
路面監視装置,サスペンション制御装置
【課題】車両の姿勢に関わらず路面状況を正確に検出可能な監視装置、及びその監視結果を利用するサスペンション制御装置を提供する。
【解決手段】レーザー光で路面をスキャンした測定結果から、レーザー光を反射した地点をセンサ座標で表した検出位置情報(XL,YL,ZL)を生成し、各種センサの検出結果から車両の移動距離D,路面傾斜角θx,θyを算出する(S110〜S140)。これら算出結果から、車両の移動距離,移動方向を表す移動ベクトル(ΔX,ΔY,ΔZ)を求めると共に、検出位置情報を、車両基準座標の原点からの相対的な位置関係を示す相対位置ベクトル(XP,YP,ZP)に変換し、これら移動ベクトル及び相対位置ベクトルを、前回の監視タイミングにおける車両基準座標系の原点を絶対座標系で表した位置(Xr,Yr,Zr)に加算することで、レーザー光の反射地点の位置を絶対座標系で示した反射地点情報(X,Y,Z)を算出する(S150〜S170)。
【解決手段】レーザー光で路面をスキャンした測定結果から、レーザー光を反射した地点をセンサ座標で表した検出位置情報(XL,YL,ZL)を生成し、各種センサの検出結果から車両の移動距離D,路面傾斜角θx,θyを算出する(S110〜S140)。これら算出結果から、車両の移動距離,移動方向を表す移動ベクトル(ΔX,ΔY,ΔZ)を求めると共に、検出位置情報を、車両基準座標の原点からの相対的な位置関係を示す相対位置ベクトル(XP,YP,ZP)に変換し、これら移動ベクトル及び相対位置ベクトルを、前回の監視タイミングにおける車両基準座標系の原点を絶対座標系で表した位置(Xr,Yr,Zr)に加算することで、レーザー光の反射地点の位置を絶対座標系で示した反射地点情報(X,Y,Z)を算出する(S150〜S170)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両周囲の路面状況(路面の凹凸や路面上の障害物)を監視する路面監視装置、及びその監視結果を利用するサスペンション制御装置に関する。
【背景技術】
【0002】
従来より、車両周囲の状況を画面に表示することにより、運転者に周囲の状況を把握させ、運転者に的確な操作を行わせるための監視装置が知られている。
その一つとして、ビームの方向が固定された複数のレーザーレーダを車体周囲に設置し、その複数のレーザーレーダでの検出結果、即ち、レーザー光を反射する障害物との相対的な位置関係を表す位置データを、車速やステアリング角から求めた車両移動量分だけ補正しながら逐次蓄積し、その蓄積したデータに基づいて車両の周囲の状況を示す地図データを合成,表示(鳥瞰図表示)する装置が知られている(例えば特許文献1参照)。
【特許文献1】特開平07−248382号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、この従来装置では、路面の形状(勾配の変化)や車両の姿勢によっては、路面に形成された凹凸や路上に存在する障害物の形状を正しく検出することができない場合があるという問題があった。
【0004】
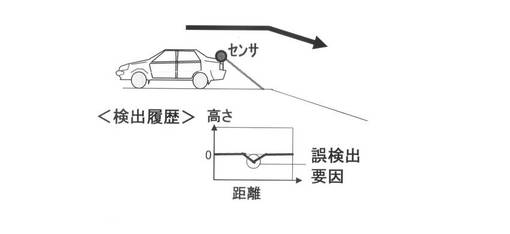
即ち、従来装置は、レーザーレーダとレーザー光の反射地点(障害物や路面)との相対的な位置関係を検出するものであり、路面が平坦であり且つ車両の姿勢が水平であることを前提としたものとなる。従って、例えば、図11(a)に示すように、車両が、勾配が変化する路面を走行しながら路面を監視する場合、勾配が変化する地点を通過する時に、路面の勾配に対する車両の姿勢が変化することによって、図11(b)に示すように、路面に窪みがあるかのように誤検出されてしまうのである。
【0005】
また、路面に凹凸がある場合、従来装置のような鳥瞰図表示では、凹部なのか凸部なのか、また、その深さや高さ等を運転者に直感的に把握させることが困難であるという問題もあった。
【0006】
特に、車両が電動車椅子や1人乗り小型モビリティ等であった場合には、重心が高く車体が軽いため、路面の凹凸や路上の障害物を正しく検出できないと、バランスを崩して横転してしまう危険性があるため、この問題はより切実である。
【0007】
本発明は、上記問題点を解決するために、車両の姿勢に関わらず路面状況を正確に検出可能な監視装置、及びその監視結果を利用するサスペンション制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するためになされた発明である請求項1に記載の路面監視装置では、位置情報検出手段が、予め設定された監視タイミング毎に、自車両の進行方向を横切る方向に沿って走査しながら路面に向けて探査波を照射すると共に該探査波の反射波を受信する送受信部からの受信信号に基づき、探査波を反射した地点の位置を、送受信部の設置位置を基準点として三次元的に示した検出位置情報を求める。また、状態情報検出手段が、自車両の走行状態及び姿勢を表す車両状態情報を検出する。
【0009】
すると、ベクトル算出手段が、状態情報検出手段で検出された車両状態情報に基づいて、自車両の移動距離及び移動方向を示した三次元ベクトルである移動ベクトルを求め、変換手段が、自車両と一体に移動し且つ自車両の姿勢に対して不動な位置を基準位置として、位置情報検出手段で検出された検出位置情報を、状態情報検出手段で検出された車両状態情報及び送受信部の設置状況を表す設置情報に基づいて、基準位置に対する相対的な位置関係を示した三次元ベクトルである相対位置ベクトルに変換する。
【0010】
そして、蓄積手段が、ベクトル算出手段にて算出された移動ベクトル及び変換手段にて変換された相対位置ベクトルを、前回の監視タイミングでの基準位置に加算することで、最初の監視タイミングでの基準位置との相対的な位置関係を表す反射地点情報を算出して蓄積する。
【0011】
このように本発明の路面監視装置では、路面や路面上の障害物についての検出結果が車両の姿勢に応じて変化する検出位置情報をそのまま使用するのではなく、車両の姿勢の影響を受けない基準位置からの相対位置ベクトルに変換し、更に、自車両(即ち基準位置)の軌跡を表す移動ベクトルを用いて反射地点情報(最初の監視タイミングでの基準位置との相対的な位置関係を表す)に変換して蓄積している。
【0012】
従って、本発明の路面監視装置によれば、監視タイミング毎に変化しない固定された座標系で反射地点情報が表されるため、この反射地点情報を用いることによって、車両の姿勢に関わらず路面状況(形状)や路上の障害物を正確に検出することができる。
【0013】
請求項2に記載の路面監視装置では、凹凸境界検出手段が、蓄積手段にて蓄積された反射地点情報に基づいて、自車両の移動方向に沿った高さの変化量の絶対値が予め設定された閾値以上となる部位を、凹凸部位の境界として検出する。
【0014】
このように構成された本発明の路面監視装置によれば、路面に存在する段差等の位置を精度よく検出することができる。
なお、蓄積手段は、請求項3に記載のように、最初の監視タイミングでの基準位置を含んだ基準面を格子状に分割してなる分割領域を設定し、反射地点情報を、その分割領域における基準面からの高さとして蓄積することが望ましい。
【0015】
この場合、凹凸検出手段は、隣接する分割領域の値(高さ)を比較することで、凹凸部位を簡単に検出することができる。
また、探査波は、所望の分解能で走査できるものであれば、電波や音波などを用いてもよいが、請求項4に記載のように、指向性の高いビームを容易に実現可能なレーザー光を用いることが望ましい。
【0016】
次に、請求項5に記載の路面監視装置では、表示手段が、蓄積手段によって蓄積された反射地点情報に基づいて生成される自車両の周囲の状況を表す画像に、自車両を表す画像を重畳して表示する。
【0017】
このように構成された本発明の路面監視装置によれば、検出した路面状況(形状)を、運転者に直感的に把握させることができる。
更に、表示手段は、請求項6に記載のように、サイドビューで表示するように構成されていてもよいし、請求項7に記載のように、鳥瞰図で表示するように構成されていてもよい。
【0018】
特に、サイドビュー表示では、高さ方向のサイズを運転者に把握させることができるため、例えば、路面から突出した障害物が車体と接触する高さであるか否か、障害物が駐車場のパーキングロットである場合に車輪と接触しない距離であるか否か、凸部や凹部によって生じる段差が乗り越え可能な高さであるか否か等を、運転者に的確に判断させることができる。
【0019】
ところで、状態情報検出手段が、自車両の姿勢を検出するセンサとして、車体の前後左右への傾斜角を検出する傾斜角センサを少なくとも備えている場合、その傾斜角センサは、請求項8に記載のように、送受信部と一体に構成されていることが望ましい。
【0020】
この場合、システムを構成する際に配線数を低減できる。
また、状態情報検出手段は、自車両の姿勢を検出するセンサとして、例えば、請求項9に記載のように、車輪毎に設けられたハイトセンサを用いてもよい。
【0021】
次に、請求項10に記載の発明は、アクティブサスペンションを備えた車両に搭載されるサスペンション制御装置であって、請求項1乃至請求項9のいずれかに記載の路面監視装置と、車両姿勢が常にフラットになるように、路面監視装置での検出結果に基づいて、アクティブサスペンションの制動量を算出する制御量算出手段とを備えることを特徴とする。
【0022】
この場合、路面監視装置によって路面状況が精度よく検出されるため、アクティブサスペンションの制御量の算出、ひいては車両姿勢の制御を精度よく行うことができる。
【発明を実施するための最良の形態】
【0023】
以下に本発明の実施形態を図面と共に説明する。
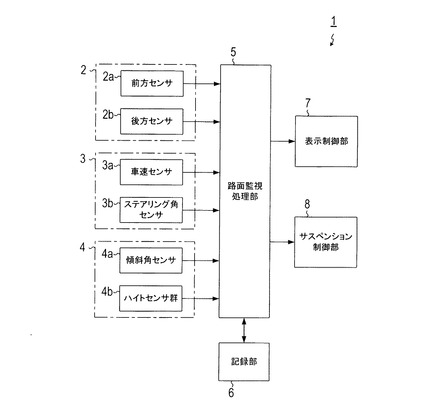
図1は、サスペンション特性を電子制御によって変更可能なアクティブサスペンションを搭載する車両に設置され、路面の状況を監視すると共に、監視結果に基づいてサスペンション特性を制御するサスペンション制御装置1の構成を示すブロック図である。
【0024】
[全体構成]
図1に示すように、サスペンション制御装置1は、車両前方の路面の状況を検出する前方センサ2a,車両後方の路面の状況を検出する後方センサ2bからなる周囲状況獲得センサ群2と、車速センサ3a,ステアリング角センサ3bを少なくとも含み車両の走行状態に関する情報(以下「走行情報」という)を獲得するための走行情報獲得センサ群3と、水平面(重力方向と直交する面)に対する傾斜角α(ロール角αx,ピッチ角αy)を検出する傾斜角センサ4a、自車両の各車輪に設けられ、各車輪上における路面からのシャーシの高さ(車高)を検出するハイトセンサ群4bを少なくとも含み車両の姿勢に関する情報(以下「姿勢情報」という)を獲得するための姿勢情報獲得センサ群4とを備えている。
【0025】
このうち、周囲状況獲得センサ群2を構成する前方センサ2a,後方センサ2bは、いずれも、レーザー光を照射してその反射光を受光するまでの時間を測定することにより、レーザー光を反射した地点までの距離を測定するレーザーレーダからなり、予め設定された角度範囲を一次元的に走査するように構成されている。
【0026】
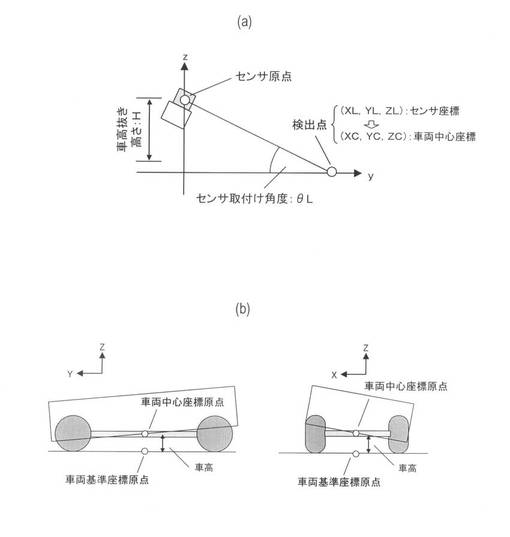
また、前方センサ2a,後方センサ2bは、図6(a)に示すように、レーザー光が路面に向けて照射されるように斜め下向きに取り付けられており、以下では、そのレーザー光の照射方向と水平面とが成す角度をセンサ取付角度θLという。また、前方センサ2a,後方センサ2bの車高(路面からシャーシまでの高さ)分を除いた取付高さをHで表すものとする。
【0027】
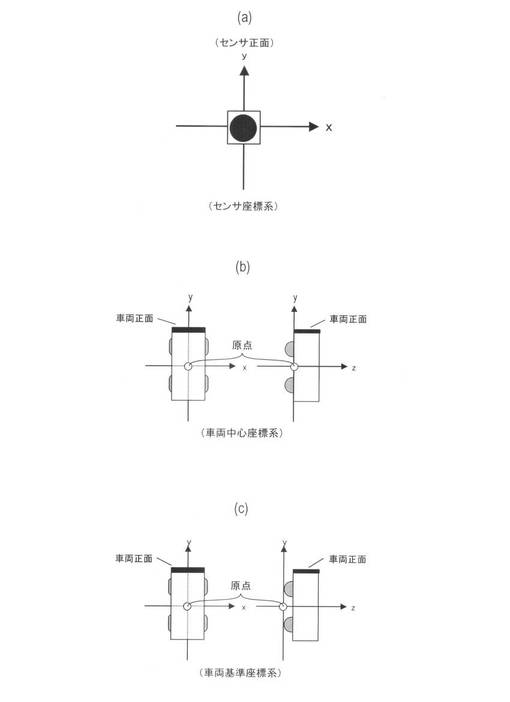
そして、前方センサ2a,及び後方センサ2bにより測定される距離及び照射方向から算出される検出位置情報は、センサの取付位置(レーザー光が照射され、反射光が受光される地点)を原点とするセンサ座標系で表される。このセンサ座標系は、具体的には、図3(a)に示すように、センサ2の正面方向(レーザー光の走査範囲の中心方向)をy軸、y軸に直交した水平方向をx軸、x軸,y軸のいずれにも直交する方向をz軸とするものであり、x軸が車幅方向と一致するように車両に設置されている。
【0028】
なお、前方センサ2a,後方センサ2bは、外見上目立たないように取り付けることが望ましく、例えば、リアウインドウの上部に庇を有する車両であれば、その庇の中に後方センサ2bを埋め込むことが望ましい。
【0029】
また、サスペンション制御装置1は、CPU,ROM,RAMを備えた周知のマイクロコンピュータを中心に構成され、センサ群2,3,4からの検出結果に基づいて路面の状況(路面形状)を検出する処理を実行する路面監視処理部5と、路面監視処理部5によって生成される履歴マップ(後述する)を記録する記録部6と、記録部6に記録された履歴マップの内容等を、車両に設置されたモニタ(図示せず)に表示する表示制御部7と、路面監視処理部5での検出結果に従ってアクティブサスペンション(図示せず)の特性を制御するサスペンション制御部8とを備えている。
【0030】
[路面監視処理部]
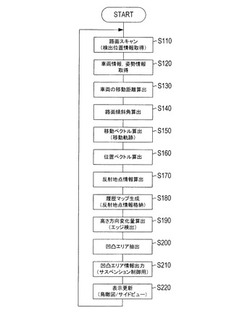
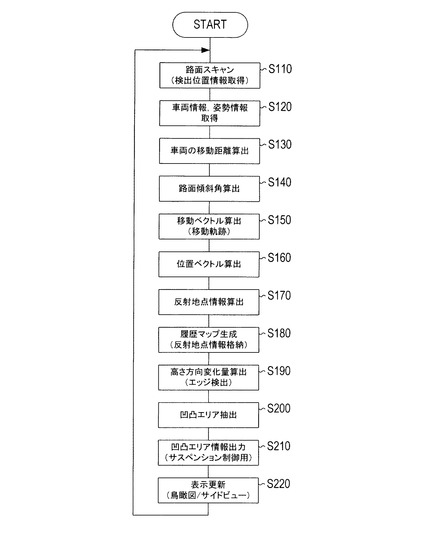
ここで、路面監視処理部5が実行する処理を、図2に示すフローチャートに沿って詳述する。なお、本処理は、車両のイグニションスイッチをオンにすると、予め設定された一定間隔ΔT(例えば50ms)の監視タイミング毎に、繰り返し実行される。
【0031】
但し、自車両のトランスミッションが後進ギアに設定されている場合は、後方センサ2bでの検出結果が用いられ、それ以外の場合は、前方センサ2aでの検出結果が用いられるものとする。以下の説明では、前方センサ2a,後方センサ2bを特定せず、周囲状況獲得センサ2として説明する。
【0032】
また、以下の説明において、車両中心座標系とは、図3(b)に示すように、車幅方向をx軸、車長方向をy軸、車高方向をz軸として、(x,y,z)=(車幅方向の中心,ホイールベースの中心,車高)で表される車両の中心位置を原点とした座標系であり、また、車両基準座標系とは、図3(c)に示すように、座標の原点が路面上に位置するように、車両中心座標をz軸方向に車高分だけシフトさせた座標系のことである。更に、最初の監視タイミングにおける車両基準座標系の原点を含んだ水平面を基準面、その基準面をX−Y平面とする座標系を絶対座標系と呼ぶものとする。
【0033】
本処理が起動すると、まず、S110では、周囲状況獲得センサ2にレーザー光を照射させることによって路面をスキャンし、その測定結果(距離,照射方向)からレーザー光を反射した地点を、センサ座標で表した検出位置情報(XL,YL,ZL)を求める。ここでセンサは一次元走査のため、ZL=0である。
【0034】
S120では、走行情報獲得センサ群3から走行情報(車速V,ステアリング角θz)を取得すると共に、姿勢情報獲得センサ群4から姿勢情報(傾斜角センサピッチ角αx,傾斜角センサロール角αy,ハイトセンサピッチ角βx,ハイトセンサロール角βy)を取得する。
【0035】
なお、走行情報V,θz、姿勢情報αx,αy,βx,βyは、車両中心座標(車両基準座標でも同様)を用いて表されている。また、ハイトセンサピッチ角βx,ハイトセンサロール角βyは、ハイトセンサ群4bの出力(各車輪の近傍における車高)から、周知の方法を用いて算出する。
【0036】
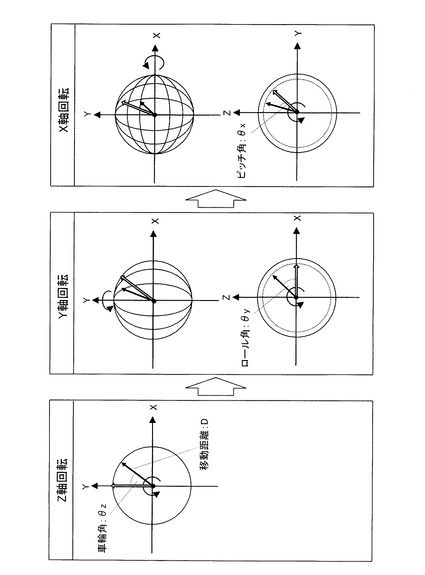
S130では、S120にて取得した走行情報(車速V)と、本処理の起動周期ΔTとに基づき、(1)式を用いて車両の移動距離Dを算出する。
【0037】
【数1】

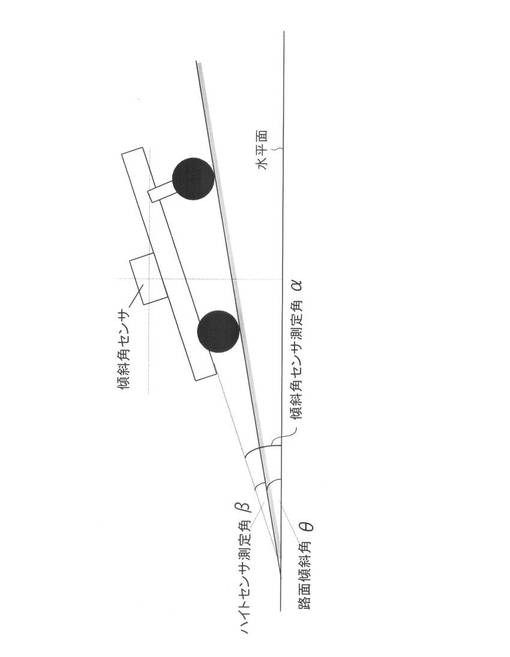
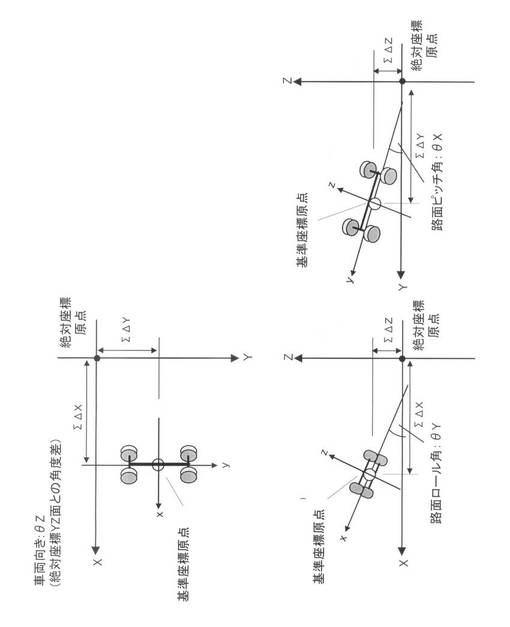
S140では、S120にて取得した姿勢情報αx,αy,βx,βyに基づき、(2)(3)式を用いて路面傾斜角θ(路面ピッチ角θx,路面ロール角θy)を算出する。なお、図4は、姿勢情報である傾斜角センサ測定角α(αx,αy),ハイトセンサ測定角β(βx,βy)と、路面傾斜角θ(θx,θy)との関係を示す説明図である。
【0038】
【数2】
S150では、S130で求めた車両の移動距離D、S140で求めた路面の路面傾斜角θx,θy、S120で取得したステアリング角θzに基づき、(4)式を用いて、車両の移動距離,移動方向を表す移動ベクトル(ΔX,ΔY,ΔZ)を算出する。なお、図5は、移動距離D,ステアリング角θzと、路面ピッチ角θx,路面ロール角θyとの関係を示す説明図である。
【0039】
【数3】
S160では、S110で取得されセンサ座標で示された検出位置情報(XL,YL,ZL)から、車両基準座標の原点からの相対的な位置関係を表す相対位置ベクトル(XP,YP,ZP)を算出する。
【0040】
具体的には、まず(5)〜(7)式を用いて、検出位置情報(XL,YL,ZL)を、車両中心座標で示した第1変換位置ベクトル(XC,YC,ZC)に変換する(図6(a)参照)。但し(5)式は、センサは一次元走査のため、ZL=0の場合の式である。
【0041】
【数4】
次に、この第1変換位置ベクトル(XC,YC,ZC)を、(8)式を用いて、ハイトセンサ測定角βx,βyで表される車体の傾きによる周囲状況獲得センサ2の傾きの影響を補正すると共に、原点の位置を車両中心から路面上にシフトすることで車両基準座標で表した第2変換位置ベクトル(XC’,YC’,ZC’)に変換する(図6(b)参照)。
【0042】
【数5】
更に、この第2変換位置ベクトル(XC’,YC’,ZC’)を、(9)式を用いて、路面傾斜による周囲状況獲得センサ2の傾きの影響を補正することで、相対位置ベクトル(XP,YP,ZP)を求める。
【0043】
【数6】
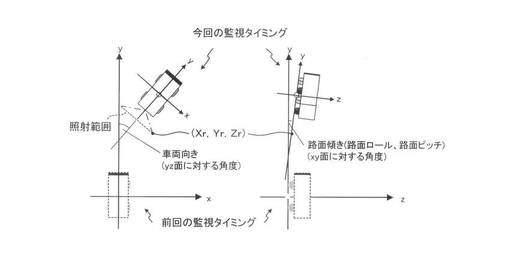
S170では、(10)式に示すように、S150で求めた移動ベクトル(ΔX,ΔY,ΔZ)及びS160で求めた相対位置ベクトル(XP,YP,ZP)を、前回の監視タイミングにおける車両基準座標系の原点を絶対座標系で表した位置(Xr,Yr,Zr)に加算することで、レーザー光を反射した位置を絶対座標系で表した反射地点情報(X,Y,Z)を算出する。これと共に、(11)式に従って、今回の監視タイミングにおける車両基準座標系の原点を絶対座標系で表した位置により、前回位置(Xr,Yr,Zr)を更新する。
【0044】
【数7】
なお、図7は、今回の監視タイミングにおける車両基準座標系と、前記の監視タイミングにおける車両基準座標系との関係を示した説明図であり、図8は、今回の監視タイミングにおける車両基準座標系と絶対座標系との関係を示した説明図である。但し、図中において、ΣΔX,ΣΔY,ΣΔZは、それぞれ、最初の監視タイミングから今回の監視タイミングまでの間に算出された全てのΔX,ΔY,ΔZの累積値を表すものとする。
【0045】
S180では、S170で算出された反射地点情報(X,Y,Z)を、過去の反射地点情報を順次蓄積することで生成され、記録部6に記録されている履歴マップに追加する。
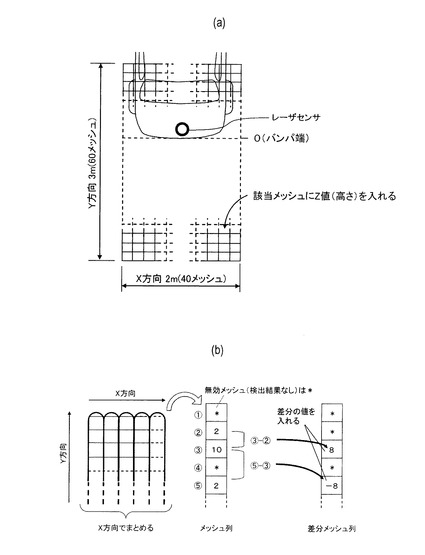
なお、履歴マップは、基準面(絶対座標系のX−Y平面)を、予め設定されたサイズ(ここでは5cm×5cm)で格子状に分割することで設定された複数の分割領域からなる。但し、図9(a)に示すように、車両基準座標系において、X軸方向にレーザー光の照射範囲で規定される幅(ここでは2m)を有し、Y軸方向に予め設定された長さ(ここでは3m)を有した範囲に対応する分割領域(ここでは40×60個)のみが記憶対象となるようにされている。
【0046】
そして、反射地点情報の基準面上での位置(X,Y)に対応する分割領域に反射地点情報の高さを表す値Zを順次格納する。
S190では、履歴マップの記憶内容に基づき、高さ方向の変化量を算出する。
【0047】
具体的には、図9(b)に示すように、車両の移動方向(図ではY方向)に並んだ分割領域群(メッシュ列という)のそれぞれについて、高さを表す値Zが格納されている最も近くに位置する分割領域との間で差分値(図では−dZ/dY)を求める。なお、この差分値は、差分メッシュ列として別途記憶する。
【0048】
S200では、S190で求めた差分値の絶対値が予め設定された閾値より大きいものを抽出すると共に、その抽出した差分値がプラスであれば立上エッジ、マイナスであれば立下エッジとして認識する。更に、同じメッシュ列上で車両に近い側に立上エッジが存在し、車両より遠い位置に立下エッジが存在する領域を凸エリアとして認識し、また、同じメッシュ列上で車両に近い側に立下エッジが存在し、車両より遠い位置に立上エッジが存在する領域を凹エリアとして認識すると共に、複数のメッシュ列に跨る一連の凸エリア又は凹エリアの輪郭等を検出する。
【0049】
S210では、S200での認識結果や検出結果をサスペンション制御部8に出力する。
S220では、S200での認識結果や検出結果、及び履歴マップに基づいて、車両の周囲の状況を鳥瞰図表示するためのデータ、及びサイドビュー表示するためのデータを生成し、これら生成したデータを表示制御部7に出力して、本処理を終了する。
【0050】
なお、S210にて路面監視処理部5からの出力を受けたサスペンション制御部8では、S200での認識結果や検出結果(凹凸エリアの形状やサイズ)に基づき、車両の姿勢が常に水平に保持されるように、サスペンションの特性を制御する。
【0051】
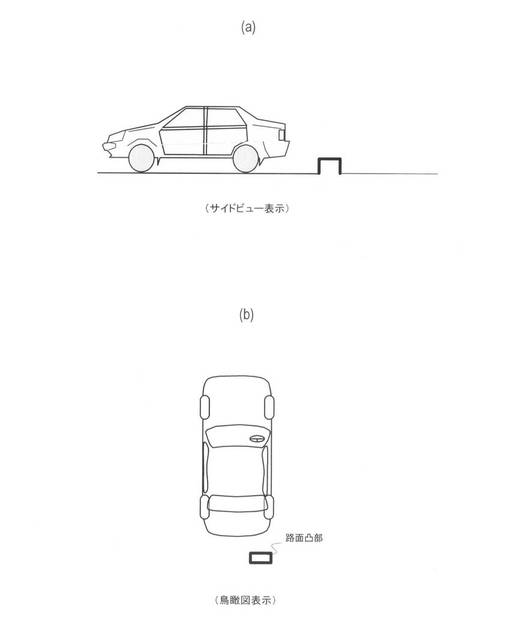
一方、S220にて路面監視処理部5からの出力を受けた表示制御部7では、生成データに従って、車両の周囲の状況を表す鳥瞰図及びサイドビューに、自車両を表す画像を重畳した表示を行う(図10参照)と共に、S200での認識結果に基づき、最寄りの凹凸エリアまでの距離や、その凹凸エリアの高さ,深さ、その凹凸エリアの危険度等の表示も行う。
[効果]
以上説明したように、路面監視処理部5では、路面や路面上の障害物についての検出結果が車両の姿勢に応じて変化する検出位置情報(XL,YL,ZL)をそのまま使用するのではなく、車両の姿勢の影響を受けない基準位置からの相対位置ベクトル(XP,YP,ZP)に変換し、更に、自車両(即ち基準位置)の軌跡を表す移動ベクトル(ΔX,ΔY,ΔZ)を用いて、最初の監視タイミングでの基準位置との相対的な位置関係を表す反射地点情報(X,Y,Z)に変換して蓄積し、その蓄積された反射地点情報を用いて路面上の凹凸部位を検出するようにされている。
【0052】
つまり、本実施形態では、反射地点情報(X,Y,Z)が、監視タイミング毎に変化しない固定された絶対座標系を用いて示されるため、車両の姿勢等に関わらず路面状況(形状)や路上の障害物を正確に検出することができる。
【0053】
また、路面監視処理部5では、反射地点情報(X,Y,Z)を蓄積する際に、履歴マップを用いて、基準面上での位置(X,Y)を表す分割領域毎に、その分割領域での高さを示す情報Zを記憶するように構成されている。
【0054】
従って、立上エッジや立下エッジを検出する際に算出する高さ情報の差分値を、簡易な処理によって求めることができる。
また、表示制御部7では、履歴マップに基づいて生成される自車両の周囲の状況を表す画像に、自車両を表す画像を重畳して表示すると共に、鳥瞰図表示だけでなくサイドビュー表示も行うようにされている。
【0055】
従って、本実施形態によれば、検出した路面状況(形状)や、路面上の凸エリアや凹エリアと自車両との位置関係等を、運転者に直感的に把握させることができる。
[他の実施形態]
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において、様々な態様にて実施することが可能である。
【0056】
例えば、上記実施形態では、自車両として図10に示すような普通四輪自動車を想定しているが、電動車椅子や1人乗り小型モビリティ等であってもよい。これらの車両は重心が高く車体が軽いため、路面の凹凸の影響を受け易く、最悪の場合には横転してしまう可能性がある。そのため、路面状態を正確に把握し、凹凸や障害物を事前に報知したり、車両の姿勢が常に水平に保持されるようにサスペンションの特性を制御したりすることで、横転を回避できる。
【0057】
また、上記実施形態では、路面監視処理部5での処理結果に基づいて、表示制御及びサスペンション制御のいずれも行っているが、いずれか一方だけを実施するように構成してもよい。
【0058】
上記実施形態では、周囲状況獲得センサ群2を構成する前方センサ2a及び後方センサ2bとしてレーザーレーダを用いているが、レーザーレーダの代わり電波センサや超音波センサや、カメラ等の受動式のセンサを用いてもよい。また、これらセンサのうち複数を同時に用いて、検出結果を組み合わせて路面の状況を検出するように構成してもよい。
【0059】
また、上記実施形態では、レーザー光を一次元的に走査するように構成したが、二次元的に走査するように構成してもよい。この場合、一次元的な走査では、移動方向の分解能が車両の移動速度に依存することになるが、二次元的な走査が可能であれば、車両の移動速度によらず、移動方向に対して任意の分解能を実現することができる。
【0060】
上記実施形態では、傾斜角センサ4aの設置位置について特に言及していないが、前方センサ2aや後方センサ2bと一体に形成してもよい。この場合、システムを構成する際に配線数を低減することができる。
【図面の簡単な説明】
【0061】
【図1】サスペンション制御装置の全体構成を示すブロック図。
【図2】路面監視処理部が実行する処理の内容を示すフローチャート。
【図3】処理に使用する座標系を示す説明図。
【図4】傾斜角センサ測定角α,ハイトセンサ測定角βと路面傾斜角θとの関係を示す説明図。
【図5】移動距離D,ステアリング角θzと、路面ピッチ角θx,路面ロール角θyとの関係を示す説明図。
【図6】(a)がセンサ座標と車両中心座標との関係、(b)が車両中心座標と車両基準座標との関係を示す説明図。
【図7】今回の監視タイミングにおける車両基準座標系と前回の監視タイミングにおける車両基準座標系との関係を示す説明図。
【図8】今回の監視タイミングにおける車両基準座標系と絶対座標系との関係を示す説明図。
【図9】(a)が履歴マップの構成を示す説明図、(b)が高さの差分値の算出方法を示す説明図。
【図10】(a)がサイドビュー表示例、(b)が鳥瞰図表示例。
【図11】従来装置の問題点を示す説明図。
【符号の説明】
【0062】
1…サスペンション制御装置 2…周囲状況獲得センサ群 2a…前方センサ 2b…後方センサ 3…走行情報獲得センサ群 3a…車速センサ 3b…ステアリング角センサ 4…姿勢情報獲得センサ群 4a…傾斜角センサ 4b…ハイトセンサ群 5…路面監視処理部 6…記録部 7…表示制御部 8…サスペンション制御部
【技術分野】
【0001】
本発明は、車両周囲の路面状況(路面の凹凸や路面上の障害物)を監視する路面監視装置、及びその監視結果を利用するサスペンション制御装置に関する。
【背景技術】
【0002】
従来より、車両周囲の状況を画面に表示することにより、運転者に周囲の状況を把握させ、運転者に的確な操作を行わせるための監視装置が知られている。
その一つとして、ビームの方向が固定された複数のレーザーレーダを車体周囲に設置し、その複数のレーザーレーダでの検出結果、即ち、レーザー光を反射する障害物との相対的な位置関係を表す位置データを、車速やステアリング角から求めた車両移動量分だけ補正しながら逐次蓄積し、その蓄積したデータに基づいて車両の周囲の状況を示す地図データを合成,表示(鳥瞰図表示)する装置が知られている(例えば特許文献1参照)。
【特許文献1】特開平07−248382号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、この従来装置では、路面の形状(勾配の変化)や車両の姿勢によっては、路面に形成された凹凸や路上に存在する障害物の形状を正しく検出することができない場合があるという問題があった。
【0004】
即ち、従来装置は、レーザーレーダとレーザー光の反射地点(障害物や路面)との相対的な位置関係を検出するものであり、路面が平坦であり且つ車両の姿勢が水平であることを前提としたものとなる。従って、例えば、図11(a)に示すように、車両が、勾配が変化する路面を走行しながら路面を監視する場合、勾配が変化する地点を通過する時に、路面の勾配に対する車両の姿勢が変化することによって、図11(b)に示すように、路面に窪みがあるかのように誤検出されてしまうのである。
【0005】
また、路面に凹凸がある場合、従来装置のような鳥瞰図表示では、凹部なのか凸部なのか、また、その深さや高さ等を運転者に直感的に把握させることが困難であるという問題もあった。
【0006】
特に、車両が電動車椅子や1人乗り小型モビリティ等であった場合には、重心が高く車体が軽いため、路面の凹凸や路上の障害物を正しく検出できないと、バランスを崩して横転してしまう危険性があるため、この問題はより切実である。
【0007】
本発明は、上記問題点を解決するために、車両の姿勢に関わらず路面状況を正確に検出可能な監視装置、及びその監視結果を利用するサスペンション制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するためになされた発明である請求項1に記載の路面監視装置では、位置情報検出手段が、予め設定された監視タイミング毎に、自車両の進行方向を横切る方向に沿って走査しながら路面に向けて探査波を照射すると共に該探査波の反射波を受信する送受信部からの受信信号に基づき、探査波を反射した地点の位置を、送受信部の設置位置を基準点として三次元的に示した検出位置情報を求める。また、状態情報検出手段が、自車両の走行状態及び姿勢を表す車両状態情報を検出する。
【0009】
すると、ベクトル算出手段が、状態情報検出手段で検出された車両状態情報に基づいて、自車両の移動距離及び移動方向を示した三次元ベクトルである移動ベクトルを求め、変換手段が、自車両と一体に移動し且つ自車両の姿勢に対して不動な位置を基準位置として、位置情報検出手段で検出された検出位置情報を、状態情報検出手段で検出された車両状態情報及び送受信部の設置状況を表す設置情報に基づいて、基準位置に対する相対的な位置関係を示した三次元ベクトルである相対位置ベクトルに変換する。
【0010】
そして、蓄積手段が、ベクトル算出手段にて算出された移動ベクトル及び変換手段にて変換された相対位置ベクトルを、前回の監視タイミングでの基準位置に加算することで、最初の監視タイミングでの基準位置との相対的な位置関係を表す反射地点情報を算出して蓄積する。
【0011】
このように本発明の路面監視装置では、路面や路面上の障害物についての検出結果が車両の姿勢に応じて変化する検出位置情報をそのまま使用するのではなく、車両の姿勢の影響を受けない基準位置からの相対位置ベクトルに変換し、更に、自車両(即ち基準位置)の軌跡を表す移動ベクトルを用いて反射地点情報(最初の監視タイミングでの基準位置との相対的な位置関係を表す)に変換して蓄積している。
【0012】
従って、本発明の路面監視装置によれば、監視タイミング毎に変化しない固定された座標系で反射地点情報が表されるため、この反射地点情報を用いることによって、車両の姿勢に関わらず路面状況(形状)や路上の障害物を正確に検出することができる。
【0013】
請求項2に記載の路面監視装置では、凹凸境界検出手段が、蓄積手段にて蓄積された反射地点情報に基づいて、自車両の移動方向に沿った高さの変化量の絶対値が予め設定された閾値以上となる部位を、凹凸部位の境界として検出する。
【0014】
このように構成された本発明の路面監視装置によれば、路面に存在する段差等の位置を精度よく検出することができる。
なお、蓄積手段は、請求項3に記載のように、最初の監視タイミングでの基準位置を含んだ基準面を格子状に分割してなる分割領域を設定し、反射地点情報を、その分割領域における基準面からの高さとして蓄積することが望ましい。
【0015】
この場合、凹凸検出手段は、隣接する分割領域の値(高さ)を比較することで、凹凸部位を簡単に検出することができる。
また、探査波は、所望の分解能で走査できるものであれば、電波や音波などを用いてもよいが、請求項4に記載のように、指向性の高いビームを容易に実現可能なレーザー光を用いることが望ましい。
【0016】
次に、請求項5に記載の路面監視装置では、表示手段が、蓄積手段によって蓄積された反射地点情報に基づいて生成される自車両の周囲の状況を表す画像に、自車両を表す画像を重畳して表示する。
【0017】
このように構成された本発明の路面監視装置によれば、検出した路面状況(形状)を、運転者に直感的に把握させることができる。
更に、表示手段は、請求項6に記載のように、サイドビューで表示するように構成されていてもよいし、請求項7に記載のように、鳥瞰図で表示するように構成されていてもよい。
【0018】
特に、サイドビュー表示では、高さ方向のサイズを運転者に把握させることができるため、例えば、路面から突出した障害物が車体と接触する高さであるか否か、障害物が駐車場のパーキングロットである場合に車輪と接触しない距離であるか否か、凸部や凹部によって生じる段差が乗り越え可能な高さであるか否か等を、運転者に的確に判断させることができる。
【0019】
ところで、状態情報検出手段が、自車両の姿勢を検出するセンサとして、車体の前後左右への傾斜角を検出する傾斜角センサを少なくとも備えている場合、その傾斜角センサは、請求項8に記載のように、送受信部と一体に構成されていることが望ましい。
【0020】
この場合、システムを構成する際に配線数を低減できる。
また、状態情報検出手段は、自車両の姿勢を検出するセンサとして、例えば、請求項9に記載のように、車輪毎に設けられたハイトセンサを用いてもよい。
【0021】
次に、請求項10に記載の発明は、アクティブサスペンションを備えた車両に搭載されるサスペンション制御装置であって、請求項1乃至請求項9のいずれかに記載の路面監視装置と、車両姿勢が常にフラットになるように、路面監視装置での検出結果に基づいて、アクティブサスペンションの制動量を算出する制御量算出手段とを備えることを特徴とする。
【0022】
この場合、路面監視装置によって路面状況が精度よく検出されるため、アクティブサスペンションの制御量の算出、ひいては車両姿勢の制御を精度よく行うことができる。
【発明を実施するための最良の形態】
【0023】
以下に本発明の実施形態を図面と共に説明する。
図1は、サスペンション特性を電子制御によって変更可能なアクティブサスペンションを搭載する車両に設置され、路面の状況を監視すると共に、監視結果に基づいてサスペンション特性を制御するサスペンション制御装置1の構成を示すブロック図である。
【0024】
[全体構成]
図1に示すように、サスペンション制御装置1は、車両前方の路面の状況を検出する前方センサ2a,車両後方の路面の状況を検出する後方センサ2bからなる周囲状況獲得センサ群2と、車速センサ3a,ステアリング角センサ3bを少なくとも含み車両の走行状態に関する情報(以下「走行情報」という)を獲得するための走行情報獲得センサ群3と、水平面(重力方向と直交する面)に対する傾斜角α(ロール角αx,ピッチ角αy)を検出する傾斜角センサ4a、自車両の各車輪に設けられ、各車輪上における路面からのシャーシの高さ(車高)を検出するハイトセンサ群4bを少なくとも含み車両の姿勢に関する情報(以下「姿勢情報」という)を獲得するための姿勢情報獲得センサ群4とを備えている。
【0025】
このうち、周囲状況獲得センサ群2を構成する前方センサ2a,後方センサ2bは、いずれも、レーザー光を照射してその反射光を受光するまでの時間を測定することにより、レーザー光を反射した地点までの距離を測定するレーザーレーダからなり、予め設定された角度範囲を一次元的に走査するように構成されている。
【0026】
また、前方センサ2a,後方センサ2bは、図6(a)に示すように、レーザー光が路面に向けて照射されるように斜め下向きに取り付けられており、以下では、そのレーザー光の照射方向と水平面とが成す角度をセンサ取付角度θLという。また、前方センサ2a,後方センサ2bの車高(路面からシャーシまでの高さ)分を除いた取付高さをHで表すものとする。
【0027】
そして、前方センサ2a,及び後方センサ2bにより測定される距離及び照射方向から算出される検出位置情報は、センサの取付位置(レーザー光が照射され、反射光が受光される地点)を原点とするセンサ座標系で表される。このセンサ座標系は、具体的には、図3(a)に示すように、センサ2の正面方向(レーザー光の走査範囲の中心方向)をy軸、y軸に直交した水平方向をx軸、x軸,y軸のいずれにも直交する方向をz軸とするものであり、x軸が車幅方向と一致するように車両に設置されている。
【0028】
なお、前方センサ2a,後方センサ2bは、外見上目立たないように取り付けることが望ましく、例えば、リアウインドウの上部に庇を有する車両であれば、その庇の中に後方センサ2bを埋め込むことが望ましい。
【0029】
また、サスペンション制御装置1は、CPU,ROM,RAMを備えた周知のマイクロコンピュータを中心に構成され、センサ群2,3,4からの検出結果に基づいて路面の状況(路面形状)を検出する処理を実行する路面監視処理部5と、路面監視処理部5によって生成される履歴マップ(後述する)を記録する記録部6と、記録部6に記録された履歴マップの内容等を、車両に設置されたモニタ(図示せず)に表示する表示制御部7と、路面監視処理部5での検出結果に従ってアクティブサスペンション(図示せず)の特性を制御するサスペンション制御部8とを備えている。
【0030】
[路面監視処理部]
ここで、路面監視処理部5が実行する処理を、図2に示すフローチャートに沿って詳述する。なお、本処理は、車両のイグニションスイッチをオンにすると、予め設定された一定間隔ΔT(例えば50ms)の監視タイミング毎に、繰り返し実行される。
【0031】
但し、自車両のトランスミッションが後進ギアに設定されている場合は、後方センサ2bでの検出結果が用いられ、それ以外の場合は、前方センサ2aでの検出結果が用いられるものとする。以下の説明では、前方センサ2a,後方センサ2bを特定せず、周囲状況獲得センサ2として説明する。
【0032】
また、以下の説明において、車両中心座標系とは、図3(b)に示すように、車幅方向をx軸、車長方向をy軸、車高方向をz軸として、(x,y,z)=(車幅方向の中心,ホイールベースの中心,車高)で表される車両の中心位置を原点とした座標系であり、また、車両基準座標系とは、図3(c)に示すように、座標の原点が路面上に位置するように、車両中心座標をz軸方向に車高分だけシフトさせた座標系のことである。更に、最初の監視タイミングにおける車両基準座標系の原点を含んだ水平面を基準面、その基準面をX−Y平面とする座標系を絶対座標系と呼ぶものとする。
【0033】
本処理が起動すると、まず、S110では、周囲状況獲得センサ2にレーザー光を照射させることによって路面をスキャンし、その測定結果(距離,照射方向)からレーザー光を反射した地点を、センサ座標で表した検出位置情報(XL,YL,ZL)を求める。ここでセンサは一次元走査のため、ZL=0である。
【0034】
S120では、走行情報獲得センサ群3から走行情報(車速V,ステアリング角θz)を取得すると共に、姿勢情報獲得センサ群4から姿勢情報(傾斜角センサピッチ角αx,傾斜角センサロール角αy,ハイトセンサピッチ角βx,ハイトセンサロール角βy)を取得する。
【0035】
なお、走行情報V,θz、姿勢情報αx,αy,βx,βyは、車両中心座標(車両基準座標でも同様)を用いて表されている。また、ハイトセンサピッチ角βx,ハイトセンサロール角βyは、ハイトセンサ群4bの出力(各車輪の近傍における車高)から、周知の方法を用いて算出する。
【0036】
S130では、S120にて取得した走行情報(車速V)と、本処理の起動周期ΔTとに基づき、(1)式を用いて車両の移動距離Dを算出する。
【0037】
【数1】
S140では、S120にて取得した姿勢情報αx,αy,βx,βyに基づき、(2)(3)式を用いて路面傾斜角θ(路面ピッチ角θx,路面ロール角θy)を算出する。なお、図4は、姿勢情報である傾斜角センサ測定角α(αx,αy),ハイトセンサ測定角β(βx,βy)と、路面傾斜角θ(θx,θy)との関係を示す説明図である。
【0038】
【数2】
S150では、S130で求めた車両の移動距離D、S140で求めた路面の路面傾斜角θx,θy、S120で取得したステアリング角θzに基づき、(4)式を用いて、車両の移動距離,移動方向を表す移動ベクトル(ΔX,ΔY,ΔZ)を算出する。なお、図5は、移動距離D,ステアリング角θzと、路面ピッチ角θx,路面ロール角θyとの関係を示す説明図である。
【0039】
【数3】
S160では、S110で取得されセンサ座標で示された検出位置情報(XL,YL,ZL)から、車両基準座標の原点からの相対的な位置関係を表す相対位置ベクトル(XP,YP,ZP)を算出する。
【0040】
具体的には、まず(5)〜(7)式を用いて、検出位置情報(XL,YL,ZL)を、車両中心座標で示した第1変換位置ベクトル(XC,YC,ZC)に変換する(図6(a)参照)。但し(5)式は、センサは一次元走査のため、ZL=0の場合の式である。
【0041】
【数4】
次に、この第1変換位置ベクトル(XC,YC,ZC)を、(8)式を用いて、ハイトセンサ測定角βx,βyで表される車体の傾きによる周囲状況獲得センサ2の傾きの影響を補正すると共に、原点の位置を車両中心から路面上にシフトすることで車両基準座標で表した第2変換位置ベクトル(XC’,YC’,ZC’)に変換する(図6(b)参照)。
【0042】
【数5】
更に、この第2変換位置ベクトル(XC’,YC’,ZC’)を、(9)式を用いて、路面傾斜による周囲状況獲得センサ2の傾きの影響を補正することで、相対位置ベクトル(XP,YP,ZP)を求める。
【0043】
【数6】
S170では、(10)式に示すように、S150で求めた移動ベクトル(ΔX,ΔY,ΔZ)及びS160で求めた相対位置ベクトル(XP,YP,ZP)を、前回の監視タイミングにおける車両基準座標系の原点を絶対座標系で表した位置(Xr,Yr,Zr)に加算することで、レーザー光を反射した位置を絶対座標系で表した反射地点情報(X,Y,Z)を算出する。これと共に、(11)式に従って、今回の監視タイミングにおける車両基準座標系の原点を絶対座標系で表した位置により、前回位置(Xr,Yr,Zr)を更新する。
【0044】
【数7】
なお、図7は、今回の監視タイミングにおける車両基準座標系と、前記の監視タイミングにおける車両基準座標系との関係を示した説明図であり、図8は、今回の監視タイミングにおける車両基準座標系と絶対座標系との関係を示した説明図である。但し、図中において、ΣΔX,ΣΔY,ΣΔZは、それぞれ、最初の監視タイミングから今回の監視タイミングまでの間に算出された全てのΔX,ΔY,ΔZの累積値を表すものとする。
【0045】
S180では、S170で算出された反射地点情報(X,Y,Z)を、過去の反射地点情報を順次蓄積することで生成され、記録部6に記録されている履歴マップに追加する。
なお、履歴マップは、基準面(絶対座標系のX−Y平面)を、予め設定されたサイズ(ここでは5cm×5cm)で格子状に分割することで設定された複数の分割領域からなる。但し、図9(a)に示すように、車両基準座標系において、X軸方向にレーザー光の照射範囲で規定される幅(ここでは2m)を有し、Y軸方向に予め設定された長さ(ここでは3m)を有した範囲に対応する分割領域(ここでは40×60個)のみが記憶対象となるようにされている。
【0046】
そして、反射地点情報の基準面上での位置(X,Y)に対応する分割領域に反射地点情報の高さを表す値Zを順次格納する。
S190では、履歴マップの記憶内容に基づき、高さ方向の変化量を算出する。
【0047】
具体的には、図9(b)に示すように、車両の移動方向(図ではY方向)に並んだ分割領域群(メッシュ列という)のそれぞれについて、高さを表す値Zが格納されている最も近くに位置する分割領域との間で差分値(図では−dZ/dY)を求める。なお、この差分値は、差分メッシュ列として別途記憶する。
【0048】
S200では、S190で求めた差分値の絶対値が予め設定された閾値より大きいものを抽出すると共に、その抽出した差分値がプラスであれば立上エッジ、マイナスであれば立下エッジとして認識する。更に、同じメッシュ列上で車両に近い側に立上エッジが存在し、車両より遠い位置に立下エッジが存在する領域を凸エリアとして認識し、また、同じメッシュ列上で車両に近い側に立下エッジが存在し、車両より遠い位置に立上エッジが存在する領域を凹エリアとして認識すると共に、複数のメッシュ列に跨る一連の凸エリア又は凹エリアの輪郭等を検出する。
【0049】
S210では、S200での認識結果や検出結果をサスペンション制御部8に出力する。
S220では、S200での認識結果や検出結果、及び履歴マップに基づいて、車両の周囲の状況を鳥瞰図表示するためのデータ、及びサイドビュー表示するためのデータを生成し、これら生成したデータを表示制御部7に出力して、本処理を終了する。
【0050】
なお、S210にて路面監視処理部5からの出力を受けたサスペンション制御部8では、S200での認識結果や検出結果(凹凸エリアの形状やサイズ)に基づき、車両の姿勢が常に水平に保持されるように、サスペンションの特性を制御する。
【0051】
一方、S220にて路面監視処理部5からの出力を受けた表示制御部7では、生成データに従って、車両の周囲の状況を表す鳥瞰図及びサイドビューに、自車両を表す画像を重畳した表示を行う(図10参照)と共に、S200での認識結果に基づき、最寄りの凹凸エリアまでの距離や、その凹凸エリアの高さ,深さ、その凹凸エリアの危険度等の表示も行う。
[効果]
以上説明したように、路面監視処理部5では、路面や路面上の障害物についての検出結果が車両の姿勢に応じて変化する検出位置情報(XL,YL,ZL)をそのまま使用するのではなく、車両の姿勢の影響を受けない基準位置からの相対位置ベクトル(XP,YP,ZP)に変換し、更に、自車両(即ち基準位置)の軌跡を表す移動ベクトル(ΔX,ΔY,ΔZ)を用いて、最初の監視タイミングでの基準位置との相対的な位置関係を表す反射地点情報(X,Y,Z)に変換して蓄積し、その蓄積された反射地点情報を用いて路面上の凹凸部位を検出するようにされている。
【0052】
つまり、本実施形態では、反射地点情報(X,Y,Z)が、監視タイミング毎に変化しない固定された絶対座標系を用いて示されるため、車両の姿勢等に関わらず路面状況(形状)や路上の障害物を正確に検出することができる。
【0053】
また、路面監視処理部5では、反射地点情報(X,Y,Z)を蓄積する際に、履歴マップを用いて、基準面上での位置(X,Y)を表す分割領域毎に、その分割領域での高さを示す情報Zを記憶するように構成されている。
【0054】
従って、立上エッジや立下エッジを検出する際に算出する高さ情報の差分値を、簡易な処理によって求めることができる。
また、表示制御部7では、履歴マップに基づいて生成される自車両の周囲の状況を表す画像に、自車両を表す画像を重畳して表示すると共に、鳥瞰図表示だけでなくサイドビュー表示も行うようにされている。
【0055】
従って、本実施形態によれば、検出した路面状況(形状)や、路面上の凸エリアや凹エリアと自車両との位置関係等を、運転者に直感的に把握させることができる。
[他の実施形態]
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において、様々な態様にて実施することが可能である。
【0056】
例えば、上記実施形態では、自車両として図10に示すような普通四輪自動車を想定しているが、電動車椅子や1人乗り小型モビリティ等であってもよい。これらの車両は重心が高く車体が軽いため、路面の凹凸の影響を受け易く、最悪の場合には横転してしまう可能性がある。そのため、路面状態を正確に把握し、凹凸や障害物を事前に報知したり、車両の姿勢が常に水平に保持されるようにサスペンションの特性を制御したりすることで、横転を回避できる。
【0057】
また、上記実施形態では、路面監視処理部5での処理結果に基づいて、表示制御及びサスペンション制御のいずれも行っているが、いずれか一方だけを実施するように構成してもよい。
【0058】
上記実施形態では、周囲状況獲得センサ群2を構成する前方センサ2a及び後方センサ2bとしてレーザーレーダを用いているが、レーザーレーダの代わり電波センサや超音波センサや、カメラ等の受動式のセンサを用いてもよい。また、これらセンサのうち複数を同時に用いて、検出結果を組み合わせて路面の状況を検出するように構成してもよい。
【0059】
また、上記実施形態では、レーザー光を一次元的に走査するように構成したが、二次元的に走査するように構成してもよい。この場合、一次元的な走査では、移動方向の分解能が車両の移動速度に依存することになるが、二次元的な走査が可能であれば、車両の移動速度によらず、移動方向に対して任意の分解能を実現することができる。
【0060】
上記実施形態では、傾斜角センサ4aの設置位置について特に言及していないが、前方センサ2aや後方センサ2bと一体に形成してもよい。この場合、システムを構成する際に配線数を低減することができる。
【図面の簡単な説明】
【0061】
【図1】サスペンション制御装置の全体構成を示すブロック図。
【図2】路面監視処理部が実行する処理の内容を示すフローチャート。
【図3】処理に使用する座標系を示す説明図。
【図4】傾斜角センサ測定角α,ハイトセンサ測定角βと路面傾斜角θとの関係を示す説明図。
【図5】移動距離D,ステアリング角θzと、路面ピッチ角θx,路面ロール角θyとの関係を示す説明図。
【図6】(a)がセンサ座標と車両中心座標との関係、(b)が車両中心座標と車両基準座標との関係を示す説明図。
【図7】今回の監視タイミングにおける車両基準座標系と前回の監視タイミングにおける車両基準座標系との関係を示す説明図。
【図8】今回の監視タイミングにおける車両基準座標系と絶対座標系との関係を示す説明図。
【図9】(a)が履歴マップの構成を示す説明図、(b)が高さの差分値の算出方法を示す説明図。
【図10】(a)がサイドビュー表示例、(b)が鳥瞰図表示例。
【図11】従来装置の問題点を示す説明図。
【符号の説明】
【0062】
1…サスペンション制御装置 2…周囲状況獲得センサ群 2a…前方センサ 2b…後方センサ 3…走行情報獲得センサ群 3a…車速センサ 3b…ステアリング角センサ 4…姿勢情報獲得センサ群 4a…傾斜角センサ 4b…ハイトセンサ群 5…路面監視処理部 6…記録部 7…表示制御部 8…サスペンション制御部
【特許請求の範囲】
【請求項1】
車両に搭載される路面監視装置であって、
予め設定された監視タイミング毎に、自車両の進行方向を横切る方向に沿って走査しながら路面に向けて探査波を照射すると共に該探査波の反射波を受信する送受信部からの受信信号に基づき、前記探査波を反射した地点の位置を、前記送受信部の設置位置を基準点として三次元的に示した検出位置情報を求める位置情報検出手段と、
自車両の走行状態及び姿勢を表す車両状態情報を検出する状態情報検出手段と、
前記状態情報検出手段で検出された車両状態情報に基づいて、自車両の移動距離及び移動方向を示した三次元ベクトルである移動ベクトルを求めるベクトル算出手段と、
自車両と一体に移動し且つ自車両の姿勢に対して不動な位置を基準位置として、前記位置情報検出手段で検出された検出位置情報を、前記状態情報検出手段で検出された車両状態情報及び前記送受信部の設置状況を表す設置情報に基づいて、前記基準位置に対する相対的な位置関係を示した三次元ベクトルである相対位置ベクトルに変換する変換手段と、
前記ベクトル算出手段にて算出された移動ベクトル及び前記変換手段にて変換された相対位置ベクトルを、前回の監視タイミングでの前記基準位置に加算することで、最初の監視タイミングでの前記基準位置との相対的な位置関係を表す反射地点情報を算出して蓄積する蓄積手段と、
を備えることを特徴とする路面監視装置。
【請求項2】
前記蓄積手段にて蓄積された反射地点情報に基づいて、自車両の移動方向に沿った高さの変化量の絶対値が予め設定された閾値以上となる部位を、凹凸部位の境界として検出する凹凸境界検出手段を備えることを特徴とする請求項1に記載の路面監視装置。
【請求項3】
前記蓄積手段は、
最初の監視タイミングでの前記基準位置を含んだ基準面を格子状に分割してなる分割領域を設定し、前記反射地点情報を、前記分割領域における前記基準面からの高さとして蓄積することを特徴とする請求項1又は請求項2に記載の路面監視装置。
【請求項4】
前記探査波は、レーザー光からなることを特徴とする請求項1乃至請求項3のいずれかに記載の路面監視装置。
【請求項5】
前記蓄積手段によって蓄積された反射地点情報に基づいて生成される自車両の周囲の状況を表す画像に、自車両を表す画像を重畳して表示する表示手段を備えることを特徴とする請求項1乃至請求項4のいずれかに記載の路面監視装置。
【請求項6】
前記表示手段は、サイドビューで表示することを特徴とする請求項5に記載の路面監視装置。
【請求項7】
前記表示手段は、鳥瞰図で表示することを特徴とする請求項5又は請求項6に記載の路面監視装置。
【請求項8】
前記状態情報検出手段は、自車両の姿勢を検出するセンサとして、車体の前後左右への傾斜角を検出する傾斜角センサを少なくとも備え、
前記傾斜角センサは、前記送受信部と一体に構成されていることを特徴とする請求項1乃至請求項7のいずれかに記載の路面監視装置。
【請求項9】
前記状態情報検出手段は、自車両の姿勢を検出するセンサとして、車輪毎に設けられたハイトセンサを少なくとも備えることを特徴とする請求項1乃至請求項8のいずれかに記載の路面監視装置。
【請求項10】
アクティブサスペンションを備えた車両に搭載されるサスペンション制御装置であって、
請求項1乃至請求項9のいずれかに記載の路面監視装置と、
車両姿勢が常にフラットになるように、前記路面監視装置での検出結果に基づいて、前記アクティブサスペンションの制御量を算出する制御量算出手段と、
を備えることを特徴とするサスペンション制御装置。
【請求項1】
車両に搭載される路面監視装置であって、
予め設定された監視タイミング毎に、自車両の進行方向を横切る方向に沿って走査しながら路面に向けて探査波を照射すると共に該探査波の反射波を受信する送受信部からの受信信号に基づき、前記探査波を反射した地点の位置を、前記送受信部の設置位置を基準点として三次元的に示した検出位置情報を求める位置情報検出手段と、
自車両の走行状態及び姿勢を表す車両状態情報を検出する状態情報検出手段と、
前記状態情報検出手段で検出された車両状態情報に基づいて、自車両の移動距離及び移動方向を示した三次元ベクトルである移動ベクトルを求めるベクトル算出手段と、
自車両と一体に移動し且つ自車両の姿勢に対して不動な位置を基準位置として、前記位置情報検出手段で検出された検出位置情報を、前記状態情報検出手段で検出された車両状態情報及び前記送受信部の設置状況を表す設置情報に基づいて、前記基準位置に対する相対的な位置関係を示した三次元ベクトルである相対位置ベクトルに変換する変換手段と、
前記ベクトル算出手段にて算出された移動ベクトル及び前記変換手段にて変換された相対位置ベクトルを、前回の監視タイミングでの前記基準位置に加算することで、最初の監視タイミングでの前記基準位置との相対的な位置関係を表す反射地点情報を算出して蓄積する蓄積手段と、
を備えることを特徴とする路面監視装置。
【請求項2】
前記蓄積手段にて蓄積された反射地点情報に基づいて、自車両の移動方向に沿った高さの変化量の絶対値が予め設定された閾値以上となる部位を、凹凸部位の境界として検出する凹凸境界検出手段を備えることを特徴とする請求項1に記載の路面監視装置。
【請求項3】
前記蓄積手段は、
最初の監視タイミングでの前記基準位置を含んだ基準面を格子状に分割してなる分割領域を設定し、前記反射地点情報を、前記分割領域における前記基準面からの高さとして蓄積することを特徴とする請求項1又は請求項2に記載の路面監視装置。
【請求項4】
前記探査波は、レーザー光からなることを特徴とする請求項1乃至請求項3のいずれかに記載の路面監視装置。
【請求項5】
前記蓄積手段によって蓄積された反射地点情報に基づいて生成される自車両の周囲の状況を表す画像に、自車両を表す画像を重畳して表示する表示手段を備えることを特徴とする請求項1乃至請求項4のいずれかに記載の路面監視装置。
【請求項6】
前記表示手段は、サイドビューで表示することを特徴とする請求項5に記載の路面監視装置。
【請求項7】
前記表示手段は、鳥瞰図で表示することを特徴とする請求項5又は請求項6に記載の路面監視装置。
【請求項8】
前記状態情報検出手段は、自車両の姿勢を検出するセンサとして、車体の前後左右への傾斜角を検出する傾斜角センサを少なくとも備え、
前記傾斜角センサは、前記送受信部と一体に構成されていることを特徴とする請求項1乃至請求項7のいずれかに記載の路面監視装置。
【請求項9】
前記状態情報検出手段は、自車両の姿勢を検出するセンサとして、車輪毎に設けられたハイトセンサを少なくとも備えることを特徴とする請求項1乃至請求項8のいずれかに記載の路面監視装置。
【請求項10】
アクティブサスペンションを備えた車両に搭載されるサスペンション制御装置であって、
請求項1乃至請求項9のいずれかに記載の路面監視装置と、
車両姿勢が常にフラットになるように、前記路面監視装置での検出結果に基づいて、前記アクティブサスペンションの制御量を算出する制御量算出手段と、
を備えることを特徴とするサスペンション制御装置。
【図1】

【図2】
【図5】
【図9】
【図3】
【図4】
【図6】
【図7】
【図8】
【図10】
【図11】
【図2】
【図5】
【図9】
【図3】
【図4】
【図6】
【図7】
【図8】
【図10】
【図11】
【公開番号】特開2010−25632(P2010−25632A)
【公開日】平成22年2月4日(2010.2.4)
【国際特許分類】
【出願番号】特願2008−185104(P2008−185104)
【出願日】平成20年7月16日(2008.7.16)
【出願人】(000004695)株式会社日本自動車部品総合研究所 (1,981)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成22年2月4日(2010.2.4)
【国際特許分類】
【出願日】平成20年7月16日(2008.7.16)
【出願人】(000004695)株式会社日本自動車部品総合研究所 (1,981)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]