
身体内のマーカあるいは組織構造を位置決めする装置、システム及び方法
例えば胸部内など、患者の身体内の病変を位置決めする装置、システム、及び方法が提供されている。このシステムは、ターゲット組織領域内又は周辺にインプラント可能な一又はそれ以上のマーカと、電磁信号を送受信して一又はそれ以上のマーカを検出するプローブを具える。使用中は、マーカがターゲット組織領域内にあり、プローブを患者の皮膚に対して配置して、マーカを検出し、位置決めする。病変及びマーカを具える組織検体を、プローブからの位置決め情報に少なくとも部分的に基づいてターゲット組織領域から除去する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般的に、外科的処置を行う装置及び方法に関し、特に、患者の身体内のターゲット、マーカ、病変、及び/又はその他の身体構造を、例えば、腫瘍摘出手術などの外科的処置あるいはその他の処置を行う間に、位置決めする装置及び方法に関する。
【背景技術】
【0002】
生体検査、又は腫瘍摘出手術などの胸部内の病変を除去する外科的処置を行う前に、その病変の位置を特定しなければならない。例えば、処置を行う前に病変の位置を位置決め及び/又は確認するにはマンモグラフィや超音波撮像を用いることができる。その結果得られた画像は、外科医が病変の位置を特定し、例えば、その病変にアクセスするための切開を行う間及び/又はその病変を除去するのに、外科医を案内する処置を行う間に、外科医によって使用される。しかし、このような画像は、通常二次元画像であり、その胸部と除去すべき病変は三次元構造体であるため、病変を位置決めするのに限られたガイダンスを提供するのみである。更に、このような画像は、病変周囲に適切なマージンを決めるにあたって、すなわち、除去すべき所望の標本体積を決定するに際して、限られたガイダンスを提供するのみである。
【0003】
位置決めを容易にするためには、処置の直前に、例えば針を用いて胸部にワイヤを挿入し、ワイヤの先端が病変位置に来るようにすることができる。ワイヤが配置されると、例えば、胸部からワイヤが出てくる患者の皮膚に絆創膏やテープを貼って、ワイヤを適所に固定することができる。適所に配置して固定したワイヤを用いて、患者は、例えば、生体検査や腫瘍摘出手術を行うための外科的処置を行うことができる。
【0004】
位置決めにワイヤを用いることの一つの問題は、配置した時と外科的処置を行う間にワイヤが移動することがある点である。例えば、ワイヤが十分に固定されていないと、病変にアクセスするのに用いた経路に対してワイヤが動いてしまい、その結果、先端が病変の位置を間違って表示することがある。この問題が生じると、その位置にアクセスして、組織を取り除くときに、病変が完全に除去されないことがあり、及び/又は、健康な組織が不必要に除去されてしまうことがある。更に、この手順の間に、外科医は、例えばマンモグラフィやワイヤを配置する間に取得したその他の画像に基づいてワイヤの先端と病変の位置を推測するのみであり、それ以上のガイダンスなしで切除を行うことになる。更に、このような画像は二次元画像であるので、処置を行うあるいは除去する病変を特定するのに限られたガイダンスを提供することになる。
【0005】
代替的に、放射性シードを配置して、処置を行う間に位置決めを行うことが提言されている。例えば、胸部を通って病変へ針を導入して、針からシードを展開させることができる。この針は引き抜いて、シードの位置をマンモグラフィを用いて確認することができる。一連の外科的処置を行う間に、携帯型ガンマプローブを胸部の上に配置して、シード上の位置を認識し、切開を行って、プローブを用いてシードと病変の切除を案内することができる。
【0006】
シードは、すぐに除去される針を通って送達されるので、配置と外科的処置を行う間にシードが患者の身体内で移動するというリスクがある。従って、位置決めワイヤを使用する場合と同様に、シードが正確に病変の位置を認識しないことがあり、特に、一旦配置したシードを外から安定させる方法はない。更に、このようなガンマプローブは、シードの位置を決めるに際して、例えば三次元で所望の正確さを提供することができず、従って、病変の特定に限られたガイダンスを提供できるのみである。
【0007】
従って、外科的処置、診断、あるいはその他の医療処置を行う前、及び/又はその間に、病変又はその他の組織構造の位置決めを行う装置及び方法が有益である。
【発明の概要】
【0008】
本発明は、外科的処置あるいはその他の医療処置を行う装置及び方法に関する。特に、本発明は、インプラント可能なマーカ、及び患者の身体内のターゲット、マーカ、病変、及び/又はその他の身体構造を、例えば、腫瘍摘出手術などの外科的処置あるいはその他の処置を行う前又は間に、位置決めする装置及び方法に関する。
【0009】
一実施例によれば、一又はそれ以上のマーカ又はターゲットを含む患者の身体内のターゲット組織領域を位置決めするシステムと;ターゲット組織領域にターゲットが導入され、ターゲット組織領域近傍及び/又はターゲット組織領域に向けてプローブを配置した後に、ターゲットを検出する電磁信号を送受信するプローブが提供されている。プローブは、例えば、ディスプレイ、スピーカ、などの一又はそれ以上の出力デバイスを具えており、例えば、プローブとターゲット間の距離及び/又は角度方向といった、プローブに対するターゲットの空間的感覚に基づいた空間的情報を提供する。選択的に、このシステムは、例えば、中に一又はそれ以上のターゲットを装填することができる、針、カニューレ、又はその他の筒状部材など、ターゲットを組織、あるいは患者の身体内へ導入する一又はそれ以上の送達デバイスを具えていても良い。
【0010】
例示的な実施例では、ターゲットは、複数の傾斜面を具えていても良く、これがプローブからの電磁信号の反射を強化することができる。例えば、ターゲットが受動マーカを提供するといったことである。例えば、ターゲットは、コアエレメントに連結された複数のビーズを具える細長いマーカであっても良く、このビーズが傾斜面及び/又はエッジを具えており、プローブによる検出を強化している。コアエレメントは、例えば、波形、テーパーの付いたらせん、筒状らせん、などの一又はそれ以上のあらかじめ決められた形状に基づいていてもよく、更に、例えば、マーカの送達デバイスへの装填を容易にするために、真っ直ぐなるのに十分に弾性があるものでも良い。別の実施例では、ターゲットは、球形、楕円形、ディスク状、又はその他の形状をしていても良く、例えば、電磁信号の反射を強化する一又はそれ以上の表面特性を持っていても良い。
【0011】
選択的に、ターゲットは、プローブからの入射信号を変調してターゲットの位置決めを容易にする一又はそれ以上の回路、機構、などを具えていても良い。例えば、ターゲットが能動反射マーカを提供するなどである。例えば、ターゲットは、ターゲットに当たるプローブからの信号に位相シフトを与え、例えば、そのターゲットを、その他のターゲット、組織構造などから区別する。別の選択では、ターゲットは、回路と電源を具えており、ターゲットがプローブからの信号の検出に応答して、所定の信号を生成するようにする、すなわち、能動応答マーカを提供する。
【0012】
選択的に、ターゲットは、細長いフレキシブルテザーに開放可能にあるいはほぼ永久的に連結されたマーカを具えていても良い。代替的に、ターゲットは、シャフトと、当該シャフトの遠位端にマーカを具える位置決めワイヤを具えていても良い。
【0013】
別の実施例によれば、患者の身体内のターゲット組織領域を位置決めするシステムが提供されており、このシステムは、ターゲット組織領域内あるいはこの周変にインプラントするサイズの一又はそれ以上のマーカ又はターゲットを担持する送達デバイスと;プローブがターゲット組織領域近傍及び/又はターゲット組織領域に向けて配置された際に、ターゲット組織領域内あるいはその周辺にインプラントした一又はそれ以上のマーカを検出する電磁信号を送受信するプローブと;を具える。
【0014】
例示的実施例では、この送達デバイスは、近位端と、患者の身体内の組織を通ってターゲット組織領域へ導入するサイズの遠位端を具えるシャフトと、この遠位端から送達可能な一又はそれ以上のマーカとを具える。例えば、シャフトは、ルーメンを具えており、複数のマーカは、このルーメン内を搬送されて、マーカがシャフトから順次送達され、病変あるいはその他のターゲット組織領域内あるいはその周辺の位置にインプラントされる。この送達デバイスで送達することができる例示的なマーカには、受動マーカ、能動反射マーカ、及び能動応答マーカが含まれる。
【0015】
更に別の実施例によれば、患者の身体内のターゲット組織領域を位置決めする方法が提供されており、この方法は、マーカ又はその他のターゲットを組織を通ってターゲット組織領域へ導入するステップと;プローブを、患者の皮膚又はターゲット組織領域近傍に対して及び/又はターゲット組織領域に向けて配置するステップと;プローブを作動させて、プローブがターゲット組織領域に向けて電磁信号を送信し、ターゲットから反射された電子信号を受信し、ターゲットとプローブとの間の空間的関係を提供する空間情報を、表示、送出、又は提供するステップと;を具える。
【0016】
一実施例では、ターゲットは組織を通ってターゲット組織領域へ導入された位置決めワイヤであっても良く、この位置決めワイヤがターゲットを搬送する。別の実施例では、ターゲットはターゲット組織領域内にインプラントされた一又はそれ以上のマーカであっても良い。更に別の実施例では、ターゲットはカテーテル又は、例えば、ターゲット領域に導入することができ、展開して体積又はその領域を描出することができるその他のデバイスであっても良い。このデバイスは、例えば電磁波プローブを用いて、その体積を認識及び/又は規定するように構成された特別な構造を具えていても良い。選択的に、このターゲットは、診断、治療、及び/又は外科的処置を行う前、又は行っている間に、例えば、定位性、超音波、又は電磁波ベースの撮像装置を用いて、配置しても良い。
【0017】
例示的な実施例では、ターゲット組織領域は、病変を有する患者の胸部内の領域を具えていても良く、ターゲットが当該病変内又は周囲に送達される。代替的に、ターゲット組織領域は、例えば、腸、卵管などの中又は周辺といった身体のその他の領域に位置するものでも良い。例えば、ターゲットは、病変から離れたところにあるターゲット組織領域に導入して、ターゲット組織領域から検体体積除去用の所望のマージンを規定する第1のマーカを具えていても良い。選択的に、第2のマーカ及び/又は複数の追加のマーカを病変と第1のマーカから離れたところにあるターゲット組織領域に導入して、更に所望のマージンを規定するようにしても良い。このように、所望であれば、三次元アレイマーカを、ターゲット組織領域内あるいはその周囲に配置して、その位置決めを容易にすることもできる。組織検体は、次いでターゲット組織領域から除去することができる。この検体は、病変とターゲットを含む。
【0018】
更に別の実施例によれば、患者の胸部のターゲット組織領域内の病変を除去する方法が提供されており、この方法は、胸部組織を通ってターゲット組織領域へターゲットを導入するステップと;例えば、通常ターゲット組織領域に向けて、患者の皮膚近傍に、ターゲット組織領域に向けて電磁信号を送信し、ターゲットから反射された電磁信号を受信し、ターゲットとプローブ間の空間的関係を提供する空間情報を提供するプローブを配置するステップと;ターゲット組織領域から、病変とターゲットを含む組織検体を除去するステップと;を具える。
【0019】
更に別の実施例によれば、患者の胸部のターゲット組織領域内の病変を除去する方法が提供されており、この方法は、胸部組織を通ってターゲット組織領域へターゲットを導入するステップと;例えば、ターゲット組織領域に向けて、患者の皮膚近傍に、ターゲット組織領域に向けて電磁信号を送信し、ターゲットから反射された電磁信号を受信するプローブを配置するステップと;このプローブを用いて、病変周囲のターゲット組織領域内に所望のマージンを規定するステップと;所望のマージンによって規定され、病変とターゲットを含む組織検体をターゲット組織領域から除去するステップと;を具える。
【0020】
更に別の実施例によれば、患者の身体内のターゲット組織領域を位置決めするインプラント可能なマーカが提供されており、このマーカは細長いコア部材と、このコア部材に担持される複数のビーズを具える。選択的に、このビーズは、複数の表面及び/又はエッジを具えており、電磁信号の反射を強化してマーカの位置決めを容易にする。これに加えて、あるいは代替的に、マーカは、例えばビーズの一つに又はコア部材に埋め込まれたあるいはこれに担持された電子回路を具えていても良く、これによって能動反射と能動応答の一つを提供することができる。
【0021】
本発明のその他の態様及び特徴は、図面を参照して、以下の記載を考慮することで明らかになる。
【図面の簡単な説明】
【0022】
【図1】図1は、位置決めワイヤとプローブを有する、身体内のターゲット組織領域を位置決めするシステムの一実施例を示す正面図である。
【図2】図2Aは、患者の身体胴体部の正面図であり、例えば腫瘍又はその他の病変など、胸部内のターゲット組織領域に挿入されている図1に示す位置決めワイヤを示す。図2Bは、図2Aの2B−2B線に沿った胸部の断面図であり、ターゲット組織領域内に配置した位置決めワイヤ上のターゲットを示す。
【図3】図3は、図2A及び2Bに示す胸部の断面図であり、例えば、皮膚から病変までの距離、所望のマージン、及び/又は、胸部から除去する検体のサイズを測る、切開部位置決めワイヤのターゲットまでの第1の距離の測定に使用されている、図1のプローブを示す。
【図4】図4は、最初の切除が行われた後の図2A、2B、及び3に示す胸部の断面図であり、例えば、除去する検体の所望するマージンに十分に届くように組織が切除されたかどうかを決定するために、第2の距離測定を行うのに使用されているプローブを示す。
【図5】図5は、図2A及び2Bの胸部から取った切除組織検体の断面図であり、例えば、病変の周りに所望のマージンが達成されていることを確認するために、第3の距離測定を行うのに使用しているプローブを示す。
【図6】図6は、胸部の斜視図であり、胸部内の、例えば触知できない病変など、一又はそれ以上の病変周囲に複数のマーカを送達するのに使用されている送達デバイスを示す。
【図7】図7は、図6に示す胸部の断面図であり、病変周囲に配置した複数のマーカを示す。
【図8】図8は、図6及び7に示した胸部の断面図であり、例えば、一又はそれ以上のマーカへの距離を測るために、第1の距離測定セットを取り入れて使用されているプローブを示す。
【図9】図9は、図6乃至8に示した胸部の断面図であり、例えば、当該胸部から除去すべき検体周囲の所望のマージンを規定するために、マーカに至るまでの切開を容易にするべく使用されているプローブを示す。
【図10】図10は、マーカ位置決め用の様々なシステムに含めることができるプローブの例示的実施例を示す概略図である。図10Aは、図10に示すプローブ機器のような、プローブ上に設けることができる例示的なディスプレイ出力を示す図である。図10Bは、図10に示すプローブ中に設けることができるアンテナの断面図である。
【図11】図11は、身体内のターゲット組織領域を特定するシステムの別の例示的実施例を示す図であり、このシステムは、胸部にインプラントしたマーカ、当該マーカを位置決めするハンドヘルドのプローブと当該プローブに接続されているコントローラを有するプローブ機器を具える。
【図12】図12は、病変を含む胸部からの組織検体の除去を容易にする、マーカの位置決めに使用されている図11に示すシステムの側面図である。
【図13】図13は、病変を含む胸部からの組織検体の除去を容易にする、マーカの位置決めに使用されている図11に示すシステムの側面図である。
【図14】図14は、病変を含む胸部からの組織検体の除去を容易にする、マーカの位置決めに使用されている図11に示すシステムの側面図である。図14Aは、図14の詳細を示す図であり、マーカを位置決めするのに使用されているプローブを示し、これによって胸部から除去している組織検体の所望のマージンを特定する。
【図15】図15は、病変を含む胸部からの組織検体の除去を容易にする、マーカの位置決めに使用されている図11に示すシステムの側面図である。図15Aは、図15の詳細を示す図であり、マーカを位置決めするのに使用されているプローブを示し、これによって除去した組織検体の所望のマージンが達成されたことを確認する。
【図16】図16Aは、プローブと一体になった指サックと、プローブに接続されたコントローラを含むプローブ機器の別の例示的実施例を示す斜視図である。図16Bは、図16Aに示す指サックの詳細を示す側面図であり、指がその中に入っている状態を示す。
【図17】図17は、病変近傍にインプラントされており、胸部組織を切除して病変を含む組織検体を除去する間に、図16A及び16Bに示すプローブ機器を用いて特定されたマーカを示す、胸部の断面図である。
【図18】図18は、病変近傍にインプラントされており、胸部組織を切除して病変を含む組織検体を除去する間に、図16A及び16Bに示すプローブ機器を用いて特定されたマーカを示す、胸部の断面図である。
【図19】図19は、プローブを担持するカニューレと当該プローブに接続されたコントローラを具えるプローブ機器の更に別の例示的実施例を示す側面図である。図19Aは、中にプローブを有する図19に示すカニューレの先のとがった先端部の詳細を示す図である。
【図20】図20は、病変の近傍にインプラントされたマーカを有する胸部の断面図であり、胸部にカニューレを配置して病変部位にアクセスを提供する方法を示す。
【図21】図21は、病変の近傍にインプラントされたマーカを有する胸部の断面図であり、胸部にカニューレを配置して病変部位にアクセスを提供する方法を示す。
【図22】図22は、病変の近傍にインプラントされたマーカを有する胸部の断面図であり、胸部にカニューレを配置して病変部位にアクセスを提供する方法を示す。
【図23】図23Aは、組織にインプラントして、プローブを用いて特定できる細長いマーカの第1の例示的実施例の側面図である。図23Bは、図23Aのマーカの23B−23Bラインに沿った断面図である。図23Cは、図23Aのマーカの端面図である。図23Dは、展開した形状において波形を有する、図23A乃至23Cのマーカを示す側面図である。
【図24】図24A乃至24Cは、図23A乃至23Dのマーカなど、インプラント可能なマーカの製作に使用できるビーズの、それぞれ、斜視図、端面図及び側面図である。
【図25】図25Aは、組織内にインプラントしてプローブを用いて特定できる細長いマーカの代替実施例を示す側面図である。図25Bは、図24Aのマーカの詳細を示す図であり、マーカの表面に組み入れた特徴部分を示す。
【図26】図26A乃至26Cは、組織内にインプラントしてプローブを用いて特定できるらせん形状を有する細長いマーカの別の代替実施例を示す、それぞれ、側面図、斜視図及び端面図である。
【図27】図27A乃至27Cは、組織内にインプラントしてプローブを用いて特定できる球形マーカの例示的実施例を示す、それぞれ、斜視図、端面図及び側面図である。
【図28】図28A乃至28Cは、組織内にインプラントしてプローブを用いて特定できる球形マーカの代替実施例を示す斜視図である。
【図29】図29A及び29Bは、図25のマーカを胸部に送達するのに使用される送達カニューレの例示的実施例を示す側面図である。
【図30】図30Aは、マーカを送達する送達カニューレの別の例示的実施例を示す側面図である。図30Bは、図30Aの送達カニューレの30B−30B線に沿った断面図である。
【図31】図31Aは、マーカを送達した後の図30A及び30Bの送達カニューレの側面図である。図31Bは、図31Aの送達カニューレの31B−31B線に沿った断面図である。
【図32】図32は、胸部の断面図であり、図30A乃至31Bの送達カニューレを用いて胸部に図25のマーカをインプラントする方法を示す。図32Aは、図32に示す胸部にインプラントされているマーカの詳細を示す図である。
【図33】図33は、胸部の断面図であり、図30A乃至31Bの送達カニューレを用いて胸部に図25のマーカをインプラントする方法を示す。図33Aは、図33に示す胸部にインプラントされているマーカの詳細を示す図である。
【図34】図34A及び34Bは、組織内のインプラント用マーカの更に別の実施例を示す、それぞれ、側面図及び端面図である。
【図35】図35は、細長いテザーに連結された図34A及び34Bに示すマーカを具えるマーカ装置の代替実施例の側面図である。
【図36】図36は、図35のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
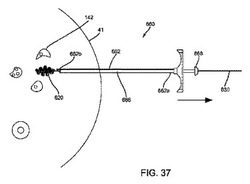
【図37】図37は、図35のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図38】図38は、図35のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図39】図39は、図35のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図40】図40は、図35のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図41】図41A及び41Bは、組織内へのインプラント用マーカの更なる別の例示的実施例を示す、側面図と端面図である。
【図42】図42は、細長いテザーに連結した図36A及び36Bのマーカを具えるマーカ装置の代替実施例を示す側面図である。
【図43】図43は、図42のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図44】図44は、図42のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図45】図45は、図42のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図46】図46は、図42のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図47】図47は、患者の消化管システムに導入されているマーカを示す患者の身体の断面図である。
【図48】図48は、図47に示す患者の身体に導入できるマーカの詳細を示す図である。
【図49】図49は、図47の患者の身体の詳細を示す図であり、ある手順を実行するために、少なくとも部分的に患者の消化管システムへ導入したマーカの位置に基づいて、患者の身体内に導入されている機器を示す。
【図50】図50Aは、マーカに入射しマーカから反射してきたプローブからの信号を示す概略図であり、図50Bは、入射信号と反射信号の間の位相シフトを示す図である。
【発明を実施するための形態】
【0023】
図1は、胸部、あるいは身体内のその他の位置にある、腫瘍、病変、あるいはその他の組織構造といった患者の身体内のターゲット組織領域を位置決めするシステム10の一実施例を示す。システム10は、一般的に、マーカ装置又は位置決めワイヤ20と、電磁パルス、電磁波、あるいはレーダーなどのその他の信号を用いて位置決めワイヤ20の少なくとも一部を検出するプローブ30を具える。位置決めワイヤ20は、近位端22aと、遠位端22bと、遠位端22bの上のターゲット26を具える細長部材又はシャフト22を具える。選択的に、システム10は、位置決めワイヤ20に加えて一又はそれ以上の追加の位置決めワイヤ及び/又はターゲット(図示せず)を具えていても良い。
【0024】
シャフト22は、硬質ロッド、中空筒状ボディなど、位置決めワイヤ20を組織を通して経皮的に容易に導入できる十分なコラム強度を有する比較的硬い材料で形成することができる。シャフト22は、例えば、約0.5乃至10cmといった、患者の身体の外側位置から組織を通ってターゲット組織領域へ延在するのに十分な長さを有する。選択的に、シャフト22は所望の場合に曲げることができる、あるいは所望の形状に形成することができるように、適応性があるあるいは塑性的に変形可能であっても良い。
【0025】
ターゲット26は、シャフト22の遠位端22bに、プローブ30を用いて遠位端22bの位置決めを容易にする一又はそれ以上の特徴を具えていても良い。図に示す例示的な実施例では、ターゲット26は、例えば約0.5乃至5mmであり、例えばシャフト22の遠位端22bより直径が大きい球形といった、球状構造であっても良い。選択的に、ターゲット26は、電磁気信号の受信及び反射を強化する一又はそれ以上の特徴を具えていても良い。例えば、ターゲット26は、一又はそれ以上の材料から形成することができ、及び/又は、例えば、本明細書に記載したマーカと同様に、レーダー検出を強化する表面仕上げを有していても良い。代替の実施例では、例えば、立方体、三角形、らせん、などの、その他の形状及び/又はジオメトリが提供されており、これらは、本明細書に記載したその他の実施例と同様に、レーダーの反射及び/又は検出を強化することができる一又はそれ以上のコーナー及び/又はエッジを具える。
【0026】
これに加えて、あるいは代替的に、ターゲット26は、例えば、病変部42の周りに所望のマージンを容易に位置決めするために、病変部42のサイズ及び/又は形状に近いサイズ及び/又は形状を有していても良い。例えば、病変部42のサイズ及び/又は形状は事前に測定することができ、ターゲット26は、サイズ及び形状が異なるターゲットセットから選択して、シャフト22に固定することができる(又は、各ターゲットにそれぞれシャフトを設けるようにしても良い)。これに加えて、あるいは代替的に、複数の位置決めワイヤ及び/又はターゲットが提供されている場合は、例えば、プローブ30を用いてターゲットを互いに容易に区別するように、各ターゲットの形状及び/又は特徴は異なっていても良い。
【0027】
一実施例では、シャフト22とターゲット26を、同じ材料で一体的に形成することができる。代替的に、ターゲット26は、シャフト22と異なる材料で形成するようにしても良く、ターゲット26は、接着剤による接着、溶接、半田付け、締り嵌め、ねじ、あるいはその他の協動するコネクタ、などによって遠位端22bに固定しても良い。このように、この代替例では、ターゲット26を、シャフト22に対するレーダーによる検出を強化する材料で形成することができる。
【0028】
選択的に、複数のターゲットをインプラントする場合は、各ターゲットが、一又はそれ以上のその他のターゲットに対して特定のターゲットを区別することができる、表面、形状、及び/又は追加の材料の特徴を有していても良い。例えば、各ターゲットは、そのターゲットに特異的な特定の電磁信号を吸収するあるいは反射するものであっても良く、当該ターゲットを独自に特定するのに使用することができる。
【0029】
別の選択肢では、位置決めワイヤ20が一又はそれ以上のアンカ要素24を、例えばターゲット26近傍など、遠位端22b上に具えていても良いが、ターゲット26自体はアンカ要素24が不必要なほど十分に位置決めワイヤ20を安定化させることができる。図に示すように、アンカ要素24は、シャフト22から、例えば、ターゲット26から近位側に離れる方向に角度をつけるなど、逆方向に延在する複数のとげ24(2つ図示)を具えている。このように、とげ24は、位置決めワイヤ20が組織内に挿入された後に位置決めワイヤ20を適所に固定するように構成して、例えば位置決めワイヤ20を組織を通って遠位側に進める一方で、続いて生じる近位側へ引っ張られることを防止することができる。例えば、とげ24は十分にフレキシブルであり、とげ24がシャフト22に対してあるいはシャフト22近傍に圧縮されて、例えば、位置決めワイヤ20のプロファイルを最小にして、容易に前進させ、さらに、図に示すように横方向に外側に戻るように弾性的にバイアスすることができる。
【0030】
プローブ30は、例えば、マイクロパワーインパルスレーダー(MIR)プローブなど、電磁信号送受信能力を有するポータブル装置であっても良い。例えば、図1に示すように、プローブ30は、例えば患者の皮膚又は皮下組織など、組織に対してあるいは組織近傍に配置するよう意図した第1の端部30aと、例えばユーザが保持できる第2の反対側端部30bを有するハンドヘルド装置であっても良い。図10を更に参照すると、プローブ30は、一般的に、例えば送信アンテナ32と受信アンテナ34などの一又はそれ以上のアンテナと、一又はそれ以上のプロセッサ又はコントローラ36、及びディスプレイ38を具える。
【0031】
図10を参照すると、プロセッサ36は、一又はそれ以上のコントローラ、回路、信号生成器、ゲート、送信アンテナ32によって送信する信号の生成及び/又は受信アンテナ34によって受信した信号を処理するのに必要なその他のもの(図示せず)を具えていても良い。プロセッサ36の構成要素は、所望の、個別部品、固体素子、プログラム可能なデバイス、ソフトウエア構成要素、その他を具えていても良い。例えば、図に示すように、プローブ30は、例えばパルス発生器及び/又は疑似ノイズ発生器(図示せず)などの、送信アンテナ32に接続して送信信号を発生するインパルス発生器36bと、受信アンテナ34によって検出した信号を受信するインパルス受信器36cを具えていても良い。プロセッサ36は、マイクロコントローラ36aと、インパルス発生器36bとインパルス受信器36cを交互に作動させて電磁パルス、電磁波、あるいはその他の信号をアンテナ32を介して送信し、アンテナ34を介して反射された電磁信号を受信するレンジゲートコントロール36dを具えていても良い。使用することができる例示的な信号には、マイクロ波、例えば、超低帯域幅領域にあるマイクロインパルスレーダ信号などの無線波がある。
【0032】
例示的な実施例では、各アンテナ32、34は、例えば、角が付き出した物理的プロファイルを有するUWBアンテナ、ダイポールとパッチアンテナ、あるいはダイヤモンドダイポールアンテナなどの、共平面アンテナ、シングルエンド楕円アンテナ(SEA)、パッチアンテナ、その他であっても良い。代替的に、プロセッサ36は、個別のアンテナ32、34を提供する代わりに、単一のアンテナを送信アンテナと受信アンテナ(図示せず)として交互に作動させても良い。
【0033】
例えば、各アンテナ32、34は、Progress in Electromagnetics Research B,Vol.13,59−74(2009)で刊行された、“TEM Horn Antenna for Ultra−Wide Band Microwave Breast Imaging”に開示されているような、TEMホーンアンテナであっても良い。代替的に、各アンテナ32、34は、2008年3月20日公開の、米国特許公開公報第2008/0071169号に開示されたもの、及び、Microwaves,Antennas,& Propagation,IET,Volume 1,Issue 2(April 2007),pp.277−281で刊行されたNilavalanらの“Wideband Microstrip Patch Antenna Design for Breast Cancer Tumour Detection”にあるようなパッチアンテナであっても良い。パッチアンテナは、誘電材料が詰まったエンクロージャ(図示せず)に接続して、マイクロインパルスレーダーでの使用を容易にすることができる。
【0034】
別の代替実施例では、各アンテナが、例えば図10Bに示すような導波管ホーンであっても良い。図に示すように、アンテナ32’は、第1の端部32Bが閉じており、第2の端部32Cが開放しており、内部に導波管32Dが装着されているケース32Aを具える。ケース32Aの壁は、例えば、ベルギーのWesterlo所在の、Emerson & Cuming Microwave Products,N.V.社が販売しているEccosorb−FGM40などのブロードバンドシリコーン吸収材などの吸収材32Eで内張りしたものでも良い。ケース32Aの容積は、例えば、比誘電率が10の誘電体32Fで満たされていても良い。例示的実施例では、アンテナ32’は、例えば、幅約15×15mm、第1及び第2の端部32B−32C間の長さ約30mmの、約3乃至10ギガヘルツ(3−10Ghz)の超広域周波数帯(UWB)で動作するように構成された、正方形導波管ホーンであっても良い。開放端32Bは、内部にアンテナ32’が装着されているプローブから外側に向けられており、例えば開放端32Bが、アンテナ32’が本明細書に記載したような信号を送信及び/又は受信するように意図されている組織に接触又は連結されていても良い。
【0035】
インパルス受信器36cからの信号は、マイクロコントローラ36a用いて通信して更なる処理、表示、保存、通信、その他を行う前に、フィルタにかけるか、あるいは、例えば、リターン信号簡潔化(de−clutter)及び成形回路36eによって処理を行うようにしても良い。回路36eは、例えば、リターンエコーノイズや反射波などのアンテナ34からの信号を受信したり、その信号を例えばLPFを用いて簡潔化したりしてもよく、及び/又は、所望の通り、デジタル適応フィルタリング及び/又はパルス成形器を含むものでも良い。マイクロコントローラ36aは、次いで、以下に更に述べるように、受信した及び/又は処理した信号を読み取って、例えば、距離、角度、方向、などターゲット26の空間関係、あるいはプローブ30に対するその他の構造を認識することができる。プローブ30に含まれるプロセッサ及び/又はその他の構成要素の例示的実施例は、McEwanに付与された米国特許第5,573,012号と、第5,766,208号に開示されている。
【0036】
代替の実施例では、プローブ30は、McEwanに付与された米国特許第6,914,552号に開示されているような磁気レーダーシステムとして作動するように構成することができる。例えば、プローブ30は、発電機及び/又は電流コイルドライバ(図示せず)に接続された、例えば電磁石(図示せず)のような磁場励振源を具えていても良い。発電機及び/又は電流コイルドライバは、プローブ30内又は外部に設けることができる。例えば、このプローブは、マーカ又はその他のターゲットに磁場を誘発し、両極間にレーダーユニットが同定及び/又は認識できる特定周波数で振動を生じさせて、距離の測定あるいは位置座標を提供する。このようなプローブは、ターゲットに届いたレーダーパルスあるいは、レーダーアンテナに届いた反射信号を減衰させる、比較的インピーダンス又は誘電率が高い、組織、骨、あるいは体液内にターゲットが、インプラントされている場合に有益である。
【0037】
図10を参照すると、プローブのディスプレイ38がマイクロコントローラ36aに接続されて、プローブ30のユーザに、アンテナ32、34を介して得た、例えば空間又はイメージデータといった情報を表示する。例えば、以下に更に説明するように、ディスプレイ38は、単純に、距離、角度、方向、及び/又は、例えば、ターゲット26のプローブ30に対する相対位置など、所定の基準に基づくその他のデータを提供する読み出しであっても良い。図10Aは、提供され得るディスプレイ38の出力の例示的実施例を示す図であり、このディスプレイは、矢印又はその他の表示38aのアレイと、距離読み出し38bを具えていても良い。例えば、マイクロコントローラ36aは、受信した信号を分析して、プローブ30に対してどの方向にマーカ(図示せず)を配置し、適宜の矢印38aを作動させるかを決め、マーカへの距離(例えば、「3cm」が示されている)を表示する。このように、ユーザは、どの方向にマーカが配置されており、その方向においてどれだけ遠いかを認識することができ、これによって、ユーザにマーカとマーカがインプラントされているターゲット組織領域へのガイダンスを提供する。
【0038】
これに加えて、あるいは代替的に、ディスプレイ38は、例えばプローブ30が向かっている領域のリアルタイムでの画像など、すなわち、プローブ30の第1の端部30a、動作パラメータ、その他を超えて、その他の情報を提供することができる。選択的に、プローブ30は、ディスプレイ38に加えて、あるいは代替的に、一又はそれ以上のその他の出力デバイスを具えていても良い。例えば、プローブ30は、音響出力、視覚的出力を提供する一又はそれ以上のLED又はその他の光源など一又はそれ以上のスピーカ(図示せず)を具えており、例えば、空間情報、動作パラメータ、などの情報を提供するようにしても良い。例えば、スピーカ又はLEDは、プローブ30が、例えば所望のマージンといった、マーカから所定のしきい値距離に達した時、作動するか、あるいは、逐次距離が近くなったときに作動するようにしても良い。
【0039】
選択的に、プローブ30は、一又はそれ以上のユーザインターフェース、メモリ、送信器、受信器、コネクタ、ケーブル、電源、その他(図示せず)といった、その他の構成あるいは構成要素を具えていても良い。例えば、プローブ30は、プローブ30の構成要素を動作させる、一又はそれ以上の電池あるいはその他の内部電源を具えていても良い。代替的に、プローブ30は、例えば標準AC電源など、外部電源に接続することができるケーブル(図示せず)を具え、プローブ30の構成要素を動作させるようにしても良い。
【0040】
図10を参照すると、ユーザコントロール37は、キーパッド、タッチスクリーン、個別ボタン、その他(図示せず)といった一又はそれ以上の入力デバイスを具えていても良い。ユーザコントロール37によって、ユーザは、例えばプローブ30をオンオフする、プローブ30をリセットする、その他といった単純な動作を行うことができ、あるいは、プローブ30のより複雑なコントロールも可能である。例えば、ユーザコントロール37によって、プローブ30の感度あるいはその他のパラメータを調整すること、データを遠隔で捕捉し、保存し、送信する、などを行うことができる。
【0041】
選択的に、プローブ30は、アンテナ32、34及び/又はマイクロコントローラ36aを介して取得したデータを記録あるいは保存しておくことができる内部メモリ36fを具えていても良い。例えば、マイクロコントローラ36aは、動作中にデータを自動的に記録することができ、あるいはメモリ36fにデータを選択的に保存するよう指示を受けることもできる。更に、あるいは代替的に、マイクロコントローラ36aは、例えば保存、表示、その他のために、一又はそれ以上の外部デバイスにデータを送信することができる。例えば、プローブ30は、一又はそれ以上のケーブル(図示せず)を具え、これらのデータを送信するようにしても良く、及び/又は、プローブ30は送信器及び/又は受信器(図示せず)を具え、例えば無線周波数、赤外線、あるいはその他の信号を介して、無線でデータを送信し、及び/又は、コマンドを受信するようにしても良い。
【0042】
図1及び10に示すように、プローブ30の内部構成要素のすべてを、ハウジング又はケース39の中に設けて、プローブ30を内蔵型にすることができる。例えば、ケース39は、プローブ30全体をユーザの手の中に保持することができるように、比較的小さい可搬式のものでも良い。選択的に、図1に示すように、ケース39の第1の端部30aは、ケース39のその他の部分と同じ材料あるいは異なる材料で形成することができる。例えば、第1の端部30aは、例えば送信アンテナ32から及び/又は受信アンテナ34へ通じる電磁信号の経路を、実質的な妨害なしに容易に収容する材料で形成することができる。選択的に、この材料は、妨害を低減する、インピーダンスをマッチさせる、あるいはプローブ30を介して患者の身体の外へ信号を容易に送受信するように選択することができる。これに加えて、又は代替的に、所望であれば、プローブ30は、プローブ30の保持又は操作を容易にする、ハンドル、フィンガーグリップ、及び/又は、その他の機構(図示せず)を具えていても良い。
【0043】
代替的に、図11に示すように、ハンドヘルドプローブ131から遠隔のケースに一又はそれ以上の構成要素を具える個別のコントローラ139を具えるプローブ機器130が提供されている。例えば、ハンドヘルドプローブ131は、先端131bに一又はそれ以上のアンテナ132を有する細長ハウジング131aを具えていても良い。コントローラ139は、上述の実施例と同様に、アンテナ132、ディスプレイ138、その他を制御する一又はそれ以上のプロセッサを具えていても良い。ハンドヘルドプローブ131は、一又はそれ以上のケーブル133によってコントローラ139内のプロセッサに接続することができる。例えば、インパルス発生器、インパルス受信器、及び/又は、ゲートコントロールをコントローラ139のケース内に設けても良く、選択的に、所望の場合はハウジング131a内に設けても良い。一実施例では、ケーブル133は、コントローラ139のコネクタ(図示せず)に取り外し可能に接続して、ハンドヘルドプローブ131のアンテナ132をコントローラ139の電子機器に電気的に接続することができる。このように、ハンドヘルドプローブ131は使い捨て可能な、単回使用デバイスであっても良いが、コントローラ139は、コントローラ139に新しいハンドヘルドプローブ131を接続することによって、複数の手順で使用することができる。このことは、以下に更に説明するように外科の分野外にも適用でき、所望の場合、アクセス可能及び/又は可視的なままである。
【0044】
図2A乃至5を参照すると、図1の位置決めシステム10は、例えば、胸部生検や腫瘍摘出手術などの医療処置の間に用いて、例えば、病変やその他のターゲット組織領域42の位置決めを容易にする、及び/又は、胸部41又はその他の身体構造から検体の切除及び/又は除去を容易にすることができる。なお、システム10は、胸部病変の位置決めに特に有益であると記載されているが、システム10は、例えば本明細書に記載されているような身体のその他の領域にあるその他の物体の位置決めにも使用することができる。
【0045】
この手順を行う前に、例えば腫瘍やその他の病変など、ターゲット組織領域を従来の方法を用いて特定することができる。例えば、図2Aに示すように、胸部41内の病変部42を、マンモグラフィ及び/又はその他の画像を用いて特定し、病変部42を除去する決定が行われる。腫瘍42を囲む破線44は、「明確な」マージンを規定しており、例えば、手順を行う間に除去するべき所望の組織検体46のサイズと形状を表示する。例えば、マージン44を選択して、検体46を除去した後の残りの組織が、実質的に癌性あるいはその他の望ましくない細胞ではないことを確実にする。例示的実施例では、病変部42の外側境界と、組織検体46の外側エッジ又はマージン44間の距離が、約1乃至10mmの間であり、例えば、少なくとも約2mmあるいは少なくとも約1cmである。
【0046】
図2A及び2Bを参照すると、位置決めワイヤ20を、例えば、患者の皮膚48から中間組織を通って、ターゲット26が病変部42内に位置するまで組織40を介して経皮的に導入することができる。例示的実施例では、位置決めワイヤ20を送達シース(図示せず)を通して導入することができる。このシースは、本明細書で図20乃至22を参照して説明したカニューレ340と同様に、針及び/又は拡張器(図示せず)を用いて事前に配置することもできる。例えば、カニューレ又は鋭利な先端を有する送達シースは、例えば超音波又はX線撮像をガイダンスとして用いて、皮膚48と中間組織40を通して病変部42へ導入することができ、次いで、位置決めワイヤ20をカニューレを通して進めることができる。代替的に、とがった先端を有する針を組織を通して進めることができ、次いで、送達シースをその針(図示せず)の上に、例えば針と送達シースの間の拡張器と共に進めることができる。送達シースが位置決めされて皮膚48から病変部42に延在したら、針と拡張器を除去する。次いで、位置決めワイヤ22の遠位端22bを送達シースを通して、ターゲット26が病変部42内に位置するまで前進させて、送達シースを取り外す。選択的に、位置決めワイヤ22は、遠位端に、例えば、放射性不透過性マーカあるいは音波を発生するマーカなど、一又はそれ以上のマーカ(図示せず)をターゲット26の上又は近傍に具えており、ターゲット26及び/又は位置決めワイヤ22の遠位端22bを容易に撮像するようにしても良い。位置決めワイヤ20を導入する間及び/又は導入後に、外部撮像を行って、ターゲット26が病変部42内に確実に正しく配置されるようにしても良い。
【0047】
位置決めワイヤ20が、とげ24などの固定要素を具えている場合、このとげ24は、位置決めワイヤ20が送達シースを通って、前進するときに内側に圧縮される。ターゲット26が病変部42内に位置すると、送達シースが引き抜かれ、とげ24が弾性的に近傍組織内へ外側に向けて拡開する。このように、シャフト22の遠位端22b上のとげ24は、位置決めワイヤ20を病変部42に対して固定させ、例えば、ターゲット26が病変部42内の固定位置にほぼ固定されるようにしても良い。これに加えて、あるいは代替的に、包帯、テープ、その他(図示せず)を用いて、位置決めワイヤ22の近位端22aを患者の皮膚48に固定するようにして、例えば、位置決めワイヤ22の移動を防ぐようにしても良い。
【0048】
位置決めワイヤ20が正しく位置決めされた、及び/又は、固定された後、図3に示すように、プローブ30の第1の端部30aが、例えば、通常病変部42上方の患者の皮膚48近傍にあるいはこれと接触して配置される、及び/又は、ほぼターゲット26を向くように配置され、作動する。プローブ30の送信アンテナ32(図示せず、図10参照)は、電磁信号31を発信し、これが組織40を通ってターゲット26で反射される。この信号33は、反射されてプローブ30の受信アンテナ34に戻る(図示せず、図10参照)。プローブ30は、例えばターゲット26とプローブ30の第1の端部30a(及び、プローブ30の第1の端部30aが接触している場合は患者の皮膚48)との間の距離52などの、ターゲット26とプローブ30の第1の端部30aとの間の空間的関係を、例えば信号31が移動した距離、信号31の送信と反射信号33の受信との間の時間パッセージ、その他に基づいて、決定する。選択的に、プローブ30は、ターゲット26と第1の端部30aとの間の相対角度を決定して、例えば、切除を行う正しい方向の決定を容易にするようにしても良い。
【0049】
一の実施例では、プローブ30のマイクロコントローラ36a(図示せず、図10参照)が受信した信号をフィルタにかけるか、あるいはこれを分析して、例えば、ターゲット26のサイズ、形状、あるいはその他の特徴の認識に基づいて、ターゲット26を位置決めする。このように、マイクロコントローラ36aは、ターゲット26を自動的に認識して、患者の身体内にあるその他の構造からターゲットを区別することができる。代替的に、マイクロコントローラ36aは、ターゲット26を推定して位置決めするプローブ30へ信号を反射して戻す対象物を単に位置決めすることができる。例えば、マイクロコントローラ36aは、プローブ30の第1の端部30aからの距離52及び/又はこの端部に直交して延在する軸に対する角度を計算して、ディスプレイ38上の空間情報を表示する。この情報は、ターゲット26、ひいては病変部42の位置決めを容易にし、例えば、病変部42を含むターゲット組織領域にアクセスする切開の方向と深さを提供することによって、病変部42の上にある組織を切除する外科医にガイダンスを提供する。
【0050】
これに加えて、あるいは代替的に、所望の場合にその他の情報をディスプレイ38に表示することができる。例えば、ディスプレイ38は、ターゲット26とターゲット組織検体46の外側マージン44との間の距離54を提供し、この距離で除去する組織検体46の目標サイズと形状を容易に規定することができる。距離54を決定するためには、プローブ30は、所望のマージン44とターゲット42との間の所定の距離を、例えば、プローブ30のプロセッサ36にプログラムされており予め設定されたパラメータに基づいて、あるいは、手順の直前に例えば、ユーザコントロール37(図示せず、図10参照)を介してユーザによってマイクロコントローラ36aに提供された寸法に基づいて、自動的に差し引いても良い。
【0051】
続いて図3を参照すると、選択的に、プローブ30は、皮膚48に対向するあるいは近傍に及び、所望の場合は取得した空間情報に配置することができる。このような情報は、外科医が、例えば、病変部42への最短路など、切除のための最適アプローチを行う経路を決定するのを容易にする、又は、病変部42に対して外科医を三次元で方向づけるよう補助する。患者の皮膚48と皮膚48上の所望の位置からのターゲット26間の距離52を決定した後、図4に示すように、組織40を切除して組織検体46の所定の外側エッジ44に到達する。例えば、プローブ30が配置された位置において患者の皮膚48を切開し、マージン44に対応する深さに達するまで、既知の方法を用いて中間組織を切除する。選択的に、切除を行っている間はいつでも、プローブ30と取得した時空間情報を露出した組織に対向してあるいはその近傍に配置して、このアプローチ、及び/又は、切除の深さを確認できる。
【0052】
図4を更に参照すると、所望であれば、外科医が所望のマージン44が達成されたと思ったら、プローブ30によって別の長さの測定を行い、ターゲット26に対する所望の距離54は達成されたことを確認する。例えば、プローブ30の第1の端部30aを切除した組織領域の底面に接触させて配置し、信号31を送信アンテナ32によって送信し、信号33を受信アンテナ34で受信して、プローブ30が切除した組織領域の底面とターゲット26との間の距離を決定することができる。組織検体46の所望のマージン44に達していることを確認した後、組織検体46を、従来の腫瘍摘出手術を用いて、除去した検体46内にターゲット26を残して、摘出する又は除去することができる。所望であれば、例えば、シャフト22の遠位端22bを切り取る、シャフト22とターゲット26との間のコネクタ(図示せず)をはずす、その他によってターゲット26をシャフト22から分離して、検体46の除去を容易にする。
【0053】
図5を参照すると、所望であれば、プローブ30が、例えば、所望のマージン44がターゲット26の周囲に達成され、その結果病変部42の周囲に達成されるのを確認するように、切除した検体46を分析するために使用されても良い。図に示すように、プローブ30によって送信信号31が送信され、信号33がターゲット26で反射されてプローブ30で受信される。この時、プローブ30が距離54及び/又はその他の空間情報を決定して、表示する。このようにして、所定の組織マージンが達成されたことを確認することができる。
【0054】
図6乃至9を参照すると、病変、又は例えば複数の触診不可能な病変部142など、その他の組織構造を位置決めするシステム110別の例示的実施例が示されている。このシステムは、プローブ30と、複数のインプラント可能なマーカ又はターゲット120を具える。プローブ30は、可搬デバイスであり、本明細書に記載した実施例と同様に、電磁信号を送信し、反射信号を受信することができる。
【0055】
マーカ120は、組織を通って、病変部142周辺領域に導入するサイズの複数のインプラント可能なエレメントを具えている。例えば、マーカ120は、複数のストリップ、シリンダ、らせん、球、その他として形成されていても良く、図1に関連して上述したターゲット26、及び/又は、例えば、図23A乃至28C、34A、34B、41A及び41Bを参照して更に本明細書に記載されているマーカと同様に、プローブ30によって送信された電磁信号の反射を強化する構造を有する。
【0056】
図6に示すように、マーカ120は、例えば、長さ約0.5乃至4mm、幅約0.5乃至2.0mm、厚さ約0.5乃至3.0mmの、長方形あるいはその他の形状のマーカなど、細長いストリップであっても良い。このマーカ120は、金属又はその他の材料でできており、例えば、所望の誘電率を有しており、プローブ30による反射を強化することができる。これに加えて、あるいは代替的に、マーカ120を生体吸収性材料で構成しても良く、例えば、マーカ120を組織内にインプラントし、数日後、数週間後、又は数ヵ月後といった時間がたつと組織に溶けるあるいは吸収されるようにしても良い。
【0057】
選択的に、マーカ120を、放射線不透過性材料、放射性材料、及び/又はエコー発生材料で形成して、例えば導入中、手術中に配置した後、あるいはマーカ120が術後患者の体内に残っている場合はその後、などにマーカ120の撮像あるいはモニタリングを容易にするようにしても良い。これに加えて、所望の場合、各マーカ120は、本明細書に述べたように、一又はそれ以上の当該マーカをその他のものから識別できる、表面、形状、及び/又は追加の材料構成を有していても良い。例えば、各マーカ120は、所定の方法でプローブ30からの入射信号を変調する、及び/又は、マーカ120に特異的な特別な電磁信号を吸収又は反射するようにしても良く、マーカを独自に同定するのに使用することができる。
【0058】
更に、図6に示すように、システム110も患者の身体内にマーカ120を導入する一又はそれ以上の送達デバイス160を具える。例えば、送達デバイス160は、近位端162aと、組織を通ってターゲット組織領域(図示せず)へ導入し、一又はそれ以上のマーカ120を担持するサイズの遠位端162bとを具える、シャフト162を具えていても良い。送達デバイス160は、シャフト162の近位端及び遠位端162a、162bの間に少なくとも部分的に延在するルーメン164と、シャフト162内で摺動可能で一又はそれ以上のマーカ120を連続的にあるいは独立してルーメン164から選択的に送達する押出部材166を具える。
【0059】
図に示すように、シャフト162の遠位端162bは斜めになっている及び/又はとがっており、シャフト162を組織を通って直接導入できる。代替的に、本明細書に記載したように、送達デバイス160を、組織内に予め配置しておいた、カニューレ、シース、あるいはその他の筒状部材(図示せず)を通して導入するようにしても良い。選択的に、遠位端162bは、例えば、放射線不透過性、エコー発生、あるいはその他の材料で形成した、バンドあるいはその他の構造を具えていても良く、例えば、蛍光透視法、超音波、電磁信号、その他を用いて導入中に遠位端162bのモニタリングを容易にすることができる。
【0060】
図に示すように、押出部材166は、マーカ120近傍のルーメン164内に配置したピストン又はその他のエレメント(図示せず)と、当該ピストンを前進させてルーメン164からマーカ120を押し出す、ピストンに連結されたプランジャ又はその他のアクチュエータ168を具えている。図に示すように、プランジャ168を手動で前進させて、ルーメン164から連続的に一又はそれ以上のマーカ120を送達することができる。代替的に、トリガデバイス又はその他の自動アクチュエータ(図示せず)をシャフト162の近位端162bに設けて、各動作でピストンを十分に前進させて、例えば、遠位端162bから個々のマーカ120を送達するようにしても良い。
【0061】
図6乃至9を参照すると、マーカ120とプローブ30を用いて、胸部41又はその他の組織構造内の病変又はその他のターゲット組織領域142を位置決めする、例示的な方法が示されている。図6及び7に示すように、マーカ120を組織40内にインプラントして、切除すべき組織検体146の所望のマージン又は体積144を描写するようにしても良い。例えば、送達デバイス160のシャフト162は、患者の皮膚48を通って、中間組織40を通って経皮的に挿入し、外部撮像を用いるなどして、遠位端162bを所望の位置にガイドして、病変部142内あるいはその周辺に遠位端162bを配置することができる。正しい位置に配置されると、プランジャ168を前進させて(あるいは、シャフト162をプランジャ168に対して後退させて)、組織にマーカ120を送達することができる。送達デバイス160は更に別の位置に前進させ、及び/又は胸部41から完全に除去して皮膚48の別の位置を通ってターゲット組織領域に前進させ、例えば、一又はそれ以上のマーカ120を送達するようにしても良い。
【0062】
代替的に、送達デバイス160は単一のマーカ120を担持するようにして、複数送達デバイス(図示せず)を設けて、各マーカ120を送達するようにしても良い。更に、あるいは代替的に、定位デバイス(図示せず)を用いて、例えば、患者の身体内に所望の三次元アレイの形の一又は複数の送達デバイス、又は、病変部142の位置を認識するその他の構成を導入するようにしても良い。更なる代替例では、マーカ120を、ワイヤ10と同様の複数の位置決めワイヤ、順次又は同時に送達することができる一又はそれ以上のカテーテル(図示せず)、その他で置き換えることができる。選択的に、カテーテル、ワイヤ、あるいはその他のデバイスは、例えば遠位領域(図示せず)で拡張可能であり、検体の体積あるいは領域の拡大及び/又は位置決めを容易にすることができる。
【0063】
図6及び7に示す例示的実施例では、例えば、病変部142の周囲の検体体積を除去する手術の前、あるいはその間にマーカ120が触診不可能な病変群142の周囲を囲んでいる。組織検体146の外側エッジ144と、病変部142との間の距離156を選択して、除去された組織の体積が、上述した方法と同様に、はっきりしたマージンを確実にするのに十分な組織の体積を除去するように選択することができる。
【0064】
図7に示すように、マーカ120をインプラントした後に、プローブ30を患者の皮膚48に対してあるいはその近傍に配置して(例えば、信号を組織40に送信したり、組織40から受信したりするのに患者の皮膚48にプローブ30を接触させる必要はない)、プローブ30を用いて、上述の実施例と同様に、プローブ30とマーカ120との間の距離152(及び/又はその他の空間情報)を測定することができる。特に、プローブ30から出射した信号31がマーカ120で受信され、反射されてプローブ30内の受信器に信号33として戻り、プローブ30はこの信号を用いて、患者の皮膚48とマーカ120との間の距離152を測定する。
【0065】
次いで、病変部142を囲む組織40を、図8に示すように、マーカ120の一つにあたるまで切除する。この時点で、プローブ30を用いて別の測定を行い、正しい切除深さを確実なものにすることができる。次いで、プローブ30を図8に点線で示すように再配置して、組織検体146の周辺部144の周りに別のマーカ120を配置する。距離測定の結果を用いて、病変部142の周りの切除用の所望のマージン体積を測定することができる。この手順を所望するだけ繰り返して、病変部142の周りの組織検体146を切除する間に、マーカ120の距離に基づいて所望のマージンを容易に測定することができる。組織検体146は、マーカ120を含んでおり、すべてのマーカ120を組織検体146と共に除去するようにしても良い。代替的に、所望のマージンをマーカ120内に規定して、組織検体146を除去した後にマーカ120が胸部内に残るようにしても良い。この代替例では、マーカ120は生体吸収性であるか、あるいは不活性で、永久に患者の胸部41に残るものであっても良い。
【0066】
図11乃至15を参照すると、胸部41内の一又はそれ以上の病変部142を特定する及び/又は病変部142を含む組織検体146(図14A乃至15Aに示す)を除去する、別の例示的システム及び方法が示されている。上述の実施例と同様に、このシステムは一又はそれ以上のマーカ220とプローブ機器130を具え、病変部142の位置決め、及び/又は胸部41から除去した組織検体146の所望のマージンの確実な達成を容易にしている。プローブ機器130は、上述したように、プローブ131の動作を制御する一又はそれ以上のプロセッサを有するプロセッサ139に連結されたハンドヘルドプローブ131を具える。同じく上述したように、ハンドヘルドプローブ131は、プローブ131の一方の端部の先端131b上にあるいは中に一又はそれ以上のアンテナ132を具える細長ハウジング131aを有しており、このハウジングを、皮膚48、又はその他の組織に対して、及び/又は、マーカ220及び/又は病変部142の方向にほぼ向けて配置することができる。
【0067】
プロセッサ139は、上述の実施例と同様に、アンテナ132、ディスプレイ138、その他を制御する一又はそれ以上のプロセッサを具えていても良い。ハンドヘルドプローブ131は、一又はそれ以上のケーブル133によってプロセッサ139に接続されている。例えば、インパルス発生器、インパルス受信器、及び/又は、ゲートコントロールをプロセッサ139内に設けることができ、これらは、アンテナ132を介して信号を発信受信するように制御される。
【0068】
選択的に、図14及び14Aに示すように、ハンドヘルドプローブ131は、例えば、ハウジング131aの先端131bから延在する切除構造133を具えている。一の実施例では、この切除構造133は、例えば、長さ約10乃至50mm及び/又は幅約1乃至10mmの、プローブ131の先端131bに固定された比較的フラットで先の丸い切除器であっても良い。代替的に、切除構造133は収納可能であり、例えば、切除構造133が初めはハウジング131a内に収納されているが、組織の層を切除してマーカ220近傍の組織にアクセスしたい場合に、選択的に展開するようにしても良い。更なる代替例では、切除構造133は、とがった刃又はエッジを具えており、患者の皮膚48及び/又はその下の組織層40を容易に切開することができる。
【0069】
まず、図11に示すように、使用中は、一又はそれ以上のマーカ220を、例えば、本明細書に記載されているマーカ及び/又は方法を用いて、ターゲット組織領域内にインプラントする。例えばケーブル133によってプロセッサ139にプローブ131を接続し、プローブの先端131bを皮膚48に対して配置する。プローブ131を作動させて、例えば、プローブ131の先端131bからマーカ220の初期距離をアンテナ132を用いて測定し、これによって病変部142におおよその距離を提供する。この距離の測定は、例えば図12に示すように、プロセッサ139のディスプレイ138上に表示され、及び/又は、ユーザに提供される。これに加えて、あるいは代替的に、上述した通り、合成音声、対応する距離を同定する一又はそれ以上のトーン、その他を用いて距離を同定するなど、スピーカが距離の測定を行うようにしても良い。例えば、プロセッサ139は受信した信号を分析して、プローブ131の先端131bからマーカ220への実際の距離を測定することができ、また、スピーカを介して実際の距離を提供することができる。代替的に、スピーカが、例えば、第1のスレッシュホールドに対する第1のトーン、第2のより近い距離に対する第2のトーン又は複数のトーンといった、所定のスレッシュホールドに対応するトーンを提供して、これらがマーカ220により近くなっている旨を表示することができる。
【0070】
図11に示すように、胸部41の第1の側部にあるプローブ131を用いて、測定値L1を得、一方、胸部41の反対側の第2の側部に配置したプローブ131’を用いて、L1より大きい測定値L2を得る。この情報を用いて、外科医は、第1の側部の切除を開始することを決定する。なぜなら、この情報は、図12に示すように、第2の側部から開始した経路より、より少ない組織切除を必要とする、短い経路を提供するためである。
【0071】
図13を参照すると、プローブ131を用いて、マーカ220の周りに、続いて病変部142の周りに所望のマージンL3を特定することができる。例えば、1cmの所望のマージンL3が求められている場合、プローブ131は、ディスプレイ138上に示すようにプローブ131からマーカまでの実際の距離L1を表示又は提供して、これによって、マージンL3の外側にプローブ131が残っていることを表示する。代替的に、プロセッサ139が所望のマージンL3を認識すると、ディスプレイ138は、実際の距離L1と所望のマージンL3との間の差(すなわち、L1−L3)を提供し、これによって、外科医に所望のマージンを得るのに必要な切除深さを通知する。
【0072】
選択的に、図14及び14Aに示すように、プローブ131が先の丸い切除器144を具える場合、この切除器144はプローブ131の先端131bから展開させて(永久的に展開しない場合は)、組織40を通ってマーカ220に向けて、例えば所望のマージンL3が得られるまで前進させる。プローブ131は、次いで、先の丸い切除器144を用いて、及び/又は一又はそれ以上の追加の切除器、メス、あるいはその他のツール(図示せず)を用いて、マーカ220の周囲の組織を切除するよう操作される。
【0073】
図15及び15Aに示すように、マーカ220と病変部142を含む組織検体146を胸部41から除去した。選択的に、プローブ131を用いて、所望のマージンL3がマーカ220の周りに達成されていることを確認し、これによって、上述の実施例と同様に、十分な組織が胸部41から除去されたことを確認する。
【0074】
図16Aと16Bを参照すると、一又はそれ以上のマーカ220と、一又はそれ以上のアンテナ232を担持する指サック231aを具えるプローブ231と、アンテナ232に例えばケーブル233で接続されているプロセッサ239と、を具えるシステムの更に別の実施例が示されている。指サック231aは、柔軟なスリーブであり、これは、例えば、指90を入れる開放端231bと、閉鎖端231cを具え、指90を超えて確実に受け入れる十分な長さを有する。例えば、指サック231aは、外科用あるいは検査用手袋と同様に、指90を受けて収納する一方で、指サック231aが使用中に指90が滑らないように内側に圧縮するように、拡張する十分な柔軟性を有する、比較的薄いラテックス層、天然あるいは合成ゴム、などの弾性材料で形成することができる。
【0075】
図に示すように、閉鎖端231c近傍にアンテナ232を設けることができる。例えば、アンテナ232は、上述の実施例と同様に、ケースの中に送信アンテナと受信アンテナ(図示せず)を具えていても良い。このケースは、指サック231aに、例えば閉鎖端231c近傍で、例えば、接着剤を用いた接着、溶融、一又はそれ以上のバンド(図示せず)、その他により取り付けることができる。
【0076】
プロセッサ239は、アンテナ232を動作させる及び/又はアンテナ232から受信した信号を処理するため、上述の実施例と同様に、例えばアンテナ232にケーブル233で接続され、ディスプレイ238を具える一又はそれ以上の構成要素を具えている。図に示す実施例では、プロセッサ239は、プロセッサ239を指サック231aに指を挿入しているユーザの腕に取り外し可能に固定する、一又はそれ以上のクリップ239a、ストラップ、ベルト、クランプ、あるいはその他の構造(図示せず)を具える。例えば、クリップ239aは、ユーザの前腕の周りに部分的に延在するように曲がっていても良く、クリップ239aは、クリップを開いてその中に腕を受けるのに十分な柔軟性があり、アームの周りに少なくとも部分的に係合するよう弾性的な閉じたものであっても良い。代替的に、プロセッサ239は、上述したプロセッサ139と同様に、患者及び/又はユーザから離れて配置したケース(図示せず)に配置することができる。
【0077】
図17及び18を更に参照すると、使用中に、外科医あるいはその他のユーザは、例えば人差し指や親指などの指90を指サック231aに入れることができ、プロセッサ239を作動させて、上述の実施例と同様に、アンテナ232を介して信号を送受信する。
【0078】
図17に示すように、指サック231aに入れた指90を患者の皮膚48に対して配置し、距離の測定値を得てマーカ220への距離を特定することができる。マーカ220の上の組織が切除されると、ユーザは、図18に示すように、そこにできた経路に指90を入れて、マーカ220の位置をユーザに直接フィードバックし、次いで、指90に対する病変部142の位置をフィードバックする。このように、この実施例は、距離の測定と共に触覚フィードバックをプローブ231に提供するものであり、マーカ220と病変部142を含む組織検体146の切除及び/又は除去を容易にする。例えば、図17に示すように、最初の測定距離L1が得られ、必要な切除深さをユーザに通知する一方、図18に示すように、測定距離L2を得て(所望のマージンに対応する)、これによって、上述の実施例と同様に、十分な切除が行われたこと、及び組織検体146が分離除去できることをユーザに通知する。
【0079】
図19乃至22を参照すると、例えば一又はそれ以上の病変部142を含むターゲット組織領域を位置決め及び/又はアクセスする更に別のシステムが示されている。一般的に、このシステムは、上述した実施例と同様に、プロセッサ339に接続されたハンドヘルドプローブ331を具える、プローブ機器330を有する。例えば、プローブ331は、一又はそれ以上のアンテナ332を具え、プロセッサ238はディスプレイ338を具える。
【0080】
更に、このシステムは、近位端342、遠位端344、及びこれらの間に延在するルーメン346を具えるカニューレ又はその他の筒状部材340を具える。カニューレ340は、図19に示すように、プローブ331をルーメン346内に受けることができるようなサイズを有する、実質的に硬質の筒状ボディである。図に示すように、遠位端344は斜めになっていたり、とがっていたり、及び/又は組織を通って直接の前進を容易にするように形成することができる。代替的に、遠位端344は、テーパを付ける、及び/又は、丸みが付けられていても良く(図示せず)、上述の実施例と同様に、例えば針が組織40内に導入される前又は後に、カニューレ340が針の上を前進するようにしても良い(図示せず)。
【0081】
図19を参照すると、使用前に、プローブ330をカニューレ340のルーメン346に挿入して、例えば、アンテナ332をカニューレ340の遠位端344の直近に配置する。選択的に、カニューレ340及び/又はプローブ331は、プローブ331をカニューレ340に開放可能に固定する一又はそれ以上のコネクタ(図示せず)を具え、例えば、アンテナ332を遠位端344近傍に維持する一方で、必要があればプローブ331を取り外せるようにしても良い。更に、あるいは代替的に、カニューレ340は一又はそれ以上のシール(図示せず)を、例えば近位端342及び/又は遠位端344内に具え、プローブ331をルーメン346内に配置する及び/又はプローブ331を取り外すときに、実質的に液密シールを提供するようにしても良い。例えば、止血シール(図示せず)を近位端342に設けて、ルーメン346を通る液流を防ぐシールを提供すると共に、ルーメンを通るプローブ331あるいはその他の機器(図示せず)を受けて収納する。
【0082】
図20を参照すると、使用中に、カニューレ340内で作動しているプローブ331を用いて、カニューレ340の遠位端344を患者の皮膚48と組織40を通ってマーカ220へ挿入することができる。図に示すように、プローブ331は信号31を送信し、プロセッサ339のディスプレイ338は、距離測定値L1、あるいはアンテナ332で受信した反射信号に基づくアンテナ332に対するマーカ220の相対位置のその他の表示、続いて、カニューレ340の遠位端344に対するマーカの位置を提供することができる。このように、カニューレ340の貫通深さ及び/又は進行方向を、プローブ331とプロセッサ339によって提供される情報に基づいて調整することができる。例えば、図21に示すように、カニューレ340は、所望の距離L2が達成されるまで前進させて、これによって、遠位端344を、例えば、病変部142近傍のターゲット組織領域内の、マーカ220から所望の距離だけ離して配置する。
【0083】
図22を参照すると、病変部142に対して所望の位置に配置されたカニューレ340の遠位端344を用いて、プローブ331を取り外し、図に示すように、カニューレ340を適所に置く。カニューレ340は、これによってターゲット組織領域にアクセスする経路を提供し、例えば、一又はそれ以上の診断及び/又は治療プロセスを実行する。例えば、針あるいはその他のツール(図示せず)をカニューレのルーメン346を通して前進させて、生検を行う及び/又は流体あるいはその他の診断又は治療用材料をターゲット組織領域に送達する。更に又は代替的に、例えば病変部142を含む組織検体を除去するために一又はそれ以上の機器(図示せず)をカニューレ340を通して導入し、放射線治療及び/又はその他のプロセスを送達する。アクセスが不要になったら、カニューレ340を単に取り外す。代替的に、プロセスを行う間にカニューレ340を再配置する必要がある場合は、プローブ331をルーメン346に再度導入して、更なるガイダンスを提供するプローブ331を用いて組織内にカニューレ340を再配置する。
【0084】
図11乃至22には、例えば病変部142内あるいはその近傍に、上述したものと同様の方法を用いて組織40内にインプラントできるあるいは組織40内に配置できるマーカ220が示されている。図に示すように、マーカ220は一般的に、球形の端部間に比較的狭い中央ステム部分を有するほぼ細長のボディを具える。マーカ220は、所望の材料で形成されていても良く、及び/又はこの材料の中のその他のマーカと同様の表面特徴を具えていても良い。この特徴により、マーカ220の位置決め及び/又はマーカ220を互いに区別することが容易になる。
【0085】
図23A乃至28Cを参照すると、マーカの更なる実施例が示されており、これらの実施例は本明細書に記載されているいずれのシステム及び方法にも使用することができる。例えば、図23A乃至23Cを見ると、第1の例示的マーカ320が示されており、このマーカは、複数のビーズ又はセグメント324を担持したコアワイヤ322を具える。コアワイヤ322は、例えば、直径又はその他の最大断面が約0.5乃至2mm、長さ約1.0乃至10mmの中実あるいは中空構造の、細長部材である。コアワイヤ322は、弾性材又は超弾性材、及び/又は、例えばステンレススチール、ニチノールなどの形状記憶材料で形成されており、コアワイヤ322がバイアスされて、以下に更に説明するように、組織内で展開した時に所定の形状になる。代替的に、コアワイヤ322は、ほぼ硬質であって、以下に更に説明するようにマーカ320が直線状あるいは曲線状など、固定形状を維持するものでも良い。
【0086】
図24A乃至24Cに最も良く見られるように、ビーズ324は、例えば、各々がほぼ筒状又は球形の一部を規定している複数の個々の環状ボディを具えていても良い。ビーズ324は、上述の実施例と同様に、例えば、ステンレススチール、ニチノール、チタン、その他、などの金属、プラスチック材料、あるいは合成材料といった所望の材料で形成することができる。ビーズ324は、射出成形、鋳型、機械加工、切断、研磨、その他を行うことによって形成できる。更に、所望の仕上げを、例えば、サンドブラスト、エッチング、化学蒸着、その他によってビーズ324に施すようにしても良い。
【0087】
図24Bに最も良く見られるように、各ビーズ324は、その中にコアワイヤ322(図示せず、例えば図23A乃至23Cを参照)を受ける経路326を具えている。ビーズ324は、コアワイヤ322上に固定する際に、少なくとも部分的に互いに隣接して入れ子式にして、さらに、例えばコアワイヤ322が形状を変えるようにマーカ320の形状を変えるような形状及び/又は表面構造を具えている。更に、ビーズ324は、例えばレーダーなど電磁波の反射を強化する、例えば、ビーズの周辺の周りに一又はそれ以上の溝を有する表面ジオメトリを具えている。この溝は、約45°乃至135°の、あるいは約90°といった、急な角度を規定する隣接する面を伴う複数の面を具える。例えば、図24Cに最も良く見られるように、各ビーズ324は、第1の凸部又は球状端部324aと、平坦面324dを有する第2の凹状端部324bを具える。図25Bに示すように、隣接するビーズ324’は、第1のビーズ324の凹状端部324b’の平坦面324d’と、隣接するビーズ324’の球状端部324a’の表面324e’との間の溝324c’を規定している。面324d’及び324c’は、これらの間の急な角部を規定しており、これらの角部は、例えば、約90°の角度を規定して、レーダーを用いた検出を強化している。
【0088】
選択的に、図25A及び25Bに示すように、ビーズ324’は、電磁信号がビーズ324’の表面に当たったときに発生する反射信号をカスタマイズするようにした所望の面仕上げ324f’を具えていても良い。例えば、面仕上げ324f’は、ビーズ324’に形成され、所望の径及び/又は深さを有する複数の孔又は凹みを具えていても良い。上述した通り、本明細書に記載されているプローブとプロセッサは、このような反射信号を分析して、例えば、複数のマーカがインプラントされている場合、あるいは患者の身体内に配置されている場合に、特定のマーカを独自に同定することができる。
【0089】
図23A乃至23Cを参照すると、組み立てを行う間に、複数のビーズ324をコアワイヤ322の上に配置してこれに固定し、最終的なマーカ320を提供することができる。例えば、ビーズ324がコアワイヤ322の端部間にほぼ延在するまで、ビーズ324の経路326にコアワイヤ322を連続的に挿入する。ビーズ324はコアワイヤ322に、例えば個々のビーズ324をコアワイヤ322にクリンプする、十分なビーズ324の上を摺動させた後コアワイヤ322の端部をクリンプする、又は膨張させる、接着剤で接着する、溶融させるなどによって、コアワイヤ322に固定することができる。このように、ビーズ324は、コアワイヤ322にほぼ永久的に取り付けて、ビーズ324が動かないようにする、あるいは、ビーズ324がコアワイヤ322の上を自在に浮遊することができるようにして、コアワイヤ322、ひいてはマーカ320を、容易に曲げたり、あるいは形を付けられるようにしても良い。
【0090】
代替的に、マーカ320は、単一ピースの材料で形成して、例えば、図23Aに示すビーズ324によって規定した形状と表面をワークピースに形成するようにしても良い。この代替例では、コアワイヤ322をなくすか、あるいは、コアワイヤ322を受ける経路をワークピースに形成しても良い。
【0091】
一実施例では、マーカ320は、例えば図23A及び23Bに示すような直線形状、あるいは図23D及び26A乃至26Cに示すような曲線形状といった、実質的に固定された形状を規定することができる。例えば、マーカ320のコアワイヤ322は、十分に柔軟であり、マーカ320を真っ直ぐにして、例えば、送達デバイスへのマーカ320の装填及び/又はマーカ320の送達を容易にすることができ、更に、マーカ320にバイアスをかけて曲線状あるいはその他の直線形状にしても良い。
【0092】
図23Dに示すように、マーカ320にバイアスをかけて、例えば、平面内蛇行あるいはその他の曲線形状など、波形にするようにしても良い。例えば、コアワイヤ322は、コアワイヤ322にバイアスをかけて波形になるようにセットした形状の弾性あるいは超弾性材で作っても良く、更に、弾性的に伸ばして直線形状としても良い。ビーズ324は、間隔を空けて配置するか、あるいはビーズ324が直線形状と波形の間でのコアワイヤ322の変形と実質的に干渉しないように入れ子式にして、例えばマーカ320の送達デバイスへの装填、及び/又はマーカ320の本体への導入を容易にすることができる。
【0093】
代替的に、図34A及び34Bに示すように、例えば、テーパの付いた端部領域320b’’’間の比較的広い中間領域320a’’’を含むテーパ付きらせん形状になるようにバイアスをかけたマーカ320’’’を提供しても良い。マーカ320’’’’の別の代替実施例が図41A及び41Bに示されており、これは径がほぼ均一ならせん形状になるようにバイアスされている。マーカ320’’’や320’’’’の一つの利点は、これらのマーカがプローブのアンテナ(図示せず)に対するマーカ320’’’や320’’’’の反射角度及び/又は位置に関係なく、比較的一定の及び/又は一貫性のあるレーダー断面(RCS)を提供することである。例えば、マーカ320’’’や320’’’’が、例えば、図34B及び41Bに示すように、らせん軸に沿って見える場合でも、マーカ320’’’や320’’’’は、例えば図34Aや41Aに示すような、らせん軸に対して水平方向に見える場合とほぼ同様のRCSを提供する。
【0094】
選択的に、本明細書に記載したマーカはどれも、受動マーカ、能動マーカ、能動反射器、あるいは能動トランスポンダとして提供することができる。例えば、図23A乃至23Dを参照すると、マーカ320は、単純な「受動反射器」である。すなわち、マーカ320は、マーカ320にあたる入射波又は信号を単に反射するだけである。入射信号は、マーカ320の様々な面及び/又は端部で反射され、例えば、これによって、本明細書で更に述べているようにプローブで検出する反射波又は信号を提供する。受動マーカの一つの欠点は、レーダ断面(RCS)が、プローブのアンテナとマーカ320のアスペクト角に基づいて変化し、これが、マーカ320から反射されて戻ってきた信号の強度を変えることである。
【0095】
代替的に、マーカ320は、「能動反射器」を提供する一又はそれ以上の構造を具えていても良い。すなわち、マーカ320は一又はそれ以上の電子回路を具えており、この回路がマーカ320に当たる信号を所定の方法で、反射信号に外部エネルギィ又は電力を加えることなく変調する。このようなマーカは、変調ダイポール又は、例えば非常にわずかな電流で作動する一又はそれ以上の非常に低出力のダイオード及び/又はFETトランジスタを具える、その他の型の能動反射アンテナを具える能動反射無線エレメントを具えていても良い。能動反射器は、プローブで検出及び同定できる埋め込み組織環境内の実質的に唯一のレーダー信号の特徴を提供する。更に、能動反射器は、プローブに戻す比較的大きい信号を提供し、例えば、これによって、アンテナの形に無関係にターゲットRCSを維持することができる。
【0096】
例えば、マーカ320は、マーカ320に接続されたあるいは埋め込まれた、プローブからの入射波又は信号を偏重する一又はそれ以上の回路又はその他のエレメント(図示せず)を具えていても良い。例示的な実施例では、ナノスケールの半導体チップがマーカ320に担持されており、これは自体のエネルギィ源を持っておらす、従って信号がマーカ320で受信あるいは反射されるときに信号を処理し変調するだけである。マーカに設けることができる能動反射器の例示的な実施例は、米国特許公報第6,492,933号に開示されている。
【0097】
図50A及び50Bは、能動反射器を用いて達成することができる入射信号Aに対する反射信号Bの変調の一例を示す。入射信号Aは、本明細書に記載されているプローブのいずれかのようなプローブ(図示せず)によって送信された波動又は信号を表わしている。図50Aに示すように、入射信号Aは本明細書に記載したマーカのいずれかのような表面に当たり、反射して、反射信号Bになる。受動反射器では、マーカの表面は単に入射信号Aを反射するだけであり、従って、反射信号Bは、入射信号Aと同じ、例えば、帯域、位相、その他の特性を有する。
【0098】
反対に、能動反射器では、マーカが入射信号Aを所定の方法で変調して、例えば、反射信号Bの周波数及び/又は位相を変化させる。例えば、図50Bに示すように、マーカ上の回路は、超広域ブロードバンドレーダー入射信号Aを、例えば約1乃至10ギガヘルツといった比較的帯域が狭い反射信号Bに変える。これは、やはり所定の位相シフトを含む。比較的狭い帯域の反射信号Bは、マーカのRCSを強化し、これによって、プローブの検出を強化する。
【0099】
更に、図50Bに示すように、反射信号Bの位相は、入射信号Aに対して90°変調されている。マーカがこの位相シフトにおいて唯一のものであれば、個の位相シフトによってプローブがマーカを、例えば位相シフト、組織構造、その他が異なるその他のマーカなどの、その他の構造から同定し区別することが容易になる。例えば、複数マーカを患者の本体にインプラントする場合は、各マーカの回路が、反射信号において異なる位相シフト(例えば、+90°、+180°、−90°、その他)及び/又は帯域幅となるように構成する。このように、プローブは、マーカを互いに、及び/又は、患者の身体のその他の構造から、容易に同定し区別することができる。
【0100】
能動反射器の一つの利点は、回路自体に電源が必要でないことである。従って、回路のサイズが実質的に小さくなり、所望であれば、期間を延長して、あるいは、永久的にでも、マーカを患者の身体内にインプラントすることができ、更に、そのマーカがプローブからの信号に応答して、マーカの位置決め及び/又は同定を容易にすることができる。
【0101】
更なる代替例では、励起エネルギィ基準に応じて検出可能なエネルギィを発生する一又はそれ以上の特徴を有する「能動マーカ」を設けるようにしても良い。このような能動マーカの例は、米国特許公報第6,363,940号に開示されている。
【0102】
更なる代替例では、能動トランスポンダが設けられている。これは、例えば、埋め込み組織環境内でレーダー信号特性の独自性を提供するMIRプローブエネルギィを再送する、あるいは「応答する」。能動トランスポンダは、マーカに埋め込まれたあるいはマーカに担持されている一又はそれ以上の電子回路を具え、例えば、一又はそれ以上のバッテリィ、コンデンサ、その他、といった内部エネルギー源を有する。一の例示的実施例では、能動トランスポンダは、マイクロ波受信器及び/又は送信器と、データ処理及び保存エレメント、リターン信号の変調システムを具えている。能動トランスポンダは、プローブから発した励起マイクロ波エネルギィに応じてマイクロ波エネルギィを発生し、例えば、受動マーカでのみ可能であった、より大きい信号をプローブに返す。例えば、マーカは、プローブからの独自のレーダーシグネチュア及び/又は周波数に応じてフォーマットしたデータを含むRFエネルギィを発生する。例示的実施例では、能動トランスポンダは直交変調され、MIRレーダーの上側波帯(USB)又は下側波帯(LSB)のいずれにも単側波帯(SSB)信号を出力する。このようなトランスポンダは、RFスペクトルにわたる多重チャンネル動作の可能性を提供する。
【0103】
図29A及び29Bを参照すると、送達デバイス260が設けられており、これは、例えば胸部41内のターゲット組織領域に組織を取って導入できるサイズであり、マーカ320(あるいは選択的に複数のマーカ、図示せず)を担持する、近位端262aと遠位端262bを有するシャフト262を具える。送達デバイス260は、シャフト262の近位端及び遠位端262a、262bの間に延在するルーメン264と、シャフト262内を摺動可能であって、ルーメン264から図23A乃至23Dに記載のマーカ320を送達する押出部材266を具える。図に示すように、シャフト262の遠位端262bは、斜めになっており、及び/又は、とがっており、シャフト262を組織を通って直接導入することができる。代替的に、送達デバイス260は、例えば、本明細書に記載されているような、組織を通って配置されているカニューレ、シース、あるいはその他の筒状部材(図示せず)を通して導入するようにしても良い。選択的に、遠位端262bは、例えば、放射線不透過性、音波を発生する材料、あるいはその他の材料でできた、バンド又はその他の構造を具えていても良く、これによって、本明細書に記載されているように、導入中に遠位端262bを容易にモニタすることができる。
【0104】
図29Aに示すように、押出部材266は、マーカ320近傍のルーメン264内に配置した遠位端267と、この遠位端267を前進させてルーメン264からマーカ320を押し出すプランジャ又はその他のアクチュエータ268を具える。図29Bに示すように、送達デバイス260の遠位端264が組織40内の所望の位置に前進すると、シャフト262がプランジャ268に対して後退して、マーカ320を順次ルーメン264から押し出す。代替的に、トリガ装置あるいはその他の自動アクチュエータ(図示せず)をシャフト262の近位端262aに設けて、遠位端262bからマーカ320を送達するようにしても良い。
【0105】
図26A乃至26Cを参照すると、マーカ320’’の代替の実施例が示されており、これは、図23A乃至23Dに示すマーカ320とほぼ同じであり、例えば、複数のビーズ324’’を担持するコアワイヤ322’’を具える。しかしながら、マーカ320と異なり、コアワイヤ322’’はらせん形状になるようバイアスがかかっており、例えば、マーカ320’’は図に示すようならせん構造にバイアスされている。従って、マーカ320’’は、例えば、図29A及び29Bに示す送達デバイス260などの送達デバイスへの装填を容易にするために、真っ直ぐにすることができ、更に、らせん構造に弾性的に戻るようにバイアスを掛けることができる。
【0106】
代替の実施例では、マーカ320、320’、又は320’’のいずれも、少なくとも部分的に形状記憶材料で形成することができ、例えば、ターゲット温度に温められるとマーカがバイアスされて所望の形状を取るようにしても良い。例えば、図24のマーカ320を参照すると、コアワイヤ322が、例えばニチノールなどの形状記憶材料で形成されており、コアワイヤ322は、例えば20℃又はそれ以下、といった周囲温度で、あるいはそれより低い温度でマルテンサイト状態になり、例えば、37℃又はそれ以上、といった体温又はそれ以上の温度でオーステナイト状態になる。マルテンサイト状態では、コアワイヤ322は比較的柔らかく可鍛性であり、例えばマーカ320が真っ直ぐにされ、図29A及び29Bの送達デバイス260に装填されても良い。コアワイヤ322の形状記憶は、コアワイヤ322がターゲット温度に温められると、コアワイヤ322が波形、らせん、あるいはその他の非直線形状にバイアスされるように、その材料が温度設定、あるいはプログラムされている。従って、マーカ320は、マルテンサイト状態にある間に、曲げられている、直線状である、あるいは所望の展開形状から変形されている場合でも、マーカ320は、一旦患者の身体に導入されると、あるいはターゲット温度に温められると、自動的に、展開構造を取るようにバイアスされる。
【0107】
図27A乃至27Cを参照すると、マーカ420の別の例示的実施例が示されている。マーカ320と同様に、マーカ420は、複数のビーズ又はセグメント424を担持するコアワイヤ422を具える。各ビーズ424は、本明細書に記載されているように、例えば、プローブ(図示せず)からの信号の反射を強化する、複数の溝424cを具える。コアワイヤ422とビーズ424は、上述の実施例と同様に製造し組み立てることができ、例えば、ビーズ424は、自在に回転するか、あるいはコアワイヤ422に固定されている。溝424cは、上述の実施例と同様に、各ビーズ424に全体的に形成しても良く、あるいは、隣接するビーズ(図示せず)の協動面によって規定されていても良い。溝424cは、ほぼ平坦な面あるいは曲面を規定していても良く、これらの面は、レーダー検出を強化する角部を規定する急峻なエッジで合致している。
【0108】
選択的に、図28A乃至28Cに示すように、球形マーカ520、520’、520’’の代替実施例が示されており、これらのマーカは、形状及び/又は構造が異なる溝524c、524c’、524c’’を具える。溝524c、524c’、524c’’は、実質的に互いに異なる反射信号を生成し、上述した通り、例えば、プローブのプロセッサが様々な反射信号に基づいて異なるマーカを区別できるようにしている。図28A乃至28Cに示す実施例では、マーカ520、520’、520’’が、単一ピース材でできており、コアワイヤと複数ビーズを具えていない。所望であれば、マーカ520、520’、520’’にコアワイヤと複数ビーズを設けること、及び/又は、図27A乃至27Cのマーカ420を、所望であれば、単一ピース材で形成できることは明白である。
【0109】
図30A乃至31Bを参照すると、送達デバイス360の別の実施例が示されており、これは、図23A乃至23Dに示すマーカ320などのマーカ320の送達に使用されるが、代替的に本明細書に記載のいずれのマーカであっても良い。一般的に、送達デバイス360は、例えば、胸部41内といった、ターゲット組織領域に組織を通って導入するサイズの針又は、近位端362aと遠位端362bを具えるその他の通常シャフト362と、近位端及び遠位端362a、362bの間に延在するルーメン364とを具える。送達デバイス360も、シャフト362内を摺動可能で、ルーメン364からマーカ320を送達する押出部材366を具える。図に示すように、シャフト362の遠位端362bは、斜めになる及び/又はとがっており、シャフト362を組織を通って直接導入することができる。代替的に、送達デバイス360は、例えば、本明細書に記載されているような、組織を通って配置されているカニューレ、シース、あるいはその他の筒状部材(図示せず)を通して導入するようにしても良い。選択的に、遠位端362bは、例えば、放射線不透過性、音波を発生する材料、あるいはその他の材料でできた、バンド又はその他の構造を具えていても良く、これによって、本明細書に記載されているように、導入中に、例えば、やはり本明細書に記載されているような、X線又は超音波撮像を用いて、遠位端362bを容易にモニタすることができる。
【0110】
図30B及び31Bに示すように、押出部材366は、例えば、図30Bに示すように、ルーメン364内の最初はマーカ320近傍に配置された、遠位端367を具えている。押出部材366は、送達デバイス360のハンドル370に対してほぼ固定されており、一方、シャフト362は、以下に更に述べるように、例えば、マーカ320を露出させるために、後退させることができる。例えば、図30Bに示すように、押し出し部材366の近位端366aは、ハンドル370内に装填されている押出ホルダ372に固定することができる。
【0111】
シャフト362は、シャフトホルダ374に連結されており、このホルダはハンドル370内で摺動可能である。例えば、シャフトホルダ374は、図30Bに示す、第1の位置又は遠位位置から、図31Bに示す第2の位置又は近位位置へ、軸方向に摺動可能である。従って、第1の位置にあるシャフトホルダ374で、押出部材366の遠位端367がシャフト362の遠位端362bから近位側へずれて、これによって、図30Bに示すように、シャフトルーメン364内にマーカ320を受けるのに十分なスペースを提供している。シャフトホルダ374が第2の位置に向けられると、図31Bに示すように、シャフト362が、シャフト362の遠位端362bが、押出部材366の遠位端367近傍に配置されるまで後退する。押出部材366の遠位端367は、このシャフト362の後退の間にマーカ320が近位に移動しないようにして、図33及び33Aに示すように、マーカ320がシャフト362のルーメン364から連続的に展開するようにする。
【0112】
シャフトホルダ372及びシャフト362は、第2の位置にバイアスされているが、選択的に、第1の位置に残して、例えば、送達デバイス360を用いてマーカ320をそこに装填して送達するようにしても良い。例えば、図30B及び31Bに示すように、ハンドル370は、ハウジング内の溝378で受けて、シャフトホルダ374に隣接しているばねあるいはその他の機構を具えていても良い。第1の位置では、ばね376は、図30Bに示すように圧縮されており、第2の位置では、ばね376は、図31Bに示すように弛緩しているか、あるいは、位置エネルギィが低い状態にある。
【0113】
ハンドル370は、第1の位置においてシャフトホルダ374とシャフト362を選択的に保持し、開放するアクチュエータを具える。例えば、図30Bに示すように、第1の位置にあるシャフトホルダ374で、シャフトホルダ374の近位端374aが押出ホルダ372の遠位端372aに隣接するか、これと係合するまで、シャフトホルダ374がハンドル370内で回転する。代替的に、ハンドル370は、シャフトホルダ374に第1の位置で選択的に係合する一又はそれ以上のその他の構造(図示せず)を具えていても良い。図31Bに示すように、シャフトホルダ374がハンドル370内で回転して、押出ホルダ372の遠位端372aから近位端374aの係合が解かれると、近位端372aは、ハンドル370内を近位側に自在に移動することができる。このように、シャフトホルダ374が回転すると、ばね376が自動的にシャフトホルダ374を近位側に向け、これによって、マーカ320が展開する。前進位置においてシャフト362を開放可能に固定し、アクチュエータが作動するときにシャフト362を自動的に後退させる、たとえば、開放可能な戻り止め又はロック、といったその他のアクチュエータを、ハンドル370及び/又はシャフトホルダ374に設けることは、自明である。
【0114】
図32及び33を参照すると、上述の実施例と同様に、送達デバイス360を用いて、例えば、一又はそれ以上の病変部142を含むターゲット組織領域内の、胸部40又はその他の組織構造内へマーカ320を送達することができる。マーカ320が送達されると、例えば、本明細書に記載のいずれかのシステム及び方法で、マーカ320を用いてターゲット組織領域を位置決めすることができる。
【0115】
図35を参照すると、マーカデバイス610の更に別の実施例が示されており、これは、テザー又はその他の細長いエレメント630に連結されたマーカ620を具える。テザー630は、例えば、生体吸収性材料あるいは非生体吸収性材料で形成した縫合糸、例えば、柔軟な材料、硬質材料、あるいは可鍛性材料で形成したワイヤ、その他であってもよく、マーカがターゲット組織領域へ導入されるときに、患者の身体を伸ばすのに十分な長さを有している。マーカ620は、図34A及び34Bに示すマーカ320’’’あるいは本明細書に記載されているその他の実施例と同様であり、例えば本明細書に記載の位置決めワイヤと同様に、テザー630の遠位端634に開放可能に、あるいは実質的に永久的に取り付けることができる。マーカ620から延在する細長いテザー630は、組織内にインプラントする時、マーカ620の位置の追加の基準を提供する。例えば、テザー630は、腫瘍除去手術を行う間に、外科医をマーカ620の正しい位置にガイドして、及び/又は、除去した腫瘍体積内のマーカ620の存在を解析する。テザー630はまた、ターゲット組織内のマーカ620の方向を同定する助けとなるタグを配置するのに使用することができ、所望であれば、適所に残す、あるいは除去してしまっても良い。
【0116】
図36乃至41を参照すると、例えば、胸部41内の触診不可能な病変部142内にマーカ620をインプラントするなど、ターゲット組織領域内にマーカデバイス610をインプラントするための送達デバイス660と方法が示されている。上述の実施例と同様に、送達デバイス660は、例えば胸部41などのターゲット組織領域へ組織を通って導入するサイズの近位端262aと遠位端262bを有し、マーカデバイス610を担持するシャフト262を具える。送達デバイス660は、シャフト662の近位端662aと遠位端662bの間に少なくとも部分的に延在するルーメン664と、シャフト662内でルーメン664からマーカ620を送達するために摺動可能である押出部材666を具える。図に示すように、シャフト662の遠位端662bは斜めになる、及び/又はとがっており、シャフト662が組織を通って直接導入されるようになっている。代替的に、送達デバイス660は、例えば、本明細書に記載されているような、組織を通って配置されているカニューレ、シース、あるいはその他の筒状部材(図示せず)を通して導入するようにしても良い。選択的に、遠位端662bは、例えば、放射線不透過性、音波を発生する材料、あるいはその他の材料でできた、バンド又はその他の構造を具えていても良く、これによって、導入中に、やはり本明細書に記載されているように、遠位端662bを容易にモニタすることができる。
【0117】
図36に示すように、押出部材666は、それを通ってテザー630を摺動可能に受けるルーメン667を具える。従って、製造中又は使用前には、マーカデバイス610を送達デバイス660に装填して、マーカ620がルーメン664内で遠位端662b近傍に配置され、テザー630が押出部材666のルーメン667を通って延在し、押出部材666に連結されているプランジャ668から出るようになっている。マーカ620が、らせんあるいはその他の形状のバイアスされている場合、マーカ620は、図36に示すようにシャフト662に装填する際に真っ直ぐにすることができる。マーカデバイス610は、腫瘍摘出手術の前に、あるいは、生検を行う時にインプラントしてワイヤ位置決め手順を置き換えることができる。代替的に、マーカデバイス610は、コアニードル生検機器又は真空コアニードルシステム(図示せず)を介して送達することができる。
【0118】
例えば、図36に示すように、手術中に、遠位端662bを例えば病変部142などのターゲット組織領域内へ組織を介して挿入することができる。送達デバイス660の遠位端662bを組織内の所望の位置に前進させると、シャフト662は、図37に示すように、押出部材666に連結されたプランジャ668に対してルーメン664から後退して、マーカ620を送達する。図に示すように、マーカ620は、展開すると自動的に及び/又は弾性的に形状が変わり、図37に示すテーパの付いたらせん形状に戻る。図38を参照すると、送達デバイス660が患者の身体から取り出されて、例えば病変部142などのターゲット組織領域内にマーカ620を残す。テザー630は、例えば、図39に示すように、端部が胸部41から露出されるまで押出部材666を通って単純にスライドする。
【0119】
選択的に、図40に示すように、テザー630をマーカ620から切り離して、マーカ620を病変部142内の適所に置くことができる。例えば、テザー630は、マーカ620のすぐ隣に、所定の張力を与えると破壊されるぜい弱領域(図示せず)を具えていても良い。代替的に、テザー630は、マーカ620から切り離すことができるネジ山の付いた遠位端634あるいはその他のコネクタを具え、例えば、テザー630を回転させて遠位端634のねじを緩めてマーカ620から外すことができる。代替的に、テザー630は、次の腫瘍手術あるいはその他の手順を行う間、マーカ620に付けたままでも良い。
【0120】
図42を参照すると、マーカデバイス610’の別の例示的実施例が示されており、これは、マーカデバイス610と概ね同じである。すなわち、テザー630とマーカ620’を具える。しかしながら、マーカ620’は、図41A及び41Bに示すマーカ320’’’’と同じであっても良い。図43乃至46は、送達デバイス620’と、マーカデバイス610’をインプラントする方法の例示的実施例を示す図であり、これらは図36乃至40に記載のものと概ね同じである。
【0121】
本明細書に記載のシステム及び方法は、胸部の病変に関するものであるが、一又はそれ以上のマーカ又はターゲットを患者の身体のその他の領域にインプラントあるいは導入して、上述のプローブ30のようなプローブを用いて続いて位置決めを行うことができる。例えば、一又はそれ以上のターゲットを、続いて位置決めを行う、胆管、大腿動脈又は静脈、卵管、あるいはその他の身体ルーメン内あるいは近傍に配置することができる。このターゲットは、カテーテル、ワイヤ、あるいはその他の送達デバイスによって、アクセス部位から身体ルーメンのルーメン内に運び、例えば、カテーテル又はワイヤを固定することによって、あるいはマーカを身体ルーメンの壁又は身体ルーメン内にアンカで止めることによって、そこに固定することができる。
【0122】
例えば、図47は、一又はそれ以上の診断及び/又は治療を実行する患者の胃腸管3を示している。図に示すように、マーカ2を担持しているカテーテル1を、例えば、口又は直腸を介して患者のGI管3に導入することができる。図48に見られるように、カテーテル1は、例えば、本明細書に記載したその他のマーカと同様の、マーカ2を具えている。例えば、マーカ2は図23A乃至23Cに示し、上述した一又はそれ以上のビーズ320と同様の構造を具えている。カテーテル1及びマーカ2は、例えば、蛍光透視法、超音波あるいはその他の外部撮像を用いて、GI管3内の所望の位置に進めることができる。
【0123】
次いで、本明細書に記載したプローブのようなプローブを用いてマーカ2を位置決めし、これによって、GI管3内の位置を決める。その他の身体ルーメンを同様に位置決めして、例えば、患者の身体の外から最小侵襲法で、身体ルーメンへのアクセスを容易にすることは自明である。例えば、図49に示すように、マーカ2を用いてGI管3内の特定の位置を位置決めして、身体ルーメンの壁の穿刺を容易にして身体ルーメンをその中に入れて、身体ルーメンをクリップしたり、切断したり、結紮したり、閉じたり、などを行う。図49は、例えば、従来の腹腔鏡手術で、息を吸い込んだ腹部4を示す断面図である。本明細書に記載のプローブと同様のプローブ5を、アクセスカニューレ6に挿入して、カテーテル1上のマーカ2の位置をスキャンする及び/又は検出することができる。次いで、腹腔鏡7を用いて、マーカ2に対するプローブ5の位置を視覚化する。マーカ2を位置決めしたら、アクセスシース8を用いて、所望の位置にあるGI管3へのアクセスを進めて、例えば一又はそれ以上の診断及び/又は治療手順を実行する。所望の通り、アクセスが完了したら、あるいはこの手順が完了した後、マーカ2とカテーテル1を取り出す。
【0124】
例示的な実施例では、カテーテルを用いてマーカを卵管に導入し、次いで針又はその他のデバイスを最小侵襲法で導入し、例えばマーカの上の患者の皮膚と組織を通って穿刺を行い、卵管にアクセスして、例えば、卵管を結紮する、焼灼する、あるいは切る又は閉じる。代替的に、マーカが胆管に配置されると、プローブ30の案内により内視鏡アクセスを用いて胆管にアクセスして、例えば、患者の腸内で手術を行う。更なる代替では、マーカを、摘出の目的である長さの大腿動脈、あるいはその他の静脈、と連通する枝部に配置して、プローブ30を用いて、血管の外の各枝部を特定し、例えば、各枝部を切る、結紮する、焼灼する、及び/又は、分離して、この長さの血管を隣接する血管から分離して摘出することができる。
【0125】
更なる代替例では、一又はそれ以上のマーカをターゲット組織構造内にインプラントして、本明細書に述べたシステムを用いて治療の位置決めを行うことができる。例えば、マーカは、インプラントされているターゲット組織領域内あるいはその周囲に、延長した時間を超えて放出される一又はそれ以上の薬剤、放射性材料、あるいはその他の治療用物質を担持することができる。十分な時間が経過した後、例えば、治療用物質がほぼ完全になくなった、あるいは十分に送達された後、プローブ30を用いてマーカを位置決めし、例えば、最小侵襲法で、マーカを容易に再生する、及び/又は取り除くようにする。
【0126】
本発明は、様々な変形及び代替が可能であり、特別な例を図面にして、詳細を個々に述べている。しかし、本発明は、個々に開示した特定の形あるいは方法に限定されるものではなく、逆に、特許請求の範囲に入るすべての変形例、均等物、及び代替例をカバーしていると解されるべきである。
【技術分野】
【0001】
本発明は、一般的に、外科的処置を行う装置及び方法に関し、特に、患者の身体内のターゲット、マーカ、病変、及び/又はその他の身体構造を、例えば、腫瘍摘出手術などの外科的処置あるいはその他の処置を行う間に、位置決めする装置及び方法に関する。
【背景技術】
【0002】
生体検査、又は腫瘍摘出手術などの胸部内の病変を除去する外科的処置を行う前に、その病変の位置を特定しなければならない。例えば、処置を行う前に病変の位置を位置決め及び/又は確認するにはマンモグラフィや超音波撮像を用いることができる。その結果得られた画像は、外科医が病変の位置を特定し、例えば、その病変にアクセスするための切開を行う間及び/又はその病変を除去するのに、外科医を案内する処置を行う間に、外科医によって使用される。しかし、このような画像は、通常二次元画像であり、その胸部と除去すべき病変は三次元構造体であるため、病変を位置決めするのに限られたガイダンスを提供するのみである。更に、このような画像は、病変周囲に適切なマージンを決めるにあたって、すなわち、除去すべき所望の標本体積を決定するに際して、限られたガイダンスを提供するのみである。
【0003】
位置決めを容易にするためには、処置の直前に、例えば針を用いて胸部にワイヤを挿入し、ワイヤの先端が病変位置に来るようにすることができる。ワイヤが配置されると、例えば、胸部からワイヤが出てくる患者の皮膚に絆創膏やテープを貼って、ワイヤを適所に固定することができる。適所に配置して固定したワイヤを用いて、患者は、例えば、生体検査や腫瘍摘出手術を行うための外科的処置を行うことができる。
【0004】
位置決めにワイヤを用いることの一つの問題は、配置した時と外科的処置を行う間にワイヤが移動することがある点である。例えば、ワイヤが十分に固定されていないと、病変にアクセスするのに用いた経路に対してワイヤが動いてしまい、その結果、先端が病変の位置を間違って表示することがある。この問題が生じると、その位置にアクセスして、組織を取り除くときに、病変が完全に除去されないことがあり、及び/又は、健康な組織が不必要に除去されてしまうことがある。更に、この手順の間に、外科医は、例えばマンモグラフィやワイヤを配置する間に取得したその他の画像に基づいてワイヤの先端と病変の位置を推測するのみであり、それ以上のガイダンスなしで切除を行うことになる。更に、このような画像は二次元画像であるので、処置を行うあるいは除去する病変を特定するのに限られたガイダンスを提供することになる。
【0005】
代替的に、放射性シードを配置して、処置を行う間に位置決めを行うことが提言されている。例えば、胸部を通って病変へ針を導入して、針からシードを展開させることができる。この針は引き抜いて、シードの位置をマンモグラフィを用いて確認することができる。一連の外科的処置を行う間に、携帯型ガンマプローブを胸部の上に配置して、シード上の位置を認識し、切開を行って、プローブを用いてシードと病変の切除を案内することができる。
【0006】
シードは、すぐに除去される針を通って送達されるので、配置と外科的処置を行う間にシードが患者の身体内で移動するというリスクがある。従って、位置決めワイヤを使用する場合と同様に、シードが正確に病変の位置を認識しないことがあり、特に、一旦配置したシードを外から安定させる方法はない。更に、このようなガンマプローブは、シードの位置を決めるに際して、例えば三次元で所望の正確さを提供することができず、従って、病変の特定に限られたガイダンスを提供できるのみである。
【0007】
従って、外科的処置、診断、あるいはその他の医療処置を行う前、及び/又はその間に、病変又はその他の組織構造の位置決めを行う装置及び方法が有益である。
【発明の概要】
【0008】
本発明は、外科的処置あるいはその他の医療処置を行う装置及び方法に関する。特に、本発明は、インプラント可能なマーカ、及び患者の身体内のターゲット、マーカ、病変、及び/又はその他の身体構造を、例えば、腫瘍摘出手術などの外科的処置あるいはその他の処置を行う前又は間に、位置決めする装置及び方法に関する。
【0009】
一実施例によれば、一又はそれ以上のマーカ又はターゲットを含む患者の身体内のターゲット組織領域を位置決めするシステムと;ターゲット組織領域にターゲットが導入され、ターゲット組織領域近傍及び/又はターゲット組織領域に向けてプローブを配置した後に、ターゲットを検出する電磁信号を送受信するプローブが提供されている。プローブは、例えば、ディスプレイ、スピーカ、などの一又はそれ以上の出力デバイスを具えており、例えば、プローブとターゲット間の距離及び/又は角度方向といった、プローブに対するターゲットの空間的感覚に基づいた空間的情報を提供する。選択的に、このシステムは、例えば、中に一又はそれ以上のターゲットを装填することができる、針、カニューレ、又はその他の筒状部材など、ターゲットを組織、あるいは患者の身体内へ導入する一又はそれ以上の送達デバイスを具えていても良い。
【0010】
例示的な実施例では、ターゲットは、複数の傾斜面を具えていても良く、これがプローブからの電磁信号の反射を強化することができる。例えば、ターゲットが受動マーカを提供するといったことである。例えば、ターゲットは、コアエレメントに連結された複数のビーズを具える細長いマーカであっても良く、このビーズが傾斜面及び/又はエッジを具えており、プローブによる検出を強化している。コアエレメントは、例えば、波形、テーパーの付いたらせん、筒状らせん、などの一又はそれ以上のあらかじめ決められた形状に基づいていてもよく、更に、例えば、マーカの送達デバイスへの装填を容易にするために、真っ直ぐなるのに十分に弾性があるものでも良い。別の実施例では、ターゲットは、球形、楕円形、ディスク状、又はその他の形状をしていても良く、例えば、電磁信号の反射を強化する一又はそれ以上の表面特性を持っていても良い。
【0011】
選択的に、ターゲットは、プローブからの入射信号を変調してターゲットの位置決めを容易にする一又はそれ以上の回路、機構、などを具えていても良い。例えば、ターゲットが能動反射マーカを提供するなどである。例えば、ターゲットは、ターゲットに当たるプローブからの信号に位相シフトを与え、例えば、そのターゲットを、その他のターゲット、組織構造などから区別する。別の選択では、ターゲットは、回路と電源を具えており、ターゲットがプローブからの信号の検出に応答して、所定の信号を生成するようにする、すなわち、能動応答マーカを提供する。
【0012】
選択的に、ターゲットは、細長いフレキシブルテザーに開放可能にあるいはほぼ永久的に連結されたマーカを具えていても良い。代替的に、ターゲットは、シャフトと、当該シャフトの遠位端にマーカを具える位置決めワイヤを具えていても良い。
【0013】
別の実施例によれば、患者の身体内のターゲット組織領域を位置決めするシステムが提供されており、このシステムは、ターゲット組織領域内あるいはこの周変にインプラントするサイズの一又はそれ以上のマーカ又はターゲットを担持する送達デバイスと;プローブがターゲット組織領域近傍及び/又はターゲット組織領域に向けて配置された際に、ターゲット組織領域内あるいはその周辺にインプラントした一又はそれ以上のマーカを検出する電磁信号を送受信するプローブと;を具える。
【0014】
例示的実施例では、この送達デバイスは、近位端と、患者の身体内の組織を通ってターゲット組織領域へ導入するサイズの遠位端を具えるシャフトと、この遠位端から送達可能な一又はそれ以上のマーカとを具える。例えば、シャフトは、ルーメンを具えており、複数のマーカは、このルーメン内を搬送されて、マーカがシャフトから順次送達され、病変あるいはその他のターゲット組織領域内あるいはその周辺の位置にインプラントされる。この送達デバイスで送達することができる例示的なマーカには、受動マーカ、能動反射マーカ、及び能動応答マーカが含まれる。
【0015】
更に別の実施例によれば、患者の身体内のターゲット組織領域を位置決めする方法が提供されており、この方法は、マーカ又はその他のターゲットを組織を通ってターゲット組織領域へ導入するステップと;プローブを、患者の皮膚又はターゲット組織領域近傍に対して及び/又はターゲット組織領域に向けて配置するステップと;プローブを作動させて、プローブがターゲット組織領域に向けて電磁信号を送信し、ターゲットから反射された電子信号を受信し、ターゲットとプローブとの間の空間的関係を提供する空間情報を、表示、送出、又は提供するステップと;を具える。
【0016】
一実施例では、ターゲットは組織を通ってターゲット組織領域へ導入された位置決めワイヤであっても良く、この位置決めワイヤがターゲットを搬送する。別の実施例では、ターゲットはターゲット組織領域内にインプラントされた一又はそれ以上のマーカであっても良い。更に別の実施例では、ターゲットはカテーテル又は、例えば、ターゲット領域に導入することができ、展開して体積又はその領域を描出することができるその他のデバイスであっても良い。このデバイスは、例えば電磁波プローブを用いて、その体積を認識及び/又は規定するように構成された特別な構造を具えていても良い。選択的に、このターゲットは、診断、治療、及び/又は外科的処置を行う前、又は行っている間に、例えば、定位性、超音波、又は電磁波ベースの撮像装置を用いて、配置しても良い。
【0017】
例示的な実施例では、ターゲット組織領域は、病変を有する患者の胸部内の領域を具えていても良く、ターゲットが当該病変内又は周囲に送達される。代替的に、ターゲット組織領域は、例えば、腸、卵管などの中又は周辺といった身体のその他の領域に位置するものでも良い。例えば、ターゲットは、病変から離れたところにあるターゲット組織領域に導入して、ターゲット組織領域から検体体積除去用の所望のマージンを規定する第1のマーカを具えていても良い。選択的に、第2のマーカ及び/又は複数の追加のマーカを病変と第1のマーカから離れたところにあるターゲット組織領域に導入して、更に所望のマージンを規定するようにしても良い。このように、所望であれば、三次元アレイマーカを、ターゲット組織領域内あるいはその周囲に配置して、その位置決めを容易にすることもできる。組織検体は、次いでターゲット組織領域から除去することができる。この検体は、病変とターゲットを含む。
【0018】
更に別の実施例によれば、患者の胸部のターゲット組織領域内の病変を除去する方法が提供されており、この方法は、胸部組織を通ってターゲット組織領域へターゲットを導入するステップと;例えば、通常ターゲット組織領域に向けて、患者の皮膚近傍に、ターゲット組織領域に向けて電磁信号を送信し、ターゲットから反射された電磁信号を受信し、ターゲットとプローブ間の空間的関係を提供する空間情報を提供するプローブを配置するステップと;ターゲット組織領域から、病変とターゲットを含む組織検体を除去するステップと;を具える。
【0019】
更に別の実施例によれば、患者の胸部のターゲット組織領域内の病変を除去する方法が提供されており、この方法は、胸部組織を通ってターゲット組織領域へターゲットを導入するステップと;例えば、ターゲット組織領域に向けて、患者の皮膚近傍に、ターゲット組織領域に向けて電磁信号を送信し、ターゲットから反射された電磁信号を受信するプローブを配置するステップと;このプローブを用いて、病変周囲のターゲット組織領域内に所望のマージンを規定するステップと;所望のマージンによって規定され、病変とターゲットを含む組織検体をターゲット組織領域から除去するステップと;を具える。
【0020】
更に別の実施例によれば、患者の身体内のターゲット組織領域を位置決めするインプラント可能なマーカが提供されており、このマーカは細長いコア部材と、このコア部材に担持される複数のビーズを具える。選択的に、このビーズは、複数の表面及び/又はエッジを具えており、電磁信号の反射を強化してマーカの位置決めを容易にする。これに加えて、あるいは代替的に、マーカは、例えばビーズの一つに又はコア部材に埋め込まれたあるいはこれに担持された電子回路を具えていても良く、これによって能動反射と能動応答の一つを提供することができる。
【0021】
本発明のその他の態様及び特徴は、図面を参照して、以下の記載を考慮することで明らかになる。
【図面の簡単な説明】
【0022】
【図1】図1は、位置決めワイヤとプローブを有する、身体内のターゲット組織領域を位置決めするシステムの一実施例を示す正面図である。
【図2】図2Aは、患者の身体胴体部の正面図であり、例えば腫瘍又はその他の病変など、胸部内のターゲット組織領域に挿入されている図1に示す位置決めワイヤを示す。図2Bは、図2Aの2B−2B線に沿った胸部の断面図であり、ターゲット組織領域内に配置した位置決めワイヤ上のターゲットを示す。
【図3】図3は、図2A及び2Bに示す胸部の断面図であり、例えば、皮膚から病変までの距離、所望のマージン、及び/又は、胸部から除去する検体のサイズを測る、切開部位置決めワイヤのターゲットまでの第1の距離の測定に使用されている、図1のプローブを示す。
【図4】図4は、最初の切除が行われた後の図2A、2B、及び3に示す胸部の断面図であり、例えば、除去する検体の所望するマージンに十分に届くように組織が切除されたかどうかを決定するために、第2の距離測定を行うのに使用されているプローブを示す。
【図5】図5は、図2A及び2Bの胸部から取った切除組織検体の断面図であり、例えば、病変の周りに所望のマージンが達成されていることを確認するために、第3の距離測定を行うのに使用しているプローブを示す。
【図6】図6は、胸部の斜視図であり、胸部内の、例えば触知できない病変など、一又はそれ以上の病変周囲に複数のマーカを送達するのに使用されている送達デバイスを示す。
【図7】図7は、図6に示す胸部の断面図であり、病変周囲に配置した複数のマーカを示す。
【図8】図8は、図6及び7に示した胸部の断面図であり、例えば、一又はそれ以上のマーカへの距離を測るために、第1の距離測定セットを取り入れて使用されているプローブを示す。
【図9】図9は、図6乃至8に示した胸部の断面図であり、例えば、当該胸部から除去すべき検体周囲の所望のマージンを規定するために、マーカに至るまでの切開を容易にするべく使用されているプローブを示す。
【図10】図10は、マーカ位置決め用の様々なシステムに含めることができるプローブの例示的実施例を示す概略図である。図10Aは、図10に示すプローブ機器のような、プローブ上に設けることができる例示的なディスプレイ出力を示す図である。図10Bは、図10に示すプローブ中に設けることができるアンテナの断面図である。
【図11】図11は、身体内のターゲット組織領域を特定するシステムの別の例示的実施例を示す図であり、このシステムは、胸部にインプラントしたマーカ、当該マーカを位置決めするハンドヘルドのプローブと当該プローブに接続されているコントローラを有するプローブ機器を具える。
【図12】図12は、病変を含む胸部からの組織検体の除去を容易にする、マーカの位置決めに使用されている図11に示すシステムの側面図である。
【図13】図13は、病変を含む胸部からの組織検体の除去を容易にする、マーカの位置決めに使用されている図11に示すシステムの側面図である。
【図14】図14は、病変を含む胸部からの組織検体の除去を容易にする、マーカの位置決めに使用されている図11に示すシステムの側面図である。図14Aは、図14の詳細を示す図であり、マーカを位置決めするのに使用されているプローブを示し、これによって胸部から除去している組織検体の所望のマージンを特定する。
【図15】図15は、病変を含む胸部からの組織検体の除去を容易にする、マーカの位置決めに使用されている図11に示すシステムの側面図である。図15Aは、図15の詳細を示す図であり、マーカを位置決めするのに使用されているプローブを示し、これによって除去した組織検体の所望のマージンが達成されたことを確認する。
【図16】図16Aは、プローブと一体になった指サックと、プローブに接続されたコントローラを含むプローブ機器の別の例示的実施例を示す斜視図である。図16Bは、図16Aに示す指サックの詳細を示す側面図であり、指がその中に入っている状態を示す。
【図17】図17は、病変近傍にインプラントされており、胸部組織を切除して病変を含む組織検体を除去する間に、図16A及び16Bに示すプローブ機器を用いて特定されたマーカを示す、胸部の断面図である。
【図18】図18は、病変近傍にインプラントされており、胸部組織を切除して病変を含む組織検体を除去する間に、図16A及び16Bに示すプローブ機器を用いて特定されたマーカを示す、胸部の断面図である。
【図19】図19は、プローブを担持するカニューレと当該プローブに接続されたコントローラを具えるプローブ機器の更に別の例示的実施例を示す側面図である。図19Aは、中にプローブを有する図19に示すカニューレの先のとがった先端部の詳細を示す図である。
【図20】図20は、病変の近傍にインプラントされたマーカを有する胸部の断面図であり、胸部にカニューレを配置して病変部位にアクセスを提供する方法を示す。
【図21】図21は、病変の近傍にインプラントされたマーカを有する胸部の断面図であり、胸部にカニューレを配置して病変部位にアクセスを提供する方法を示す。
【図22】図22は、病変の近傍にインプラントされたマーカを有する胸部の断面図であり、胸部にカニューレを配置して病変部位にアクセスを提供する方法を示す。
【図23】図23Aは、組織にインプラントして、プローブを用いて特定できる細長いマーカの第1の例示的実施例の側面図である。図23Bは、図23Aのマーカの23B−23Bラインに沿った断面図である。図23Cは、図23Aのマーカの端面図である。図23Dは、展開した形状において波形を有する、図23A乃至23Cのマーカを示す側面図である。
【図24】図24A乃至24Cは、図23A乃至23Dのマーカなど、インプラント可能なマーカの製作に使用できるビーズの、それぞれ、斜視図、端面図及び側面図である。
【図25】図25Aは、組織内にインプラントしてプローブを用いて特定できる細長いマーカの代替実施例を示す側面図である。図25Bは、図24Aのマーカの詳細を示す図であり、マーカの表面に組み入れた特徴部分を示す。
【図26】図26A乃至26Cは、組織内にインプラントしてプローブを用いて特定できるらせん形状を有する細長いマーカの別の代替実施例を示す、それぞれ、側面図、斜視図及び端面図である。
【図27】図27A乃至27Cは、組織内にインプラントしてプローブを用いて特定できる球形マーカの例示的実施例を示す、それぞれ、斜視図、端面図及び側面図である。
【図28】図28A乃至28Cは、組織内にインプラントしてプローブを用いて特定できる球形マーカの代替実施例を示す斜視図である。
【図29】図29A及び29Bは、図25のマーカを胸部に送達するのに使用される送達カニューレの例示的実施例を示す側面図である。
【図30】図30Aは、マーカを送達する送達カニューレの別の例示的実施例を示す側面図である。図30Bは、図30Aの送達カニューレの30B−30B線に沿った断面図である。
【図31】図31Aは、マーカを送達した後の図30A及び30Bの送達カニューレの側面図である。図31Bは、図31Aの送達カニューレの31B−31B線に沿った断面図である。
【図32】図32は、胸部の断面図であり、図30A乃至31Bの送達カニューレを用いて胸部に図25のマーカをインプラントする方法を示す。図32Aは、図32に示す胸部にインプラントされているマーカの詳細を示す図である。
【図33】図33は、胸部の断面図であり、図30A乃至31Bの送達カニューレを用いて胸部に図25のマーカをインプラントする方法を示す。図33Aは、図33に示す胸部にインプラントされているマーカの詳細を示す図である。
【図34】図34A及び34Bは、組織内のインプラント用マーカの更に別の実施例を示す、それぞれ、側面図及び端面図である。
【図35】図35は、細長いテザーに連結された図34A及び34Bに示すマーカを具えるマーカ装置の代替実施例の側面図である。
【図36】図36は、図35のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図37】図37は、図35のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図38】図38は、図35のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図39】図39は、図35のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図40】図40は、図35のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図41】図41A及び41Bは、組織内へのインプラント用マーカの更なる別の例示的実施例を示す、側面図と端面図である。
【図42】図42は、細長いテザーに連結した図36A及び36Bのマーカを具えるマーカ装置の代替実施例を示す側面図である。
【図43】図43は、図42のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図44】図44は、図42のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図45】図45は、図42のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図46】図46は、図42のマーカを送達する送達装置を示すと共に、一又はそれ以上の病変近傍にマーカをインプラントするべく胸部へ送達装置を導入する方法を示す、胸部の断面図である。
【図47】図47は、患者の消化管システムに導入されているマーカを示す患者の身体の断面図である。
【図48】図48は、図47に示す患者の身体に導入できるマーカの詳細を示す図である。
【図49】図49は、図47の患者の身体の詳細を示す図であり、ある手順を実行するために、少なくとも部分的に患者の消化管システムへ導入したマーカの位置に基づいて、患者の身体内に導入されている機器を示す。
【図50】図50Aは、マーカに入射しマーカから反射してきたプローブからの信号を示す概略図であり、図50Bは、入射信号と反射信号の間の位相シフトを示す図である。
【発明を実施するための形態】
【0023】
図1は、胸部、あるいは身体内のその他の位置にある、腫瘍、病変、あるいはその他の組織構造といった患者の身体内のターゲット組織領域を位置決めするシステム10の一実施例を示す。システム10は、一般的に、マーカ装置又は位置決めワイヤ20と、電磁パルス、電磁波、あるいはレーダーなどのその他の信号を用いて位置決めワイヤ20の少なくとも一部を検出するプローブ30を具える。位置決めワイヤ20は、近位端22aと、遠位端22bと、遠位端22bの上のターゲット26を具える細長部材又はシャフト22を具える。選択的に、システム10は、位置決めワイヤ20に加えて一又はそれ以上の追加の位置決めワイヤ及び/又はターゲット(図示せず)を具えていても良い。
【0024】
シャフト22は、硬質ロッド、中空筒状ボディなど、位置決めワイヤ20を組織を通して経皮的に容易に導入できる十分なコラム強度を有する比較的硬い材料で形成することができる。シャフト22は、例えば、約0.5乃至10cmといった、患者の身体の外側位置から組織を通ってターゲット組織領域へ延在するのに十分な長さを有する。選択的に、シャフト22は所望の場合に曲げることができる、あるいは所望の形状に形成することができるように、適応性があるあるいは塑性的に変形可能であっても良い。
【0025】
ターゲット26は、シャフト22の遠位端22bに、プローブ30を用いて遠位端22bの位置決めを容易にする一又はそれ以上の特徴を具えていても良い。図に示す例示的な実施例では、ターゲット26は、例えば約0.5乃至5mmであり、例えばシャフト22の遠位端22bより直径が大きい球形といった、球状構造であっても良い。選択的に、ターゲット26は、電磁気信号の受信及び反射を強化する一又はそれ以上の特徴を具えていても良い。例えば、ターゲット26は、一又はそれ以上の材料から形成することができ、及び/又は、例えば、本明細書に記載したマーカと同様に、レーダー検出を強化する表面仕上げを有していても良い。代替の実施例では、例えば、立方体、三角形、らせん、などの、その他の形状及び/又はジオメトリが提供されており、これらは、本明細書に記載したその他の実施例と同様に、レーダーの反射及び/又は検出を強化することができる一又はそれ以上のコーナー及び/又はエッジを具える。
【0026】
これに加えて、あるいは代替的に、ターゲット26は、例えば、病変部42の周りに所望のマージンを容易に位置決めするために、病変部42のサイズ及び/又は形状に近いサイズ及び/又は形状を有していても良い。例えば、病変部42のサイズ及び/又は形状は事前に測定することができ、ターゲット26は、サイズ及び形状が異なるターゲットセットから選択して、シャフト22に固定することができる(又は、各ターゲットにそれぞれシャフトを設けるようにしても良い)。これに加えて、あるいは代替的に、複数の位置決めワイヤ及び/又はターゲットが提供されている場合は、例えば、プローブ30を用いてターゲットを互いに容易に区別するように、各ターゲットの形状及び/又は特徴は異なっていても良い。
【0027】
一実施例では、シャフト22とターゲット26を、同じ材料で一体的に形成することができる。代替的に、ターゲット26は、シャフト22と異なる材料で形成するようにしても良く、ターゲット26は、接着剤による接着、溶接、半田付け、締り嵌め、ねじ、あるいはその他の協動するコネクタ、などによって遠位端22bに固定しても良い。このように、この代替例では、ターゲット26を、シャフト22に対するレーダーによる検出を強化する材料で形成することができる。
【0028】
選択的に、複数のターゲットをインプラントする場合は、各ターゲットが、一又はそれ以上のその他のターゲットに対して特定のターゲットを区別することができる、表面、形状、及び/又は追加の材料の特徴を有していても良い。例えば、各ターゲットは、そのターゲットに特異的な特定の電磁信号を吸収するあるいは反射するものであっても良く、当該ターゲットを独自に特定するのに使用することができる。
【0029】
別の選択肢では、位置決めワイヤ20が一又はそれ以上のアンカ要素24を、例えばターゲット26近傍など、遠位端22b上に具えていても良いが、ターゲット26自体はアンカ要素24が不必要なほど十分に位置決めワイヤ20を安定化させることができる。図に示すように、アンカ要素24は、シャフト22から、例えば、ターゲット26から近位側に離れる方向に角度をつけるなど、逆方向に延在する複数のとげ24(2つ図示)を具えている。このように、とげ24は、位置決めワイヤ20が組織内に挿入された後に位置決めワイヤ20を適所に固定するように構成して、例えば位置決めワイヤ20を組織を通って遠位側に進める一方で、続いて生じる近位側へ引っ張られることを防止することができる。例えば、とげ24は十分にフレキシブルであり、とげ24がシャフト22に対してあるいはシャフト22近傍に圧縮されて、例えば、位置決めワイヤ20のプロファイルを最小にして、容易に前進させ、さらに、図に示すように横方向に外側に戻るように弾性的にバイアスすることができる。
【0030】
プローブ30は、例えば、マイクロパワーインパルスレーダー(MIR)プローブなど、電磁信号送受信能力を有するポータブル装置であっても良い。例えば、図1に示すように、プローブ30は、例えば患者の皮膚又は皮下組織など、組織に対してあるいは組織近傍に配置するよう意図した第1の端部30aと、例えばユーザが保持できる第2の反対側端部30bを有するハンドヘルド装置であっても良い。図10を更に参照すると、プローブ30は、一般的に、例えば送信アンテナ32と受信アンテナ34などの一又はそれ以上のアンテナと、一又はそれ以上のプロセッサ又はコントローラ36、及びディスプレイ38を具える。
【0031】
図10を参照すると、プロセッサ36は、一又はそれ以上のコントローラ、回路、信号生成器、ゲート、送信アンテナ32によって送信する信号の生成及び/又は受信アンテナ34によって受信した信号を処理するのに必要なその他のもの(図示せず)を具えていても良い。プロセッサ36の構成要素は、所望の、個別部品、固体素子、プログラム可能なデバイス、ソフトウエア構成要素、その他を具えていても良い。例えば、図に示すように、プローブ30は、例えばパルス発生器及び/又は疑似ノイズ発生器(図示せず)などの、送信アンテナ32に接続して送信信号を発生するインパルス発生器36bと、受信アンテナ34によって検出した信号を受信するインパルス受信器36cを具えていても良い。プロセッサ36は、マイクロコントローラ36aと、インパルス発生器36bとインパルス受信器36cを交互に作動させて電磁パルス、電磁波、あるいはその他の信号をアンテナ32を介して送信し、アンテナ34を介して反射された電磁信号を受信するレンジゲートコントロール36dを具えていても良い。使用することができる例示的な信号には、マイクロ波、例えば、超低帯域幅領域にあるマイクロインパルスレーダ信号などの無線波がある。
【0032】
例示的な実施例では、各アンテナ32、34は、例えば、角が付き出した物理的プロファイルを有するUWBアンテナ、ダイポールとパッチアンテナ、あるいはダイヤモンドダイポールアンテナなどの、共平面アンテナ、シングルエンド楕円アンテナ(SEA)、パッチアンテナ、その他であっても良い。代替的に、プロセッサ36は、個別のアンテナ32、34を提供する代わりに、単一のアンテナを送信アンテナと受信アンテナ(図示せず)として交互に作動させても良い。
【0033】
例えば、各アンテナ32、34は、Progress in Electromagnetics Research B,Vol.13,59−74(2009)で刊行された、“TEM Horn Antenna for Ultra−Wide Band Microwave Breast Imaging”に開示されているような、TEMホーンアンテナであっても良い。代替的に、各アンテナ32、34は、2008年3月20日公開の、米国特許公開公報第2008/0071169号に開示されたもの、及び、Microwaves,Antennas,& Propagation,IET,Volume 1,Issue 2(April 2007),pp.277−281で刊行されたNilavalanらの“Wideband Microstrip Patch Antenna Design for Breast Cancer Tumour Detection”にあるようなパッチアンテナであっても良い。パッチアンテナは、誘電材料が詰まったエンクロージャ(図示せず)に接続して、マイクロインパルスレーダーでの使用を容易にすることができる。
【0034】
別の代替実施例では、各アンテナが、例えば図10Bに示すような導波管ホーンであっても良い。図に示すように、アンテナ32’は、第1の端部32Bが閉じており、第2の端部32Cが開放しており、内部に導波管32Dが装着されているケース32Aを具える。ケース32Aの壁は、例えば、ベルギーのWesterlo所在の、Emerson & Cuming Microwave Products,N.V.社が販売しているEccosorb−FGM40などのブロードバンドシリコーン吸収材などの吸収材32Eで内張りしたものでも良い。ケース32Aの容積は、例えば、比誘電率が10の誘電体32Fで満たされていても良い。例示的実施例では、アンテナ32’は、例えば、幅約15×15mm、第1及び第2の端部32B−32C間の長さ約30mmの、約3乃至10ギガヘルツ(3−10Ghz)の超広域周波数帯(UWB)で動作するように構成された、正方形導波管ホーンであっても良い。開放端32Bは、内部にアンテナ32’が装着されているプローブから外側に向けられており、例えば開放端32Bが、アンテナ32’が本明細書に記載したような信号を送信及び/又は受信するように意図されている組織に接触又は連結されていても良い。
【0035】
インパルス受信器36cからの信号は、マイクロコントローラ36a用いて通信して更なる処理、表示、保存、通信、その他を行う前に、フィルタにかけるか、あるいは、例えば、リターン信号簡潔化(de−clutter)及び成形回路36eによって処理を行うようにしても良い。回路36eは、例えば、リターンエコーノイズや反射波などのアンテナ34からの信号を受信したり、その信号を例えばLPFを用いて簡潔化したりしてもよく、及び/又は、所望の通り、デジタル適応フィルタリング及び/又はパルス成形器を含むものでも良い。マイクロコントローラ36aは、次いで、以下に更に述べるように、受信した及び/又は処理した信号を読み取って、例えば、距離、角度、方向、などターゲット26の空間関係、あるいはプローブ30に対するその他の構造を認識することができる。プローブ30に含まれるプロセッサ及び/又はその他の構成要素の例示的実施例は、McEwanに付与された米国特許第5,573,012号と、第5,766,208号に開示されている。
【0036】
代替の実施例では、プローブ30は、McEwanに付与された米国特許第6,914,552号に開示されているような磁気レーダーシステムとして作動するように構成することができる。例えば、プローブ30は、発電機及び/又は電流コイルドライバ(図示せず)に接続された、例えば電磁石(図示せず)のような磁場励振源を具えていても良い。発電機及び/又は電流コイルドライバは、プローブ30内又は外部に設けることができる。例えば、このプローブは、マーカ又はその他のターゲットに磁場を誘発し、両極間にレーダーユニットが同定及び/又は認識できる特定周波数で振動を生じさせて、距離の測定あるいは位置座標を提供する。このようなプローブは、ターゲットに届いたレーダーパルスあるいは、レーダーアンテナに届いた反射信号を減衰させる、比較的インピーダンス又は誘電率が高い、組織、骨、あるいは体液内にターゲットが、インプラントされている場合に有益である。
【0037】
図10を参照すると、プローブのディスプレイ38がマイクロコントローラ36aに接続されて、プローブ30のユーザに、アンテナ32、34を介して得た、例えば空間又はイメージデータといった情報を表示する。例えば、以下に更に説明するように、ディスプレイ38は、単純に、距離、角度、方向、及び/又は、例えば、ターゲット26のプローブ30に対する相対位置など、所定の基準に基づくその他のデータを提供する読み出しであっても良い。図10Aは、提供され得るディスプレイ38の出力の例示的実施例を示す図であり、このディスプレイは、矢印又はその他の表示38aのアレイと、距離読み出し38bを具えていても良い。例えば、マイクロコントローラ36aは、受信した信号を分析して、プローブ30に対してどの方向にマーカ(図示せず)を配置し、適宜の矢印38aを作動させるかを決め、マーカへの距離(例えば、「3cm」が示されている)を表示する。このように、ユーザは、どの方向にマーカが配置されており、その方向においてどれだけ遠いかを認識することができ、これによって、ユーザにマーカとマーカがインプラントされているターゲット組織領域へのガイダンスを提供する。
【0038】
これに加えて、あるいは代替的に、ディスプレイ38は、例えばプローブ30が向かっている領域のリアルタイムでの画像など、すなわち、プローブ30の第1の端部30a、動作パラメータ、その他を超えて、その他の情報を提供することができる。選択的に、プローブ30は、ディスプレイ38に加えて、あるいは代替的に、一又はそれ以上のその他の出力デバイスを具えていても良い。例えば、プローブ30は、音響出力、視覚的出力を提供する一又はそれ以上のLED又はその他の光源など一又はそれ以上のスピーカ(図示せず)を具えており、例えば、空間情報、動作パラメータ、などの情報を提供するようにしても良い。例えば、スピーカ又はLEDは、プローブ30が、例えば所望のマージンといった、マーカから所定のしきい値距離に達した時、作動するか、あるいは、逐次距離が近くなったときに作動するようにしても良い。
【0039】
選択的に、プローブ30は、一又はそれ以上のユーザインターフェース、メモリ、送信器、受信器、コネクタ、ケーブル、電源、その他(図示せず)といった、その他の構成あるいは構成要素を具えていても良い。例えば、プローブ30は、プローブ30の構成要素を動作させる、一又はそれ以上の電池あるいはその他の内部電源を具えていても良い。代替的に、プローブ30は、例えば標準AC電源など、外部電源に接続することができるケーブル(図示せず)を具え、プローブ30の構成要素を動作させるようにしても良い。
【0040】
図10を参照すると、ユーザコントロール37は、キーパッド、タッチスクリーン、個別ボタン、その他(図示せず)といった一又はそれ以上の入力デバイスを具えていても良い。ユーザコントロール37によって、ユーザは、例えばプローブ30をオンオフする、プローブ30をリセットする、その他といった単純な動作を行うことができ、あるいは、プローブ30のより複雑なコントロールも可能である。例えば、ユーザコントロール37によって、プローブ30の感度あるいはその他のパラメータを調整すること、データを遠隔で捕捉し、保存し、送信する、などを行うことができる。
【0041】
選択的に、プローブ30は、アンテナ32、34及び/又はマイクロコントローラ36aを介して取得したデータを記録あるいは保存しておくことができる内部メモリ36fを具えていても良い。例えば、マイクロコントローラ36aは、動作中にデータを自動的に記録することができ、あるいはメモリ36fにデータを選択的に保存するよう指示を受けることもできる。更に、あるいは代替的に、マイクロコントローラ36aは、例えば保存、表示、その他のために、一又はそれ以上の外部デバイスにデータを送信することができる。例えば、プローブ30は、一又はそれ以上のケーブル(図示せず)を具え、これらのデータを送信するようにしても良く、及び/又は、プローブ30は送信器及び/又は受信器(図示せず)を具え、例えば無線周波数、赤外線、あるいはその他の信号を介して、無線でデータを送信し、及び/又は、コマンドを受信するようにしても良い。
【0042】
図1及び10に示すように、プローブ30の内部構成要素のすべてを、ハウジング又はケース39の中に設けて、プローブ30を内蔵型にすることができる。例えば、ケース39は、プローブ30全体をユーザの手の中に保持することができるように、比較的小さい可搬式のものでも良い。選択的に、図1に示すように、ケース39の第1の端部30aは、ケース39のその他の部分と同じ材料あるいは異なる材料で形成することができる。例えば、第1の端部30aは、例えば送信アンテナ32から及び/又は受信アンテナ34へ通じる電磁信号の経路を、実質的な妨害なしに容易に収容する材料で形成することができる。選択的に、この材料は、妨害を低減する、インピーダンスをマッチさせる、あるいはプローブ30を介して患者の身体の外へ信号を容易に送受信するように選択することができる。これに加えて、又は代替的に、所望であれば、プローブ30は、プローブ30の保持又は操作を容易にする、ハンドル、フィンガーグリップ、及び/又は、その他の機構(図示せず)を具えていても良い。
【0043】
代替的に、図11に示すように、ハンドヘルドプローブ131から遠隔のケースに一又はそれ以上の構成要素を具える個別のコントローラ139を具えるプローブ機器130が提供されている。例えば、ハンドヘルドプローブ131は、先端131bに一又はそれ以上のアンテナ132を有する細長ハウジング131aを具えていても良い。コントローラ139は、上述の実施例と同様に、アンテナ132、ディスプレイ138、その他を制御する一又はそれ以上のプロセッサを具えていても良い。ハンドヘルドプローブ131は、一又はそれ以上のケーブル133によってコントローラ139内のプロセッサに接続することができる。例えば、インパルス発生器、インパルス受信器、及び/又は、ゲートコントロールをコントローラ139のケース内に設けても良く、選択的に、所望の場合はハウジング131a内に設けても良い。一実施例では、ケーブル133は、コントローラ139のコネクタ(図示せず)に取り外し可能に接続して、ハンドヘルドプローブ131のアンテナ132をコントローラ139の電子機器に電気的に接続することができる。このように、ハンドヘルドプローブ131は使い捨て可能な、単回使用デバイスであっても良いが、コントローラ139は、コントローラ139に新しいハンドヘルドプローブ131を接続することによって、複数の手順で使用することができる。このことは、以下に更に説明するように外科の分野外にも適用でき、所望の場合、アクセス可能及び/又は可視的なままである。
【0044】
図2A乃至5を参照すると、図1の位置決めシステム10は、例えば、胸部生検や腫瘍摘出手術などの医療処置の間に用いて、例えば、病変やその他のターゲット組織領域42の位置決めを容易にする、及び/又は、胸部41又はその他の身体構造から検体の切除及び/又は除去を容易にすることができる。なお、システム10は、胸部病変の位置決めに特に有益であると記載されているが、システム10は、例えば本明細書に記載されているような身体のその他の領域にあるその他の物体の位置決めにも使用することができる。
【0045】
この手順を行う前に、例えば腫瘍やその他の病変など、ターゲット組織領域を従来の方法を用いて特定することができる。例えば、図2Aに示すように、胸部41内の病変部42を、マンモグラフィ及び/又はその他の画像を用いて特定し、病変部42を除去する決定が行われる。腫瘍42を囲む破線44は、「明確な」マージンを規定しており、例えば、手順を行う間に除去するべき所望の組織検体46のサイズと形状を表示する。例えば、マージン44を選択して、検体46を除去した後の残りの組織が、実質的に癌性あるいはその他の望ましくない細胞ではないことを確実にする。例示的実施例では、病変部42の外側境界と、組織検体46の外側エッジ又はマージン44間の距離が、約1乃至10mmの間であり、例えば、少なくとも約2mmあるいは少なくとも約1cmである。
【0046】
図2A及び2Bを参照すると、位置決めワイヤ20を、例えば、患者の皮膚48から中間組織を通って、ターゲット26が病変部42内に位置するまで組織40を介して経皮的に導入することができる。例示的実施例では、位置決めワイヤ20を送達シース(図示せず)を通して導入することができる。このシースは、本明細書で図20乃至22を参照して説明したカニューレ340と同様に、針及び/又は拡張器(図示せず)を用いて事前に配置することもできる。例えば、カニューレ又は鋭利な先端を有する送達シースは、例えば超音波又はX線撮像をガイダンスとして用いて、皮膚48と中間組織40を通して病変部42へ導入することができ、次いで、位置決めワイヤ20をカニューレを通して進めることができる。代替的に、とがった先端を有する針を組織を通して進めることができ、次いで、送達シースをその針(図示せず)の上に、例えば針と送達シースの間の拡張器と共に進めることができる。送達シースが位置決めされて皮膚48から病変部42に延在したら、針と拡張器を除去する。次いで、位置決めワイヤ22の遠位端22bを送達シースを通して、ターゲット26が病変部42内に位置するまで前進させて、送達シースを取り外す。選択的に、位置決めワイヤ22は、遠位端に、例えば、放射性不透過性マーカあるいは音波を発生するマーカなど、一又はそれ以上のマーカ(図示せず)をターゲット26の上又は近傍に具えており、ターゲット26及び/又は位置決めワイヤ22の遠位端22bを容易に撮像するようにしても良い。位置決めワイヤ20を導入する間及び/又は導入後に、外部撮像を行って、ターゲット26が病変部42内に確実に正しく配置されるようにしても良い。
【0047】
位置決めワイヤ20が、とげ24などの固定要素を具えている場合、このとげ24は、位置決めワイヤ20が送達シースを通って、前進するときに内側に圧縮される。ターゲット26が病変部42内に位置すると、送達シースが引き抜かれ、とげ24が弾性的に近傍組織内へ外側に向けて拡開する。このように、シャフト22の遠位端22b上のとげ24は、位置決めワイヤ20を病変部42に対して固定させ、例えば、ターゲット26が病変部42内の固定位置にほぼ固定されるようにしても良い。これに加えて、あるいは代替的に、包帯、テープ、その他(図示せず)を用いて、位置決めワイヤ22の近位端22aを患者の皮膚48に固定するようにして、例えば、位置決めワイヤ22の移動を防ぐようにしても良い。
【0048】
位置決めワイヤ20が正しく位置決めされた、及び/又は、固定された後、図3に示すように、プローブ30の第1の端部30aが、例えば、通常病変部42上方の患者の皮膚48近傍にあるいはこれと接触して配置される、及び/又は、ほぼターゲット26を向くように配置され、作動する。プローブ30の送信アンテナ32(図示せず、図10参照)は、電磁信号31を発信し、これが組織40を通ってターゲット26で反射される。この信号33は、反射されてプローブ30の受信アンテナ34に戻る(図示せず、図10参照)。プローブ30は、例えばターゲット26とプローブ30の第1の端部30a(及び、プローブ30の第1の端部30aが接触している場合は患者の皮膚48)との間の距離52などの、ターゲット26とプローブ30の第1の端部30aとの間の空間的関係を、例えば信号31が移動した距離、信号31の送信と反射信号33の受信との間の時間パッセージ、その他に基づいて、決定する。選択的に、プローブ30は、ターゲット26と第1の端部30aとの間の相対角度を決定して、例えば、切除を行う正しい方向の決定を容易にするようにしても良い。
【0049】
一の実施例では、プローブ30のマイクロコントローラ36a(図示せず、図10参照)が受信した信号をフィルタにかけるか、あるいはこれを分析して、例えば、ターゲット26のサイズ、形状、あるいはその他の特徴の認識に基づいて、ターゲット26を位置決めする。このように、マイクロコントローラ36aは、ターゲット26を自動的に認識して、患者の身体内にあるその他の構造からターゲットを区別することができる。代替的に、マイクロコントローラ36aは、ターゲット26を推定して位置決めするプローブ30へ信号を反射して戻す対象物を単に位置決めすることができる。例えば、マイクロコントローラ36aは、プローブ30の第1の端部30aからの距離52及び/又はこの端部に直交して延在する軸に対する角度を計算して、ディスプレイ38上の空間情報を表示する。この情報は、ターゲット26、ひいては病変部42の位置決めを容易にし、例えば、病変部42を含むターゲット組織領域にアクセスする切開の方向と深さを提供することによって、病変部42の上にある組織を切除する外科医にガイダンスを提供する。
【0050】
これに加えて、あるいは代替的に、所望の場合にその他の情報をディスプレイ38に表示することができる。例えば、ディスプレイ38は、ターゲット26とターゲット組織検体46の外側マージン44との間の距離54を提供し、この距離で除去する組織検体46の目標サイズと形状を容易に規定することができる。距離54を決定するためには、プローブ30は、所望のマージン44とターゲット42との間の所定の距離を、例えば、プローブ30のプロセッサ36にプログラムされており予め設定されたパラメータに基づいて、あるいは、手順の直前に例えば、ユーザコントロール37(図示せず、図10参照)を介してユーザによってマイクロコントローラ36aに提供された寸法に基づいて、自動的に差し引いても良い。
【0051】
続いて図3を参照すると、選択的に、プローブ30は、皮膚48に対向するあるいは近傍に及び、所望の場合は取得した空間情報に配置することができる。このような情報は、外科医が、例えば、病変部42への最短路など、切除のための最適アプローチを行う経路を決定するのを容易にする、又は、病変部42に対して外科医を三次元で方向づけるよう補助する。患者の皮膚48と皮膚48上の所望の位置からのターゲット26間の距離52を決定した後、図4に示すように、組織40を切除して組織検体46の所定の外側エッジ44に到達する。例えば、プローブ30が配置された位置において患者の皮膚48を切開し、マージン44に対応する深さに達するまで、既知の方法を用いて中間組織を切除する。選択的に、切除を行っている間はいつでも、プローブ30と取得した時空間情報を露出した組織に対向してあるいはその近傍に配置して、このアプローチ、及び/又は、切除の深さを確認できる。
【0052】
図4を更に参照すると、所望であれば、外科医が所望のマージン44が達成されたと思ったら、プローブ30によって別の長さの測定を行い、ターゲット26に対する所望の距離54は達成されたことを確認する。例えば、プローブ30の第1の端部30aを切除した組織領域の底面に接触させて配置し、信号31を送信アンテナ32によって送信し、信号33を受信アンテナ34で受信して、プローブ30が切除した組織領域の底面とターゲット26との間の距離を決定することができる。組織検体46の所望のマージン44に達していることを確認した後、組織検体46を、従来の腫瘍摘出手術を用いて、除去した検体46内にターゲット26を残して、摘出する又は除去することができる。所望であれば、例えば、シャフト22の遠位端22bを切り取る、シャフト22とターゲット26との間のコネクタ(図示せず)をはずす、その他によってターゲット26をシャフト22から分離して、検体46の除去を容易にする。
【0053】
図5を参照すると、所望であれば、プローブ30が、例えば、所望のマージン44がターゲット26の周囲に達成され、その結果病変部42の周囲に達成されるのを確認するように、切除した検体46を分析するために使用されても良い。図に示すように、プローブ30によって送信信号31が送信され、信号33がターゲット26で反射されてプローブ30で受信される。この時、プローブ30が距離54及び/又はその他の空間情報を決定して、表示する。このようにして、所定の組織マージンが達成されたことを確認することができる。
【0054】
図6乃至9を参照すると、病変、又は例えば複数の触診不可能な病変部142など、その他の組織構造を位置決めするシステム110別の例示的実施例が示されている。このシステムは、プローブ30と、複数のインプラント可能なマーカ又はターゲット120を具える。プローブ30は、可搬デバイスであり、本明細書に記載した実施例と同様に、電磁信号を送信し、反射信号を受信することができる。
【0055】
マーカ120は、組織を通って、病変部142周辺領域に導入するサイズの複数のインプラント可能なエレメントを具えている。例えば、マーカ120は、複数のストリップ、シリンダ、らせん、球、その他として形成されていても良く、図1に関連して上述したターゲット26、及び/又は、例えば、図23A乃至28C、34A、34B、41A及び41Bを参照して更に本明細書に記載されているマーカと同様に、プローブ30によって送信された電磁信号の反射を強化する構造を有する。
【0056】
図6に示すように、マーカ120は、例えば、長さ約0.5乃至4mm、幅約0.5乃至2.0mm、厚さ約0.5乃至3.0mmの、長方形あるいはその他の形状のマーカなど、細長いストリップであっても良い。このマーカ120は、金属又はその他の材料でできており、例えば、所望の誘電率を有しており、プローブ30による反射を強化することができる。これに加えて、あるいは代替的に、マーカ120を生体吸収性材料で構成しても良く、例えば、マーカ120を組織内にインプラントし、数日後、数週間後、又は数ヵ月後といった時間がたつと組織に溶けるあるいは吸収されるようにしても良い。
【0057】
選択的に、マーカ120を、放射線不透過性材料、放射性材料、及び/又はエコー発生材料で形成して、例えば導入中、手術中に配置した後、あるいはマーカ120が術後患者の体内に残っている場合はその後、などにマーカ120の撮像あるいはモニタリングを容易にするようにしても良い。これに加えて、所望の場合、各マーカ120は、本明細書に述べたように、一又はそれ以上の当該マーカをその他のものから識別できる、表面、形状、及び/又は追加の材料構成を有していても良い。例えば、各マーカ120は、所定の方法でプローブ30からの入射信号を変調する、及び/又は、マーカ120に特異的な特別な電磁信号を吸収又は反射するようにしても良く、マーカを独自に同定するのに使用することができる。
【0058】
更に、図6に示すように、システム110も患者の身体内にマーカ120を導入する一又はそれ以上の送達デバイス160を具える。例えば、送達デバイス160は、近位端162aと、組織を通ってターゲット組織領域(図示せず)へ導入し、一又はそれ以上のマーカ120を担持するサイズの遠位端162bとを具える、シャフト162を具えていても良い。送達デバイス160は、シャフト162の近位端及び遠位端162a、162bの間に少なくとも部分的に延在するルーメン164と、シャフト162内で摺動可能で一又はそれ以上のマーカ120を連続的にあるいは独立してルーメン164から選択的に送達する押出部材166を具える。
【0059】
図に示すように、シャフト162の遠位端162bは斜めになっている及び/又はとがっており、シャフト162を組織を通って直接導入できる。代替的に、本明細書に記載したように、送達デバイス160を、組織内に予め配置しておいた、カニューレ、シース、あるいはその他の筒状部材(図示せず)を通して導入するようにしても良い。選択的に、遠位端162bは、例えば、放射線不透過性、エコー発生、あるいはその他の材料で形成した、バンドあるいはその他の構造を具えていても良く、例えば、蛍光透視法、超音波、電磁信号、その他を用いて導入中に遠位端162bのモニタリングを容易にすることができる。
【0060】
図に示すように、押出部材166は、マーカ120近傍のルーメン164内に配置したピストン又はその他のエレメント(図示せず)と、当該ピストンを前進させてルーメン164からマーカ120を押し出す、ピストンに連結されたプランジャ又はその他のアクチュエータ168を具えている。図に示すように、プランジャ168を手動で前進させて、ルーメン164から連続的に一又はそれ以上のマーカ120を送達することができる。代替的に、トリガデバイス又はその他の自動アクチュエータ(図示せず)をシャフト162の近位端162bに設けて、各動作でピストンを十分に前進させて、例えば、遠位端162bから個々のマーカ120を送達するようにしても良い。
【0061】
図6乃至9を参照すると、マーカ120とプローブ30を用いて、胸部41又はその他の組織構造内の病変又はその他のターゲット組織領域142を位置決めする、例示的な方法が示されている。図6及び7に示すように、マーカ120を組織40内にインプラントして、切除すべき組織検体146の所望のマージン又は体積144を描写するようにしても良い。例えば、送達デバイス160のシャフト162は、患者の皮膚48を通って、中間組織40を通って経皮的に挿入し、外部撮像を用いるなどして、遠位端162bを所望の位置にガイドして、病変部142内あるいはその周辺に遠位端162bを配置することができる。正しい位置に配置されると、プランジャ168を前進させて(あるいは、シャフト162をプランジャ168に対して後退させて)、組織にマーカ120を送達することができる。送達デバイス160は更に別の位置に前進させ、及び/又は胸部41から完全に除去して皮膚48の別の位置を通ってターゲット組織領域に前進させ、例えば、一又はそれ以上のマーカ120を送達するようにしても良い。
【0062】
代替的に、送達デバイス160は単一のマーカ120を担持するようにして、複数送達デバイス(図示せず)を設けて、各マーカ120を送達するようにしても良い。更に、あるいは代替的に、定位デバイス(図示せず)を用いて、例えば、患者の身体内に所望の三次元アレイの形の一又は複数の送達デバイス、又は、病変部142の位置を認識するその他の構成を導入するようにしても良い。更なる代替例では、マーカ120を、ワイヤ10と同様の複数の位置決めワイヤ、順次又は同時に送達することができる一又はそれ以上のカテーテル(図示せず)、その他で置き換えることができる。選択的に、カテーテル、ワイヤ、あるいはその他のデバイスは、例えば遠位領域(図示せず)で拡張可能であり、検体の体積あるいは領域の拡大及び/又は位置決めを容易にすることができる。
【0063】
図6及び7に示す例示的実施例では、例えば、病変部142の周囲の検体体積を除去する手術の前、あるいはその間にマーカ120が触診不可能な病変群142の周囲を囲んでいる。組織検体146の外側エッジ144と、病変部142との間の距離156を選択して、除去された組織の体積が、上述した方法と同様に、はっきりしたマージンを確実にするのに十分な組織の体積を除去するように選択することができる。
【0064】
図7に示すように、マーカ120をインプラントした後に、プローブ30を患者の皮膚48に対してあるいはその近傍に配置して(例えば、信号を組織40に送信したり、組織40から受信したりするのに患者の皮膚48にプローブ30を接触させる必要はない)、プローブ30を用いて、上述の実施例と同様に、プローブ30とマーカ120との間の距離152(及び/又はその他の空間情報)を測定することができる。特に、プローブ30から出射した信号31がマーカ120で受信され、反射されてプローブ30内の受信器に信号33として戻り、プローブ30はこの信号を用いて、患者の皮膚48とマーカ120との間の距離152を測定する。
【0065】
次いで、病変部142を囲む組織40を、図8に示すように、マーカ120の一つにあたるまで切除する。この時点で、プローブ30を用いて別の測定を行い、正しい切除深さを確実なものにすることができる。次いで、プローブ30を図8に点線で示すように再配置して、組織検体146の周辺部144の周りに別のマーカ120を配置する。距離測定の結果を用いて、病変部142の周りの切除用の所望のマージン体積を測定することができる。この手順を所望するだけ繰り返して、病変部142の周りの組織検体146を切除する間に、マーカ120の距離に基づいて所望のマージンを容易に測定することができる。組織検体146は、マーカ120を含んでおり、すべてのマーカ120を組織検体146と共に除去するようにしても良い。代替的に、所望のマージンをマーカ120内に規定して、組織検体146を除去した後にマーカ120が胸部内に残るようにしても良い。この代替例では、マーカ120は生体吸収性であるか、あるいは不活性で、永久に患者の胸部41に残るものであっても良い。
【0066】
図11乃至15を参照すると、胸部41内の一又はそれ以上の病変部142を特定する及び/又は病変部142を含む組織検体146(図14A乃至15Aに示す)を除去する、別の例示的システム及び方法が示されている。上述の実施例と同様に、このシステムは一又はそれ以上のマーカ220とプローブ機器130を具え、病変部142の位置決め、及び/又は胸部41から除去した組織検体146の所望のマージンの確実な達成を容易にしている。プローブ機器130は、上述したように、プローブ131の動作を制御する一又はそれ以上のプロセッサを有するプロセッサ139に連結されたハンドヘルドプローブ131を具える。同じく上述したように、ハンドヘルドプローブ131は、プローブ131の一方の端部の先端131b上にあるいは中に一又はそれ以上のアンテナ132を具える細長ハウジング131aを有しており、このハウジングを、皮膚48、又はその他の組織に対して、及び/又は、マーカ220及び/又は病変部142の方向にほぼ向けて配置することができる。
【0067】
プロセッサ139は、上述の実施例と同様に、アンテナ132、ディスプレイ138、その他を制御する一又はそれ以上のプロセッサを具えていても良い。ハンドヘルドプローブ131は、一又はそれ以上のケーブル133によってプロセッサ139に接続されている。例えば、インパルス発生器、インパルス受信器、及び/又は、ゲートコントロールをプロセッサ139内に設けることができ、これらは、アンテナ132を介して信号を発信受信するように制御される。
【0068】
選択的に、図14及び14Aに示すように、ハンドヘルドプローブ131は、例えば、ハウジング131aの先端131bから延在する切除構造133を具えている。一の実施例では、この切除構造133は、例えば、長さ約10乃至50mm及び/又は幅約1乃至10mmの、プローブ131の先端131bに固定された比較的フラットで先の丸い切除器であっても良い。代替的に、切除構造133は収納可能であり、例えば、切除構造133が初めはハウジング131a内に収納されているが、組織の層を切除してマーカ220近傍の組織にアクセスしたい場合に、選択的に展開するようにしても良い。更なる代替例では、切除構造133は、とがった刃又はエッジを具えており、患者の皮膚48及び/又はその下の組織層40を容易に切開することができる。
【0069】
まず、図11に示すように、使用中は、一又はそれ以上のマーカ220を、例えば、本明細書に記載されているマーカ及び/又は方法を用いて、ターゲット組織領域内にインプラントする。例えばケーブル133によってプロセッサ139にプローブ131を接続し、プローブの先端131bを皮膚48に対して配置する。プローブ131を作動させて、例えば、プローブ131の先端131bからマーカ220の初期距離をアンテナ132を用いて測定し、これによって病変部142におおよその距離を提供する。この距離の測定は、例えば図12に示すように、プロセッサ139のディスプレイ138上に表示され、及び/又は、ユーザに提供される。これに加えて、あるいは代替的に、上述した通り、合成音声、対応する距離を同定する一又はそれ以上のトーン、その他を用いて距離を同定するなど、スピーカが距離の測定を行うようにしても良い。例えば、プロセッサ139は受信した信号を分析して、プローブ131の先端131bからマーカ220への実際の距離を測定することができ、また、スピーカを介して実際の距離を提供することができる。代替的に、スピーカが、例えば、第1のスレッシュホールドに対する第1のトーン、第2のより近い距離に対する第2のトーン又は複数のトーンといった、所定のスレッシュホールドに対応するトーンを提供して、これらがマーカ220により近くなっている旨を表示することができる。
【0070】
図11に示すように、胸部41の第1の側部にあるプローブ131を用いて、測定値L1を得、一方、胸部41の反対側の第2の側部に配置したプローブ131’を用いて、L1より大きい測定値L2を得る。この情報を用いて、外科医は、第1の側部の切除を開始することを決定する。なぜなら、この情報は、図12に示すように、第2の側部から開始した経路より、より少ない組織切除を必要とする、短い経路を提供するためである。
【0071】
図13を参照すると、プローブ131を用いて、マーカ220の周りに、続いて病変部142の周りに所望のマージンL3を特定することができる。例えば、1cmの所望のマージンL3が求められている場合、プローブ131は、ディスプレイ138上に示すようにプローブ131からマーカまでの実際の距離L1を表示又は提供して、これによって、マージンL3の外側にプローブ131が残っていることを表示する。代替的に、プロセッサ139が所望のマージンL3を認識すると、ディスプレイ138は、実際の距離L1と所望のマージンL3との間の差(すなわち、L1−L3)を提供し、これによって、外科医に所望のマージンを得るのに必要な切除深さを通知する。
【0072】
選択的に、図14及び14Aに示すように、プローブ131が先の丸い切除器144を具える場合、この切除器144はプローブ131の先端131bから展開させて(永久的に展開しない場合は)、組織40を通ってマーカ220に向けて、例えば所望のマージンL3が得られるまで前進させる。プローブ131は、次いで、先の丸い切除器144を用いて、及び/又は一又はそれ以上の追加の切除器、メス、あるいはその他のツール(図示せず)を用いて、マーカ220の周囲の組織を切除するよう操作される。
【0073】
図15及び15Aに示すように、マーカ220と病変部142を含む組織検体146を胸部41から除去した。選択的に、プローブ131を用いて、所望のマージンL3がマーカ220の周りに達成されていることを確認し、これによって、上述の実施例と同様に、十分な組織が胸部41から除去されたことを確認する。
【0074】
図16Aと16Bを参照すると、一又はそれ以上のマーカ220と、一又はそれ以上のアンテナ232を担持する指サック231aを具えるプローブ231と、アンテナ232に例えばケーブル233で接続されているプロセッサ239と、を具えるシステムの更に別の実施例が示されている。指サック231aは、柔軟なスリーブであり、これは、例えば、指90を入れる開放端231bと、閉鎖端231cを具え、指90を超えて確実に受け入れる十分な長さを有する。例えば、指サック231aは、外科用あるいは検査用手袋と同様に、指90を受けて収納する一方で、指サック231aが使用中に指90が滑らないように内側に圧縮するように、拡張する十分な柔軟性を有する、比較的薄いラテックス層、天然あるいは合成ゴム、などの弾性材料で形成することができる。
【0075】
図に示すように、閉鎖端231c近傍にアンテナ232を設けることができる。例えば、アンテナ232は、上述の実施例と同様に、ケースの中に送信アンテナと受信アンテナ(図示せず)を具えていても良い。このケースは、指サック231aに、例えば閉鎖端231c近傍で、例えば、接着剤を用いた接着、溶融、一又はそれ以上のバンド(図示せず)、その他により取り付けることができる。
【0076】
プロセッサ239は、アンテナ232を動作させる及び/又はアンテナ232から受信した信号を処理するため、上述の実施例と同様に、例えばアンテナ232にケーブル233で接続され、ディスプレイ238を具える一又はそれ以上の構成要素を具えている。図に示す実施例では、プロセッサ239は、プロセッサ239を指サック231aに指を挿入しているユーザの腕に取り外し可能に固定する、一又はそれ以上のクリップ239a、ストラップ、ベルト、クランプ、あるいはその他の構造(図示せず)を具える。例えば、クリップ239aは、ユーザの前腕の周りに部分的に延在するように曲がっていても良く、クリップ239aは、クリップを開いてその中に腕を受けるのに十分な柔軟性があり、アームの周りに少なくとも部分的に係合するよう弾性的な閉じたものであっても良い。代替的に、プロセッサ239は、上述したプロセッサ139と同様に、患者及び/又はユーザから離れて配置したケース(図示せず)に配置することができる。
【0077】
図17及び18を更に参照すると、使用中に、外科医あるいはその他のユーザは、例えば人差し指や親指などの指90を指サック231aに入れることができ、プロセッサ239を作動させて、上述の実施例と同様に、アンテナ232を介して信号を送受信する。
【0078】
図17に示すように、指サック231aに入れた指90を患者の皮膚48に対して配置し、距離の測定値を得てマーカ220への距離を特定することができる。マーカ220の上の組織が切除されると、ユーザは、図18に示すように、そこにできた経路に指90を入れて、マーカ220の位置をユーザに直接フィードバックし、次いで、指90に対する病変部142の位置をフィードバックする。このように、この実施例は、距離の測定と共に触覚フィードバックをプローブ231に提供するものであり、マーカ220と病変部142を含む組織検体146の切除及び/又は除去を容易にする。例えば、図17に示すように、最初の測定距離L1が得られ、必要な切除深さをユーザに通知する一方、図18に示すように、測定距離L2を得て(所望のマージンに対応する)、これによって、上述の実施例と同様に、十分な切除が行われたこと、及び組織検体146が分離除去できることをユーザに通知する。
【0079】
図19乃至22を参照すると、例えば一又はそれ以上の病変部142を含むターゲット組織領域を位置決め及び/又はアクセスする更に別のシステムが示されている。一般的に、このシステムは、上述した実施例と同様に、プロセッサ339に接続されたハンドヘルドプローブ331を具える、プローブ機器330を有する。例えば、プローブ331は、一又はそれ以上のアンテナ332を具え、プロセッサ238はディスプレイ338を具える。
【0080】
更に、このシステムは、近位端342、遠位端344、及びこれらの間に延在するルーメン346を具えるカニューレ又はその他の筒状部材340を具える。カニューレ340は、図19に示すように、プローブ331をルーメン346内に受けることができるようなサイズを有する、実質的に硬質の筒状ボディである。図に示すように、遠位端344は斜めになっていたり、とがっていたり、及び/又は組織を通って直接の前進を容易にするように形成することができる。代替的に、遠位端344は、テーパを付ける、及び/又は、丸みが付けられていても良く(図示せず)、上述の実施例と同様に、例えば針が組織40内に導入される前又は後に、カニューレ340が針の上を前進するようにしても良い(図示せず)。
【0081】
図19を参照すると、使用前に、プローブ330をカニューレ340のルーメン346に挿入して、例えば、アンテナ332をカニューレ340の遠位端344の直近に配置する。選択的に、カニューレ340及び/又はプローブ331は、プローブ331をカニューレ340に開放可能に固定する一又はそれ以上のコネクタ(図示せず)を具え、例えば、アンテナ332を遠位端344近傍に維持する一方で、必要があればプローブ331を取り外せるようにしても良い。更に、あるいは代替的に、カニューレ340は一又はそれ以上のシール(図示せず)を、例えば近位端342及び/又は遠位端344内に具え、プローブ331をルーメン346内に配置する及び/又はプローブ331を取り外すときに、実質的に液密シールを提供するようにしても良い。例えば、止血シール(図示せず)を近位端342に設けて、ルーメン346を通る液流を防ぐシールを提供すると共に、ルーメンを通るプローブ331あるいはその他の機器(図示せず)を受けて収納する。
【0082】
図20を参照すると、使用中に、カニューレ340内で作動しているプローブ331を用いて、カニューレ340の遠位端344を患者の皮膚48と組織40を通ってマーカ220へ挿入することができる。図に示すように、プローブ331は信号31を送信し、プロセッサ339のディスプレイ338は、距離測定値L1、あるいはアンテナ332で受信した反射信号に基づくアンテナ332に対するマーカ220の相対位置のその他の表示、続いて、カニューレ340の遠位端344に対するマーカの位置を提供することができる。このように、カニューレ340の貫通深さ及び/又は進行方向を、プローブ331とプロセッサ339によって提供される情報に基づいて調整することができる。例えば、図21に示すように、カニューレ340は、所望の距離L2が達成されるまで前進させて、これによって、遠位端344を、例えば、病変部142近傍のターゲット組織領域内の、マーカ220から所望の距離だけ離して配置する。
【0083】
図22を参照すると、病変部142に対して所望の位置に配置されたカニューレ340の遠位端344を用いて、プローブ331を取り外し、図に示すように、カニューレ340を適所に置く。カニューレ340は、これによってターゲット組織領域にアクセスする経路を提供し、例えば、一又はそれ以上の診断及び/又は治療プロセスを実行する。例えば、針あるいはその他のツール(図示せず)をカニューレのルーメン346を通して前進させて、生検を行う及び/又は流体あるいはその他の診断又は治療用材料をターゲット組織領域に送達する。更に又は代替的に、例えば病変部142を含む組織検体を除去するために一又はそれ以上の機器(図示せず)をカニューレ340を通して導入し、放射線治療及び/又はその他のプロセスを送達する。アクセスが不要になったら、カニューレ340を単に取り外す。代替的に、プロセスを行う間にカニューレ340を再配置する必要がある場合は、プローブ331をルーメン346に再度導入して、更なるガイダンスを提供するプローブ331を用いて組織内にカニューレ340を再配置する。
【0084】
図11乃至22には、例えば病変部142内あるいはその近傍に、上述したものと同様の方法を用いて組織40内にインプラントできるあるいは組織40内に配置できるマーカ220が示されている。図に示すように、マーカ220は一般的に、球形の端部間に比較的狭い中央ステム部分を有するほぼ細長のボディを具える。マーカ220は、所望の材料で形成されていても良く、及び/又はこの材料の中のその他のマーカと同様の表面特徴を具えていても良い。この特徴により、マーカ220の位置決め及び/又はマーカ220を互いに区別することが容易になる。
【0085】
図23A乃至28Cを参照すると、マーカの更なる実施例が示されており、これらの実施例は本明細書に記載されているいずれのシステム及び方法にも使用することができる。例えば、図23A乃至23Cを見ると、第1の例示的マーカ320が示されており、このマーカは、複数のビーズ又はセグメント324を担持したコアワイヤ322を具える。コアワイヤ322は、例えば、直径又はその他の最大断面が約0.5乃至2mm、長さ約1.0乃至10mmの中実あるいは中空構造の、細長部材である。コアワイヤ322は、弾性材又は超弾性材、及び/又は、例えばステンレススチール、ニチノールなどの形状記憶材料で形成されており、コアワイヤ322がバイアスされて、以下に更に説明するように、組織内で展開した時に所定の形状になる。代替的に、コアワイヤ322は、ほぼ硬質であって、以下に更に説明するようにマーカ320が直線状あるいは曲線状など、固定形状を維持するものでも良い。
【0086】
図24A乃至24Cに最も良く見られるように、ビーズ324は、例えば、各々がほぼ筒状又は球形の一部を規定している複数の個々の環状ボディを具えていても良い。ビーズ324は、上述の実施例と同様に、例えば、ステンレススチール、ニチノール、チタン、その他、などの金属、プラスチック材料、あるいは合成材料といった所望の材料で形成することができる。ビーズ324は、射出成形、鋳型、機械加工、切断、研磨、その他を行うことによって形成できる。更に、所望の仕上げを、例えば、サンドブラスト、エッチング、化学蒸着、その他によってビーズ324に施すようにしても良い。
【0087】
図24Bに最も良く見られるように、各ビーズ324は、その中にコアワイヤ322(図示せず、例えば図23A乃至23Cを参照)を受ける経路326を具えている。ビーズ324は、コアワイヤ322上に固定する際に、少なくとも部分的に互いに隣接して入れ子式にして、さらに、例えばコアワイヤ322が形状を変えるようにマーカ320の形状を変えるような形状及び/又は表面構造を具えている。更に、ビーズ324は、例えばレーダーなど電磁波の反射を強化する、例えば、ビーズの周辺の周りに一又はそれ以上の溝を有する表面ジオメトリを具えている。この溝は、約45°乃至135°の、あるいは約90°といった、急な角度を規定する隣接する面を伴う複数の面を具える。例えば、図24Cに最も良く見られるように、各ビーズ324は、第1の凸部又は球状端部324aと、平坦面324dを有する第2の凹状端部324bを具える。図25Bに示すように、隣接するビーズ324’は、第1のビーズ324の凹状端部324b’の平坦面324d’と、隣接するビーズ324’の球状端部324a’の表面324e’との間の溝324c’を規定している。面324d’及び324c’は、これらの間の急な角部を規定しており、これらの角部は、例えば、約90°の角度を規定して、レーダーを用いた検出を強化している。
【0088】
選択的に、図25A及び25Bに示すように、ビーズ324’は、電磁信号がビーズ324’の表面に当たったときに発生する反射信号をカスタマイズするようにした所望の面仕上げ324f’を具えていても良い。例えば、面仕上げ324f’は、ビーズ324’に形成され、所望の径及び/又は深さを有する複数の孔又は凹みを具えていても良い。上述した通り、本明細書に記載されているプローブとプロセッサは、このような反射信号を分析して、例えば、複数のマーカがインプラントされている場合、あるいは患者の身体内に配置されている場合に、特定のマーカを独自に同定することができる。
【0089】
図23A乃至23Cを参照すると、組み立てを行う間に、複数のビーズ324をコアワイヤ322の上に配置してこれに固定し、最終的なマーカ320を提供することができる。例えば、ビーズ324がコアワイヤ322の端部間にほぼ延在するまで、ビーズ324の経路326にコアワイヤ322を連続的に挿入する。ビーズ324はコアワイヤ322に、例えば個々のビーズ324をコアワイヤ322にクリンプする、十分なビーズ324の上を摺動させた後コアワイヤ322の端部をクリンプする、又は膨張させる、接着剤で接着する、溶融させるなどによって、コアワイヤ322に固定することができる。このように、ビーズ324は、コアワイヤ322にほぼ永久的に取り付けて、ビーズ324が動かないようにする、あるいは、ビーズ324がコアワイヤ322の上を自在に浮遊することができるようにして、コアワイヤ322、ひいてはマーカ320を、容易に曲げたり、あるいは形を付けられるようにしても良い。
【0090】
代替的に、マーカ320は、単一ピースの材料で形成して、例えば、図23Aに示すビーズ324によって規定した形状と表面をワークピースに形成するようにしても良い。この代替例では、コアワイヤ322をなくすか、あるいは、コアワイヤ322を受ける経路をワークピースに形成しても良い。
【0091】
一実施例では、マーカ320は、例えば図23A及び23Bに示すような直線形状、あるいは図23D及び26A乃至26Cに示すような曲線形状といった、実質的に固定された形状を規定することができる。例えば、マーカ320のコアワイヤ322は、十分に柔軟であり、マーカ320を真っ直ぐにして、例えば、送達デバイスへのマーカ320の装填及び/又はマーカ320の送達を容易にすることができ、更に、マーカ320にバイアスをかけて曲線状あるいはその他の直線形状にしても良い。
【0092】
図23Dに示すように、マーカ320にバイアスをかけて、例えば、平面内蛇行あるいはその他の曲線形状など、波形にするようにしても良い。例えば、コアワイヤ322は、コアワイヤ322にバイアスをかけて波形になるようにセットした形状の弾性あるいは超弾性材で作っても良く、更に、弾性的に伸ばして直線形状としても良い。ビーズ324は、間隔を空けて配置するか、あるいはビーズ324が直線形状と波形の間でのコアワイヤ322の変形と実質的に干渉しないように入れ子式にして、例えばマーカ320の送達デバイスへの装填、及び/又はマーカ320の本体への導入を容易にすることができる。
【0093】
代替的に、図34A及び34Bに示すように、例えば、テーパの付いた端部領域320b’’’間の比較的広い中間領域320a’’’を含むテーパ付きらせん形状になるようにバイアスをかけたマーカ320’’’を提供しても良い。マーカ320’’’’の別の代替実施例が図41A及び41Bに示されており、これは径がほぼ均一ならせん形状になるようにバイアスされている。マーカ320’’’や320’’’’の一つの利点は、これらのマーカがプローブのアンテナ(図示せず)に対するマーカ320’’’や320’’’’の反射角度及び/又は位置に関係なく、比較的一定の及び/又は一貫性のあるレーダー断面(RCS)を提供することである。例えば、マーカ320’’’や320’’’’が、例えば、図34B及び41Bに示すように、らせん軸に沿って見える場合でも、マーカ320’’’や320’’’’は、例えば図34Aや41Aに示すような、らせん軸に対して水平方向に見える場合とほぼ同様のRCSを提供する。
【0094】
選択的に、本明細書に記載したマーカはどれも、受動マーカ、能動マーカ、能動反射器、あるいは能動トランスポンダとして提供することができる。例えば、図23A乃至23Dを参照すると、マーカ320は、単純な「受動反射器」である。すなわち、マーカ320は、マーカ320にあたる入射波又は信号を単に反射するだけである。入射信号は、マーカ320の様々な面及び/又は端部で反射され、例えば、これによって、本明細書で更に述べているようにプローブで検出する反射波又は信号を提供する。受動マーカの一つの欠点は、レーダ断面(RCS)が、プローブのアンテナとマーカ320のアスペクト角に基づいて変化し、これが、マーカ320から反射されて戻ってきた信号の強度を変えることである。
【0095】
代替的に、マーカ320は、「能動反射器」を提供する一又はそれ以上の構造を具えていても良い。すなわち、マーカ320は一又はそれ以上の電子回路を具えており、この回路がマーカ320に当たる信号を所定の方法で、反射信号に外部エネルギィ又は電力を加えることなく変調する。このようなマーカは、変調ダイポール又は、例えば非常にわずかな電流で作動する一又はそれ以上の非常に低出力のダイオード及び/又はFETトランジスタを具える、その他の型の能動反射アンテナを具える能動反射無線エレメントを具えていても良い。能動反射器は、プローブで検出及び同定できる埋め込み組織環境内の実質的に唯一のレーダー信号の特徴を提供する。更に、能動反射器は、プローブに戻す比較的大きい信号を提供し、例えば、これによって、アンテナの形に無関係にターゲットRCSを維持することができる。
【0096】
例えば、マーカ320は、マーカ320に接続されたあるいは埋め込まれた、プローブからの入射波又は信号を偏重する一又はそれ以上の回路又はその他のエレメント(図示せず)を具えていても良い。例示的な実施例では、ナノスケールの半導体チップがマーカ320に担持されており、これは自体のエネルギィ源を持っておらす、従って信号がマーカ320で受信あるいは反射されるときに信号を処理し変調するだけである。マーカに設けることができる能動反射器の例示的な実施例は、米国特許公報第6,492,933号に開示されている。
【0097】
図50A及び50Bは、能動反射器を用いて達成することができる入射信号Aに対する反射信号Bの変調の一例を示す。入射信号Aは、本明細書に記載されているプローブのいずれかのようなプローブ(図示せず)によって送信された波動又は信号を表わしている。図50Aに示すように、入射信号Aは本明細書に記載したマーカのいずれかのような表面に当たり、反射して、反射信号Bになる。受動反射器では、マーカの表面は単に入射信号Aを反射するだけであり、従って、反射信号Bは、入射信号Aと同じ、例えば、帯域、位相、その他の特性を有する。
【0098】
反対に、能動反射器では、マーカが入射信号Aを所定の方法で変調して、例えば、反射信号Bの周波数及び/又は位相を変化させる。例えば、図50Bに示すように、マーカ上の回路は、超広域ブロードバンドレーダー入射信号Aを、例えば約1乃至10ギガヘルツといった比較的帯域が狭い反射信号Bに変える。これは、やはり所定の位相シフトを含む。比較的狭い帯域の反射信号Bは、マーカのRCSを強化し、これによって、プローブの検出を強化する。
【0099】
更に、図50Bに示すように、反射信号Bの位相は、入射信号Aに対して90°変調されている。マーカがこの位相シフトにおいて唯一のものであれば、個の位相シフトによってプローブがマーカを、例えば位相シフト、組織構造、その他が異なるその他のマーカなどの、その他の構造から同定し区別することが容易になる。例えば、複数マーカを患者の本体にインプラントする場合は、各マーカの回路が、反射信号において異なる位相シフト(例えば、+90°、+180°、−90°、その他)及び/又は帯域幅となるように構成する。このように、プローブは、マーカを互いに、及び/又は、患者の身体のその他の構造から、容易に同定し区別することができる。
【0100】
能動反射器の一つの利点は、回路自体に電源が必要でないことである。従って、回路のサイズが実質的に小さくなり、所望であれば、期間を延長して、あるいは、永久的にでも、マーカを患者の身体内にインプラントすることができ、更に、そのマーカがプローブからの信号に応答して、マーカの位置決め及び/又は同定を容易にすることができる。
【0101】
更なる代替例では、励起エネルギィ基準に応じて検出可能なエネルギィを発生する一又はそれ以上の特徴を有する「能動マーカ」を設けるようにしても良い。このような能動マーカの例は、米国特許公報第6,363,940号に開示されている。
【0102】
更なる代替例では、能動トランスポンダが設けられている。これは、例えば、埋め込み組織環境内でレーダー信号特性の独自性を提供するMIRプローブエネルギィを再送する、あるいは「応答する」。能動トランスポンダは、マーカに埋め込まれたあるいはマーカに担持されている一又はそれ以上の電子回路を具え、例えば、一又はそれ以上のバッテリィ、コンデンサ、その他、といった内部エネルギー源を有する。一の例示的実施例では、能動トランスポンダは、マイクロ波受信器及び/又は送信器と、データ処理及び保存エレメント、リターン信号の変調システムを具えている。能動トランスポンダは、プローブから発した励起マイクロ波エネルギィに応じてマイクロ波エネルギィを発生し、例えば、受動マーカでのみ可能であった、より大きい信号をプローブに返す。例えば、マーカは、プローブからの独自のレーダーシグネチュア及び/又は周波数に応じてフォーマットしたデータを含むRFエネルギィを発生する。例示的実施例では、能動トランスポンダは直交変調され、MIRレーダーの上側波帯(USB)又は下側波帯(LSB)のいずれにも単側波帯(SSB)信号を出力する。このようなトランスポンダは、RFスペクトルにわたる多重チャンネル動作の可能性を提供する。
【0103】
図29A及び29Bを参照すると、送達デバイス260が設けられており、これは、例えば胸部41内のターゲット組織領域に組織を取って導入できるサイズであり、マーカ320(あるいは選択的に複数のマーカ、図示せず)を担持する、近位端262aと遠位端262bを有するシャフト262を具える。送達デバイス260は、シャフト262の近位端及び遠位端262a、262bの間に延在するルーメン264と、シャフト262内を摺動可能であって、ルーメン264から図23A乃至23Dに記載のマーカ320を送達する押出部材266を具える。図に示すように、シャフト262の遠位端262bは、斜めになっており、及び/又は、とがっており、シャフト262を組織を通って直接導入することができる。代替的に、送達デバイス260は、例えば、本明細書に記載されているような、組織を通って配置されているカニューレ、シース、あるいはその他の筒状部材(図示せず)を通して導入するようにしても良い。選択的に、遠位端262bは、例えば、放射線不透過性、音波を発生する材料、あるいはその他の材料でできた、バンド又はその他の構造を具えていても良く、これによって、本明細書に記載されているように、導入中に遠位端262bを容易にモニタすることができる。
【0104】
図29Aに示すように、押出部材266は、マーカ320近傍のルーメン264内に配置した遠位端267と、この遠位端267を前進させてルーメン264からマーカ320を押し出すプランジャ又はその他のアクチュエータ268を具える。図29Bに示すように、送達デバイス260の遠位端264が組織40内の所望の位置に前進すると、シャフト262がプランジャ268に対して後退して、マーカ320を順次ルーメン264から押し出す。代替的に、トリガ装置あるいはその他の自動アクチュエータ(図示せず)をシャフト262の近位端262aに設けて、遠位端262bからマーカ320を送達するようにしても良い。
【0105】
図26A乃至26Cを参照すると、マーカ320’’の代替の実施例が示されており、これは、図23A乃至23Dに示すマーカ320とほぼ同じであり、例えば、複数のビーズ324’’を担持するコアワイヤ322’’を具える。しかしながら、マーカ320と異なり、コアワイヤ322’’はらせん形状になるようバイアスがかかっており、例えば、マーカ320’’は図に示すようならせん構造にバイアスされている。従って、マーカ320’’は、例えば、図29A及び29Bに示す送達デバイス260などの送達デバイスへの装填を容易にするために、真っ直ぐにすることができ、更に、らせん構造に弾性的に戻るようにバイアスを掛けることができる。
【0106】
代替の実施例では、マーカ320、320’、又は320’’のいずれも、少なくとも部分的に形状記憶材料で形成することができ、例えば、ターゲット温度に温められるとマーカがバイアスされて所望の形状を取るようにしても良い。例えば、図24のマーカ320を参照すると、コアワイヤ322が、例えばニチノールなどの形状記憶材料で形成されており、コアワイヤ322は、例えば20℃又はそれ以下、といった周囲温度で、あるいはそれより低い温度でマルテンサイト状態になり、例えば、37℃又はそれ以上、といった体温又はそれ以上の温度でオーステナイト状態になる。マルテンサイト状態では、コアワイヤ322は比較的柔らかく可鍛性であり、例えばマーカ320が真っ直ぐにされ、図29A及び29Bの送達デバイス260に装填されても良い。コアワイヤ322の形状記憶は、コアワイヤ322がターゲット温度に温められると、コアワイヤ322が波形、らせん、あるいはその他の非直線形状にバイアスされるように、その材料が温度設定、あるいはプログラムされている。従って、マーカ320は、マルテンサイト状態にある間に、曲げられている、直線状である、あるいは所望の展開形状から変形されている場合でも、マーカ320は、一旦患者の身体に導入されると、あるいはターゲット温度に温められると、自動的に、展開構造を取るようにバイアスされる。
【0107】
図27A乃至27Cを参照すると、マーカ420の別の例示的実施例が示されている。マーカ320と同様に、マーカ420は、複数のビーズ又はセグメント424を担持するコアワイヤ422を具える。各ビーズ424は、本明細書に記載されているように、例えば、プローブ(図示せず)からの信号の反射を強化する、複数の溝424cを具える。コアワイヤ422とビーズ424は、上述の実施例と同様に製造し組み立てることができ、例えば、ビーズ424は、自在に回転するか、あるいはコアワイヤ422に固定されている。溝424cは、上述の実施例と同様に、各ビーズ424に全体的に形成しても良く、あるいは、隣接するビーズ(図示せず)の協動面によって規定されていても良い。溝424cは、ほぼ平坦な面あるいは曲面を規定していても良く、これらの面は、レーダー検出を強化する角部を規定する急峻なエッジで合致している。
【0108】
選択的に、図28A乃至28Cに示すように、球形マーカ520、520’、520’’の代替実施例が示されており、これらのマーカは、形状及び/又は構造が異なる溝524c、524c’、524c’’を具える。溝524c、524c’、524c’’は、実質的に互いに異なる反射信号を生成し、上述した通り、例えば、プローブのプロセッサが様々な反射信号に基づいて異なるマーカを区別できるようにしている。図28A乃至28Cに示す実施例では、マーカ520、520’、520’’が、単一ピース材でできており、コアワイヤと複数ビーズを具えていない。所望であれば、マーカ520、520’、520’’にコアワイヤと複数ビーズを設けること、及び/又は、図27A乃至27Cのマーカ420を、所望であれば、単一ピース材で形成できることは明白である。
【0109】
図30A乃至31Bを参照すると、送達デバイス360の別の実施例が示されており、これは、図23A乃至23Dに示すマーカ320などのマーカ320の送達に使用されるが、代替的に本明細書に記載のいずれのマーカであっても良い。一般的に、送達デバイス360は、例えば、胸部41内といった、ターゲット組織領域に組織を通って導入するサイズの針又は、近位端362aと遠位端362bを具えるその他の通常シャフト362と、近位端及び遠位端362a、362bの間に延在するルーメン364とを具える。送達デバイス360も、シャフト362内を摺動可能で、ルーメン364からマーカ320を送達する押出部材366を具える。図に示すように、シャフト362の遠位端362bは、斜めになる及び/又はとがっており、シャフト362を組織を通って直接導入することができる。代替的に、送達デバイス360は、例えば、本明細書に記載されているような、組織を通って配置されているカニューレ、シース、あるいはその他の筒状部材(図示せず)を通して導入するようにしても良い。選択的に、遠位端362bは、例えば、放射線不透過性、音波を発生する材料、あるいはその他の材料でできた、バンド又はその他の構造を具えていても良く、これによって、本明細書に記載されているように、導入中に、例えば、やはり本明細書に記載されているような、X線又は超音波撮像を用いて、遠位端362bを容易にモニタすることができる。
【0110】
図30B及び31Bに示すように、押出部材366は、例えば、図30Bに示すように、ルーメン364内の最初はマーカ320近傍に配置された、遠位端367を具えている。押出部材366は、送達デバイス360のハンドル370に対してほぼ固定されており、一方、シャフト362は、以下に更に述べるように、例えば、マーカ320を露出させるために、後退させることができる。例えば、図30Bに示すように、押し出し部材366の近位端366aは、ハンドル370内に装填されている押出ホルダ372に固定することができる。
【0111】
シャフト362は、シャフトホルダ374に連結されており、このホルダはハンドル370内で摺動可能である。例えば、シャフトホルダ374は、図30Bに示す、第1の位置又は遠位位置から、図31Bに示す第2の位置又は近位位置へ、軸方向に摺動可能である。従って、第1の位置にあるシャフトホルダ374で、押出部材366の遠位端367がシャフト362の遠位端362bから近位側へずれて、これによって、図30Bに示すように、シャフトルーメン364内にマーカ320を受けるのに十分なスペースを提供している。シャフトホルダ374が第2の位置に向けられると、図31Bに示すように、シャフト362が、シャフト362の遠位端362bが、押出部材366の遠位端367近傍に配置されるまで後退する。押出部材366の遠位端367は、このシャフト362の後退の間にマーカ320が近位に移動しないようにして、図33及び33Aに示すように、マーカ320がシャフト362のルーメン364から連続的に展開するようにする。
【0112】
シャフトホルダ372及びシャフト362は、第2の位置にバイアスされているが、選択的に、第1の位置に残して、例えば、送達デバイス360を用いてマーカ320をそこに装填して送達するようにしても良い。例えば、図30B及び31Bに示すように、ハンドル370は、ハウジング内の溝378で受けて、シャフトホルダ374に隣接しているばねあるいはその他の機構を具えていても良い。第1の位置では、ばね376は、図30Bに示すように圧縮されており、第2の位置では、ばね376は、図31Bに示すように弛緩しているか、あるいは、位置エネルギィが低い状態にある。
【0113】
ハンドル370は、第1の位置においてシャフトホルダ374とシャフト362を選択的に保持し、開放するアクチュエータを具える。例えば、図30Bに示すように、第1の位置にあるシャフトホルダ374で、シャフトホルダ374の近位端374aが押出ホルダ372の遠位端372aに隣接するか、これと係合するまで、シャフトホルダ374がハンドル370内で回転する。代替的に、ハンドル370は、シャフトホルダ374に第1の位置で選択的に係合する一又はそれ以上のその他の構造(図示せず)を具えていても良い。図31Bに示すように、シャフトホルダ374がハンドル370内で回転して、押出ホルダ372の遠位端372aから近位端374aの係合が解かれると、近位端372aは、ハンドル370内を近位側に自在に移動することができる。このように、シャフトホルダ374が回転すると、ばね376が自動的にシャフトホルダ374を近位側に向け、これによって、マーカ320が展開する。前進位置においてシャフト362を開放可能に固定し、アクチュエータが作動するときにシャフト362を自動的に後退させる、たとえば、開放可能な戻り止め又はロック、といったその他のアクチュエータを、ハンドル370及び/又はシャフトホルダ374に設けることは、自明である。
【0114】
図32及び33を参照すると、上述の実施例と同様に、送達デバイス360を用いて、例えば、一又はそれ以上の病変部142を含むターゲット組織領域内の、胸部40又はその他の組織構造内へマーカ320を送達することができる。マーカ320が送達されると、例えば、本明細書に記載のいずれかのシステム及び方法で、マーカ320を用いてターゲット組織領域を位置決めすることができる。
【0115】
図35を参照すると、マーカデバイス610の更に別の実施例が示されており、これは、テザー又はその他の細長いエレメント630に連結されたマーカ620を具える。テザー630は、例えば、生体吸収性材料あるいは非生体吸収性材料で形成した縫合糸、例えば、柔軟な材料、硬質材料、あるいは可鍛性材料で形成したワイヤ、その他であってもよく、マーカがターゲット組織領域へ導入されるときに、患者の身体を伸ばすのに十分な長さを有している。マーカ620は、図34A及び34Bに示すマーカ320’’’あるいは本明細書に記載されているその他の実施例と同様であり、例えば本明細書に記載の位置決めワイヤと同様に、テザー630の遠位端634に開放可能に、あるいは実質的に永久的に取り付けることができる。マーカ620から延在する細長いテザー630は、組織内にインプラントする時、マーカ620の位置の追加の基準を提供する。例えば、テザー630は、腫瘍除去手術を行う間に、外科医をマーカ620の正しい位置にガイドして、及び/又は、除去した腫瘍体積内のマーカ620の存在を解析する。テザー630はまた、ターゲット組織内のマーカ620の方向を同定する助けとなるタグを配置するのに使用することができ、所望であれば、適所に残す、あるいは除去してしまっても良い。
【0116】
図36乃至41を参照すると、例えば、胸部41内の触診不可能な病変部142内にマーカ620をインプラントするなど、ターゲット組織領域内にマーカデバイス610をインプラントするための送達デバイス660と方法が示されている。上述の実施例と同様に、送達デバイス660は、例えば胸部41などのターゲット組織領域へ組織を通って導入するサイズの近位端262aと遠位端262bを有し、マーカデバイス610を担持するシャフト262を具える。送達デバイス660は、シャフト662の近位端662aと遠位端662bの間に少なくとも部分的に延在するルーメン664と、シャフト662内でルーメン664からマーカ620を送達するために摺動可能である押出部材666を具える。図に示すように、シャフト662の遠位端662bは斜めになる、及び/又はとがっており、シャフト662が組織を通って直接導入されるようになっている。代替的に、送達デバイス660は、例えば、本明細書に記載されているような、組織を通って配置されているカニューレ、シース、あるいはその他の筒状部材(図示せず)を通して導入するようにしても良い。選択的に、遠位端662bは、例えば、放射線不透過性、音波を発生する材料、あるいはその他の材料でできた、バンド又はその他の構造を具えていても良く、これによって、導入中に、やはり本明細書に記載されているように、遠位端662bを容易にモニタすることができる。
【0117】
図36に示すように、押出部材666は、それを通ってテザー630を摺動可能に受けるルーメン667を具える。従って、製造中又は使用前には、マーカデバイス610を送達デバイス660に装填して、マーカ620がルーメン664内で遠位端662b近傍に配置され、テザー630が押出部材666のルーメン667を通って延在し、押出部材666に連結されているプランジャ668から出るようになっている。マーカ620が、らせんあるいはその他の形状のバイアスされている場合、マーカ620は、図36に示すようにシャフト662に装填する際に真っ直ぐにすることができる。マーカデバイス610は、腫瘍摘出手術の前に、あるいは、生検を行う時にインプラントしてワイヤ位置決め手順を置き換えることができる。代替的に、マーカデバイス610は、コアニードル生検機器又は真空コアニードルシステム(図示せず)を介して送達することができる。
【0118】
例えば、図36に示すように、手術中に、遠位端662bを例えば病変部142などのターゲット組織領域内へ組織を介して挿入することができる。送達デバイス660の遠位端662bを組織内の所望の位置に前進させると、シャフト662は、図37に示すように、押出部材666に連結されたプランジャ668に対してルーメン664から後退して、マーカ620を送達する。図に示すように、マーカ620は、展開すると自動的に及び/又は弾性的に形状が変わり、図37に示すテーパの付いたらせん形状に戻る。図38を参照すると、送達デバイス660が患者の身体から取り出されて、例えば病変部142などのターゲット組織領域内にマーカ620を残す。テザー630は、例えば、図39に示すように、端部が胸部41から露出されるまで押出部材666を通って単純にスライドする。
【0119】
選択的に、図40に示すように、テザー630をマーカ620から切り離して、マーカ620を病変部142内の適所に置くことができる。例えば、テザー630は、マーカ620のすぐ隣に、所定の張力を与えると破壊されるぜい弱領域(図示せず)を具えていても良い。代替的に、テザー630は、マーカ620から切り離すことができるネジ山の付いた遠位端634あるいはその他のコネクタを具え、例えば、テザー630を回転させて遠位端634のねじを緩めてマーカ620から外すことができる。代替的に、テザー630は、次の腫瘍手術あるいはその他の手順を行う間、マーカ620に付けたままでも良い。
【0120】
図42を参照すると、マーカデバイス610’の別の例示的実施例が示されており、これは、マーカデバイス610と概ね同じである。すなわち、テザー630とマーカ620’を具える。しかしながら、マーカ620’は、図41A及び41Bに示すマーカ320’’’’と同じであっても良い。図43乃至46は、送達デバイス620’と、マーカデバイス610’をインプラントする方法の例示的実施例を示す図であり、これらは図36乃至40に記載のものと概ね同じである。
【0121】
本明細書に記載のシステム及び方法は、胸部の病変に関するものであるが、一又はそれ以上のマーカ又はターゲットを患者の身体のその他の領域にインプラントあるいは導入して、上述のプローブ30のようなプローブを用いて続いて位置決めを行うことができる。例えば、一又はそれ以上のターゲットを、続いて位置決めを行う、胆管、大腿動脈又は静脈、卵管、あるいはその他の身体ルーメン内あるいは近傍に配置することができる。このターゲットは、カテーテル、ワイヤ、あるいはその他の送達デバイスによって、アクセス部位から身体ルーメンのルーメン内に運び、例えば、カテーテル又はワイヤを固定することによって、あるいはマーカを身体ルーメンの壁又は身体ルーメン内にアンカで止めることによって、そこに固定することができる。
【0122】
例えば、図47は、一又はそれ以上の診断及び/又は治療を実行する患者の胃腸管3を示している。図に示すように、マーカ2を担持しているカテーテル1を、例えば、口又は直腸を介して患者のGI管3に導入することができる。図48に見られるように、カテーテル1は、例えば、本明細書に記載したその他のマーカと同様の、マーカ2を具えている。例えば、マーカ2は図23A乃至23Cに示し、上述した一又はそれ以上のビーズ320と同様の構造を具えている。カテーテル1及びマーカ2は、例えば、蛍光透視法、超音波あるいはその他の外部撮像を用いて、GI管3内の所望の位置に進めることができる。
【0123】
次いで、本明細書に記載したプローブのようなプローブを用いてマーカ2を位置決めし、これによって、GI管3内の位置を決める。その他の身体ルーメンを同様に位置決めして、例えば、患者の身体の外から最小侵襲法で、身体ルーメンへのアクセスを容易にすることは自明である。例えば、図49に示すように、マーカ2を用いてGI管3内の特定の位置を位置決めして、身体ルーメンの壁の穿刺を容易にして身体ルーメンをその中に入れて、身体ルーメンをクリップしたり、切断したり、結紮したり、閉じたり、などを行う。図49は、例えば、従来の腹腔鏡手術で、息を吸い込んだ腹部4を示す断面図である。本明細書に記載のプローブと同様のプローブ5を、アクセスカニューレ6に挿入して、カテーテル1上のマーカ2の位置をスキャンする及び/又は検出することができる。次いで、腹腔鏡7を用いて、マーカ2に対するプローブ5の位置を視覚化する。マーカ2を位置決めしたら、アクセスシース8を用いて、所望の位置にあるGI管3へのアクセスを進めて、例えば一又はそれ以上の診断及び/又は治療手順を実行する。所望の通り、アクセスが完了したら、あるいはこの手順が完了した後、マーカ2とカテーテル1を取り出す。
【0124】
例示的な実施例では、カテーテルを用いてマーカを卵管に導入し、次いで針又はその他のデバイスを最小侵襲法で導入し、例えばマーカの上の患者の皮膚と組織を通って穿刺を行い、卵管にアクセスして、例えば、卵管を結紮する、焼灼する、あるいは切る又は閉じる。代替的に、マーカが胆管に配置されると、プローブ30の案内により内視鏡アクセスを用いて胆管にアクセスして、例えば、患者の腸内で手術を行う。更なる代替では、マーカを、摘出の目的である長さの大腿動脈、あるいはその他の静脈、と連通する枝部に配置して、プローブ30を用いて、血管の外の各枝部を特定し、例えば、各枝部を切る、結紮する、焼灼する、及び/又は、分離して、この長さの血管を隣接する血管から分離して摘出することができる。
【0125】
更なる代替例では、一又はそれ以上のマーカをターゲット組織構造内にインプラントして、本明細書に述べたシステムを用いて治療の位置決めを行うことができる。例えば、マーカは、インプラントされているターゲット組織領域内あるいはその周囲に、延長した時間を超えて放出される一又はそれ以上の薬剤、放射性材料、あるいはその他の治療用物質を担持することができる。十分な時間が経過した後、例えば、治療用物質がほぼ完全になくなった、あるいは十分に送達された後、プローブ30を用いてマーカを位置決めし、例えば、最小侵襲法で、マーカを容易に再生する、及び/又は取り除くようにする。
【0126】
本発明は、様々な変形及び代替が可能であり、特別な例を図面にして、詳細を個々に述べている。しかし、本発明は、個々に開示した特定の形あるいは方法に限定されるものではなく、逆に、特許請求の範囲に入るすべての変形例、均等物、及び代替例をカバーしていると解されるべきである。
【特許請求の範囲】
【請求項1】
患者の身体内のターゲット組織領域を位置決めするシステムにおいて:
患者の身体へ電磁信号を送信し、当該患者の身体からの反射信号を受信する一又はそれ以上のアンテナを具え、前記反射信号を分析して前記患者の身体内の一又はそれ以上の物体を同定するプローブと;
患者の身体内にインプラントするサイズのマーカであって、前記プローブによる前記マーカの同定を強化する能動反射器を具えるマーカと;
を具えることを特徴とするシステム。
【請求項2】
請求項1に記載のシステムにおいて、前記マーカが細長いテザーを具えることを特徴とするシステム。
【請求項3】
請求項1又は2に記載のシステムにおいて、前記マーカが細長いコア部材によって担持される複数のビーズを具え、当該ビーズが前記プローブからの信号の反射を強化して、前記マーカの同定を容易にするように構成されていることを特徴とするシステム。
【請求項4】
請求項1乃至3のいずれか1項に記載のシステムにおいて、前記ビーズの一又はそれ以上に所定の表面仕上げがなされており、当該一又はそれ以上のビーズから反射された信号を変調して、前記マーカの同定を強化することを特徴とするシステム。
【請求項5】
請求項1乃至4のいずれか1項に記載のシステムにおいて、前記マーカが、当該マーカに当たる前記プローブからの入射信号を、前記マーカからの反射信号を前記プローブによる同定を強化するように変調する電子回路を具えることを特徴とするシステム。
【請求項6】
請求項5に記載のシステムにおいて、前記電子回路が前記反射信号を位相シフトさせ、前記プローブが当該位相シフトを同定して、前記患者の身体内のその他の物体から前記マーカを区別するように構成されていることを特徴とするシステム。
【請求項7】
請求項5に記載のシステムにおいて、前記プローブが超広域帯(UWB)信号を送信するように構成されており、前記電子回路が当該UWBを変調して、前記反射信号が比較的狭い帯域を有するようにすることを特徴とするシステム。
【請求項8】
請求項1乃至7のいずれか1項に記載のシステムにおいて、前記マーカが、当該マーカのレーダー断面(RCS)を強化して前記プローブによる前記マーカの同定を強化するように構成されていることを特徴とするシステム。
【請求項9】
請求項1乃至8のいずれか1項に記載のシステムにおいて、前記マーカが非直線形状であるが、弾性的にフレキシブルであり、前記コア部材が真っ直ぐになってターゲット組織領域への前記マーカの導入を容易にするようにバイアスされていることを特徴とするシステム。
【請求項10】
請求項1乃至9のいずれか1項に記載のシステムが更に、患者の身体内へ前記マーカを導入する送達デバイスを具えることを特徴とするシステム。
【請求項11】
請求項10に記載のシステムにおいて、前記送達デバイスが針とカニューレのうちの一方を具えることを特徴とするシステム。
【請求項12】
患者の身体内のターゲット組織領域の位置決め用マーカにおいて:
細長いコア部材と;
当該コア部材に連結した複数のビーズであって、電磁信号の反射を強化して前記マーカの同定を容易にする複数の面とエッジを具えるビーズと;
を具えることを特徴とするマーカ。
【請求項13】
請求項12に記載のマーカが更に、前記ビーズ又は前記コア部材の一方によって担持される電子回路を具え、当該電子回路が、前記マーカに当たる電磁信号を、反射した信号が前記マーカの同定を強化するように変調するよう構成されていることを特徴とするマーカ。
【請求項14】
請求項12又は13に記載のマーカにおいて、前記コア部材が非直線形状であるが、弾性的にフレキシブルであり、前記コア部材が真っ直ぐになってターゲット組織領域への前記コア部材の導入を容易にするようにバイアスされていることを特徴とするマーカ。
【請求項15】
請求項14に記載のマーカにおいて、前記コア部材がらせん形状にバイアスされていることを特徴とするマーカ。
【請求項16】
請求項15に記載のマーカにおいて、前記コア部材がテーパ付きらせん形状にバイアスされていることを特徴とするマーカ。
【請求項17】
請求項12乃至16のいずれか1項に記載のマーカが更に、前記ビーズ又は前記コアワイヤの一方から延在する細長テザーを具えることを特徴とするマーカ。
【請求項18】
請求項17に記載のマーカにおいて、前記細長テザーが前記ビーズ又は前記コアワイヤの一方に開放可能に連結されていることを特徴とするマーカ。
【請求項19】
患者の身体内のターゲット組織領域の位置決めシステムにおいて:
請求項12乃至18のいずれか1項に記載のマーカと;
患者の身体内に電子信号を送信し、当該患者の身体からの反射信号を受信する一又はそれ以上のアンテナを具え、前記反射信号を分析して前記患者の身体内にインプラントした後の前記マーカを同定するプローブと;
を具えることを特徴とするシステム。
【請求項20】
患者の身体内のターゲット組織領域の位置決めシステムにおいて:
患者の身体内に電子信号を送信し、当該患者の身体からの反射信号を受信する一又はそれ以上のアンテナを具え、前記反射信号を分析して前記患者の身体内の一又はそれ以上の物体を同定するプローブと;
患者の身体内にインプラントするサイズのマーカであって、前記プローブによる前記マーカの同定を強化する能動トランスポンダを具えるマーカと;
を具えることを特徴とするシステム。
【請求項21】
患者の身体内のターゲット組織領域の位置決めシステムにおいて:
近位端と遠位端を具えるシャフトと、前記遠位端の上のターゲットを具える位置決めワイヤと;
電子信号を送受信する一又はそれ以上のアンテナを具え、前記位置決めワイヤがターゲット組織領域内に導入され、前記プローブが前記ターゲット組織領域近傍に配置されたときに、前記ターゲットを検出するプローブと;
を具えることを特徴とするシステム。
【請求項22】
請求項21に記載のシステムにおいて、前記ターゲットが、前記プローブからの電磁信号の反射を強化する一又はそれ以上の特徴を具えることを特徴とするシステム。
【請求項23】
請求項21又は22に記載のシステムにおいて、前記ターゲットが幾何学的形状を具えることを特徴とするシステム。
【請求項24】
請求項21乃至23のいずれか1項に記載のシステムが更に、前記シャフトの遠位端に一又はそれ以上のアンカリング要素を具えることを特徴とするシステム。
【請求項25】
請求項24に記載のシステムにおいて、前記一又はそれ以上のアンカリング要素が圧縮可能であり、組織を介して遠位側に前記位置決めワイヤを挿入可能であると共に、拡張可能であり、組織を介して続いて近位側に取り外すことを防止することを特徴とするシステム。
【請求項26】
請求項1乃至25のいずれか1項に記載のシステムにおいて、前記プローブが前記プローブに対する前記ターゲットの空間的関係に基づいて空間情報を提供する出力デバイスを具えることを特徴とするシステム。
【請求項27】
請求項26に記載のシステムにおいて、前記出力デバイスがディスプレイを具えることを特徴とするシステム。
【請求項28】
請求項26に記載のシステムにおいて、前記空間情報が組織に対して配置され、前記ターゲットの方向を向いている前記プローブの端部からの距離を具えることを特徴とするシステム。
【請求項29】
請求項1乃至28のいずれか1項に記載のシステムにおいて、前記プローブがプロセッサを具え、当該プロセッサが、前記一又はそれ以上のアンテナを用いて取得したデータから前記ターゲットを自動的に同定し、前記プローブに対する前記ターゲットの空間的関係に基づいて空間情報を決定するように構成されていることを特徴とするシステム。
【請求項30】
請求項1乃至29のいずれか1項に記載のシステムにおいて、前記プローブが患者の身体の組織に対して配置されるよう構成された第1の端部を有する可搬デバイスを具え、これによって、前記一又はそれ以上のアンテナを前記患者の身体内の組織に向けることを特徴とするシステム。
【請求項31】
患者の身体内のターゲット組織領域の位置決めシステムにおいて:
患者の身体内の組織を介して導入するサイズの近位端と遠位端を具えるシャフトを具える送達デバイスであって、前記ターゲット組織領域内又は周囲にインプラント可能な一又はそれ以上のマーカを担持する送達デバイスと;
電磁信号を送受信する一又はそれ以上のアンテナを具え、前記プローブが前記ターゲット組織領域近傍に配置されたときに、前記ターゲット内又は周囲にインプラントされた一又はそれ以上のマーカを検出するプローブと;
を具えることを特徴とするシステム。
【請求項32】
請求項31に記載のシステムにおいて、前記送達デバイスが前記ターゲット組織領域内又は周囲の複数のマーカを順次送達するように構成されていることを特徴とするシステム。
【請求項33】
請求項31又は32に記載のシステムにおいて、前記マーカが、前記プローブからの電磁信号の反射を強化する一又はそれ以上の特徴を具えていることを特徴とするシステム。
【請求項34】
請求項31乃至33のいずれか1項に記載のシステムにおいて、前記各マーカが幾何学的形状を具えることを特徴とするシステム。
【請求項35】
患者の身体内のターゲット組織領域を位置決めする方法において:
前記ターゲット組織領域へ胸部組織を通ってターゲットを導入するステップと;
前記ターゲット組織領域近傍にプローブを配置するステップであって、当該プローブが前記ターゲット組織領域に向けて電磁信号を送信し、前記ターゲットから反射した電磁信号を受信し、前記ターゲットと前記プローブ間の空間的関係を提供する空間情報を表示するステップと;
を具え、
前記ターゲットが前記ターゲットに当たる前記プローブからの信号を変調して、反射信号が前記プローブによる前記ターゲットの同定を強化する;
ことを特徴とする方法。
【請求項36】
患者の身体内のターゲット組織領域を位置決めする方法において:
前記ターゲット組織領域内へターゲットを導入するステップと;
前記ターゲット組織領域近傍にプローブを配置するステップと;
前記プローブを作動させて、作動時に当該プローブが前記ターゲット組織領域に向けて電磁信号を送信し、前記ターゲットから反射された電磁信号を受信し、前記ターゲットと前記プローブとの間の空間的関係を提供する空間情報を表示する、ステップと;
を具えることを特徴とする方法。
【請求項37】
請求項36に記載の方法において、前記空間情報が、前記ターゲットと前記プローブ間の距離を含むことを特徴とする方法。
【請求項38】
請求項36又は37に記載の方法において、前記空間情報が、前記ターゲットと前記プローブ間の相対角度方向を含むことを特徴とする方法。
【請求項39】
請求項36乃至38のいずれか1項に記載の方法において、ターゲットを導入するステップが、前記組織を通って前記ターゲット組織領域へ位置決めワイヤを前進させるステップを具え、前記位置決めワイヤが前記ターゲットを担持していることを特徴とする方法。
【請求項40】
請求項36乃至39のいずれか1項に記載の方法において、ターゲットを導入するステップが、前記ターゲット組織領域内に複数のマーカをインプラントするステップを具えることを特徴とする方法。
【請求項41】
請求項36乃至40のいずれか1項に記載の方法において、前記ターゲット組織領域が、病変を有する患者の胸部内の領域を具えることを特徴とする方法。
【請求項42】
請求項41に記載の方法において、前記ターゲットが前記病変に導入されることを特徴とする方法。
【請求項43】
請求項41に記載の方法において、前記ターゲットが、前記病変から離れている前記ターゲット組織領域へ導入される第1のマーカを具え、前記ターゲット組織領域から検体除去用の所望のマージンを規定することを特徴とする方法。
【請求項44】
請求項43に記載の方法が更に、前記病変及び前記第1のマーカから離れている前記ターゲット組織領域へ第2のマーカを導入して、前記所望のマージンを更に規定するステップを具えることを特徴とする方法。
【請求項45】
請求項43又は44に記載の方法が更に、複数の追加のマーカを前記ターゲット組織領域へ前記病変を少なくとも部分的に囲むように導入するステップを具え、前記追加のマーカが前記病変から離れて前記所望のマージンを更に規定することを特徴とする方法。
【請求項46】
請求項41乃至45のいずれか1項に記載の方法が更に、前記ターゲット組織領域から組織検体を除去するステップであって、当該組織検体が病変と前記ターゲットを含むことを特徴とする方法。
【請求項47】
請求項36乃至40のいずれか1項に記載の方法において、前記ターゲット組織領域が身体ルーメンを具え、前記ターゲットが前記身体ルーメン内に管腔内に導入されることを特徴とする方法。
【請求項48】
請求項47に記載の方法において、前記空間的関係を用いて、前記身体ルーメンに最小侵襲法でアクセスすることを特徴とする方法。
【請求項49】
請求項48に記載の方法において、前記身体ルーメンを焼灼する、結紮する、切る、あるいは閉じる、のうちの一つのために、前記身体ルーメンにアクセスすることを特徴とする方法。
【請求項50】
請求項36乃至46のいずれか1項に記載の方法において、前記ターゲットが介在組織を通って前記ターゲット組織領域へ導入されることを特徴とする方法。
【請求項51】
患者の胸部のターゲット組織領域内の病変を除去する方法において:
胸部組織を通って前記ターゲット組織領域へターゲットを導入するステップと;
前記ターゲット組織領域近傍にプローブを配置して、当該プローブが前記ターゲット組織領域へ電磁信号を送信し、前記ターゲットから反射した電磁信号を受信し、前記ターゲットと前記プローブの空間的関係を提供する空間情報を表示するステップと;
前記ターゲット組織領域から組織検体を除去するステップであって、当該組織検体が前記病変と前記ターゲットを含む、ステップと;
を具えることを特徴とする方法。
【請求項52】
患者の胸部のターゲット組織領域内の病変を除去する方法において:
胸部組織を通って前記ターゲット組織領域へターゲットを導入するステップと;
前記ターゲット組織領域近傍の患者の皮膚に対してプローブを配置するステップであって、前記プローブが前記ターゲット組織領域へ電磁信号を送信し、前記ターゲットから反射した電磁信号を受信するステップと;
前記プローブを用いて前記病変周囲の前記ターゲット組織領域内の所望のマージンを決定するステップと;
前記ターゲット組織領域から組織検体を除去するステップであって、前記組織検体が前記所望のマージンによって規定され、前記病変と前記ターゲットを含む、ステップと;
を具えることを特徴とする方法。
【請求項53】
患者の身体内のターゲット組織領域を位置決めする方法において:
三次元アレイ内の複数のターゲットを前記ターゲット組織領域内又は周囲に導入するステップと;
プローブを前記ターゲット組織領域近傍に配置するステップと;
前記プローブを作動させて、作動時に当該プローブが前記ターゲット組織領域に向けて電磁信号を送信し、前記ターゲットから反射された電磁信号を受信し、前記ターゲットと前記プローブとの間の空間的関係を提供する空間情報を表示する、ステップと;
を具えることを特徴とする方法。
【請求項54】
請求項53に記載の方法において、前記各ターゲットが、前記ターゲットを互いに区別する一又はそれ以上の特徴を具え、前記プローブが特定のターゲットと前記プローブとの間の空間的関係を提供する空間情報を表示することを特徴とする方法。
【請求項55】
ターゲット組織領域内へ一又はそれ以上の治療物質を送達する方法において:
前記ターゲット組織領域にターゲットを導入するステップであって、当該ターゲットが前記ターゲット組織領域を治療する一又はそれ以上の治療物質を担持しているステップと;
前記ターゲット組織領域近傍の前記患者の皮膚に対してプローブを配置するステップであって、当該プローブが前記ターゲット組織領域に向けて電磁信号を送信し、前記ターゲットから反射された電磁信号を受信するステップと;
前記一又はそれ以上の物質が所望の時間に送達された後、前記プローブによって提供されるガイダンスによって、前記ターゲット組織領域から前記ターゲットを除去するステップと;
を具えることを特徴とする方法。
【請求項1】
患者の身体内のターゲット組織領域を位置決めするシステムにおいて:
患者の身体へ電磁信号を送信し、当該患者の身体からの反射信号を受信する一又はそれ以上のアンテナを具え、前記反射信号を分析して前記患者の身体内の一又はそれ以上の物体を同定するプローブと;
患者の身体内にインプラントするサイズのマーカであって、前記プローブによる前記マーカの同定を強化する能動反射器を具えるマーカと;
を具えることを特徴とするシステム。
【請求項2】
請求項1に記載のシステムにおいて、前記マーカが細長いテザーを具えることを特徴とするシステム。
【請求項3】
請求項1又は2に記載のシステムにおいて、前記マーカが細長いコア部材によって担持される複数のビーズを具え、当該ビーズが前記プローブからの信号の反射を強化して、前記マーカの同定を容易にするように構成されていることを特徴とするシステム。
【請求項4】
請求項1乃至3のいずれか1項に記載のシステムにおいて、前記ビーズの一又はそれ以上に所定の表面仕上げがなされており、当該一又はそれ以上のビーズから反射された信号を変調して、前記マーカの同定を強化することを特徴とするシステム。
【請求項5】
請求項1乃至4のいずれか1項に記載のシステムにおいて、前記マーカが、当該マーカに当たる前記プローブからの入射信号を、前記マーカからの反射信号を前記プローブによる同定を強化するように変調する電子回路を具えることを特徴とするシステム。
【請求項6】
請求項5に記載のシステムにおいて、前記電子回路が前記反射信号を位相シフトさせ、前記プローブが当該位相シフトを同定して、前記患者の身体内のその他の物体から前記マーカを区別するように構成されていることを特徴とするシステム。
【請求項7】
請求項5に記載のシステムにおいて、前記プローブが超広域帯(UWB)信号を送信するように構成されており、前記電子回路が当該UWBを変調して、前記反射信号が比較的狭い帯域を有するようにすることを特徴とするシステム。
【請求項8】
請求項1乃至7のいずれか1項に記載のシステムにおいて、前記マーカが、当該マーカのレーダー断面(RCS)を強化して前記プローブによる前記マーカの同定を強化するように構成されていることを特徴とするシステム。
【請求項9】
請求項1乃至8のいずれか1項に記載のシステムにおいて、前記マーカが非直線形状であるが、弾性的にフレキシブルであり、前記コア部材が真っ直ぐになってターゲット組織領域への前記マーカの導入を容易にするようにバイアスされていることを特徴とするシステム。
【請求項10】
請求項1乃至9のいずれか1項に記載のシステムが更に、患者の身体内へ前記マーカを導入する送達デバイスを具えることを特徴とするシステム。
【請求項11】
請求項10に記載のシステムにおいて、前記送達デバイスが針とカニューレのうちの一方を具えることを特徴とするシステム。
【請求項12】
患者の身体内のターゲット組織領域の位置決め用マーカにおいて:
細長いコア部材と;
当該コア部材に連結した複数のビーズであって、電磁信号の反射を強化して前記マーカの同定を容易にする複数の面とエッジを具えるビーズと;
を具えることを特徴とするマーカ。
【請求項13】
請求項12に記載のマーカが更に、前記ビーズ又は前記コア部材の一方によって担持される電子回路を具え、当該電子回路が、前記マーカに当たる電磁信号を、反射した信号が前記マーカの同定を強化するように変調するよう構成されていることを特徴とするマーカ。
【請求項14】
請求項12又は13に記載のマーカにおいて、前記コア部材が非直線形状であるが、弾性的にフレキシブルであり、前記コア部材が真っ直ぐになってターゲット組織領域への前記コア部材の導入を容易にするようにバイアスされていることを特徴とするマーカ。
【請求項15】
請求項14に記載のマーカにおいて、前記コア部材がらせん形状にバイアスされていることを特徴とするマーカ。
【請求項16】
請求項15に記載のマーカにおいて、前記コア部材がテーパ付きらせん形状にバイアスされていることを特徴とするマーカ。
【請求項17】
請求項12乃至16のいずれか1項に記載のマーカが更に、前記ビーズ又は前記コアワイヤの一方から延在する細長テザーを具えることを特徴とするマーカ。
【請求項18】
請求項17に記載のマーカにおいて、前記細長テザーが前記ビーズ又は前記コアワイヤの一方に開放可能に連結されていることを特徴とするマーカ。
【請求項19】
患者の身体内のターゲット組織領域の位置決めシステムにおいて:
請求項12乃至18のいずれか1項に記載のマーカと;
患者の身体内に電子信号を送信し、当該患者の身体からの反射信号を受信する一又はそれ以上のアンテナを具え、前記反射信号を分析して前記患者の身体内にインプラントした後の前記マーカを同定するプローブと;
を具えることを特徴とするシステム。
【請求項20】
患者の身体内のターゲット組織領域の位置決めシステムにおいて:
患者の身体内に電子信号を送信し、当該患者の身体からの反射信号を受信する一又はそれ以上のアンテナを具え、前記反射信号を分析して前記患者の身体内の一又はそれ以上の物体を同定するプローブと;
患者の身体内にインプラントするサイズのマーカであって、前記プローブによる前記マーカの同定を強化する能動トランスポンダを具えるマーカと;
を具えることを特徴とするシステム。
【請求項21】
患者の身体内のターゲット組織領域の位置決めシステムにおいて:
近位端と遠位端を具えるシャフトと、前記遠位端の上のターゲットを具える位置決めワイヤと;
電子信号を送受信する一又はそれ以上のアンテナを具え、前記位置決めワイヤがターゲット組織領域内に導入され、前記プローブが前記ターゲット組織領域近傍に配置されたときに、前記ターゲットを検出するプローブと;
を具えることを特徴とするシステム。
【請求項22】
請求項21に記載のシステムにおいて、前記ターゲットが、前記プローブからの電磁信号の反射を強化する一又はそれ以上の特徴を具えることを特徴とするシステム。
【請求項23】
請求項21又は22に記載のシステムにおいて、前記ターゲットが幾何学的形状を具えることを特徴とするシステム。
【請求項24】
請求項21乃至23のいずれか1項に記載のシステムが更に、前記シャフトの遠位端に一又はそれ以上のアンカリング要素を具えることを特徴とするシステム。
【請求項25】
請求項24に記載のシステムにおいて、前記一又はそれ以上のアンカリング要素が圧縮可能であり、組織を介して遠位側に前記位置決めワイヤを挿入可能であると共に、拡張可能であり、組織を介して続いて近位側に取り外すことを防止することを特徴とするシステム。
【請求項26】
請求項1乃至25のいずれか1項に記載のシステムにおいて、前記プローブが前記プローブに対する前記ターゲットの空間的関係に基づいて空間情報を提供する出力デバイスを具えることを特徴とするシステム。
【請求項27】
請求項26に記載のシステムにおいて、前記出力デバイスがディスプレイを具えることを特徴とするシステム。
【請求項28】
請求項26に記載のシステムにおいて、前記空間情報が組織に対して配置され、前記ターゲットの方向を向いている前記プローブの端部からの距離を具えることを特徴とするシステム。
【請求項29】
請求項1乃至28のいずれか1項に記載のシステムにおいて、前記プローブがプロセッサを具え、当該プロセッサが、前記一又はそれ以上のアンテナを用いて取得したデータから前記ターゲットを自動的に同定し、前記プローブに対する前記ターゲットの空間的関係に基づいて空間情報を決定するように構成されていることを特徴とするシステム。
【請求項30】
請求項1乃至29のいずれか1項に記載のシステムにおいて、前記プローブが患者の身体の組織に対して配置されるよう構成された第1の端部を有する可搬デバイスを具え、これによって、前記一又はそれ以上のアンテナを前記患者の身体内の組織に向けることを特徴とするシステム。
【請求項31】
患者の身体内のターゲット組織領域の位置決めシステムにおいて:
患者の身体内の組織を介して導入するサイズの近位端と遠位端を具えるシャフトを具える送達デバイスであって、前記ターゲット組織領域内又は周囲にインプラント可能な一又はそれ以上のマーカを担持する送達デバイスと;
電磁信号を送受信する一又はそれ以上のアンテナを具え、前記プローブが前記ターゲット組織領域近傍に配置されたときに、前記ターゲット内又は周囲にインプラントされた一又はそれ以上のマーカを検出するプローブと;
を具えることを特徴とするシステム。
【請求項32】
請求項31に記載のシステムにおいて、前記送達デバイスが前記ターゲット組織領域内又は周囲の複数のマーカを順次送達するように構成されていることを特徴とするシステム。
【請求項33】
請求項31又は32に記載のシステムにおいて、前記マーカが、前記プローブからの電磁信号の反射を強化する一又はそれ以上の特徴を具えていることを特徴とするシステム。
【請求項34】
請求項31乃至33のいずれか1項に記載のシステムにおいて、前記各マーカが幾何学的形状を具えることを特徴とするシステム。
【請求項35】
患者の身体内のターゲット組織領域を位置決めする方法において:
前記ターゲット組織領域へ胸部組織を通ってターゲットを導入するステップと;
前記ターゲット組織領域近傍にプローブを配置するステップであって、当該プローブが前記ターゲット組織領域に向けて電磁信号を送信し、前記ターゲットから反射した電磁信号を受信し、前記ターゲットと前記プローブ間の空間的関係を提供する空間情報を表示するステップと;
を具え、
前記ターゲットが前記ターゲットに当たる前記プローブからの信号を変調して、反射信号が前記プローブによる前記ターゲットの同定を強化する;
ことを特徴とする方法。
【請求項36】
患者の身体内のターゲット組織領域を位置決めする方法において:
前記ターゲット組織領域内へターゲットを導入するステップと;
前記ターゲット組織領域近傍にプローブを配置するステップと;
前記プローブを作動させて、作動時に当該プローブが前記ターゲット組織領域に向けて電磁信号を送信し、前記ターゲットから反射された電磁信号を受信し、前記ターゲットと前記プローブとの間の空間的関係を提供する空間情報を表示する、ステップと;
を具えることを特徴とする方法。
【請求項37】
請求項36に記載の方法において、前記空間情報が、前記ターゲットと前記プローブ間の距離を含むことを特徴とする方法。
【請求項38】
請求項36又は37に記載の方法において、前記空間情報が、前記ターゲットと前記プローブ間の相対角度方向を含むことを特徴とする方法。
【請求項39】
請求項36乃至38のいずれか1項に記載の方法において、ターゲットを導入するステップが、前記組織を通って前記ターゲット組織領域へ位置決めワイヤを前進させるステップを具え、前記位置決めワイヤが前記ターゲットを担持していることを特徴とする方法。
【請求項40】
請求項36乃至39のいずれか1項に記載の方法において、ターゲットを導入するステップが、前記ターゲット組織領域内に複数のマーカをインプラントするステップを具えることを特徴とする方法。
【請求項41】
請求項36乃至40のいずれか1項に記載の方法において、前記ターゲット組織領域が、病変を有する患者の胸部内の領域を具えることを特徴とする方法。
【請求項42】
請求項41に記載の方法において、前記ターゲットが前記病変に導入されることを特徴とする方法。
【請求項43】
請求項41に記載の方法において、前記ターゲットが、前記病変から離れている前記ターゲット組織領域へ導入される第1のマーカを具え、前記ターゲット組織領域から検体除去用の所望のマージンを規定することを特徴とする方法。
【請求項44】
請求項43に記載の方法が更に、前記病変及び前記第1のマーカから離れている前記ターゲット組織領域へ第2のマーカを導入して、前記所望のマージンを更に規定するステップを具えることを特徴とする方法。
【請求項45】
請求項43又は44に記載の方法が更に、複数の追加のマーカを前記ターゲット組織領域へ前記病変を少なくとも部分的に囲むように導入するステップを具え、前記追加のマーカが前記病変から離れて前記所望のマージンを更に規定することを特徴とする方法。
【請求項46】
請求項41乃至45のいずれか1項に記載の方法が更に、前記ターゲット組織領域から組織検体を除去するステップであって、当該組織検体が病変と前記ターゲットを含むことを特徴とする方法。
【請求項47】
請求項36乃至40のいずれか1項に記載の方法において、前記ターゲット組織領域が身体ルーメンを具え、前記ターゲットが前記身体ルーメン内に管腔内に導入されることを特徴とする方法。
【請求項48】
請求項47に記載の方法において、前記空間的関係を用いて、前記身体ルーメンに最小侵襲法でアクセスすることを特徴とする方法。
【請求項49】
請求項48に記載の方法において、前記身体ルーメンを焼灼する、結紮する、切る、あるいは閉じる、のうちの一つのために、前記身体ルーメンにアクセスすることを特徴とする方法。
【請求項50】
請求項36乃至46のいずれか1項に記載の方法において、前記ターゲットが介在組織を通って前記ターゲット組織領域へ導入されることを特徴とする方法。
【請求項51】
患者の胸部のターゲット組織領域内の病変を除去する方法において:
胸部組織を通って前記ターゲット組織領域へターゲットを導入するステップと;
前記ターゲット組織領域近傍にプローブを配置して、当該プローブが前記ターゲット組織領域へ電磁信号を送信し、前記ターゲットから反射した電磁信号を受信し、前記ターゲットと前記プローブの空間的関係を提供する空間情報を表示するステップと;
前記ターゲット組織領域から組織検体を除去するステップであって、当該組織検体が前記病変と前記ターゲットを含む、ステップと;
を具えることを特徴とする方法。
【請求項52】
患者の胸部のターゲット組織領域内の病変を除去する方法において:
胸部組織を通って前記ターゲット組織領域へターゲットを導入するステップと;
前記ターゲット組織領域近傍の患者の皮膚に対してプローブを配置するステップであって、前記プローブが前記ターゲット組織領域へ電磁信号を送信し、前記ターゲットから反射した電磁信号を受信するステップと;
前記プローブを用いて前記病変周囲の前記ターゲット組織領域内の所望のマージンを決定するステップと;
前記ターゲット組織領域から組織検体を除去するステップであって、前記組織検体が前記所望のマージンによって規定され、前記病変と前記ターゲットを含む、ステップと;
を具えることを特徴とする方法。
【請求項53】
患者の身体内のターゲット組織領域を位置決めする方法において:
三次元アレイ内の複数のターゲットを前記ターゲット組織領域内又は周囲に導入するステップと;
プローブを前記ターゲット組織領域近傍に配置するステップと;
前記プローブを作動させて、作動時に当該プローブが前記ターゲット組織領域に向けて電磁信号を送信し、前記ターゲットから反射された電磁信号を受信し、前記ターゲットと前記プローブとの間の空間的関係を提供する空間情報を表示する、ステップと;
を具えることを特徴とする方法。
【請求項54】
請求項53に記載の方法において、前記各ターゲットが、前記ターゲットを互いに区別する一又はそれ以上の特徴を具え、前記プローブが特定のターゲットと前記プローブとの間の空間的関係を提供する空間情報を表示することを特徴とする方法。
【請求項55】
ターゲット組織領域内へ一又はそれ以上の治療物質を送達する方法において:
前記ターゲット組織領域にターゲットを導入するステップであって、当該ターゲットが前記ターゲット組織領域を治療する一又はそれ以上の治療物質を担持しているステップと;
前記ターゲット組織領域近傍の前記患者の皮膚に対してプローブを配置するステップであって、当該プローブが前記ターゲット組織領域に向けて電磁信号を送信し、前記ターゲットから反射された電磁信号を受信するステップと;
前記一又はそれ以上の物質が所望の時間に送達された後、前記プローブによって提供されるガイダンスによって、前記ターゲット組織領域から前記ターゲットを除去するステップと;
を具えることを特徴とする方法。
【図1】


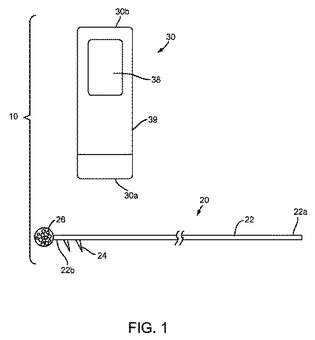
【図2A】
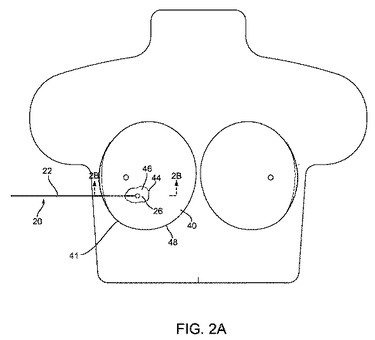
【図2B】
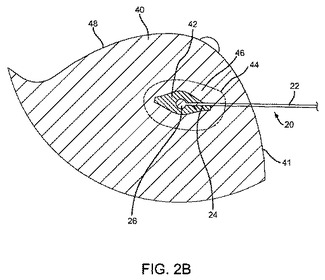
【図3】
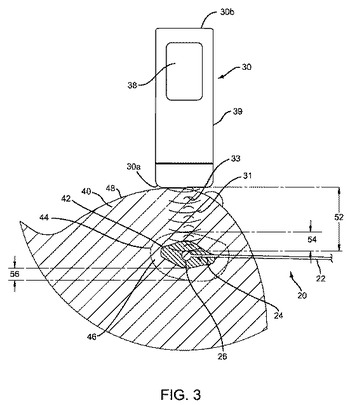
【図4】
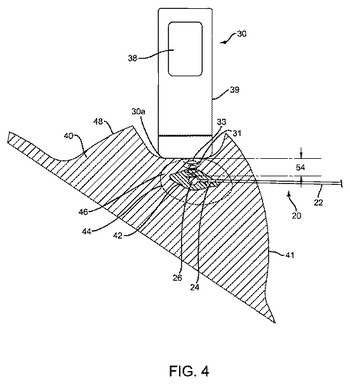
【図5】
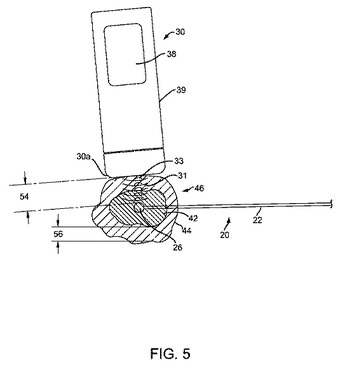
【図6】
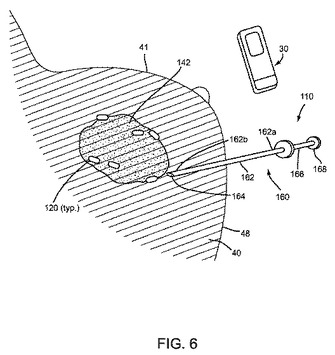
【図7】
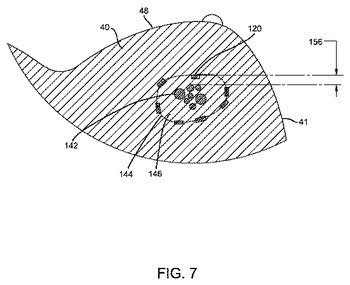
【図8】
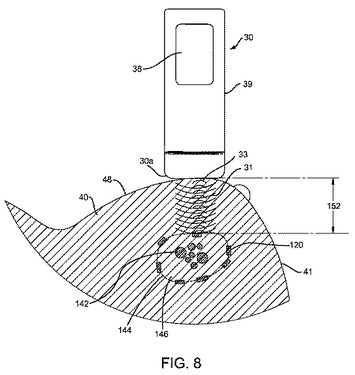
【図9】
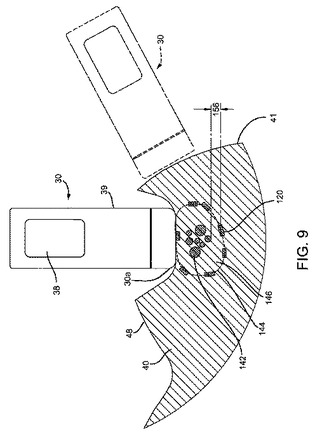
【図10】
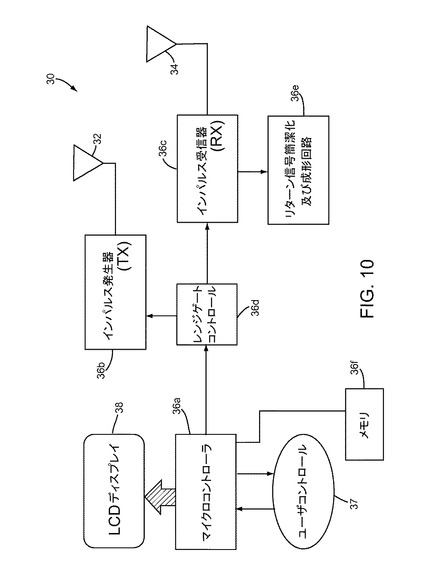
【図10A】
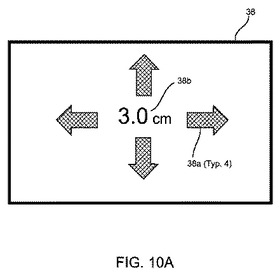
【図10B】
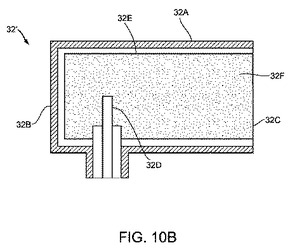
【図11】
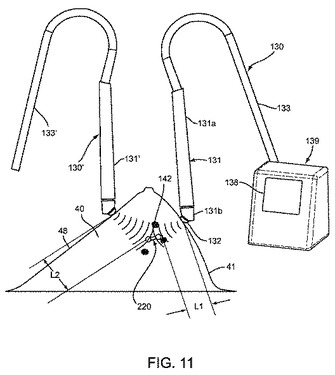
【図12】
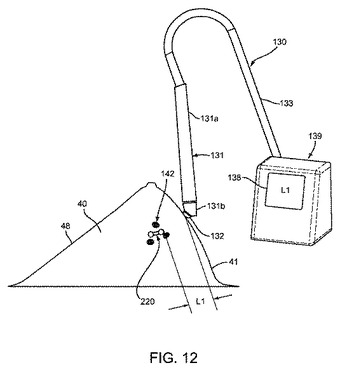
【図13】
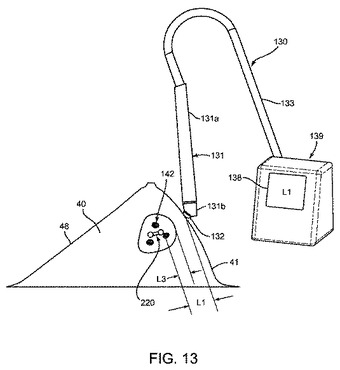
【図14−14A】
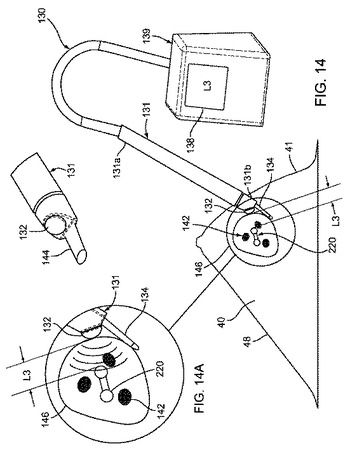
【図15−15A】
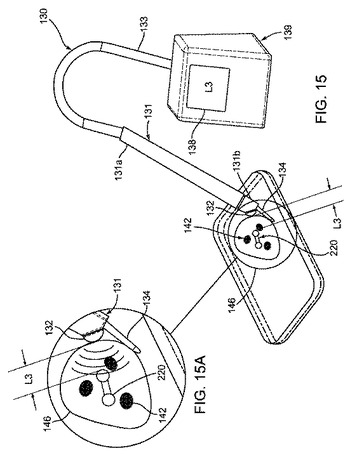
【図16A】
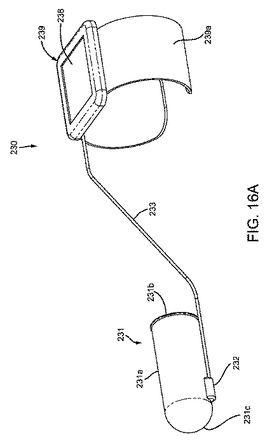
【図16B】
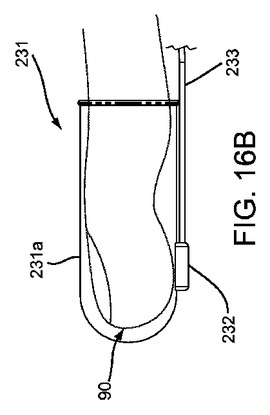
【図17】
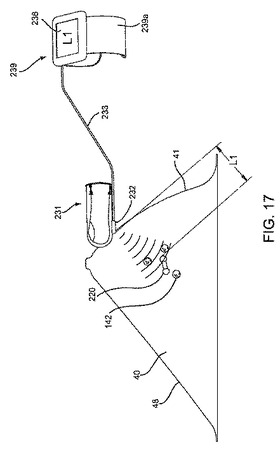
【図18】
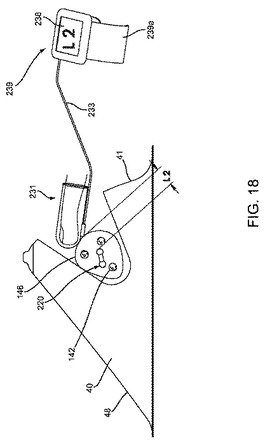
【図19−19a】
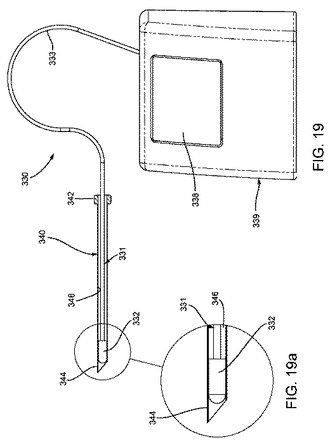
【図20】
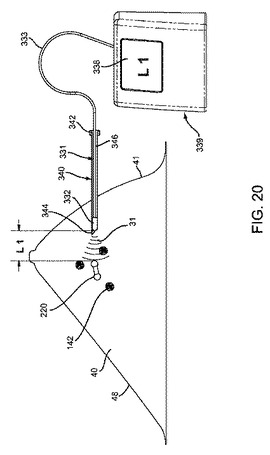
【図21】
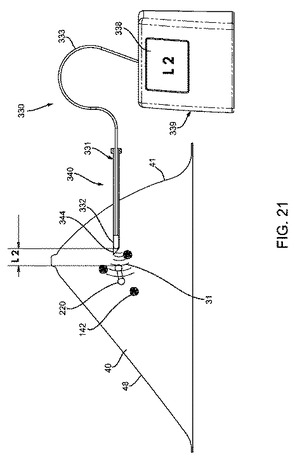
【図22】
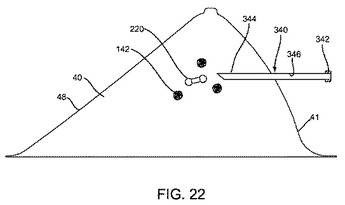
【図23A】
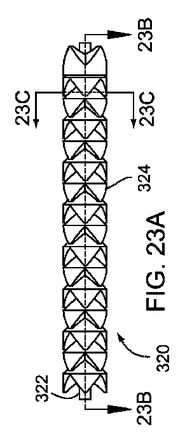
【図23B】
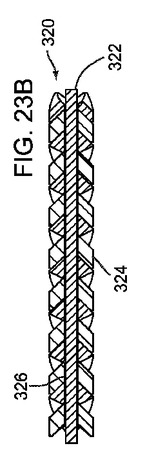
【図23C】
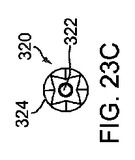
【図23D】
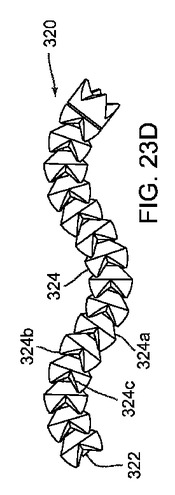
【図24A】
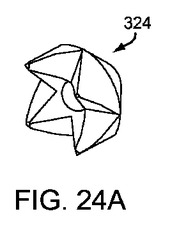
【図24B】
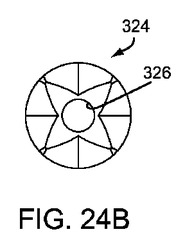
【図24C】
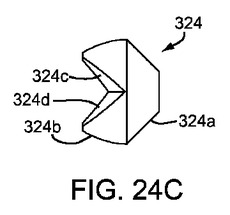
【図25A−25B】
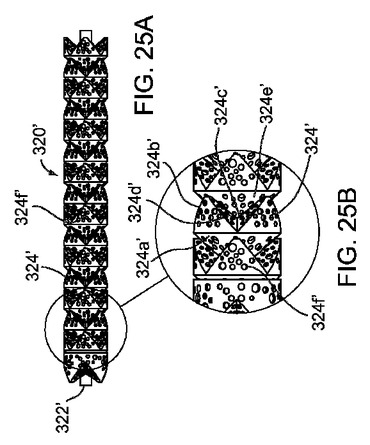
【図26A】
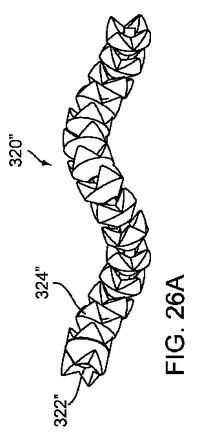
【図26B】
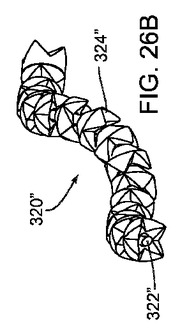
【図26C】
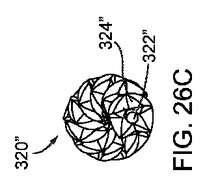
【図27A】
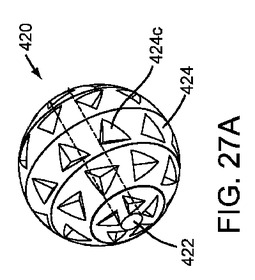
【図27B】
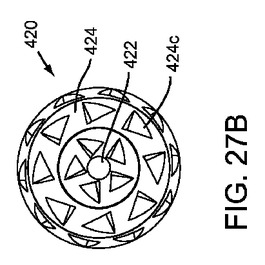
【図27C】
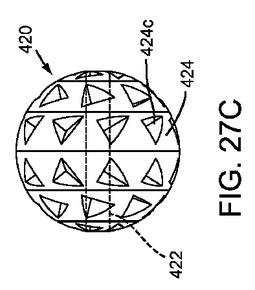
【図28A】
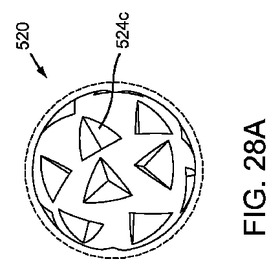
【図28B】
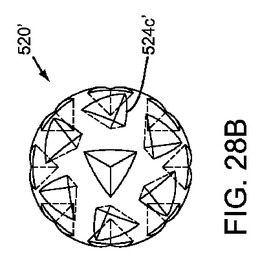
【図28C】
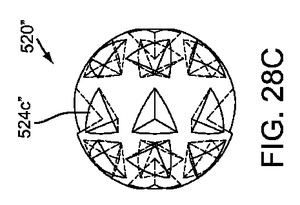
【図29A】
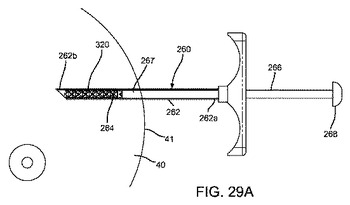
【図29B】
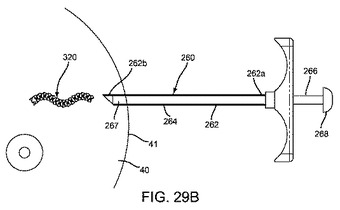
【図30A】
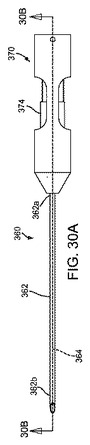
【図30B】
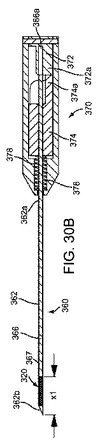
【図31A】
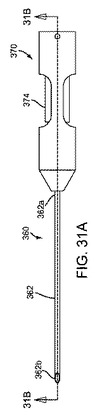
【図31B】
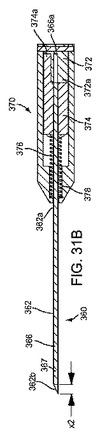
【図32−32A】
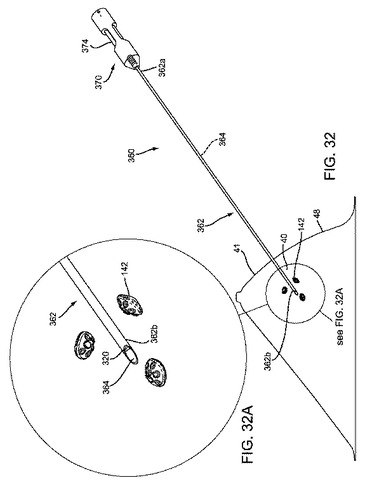
【図33−33A】
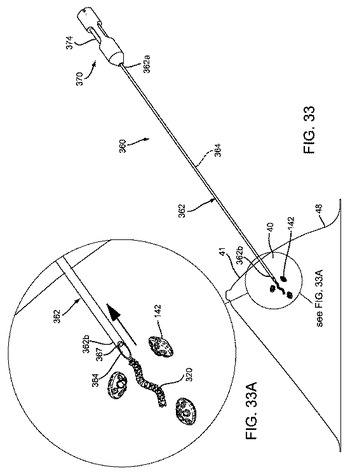
【図34A】
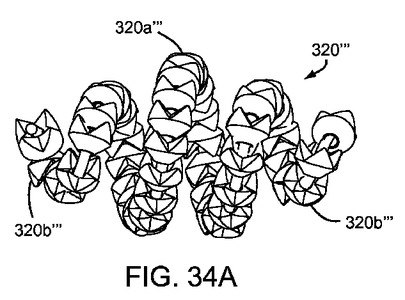
【図34B】
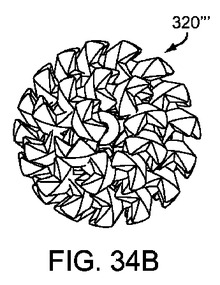
【図35】
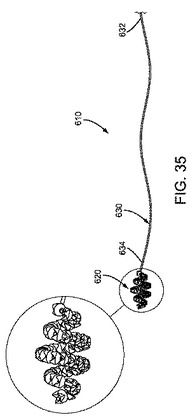
【図36】
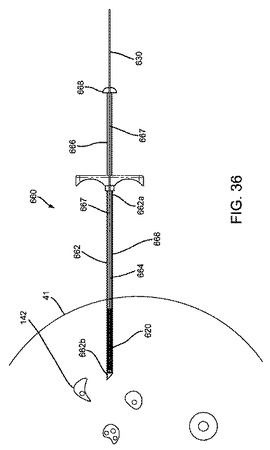
【図37】
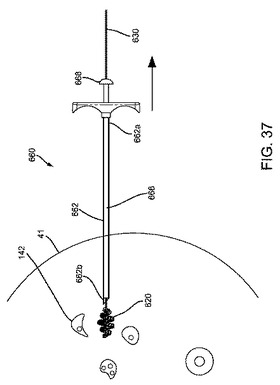
【図38】
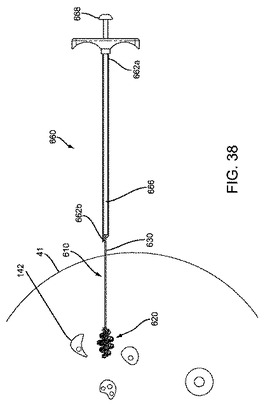
【図39】
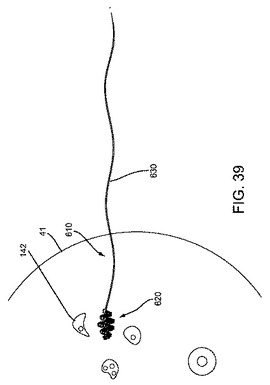
【図40】
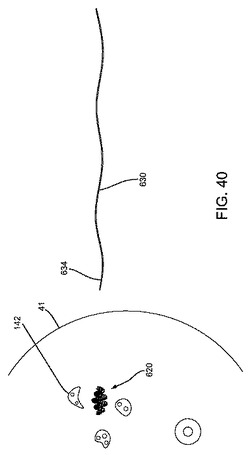
【図41A】

【図41B】
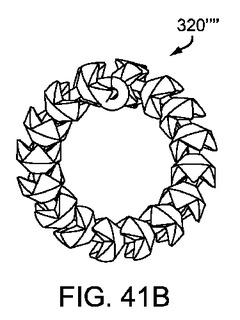
【図42】
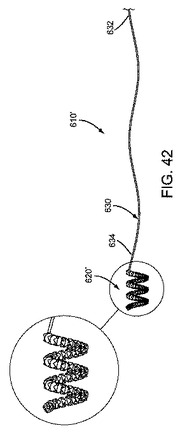
【図43】
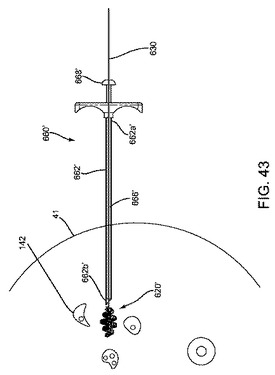
【図44】
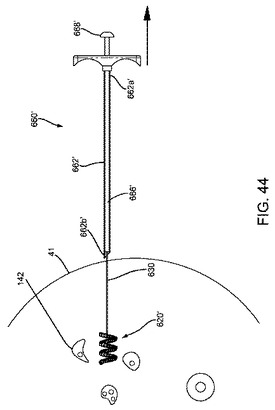
【図45】
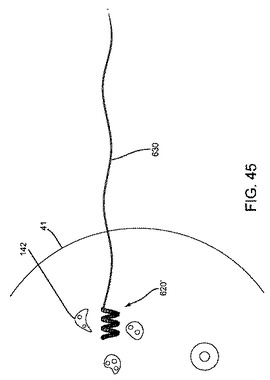
【図46】
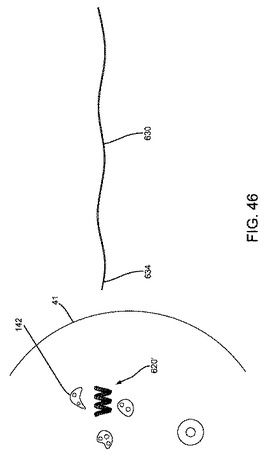
【図47−48】
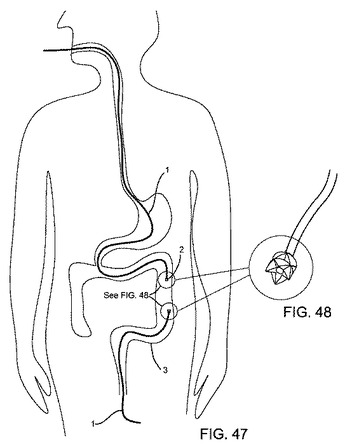
【図49】
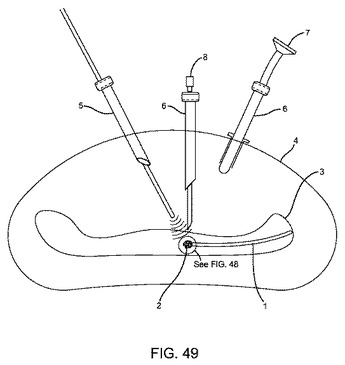
【図50A】
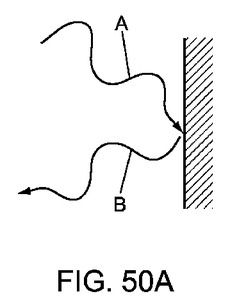
【図50B】
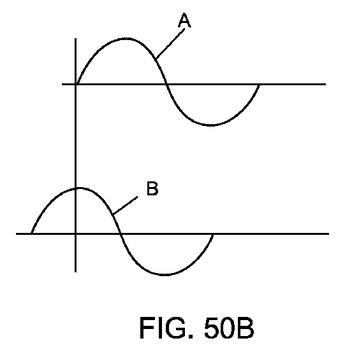
【図2A】
【図2B】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図10A】
【図10B】
【図11】
【図12】
【図13】
【図14−14A】
【図15−15A】
【図16A】
【図16B】
【図17】
【図18】
【図19−19a】
【図20】
【図21】
【図22】
【図23A】
【図23B】
【図23C】
【図23D】
【図24A】
【図24B】
【図24C】
【図25A−25B】
【図26A】
【図26B】
【図26C】
【図27A】
【図27B】
【図27C】
【図28A】
【図28B】
【図28C】
【図29A】
【図29B】
【図30A】
【図30B】
【図31A】
【図31B】
【図32−32A】
【図33−33A】
【図34A】
【図34B】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41A】
【図41B】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47−48】
【図49】
【図50A】
【図50B】
【公表番号】特表2012−531276(P2012−531276A)
【公表日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2012−517805(P2012−517805)
【出願日】平成22年6月25日(2010.6.25)
【国際出願番号】PCT/US2010/040107
【国際公開番号】WO2010/151843
【国際公開日】平成22年12月29日(2010.12.29)
【出願人】(509097404)シアナ メディカル,インク. (3)
【Fターム(参考)】
【公表日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成22年6月25日(2010.6.25)
【国際出願番号】PCT/US2010/040107
【国際公開番号】WO2010/151843
【国際公開日】平成22年12月29日(2010.12.29)
【出願人】(509097404)シアナ メディカル,インク. (3)
【Fターム(参考)】
[ Back to top ]