
路面欠陥検出システム及び方法
【課題】本発明は、赤外線撮影技術に基づく路面欠陥検出システム及び方法を提供する。
【解決手段】該システムは、被検出路面上を走行する検出用車両と、検出用車両に設けられ、該検出用車両に対して水平回転及び縦回転する雲台と、雲台に取り外し可能に設けられ、被検出路面の赤外線熱画像を撮影し、該赤外線熱画像に関する赤外線熱画像デジタル信号を出力するための赤外線熱画像装置と、検出用車両に設けられ、雲台と赤外線熱画像装置にそれぞれ接続され、赤外線熱画像装置の撮影動作及び雲台の水平回転角度と縦回転角度を制御し、上記赤外線熱画像デジタル信号を標準ネットワーク伝送用の赤外線デジタル信号に変換するためのマスタコントローラと、上記赤外線デジタル信号を受信して分析・処理を行なうことにより、被検出路面の欠陥の種類と欠陥の位置情報を特定するデータプロセッサとを含む。該システムは、操作性に優れ、欠陥のディテールを直観的に表示できる。
【解決手段】該システムは、被検出路面上を走行する検出用車両と、検出用車両に設けられ、該検出用車両に対して水平回転及び縦回転する雲台と、雲台に取り外し可能に設けられ、被検出路面の赤外線熱画像を撮影し、該赤外線熱画像に関する赤外線熱画像デジタル信号を出力するための赤外線熱画像装置と、検出用車両に設けられ、雲台と赤外線熱画像装置にそれぞれ接続され、赤外線熱画像装置の撮影動作及び雲台の水平回転角度と縦回転角度を制御し、上記赤外線熱画像デジタル信号を標準ネットワーク伝送用の赤外線デジタル信号に変換するためのマスタコントローラと、上記赤外線デジタル信号を受信して分析・処理を行なうことにより、被検出路面の欠陥の種類と欠陥の位置情報を特定するデータプロセッサとを含む。該システムは、操作性に優れ、欠陥のディテールを直観的に表示できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、路面欠陥と路面状態検出技術に係り、特にアスファルトの高速道路などの路面工事品質を監視するシステム及び方法に関する。
【背景技術】
【0002】
現在、国内外で高速道路などアスファルト路面又はその他の路面の路面欠陥を監視する場合、よく「人工による目視検出法」又は「赤外線熱差に基づく路面透水性評価及び関連補修技術」などを採用して、路面欠陥について迅速な検出と評価を行なう。
【0003】
「赤外線熱差に基づく路面透水性評価及び関連補修技術」に用いられる核となる装置は、赤外線温度測定装置(或いは赤外線ポイント温度測定装置)である。該技術に基づく路面欠陥検出システムにおいて、複数の赤外線温度測定装置を検出用車両後部に並べさせて固定させ、自動車走行中に距離センサを通して赤外線ポイント温度測定装置の稼動をトリガーし、高速道路など路面監視範囲内の温度値を採集し、複数のポイントにおける温度値で温度曲線を形成し、そして温度差異曲線で路面熱差(温度差)記録図を模擬して形成して路面の検出データとし、更に路面の損傷状況を判断する。
【0004】
赤外線温度測定装置は、その内部に取り付けられる光電探知器を利用して物体の表面温度を検知する装置であり、光電探知器から赤外線ビームが射出され、該射出ビームが物体表面に当たってから反射して戻り、再び光電探知器に集光する。上記射出ビームに比較して、返されたビームに付く赤外線熱エネルギーは、上記物体の材質や表面状態の相違により、異なる程度のエネルギーの損失が生じる。該光電探知器は、返された赤外線ビームのエネルギーを受信して対応する電気信号に変換し、該電気信号が再び検知対象の温度値に換算される。
【0005】
赤外線温度測定装置が物体表面のいずれのポイントの温度を逐一に測定するものとして用いられるため、射出ビームを物体表面のワンポイントに集光させることが理想的であり、このように測定された温度が該ポイントのもっとも正確な温度である。しかし、ビームが乱射するため、光電探知器から射出されたビームが一定の距離を経て最終的に物体表面に接触するときに、すでに一つのポイントに照射されるのではなく、一つの区域に照射されることになり、該区域の面積の大きさは、明らかに光電探知器と検知対象との距離(すなわち温度測定距離)に正比例する。従って、赤外線温度測定装置が実際に測定した温度は、ある区域の平均温度である。
【0006】
また、赤外線温度測定装置は、一回又は複数回の測定により被検出物体の一部のポイント(或いは区域)の温度を測定可能であるものの、被検出物体の直観的な画像又は被検出物体の構造的な特徴を現せる赤外線熱画像を提供することができないので、従来技術におけるこのような赤外線温度測定装置に基づく路面欠陥検出方式は、真の現場画像を参考としていないため、検出結果が直観的ではなく、路面欠陥の判断、位置決め及び分析が行なわれにくく、検出の漏洩や誤検出になりやすく、実際の検出と評価の需要を満足できない。
【0007】
たとえば、特許番号で中国特許200420041784号の特許文献「赤外線路面温度測定装置」において、路面欠陥検出システムが開示されており、該システムは、赤外線温度測定装置を利用してアスファルト路面の温度を採集し、温度差異に基づいて熱差記録図を形成し、定量、定性、位置決めの三つの方面から路面の透水区域を評価する。その主な稼動原理として、路面の密実度、透水率に不一致性が存在するため、雨の後に構造層内の水含有量が異なり、太陽光の照射で水分が蒸発して熱が持っていかれ、路面上の温度が異なるように表し、熱差記録図に対する分析から密実度の差異を判定できる。
【0008】
該システムの核となる検出設備として赤外線温度測定装置が用いられるため、その稼動原理から、温度測定しかできず、撮影できないことが決められたので、被検出物体の熱分布画像を直観的に反映することができない。また、赤外線温度測定装置が検出した赤外線デジタル信号が温度測定距離と正比例する区域(被検出区域)面積内の平均温度であるため、その温度測定結果の正確性には、一定の誤差が存在する。更に、赤外線温度測定装置が測定した温度値がポイントデータ(多くても小さい区域の赤外線デジタル信号であり、路面検出の精度要求に基づき、該区域があまり大きくならないほうがよい)のタイプであるため、一台の赤外線温度測定装置の検出面積が非常に限られており、たとえ一台の検出用車両に複数台の温度測定装置を多く取り付けても、一回で多くても一本の車線しか監視できないので、多車線路面の全面的検出を実現するには、時間と手間がかかるに違いない。たとえば、上記特許出願の明細書には、図1について「記録図区域は、温度差に基づいて形成した熱差記録図であり、赤色区域は高温区域を示し、青色区域は低温区域を示し、毎回一本の車線を検出する」と説明しているため、単一車線に対する検出しか実現できないことがわかる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】中国特許200420041784号
【発明の概要】
【発明が解決しようとする課題】
【0010】
上記問題を解決するために、本発明の目的は、赤外線撮影技術に基づく路面欠陥検出システムを提供し、赤外線熱画像技術を利用して高速道路などアスファルト路面又はその他の路面の欠陥を迅速かつ直観的に検出し、関連道路の透水、ひび割れ、ポットホール、ルース化、層間脱落など欠陥の補修に対して、正確な技術的な根拠を提供する。
【課題を解決するための手段】
【0011】
上記目的を達成するために、本発明は、赤外線撮影技術に基づく路面欠陥検出システムを提供する。該システムは、被検出路面上を走行する検出用車両と、該検出用車両に設けられ、該検出用車両に対して水平回転及び縦回転する雲台と、該雲台に取り外し可能に設けられ、上記被検出路面の赤外線熱画像を撮影し、温度値を含む該被検出路面の赤外線熱画像に関する赤外線熱画像デジタル信号を出力するための赤外線熱画像装置と、該検出用車両に設けられ、該雲台と該赤外線熱画像装置にそれぞれ接続され、該赤外線熱画像装置の撮影動作及び該雲台の水平回転角度と縦回転角度を制御し、該赤外線熱画像装置から出力された赤外線熱画像デジタル信号を標準ネットワーク伝送用の赤外線デジタル信号に変換するためのマスタコントローラと、上記赤外線熱画像装置に対する制御信号を生成して出力し、上記赤外線デジタル信号を受信して分析・処理を行なうことにより、上記被検出路面の欠陥の種類と欠陥の位置情報を特定するためのデータプロセッサとを含む。
【0012】
本発明の実施例に拠れば、該マスタコントローラは、該赤外線熱画像装置によって撮影した温度値を含む赤外線熱画像デジタル信号をUSB信号に変換するUSB信号変換ボードと、上記USB信号を伝送するためのUSBインタフェースと、該USBインタフェースからのUSB信号を標準ネットワーク伝送用の上記赤外線デジタル信号に変換して、リアルタイムでネットワーク回線を介して該データプロセッサに送信し、該データプロセッサからの距離測定信号に基づいて熱画像装置制御信号を生成して該赤外線熱画像装置に送信してその撮影動作を制御し、該データプロセッサからの雲台制御信号に基づいて雲台駆動信号を生成して該雲台に送信してその水平回転と縦回転を制御するデータ分析制御モジュールとを含む。
【0013】
本発明の実施例に拠れば、該雲台は、該検出用車両に固設される本体台座と、該本体台座の中に設けられる縦駆動モータと、該本体台座に設けられ、該縦駆動モータに連動して縦回転する縦回転機構と、該本体台座の中に設けられる水平駆動モータと、該縦回転機構に設けられ、該水平駆動モータに連動して水平回転するとともに、該縦回転機構に追従して縦回転する水平回転機構と、該水平回転機構に設けられ、該赤外線熱画像装置の本体を取り外し可能に固定するための固定用フレームとを含む。
【0014】
本発明の実施例に拠れば、該縦回転機構の回転速度は3〜5°/Sであり、縦回転角度の範囲は10〜90°である。
本発明の実施例に拠れば、該水平回転機構の回転速度は6〜12°/Sであり、水平回転角度の範囲は0〜355°である。
【0015】
本発明の実施例に拠れば、該データプロセッサは、該マスタコントローラからの赤外線デジタル信号を受信するデータ入力インタフェースと、データ入力インタフェースからの赤外線デジタル信号に対して、路面欠陥分析ソフトウェアを応用してスクリーンショット処理及びデータ分析を行ない、処理後データに基づいて、被検出路面上の欠陥の種類、欠陥の位置情報を特定するデータ分析モジュールと、上記処理後データ及び特定結果を記憶する記憶モジュールとを含む。
本発明の実施例に拠れば、該データプロセッサは、被検出路面の赤外線熱画像、赤外線デジタル信号、欠陥の種類、欠陥の発生位置及び対処提案を直観的に表示するための表示モジュールを更に含む。
【0016】
本発明の実施例に拠れば、該データプロセッサのデータ入力インタフェースは、RJ45標準ネットワークインタフェース経由で該マスタコントローラとの間にデータ伝送とネットワーク通信を実現する。
本発明の実施例に拠れば、該マスタコントローラと該データプロセッサは、具体的にノート型コンピュータである。
【0017】
本発明の実施例に拠れば、該システムは、該検出用車両の車輪に設けられ、該データプロセッサに接続される距離測定装置を更に含む。該データプロセッサは、該距離測定装置からの車両速度パルス信号を受信して距離測定信号に換算し、上記距離測定信号を該マスタコントローラに出力し、よって、該マスタコントローラは、上記距離測定信号に基づいて、熱画像装置制御信号を生成して該赤外線熱画像装置の撮影動作を制御する。
【0018】
本発明の実施例に拠れば、該距離測定装置は、たとえばホールセンサである。
本発明の実施例に拠れば、該システムは、該マスタコントローラと該データプロセッサにそれぞれ接続し、両者間のネットワーク通信を実現するデータ伝送装置を更に含む。
本発明の実施例に拠れば、該データ伝送装置は、ネットワーク回線経由で該マスタコントローラと該データプロセッサに接続するルータである。
【0019】
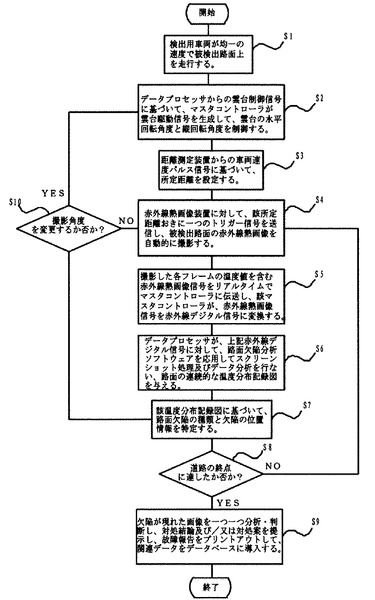
上記目的を達成するために、本発明は、赤外線撮影技術に基づく路面欠陥検出方法を更に提供する。該方法は、上記の赤外線撮影技術に基づく路面欠陥検出システムを応用して被検出路面の欠陥を検出する。該方法は、検出用車両が基本的に均一の時速で該被検出路面上を走行するステップ1と、データプロセッサからの雲台制御信号に基づいて、マスタコントローラが雲台駆動信号を生成して、雲台の水平回転と縦回転を駆動するステップ2と、距離測定装置からの車両速度パルス信号に基づいて、所定距離を設定するステップ3と、赤外線熱画像装置の撮影トリガー装置に対して、該所定距離おきに一つのトリガー信号を送信し、該赤外線熱画像装置が、上記トリガー信号に基づいて、該被検出路面の赤外線熱画像を自動的に撮影する。該赤外線熱画像が赤外線デジタル画像であり、各ポイントに具体的な温度値が含まれるステップ4と、該赤外線熱画像装置が、撮影した各フレームの温度値を含む赤外線熱画像デジタル信号をリアルタイムで該マスタコントローラにデータ線を介して伝送し、該マスタコントローラが、上記赤外線熱画像デジタル信号を標準ネットワーク伝送用の赤外線デジタル信号に変換して該データプロセッサに伝送するステップ5と、該データプロセッサが、上記赤外線デジタル信号に対して、路面欠陥分析ソフトウェアを応用してスクリーンショット処理及びデータ分析を行ない、被検出路面の連続的な温度分布記録図を与えるとともに、温度傾向分析曲線を取得し、路面撮影時間及び各ポイントの対応温度を正確に反映するステップ6と、該温度分布記録図における温度データに明らかな差異が現れるとき、該路面欠陥分析ソフトウェアを応用して路面欠陥の種類と欠陥の位置情報を特定するステップ7とを含む。
【0020】
本発明の実施例に拠れば、上記所定距離は、2メートルである。
本発明の実施例に拠れば、該方法は、ステップ7を実行した後、該検出用車両が被検出路面の終点に達したか否かを判断し、判断結果により、終点に達していないと示される場合、ステップ4に戻るステップ8を更に含む。
【0021】
本発明の実施例に拠れば、該方法は、ステップ8を実行した後、判断結果により終点に達したと示される場合、分析者が、欠陥が現れたすべての画像を一つ一つ分析・判断し、対処結論及び/又は採用されうる対処提案を提示し、故障報告をプリントアウトして保管し、該データプロセッサが、欠陥が現れた画像と関連データを路面欠陥分析ソフトウェアのデータベースに導入して記憶するステップ9を更に含む。
【0022】
本発明の実施例に拠れば、ステップ7において、異常変化のある温度分布記録図と温度曲線について、該データプロセッサが同時に自動警報を行なう。
本発明の実施例に拠れば、ステップ7において、該データプロセッサが、検出起点の座標、該所定距離の大きさ、及び欠陥あり画像がすべての画像において何枚目なのかの位置情報に基づいて、上記欠陥の位置情報を自動的に換算する。
本発明の実施例に拠れば、該方法は、ステップ7を実行した後、赤外線熱画像装置の撮影角度の変更が必要か否かを判断し、判断結果により必要であると示される場合、ステップ2に戻るが、判断結果により必要でないと示される場合、ステップ4に戻るステップ10を更に含む。
【発明の効果】
【0023】
上記の本発明の技術案によれば、下記の有益な効果を奏する。
第一、赤外線熱画像など情報採集技術と画像赤外線デジタル信号処理などの技術を駆使して、非接触の画像撮影を利用して、アスファルトの高速道路などの路面の迅速な検出を実現する。該システムの操作性が優れ、赤外撮影は、雲、雨、霧など天気の影響を受けず、赤外画像は鮮明であり、1つのフレームの画像採集時間が7msしかかからない。熱画像検出であるため、撮影した欠陥のディテールは、鮮明に見ることができ、欠陥の判断がより直接となる。
【0024】
第二、最先進的なセンシング技術を利用してトリガーして、均一距離又は均一間隔で温度監視装置に信号を伝送し、画像撮影の連続性を確保する。
第三、赤外線デジタル信号を分析処理して管理し、分析報告を生成して、路面の生じうる欠陥を迅速に発見し、従来の高速アスファルト道路の補修技術を改善した。
【図面の簡単な説明】
【0025】
【図1】本発明の路面欠陥検出システムのブロック図である。
【図2】図1に示す路面欠陥検出システムの各構成の接続関係図である。
【図3】本発明実施例による路面欠陥検出システムの稼働フローを示す。
【図4】本発明の一つの実施例における雲台の構造図である。
【図5】本発明の一つの実施例による路面欠陥検出システムの取り付け位置を示す図面である。
【図6】本発明の別の実施例による路面欠陥検出システムの取り付け位置を示す図面である。
【発明を実施するための形態】
【0026】
本発明の実施例の目的、技術案及び利点をより明確にするために、以下、実施例と図面を参照して、本発明の実施例を更に詳しく説明する。ここで、本発明の実施例及びその説明は、本発明を解釈するためのものであり、本発明を限定するものではない。
【0027】
高速道路の快速な発展と舗装里程の増加につれて、構造の選択がますます重要視され、工事の工程と工事の品質に対するコントロールもますます厳しくなっている。しかし、一部の道路では、開通1、2年後に、路面に透水、ひび割れ、ポットホール、わだち掘れ、網状ひび割れ、砂利などの噴出し、橋面破損などの損壊が生じることがある。これは、高速道路の安全、快速、快適な運転という使用機能を大きく低下させるだけではなく、道路の維持コストも増加させた。
【0028】
一般的に、アスファルト路面の損壊は、二種類ある。一つは、路面構造全体或いはその中の一つ又は複数の構成部分の損壊を含む構造性損壊である。該種類の損傷により、路面が所定の車両負荷に耐えなくなる。もう一種類の損壊は、機能性損壊であり、その発生に必ずしも構造性損壊が伴わないが、平坦性、滑り抵抗性などの要素の低下により、道路の所定の使用機能がなくなり、車両走行品質に影響を与える。
【0029】
機能性破損は、一般的に表面的なものであり、識別しやすく、その破損の原因も比較的に明白である。主に局部の微細状ひび割れ、波形状の隆起、ブリーディング、剥がれ、凹凸、摩損が挙げられる。これらの破損により、主に道路のサービス水準を低下させるが、一般的に路面の構造性能と直接的な関係を持たない。機能性損壊について、補修、維持又はコーティングにより、表面層の機能を回復させることができる。
【0030】
構造性破損は、主に路面各層内部の構造性欠陥及び負荷の応力増加によるものであり、路面上では、各種類の形状のひび割れ、変形及び変移などの損壊として反映される。主に亀裂、網状ひび割れ、縦方向・横方向のひび割れ、陥没、ポットホール、砂利などの噴出し、補修の損壊、ルーズ化及びわだち掘れなどが挙げられる。これらの破損により、道路のサービス水準を低下させるだけではなく、路面構造のベアリング力を明らかに低下させ、破損を悪化させ、最終的に路面の損壊をもたらす。構造性損壊に対して、通常道路を徹底的に修復することが必要となる。
【0031】
また、路面損壊の種類は、基礎層の種類、表面層の構造、負荷の種類、気候、工事過程、舗装効果などから影響を受ける。たとえば、断層的粗滑り抵抗構造のアスファルト表面層において、往々にして舗築層が厚いため透水、水溜りなど初期的な水害破壊が生じるが、温度差が大きい又は気温が低い気候条件の地域において、アスファルト路面に、温度応力により横又は縦方向のひび割れが生じ、これらのひび割れは、通常車両の作用を受けて折れたり、破裂したりする。
【0032】
上記の路面損壊種類を明確にすると、路面上の欠陥に対して対応した検出と対処を行なうことができるようになる。現在よく用いられる検出手段には、検出効率が低い、適用面が狭い、典型性が低い、コストが高い、及び路面を破壊するなどの多くの不備が存在するため、快速、簡単、効果的な道路無損傷検出技術を引き続き開発することが要求されている。
【0033】
赤外線熱画像装置は、工業又は民用の検出分野に広く応用されており、赤外線検出技術に基づいて物体の赤外線熱画像を撮影し、物体の位置及び稼働状態などを検出し、検出結果から被写体の赤外線デジタル信号を取得する。
【0034】
赤外線熱画像装置は、その稼働原理により、撮影もできるし、温度測定もできることが決められており、即ち、赤外線ポイント温度測定装置の温度測定機能を満足できるほか、被検出物体の赤外線熱分布画像を示すことができ、しかも、該赤外線熱分布画像には、検出物体の各ポイントの正確な赤外線デジタル信号が含まれる。従って、検出結果は正確かつ直観的であり、故障になりうるポイントに対して迅速な判断を行ないやすい。赤外線熱画像装置の光学メカニズムがカメラに近いため、レンズの視界角を調節することにより被検出物体の面積範囲を変更でき、赤外線熱画像装置を検出用車両の天井部に架設すれば、高速道路の四車線の路面を充分に同時検出できる。従って、赤外線熱画像装置を用いて路面欠陥を検出することは、大いに見込まれている。
【0035】
本発明の赤外線撮影技術に基づく路面検出システム及び方法は、上記の要求を満足できる新型道路無損傷検出技術と手段である。形成された赤外線熱画像を分析することにより、道路の欠陥を診断し、欠陥・破損原因に関する調査と研究を展開することができるようになり、切実で実行可能な予防性維持案を提出し、そして道路舗装品質を高め、道路の使用寿命を延長させ、真に「予防をメインに、予防と対処との両立」を実現する。
【0036】
赤外線熱撮影検出技術は、主に雨の後のアスファルト高速道路など表面温度を採集して、温度差異に基づいて赤外線熱画像を形成し、定量と定性の両面から路面の透水性と損害状況を評価する。たとえば亀裂、網状ひび割れ、陥没などの構造性破損について、ひびができて浸水するため、ほかの正常な路面との間に一定の温度差異が存在し、赤外線熱画像上に網状又はストライプ形状の低温線を表し、温度差異状況に基づいて、路面の損壊状況を大体判断でき、そして適切な補修方式を採用する。一方、波形状の隆起、ブリーディング、凹凸、摩損といった機能性破損について、ソフトシステムによる差異データの分析で分析報告を形成して保管し、保管されている赤外線熱画像を累積比較して、分析ソフトを用いて路面の欠陥の種類の最終的に分析して得られる。
【0037】
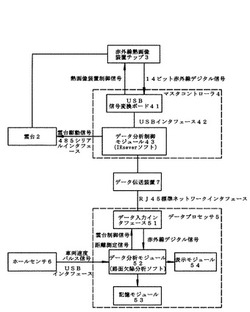
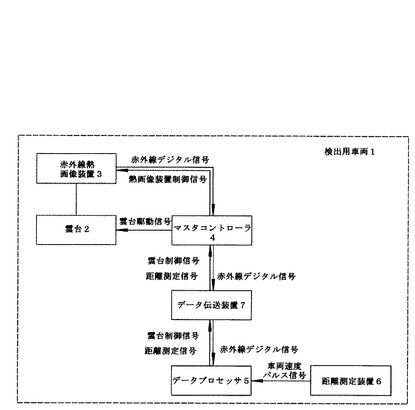
図1は、本発明の赤外線撮影技術に基づく路面欠陥検出システムのブロック図である。該システムは、相対的に均一の時速で被検出路面上を走行する検出用車両1と、該検出用車両1に設けられ、該検出用車両1に対して水平回転及び縦回転する雲台2と、該雲台2に取り外し可能に設けられ、上記被検出路面の赤外線熱画像を撮影し、温度値を含む該被検出路面の赤外線熱画像に関する赤外線熱画像デジタル信号(14ビットデジタル信号)を出力するための赤外線熱画像装置3と、該検出用車両1に設けられ、該雲台2と該赤外線熱画像装置3にそれぞれ接続され、撮影開始時間、終了時間、撮影トリガータイミング、レンズの焦点調整及び撮影範囲などを含む該赤外線熱画像装置3の撮影動作及び該雲台2の水平回転角度と縦回転角度を制御し、該赤外線熱画像装置3から出力された赤外線熱画像デジタル信号を標準ネットワーク伝送用の赤外線デジタル信号に変換するためのマスタコントローラ4と、上記赤外線熱画像装置3に対する制御信号を生成して出力し、上記赤外線デジタル信号を受信して分析・処理を行なうことにより、上記被検出路面の欠陥の種類と欠陥の位置情報を特定するためのデータプロセッサ5とを含む。
【0038】
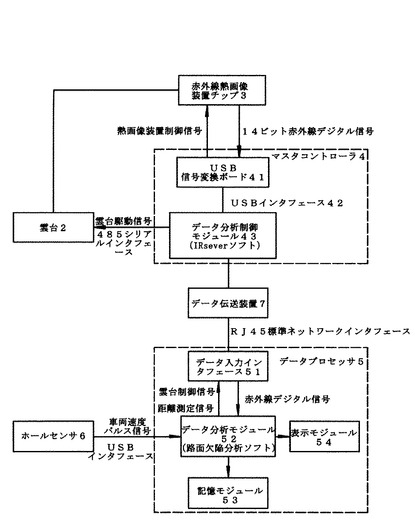
図2に示す実施例において、該マスタコントローラ4は、赤外線熱画像装置3からの赤外線熱画像デジタル信号をUSB信号に変換するUSB信号変換ボード41と、上記USB信号を伝送するためのUSBインタフェース42と、該USBインタフェース42からのUSB信号を、RJ45標準ネットワークインタフェース経由で伝送可能な赤外線デジタル信号にIrseverソフトウェアを応用して変換して、リアルタイムでネットワーク回線を介してデータプロセッサ5に送信し、データプロセッサ5からの距離測定信号に基づいて熱画像装置制御信号を生成して該赤外線熱画像装置3に送信してその撮影動作を制御し、データプロセッサ5からの雲台制御信号に基づいて雲台駆動信号を生成して485シリアルインタフェース経由で雲台2に送信してその水平回転と縦回転を制御するデータ分析制御モジュール43とを含む。
【0039】
該マスタコントローラ4は、たとえばAMD LX700チップで実現可能であるし、該マスタコントローラ4の上記機能を満足できるその他の種類のチップで実現してもよい。該マスタコントローラ4は、該赤外線熱画像装置3とともに全体的に一つの防護カバーに設けられる。
【0040】
データ分析制御モジュール43は、Irseverソフトウェアを起動し、赤外線熱画像装置3から受信した14ビットの赤外線デジタル信号(USB信号)を、RJ45標準ネットワーク信号に変換し、データプロセッサ5に送信して処理される。データプロセッサ5が送信した制御信号(たとえばチップの焦点調整、キャッチ、雲台回転など熱画像装置制御信号と雲台駆動信号)は、RJ45標準ネットワーク経由で該マスタコントローラ4に送信し、該マスタコントローラ4は、上記制御信号と駆動信号を受信してからUSB信号を送信し、赤外線熱画像装置の熱画像チップに対して一連の焦点調整などの動作を行なうように駆動し、更に485シリアルインタフェース経由で、一定角度範囲内の水平と縦回転を行なうように雲台2を制御する。
【0041】
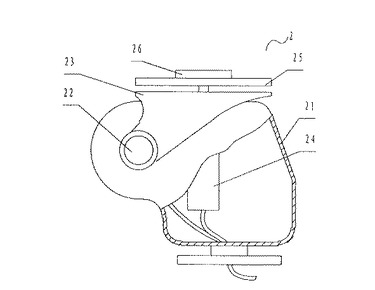
図4に示す実施例において、雲台2は、該検出用車両1に固設される本体台座21と、該本体台座21の中に設けられる縦駆動モータ22と、該本体台座21に設けられ、該縦駆動モータ22に連動して縦回転する縦回転機構23と、該本体台座21の中に設けられる水平駆動モータ24と、該縦回転機構23に設けられ、該水平駆動モータ24に連動して水平回転するとともに、該縦回転機構23に追従して縦回転する(このとき、すでに水平回転ではなく、傾斜回転になっている)水平回転機構25と、該水平回転機構25に設けられ、該赤外線熱画像装置3の本体を取り外し可能に固定するための固定用フレーム26とを含む。
【0042】
上記縦回転機構23の回転速度は3〜5°/Sであり、好ましくは、4°/Sであり、縦回転角度の範囲は10〜90°である。上記水平回転機構25の回転速度は6〜12°/Sであり、好ましくは9°/Sであり、水平回転角度の範囲は0〜355°である。
【0043】
該雲台2は、更に自動走査と自動巡航機能を有してもよい。
該雲台2は、更にネットワーク回路通信機能を有してもよい。通信プロトコルは、Pelco‐P、Pelco‐D、YAAN、業界標準などのマルチプロトコルを含み、ボーレートは、選択可能である。
【0044】
該雲台2の本体台座21内にヒータを設けてもよい。天気が寒いときに、雲台2内各構成の正常な稼働を保証するために、該ヒータは、本体台座21内の環境を加熱し、たとえば8℃〜±5℃のときにオンになり、20℃〜±5℃のときにオフになる。
【0045】
実施例において、データプロセッサ5がノード型コンピュータで実現してもよい。該ノート型コンピュータは、検出用車両1内に設けてもよいし、検出用車両1外部のたとえば作業ステーション内に設けて、無線ネットワーク経由でデータプロセッサ5とマスタコントローラ4との遠隔通信を実現する。
【0046】
該データプロセッサ5は、マスタコントローラ4からの赤外線デジタル信号を受信するデータ入力インタフェース51と、データ入力インタフェース51からの赤外線デジタル信号に対して、路面欠陥分析ソフトウェアを応用してスクリーンショット処理及びデータ分析を行ない、処理後データに基づいて、被検出路面上の欠陥の種類、欠陥の位置情報及び対処提案などを特定するデータ分析モジュール52と、処理後データ及び特定結果を記憶する記憶モジュール53とを含む。記憶モジュール53に記憶される処理後データ及び特定結果は、後続で整理される。
該データプロセッサ5は、被検出路面の赤外線熱画像、赤外線デジタル信号、欠陥の種類、欠陥の発生位置及び対処提案を直観的に表示するための表示モジュール54を更に含む。
【0047】
データプロセッサ5のデータ入力インタフェース51は、RJ45標準ネットワークインタフェース経由でマスタコントローラ4に接続し、データ伝送とネットワーク通信を実現する。
【0048】
実施例において、本発明の路面欠陥検出システムは、該検出用車両1の車輪に設けられ、該データプロセッサ5に接続され、車両速度パルス信号をデータプロセッサ5に出力する距離測定装置6を更に含む。該データプロセッサ5は、上記車両速度パルス信号を距離測定信号に換算してマスタコントローラ4に出力し、よって、該マスタコントローラ4は、上記距離測定信号に基づいて、熱画像装置制御信号を生成して該赤外線熱画像装置3の撮影動作を制御する。
該距離測定装置6は、車両のタイヤ回転数を計測するホールセンサであってもよいし、車両距離測定機能を満足できるその他の種類の距離測定装置であってもよい。
【0049】
上記データプロセッサ5は、ホールセンサから伝送してきたパルス信号に基づいて、検出用車両1の車両速度と里程を換算する。利用者は、実際の状況に基づいて、データプロセッサ5の中の路面欠陥分析ソフトウェアに対して設定をし、毎回の間隔である所定距離(メートル)を与えて、北側路面の赤外線熱画像を撮影するように赤外線熱画像装置3にトリガーする。毎回、車両が該所定距離を走行すると、路面欠陥分析ソフトウェアは、該マスタコントローラ4から送信してきた赤外線デジタル信号から自動的にスクリーンショット処理をし、画像上に路面欠陥が現れたかを分析する。欠陥があった場合、該当路面位置と欠陥の現れをデータプロセッサ5の記憶モジュール(ノート型コンピュータのハードディスク)に記録し、今後の整理に備わる。
【0050】
実施例において、本発明の路面欠陥検出システムは更にデータ伝送装置7を含み、ネットワーク回線経由で該マスタコントローラ4と該データプロセッサ5にそれぞれ接続するルータであってもよく、該ルータ経由で、マスタコントローラ4とデータプロセッサ5との間のデータ伝送とネットワーク通信を実現する。上記データ伝送は、マスタコントローラ4から出力された上記赤外線デジタル信号を受信して該データプロセッサ5に送信すること、データプロセッサ5からの距離測定信号と雲台制御信号を受信して該マスタコントローラ4に伝送することを含み、上記ネットワーク通信は、利用者が直接データプロセッサ5から赤外線熱画像装置制御指令及び/又は雲台制御指令を該マスタコントローラ4に送信することを含む。
【0051】
実施例において、本発明の路面欠陥検出システムにおいて、RJ45標準ネットワークインタフェースを用いたワンワイヤ技術を採用して、マスタコントローラ4とデータプロセッサ5との間のデータ伝送とネットワーク伝送を行なう。
【0052】
システムでは、先進的なコンピュータ圧縮技術とネットワーク伝送技術を用いており、RJ45標準イーサネット(登録商標)通信インタフェース経由で一本のネットワーク回線で、マスタコントローラ4とデータプロセッサ5との間の制御信号のネットワーク通信、赤外線熱画像及び温度データのリアルタイムでの伝送、記録、分析処理、及び故障に関する自動警報を実現できる。そのすべてのデータ(赤外線熱画像、温度データ、制御命令など)がデジタルのフォーマットで伝送され、システムの配線を大きく簡単化し、システムの配線コストを低減し、データ伝送の確実性と故障分析の正確性を向上し、温度分析と計算の柔軟性を強化した。
【0053】
本発明の路面欠陥検出システムの基本的な稼働原理として、検出用車両の走行中に、検出用車両のタイヤに取り付けられる距離測定装置(ホールセンサ)6が取得した距離測定信号に基づいて、一定距離(たとえば2メートル)おきに一つのトリガー信号を送信し、検出用車両上の赤外線熱画像装置3に対して、被検出路面のいずれの区域(該区域の長さは、たとえば2メートルであり、幅が標準車線幅である)の赤外線デジタル信号付きの赤外線熱画像を撮影するようにトリガーし、熱画像及びその中の温度データに対して、データプロセッサ5の中のデータ分析モジュール52及びインストール済みの路面欠陥検出ソフトウェアにより分析処理し、分析と処理結果に基づいて、該区域の路面温度分布記録図を描き、それから上記のフローを繰り返し実施し、被検出路面全体の連続的な路面温度分布記録図とすべての温度データを取得する。定量と定性の方法で被検出路面の欠陥状況を直観的に反映し、路面補修に可視の画像とデータを提供する。
【0054】
以下、図3を参照して、本発明の赤外線撮影技術に基づく路面欠陥検出システムが採用する路面検出方法を具体的に記載する。
上記路面欠陥検出方法は、下記ステップ1〜7を含む。
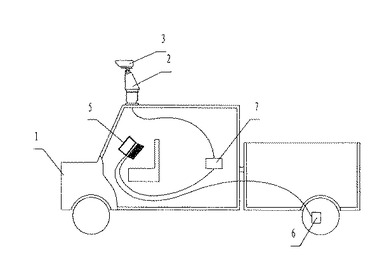
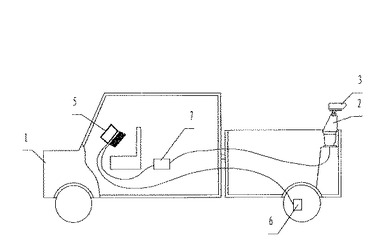
ステップ1において、雲台2を介して赤外線熱画像装置3を検出用車両1に架設し(熱画像装置の撮影視界角と必要とする高さの問題を考慮すると、検出用車両1は、一般的に図5、6に示す車両頭部、後部が地面から遠く離れる作業車が使用され、熱が装装置の取り付けを便利にする)、マスタコントローラ4とホールセンサは、ネットワーク回線又は関連電源線経由で運転席のそばのノート型コンピュータ(即ちデータプロセッサ5)に接続し、システム全体の取り付け位置は、図5、6に示されている。
【0055】
図5、6に示すように、具体的な路面状況と検出要求に応じて、赤外線熱画像装置3は、検出用車両の天井部又は後部に選択可能に架設される。取り付けるとき、補助平面を介して赤外線熱画像装置3を上昇させ、検出路面の幅の需要を満足する。赤外線熱画像装置3の取り付け位置が異なるため、取得した赤外線熱画像に基づいて路面欠陥位置を特定するときに、距離に関する計算方法では、熱画像装置の取り付け位置を含めて考慮するべきである。
検出用車両は、基本的に均一の時速で高速道路など被検出路面上を走行する。
【0056】
ステップ2において、データプロセッサ5からの雲台制御信号に基づいて、マスタコントローラ4が雲台駆動信号を生成して、雲台2の水平回転と縦回転を駆動する。
ステップ3において、ホールセンサのパルス信号に基づいて設定した所定距離(一般的に2メートルである)を通過する。
ステップ4において、赤外線熱画像装置3の撮影トリガー装置に対して、該所定距離おきに一つのトリガー信号を送信し、赤外線熱画像装置3が、上記トリガー信号に基づいて、被検出路面の赤外線熱画像を自動的に撮影する。該赤外線熱画像が赤外線デジタル画像であり、各ポイントに具体的な温度値が含まれる。
【0057】
ステップ5において、該赤外線熱画像装置3が、撮影した各フレームの温度値を含む赤外線熱画像信号をリアルタイムで該マスタコントローラ4にデータ線を介して伝送し、該マスタコントローラ4が、上記赤外線熱画像デジタル信号を標準ネットワーク伝送用の赤外線デジタル信号に変換して該データプロセッサ5に伝送する。
ステップ6において、該データプロセッサ5が、上記赤外線デジタル信号に対して、路面欠陥分析ソフトウェアを応用してスクリーンショット処理及びデータ分析を行ない、被検出路面の連続的な温度分布記録図を与えるとともに、温度傾向分析曲線を取得し、路面撮影時間及び各ポイントの対応温度を正確に反映する。
【0058】
ステップ7において、赤外線熱画像温度データに明らかな差異が現れるとき、該路面欠陥分析ソフトウェアを応用して差異データを分析し、分析により分析報告を作成し、路面欠陥の種類を特定し、異常変化のある温度画像と温度曲線について、路面欠陥分析ソフトウェアは、自動的に警報を行ない(たとえば表示モジュールの表示ディスプレイに自動的に警報提示ボックスが飛び出す)、起点の座標に基づいて、欠陥が現れた画像がすべての画像において何枚目なのかの位置情報を示し、コンピュータ処理システムは、該何枚目かを示す位置情報と、距離センサにより設定した距離トリガーパラメータに基づいて、故障ポイントの具体的な路面位置、即ち起点に対するマイル数を自動的に換算する。
【0059】
上記方法は、更に下記ステップ8〜10を含む。
ステップ8において、ステップ7を実行した後、該検出用車両1が被検出路面の終点に達したか否かを判断する。判断結果により、終点に達していないと示される場合、ステップ4に戻る。
ステップ9において、ステップ8を実行した後、判断結果により終点に達したと示される場合、分析者が、欠陥が現れたすべての画像を一つ一つ分析・判断し、対処結論及び/又は採用されうる対処提案を提示し、故障報告をプリントアウトして保管し、該データプロセッサ5が、欠陥が現れた画像と関連データを路面欠陥分析ソフトウェアのデータベースに導入して記憶し、累積と総括に備わり、今後の補修維持作業に役立つ。
【0060】
ステップ10において、ステップ7を実行した後、赤外線熱画像装置3の撮影角度の変更が必要か否かを判断する。判断結果により必要であると示される場合、ステップ2に戻るが、判断結果により必要でないと示される場合、ステップ4に戻る。
【0061】
従来技術に比較して、本発明の赤外線撮影技術に基づく路面欠陥検出システム及び方法は、下記の利点を有する。
a.従来技術の赤外線ポイント温度測定装置は、温度測定しかできず、撮影できないが、本発明は、温度測定できるとともに、被検出物体の赤外線熱画像を表示することもでき、その検出結果が従来技術に比較してより直観、快速、正確、確実であり、後続の故障判断と故障除去に効果的な根拠を提供し、効果的である。
【0062】
b.従来技術の赤外線ポイント温度測定装置が実際に検出したのは、被検出物体表面のある区域(被検出区域を称される。該被検出区域の面積が温度測定距離に正比例する)の平均温度であるため、その温度測定結果の正確性には、一定の誤差が存在する。一方、本発明は、被検出路面全体の赤外線熱分布記録図を表示できるとともに、該赤外線熱分布記録図上の各ポイントの具体的な温度値を示すことができ、検出結果がより直観的かつ正確であり、故障ポイントの判断と後期処理に直観的で確実な根拠を提供している。これは、従来技術が及ばないことである。
【0063】
c.従来技術の赤外線ポイント温度測定装置が測定した温度値は、ある検出区域(該検出区域の面積が温度測定距離に正比例する)の平均温度であるため、赤外線ポイント温度測定装置が路面まで近ければ近いほど、検出区域の面積が小さくなり、赤外線ポイント温度測定装置が路面まで遠ければ遠いほど、検出区域の面積が大きくなる。しかし、赤外線ポイント温度測定装置が測定した温度が一定の精度要求を満足しなければならないため、正確に温度を測定するには、赤外線ポイント温度測定装置をあまり路面より遠い位置に取り付けてはならない。すると、一台の赤外線ポイント温度測定装置が毎回検出する面積は非常に限られ、たとえ一台の検出用車両に複数台の赤外線温度測定装置を多く取り付けても、一回で一本の車線しか監視できないので、多車線路面の全面的検出を実現するには、時間と手間がかかる。一方、本発明は、レンズの視界角を調節することにより被検出物体の被検出範囲を変更可能であり、たとえば四車線の高速道路の路面全体に対する同時検出を容易に実現できる。これは、従来技術が及ばないことであり、検出効率と正確性が大きく高められている。
【0064】
上記実施例において、本発明は、赤外線撮影技術を舗装済みの高速道路などのアスファルト路面又はその他の路面の欠陥検出に応用しているが、もちろん本発明の実施例はこれに限られるものではなく、該技術を建設中の路面工事現場に応用することもでき、高速道路などアスファルト路面の舗装作業のために、アスファルト舗装均一度に関する赤外線熱画像参考画面と関連データを提供し、工事の品質を保証する。
【0065】
以上、図面を参照して本発明の複数の実施例について具体的に記載したが、本公開内容の原理の精神と範囲内に、当業者がその他の数多くの変化と実施例を当たり前のように導き出せることが理解されよう。特に、該公開、図面及び特許請求の範囲内に、部品及び/又は部品の設置の組合せについて多種類の変化と改良を行うことができる。部品及び/又は付属部品の変化と改良以外、その他の選択可能な応用についても、当業者にとって明らかなものである。
【符号の説明】
【0066】
1 検出用車両
2 雲台
21 本体台座
22 縦駆動モータ
23 縦回転機構
24 水平駆動モータ
25 水平回転機構
26 固定用フレーム
3 赤外線熱画像装置
4 マスタコントローラ
41 USB信号変換ボード
42 USBインタフェース
43 データ分析制御モジュール
5 データプロセッサ
51 データ入力インタフェース
52 データ分析モジュール
53 記憶モジュール
54 表示モジュール
6 距離測定装置
7 データ伝送装置
【技術分野】
【0001】
本発明は、路面欠陥と路面状態検出技術に係り、特にアスファルトの高速道路などの路面工事品質を監視するシステム及び方法に関する。
【背景技術】
【0002】
現在、国内外で高速道路などアスファルト路面又はその他の路面の路面欠陥を監視する場合、よく「人工による目視検出法」又は「赤外線熱差に基づく路面透水性評価及び関連補修技術」などを採用して、路面欠陥について迅速な検出と評価を行なう。
【0003】
「赤外線熱差に基づく路面透水性評価及び関連補修技術」に用いられる核となる装置は、赤外線温度測定装置(或いは赤外線ポイント温度測定装置)である。該技術に基づく路面欠陥検出システムにおいて、複数の赤外線温度測定装置を検出用車両後部に並べさせて固定させ、自動車走行中に距離センサを通して赤外線ポイント温度測定装置の稼動をトリガーし、高速道路など路面監視範囲内の温度値を採集し、複数のポイントにおける温度値で温度曲線を形成し、そして温度差異曲線で路面熱差(温度差)記録図を模擬して形成して路面の検出データとし、更に路面の損傷状況を判断する。
【0004】
赤外線温度測定装置は、その内部に取り付けられる光電探知器を利用して物体の表面温度を検知する装置であり、光電探知器から赤外線ビームが射出され、該射出ビームが物体表面に当たってから反射して戻り、再び光電探知器に集光する。上記射出ビームに比較して、返されたビームに付く赤外線熱エネルギーは、上記物体の材質や表面状態の相違により、異なる程度のエネルギーの損失が生じる。該光電探知器は、返された赤外線ビームのエネルギーを受信して対応する電気信号に変換し、該電気信号が再び検知対象の温度値に換算される。
【0005】
赤外線温度測定装置が物体表面のいずれのポイントの温度を逐一に測定するものとして用いられるため、射出ビームを物体表面のワンポイントに集光させることが理想的であり、このように測定された温度が該ポイントのもっとも正確な温度である。しかし、ビームが乱射するため、光電探知器から射出されたビームが一定の距離を経て最終的に物体表面に接触するときに、すでに一つのポイントに照射されるのではなく、一つの区域に照射されることになり、該区域の面積の大きさは、明らかに光電探知器と検知対象との距離(すなわち温度測定距離)に正比例する。従って、赤外線温度測定装置が実際に測定した温度は、ある区域の平均温度である。
【0006】
また、赤外線温度測定装置は、一回又は複数回の測定により被検出物体の一部のポイント(或いは区域)の温度を測定可能であるものの、被検出物体の直観的な画像又は被検出物体の構造的な特徴を現せる赤外線熱画像を提供することができないので、従来技術におけるこのような赤外線温度測定装置に基づく路面欠陥検出方式は、真の現場画像を参考としていないため、検出結果が直観的ではなく、路面欠陥の判断、位置決め及び分析が行なわれにくく、検出の漏洩や誤検出になりやすく、実際の検出と評価の需要を満足できない。
【0007】
たとえば、特許番号で中国特許200420041784号の特許文献「赤外線路面温度測定装置」において、路面欠陥検出システムが開示されており、該システムは、赤外線温度測定装置を利用してアスファルト路面の温度を採集し、温度差異に基づいて熱差記録図を形成し、定量、定性、位置決めの三つの方面から路面の透水区域を評価する。その主な稼動原理として、路面の密実度、透水率に不一致性が存在するため、雨の後に構造層内の水含有量が異なり、太陽光の照射で水分が蒸発して熱が持っていかれ、路面上の温度が異なるように表し、熱差記録図に対する分析から密実度の差異を判定できる。
【0008】
該システムの核となる検出設備として赤外線温度測定装置が用いられるため、その稼動原理から、温度測定しかできず、撮影できないことが決められたので、被検出物体の熱分布画像を直観的に反映することができない。また、赤外線温度測定装置が検出した赤外線デジタル信号が温度測定距離と正比例する区域(被検出区域)面積内の平均温度であるため、その温度測定結果の正確性には、一定の誤差が存在する。更に、赤外線温度測定装置が測定した温度値がポイントデータ(多くても小さい区域の赤外線デジタル信号であり、路面検出の精度要求に基づき、該区域があまり大きくならないほうがよい)のタイプであるため、一台の赤外線温度測定装置の検出面積が非常に限られており、たとえ一台の検出用車両に複数台の温度測定装置を多く取り付けても、一回で多くても一本の車線しか監視できないので、多車線路面の全面的検出を実現するには、時間と手間がかかるに違いない。たとえば、上記特許出願の明細書には、図1について「記録図区域は、温度差に基づいて形成した熱差記録図であり、赤色区域は高温区域を示し、青色区域は低温区域を示し、毎回一本の車線を検出する」と説明しているため、単一車線に対する検出しか実現できないことがわかる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】中国特許200420041784号
【発明の概要】
【発明が解決しようとする課題】
【0010】
上記問題を解決するために、本発明の目的は、赤外線撮影技術に基づく路面欠陥検出システムを提供し、赤外線熱画像技術を利用して高速道路などアスファルト路面又はその他の路面の欠陥を迅速かつ直観的に検出し、関連道路の透水、ひび割れ、ポットホール、ルース化、層間脱落など欠陥の補修に対して、正確な技術的な根拠を提供する。
【課題を解決するための手段】
【0011】
上記目的を達成するために、本発明は、赤外線撮影技術に基づく路面欠陥検出システムを提供する。該システムは、被検出路面上を走行する検出用車両と、該検出用車両に設けられ、該検出用車両に対して水平回転及び縦回転する雲台と、該雲台に取り外し可能に設けられ、上記被検出路面の赤外線熱画像を撮影し、温度値を含む該被検出路面の赤外線熱画像に関する赤外線熱画像デジタル信号を出力するための赤外線熱画像装置と、該検出用車両に設けられ、該雲台と該赤外線熱画像装置にそれぞれ接続され、該赤外線熱画像装置の撮影動作及び該雲台の水平回転角度と縦回転角度を制御し、該赤外線熱画像装置から出力された赤外線熱画像デジタル信号を標準ネットワーク伝送用の赤外線デジタル信号に変換するためのマスタコントローラと、上記赤外線熱画像装置に対する制御信号を生成して出力し、上記赤外線デジタル信号を受信して分析・処理を行なうことにより、上記被検出路面の欠陥の種類と欠陥の位置情報を特定するためのデータプロセッサとを含む。
【0012】
本発明の実施例に拠れば、該マスタコントローラは、該赤外線熱画像装置によって撮影した温度値を含む赤外線熱画像デジタル信号をUSB信号に変換するUSB信号変換ボードと、上記USB信号を伝送するためのUSBインタフェースと、該USBインタフェースからのUSB信号を標準ネットワーク伝送用の上記赤外線デジタル信号に変換して、リアルタイムでネットワーク回線を介して該データプロセッサに送信し、該データプロセッサからの距離測定信号に基づいて熱画像装置制御信号を生成して該赤外線熱画像装置に送信してその撮影動作を制御し、該データプロセッサからの雲台制御信号に基づいて雲台駆動信号を生成して該雲台に送信してその水平回転と縦回転を制御するデータ分析制御モジュールとを含む。
【0013】
本発明の実施例に拠れば、該雲台は、該検出用車両に固設される本体台座と、該本体台座の中に設けられる縦駆動モータと、該本体台座に設けられ、該縦駆動モータに連動して縦回転する縦回転機構と、該本体台座の中に設けられる水平駆動モータと、該縦回転機構に設けられ、該水平駆動モータに連動して水平回転するとともに、該縦回転機構に追従して縦回転する水平回転機構と、該水平回転機構に設けられ、該赤外線熱画像装置の本体を取り外し可能に固定するための固定用フレームとを含む。
【0014】
本発明の実施例に拠れば、該縦回転機構の回転速度は3〜5°/Sであり、縦回転角度の範囲は10〜90°である。
本発明の実施例に拠れば、該水平回転機構の回転速度は6〜12°/Sであり、水平回転角度の範囲は0〜355°である。
【0015】
本発明の実施例に拠れば、該データプロセッサは、該マスタコントローラからの赤外線デジタル信号を受信するデータ入力インタフェースと、データ入力インタフェースからの赤外線デジタル信号に対して、路面欠陥分析ソフトウェアを応用してスクリーンショット処理及びデータ分析を行ない、処理後データに基づいて、被検出路面上の欠陥の種類、欠陥の位置情報を特定するデータ分析モジュールと、上記処理後データ及び特定結果を記憶する記憶モジュールとを含む。
本発明の実施例に拠れば、該データプロセッサは、被検出路面の赤外線熱画像、赤外線デジタル信号、欠陥の種類、欠陥の発生位置及び対処提案を直観的に表示するための表示モジュールを更に含む。
【0016】
本発明の実施例に拠れば、該データプロセッサのデータ入力インタフェースは、RJ45標準ネットワークインタフェース経由で該マスタコントローラとの間にデータ伝送とネットワーク通信を実現する。
本発明の実施例に拠れば、該マスタコントローラと該データプロセッサは、具体的にノート型コンピュータである。
【0017】
本発明の実施例に拠れば、該システムは、該検出用車両の車輪に設けられ、該データプロセッサに接続される距離測定装置を更に含む。該データプロセッサは、該距離測定装置からの車両速度パルス信号を受信して距離測定信号に換算し、上記距離測定信号を該マスタコントローラに出力し、よって、該マスタコントローラは、上記距離測定信号に基づいて、熱画像装置制御信号を生成して該赤外線熱画像装置の撮影動作を制御する。
【0018】
本発明の実施例に拠れば、該距離測定装置は、たとえばホールセンサである。
本発明の実施例に拠れば、該システムは、該マスタコントローラと該データプロセッサにそれぞれ接続し、両者間のネットワーク通信を実現するデータ伝送装置を更に含む。
本発明の実施例に拠れば、該データ伝送装置は、ネットワーク回線経由で該マスタコントローラと該データプロセッサに接続するルータである。
【0019】
上記目的を達成するために、本発明は、赤外線撮影技術に基づく路面欠陥検出方法を更に提供する。該方法は、上記の赤外線撮影技術に基づく路面欠陥検出システムを応用して被検出路面の欠陥を検出する。該方法は、検出用車両が基本的に均一の時速で該被検出路面上を走行するステップ1と、データプロセッサからの雲台制御信号に基づいて、マスタコントローラが雲台駆動信号を生成して、雲台の水平回転と縦回転を駆動するステップ2と、距離測定装置からの車両速度パルス信号に基づいて、所定距離を設定するステップ3と、赤外線熱画像装置の撮影トリガー装置に対して、該所定距離おきに一つのトリガー信号を送信し、該赤外線熱画像装置が、上記トリガー信号に基づいて、該被検出路面の赤外線熱画像を自動的に撮影する。該赤外線熱画像が赤外線デジタル画像であり、各ポイントに具体的な温度値が含まれるステップ4と、該赤外線熱画像装置が、撮影した各フレームの温度値を含む赤外線熱画像デジタル信号をリアルタイムで該マスタコントローラにデータ線を介して伝送し、該マスタコントローラが、上記赤外線熱画像デジタル信号を標準ネットワーク伝送用の赤外線デジタル信号に変換して該データプロセッサに伝送するステップ5と、該データプロセッサが、上記赤外線デジタル信号に対して、路面欠陥分析ソフトウェアを応用してスクリーンショット処理及びデータ分析を行ない、被検出路面の連続的な温度分布記録図を与えるとともに、温度傾向分析曲線を取得し、路面撮影時間及び各ポイントの対応温度を正確に反映するステップ6と、該温度分布記録図における温度データに明らかな差異が現れるとき、該路面欠陥分析ソフトウェアを応用して路面欠陥の種類と欠陥の位置情報を特定するステップ7とを含む。
【0020】
本発明の実施例に拠れば、上記所定距離は、2メートルである。
本発明の実施例に拠れば、該方法は、ステップ7を実行した後、該検出用車両が被検出路面の終点に達したか否かを判断し、判断結果により、終点に達していないと示される場合、ステップ4に戻るステップ8を更に含む。
【0021】
本発明の実施例に拠れば、該方法は、ステップ8を実行した後、判断結果により終点に達したと示される場合、分析者が、欠陥が現れたすべての画像を一つ一つ分析・判断し、対処結論及び/又は採用されうる対処提案を提示し、故障報告をプリントアウトして保管し、該データプロセッサが、欠陥が現れた画像と関連データを路面欠陥分析ソフトウェアのデータベースに導入して記憶するステップ9を更に含む。
【0022】
本発明の実施例に拠れば、ステップ7において、異常変化のある温度分布記録図と温度曲線について、該データプロセッサが同時に自動警報を行なう。
本発明の実施例に拠れば、ステップ7において、該データプロセッサが、検出起点の座標、該所定距離の大きさ、及び欠陥あり画像がすべての画像において何枚目なのかの位置情報に基づいて、上記欠陥の位置情報を自動的に換算する。
本発明の実施例に拠れば、該方法は、ステップ7を実行した後、赤外線熱画像装置の撮影角度の変更が必要か否かを判断し、判断結果により必要であると示される場合、ステップ2に戻るが、判断結果により必要でないと示される場合、ステップ4に戻るステップ10を更に含む。
【発明の効果】
【0023】
上記の本発明の技術案によれば、下記の有益な効果を奏する。
第一、赤外線熱画像など情報採集技術と画像赤外線デジタル信号処理などの技術を駆使して、非接触の画像撮影を利用して、アスファルトの高速道路などの路面の迅速な検出を実現する。該システムの操作性が優れ、赤外撮影は、雲、雨、霧など天気の影響を受けず、赤外画像は鮮明であり、1つのフレームの画像採集時間が7msしかかからない。熱画像検出であるため、撮影した欠陥のディテールは、鮮明に見ることができ、欠陥の判断がより直接となる。
【0024】
第二、最先進的なセンシング技術を利用してトリガーして、均一距離又は均一間隔で温度監視装置に信号を伝送し、画像撮影の連続性を確保する。
第三、赤外線デジタル信号を分析処理して管理し、分析報告を生成して、路面の生じうる欠陥を迅速に発見し、従来の高速アスファルト道路の補修技術を改善した。
【図面の簡単な説明】
【0025】
【図1】本発明の路面欠陥検出システムのブロック図である。
【図2】図1に示す路面欠陥検出システムの各構成の接続関係図である。
【図3】本発明実施例による路面欠陥検出システムの稼働フローを示す。
【図4】本発明の一つの実施例における雲台の構造図である。
【図5】本発明の一つの実施例による路面欠陥検出システムの取り付け位置を示す図面である。
【図6】本発明の別の実施例による路面欠陥検出システムの取り付け位置を示す図面である。
【発明を実施するための形態】
【0026】
本発明の実施例の目的、技術案及び利点をより明確にするために、以下、実施例と図面を参照して、本発明の実施例を更に詳しく説明する。ここで、本発明の実施例及びその説明は、本発明を解釈するためのものであり、本発明を限定するものではない。
【0027】
高速道路の快速な発展と舗装里程の増加につれて、構造の選択がますます重要視され、工事の工程と工事の品質に対するコントロールもますます厳しくなっている。しかし、一部の道路では、開通1、2年後に、路面に透水、ひび割れ、ポットホール、わだち掘れ、網状ひび割れ、砂利などの噴出し、橋面破損などの損壊が生じることがある。これは、高速道路の安全、快速、快適な運転という使用機能を大きく低下させるだけではなく、道路の維持コストも増加させた。
【0028】
一般的に、アスファルト路面の損壊は、二種類ある。一つは、路面構造全体或いはその中の一つ又は複数の構成部分の損壊を含む構造性損壊である。該種類の損傷により、路面が所定の車両負荷に耐えなくなる。もう一種類の損壊は、機能性損壊であり、その発生に必ずしも構造性損壊が伴わないが、平坦性、滑り抵抗性などの要素の低下により、道路の所定の使用機能がなくなり、車両走行品質に影響を与える。
【0029】
機能性破損は、一般的に表面的なものであり、識別しやすく、その破損の原因も比較的に明白である。主に局部の微細状ひび割れ、波形状の隆起、ブリーディング、剥がれ、凹凸、摩損が挙げられる。これらの破損により、主に道路のサービス水準を低下させるが、一般的に路面の構造性能と直接的な関係を持たない。機能性損壊について、補修、維持又はコーティングにより、表面層の機能を回復させることができる。
【0030】
構造性破損は、主に路面各層内部の構造性欠陥及び負荷の応力増加によるものであり、路面上では、各種類の形状のひび割れ、変形及び変移などの損壊として反映される。主に亀裂、網状ひび割れ、縦方向・横方向のひび割れ、陥没、ポットホール、砂利などの噴出し、補修の損壊、ルーズ化及びわだち掘れなどが挙げられる。これらの破損により、道路のサービス水準を低下させるだけではなく、路面構造のベアリング力を明らかに低下させ、破損を悪化させ、最終的に路面の損壊をもたらす。構造性損壊に対して、通常道路を徹底的に修復することが必要となる。
【0031】
また、路面損壊の種類は、基礎層の種類、表面層の構造、負荷の種類、気候、工事過程、舗装効果などから影響を受ける。たとえば、断層的粗滑り抵抗構造のアスファルト表面層において、往々にして舗築層が厚いため透水、水溜りなど初期的な水害破壊が生じるが、温度差が大きい又は気温が低い気候条件の地域において、アスファルト路面に、温度応力により横又は縦方向のひび割れが生じ、これらのひび割れは、通常車両の作用を受けて折れたり、破裂したりする。
【0032】
上記の路面損壊種類を明確にすると、路面上の欠陥に対して対応した検出と対処を行なうことができるようになる。現在よく用いられる検出手段には、検出効率が低い、適用面が狭い、典型性が低い、コストが高い、及び路面を破壊するなどの多くの不備が存在するため、快速、簡単、効果的な道路無損傷検出技術を引き続き開発することが要求されている。
【0033】
赤外線熱画像装置は、工業又は民用の検出分野に広く応用されており、赤外線検出技術に基づいて物体の赤外線熱画像を撮影し、物体の位置及び稼働状態などを検出し、検出結果から被写体の赤外線デジタル信号を取得する。
【0034】
赤外線熱画像装置は、その稼働原理により、撮影もできるし、温度測定もできることが決められており、即ち、赤外線ポイント温度測定装置の温度測定機能を満足できるほか、被検出物体の赤外線熱分布画像を示すことができ、しかも、該赤外線熱分布画像には、検出物体の各ポイントの正確な赤外線デジタル信号が含まれる。従って、検出結果は正確かつ直観的であり、故障になりうるポイントに対して迅速な判断を行ないやすい。赤外線熱画像装置の光学メカニズムがカメラに近いため、レンズの視界角を調節することにより被検出物体の面積範囲を変更でき、赤外線熱画像装置を検出用車両の天井部に架設すれば、高速道路の四車線の路面を充分に同時検出できる。従って、赤外線熱画像装置を用いて路面欠陥を検出することは、大いに見込まれている。
【0035】
本発明の赤外線撮影技術に基づく路面検出システム及び方法は、上記の要求を満足できる新型道路無損傷検出技術と手段である。形成された赤外線熱画像を分析することにより、道路の欠陥を診断し、欠陥・破損原因に関する調査と研究を展開することができるようになり、切実で実行可能な予防性維持案を提出し、そして道路舗装品質を高め、道路の使用寿命を延長させ、真に「予防をメインに、予防と対処との両立」を実現する。
【0036】
赤外線熱撮影検出技術は、主に雨の後のアスファルト高速道路など表面温度を採集して、温度差異に基づいて赤外線熱画像を形成し、定量と定性の両面から路面の透水性と損害状況を評価する。たとえば亀裂、網状ひび割れ、陥没などの構造性破損について、ひびができて浸水するため、ほかの正常な路面との間に一定の温度差異が存在し、赤外線熱画像上に網状又はストライプ形状の低温線を表し、温度差異状況に基づいて、路面の損壊状況を大体判断でき、そして適切な補修方式を採用する。一方、波形状の隆起、ブリーディング、凹凸、摩損といった機能性破損について、ソフトシステムによる差異データの分析で分析報告を形成して保管し、保管されている赤外線熱画像を累積比較して、分析ソフトを用いて路面の欠陥の種類の最終的に分析して得られる。
【0037】
図1は、本発明の赤外線撮影技術に基づく路面欠陥検出システムのブロック図である。該システムは、相対的に均一の時速で被検出路面上を走行する検出用車両1と、該検出用車両1に設けられ、該検出用車両1に対して水平回転及び縦回転する雲台2と、該雲台2に取り外し可能に設けられ、上記被検出路面の赤外線熱画像を撮影し、温度値を含む該被検出路面の赤外線熱画像に関する赤外線熱画像デジタル信号(14ビットデジタル信号)を出力するための赤外線熱画像装置3と、該検出用車両1に設けられ、該雲台2と該赤外線熱画像装置3にそれぞれ接続され、撮影開始時間、終了時間、撮影トリガータイミング、レンズの焦点調整及び撮影範囲などを含む該赤外線熱画像装置3の撮影動作及び該雲台2の水平回転角度と縦回転角度を制御し、該赤外線熱画像装置3から出力された赤外線熱画像デジタル信号を標準ネットワーク伝送用の赤外線デジタル信号に変換するためのマスタコントローラ4と、上記赤外線熱画像装置3に対する制御信号を生成して出力し、上記赤外線デジタル信号を受信して分析・処理を行なうことにより、上記被検出路面の欠陥の種類と欠陥の位置情報を特定するためのデータプロセッサ5とを含む。
【0038】
図2に示す実施例において、該マスタコントローラ4は、赤外線熱画像装置3からの赤外線熱画像デジタル信号をUSB信号に変換するUSB信号変換ボード41と、上記USB信号を伝送するためのUSBインタフェース42と、該USBインタフェース42からのUSB信号を、RJ45標準ネットワークインタフェース経由で伝送可能な赤外線デジタル信号にIrseverソフトウェアを応用して変換して、リアルタイムでネットワーク回線を介してデータプロセッサ5に送信し、データプロセッサ5からの距離測定信号に基づいて熱画像装置制御信号を生成して該赤外線熱画像装置3に送信してその撮影動作を制御し、データプロセッサ5からの雲台制御信号に基づいて雲台駆動信号を生成して485シリアルインタフェース経由で雲台2に送信してその水平回転と縦回転を制御するデータ分析制御モジュール43とを含む。
【0039】
該マスタコントローラ4は、たとえばAMD LX700チップで実現可能であるし、該マスタコントローラ4の上記機能を満足できるその他の種類のチップで実現してもよい。該マスタコントローラ4は、該赤外線熱画像装置3とともに全体的に一つの防護カバーに設けられる。
【0040】
データ分析制御モジュール43は、Irseverソフトウェアを起動し、赤外線熱画像装置3から受信した14ビットの赤外線デジタル信号(USB信号)を、RJ45標準ネットワーク信号に変換し、データプロセッサ5に送信して処理される。データプロセッサ5が送信した制御信号(たとえばチップの焦点調整、キャッチ、雲台回転など熱画像装置制御信号と雲台駆動信号)は、RJ45標準ネットワーク経由で該マスタコントローラ4に送信し、該マスタコントローラ4は、上記制御信号と駆動信号を受信してからUSB信号を送信し、赤外線熱画像装置の熱画像チップに対して一連の焦点調整などの動作を行なうように駆動し、更に485シリアルインタフェース経由で、一定角度範囲内の水平と縦回転を行なうように雲台2を制御する。
【0041】
図4に示す実施例において、雲台2は、該検出用車両1に固設される本体台座21と、該本体台座21の中に設けられる縦駆動モータ22と、該本体台座21に設けられ、該縦駆動モータ22に連動して縦回転する縦回転機構23と、該本体台座21の中に設けられる水平駆動モータ24と、該縦回転機構23に設けられ、該水平駆動モータ24に連動して水平回転するとともに、該縦回転機構23に追従して縦回転する(このとき、すでに水平回転ではなく、傾斜回転になっている)水平回転機構25と、該水平回転機構25に設けられ、該赤外線熱画像装置3の本体を取り外し可能に固定するための固定用フレーム26とを含む。
【0042】
上記縦回転機構23の回転速度は3〜5°/Sであり、好ましくは、4°/Sであり、縦回転角度の範囲は10〜90°である。上記水平回転機構25の回転速度は6〜12°/Sであり、好ましくは9°/Sであり、水平回転角度の範囲は0〜355°である。
【0043】
該雲台2は、更に自動走査と自動巡航機能を有してもよい。
該雲台2は、更にネットワーク回路通信機能を有してもよい。通信プロトコルは、Pelco‐P、Pelco‐D、YAAN、業界標準などのマルチプロトコルを含み、ボーレートは、選択可能である。
【0044】
該雲台2の本体台座21内にヒータを設けてもよい。天気が寒いときに、雲台2内各構成の正常な稼働を保証するために、該ヒータは、本体台座21内の環境を加熱し、たとえば8℃〜±5℃のときにオンになり、20℃〜±5℃のときにオフになる。
【0045】
実施例において、データプロセッサ5がノード型コンピュータで実現してもよい。該ノート型コンピュータは、検出用車両1内に設けてもよいし、検出用車両1外部のたとえば作業ステーション内に設けて、無線ネットワーク経由でデータプロセッサ5とマスタコントローラ4との遠隔通信を実現する。
【0046】
該データプロセッサ5は、マスタコントローラ4からの赤外線デジタル信号を受信するデータ入力インタフェース51と、データ入力インタフェース51からの赤外線デジタル信号に対して、路面欠陥分析ソフトウェアを応用してスクリーンショット処理及びデータ分析を行ない、処理後データに基づいて、被検出路面上の欠陥の種類、欠陥の位置情報及び対処提案などを特定するデータ分析モジュール52と、処理後データ及び特定結果を記憶する記憶モジュール53とを含む。記憶モジュール53に記憶される処理後データ及び特定結果は、後続で整理される。
該データプロセッサ5は、被検出路面の赤外線熱画像、赤外線デジタル信号、欠陥の種類、欠陥の発生位置及び対処提案を直観的に表示するための表示モジュール54を更に含む。
【0047】
データプロセッサ5のデータ入力インタフェース51は、RJ45標準ネットワークインタフェース経由でマスタコントローラ4に接続し、データ伝送とネットワーク通信を実現する。
【0048】
実施例において、本発明の路面欠陥検出システムは、該検出用車両1の車輪に設けられ、該データプロセッサ5に接続され、車両速度パルス信号をデータプロセッサ5に出力する距離測定装置6を更に含む。該データプロセッサ5は、上記車両速度パルス信号を距離測定信号に換算してマスタコントローラ4に出力し、よって、該マスタコントローラ4は、上記距離測定信号に基づいて、熱画像装置制御信号を生成して該赤外線熱画像装置3の撮影動作を制御する。
該距離測定装置6は、車両のタイヤ回転数を計測するホールセンサであってもよいし、車両距離測定機能を満足できるその他の種類の距離測定装置であってもよい。
【0049】
上記データプロセッサ5は、ホールセンサから伝送してきたパルス信号に基づいて、検出用車両1の車両速度と里程を換算する。利用者は、実際の状況に基づいて、データプロセッサ5の中の路面欠陥分析ソフトウェアに対して設定をし、毎回の間隔である所定距離(メートル)を与えて、北側路面の赤外線熱画像を撮影するように赤外線熱画像装置3にトリガーする。毎回、車両が該所定距離を走行すると、路面欠陥分析ソフトウェアは、該マスタコントローラ4から送信してきた赤外線デジタル信号から自動的にスクリーンショット処理をし、画像上に路面欠陥が現れたかを分析する。欠陥があった場合、該当路面位置と欠陥の現れをデータプロセッサ5の記憶モジュール(ノート型コンピュータのハードディスク)に記録し、今後の整理に備わる。
【0050】
実施例において、本発明の路面欠陥検出システムは更にデータ伝送装置7を含み、ネットワーク回線経由で該マスタコントローラ4と該データプロセッサ5にそれぞれ接続するルータであってもよく、該ルータ経由で、マスタコントローラ4とデータプロセッサ5との間のデータ伝送とネットワーク通信を実現する。上記データ伝送は、マスタコントローラ4から出力された上記赤外線デジタル信号を受信して該データプロセッサ5に送信すること、データプロセッサ5からの距離測定信号と雲台制御信号を受信して該マスタコントローラ4に伝送することを含み、上記ネットワーク通信は、利用者が直接データプロセッサ5から赤外線熱画像装置制御指令及び/又は雲台制御指令を該マスタコントローラ4に送信することを含む。
【0051】
実施例において、本発明の路面欠陥検出システムにおいて、RJ45標準ネットワークインタフェースを用いたワンワイヤ技術を採用して、マスタコントローラ4とデータプロセッサ5との間のデータ伝送とネットワーク伝送を行なう。
【0052】
システムでは、先進的なコンピュータ圧縮技術とネットワーク伝送技術を用いており、RJ45標準イーサネット(登録商標)通信インタフェース経由で一本のネットワーク回線で、マスタコントローラ4とデータプロセッサ5との間の制御信号のネットワーク通信、赤外線熱画像及び温度データのリアルタイムでの伝送、記録、分析処理、及び故障に関する自動警報を実現できる。そのすべてのデータ(赤外線熱画像、温度データ、制御命令など)がデジタルのフォーマットで伝送され、システムの配線を大きく簡単化し、システムの配線コストを低減し、データ伝送の確実性と故障分析の正確性を向上し、温度分析と計算の柔軟性を強化した。
【0053】
本発明の路面欠陥検出システムの基本的な稼働原理として、検出用車両の走行中に、検出用車両のタイヤに取り付けられる距離測定装置(ホールセンサ)6が取得した距離測定信号に基づいて、一定距離(たとえば2メートル)おきに一つのトリガー信号を送信し、検出用車両上の赤外線熱画像装置3に対して、被検出路面のいずれの区域(該区域の長さは、たとえば2メートルであり、幅が標準車線幅である)の赤外線デジタル信号付きの赤外線熱画像を撮影するようにトリガーし、熱画像及びその中の温度データに対して、データプロセッサ5の中のデータ分析モジュール52及びインストール済みの路面欠陥検出ソフトウェアにより分析処理し、分析と処理結果に基づいて、該区域の路面温度分布記録図を描き、それから上記のフローを繰り返し実施し、被検出路面全体の連続的な路面温度分布記録図とすべての温度データを取得する。定量と定性の方法で被検出路面の欠陥状況を直観的に反映し、路面補修に可視の画像とデータを提供する。
【0054】
以下、図3を参照して、本発明の赤外線撮影技術に基づく路面欠陥検出システムが採用する路面検出方法を具体的に記載する。
上記路面欠陥検出方法は、下記ステップ1〜7を含む。
ステップ1において、雲台2を介して赤外線熱画像装置3を検出用車両1に架設し(熱画像装置の撮影視界角と必要とする高さの問題を考慮すると、検出用車両1は、一般的に図5、6に示す車両頭部、後部が地面から遠く離れる作業車が使用され、熱が装装置の取り付けを便利にする)、マスタコントローラ4とホールセンサは、ネットワーク回線又は関連電源線経由で運転席のそばのノート型コンピュータ(即ちデータプロセッサ5)に接続し、システム全体の取り付け位置は、図5、6に示されている。
【0055】
図5、6に示すように、具体的な路面状況と検出要求に応じて、赤外線熱画像装置3は、検出用車両の天井部又は後部に選択可能に架設される。取り付けるとき、補助平面を介して赤外線熱画像装置3を上昇させ、検出路面の幅の需要を満足する。赤外線熱画像装置3の取り付け位置が異なるため、取得した赤外線熱画像に基づいて路面欠陥位置を特定するときに、距離に関する計算方法では、熱画像装置の取り付け位置を含めて考慮するべきである。
検出用車両は、基本的に均一の時速で高速道路など被検出路面上を走行する。
【0056】
ステップ2において、データプロセッサ5からの雲台制御信号に基づいて、マスタコントローラ4が雲台駆動信号を生成して、雲台2の水平回転と縦回転を駆動する。
ステップ3において、ホールセンサのパルス信号に基づいて設定した所定距離(一般的に2メートルである)を通過する。
ステップ4において、赤外線熱画像装置3の撮影トリガー装置に対して、該所定距離おきに一つのトリガー信号を送信し、赤外線熱画像装置3が、上記トリガー信号に基づいて、被検出路面の赤外線熱画像を自動的に撮影する。該赤外線熱画像が赤外線デジタル画像であり、各ポイントに具体的な温度値が含まれる。
【0057】
ステップ5において、該赤外線熱画像装置3が、撮影した各フレームの温度値を含む赤外線熱画像信号をリアルタイムで該マスタコントローラ4にデータ線を介して伝送し、該マスタコントローラ4が、上記赤外線熱画像デジタル信号を標準ネットワーク伝送用の赤外線デジタル信号に変換して該データプロセッサ5に伝送する。
ステップ6において、該データプロセッサ5が、上記赤外線デジタル信号に対して、路面欠陥分析ソフトウェアを応用してスクリーンショット処理及びデータ分析を行ない、被検出路面の連続的な温度分布記録図を与えるとともに、温度傾向分析曲線を取得し、路面撮影時間及び各ポイントの対応温度を正確に反映する。
【0058】
ステップ7において、赤外線熱画像温度データに明らかな差異が現れるとき、該路面欠陥分析ソフトウェアを応用して差異データを分析し、分析により分析報告を作成し、路面欠陥の種類を特定し、異常変化のある温度画像と温度曲線について、路面欠陥分析ソフトウェアは、自動的に警報を行ない(たとえば表示モジュールの表示ディスプレイに自動的に警報提示ボックスが飛び出す)、起点の座標に基づいて、欠陥が現れた画像がすべての画像において何枚目なのかの位置情報を示し、コンピュータ処理システムは、該何枚目かを示す位置情報と、距離センサにより設定した距離トリガーパラメータに基づいて、故障ポイントの具体的な路面位置、即ち起点に対するマイル数を自動的に換算する。
【0059】
上記方法は、更に下記ステップ8〜10を含む。
ステップ8において、ステップ7を実行した後、該検出用車両1が被検出路面の終点に達したか否かを判断する。判断結果により、終点に達していないと示される場合、ステップ4に戻る。
ステップ9において、ステップ8を実行した後、判断結果により終点に達したと示される場合、分析者が、欠陥が現れたすべての画像を一つ一つ分析・判断し、対処結論及び/又は採用されうる対処提案を提示し、故障報告をプリントアウトして保管し、該データプロセッサ5が、欠陥が現れた画像と関連データを路面欠陥分析ソフトウェアのデータベースに導入して記憶し、累積と総括に備わり、今後の補修維持作業に役立つ。
【0060】
ステップ10において、ステップ7を実行した後、赤外線熱画像装置3の撮影角度の変更が必要か否かを判断する。判断結果により必要であると示される場合、ステップ2に戻るが、判断結果により必要でないと示される場合、ステップ4に戻る。
【0061】
従来技術に比較して、本発明の赤外線撮影技術に基づく路面欠陥検出システム及び方法は、下記の利点を有する。
a.従来技術の赤外線ポイント温度測定装置は、温度測定しかできず、撮影できないが、本発明は、温度測定できるとともに、被検出物体の赤外線熱画像を表示することもでき、その検出結果が従来技術に比較してより直観、快速、正確、確実であり、後続の故障判断と故障除去に効果的な根拠を提供し、効果的である。
【0062】
b.従来技術の赤外線ポイント温度測定装置が実際に検出したのは、被検出物体表面のある区域(被検出区域を称される。該被検出区域の面積が温度測定距離に正比例する)の平均温度であるため、その温度測定結果の正確性には、一定の誤差が存在する。一方、本発明は、被検出路面全体の赤外線熱分布記録図を表示できるとともに、該赤外線熱分布記録図上の各ポイントの具体的な温度値を示すことができ、検出結果がより直観的かつ正確であり、故障ポイントの判断と後期処理に直観的で確実な根拠を提供している。これは、従来技術が及ばないことである。
【0063】
c.従来技術の赤外線ポイント温度測定装置が測定した温度値は、ある検出区域(該検出区域の面積が温度測定距離に正比例する)の平均温度であるため、赤外線ポイント温度測定装置が路面まで近ければ近いほど、検出区域の面積が小さくなり、赤外線ポイント温度測定装置が路面まで遠ければ遠いほど、検出区域の面積が大きくなる。しかし、赤外線ポイント温度測定装置が測定した温度が一定の精度要求を満足しなければならないため、正確に温度を測定するには、赤外線ポイント温度測定装置をあまり路面より遠い位置に取り付けてはならない。すると、一台の赤外線ポイント温度測定装置が毎回検出する面積は非常に限られ、たとえ一台の検出用車両に複数台の赤外線温度測定装置を多く取り付けても、一回で一本の車線しか監視できないので、多車線路面の全面的検出を実現するには、時間と手間がかかる。一方、本発明は、レンズの視界角を調節することにより被検出物体の被検出範囲を変更可能であり、たとえば四車線の高速道路の路面全体に対する同時検出を容易に実現できる。これは、従来技術が及ばないことであり、検出効率と正確性が大きく高められている。
【0064】
上記実施例において、本発明は、赤外線撮影技術を舗装済みの高速道路などのアスファルト路面又はその他の路面の欠陥検出に応用しているが、もちろん本発明の実施例はこれに限られるものではなく、該技術を建設中の路面工事現場に応用することもでき、高速道路などアスファルト路面の舗装作業のために、アスファルト舗装均一度に関する赤外線熱画像参考画面と関連データを提供し、工事の品質を保証する。
【0065】
以上、図面を参照して本発明の複数の実施例について具体的に記載したが、本公開内容の原理の精神と範囲内に、当業者がその他の数多くの変化と実施例を当たり前のように導き出せることが理解されよう。特に、該公開、図面及び特許請求の範囲内に、部品及び/又は部品の設置の組合せについて多種類の変化と改良を行うことができる。部品及び/又は付属部品の変化と改良以外、その他の選択可能な応用についても、当業者にとって明らかなものである。
【符号の説明】
【0066】
1 検出用車両
2 雲台
21 本体台座
22 縦駆動モータ
23 縦回転機構
24 水平駆動モータ
25 水平回転機構
26 固定用フレーム
3 赤外線熱画像装置
4 マスタコントローラ
41 USB信号変換ボード
42 USBインタフェース
43 データ分析制御モジュール
5 データプロセッサ
51 データ入力インタフェース
52 データ分析モジュール
53 記憶モジュール
54 表示モジュール
6 距離測定装置
7 データ伝送装置
【特許請求の範囲】
【請求項1】
路面欠陥検出システムであって、
被検出路面上を走行する検出用車両(1)と、
該検出用車両(1)に設けられ、該検出用車両(1)に対して水平回転及び縦回転する雲台(2)と、
該雲台(2)に取り外し可能に設けられ、上記被検出路面の赤外線熱画像を撮影し、温度値を含む該被検出路面の赤外線熱画像に関する赤外線熱画像デジタル信号を出力するための赤外線熱画像装置(3)と、
該検出用車両(1)に設けられ、該雲台(2)と該赤外線熱画像装置(3)にそれぞれ接続され、該赤外線熱画像装置(3)の撮影動作及び該雲台(2)の水平回転角度と縦回転角度を制御し、該赤外線熱画像装置(3)から出力された赤外線熱画像デジタル信号を標準ネットワーク伝送用の赤外線デジタル信号に変換するためのマスタコントローラ(4)と、
上記赤外線熱画像装置(3)に対する制御信号を生成して出力し、上記赤外線デジタル信号を受信して分析・処理を行なうことにより、上記被検出路面の欠陥の種類と欠陥の位置情報を特定するためのデータプロセッサ(5)とを含むことを特徴とする路面欠陥検出システム。
【請求項2】
請求項1に記載の路面欠陥検出システムにおいて、
該マスタコントローラ(4)は、
該赤外線熱画像装置(3)によって撮影した温度値を含む赤外線熱画像デジタル信号をUSB信号に変換するUSB信号変換ボード(41)と、
上記USB信号を伝送するためのUSBインタフェース(42)と、
該USBインタフェース(42)からのUSB信号を標準ネットワーク伝送用の上記赤外線デジタル信号に変換して、リアルタイムでネットワーク回線を介して該データプロセッサ(5)に送信し、該データプロセッサ(5)からの距離測定信号に基づいて熱画像装置制御信号を生成して該赤外線熱画像装置(3)に送信してその撮影動作を制御し、該データプロセッサ(5)からの雲台制御信号に基づいて雲台駆動信号を生成して該雲台(2)に送信してその水平回転と縦回転を制御するデータ分析制御モジュール(43)とを含むことを特徴とする路面欠陥検出システム。
【請求項3】
請求項2に記載の路面欠陥検出システムにおいて、
該マスタコントローラ(4)は該赤外線熱画像装置(3)とともに一つの防護カバーに設けられることを特徴とする路面欠陥検出システム。
【請求項4】
請求項1に記載の路面欠陥検出システムにおいて、
該雲台(2)は、
該検出用車両(1)に固設される本体台座(21)と、
該本体台座(21)の中に設けられる縦駆動モータ(22)と、
該本体台座(21)に設けられ、該縦駆動モータ(22)に連動して縦回転する縦回転機構(23)と、
該本体台座(21)の中に設けられる水平駆動モータ(24)と、
該縦回転機構(23)に設けられ、該水平駆動モータ(24)に連動して水平回転するとともに、該縦回転機構(23)に追従して縦回転する水平回転機構(25)と、
該水平回転機構(25)に設けられ、該赤外線熱画像装置(3)の本体を取り外し可能に固定するための固定用フレーム(26)とを含むことを特徴とする路面欠陥検出システム。
【請求項5】
請求項1に記載の路面欠陥検出システムにおいて、
該データプロセッサ(5)は、
該マスタコントローラ(4)からの赤外線デジタル信号を受信するデータ入力インタフェース(51)と、
データ入力インタフェース(51)からの赤外線デジタル信号に対して、路面欠陥分析ソフトウェアを応用してスクリーンショット処理及びデータ分析を行ない、処理後データに基づいて、被検出路面上の欠陥の種類、欠陥の位置情報を特定するデータ分析モジュール(52)と、
上記処理後データ及び特定結果を記憶する記憶モジュール(53)とを含むことを特徴とする路面欠陥検出システム。
【請求項6】
請求項5に記載の路面欠陥検出システムにおいて、
該データプロセッサ(5)は、被検出路面の赤外線熱画像、赤外線デジタル信号、欠陥の種類、欠陥の発生位置及び対処提案を直観的に表示するための表示モジュール(54)を更に含むことを特徴とする路面欠陥検出システム。
【請求項7】
請求項5に記載の路面欠陥検出システムにおいて、
該データプロセッサ(5)のデータ入力インタフェース(51)は、RJ45標準ネットワークインタフェース経由で該マスタコントローラ(4)との間にデータ伝送とネットワーク通信を実現することを特徴とする路面欠陥検出システム。
【請求項8】
請求項1に記載の路面欠陥検出システムにおいて、
該検出用車両(1)の車輪に設けられ、該データプロセッサ(5)に接続される距離測定装置(6)を更に含み、
該データプロセッサ(5)は、該距離測定装置(6)からの車両速度パルス信号を受信して距離測定信号に換算し、上記距離測定信号を該マスタコントローラ(4)に出力し、よって、該マスタコントローラ(4)は、上記距離測定信号に基づいて、熱画像装置制御信号を生成して該赤外線熱画像装置(3)の撮影動作を制御することを特徴とする路面欠陥検出システム。
【請求項9】
請求項1に記載の路面欠陥検出システムにおいて、
該マスタコントローラ(4)と該データプロセッサ(5)にそれぞれ接続し、両者間のネットワーク通信を実現するデータ伝送装置(7)を更に含むことを特徴とする路面欠陥検出システム。
【請求項10】
請求項9に記載の路面欠陥検出システムにおいて、
該データ伝送装置(7)は、ネットワーク回線経由で該マスタコントローラ(4)と該データプロセッサ(5)に接続するルータであることを特徴とする路面欠陥検出システム。
【請求項11】
請求項1〜10のいずれか一項に記載の赤外線撮影技術に基づく路面欠陥検出システムを応用して被検出路面の欠陥を検出する路面欠陥検出方法であって、
検出用車両(1)が基本的に均一の時速で該被検出路面上を走行するステップ1と、
データプロセッサ(5)からの雲台制御信号に基づいて、マスタコントローラ(4)が雲台駆動信号を生成して、雲台(2)の水平回転と縦回転を駆動するステップ2と、
距離測定装置(6)からの車両速度パルス信号に基づいて、所定距離を設定するステップ3と、
赤外線熱画像装置(3)の撮影トリガー装置に対して、該所定距離おきに一つのトリガー信号を送信し、該赤外線熱画像装置(3)が、上記トリガー信号に基づいて、該被検出路面の赤外線熱画像を自動的に撮影し、該赤外線熱画像が赤外線デジタル画像であり、各ポイントに具体的な温度値が含まれるステップ4と、
該赤外線熱画像装置(3)が、撮影した各フレームの温度値を含む赤外線熱画像デジタル信号をリアルタイムで該マスタコントローラ(4)にデータ線を介して伝送し、該マスタコントローラ(4)が、上記赤外線熱画像デジタル信号を標準ネットワーク伝送用の赤外線デジタル信号に変換して該データプロセッサ(5)に伝送するステップ5と、
該データプロセッサ(5)が、上記赤外線デジタル信号に対して、路面欠陥分析ソフトウェアを応用してスクリーンショット処理及びデータ分析を行ない、被検出路面の連続的な温度分布記録図を与えるとともに、温度傾向分析曲線を取得し、路面撮影時間及び各ポイントの対応温度を正確に反映するステップ6と、
該温度分布記録図における温度データに明らかな差異が現れるとき、該路面欠陥分析ソフトウェアを応用して路面欠陥の種類と欠陥の位置情報を特定するステップ7とを含むことを特徴とする路面欠陥検出方法。
【請求項12】
請求項11に記載の路面欠陥検出方法において、
上記所定距離は、2メートルであることを特徴とする路面欠陥検出方法。
【請求項13】
請求項11に記載の路面欠陥検出方法において、
ステップ7を実行した後、該検出用車両(1)が被検出路面の終点に達したか否かを判断し、判断結果により、終点に達していないと示される場合、ステップ4に戻るステップ8を更に含むことを特徴とする路面欠陥検出方法。
【請求項14】
請求項13に記載の路面欠陥検出方法において、
ステップ8を実行した後、判断結果により終点に達したと示される場合、分析者が、欠陥が現れたすべての画像を一つ一つ分析・判断し、対処結論及び/又は採用されうる対処提案を提示し、故障報告をプリントアウトして保管し、該データプロセッサ(5)が、欠陥が現れた画像と関連データを路面欠陥分析ソフトウェアのデータベースに導入して記憶するステップ9を更に含むことを特徴とする路面欠陥検出方法。
【請求項15】
請求項11に記載の路面欠陥検出方法において、
ステップ7において、異常変化のある温度分布記録図と温度曲線について、該データプロセッサ(5)が同時に自動警報を行なうことを特徴とする路面欠陥検出方法。
【請求項16】
請求項11に記載の路面欠陥検出方法において、
ステップ7において、該データプロセッサ(5)が、検出起点の座標、該所定距離の大きさ、及び欠陥あり画像がすべての画像において何枚目なのかの位置情報に基づいて、上記欠陥の位置情報を自動的に換算することを特徴とする路面欠陥検出方法。
【請求項17】
請求項11に記載の路面欠陥検出方法において、
ステップ7を実行した後、赤外線熱画像装置(3)の撮影角度の変更が必要か否かを判断し、判断結果により必要であると示される場合、ステップ2に戻るが、判断結果により必要でないと示される場合、ステップ4に戻るステップ10を更に含むことを特徴とする路面欠陥検出方法。
【請求項1】
路面欠陥検出システムであって、
被検出路面上を走行する検出用車両(1)と、
該検出用車両(1)に設けられ、該検出用車両(1)に対して水平回転及び縦回転する雲台(2)と、
該雲台(2)に取り外し可能に設けられ、上記被検出路面の赤外線熱画像を撮影し、温度値を含む該被検出路面の赤外線熱画像に関する赤外線熱画像デジタル信号を出力するための赤外線熱画像装置(3)と、
該検出用車両(1)に設けられ、該雲台(2)と該赤外線熱画像装置(3)にそれぞれ接続され、該赤外線熱画像装置(3)の撮影動作及び該雲台(2)の水平回転角度と縦回転角度を制御し、該赤外線熱画像装置(3)から出力された赤外線熱画像デジタル信号を標準ネットワーク伝送用の赤外線デジタル信号に変換するためのマスタコントローラ(4)と、
上記赤外線熱画像装置(3)に対する制御信号を生成して出力し、上記赤外線デジタル信号を受信して分析・処理を行なうことにより、上記被検出路面の欠陥の種類と欠陥の位置情報を特定するためのデータプロセッサ(5)とを含むことを特徴とする路面欠陥検出システム。
【請求項2】
請求項1に記載の路面欠陥検出システムにおいて、
該マスタコントローラ(4)は、
該赤外線熱画像装置(3)によって撮影した温度値を含む赤外線熱画像デジタル信号をUSB信号に変換するUSB信号変換ボード(41)と、
上記USB信号を伝送するためのUSBインタフェース(42)と、
該USBインタフェース(42)からのUSB信号を標準ネットワーク伝送用の上記赤外線デジタル信号に変換して、リアルタイムでネットワーク回線を介して該データプロセッサ(5)に送信し、該データプロセッサ(5)からの距離測定信号に基づいて熱画像装置制御信号を生成して該赤外線熱画像装置(3)に送信してその撮影動作を制御し、該データプロセッサ(5)からの雲台制御信号に基づいて雲台駆動信号を生成して該雲台(2)に送信してその水平回転と縦回転を制御するデータ分析制御モジュール(43)とを含むことを特徴とする路面欠陥検出システム。
【請求項3】
請求項2に記載の路面欠陥検出システムにおいて、
該マスタコントローラ(4)は該赤外線熱画像装置(3)とともに一つの防護カバーに設けられることを特徴とする路面欠陥検出システム。
【請求項4】
請求項1に記載の路面欠陥検出システムにおいて、
該雲台(2)は、
該検出用車両(1)に固設される本体台座(21)と、
該本体台座(21)の中に設けられる縦駆動モータ(22)と、
該本体台座(21)に設けられ、該縦駆動モータ(22)に連動して縦回転する縦回転機構(23)と、
該本体台座(21)の中に設けられる水平駆動モータ(24)と、
該縦回転機構(23)に設けられ、該水平駆動モータ(24)に連動して水平回転するとともに、該縦回転機構(23)に追従して縦回転する水平回転機構(25)と、
該水平回転機構(25)に設けられ、該赤外線熱画像装置(3)の本体を取り外し可能に固定するための固定用フレーム(26)とを含むことを特徴とする路面欠陥検出システム。
【請求項5】
請求項1に記載の路面欠陥検出システムにおいて、
該データプロセッサ(5)は、
該マスタコントローラ(4)からの赤外線デジタル信号を受信するデータ入力インタフェース(51)と、
データ入力インタフェース(51)からの赤外線デジタル信号に対して、路面欠陥分析ソフトウェアを応用してスクリーンショット処理及びデータ分析を行ない、処理後データに基づいて、被検出路面上の欠陥の種類、欠陥の位置情報を特定するデータ分析モジュール(52)と、
上記処理後データ及び特定結果を記憶する記憶モジュール(53)とを含むことを特徴とする路面欠陥検出システム。
【請求項6】
請求項5に記載の路面欠陥検出システムにおいて、
該データプロセッサ(5)は、被検出路面の赤外線熱画像、赤外線デジタル信号、欠陥の種類、欠陥の発生位置及び対処提案を直観的に表示するための表示モジュール(54)を更に含むことを特徴とする路面欠陥検出システム。
【請求項7】
請求項5に記載の路面欠陥検出システムにおいて、
該データプロセッサ(5)のデータ入力インタフェース(51)は、RJ45標準ネットワークインタフェース経由で該マスタコントローラ(4)との間にデータ伝送とネットワーク通信を実現することを特徴とする路面欠陥検出システム。
【請求項8】
請求項1に記載の路面欠陥検出システムにおいて、
該検出用車両(1)の車輪に設けられ、該データプロセッサ(5)に接続される距離測定装置(6)を更に含み、
該データプロセッサ(5)は、該距離測定装置(6)からの車両速度パルス信号を受信して距離測定信号に換算し、上記距離測定信号を該マスタコントローラ(4)に出力し、よって、該マスタコントローラ(4)は、上記距離測定信号に基づいて、熱画像装置制御信号を生成して該赤外線熱画像装置(3)の撮影動作を制御することを特徴とする路面欠陥検出システム。
【請求項9】
請求項1に記載の路面欠陥検出システムにおいて、
該マスタコントローラ(4)と該データプロセッサ(5)にそれぞれ接続し、両者間のネットワーク通信を実現するデータ伝送装置(7)を更に含むことを特徴とする路面欠陥検出システム。
【請求項10】
請求項9に記載の路面欠陥検出システムにおいて、
該データ伝送装置(7)は、ネットワーク回線経由で該マスタコントローラ(4)と該データプロセッサ(5)に接続するルータであることを特徴とする路面欠陥検出システム。
【請求項11】
請求項1〜10のいずれか一項に記載の赤外線撮影技術に基づく路面欠陥検出システムを応用して被検出路面の欠陥を検出する路面欠陥検出方法であって、
検出用車両(1)が基本的に均一の時速で該被検出路面上を走行するステップ1と、
データプロセッサ(5)からの雲台制御信号に基づいて、マスタコントローラ(4)が雲台駆動信号を生成して、雲台(2)の水平回転と縦回転を駆動するステップ2と、
距離測定装置(6)からの車両速度パルス信号に基づいて、所定距離を設定するステップ3と、
赤外線熱画像装置(3)の撮影トリガー装置に対して、該所定距離おきに一つのトリガー信号を送信し、該赤外線熱画像装置(3)が、上記トリガー信号に基づいて、該被検出路面の赤外線熱画像を自動的に撮影し、該赤外線熱画像が赤外線デジタル画像であり、各ポイントに具体的な温度値が含まれるステップ4と、
該赤外線熱画像装置(3)が、撮影した各フレームの温度値を含む赤外線熱画像デジタル信号をリアルタイムで該マスタコントローラ(4)にデータ線を介して伝送し、該マスタコントローラ(4)が、上記赤外線熱画像デジタル信号を標準ネットワーク伝送用の赤外線デジタル信号に変換して該データプロセッサ(5)に伝送するステップ5と、
該データプロセッサ(5)が、上記赤外線デジタル信号に対して、路面欠陥分析ソフトウェアを応用してスクリーンショット処理及びデータ分析を行ない、被検出路面の連続的な温度分布記録図を与えるとともに、温度傾向分析曲線を取得し、路面撮影時間及び各ポイントの対応温度を正確に反映するステップ6と、
該温度分布記録図における温度データに明らかな差異が現れるとき、該路面欠陥分析ソフトウェアを応用して路面欠陥の種類と欠陥の位置情報を特定するステップ7とを含むことを特徴とする路面欠陥検出方法。
【請求項12】
請求項11に記載の路面欠陥検出方法において、
上記所定距離は、2メートルであることを特徴とする路面欠陥検出方法。
【請求項13】
請求項11に記載の路面欠陥検出方法において、
ステップ7を実行した後、該検出用車両(1)が被検出路面の終点に達したか否かを判断し、判断結果により、終点に達していないと示される場合、ステップ4に戻るステップ8を更に含むことを特徴とする路面欠陥検出方法。
【請求項14】
請求項13に記載の路面欠陥検出方法において、
ステップ8を実行した後、判断結果により終点に達したと示される場合、分析者が、欠陥が現れたすべての画像を一つ一つ分析・判断し、対処結論及び/又は採用されうる対処提案を提示し、故障報告をプリントアウトして保管し、該データプロセッサ(5)が、欠陥が現れた画像と関連データを路面欠陥分析ソフトウェアのデータベースに導入して記憶するステップ9を更に含むことを特徴とする路面欠陥検出方法。
【請求項15】
請求項11に記載の路面欠陥検出方法において、
ステップ7において、異常変化のある温度分布記録図と温度曲線について、該データプロセッサ(5)が同時に自動警報を行なうことを特徴とする路面欠陥検出方法。
【請求項16】
請求項11に記載の路面欠陥検出方法において、
ステップ7において、該データプロセッサ(5)が、検出起点の座標、該所定距離の大きさ、及び欠陥あり画像がすべての画像において何枚目なのかの位置情報に基づいて、上記欠陥の位置情報を自動的に換算することを特徴とする路面欠陥検出方法。
【請求項17】
請求項11に記載の路面欠陥検出方法において、
ステップ7を実行した後、赤外線熱画像装置(3)の撮影角度の変更が必要か否かを判断し、判断結果により必要であると示される場合、ステップ2に戻るが、判断結果により必要でないと示される場合、ステップ4に戻るステップ10を更に含むことを特徴とする路面欠陥検出方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−177675(P2012−177675A)
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願番号】特願2011−140147(P2011−140147)
【出願日】平成23年6月24日(2011.6.24)
【出願人】(507024002)廣州颯特紅外股▲ふん▼有限公司 (4)
【Fターム(参考)】
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願日】平成23年6月24日(2011.6.24)
【出願人】(507024002)廣州颯特紅外股▲ふん▼有限公司 (4)
【Fターム(参考)】
[ Back to top ]