ …(12)
となる。但し、Kxは単位幅、長さあたりのトレッドラバーの縦方向の剛性である。ここで、タイヤの接地圧分布を考えると、
p=(6・Fz/b・L)・(x’/L)・(1−(x’/L)) …(13)
ここで、bは接地面幅、Lは接地面長さである。
【0024】
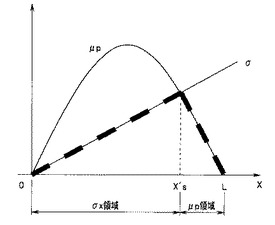
接地圧による接地面内各部分の最大摩擦力の分布μpとσの大小関係により、0≦x’<x’sで示される粘着域の範囲のタイヤの接地面に働く力は、上述の(12)式で表され、x’≧x’sとなるすべり域の範囲ではμpで表されることになる。従って、粘着域での接地面に働くx方向力はσx、すべり領域でのそれはμpとなる(図5参照)。
【0025】
ところで、σ=μpに、上述の(12)、(13)式を代入してx’sを求め、これを無次元表示したものをξsとすれば、
ξs=x’s/L=1−(Ks/(3・μ・Fz))・λ …(14)
となる。ここで、
λ=s、Ks=b・L2/2・Kx …(15)
である。
【0026】
以上よりタイヤ接地面全体に働くx方向の力(前後力Fx)は、ξs>0、つまり、接地面が粘着域とすべり域からなるときには、
Fx=b・∫(σx)dx(但し、積分範囲は0〜xs) …(16)
である。
【0027】
また、ξs≦0、つまり、接地面が全てすべり域となる場合には、
Fx=∫(−μp)dx’(但し、積分範囲は0〜L) …(17)
上述の(16)、(17)式に、前述の(12)、(13)、(14)式を代入して、以下の(18)、(19)式を得る。
【0028】
・ξs=1−(Ks/(3・μ・Fz))・λ>0のとき
Fx=−Ks・s・ξs2−6・μ・Fz・((1/6)
−(1/2)・ξs2+(1/3)・ξs3) …(18)
ここで、Fzはタイヤ(4輪分)の接地荷重(車体質量mで近似することも可)である。
【0029】
・ξs=1−(Ks/(3・μ・Fz))・λ<0のとき
Fx=−μ・Fz …(19)
【0030】
これら(18)、(19)式に対し、(15)式の左式から(14)式は、以下の(20)式となる。
ξs=1−(Ks/(3・μ・Fz))・|s| …(20)
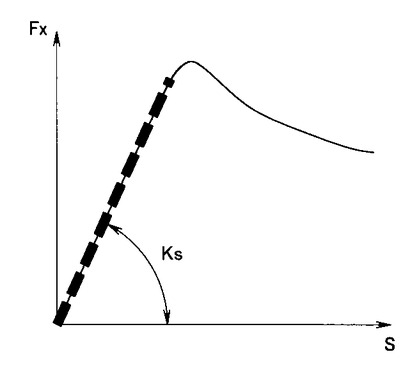
ここで、エンジンからタイヤに伝達される推定前後力をFmとし、推定前後力Fmが、Ksの比例領域(図6中の破線領域)とすると、Fm=−Ks・sとなるので、上述の(20)式は、以下の(21)式となる。
ξs=1−(|Fm|/(3・μ・Fz)) …(21)
【0031】
同様に、上述の(18)式を変形すると、以下の(22)式が得られる。
Fx=Fm・ξs2−6・μ・Fz・((1/6)
−(1/2)・ξs2+(1/3)・ξs3) …(22)
これら(21)、(22)式により、前後力Fxは、FmとFzとμの式として扱えるようになる。すなわち、タイヤが発生する理想的な前後力(理想前後力)Fmdは、上述の(21)、(22)式により、以下の(23)式により求められる。
Fmd=Fm・ξs2−6・μ・Fz・((1/6)
−(1/2)・ξs2+(1/3)・ξs3) …(23)
但し、ξs=1−(|Fm|/(3・μ・Fz)) …(24)
【0032】
そして、前述の実前後力Fmsと理想前後力Fmdがほぼ同じくなるような(23)、(24)式における路面μを探し出せば、路面μを推定できることになる。
【0033】
これは、実前後力Fmsと理想前後力Fmdとの偏差を最小にするような評価関数を設定し、収束演算を行うことで最適解を路面μとして求めることである。この偏差を最小にするような評価関数を設定し、収束演算を行う方法として最適化手法があり、本実施の形態では二乗誤差を最小化する解を求める最急降下法を用いるものとなっている。
【0034】
以下(25)式に評価関数L[n]を示す。評価関数L[n]は、実前後力Fmsと理想前後力Fmdとの偏差を小さくする項(第1の評価関数)と、路面μ推定値の変化量δμを少なくする項(第2の評価関数)で構成される(すなわち、全体で第3の評価関数とする)。
L[n]=[Fmsve−Fmdve[n]]TW1ve[Fmsve−Fmdve[n]]+W2・δμ2
…(25)
【0035】
具体的には、以下の(26)式により、路面μが微小変化した時の、理想前後力Fmdveの変化量を要素とするベクトルであるヤコビアンJve[n-1]を、路面μ推定値の前回値μ[n-1]を使って演算する。尚、ヤコビアンJve[n-1]の添字[n-1]は、路面μ推定値の前回値μ[n-1]を表すものであり、反復演算n−1=0の場合は、路面μ推定値の前回値μ[n-1]が無いため、先のサンプリング時における路面μの推定結果μ[z-1]を代入する。
【0036】
ヤコビアンJve[n-1]の各要素は、以下の各式で求められるものである。
【0037】
(∂Fmd[0]/∂μ[n-1])=(Fm[0]2/(Fz・μ[n-1]))
・(−1+(1/27)・(Fm[0]/(Fz・μ[n-1])))
(∂Fmd[1]/∂μ[n-1])=(Fm[1]2/(Fz・μ[n-1]))
・(−1+(1/27)・(Fm[1]/(Fz・μ[n-1])))
:
(∂Fmd[m]/∂μ[n-1])=(Fm[m]2/(Fz・μ[n-1]))
・(−1+(1/27)・(Fm[m]/(Fz・μ[n-1])))
:
(∂Fmd[18]/∂μ[n-1])=(Fm[18]2/(Fz・μ[n-1]))
・(−1+(1/27)・(Fm[18]/(Fz・μ[n-1])))
(∂Fmd[19]/∂μ[n-1])=(Fm[19]2/(Fz・μ[n-1]))
・(−1+(1/27)・(Fm[19]/(Fz・μ[n-1])))
【0038】
尚、Fmd[0]〜Fmd[19]は、理想前後力Fmdveの各成分(詳しくは後述する)である。
【0039】
次に、以下の(27)式により、路面μ推定値の変化量δμを演算する。
δμ=[Jve[n-1]TW1veJve[n-1]+W2]−1
Jve[n-1]TW1ve[Fmsve−Fmdve[n-1]] …(27)
ここで、W2は実験的に定める固定値である。
【0040】
次いで、以下の(28)式により、路面μ推定値μ[n]を演算する。
μ[n]=μ[n-1]+δμ …(28)
【0041】
次に、上述の(28)式で演算した路面μ推定値μ[n]を用いて、理想前後力Fmdve[n]を演算する。尚、反復演算回数n=0の場合は、前サンプリング時間における推定結果を代入する。
【0042】
ここで、Fmdve[n]の各要素は、次式で演算される。 すなわち、前述のタイヤモデルからの(23)、(24)式により、
Fmd[0][n]=Fm[0]−(Fm[0]2/(Fz・μ[n]))
+(1/27)・(Fm[0]3/(Fz2・μ[n]2)) …(30)
同様に、Fmd[1][n]〜Fmd[19][n]も演算される。
【0043】
次いで、前述の(25)式で示す評価関数L[n]を演算して、この評価関数の前回値L[n-1]と今回値L[n]とを比較して、予め設定した値ε未満に収束しているか否か判定し、収束している場合は、そこで収束演算を止め、演算された路面μ推定値μ[n]を今回の路面μ推定値μ[z]として出力する。また、ε未満に収束していない場合は、再び、ヤコビアンJve[n-1]からの演算を繰り返す。このように、路面μ演算部10dは、理想前後力算出手段、路面摩擦係数推定手段としての機能を有している。
【0044】
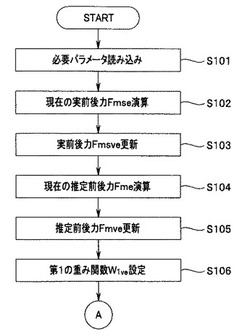
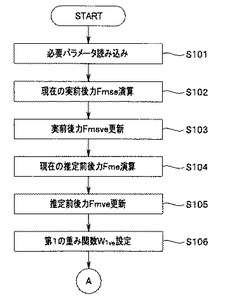
次に、路面μ推定装置10で実行される路面摩擦係数推定プログラムを、図2、図3のフローチャートで説明する。
【0045】
まず、ステップ(以下、「S」と略称)101で、必要なパラメータ、すなわち、前後加速度Ax、エンジン回転数Ne、エンジントルクTeg、主変速ギヤ比i、トルクコンバータのタービン回転数Ntを読み込む。
【0046】
次いで、S102に進み、実前後力演算部10aは、現在の実前後力Fmseを、前述の(1)式により演算する。
【0047】
次に、S103に進み、実前後力演算部10aは、前述の(3)式により、実前後力Fmsveを更新する。
【0048】
次いで、S104に進み、推定前後力演算部10bは、現在のエンジンからタイヤに伝達される前後力(推定前後力)Fmeを、前述の(4)式により演算する。
【0049】
次に、S105に進み、推定前後力演算部10bは、推定前後力Fmveを前述の(6)式の如く更新する。
【0050】
次いで、S106に進み、重み関数設定部10cは、図7に示すマップ等を参照して、前述の(7)式に示すような、実前後力Fmsve、推定前後力Fmveのデータ数と同じ行数、列数を持つ正方行列である、第1の重み関数W1veを設定する。
【0051】
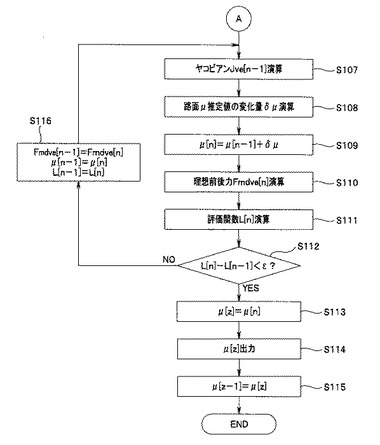
次に、S107に進むと、路面μ演算部10dは、前述した(26)式により、路面μが微小変化した時の、理想前後力Fmdveの変化量を要素とするベクトルであるヤコビアンJve[n-1]を、路面μ推定値の前回値μ[n-1]を使って演算する。
【0052】
次いで、S108に進み、路面μ演算部10dは、前述した(27)式により、路面μ推定値の変化量δμを演算する。
【0053】
次に、S109に進み、路面μ演算部10dは、前述した(28)式により、路面μ推定値μ[n]を演算する。
【0054】
次いで、S110に進み、路面μ演算部10dは、タイヤモデルにより、前述した(30)式により、(29)式で示す理想前後力Fmdve[n]を演算する。
【0055】
次に、S111に進み、路面μ演算部10dは、前述した(25)式による評価関数L[n]を演算する。
【0056】
そして、S112に進み、評価関数の前回値L[n-1]と今回値L[n]とを比較して、予め設定した値ε未満に収束しているか否か(L[n]−L[n-1]<εか否か)を判定し、収束している場合は、S113に進んで、路面μ推定値μ[n]を今回の路面μ推定値μ[z]として設定し(μ[z]=μ[n])、収束していない場合は、S116に進んで、Fmdve[n-1]=Fmdve[n]、μ[n-1]=μ[n]、L[n-1]=L[n]と設定して、再び、S107からの演算を繰り返す。
【0057】
S113で、今回の路面μ推定値μ[z]を設定した後は、S114に進み、今回の路面μ推定値μ[z]を出力し、S115に進んで、今回の路面μ推定値μ[z]を前回の路面μ推定値μ[z-1]と更新して(μ[z-1]=μ[z])、プログラムを抜ける。
【0058】
このように、本発明の実施の形態によれば、サンプリング時間毎にタイヤが発生している実際の前後力を実前後力Fmsveとして算出し、実前後力Fmsveと同じタイミングで路面μをパラメータとして含むタイヤモデルによりタイヤが発生する理想的な前後力を理想前後力Fmdveとして算出して、少なくともサンプリング時間毎の実前後力Fmsveと理想前後力Fmdveとの偏差の二乗和が最小となるように路面μの値を最適化計算により求めるようになっている。このため、レスポンス良く、精度の良い路面μを推定することが可能となる。
【0059】
尚、本実施の形態では、評価関数L[n]の収束判定を、ε未満になるまで行うようにしているが、収束演算の回数を予め設定しておくようにしても良い。また、演算回数の制限値を設けておいても良い。
【図面の簡単な説明】
【0060】
【図1】路面摩擦係数推定装置の機能ブロック図
【図2】路面摩擦係数推定プログラムのフローチャート
【図3】図2から続くフローチャート
【図4】タイヤのブラシモデルの説明図
【図5】タイヤの接地面内に働く力の分布の説明図
【図6】スリップ率に対する前後力の特性を示す説明図
【図7】推定前後力に応じて設定される重み係数の説明図
【符号の説明】
【0061】
10 路面μ推定装置
10a 実前後力演算部(実前後力算出手段)
10b 推定前後力演算部
10c 重み関数設定部
10d 路面μ演算部(理想前後力算出手段、路面摩擦係数推定手段)
11 前後加速度センサ
12 エンジン回転数センサ
13 エンジン制御部
14 トランスミッション制御部
【技術分野】
【0001】
本発明は、タイヤ前後力を基に路面摩擦係数を推定する路面摩擦係数推定装置に関する。
【背景技術】
【0002】
近年、車両においてはトラクション制御、制動力制御、トルク配分制御等について様々な制御技術が提案され、実用化されている。これらの技術では、必要な制御量の演算、或いは、補正に路面摩擦係数(以下、路面μと略称)を用いるものも多く、その制御を確実に実行するためには、正確な路面μを推定する必要がある。
【0003】
例えば、特開2005−7972号公報では、車体速度を測定し、車体加速度を算出し、左右駆動輪のそれぞれの車輪速度と車体速度との差分によって、左右駆動輪のそれぞれのスリップ率を算出し、車体加速度に対するそれぞれのスリップ率の比率をスリップ比とし、これらスリップ比の勾配の大きさから左右駆動輪のそれぞれの路面μを推定する技術が開示されている。
【特許文献1】特開2005−7972号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の特許文献1に開示される技術のように、車体速度を測定し、スリップ率を算出して路面μを推定する技術では、必要なパラメータを精度良く検出して精度良く路面μを推定することが困難で、また、路面μを精度良く求めようとするとレスポンス良く推定することができないという問題がある。
【0005】
本発明は上記事情に鑑みてなされたもので、レスポンス良く、精度の良い路面μを推定することができる路面摩擦係数推定装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明は、サンプリング時間毎にタイヤが発生している実際の前後力を実前後力として算出する実前後力算出手段と、上記実前後力と同じタイミングで路面摩擦係数をパラメータとして含むタイヤモデルにより上記タイヤが発生する理想的な前後力を理想前後力として算出する理想前後力算出手段と、少なくとも上記サンプリング時間毎の上記実前後力と上記理想前後力との偏差の二乗和が最小となるように上記路面摩擦係数の値を最適化計算により求める路面摩擦係数推定手段とを備えたことを特徴としている。
【発明の効果】
【0007】
本発明による路面摩擦係数推定装置によれば、レスポンス良く、精度の良い路面μを推定することが可能となる。
【発明を実施するための最良の形態】
【0008】
以下、図面に基づいて本発明の実施の形態を説明する。
図1〜図7は本発明の実施の一形態を示し、図1は路面摩擦係数推定装置の機能ブロック図、図2は路面摩擦係数推定プログラムのフローチャート、図3は図2から続くフローチャート、図4はタイヤのブラシモデルの説明図、図5はタイヤの接地面内に働く力の分布の説明図、図6はスリップ率に対する前後力の特性を示す説明図、図7は推定前後力に応じて設定される重み係数の説明図である。
【0009】
図1において、符号10は路面μを推定する路面μ推定装置を示し、前後加速度センサ11、エンジン回転数センサ12、エンジン制御部13、トランスミッション制御部14が接続されており、それぞれ前後加速度Ax、エンジン回転数Ne、エンジントルクTeg、主変速ギヤ比i、トルクコンバータのタービン回転数Ntが入力される。
【0010】
路面μ推定装置10は、上述の各入力信号に基づき、後述する路面摩擦係数推定プログラムに従って、サンプリング時間毎にタイヤが発生している実際の前後力を実前後力Fmsveとして算出し、実前後力Fmsveと同じタイミングで路面μをパラメータとして含むタイヤモデルによりタイヤが発生する理想的な前後力を理想前後力Fmdveとして算出して、少なくともサンプリング時間毎の実前後力Fmsveと理想前後力Fmdveとの偏差の二乗和が最小となるように路面μの値を最適化計算により求めるように構成されている。
【0011】
すなわち、路面μ推定装置10は、図1に示すように、実前後力演算部10a、推定前後力演算部10b、重み関数設定部10c、路面μ演算部10dから主要に構成されている。
【0012】
実前後力演算部10aは、前後加速度センサ11から前後加速度Axが入力される。そして、例えば、以下の(1)式により、現在の実前後力Fmseを演算する。
Fmse=m・Ax …(1)
ここで、mは車両質量である。
【0013】
また、実前後力演算部10aは、現在の実前後力Fmseを演算すると、過去に演算したサンプリング時間の異なる複数の実前後力により、ベクトル量である実前後力Fmsveを新たに設定する。本実施の形態では、実前後力Fmsveの例として、新しくサンプリングされた順に、Fms[0]、Fms[1]、・・・、Fms[m]、・・・、Fms[18]、Fms[19]の合計20個の成分から構成されているもので説明する。すなわち、
であり、新たに、実前後力Fmseが算出されると、
と更新される。上述のように演算される実前後力Fmsveは路面μ演算部10dに出力される。このように、実前後力演算部10aは、実前後力算出手段として設けられている。
【0014】
推定前後力演算部10bは、エンジン回転数センサ12からエンジン回転数Neが入力され、エンジン制御部13からエンジントルクTegが入力され、トランスミッション制御部14から主変速ギヤ比i、トルクコンバータのタービン回転数Ntが入力される。そして、例えば、以下の(4)式により、現在のエンジンからタイヤに伝達される前後力(推定前後力)Fmeを演算する。
Fme=Teg・t・i・η・if/Rt …(4)
ここで、tはトルクコンバータのトルク比であり、予め設定されている、トルクコンバータの回転速度比e(=Nt/Ne)とトルクコンバータのトルク比とのマップを参照することにより求められる。また、ηは駆動系伝達効率、ifはファイナルギヤ比、Rtはタイヤ半径である。
【0015】
また、推定前後力演算部10bは、現在の推定前後力Fmeを演算すると、過去に演算したサンプリング時間の異なる複数の推定前後力により、ベクトル量である推定前後力Fmveを新たに設定する。本実施の形態では、推定前後力Fmveの例として、新しくサンプリングされた順に、Fm[0]、Fm[1]、・・・、Fm[m]、・・・、Fm[18]、Fm[19]の合計20個の成分から構成されているもので説明する。すなわち、
であり、新たに、推定前後力Fmeが算出されると、
と更新される。上述のように演算される現在の推定前後力Fmeは、重み関数設定部10c、路面μ演算部10dに出力され、推定前後力Fmveは路面μ演算部10dに出力される。
【0016】
重み関数設定部10cは、推定前後力演算部10bからサンプリング時間毎の現在の推定前後力Fmeが入力される。そして、以下の(7)式に示すように、上述の実前後力Fmsve、推定前後力Fmveのデータ数と同じ行数、列数を持つ正方行列である、第1の重み関数W1veを設定し、路面μ演算部10dに出力する。
【0017】
ここで、第1の重み関数W1veを構成する各成分は、例えば、図7のマップを参照して設定される値であり、S/N比が悪く誤差が大きいと考えられる推定前後力の小さい領域、及び、明らかに誤った値であると考えられる推定前後力の大きな領域では0に設定されるようにして、そのサンプリング時間におけるデータが路面μの推定に影響を与えないようにする。尚、その他にも車速が小さい領域のデータを無効にする、車体すべり角が大きい場合のデータを無効にする(横力が大きいと精度が低下することを考慮)、又は、サンプリング時間の古いデータを無効にする等をこの第1の重み関数W1veの成分に含ませるようにしても良い。
【0018】
路面μ演算部10dは、実前後力演算部10aから実前後力Fmsveが入力され、推定前後力演算部10bから推定前後力Fmveが入力され、重み関数設定部10cから第1の重み関数W1veが入力される。
【0019】
まず、本実施形態における路面μ推定の主要なロジックについて、図4のタイヤのブラシモデルで説明する。図4において、車体の前後方向をx軸として、時間Δtの間にO点(接地開始点)から入った接地点の進む距離、P点のx座標は、
x=u・Δt …(8)
である。ここで、uは車体速度である。
【0020】
また、O’点(接地開始点Oのトレッドベース上の点)から入ったP’点のx座標は、
x’=R0・ω・Δt …(9)
である。ここで、R0はタイヤの有効転がり半径、ωはタイヤ回転速度である。
【0021】
従って、P点とP’点のx方向の相対変位、つまり、トレッドラバー変形は、以下の(10)式となる。
【0022】
x−x’=((u−R0・ω)/(R0・ω))・(R0・ω)・Δt
=s・x’ …(10)
但し、sは駆動時の縦方向のタイヤのすべり率で、
s=(u−R0・ω)/(R0・ω) …(11)
である。
【0023】
従って、P点に働く、単位幅、単位長さあたりのx方向の力σxは、
σx=−Kx・s・x’ …(12)
となる。但し、Kxは単位幅、長さあたりのトレッドラバーの縦方向の剛性である。ここで、タイヤの接地圧分布を考えると、
p=(6・Fz/b・L)・(x’/L)・(1−(x’/L)) …(13)
ここで、bは接地面幅、Lは接地面長さである。
【0024】
接地圧による接地面内各部分の最大摩擦力の分布μpとσの大小関係により、0≦x’<x’sで示される粘着域の範囲のタイヤの接地面に働く力は、上述の(12)式で表され、x’≧x’sとなるすべり域の範囲ではμpで表されることになる。従って、粘着域での接地面に働くx方向力はσx、すべり領域でのそれはμpとなる(図5参照)。
【0025】
ところで、σ=μpに、上述の(12)、(13)式を代入してx’sを求め、これを無次元表示したものをξsとすれば、
ξs=x’s/L=1−(Ks/(3・μ・Fz))・λ …(14)
となる。ここで、
λ=s、Ks=b・L2/2・Kx …(15)
である。
【0026】
以上よりタイヤ接地面全体に働くx方向の力(前後力Fx)は、ξs>0、つまり、接地面が粘着域とすべり域からなるときには、
Fx=b・∫(σx)dx(但し、積分範囲は0〜xs) …(16)
である。
【0027】
また、ξs≦0、つまり、接地面が全てすべり域となる場合には、
Fx=∫(−μp)dx’(但し、積分範囲は0〜L) …(17)
上述の(16)、(17)式に、前述の(12)、(13)、(14)式を代入して、以下の(18)、(19)式を得る。
【0028】
・ξs=1−(Ks/(3・μ・Fz))・λ>0のとき
Fx=−Ks・s・ξs2−6・μ・Fz・((1/6)
−(1/2)・ξs2+(1/3)・ξs3) …(18)
ここで、Fzはタイヤ(4輪分)の接地荷重(車体質量mで近似することも可)である。
【0029】
・ξs=1−(Ks/(3・μ・Fz))・λ<0のとき
Fx=−μ・Fz …(19)
【0030】
これら(18)、(19)式に対し、(15)式の左式から(14)式は、以下の(20)式となる。
ξs=1−(Ks/(3・μ・Fz))・|s| …(20)
ここで、エンジンからタイヤに伝達される推定前後力をFmとし、推定前後力Fmが、Ksの比例領域(図6中の破線領域)とすると、Fm=−Ks・sとなるので、上述の(20)式は、以下の(21)式となる。
ξs=1−(|Fm|/(3・μ・Fz)) …(21)
【0031】
同様に、上述の(18)式を変形すると、以下の(22)式が得られる。
Fx=Fm・ξs2−6・μ・Fz・((1/6)
−(1/2)・ξs2+(1/3)・ξs3) …(22)
これら(21)、(22)式により、前後力Fxは、FmとFzとμの式として扱えるようになる。すなわち、タイヤが発生する理想的な前後力(理想前後力)Fmdは、上述の(21)、(22)式により、以下の(23)式により求められる。
Fmd=Fm・ξs2−6・μ・Fz・((1/6)
−(1/2)・ξs2+(1/3)・ξs3) …(23)
但し、ξs=1−(|Fm|/(3・μ・Fz)) …(24)
【0032】
そして、前述の実前後力Fmsと理想前後力Fmdがほぼ同じくなるような(23)、(24)式における路面μを探し出せば、路面μを推定できることになる。
【0033】
これは、実前後力Fmsと理想前後力Fmdとの偏差を最小にするような評価関数を設定し、収束演算を行うことで最適解を路面μとして求めることである。この偏差を最小にするような評価関数を設定し、収束演算を行う方法として最適化手法があり、本実施の形態では二乗誤差を最小化する解を求める最急降下法を用いるものとなっている。
【0034】
以下(25)式に評価関数L[n]を示す。評価関数L[n]は、実前後力Fmsと理想前後力Fmdとの偏差を小さくする項(第1の評価関数)と、路面μ推定値の変化量δμを少なくする項(第2の評価関数)で構成される(すなわち、全体で第3の評価関数とする)。
L[n]=[Fmsve−Fmdve[n]]TW1ve[Fmsve−Fmdve[n]]+W2・δμ2
…(25)
【0035】
具体的には、以下の(26)式により、路面μが微小変化した時の、理想前後力Fmdveの変化量を要素とするベクトルであるヤコビアンJve[n-1]を、路面μ推定値の前回値μ[n-1]を使って演算する。尚、ヤコビアンJve[n-1]の添字[n-1]は、路面μ推定値の前回値μ[n-1]を表すものであり、反復演算n−1=0の場合は、路面μ推定値の前回値μ[n-1]が無いため、先のサンプリング時における路面μの推定結果μ[z-1]を代入する。
【0036】
ヤコビアンJve[n-1]の各要素は、以下の各式で求められるものである。
【0037】
(∂Fmd[0]/∂μ[n-1])=(Fm[0]2/(Fz・μ[n-1]))
・(−1+(1/27)・(Fm[0]/(Fz・μ[n-1])))
(∂Fmd[1]/∂μ[n-1])=(Fm[1]2/(Fz・μ[n-1]))
・(−1+(1/27)・(Fm[1]/(Fz・μ[n-1])))
:
(∂Fmd[m]/∂μ[n-1])=(Fm[m]2/(Fz・μ[n-1]))
・(−1+(1/27)・(Fm[m]/(Fz・μ[n-1])))
:
(∂Fmd[18]/∂μ[n-1])=(Fm[18]2/(Fz・μ[n-1]))
・(−1+(1/27)・(Fm[18]/(Fz・μ[n-1])))
(∂Fmd[19]/∂μ[n-1])=(Fm[19]2/(Fz・μ[n-1]))
・(−1+(1/27)・(Fm[19]/(Fz・μ[n-1])))
【0038】
尚、Fmd[0]〜Fmd[19]は、理想前後力Fmdveの各成分(詳しくは後述する)である。
【0039】
次に、以下の(27)式により、路面μ推定値の変化量δμを演算する。
δμ=[Jve[n-1]TW1veJve[n-1]+W2]−1
Jve[n-1]TW1ve[Fmsve−Fmdve[n-1]] …(27)
ここで、W2は実験的に定める固定値である。
【0040】
次いで、以下の(28)式により、路面μ推定値μ[n]を演算する。
μ[n]=μ[n-1]+δμ …(28)
【0041】
次に、上述の(28)式で演算した路面μ推定値μ[n]を用いて、理想前後力Fmdve[n]を演算する。尚、反復演算回数n=0の場合は、前サンプリング時間における推定結果を代入する。
【0042】
ここで、Fmdve[n]の各要素は、次式で演算される。 すなわち、前述のタイヤモデルからの(23)、(24)式により、
Fmd[0][n]=Fm[0]−(Fm[0]2/(Fz・μ[n]))
+(1/27)・(Fm[0]3/(Fz2・μ[n]2)) …(30)
同様に、Fmd[1][n]〜Fmd[19][n]も演算される。
【0043】
次いで、前述の(25)式で示す評価関数L[n]を演算して、この評価関数の前回値L[n-1]と今回値L[n]とを比較して、予め設定した値ε未満に収束しているか否か判定し、収束している場合は、そこで収束演算を止め、演算された路面μ推定値μ[n]を今回の路面μ推定値μ[z]として出力する。また、ε未満に収束していない場合は、再び、ヤコビアンJve[n-1]からの演算を繰り返す。このように、路面μ演算部10dは、理想前後力算出手段、路面摩擦係数推定手段としての機能を有している。
【0044】
次に、路面μ推定装置10で実行される路面摩擦係数推定プログラムを、図2、図3のフローチャートで説明する。
【0045】
まず、ステップ(以下、「S」と略称)101で、必要なパラメータ、すなわち、前後加速度Ax、エンジン回転数Ne、エンジントルクTeg、主変速ギヤ比i、トルクコンバータのタービン回転数Ntを読み込む。
【0046】
次いで、S102に進み、実前後力演算部10aは、現在の実前後力Fmseを、前述の(1)式により演算する。
【0047】
次に、S103に進み、実前後力演算部10aは、前述の(3)式により、実前後力Fmsveを更新する。
【0048】
次いで、S104に進み、推定前後力演算部10bは、現在のエンジンからタイヤに伝達される前後力(推定前後力)Fmeを、前述の(4)式により演算する。
【0049】
次に、S105に進み、推定前後力演算部10bは、推定前後力Fmveを前述の(6)式の如く更新する。
【0050】
次いで、S106に進み、重み関数設定部10cは、図7に示すマップ等を参照して、前述の(7)式に示すような、実前後力Fmsve、推定前後力Fmveのデータ数と同じ行数、列数を持つ正方行列である、第1の重み関数W1veを設定する。
【0051】
次に、S107に進むと、路面μ演算部10dは、前述した(26)式により、路面μが微小変化した時の、理想前後力Fmdveの変化量を要素とするベクトルであるヤコビアンJve[n-1]を、路面μ推定値の前回値μ[n-1]を使って演算する。
【0052】
次いで、S108に進み、路面μ演算部10dは、前述した(27)式により、路面μ推定値の変化量δμを演算する。
【0053】
次に、S109に進み、路面μ演算部10dは、前述した(28)式により、路面μ推定値μ[n]を演算する。
【0054】
次いで、S110に進み、路面μ演算部10dは、タイヤモデルにより、前述した(30)式により、(29)式で示す理想前後力Fmdve[n]を演算する。
【0055】
次に、S111に進み、路面μ演算部10dは、前述した(25)式による評価関数L[n]を演算する。
【0056】
そして、S112に進み、評価関数の前回値L[n-1]と今回値L[n]とを比較して、予め設定した値ε未満に収束しているか否か(L[n]−L[n-1]<εか否か)を判定し、収束している場合は、S113に進んで、路面μ推定値μ[n]を今回の路面μ推定値μ[z]として設定し(μ[z]=μ[n])、収束していない場合は、S116に進んで、Fmdve[n-1]=Fmdve[n]、μ[n-1]=μ[n]、L[n-1]=L[n]と設定して、再び、S107からの演算を繰り返す。
【0057】
S113で、今回の路面μ推定値μ[z]を設定した後は、S114に進み、今回の路面μ推定値μ[z]を出力し、S115に進んで、今回の路面μ推定値μ[z]を前回の路面μ推定値μ[z-1]と更新して(μ[z-1]=μ[z])、プログラムを抜ける。
【0058】
このように、本発明の実施の形態によれば、サンプリング時間毎にタイヤが発生している実際の前後力を実前後力Fmsveとして算出し、実前後力Fmsveと同じタイミングで路面μをパラメータとして含むタイヤモデルによりタイヤが発生する理想的な前後力を理想前後力Fmdveとして算出して、少なくともサンプリング時間毎の実前後力Fmsveと理想前後力Fmdveとの偏差の二乗和が最小となるように路面μの値を最適化計算により求めるようになっている。このため、レスポンス良く、精度の良い路面μを推定することが可能となる。
【0059】
尚、本実施の形態では、評価関数L[n]の収束判定を、ε未満になるまで行うようにしているが、収束演算の回数を予め設定しておくようにしても良い。また、演算回数の制限値を設けておいても良い。
【図面の簡単な説明】
【0060】
【図1】路面摩擦係数推定装置の機能ブロック図
【図2】路面摩擦係数推定プログラムのフローチャート
【図3】図2から続くフローチャート
【図4】タイヤのブラシモデルの説明図
【図5】タイヤの接地面内に働く力の分布の説明図
【図6】スリップ率に対する前後力の特性を示す説明図
【図7】推定前後力に応じて設定される重み係数の説明図
【符号の説明】
【0061】
10 路面μ推定装置
10a 実前後力演算部(実前後力算出手段)
10b 推定前後力演算部
10c 重み関数設定部
10d 路面μ演算部(理想前後力算出手段、路面摩擦係数推定手段)
11 前後加速度センサ
12 エンジン回転数センサ
13 エンジン制御部
14 トランスミッション制御部
【特許請求の範囲】
【請求項1】
サンプリング時間毎にタイヤが発生している実際の前後力を実前後力として算出する実前後力算出手段と、
上記実前後力と同じタイミングで路面摩擦係数をパラメータとして含むタイヤモデルにより上記タイヤが発生する理想的な前後力を理想前後力として算出する理想前後力算出手段と、
少なくとも上記サンプリング時間毎の上記実前後力と上記理想前後力との偏差の二乗和が最小となるように上記路面摩擦係数の値を最適化計算により求める路面摩擦係数推定手段と、
を備えたことを特徴とする路面摩擦係数推定装置。
【請求項2】
上記路面摩擦係数推定手段は、上記各サンプリング時間における上記偏差を二乗した値に、それぞれのサンプリング時間における計測条件に応じた重み関数を乗算した第1の評価関数と、前回算出した路面摩擦係数に対する今回の路面摩擦係数の修正量を二乗した値を含む第2の評価関数と、上記第1の評価関数と上記第2の評価関数との和である第3の評価関数とを求め、上記第3の評価関数を路面摩擦係数で偏微分した値が0となることを利用して上記路面摩擦係数の修正量を算出し、今回の路面摩擦係数を求めることを特徴とする請求項1記載の路面摩擦係数推定装置。
【請求項3】
上記重み関数は、エンジンからタイヤに伝達される前後力に応じて設定されることを特徴とする請求項2記載の路面摩擦係数推定装置。
【請求項1】
サンプリング時間毎にタイヤが発生している実際の前後力を実前後力として算出する実前後力算出手段と、
上記実前後力と同じタイミングで路面摩擦係数をパラメータとして含むタイヤモデルにより上記タイヤが発生する理想的な前後力を理想前後力として算出する理想前後力算出手段と、
少なくとも上記サンプリング時間毎の上記実前後力と上記理想前後力との偏差の二乗和が最小となるように上記路面摩擦係数の値を最適化計算により求める路面摩擦係数推定手段と、
を備えたことを特徴とする路面摩擦係数推定装置。
【請求項2】
上記路面摩擦係数推定手段は、上記各サンプリング時間における上記偏差を二乗した値に、それぞれのサンプリング時間における計測条件に応じた重み関数を乗算した第1の評価関数と、前回算出した路面摩擦係数に対する今回の路面摩擦係数の修正量を二乗した値を含む第2の評価関数と、上記第1の評価関数と上記第2の評価関数との和である第3の評価関数とを求め、上記第3の評価関数を路面摩擦係数で偏微分した値が0となることを利用して上記路面摩擦係数の修正量を算出し、今回の路面摩擦係数を求めることを特徴とする請求項1記載の路面摩擦係数推定装置。
【請求項3】
上記重み関数は、エンジンからタイヤに伝達される前後力に応じて設定されることを特徴とする請求項2記載の路面摩擦係数推定装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−120600(P2010−120600A)
【公開日】平成22年6月3日(2010.6.3)
【国際特許分類】
【出願番号】特願2008−298432(P2008−298432)
【出願日】平成20年11月21日(2008.11.21)
【出願人】(000005348)富士重工業株式会社 (3,010)
【公開日】平成22年6月3日(2010.6.3)
【国際特許分類】
【出願日】平成20年11月21日(2008.11.21)
【出願人】(000005348)富士重工業株式会社 (3,010)
[ Back to top ]