
路面画像処理システム及び路面画像処理方法

【課題】ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することが可能な技術を提供する。
【解決手段】本発明の路面画像処理システムは、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えている。
【解決手段】本発明の路面画像処理システムは、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行する車両から撮影された路面画像を処理する技術に関する。
【背景技術】
【0002】
特許文献1に、走行しながら路面を撮影し、撮影した複数の画像を配列して路面の連続画像を生成するシステムが開示されている。この路面画像生成システムは、車両の幅方向に長い視野範囲を高精細に撮影するラインカメラを有している。車両がラインカメラの視野範囲の幅(車両の進行方向に沿った距離)だけ進む毎に、ラインカメラで路面を撮影する。ラインカメラで繰り返し撮影することで得られた複数枚の画像を配列することで、ラインカメラで撮影された範囲の路面全体の画像を生成することができる。また、この画像生成システムでは、磁気コンパスやジャイロセンサなどを用いて車両の進行方向を取得し、車両の走行距離とその走行距離における車両の進行方向から車両の走行軌道を演算し、演算した車両の走行軌道からラインカメラの視野の位置を演算する。ラインカメラで撮影した複数枚の画像を、撮影時のラインカメラの視野の位置に応じて配列することによって、ラインカメラで撮影された範囲の路面全体の画像を生成する。このように、ラインカメラで撮影した複数の画像を配列することで、路面がカーブしている場合にはカーブしている路面全体の画像を生成することができる。この技術がないと、カーブしている路面を撮影したにもかかわらず、直線的に伸びている路面画像が生成されてしまう。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−214854号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の技術では、車両の進行方向を取得するために、磁気コンパスやジャイロセンサなどのセンサが必要となる。ラインカメラで撮影した画像から車両の進行方向を取得することができれば、これらのセンサを車両に搭載していなくても、ラインカメラで撮影された範囲の路面全体の画像を正確に生成することができる。本明細書では、ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することが可能な技術を提供する。
【課題を解決するための手段】
【0005】
本発明の路面画像処理システムは、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えている。
【0006】
上記のシステムにおいて車両が旋回して走行した場合、第1ラインカメラが撮影した画像系列を順に配列した画像と、第2ラインカメラで撮影した画像系列を順に配列した画像では、車両の進行方向に応じて画像の傾きがそれぞれ異なったものとなる。上記のシステムでは、第1ラインカメラの画像系列に対してアフィン変換を施した画像と、第2ラインカメラの画像系列に対してアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する。この探索されたアフィン変換パラメータから、第1視野範囲と第2視野範囲が交差する点の進行方向を算出することができる。このシステムによれば、磁気コンパスやジャイロセンサなどのセンサを用いることなく、車両の進行方向を取得することができる。
【0007】
上記の路面画像処理システムは、車両の走行距離に応じた第1視野範囲と第2視野範囲が交差する点の進行方向に基づいて、第1視野範囲と第2視野範囲が交差する点の軌跡を特定する手段をさらに備えることが好ましい。
【0008】
上記の路面画像処理システムによれば、車両が旋回して走行した場合であっても、第1ラインカメラの画像系列と第2ラインカメラの画像系列から、第1視野範囲と第2視野範囲が交差する点の軌跡を特定し、車両の走行軌道を特定することができる。
【0009】
上記の路面画像処理システムは、第1ラインカメラおよび/または第2ラインカメラが撮影した画像系列と、第1視野範囲と第2視野範囲が交差する点の軌跡に基づいて、路面の全体画像を生成する手段をさらに備えることが好ましい。
【0010】
上記の路面画像処理システムによれば、車両が旋回して走行した場合であっても、路面の全体画像を正確に生成することができる。
【0011】
本発明は方法として具現化することもできる。その方法は、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段を備える路面画像撮影装置で撮影された路面の画像を処理する方法である。その方法は、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する工程と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する工程を備えている。
【0012】
上記の方法は、車両の走行距離に応じた第1視野範囲と第2視野範囲が交差する点の進行方向に基づいて、第1視野範囲と第2視野範囲が交差する点の軌跡を特定する工程をさらに備えることが好ましい。
【0013】
上記の方法は、第1ラインカメラおよび/または第2ラインカメラが撮影した画像系列と、第1視野範囲と第2視野範囲が交差する点の軌跡に基づいて、路面の全体画像を生成する工程をさらに備えることが好ましい。
【発明の効果】
【0014】
本発明の路面画像処理システムによれば、ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することができる。
【図面の簡単な説明】
【0015】
【図1】路面画像処理システム10の概略側面図。
【図2】路面画像処理システム10の概略上面図。
【図3】全体画像生成処理を示すフローチャート。
【図4】車両12が旋回走行する際の、車両12の進行方向N1と、ラインカメラ14,16の進行方向N2と、左側後輪18aの進行方向N3を示す図。
【図5】ラインカメラ14,16の画像系列から、ラインカメラ14,16の進行方向N2を特定する原理を示す図。
【図6】軌跡Tの更新処理と、全体路面画像Sの更新処理を示す図。
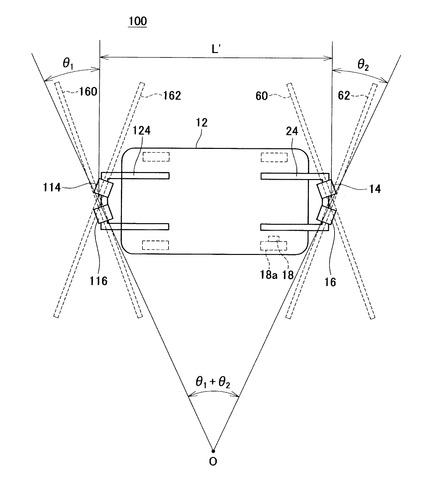
【図7】路面画像処理システム100の概略上面図。
【発明を実施するための形態】
【0016】
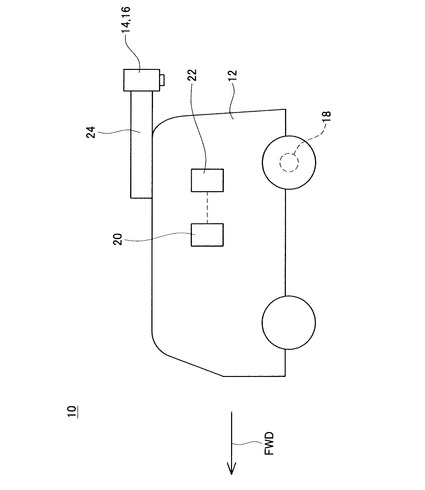
図1は、実施例に係る路面画像処理システム10の概略側面図を示しており、図2は路面画像処理システム10の概略上面図を示している。図1、2に示すように、路面画像処理システム10は、車両12と、ラインカメラ14と、ラインカメラ16と、エンコーダ18と、記憶装置20と、制御装置22を有している。
【0017】
車両12は、ワンボックスカーを測定用に改造したものである。車両12の上部には、車両12から後方に突出する支持体24が設置されている。ラインカメラ14とラインカメラ16は、支持体24によって、車両12の後方上部に固定されている。ラインカメラ14とラインカメラ16は、真下に向けて固定されている。ラインカメラ14、16は、大きさ10μm×10μmの撮像素子(CCD、CMOS等)が1本のライン状に多数(約2000個)配列された撮像素子ユニットを内蔵しており、レンズを通して撮像素子群の大きさが投影された視野範囲内を撮影する。なお、個々の撮像素子の視野範囲の大きさは路面までの距離に応じて異なるものとなるが、1つの撮像素子の視野範囲に対して1つの出力値が定まるので、各撮像素子の出力値は、その視野範囲内での明るさの平均値、あるいは、視野範囲の中心点の明るさとみなすことができる。ラインカメラ14、16は、真下に向けて路面を撮影する。
【0018】
図2の範囲60は、ラインカメラ14の視野範囲を示している。ラインカメラ14は、視野範囲60内の路面を撮影する。図2に示すように、視野範囲60は、車両12の前方方向FWDに対して角度φ1だけ傾斜した方向に長く伸びている。視野範囲60の長手方向の長さは約1700mmであり、視野範囲60の短手方向の長さは約1mmである。
【0019】
図2の範囲62は、ラインカメラ16の視野範囲を示している。ラインカメラ16は、視野範囲62内の路面を撮影する。図2に示すように、視野範囲62は、車両12の前方方向FWDに対して、視野範囲60と反対側に角度φ2だけ傾斜した方向に長く伸びている。視野範囲62の長手方向の長さは約1700mmであり、視野範囲60の短手方向の長さは約1mmである。
【0020】
ラインカメラ14、16は、視野範囲60と視野範囲62が交差してX字を形成するように配置されている。視野範囲60と視野範囲62が交差する位置は各カメラのレンズの大きさ分だけ各視野範囲の中心からずれているが、シフトレンズを用いることで、視野範囲の中心にシフトすることができる。従って、以下では視野範囲60と視野範囲62が中央で交差しているとして説明する。
【0021】
ラインカメラ14とラインカメラ16は、同一の路面を撮影している。したがって、ラインカメラ14の視野範囲60が通過する範囲とラインカメラ16の視野範囲62が通過する範囲が重複する箇所については、ラインカメラ14により撮影した画像とラインカメラ16により撮影した画像の双方に同一の被写体が写り込む。
【0022】
エンコーダ18は車両12の左側後輪18aに取り付けられており、左側後輪18aの回転数を検出する。エンコーダ18は、左側後輪18aの回転を検出することで、車両12の走行距離を検出する。本実施例では、エンコーダ18は、車両12が0.3mm走行する毎にパルスを出力する。
【0023】
記憶装置20は、制御装置22に接続されている。記憶装置20は、ラインカメラ14、16によって撮影された画像等を記憶する。
【0024】
制御装置22には、ラインカメラ14、16、エンコーダ18、記憶装置20が接続されている。制御装置22は、ラインカメラ14、16及び記憶装置20の動作を制御する。制御装置22には、エンコーダ18から上述したパルスが入力される。制御装置22は、1パルスが入力される毎(すなわち、車両12が0.3mm走行する毎)に、ラインカメラ14、16で撮影を行う。制御装置22は、撮影した画像をその撮影順序と共に記憶装置20に記憶させる。また、制御装置22は、エンコーダ18から1000パルスが入力される毎(すなわち、車両が300mm進む毎)に、図3に示す全体画像生成処理を実行する。全体画像生成処理の実行中においても、ラインカメラ14、16は1パルス毎に画像を撮影している。全体画像生成処理の実行中に撮影された画像は、次の全体画像生成処理に使用される。
【0025】
上述したように、ラインカメラ14、16は1パルス毎に路面を撮影し、制御装置22は1000パルス毎に全体画像生成処理を実行する。したがって、制御装置22が全体画像生成処理を開始する時点では、ラインカメラ14により1000個の画像が得られており、ラインカメラ16によって1000個の画像が得られている。以下ではラインカメラ14により得られた1000個の画像をラインカメラ14の画像系列といい、ラインカメラ16により得られた1000個の画像をラインカメラ16の画像系列という。
【0026】
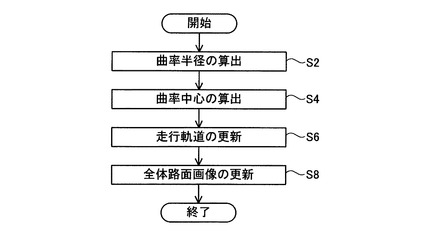
図3のステップS2では、ラインカメラ14、16の画像系列に基づいて、ラインカメラ14,16の視野範囲60,62の中央点が移動した軌跡の曲率半径rの算出を行う。以下では、ラインカメラ14、16の画像系列に基づいて、曲率半径rを算出する原理について説明する。
【0027】
図4は、車両12が旋回走行する際の、車両12の進行方向N1と、ラインカメラ14,16の進行方向N2と、左側後輪18aの進行方向N3を示している。なお、ここでいう車両12の進行方向N1とは、車両12の左右の後輪の中心点の進行方向を意味し、また、ラインカメラ14,16の進行方向N2とは、ラインカメラ14,16の視野範囲60,62の中央点の進行方向を意味する。ここでは、車両12の左右の後輪の中心点が移動した軌跡の曲率中心と、ラインカメラ14,16の視野範囲60,62の中央点の軌跡の曲率中心と、左側後輪18aの軌跡の曲率中心が、すべて一致していると仮定する。車両12が旋回走行する際には、車両12の進行方向N1は車両12の左右の後輪の中心点が移動した軌跡の接線方向に沿うものとなる。車両12の左側後輪18aの進行方向N3も、車両12の進行方向N1と同様となる。しかしながら、ラインカメラ14,16は、左側後輪18aから後方に距離Lだけオフセットした位置で車両12に対して固定されているから、ラインカメラ14,16の進行方向N2は車両12の進行方向N1から傾斜角度δだけ傾斜する。この傾斜角度δは、以下の数式で表現される。
【0028】
【数1】

【0029】
従って、ラインカメラ14,16の画像系列に基づいてラインカメラ14,16の進行方向N2を特定することができれば、車両12の進行方向N1に対するラインカメラ14,16の進行方向N2の傾斜角度δを特定することができ、車両12の前後方向に沿った車両12の左側後輪18aからラインカメラ14,16の視野範囲60,62の中央点までの距離Lと傾斜角度δから、曲率半径rを特定することができる。
【0030】
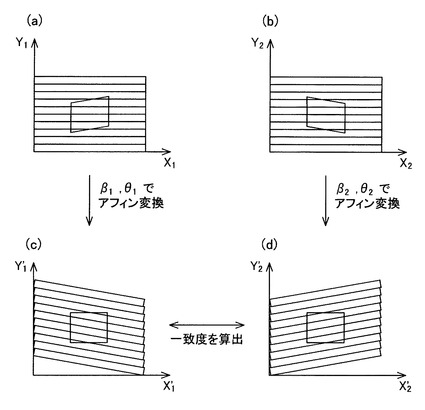
図5は、ラインカメラ14,16の画像系列から、ラインカメラ14,16の進行方向N2を特定する原理を示している。図5では、正方形の模様が付された路面を、路面画像処理システム10で撮影した場合を示している。図5の(a)、(b)に示すように、ラインカメラ14,16の画像系列を順に配列した場合、ラインカメラ14,16の視野範囲60,62が進行方向に対して傾いているので、実際の被写体に比べて傾いた画像が生成される。また、ラインカメラ14,16の視野範囲60,62が進行方向に対して傾いているので、ラインカメラ14,16の撮影ピッチは、撮影から撮影までの間に車両12が走行した距離(すなわち0.3mm)とは相違し、ラインカメラ14,16の画像系列を順に配列した場合、実際の被写体とは伸縮が異なる画像が生成される。このような画像の傾きと伸縮については、アフィン変換を施すことで修正することができる。画像のピクセルの位置を(x,y)とし、傾きの修正量をθ、伸縮の修正量をβとした場合、アフィン変換後のピクセルの位置(x’,y’)は以下の数式で与えられる。
【0031】
【数2】
【0032】
ラインカメラ14とラインカメラ16が同一の被写体を撮像した場合、図5の(a)に示すラインカメラ14の画像系列に適切なアフィン変換を施して得られる図5の(c)の画像と、図5の(b)に示すラインカメラ16の画像系列に適切なアフィン変換を施して得られる図5の(d)の画像は、視野範囲が重複する範囲では画像が一致するはずである。そこで、本実施例では、パラメータθ1、β1、θ2、β2を仮定して、ラインカメラ14が撮影した画像系列のアフィン変換後の画像と、ラインカメラ16が撮影した画像系列のアフィン変換後の画像について一致度の計算を行う。そして、パラメータθ1、β1、θ2、β2の値を様々に変化させながら一致度の計算を繰り返し行い、最も高い一致度を与えるアフィン変換のパラメータθ1、β1、θ2、β2を探索する。
【0033】
すなわち、図5の(a)に示すラインカメラ14の画像系列については、以下に示すアフィン変換を行って、図5の(c)に示す画像を生成する。
【0034】
【数3】
【0035】
また、図5の(b)に示すラインカメラ16の画像系列については、以下に示すアフィン変換を行って、図5の(d)に示す画像を生成する。
【0036】
【数4】
【0037】
そして、図5の(c)に示すアフィン変換後のラインカメラ14の画像と、図5の(d)に示すアフィン変換後のラインカメラ16の画像について、重複部分の一致度を算出する。
【0038】
上記の一致度の算出を、パラメータθ1、β1、θ2、β2の値を様々に変化させながら繰り返し行い、最も高い一致度を与えるパラメータθ1、β1、θ2、β2の組み合わせを探索する。
【0039】
なお、画像の傾きの修正量θ1、θ2については、ラインカメラ14,16の進行方向N2の車両12の進行方向N1からの傾斜角度δ(図4参照)と、ラインカメラ14の車両12に対する取付角度φ1(図2参照)と、ラインカメラ16の車両12に対する取付角度φ2(図2参照)との間に、以下の関係式が成り立つ。
【0040】
【数5】
【0041】
従って、ラインカメラ14,16の車両12に対する取付角度φ1、φ2が測定等により取得されている場合には、ラインカメラ14,16の進行方向N2の車両12の進行方向N1からの傾斜角度δを探索することで、上記の関係式からθ1、θ2を特定することができる。探索すべきパラメータの個数を減らして、計算負荷を低減することができる。
【0042】
また、画像の伸縮の修正量β1、β2については、車両12が直進する際の伸縮の修正量β10、β20との間に、以下の関係式が成り立つ。
【0043】
【数6】
【0044】
ここで、Rは車両12の左側後輪18aが移動した軌跡の曲率半径、Wは車両12の左右方向に沿った車両12の左側後輪18aからラインカメラ14,16の中央点までの距離である(図4参照)。従って、車両12が直進する際の伸縮の修正量β10、β20が測定等により取得されている場合には、ラインカメラ14,16の進行方向N2の車両12の進行方向N1からの傾斜角度δを探索することで、上記の関係式からβ1、β2を特定することができる。探索すべきパラメータの個数を減らして、計算負荷を低減することができる。
【0045】
なお、画像の一致度の算出処理において、一致する被写体を探索する範囲の大きさは、曲率半径rに比べて非常に小さい。従って、この範囲においては、視野範囲60,62は並進移動しているとみなしてよく、ラインカメラ14,16の画像系列の間隔は平行とみなしてよい。このため、上記したβ1、β2はほぼ同じと仮定して上記の演算を行ってもよい。このような仮定をおくと、探索すべきパラメータの個数を減らして、計算負荷を低減することができる。
【0046】
以上のように、本実施例では、探索すべきパラメータは、ラインカメラ14,16の進行方向N2の車両12の進行方向N1からの傾斜角度δの1つとなる。探索するパラメータの個数を減らして、計算負荷を低減することができる。
【0047】
なお、上記では、車両の進行方向N1と左側後輪18aの進行方向N3が一致すると仮定できる場合について説明したが、両者が一致しない場合には、以下の関係式を用いることができる。
【0048】
【数7】
【0049】
この場合、探索すべきパラメータは、ラインカメラ14,16の進行方向N2の車両12の進行方向N1からの傾斜角度δと、車両12の左側後輪18aが移動した軌跡の曲率半径Rの2つである。
【0050】
車両12の進行方向N1に対するラインカメラ14,16の進行方向N2の傾斜角度δが特定されると、ラインカメラ14,16の中央点が移動した軌跡の曲率半径rを算出することができる。
【0051】
図3のステップS4では、ステップS2において算出された曲率半径rに基づいて、車両12から見た曲率中心cの位置を特定する。
【0052】
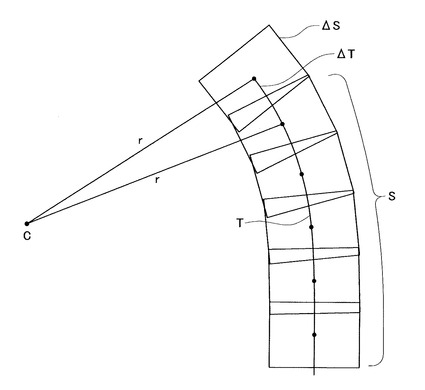
ステップS6では、ラインカメラ14,16の視野範囲60,62の中央点が移動した軌跡Tの更新処理を行う。図6に示すように、ステップS6では、前回までの全体路面画像生成処理で取得されている軌跡Tの端部に、ステップS2で特定された曲率半径rとステップS4で特定された曲率中心cに基づく円弧状の軌跡ΔTを新たに追加することで、ラインカメラ14,16の視野範囲60,62の中央点が移動した軌跡Tを更新する。
【0053】
ステップS8では、全体路面画像Sの更新処理を行う。図6に示すように、ステップS8では、前回までの全体路面画像生成処理で生成されている全体路面画像Sに、新たな路面画像ΔSを貼り合わせることによって、全体路面画像を更新する。新たな路面画像ΔSを貼り合わせる際の位置および角度は、ステップS6で更新された軌跡Tに基づいて特定される。新たな路面画像ΔSとしては、ラインカメラ14の画像系列をアフィン変換した画像を用いてもよいし、ラインカメラ16の画像系列をアフィン変換した画像を用いてもよいし、両者を組み合わせた画像を用いてもよい。
【0054】
なお上記ではラインカメラ14,16の視野範囲60,62が交差する中央点の位置が車両12に対して変化しないものとして演算を行っているが、視野範囲60,62が交差する中央点の車両12に対する位置を正規化相関によって毎回算出してもよい。
【0055】
この路面画像処理システム10では、車両12がカーブする路面を走行する場合でも、その路面全体の画像を正確に生成することができる。また、上述したラインカメラ14、16は、エリアカメラに比べて極めて短い周期で路面を撮影することができる。したがって、路面画像処理システム10は、高速で走行しながら路面の画像を生成することができる。
【0056】
また、上述した実施例では、路面を撮影しながら路面全体の画像を生成する路面画像処理システム10について説明したが、路面の撮影と上述した全体画像生成処理を必ずしも同時進行で行う必要はない。例えば、路面の撮影を行って記憶装置20に撮影した画像とその順序を示すデータを記憶させておき、その後に記憶させたデータを別の計算機に移して、その計算機で全体画像生成処理を行ってもよい。また、路面を撮影しながら、撮影した画像とその撮影順序を示すデータを無線により外部の計算機に送信し、外部の計算機で全体画像生成処理を行ってもよい。
【0057】
なお、図6に示すように隣接する画像同士が重複する場合は、重複する中の1つの画像を優先表示するようにして画像を生成してもよいし、重複する画像を平均化する等した画像を表示するようにしてもよい。
【0058】
上記の実施例では、ラインカメラ14とラインカメラ16が車両12の後方に固定されており、車両12の後方の路面を撮影する構成について説明したが、ラインカメラ14とラインカメラ16を車両12の前方に固定し、車両12の前方の路面を撮影する構成としてもよい。
【0059】
上記の実施例では、エンコーダ18が車両12の左側後輪18aの回転数を検出する場合について説明したが、エンコーダ18は車両12の右側後輪の回転数を検出する構成としてもよい。あるいは、ラインカメラ14とラインカメラ16の中央点の近傍に走行距離の計測用の車輪を別途設けて、その車輪の回転数をエンコーダ18で検出する構成としてもよい。
【0060】
上記の実施例では、車両12に一組のラインカメラ14、16を搭載する場合について説明したが、図7に示す路面画像処理システム100のように、もう一組のラインカメラ114,116を支持体124を介して車両12に搭載してもよい。この場合、ラインカメラ114は視野範囲162を撮影し、ラインカメラ116は視野範囲160を撮影する。路面画像処理システム100を用いることで、車両12が旋回走行する際の曲率中心と曲率半径を特定することができる。
【0061】
以上、本発明の具体例を詳細に説明したが、これらは例示に過ぎず、特許請求の範囲を限定するものではない。特許請求の範囲に記載の技術には、以上に例示した具体例を様々に変形、変更したものが含まれる。本明細書または図面に説明した技術要素は、単独であるいは各種の組合せによって技術的有用性を発揮するものであり、出願時請求項記載の組合せに限定されるものではない。また、本明細書または図面に例示した技術は複数目的を同時に達成し得るものであり、そのうちの一つの目的を達成すること自体で技術的有用性を持つものである。
【符号の説明】
【0062】
10:路面画像処理システム
12:車両
14:ラインカメラ
16:ラインカメラ
18:エンコーダ
18a:左側後輪
20:記憶装置
22:制御装置
24:支持体
60:視野範囲
62:視野範囲
100:路面画像処理システム
114:ラインカメラ
116:ラインカメラ
124:支持体
160:視野範囲
162:視野範囲
【技術分野】
【0001】
本発明は、走行する車両から撮影された路面画像を処理する技術に関する。
【背景技術】
【0002】
特許文献1に、走行しながら路面を撮影し、撮影した複数の画像を配列して路面の連続画像を生成するシステムが開示されている。この路面画像生成システムは、車両の幅方向に長い視野範囲を高精細に撮影するラインカメラを有している。車両がラインカメラの視野範囲の幅(車両の進行方向に沿った距離)だけ進む毎に、ラインカメラで路面を撮影する。ラインカメラで繰り返し撮影することで得られた複数枚の画像を配列することで、ラインカメラで撮影された範囲の路面全体の画像を生成することができる。また、この画像生成システムでは、磁気コンパスやジャイロセンサなどを用いて車両の進行方向を取得し、車両の走行距離とその走行距離における車両の進行方向から車両の走行軌道を演算し、演算した車両の走行軌道からラインカメラの視野の位置を演算する。ラインカメラで撮影した複数枚の画像を、撮影時のラインカメラの視野の位置に応じて配列することによって、ラインカメラで撮影された範囲の路面全体の画像を生成する。このように、ラインカメラで撮影した複数の画像を配列することで、路面がカーブしている場合にはカーブしている路面全体の画像を生成することができる。この技術がないと、カーブしている路面を撮影したにもかかわらず、直線的に伸びている路面画像が生成されてしまう。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−214854号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の技術では、車両の進行方向を取得するために、磁気コンパスやジャイロセンサなどのセンサが必要となる。ラインカメラで撮影した画像から車両の進行方向を取得することができれば、これらのセンサを車両に搭載していなくても、ラインカメラで撮影された範囲の路面全体の画像を正確に生成することができる。本明細書では、ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することが可能な技術を提供する。
【課題を解決するための手段】
【0005】
本発明の路面画像処理システムは、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えている。
【0006】
上記のシステムにおいて車両が旋回して走行した場合、第1ラインカメラが撮影した画像系列を順に配列した画像と、第2ラインカメラで撮影した画像系列を順に配列した画像では、車両の進行方向に応じて画像の傾きがそれぞれ異なったものとなる。上記のシステムでは、第1ラインカメラの画像系列に対してアフィン変換を施した画像と、第2ラインカメラの画像系列に対してアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する。この探索されたアフィン変換パラメータから、第1視野範囲と第2視野範囲が交差する点の進行方向を算出することができる。このシステムによれば、磁気コンパスやジャイロセンサなどのセンサを用いることなく、車両の進行方向を取得することができる。
【0007】
上記の路面画像処理システムは、車両の走行距離に応じた第1視野範囲と第2視野範囲が交差する点の進行方向に基づいて、第1視野範囲と第2視野範囲が交差する点の軌跡を特定する手段をさらに備えることが好ましい。
【0008】
上記の路面画像処理システムによれば、車両が旋回して走行した場合であっても、第1ラインカメラの画像系列と第2ラインカメラの画像系列から、第1視野範囲と第2視野範囲が交差する点の軌跡を特定し、車両の走行軌道を特定することができる。
【0009】
上記の路面画像処理システムは、第1ラインカメラおよび/または第2ラインカメラが撮影した画像系列と、第1視野範囲と第2視野範囲が交差する点の軌跡に基づいて、路面の全体画像を生成する手段をさらに備えることが好ましい。
【0010】
上記の路面画像処理システムによれば、車両が旋回して走行した場合であっても、路面の全体画像を正確に生成することができる。
【0011】
本発明は方法として具現化することもできる。その方法は、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段を備える路面画像撮影装置で撮影された路面の画像を処理する方法である。その方法は、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する工程と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する工程を備えている。
【0012】
上記の方法は、車両の走行距離に応じた第1視野範囲と第2視野範囲が交差する点の進行方向に基づいて、第1視野範囲と第2視野範囲が交差する点の軌跡を特定する工程をさらに備えることが好ましい。
【0013】
上記の方法は、第1ラインカメラおよび/または第2ラインカメラが撮影した画像系列と、第1視野範囲と第2視野範囲が交差する点の軌跡に基づいて、路面の全体画像を生成する工程をさらに備えることが好ましい。
【発明の効果】
【0014】
本発明の路面画像処理システムによれば、ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することができる。
【図面の簡単な説明】
【0015】
【図1】路面画像処理システム10の概略側面図。
【図2】路面画像処理システム10の概略上面図。
【図3】全体画像生成処理を示すフローチャート。
【図4】車両12が旋回走行する際の、車両12の進行方向N1と、ラインカメラ14,16の進行方向N2と、左側後輪18aの進行方向N3を示す図。
【図5】ラインカメラ14,16の画像系列から、ラインカメラ14,16の進行方向N2を特定する原理を示す図。
【図6】軌跡Tの更新処理と、全体路面画像Sの更新処理を示す図。
【図7】路面画像処理システム100の概略上面図。
【発明を実施するための形態】
【0016】
図1は、実施例に係る路面画像処理システム10の概略側面図を示しており、図2は路面画像処理システム10の概略上面図を示している。図1、2に示すように、路面画像処理システム10は、車両12と、ラインカメラ14と、ラインカメラ16と、エンコーダ18と、記憶装置20と、制御装置22を有している。
【0017】
車両12は、ワンボックスカーを測定用に改造したものである。車両12の上部には、車両12から後方に突出する支持体24が設置されている。ラインカメラ14とラインカメラ16は、支持体24によって、車両12の後方上部に固定されている。ラインカメラ14とラインカメラ16は、真下に向けて固定されている。ラインカメラ14、16は、大きさ10μm×10μmの撮像素子(CCD、CMOS等)が1本のライン状に多数(約2000個)配列された撮像素子ユニットを内蔵しており、レンズを通して撮像素子群の大きさが投影された視野範囲内を撮影する。なお、個々の撮像素子の視野範囲の大きさは路面までの距離に応じて異なるものとなるが、1つの撮像素子の視野範囲に対して1つの出力値が定まるので、各撮像素子の出力値は、その視野範囲内での明るさの平均値、あるいは、視野範囲の中心点の明るさとみなすことができる。ラインカメラ14、16は、真下に向けて路面を撮影する。
【0018】
図2の範囲60は、ラインカメラ14の視野範囲を示している。ラインカメラ14は、視野範囲60内の路面を撮影する。図2に示すように、視野範囲60は、車両12の前方方向FWDに対して角度φ1だけ傾斜した方向に長く伸びている。視野範囲60の長手方向の長さは約1700mmであり、視野範囲60の短手方向の長さは約1mmである。
【0019】
図2の範囲62は、ラインカメラ16の視野範囲を示している。ラインカメラ16は、視野範囲62内の路面を撮影する。図2に示すように、視野範囲62は、車両12の前方方向FWDに対して、視野範囲60と反対側に角度φ2だけ傾斜した方向に長く伸びている。視野範囲62の長手方向の長さは約1700mmであり、視野範囲60の短手方向の長さは約1mmである。
【0020】
ラインカメラ14、16は、視野範囲60と視野範囲62が交差してX字を形成するように配置されている。視野範囲60と視野範囲62が交差する位置は各カメラのレンズの大きさ分だけ各視野範囲の中心からずれているが、シフトレンズを用いることで、視野範囲の中心にシフトすることができる。従って、以下では視野範囲60と視野範囲62が中央で交差しているとして説明する。
【0021】
ラインカメラ14とラインカメラ16は、同一の路面を撮影している。したがって、ラインカメラ14の視野範囲60が通過する範囲とラインカメラ16の視野範囲62が通過する範囲が重複する箇所については、ラインカメラ14により撮影した画像とラインカメラ16により撮影した画像の双方に同一の被写体が写り込む。
【0022】
エンコーダ18は車両12の左側後輪18aに取り付けられており、左側後輪18aの回転数を検出する。エンコーダ18は、左側後輪18aの回転を検出することで、車両12の走行距離を検出する。本実施例では、エンコーダ18は、車両12が0.3mm走行する毎にパルスを出力する。
【0023】
記憶装置20は、制御装置22に接続されている。記憶装置20は、ラインカメラ14、16によって撮影された画像等を記憶する。
【0024】
制御装置22には、ラインカメラ14、16、エンコーダ18、記憶装置20が接続されている。制御装置22は、ラインカメラ14、16及び記憶装置20の動作を制御する。制御装置22には、エンコーダ18から上述したパルスが入力される。制御装置22は、1パルスが入力される毎(すなわち、車両12が0.3mm走行する毎)に、ラインカメラ14、16で撮影を行う。制御装置22は、撮影した画像をその撮影順序と共に記憶装置20に記憶させる。また、制御装置22は、エンコーダ18から1000パルスが入力される毎(すなわち、車両が300mm進む毎)に、図3に示す全体画像生成処理を実行する。全体画像生成処理の実行中においても、ラインカメラ14、16は1パルス毎に画像を撮影している。全体画像生成処理の実行中に撮影された画像は、次の全体画像生成処理に使用される。
【0025】
上述したように、ラインカメラ14、16は1パルス毎に路面を撮影し、制御装置22は1000パルス毎に全体画像生成処理を実行する。したがって、制御装置22が全体画像生成処理を開始する時点では、ラインカメラ14により1000個の画像が得られており、ラインカメラ16によって1000個の画像が得られている。以下ではラインカメラ14により得られた1000個の画像をラインカメラ14の画像系列といい、ラインカメラ16により得られた1000個の画像をラインカメラ16の画像系列という。
【0026】
図3のステップS2では、ラインカメラ14、16の画像系列に基づいて、ラインカメラ14,16の視野範囲60,62の中央点が移動した軌跡の曲率半径rの算出を行う。以下では、ラインカメラ14、16の画像系列に基づいて、曲率半径rを算出する原理について説明する。
【0027】
図4は、車両12が旋回走行する際の、車両12の進行方向N1と、ラインカメラ14,16の進行方向N2と、左側後輪18aの進行方向N3を示している。なお、ここでいう車両12の進行方向N1とは、車両12の左右の後輪の中心点の進行方向を意味し、また、ラインカメラ14,16の進行方向N2とは、ラインカメラ14,16の視野範囲60,62の中央点の進行方向を意味する。ここでは、車両12の左右の後輪の中心点が移動した軌跡の曲率中心と、ラインカメラ14,16の視野範囲60,62の中央点の軌跡の曲率中心と、左側後輪18aの軌跡の曲率中心が、すべて一致していると仮定する。車両12が旋回走行する際には、車両12の進行方向N1は車両12の左右の後輪の中心点が移動した軌跡の接線方向に沿うものとなる。車両12の左側後輪18aの進行方向N3も、車両12の進行方向N1と同様となる。しかしながら、ラインカメラ14,16は、左側後輪18aから後方に距離Lだけオフセットした位置で車両12に対して固定されているから、ラインカメラ14,16の進行方向N2は車両12の進行方向N1から傾斜角度δだけ傾斜する。この傾斜角度δは、以下の数式で表現される。
【0028】
【数1】
【0029】
従って、ラインカメラ14,16の画像系列に基づいてラインカメラ14,16の進行方向N2を特定することができれば、車両12の進行方向N1に対するラインカメラ14,16の進行方向N2の傾斜角度δを特定することができ、車両12の前後方向に沿った車両12の左側後輪18aからラインカメラ14,16の視野範囲60,62の中央点までの距離Lと傾斜角度δから、曲率半径rを特定することができる。
【0030】
図5は、ラインカメラ14,16の画像系列から、ラインカメラ14,16の進行方向N2を特定する原理を示している。図5では、正方形の模様が付された路面を、路面画像処理システム10で撮影した場合を示している。図5の(a)、(b)に示すように、ラインカメラ14,16の画像系列を順に配列した場合、ラインカメラ14,16の視野範囲60,62が進行方向に対して傾いているので、実際の被写体に比べて傾いた画像が生成される。また、ラインカメラ14,16の視野範囲60,62が進行方向に対して傾いているので、ラインカメラ14,16の撮影ピッチは、撮影から撮影までの間に車両12が走行した距離(すなわち0.3mm)とは相違し、ラインカメラ14,16の画像系列を順に配列した場合、実際の被写体とは伸縮が異なる画像が生成される。このような画像の傾きと伸縮については、アフィン変換を施すことで修正することができる。画像のピクセルの位置を(x,y)とし、傾きの修正量をθ、伸縮の修正量をβとした場合、アフィン変換後のピクセルの位置(x’,y’)は以下の数式で与えられる。
【0031】
【数2】
【0032】
ラインカメラ14とラインカメラ16が同一の被写体を撮像した場合、図5の(a)に示すラインカメラ14の画像系列に適切なアフィン変換を施して得られる図5の(c)の画像と、図5の(b)に示すラインカメラ16の画像系列に適切なアフィン変換を施して得られる図5の(d)の画像は、視野範囲が重複する範囲では画像が一致するはずである。そこで、本実施例では、パラメータθ1、β1、θ2、β2を仮定して、ラインカメラ14が撮影した画像系列のアフィン変換後の画像と、ラインカメラ16が撮影した画像系列のアフィン変換後の画像について一致度の計算を行う。そして、パラメータθ1、β1、θ2、β2の値を様々に変化させながら一致度の計算を繰り返し行い、最も高い一致度を与えるアフィン変換のパラメータθ1、β1、θ2、β2を探索する。
【0033】
すなわち、図5の(a)に示すラインカメラ14の画像系列については、以下に示すアフィン変換を行って、図5の(c)に示す画像を生成する。
【0034】
【数3】
【0035】
また、図5の(b)に示すラインカメラ16の画像系列については、以下に示すアフィン変換を行って、図5の(d)に示す画像を生成する。
【0036】
【数4】
【0037】
そして、図5の(c)に示すアフィン変換後のラインカメラ14の画像と、図5の(d)に示すアフィン変換後のラインカメラ16の画像について、重複部分の一致度を算出する。
【0038】
上記の一致度の算出を、パラメータθ1、β1、θ2、β2の値を様々に変化させながら繰り返し行い、最も高い一致度を与えるパラメータθ1、β1、θ2、β2の組み合わせを探索する。
【0039】
なお、画像の傾きの修正量θ1、θ2については、ラインカメラ14,16の進行方向N2の車両12の進行方向N1からの傾斜角度δ(図4参照)と、ラインカメラ14の車両12に対する取付角度φ1(図2参照)と、ラインカメラ16の車両12に対する取付角度φ2(図2参照)との間に、以下の関係式が成り立つ。
【0040】
【数5】
【0041】
従って、ラインカメラ14,16の車両12に対する取付角度φ1、φ2が測定等により取得されている場合には、ラインカメラ14,16の進行方向N2の車両12の進行方向N1からの傾斜角度δを探索することで、上記の関係式からθ1、θ2を特定することができる。探索すべきパラメータの個数を減らして、計算負荷を低減することができる。
【0042】
また、画像の伸縮の修正量β1、β2については、車両12が直進する際の伸縮の修正量β10、β20との間に、以下の関係式が成り立つ。
【0043】
【数6】
【0044】
ここで、Rは車両12の左側後輪18aが移動した軌跡の曲率半径、Wは車両12の左右方向に沿った車両12の左側後輪18aからラインカメラ14,16の中央点までの距離である(図4参照)。従って、車両12が直進する際の伸縮の修正量β10、β20が測定等により取得されている場合には、ラインカメラ14,16の進行方向N2の車両12の進行方向N1からの傾斜角度δを探索することで、上記の関係式からβ1、β2を特定することができる。探索すべきパラメータの個数を減らして、計算負荷を低減することができる。
【0045】
なお、画像の一致度の算出処理において、一致する被写体を探索する範囲の大きさは、曲率半径rに比べて非常に小さい。従って、この範囲においては、視野範囲60,62は並進移動しているとみなしてよく、ラインカメラ14,16の画像系列の間隔は平行とみなしてよい。このため、上記したβ1、β2はほぼ同じと仮定して上記の演算を行ってもよい。このような仮定をおくと、探索すべきパラメータの個数を減らして、計算負荷を低減することができる。
【0046】
以上のように、本実施例では、探索すべきパラメータは、ラインカメラ14,16の進行方向N2の車両12の進行方向N1からの傾斜角度δの1つとなる。探索するパラメータの個数を減らして、計算負荷を低減することができる。
【0047】
なお、上記では、車両の進行方向N1と左側後輪18aの進行方向N3が一致すると仮定できる場合について説明したが、両者が一致しない場合には、以下の関係式を用いることができる。
【0048】
【数7】
【0049】
この場合、探索すべきパラメータは、ラインカメラ14,16の進行方向N2の車両12の進行方向N1からの傾斜角度δと、車両12の左側後輪18aが移動した軌跡の曲率半径Rの2つである。
【0050】
車両12の進行方向N1に対するラインカメラ14,16の進行方向N2の傾斜角度δが特定されると、ラインカメラ14,16の中央点が移動した軌跡の曲率半径rを算出することができる。
【0051】
図3のステップS4では、ステップS2において算出された曲率半径rに基づいて、車両12から見た曲率中心cの位置を特定する。
【0052】
ステップS6では、ラインカメラ14,16の視野範囲60,62の中央点が移動した軌跡Tの更新処理を行う。図6に示すように、ステップS6では、前回までの全体路面画像生成処理で取得されている軌跡Tの端部に、ステップS2で特定された曲率半径rとステップS4で特定された曲率中心cに基づく円弧状の軌跡ΔTを新たに追加することで、ラインカメラ14,16の視野範囲60,62の中央点が移動した軌跡Tを更新する。
【0053】
ステップS8では、全体路面画像Sの更新処理を行う。図6に示すように、ステップS8では、前回までの全体路面画像生成処理で生成されている全体路面画像Sに、新たな路面画像ΔSを貼り合わせることによって、全体路面画像を更新する。新たな路面画像ΔSを貼り合わせる際の位置および角度は、ステップS6で更新された軌跡Tに基づいて特定される。新たな路面画像ΔSとしては、ラインカメラ14の画像系列をアフィン変換した画像を用いてもよいし、ラインカメラ16の画像系列をアフィン変換した画像を用いてもよいし、両者を組み合わせた画像を用いてもよい。
【0054】
なお上記ではラインカメラ14,16の視野範囲60,62が交差する中央点の位置が車両12に対して変化しないものとして演算を行っているが、視野範囲60,62が交差する中央点の車両12に対する位置を正規化相関によって毎回算出してもよい。
【0055】
この路面画像処理システム10では、車両12がカーブする路面を走行する場合でも、その路面全体の画像を正確に生成することができる。また、上述したラインカメラ14、16は、エリアカメラに比べて極めて短い周期で路面を撮影することができる。したがって、路面画像処理システム10は、高速で走行しながら路面の画像を生成することができる。
【0056】
また、上述した実施例では、路面を撮影しながら路面全体の画像を生成する路面画像処理システム10について説明したが、路面の撮影と上述した全体画像生成処理を必ずしも同時進行で行う必要はない。例えば、路面の撮影を行って記憶装置20に撮影した画像とその順序を示すデータを記憶させておき、その後に記憶させたデータを別の計算機に移して、その計算機で全体画像生成処理を行ってもよい。また、路面を撮影しながら、撮影した画像とその撮影順序を示すデータを無線により外部の計算機に送信し、外部の計算機で全体画像生成処理を行ってもよい。
【0057】
なお、図6に示すように隣接する画像同士が重複する場合は、重複する中の1つの画像を優先表示するようにして画像を生成してもよいし、重複する画像を平均化する等した画像を表示するようにしてもよい。
【0058】
上記の実施例では、ラインカメラ14とラインカメラ16が車両12の後方に固定されており、車両12の後方の路面を撮影する構成について説明したが、ラインカメラ14とラインカメラ16を車両12の前方に固定し、車両12の前方の路面を撮影する構成としてもよい。
【0059】
上記の実施例では、エンコーダ18が車両12の左側後輪18aの回転数を検出する場合について説明したが、エンコーダ18は車両12の右側後輪の回転数を検出する構成としてもよい。あるいは、ラインカメラ14とラインカメラ16の中央点の近傍に走行距離の計測用の車輪を別途設けて、その車輪の回転数をエンコーダ18で検出する構成としてもよい。
【0060】
上記の実施例では、車両12に一組のラインカメラ14、16を搭載する場合について説明したが、図7に示す路面画像処理システム100のように、もう一組のラインカメラ114,116を支持体124を介して車両12に搭載してもよい。この場合、ラインカメラ114は視野範囲162を撮影し、ラインカメラ116は視野範囲160を撮影する。路面画像処理システム100を用いることで、車両12が旋回走行する際の曲率中心と曲率半径を特定することができる。
【0061】
以上、本発明の具体例を詳細に説明したが、これらは例示に過ぎず、特許請求の範囲を限定するものではない。特許請求の範囲に記載の技術には、以上に例示した具体例を様々に変形、変更したものが含まれる。本明細書または図面に説明した技術要素は、単独であるいは各種の組合せによって技術的有用性を発揮するものであり、出願時請求項記載の組合せに限定されるものではない。また、本明細書または図面に例示した技術は複数目的を同時に達成し得るものであり、そのうちの一つの目的を達成すること自体で技術的有用性を持つものである。
【符号の説明】
【0062】
10:路面画像処理システム
12:車両
14:ラインカメラ
16:ラインカメラ
18:エンコーダ
18a:左側後輪
20:記憶装置
22:制御装置
24:支持体
60:視野範囲
62:視野範囲
100:路面画像処理システム
114:ラインカメラ
116:ラインカメラ
124:支持体
160:視野範囲
162:視野範囲
【特許請求の範囲】
【請求項1】
車両と、
車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、
車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、
車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、
第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、
探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えることを特徴とする路面画像処理システム。
【請求項2】
車両の走行距離に応じた第1視野範囲と第2視野範囲が交差する点の進行方向に基づいて、第1視野範囲と第2視野範囲が交差する点の軌跡を特定する手段をさらに備える請求項1の路面画像処理システム。
【請求項3】
第1ラインカメラおよび/または第2ラインカメラが撮影した画像系列と、第1視野範囲と第2視野範囲が交差する点の軌跡に基づいて、路面の全体画像を生成する手段をさらに備える請求項2の路面画像処理システム。
【請求項4】
車両と、
車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、
車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、
車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段を備える路面画像撮影装置で撮影された路面の画像を処理する方法であって、
第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する工程と、
探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する工程を備えることを特徴とする路面画像処理方法。
【請求項5】
車両の走行距離に応じた第1視野範囲と第2視野範囲が交差する点の進行方向に基づいて、第1視野範囲と第2視野範囲が交差する点の軌跡を特定する工程をさらに備える請求項4の路面画像処理方法。
【請求項6】
第1ラインカメラおよび/または第2ラインカメラが撮影した画像系列と、第1視野範囲と第2視野範囲が交差する点の軌跡に基づいて、路面の全体画像を生成する工程をさらに備える請求項5の路面画像処理方法。
【請求項1】
車両と、
車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、
車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、
車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、
第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、
探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えることを特徴とする路面画像処理システム。
【請求項2】
車両の走行距離に応じた第1視野範囲と第2視野範囲が交差する点の進行方向に基づいて、第1視野範囲と第2視野範囲が交差する点の軌跡を特定する手段をさらに備える請求項1の路面画像処理システム。
【請求項3】
第1ラインカメラおよび/または第2ラインカメラが撮影した画像系列と、第1視野範囲と第2視野範囲が交差する点の軌跡に基づいて、路面の全体画像を生成する手段をさらに備える請求項2の路面画像処理システム。
【請求項4】
車両と、
車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、
車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、
車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段を備える路面画像撮影装置で撮影された路面の画像を処理する方法であって、
第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する工程と、
探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する工程を備えることを特徴とする路面画像処理方法。
【請求項5】
車両の走行距離に応じた第1視野範囲と第2視野範囲が交差する点の進行方向に基づいて、第1視野範囲と第2視野範囲が交差する点の軌跡を特定する工程をさらに備える請求項4の路面画像処理方法。
【請求項6】
第1ラインカメラおよび/または第2ラインカメラが撮影した画像系列と、第1視野範囲と第2視野範囲が交差する点の軌跡に基づいて、路面の全体画像を生成する工程をさらに備える請求項5の路面画像処理方法。
【図1】

【図2】

【図3】
【図4】

【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−2998(P2013−2998A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−135185(P2011−135185)
【出願日】平成23年6月17日(2011.6.17)
【出願人】(591270556)名古屋市 (77)
【出願人】(599137828)株式会社 サンウェイ (15)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月17日(2011.6.17)
【出願人】(591270556)名古屋市 (77)
【出願人】(599137828)株式会社 サンウェイ (15)
【Fターム(参考)】
[ Back to top ]