
身体パラメータ検出センサ
【課題】脊柱の脊椎への骨移植治療、脊椎での生体センサーの提供、脊椎の生体パラメータをセンサーによって測定、という段階を含む、生体パラメータを検出する手法を提供する。
【解決手段】センサーは、圧力、張力、せん断、相対位置、血流などを含む、近接する周囲のパラメータを測定することができる。生体パラメータに関するデータは、外部電源へ伝送され、データは脊椎の生体状態を評価するために分析される。センサー一式は脊椎横突起に設置されることが可能である。
【解決手段】センサーは、圧力、張力、せん断、相対位置、血流などを含む、近接する周囲のパラメータを測定することができる。生体パラメータに関するデータは、外部電源へ伝送され、データは脊椎の生体状態を評価するために分析される。センサー一式は脊椎横突起に設置されることが可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、医療機器の分野に関する。特に、生理(例:筋骨格)系統の特定のパラメータを検出し、および活動の正確な解剖学的部位を測定する、外用および組み込みのシステム、および解剖学的部位のパラメータの検出方法に関する。
【背景技術】
【0002】
センサー技術は米国特許番号6,621,278、6,856,141および6,984,993に、Araivに開示され、Nexense社に譲渡された(Nexense特許)。
【0003】
医療専門要員が解剖学的部位の特性を判断できるよう、現存するセンサー技術を生態情報の感覚用途に応用することは、有益であると思われる。
【発明の開示】
【0004】
したがって、本発明のひとつの目的は、特定のパラメータの(例:筋骨格系などの)検出および活動の解剖学的部位の正確な測定が可能であるセンサー技術、および、下記に示される公知の機器の不利点を克服する解剖学的部位のパラメータ検出方法とこの一般化型の方法、および医療提供者が患者のリアルタイム情報を得ることができる、外用かつ/また組み込みセンサーを提供するものである。情報は、外科的処置および埋め込み装置に関するものと同様、病理過程も含むことが可能である。センサーは、内部または外部のメカニズムによる作動が可能で、情報はワイヤレス経路を通って中継される。このセンサー技術は、インプラント・システムの初期介入または変更を可能にし、また現存のセンサーの使用が可能である。例として、Nexense特許開示のセンサーが使用できる。
【0005】
本発明の特性として検討される他の特徴は、添付の特許請求に説明されている。
【0006】
本発明は、特定の身体パラメータを検出し正確な活動の解剖学的部位を判断できるセンサー・システム、および検出の方法を、具象化されたものとしてここに図示および説明されるが、にもかかわらず、本発明の要旨を逸脱しない特許請求と同等の範囲で、種々の変形および構造変化がされ得るため、示される詳細を限定するものではない。
【0007】
本発明の構造および手術の方法はしかし、そのさらなる目的および利点と共に、添付の図に関連して追随する特定の実施例の説明を読むことにより、最も理解されるであろう。
【図面の簡単な説明】
【0008】
本発明の実施例の利点は、追随する好適な実施例の詳細な説明から明らかになり、説明は添付の図と併せて考察されるべきである。
【0009】
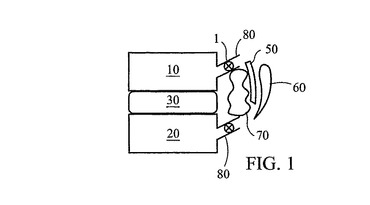
【図1】器具を備えていない脊椎の融合部および本発明によるセンサーを有する、脊椎の一部分の、部分側面線図である。
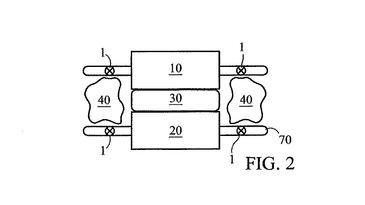
【図2】図1の脊柱部分の、前後方向の部分線図である。
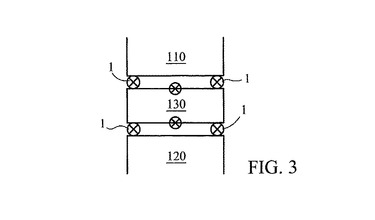
【図3】椎間ケージと本発明によるセンサーを有する、脊柱の一部分の、部分側面線図である。
【図4】スクリュー中に本発明によるセンサーを有する、図1の脊柱部分の、前後方向の部分線図である。
【図5】椎間板インプラントと本発明によるセンサーを有する脊柱の一部分の、部分側面線図である。
【図6】本発明によるセンサー挿入器具の、部分拡大断面線図である。
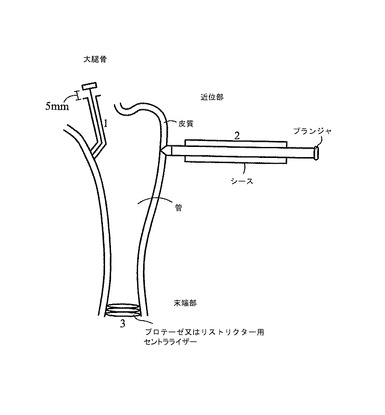
【図7】図6の器具によって本発明によるセンサーが埋め込まれた上部大腿骨の、部分断面線図である。
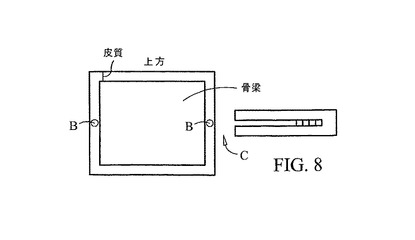
【図8】図6の器具によって本発明によるセンサーが埋め込まれた脊椎の、部分断面線図である。
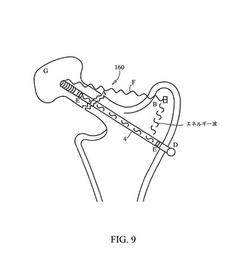
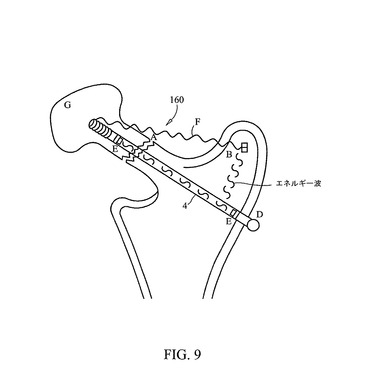
【図9】本発明によるスクリュー中のセンサーを有する大腿骨の、部分断面線図である。
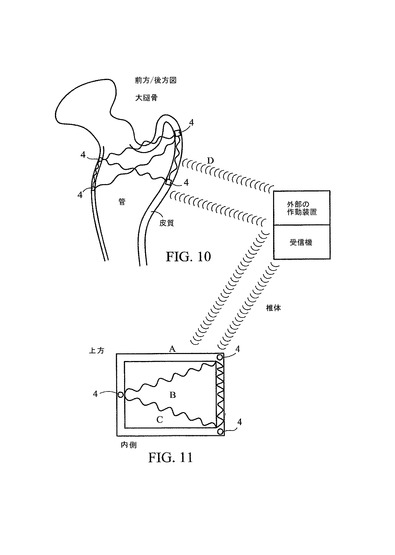
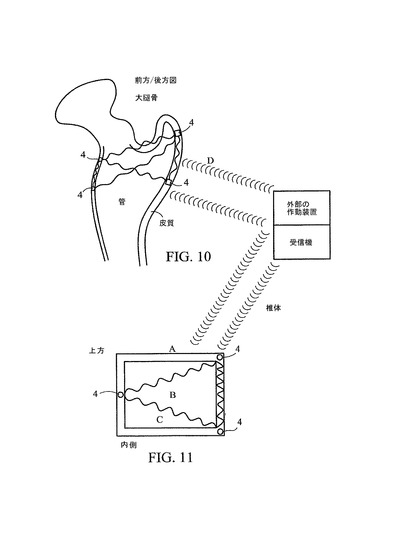
【図10】本発明によるセンサーが埋め込まれた大腿骨の、部分断面線図および、本発明によるセンサーを有する脊椎の、部分断面線図である。
【図11】本発明によるセンサーが埋め込まれた大腿骨の、部分断面線図および、本発明によるセンサーを有する脊椎の、部分断面線図である。
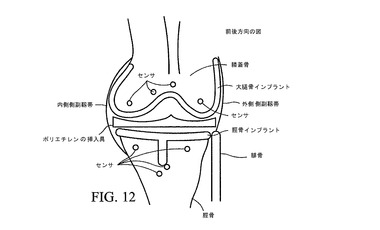
【図12】本発明によるセンサーを有する膝関節の、前後方向の部分断面線図である。
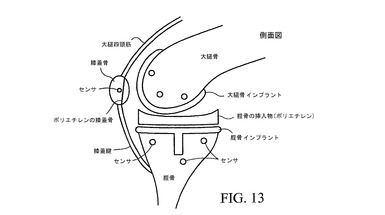
【図13】本発明によるセンサーを有する膝関節の、側面の部分断面線図である。
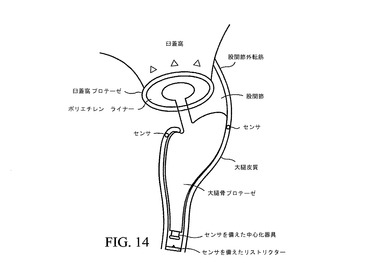
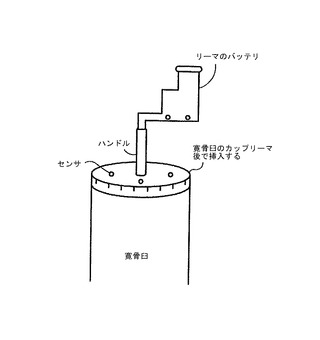
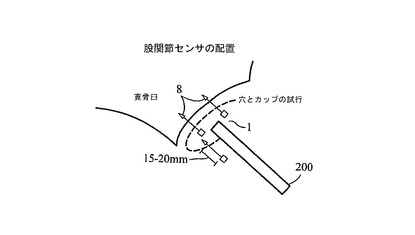
【図14】本発明によるセンサーを有する股関節の、部分断面線図である。
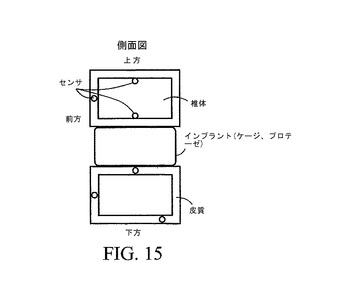
【図15】本発明によるセンサーを有する脊椎の、側面の部分断面線図である。
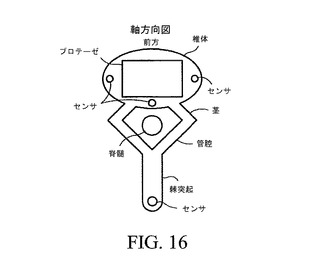
【図16】本発明によるセンサーを有する脊椎骨の、部分軸断面線図である。
【図17】本発明による超音波アクティブ・センサーを有する、膝関節の部分断面線図である。
【図18】治療中に、超音波送信機およびコンピュータ・スクリーンが本発明の超音波アクティブ・センサーによって膝関節を表示している、線図である。
【図19】本発明による埋め込みが可能なセンサー本体に接続されているハンドルの、拡大断面線図である。
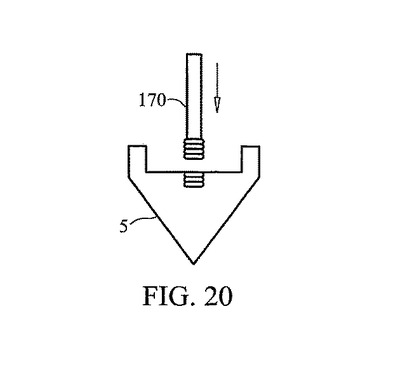
【図20】センサー本体から切断された、図19のハンドルの、拡大断面線図である。
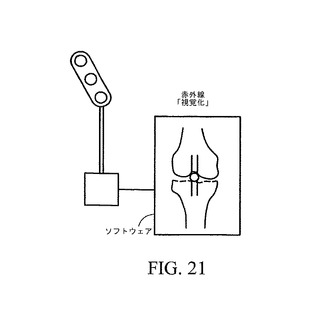
【図21】赤外線可視化システムの線図である。
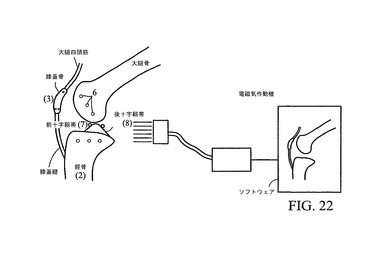
【図22】電磁気可視化システムの線図および、膝関節の、一部分を除いた正面から見た部分側面図である。
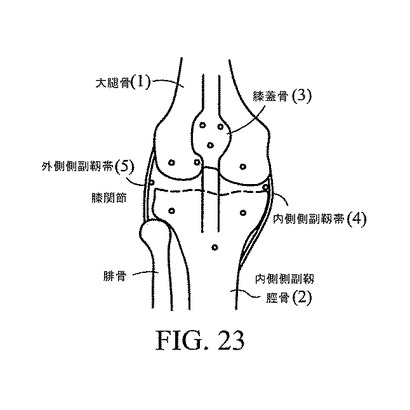
【図23】膝関節の、一部分を除いた正面から見た部分図である。
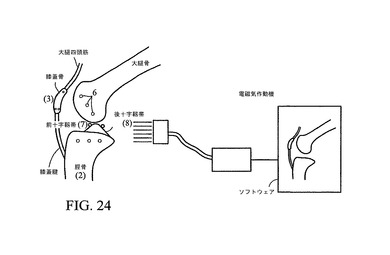
【図24】電磁気可視化システムの線図および、膝関節の、一部分を除いた正面から見た部分側面図である。
【図25】靭帯の横部分立面図である。
【図26】本発明による靭帯センサー・クランプを有する、図25の靭帯の、横部分立面図である。
【図27】靭帯および図26の靭帯センサー・クランプの、横部分立面図である。
【図28】本発明によるセンサーが付着された、図25の靭帯の、横部分立面図である。
【図29】本発明による超音波カニューレ・システムの一部分の、断面部分図である。
【図30】本発明による単体センサーのカニューレ配置装置の一部分の、断面部分図である。
【図31】複数のセンサーを有する、図31のカニューレ配置装置の一部分の、断面部分図である。
【図32】本発明による複数センサーのカニューレ配置装置の、断面部分図である。
【図33】本発明によるセンサーが配置された、軟組織および軟骨除去、骨切断の膝切開手術の、横部分立面図である。
【図34】センサー構成要素が格納された、本発明によるトロカール・チップの、部分断面図である。
【図35】一連のセンサーの挿入具の、部分断面図である。
【図36】本発明による一連のセンサーを格納するカッターの、横立面線図である。
【図37】骨リーマーの横立面線図である。
【図38】股関節に埋め込まれた本発明によるセンサー・システムの、断面部分図である。
【図39】大腿骨に埋め込まれた本発明によるセンサー・システムの、断面部分図である。
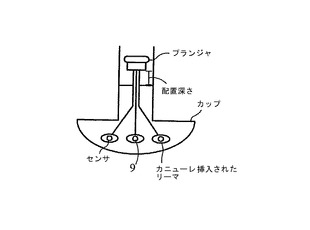
【図40】複数のセンサー配置用の、本発明によるカップ・センサー挿入具の、断面部分図である。
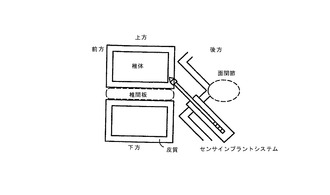
【図41】二つの脊椎分節と、本発明によるセンサー埋め込みシステムの、側断面部分図である。
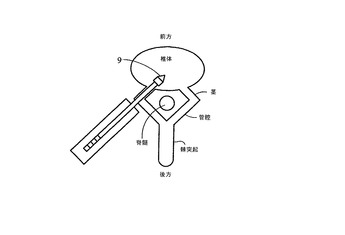
【図42】センサーが茎を通って埋め込まれた、脊椎の段階の、軸断面部分図である。
【発明を実施するための形態】
【0010】
本発明の様相は、追随する説明および本発明の特定の実施例に関連する図の中で開示される。他の実施例は、本発明の精神または範囲を逸脱することなく考慮され得る。さらに、本発明に関連した詳細が不明瞭にならないよう、本発明の模範となる実施例の既知の要素は、詳細に説明されることはない、または割愛される。
【0011】
本発明の開示および説明の前に、本文中に使用される専門用語は特定の実施例を説明する目的にのみのためであって、限定する意図のものではないことを理解されるものとする。明細書および付随する特許請求の中で使用される単数形(a,an,the)は、特に明確な指示がない限り、複数に言及されることが注目されなければならない。
【0012】
明細書と本発明の特徴を定義づける特許請求は、新規であるとされたことを断定し、本発明は、追随する説明と図を連結しての検討から理解されることが、より良いと考えられるが、ここでは同じ参照番号は繰り越される。図の図形は、縮尺どおりではない。
【0013】
本発明による外用適用のセンサー・システムは、皮膚の完全性および、皮膚の虚血および最終的に皮膚の損傷(褥瘡)を引き起こす病的圧力を評価するのに使用されることが可能である。皮膚の損傷を引き起こす、正確なパラメータを検出することは、重要である。例として、圧力、時間、せん断、血流などの要素が、検出に重要であり、特定の解剖学的位置が必要とされる。
【0014】
本発明のセンサー・システムは、特定の問題部位に適用される、薄い接着性の適合材料に埋め込まれることが可能である。例とする部位は、踵、股関節、仙骨などであり、他の部位は危険を伴う。これらのセンサーは、解剖学的部位を決定する。閾値パラメータが超過した場合、センサーは遠隔測定受信を通知し、次に、アラームを作動し、看護士や他の医療専門家に通知する。ある特定の用途で、情報は患者が問題部位の治療のため横たわるベッドを調節するために使用される。特に、マットレスのエアーセルの調節は、問題患部の負荷を軽くし得る。
【0015】
外用センサー・システムは様々な方法で構成されることが可能である。模範的実施例では、センサーは 患者の身体に直接適用される、薄い、適合する粘着性のものの中に配置され、薄いリチウム電池を動力とする。センサー(複数可)は、圧力、時間、せん断、血流など特定のパラメータを記録する。センサーは、受信ユニットを遠隔測定的に通知し、あらかじめ一定にプログラム化されたパラメータが超過した場合のアラームを設定する。ひとつの実施例中には、コンピュータ・スクリーンが患者の身体の輪郭を表示し、特定の問題部位が強調表示され、それによって医療専門家によって可視化されることが可能であるような、視覚補助機器が設けられている。
【0016】
埋め込みセンサーは、人間の目で直接見ることができない、特定の内部パラメータを検出することが必要とされる。これらのセンサーは、特定のパラメータを検出する特定の場所に使用され得る。
【0017】
センサーを埋め込む一つの方法は、切開手術治療を経るものである。そのような手術治療中に、センサーは執刀医によって、骨または軟組織に直接埋め込まれるか、保護インプラント(例:(股関節、膝間接)プロテーゼなど)に直接付着される。センサー・システムは手術治療中、執刀医に、インプラントおよび軟組織均衡かつ/また配列の位置かつ/また機能を伝える。センサーは、あらかじめ決められた深さでセンサーを解放する穿通性器具によって、直接埋め込まれる。センサーは特定のロッキング系統または接着剤によって、保護インプラントに付着される。センサーは、センサー有効化のための閉鎖の前に、作動される。
【0018】
センサーを埋め込む他の方法として、経皮的治療を通して行われるものがある。特定の場所にセンサーを埋め込む能力は、内部システムを評価するために重要である。様々な直径のセンサーが骨、軟組織、かつ/またインプラントに埋め込むことができる。治療は可視装置、例えば内視鏡、超音波画像診断、CATスキャンなどのもとで適用される。 そのような治療は、局部あるいは局所麻酔のもとで行われることが可能である。評価されるパラメータは文中に定めるものとする。経皮システムは、必要な組織面を穿通する鋭いトロカールとセンサー(複数可)をあらかじめ決められた深さで解放する、配置アームを有する薄い器具が含まれる。器具は、要求された特定の解剖学的位置を決定するのに必要な、ナビゲーション・システムを格納することが可能である。
【0019】
評価されるべきパラメータおよび時間的要因は、埋め込まれたセンサーのために必要とされるエネルギー源を決定する。短期間(5年以内)ならば、電池の使用が可能である。長期間には外部作動機または電力システムの使用、あるいはセンサー・システムにエネルギーを供給する患者の運動エネルギーの使用が必要と思われる。これらの作動システムは、現在利用されることが可能である。センサーはまた、あらかじめ定められた時間、インプラント・サイクル、異常な運動、インプラント摩耗の閾値を監視するよう作動されることが可能である。
【0020】
情報は遠隔測定的に受信される。一つの模範的実施例では、センサーは“作動”するよう、および特定の閾値が超過した場合に必要な情報を送るよう、あらかじめプログラム化される。センサーはまた、作動され、外部受信機に情報を中継するために使用されることが可能である。さらに、適用は特定の薬物、生物、または他の物質を放出したり、また、インプラントの配置やモジュール性を再調整したりする、“スマートなインプラント”の再調整を可能にする。
【0021】
センサー・システムは最初に医師の診療室で作動されて読み取られ、患者がインターネット・アプリケーションなどを通して医師に情報を送る手段を有していれば、さらに患者の家で作動される。
【0022】
ソフトウェアは情報を受信し、それを処理し、そして医療提供者に中継するようプログラム化される。
【0023】
本発明のセンサー・システムは多くの異なる用途を有する。例として、骨粗しょう症の治療に使用されることが可能である。骨粗しょう症は、骨密度が減少され、骨折の危険を高めることを特徴とする、骨の病的状態である。骨ミネラル濃度および骨ミネラル密度が骨の強度に関連することは、一般的によく認められている。
【0024】
骨密度は、筋骨格体系の、非常に重要な評価のパラメータである。骨密度測定は、個人の骨強度を計り、最終的に骨粗しょう症に関連する危険の高さを予測するために使用される。骨粗鬆は骨折、脊髄圧迫、インプラントの緩みを引き起こす。現在、医師は特殊なX線など、外部的な方法を使用している。
【0025】
骨密度の測定ユニットは、骨ミネラル濃度をグラムで表示する。骨密度の変化は骨粗しょう症、骨折治癒機転、応力遮へいによるインプラントの緩みの評価に重要である。他の重要な評価は骨溶解に関する。骨溶解は、骨を沈黙のうちに破壊するもので、それは、ポリエチレンなどの軸受磨耗の病的な宿主反応である。ポリエチレンの粒子は、インプラントを覆う骨に初期の影響を及ぼす、免疫性肉芽種性の反応を活発にする。骨密度の変化は、深刻な骨粗鬆およびインプラント不全に通じる嚢胞性変化に先立って生じる。
【0026】
骨密度を評価できる多数の外部システムがある。そのようなシステムの問題として数えられることは、システムそのものが多種にわたることに関連することであり、しかしまた、痛みを伴わない病気を評価するために患者が診療所を訪れることに対する社会経済制約に関することで、この問題は、長期間にわたる評価にかかる費用を収縮することに連結する。
【0027】
本発明によって使用されるセンサーは、骨密度変化の評価を可能にし、医療提供者がリアルタイムの内部データをわかるようになる。センサーの適用は、骨粗しょう症とその進行かつ/また治療に対する反応を評定することが可能である。骨密度の変化を評価することにより、センサーは、骨折治療機転および骨溶解の初期変化(インプラントを磨耗するポリスチレンに関する骨の変化)に関する初期の情報を提供する。
【0028】
様式が異なれば器具も様々になるが、すべてに、骨および軟組織を通過する際のエネルギー発信の減衰が記録されている。結果の比較は、骨の太さとスキャンされた部位の一定な関係を前提とする、等しい形の骨格が限定されるのに必要である。さらに、測定は厳密に骨格位置特異的である。ゆえに、個体は、検査される骨格が同一場所である場合のみ、比較される。
【0029】
複数の解剖学的位置での、骨ミネラル濃度の少量の変化の検出には、二重エネルギーX線が使用されることが可能である。この技術の大きな不利点は、試験者が皮質骨と骨梁を区別できないことである。定量的超音波法は、骨ミネラル濃度のみを測定する他の骨密度方法と比較して、機械的完全性など、付加的な骨の特性を測定できる。骨を伝わる超音波伝播は、骨量、骨構築、負荷の方向性による影響を受ける。定量的超音波法による測定法は、骨の強度および硬度を評価する測定として、受信された超音波信号の処理に基づく。音波および超音波の速度は、骨および軟組織を通って伝播する。大腿/頸骨/寛骨の、またはプロテーゼの、人工装具の弛緩または沈降、および破壊は、骨粗鬆に関連する。したがって、人工関節の骨ミネラル濃度の、進行性の定量変化の正確な評価は、関節形成補正の継ぎ骨を保存するための介入時に、外科処置の決定の手助けとなり得る。この情報は、骨粗しょう症性骨のインプラントの開発に役立ち、骨粗しょう症の医療処置の評価、および異なるインプラント・コーティングの影響を支援する。
【0030】
本発明のセンサー・システムはインプラント内部の機能を評価するために使用されることが可能である。インプラント実機能の現在の知識は乏しい。医師は、X線、骨スキャン、患者査定などの外部の手法を使用し続けている。しかし、それらは、切開手術による診査を用いた機能の実際の検査にのみ、典型的に残っている。本発明によるセンサーの使用は、インプラントの早期の不調および切迫した突発故障を検出できる。そのようなものとして、早期介入がなされることが可能である。これは、つまり、患者の病的状態を減少させ、将来の医療コストを減少させ、患者の生活の質を向上させるのである。
【0031】
センサーは、インプラントの表面(手術前/また手術時)かつ/また、骨インプラントの接合部分に、直接付着させることができる。センサーはその上、骨および軟組織の中に埋め込むことができる。そのような用途では、医師は、インプラント宿主体系の重要なパラメータを評価することができる。測定され得るパラメータの例としては、インプラント安定性、インプラント動作、インプラント磨耗、インプラントのサイクル時間、インプラント識別、インプラント圧力/負荷、インプラント統合、滑液分析、関節表面情報、靭帯機能、などである。
【0032】
本発明によるセンサーの適用は、インプラントが不安定であるか、かつ/また動作過度または沈下が起きているかの判断を可能にする。適用の例としては、センサーは、統合を増強するために、作動され埋め込まれたモジュールからオーソバイオロジックを放出するよう、構成されることが可能である。またさらに、センサーによるインプラント・システムは、必要に応じて、インプラントを安定させるよう角度/オフセット/軟組織の張力を調整するために使用されることが可能である。
【0033】
センサーは、インプラント軸受けが磨耗しているかどうかを検出するために使用されることが可能である。検出可能な軸受パラメータには、早期磨耗、摩擦増大などが含まれる。センサーからの早期のアラーム警告は突発事故の前に早期に軸受の変更を可能にする。
【0034】
関節インプラント・センサーは熱、酸、または他の物理的特性の増大を検出することが可能である。そのような認識は、医師に初期感染の警告を提供し得る。感染治療適用の例として、センサーは、抗生剤を放出する、埋め込まれたモジュールを作動できる。
【0035】
センサーは膝手術を分析するために使用される。そのようなセンサーは、膝窩動脈の血流、圧力、かつ/また律動を評価するために膝後方に設置される。大腿部インプラント・センサーは、大腿動脈/静脈の血流、圧力、かつ/また律動を測定するために、前方に配置される。血管内部のモニターは、インプラントの一部分になることが可能で、必要に応じて、血管の変化を修正するため、降圧剤または不整脈治療剤モジュールを開放する装置が含まれることが、可能である。
【0036】
一つの実施例に、本発明のセンサー自体が内部の整形外科用インプラントになるものがある。例えば、外傷状態では、収縮スクリューが、インプラントとセンサー両方になることが可能である。そのようなスクリューは、骨折部の異常な動きを検出し、濃度が高くなること(すなわち治癒)を確認することが可能である。そのような用途は、治療や金属器具の経皮的調整を支援する、骨形態形成蛋白質(BMP)の経皮的移植を可能にする。
【0037】
本発明のセンサーは、脊椎インプラントに使用することができる。脊柱/脊椎に設置されたセンサーは、融合部の異常な動きを検出することが可能である。センサーは、脊椎分節に近接する脊椎インプラントの統合性を評価し、かつ/また近接する脊椎分節の不安定性を検出する。埋め込まれたセンサーは、遷移、安定化システムまたはインプラントを作動することが可能で、また、金属器具またはオーソバイオロジックから経費的安定性を得られるよう、超過動作範囲を決定することが可能である。詳細に描かれた図を参照する。まず、図1は、脊柱の融合部分の部分的な側面図である。上部脊椎10は、下部脊椎20と板30によって分けられている。骨移植片40ははじめに下関節窩50で、次に上関節窩60によって覆われている。図2は図1の脊中部分の上下方向の図で、骨移植片40が板30の両側に横突起70に対して示されている。本発明によるセンサー1は、動作に関する情報および脊椎10、20の負荷を検出かつ伝達することが可能で、様々な脊柱構成要素に埋め込まれる。要素には脊椎茎80、横突起70、椎間関節などが含まれることが可能である。
【0038】
図1および2は、本発明のセンサーの器具を備えていない脊柱の融合部での可能な使用法を表す。センサー1は、術後期の可変時間において作動される。例として、融合“塊”周辺の、異常なまたは超過な運動は、癒着不能を検出するのに役立つ。
【0039】
図3は本発明によるセンサー1の器具を備えた脊柱融合部での可能な使用法を表す。より具体的に、センサー1は下脊椎板110と上脊椎板120の間の“ケージ”器具130の中に内蔵される。そのようなセンサー1は動作および負荷を検出し、融合塊が固形化したかどうかの判断に役立つ、術後期の情報を伝送するよう作動される。
【0040】
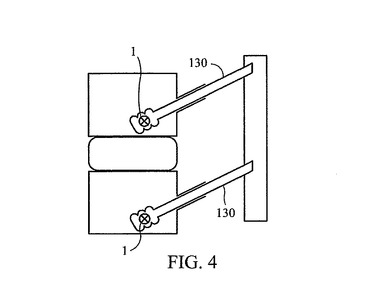
図4は本発明によるセンサー1のペディクル・スクリュー130内での可能な使用法を表す。より具体的に、センサー1は脊椎と融合塊内の異常な動きを検出するのに役立つよう、ペディクル・スクリュー130の中に内蔵される。
【0041】
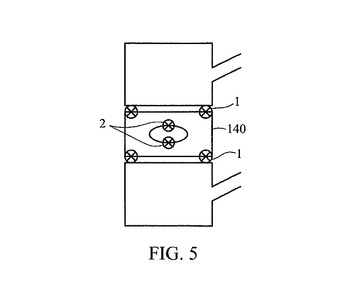
図5は本発明によるセンサー1の、椎間板インプラント(リプレースメント)での可能な使用法を表す。より具体的に、例として、人工板リプレースメント140は、金属−骨接合部に設置されたセンサー1を有する。これらのセンサー1は、手術時、板140の交換時、術後の、板と骨の接合部の安定した統合を判断するのに役立つ、動作だけでなく負荷も検出する。内部センサー2は、術後の、ディスク・リプレースメントの機能の確認および様々な負荷と脊椎運動に応じたレベルの最適化に役立つよう、関節板内部接合間の“正常な”動作を検出する。
【0042】
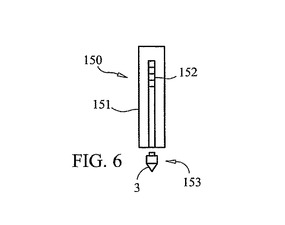
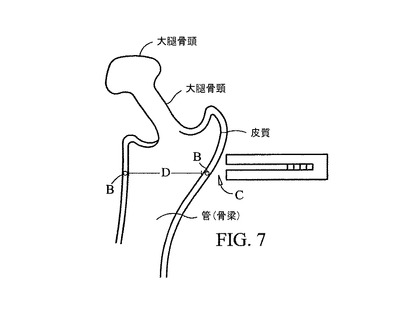
図6は、ハンドル151とプランジャ152を有する器具150を配置したセンサーを表す。ハンドル151とプランジャ152は、トロカール153の一部であるセンサー3の挿入が可能である。トロカール153は外皮を貫通し、センサー3が配置されることが可能である。図7は大腿骨へのセンサー3の挿入を表し、図8は脊椎のセンサー3の挿入を表している。センサー3は次に、ねじを回すか突起を回転させるかして外すことなどにより、共役機構154から分離される。これらの身体部分は、骨粗しょう症、および骨粗しょう症に関連する外傷に関して、最も一般に作用するため、例として使用される。センサー3は数ミリから1センチ以上まで、様々なサイズが可能である。センサーは経皮的に、あるいは切開手術の手法で埋め込まれることができる。
【0043】
センサー3は、股関節かつ/また脊柱の金属器具の一部になり得る。センサー3は、骨梁だけでなく皮質の評価が可能になるよう、様々な深さに設置することができる。二つのセンサー3が配備された場合、その間の距離は、問題部位と発生しうる電力場によって決定されることが可能である。エネルギー場は、超音波、無線周波数、かつ/また電磁場など、標準エネルギー源であり得る。エネルギー波の経時的な偏差は、例として、評価の対象のパラメータの変化の検出を可能にする。
【0044】
図6から8による模範的な外部監視センサー・システムは、骨ミネラル濃度及び密度の夜間の記録を可能にする。センサー・システムはまた、骨への模倣負荷や骨ミネラル濃度および密度の増進を促すなど、エネルギー波を様々なパターンで伝達することを、可能にし得る。センサーはまた、インプラントを経てエネルギー波を送ることが可能であるので、ゆえに、骨折治療の支援をする。
【0045】
股関節および脊柱脊椎の骨折は、骨粗しょう症または外傷に関して発症する。図9はスクリュー4の内部センサーとしての使用を表す。骨折160は圧縮スクリュー4によって橋架され、センサー4はスクリュー4に埋め込まれる。スクリュー4のセンサー4は骨折場所を横断して、密度基線値を取得するためエネルギーを送り、治療を確認するため、経時による密度の変化を監視する。センサー4は、治癒の支援のため、骨折自体にエネルギー波を送るよう、外部的に作動されることが可能である。センサー4はまた、スクリューと骨の間の動作だけでなく、骨折場所の動作の変化をも検出することができる。そのような情報は、監視および治療の支援をし、また医療提供者が指示どおりの体重負荷を調節できるようにする。骨折が治癒すると、図10および11に示された大転子内のセンサー4が、他の二つのセンサー4にエネルギー波を送るために作動される。これは骨密度の評価が継続されることを可能にする。センサー4は、例えば患者の就寝時などに、センサー・ベッド・システムとともに作動されることが可能である。エネルギー源およびエネルギー受信機は、ベッドの底面などに付着されることが可能である。受信した情報は必要に応じて毎晩評価されることが可能で、通常の電話によって、医師に送られる。センサーの夜間作動は、様々な療法による骨粗しょう症の治療の、特定の間隔の読み込みを可能にする。
【0046】
本発明によるセンサーによる外部および内部のエネルギー波の伝達は、骨折および脊椎融合の治療に使用されることが可能である。
【0047】
超音波、パルス状電磁場、磁場併用、容量結合、および電流方向は、成長因子の規制上昇に影響するものとして研究されている。パルス状超音波は、細胞表面の受容体である“インテグリン”を活性化することが示されており、活性化されると、細胞内のカスケードを産出する。炎症、血管形成、骨治癒機転に関与する蛋白質は明示されている。これらの蛋白質は骨形態形成蛋白質(BMP)−7、アルカリホスタファーゼ、血管内皮成長因子およびインスリン成長因子(IGF)−Iを含む。パルス状電磁場の使用は、骨折治療機転時間を上昇させることが、動物実験で示されている。多様な波形は、異なった方法で骨に作用する。
【0048】
定量的超音波法を使用するセンサー・システムは、踵骨密度を外部的に評価するのに使用されることが可能である。本発明によるシステムは患者のベッドに付着され、そして、図10および11に示されるように、外部超音波の波形の使用により骨密度が評価されることが可能である。エネルギー場の使用は、骨折治療機転処置の刺激となることが示されている。刺激は外部測定によって作用され得るが、しかし内部センサー・システムの使用は波形を変化させ、効果的に骨に“負荷”を与え得る振動信号を発生させることが可能である。この作用は、骨皮質を強化し、骨折および骨粗しょう症治療に効果的に使用されることが、多くの整形外科法によって周知であり、図10に表されている。図10のセンサーは皮質または管にある。エネルギー波形は互いに送信される。エネルギー波形は、外部システムによって、またはそれ自体がセンサーの一部になることにより、作動または受信されることが可能である。同じく、図11は脊椎分節のセンサー4が、エネルギー波形を、外部受信機に互いに送信するのを表す。そのようなシステム/治療は、骨折および骨粗しょう症の治療に使用されることが可能である。
【0049】
本発明によるセンサー・システム主に股関節、脊椎を表すが、身体のあらゆる骨格部分に適用されることが可能である。図12から18は、膝、股関節、脊椎治療のための、本発明によるセンサーの様々な位置づけを表す。
【0050】
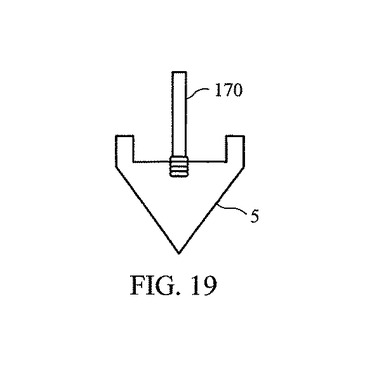
図19および20は、埋め込み可能センサー本体5に、開放ができるよう連結されたハンドル170の、ある模範的な実施例を示す。この実施例では、ハンドルは本体5の適合する雌螺子穴にねじ込む、雄螺子を有している。
【0051】
本発明によるセンサーは、手術中の、関節インプラント位置決めなど、多数の整形外科用途に使用される。使用可能なセンサーおよび監視装置/システムは、Nexense特許に記述されているような、当業者に周知のあらゆるものが含まれ得る。コンピュータが手術を援助することは、言うまでもない。
【0052】
現在、大腿骨および脛骨でのピンの使用は、骨に付着されるための配列を可能にする。そのような付着は、術中の膝/股関節の空間的定位に役立つ。これらの配列は、赤外線光学または電磁気装置(図21および22参照)により、骨に選択されたインプラントを被せる間、手術者が三次元法で関節を可視できる、認識されたソフトウェア・システムの中で情報を再生するために識別される。
そのようなピンの適用で生じる問題は;
術野以外に骨を貫通する必要性、
術後の痛みおよびピン位置からの排膿、
配列および赤外線の遮断可能性および、手術中のピンの弛緩可能性、
処置中の手術者によるピンの現在地を変える必要性、その困難さ、および、
電磁場が、手術に使用する様々な金属機器および器具から受ける影響、
など、多々ある。
【0053】
ピンの挿入、配列の遮断、関節形状の記録に関わる時間は、治療継続時間が著しく長くなる一因となる。膝の形状をコンピュータで可視化できるためには、未だに大腿骨および脛骨のいくつかの点を個々に触診する必要がある。センサーから受信機への情報の伝送時間はまた、遅延の可能性を引き起こす。ゆえに、これらの各問題を減少または撤廃することが望ましい。
【0054】
本発明による手法は、手術分野でのセンサーの埋め込み、手術中のセンサーの使用、術後に様々な目的とするパラメータを評価する、埋め込まれたセンサーの使用が含まれる。
【0055】
図23は大腿骨および脛骨に、図24は膝蓋骨に埋め込まれたセンサー6を示す。靭帯は内側側副靱帯、外側側副靱帯、内側側副靱帯、前十字靱帯、後十字靱帯を含んで図示されている。センサー6は手術に前もって経皮的かつ/また関節鏡視的に、または切開手術中に、埋め込まれる。図25は靭帯または腱、図26はセンサー・クランプと圧縮および開放ハンドル、図27はセンサーの配置を表し、図28は靭帯に配置されたセンサーを明示している。図25から28に表されたステップに示されるように、センサーは、靭帯の周囲に設置され(図27)センサー・クランプ(図26)を具備することによって、靭帯の中に埋め込まれることが可能(図25は靭帯の例)であり、センサーはそこで図28のように固定される。後に図33で示すように、それらはまた、骨の中に埋め込まれることが可能である。角度と深さの配置の誘導には、標準のレントゲン写真技術が使用されることが可能である。
【0056】
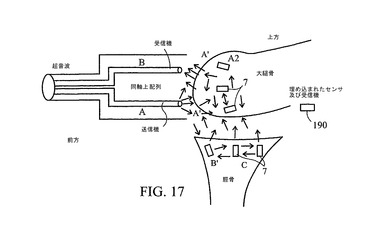
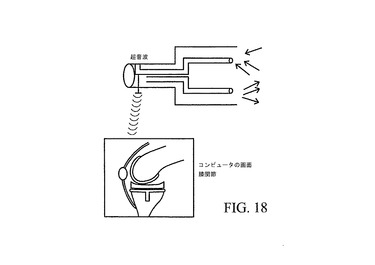
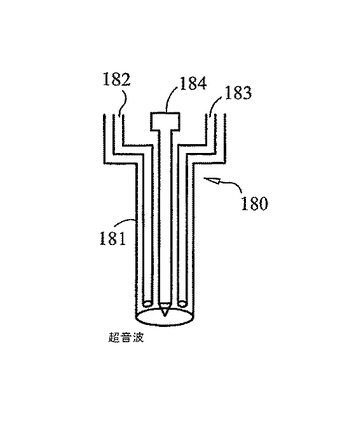
図29に示されるように、超音波カニューレ・システム180は、センサー設置を外部から非放射状に可視化できる。カニューレ181は送信機182および受信機183を格納している。そして、配置センサー184は、挿入用に最適に配置される。超音波アームは、次に、関節の表面の形および深さを迅速に取得するために使用され得る。超音波挿入具は、図17に示されるように、互いに反響しあう多数の埋め込まれたセンサー7にエネルギー波を送り、超音波振動子に返す。図17は音波の反射法を使用した超音波センサー7を表す。音波は骨の端に反射し、埋め込まれたセンサー7は超音波挿入具の中の受信機に返す。図18に示すように、受信機は反射音波を検出し、センサー出力をコンピュータ・スクリーンで可視できるよう作動する。
【0057】
超音波はまた、通過ビームを脛骨に表示する。ここでは、送信機は超音波を分離受信機190に発する。大腿骨/脛骨は受信出力から発射したビームを偏向させる。センサー7のネットワークへの継続的な超音波ビームを反射する、埋め込まれたセンサー7の別の能力は、三次元情報を正確にできることである。センサー7は、不規則な表面および変動する表面温度を補正するようプログラム化されている。骨の測定は、受信された超音波信号の処理に基づいている。音の速さおよび超音波速度はともに、超音波が骨および軟組織を貫通する速さに基づく測定結果を提供する。これらの測定の特性は、迅速に三次元形状を作成し、その情報は、図18に示されるように、外部的にプロテーゼの統合を可能にする、コンピュータ・システムに送られることが可能である。
【0058】
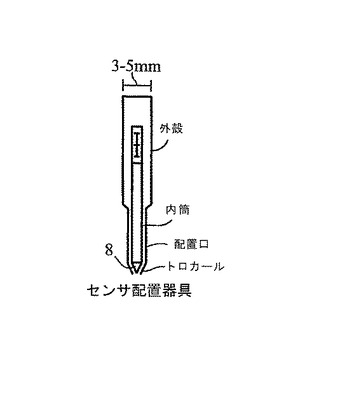
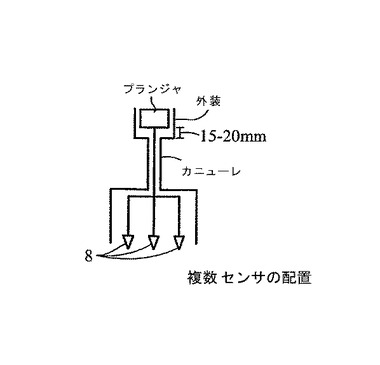
センサー・システムが関節の空間的三次元形状に関する必要な情報を取得するためには、最低限3つのセンサーが、関節を統合する部分の骨にそれぞれ埋め込まれる必要がある。センサーの配置は、一つまたは複数のセンサー(図31)を有した一つのカニューレ(図30)または、多数のセンサーが配置されたカニューレ(図32)によることができる。センサーは皮膚、筋肉、靭帯、腱、軟骨、骨を貫通し得る、目盛りのあるトロカールを有する。図33は、軟組織が排除され軟骨と骨が切開された、膝切開手術時の、センサーの配置を表す。ハンドル190は、センサー配置の深さを調節するプランジャ191を格納している。図34から37を見ると、最小深さは、プロテーゼまたはインプラントが埋め込まれるために切開される、軟骨および骨の量によって決定される。例として、大腿骨および脛骨では、最低10から15ミリ切開される。センサーは、切開に対して、処置中に除去されず、また術後期に使用されることができるような深さに配置される。トロカール・チップはセンサーの構成要素を収納し(図34)、また、配置に望ましい深さに到達したうえで、センサー8はロッキング装置(図19)の放出によって挿入される。装置は、螺子止めまたは回して開錠する接合部、離脱または他の分断装置などが可能である。
【0059】
センサー・システムが挿入されると、使用される外部エネルギー波は、超音波または電磁波になり得る。光学アレイの手法は、ゆえに回避できる。様々な媒体(軟骨および骨)を通るエネルギー波の偏差およびエネルギー波の時間因子は、センサー8によって受信され、かつ/また外部受信機に反射して返される。様々なセンサー8を有することにより、三次元モデルが表される。これは、手術者がセンサーを埋め込み(図33)、それらを手術中に使用できるよう(図18、22)、そして手術後に使用できるよう、それらを埋め込んだまま残しておくことが可能になる。したがって、情報伝達スピードは大幅に上昇し処理されるであろう。
【0060】
図23および24は、膝関節軟組織のいくつかの構成要素を表す。前十字靭帯、後十字靭帯は、膝関節手術の間の平衡にとって重要である。センサーは腱の靭帯にクリップ装置によって埋め込まれる(図25から28参照)。情報は受信され、コンピュータ援助による関節手術装置に統合されるソフトウェア・システムによって処理され、関節手術中の視覚アナログ(図22)を提示する。靭帯の張力、圧力、せん断などが評価される。軟組織の平衡グリッドは、軟組織開放および要素の循環に関する、手術者のアプローチを支援する。
【0061】
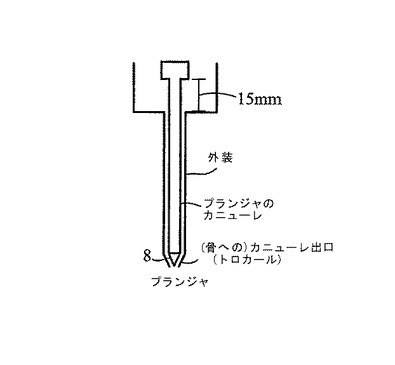
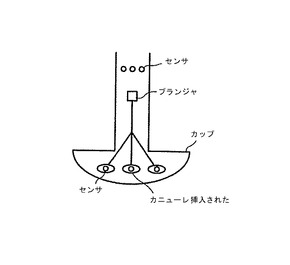
図38は股関節の、同様のセンサーを表す。挿入具は、図38に示される単一センサー挿入具と同様か、もしくは図38に示されているように改正されることが可能である。挿入具は、標準の股関節手術に使用される、カニューレを挿入する寛骨臼リーマーとなるよう形状が決められている。ハンドル200は構造を安定化させ、センサー8はハンドルのプランジャを押圧することにより配置される。図40はカップ・センサー挿入具を表す。カニューレ穴はセンサー9の配置を可能にする。構成は図29に類似して、身体骨格を可視できる超音波構成部を含むよう、改正されることが可能である。
【0062】
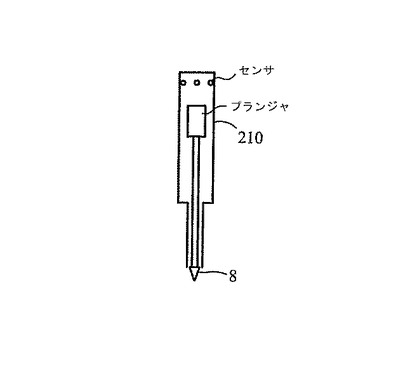
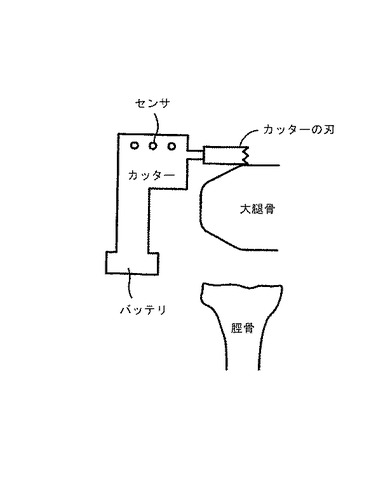
図34から37は、“スマートな”挿入具および“スマートな”器具の配置を表す。挿入具/器具のハンドル210は、プロテーゼおよびセンサーの挿入(図35および37)同様、骨の切除(図36)を正確にするための、一連のセンサー8を収納している。これらのセンサー8は、超音波/電磁気振動子および受信機によって空間的に識別され、インプラント/骨接合部分が適切に準備されたか、そしてインプラントが適切な深さおよび角度で挿入されたかを確認できるようにする。接着またはプレスで合わされた構成材の安定性は、試験されることが可能である。手術中または手術前にプロテーゼに埋め込まれたセンサーはまた、正確な挿入およびプロテーゼの定位を可能にする。手術後のインプラント評価も、実行する。
【0063】
図39はセンサー8の大腿骨への挿入を表す。センサー8は裏表から、裏返しに配置されるか、もしくはプロテーゼのセントラライザーの末端、または導管リストリクター内に内蔵されることが、可能である。
【0064】
図41は二つの脊椎分節の側面図を表す。センサー・挿入具は、経皮的手法によって椎体内のセンサーの配置が図示されている。図42は、一つの脊椎レベルの軸方向の図を示す。センサー9は、器具のために準備された茎を通して、埋め込まれている。
【0065】
プロテーゼ挿入に続く、センサー・システムの埋め込みは図12に、プロテーゼの前面図で表されており、膝関節、大腿骨、脛骨のプロテーゼ、ポリエチレン・インプラント、埋め込まれたセンサーが図示されている。図13は、センサー・システムを有するプロテーゼが埋め込まれた、膝関節の側面図を表す。図14は、センサー・システムが埋め込まれた股関節プロテーゼの全面を表す。図15は、脊椎の二つの分節およびインプラント内に埋め込まれた、センサーの側面図を表す。図16は、椎体内のセンサー・システムを、プロテーゼ/インプラントの上位(軸方向)図で表す。
【0066】
本発明によるセンサー・システムは、関節病状の進行および異なる治療介入に続いて、手術前に使用されることが可能である。システムは手術中に、プロテーゼ/器具/金属器具の埋め込みを支援するために使用されることが可能である。脊柱では、手術中の血管変化、特に手術の是正と同様、神経要素が評価されることが可能である。そしてセンサーは、経時による変化および動力学変化を評価するために、術後に使用されることが可能である。センサーは手術中に作動され、パラメータ測定値は保存される。術後すぐセンサーは作動され、基線が分かる。
【0067】
センサーは、宿主骨および関連する組織の評価が可能であるが、しかしそれは、骨密度、液体粘度、温度、張力、圧力、角状変形、振動、血管/静脈/リンパ管の流れ、負荷、トルク、距離、傾き、形状、弾性、動き、などのみにとどまらない。なぜならば、センサーは関節腔にわたり、インプラント機能の変化を検出できるからである。インプラント機能のいくつかの例を挙げると、軸受磨耗、沈下、骨格統合、正常および異常な動作、心臓、粘度変化、粒状物質、運動学、などが含まれる。
【0068】
センサーは、内部電池または外部の手段によって、電力の投入が可能である。患者は、無線周波または電磁気/超音波エネルギーの使用が可能な、接触作動の必要がないシステムによって、夜間、ベッドで評価を受けられる。センサー・システムのエネルギー信号は、ベッドを通過し、センサーを作動し、ベッドに付着させることができる受信機に、伝送することができる。センサーは様々なパラメータを評価するため、“アップグレード”されて、長期使用が可能である(適正なソフトウェア強化など)。センサーは、フラッシュ・ドライブなどの外部装置によって、修正されることが可能である。例として、埋め込まれたセンサー一式は、器具を備えた脊椎融合部の進行を監視できる。パラメータが確認されると、同じセンサーが、近接する脊椎分節を監視し、ストレスの上昇および、最終的に近接したレベルの亜脱臼を予測するために、再プログラム化されることが可能である。
【0069】
本センサー・システムの他の特徴は、評価期間中、一連のセンサー・パラメータを交代できることである。例として、そのような交代は、患者の就寝中の骨密度の評価、そしてこれに続いて、血管接合部の滑液粘度、軸受面の評価が可能である。そのような評価は、必要に応じて特定の期間、または不規則に時間系列を定めることが可能になる。情報は現存する電話装置で、医療提供者に遠隔測定的に送られることが可能である。同様に、患者は外部センサー作動装置により、診療所にて評価されることが可能である。そして患者は、負荷、トルク、動作、安定性などのパラメータを含むインプラント機能を、医師が評価できるような、一連の動作を完了することができ得る。
【0070】
ソフトウェア・システムは、期間比較ができるマス目に、センサー情報を格納する。そして医師は、基準から外れた偏差が強調されたデータおよび機能を評価し、これらのパラメータはさらに評価される。
【0071】
これらのセンサー・システムは本文中で主に、膝関節、股関節、脊椎に対して検討されたが、システムは体内のいかなる骨格機能に適用されることが可能である。
【0072】
システムの使用は、筋骨格用センサー・システムとして、本発明の記述に説明されている。本発明は、限定されるものではないということが、注目されるものとする。本発明による装置および手法は、あらゆる必要用途に使用されることができる。
【0073】
前述の説明、および付随する図は、本発明の原則、好適な実施例、手術形態を例証する。しかし、本発明は、上記に検討された特殊な実施例に限定されて構成されるべきではない。上記の実施例の他の変化は、当業者によって理解され得る
【0074】
ゆえに、上記の実施例は、制限的なものではなく、実例的なものと見なされるべきである。したがって、付随の特許明細書に定められた本発明の範囲を逸脱することなく、実施例は当業者によって変化され得ることが、理解されるべきである。
【符号の説明】
【0075】
1.2.3.4.5.6.7.8.9.センサー
4.スクリュー
10.上部脊椎
20.下部脊椎
30.板
40.骨移植片
50.下関節窩
60.上関節窩
70.(脊椎)横突起
80.脊椎茎
110.下脊椎板
120.上脊椎板
130.ケージ器具、ペディクル・スクリュー
140.人工板リプレースメント
150.器具
151.ハンドル
152.プランジャ
153.トロカール
154.共役機構
160.骨折
170.ハンドル
180.超音波カニューレ・システム
181.カニューレ
182.送信機
183.受信機
184.配置センサー
190.ハンドル、分離受信機
191.プランジャ
200.ハンドル
210.ハンドル
【技術分野】
【0001】
本発明は、医療機器の分野に関する。特に、生理(例:筋骨格)系統の特定のパラメータを検出し、および活動の正確な解剖学的部位を測定する、外用および組み込みのシステム、および解剖学的部位のパラメータの検出方法に関する。
【背景技術】
【0002】
センサー技術は米国特許番号6,621,278、6,856,141および6,984,993に、Araivに開示され、Nexense社に譲渡された(Nexense特許)。
【0003】
医療専門要員が解剖学的部位の特性を判断できるよう、現存するセンサー技術を生態情報の感覚用途に応用することは、有益であると思われる。
【発明の開示】
【0004】
したがって、本発明のひとつの目的は、特定のパラメータの(例:筋骨格系などの)検出および活動の解剖学的部位の正確な測定が可能であるセンサー技術、および、下記に示される公知の機器の不利点を克服する解剖学的部位のパラメータ検出方法とこの一般化型の方法、および医療提供者が患者のリアルタイム情報を得ることができる、外用かつ/また組み込みセンサーを提供するものである。情報は、外科的処置および埋め込み装置に関するものと同様、病理過程も含むことが可能である。センサーは、内部または外部のメカニズムによる作動が可能で、情報はワイヤレス経路を通って中継される。このセンサー技術は、インプラント・システムの初期介入または変更を可能にし、また現存のセンサーの使用が可能である。例として、Nexense特許開示のセンサーが使用できる。
【0005】
本発明の特性として検討される他の特徴は、添付の特許請求に説明されている。
【0006】
本発明は、特定の身体パラメータを検出し正確な活動の解剖学的部位を判断できるセンサー・システム、および検出の方法を、具象化されたものとしてここに図示および説明されるが、にもかかわらず、本発明の要旨を逸脱しない特許請求と同等の範囲で、種々の変形および構造変化がされ得るため、示される詳細を限定するものではない。
【0007】
本発明の構造および手術の方法はしかし、そのさらなる目的および利点と共に、添付の図に関連して追随する特定の実施例の説明を読むことにより、最も理解されるであろう。
【図面の簡単な説明】
【0008】
本発明の実施例の利点は、追随する好適な実施例の詳細な説明から明らかになり、説明は添付の図と併せて考察されるべきである。
【0009】
【図1】器具を備えていない脊椎の融合部および本発明によるセンサーを有する、脊椎の一部分の、部分側面線図である。
【図2】図1の脊柱部分の、前後方向の部分線図である。
【図3】椎間ケージと本発明によるセンサーを有する、脊柱の一部分の、部分側面線図である。
【図4】スクリュー中に本発明によるセンサーを有する、図1の脊柱部分の、前後方向の部分線図である。
【図5】椎間板インプラントと本発明によるセンサーを有する脊柱の一部分の、部分側面線図である。
【図6】本発明によるセンサー挿入器具の、部分拡大断面線図である。
【図7】図6の器具によって本発明によるセンサーが埋め込まれた上部大腿骨の、部分断面線図である。
【図8】図6の器具によって本発明によるセンサーが埋め込まれた脊椎の、部分断面線図である。
【図9】本発明によるスクリュー中のセンサーを有する大腿骨の、部分断面線図である。
【図10】本発明によるセンサーが埋め込まれた大腿骨の、部分断面線図および、本発明によるセンサーを有する脊椎の、部分断面線図である。
【図11】本発明によるセンサーが埋め込まれた大腿骨の、部分断面線図および、本発明によるセンサーを有する脊椎の、部分断面線図である。
【図12】本発明によるセンサーを有する膝関節の、前後方向の部分断面線図である。
【図13】本発明によるセンサーを有する膝関節の、側面の部分断面線図である。
【図14】本発明によるセンサーを有する股関節の、部分断面線図である。
【図15】本発明によるセンサーを有する脊椎の、側面の部分断面線図である。
【図16】本発明によるセンサーを有する脊椎骨の、部分軸断面線図である。
【図17】本発明による超音波アクティブ・センサーを有する、膝関節の部分断面線図である。
【図18】治療中に、超音波送信機およびコンピュータ・スクリーンが本発明の超音波アクティブ・センサーによって膝関節を表示している、線図である。
【図19】本発明による埋め込みが可能なセンサー本体に接続されているハンドルの、拡大断面線図である。
【図20】センサー本体から切断された、図19のハンドルの、拡大断面線図である。
【図21】赤外線可視化システムの線図である。
【図22】電磁気可視化システムの線図および、膝関節の、一部分を除いた正面から見た部分側面図である。
【図23】膝関節の、一部分を除いた正面から見た部分図である。
【図24】電磁気可視化システムの線図および、膝関節の、一部分を除いた正面から見た部分側面図である。
【図25】靭帯の横部分立面図である。
【図26】本発明による靭帯センサー・クランプを有する、図25の靭帯の、横部分立面図である。
【図27】靭帯および図26の靭帯センサー・クランプの、横部分立面図である。
【図28】本発明によるセンサーが付着された、図25の靭帯の、横部分立面図である。
【図29】本発明による超音波カニューレ・システムの一部分の、断面部分図である。
【図30】本発明による単体センサーのカニューレ配置装置の一部分の、断面部分図である。
【図31】複数のセンサーを有する、図31のカニューレ配置装置の一部分の、断面部分図である。
【図32】本発明による複数センサーのカニューレ配置装置の、断面部分図である。
【図33】本発明によるセンサーが配置された、軟組織および軟骨除去、骨切断の膝切開手術の、横部分立面図である。
【図34】センサー構成要素が格納された、本発明によるトロカール・チップの、部分断面図である。
【図35】一連のセンサーの挿入具の、部分断面図である。
【図36】本発明による一連のセンサーを格納するカッターの、横立面線図である。
【図37】骨リーマーの横立面線図である。
【図38】股関節に埋め込まれた本発明によるセンサー・システムの、断面部分図である。
【図39】大腿骨に埋め込まれた本発明によるセンサー・システムの、断面部分図である。
【図40】複数のセンサー配置用の、本発明によるカップ・センサー挿入具の、断面部分図である。
【図41】二つの脊椎分節と、本発明によるセンサー埋め込みシステムの、側断面部分図である。
【図42】センサーが茎を通って埋め込まれた、脊椎の段階の、軸断面部分図である。
【発明を実施するための形態】
【0010】
本発明の様相は、追随する説明および本発明の特定の実施例に関連する図の中で開示される。他の実施例は、本発明の精神または範囲を逸脱することなく考慮され得る。さらに、本発明に関連した詳細が不明瞭にならないよう、本発明の模範となる実施例の既知の要素は、詳細に説明されることはない、または割愛される。
【0011】
本発明の開示および説明の前に、本文中に使用される専門用語は特定の実施例を説明する目的にのみのためであって、限定する意図のものではないことを理解されるものとする。明細書および付随する特許請求の中で使用される単数形(a,an,the)は、特に明確な指示がない限り、複数に言及されることが注目されなければならない。
【0012】
明細書と本発明の特徴を定義づける特許請求は、新規であるとされたことを断定し、本発明は、追随する説明と図を連結しての検討から理解されることが、より良いと考えられるが、ここでは同じ参照番号は繰り越される。図の図形は、縮尺どおりではない。
【0013】
本発明による外用適用のセンサー・システムは、皮膚の完全性および、皮膚の虚血および最終的に皮膚の損傷(褥瘡)を引き起こす病的圧力を評価するのに使用されることが可能である。皮膚の損傷を引き起こす、正確なパラメータを検出することは、重要である。例として、圧力、時間、せん断、血流などの要素が、検出に重要であり、特定の解剖学的位置が必要とされる。
【0014】
本発明のセンサー・システムは、特定の問題部位に適用される、薄い接着性の適合材料に埋め込まれることが可能である。例とする部位は、踵、股関節、仙骨などであり、他の部位は危険を伴う。これらのセンサーは、解剖学的部位を決定する。閾値パラメータが超過した場合、センサーは遠隔測定受信を通知し、次に、アラームを作動し、看護士や他の医療専門家に通知する。ある特定の用途で、情報は患者が問題部位の治療のため横たわるベッドを調節するために使用される。特に、マットレスのエアーセルの調節は、問題患部の負荷を軽くし得る。
【0015】
外用センサー・システムは様々な方法で構成されることが可能である。模範的実施例では、センサーは 患者の身体に直接適用される、薄い、適合する粘着性のものの中に配置され、薄いリチウム電池を動力とする。センサー(複数可)は、圧力、時間、せん断、血流など特定のパラメータを記録する。センサーは、受信ユニットを遠隔測定的に通知し、あらかじめ一定にプログラム化されたパラメータが超過した場合のアラームを設定する。ひとつの実施例中には、コンピュータ・スクリーンが患者の身体の輪郭を表示し、特定の問題部位が強調表示され、それによって医療専門家によって可視化されることが可能であるような、視覚補助機器が設けられている。
【0016】
埋め込みセンサーは、人間の目で直接見ることができない、特定の内部パラメータを検出することが必要とされる。これらのセンサーは、特定のパラメータを検出する特定の場所に使用され得る。
【0017】
センサーを埋め込む一つの方法は、切開手術治療を経るものである。そのような手術治療中に、センサーは執刀医によって、骨または軟組織に直接埋め込まれるか、保護インプラント(例:(股関節、膝間接)プロテーゼなど)に直接付着される。センサー・システムは手術治療中、執刀医に、インプラントおよび軟組織均衡かつ/また配列の位置かつ/また機能を伝える。センサーは、あらかじめ決められた深さでセンサーを解放する穿通性器具によって、直接埋め込まれる。センサーは特定のロッキング系統または接着剤によって、保護インプラントに付着される。センサーは、センサー有効化のための閉鎖の前に、作動される。
【0018】
センサーを埋め込む他の方法として、経皮的治療を通して行われるものがある。特定の場所にセンサーを埋め込む能力は、内部システムを評価するために重要である。様々な直径のセンサーが骨、軟組織、かつ/またインプラントに埋め込むことができる。治療は可視装置、例えば内視鏡、超音波画像診断、CATスキャンなどのもとで適用される。 そのような治療は、局部あるいは局所麻酔のもとで行われることが可能である。評価されるパラメータは文中に定めるものとする。経皮システムは、必要な組織面を穿通する鋭いトロカールとセンサー(複数可)をあらかじめ決められた深さで解放する、配置アームを有する薄い器具が含まれる。器具は、要求された特定の解剖学的位置を決定するのに必要な、ナビゲーション・システムを格納することが可能である。
【0019】
評価されるべきパラメータおよび時間的要因は、埋め込まれたセンサーのために必要とされるエネルギー源を決定する。短期間(5年以内)ならば、電池の使用が可能である。長期間には外部作動機または電力システムの使用、あるいはセンサー・システムにエネルギーを供給する患者の運動エネルギーの使用が必要と思われる。これらの作動システムは、現在利用されることが可能である。センサーはまた、あらかじめ定められた時間、インプラント・サイクル、異常な運動、インプラント摩耗の閾値を監視するよう作動されることが可能である。
【0020】
情報は遠隔測定的に受信される。一つの模範的実施例では、センサーは“作動”するよう、および特定の閾値が超過した場合に必要な情報を送るよう、あらかじめプログラム化される。センサーはまた、作動され、外部受信機に情報を中継するために使用されることが可能である。さらに、適用は特定の薬物、生物、または他の物質を放出したり、また、インプラントの配置やモジュール性を再調整したりする、“スマートなインプラント”の再調整を可能にする。
【0021】
センサー・システムは最初に医師の診療室で作動されて読み取られ、患者がインターネット・アプリケーションなどを通して医師に情報を送る手段を有していれば、さらに患者の家で作動される。
【0022】
ソフトウェアは情報を受信し、それを処理し、そして医療提供者に中継するようプログラム化される。
【0023】
本発明のセンサー・システムは多くの異なる用途を有する。例として、骨粗しょう症の治療に使用されることが可能である。骨粗しょう症は、骨密度が減少され、骨折の危険を高めることを特徴とする、骨の病的状態である。骨ミネラル濃度および骨ミネラル密度が骨の強度に関連することは、一般的によく認められている。
【0024】
骨密度は、筋骨格体系の、非常に重要な評価のパラメータである。骨密度測定は、個人の骨強度を計り、最終的に骨粗しょう症に関連する危険の高さを予測するために使用される。骨粗鬆は骨折、脊髄圧迫、インプラントの緩みを引き起こす。現在、医師は特殊なX線など、外部的な方法を使用している。
【0025】
骨密度の測定ユニットは、骨ミネラル濃度をグラムで表示する。骨密度の変化は骨粗しょう症、骨折治癒機転、応力遮へいによるインプラントの緩みの評価に重要である。他の重要な評価は骨溶解に関する。骨溶解は、骨を沈黙のうちに破壊するもので、それは、ポリエチレンなどの軸受磨耗の病的な宿主反応である。ポリエチレンの粒子は、インプラントを覆う骨に初期の影響を及ぼす、免疫性肉芽種性の反応を活発にする。骨密度の変化は、深刻な骨粗鬆およびインプラント不全に通じる嚢胞性変化に先立って生じる。
【0026】
骨密度を評価できる多数の外部システムがある。そのようなシステムの問題として数えられることは、システムそのものが多種にわたることに関連することであり、しかしまた、痛みを伴わない病気を評価するために患者が診療所を訪れることに対する社会経済制約に関することで、この問題は、長期間にわたる評価にかかる費用を収縮することに連結する。
【0027】
本発明によって使用されるセンサーは、骨密度変化の評価を可能にし、医療提供者がリアルタイムの内部データをわかるようになる。センサーの適用は、骨粗しょう症とその進行かつ/また治療に対する反応を評定することが可能である。骨密度の変化を評価することにより、センサーは、骨折治療機転および骨溶解の初期変化(インプラントを磨耗するポリスチレンに関する骨の変化)に関する初期の情報を提供する。
【0028】
様式が異なれば器具も様々になるが、すべてに、骨および軟組織を通過する際のエネルギー発信の減衰が記録されている。結果の比較は、骨の太さとスキャンされた部位の一定な関係を前提とする、等しい形の骨格が限定されるのに必要である。さらに、測定は厳密に骨格位置特異的である。ゆえに、個体は、検査される骨格が同一場所である場合のみ、比較される。
【0029】
複数の解剖学的位置での、骨ミネラル濃度の少量の変化の検出には、二重エネルギーX線が使用されることが可能である。この技術の大きな不利点は、試験者が皮質骨と骨梁を区別できないことである。定量的超音波法は、骨ミネラル濃度のみを測定する他の骨密度方法と比較して、機械的完全性など、付加的な骨の特性を測定できる。骨を伝わる超音波伝播は、骨量、骨構築、負荷の方向性による影響を受ける。定量的超音波法による測定法は、骨の強度および硬度を評価する測定として、受信された超音波信号の処理に基づく。音波および超音波の速度は、骨および軟組織を通って伝播する。大腿/頸骨/寛骨の、またはプロテーゼの、人工装具の弛緩または沈降、および破壊は、骨粗鬆に関連する。したがって、人工関節の骨ミネラル濃度の、進行性の定量変化の正確な評価は、関節形成補正の継ぎ骨を保存するための介入時に、外科処置の決定の手助けとなり得る。この情報は、骨粗しょう症性骨のインプラントの開発に役立ち、骨粗しょう症の医療処置の評価、および異なるインプラント・コーティングの影響を支援する。
【0030】
本発明のセンサー・システムはインプラント内部の機能を評価するために使用されることが可能である。インプラント実機能の現在の知識は乏しい。医師は、X線、骨スキャン、患者査定などの外部の手法を使用し続けている。しかし、それらは、切開手術による診査を用いた機能の実際の検査にのみ、典型的に残っている。本発明によるセンサーの使用は、インプラントの早期の不調および切迫した突発故障を検出できる。そのようなものとして、早期介入がなされることが可能である。これは、つまり、患者の病的状態を減少させ、将来の医療コストを減少させ、患者の生活の質を向上させるのである。
【0031】
センサーは、インプラントの表面(手術前/また手術時)かつ/また、骨インプラントの接合部分に、直接付着させることができる。センサーはその上、骨および軟組織の中に埋め込むことができる。そのような用途では、医師は、インプラント宿主体系の重要なパラメータを評価することができる。測定され得るパラメータの例としては、インプラント安定性、インプラント動作、インプラント磨耗、インプラントのサイクル時間、インプラント識別、インプラント圧力/負荷、インプラント統合、滑液分析、関節表面情報、靭帯機能、などである。
【0032】
本発明によるセンサーの適用は、インプラントが不安定であるか、かつ/また動作過度または沈下が起きているかの判断を可能にする。適用の例としては、センサーは、統合を増強するために、作動され埋め込まれたモジュールからオーソバイオロジックを放出するよう、構成されることが可能である。またさらに、センサーによるインプラント・システムは、必要に応じて、インプラントを安定させるよう角度/オフセット/軟組織の張力を調整するために使用されることが可能である。
【0033】
センサーは、インプラント軸受けが磨耗しているかどうかを検出するために使用されることが可能である。検出可能な軸受パラメータには、早期磨耗、摩擦増大などが含まれる。センサーからの早期のアラーム警告は突発事故の前に早期に軸受の変更を可能にする。
【0034】
関節インプラント・センサーは熱、酸、または他の物理的特性の増大を検出することが可能である。そのような認識は、医師に初期感染の警告を提供し得る。感染治療適用の例として、センサーは、抗生剤を放出する、埋め込まれたモジュールを作動できる。
【0035】
センサーは膝手術を分析するために使用される。そのようなセンサーは、膝窩動脈の血流、圧力、かつ/また律動を評価するために膝後方に設置される。大腿部インプラント・センサーは、大腿動脈/静脈の血流、圧力、かつ/また律動を測定するために、前方に配置される。血管内部のモニターは、インプラントの一部分になることが可能で、必要に応じて、血管の変化を修正するため、降圧剤または不整脈治療剤モジュールを開放する装置が含まれることが、可能である。
【0036】
一つの実施例に、本発明のセンサー自体が内部の整形外科用インプラントになるものがある。例えば、外傷状態では、収縮スクリューが、インプラントとセンサー両方になることが可能である。そのようなスクリューは、骨折部の異常な動きを検出し、濃度が高くなること(すなわち治癒)を確認することが可能である。そのような用途は、治療や金属器具の経皮的調整を支援する、骨形態形成蛋白質(BMP)の経皮的移植を可能にする。
【0037】
本発明のセンサーは、脊椎インプラントに使用することができる。脊柱/脊椎に設置されたセンサーは、融合部の異常な動きを検出することが可能である。センサーは、脊椎分節に近接する脊椎インプラントの統合性を評価し、かつ/また近接する脊椎分節の不安定性を検出する。埋め込まれたセンサーは、遷移、安定化システムまたはインプラントを作動することが可能で、また、金属器具またはオーソバイオロジックから経費的安定性を得られるよう、超過動作範囲を決定することが可能である。詳細に描かれた図を参照する。まず、図1は、脊柱の融合部分の部分的な側面図である。上部脊椎10は、下部脊椎20と板30によって分けられている。骨移植片40ははじめに下関節窩50で、次に上関節窩60によって覆われている。図2は図1の脊中部分の上下方向の図で、骨移植片40が板30の両側に横突起70に対して示されている。本発明によるセンサー1は、動作に関する情報および脊椎10、20の負荷を検出かつ伝達することが可能で、様々な脊柱構成要素に埋め込まれる。要素には脊椎茎80、横突起70、椎間関節などが含まれることが可能である。
【0038】
図1および2は、本発明のセンサーの器具を備えていない脊柱の融合部での可能な使用法を表す。センサー1は、術後期の可変時間において作動される。例として、融合“塊”周辺の、異常なまたは超過な運動は、癒着不能を検出するのに役立つ。
【0039】
図3は本発明によるセンサー1の器具を備えた脊柱融合部での可能な使用法を表す。より具体的に、センサー1は下脊椎板110と上脊椎板120の間の“ケージ”器具130の中に内蔵される。そのようなセンサー1は動作および負荷を検出し、融合塊が固形化したかどうかの判断に役立つ、術後期の情報を伝送するよう作動される。
【0040】
図4は本発明によるセンサー1のペディクル・スクリュー130内での可能な使用法を表す。より具体的に、センサー1は脊椎と融合塊内の異常な動きを検出するのに役立つよう、ペディクル・スクリュー130の中に内蔵される。
【0041】
図5は本発明によるセンサー1の、椎間板インプラント(リプレースメント)での可能な使用法を表す。より具体的に、例として、人工板リプレースメント140は、金属−骨接合部に設置されたセンサー1を有する。これらのセンサー1は、手術時、板140の交換時、術後の、板と骨の接合部の安定した統合を判断するのに役立つ、動作だけでなく負荷も検出する。内部センサー2は、術後の、ディスク・リプレースメントの機能の確認および様々な負荷と脊椎運動に応じたレベルの最適化に役立つよう、関節板内部接合間の“正常な”動作を検出する。
【0042】
図6は、ハンドル151とプランジャ152を有する器具150を配置したセンサーを表す。ハンドル151とプランジャ152は、トロカール153の一部であるセンサー3の挿入が可能である。トロカール153は外皮を貫通し、センサー3が配置されることが可能である。図7は大腿骨へのセンサー3の挿入を表し、図8は脊椎のセンサー3の挿入を表している。センサー3は次に、ねじを回すか突起を回転させるかして外すことなどにより、共役機構154から分離される。これらの身体部分は、骨粗しょう症、および骨粗しょう症に関連する外傷に関して、最も一般に作用するため、例として使用される。センサー3は数ミリから1センチ以上まで、様々なサイズが可能である。センサーは経皮的に、あるいは切開手術の手法で埋め込まれることができる。
【0043】
センサー3は、股関節かつ/また脊柱の金属器具の一部になり得る。センサー3は、骨梁だけでなく皮質の評価が可能になるよう、様々な深さに設置することができる。二つのセンサー3が配備された場合、その間の距離は、問題部位と発生しうる電力場によって決定されることが可能である。エネルギー場は、超音波、無線周波数、かつ/また電磁場など、標準エネルギー源であり得る。エネルギー波の経時的な偏差は、例として、評価の対象のパラメータの変化の検出を可能にする。
【0044】
図6から8による模範的な外部監視センサー・システムは、骨ミネラル濃度及び密度の夜間の記録を可能にする。センサー・システムはまた、骨への模倣負荷や骨ミネラル濃度および密度の増進を促すなど、エネルギー波を様々なパターンで伝達することを、可能にし得る。センサーはまた、インプラントを経てエネルギー波を送ることが可能であるので、ゆえに、骨折治療の支援をする。
【0045】
股関節および脊柱脊椎の骨折は、骨粗しょう症または外傷に関して発症する。図9はスクリュー4の内部センサーとしての使用を表す。骨折160は圧縮スクリュー4によって橋架され、センサー4はスクリュー4に埋め込まれる。スクリュー4のセンサー4は骨折場所を横断して、密度基線値を取得するためエネルギーを送り、治療を確認するため、経時による密度の変化を監視する。センサー4は、治癒の支援のため、骨折自体にエネルギー波を送るよう、外部的に作動されることが可能である。センサー4はまた、スクリューと骨の間の動作だけでなく、骨折場所の動作の変化をも検出することができる。そのような情報は、監視および治療の支援をし、また医療提供者が指示どおりの体重負荷を調節できるようにする。骨折が治癒すると、図10および11に示された大転子内のセンサー4が、他の二つのセンサー4にエネルギー波を送るために作動される。これは骨密度の評価が継続されることを可能にする。センサー4は、例えば患者の就寝時などに、センサー・ベッド・システムとともに作動されることが可能である。エネルギー源およびエネルギー受信機は、ベッドの底面などに付着されることが可能である。受信した情報は必要に応じて毎晩評価されることが可能で、通常の電話によって、医師に送られる。センサーの夜間作動は、様々な療法による骨粗しょう症の治療の、特定の間隔の読み込みを可能にする。
【0046】
本発明によるセンサーによる外部および内部のエネルギー波の伝達は、骨折および脊椎融合の治療に使用されることが可能である。
【0047】
超音波、パルス状電磁場、磁場併用、容量結合、および電流方向は、成長因子の規制上昇に影響するものとして研究されている。パルス状超音波は、細胞表面の受容体である“インテグリン”を活性化することが示されており、活性化されると、細胞内のカスケードを産出する。炎症、血管形成、骨治癒機転に関与する蛋白質は明示されている。これらの蛋白質は骨形態形成蛋白質(BMP)−7、アルカリホスタファーゼ、血管内皮成長因子およびインスリン成長因子(IGF)−Iを含む。パルス状電磁場の使用は、骨折治療機転時間を上昇させることが、動物実験で示されている。多様な波形は、異なった方法で骨に作用する。
【0048】
定量的超音波法を使用するセンサー・システムは、踵骨密度を外部的に評価するのに使用されることが可能である。本発明によるシステムは患者のベッドに付着され、そして、図10および11に示されるように、外部超音波の波形の使用により骨密度が評価されることが可能である。エネルギー場の使用は、骨折治療機転処置の刺激となることが示されている。刺激は外部測定によって作用され得るが、しかし内部センサー・システムの使用は波形を変化させ、効果的に骨に“負荷”を与え得る振動信号を発生させることが可能である。この作用は、骨皮質を強化し、骨折および骨粗しょう症治療に効果的に使用されることが、多くの整形外科法によって周知であり、図10に表されている。図10のセンサーは皮質または管にある。エネルギー波形は互いに送信される。エネルギー波形は、外部システムによって、またはそれ自体がセンサーの一部になることにより、作動または受信されることが可能である。同じく、図11は脊椎分節のセンサー4が、エネルギー波形を、外部受信機に互いに送信するのを表す。そのようなシステム/治療は、骨折および骨粗しょう症の治療に使用されることが可能である。
【0049】
本発明によるセンサー・システム主に股関節、脊椎を表すが、身体のあらゆる骨格部分に適用されることが可能である。図12から18は、膝、股関節、脊椎治療のための、本発明によるセンサーの様々な位置づけを表す。
【0050】
図19および20は、埋め込み可能センサー本体5に、開放ができるよう連結されたハンドル170の、ある模範的な実施例を示す。この実施例では、ハンドルは本体5の適合する雌螺子穴にねじ込む、雄螺子を有している。
【0051】
本発明によるセンサーは、手術中の、関節インプラント位置決めなど、多数の整形外科用途に使用される。使用可能なセンサーおよび監視装置/システムは、Nexense特許に記述されているような、当業者に周知のあらゆるものが含まれ得る。コンピュータが手術を援助することは、言うまでもない。
【0052】
現在、大腿骨および脛骨でのピンの使用は、骨に付着されるための配列を可能にする。そのような付着は、術中の膝/股関節の空間的定位に役立つ。これらの配列は、赤外線光学または電磁気装置(図21および22参照)により、骨に選択されたインプラントを被せる間、手術者が三次元法で関節を可視できる、認識されたソフトウェア・システムの中で情報を再生するために識別される。
そのようなピンの適用で生じる問題は;
術野以外に骨を貫通する必要性、
術後の痛みおよびピン位置からの排膿、
配列および赤外線の遮断可能性および、手術中のピンの弛緩可能性、
処置中の手術者によるピンの現在地を変える必要性、その困難さ、および、
電磁場が、手術に使用する様々な金属機器および器具から受ける影響、
など、多々ある。
【0053】
ピンの挿入、配列の遮断、関節形状の記録に関わる時間は、治療継続時間が著しく長くなる一因となる。膝の形状をコンピュータで可視化できるためには、未だに大腿骨および脛骨のいくつかの点を個々に触診する必要がある。センサーから受信機への情報の伝送時間はまた、遅延の可能性を引き起こす。ゆえに、これらの各問題を減少または撤廃することが望ましい。
【0054】
本発明による手法は、手術分野でのセンサーの埋め込み、手術中のセンサーの使用、術後に様々な目的とするパラメータを評価する、埋め込まれたセンサーの使用が含まれる。
【0055】
図23は大腿骨および脛骨に、図24は膝蓋骨に埋め込まれたセンサー6を示す。靭帯は内側側副靱帯、外側側副靱帯、内側側副靱帯、前十字靱帯、後十字靱帯を含んで図示されている。センサー6は手術に前もって経皮的かつ/また関節鏡視的に、または切開手術中に、埋め込まれる。図25は靭帯または腱、図26はセンサー・クランプと圧縮および開放ハンドル、図27はセンサーの配置を表し、図28は靭帯に配置されたセンサーを明示している。図25から28に表されたステップに示されるように、センサーは、靭帯の周囲に設置され(図27)センサー・クランプ(図26)を具備することによって、靭帯の中に埋め込まれることが可能(図25は靭帯の例)であり、センサーはそこで図28のように固定される。後に図33で示すように、それらはまた、骨の中に埋め込まれることが可能である。角度と深さの配置の誘導には、標準のレントゲン写真技術が使用されることが可能である。
【0056】
図29に示されるように、超音波カニューレ・システム180は、センサー設置を外部から非放射状に可視化できる。カニューレ181は送信機182および受信機183を格納している。そして、配置センサー184は、挿入用に最適に配置される。超音波アームは、次に、関節の表面の形および深さを迅速に取得するために使用され得る。超音波挿入具は、図17に示されるように、互いに反響しあう多数の埋め込まれたセンサー7にエネルギー波を送り、超音波振動子に返す。図17は音波の反射法を使用した超音波センサー7を表す。音波は骨の端に反射し、埋め込まれたセンサー7は超音波挿入具の中の受信機に返す。図18に示すように、受信機は反射音波を検出し、センサー出力をコンピュータ・スクリーンで可視できるよう作動する。
【0057】
超音波はまた、通過ビームを脛骨に表示する。ここでは、送信機は超音波を分離受信機190に発する。大腿骨/脛骨は受信出力から発射したビームを偏向させる。センサー7のネットワークへの継続的な超音波ビームを反射する、埋め込まれたセンサー7の別の能力は、三次元情報を正確にできることである。センサー7は、不規則な表面および変動する表面温度を補正するようプログラム化されている。骨の測定は、受信された超音波信号の処理に基づいている。音の速さおよび超音波速度はともに、超音波が骨および軟組織を貫通する速さに基づく測定結果を提供する。これらの測定の特性は、迅速に三次元形状を作成し、その情報は、図18に示されるように、外部的にプロテーゼの統合を可能にする、コンピュータ・システムに送られることが可能である。
【0058】
センサー・システムが関節の空間的三次元形状に関する必要な情報を取得するためには、最低限3つのセンサーが、関節を統合する部分の骨にそれぞれ埋め込まれる必要がある。センサーの配置は、一つまたは複数のセンサー(図31)を有した一つのカニューレ(図30)または、多数のセンサーが配置されたカニューレ(図32)によることができる。センサーは皮膚、筋肉、靭帯、腱、軟骨、骨を貫通し得る、目盛りのあるトロカールを有する。図33は、軟組織が排除され軟骨と骨が切開された、膝切開手術時の、センサーの配置を表す。ハンドル190は、センサー配置の深さを調節するプランジャ191を格納している。図34から37を見ると、最小深さは、プロテーゼまたはインプラントが埋め込まれるために切開される、軟骨および骨の量によって決定される。例として、大腿骨および脛骨では、最低10から15ミリ切開される。センサーは、切開に対して、処置中に除去されず、また術後期に使用されることができるような深さに配置される。トロカール・チップはセンサーの構成要素を収納し(図34)、また、配置に望ましい深さに到達したうえで、センサー8はロッキング装置(図19)の放出によって挿入される。装置は、螺子止めまたは回して開錠する接合部、離脱または他の分断装置などが可能である。
【0059】
センサー・システムが挿入されると、使用される外部エネルギー波は、超音波または電磁波になり得る。光学アレイの手法は、ゆえに回避できる。様々な媒体(軟骨および骨)を通るエネルギー波の偏差およびエネルギー波の時間因子は、センサー8によって受信され、かつ/また外部受信機に反射して返される。様々なセンサー8を有することにより、三次元モデルが表される。これは、手術者がセンサーを埋め込み(図33)、それらを手術中に使用できるよう(図18、22)、そして手術後に使用できるよう、それらを埋め込んだまま残しておくことが可能になる。したがって、情報伝達スピードは大幅に上昇し処理されるであろう。
【0060】
図23および24は、膝関節軟組織のいくつかの構成要素を表す。前十字靭帯、後十字靭帯は、膝関節手術の間の平衡にとって重要である。センサーは腱の靭帯にクリップ装置によって埋め込まれる(図25から28参照)。情報は受信され、コンピュータ援助による関節手術装置に統合されるソフトウェア・システムによって処理され、関節手術中の視覚アナログ(図22)を提示する。靭帯の張力、圧力、せん断などが評価される。軟組織の平衡グリッドは、軟組織開放および要素の循環に関する、手術者のアプローチを支援する。
【0061】
図38は股関節の、同様のセンサーを表す。挿入具は、図38に示される単一センサー挿入具と同様か、もしくは図38に示されているように改正されることが可能である。挿入具は、標準の股関節手術に使用される、カニューレを挿入する寛骨臼リーマーとなるよう形状が決められている。ハンドル200は構造を安定化させ、センサー8はハンドルのプランジャを押圧することにより配置される。図40はカップ・センサー挿入具を表す。カニューレ穴はセンサー9の配置を可能にする。構成は図29に類似して、身体骨格を可視できる超音波構成部を含むよう、改正されることが可能である。
【0062】
図34から37は、“スマートな”挿入具および“スマートな”器具の配置を表す。挿入具/器具のハンドル210は、プロテーゼおよびセンサーの挿入(図35および37)同様、骨の切除(図36)を正確にするための、一連のセンサー8を収納している。これらのセンサー8は、超音波/電磁気振動子および受信機によって空間的に識別され、インプラント/骨接合部分が適切に準備されたか、そしてインプラントが適切な深さおよび角度で挿入されたかを確認できるようにする。接着またはプレスで合わされた構成材の安定性は、試験されることが可能である。手術中または手術前にプロテーゼに埋め込まれたセンサーはまた、正確な挿入およびプロテーゼの定位を可能にする。手術後のインプラント評価も、実行する。
【0063】
図39はセンサー8の大腿骨への挿入を表す。センサー8は裏表から、裏返しに配置されるか、もしくはプロテーゼのセントラライザーの末端、または導管リストリクター内に内蔵されることが、可能である。
【0064】
図41は二つの脊椎分節の側面図を表す。センサー・挿入具は、経皮的手法によって椎体内のセンサーの配置が図示されている。図42は、一つの脊椎レベルの軸方向の図を示す。センサー9は、器具のために準備された茎を通して、埋め込まれている。
【0065】
プロテーゼ挿入に続く、センサー・システムの埋め込みは図12に、プロテーゼの前面図で表されており、膝関節、大腿骨、脛骨のプロテーゼ、ポリエチレン・インプラント、埋め込まれたセンサーが図示されている。図13は、センサー・システムを有するプロテーゼが埋め込まれた、膝関節の側面図を表す。図14は、センサー・システムが埋め込まれた股関節プロテーゼの全面を表す。図15は、脊椎の二つの分節およびインプラント内に埋め込まれた、センサーの側面図を表す。図16は、椎体内のセンサー・システムを、プロテーゼ/インプラントの上位(軸方向)図で表す。
【0066】
本発明によるセンサー・システムは、関節病状の進行および異なる治療介入に続いて、手術前に使用されることが可能である。システムは手術中に、プロテーゼ/器具/金属器具の埋め込みを支援するために使用されることが可能である。脊柱では、手術中の血管変化、特に手術の是正と同様、神経要素が評価されることが可能である。そしてセンサーは、経時による変化および動力学変化を評価するために、術後に使用されることが可能である。センサーは手術中に作動され、パラメータ測定値は保存される。術後すぐセンサーは作動され、基線が分かる。
【0067】
センサーは、宿主骨および関連する組織の評価が可能であるが、しかしそれは、骨密度、液体粘度、温度、張力、圧力、角状変形、振動、血管/静脈/リンパ管の流れ、負荷、トルク、距離、傾き、形状、弾性、動き、などのみにとどまらない。なぜならば、センサーは関節腔にわたり、インプラント機能の変化を検出できるからである。インプラント機能のいくつかの例を挙げると、軸受磨耗、沈下、骨格統合、正常および異常な動作、心臓、粘度変化、粒状物質、運動学、などが含まれる。
【0068】
センサーは、内部電池または外部の手段によって、電力の投入が可能である。患者は、無線周波または電磁気/超音波エネルギーの使用が可能な、接触作動の必要がないシステムによって、夜間、ベッドで評価を受けられる。センサー・システムのエネルギー信号は、ベッドを通過し、センサーを作動し、ベッドに付着させることができる受信機に、伝送することができる。センサーは様々なパラメータを評価するため、“アップグレード”されて、長期使用が可能である(適正なソフトウェア強化など)。センサーは、フラッシュ・ドライブなどの外部装置によって、修正されることが可能である。例として、埋め込まれたセンサー一式は、器具を備えた脊椎融合部の進行を監視できる。パラメータが確認されると、同じセンサーが、近接する脊椎分節を監視し、ストレスの上昇および、最終的に近接したレベルの亜脱臼を予測するために、再プログラム化されることが可能である。
【0069】
本センサー・システムの他の特徴は、評価期間中、一連のセンサー・パラメータを交代できることである。例として、そのような交代は、患者の就寝中の骨密度の評価、そしてこれに続いて、血管接合部の滑液粘度、軸受面の評価が可能である。そのような評価は、必要に応じて特定の期間、または不規則に時間系列を定めることが可能になる。情報は現存する電話装置で、医療提供者に遠隔測定的に送られることが可能である。同様に、患者は外部センサー作動装置により、診療所にて評価されることが可能である。そして患者は、負荷、トルク、動作、安定性などのパラメータを含むインプラント機能を、医師が評価できるような、一連の動作を完了することができ得る。
【0070】
ソフトウェア・システムは、期間比較ができるマス目に、センサー情報を格納する。そして医師は、基準から外れた偏差が強調されたデータおよび機能を評価し、これらのパラメータはさらに評価される。
【0071】
これらのセンサー・システムは本文中で主に、膝関節、股関節、脊椎に対して検討されたが、システムは体内のいかなる骨格機能に適用されることが可能である。
【0072】
システムの使用は、筋骨格用センサー・システムとして、本発明の記述に説明されている。本発明は、限定されるものではないということが、注目されるものとする。本発明による装置および手法は、あらゆる必要用途に使用されることができる。
【0073】
前述の説明、および付随する図は、本発明の原則、好適な実施例、手術形態を例証する。しかし、本発明は、上記に検討された特殊な実施例に限定されて構成されるべきではない。上記の実施例の他の変化は、当業者によって理解され得る
【0074】
ゆえに、上記の実施例は、制限的なものではなく、実例的なものと見なされるべきである。したがって、付随の特許明細書に定められた本発明の範囲を逸脱することなく、実施例は当業者によって変化され得ることが、理解されるべきである。
【符号の説明】
【0075】
1.2.3.4.5.6.7.8.9.センサー
4.スクリュー
10.上部脊椎
20.下部脊椎
30.板
40.骨移植片
50.下関節窩
60.上関節窩
70.(脊椎)横突起
80.脊椎茎
110.下脊椎板
120.上脊椎板
130.ケージ器具、ペディクル・スクリュー
140.人工板リプレースメント
150.器具
151.ハンドル
152.プランジャ
153.トロカール
154.共役機構
160.骨折
170.ハンドル
180.超音波カニューレ・システム
181.カニューレ
182.送信機
183.受信機
184.配置センサー
190.ハンドル、分離受信機
191.プランジャ
200.ハンドル
210.ハンドル
【特許請求の範囲】
【請求項1】
生体パラメータを検出するための生体センサであって、
少なくとも1の生体トランシーバを有する少なくとも1の関節のプロテーゼを具えており、前記少なくとも1の生体トランシーバが、
前記トランシーバから処置領域に少なくとも1のエネルギー波を送信し、
前記少なくとも1のエネルギー波の挙動を定量的に評価し、
前記少なくとも1のエネルギー波を用いて粒状物質を評価するよう動作可能であることを特徴とする生体センサ。
【請求項2】
さらに、前記プロテーゼが、外部のソース(source)により分析して前記少なくとも1の関節の生体的状態を評価するために、前記粒状物質の評価に関するデータを前記外部のソースに送信するよう動作可能な送信機を具えることを特徴とする請求項1に記載の生体センサ。
【請求項3】
さらに、前記少なくとも1の関節に埋め込まれるような形状の1式の生体トランシーバを具えることを特徴とする請求項1に記載の生体センサ。
【請求項4】
前記少なくとも1の生体トランシーバが、内部に動力源を有することで、少なくとも1のエネルギー波を形成し、前記少なくとも1のエネルギー波の挙動を定量的に評価することを特徴とする請求項1に記載の生体センサ。
【請求項5】
前記エネルギー波が、電磁波、光、及び赤外線のうちの少なくとも1であることを特徴とする請求項4に記載の生体センサ。
【請求項6】
前記内部に動力源を有する生体トランシーバが、動力学的に作動する生体トランシーバを具えることを特徴とする請求項4に記載の生体センサ。
【請求項7】
前記少なくとも1の生体トランシーバが、少なくとも1の生体パラメータの現状を測定するよう動作可能であることを特徴とする請求項1に記載の生体センサ。
【請求項8】
前記少なくとも1の生体トランシーバが、少なくとも1の生体パラメータの現状を測定し、且つ、前記粒状物質を評価するよう動作し得ることを特徴とする請求項1に記載の生体センサ。
【請求項9】
生体パラメータを検出するための生体センサであって、
内部に動力源を有する少なくとも1の生体トランシーバを有する骨のプロテーゼを具えており、前記内部に動力源を有する少なくとも1の生体センサが、
内部で生成される動力を使用して、少なくとも1のエネルギー波を形成し、
前記トランシーバから前記骨及び前記骨に隣接する領域の少なくとも一方を含む処置領域に、前記少なくとも1のエネルギー波を向け、
前記トランシーバとともに前記少なくとも1のエネルギー波の挙動を定量的に評価し、
圧力、張力、せん断、相対位置、骨密度、液体粘度、温度、歪み、角状変形、振動、静脈の流れ、リンパ管の流れ、負荷、トルク、距離、傾き、形状、弾性、動き、軸受磨耗、沈下、骨格統合、粘度変化、粒状物質、運動学、安定性、及び血流から成る群から選択される、前記処置領域の少なくとも1の生体パラメータを測定する、
よう動作可能であることを特徴とする生体センサ。
【請求項10】
前記エネルギー波が、電磁波、光、及び赤外線のうちの少なくとも1であることを特徴とする請求項9に記載の生体センサ。
【請求項11】
前記内部に動力源を有する生体トランシーバが、動力学的に作動する生体トランシーバを具えることを特徴とする請求項9に記載の生体センサ。
【請求項1】
生体パラメータを検出するための生体センサであって、
少なくとも1の生体トランシーバを有する少なくとも1の関節のプロテーゼを具えており、前記少なくとも1の生体トランシーバが、
前記トランシーバから処置領域に少なくとも1のエネルギー波を送信し、
前記少なくとも1のエネルギー波の挙動を定量的に評価し、
前記少なくとも1のエネルギー波を用いて粒状物質を評価するよう動作可能であることを特徴とする生体センサ。
【請求項2】
さらに、前記プロテーゼが、外部のソース(source)により分析して前記少なくとも1の関節の生体的状態を評価するために、前記粒状物質の評価に関するデータを前記外部のソースに送信するよう動作可能な送信機を具えることを特徴とする請求項1に記載の生体センサ。
【請求項3】
さらに、前記少なくとも1の関節に埋め込まれるような形状の1式の生体トランシーバを具えることを特徴とする請求項1に記載の生体センサ。
【請求項4】
前記少なくとも1の生体トランシーバが、内部に動力源を有することで、少なくとも1のエネルギー波を形成し、前記少なくとも1のエネルギー波の挙動を定量的に評価することを特徴とする請求項1に記載の生体センサ。
【請求項5】
前記エネルギー波が、電磁波、光、及び赤外線のうちの少なくとも1であることを特徴とする請求項4に記載の生体センサ。
【請求項6】
前記内部に動力源を有する生体トランシーバが、動力学的に作動する生体トランシーバを具えることを特徴とする請求項4に記載の生体センサ。
【請求項7】
前記少なくとも1の生体トランシーバが、少なくとも1の生体パラメータの現状を測定するよう動作可能であることを特徴とする請求項1に記載の生体センサ。
【請求項8】
前記少なくとも1の生体トランシーバが、少なくとも1の生体パラメータの現状を測定し、且つ、前記粒状物質を評価するよう動作し得ることを特徴とする請求項1に記載の生体センサ。
【請求項9】
生体パラメータを検出するための生体センサであって、
内部に動力源を有する少なくとも1の生体トランシーバを有する骨のプロテーゼを具えており、前記内部に動力源を有する少なくとも1の生体センサが、
内部で生成される動力を使用して、少なくとも1のエネルギー波を形成し、
前記トランシーバから前記骨及び前記骨に隣接する領域の少なくとも一方を含む処置領域に、前記少なくとも1のエネルギー波を向け、
前記トランシーバとともに前記少なくとも1のエネルギー波の挙動を定量的に評価し、
圧力、張力、せん断、相対位置、骨密度、液体粘度、温度、歪み、角状変形、振動、静脈の流れ、リンパ管の流れ、負荷、トルク、距離、傾き、形状、弾性、動き、軸受磨耗、沈下、骨格統合、粘度変化、粒状物質、運動学、安定性、及び血流から成る群から選択される、前記処置領域の少なくとも1の生体パラメータを測定する、
よう動作可能であることを特徴とする生体センサ。
【請求項10】
前記エネルギー波が、電磁波、光、及び赤外線のうちの少なくとも1であることを特徴とする請求項9に記載の生体センサ。
【請求項11】
前記内部に動力源を有する生体トランシーバが、動力学的に作動する生体トランシーバを具えることを特徴とする請求項9に記載の生体センサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】

【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【公開番号】特開2013−56173(P2013−56173A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2012−237156(P2012−237156)
【出願日】平成24年10月26日(2012.10.26)
【分割の表示】特願2008−504250(P2008−504250)の分割
【原出願日】平成18年3月29日(2006.3.29)
【出願人】(507291682)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成24年10月26日(2012.10.26)
【分割の表示】特願2008−504250(P2008−504250)の分割
【原出願日】平成18年3月29日(2006.3.29)
【出願人】(507291682)
【Fターム(参考)】
[ Back to top ]