
踏切障害物検知装置
【課題】降雨時や霧発生時の水滴や降雪時の雪などによる不要な反射波(クラッタ)の影響の更なる低減を図り、もって障害物の検知精度の低下や誤検知の発生を効果的に抑制することのできる踏切障害物検知装置を提供する。
【解決手段】踏切障害物検知装置1は、踏切道10に設定された監視領域S内における障害物の有無を検知する。踏切障害物検知装置1は、監視領域Sを含む所定領域内に電波を送信するとともに送信された電波の反射波を受信する第1、第2送受信機2、3と、第1、第2送受信機2、3に接続された制御装置4と、を備える。制御装置4は、障害物の有無を判定する判定処理部を含み、当該判定処理部は、前記反射波に基づいて生成されて前記所定領域内の雰囲気中に一様に存在する反射物に起因する信号成分がノイズ成分として除去された信号に基づいて障害物の有無を判定する。
【解決手段】踏切障害物検知装置1は、踏切道10に設定された監視領域S内における障害物の有無を検知する。踏切障害物検知装置1は、監視領域Sを含む所定領域内に電波を送信するとともに送信された電波の反射波を受信する第1、第2送受信機2、3と、第1、第2送受信機2、3に接続された制御装置4と、を備える。制御装置4は、障害物の有無を判定する判定処理部を含み、当該判定処理部は、前記反射波に基づいて生成されて前記所定領域内の雰囲気中に一様に存在する反射物に起因する信号成分がノイズ成分として除去された信号に基づいて障害物の有無を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、踏切道内に取り残された障害物をミリ波などの電波を用いて検知する踏切障害物検知装置に関する。
【背景技術】
【0002】
従来からミリ波などの電波を利用して、踏切道内に取り残された人、車椅子、自転車及び自動車などの障害物を検知する踏切障害物検知装置が知られている。この種の踏切障害物検知装置は、電波を監視対象領域(以下単に「監視領域」という)に送信し、送信した電波の障害物による反射波を受信して障害物の検知を行うため、障害物の大小にかかわらず、踏切道内における障害物の有無を検知することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−325690号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記のような踏切障害物検知装置は、降雨時などにおいては、雨(水滴)からの反射波、すなわち、不要な反射波(以下「クラッタ」という)によって障害物の検知精度の低下や誤検知を招くおそれがある。そのため、例えば受信した反射波の信号レベルに平均化処理を施すことにより、クラッタの影響、すなわち、クラッタノイズを低減し、これにより、障害物の検知精度の低下や誤検知を抑制することが考えられる。
しかし、上記平均化処理では、クラッタノイズそのものを除去することができないので、ある程度SN比を改善できるものの、その改善効果が十分とは言えず、更なる改善が求められている。
本発明は、このような実情に着目してなされたものであり、降雨時や霧発生時の水滴や降雪時の雪などによるクラッタノイズの更なる低減を図り、もって障害物の検知精度の低下や誤検知の発生を効果的に抑制することのできる踏切障害物検知装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の一側面による踏切障害物検知装置は、踏切道に設定された監視領域内における障害物の有無を検知する踏切障害物検知装置であって、前記監視領域を含む所定領域内に電波を送信するとともに送信された電波の反射波を受信する送受信部と、前記反射波に基づいて生成される信号であって、前記所定領域内の雰囲気中に一様に存在する反射物に起因する信号成分がノイズ成分として除去された前記信号に基づいて障害物の有無を判定する判定処理部と、を備える。
【発明の効果】
【0006】
上記踏切障害物検知装置によれば、電波の送信範囲内である監視領域を含む所定領域内の雰囲気中に水滴(雨、霧)、雪、砂塵等の反射物が一様に存在する場合には、当該反射物に起因する信号成分がノイズ成分として除去された信号に基づいて障害物の有無を判定するので、上記反射物による不要な反射波の影響が低減され、障害物の検知精度の低下や誤検知の発生を効果的に抑制することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態による踏切障害物検知装置の全体構成を示す図である。
【図2】上記踏切障害物検知装置における送受信機の概略構成に示す図である。
【図3】上記踏切障害物検知装置の制御装置の概略構成を示すブロック図である。
【図4】上記制御装置のビート信号処理部によって行われるビート信号の周波数解析によって得られる周波数毎の信号レベルデータ(周波数(距離)−信号レベルデータ)の一例を示す図である。
【図5】上記制御装置のノイズ成分除去部の構成を示すブロック図である。
【図6】上記ノイズ成分除去部によるノイズ成分の除去処理の概要を示す図である。
【発明を実施するための形態】
【0008】
以下、添付図面を参照して本発明の実施形態について説明する。
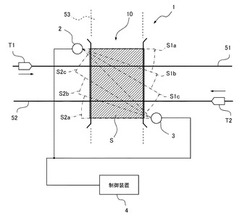
図1は、本発明の一実施形態による踏切障害物検知装置の全体構成を示している。この踏切障害物検知装置1は、列車T1,T2の走行する線路51,52と道路53(破線で示す)とが交差する踏切道10内における障害物の有無を検知するものであり、図1に示すように、踏切道10の近傍に配置された第1送受信器2及び第2送受信器3と、第1送受信器2及び第2送受信器3に接続された制御装置4と、を含む。
【0009】
本実施形態において、踏切障害物検知装置1は、図1中にハッチングで示された矩形領域を、障害物の有無の検知を行う監視領域Sとしている。この監視領域Sとしては、例えば踏切道10のうち、当該踏切道10に設置された一対の遮断機の遮断棹(図示省略)で挟まれた領域とすることができる。
【0010】
第1送受信器2及び第2送受信器3は、図1に示すように、平面視において踏切道10を挟んで互いに対角に位置するように配置されている。具体的には、第1送受信器2は、踏切道10の一方の出入口近傍で、かつ、踏切道10に直交する方向における一方の側方に(換言すれば、監視領域Sの左上隅部の外側に)配置され、第2送受信器3は、踏切道10の他方の出入口近傍で、かつ、踏切道10に直交する方向における他方の側方に(換言すれば、監視領域Sの右下隅部の外側に)配置されている。
【0011】
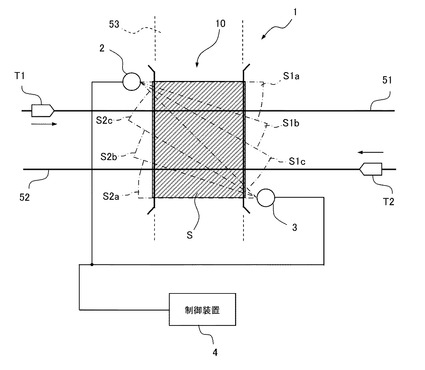
図2は、第1送受信機2の概略構成を示している。
図2に示すように、第1送受信機2は、第1〜第3送受信ユニット2a〜2cを含む。第1送受信ユニット2aは、送信部21a、送信アンテナ22a、受信部23a、受信アンテナ24a及びビート信号生成部25aを有する。第1送受信ユニット2aにおいて、送信部21aは送信アンテナ22aを介して図1中に一点鎖線で示された扇形状の領域S1aに周波数をスイープさせた電波(検知ビーム)を送信し、受信部23aは受信アンテナ24aを介して反射波を受信する。そして、ビート信号生成部25aは、送信波及び反射波に基づいて、送信波と反射波の周波数差に対応する周波数を有するビート信号を生成する。このビート信号が障害物判定用の信号に相当する。
【0012】
同様に、第2送受信ユニット2bは、送信部21b、送信アンテナ22b、受信部23b、受信アンテナ24b及びビート信号生成部25bを有しており、図1中に一点鎖線で示された扇形状の領域S1bに周波数をスイープさせた電波(検知ビーム)を送信するとともにその反射波を受信してビート信号を生成する。また、第3送受信ユニット2cは、送信部21c、送信アンテナ22c、受信部23c、受信アンテナ24c及びビート信号生成部25cを有しており、図1中に一点鎖線で示された扇形状の領域S1cに周波数をスイープさせた電波(検知ビーム)を送信するとともにその反射波を受信してビート信号を生成する。
【0013】
第2送受信機3は、第1送受信機2と同様の構成を有している。ここでの詳細な説明は省略するが、第2送受信機3も第1〜第3送受信ユニットを有しており、図1に一点鎖線で示された扇形状の領域S2a〜S2cのそれぞれに電波を送信するとともに送信された電波の反射波を受信し、送信波とその反射波の周波数差に対応する周波数を有するビート信号を領域S2a〜S2cのそれぞれについて生成する。
【0014】
ここで、図1に示すように、電波の送信領域S1a〜S1c、S2a〜S2cは、それぞれ監視領域S以外の領域を含むとともに空白領域が生じないように連続させてあり、これにより、監視領域Sの全体にわたって電波(検知ビーム)が送信される。
そして、第1送受信器2、第2送受信機3は、それぞれ領域S1a〜S1c、領域S2a〜S2cに対する電波の送信を周期的(すなわち、所定の検知周期毎)に繰り返して行い、ビート信号を生成して制御装置4へと出力する。なお、各送受信ユニットから送信される電波は、特に制限されないが、本実施形態においては周波数帯域が30〜300GHz(波長10〜1nm)のミリ波を用いている。
【0015】
制御装置4は、第1送受信機2及び第2送受信機3、より具体的には、第1送受信機2及び第2送受信機3の各送受信ユニットの作動を制御するとともに、各送受信ユニットによって生成されたビート信号を入力し、入力されたビート信号に基づいて監視領域S内における障害物の有無を判定する。そして、制御装置4は、監視領域S内に障害物が有ると判定した場合には、例えば警告灯(図示省略)を作動させて障害物がある旨を列車の運転者や最寄りの駅係員等に知らせる。
【0016】
ところで、降雨時、降雪時又は霧発生時などにおいては、電波の送信領域(S1a〜S1c、S2a〜S2c)内の雰囲気中にほぼ一様に水滴(雨、霧)や雪などの障害物とはならない(比較的小さな)反射物が存在する。かかる状況では、各送受信ユニットによって生成されるビート信号に上記障害物とはならない反射物に起因する信号成分が含まれることになる。このため、単にビート信号に基づいて障害物の有無を判定すると、実際には監視領域S内に障害物がないにもかかわらず、障害物があると判定してしまうおそれがある。このような誤検知は、不要な列車の運行停止などを招くため、可能な限りなくすことが望まれる。
【0017】
そこで、本実施形態における制御装置4は、電波の送信領域(S1a〜S1c、S2a〜S2c)内の雰囲気中に、水滴(雨、霧)、雪あるいは砂塵などの障害物とはならない反射物が一様に存在し、当該障害物とはならない反射物からの反射波によって誤検知を招くおそれがある場合には、当該障害物とはならない反射物に起因する信号成分を上記ビート信号からノイズ成分として除去して得られる信号に基づいて障害物の有無を判定する。なお、上記水滴(雨、霧)、雪あるいは砂塵のほかにも、雹、霰や霙なども障害物とはならない上記比較的小さな反射物に該当する。以下、詳細に説明する。
【0018】
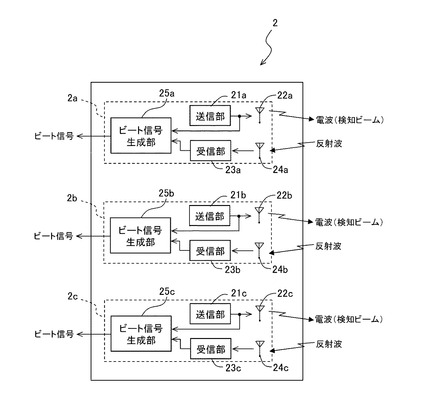
図3は、制御装置4の構成を示すブロック図である。
図3に示すように、制御装置4は、ビート信号を解析・処理するビート信号処理部41と、電波(検知ビーム)の送信領域内の雰囲気状態を検知する雰囲気検知部42と、ビート信号からノイズ成分を除去するノイズ成分除去部43と、障害物の有無を判定する判定処理部44と、を含む。
【0019】
ビート信号処理部41は、第1送受信機2及び第2送受信機3の各送受信ユニットから出力されたビート信号を入力し、入力された各ビート信号の周波数解析を行って周波数毎の信号レベルデータを求める。これにより、ビート信号処理部41の周波数分解能に応じた個数の信号レベルデータが取得される。ここで、ビート信号に含まれる周波数は、第1送受信機2又は第2送受信機3から送信電波を反射した物体までの距離に相当するものであり、上記信号レベルデータは、当該物体からの反射波の信号レベルを示す。
【0020】
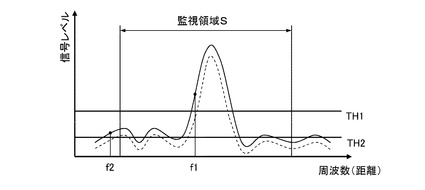
図4は、ビート信号の周波数解析によって得られる周波数毎の信号レベルデータ(周波数(距離)−信号レベル)の一例を示している。ビート信号処理部41は、領域S1a〜S1c、S2a〜S2cのそれぞれについて図4に示すような周波数毎の信号レベルデータを求める。そして、監視領域S内に物体(障害物)が存在する場合には、監視領域Sに対応する周波数の範囲内において予め設定された障害物検知用の第1の閾値TH1よりも大きな信号レベルデータが存在する。
【0021】
雰囲気検知部42は、ビート信号処理部41によって求められた上記周波数毎の信号レベルデータに基づいて、電波(検知ビーム)の送信領域内の雰囲気状態を検知する。例えば、上記周波数毎の信号レベルデータにおいて、上記第1の閾値TH1よりも小さい値として予め設定された雰囲気検知用の第2の閾値TH2(図4参照)よりも大きな信号レベルデータの割合が所定値を超える場合に、電波の送信領域内の雰囲気中に上記障害物とはならない反射物が一様に存在し当該反射物によって誤検知を招くおそれのある雰囲気状態であると検知する。ここで、上記所定値は、例えば50〜90%(好ましくは、70〜80%)の任意の値とすることでき、上記第2の閾値TH2は、例えば降雨時、降雪時又は霧発生時における障害物のない状態での信号レベルに基づいて設定される。
なお、上記のような誤検知を招くおそれのある雰囲気状態を検知することができればよく、雰囲気検知部42に代えて降雨計、降雪計、霧検知センサなどを用い、これらの出力が所定値以上である場合に、誤検知を招くおそれのある雰囲気状態であることを検知するようにしてもよい。
【0022】
ノイズ成分除去部43は、雰囲気検知部42によって誤検知を招くおそれのある雰囲気状態であることが検知された場合に、ビート信号処理部41によって求められた各周波数(各距離)の信号レベルデータから上記障害物とはならない反射物に起因する信号成分をノイズ成分として除去する。具体的には、ノイズ成分除去部43は、音声信号処理(雑音除去処理)に用いられる「スペクトルサブトラクション法」に準じた方法によって、周波数領域で上記ノイズ成分のスペクトルを取り除く。
【0023】
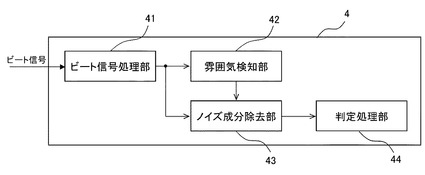
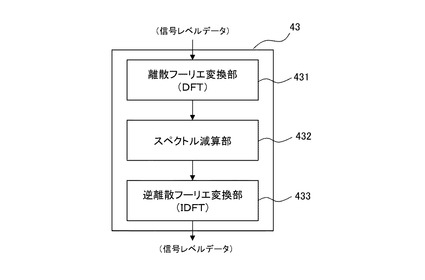
図5は、ノイズ成分除去部43の構成を示すブロック図である。
図5に示すように、ノイズ成分除去部43は、離散フーリエ変換部431と、スペクトル減算部432と、逆離散フーリエ変換部433と、を含む。
【0024】
離散フーリエ変換部431は、監視領域Sに対応する各周波数について、時間領域のN個(すなわち、上記検知周期N回分)の信号レベルデータを離散フーリエ変換によって周波数領域のスペクトルPs(W)に変換する。
また、離散フーリエ変換部431は、電波の送信領域のうち監視領域S以外の領域に対応する特定の周波数について、N個の信号レベルデータを離散フーリエ変換によって周波数領域のスペクトルに変換し、これを上記ノイズ成分のスペクトルPn(W)とする。このようにしてノイズ成分のスペクトルPn(W)を求めるのは、電波の送信領域のうち監視領域S以外の領域は、通常、人や物などが進入しない領域であり、水滴(雨、霧)、雪、砂塵などの上記障害物とはならない反射物に起因する信号成分(すなわち、ノイズ成分)のスペクトルのみを取得するのに適しているからである。なお、上記特定の周波数は一つである必要はなく、電波の送信領域のうち監視領域S以外の領域に対応する複数の周波数のそれぞれについて、N個の信号レベルデータを離散フーリエ変換によって周波数領域のスペクトルに変換し、これらに基づいて上記ノイズ成分のスペクトルPn(W)を設定してもよい。
【0025】
スペクトル減算部432は、離散フーリエ変換部431の処理結果である各周波数の信号レベルデータのスペクトルPs(W)から上記ノイズ成分のスペクトルPn(W)をそれぞれ減算する。具体的は、下式に基づき、上記ノイズ成分を含む各周波数の信号レベルデータのスペクトルPs(W)から上記ノイズ成分のスペクトルPn(W)を取り除く。
D(W)=Ps(W)−αPn(W)
但し、D(W)≦βPn(W)の場合、D(W)=βPn(W)
ここで、α、βは係数である。
そして、逆離散フーリエ変換部433は、スペクトル減算部432で得られたスペクトルD(W)を逆離散フーリエ変換によって時間領域の信号レベルデータに変換する。
【0026】
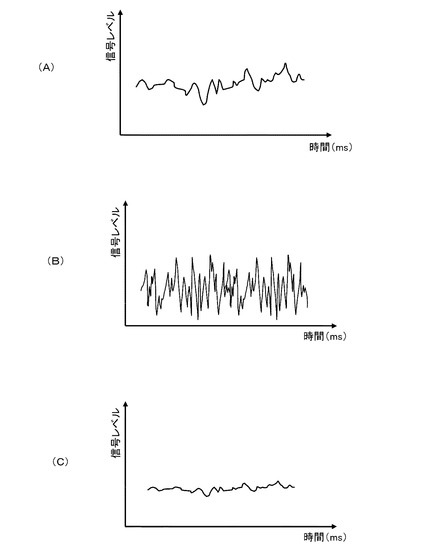
図6は、ノイズ成分除去部43によるノイズ成分の除去処理の概要を示す図である。
図6(A)は、監視領域Sに対応する特定の周波数f1(図4参照)の信号レベルの時間変動(時間領域の信号レベルデータ)を示している。図6(A)に示される信号レベルには、障害物となる物体からの反射波の信号レベルだけではなく、上述したような障害物とはならない反射物に起因する信号成分がノイズ成分として含まれている。
【0027】
図6(B)は、監視領域S以外の領域に対応する特定の周波数f2(図4参照)の信号レベルの時間変動を示している。図6(B)に示される信号レベルは、上記障害物とはならない反射物からの反射波の信号レベルである。そして、この障害物とはならない反射物からの反射波は、その信号レベルは距離(場所)によって異なるものの、その周波数特性は電波の送信範囲内の全体に亘ってほぼ共通するものであると言える。
【0028】
そこで、ノイズ成分除去部43は、監視領域S以外の特定領域に対応する周波数の信号レベルデータ(図6(B))に基づき監視領域S内における上記ノイズ成分のスペクトルPn(W)を設定(推定)し、監視領域Sに対応する各周波数の上記ノイズ成分を含む信号レベルデータ(図6(A))のスペクトルPs(W)から上記ノイズ成分のスペクトルPn(W)を差し引く。そして、得られたスペクトルD(W)を逆離散フーリエ変換することにより、図6(C)に示すような上記ノイズ成分が除去された信号レベルデータを復元する。
【0029】
ノイズ成分除去部43がこのようなノイズ成分の除去処理を監視領域Sに対応する各周波数の信号レベルデータに対して施すことにより、図4中に破線で示すように、新たな周波数毎の信号レベルデータ、すなわち、上記障害物とはならない反射物に起因する信号成分がノイズ成分として除去された信号レベルデータを得ることができる。
【0030】
図3に戻って、判定処理部44は、雰囲気検知42による雰囲気状態の検知結果に応じて、ビート信号処理部41によって求められた周波数毎の信号レベルデータ(図4において実線で示す)又はノイズ成分除去部42によってノイズ成分が除去された後の周波数毎の信号レベルデータ(図4において破線で示す)に基づいて監視領域S内における障害物の有無を判定する。具体的には、監視領域Sに対応する周波数の範囲内に上記第1の閾値TH1を超える信号レベルデータが存在する場合に、監視領域S内に障害物があると判定する。
【0031】
以上説明したように、本実施形態による踏切障害物検知装置1は、降雨時、降雪時又は霧発生時など、第1送受信機2及び第2送受信機3からの電波の送信範囲内の雰囲気中に障害物とはならないが電波を反射する比較的小さな反射物が一様に存在する場合には、第1送受信機2及び第2送受信機3によって受信される反射波に基づいて生成される信号であって、上記比較的小さな反射物に起因する信号成分がノイズ成分として除外された前記信号に基づいて障害物の有無を判定する。これにより、上記比較的小さな反射物による不要な反射波の影響(クラッタノイズ)を低減し、検知精度の低下や誤検知を効果的に抑制することができる。
【0032】
ここで、上記ノイズ成分は、電波の送信範囲内のうち監視領域S以外の領域に対応する信号に基づいて設定することができる。当該領域には、通常、人や物が進入しないことから、当該領域に対応する信号は上記比較的小さな反射物からの反射波に基づくものと考えられ、また、上記比較的小さな反射物の障害物検知に対する影響は監視領域Sを含む電波の送信範囲内の全体にわたってほぼ同様であると考えられるからである。例えば、監視領域S以外の領域に対応する特定の信号レベルの変化量と上記ノイズ成分とが対応付けられたテーブルを設け、上記特定の信号レベルの変化量に基づくテーブル参照値を上記ノイズ成分として設定することができる。
なお、上記実施形態において、第1送受信機2及び第2送受信機3は、監視領域Sとそれ以外の領域とを区別することなく、これらを含む所定領域内に電波を送信しているが、監視領域Sとそれ以外の領域とを区別して電波を送信するように構成してもよい。
【0033】
また、上記比較的小さな反射物に基づくテーブル参照値を上記ノイズ成分として設定することができる。この場合には、例えば、上記比較的小さな反射物の種類と上記ノイズ成分とが対応付けられたテーブルを設けるとともに上記比較的小さな反射物の種類を示す信号が外部から制御装置4に入力されるように構成し、外部からの入力信号に基づいて上記テーブルを参照して上記ノイズ成分を設定するように構成することができる。さらに、監視領域S以外の領域に対応する特定の信号レベルの変化量及び上記比較的小さな反射物の種類に基づいて上記比較的小さな反射物の種類を特定するようにしてもよい。
【0034】
より具体的に、本実施形態においては、第1送受信機2及び第2送受信機3の各送受信ユニットによって生成されるビート信号から上記比較的小さな反射物に起因する信号成分をノイズ成分として除外して得られた信号に基づいて障害物の有無を判定する。上記ビート信号は、送信波と反射波との周波数差に相当する周波数を有しており、ビート信号に含まれる周波数は、送信された電波を反射した物体の位置(第1送受信機2又は第2送受信機3からの距離)に対応する。したがって、ビート信号を周波数解析することによって、監視領域S内に物体(障害物)が存在するか否かを容易に判定することができるため便宜である。なお、本実施形態では、送信波及び反射波に基づいてビート信号を生成した後に上記ノイズ成分を除去しているが、まず反射波から上記ノイズ成分を除去し、その後に上記ビート信号又はこれに代わる障害物判定用の信号を生成するように構成してもよい。
【0035】
また、本実施形態における上記ビート信号からの上記ノイズ成分の除去は、ビート信号の周波数解析が行われた後に行われる。すなわち、ビート信号を周波数解析することによって周波数毎(すなわち、距離毎)の信号レベルデータとし、監視領域Sに対応する各周波数の信号レベルデータから上記ノイズ成分が除去される。これにより、上記ノイズ成分の除去を必要かつ十分な範囲で行うことができる。但し、これに限るものではなく、ビート信号の周波数解析によって得られた全ての周波数の信号レベルデータから上記ノイズ成分が除去されるようにしてもよいし、障害物検知用の上記第1の閾値TH1よりも大きな信号レベルデータのみから上記ノイズ成分を除去するようにしてもよい。
【0036】
上記ビート信号からの上記ノイズ成分の除去についてさらに説明すれば、本実施形態における上記ノイズ成分の除去処理は、上記各周波数の信号レベルデータに対して周波数領域で上記ノイズ成分のスペクトルを取り除くことによって行われる。
すなわち、監視領域Sに対応する各周波数の信号レベルデータ(上記ノイズ成分が含まれる)を離散フーリエ変換によってスペクトルPs(W)に変換し、そこから上記ノイズ成分のスペクトルPn(w)又はこれに所定の係数を乗算したものを差し引き、その結果得られたスペクトルD(W)を逆離散フーリエ変換することによって上記ノイズ成分が除去された信号レベルデータを復元する。これにより、各信号レベルデータについて、本来の信号レベルの低下を招くことなく、各信号レベルデータに含まれた上記ノイズ成分のみを効果的に除去することができる。
【0037】
ここで、本実施形態においては、上記ノイズ成分のスペクトルPn(W)として監視領域S以外の領域に対応する信号レベルデータを離散フーリエ変換して得られたスペクトルを用いる。上述したように、監視領域S以外の領域には、通常、人や物が進入しないため電波を反射する物体がなく、上記比較的小さな反射物による反射波の周波数特性は、電波の送信範囲内の全体に亘ってほぼ共通すると考えられるからである。これにより、そのときの雰囲気状態に応じた上記ノイズ成分のスペクトルPn(W)を用いることができるので、上記ノイズ成分を効果的に除去することができる。
但し、これに限るものではなく、監視領域S内であっても人や物などが存在していない状態であれば、監視領域Sに対応する周波数の信号レベルデータを離散フーリエ変換して上記ノイズ成分のスペクトルPn(W)として用いることができる。また、監視領域S以外の特定領域に対応する一又は複数の周波数の信号レベルと上記ノイズ成分のスペクトルPn(W)とが対応付けられたテーブルを予め作成しておき、監視領域S以外の上記特定領域に対応する一又は複数の周波数の信号レベルデータに基づき上記テーブルを参照することによって上記ノイズ成分のスペクトルPn(W)を設定してもよい。
【0038】
さらに、本実施形態においては、雰囲気中に上記比較的小さな反射物が一様に存在することによって誤検知を招くおそれがある場合にのみ、上述したようなノイズ成分の除去処理を行うようにしている。具体的には、ビート信号を周波数解析して得られた周波数毎(距離毎)に信号レベルデータにおいて、雰囲気検知用の第2の閾値TH2よりも大きい信号レベルデータの割合が所定値を超える場合に上記ノイズ成分の除去処理が行われ、上記所定値以下である場合には上記ノイズ成分の除去処理が行われない。これにより、必要以上に上記ノイズ成分の除去処理が行われることが防止される。なお、上記ノイズ成分の除去処理が行われない場合には、ビート信号処理部41によって求められた周波数毎の信号レベルデータに基づいて障害物の有無が判定される。
【0039】
以上、本発明の実施形態及びその変形例について説明したが、本発明はこれに限定されるものではなく、本発明の技術的思想に基づいて更なる変形や変更が可能であることはもちろんである。
【符号の説明】
【0040】
1…踏切障害物検知装置、2…第1送受信機、3…第2送受信機、4…制御装置、10…踏切道、41…ビート信号処理部、42…雰囲気検知部、43…ノイズ成分除去部、44…判定処理部、431…離散フーリエ変換部、432…スペクトル減算部、433…逆離散フーリエ変換部、S…監視領域
【技術分野】
【0001】
本発明は、踏切道内に取り残された障害物をミリ波などの電波を用いて検知する踏切障害物検知装置に関する。
【背景技術】
【0002】
従来からミリ波などの電波を利用して、踏切道内に取り残された人、車椅子、自転車及び自動車などの障害物を検知する踏切障害物検知装置が知られている。この種の踏切障害物検知装置は、電波を監視対象領域(以下単に「監視領域」という)に送信し、送信した電波の障害物による反射波を受信して障害物の検知を行うため、障害物の大小にかかわらず、踏切道内における障害物の有無を検知することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−325690号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記のような踏切障害物検知装置は、降雨時などにおいては、雨(水滴)からの反射波、すなわち、不要な反射波(以下「クラッタ」という)によって障害物の検知精度の低下や誤検知を招くおそれがある。そのため、例えば受信した反射波の信号レベルに平均化処理を施すことにより、クラッタの影響、すなわち、クラッタノイズを低減し、これにより、障害物の検知精度の低下や誤検知を抑制することが考えられる。
しかし、上記平均化処理では、クラッタノイズそのものを除去することができないので、ある程度SN比を改善できるものの、その改善効果が十分とは言えず、更なる改善が求められている。
本発明は、このような実情に着目してなされたものであり、降雨時や霧発生時の水滴や降雪時の雪などによるクラッタノイズの更なる低減を図り、もって障害物の検知精度の低下や誤検知の発生を効果的に抑制することのできる踏切障害物検知装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の一側面による踏切障害物検知装置は、踏切道に設定された監視領域内における障害物の有無を検知する踏切障害物検知装置であって、前記監視領域を含む所定領域内に電波を送信するとともに送信された電波の反射波を受信する送受信部と、前記反射波に基づいて生成される信号であって、前記所定領域内の雰囲気中に一様に存在する反射物に起因する信号成分がノイズ成分として除去された前記信号に基づいて障害物の有無を判定する判定処理部と、を備える。
【発明の効果】
【0006】
上記踏切障害物検知装置によれば、電波の送信範囲内である監視領域を含む所定領域内の雰囲気中に水滴(雨、霧)、雪、砂塵等の反射物が一様に存在する場合には、当該反射物に起因する信号成分がノイズ成分として除去された信号に基づいて障害物の有無を判定するので、上記反射物による不要な反射波の影響が低減され、障害物の検知精度の低下や誤検知の発生を効果的に抑制することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態による踏切障害物検知装置の全体構成を示す図である。
【図2】上記踏切障害物検知装置における送受信機の概略構成に示す図である。
【図3】上記踏切障害物検知装置の制御装置の概略構成を示すブロック図である。
【図4】上記制御装置のビート信号処理部によって行われるビート信号の周波数解析によって得られる周波数毎の信号レベルデータ(周波数(距離)−信号レベルデータ)の一例を示す図である。
【図5】上記制御装置のノイズ成分除去部の構成を示すブロック図である。
【図6】上記ノイズ成分除去部によるノイズ成分の除去処理の概要を示す図である。
【発明を実施するための形態】
【0008】
以下、添付図面を参照して本発明の実施形態について説明する。
図1は、本発明の一実施形態による踏切障害物検知装置の全体構成を示している。この踏切障害物検知装置1は、列車T1,T2の走行する線路51,52と道路53(破線で示す)とが交差する踏切道10内における障害物の有無を検知するものであり、図1に示すように、踏切道10の近傍に配置された第1送受信器2及び第2送受信器3と、第1送受信器2及び第2送受信器3に接続された制御装置4と、を含む。
【0009】
本実施形態において、踏切障害物検知装置1は、図1中にハッチングで示された矩形領域を、障害物の有無の検知を行う監視領域Sとしている。この監視領域Sとしては、例えば踏切道10のうち、当該踏切道10に設置された一対の遮断機の遮断棹(図示省略)で挟まれた領域とすることができる。
【0010】
第1送受信器2及び第2送受信器3は、図1に示すように、平面視において踏切道10を挟んで互いに対角に位置するように配置されている。具体的には、第1送受信器2は、踏切道10の一方の出入口近傍で、かつ、踏切道10に直交する方向における一方の側方に(換言すれば、監視領域Sの左上隅部の外側に)配置され、第2送受信器3は、踏切道10の他方の出入口近傍で、かつ、踏切道10に直交する方向における他方の側方に(換言すれば、監視領域Sの右下隅部の外側に)配置されている。
【0011】
図2は、第1送受信機2の概略構成を示している。
図2に示すように、第1送受信機2は、第1〜第3送受信ユニット2a〜2cを含む。第1送受信ユニット2aは、送信部21a、送信アンテナ22a、受信部23a、受信アンテナ24a及びビート信号生成部25aを有する。第1送受信ユニット2aにおいて、送信部21aは送信アンテナ22aを介して図1中に一点鎖線で示された扇形状の領域S1aに周波数をスイープさせた電波(検知ビーム)を送信し、受信部23aは受信アンテナ24aを介して反射波を受信する。そして、ビート信号生成部25aは、送信波及び反射波に基づいて、送信波と反射波の周波数差に対応する周波数を有するビート信号を生成する。このビート信号が障害物判定用の信号に相当する。
【0012】
同様に、第2送受信ユニット2bは、送信部21b、送信アンテナ22b、受信部23b、受信アンテナ24b及びビート信号生成部25bを有しており、図1中に一点鎖線で示された扇形状の領域S1bに周波数をスイープさせた電波(検知ビーム)を送信するとともにその反射波を受信してビート信号を生成する。また、第3送受信ユニット2cは、送信部21c、送信アンテナ22c、受信部23c、受信アンテナ24c及びビート信号生成部25cを有しており、図1中に一点鎖線で示された扇形状の領域S1cに周波数をスイープさせた電波(検知ビーム)を送信するとともにその反射波を受信してビート信号を生成する。
【0013】
第2送受信機3は、第1送受信機2と同様の構成を有している。ここでの詳細な説明は省略するが、第2送受信機3も第1〜第3送受信ユニットを有しており、図1に一点鎖線で示された扇形状の領域S2a〜S2cのそれぞれに電波を送信するとともに送信された電波の反射波を受信し、送信波とその反射波の周波数差に対応する周波数を有するビート信号を領域S2a〜S2cのそれぞれについて生成する。
【0014】
ここで、図1に示すように、電波の送信領域S1a〜S1c、S2a〜S2cは、それぞれ監視領域S以外の領域を含むとともに空白領域が生じないように連続させてあり、これにより、監視領域Sの全体にわたって電波(検知ビーム)が送信される。
そして、第1送受信器2、第2送受信機3は、それぞれ領域S1a〜S1c、領域S2a〜S2cに対する電波の送信を周期的(すなわち、所定の検知周期毎)に繰り返して行い、ビート信号を生成して制御装置4へと出力する。なお、各送受信ユニットから送信される電波は、特に制限されないが、本実施形態においては周波数帯域が30〜300GHz(波長10〜1nm)のミリ波を用いている。
【0015】
制御装置4は、第1送受信機2及び第2送受信機3、より具体的には、第1送受信機2及び第2送受信機3の各送受信ユニットの作動を制御するとともに、各送受信ユニットによって生成されたビート信号を入力し、入力されたビート信号に基づいて監視領域S内における障害物の有無を判定する。そして、制御装置4は、監視領域S内に障害物が有ると判定した場合には、例えば警告灯(図示省略)を作動させて障害物がある旨を列車の運転者や最寄りの駅係員等に知らせる。
【0016】
ところで、降雨時、降雪時又は霧発生時などにおいては、電波の送信領域(S1a〜S1c、S2a〜S2c)内の雰囲気中にほぼ一様に水滴(雨、霧)や雪などの障害物とはならない(比較的小さな)反射物が存在する。かかる状況では、各送受信ユニットによって生成されるビート信号に上記障害物とはならない反射物に起因する信号成分が含まれることになる。このため、単にビート信号に基づいて障害物の有無を判定すると、実際には監視領域S内に障害物がないにもかかわらず、障害物があると判定してしまうおそれがある。このような誤検知は、不要な列車の運行停止などを招くため、可能な限りなくすことが望まれる。
【0017】
そこで、本実施形態における制御装置4は、電波の送信領域(S1a〜S1c、S2a〜S2c)内の雰囲気中に、水滴(雨、霧)、雪あるいは砂塵などの障害物とはならない反射物が一様に存在し、当該障害物とはならない反射物からの反射波によって誤検知を招くおそれがある場合には、当該障害物とはならない反射物に起因する信号成分を上記ビート信号からノイズ成分として除去して得られる信号に基づいて障害物の有無を判定する。なお、上記水滴(雨、霧)、雪あるいは砂塵のほかにも、雹、霰や霙なども障害物とはならない上記比較的小さな反射物に該当する。以下、詳細に説明する。
【0018】
図3は、制御装置4の構成を示すブロック図である。
図3に示すように、制御装置4は、ビート信号を解析・処理するビート信号処理部41と、電波(検知ビーム)の送信領域内の雰囲気状態を検知する雰囲気検知部42と、ビート信号からノイズ成分を除去するノイズ成分除去部43と、障害物の有無を判定する判定処理部44と、を含む。
【0019】
ビート信号処理部41は、第1送受信機2及び第2送受信機3の各送受信ユニットから出力されたビート信号を入力し、入力された各ビート信号の周波数解析を行って周波数毎の信号レベルデータを求める。これにより、ビート信号処理部41の周波数分解能に応じた個数の信号レベルデータが取得される。ここで、ビート信号に含まれる周波数は、第1送受信機2又は第2送受信機3から送信電波を反射した物体までの距離に相当するものであり、上記信号レベルデータは、当該物体からの反射波の信号レベルを示す。
【0020】
図4は、ビート信号の周波数解析によって得られる周波数毎の信号レベルデータ(周波数(距離)−信号レベル)の一例を示している。ビート信号処理部41は、領域S1a〜S1c、S2a〜S2cのそれぞれについて図4に示すような周波数毎の信号レベルデータを求める。そして、監視領域S内に物体(障害物)が存在する場合には、監視領域Sに対応する周波数の範囲内において予め設定された障害物検知用の第1の閾値TH1よりも大きな信号レベルデータが存在する。
【0021】
雰囲気検知部42は、ビート信号処理部41によって求められた上記周波数毎の信号レベルデータに基づいて、電波(検知ビーム)の送信領域内の雰囲気状態を検知する。例えば、上記周波数毎の信号レベルデータにおいて、上記第1の閾値TH1よりも小さい値として予め設定された雰囲気検知用の第2の閾値TH2(図4参照)よりも大きな信号レベルデータの割合が所定値を超える場合に、電波の送信領域内の雰囲気中に上記障害物とはならない反射物が一様に存在し当該反射物によって誤検知を招くおそれのある雰囲気状態であると検知する。ここで、上記所定値は、例えば50〜90%(好ましくは、70〜80%)の任意の値とすることでき、上記第2の閾値TH2は、例えば降雨時、降雪時又は霧発生時における障害物のない状態での信号レベルに基づいて設定される。
なお、上記のような誤検知を招くおそれのある雰囲気状態を検知することができればよく、雰囲気検知部42に代えて降雨計、降雪計、霧検知センサなどを用い、これらの出力が所定値以上である場合に、誤検知を招くおそれのある雰囲気状態であることを検知するようにしてもよい。
【0022】
ノイズ成分除去部43は、雰囲気検知部42によって誤検知を招くおそれのある雰囲気状態であることが検知された場合に、ビート信号処理部41によって求められた各周波数(各距離)の信号レベルデータから上記障害物とはならない反射物に起因する信号成分をノイズ成分として除去する。具体的には、ノイズ成分除去部43は、音声信号処理(雑音除去処理)に用いられる「スペクトルサブトラクション法」に準じた方法によって、周波数領域で上記ノイズ成分のスペクトルを取り除く。
【0023】
図5は、ノイズ成分除去部43の構成を示すブロック図である。
図5に示すように、ノイズ成分除去部43は、離散フーリエ変換部431と、スペクトル減算部432と、逆離散フーリエ変換部433と、を含む。
【0024】
離散フーリエ変換部431は、監視領域Sに対応する各周波数について、時間領域のN個(すなわち、上記検知周期N回分)の信号レベルデータを離散フーリエ変換によって周波数領域のスペクトルPs(W)に変換する。
また、離散フーリエ変換部431は、電波の送信領域のうち監視領域S以外の領域に対応する特定の周波数について、N個の信号レベルデータを離散フーリエ変換によって周波数領域のスペクトルに変換し、これを上記ノイズ成分のスペクトルPn(W)とする。このようにしてノイズ成分のスペクトルPn(W)を求めるのは、電波の送信領域のうち監視領域S以外の領域は、通常、人や物などが進入しない領域であり、水滴(雨、霧)、雪、砂塵などの上記障害物とはならない反射物に起因する信号成分(すなわち、ノイズ成分)のスペクトルのみを取得するのに適しているからである。なお、上記特定の周波数は一つである必要はなく、電波の送信領域のうち監視領域S以外の領域に対応する複数の周波数のそれぞれについて、N個の信号レベルデータを離散フーリエ変換によって周波数領域のスペクトルに変換し、これらに基づいて上記ノイズ成分のスペクトルPn(W)を設定してもよい。
【0025】
スペクトル減算部432は、離散フーリエ変換部431の処理結果である各周波数の信号レベルデータのスペクトルPs(W)から上記ノイズ成分のスペクトルPn(W)をそれぞれ減算する。具体的は、下式に基づき、上記ノイズ成分を含む各周波数の信号レベルデータのスペクトルPs(W)から上記ノイズ成分のスペクトルPn(W)を取り除く。
D(W)=Ps(W)−αPn(W)
但し、D(W)≦βPn(W)の場合、D(W)=βPn(W)
ここで、α、βは係数である。
そして、逆離散フーリエ変換部433は、スペクトル減算部432で得られたスペクトルD(W)を逆離散フーリエ変換によって時間領域の信号レベルデータに変換する。
【0026】
図6は、ノイズ成分除去部43によるノイズ成分の除去処理の概要を示す図である。
図6(A)は、監視領域Sに対応する特定の周波数f1(図4参照)の信号レベルの時間変動(時間領域の信号レベルデータ)を示している。図6(A)に示される信号レベルには、障害物となる物体からの反射波の信号レベルだけではなく、上述したような障害物とはならない反射物に起因する信号成分がノイズ成分として含まれている。
【0027】
図6(B)は、監視領域S以外の領域に対応する特定の周波数f2(図4参照)の信号レベルの時間変動を示している。図6(B)に示される信号レベルは、上記障害物とはならない反射物からの反射波の信号レベルである。そして、この障害物とはならない反射物からの反射波は、その信号レベルは距離(場所)によって異なるものの、その周波数特性は電波の送信範囲内の全体に亘ってほぼ共通するものであると言える。
【0028】
そこで、ノイズ成分除去部43は、監視領域S以外の特定領域に対応する周波数の信号レベルデータ(図6(B))に基づき監視領域S内における上記ノイズ成分のスペクトルPn(W)を設定(推定)し、監視領域Sに対応する各周波数の上記ノイズ成分を含む信号レベルデータ(図6(A))のスペクトルPs(W)から上記ノイズ成分のスペクトルPn(W)を差し引く。そして、得られたスペクトルD(W)を逆離散フーリエ変換することにより、図6(C)に示すような上記ノイズ成分が除去された信号レベルデータを復元する。
【0029】
ノイズ成分除去部43がこのようなノイズ成分の除去処理を監視領域Sに対応する各周波数の信号レベルデータに対して施すことにより、図4中に破線で示すように、新たな周波数毎の信号レベルデータ、すなわち、上記障害物とはならない反射物に起因する信号成分がノイズ成分として除去された信号レベルデータを得ることができる。
【0030】
図3に戻って、判定処理部44は、雰囲気検知42による雰囲気状態の検知結果に応じて、ビート信号処理部41によって求められた周波数毎の信号レベルデータ(図4において実線で示す)又はノイズ成分除去部42によってノイズ成分が除去された後の周波数毎の信号レベルデータ(図4において破線で示す)に基づいて監視領域S内における障害物の有無を判定する。具体的には、監視領域Sに対応する周波数の範囲内に上記第1の閾値TH1を超える信号レベルデータが存在する場合に、監視領域S内に障害物があると判定する。
【0031】
以上説明したように、本実施形態による踏切障害物検知装置1は、降雨時、降雪時又は霧発生時など、第1送受信機2及び第2送受信機3からの電波の送信範囲内の雰囲気中に障害物とはならないが電波を反射する比較的小さな反射物が一様に存在する場合には、第1送受信機2及び第2送受信機3によって受信される反射波に基づいて生成される信号であって、上記比較的小さな反射物に起因する信号成分がノイズ成分として除外された前記信号に基づいて障害物の有無を判定する。これにより、上記比較的小さな反射物による不要な反射波の影響(クラッタノイズ)を低減し、検知精度の低下や誤検知を効果的に抑制することができる。
【0032】
ここで、上記ノイズ成分は、電波の送信範囲内のうち監視領域S以外の領域に対応する信号に基づいて設定することができる。当該領域には、通常、人や物が進入しないことから、当該領域に対応する信号は上記比較的小さな反射物からの反射波に基づくものと考えられ、また、上記比較的小さな反射物の障害物検知に対する影響は監視領域Sを含む電波の送信範囲内の全体にわたってほぼ同様であると考えられるからである。例えば、監視領域S以外の領域に対応する特定の信号レベルの変化量と上記ノイズ成分とが対応付けられたテーブルを設け、上記特定の信号レベルの変化量に基づくテーブル参照値を上記ノイズ成分として設定することができる。
なお、上記実施形態において、第1送受信機2及び第2送受信機3は、監視領域Sとそれ以外の領域とを区別することなく、これらを含む所定領域内に電波を送信しているが、監視領域Sとそれ以外の領域とを区別して電波を送信するように構成してもよい。
【0033】
また、上記比較的小さな反射物に基づくテーブル参照値を上記ノイズ成分として設定することができる。この場合には、例えば、上記比較的小さな反射物の種類と上記ノイズ成分とが対応付けられたテーブルを設けるとともに上記比較的小さな反射物の種類を示す信号が外部から制御装置4に入力されるように構成し、外部からの入力信号に基づいて上記テーブルを参照して上記ノイズ成分を設定するように構成することができる。さらに、監視領域S以外の領域に対応する特定の信号レベルの変化量及び上記比較的小さな反射物の種類に基づいて上記比較的小さな反射物の種類を特定するようにしてもよい。
【0034】
より具体的に、本実施形態においては、第1送受信機2及び第2送受信機3の各送受信ユニットによって生成されるビート信号から上記比較的小さな反射物に起因する信号成分をノイズ成分として除外して得られた信号に基づいて障害物の有無を判定する。上記ビート信号は、送信波と反射波との周波数差に相当する周波数を有しており、ビート信号に含まれる周波数は、送信された電波を反射した物体の位置(第1送受信機2又は第2送受信機3からの距離)に対応する。したがって、ビート信号を周波数解析することによって、監視領域S内に物体(障害物)が存在するか否かを容易に判定することができるため便宜である。なお、本実施形態では、送信波及び反射波に基づいてビート信号を生成した後に上記ノイズ成分を除去しているが、まず反射波から上記ノイズ成分を除去し、その後に上記ビート信号又はこれに代わる障害物判定用の信号を生成するように構成してもよい。
【0035】
また、本実施形態における上記ビート信号からの上記ノイズ成分の除去は、ビート信号の周波数解析が行われた後に行われる。すなわち、ビート信号を周波数解析することによって周波数毎(すなわち、距離毎)の信号レベルデータとし、監視領域Sに対応する各周波数の信号レベルデータから上記ノイズ成分が除去される。これにより、上記ノイズ成分の除去を必要かつ十分な範囲で行うことができる。但し、これに限るものではなく、ビート信号の周波数解析によって得られた全ての周波数の信号レベルデータから上記ノイズ成分が除去されるようにしてもよいし、障害物検知用の上記第1の閾値TH1よりも大きな信号レベルデータのみから上記ノイズ成分を除去するようにしてもよい。
【0036】
上記ビート信号からの上記ノイズ成分の除去についてさらに説明すれば、本実施形態における上記ノイズ成分の除去処理は、上記各周波数の信号レベルデータに対して周波数領域で上記ノイズ成分のスペクトルを取り除くことによって行われる。
すなわち、監視領域Sに対応する各周波数の信号レベルデータ(上記ノイズ成分が含まれる)を離散フーリエ変換によってスペクトルPs(W)に変換し、そこから上記ノイズ成分のスペクトルPn(w)又はこれに所定の係数を乗算したものを差し引き、その結果得られたスペクトルD(W)を逆離散フーリエ変換することによって上記ノイズ成分が除去された信号レベルデータを復元する。これにより、各信号レベルデータについて、本来の信号レベルの低下を招くことなく、各信号レベルデータに含まれた上記ノイズ成分のみを効果的に除去することができる。
【0037】
ここで、本実施形態においては、上記ノイズ成分のスペクトルPn(W)として監視領域S以外の領域に対応する信号レベルデータを離散フーリエ変換して得られたスペクトルを用いる。上述したように、監視領域S以外の領域には、通常、人や物が進入しないため電波を反射する物体がなく、上記比較的小さな反射物による反射波の周波数特性は、電波の送信範囲内の全体に亘ってほぼ共通すると考えられるからである。これにより、そのときの雰囲気状態に応じた上記ノイズ成分のスペクトルPn(W)を用いることができるので、上記ノイズ成分を効果的に除去することができる。
但し、これに限るものではなく、監視領域S内であっても人や物などが存在していない状態であれば、監視領域Sに対応する周波数の信号レベルデータを離散フーリエ変換して上記ノイズ成分のスペクトルPn(W)として用いることができる。また、監視領域S以外の特定領域に対応する一又は複数の周波数の信号レベルと上記ノイズ成分のスペクトルPn(W)とが対応付けられたテーブルを予め作成しておき、監視領域S以外の上記特定領域に対応する一又は複数の周波数の信号レベルデータに基づき上記テーブルを参照することによって上記ノイズ成分のスペクトルPn(W)を設定してもよい。
【0038】
さらに、本実施形態においては、雰囲気中に上記比較的小さな反射物が一様に存在することによって誤検知を招くおそれがある場合にのみ、上述したようなノイズ成分の除去処理を行うようにしている。具体的には、ビート信号を周波数解析して得られた周波数毎(距離毎)に信号レベルデータにおいて、雰囲気検知用の第2の閾値TH2よりも大きい信号レベルデータの割合が所定値を超える場合に上記ノイズ成分の除去処理が行われ、上記所定値以下である場合には上記ノイズ成分の除去処理が行われない。これにより、必要以上に上記ノイズ成分の除去処理が行われることが防止される。なお、上記ノイズ成分の除去処理が行われない場合には、ビート信号処理部41によって求められた周波数毎の信号レベルデータに基づいて障害物の有無が判定される。
【0039】
以上、本発明の実施形態及びその変形例について説明したが、本発明はこれに限定されるものではなく、本発明の技術的思想に基づいて更なる変形や変更が可能であることはもちろんである。
【符号の説明】
【0040】
1…踏切障害物検知装置、2…第1送受信機、3…第2送受信機、4…制御装置、10…踏切道、41…ビート信号処理部、42…雰囲気検知部、43…ノイズ成分除去部、44…判定処理部、431…離散フーリエ変換部、432…スペクトル減算部、433…逆離散フーリエ変換部、S…監視領域
【特許請求の範囲】
【請求項1】
踏切道に設定された監視領域内における障害物の有無を検知する踏切障害物検知装置であって、
前記監視領域を含む所定領域内に電波を送信するとともに送信された電波の反射波を受信する送受信部と、
前記反射波に基づいて生成される信号であって、前記所定領域内の雰囲気中に一様に存在する反射物に起因する信号成分がノイズ成分として除去された前記信号に基づいて障害物の有無を判定する判定処理部と、
を備える踏切障害物検知装置。
【請求項2】
前記ノイズ成分は、前記所定領域内における前記監視領域以外の領域に対応する信号に基づいて設定される、請求項1に記載の踏切障害物検知装置。
【請求項3】
前記ノイズ成分は、前記所定領域内の雰囲気中に一様に存在する反射物に基づくテーブル参照値である、請求項1又は2に記載の踏切障害物検知装置。
【請求項4】
前記送受信部は、送信波とその反射波との周波数差に対応する周波数を有するビート信号を生成して出力するものであり、
前記判定処理部は、前記ビート信号から前記反射物に起因する信号成分をノイズ成分として除去して得られた信号に基づいて障害物の有無を判定する、請求項1〜3のいずれか一つに記載の踏切障害物検知装置。
【請求項5】
前記ビート信号の周波数解析を行って周波数毎の信号レベルデータを求めるビート信号処理部と、
前記監視領域に対応する各周波数の信号レベルデータから前記ノイズ成分を除去するノイズ成分除去部と、
をさらに備え、
前記判定処理部は、前記ノイズ成分が除去された後の各信号レベルデータに基づいて障害物の有無を判定する、請求項4に記載の踏切障害物検知装置。
【請求項6】
前記ノイズ成分除去部は、前記各周波数の信号レベルデータに対し周波数領域にて前記ノイズ成分のスペクトルを取り除く、請求項4又は5に記載の踏切障害物検知装置。
【請求項7】
前記ノイズ成分除去部は、
前記各周波数の信号レベルデータを離散フーリエ変換によって周波数領域のスペクトルに変換する離散フーリエ変換部と、
前記各周波数の信号レベルデータのスペクトルから前記ノイズ成分のスペクトルを減算するスペクトル減算部と、
前記スペクトル減算部によって得られたスペクトルを逆離散フーリエ変換によって時間領域の信号レベルデータに変換する逆離散フーリエ変換部と、
を含む、請求項5又は6に記載の踏切障害物検知装置。
【請求項8】
前記ノイズ成分のスペクトルは、前記監視領域以外の特定領域に対応する少なくとも一つの周波数の信号レベルデータを離散フーリエ変換によって周波数領域のスペクトルに変換して得られたものである、請求項6又は7に記載の踏切障害物検知装置。
【請求項9】
前記ノイズ成分のスペクトルは、前記監視領域以外の特定領域に対応する少なくとも一つの周波数の信号レベルデータに基づくテーブル参照値である、請求項6又は7に記載の踏切障害物検知装置。
【請求項10】
前記判定処理部は、前記ビート信号処理部によって求められた前記周波数毎の信号レベルデータにおいて、予め設定された閾値を超える信号レベルデータの割合が所定値以下である場合には、前記ノイズ成分の除去処理を行うことなく、前記周波数毎の信号レベルデータに基づいて前記障害物の有無を判定する、請求項4〜9のいずれか一つに記載の踏切障害物検知装置。
【請求項1】
踏切道に設定された監視領域内における障害物の有無を検知する踏切障害物検知装置であって、
前記監視領域を含む所定領域内に電波を送信するとともに送信された電波の反射波を受信する送受信部と、
前記反射波に基づいて生成される信号であって、前記所定領域内の雰囲気中に一様に存在する反射物に起因する信号成分がノイズ成分として除去された前記信号に基づいて障害物の有無を判定する判定処理部と、
を備える踏切障害物検知装置。
【請求項2】
前記ノイズ成分は、前記所定領域内における前記監視領域以外の領域に対応する信号に基づいて設定される、請求項1に記載の踏切障害物検知装置。
【請求項3】
前記ノイズ成分は、前記所定領域内の雰囲気中に一様に存在する反射物に基づくテーブル参照値である、請求項1又は2に記載の踏切障害物検知装置。
【請求項4】
前記送受信部は、送信波とその反射波との周波数差に対応する周波数を有するビート信号を生成して出力するものであり、
前記判定処理部は、前記ビート信号から前記反射物に起因する信号成分をノイズ成分として除去して得られた信号に基づいて障害物の有無を判定する、請求項1〜3のいずれか一つに記載の踏切障害物検知装置。
【請求項5】
前記ビート信号の周波数解析を行って周波数毎の信号レベルデータを求めるビート信号処理部と、
前記監視領域に対応する各周波数の信号レベルデータから前記ノイズ成分を除去するノイズ成分除去部と、
をさらに備え、
前記判定処理部は、前記ノイズ成分が除去された後の各信号レベルデータに基づいて障害物の有無を判定する、請求項4に記載の踏切障害物検知装置。
【請求項6】
前記ノイズ成分除去部は、前記各周波数の信号レベルデータに対し周波数領域にて前記ノイズ成分のスペクトルを取り除く、請求項4又は5に記載の踏切障害物検知装置。
【請求項7】
前記ノイズ成分除去部は、
前記各周波数の信号レベルデータを離散フーリエ変換によって周波数領域のスペクトルに変換する離散フーリエ変換部と、
前記各周波数の信号レベルデータのスペクトルから前記ノイズ成分のスペクトルを減算するスペクトル減算部と、
前記スペクトル減算部によって得られたスペクトルを逆離散フーリエ変換によって時間領域の信号レベルデータに変換する逆離散フーリエ変換部と、
を含む、請求項5又は6に記載の踏切障害物検知装置。
【請求項8】
前記ノイズ成分のスペクトルは、前記監視領域以外の特定領域に対応する少なくとも一つの周波数の信号レベルデータを離散フーリエ変換によって周波数領域のスペクトルに変換して得られたものである、請求項6又は7に記載の踏切障害物検知装置。
【請求項9】
前記ノイズ成分のスペクトルは、前記監視領域以外の特定領域に対応する少なくとも一つの周波数の信号レベルデータに基づくテーブル参照値である、請求項6又は7に記載の踏切障害物検知装置。
【請求項10】
前記判定処理部は、前記ビート信号処理部によって求められた前記周波数毎の信号レベルデータにおいて、予め設定された閾値を超える信号レベルデータの割合が所定値以下である場合には、前記ノイズ成分の除去処理を行うことなく、前記周波数毎の信号レベルデータに基づいて前記障害物の有無を判定する、請求項4〜9のいずれか一つに記載の踏切障害物検知装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−1263(P2013−1263A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−134947(P2011−134947)
【出願日】平成23年6月17日(2011.6.17)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月17日(2011.6.17)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]