
路面状態判定装置及び路面状態判定方法
【課題】従前の路面状態判定基準が適用できなくなった場合でも,誤判定を回避するような路面状態判定装置を提供する。
【解決手段】路面状態判定装置において,走行音を取得する走行音取得部と,走行音ごとに路面状態を対応付けた路面状態判定基準を格納した記憶部と,地図情報に路面の舗装種別を対応付けて記憶した自車位置検出部から走行路面の舗装種別を検出する舗装種別検出部と,検出した舗装種別に応じた路面状態判定基準を用いて取得した走行音に対応する路面状態を判定する路面状態判定部と,走行路面の路面状態を外部の情報源から取得する路面状態取得部とを有する。そして,判定した路面状態と取得された路面状態が異なる場合は,走行路面の舗装種別が路面状態判定基準において当該走行音と取得された路面状態により特定される舗装種別となるように,舗装種別検出部の記憶内容を変更する。
【解決手段】路面状態判定装置において,走行音を取得する走行音取得部と,走行音ごとに路面状態を対応付けた路面状態判定基準を格納した記憶部と,地図情報に路面の舗装種別を対応付けて記憶した自車位置検出部から走行路面の舗装種別を検出する舗装種別検出部と,検出した舗装種別に応じた路面状態判定基準を用いて取得した走行音に対応する路面状態を判定する路面状態判定部と,走行路面の路面状態を外部の情報源から取得する路面状態取得部とを有する。そして,判定した路面状態と取得された路面状態が異なる場合は,走行路面の舗装種別が路面状態判定基準において当該走行音と取得された路面状態により特定される舗装種別となるように,舗装種別検出部の記憶内容を変更する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は,走行路面の路面状態を判定する路面状態判定装置及び路面状態判定方法に関し,特に,走行音等の特徴に基づく路面状態の判定結果が外部から取得した路面状態情報と異なる場合は,判定に用いる情報を修正する路面状態判定装置及び路面状態判定方法に関する。
【背景技術】
【0002】
車両の操縦安定制御に寄与するために,車両が走行する路面の路面状態,つまり,乾燥路面か,冠水路面か,あるいは積雪や凍結の有無などを判定する路面状態判定方法が種々提案されている。
【0003】
例えば,車両のタイヤが路面との摩擦により発する走行音から特徴量を抽出し,その特徴量に基づき路面状態を判定する方法が特許文献1及び2に記載されている。さらに,車両前方の路面を撮像し,撮像した画像から抽出した特徴量を所定の基準値と比較することにより路面状態を判定する方法が,特許文献3及び4に記載されている。
【特許文献1】特開平8−261993号公報
【特許文献2】特開平8−298613号公報
【特許文献3】特開平9−14957号公報
【特許文献4】特開2002−310896号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら,従来の技術では,次のような問題点がある。すなわち,従来の路面状態判定方法は,予め走行音や路面画像の特徴量に路面状態を対応付けた参照用データを用意しておき,そのデータと観測された走行音や路面画像の特徴量とを比較して観測結果に対応する路面状態を求め判定結果とする。よって,道路環境の変化等により当初の参照用データが適用できない状況では,誤判定が生じてしまう。
【0005】
例えば,路面の舗装が変更された場合,変更の前後では走行音や路面の色などが異なる。また,同じ舗装種別の路面でも,経年劣化により走行音や路面の色が変化する。さらに,車両のタイヤも磨耗するので,走行音が経年変化する。こうした状況では,路面状態判定の基になる走行音や路面画像の特徴が変化したため従前の参照用データと不一致が生じており,従前の参照用データを判定基準として適用できなくなる。
【0006】
そこで,本発明の目的は,従前の判定基準が適用できなくなった場合でも,誤判定を回避するような路面状態判定装置及び路面状態判定方法を提供することにある。
【課題を解決するための手段】
【0007】
上記の目的を達成するために,本発明の第1の側面によれば,車両に搭載され,走行路面の路面状態を判定する路面状態判定装置において,タイヤから発する走行音を取得する走行音取得部と,路面の舗装種別ごとに走行音と路面状態を対応付けた路面状態判定基準を格納した記憶部と,路面の舗装種別を有する地図情報を記憶し,自車位置と前記地図情報に基づいて,前記走行路面の舗装種別を検出する舗装種別検出部と,前記路面状態判定基準に基づき,検出された舗装種別と前記取得された走行音とに対応する当該走行路面の路面状態を判定する路面状態判定部と,当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部とを有する。そして,前記路面状態判定部は,前記判定された路面状態と前記取得された路面状態が異なる場合には,当該走行路面の舗装種別が,前記路面状態判定基準において当該走行音と当該取得された路面状態により特定される舗装種別となるように,前記舗装種別検出部の記憶内容を変更することを特徴とする。
【0008】
上記第1の側面における路面状態判定装置によれば,実際の路面状態と異なる路面状態の判定結果を得た場合には,路面状態判定基準を選択するキーとなる舗装種別を,正しい判定結果が得られる路面状態判定基準を選択するような舗装種別情に修正する。よって,以後同じ位置の路面において正確な判定結果を得ることができる。
【0009】
本発明の第2の側面における路面状態判定装置は,タイヤから発する走行音を取得する走行音取得部と,路面の舗装種別ごとに走行音と路面状態とを対応付けた路面状態判定基準を格納した記憶部と,路側に設置された路側機から路面の舗装種別を含む道路環境情報を受信し,前記走行路面の舗装種別を取得する舗装種別取得部と,前記路面状態判定基準に基づき,前記取得された舗装種別と前記取得された走行音とに対応する当該走行路面の路面状態を判定する路面状態判定部と,当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部とを有し,前記路面状態判定部は,前記判定された路面状態が前記取得された路面状態と異なる場合には,前記路面状態判定基準において当該走行音に対応する路面状態が当該取得された路面状態となるように,前記記憶部の記憶内容を変更することを特徴とする。
【0010】
上記第2の側面における路面状態判定装置によれば,道路環境情報からリアルタイムに得られ信頼性の高い舗装種別情報に基づいて,路面状態判定基準に格納されている走行音に実際の路面状態が対応するように路面状態判定基準を修正する。よって,以後同じ舗装種別の路面状態判定において正しい判定結果を得ることができる。
【0011】
本発明の第3の側面における路面状態判定装置は,タイヤから発する走行音を取得する走行音取得部と,走行路面前方の画像を撮像する路面画像取得部と,路面の舗装種別ごとに走行音と路面状態を対応付けた音声用路面状態判定基準と,路面の舗装種別ごとに路面画像と路面状態を対応付けた画像用路面状態判定基準とを格納した記憶部と,路面の舗装種別を有する地図情報を記憶し,自車位置と前記地図情報に基づいて,前記走行路面の舗装種別を検出する舗装種別検出部と,前記音声用路面状態判定基準に基づき,前記検出された舗装種別と前記取得された走行音に対応する当該走行路面の第1の路面状態を判定し,前記画像用路面状態判定基準に基づき,前記検出された舗装種別と前記取得された路面画像に対応する当該走行路面の第2の路面状態とを判定する路面状態判定部とを有する,そして,前記路面状態判定部は,前記第1の路面状態と第2の路面状態とが同じ場合は,当該路面状態を他の装置に出力し,前記第1の路面状態と第2の路面状態とが異なり,且つ前記取得した路面画像が所定の条件を満たさない場合は,前記第1の路面状態を他の装置に出力し,前記第1の路面状態と第2の路面状態とが異なり,且つ前記取得した路面画像が前記所定の条件を満たす場合は,前記第2の路面状態を他の装置に出力することを特徴とする。
【0012】
上記第3の側面における路面状態判定装置によれば,通常時は,進行方向前方の路面画像に基づき未来位置における路面状態の判定を行うので,路面を通過時に収集した走行音に基づく判定より有益な判定結果を得ることができる。また,降雨・降雪,霧などの悪天候のために画像による判定精度が低い場合は,走行音による路面判定を用い,路面状態判定装置全体としての判定精度を良好に保つことができる。
【発明の効果】
【0013】
本発明における路面状態判定装置によれば,舗装種別に基づく判定結果が道路交通情報などから取得した実際の路面状態と異なる場合には,その位置における路面の舗装種別や路面状態判定基準を修正するので,以後同じ位置や舗装種別においては正確な判定結果を得ることができる。さらに,路面画像による路面状態判定と走行音による路面状態判定を併用し,天候などの条件に応じて精度の高い判定が可能な方を優先して用いるので,路面状態判定装置全体としての判定精度を良好に保つことができる。
【発明を実施するための最良の形態】
【0014】
以下,図面にしたがって本発明の実施の形態について説明する。但し,本発明の技術的範囲はこれらの実施の形態に限定されず,特許請求の範囲に記載された事項とその均等物まで及ぶものである。
【0015】
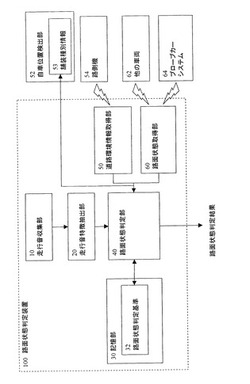
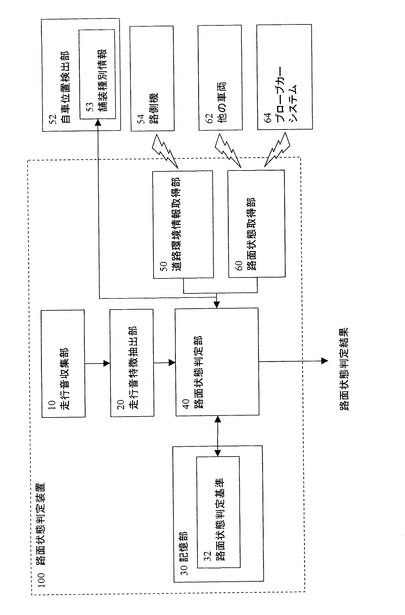
図1は,本実施の形態における路面状態判定装置の構成図である。図1は走行音に基づき走行路面の路面状態判定を行う路面状態判定装置100を示している。
【0016】
この路面状態判定装置100は,車両のタイヤが走行中に路面との摩擦により発する走行音を収集する走行音収集部10と,走行音特徴抽出部20と,路面状態判定基準32を格納した記憶部30と,道路環境情報を取得する道路環境情報取得部50と,実際の路面状態の情報を取得する路面状態取得部60と,路面状態を判定する路面状態判定部40とから構成される。更に,路面状態判定装置100は,自車に搭載された自車位置検出部52,車外の路側機54,他の車両62,プローブカーシステム64などから種々の情報を取得し,路面結果の判定に用いる。各部の機能及び動作は次のとおりである。
【0017】
走行音収集部10は車両のタイヤ近傍に設置されるマイクロフォンであり,タイヤが発する走行音を収集して電気信号に変換する。そして走行音特徴抽出部20は,走行音収集部10が出力する音声信号に基づき,周波数解析を行って走行音の特徴量を抽出する。例えば,走行音の特徴量は所定の周波数域の音圧レベルであり,路面の舗装種別と乾燥や冠水などの路面状態との組み合わせに応じて異なる値を示すものである。これら走行音収集部10と走行音特徴抽出部20とで,走行音取得部に対応する。
【0018】
記憶部30は,書き換え可能な不揮発性記憶装置であり,路面状態判定基準32を記憶している。路面状態判定基準32は,路面の舗装種別に応じて選択される複数の判定テーブルを有しており,各テーブルには走行音の特徴量と対応付けられた路面状態が記憶されている音声データ用の路面状態判定基準である。
【0019】
自車位置検出部52は,GPS衛星からの信号を受信することにより自車の位置を検出するカーナビゲーション装置であり,地図情報と共に路面の舗装種別情報53を有している。よって,自車位置検出部52からは,自車の位置における路面の舗装種別を取得することができ,自車位置検出部52は舗装種別検出部に対応する。
【0020】
道路環境情報取得部50は,路側に設置された電波ビーコンや光ビーコンなどの路側機54から道路環境情報を受信する機能を有している。道路環境情報は,財団法人日本道路交通情報センターがVICS(Vehicle Information and Communication System)で提供する,道路の種別・位置,道路の渋滞・規制,区間の旅行時間などの情報である。この道路環境情報に路面の舗装種別が付加されることによって,走行中の路面の舗装種別をリアルタイムに取得することができる。よって,道路環境情報取得部50は舗装種別取得部に対応する。
【0021】
路面状態取得部60は,他の車両62やプローブカーシステム64といった車外の情報源との無線通信を行う。車車間通信やプローブカーシステムは自動車を移動体の観測装置とした双方向の情報インフラであり,これらのシステムからは各自動車から収集した渋滞情報,天候情報などの道路交通情報を取得できる。よって,このような道路交通情報に走行路面の路面状態が付加されることによって,路面状態取得部60は実際の走行路面状態を取得することができる。
【0022】
路面状態判定部40は,制御プログラムとマイクロプロセッサにより構成され,自車位置検出部52もしくは道路環境情報取得部50から取得した走行路面の舗装種別と,走行音抽出部20が抽出した走行音の特徴量に基づき,記憶部30に格納された路面状態判定基準32を参照して舗装種別と走行音特徴に対応した路面状態を判定する。具体的には,まず走行路面の舗装種別に適した判定テーブルを選択し,その判定テーブルにおいて走行音の所定周波数における音圧レベルに対応する路面状態を求め判定結果とする。
【0023】
そして,路面状態の判定結果と路面状態取得部60から提供される実際の路面状態とを比較し,後述する手順に従い判定結果の正誤を判断して,より信頼性の高い路面状態判定結果をドライバへの通知機能や操縦安定制御機能などを備えた他の装置へ出力する。更に,判定結果が実際の路面状態と異なる場合は,自車位置検出部52の舗装種別情報53もしくは路面状態判定基準32の内容を次のように修正する。
【0024】
まず,舗装種別情報53の舗装種別に応じて路面状態判定基準32を選択し,その路面状態判定基準を用いて実際の路面状態と異なる判定結果を得た場合には,路面状態判定基準選択の基となる舗装種別情報が不適切であるので,正しい判定結果が得られる路面状態判定基準を選択するようにその位置における路面の舗装種別情報を修正する。
【0025】
また,前記道路環境情報から取得した走行路面の舗装種別に基づいて路面状態判定基準を選択し,その路面状態判定基準を用いて実際の路面状態と異なる判定結果を得た場合には,自車のタイヤの磨耗等に起因して走行音が変化した場合に該当するので,正しい判定結果が得られるように路面状態判定基準32の内容を修正する。
【0026】
次に,上述した路面状態判定装置100により路面状態の判定に用いられ,判定結果に基づいて修正されるデータについて図2を用いて説明する。
【0027】
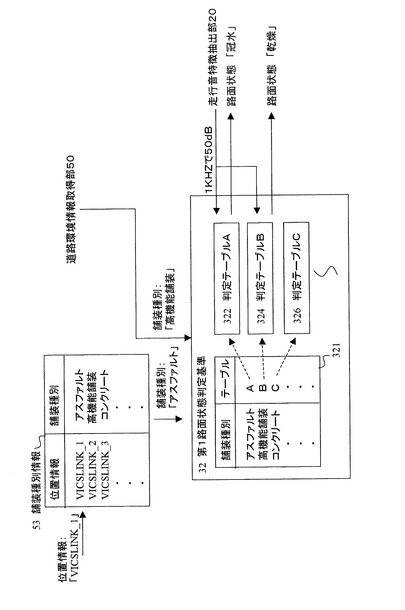
図2は,舗装種別情報53と路面状態判定基準32のデータ構造の一例を説明する図である。まず,舗装種別情報53には,位置情報と舗装種別が対応付けて格納されている。位置情報としては,VICSで規格化された位置情報であるVICSリンクを用いる。また,緯度経度などを用いることも可能である。
【0028】
それぞれのVICSリンクに対しては,路面の舗装種別,例えば「アスファルト」,「高機能舗装」,「コンクリート」…等を対応づけてある。さらに,同じ舗装種別でも舗装されてからの経過時間により「2年未満」,「3年以上5年未満」,「5年以上」などとランク分けすることもできる。
【0029】
次に,路面状態判定基準32について説明する。路面状態判定基準32には,走行音の所定周波数の音圧レベルに,「乾燥」,「冠水」,「水膜」,「積雪」,「凍結」などの路面状態が対応付けられた判定テーブルA322,判定テーブルB324,判定テーブルC326…が格納されている。
【0030】
これらの判定テーブルでは,テーブルごとに走行音の特徴量と路面状態との対応関係が異なっている。例えば,判定テーブルA322において1KHzの周波数での音圧レベル50dBには「冠水」という結果が対応しているが,判定テーブルB324においては1KHzでの50dBには「乾燥」が対応している。よって,路面の舗装種別に適合した対応関係を有する判定テーブルが,舗装種別に応じて選択される。
【0031】
なお,これら判定テーブルと舗装種別との関係はマスタテーブル321に収められている。例えば,「アスファルト」舗装の路面での状態判定には判定テーブルA322,「高機能舗装」には判定テーブルB324を用いる。
【0032】
路面状態判定部40は,上述のような舗装種別情報53と路面状態判定基準32とを用いて次のように路面状態を判定する。まず,自車位置検出部52が検出した自車位置の位置情報に基づき,例えば位置情報が「VICSLINK_1」である路面の舗装種別「アスファルト」を取得する。次に,路面状態判定基準32のマスタテーブル321を参照して舗装種別「アスファルト」に対応する判定テーブルA322を選択する。
【0033】
また,走行音特徴抽出部20が抽出した特徴量が,例えば周波数1KHzでの音圧レベル50dBであったとする。すると,路面状態判定部40は,判定テーブルA322において,この走行音の特徴量に対応する路面状態「冠水」を得る。
【0034】
すると,路面状態判定部40は判定結果の正誤を判断を行う。まず,上記判定結果である路面状態「冠水」と,路面状態取得部60から取得した実際の路面状態を比較する。ここで,実際の路面状態が「乾燥」であったとすると,判定結果は実際の路面状態とは異なっており,誤判定である。これは舗装別情報53の情報が古くなっており,実際の路面の舗装種別と異なっていることを意味する。
【0035】
そこで,路面状態判定部40は,走行音の周波数1KHzでの音圧レベル50dBに路面状態「乾燥」が対応している判定テーブルを検索し,判定テーブルB324を抽出する。すると,マスタテーブル321において,判定テーブルBは「高機能舗装」用の判定テーブルであることが検出できるので,舗装種別情報53の,位置情報「VICS_LINK1」における舗装種別「アスファルト」を「高機能舗装」に変更する。
【0036】
上述のような修正を行うことにより,以後は位置情報「VICS_LINK1」における走行路面の路面状態判定には,道路交通情報から実際の路面状態を取得しなくても,「高機能舗装」用の判定テーブルB324を用いて正確な判定を行うことが可能となる。
【0037】
次に,路面状態判定部40が,道路環境情報から取得したよりリアルタイムで信頼性の高い走行路面の舗装種別に基づいて判定を行った場合について説明する。まず,道路環境情報取得部50は,電波ビーコンなどの路側機54から,道路環境情報を受信し,走行路面の舗装種別として,例えば「高機能舗装」を取得する。そして,路面状態判定部40はこの情報を受け取り,路面状態判定基準32において,「高機能舗装」の路面状態を判定テーブルB324を用いて走行音に対応する路面状態を判定する。例えば,走行音1KHzでの音圧レベルが50dBであったとすると,判定テーブルB324からは「乾燥」という状態判定結果が得られる。
【0038】
次に,路面状態判定部40は判定結果の正誤を判断する。まず,上記判定結果である路面状態「乾燥」と,路面状態取得部60から取得した実際の路面状態を比較する。ここで,実際の路面状態が「水膜」であったとすると,判定結果は実際の路面状態とは異なっており,誤判定である。これは,タイヤの磨耗やマイクロフォンの機械特性の経年変化等により「高機能舗装」路面での走行音と路面状態との対応関係が変化したことを意味する。
【0039】
そこで,路面状態判定部40は,実際の路面状態「水膜」に則して,判定テーブルB324の走行音1KHzでの音圧レベル50dBに対応する路面状態「乾燥」を「水膜」に変更する。あるいは,判定テーブルのバリエーションを予め用意しておき,走行音1KHzでの音圧レベル50dBに路面状態「水膜」が対応している判定テーブルを検索し,「高機能舗装」用に用いるようにマスタテーブル321の対応関係を変更することもできる。
【0040】
上述のような修正を行うことにより,以後は同じタイヤで「高機能舗装」路面を走行したとしても,道路交通情報から実際の路面状態を取得しなくても,走行音を用いて正確な判定を行うことが可能となる。
【0041】
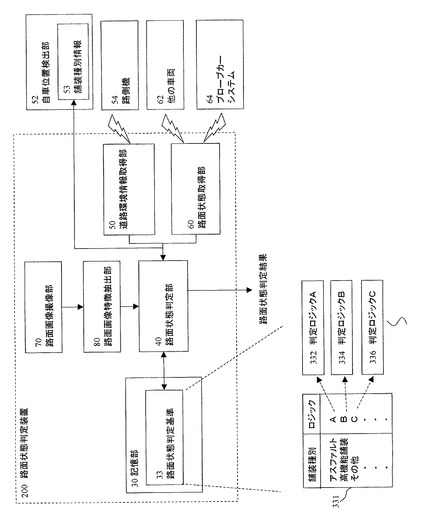
図3は,別の実施例における路面状態判定装置の構成図である。図3では,路面の画像に基づき状態判定を行う路面状態判定装置200を示している。この路面状態判定装置200は,車両の前方の路面を撮像する路面画像撮像部70と,路面画像特徴抽出部80と,路面状態判定基準33を格納した記憶部30と,道路環境情報取得部50と,実際の路面状態の情報を取得する路面状態取得部60と,路面状態を判定する路面状態判定部40とから構成される。各部の機能と動作について,図2で示した路面状態判定装置100と異なる部分について説明する。なお,以下の説明においては,既に説明した構成要素と同じものについては同じ符号を用いる。
【0042】
路面画像撮像部70は,車体のフロント部に装着されたカメラであり,CCD(Charge Coupled Device)などの撮像素子により車両の進行方向前方の路面を撮像し電気信号に変換する。路面画像特徴抽出部80は,路面画像撮像部70から提供される画像信号から,路面画像の特徴量を抽出する。例えば,路面画像の特徴量は色相,彩度,輝度データなど,またはこれらの組み合わせであり,路面の舗装種別と路面状態との組み合わせに応じて異なる値を示すものである。
【0043】
路面状態判定基準33は,路面画像の特徴量に基づき「乾燥」,「冠水」,「水膜」,「積雪」,「凍結」などの路面状態を求める複数の異なる判定ロジックA331,判定ロジックB332,判定ロジックC333,… を格納した画像データ用の路面状態判定基準である。これらの判定ロジックは公知のものでよく,例えば路面画像の特定範囲の色相,彩度,輝度データなどやそれらの組み合わせから,路面状態が一意に求められるものであれば良い。ただし,路面の舗装種別によってこれら特徴量が異なるので,判定ロジックは舗装種別に応じて最も適したものが用いられる。これら判定ロジックはマスタテーブル331において舗装種別と対応付けられている。
【0044】
以上のように構成された路面状態判定装置200は,路面画像に基づいて判定した路面状態を,道路交通情報から得られる実際の路面状態と照らして正誤判断する。すなわち,路面状態判定部40は,上記の路面画像特徴抽出部80により取得された路面画像の特徴量を用いて,自車位置検知部52の舗装種別情報53または道路環境情報取得部50が取得した走行路面の舗装種別に基づき,記憶部30に格納された路面状態判定基準33を参照して走行路面の舗装種別と路面画像に対応した路面状態を判定する。つまり,自車位置検出部52から自車の位置における路面の舗装種別を取得し,その舗装種別に対応した判定ロジックを選択し,その判定ロジックにより路面画像の特徴量から路面状態を求める。
【0045】
そして,路面状態判定部40は,路面状態の判定結果と路面状態取得部60から提供された実際の路面状態とを比較し,判定結果の正誤を判断する。判定結果が実際の路面状態と異なる場合は,位置検出部52の舗装種別情報53もしくは路面状態判定基準33の内容を修正する。
【0046】
修正の手順については,判定テーブルが判定ロジックに置き換わった他は第2図で説明した手順と同じである。すなわち,舗装種別情報53から取得した舗装種別に基づく誤判定の場合は,取得した路面画像に実際の路面状態が対応するような判定ロジックを検出し,その判定ロジックが対応する舗装種別を特定して,舗装種別情報53における自車位置での舗装種別を特定した舗装種別に修正する。
【0047】
あるいは,道路環境情報から得られた舗装種別に基づく誤判定の場合は,カメラの機械特性の経年変化などにより路面画像の特徴量と路面状態との不一致が生じているので,実際の路面状態と合致する判定結果が得られるように,判定に用いたロジックの入出力パラメータを修正するか,舗装種別に対して用いるロジックの対応付けを修正する。
【0048】
以上のように構成された路面状態判定装置200では,路面画像に基づき路面状態を判定する際,走行路面の舗装種別に基づいて路面状態判定基準を選択し,その路面状態判定基準を用いて誤判定を得た場合には,正しい判定結果が得られるように,舗装種別情報や判定ロジックを修正する。よって,以後同じ位置や舗装種別の路面においては,道路交通情報の実際の路面状態を取得しなくても正確な判定結果を得ることができる。
【0049】
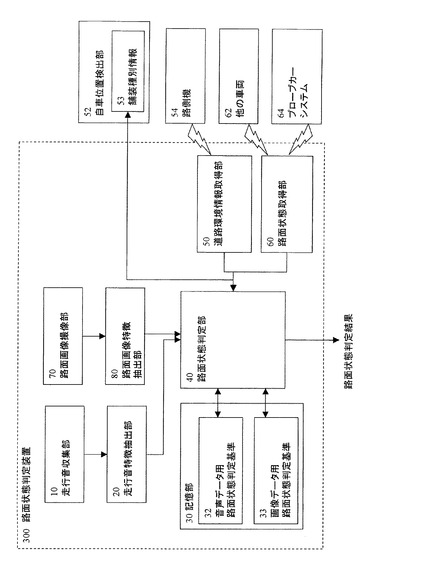
図4は,さらに別の実施例における路面状態判定装置の構成図である。図4では,走行音に基づく判定と路面の画像に基づく判定を併用する路面状態判定装置300を示している。この路面状態判定装置300は,車両のタイヤが走行中に路面との摩擦により発する走行音を収集する走行音収集部10と,走行音特徴抽出部20と,車両の前方の路面を撮像する路面画像撮像部70と,路面画像特徴抽出部80と,音声データ用の路面状態判定基準32,画像データ用の路面状態判定基準33とを格納した記憶部30と,道路環境情報取得部50と,実際の路面状態の情報を取得する路面状態取得部60と,路面状態を判定する路面状態判定部40とから構成される。
【0050】
上記のように構成された路面状態判定装置300において路面状態判定部40は,後述する処理手順に従い,通常時は路面画像特徴抽出部80により取得された路面画像の特徴量を用いて路面状態の判定を行い,天候条件などにより画像による判定精度が低下するような場合には走行音特徴抽出部20により取得された走行音の特徴量を用いて路面状態判定を行って,その路面状態判定結果を操縦安定制御機能などを備えた他の装置へ出力する。路面画像による判定を行う際には,路面状態判定基準33を用い,走行音による判定を行う際には,路面状態判定基準32を用いる。
【0051】
そして,路面状態判定部40は,路面状態の判定結果と路面状態取得部60から提供された実際の路面状態とを比較し,判定結果の正誤を判断する。舗装種別情報53から取得した走行路面の舗装種別に基づいて誤判定が生じた場合は,位置検出部52の舗装種別情報53の内容を修正する。あるいは,道路環境情報から取得した舗装種別に基づき誤判定が生じた場合であって,路面画像による判定を行った場合には,判定に用いた路面状態判定基準33の内容を,走行音による判定を行った場合には,判定に用いた路面状態判定基準32の内容を修正する。判定結果の正誤判断と,それぞれの情報の修正手順は,図1乃至図3で説明したとおりであるので,説明を省略する。
【0052】
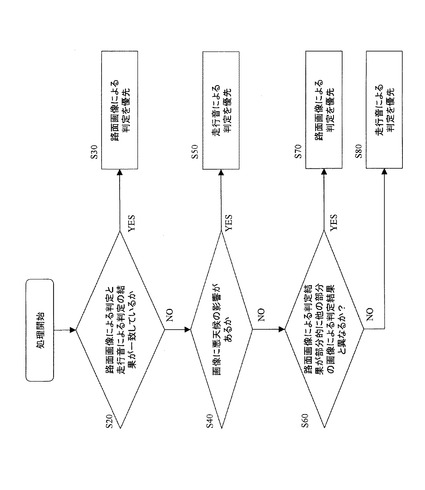
図5は,路面画像または走行音いずれかによる判定を選択する路面状態判定部40の処理手順を説明するフローチャート図である。まず,路面画像による判定と走行音による判定を行い,両者の結果が一致するかを判断する(S20)。一致していれば,同じ判定結果を得るためにはより有益な画像による判定を優先する(S30)。これは,走行音は状態を判定する路面を実際に通過してからでないと収集できず,事後の判定となるのに対し,路面画像は前方の路面を撮像するので,車両の未来位置における判定が可能となるためである。
【0053】
両者の判定結果が一致しない場合には(S20のNO),画像に悪天候の影響があるか,すなわち,降雨や降雪,霧などにより可視度が低いとき撮像した路面画像から有意な特徴量が抽出されるかを,路面画像特徴抽出部80からの出力結果と任意に定めた閾値とを比較して判断する(S40)。この段階で,悪天候の影響がある場合には(S40のYES),走行音による判定を優先する(S50)。
【0054】
悪天候の影響がない場合には(S40のNO), 路面画像の一部による判定結果が路面画像の他の部分による判定結果と異なるかを判断する(S60)。すなわち,先行車両から落下した雪や打ち水によって,画像の一部分では積雪や冠水を示す特徴が抽出され,路面画像のその他の部分からは乾燥路面を示す特徴が抽出されるような場合がある。そのような場合に,落下した雪や打ち水の上を走行して走行音を収集すると,走行音に基づく判定結果が路面全体の実際の状態とは異なってしまう。よって,かかる場合には路面画像による判定を優先し(S70),そうでなければ(S60のNO)走行音による判定を優先する。
【0055】
上述したように,図4に示した路面状態判定装置300は,図5の手順に従い,通常時は進行方向前方の路面画像に基づき未来位置における路面状態の判定を行うので,路面を通過時に収集した走行音に基づく判定より有益な判定結果を得ることができ,悪天候のために画像による判定精度が低い場合は,走行音による路面判定を用い,路面状態判定装置全体としての判定精度を良好に保つことができる。さらに,路面画像に基づく判定または走行音に基づく判定いずれの場合でも,判定結果が実際の路面状態と異なれば実際に則して判定に用いるデータを修正するので,以後正確な判定結果を得ることができる。
【0056】
次に,図1乃至図5で説明した路面状態判定装置100,200,及び300において,路面状態判定部40が,判定により得られた判定結果を出力するか,あるいは,路面状態取得部60が取得した路面状態を判定結果として出力するかを判断する手順について説明する。
【0057】
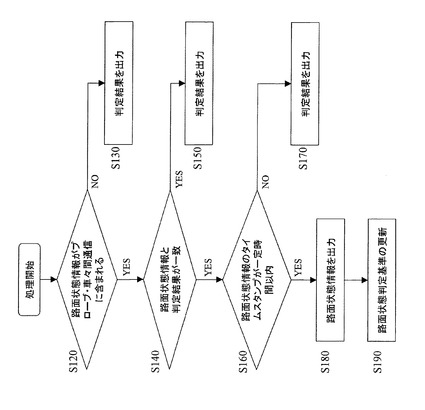
図6は,路面状態判定部40が判定結果を出力する際の判断手順を説明するフローチャート図である。まず,路面状態取得部60がプローブカーシステムや他車両から受信する情報に路面状態情報が含まれるかを判断する(S120)。含まれていなければ(S120のNO),判定された路面状態を判定結果として出力し,含まれていれば(S120のYES),判定結果と取得した路面状態とが一致するかを判断する(S140)。
【0058】
両者が一致していれば(S140のYES),正確な判定がされたものとして,その判定結果を出力する(S150)。一致していなければ(S140のNO),路面状態を取得した道路交通情報のタイムスタンプが一定時間以内であるかを判断する(S160)。一定時間以内でない場合(S160のNO)は,取得した路面状態情報の信頼度が低いのでし,判定結果を優先して出力する(S170)。しかし,一定時間以内であれば,取得した路面状態情報の信頼度が高いので,取得した路面状態を判定結果として出力する(S180)。そして,その路面状態を基準として路面状態判定基準32等の修正を行う(S190)。
【0059】
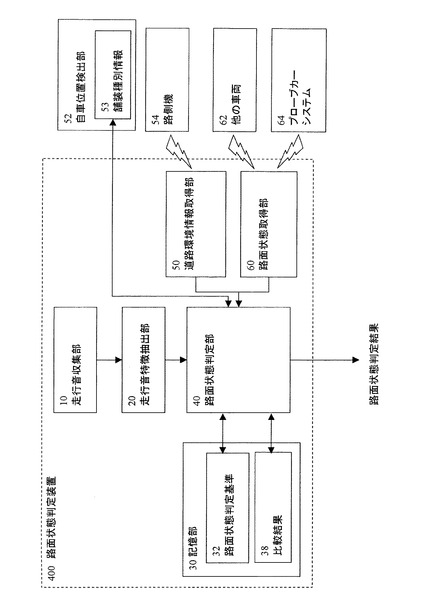
図7は,図1で示した路面状態判定装置100の変形例を説明する図である。図7で示した路面状態判定装置400は,路面状態判定部40が行う判定結果の正誤判断の結果を記憶部30に比較結果38として格納することを特徴とする。
【0060】
この比較結果38には,判定結果が取得した実際の路面状態と異なる不一致率が算出されて格納される。この不一致率が任意に定めた基準値を上回る場合は路面状態判定部40の判定精度が低く,基準値以下の場合は判定精度が高いことを意味する。よって,路面状態取得部60がプローブカーシステムや他車両との通信可能エリアを逸脱するなどの理由によって,路面状態情報を取得していてもその情報が古く信頼性が低い場合などに,この不一致率を参照すれば,出力すべき判定結果をスクリーニングすることができる。
【0061】
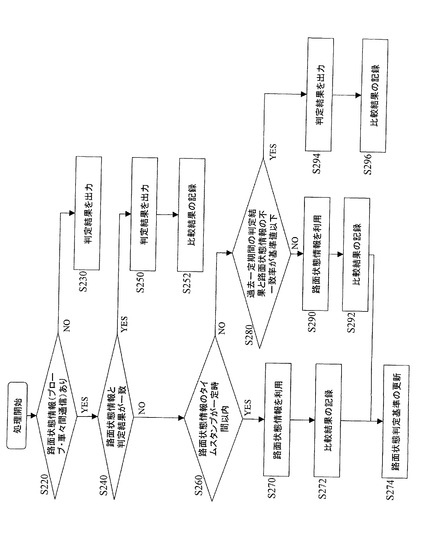
図8は,図7の変形例における路面状態判定部40による判定結果の正誤判断の手順を説明するフローチャート図である。まず,路面状態取得部60がプローブカーシステムや他車両から受信する情報に路面状態情報が含まれるかを判断する(S220)。含まれていなければ(S220のNO),判定された路面状態を判定結果として出力し,含まれていれば(S220のYES),判定結果と取得した路面状態とが一致するかを判断する(S240)。
【0062】
両者が一致していれば(S240のYES),正確な判定がされたものとして判定結果を出力し(S250),比較結果つまり正確な判定がなされたことを記録する(S252)。一致していなければ(S240のNO),路面状態を取得した道路交通情報のタイムスタンプが一定時間以内であるかを判断する(S260)。
【0063】
一定時間以内でない場合(S260のNO)は,取得した路面状態情報の信頼度が低いので,過去一定期間の判定結果と路面状態情報との不一致率が基準値以下であるかを判断する(S280)。基準値以下であれば(S280のYES)判定精度が高いので,その判定結果を出力し(S294),比較結果つまり正確な判定がなされたことを記録する(S296)。すなわち,この場合は,取得した路面状態情報の信頼性より,判定結果の精度が上回ることになる。
【0064】
しかし,基準値を上回っていれば(S280のNO),判定精度が低いので,たとえ古い情報であっても路面状態情報に基づく路面状態を判定結果として出力し(S290),比較結果つまり誤判定が生じたことを記録する(S292)。
【0065】
路面状態を取得した道路交通情報のタイムスタンプが一定時間以内であれば(S260のYES),取得した路面状態情報の信頼度が高いので,取得した路面状態を判定結果として出力する(S270)。そして,比較結果つまり誤判定が生じたことを記録し(S272),その路面状態を基準として路面状態判定基準32等の修正を行う(S274)。
【0066】
以上の手順によれば,得られた路面状態情報が古い場合などに,過去の不一致率を参照すれば,判定結果と路面状態情報のより信頼性の高い方を選択して出力,またはその結果に即してデータを修正することができる。
【0067】
更に,別の変形例として,図1及び図2で説明した走行音に基づく判定を行う路面判定装置100において,路面状態判定基準32に与えるパラメータとして,タイヤの種別情報を用いてもよい。その場合,舗装種別に応じて判定テーブルを選択し,選択した判定テーブルはタイヤ種別と走行音に対し路面状態を対応づけた構造のテーブルとなる。なお,タイヤ種別は,タイヤに付加されるICタグからタイヤ種別を取得するタイヤ種別取得部を更に設けることにより取得する。
【0068】
このような路面状態判定装置によれば,タイヤのトレッドパターンや,スタッドレスなどの種別に応じて走行音が異なる場合であっても,より正確な判定を行うことができる。
【0069】
以上の説明において,走行音に基づく判定の基となる走行音の特徴量や,特徴量と路面状態との対応関係は上述したものに限られない。舗装種別やタイヤの種別ごとに走行音から路面状態が導かれる関係が成り立てばよく,例えば複数の周波数域における音圧分布や,音圧レベルの変化曲線などを用いて路面状態を求めても良い。
【0070】
また,路面画像に基づく判定の基となる路面画像の特徴量や判定ロジックも上述したものに限られない。例えば,反射率バンプマップや赤外温度分布映像などを用いて路面状態を判定するものでも良い。
【0071】
以上説明したとおり,本実施の形態における路面状態判定装置によれば,実際の路面状態と異なる判定結果を得た場合には,路面状態判定基準選択の基となる舗装種別情報や路面状態判定基準を修正することにより,以後の路面状態判定においては,道路交通情報による路面状態を取得しなくても正しい判定結果を得ることができる。
【図面の簡単な説明】
【0072】
【図1】本実施の形態における路面状態判定装置の構成図である。
【図2】舗装種別情報53と路面状態判定基準32のデータ構造の一例を説明する図である。
【図3】別の実施例における路面状態判定装置の構成図である。
【図4】さらに別の実施例における路面状態判定装置の構成図である。
【図5】路面画像または走行音いずれかによる判定を選択する路面状態判定部40の処理手順を説明するフローチャート図である。
【図6】路面状態判定部40が判定結果を出力する際の判断手順を説明するフローチャート図である。
【図7】図1で示した路面状態判定装置100の変形例を説明する図である。
【図8】図7の変形例における路面状態判定部40による判定結果の正誤判断の手順を説明するフローチャート図である。
【符号の説明】
【0073】
10: 走行音収集部 20: 走行音特徴抽出部
32: 路面状態判定基準 40: 路面状態判定部
50: 道路環境情報取得部 60: 路面状態取得部
【技術分野】
【0001】
本発明は,走行路面の路面状態を判定する路面状態判定装置及び路面状態判定方法に関し,特に,走行音等の特徴に基づく路面状態の判定結果が外部から取得した路面状態情報と異なる場合は,判定に用いる情報を修正する路面状態判定装置及び路面状態判定方法に関する。
【背景技術】
【0002】
車両の操縦安定制御に寄与するために,車両が走行する路面の路面状態,つまり,乾燥路面か,冠水路面か,あるいは積雪や凍結の有無などを判定する路面状態判定方法が種々提案されている。
【0003】
例えば,車両のタイヤが路面との摩擦により発する走行音から特徴量を抽出し,その特徴量に基づき路面状態を判定する方法が特許文献1及び2に記載されている。さらに,車両前方の路面を撮像し,撮像した画像から抽出した特徴量を所定の基準値と比較することにより路面状態を判定する方法が,特許文献3及び4に記載されている。
【特許文献1】特開平8−261993号公報
【特許文献2】特開平8−298613号公報
【特許文献3】特開平9−14957号公報
【特許文献4】特開2002−310896号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら,従来の技術では,次のような問題点がある。すなわち,従来の路面状態判定方法は,予め走行音や路面画像の特徴量に路面状態を対応付けた参照用データを用意しておき,そのデータと観測された走行音や路面画像の特徴量とを比較して観測結果に対応する路面状態を求め判定結果とする。よって,道路環境の変化等により当初の参照用データが適用できない状況では,誤判定が生じてしまう。
【0005】
例えば,路面の舗装が変更された場合,変更の前後では走行音や路面の色などが異なる。また,同じ舗装種別の路面でも,経年劣化により走行音や路面の色が変化する。さらに,車両のタイヤも磨耗するので,走行音が経年変化する。こうした状況では,路面状態判定の基になる走行音や路面画像の特徴が変化したため従前の参照用データと不一致が生じており,従前の参照用データを判定基準として適用できなくなる。
【0006】
そこで,本発明の目的は,従前の判定基準が適用できなくなった場合でも,誤判定を回避するような路面状態判定装置及び路面状態判定方法を提供することにある。
【課題を解決するための手段】
【0007】
上記の目的を達成するために,本発明の第1の側面によれば,車両に搭載され,走行路面の路面状態を判定する路面状態判定装置において,タイヤから発する走行音を取得する走行音取得部と,路面の舗装種別ごとに走行音と路面状態を対応付けた路面状態判定基準を格納した記憶部と,路面の舗装種別を有する地図情報を記憶し,自車位置と前記地図情報に基づいて,前記走行路面の舗装種別を検出する舗装種別検出部と,前記路面状態判定基準に基づき,検出された舗装種別と前記取得された走行音とに対応する当該走行路面の路面状態を判定する路面状態判定部と,当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部とを有する。そして,前記路面状態判定部は,前記判定された路面状態と前記取得された路面状態が異なる場合には,当該走行路面の舗装種別が,前記路面状態判定基準において当該走行音と当該取得された路面状態により特定される舗装種別となるように,前記舗装種別検出部の記憶内容を変更することを特徴とする。
【0008】
上記第1の側面における路面状態判定装置によれば,実際の路面状態と異なる路面状態の判定結果を得た場合には,路面状態判定基準を選択するキーとなる舗装種別を,正しい判定結果が得られる路面状態判定基準を選択するような舗装種別情に修正する。よって,以後同じ位置の路面において正確な判定結果を得ることができる。
【0009】
本発明の第2の側面における路面状態判定装置は,タイヤから発する走行音を取得する走行音取得部と,路面の舗装種別ごとに走行音と路面状態とを対応付けた路面状態判定基準を格納した記憶部と,路側に設置された路側機から路面の舗装種別を含む道路環境情報を受信し,前記走行路面の舗装種別を取得する舗装種別取得部と,前記路面状態判定基準に基づき,前記取得された舗装種別と前記取得された走行音とに対応する当該走行路面の路面状態を判定する路面状態判定部と,当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部とを有し,前記路面状態判定部は,前記判定された路面状態が前記取得された路面状態と異なる場合には,前記路面状態判定基準において当該走行音に対応する路面状態が当該取得された路面状態となるように,前記記憶部の記憶内容を変更することを特徴とする。
【0010】
上記第2の側面における路面状態判定装置によれば,道路環境情報からリアルタイムに得られ信頼性の高い舗装種別情報に基づいて,路面状態判定基準に格納されている走行音に実際の路面状態が対応するように路面状態判定基準を修正する。よって,以後同じ舗装種別の路面状態判定において正しい判定結果を得ることができる。
【0011】
本発明の第3の側面における路面状態判定装置は,タイヤから発する走行音を取得する走行音取得部と,走行路面前方の画像を撮像する路面画像取得部と,路面の舗装種別ごとに走行音と路面状態を対応付けた音声用路面状態判定基準と,路面の舗装種別ごとに路面画像と路面状態を対応付けた画像用路面状態判定基準とを格納した記憶部と,路面の舗装種別を有する地図情報を記憶し,自車位置と前記地図情報に基づいて,前記走行路面の舗装種別を検出する舗装種別検出部と,前記音声用路面状態判定基準に基づき,前記検出された舗装種別と前記取得された走行音に対応する当該走行路面の第1の路面状態を判定し,前記画像用路面状態判定基準に基づき,前記検出された舗装種別と前記取得された路面画像に対応する当該走行路面の第2の路面状態とを判定する路面状態判定部とを有する,そして,前記路面状態判定部は,前記第1の路面状態と第2の路面状態とが同じ場合は,当該路面状態を他の装置に出力し,前記第1の路面状態と第2の路面状態とが異なり,且つ前記取得した路面画像が所定の条件を満たさない場合は,前記第1の路面状態を他の装置に出力し,前記第1の路面状態と第2の路面状態とが異なり,且つ前記取得した路面画像が前記所定の条件を満たす場合は,前記第2の路面状態を他の装置に出力することを特徴とする。
【0012】
上記第3の側面における路面状態判定装置によれば,通常時は,進行方向前方の路面画像に基づき未来位置における路面状態の判定を行うので,路面を通過時に収集した走行音に基づく判定より有益な判定結果を得ることができる。また,降雨・降雪,霧などの悪天候のために画像による判定精度が低い場合は,走行音による路面判定を用い,路面状態判定装置全体としての判定精度を良好に保つことができる。
【発明の効果】
【0013】
本発明における路面状態判定装置によれば,舗装種別に基づく判定結果が道路交通情報などから取得した実際の路面状態と異なる場合には,その位置における路面の舗装種別や路面状態判定基準を修正するので,以後同じ位置や舗装種別においては正確な判定結果を得ることができる。さらに,路面画像による路面状態判定と走行音による路面状態判定を併用し,天候などの条件に応じて精度の高い判定が可能な方を優先して用いるので,路面状態判定装置全体としての判定精度を良好に保つことができる。
【発明を実施するための最良の形態】
【0014】
以下,図面にしたがって本発明の実施の形態について説明する。但し,本発明の技術的範囲はこれらの実施の形態に限定されず,特許請求の範囲に記載された事項とその均等物まで及ぶものである。
【0015】
図1は,本実施の形態における路面状態判定装置の構成図である。図1は走行音に基づき走行路面の路面状態判定を行う路面状態判定装置100を示している。
【0016】
この路面状態判定装置100は,車両のタイヤが走行中に路面との摩擦により発する走行音を収集する走行音収集部10と,走行音特徴抽出部20と,路面状態判定基準32を格納した記憶部30と,道路環境情報を取得する道路環境情報取得部50と,実際の路面状態の情報を取得する路面状態取得部60と,路面状態を判定する路面状態判定部40とから構成される。更に,路面状態判定装置100は,自車に搭載された自車位置検出部52,車外の路側機54,他の車両62,プローブカーシステム64などから種々の情報を取得し,路面結果の判定に用いる。各部の機能及び動作は次のとおりである。
【0017】
走行音収集部10は車両のタイヤ近傍に設置されるマイクロフォンであり,タイヤが発する走行音を収集して電気信号に変換する。そして走行音特徴抽出部20は,走行音収集部10が出力する音声信号に基づき,周波数解析を行って走行音の特徴量を抽出する。例えば,走行音の特徴量は所定の周波数域の音圧レベルであり,路面の舗装種別と乾燥や冠水などの路面状態との組み合わせに応じて異なる値を示すものである。これら走行音収集部10と走行音特徴抽出部20とで,走行音取得部に対応する。
【0018】
記憶部30は,書き換え可能な不揮発性記憶装置であり,路面状態判定基準32を記憶している。路面状態判定基準32は,路面の舗装種別に応じて選択される複数の判定テーブルを有しており,各テーブルには走行音の特徴量と対応付けられた路面状態が記憶されている音声データ用の路面状態判定基準である。
【0019】
自車位置検出部52は,GPS衛星からの信号を受信することにより自車の位置を検出するカーナビゲーション装置であり,地図情報と共に路面の舗装種別情報53を有している。よって,自車位置検出部52からは,自車の位置における路面の舗装種別を取得することができ,自車位置検出部52は舗装種別検出部に対応する。
【0020】
道路環境情報取得部50は,路側に設置された電波ビーコンや光ビーコンなどの路側機54から道路環境情報を受信する機能を有している。道路環境情報は,財団法人日本道路交通情報センターがVICS(Vehicle Information and Communication System)で提供する,道路の種別・位置,道路の渋滞・規制,区間の旅行時間などの情報である。この道路環境情報に路面の舗装種別が付加されることによって,走行中の路面の舗装種別をリアルタイムに取得することができる。よって,道路環境情報取得部50は舗装種別取得部に対応する。
【0021】
路面状態取得部60は,他の車両62やプローブカーシステム64といった車外の情報源との無線通信を行う。車車間通信やプローブカーシステムは自動車を移動体の観測装置とした双方向の情報インフラであり,これらのシステムからは各自動車から収集した渋滞情報,天候情報などの道路交通情報を取得できる。よって,このような道路交通情報に走行路面の路面状態が付加されることによって,路面状態取得部60は実際の走行路面状態を取得することができる。
【0022】
路面状態判定部40は,制御プログラムとマイクロプロセッサにより構成され,自車位置検出部52もしくは道路環境情報取得部50から取得した走行路面の舗装種別と,走行音抽出部20が抽出した走行音の特徴量に基づき,記憶部30に格納された路面状態判定基準32を参照して舗装種別と走行音特徴に対応した路面状態を判定する。具体的には,まず走行路面の舗装種別に適した判定テーブルを選択し,その判定テーブルにおいて走行音の所定周波数における音圧レベルに対応する路面状態を求め判定結果とする。
【0023】
そして,路面状態の判定結果と路面状態取得部60から提供される実際の路面状態とを比較し,後述する手順に従い判定結果の正誤を判断して,より信頼性の高い路面状態判定結果をドライバへの通知機能や操縦安定制御機能などを備えた他の装置へ出力する。更に,判定結果が実際の路面状態と異なる場合は,自車位置検出部52の舗装種別情報53もしくは路面状態判定基準32の内容を次のように修正する。
【0024】
まず,舗装種別情報53の舗装種別に応じて路面状態判定基準32を選択し,その路面状態判定基準を用いて実際の路面状態と異なる判定結果を得た場合には,路面状態判定基準選択の基となる舗装種別情報が不適切であるので,正しい判定結果が得られる路面状態判定基準を選択するようにその位置における路面の舗装種別情報を修正する。
【0025】
また,前記道路環境情報から取得した走行路面の舗装種別に基づいて路面状態判定基準を選択し,その路面状態判定基準を用いて実際の路面状態と異なる判定結果を得た場合には,自車のタイヤの磨耗等に起因して走行音が変化した場合に該当するので,正しい判定結果が得られるように路面状態判定基準32の内容を修正する。
【0026】
次に,上述した路面状態判定装置100により路面状態の判定に用いられ,判定結果に基づいて修正されるデータについて図2を用いて説明する。
【0027】
図2は,舗装種別情報53と路面状態判定基準32のデータ構造の一例を説明する図である。まず,舗装種別情報53には,位置情報と舗装種別が対応付けて格納されている。位置情報としては,VICSで規格化された位置情報であるVICSリンクを用いる。また,緯度経度などを用いることも可能である。
【0028】
それぞれのVICSリンクに対しては,路面の舗装種別,例えば「アスファルト」,「高機能舗装」,「コンクリート」…等を対応づけてある。さらに,同じ舗装種別でも舗装されてからの経過時間により「2年未満」,「3年以上5年未満」,「5年以上」などとランク分けすることもできる。
【0029】
次に,路面状態判定基準32について説明する。路面状態判定基準32には,走行音の所定周波数の音圧レベルに,「乾燥」,「冠水」,「水膜」,「積雪」,「凍結」などの路面状態が対応付けられた判定テーブルA322,判定テーブルB324,判定テーブルC326…が格納されている。
【0030】
これらの判定テーブルでは,テーブルごとに走行音の特徴量と路面状態との対応関係が異なっている。例えば,判定テーブルA322において1KHzの周波数での音圧レベル50dBには「冠水」という結果が対応しているが,判定テーブルB324においては1KHzでの50dBには「乾燥」が対応している。よって,路面の舗装種別に適合した対応関係を有する判定テーブルが,舗装種別に応じて選択される。
【0031】
なお,これら判定テーブルと舗装種別との関係はマスタテーブル321に収められている。例えば,「アスファルト」舗装の路面での状態判定には判定テーブルA322,「高機能舗装」には判定テーブルB324を用いる。
【0032】
路面状態判定部40は,上述のような舗装種別情報53と路面状態判定基準32とを用いて次のように路面状態を判定する。まず,自車位置検出部52が検出した自車位置の位置情報に基づき,例えば位置情報が「VICSLINK_1」である路面の舗装種別「アスファルト」を取得する。次に,路面状態判定基準32のマスタテーブル321を参照して舗装種別「アスファルト」に対応する判定テーブルA322を選択する。
【0033】
また,走行音特徴抽出部20が抽出した特徴量が,例えば周波数1KHzでの音圧レベル50dBであったとする。すると,路面状態判定部40は,判定テーブルA322において,この走行音の特徴量に対応する路面状態「冠水」を得る。
【0034】
すると,路面状態判定部40は判定結果の正誤を判断を行う。まず,上記判定結果である路面状態「冠水」と,路面状態取得部60から取得した実際の路面状態を比較する。ここで,実際の路面状態が「乾燥」であったとすると,判定結果は実際の路面状態とは異なっており,誤判定である。これは舗装別情報53の情報が古くなっており,実際の路面の舗装種別と異なっていることを意味する。
【0035】
そこで,路面状態判定部40は,走行音の周波数1KHzでの音圧レベル50dBに路面状態「乾燥」が対応している判定テーブルを検索し,判定テーブルB324を抽出する。すると,マスタテーブル321において,判定テーブルBは「高機能舗装」用の判定テーブルであることが検出できるので,舗装種別情報53の,位置情報「VICS_LINK1」における舗装種別「アスファルト」を「高機能舗装」に変更する。
【0036】
上述のような修正を行うことにより,以後は位置情報「VICS_LINK1」における走行路面の路面状態判定には,道路交通情報から実際の路面状態を取得しなくても,「高機能舗装」用の判定テーブルB324を用いて正確な判定を行うことが可能となる。
【0037】
次に,路面状態判定部40が,道路環境情報から取得したよりリアルタイムで信頼性の高い走行路面の舗装種別に基づいて判定を行った場合について説明する。まず,道路環境情報取得部50は,電波ビーコンなどの路側機54から,道路環境情報を受信し,走行路面の舗装種別として,例えば「高機能舗装」を取得する。そして,路面状態判定部40はこの情報を受け取り,路面状態判定基準32において,「高機能舗装」の路面状態を判定テーブルB324を用いて走行音に対応する路面状態を判定する。例えば,走行音1KHzでの音圧レベルが50dBであったとすると,判定テーブルB324からは「乾燥」という状態判定結果が得られる。
【0038】
次に,路面状態判定部40は判定結果の正誤を判断する。まず,上記判定結果である路面状態「乾燥」と,路面状態取得部60から取得した実際の路面状態を比較する。ここで,実際の路面状態が「水膜」であったとすると,判定結果は実際の路面状態とは異なっており,誤判定である。これは,タイヤの磨耗やマイクロフォンの機械特性の経年変化等により「高機能舗装」路面での走行音と路面状態との対応関係が変化したことを意味する。
【0039】
そこで,路面状態判定部40は,実際の路面状態「水膜」に則して,判定テーブルB324の走行音1KHzでの音圧レベル50dBに対応する路面状態「乾燥」を「水膜」に変更する。あるいは,判定テーブルのバリエーションを予め用意しておき,走行音1KHzでの音圧レベル50dBに路面状態「水膜」が対応している判定テーブルを検索し,「高機能舗装」用に用いるようにマスタテーブル321の対応関係を変更することもできる。
【0040】
上述のような修正を行うことにより,以後は同じタイヤで「高機能舗装」路面を走行したとしても,道路交通情報から実際の路面状態を取得しなくても,走行音を用いて正確な判定を行うことが可能となる。
【0041】
図3は,別の実施例における路面状態判定装置の構成図である。図3では,路面の画像に基づき状態判定を行う路面状態判定装置200を示している。この路面状態判定装置200は,車両の前方の路面を撮像する路面画像撮像部70と,路面画像特徴抽出部80と,路面状態判定基準33を格納した記憶部30と,道路環境情報取得部50と,実際の路面状態の情報を取得する路面状態取得部60と,路面状態を判定する路面状態判定部40とから構成される。各部の機能と動作について,図2で示した路面状態判定装置100と異なる部分について説明する。なお,以下の説明においては,既に説明した構成要素と同じものについては同じ符号を用いる。
【0042】
路面画像撮像部70は,車体のフロント部に装着されたカメラであり,CCD(Charge Coupled Device)などの撮像素子により車両の進行方向前方の路面を撮像し電気信号に変換する。路面画像特徴抽出部80は,路面画像撮像部70から提供される画像信号から,路面画像の特徴量を抽出する。例えば,路面画像の特徴量は色相,彩度,輝度データなど,またはこれらの組み合わせであり,路面の舗装種別と路面状態との組み合わせに応じて異なる値を示すものである。
【0043】
路面状態判定基準33は,路面画像の特徴量に基づき「乾燥」,「冠水」,「水膜」,「積雪」,「凍結」などの路面状態を求める複数の異なる判定ロジックA331,判定ロジックB332,判定ロジックC333,… を格納した画像データ用の路面状態判定基準である。これらの判定ロジックは公知のものでよく,例えば路面画像の特定範囲の色相,彩度,輝度データなどやそれらの組み合わせから,路面状態が一意に求められるものであれば良い。ただし,路面の舗装種別によってこれら特徴量が異なるので,判定ロジックは舗装種別に応じて最も適したものが用いられる。これら判定ロジックはマスタテーブル331において舗装種別と対応付けられている。
【0044】
以上のように構成された路面状態判定装置200は,路面画像に基づいて判定した路面状態を,道路交通情報から得られる実際の路面状態と照らして正誤判断する。すなわち,路面状態判定部40は,上記の路面画像特徴抽出部80により取得された路面画像の特徴量を用いて,自車位置検知部52の舗装種別情報53または道路環境情報取得部50が取得した走行路面の舗装種別に基づき,記憶部30に格納された路面状態判定基準33を参照して走行路面の舗装種別と路面画像に対応した路面状態を判定する。つまり,自車位置検出部52から自車の位置における路面の舗装種別を取得し,その舗装種別に対応した判定ロジックを選択し,その判定ロジックにより路面画像の特徴量から路面状態を求める。
【0045】
そして,路面状態判定部40は,路面状態の判定結果と路面状態取得部60から提供された実際の路面状態とを比較し,判定結果の正誤を判断する。判定結果が実際の路面状態と異なる場合は,位置検出部52の舗装種別情報53もしくは路面状態判定基準33の内容を修正する。
【0046】
修正の手順については,判定テーブルが判定ロジックに置き換わった他は第2図で説明した手順と同じである。すなわち,舗装種別情報53から取得した舗装種別に基づく誤判定の場合は,取得した路面画像に実際の路面状態が対応するような判定ロジックを検出し,その判定ロジックが対応する舗装種別を特定して,舗装種別情報53における自車位置での舗装種別を特定した舗装種別に修正する。
【0047】
あるいは,道路環境情報から得られた舗装種別に基づく誤判定の場合は,カメラの機械特性の経年変化などにより路面画像の特徴量と路面状態との不一致が生じているので,実際の路面状態と合致する判定結果が得られるように,判定に用いたロジックの入出力パラメータを修正するか,舗装種別に対して用いるロジックの対応付けを修正する。
【0048】
以上のように構成された路面状態判定装置200では,路面画像に基づき路面状態を判定する際,走行路面の舗装種別に基づいて路面状態判定基準を選択し,その路面状態判定基準を用いて誤判定を得た場合には,正しい判定結果が得られるように,舗装種別情報や判定ロジックを修正する。よって,以後同じ位置や舗装種別の路面においては,道路交通情報の実際の路面状態を取得しなくても正確な判定結果を得ることができる。
【0049】
図4は,さらに別の実施例における路面状態判定装置の構成図である。図4では,走行音に基づく判定と路面の画像に基づく判定を併用する路面状態判定装置300を示している。この路面状態判定装置300は,車両のタイヤが走行中に路面との摩擦により発する走行音を収集する走行音収集部10と,走行音特徴抽出部20と,車両の前方の路面を撮像する路面画像撮像部70と,路面画像特徴抽出部80と,音声データ用の路面状態判定基準32,画像データ用の路面状態判定基準33とを格納した記憶部30と,道路環境情報取得部50と,実際の路面状態の情報を取得する路面状態取得部60と,路面状態を判定する路面状態判定部40とから構成される。
【0050】
上記のように構成された路面状態判定装置300において路面状態判定部40は,後述する処理手順に従い,通常時は路面画像特徴抽出部80により取得された路面画像の特徴量を用いて路面状態の判定を行い,天候条件などにより画像による判定精度が低下するような場合には走行音特徴抽出部20により取得された走行音の特徴量を用いて路面状態判定を行って,その路面状態判定結果を操縦安定制御機能などを備えた他の装置へ出力する。路面画像による判定を行う際には,路面状態判定基準33を用い,走行音による判定を行う際には,路面状態判定基準32を用いる。
【0051】
そして,路面状態判定部40は,路面状態の判定結果と路面状態取得部60から提供された実際の路面状態とを比較し,判定結果の正誤を判断する。舗装種別情報53から取得した走行路面の舗装種別に基づいて誤判定が生じた場合は,位置検出部52の舗装種別情報53の内容を修正する。あるいは,道路環境情報から取得した舗装種別に基づき誤判定が生じた場合であって,路面画像による判定を行った場合には,判定に用いた路面状態判定基準33の内容を,走行音による判定を行った場合には,判定に用いた路面状態判定基準32の内容を修正する。判定結果の正誤判断と,それぞれの情報の修正手順は,図1乃至図3で説明したとおりであるので,説明を省略する。
【0052】
図5は,路面画像または走行音いずれかによる判定を選択する路面状態判定部40の処理手順を説明するフローチャート図である。まず,路面画像による判定と走行音による判定を行い,両者の結果が一致するかを判断する(S20)。一致していれば,同じ判定結果を得るためにはより有益な画像による判定を優先する(S30)。これは,走行音は状態を判定する路面を実際に通過してからでないと収集できず,事後の判定となるのに対し,路面画像は前方の路面を撮像するので,車両の未来位置における判定が可能となるためである。
【0053】
両者の判定結果が一致しない場合には(S20のNO),画像に悪天候の影響があるか,すなわち,降雨や降雪,霧などにより可視度が低いとき撮像した路面画像から有意な特徴量が抽出されるかを,路面画像特徴抽出部80からの出力結果と任意に定めた閾値とを比較して判断する(S40)。この段階で,悪天候の影響がある場合には(S40のYES),走行音による判定を優先する(S50)。
【0054】
悪天候の影響がない場合には(S40のNO), 路面画像の一部による判定結果が路面画像の他の部分による判定結果と異なるかを判断する(S60)。すなわち,先行車両から落下した雪や打ち水によって,画像の一部分では積雪や冠水を示す特徴が抽出され,路面画像のその他の部分からは乾燥路面を示す特徴が抽出されるような場合がある。そのような場合に,落下した雪や打ち水の上を走行して走行音を収集すると,走行音に基づく判定結果が路面全体の実際の状態とは異なってしまう。よって,かかる場合には路面画像による判定を優先し(S70),そうでなければ(S60のNO)走行音による判定を優先する。
【0055】
上述したように,図4に示した路面状態判定装置300は,図5の手順に従い,通常時は進行方向前方の路面画像に基づき未来位置における路面状態の判定を行うので,路面を通過時に収集した走行音に基づく判定より有益な判定結果を得ることができ,悪天候のために画像による判定精度が低い場合は,走行音による路面判定を用い,路面状態判定装置全体としての判定精度を良好に保つことができる。さらに,路面画像に基づく判定または走行音に基づく判定いずれの場合でも,判定結果が実際の路面状態と異なれば実際に則して判定に用いるデータを修正するので,以後正確な判定結果を得ることができる。
【0056】
次に,図1乃至図5で説明した路面状態判定装置100,200,及び300において,路面状態判定部40が,判定により得られた判定結果を出力するか,あるいは,路面状態取得部60が取得した路面状態を判定結果として出力するかを判断する手順について説明する。
【0057】
図6は,路面状態判定部40が判定結果を出力する際の判断手順を説明するフローチャート図である。まず,路面状態取得部60がプローブカーシステムや他車両から受信する情報に路面状態情報が含まれるかを判断する(S120)。含まれていなければ(S120のNO),判定された路面状態を判定結果として出力し,含まれていれば(S120のYES),判定結果と取得した路面状態とが一致するかを判断する(S140)。
【0058】
両者が一致していれば(S140のYES),正確な判定がされたものとして,その判定結果を出力する(S150)。一致していなければ(S140のNO),路面状態を取得した道路交通情報のタイムスタンプが一定時間以内であるかを判断する(S160)。一定時間以内でない場合(S160のNO)は,取得した路面状態情報の信頼度が低いのでし,判定結果を優先して出力する(S170)。しかし,一定時間以内であれば,取得した路面状態情報の信頼度が高いので,取得した路面状態を判定結果として出力する(S180)。そして,その路面状態を基準として路面状態判定基準32等の修正を行う(S190)。
【0059】
図7は,図1で示した路面状態判定装置100の変形例を説明する図である。図7で示した路面状態判定装置400は,路面状態判定部40が行う判定結果の正誤判断の結果を記憶部30に比較結果38として格納することを特徴とする。
【0060】
この比較結果38には,判定結果が取得した実際の路面状態と異なる不一致率が算出されて格納される。この不一致率が任意に定めた基準値を上回る場合は路面状態判定部40の判定精度が低く,基準値以下の場合は判定精度が高いことを意味する。よって,路面状態取得部60がプローブカーシステムや他車両との通信可能エリアを逸脱するなどの理由によって,路面状態情報を取得していてもその情報が古く信頼性が低い場合などに,この不一致率を参照すれば,出力すべき判定結果をスクリーニングすることができる。
【0061】
図8は,図7の変形例における路面状態判定部40による判定結果の正誤判断の手順を説明するフローチャート図である。まず,路面状態取得部60がプローブカーシステムや他車両から受信する情報に路面状態情報が含まれるかを判断する(S220)。含まれていなければ(S220のNO),判定された路面状態を判定結果として出力し,含まれていれば(S220のYES),判定結果と取得した路面状態とが一致するかを判断する(S240)。
【0062】
両者が一致していれば(S240のYES),正確な判定がされたものとして判定結果を出力し(S250),比較結果つまり正確な判定がなされたことを記録する(S252)。一致していなければ(S240のNO),路面状態を取得した道路交通情報のタイムスタンプが一定時間以内であるかを判断する(S260)。
【0063】
一定時間以内でない場合(S260のNO)は,取得した路面状態情報の信頼度が低いので,過去一定期間の判定結果と路面状態情報との不一致率が基準値以下であるかを判断する(S280)。基準値以下であれば(S280のYES)判定精度が高いので,その判定結果を出力し(S294),比較結果つまり正確な判定がなされたことを記録する(S296)。すなわち,この場合は,取得した路面状態情報の信頼性より,判定結果の精度が上回ることになる。
【0064】
しかし,基準値を上回っていれば(S280のNO),判定精度が低いので,たとえ古い情報であっても路面状態情報に基づく路面状態を判定結果として出力し(S290),比較結果つまり誤判定が生じたことを記録する(S292)。
【0065】
路面状態を取得した道路交通情報のタイムスタンプが一定時間以内であれば(S260のYES),取得した路面状態情報の信頼度が高いので,取得した路面状態を判定結果として出力する(S270)。そして,比較結果つまり誤判定が生じたことを記録し(S272),その路面状態を基準として路面状態判定基準32等の修正を行う(S274)。
【0066】
以上の手順によれば,得られた路面状態情報が古い場合などに,過去の不一致率を参照すれば,判定結果と路面状態情報のより信頼性の高い方を選択して出力,またはその結果に即してデータを修正することができる。
【0067】
更に,別の変形例として,図1及び図2で説明した走行音に基づく判定を行う路面判定装置100において,路面状態判定基準32に与えるパラメータとして,タイヤの種別情報を用いてもよい。その場合,舗装種別に応じて判定テーブルを選択し,選択した判定テーブルはタイヤ種別と走行音に対し路面状態を対応づけた構造のテーブルとなる。なお,タイヤ種別は,タイヤに付加されるICタグからタイヤ種別を取得するタイヤ種別取得部を更に設けることにより取得する。
【0068】
このような路面状態判定装置によれば,タイヤのトレッドパターンや,スタッドレスなどの種別に応じて走行音が異なる場合であっても,より正確な判定を行うことができる。
【0069】
以上の説明において,走行音に基づく判定の基となる走行音の特徴量や,特徴量と路面状態との対応関係は上述したものに限られない。舗装種別やタイヤの種別ごとに走行音から路面状態が導かれる関係が成り立てばよく,例えば複数の周波数域における音圧分布や,音圧レベルの変化曲線などを用いて路面状態を求めても良い。
【0070】
また,路面画像に基づく判定の基となる路面画像の特徴量や判定ロジックも上述したものに限られない。例えば,反射率バンプマップや赤外温度分布映像などを用いて路面状態を判定するものでも良い。
【0071】
以上説明したとおり,本実施の形態における路面状態判定装置によれば,実際の路面状態と異なる判定結果を得た場合には,路面状態判定基準選択の基となる舗装種別情報や路面状態判定基準を修正することにより,以後の路面状態判定においては,道路交通情報による路面状態を取得しなくても正しい判定結果を得ることができる。
【図面の簡単な説明】
【0072】
【図1】本実施の形態における路面状態判定装置の構成図である。
【図2】舗装種別情報53と路面状態判定基準32のデータ構造の一例を説明する図である。
【図3】別の実施例における路面状態判定装置の構成図である。
【図4】さらに別の実施例における路面状態判定装置の構成図である。
【図5】路面画像または走行音いずれかによる判定を選択する路面状態判定部40の処理手順を説明するフローチャート図である。
【図6】路面状態判定部40が判定結果を出力する際の判断手順を説明するフローチャート図である。
【図7】図1で示した路面状態判定装置100の変形例を説明する図である。
【図8】図7の変形例における路面状態判定部40による判定結果の正誤判断の手順を説明するフローチャート図である。
【符号の説明】
【0073】
10: 走行音収集部 20: 走行音特徴抽出部
32: 路面状態判定基準 40: 路面状態判定部
50: 道路環境情報取得部 60: 路面状態取得部
【特許請求の範囲】
【請求項1】
車両に搭載され,走行路面の路面状態を判定する路面状態判定装置において,
タイヤから発する走行音を取得する走行音取得部と,
路面の舗装種別ごとに走行音と路面状態とを対応付けた路面状態判定基準を格納した記憶部と,
路面の舗装種別を有する地図情報を記憶し,自車位置と前記地図情報に基づいて,前記走行路面の舗装種別を検出する舗装種別検出部と,
前記路面状態判定基準に基づき,前記検出された舗装種別と前記取得された走行音とに対応する当該走行路面の路面状態を判定する路面状態判定部と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部とを有し,
前記路面状態判定部は,前記判定された路面状態と前記取得された路面状態が異なる場合には,当該走行路面の舗装種別が,前記路面状態判定基準において当該走行音と当該取得された路面状態により特定される舗装種別となるように,前記舗装種別検出部の記憶内容を変更することを特徴とする路面状態判定装置。
【請求項2】
車両に搭載され,走行路面の路面状態を判定する路面状態判定装置において,
タイヤから発する走行音を取得する走行音取得部と,
路面の舗装種別ごとに走行音と路面状態とを対応付けた路面状態判定基準を格納した記憶部と,
路側に設置された路側機から路面の舗装種別を含む道路環境情報を受信し,前記走行路面の舗装種別を取得する舗装種別取得部と,
前記路面状態判定基準に基づき,前記取得された舗装種別と前記取得された走行音とに対応する当該走行路面の路面状態を判定する路面状態判定部と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部とを有し,
前記路面状態判定部は,前記判定された路面状態が前記取得された路面状態と異なる場合には,前記路面状態判定基準において当該走行音に対応する路面状態が当該取得された路面状態となるように,前記記憶部の記憶内容を変更することを特徴とする路面状態判定装置。
【請求項3】
車両に搭載され,走行路面の路面状態を判定する路面状態判定装置において,
走行路面前方の画像を撮像する路面画像取得部と,
路面の舗装種別ごとに路面画像と路面状態とを対応付けた路面状態判定基準を格納した記憶部と,
路面の舗装種別を有する地図情報を記憶し,自車位置と前記地図情報に基づいて,前記走行路面の舗装種別を検出する舗装種別検出部と,
前記路面状態判定基準に基づき,前記検出された舗装種別と前記取得された路面画像とに対応する当該走行路面の路面状態を判定する路面状態判定部と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部とを有し,
前記路面状態判定部は,前記判定された路面状態と前記取得された路面状態が異なる場合には,当該走行路面の舗装種別が,前記路面状態判定基準において当該路面画像と当該取得された路面状態により特定される舗装種別となるように,前記舗装種別検出部の記憶内容を変更することを特徴とする路面状態判定装置。
【請求項4】
車両に搭載され,走行路面の路面状態を判定する路面状態判定装置において,
走行路面前方の画像を撮像する路面画像取得部と,
路面の舗装種別ごとに路面画像と路面状態を対応付けた路面状態判定基準を格納した記憶部と,
路側に設置された路側機から路面の舗装種別を含む道路環境情報を受信し,前記走行路面の舗装種別を取得する舗装種別取得部と,
前記路面状態判定基準に基づき,前記取得された舗装種別と前記取得された路面画像とに対応する当該走行路面の路面状態を判定する路面状態判定部と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部とを有し,
前記路面状態判定部は,前記判定された路面状態が前記取得された路面状態と異なる場合には,前記路面状態判定基準において当該路面画像に対応する路面状態が当該取得された路面状態となるように,前記記憶部の記憶内容を変更することを特徴とする路面状態判定装置。
【請求項5】
車両に搭載され,走行路面の路面状態を判定する路面状態判定装置において,
タイヤから発する走行音を取得する走行音取得部と,
走行路面前方の画像を撮像する路面画像取得部と,
路面の舗装種別ごとに走行音と路面状態を対応付けた音声用路面状態判定基準と,路面の舗装種別ごとに路面画像と路面状態を対応付けた画像用路面状態判定基準とを格納した記憶部と,
路面の舗装種別を有する地図情報を記憶し,自車位置と前記地図情報に基づいて,前記走行路面の舗装種別を検出する舗装種別検出部と,
前記音声用路面状態判定基準に基づき,前記検出された舗装種別と前記取得された走行音に対応する当該走行路面の第1の路面状態を判定し,前記画像用路面状態判定基準に基づき,前記検出された舗装種別と前記取得された路面画像に対応する当該走行路面の第2の路面状態とを判定する路面状態判定部とを有し,
前記路面状態判定部は,前記第1の路面状態と第2の路面状態とが同じ場合は,当該路面状態を他の装置に出力し,前記第1の路面状態と第2の路面状態とが異なり,且つ前記取得した路面画像が所定の条件を満たさない場合は,前記第1の路面状態を他の装置に出力し,前記第1の路面状態と第2の路面状態とが異なり,且つ前記取得した路面画像が前記所定の条件を満たす場合は,前記第2の路面状態を他の装置に出力することを特徴とする路面状態判定装置。
【請求項6】
車両に搭載され,走行路面の路面状態を判定する路面状態判定装置において,
タイヤから発する走行音を取得する走行音取得部と,
走行路面前方の画像を撮像する路面画像取得部と,
路面の舗装種別ごとに走行音と路面状態を対応付けた音声用路面状態判定基準と,路面の舗装種別ごとに路面画像と路面状態を対応付けた画像用路面状態判定基準とを格納した記憶部と,
路側に設置された路側機から路面の舗装種別を含む道路環境情報を受信し,前記走行路面の舗装種別を取得する舗装種別取得部と,
前記音声用路面状態判定基準に基づき,前記取得された舗装種別と前記取得された走行音に対応する当該走行路面の第1の路面状態を判定し,前記画像用路面状態判定基準に基づき,前記検出された舗装種別と前記取得された路面画像に対応する当該走行路面の第2の路面状態とを判定する路面状態判定部とを有し,
前記路面状態判定部は,前記第1の路面状態と第2の路面状態とが同じ場合は,当該路面状態を他の装置に出力し,前記第1の路面状態と第2の路面状態とが異なり,且つ前記取得した路面画像が所定の条件を満たさない場合は,前記第1の路面状態を他の装置に出力し,前記第1の路面状態と第2の路面状態とが異なり,且つ前記取得した路面画像が前記所定の条件を満たす場合は,前記第2の路面状態を他の装置に出力することを特徴とする路面状態判定装置。
【請求項7】
請求項5において,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部を更に有し,
前記路面状態判定部は,前記第1の路面状態と前記取得した路面状態が異なる場合には,当該走行路面の舗装種別が,前記音声用路面状態判定基準において当該走行音と当該取得された路面状態により特定される舗装種別となるように,前記舗装種別検出部の記憶内容を変更し,前記第2の路面状態と前記取得した路面状態が異なる場合には,当該走行路面の舗装種別が,前記画像用路面状態判定基準において当該路面画像と当該取得された路面状態により特定される舗装種別となるように,前記舗装種別検出部の記憶内容を変更することを特徴とする路面状態判定装置。
【請求項8】
請求項6において,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部を更に有し,
前記路面状態判定部は,前記第1の路面状態と前記取得された路面状態が異なる場合には,前記音声用路面状態判定基準において,当該走行音に対応する路面状態を前記取得された路面状態となるように前記記憶部の記憶内容を変更し,前記第2の路面状態と前記取得された路面状態が異なる場合には,前記画像用路面状態判定基準において,当該路面画像に対応する路面状態を前記取得された路面状態となるように前記記憶部の記憶内容を変更することを特徴とする路面状態判定装置。
【請求項9】
請求項1乃至4または請求項7,8のいずれかにおいて,
前記車両の外部の情報源は,プローブカーシステムまたは車車間通信システムであることを特徴とする路面状態判定装置。
【請求項10】
車両の走行路面の路面状態を判定する路面状態判定方法において,
タイヤから発する走行音を取得する走行音取得工程と,
路面の舗装種別を有する地図情報と自車位置とに基づいて,前記走行路面の舗装種別を検出する舗装種別検出工程と,
路面の舗装種別ごとに走行音と路面状態とを対応付けた路面状態判定基準に基づき,前記検出された舗装種別と前記取得された走行音とに対応する当該走行路面の路面状態を判定する路面状態判定工程と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得工程と,
前記判定された路面状態と前記取得された路面状態が異なる場合には,当該走行路面の舗装種別が,前記路面状態判定基準において当該走行音と当該取得された路面状態により特定される舗装種別となるように,前記地図情報の内容を変更する地図情報修正工程とを有することを特徴とする路面状態判定方法。
【請求項11】
車両の走行路面の路面状態を判定する路面状態判定方法において,
タイヤから発する走行音を取得する走行音取得工程と,
路側に設置された路側機から路面の舗装種別を含む道路環境情報を受信し,前記走行路面の舗装種別を取得する舗装種別取得工程と,
路面の舗装種別ごとに走行音と路面状態とを対応付けた路面状態判定基準に基づき,前記取得された舗装種別と前記取得された走行音とに対応する当該走行路面の路面状態を判定する路面状態判定工程と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得工程と,
前記判定された路面状態が前記取得された路面状態と異なる場合には,前記路面状態判定基準において当該走行音に対応する路面状態が当該取得された路面状態となるように,前記路面状態判定基準の内容を変更する路面状態判定基準修正工程とを有することを特徴とする路面状態判定方法。
【請求項12】
車両の走行路面の路面状態を判定する路面状態判定方法において,
走行路面前方の画像を撮像する路面画像取得工程と,
路面の舗装種別を有する地図情報と自車位置とに基づいて,前記走行路面の舗装種別を検出する舗装種別検出工程と,
路面の舗装種別ごとに路面画像と路面状態とを対応付けた路面状態判定基準に基づき,前記検出された舗装種別と前記取得された路面画像とに対応する当該走行路面の路面状態を判定する路面状態判定工程と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得工程と,
前記判定された路面状態と前記取得された路面状態が異なる場合には,当該走行路面の舗装種別が,前記路面状態判定基準において当該路面画像と当該取得された路面状態により特定される舗装種別となるように,前記地図情報の内容を変更する地図情報修正工程とを有することを特徴とする路面状態判定方法。
【請求項13】
車両の走行路面の路面状態を判定する路面状態判定方法において,
走行路面前方の画像を撮像する路面画像取得工程と,
路側に設置された路側機から路面の舗装種別を含む道路環境情報を受信し,前記走行路面の舗装種別を取得する舗装種別取得工程と,
路面の舗装種別ごとに路面画像と路面状態とを対応付けた路面状態判定基準に基づき,前記取得された舗装種別と前記取得された路面画像とに対応する当該走行路面の路面状態を判定する路面状態判定工程と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得工程と,
前記判定された路面状態が前記取得された路面状態と異なる場合には,前記路面状態判定基準において当該路面画像に対応する路面状態が当該取得された路面状態となるように,前記路面状態判定基準の内容を変更する路面状態判定基準修正工程とを有することを特徴とする路面状態判定方法。
【請求項1】
車両に搭載され,走行路面の路面状態を判定する路面状態判定装置において,
タイヤから発する走行音を取得する走行音取得部と,
路面の舗装種別ごとに走行音と路面状態とを対応付けた路面状態判定基準を格納した記憶部と,
路面の舗装種別を有する地図情報を記憶し,自車位置と前記地図情報に基づいて,前記走行路面の舗装種別を検出する舗装種別検出部と,
前記路面状態判定基準に基づき,前記検出された舗装種別と前記取得された走行音とに対応する当該走行路面の路面状態を判定する路面状態判定部と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部とを有し,
前記路面状態判定部は,前記判定された路面状態と前記取得された路面状態が異なる場合には,当該走行路面の舗装種別が,前記路面状態判定基準において当該走行音と当該取得された路面状態により特定される舗装種別となるように,前記舗装種別検出部の記憶内容を変更することを特徴とする路面状態判定装置。
【請求項2】
車両に搭載され,走行路面の路面状態を判定する路面状態判定装置において,
タイヤから発する走行音を取得する走行音取得部と,
路面の舗装種別ごとに走行音と路面状態とを対応付けた路面状態判定基準を格納した記憶部と,
路側に設置された路側機から路面の舗装種別を含む道路環境情報を受信し,前記走行路面の舗装種別を取得する舗装種別取得部と,
前記路面状態判定基準に基づき,前記取得された舗装種別と前記取得された走行音とに対応する当該走行路面の路面状態を判定する路面状態判定部と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部とを有し,
前記路面状態判定部は,前記判定された路面状態が前記取得された路面状態と異なる場合には,前記路面状態判定基準において当該走行音に対応する路面状態が当該取得された路面状態となるように,前記記憶部の記憶内容を変更することを特徴とする路面状態判定装置。
【請求項3】
車両に搭載され,走行路面の路面状態を判定する路面状態判定装置において,
走行路面前方の画像を撮像する路面画像取得部と,
路面の舗装種別ごとに路面画像と路面状態とを対応付けた路面状態判定基準を格納した記憶部と,
路面の舗装種別を有する地図情報を記憶し,自車位置と前記地図情報に基づいて,前記走行路面の舗装種別を検出する舗装種別検出部と,
前記路面状態判定基準に基づき,前記検出された舗装種別と前記取得された路面画像とに対応する当該走行路面の路面状態を判定する路面状態判定部と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部とを有し,
前記路面状態判定部は,前記判定された路面状態と前記取得された路面状態が異なる場合には,当該走行路面の舗装種別が,前記路面状態判定基準において当該路面画像と当該取得された路面状態により特定される舗装種別となるように,前記舗装種別検出部の記憶内容を変更することを特徴とする路面状態判定装置。
【請求項4】
車両に搭載され,走行路面の路面状態を判定する路面状態判定装置において,
走行路面前方の画像を撮像する路面画像取得部と,
路面の舗装種別ごとに路面画像と路面状態を対応付けた路面状態判定基準を格納した記憶部と,
路側に設置された路側機から路面の舗装種別を含む道路環境情報を受信し,前記走行路面の舗装種別を取得する舗装種別取得部と,
前記路面状態判定基準に基づき,前記取得された舗装種別と前記取得された路面画像とに対応する当該走行路面の路面状態を判定する路面状態判定部と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部とを有し,
前記路面状態判定部は,前記判定された路面状態が前記取得された路面状態と異なる場合には,前記路面状態判定基準において当該路面画像に対応する路面状態が当該取得された路面状態となるように,前記記憶部の記憶内容を変更することを特徴とする路面状態判定装置。
【請求項5】
車両に搭載され,走行路面の路面状態を判定する路面状態判定装置において,
タイヤから発する走行音を取得する走行音取得部と,
走行路面前方の画像を撮像する路面画像取得部と,
路面の舗装種別ごとに走行音と路面状態を対応付けた音声用路面状態判定基準と,路面の舗装種別ごとに路面画像と路面状態を対応付けた画像用路面状態判定基準とを格納した記憶部と,
路面の舗装種別を有する地図情報を記憶し,自車位置と前記地図情報に基づいて,前記走行路面の舗装種別を検出する舗装種別検出部と,
前記音声用路面状態判定基準に基づき,前記検出された舗装種別と前記取得された走行音に対応する当該走行路面の第1の路面状態を判定し,前記画像用路面状態判定基準に基づき,前記検出された舗装種別と前記取得された路面画像に対応する当該走行路面の第2の路面状態とを判定する路面状態判定部とを有し,
前記路面状態判定部は,前記第1の路面状態と第2の路面状態とが同じ場合は,当該路面状態を他の装置に出力し,前記第1の路面状態と第2の路面状態とが異なり,且つ前記取得した路面画像が所定の条件を満たさない場合は,前記第1の路面状態を他の装置に出力し,前記第1の路面状態と第2の路面状態とが異なり,且つ前記取得した路面画像が前記所定の条件を満たす場合は,前記第2の路面状態を他の装置に出力することを特徴とする路面状態判定装置。
【請求項6】
車両に搭載され,走行路面の路面状態を判定する路面状態判定装置において,
タイヤから発する走行音を取得する走行音取得部と,
走行路面前方の画像を撮像する路面画像取得部と,
路面の舗装種別ごとに走行音と路面状態を対応付けた音声用路面状態判定基準と,路面の舗装種別ごとに路面画像と路面状態を対応付けた画像用路面状態判定基準とを格納した記憶部と,
路側に設置された路側機から路面の舗装種別を含む道路環境情報を受信し,前記走行路面の舗装種別を取得する舗装種別取得部と,
前記音声用路面状態判定基準に基づき,前記取得された舗装種別と前記取得された走行音に対応する当該走行路面の第1の路面状態を判定し,前記画像用路面状態判定基準に基づき,前記検出された舗装種別と前記取得された路面画像に対応する当該走行路面の第2の路面状態とを判定する路面状態判定部とを有し,
前記路面状態判定部は,前記第1の路面状態と第2の路面状態とが同じ場合は,当該路面状態を他の装置に出力し,前記第1の路面状態と第2の路面状態とが異なり,且つ前記取得した路面画像が所定の条件を満たさない場合は,前記第1の路面状態を他の装置に出力し,前記第1の路面状態と第2の路面状態とが異なり,且つ前記取得した路面画像が前記所定の条件を満たす場合は,前記第2の路面状態を他の装置に出力することを特徴とする路面状態判定装置。
【請求項7】
請求項5において,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部を更に有し,
前記路面状態判定部は,前記第1の路面状態と前記取得した路面状態が異なる場合には,当該走行路面の舗装種別が,前記音声用路面状態判定基準において当該走行音と当該取得された路面状態により特定される舗装種別となるように,前記舗装種別検出部の記憶内容を変更し,前記第2の路面状態と前記取得した路面状態が異なる場合には,当該走行路面の舗装種別が,前記画像用路面状態判定基準において当該路面画像と当該取得された路面状態により特定される舗装種別となるように,前記舗装種別検出部の記憶内容を変更することを特徴とする路面状態判定装置。
【請求項8】
請求項6において,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得部を更に有し,
前記路面状態判定部は,前記第1の路面状態と前記取得された路面状態が異なる場合には,前記音声用路面状態判定基準において,当該走行音に対応する路面状態を前記取得された路面状態となるように前記記憶部の記憶内容を変更し,前記第2の路面状態と前記取得された路面状態が異なる場合には,前記画像用路面状態判定基準において,当該路面画像に対応する路面状態を前記取得された路面状態となるように前記記憶部の記憶内容を変更することを特徴とする路面状態判定装置。
【請求項9】
請求項1乃至4または請求項7,8のいずれかにおいて,
前記車両の外部の情報源は,プローブカーシステムまたは車車間通信システムであることを特徴とする路面状態判定装置。
【請求項10】
車両の走行路面の路面状態を判定する路面状態判定方法において,
タイヤから発する走行音を取得する走行音取得工程と,
路面の舗装種別を有する地図情報と自車位置とに基づいて,前記走行路面の舗装種別を検出する舗装種別検出工程と,
路面の舗装種別ごとに走行音と路面状態とを対応付けた路面状態判定基準に基づき,前記検出された舗装種別と前記取得された走行音とに対応する当該走行路面の路面状態を判定する路面状態判定工程と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得工程と,
前記判定された路面状態と前記取得された路面状態が異なる場合には,当該走行路面の舗装種別が,前記路面状態判定基準において当該走行音と当該取得された路面状態により特定される舗装種別となるように,前記地図情報の内容を変更する地図情報修正工程とを有することを特徴とする路面状態判定方法。
【請求項11】
車両の走行路面の路面状態を判定する路面状態判定方法において,
タイヤから発する走行音を取得する走行音取得工程と,
路側に設置された路側機から路面の舗装種別を含む道路環境情報を受信し,前記走行路面の舗装種別を取得する舗装種別取得工程と,
路面の舗装種別ごとに走行音と路面状態とを対応付けた路面状態判定基準に基づき,前記取得された舗装種別と前記取得された走行音とに対応する当該走行路面の路面状態を判定する路面状態判定工程と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得工程と,
前記判定された路面状態が前記取得された路面状態と異なる場合には,前記路面状態判定基準において当該走行音に対応する路面状態が当該取得された路面状態となるように,前記路面状態判定基準の内容を変更する路面状態判定基準修正工程とを有することを特徴とする路面状態判定方法。
【請求項12】
車両の走行路面の路面状態を判定する路面状態判定方法において,
走行路面前方の画像を撮像する路面画像取得工程と,
路面の舗装種別を有する地図情報と自車位置とに基づいて,前記走行路面の舗装種別を検出する舗装種別検出工程と,
路面の舗装種別ごとに路面画像と路面状態とを対応付けた路面状態判定基準に基づき,前記検出された舗装種別と前記取得された路面画像とに対応する当該走行路面の路面状態を判定する路面状態判定工程と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得工程と,
前記判定された路面状態と前記取得された路面状態が異なる場合には,当該走行路面の舗装種別が,前記路面状態判定基準において当該路面画像と当該取得された路面状態により特定される舗装種別となるように,前記地図情報の内容を変更する地図情報修正工程とを有することを特徴とする路面状態判定方法。
【請求項13】
車両の走行路面の路面状態を判定する路面状態判定方法において,
走行路面前方の画像を撮像する路面画像取得工程と,
路側に設置された路側機から路面の舗装種別を含む道路環境情報を受信し,前記走行路面の舗装種別を取得する舗装種別取得工程と,
路面の舗装種別ごとに路面画像と路面状態とを対応付けた路面状態判定基準に基づき,前記取得された舗装種別と前記取得された路面画像とに対応する当該走行路面の路面状態を判定する路面状態判定工程と,
当該走行路面の路面状態を前記車両の外部の情報源から取得する路面状態取得工程と,
前記判定された路面状態が前記取得された路面状態と異なる場合には,前記路面状態判定基準において当該路面画像に対応する路面状態が当該取得された路面状態となるように,前記路面状態判定基準の内容を変更する路面状態判定基準修正工程とを有することを特徴とする路面状態判定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−309832(P2007−309832A)
【公開日】平成19年11月29日(2007.11.29)
【国際特許分類】
【出願番号】特願2006−140451(P2006−140451)
【出願日】平成18年5月19日(2006.5.19)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成19年11月29日(2007.11.29)
【国際特許分類】
【出願日】平成18年5月19日(2006.5.19)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]