
車々間通信システム及び車々間通信機
【課題】 他のサービスエリアでの通信データとの干渉を防止することを可能とする。
【解決手段】 車両に搭載され、他の通信機と車々間通信する車々間通信機10を備えた車々間通信システム1において、前記車々間通信機10は、予め設定された複数のエリアのうち、現在在圏しているサービスエリアの制御局ポイントコードを取得し、通信データを送信する場合に、現在在圏するサービスエリアの制御局ポイントコードを通信データに付加して送信するようにすると共に、同一のサービスエリアに存在するいずれか1つの車々間通信機10が、当該サービスエリアでの通信タイミングを制御し、この車々間通信機10が当該サービスエリアを抜け出る場合には、当該サービスエリアに存在するいずれか1つの車々間通信機10に上記通信タイミングの制御動作を実行させるようにした。
【解決手段】 車両に搭載され、他の通信機と車々間通信する車々間通信機10を備えた車々間通信システム1において、前記車々間通信機10は、予め設定された複数のエリアのうち、現在在圏しているサービスエリアの制御局ポイントコードを取得し、通信データを送信する場合に、現在在圏するサービスエリアの制御局ポイントコードを通信データに付加して送信するようにすると共に、同一のサービスエリアに存在するいずれか1つの車々間通信機10が、当該サービスエリアでの通信タイミングを制御し、この車々間通信機10が当該サービスエリアを抜け出る場合には、当該サービスエリアに存在するいずれか1つの車々間通信機10に上記通信タイミングの制御動作を実行させるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両等の移動体間で通信する車々間通信システム、及び、この車々間通信システムに用いて好適な車々間通信機に関する。
【背景技術】
【0002】
従来から、車両等の移動体に車々間通信機(無線通信装置)を搭載し、車々間で通信を行う車々間通信システムが知られている。この種の車々間通信システムにおいては、無線チャンネルへのアクセス制御方式として、路側(インフラ側)から車々間通信機に対して制御信号を送信し、この制御信号に基づいて車々間通信機が無線チャンネルへアクセスする方式や、例えばアロハ方式(ALOHA method)に代表されるように全く制御を伴わないランダムアクセス制御方式などがある。
【0003】
しかしながら、路側から制御信号を送る方式にあっては、車両が通信する際に、その場所(路側)にインフラが存在する必要があり、インフラが構築されていない場所では、車々間通信ができず、車々間通信システムの利用環境が制限されるといった問題がある。
【0004】
また、上記アロハ方式に代表されるランダムアクセス制御方式の場合、車々間通信機間での通信タイミングの制御が行われないため、通信帯域を約18%までしか利用できないことが知られており、通信資源を有効に利用できないという問題がある。
【0005】
そこで近年では、予め定められた特定の車両が通信制御局の機能を担い通信タイミングを規定するビーコン信号等を他の車両に送信することで、この特定の車両がサービスエリア(通信可能範囲)内に存在する車両(移動体)のアクセス制御を行い、インフラを不要とすると共に、通信資源を有効に利用することが可能な方式が提案されている(例えば、特許文献1参照)。
【特許文献1】特開平10−336092号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特定の車両を通信制御局としてサービスエリア内の各車両の通信タイミングを制御する方式にあっては、現在のサービスエリアにて送受されている通信データと、他のサービスエリアにて送受されている通信データとが互いに干渉してしまうといった問題がある。
【0007】
本発明は、上述した事情に鑑みてなされたものであり、通信データの干渉を防止することが可能な車々間通信システム、及び、この車々間通信システムに用いて好適な車々間通信機を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明は、複数の車両の各々に搭載される車々間通信機を備え、これらの車々間通信機が互いに無線通信する車々間通信システムにおいて、前記車々間通信機は、予め設定された複数のサービスエリアのうち、現在在圏しているサービスエリアの識別情報を取得するサービスエリア識別情報取得手段と、現在在圏するサービスエリアの識別情報を送信する情報に付加して送信する送信手段と、現在在圏するサービスエリア内での通信タイミングを規定する制御情報を受信する制御情報受信手段と、前記制御情報受信手段により前記制御情報が受信されない場合に、現在在圏するサービスエリアの前記制御情報を生成し、同一のサービスエリアに存在する他の車々間通信機に向けて前記送信手段に順次送信させる第1送信制御手段と、前記第1送信制御手段が前記制御情報を前記送信手段に順次送信させているときに、現在在圏するサービスエリアを抜け出る場合、同一のサービスエリア内に存在する他の車々間通信機のいずれか一つの車々間通信機に対して前記制御情報の送信動作を行うことを指示する指示信号を前記送信手段に送信させる第2送信制御手段とを具備することを特徴とする。
【0009】
また本発明は、上記発明において、前記第2送信制御手段は、同一のサービスエリア内に存在する他の車々間通信機の各々が当該サービスエリアに滞在する時間に基づいて、これらの車々間通信機の中から一つの車々間通信機を選定し、この選定した車々間通信機に対して前記指示信号を前記送信手段に送信させることを特徴とする。
【0010】
また本発明は、上記発明において、前記第2送信制御手段は、同一のサービスエリア内に存在する他の車々間通信機の中から、当該サービスエリアに滞在する時間が最も長い可能性のある車々間通信機を選定し、この選定した車々間通信機に対して前記指示信号を前記送信手段に送信させることを特徴とする。
【0011】
また本発明は、上記発明において、前記車々間通信機は、自機が搭載された前記車両の現在位置、移動速度及び移動方向を取得する移動情報取得手段と、前記現在位置、移動速度及び移動方向を間欠的に前記送信手段に送信させる第3送信制御手段と、同一のサービスエリア内に存在する他の車々間通信機から送信されてきた各々の車々間通信機の現在位置、移動速度及び移動方向を受信する位置情報受信手段と、前記位置情報受信手段により受信された前記現在位置、移動速度及び移動方向を、車々間通信機ごとに記憶する記憶手段とを更に備え、前記第2送信制御手段は、前記記憶手段に記憶されている車々間通信機の現在位置、移動速度及び移動方向に基づいて、現在在圏するサービスエリアに滞在する時間が最も長い可能性のある車々間通信機を選定し、この選定した車々間通信機に対して前記指示信号を前記送信手段に送信させることを特徴とする。
【0012】
また本発明は、上記発明において、前記第2制御手段は、前記第1送信制御手段が前記制御情報を順次送信しているとき、現在在圏するサービスエリアの中心から所定距離だけ離れ、なおかつ、当該サービスエリアの中心から遠ざかる方向に移動している場合に、同一のサービスエリア内に存在する他の車々間通信機のいずれか一つの車々間通信機に対して前記指示信号を送信することを特徴とする。
【0013】
また本発明は、上記発明において、前記車々間通信機は、前記指示信号を送信した車々間通信機からの応答を受信する応答受信手段を更に備え、前記応答受信手段により前記車々間通信機が前記制御情報の送信動作を実行する旨が示された場合には、前記制御情報の送信を停止することを特徴とする。
【0014】
また、上記目的を達成するために、本発明は、車両に搭載された、他の通信機と無線通信する車々間通信機において、予め設定された複数のサービスエリアのうち、現在在圏しているサービスエリアの識別情報を取得するサービスエリア識別情報取得手段と、現在在圏するサービスエリアの識別情報を送信する情報に付加して送信する送信手段と、現在在圏するサービスエリア内での通信タイミングを規定する制御情報を受信する制御情報受信手段と、前記制御情報受信手段により前記制御情報が受信されない場合に、現在在圏するサービスエリアの前記制御情報を生成し、同一のサービスエリアに存在する他の通信機に向けて前記送信手段に順次送信させる第1送信制御手段と、前記第1送信制御手段が前記制御情報を前記送信手段に順次送信させているときに、現在在圏するサービスエリアを抜け出る場合、同一のサービスエリア内に存在する他の通信機のいずれか一つの通信機に対して前記制御情報の送信動作を行うことを指示する指示信号を前記送信手段に送信させる第2送信制御手段とを具備することを特徴とする。
【0015】
また本発明は、上記発明において、前記第2送信制御手段は、同一のサービスエリア内に存在する他の通信機の各々が当該サービスエリアに滞在する時間に基づいて、これらの通信機の中から一つの通信機を選定し、この選定した通信機に対して前記指示信号を前記送信手段に送信させることを特徴とする。
【0016】
また上記発明において、本発明は、前記第2送信制御手段は、同一のサービスエリア内に存在する他の通信機の中から、当該サービスエリアに滞在する時間が最も長い可能性のある通信機を選定し、この選定した通信機に対して前記指示信号を前記送信手段に送信させることを特徴とする。
【0017】
また本発明は、上記発明において、同一のサービスエリア内に存在する他の通信機から送信された各々の通信機の現在位置、移動速度及び移動方向を受信する位置情報受信手段と、前記位置情報受信手段により受信された前記現在位置、移動速度及び移動方向を、通信機ごとに記憶する記憶手段とを更に備え、前記第2送信制御手段は、前記記憶手段に記憶されている通信機の現在位置、移動速度及び移動方向に基づいて、現在在圏するサービスエリアに滞在する時間が最も長い可能性のある通信機を選定し、この選定した通信機に対して前記指示信号を前記送信手段に送信させることを特徴とする。
【0018】
また本発明は、上記発明において、自機が搭載された前記車両の現在位置、移動速度及び移動方向を取得する移動情報取得手段を更に備え、前記第2制御手段は、前記第1送信制御手段が前記制御情報を順次送信しているとき、現在在圏するサービスエリアの中心から所定距離だけ離れ、なおかつ、当該サービスエリアの中心から遠ざかる方向に移動している場合に、同一のサービスエリア内に存在する他の通信機のいずれか一つの通信機に対して前記指示信号を送信することを特徴とする。
【0019】
また本発明は、上記発明において、前記指示信号を送信した通信機からの応答を受信する応答受信手段を更に備え、前記応答受信手段により前記通信機が前記制御情報の送信動作を実行する旨が示された場合には、前記制御情報の送信を停止することを特徴とする。
【発明の効果】
【0020】
本発明によれば、車々間通信機は、現在在圏するサービスエリアの識別情報を送信する情報(通信データ)に付加して送信するようにしたため、他のサービスエリアにて送受されている通信データとの干渉を防止することができる。
【発明を実施するための最良の形態】
【0021】
以下図面を参照して、本発明の実施の形態について説明する。図1は、本実施の形態にかかる車々間通信システム1の構成を模式的に示す図であり、図2は、当該車々間通信システム1の機能的構成を示すブロック図である。
【0022】
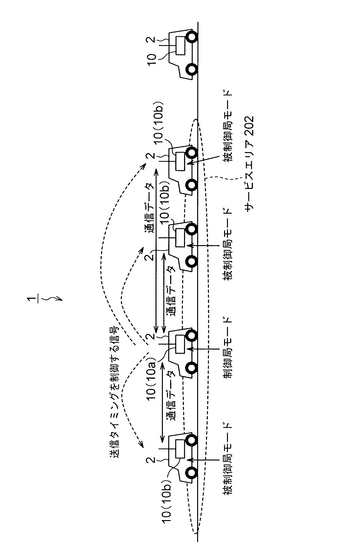
図1に示すように、車々間通信システム1は、移動体たる車両2の各々に搭載された車々間通信機10を備え、この車々間通信機10により車両2の間で無線パケット通信を行うものである。車々間通信機10の各々は、図2に示すように、動作モードとして制御局モードと被制御局モードとの2つの動作モードを有し、無線通信時には、各々がいずれかの動作モードで動作するように構成されている。
【0023】
制御局モードは、同一のサービスエリア202に存在する他の車両2の通信制御を行う機能を実行する動作モードであり、この制御局モードで動作する車々間通信機10は、同一のサービスエリア202内の他の車々間通信機10に対して通信タイミングを指示する動作を実行する。一方、被制御局モードは、制御局モードで動作する車々間通信機10からの通信タイミングの指示を受ける動作モードであり、被制御局モードで動作する車々間通信機10は、制御局モードで動作する車々間通信機10により、無線パケット通信における通信タイミングが制御されることとなる。
【0024】
すなわち、本実施の形態にかかる車々間通信システム1においては、同一のサービスエリア202に存在する複数の車々間通信機10のうち、いずれか一の車々間通信機10が制御局モードで動作すると共に、その他の車々間通信機10が被制御局モードで動作することで、制御局モードで動作する車々間通信機10が他の車々間通信機10の通信タイミングを制御し、複数の車々間通信機10(車両2)間での安定した無線通信を提供可能としている。
【0025】
なお、以下の説明においては、制御局モードで動作する車々間通信機10を車々間制御通信機10aと称し、また、被制御局モードで動作する車々間通信機10を車々間被制御通信機10bと称することで、各々を区別することにする。
【0026】
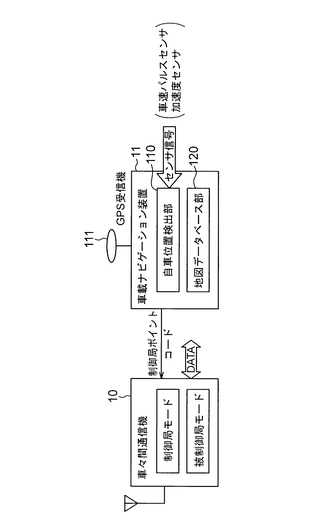
次いで、車々間通信機10の構成について詳細に説明する。車々間通信機10は、プログラムの実行主体であり通信制御手段などの各種制御手段として機能するCPUや、当該プログラム及び各種のデータを格納するRAMやROM等の記憶手段、他の通信機との間で無線通信する無線通信手段(共に不図示)を備え、記憶手段には、上記制御局モードの機能を実現するためのプログラムや、被制御局モードの機能を実現するためのプログラム等が格納されている。この車々間通信機10は、図2に示すように、同一車両2に搭載された車載ナビゲーション装置11と相互にデータ通信可能に信号ケーブル等で接続されている。
【0027】
車載ナビゲーション装置11は、自装置の各部を制御する制御手段としての制御部の他、自車位置を検出する手段としての自車位置検出部110と、地図データベース部120とを備えている。
【0028】
自車位置検出部110は、GPSアンテナ111を有するGPS(Global Positioning System)航法ユニットと、車速パルスセンサや加速度センサ等の各種センサを有する自立航法ユニットとを備えている。GPS航法ユニットは、GPSレシーバを備え、測位衛星からの受信電波に基づいて自車位置を検出するものである。自立航法ユニットは、車速パルスセンサからのセンサ信号や加速度センサからのセンサ信号に基づいて車両2の速度(移動距離)や移動方向を検出し車両2外部(例えばGPS衛星)からの信号を用いずに自車位置を検出するものである。かかる構成により、自車位置検出部110は、GPS航法と自立航法とのハイブリット航法により、自車位置を精度よく計算可能となっている。
【0029】
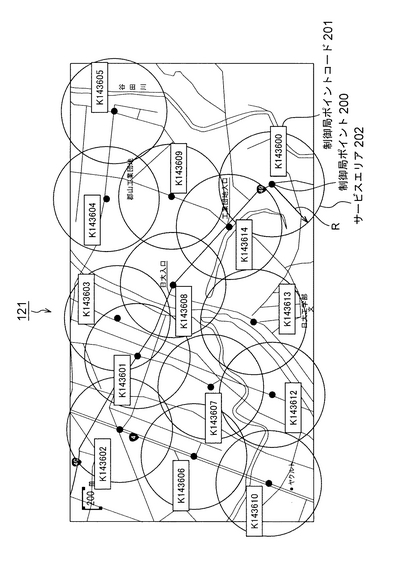
地図データベース部120は、地図データ121を格納するものであり、ハードディスク装置或いは光ディスク装置等の記憶手段を備えている。図3は、地図データベース部120に格納されている地図データ121の構成を模式的に示す図である。
【0030】
図3に示すように、地図データ121には、予め設定された複数のサービスエリア202の中心を示す制御局ポイント200の位置情報(座標情報)と、当該制御局ポイント200、すなわち、サービスエリア202を一意に特定するための制御局ポインコード(識別情報)201と、制御局ポイント200を中心としたサービスエリア202のサイズ(半径)Rとが登録されている。各制御局ポイント200は、隣接するサービスエリア202が互いに重なり合うように地図上に配置されており、これにより途切れることの無い車々間通信が可能となる。
【0031】
なお、本実施形態におけるサービスエリア202は、一般的な固定基地局が形成する移動端末との無線通信可能範囲ではなく、地図上において、通信可能領域を複数のエリアに分割してなるエリアを指す。このサービスエリア202の配置(すなわち、制御局ポイント200の設定位置)は、電波環境測定データや交通量情報等に基づき最も有利な通信状態が得られるポイントに配置するのが望ましく、また、一定間隔で幾何学的な配置を取ることも可能である。また、同図に示す制御局ポイント200の位置情報等は、地図データ121に付加する構成に限らず、上記制御局ポイント200ごと、すなわち、制御局ポイントコード201ごとに、その位置情報と、サービスエリア202のサイズとがテーブルデータとして地図データ121と別途に格納される構成としても良い。
【0032】
さて、かかる構成の下、車載ナビゲーション装置11は、上記自車位置検出部110にて計算された自車位置に基づいて、自車両2が在圏しているサービスエリア202及びその制御局ポイントコード201を上記地図データベース部120に格納されているデータを検索することで特定し、車々間通信機10に出力する。そして、車々間通信機10は、車載ナビゲーション装置11から制御局ポイントコード201を取得すると、当該制御局ポイントコード201を通信データに付加して通信する。
【0033】
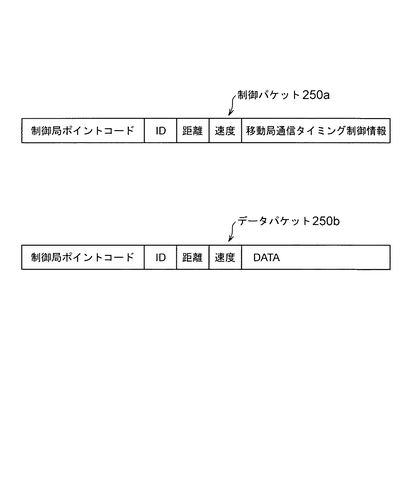
ここで、本実施の形態にかかる車々間通信システム1においては、車々間通信機10が送受する通信データ250として、制御パケット250aと、データパケット250bとの2種類の通信データが用いられる。図4は、制御パケット250aとデータパケット250bとの構成を模式的に示す図である。
【0034】
制御パケット250aは、制御局モードで動作する車々間通信機10、すなわち、車々間制御通信機10aが通信タイミングの制御のために一定の時間間隔で定期的に送出する通信データである。この制御パケット250aのパケットヘッダには、上記車載ナビゲーション装置11から出力された制御局ポイントコード201と、IDと、距離と、速度とが含まれ、これに通信タイミング制御情報がデータとして付加されて制御パケット250aが構成されている。
【0035】
IDは車々間通信機10を一意に特定する識別情報であり、距離は自車位置から制御局ポイント200(サービスエリアの中心位置)までの距離を示すものであり、また、速度は車両2の移動速度を、走行方向と共に示すものである。
【0036】
通信タイミング制御情報は、スロット同期通信等に用いられる、いわゆるビーコンパケットと略同等な情報が格納される。詳述すると、通信タイミング制御情報は、時分割された通信スロットのうち何番目のスロットにて当該制御パケット250aが送信されたかを示す情報である。従って、被制御局モードで動作する車々間通信機10、すなわち、車々間被制御通信機10bは、この制御パケット250aを受信することで、制御パケット250aの受信タイミングを同期ポイントとして同期をとると共に、通信タイミング制御情報に基づいてデータを送信すべき期間(タイミング)を特定することとなる。
【0037】
データパケット250bは、各車々間通信機10の間で送受するデータ(情報)を送信するための通信パケットである。このデータパケット250bのパケットヘッダには、制御パケット250aと同様に、上記車載ナビゲーション装置11から出力された制御局ポイントコード201と、IDと、距離と、速度とが含まれ、これに各車々間通信機10の間で送受するデータが付加されてデータパケット250bが構成されている。
【0038】
このように、本実施の形態にかかる車々間通信システム1にあっては、車々間制御通信機10aが制御パケット250aを送信する際に、通信タイミング制御情報に制御局ポイントコード201を付加して送信することで、同一のサービスエリア202に存在する他の車々間通信機10に対して当該通信タイミング制御情報に基づいて通信同期を確立し通信データを送受する旨を明示する構成となっている。
【0039】
また、本実施の形態では、制御局パケット250a及びデータパケット250bの各々に、ID、距離及び速度を含める構成とし、車々間通信機10の各々が、同一のサービスエリア202に存在する各車両2の自車位置や移動速度、移動方向を取得可能となっている。
【0040】
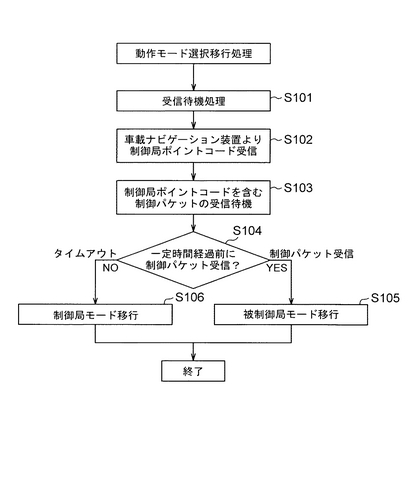
次いで、本実施の形態の動作について説明する。以下の動作説明においては、まず、車両2が新たなサービスエリアに進入した際に、この車両2に搭載された車々間通信機10が制御局モード及び被制御局モードのいずれかの動作モードを選択・実行するときの動作について説明する。
【0041】
図5は、かかる動作モード選択・実行処理を示すフローチャートである。この図に示すように、車載ナビゲーション装置11による自車位置検出により、車両2が新たなサービスエリア202に進入したことを車々間通信機10が検知すると、車々間通信機10は、先ず、このサービスエリア202内で他の車々間通信機10から制御パケット250aが既に送信されているかを検知するために、受信待機状態に移行して、当該サービスエリア内で送受されている全ての通信データの受信を行うための処理を実行する(ステップS101)。
【0042】
具体的には、車々間通信機10は、車載ナビゲーション装置11から、現在のサービスエリアの制御局ポイントコード201を受信し(ステップS102)、そして、この制御局ポイントコード201が付加された制御パケット250aを受信すべく受信待機状態に移行し(ステップS103)、予め設定された一定時間の間、制御パケット250aの受信を試みる(ステップS104)。
【0043】
車々間通信機10は、この受信待機状態の間に制御パケット250aを受信できた場合(ステップS104:YES)、既に他の車々間通信機10により、通信タイミングの制御が実施されているため、その制御パケット250aに基づいて通信同期を確立すべく、動作モードを被制御局モードに移行する(ステップS105)。
【0044】
一方、車々間通信機10は、受信待機状態に移行したときから一定時間が経過しても、制御パケット250aを受信できなかった場合には(ステップS104:NO)、当該サービスエリア内に制御局モードで動作する車々間通信機10が存在しないことを意味するため、動作モードを制御局モードに移行して、当該サービスエリアの制御局ポイントコード201を付加した制御パケット250aを定期的に送出する動作を開始する(ステップS106)。
【0045】
以上の処理により、車々間通信機10は、制御局モードまたは被制御局モードのいずれかの動作モードを決定し、その後に、車々間で通信データ(データパケット250b)の送受を行うこととなる。
【0046】
ところで、制御局モードで動作する車々間制御通信機10aが現在のサービスエリア202の外に出る等した場合には、現在のサービスエリア202内の通信タイミングを制御する車々間通信機10が存在しなくなるため、制御局モードで動作する車々間制御通信機10aを新たに選定する必要がある。
【0047】
そこで、上記車々間制御通信機10aがサービスエリア202を抜ける際に、その旨をサービスエリア202内に残る車々間通信機10に対して送信し、そして、これらの車々間通信機10の中から、制御モードで動作する車々間制御通信機10aを出現させるようにする。しかしながら、この場合、サービスエリア202に残る車々間通信機10が各々独立して車々間制御通信機10aとして動作しようとすると、車々間制御通信機10aが同時に複数発生してしまう可能性かあり、無線データ通信用のバケットか相互に衝突する等して、システム運用に障害か発生する恐れがある。
【0048】
これを避けるために、車々間制御通信機10aがサービスエリア202の外に抜けるときに、その他の車々間通信機10の各々が、制御局モードで動作している車々間制御通信機10aが新たに存在しているかという確認するための観測期間を充分長くとれば良いものの、その観測期間の間、データ通信ができなくなるといった問題がある。さらに、新たに制御局モードで動作することとなった車々間制御通信機10aか、すぐにサービスエリア202を出てしまうと、車々間制御通信機10aの選出を再度行う必要があり、このようなことが連続すると、車々間通信システム1における通信の安定性が阻害され兼ねない。
【0049】
そこで本実施の形態では、次のようにして、制御局モードで動作する車々間制御通信機10aがサービスエリア202内に常時安定的に存在するようにしている。すなわち、制御局モードで動作する車々間制御通信機10aがサービスエリア202を抜ける前に、当該車々間通信制御通信機10aが、サービスエリア202内の他の車々間通信機10の中から、車々間制御通信機10aの役割を担うべき車々間通信機10、すなわち、サービスエリア202に最も長く滞在する可能性の高い車々間通信機10を選定するようにしている。
【0050】
さらに詳述すると、本実施の形態では、制御局モードで動作する車々間制御通信機10aは、サービスエリア202内に存在する車々間通信機10(被制御局モードで動作する車々間被制御通信機10b)の各々の制御局ポイント200(サービスエリアの中心位置)までの距離と、移動速度(移動方向を含む)とを監視する位置監視テーブルをRAM等に生成し、サービスエリア202内で送受されている通信データ(制御パケット250a及びデータパケット250b)を受信するごとに、この通信データに含まれる上述したID、距離及び速度に基づいて、上記位置監視テーブルを逐次更新するように構成されている。
【0051】
そして、この車々間制御通信機10aがサービスエリア202から抜け出る場合に、位置監視テーブルに登録されている車々間通信機10の中から、最も長く滞在する可能性の高い車々間通信機10を選定し、この車々間通信機10の動作モードを制御局モードへ切り替えさせるようにしている。なお、本実施の形態では、各車々間通信機10が上記ID、距離及び速度を間欠的(例えば1秒ごと)に送信しており、車々間制御通信機10aが、同一サービスエリア202に存在する全ての車々間通信機10の位置、移動速度及び移動方向を逐次監視可能となっている。
【0052】
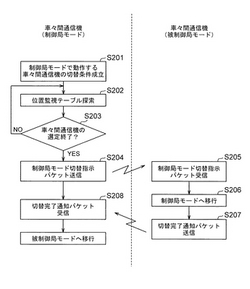
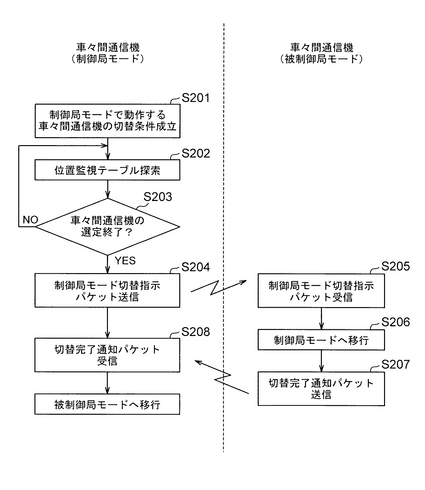
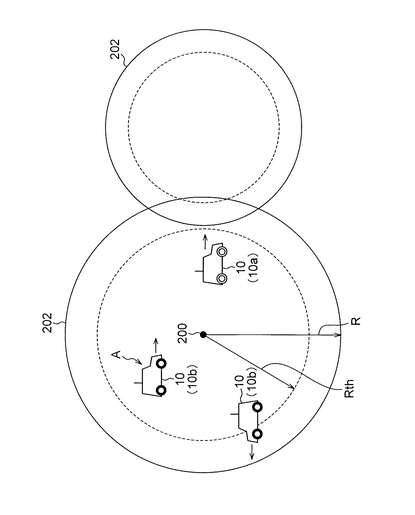
図6は、車々間制御通信機10aの選定及び切り替え動作を示すシーケンス図である。この図に示すように、現時点において制御局モードで動作している車々間制御通信機10aが、サービスエリア202を抜け出し他のサービスエリア202に移動する前に、現在のサービスエリア202内での車々間制御通信機10aの切替条件が成立する(ステップS201)。詳述すると、本実施の形態では、図7に示すように、車々間制御通信機10aが制御局ポイント200(サービスエリア202の中心)から所定距離Rthだけ離れ、なおかつ、この制御局ポイント200から遠ざかる方向に移動している場合に、切替条件が成立する。本実施の形態では、所定距離Rthを、サービスエリア202の半径Rの約80%としている。
【0053】
車々間制御通信機10aは、車載ナビゲーション装置11の出力に基づいて上記切替条件が成立したことを検知した後、上述した位置監視テーブルを探索して、現在のサービスエリア202に最も長く滞在する可能性の高い車々間通信機10を選定する(ステップS202)。具体的には、車々間制御通信機10aは、現時点において、例えば制御局ポイント200からサービスエリア202の半径Rに対して約75%程度の距離だけ離れた場所に位置し、なおかつ、制御局ポイント200に向かって移動している車々間通信機10を条件として位置監視テーブルを探索し、この条件に該当する車々間通信機10を選定する(例えば、図7にて矢印Aで示す車々間通信機10)。なお、この条件に該当する車々間通信機10が複数存在する場合には、より低速で移動している車々間通信機10を選定する。一方、この条件に該当する車々間通信機10が存在しない場合には、制御局ポイント200に近づく方向に移動している車々間通信機10のうち制御局ポイント200から最も遠い車々間通信機10、或いは、制御局ポイント200から遠ざかる方向に移動している車々間通信機10のうち制御局ポイント200から最も近い車々間通信機10を選定することとなる。
【0054】
車々間制御通信機10aは、次の車々間制御通信機10aとなるのに最適な車々間通信機10の選定が終了するまで、上記位置監視テーブルの探索を続け、その選定が終了した場合には(ステップS203:YES)、その車々間通信機10の動作モードを被制御局モードから制御局モードに変更させるべく次の処理を実行する。すなわち、車々間制御通信機10aは、選定した車々間通信機10に対して、制御局モードへの動作切り替えを指示する制御局モード切替指示パケットを制御パケット250aとして送信する(ステップS204)。
【0055】
車々間制御通信機10aにより選定された車々間通信機10が制御局モード切替指示パケットを受信すると(ステップS205)、自機の動作モードを被制御局モードから制御局モードに移行し(ステップS206)、動作モードの切り替え完了を示す切替完了通知パケットを車々間制御通信機10aに送信する(ステップS207)。一方、車々間制御通信機10aは、切替完了通知パケットを受信すると(ステップS208)、動作モードを制御局モードから被制御局モードへ移行する(ステップS209)。
【0056】
以上の処理により、サービスエリア202内において制御局モードで動作する車々間制御通信機10aが切り替えられることとなる。なお、車々間制御通信機10aが制御局モード切替指示パケットを送信した後、一定時間が経過しても応答が無い場合、或いは、制御局モードへの切り替えが拒否された場合は、ステップS202に処理手順を戻し、再度、車々間通信機10の選定を実行し直すようにしても良い。本実施の形態においては、車々間制御通信機10aは、サービスエリア202を抜けるときではなく、上記のように制御局ポイント200から所定距離だけ離れたときに、車々間制御通信機10aを切り替えるようにするため、選定した車々間通信機10が制御局モードに移行しなかった場合でも、新たな車々間通信機10を選定するための時間を充分に確保することが可能である。
【0057】
以上説明したように、本実施の形態によれば、車々間通信機10の各々が、通信データを送信する場合に、現在在圏するサービスエリア202の制御局ポイントコード201を付加して送信するようにしたため、他のサービスエリアで送受されている通信データとの干渉を防止することができる。
【0058】
また、本実施の形態によれば、車々間通信機10の各々が制御局モードと被制御局モードとの2つの動作モードを有し、新たなサービスエリアに進入した際に、通信タイミングを規定する制御情報たる制御パケット250aを受信できなかった場合に、制御局モードにて動作し、同一のサービスエリアに存在する他の車々間通信機10に対して制御パケット250aを送信する構成であるため、路側等に制御パケットを送信するためのインフラを設ける必要が無く、なおかつ、不特定多数の一般の車両2の間で簡単に車々間通信システムを構築することが可能となる。
【0059】
さらに本実施の形態によれば、制御局モードで動作している車々間通信機10(車々間制御通信機10a)が、現在在圏するサービスエリア202を抜け出る場合、同一のサービスエリア202内に存在する他の車々間通信機10のいずれか一つの車々間通信機10に対して制御局モードで動作することを指示するようにしたため、制御局モードで動作する車々間通信機10をサービスエリア202内に安定的に存在させることができる。
【0060】
特に、制御局モードで動作している車々間通信機10(車々間制御通信機10a)は、サービスエリア202に滞在する時間が最も長い可能性のある車々間通信機10を選定し、この選定した車々間通信機10に対して制御局モードで動作することを指示するようにしたため、制御局モードで動作する車々間通信機10の切り替え頻度を削減でき、これにより、制御局モードで動作する車々間通信機10の切り替え時に発生する恐れのある通信データの衝突や隠れ端末問題等を回避し、安定した通信を実現可能となる。
【0061】
上述した実施の形態は、あくまでも本発明の一態様であり、本発明の範囲内で任意に変形可能である。
【0062】
例えば、上記実施の形態では、車載ナビゲーション装置11と車々間通信機10とを別体として設ける構成としたが、これらを一体とする構成としても良い。すなわち、車々間通信機10に、上記自車位置検出部110や地図データベース部120等を設ける構成とし、車々間通信機10が現在の位置検出やサービスエリア202及び制御局ポイント200の識別情報の特定を行う構成としても良い。
【0063】
また例えば、上記実施の形態において、同一のサービスエリア内では、当該サービスエリアの制御局ポイントコード201を識別情報として通信データに付加して送受することで、他のサービスエリアにて送受される通信データとの干渉を防止する構成としたが、これに加えて、更に、互いに隣接するサービスエリアの各々に割り当てる無線周波数チャンネルを互いに異ならせるか、或いは、互いに隣接するサービスエリアの各々での通信タイミングを互いに異ならせることで、通信データの干渉発生を防止する効果をより高めることが可能となる。なお、隣接サービスエリアの各々で通信タイミングを異ならせるには、例えば車々間通信機10或いは車載ナビゲーション装置11が、各サービスエリアでの通信タイミングを規定するサービスタイミング情報を予め記憶し、このサービスタイミング情報に基づいて制御パケット250aの送受動作を実行する構成とすれば良い。サービスタイミング情報には、例えば、GPS信号から得られる絶対時間を基準とした通信タイミング情報などを用いることが可能である。
【図面の簡単な説明】
【0064】
【図1】本発明の実施の形態にかかる車々間通信システムの構成を模式的に示す図である。
【図2】車々間通信機及び車載ナビゲーション装置の機能的構成を示すブロック図である。
【図3】地図データを模式的に示す図である。
【図4】通信データとして送受する制御パケット及びデータパケットの構成を示す図である。
【図5】動作モード選択移行処理を示すフローチャートである。
【図6】制御局モードで動作する車々間通信機の切替処理を示すフローチャートである。
【図7】制御局モードで動作する車々間通信機の切り替え時の動作を説明するための図である。
【符号の説明】
【0065】
1 車々間通信システム
2 車両
10 車々間通信機
10a 車々間制御通信機
10b 車々間被制御通信機
11 車載ナビゲーション装置
110 自車位置検出部
120 地図データベース部
121 地図データ
201 制御局ポイントコード
202 サービスエリア
250 通信データ
250a 制御パケット
250b データパケット
【技術分野】
【0001】
本発明は、車両等の移動体間で通信する車々間通信システム、及び、この車々間通信システムに用いて好適な車々間通信機に関する。
【背景技術】
【0002】
従来から、車両等の移動体に車々間通信機(無線通信装置)を搭載し、車々間で通信を行う車々間通信システムが知られている。この種の車々間通信システムにおいては、無線チャンネルへのアクセス制御方式として、路側(インフラ側)から車々間通信機に対して制御信号を送信し、この制御信号に基づいて車々間通信機が無線チャンネルへアクセスする方式や、例えばアロハ方式(ALOHA method)に代表されるように全く制御を伴わないランダムアクセス制御方式などがある。
【0003】
しかしながら、路側から制御信号を送る方式にあっては、車両が通信する際に、その場所(路側)にインフラが存在する必要があり、インフラが構築されていない場所では、車々間通信ができず、車々間通信システムの利用環境が制限されるといった問題がある。
【0004】
また、上記アロハ方式に代表されるランダムアクセス制御方式の場合、車々間通信機間での通信タイミングの制御が行われないため、通信帯域を約18%までしか利用できないことが知られており、通信資源を有効に利用できないという問題がある。
【0005】
そこで近年では、予め定められた特定の車両が通信制御局の機能を担い通信タイミングを規定するビーコン信号等を他の車両に送信することで、この特定の車両がサービスエリア(通信可能範囲)内に存在する車両(移動体)のアクセス制御を行い、インフラを不要とすると共に、通信資源を有効に利用することが可能な方式が提案されている(例えば、特許文献1参照)。
【特許文献1】特開平10−336092号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特定の車両を通信制御局としてサービスエリア内の各車両の通信タイミングを制御する方式にあっては、現在のサービスエリアにて送受されている通信データと、他のサービスエリアにて送受されている通信データとが互いに干渉してしまうといった問題がある。
【0007】
本発明は、上述した事情に鑑みてなされたものであり、通信データの干渉を防止することが可能な車々間通信システム、及び、この車々間通信システムに用いて好適な車々間通信機を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明は、複数の車両の各々に搭載される車々間通信機を備え、これらの車々間通信機が互いに無線通信する車々間通信システムにおいて、前記車々間通信機は、予め設定された複数のサービスエリアのうち、現在在圏しているサービスエリアの識別情報を取得するサービスエリア識別情報取得手段と、現在在圏するサービスエリアの識別情報を送信する情報に付加して送信する送信手段と、現在在圏するサービスエリア内での通信タイミングを規定する制御情報を受信する制御情報受信手段と、前記制御情報受信手段により前記制御情報が受信されない場合に、現在在圏するサービスエリアの前記制御情報を生成し、同一のサービスエリアに存在する他の車々間通信機に向けて前記送信手段に順次送信させる第1送信制御手段と、前記第1送信制御手段が前記制御情報を前記送信手段に順次送信させているときに、現在在圏するサービスエリアを抜け出る場合、同一のサービスエリア内に存在する他の車々間通信機のいずれか一つの車々間通信機に対して前記制御情報の送信動作を行うことを指示する指示信号を前記送信手段に送信させる第2送信制御手段とを具備することを特徴とする。
【0009】
また本発明は、上記発明において、前記第2送信制御手段は、同一のサービスエリア内に存在する他の車々間通信機の各々が当該サービスエリアに滞在する時間に基づいて、これらの車々間通信機の中から一つの車々間通信機を選定し、この選定した車々間通信機に対して前記指示信号を前記送信手段に送信させることを特徴とする。
【0010】
また本発明は、上記発明において、前記第2送信制御手段は、同一のサービスエリア内に存在する他の車々間通信機の中から、当該サービスエリアに滞在する時間が最も長い可能性のある車々間通信機を選定し、この選定した車々間通信機に対して前記指示信号を前記送信手段に送信させることを特徴とする。
【0011】
また本発明は、上記発明において、前記車々間通信機は、自機が搭載された前記車両の現在位置、移動速度及び移動方向を取得する移動情報取得手段と、前記現在位置、移動速度及び移動方向を間欠的に前記送信手段に送信させる第3送信制御手段と、同一のサービスエリア内に存在する他の車々間通信機から送信されてきた各々の車々間通信機の現在位置、移動速度及び移動方向を受信する位置情報受信手段と、前記位置情報受信手段により受信された前記現在位置、移動速度及び移動方向を、車々間通信機ごとに記憶する記憶手段とを更に備え、前記第2送信制御手段は、前記記憶手段に記憶されている車々間通信機の現在位置、移動速度及び移動方向に基づいて、現在在圏するサービスエリアに滞在する時間が最も長い可能性のある車々間通信機を選定し、この選定した車々間通信機に対して前記指示信号を前記送信手段に送信させることを特徴とする。
【0012】
また本発明は、上記発明において、前記第2制御手段は、前記第1送信制御手段が前記制御情報を順次送信しているとき、現在在圏するサービスエリアの中心から所定距離だけ離れ、なおかつ、当該サービスエリアの中心から遠ざかる方向に移動している場合に、同一のサービスエリア内に存在する他の車々間通信機のいずれか一つの車々間通信機に対して前記指示信号を送信することを特徴とする。
【0013】
また本発明は、上記発明において、前記車々間通信機は、前記指示信号を送信した車々間通信機からの応答を受信する応答受信手段を更に備え、前記応答受信手段により前記車々間通信機が前記制御情報の送信動作を実行する旨が示された場合には、前記制御情報の送信を停止することを特徴とする。
【0014】
また、上記目的を達成するために、本発明は、車両に搭載された、他の通信機と無線通信する車々間通信機において、予め設定された複数のサービスエリアのうち、現在在圏しているサービスエリアの識別情報を取得するサービスエリア識別情報取得手段と、現在在圏するサービスエリアの識別情報を送信する情報に付加して送信する送信手段と、現在在圏するサービスエリア内での通信タイミングを規定する制御情報を受信する制御情報受信手段と、前記制御情報受信手段により前記制御情報が受信されない場合に、現在在圏するサービスエリアの前記制御情報を生成し、同一のサービスエリアに存在する他の通信機に向けて前記送信手段に順次送信させる第1送信制御手段と、前記第1送信制御手段が前記制御情報を前記送信手段に順次送信させているときに、現在在圏するサービスエリアを抜け出る場合、同一のサービスエリア内に存在する他の通信機のいずれか一つの通信機に対して前記制御情報の送信動作を行うことを指示する指示信号を前記送信手段に送信させる第2送信制御手段とを具備することを特徴とする。
【0015】
また本発明は、上記発明において、前記第2送信制御手段は、同一のサービスエリア内に存在する他の通信機の各々が当該サービスエリアに滞在する時間に基づいて、これらの通信機の中から一つの通信機を選定し、この選定した通信機に対して前記指示信号を前記送信手段に送信させることを特徴とする。
【0016】
また上記発明において、本発明は、前記第2送信制御手段は、同一のサービスエリア内に存在する他の通信機の中から、当該サービスエリアに滞在する時間が最も長い可能性のある通信機を選定し、この選定した通信機に対して前記指示信号を前記送信手段に送信させることを特徴とする。
【0017】
また本発明は、上記発明において、同一のサービスエリア内に存在する他の通信機から送信された各々の通信機の現在位置、移動速度及び移動方向を受信する位置情報受信手段と、前記位置情報受信手段により受信された前記現在位置、移動速度及び移動方向を、通信機ごとに記憶する記憶手段とを更に備え、前記第2送信制御手段は、前記記憶手段に記憶されている通信機の現在位置、移動速度及び移動方向に基づいて、現在在圏するサービスエリアに滞在する時間が最も長い可能性のある通信機を選定し、この選定した通信機に対して前記指示信号を前記送信手段に送信させることを特徴とする。
【0018】
また本発明は、上記発明において、自機が搭載された前記車両の現在位置、移動速度及び移動方向を取得する移動情報取得手段を更に備え、前記第2制御手段は、前記第1送信制御手段が前記制御情報を順次送信しているとき、現在在圏するサービスエリアの中心から所定距離だけ離れ、なおかつ、当該サービスエリアの中心から遠ざかる方向に移動している場合に、同一のサービスエリア内に存在する他の通信機のいずれか一つの通信機に対して前記指示信号を送信することを特徴とする。
【0019】
また本発明は、上記発明において、前記指示信号を送信した通信機からの応答を受信する応答受信手段を更に備え、前記応答受信手段により前記通信機が前記制御情報の送信動作を実行する旨が示された場合には、前記制御情報の送信を停止することを特徴とする。
【発明の効果】
【0020】
本発明によれば、車々間通信機は、現在在圏するサービスエリアの識別情報を送信する情報(通信データ)に付加して送信するようにしたため、他のサービスエリアにて送受されている通信データとの干渉を防止することができる。
【発明を実施するための最良の形態】
【0021】
以下図面を参照して、本発明の実施の形態について説明する。図1は、本実施の形態にかかる車々間通信システム1の構成を模式的に示す図であり、図2は、当該車々間通信システム1の機能的構成を示すブロック図である。
【0022】
図1に示すように、車々間通信システム1は、移動体たる車両2の各々に搭載された車々間通信機10を備え、この車々間通信機10により車両2の間で無線パケット通信を行うものである。車々間通信機10の各々は、図2に示すように、動作モードとして制御局モードと被制御局モードとの2つの動作モードを有し、無線通信時には、各々がいずれかの動作モードで動作するように構成されている。
【0023】
制御局モードは、同一のサービスエリア202に存在する他の車両2の通信制御を行う機能を実行する動作モードであり、この制御局モードで動作する車々間通信機10は、同一のサービスエリア202内の他の車々間通信機10に対して通信タイミングを指示する動作を実行する。一方、被制御局モードは、制御局モードで動作する車々間通信機10からの通信タイミングの指示を受ける動作モードであり、被制御局モードで動作する車々間通信機10は、制御局モードで動作する車々間通信機10により、無線パケット通信における通信タイミングが制御されることとなる。
【0024】
すなわち、本実施の形態にかかる車々間通信システム1においては、同一のサービスエリア202に存在する複数の車々間通信機10のうち、いずれか一の車々間通信機10が制御局モードで動作すると共に、その他の車々間通信機10が被制御局モードで動作することで、制御局モードで動作する車々間通信機10が他の車々間通信機10の通信タイミングを制御し、複数の車々間通信機10(車両2)間での安定した無線通信を提供可能としている。
【0025】
なお、以下の説明においては、制御局モードで動作する車々間通信機10を車々間制御通信機10aと称し、また、被制御局モードで動作する車々間通信機10を車々間被制御通信機10bと称することで、各々を区別することにする。
【0026】
次いで、車々間通信機10の構成について詳細に説明する。車々間通信機10は、プログラムの実行主体であり通信制御手段などの各種制御手段として機能するCPUや、当該プログラム及び各種のデータを格納するRAMやROM等の記憶手段、他の通信機との間で無線通信する無線通信手段(共に不図示)を備え、記憶手段には、上記制御局モードの機能を実現するためのプログラムや、被制御局モードの機能を実現するためのプログラム等が格納されている。この車々間通信機10は、図2に示すように、同一車両2に搭載された車載ナビゲーション装置11と相互にデータ通信可能に信号ケーブル等で接続されている。
【0027】
車載ナビゲーション装置11は、自装置の各部を制御する制御手段としての制御部の他、自車位置を検出する手段としての自車位置検出部110と、地図データベース部120とを備えている。
【0028】
自車位置検出部110は、GPSアンテナ111を有するGPS(Global Positioning System)航法ユニットと、車速パルスセンサや加速度センサ等の各種センサを有する自立航法ユニットとを備えている。GPS航法ユニットは、GPSレシーバを備え、測位衛星からの受信電波に基づいて自車位置を検出するものである。自立航法ユニットは、車速パルスセンサからのセンサ信号や加速度センサからのセンサ信号に基づいて車両2の速度(移動距離)や移動方向を検出し車両2外部(例えばGPS衛星)からの信号を用いずに自車位置を検出するものである。かかる構成により、自車位置検出部110は、GPS航法と自立航法とのハイブリット航法により、自車位置を精度よく計算可能となっている。
【0029】
地図データベース部120は、地図データ121を格納するものであり、ハードディスク装置或いは光ディスク装置等の記憶手段を備えている。図3は、地図データベース部120に格納されている地図データ121の構成を模式的に示す図である。
【0030】
図3に示すように、地図データ121には、予め設定された複数のサービスエリア202の中心を示す制御局ポイント200の位置情報(座標情報)と、当該制御局ポイント200、すなわち、サービスエリア202を一意に特定するための制御局ポインコード(識別情報)201と、制御局ポイント200を中心としたサービスエリア202のサイズ(半径)Rとが登録されている。各制御局ポイント200は、隣接するサービスエリア202が互いに重なり合うように地図上に配置されており、これにより途切れることの無い車々間通信が可能となる。
【0031】
なお、本実施形態におけるサービスエリア202は、一般的な固定基地局が形成する移動端末との無線通信可能範囲ではなく、地図上において、通信可能領域を複数のエリアに分割してなるエリアを指す。このサービスエリア202の配置(すなわち、制御局ポイント200の設定位置)は、電波環境測定データや交通量情報等に基づき最も有利な通信状態が得られるポイントに配置するのが望ましく、また、一定間隔で幾何学的な配置を取ることも可能である。また、同図に示す制御局ポイント200の位置情報等は、地図データ121に付加する構成に限らず、上記制御局ポイント200ごと、すなわち、制御局ポイントコード201ごとに、その位置情報と、サービスエリア202のサイズとがテーブルデータとして地図データ121と別途に格納される構成としても良い。
【0032】
さて、かかる構成の下、車載ナビゲーション装置11は、上記自車位置検出部110にて計算された自車位置に基づいて、自車両2が在圏しているサービスエリア202及びその制御局ポイントコード201を上記地図データベース部120に格納されているデータを検索することで特定し、車々間通信機10に出力する。そして、車々間通信機10は、車載ナビゲーション装置11から制御局ポイントコード201を取得すると、当該制御局ポイントコード201を通信データに付加して通信する。
【0033】
ここで、本実施の形態にかかる車々間通信システム1においては、車々間通信機10が送受する通信データ250として、制御パケット250aと、データパケット250bとの2種類の通信データが用いられる。図4は、制御パケット250aとデータパケット250bとの構成を模式的に示す図である。
【0034】
制御パケット250aは、制御局モードで動作する車々間通信機10、すなわち、車々間制御通信機10aが通信タイミングの制御のために一定の時間間隔で定期的に送出する通信データである。この制御パケット250aのパケットヘッダには、上記車載ナビゲーション装置11から出力された制御局ポイントコード201と、IDと、距離と、速度とが含まれ、これに通信タイミング制御情報がデータとして付加されて制御パケット250aが構成されている。
【0035】
IDは車々間通信機10を一意に特定する識別情報であり、距離は自車位置から制御局ポイント200(サービスエリアの中心位置)までの距離を示すものであり、また、速度は車両2の移動速度を、走行方向と共に示すものである。
【0036】
通信タイミング制御情報は、スロット同期通信等に用いられる、いわゆるビーコンパケットと略同等な情報が格納される。詳述すると、通信タイミング制御情報は、時分割された通信スロットのうち何番目のスロットにて当該制御パケット250aが送信されたかを示す情報である。従って、被制御局モードで動作する車々間通信機10、すなわち、車々間被制御通信機10bは、この制御パケット250aを受信することで、制御パケット250aの受信タイミングを同期ポイントとして同期をとると共に、通信タイミング制御情報に基づいてデータを送信すべき期間(タイミング)を特定することとなる。
【0037】
データパケット250bは、各車々間通信機10の間で送受するデータ(情報)を送信するための通信パケットである。このデータパケット250bのパケットヘッダには、制御パケット250aと同様に、上記車載ナビゲーション装置11から出力された制御局ポイントコード201と、IDと、距離と、速度とが含まれ、これに各車々間通信機10の間で送受するデータが付加されてデータパケット250bが構成されている。
【0038】
このように、本実施の形態にかかる車々間通信システム1にあっては、車々間制御通信機10aが制御パケット250aを送信する際に、通信タイミング制御情報に制御局ポイントコード201を付加して送信することで、同一のサービスエリア202に存在する他の車々間通信機10に対して当該通信タイミング制御情報に基づいて通信同期を確立し通信データを送受する旨を明示する構成となっている。
【0039】
また、本実施の形態では、制御局パケット250a及びデータパケット250bの各々に、ID、距離及び速度を含める構成とし、車々間通信機10の各々が、同一のサービスエリア202に存在する各車両2の自車位置や移動速度、移動方向を取得可能となっている。
【0040】
次いで、本実施の形態の動作について説明する。以下の動作説明においては、まず、車両2が新たなサービスエリアに進入した際に、この車両2に搭載された車々間通信機10が制御局モード及び被制御局モードのいずれかの動作モードを選択・実行するときの動作について説明する。
【0041】
図5は、かかる動作モード選択・実行処理を示すフローチャートである。この図に示すように、車載ナビゲーション装置11による自車位置検出により、車両2が新たなサービスエリア202に進入したことを車々間通信機10が検知すると、車々間通信機10は、先ず、このサービスエリア202内で他の車々間通信機10から制御パケット250aが既に送信されているかを検知するために、受信待機状態に移行して、当該サービスエリア内で送受されている全ての通信データの受信を行うための処理を実行する(ステップS101)。
【0042】
具体的には、車々間通信機10は、車載ナビゲーション装置11から、現在のサービスエリアの制御局ポイントコード201を受信し(ステップS102)、そして、この制御局ポイントコード201が付加された制御パケット250aを受信すべく受信待機状態に移行し(ステップS103)、予め設定された一定時間の間、制御パケット250aの受信を試みる(ステップS104)。
【0043】
車々間通信機10は、この受信待機状態の間に制御パケット250aを受信できた場合(ステップS104:YES)、既に他の車々間通信機10により、通信タイミングの制御が実施されているため、その制御パケット250aに基づいて通信同期を確立すべく、動作モードを被制御局モードに移行する(ステップS105)。
【0044】
一方、車々間通信機10は、受信待機状態に移行したときから一定時間が経過しても、制御パケット250aを受信できなかった場合には(ステップS104:NO)、当該サービスエリア内に制御局モードで動作する車々間通信機10が存在しないことを意味するため、動作モードを制御局モードに移行して、当該サービスエリアの制御局ポイントコード201を付加した制御パケット250aを定期的に送出する動作を開始する(ステップS106)。
【0045】
以上の処理により、車々間通信機10は、制御局モードまたは被制御局モードのいずれかの動作モードを決定し、その後に、車々間で通信データ(データパケット250b)の送受を行うこととなる。
【0046】
ところで、制御局モードで動作する車々間制御通信機10aが現在のサービスエリア202の外に出る等した場合には、現在のサービスエリア202内の通信タイミングを制御する車々間通信機10が存在しなくなるため、制御局モードで動作する車々間制御通信機10aを新たに選定する必要がある。
【0047】
そこで、上記車々間制御通信機10aがサービスエリア202を抜ける際に、その旨をサービスエリア202内に残る車々間通信機10に対して送信し、そして、これらの車々間通信機10の中から、制御モードで動作する車々間制御通信機10aを出現させるようにする。しかしながら、この場合、サービスエリア202に残る車々間通信機10が各々独立して車々間制御通信機10aとして動作しようとすると、車々間制御通信機10aが同時に複数発生してしまう可能性かあり、無線データ通信用のバケットか相互に衝突する等して、システム運用に障害か発生する恐れがある。
【0048】
これを避けるために、車々間制御通信機10aがサービスエリア202の外に抜けるときに、その他の車々間通信機10の各々が、制御局モードで動作している車々間制御通信機10aが新たに存在しているかという確認するための観測期間を充分長くとれば良いものの、その観測期間の間、データ通信ができなくなるといった問題がある。さらに、新たに制御局モードで動作することとなった車々間制御通信機10aか、すぐにサービスエリア202を出てしまうと、車々間制御通信機10aの選出を再度行う必要があり、このようなことが連続すると、車々間通信システム1における通信の安定性が阻害され兼ねない。
【0049】
そこで本実施の形態では、次のようにして、制御局モードで動作する車々間制御通信機10aがサービスエリア202内に常時安定的に存在するようにしている。すなわち、制御局モードで動作する車々間制御通信機10aがサービスエリア202を抜ける前に、当該車々間通信制御通信機10aが、サービスエリア202内の他の車々間通信機10の中から、車々間制御通信機10aの役割を担うべき車々間通信機10、すなわち、サービスエリア202に最も長く滞在する可能性の高い車々間通信機10を選定するようにしている。
【0050】
さらに詳述すると、本実施の形態では、制御局モードで動作する車々間制御通信機10aは、サービスエリア202内に存在する車々間通信機10(被制御局モードで動作する車々間被制御通信機10b)の各々の制御局ポイント200(サービスエリアの中心位置)までの距離と、移動速度(移動方向を含む)とを監視する位置監視テーブルをRAM等に生成し、サービスエリア202内で送受されている通信データ(制御パケット250a及びデータパケット250b)を受信するごとに、この通信データに含まれる上述したID、距離及び速度に基づいて、上記位置監視テーブルを逐次更新するように構成されている。
【0051】
そして、この車々間制御通信機10aがサービスエリア202から抜け出る場合に、位置監視テーブルに登録されている車々間通信機10の中から、最も長く滞在する可能性の高い車々間通信機10を選定し、この車々間通信機10の動作モードを制御局モードへ切り替えさせるようにしている。なお、本実施の形態では、各車々間通信機10が上記ID、距離及び速度を間欠的(例えば1秒ごと)に送信しており、車々間制御通信機10aが、同一サービスエリア202に存在する全ての車々間通信機10の位置、移動速度及び移動方向を逐次監視可能となっている。
【0052】
図6は、車々間制御通信機10aの選定及び切り替え動作を示すシーケンス図である。この図に示すように、現時点において制御局モードで動作している車々間制御通信機10aが、サービスエリア202を抜け出し他のサービスエリア202に移動する前に、現在のサービスエリア202内での車々間制御通信機10aの切替条件が成立する(ステップS201)。詳述すると、本実施の形態では、図7に示すように、車々間制御通信機10aが制御局ポイント200(サービスエリア202の中心)から所定距離Rthだけ離れ、なおかつ、この制御局ポイント200から遠ざかる方向に移動している場合に、切替条件が成立する。本実施の形態では、所定距離Rthを、サービスエリア202の半径Rの約80%としている。
【0053】
車々間制御通信機10aは、車載ナビゲーション装置11の出力に基づいて上記切替条件が成立したことを検知した後、上述した位置監視テーブルを探索して、現在のサービスエリア202に最も長く滞在する可能性の高い車々間通信機10を選定する(ステップS202)。具体的には、車々間制御通信機10aは、現時点において、例えば制御局ポイント200からサービスエリア202の半径Rに対して約75%程度の距離だけ離れた場所に位置し、なおかつ、制御局ポイント200に向かって移動している車々間通信機10を条件として位置監視テーブルを探索し、この条件に該当する車々間通信機10を選定する(例えば、図7にて矢印Aで示す車々間通信機10)。なお、この条件に該当する車々間通信機10が複数存在する場合には、より低速で移動している車々間通信機10を選定する。一方、この条件に該当する車々間通信機10が存在しない場合には、制御局ポイント200に近づく方向に移動している車々間通信機10のうち制御局ポイント200から最も遠い車々間通信機10、或いは、制御局ポイント200から遠ざかる方向に移動している車々間通信機10のうち制御局ポイント200から最も近い車々間通信機10を選定することとなる。
【0054】
車々間制御通信機10aは、次の車々間制御通信機10aとなるのに最適な車々間通信機10の選定が終了するまで、上記位置監視テーブルの探索を続け、その選定が終了した場合には(ステップS203:YES)、その車々間通信機10の動作モードを被制御局モードから制御局モードに変更させるべく次の処理を実行する。すなわち、車々間制御通信機10aは、選定した車々間通信機10に対して、制御局モードへの動作切り替えを指示する制御局モード切替指示パケットを制御パケット250aとして送信する(ステップS204)。
【0055】
車々間制御通信機10aにより選定された車々間通信機10が制御局モード切替指示パケットを受信すると(ステップS205)、自機の動作モードを被制御局モードから制御局モードに移行し(ステップS206)、動作モードの切り替え完了を示す切替完了通知パケットを車々間制御通信機10aに送信する(ステップS207)。一方、車々間制御通信機10aは、切替完了通知パケットを受信すると(ステップS208)、動作モードを制御局モードから被制御局モードへ移行する(ステップS209)。
【0056】
以上の処理により、サービスエリア202内において制御局モードで動作する車々間制御通信機10aが切り替えられることとなる。なお、車々間制御通信機10aが制御局モード切替指示パケットを送信した後、一定時間が経過しても応答が無い場合、或いは、制御局モードへの切り替えが拒否された場合は、ステップS202に処理手順を戻し、再度、車々間通信機10の選定を実行し直すようにしても良い。本実施の形態においては、車々間制御通信機10aは、サービスエリア202を抜けるときではなく、上記のように制御局ポイント200から所定距離だけ離れたときに、車々間制御通信機10aを切り替えるようにするため、選定した車々間通信機10が制御局モードに移行しなかった場合でも、新たな車々間通信機10を選定するための時間を充分に確保することが可能である。
【0057】
以上説明したように、本実施の形態によれば、車々間通信機10の各々が、通信データを送信する場合に、現在在圏するサービスエリア202の制御局ポイントコード201を付加して送信するようにしたため、他のサービスエリアで送受されている通信データとの干渉を防止することができる。
【0058】
また、本実施の形態によれば、車々間通信機10の各々が制御局モードと被制御局モードとの2つの動作モードを有し、新たなサービスエリアに進入した際に、通信タイミングを規定する制御情報たる制御パケット250aを受信できなかった場合に、制御局モードにて動作し、同一のサービスエリアに存在する他の車々間通信機10に対して制御パケット250aを送信する構成であるため、路側等に制御パケットを送信するためのインフラを設ける必要が無く、なおかつ、不特定多数の一般の車両2の間で簡単に車々間通信システムを構築することが可能となる。
【0059】
さらに本実施の形態によれば、制御局モードで動作している車々間通信機10(車々間制御通信機10a)が、現在在圏するサービスエリア202を抜け出る場合、同一のサービスエリア202内に存在する他の車々間通信機10のいずれか一つの車々間通信機10に対して制御局モードで動作することを指示するようにしたため、制御局モードで動作する車々間通信機10をサービスエリア202内に安定的に存在させることができる。
【0060】
特に、制御局モードで動作している車々間通信機10(車々間制御通信機10a)は、サービスエリア202に滞在する時間が最も長い可能性のある車々間通信機10を選定し、この選定した車々間通信機10に対して制御局モードで動作することを指示するようにしたため、制御局モードで動作する車々間通信機10の切り替え頻度を削減でき、これにより、制御局モードで動作する車々間通信機10の切り替え時に発生する恐れのある通信データの衝突や隠れ端末問題等を回避し、安定した通信を実現可能となる。
【0061】
上述した実施の形態は、あくまでも本発明の一態様であり、本発明の範囲内で任意に変形可能である。
【0062】
例えば、上記実施の形態では、車載ナビゲーション装置11と車々間通信機10とを別体として設ける構成としたが、これらを一体とする構成としても良い。すなわち、車々間通信機10に、上記自車位置検出部110や地図データベース部120等を設ける構成とし、車々間通信機10が現在の位置検出やサービスエリア202及び制御局ポイント200の識別情報の特定を行う構成としても良い。
【0063】
また例えば、上記実施の形態において、同一のサービスエリア内では、当該サービスエリアの制御局ポイントコード201を識別情報として通信データに付加して送受することで、他のサービスエリアにて送受される通信データとの干渉を防止する構成としたが、これに加えて、更に、互いに隣接するサービスエリアの各々に割り当てる無線周波数チャンネルを互いに異ならせるか、或いは、互いに隣接するサービスエリアの各々での通信タイミングを互いに異ならせることで、通信データの干渉発生を防止する効果をより高めることが可能となる。なお、隣接サービスエリアの各々で通信タイミングを異ならせるには、例えば車々間通信機10或いは車載ナビゲーション装置11が、各サービスエリアでの通信タイミングを規定するサービスタイミング情報を予め記憶し、このサービスタイミング情報に基づいて制御パケット250aの送受動作を実行する構成とすれば良い。サービスタイミング情報には、例えば、GPS信号から得られる絶対時間を基準とした通信タイミング情報などを用いることが可能である。
【図面の簡単な説明】
【0064】
【図1】本発明の実施の形態にかかる車々間通信システムの構成を模式的に示す図である。
【図2】車々間通信機及び車載ナビゲーション装置の機能的構成を示すブロック図である。
【図3】地図データを模式的に示す図である。
【図4】通信データとして送受する制御パケット及びデータパケットの構成を示す図である。
【図5】動作モード選択移行処理を示すフローチャートである。
【図6】制御局モードで動作する車々間通信機の切替処理を示すフローチャートである。
【図7】制御局モードで動作する車々間通信機の切り替え時の動作を説明するための図である。
【符号の説明】
【0065】
1 車々間通信システム
2 車両
10 車々間通信機
10a 車々間制御通信機
10b 車々間被制御通信機
11 車載ナビゲーション装置
110 自車位置検出部
120 地図データベース部
121 地図データ
201 制御局ポイントコード
202 サービスエリア
250 通信データ
250a 制御パケット
250b データパケット
【特許請求の範囲】
【請求項1】
複数の車両の各々に搭載される車々間通信機を複数備え、これらの車々間通信機が互いに無線通信する車々間通信システムにおいて、
前記車々間通信機は、
予め設定された複数のサービスエリアのうち、現在在圏しているサービスエリアの識別情報を取得するサービスエリア識別情報取得手段と、
現在在圏するサービスエリアの識別情報を送信する情報に付加して送信する送信手段と、
現在在圏するサービスエリア内での通信タイミングを規定する制御情報を受信する制御情報受信手段と、
前記制御情報受信手段により前記制御情報が受信されない場合に、現在在圏するサービスエリアの前記制御情報を生成し、同一のサービスエリアに存在する他の車々間通信機に向けて前記送信手段に順次送信させる第1送信制御手段と、
前記第1送信制御手段が前記制御情報を前記送信手段に順次送信させているときに、現在在圏するサービスエリアを抜け出る場合、同一のサービスエリア内に存在する他の車々間通信機のいずれか一つの車々間通信機に対して前記制御情報の送信動作を行うことを指示する指示信号を前記送信手段に送信させる第2送信制御手段と
を具備することを特徴とする車々間通信システム。
【請求項2】
前記第2送信制御手段は、
同一のサービスエリア内に存在する他の車々間通信機の各々が当該サービスエリアに滞在する時間に基づいて、これらの車々間通信機の中から一つの車々間通信機を選定し、この選定した車々間通信機に対して前記指示信号を前記送信手段に送信させる
ことを特徴とする請求項1に記載の車々間通信システム。
【請求項3】
前記第2送信制御手段は、
同一のサービスエリア内に存在する他の車々間通信機の中から、当該サービスエリアに滞在する時間が最も長い可能性のある車々間通信機を選定し、この選定した車々間通信機に対して前記指示信号を前記送信手段に送信させる
ことを特徴とする請求項1または2に記載の車々間通信システム。
【請求項4】
前記車々間通信機は、
自機が搭載された前記車両の現在位置、移動速度及び移動方向を取得する移動情報取得手段と、
前記現在位置、移動速度及び移動方向を間欠的に前記送信手段に送信させる第3送信制御手段と、
同一のサービスエリア内に存在する他の車々間通信機から送信されてきた各々の車々間通信機の現在位置、移動速度及び移動方向を受信する位置情報受信手段と、
前記位置情報受信手段により受信された前記現在位置、移動速度及び移動方向を、車々間通信機ごとに記憶する記憶手段とを更に備え、
前記第2送信制御手段は、
前記記憶手段に記憶されている車々間通信機の現在位置、移動速度及び移動方向に基づいて、現在在圏するサービスエリアに滞在する時間が最も長い可能性のある車々間通信機を選定し、この選定した車々間通信機に対して前記指示信号を前記送信手段に送信させる
ことを特徴とする請求項3に記載の車々間通信システム。
【請求項5】
前記第2制御手段は、
前記第1送信制御手段が前記制御情報を順次送信しているとき、現在在圏するサービスエリアの中心から所定距離だけ離れ、なおかつ、当該サービスエリアの中心から遠ざかる方向に移動している場合に、同一のサービスエリア内に存在する他の車々間通信機のいずれか一つの車々間通信機に対して前記指示信号を送信する
ことを特徴とする請求項1乃至4のいずれかに記載の車々間通信システム。
【請求項6】
前記車々間通信機は、
前記指示信号を送信した車々間通信機からの応答を受信する応答受信手段を更に備え、
前記応答受信手段により前記車々間通信機が前記制御情報の送信動作を実行する旨が示された場合には、前記制御情報の送信を停止する
ことを特徴とする請求項1乃至5のいずれかに記載の車々間通信システム。
【請求項7】
車両に搭載された、他の通信機と無線通信する車々間通信機において、
予め設定された複数のサービスエリアのうち、現在在圏しているサービスエリアの識別情報を取得するサービスエリア識別情報取得手段と、
現在在圏するサービスエリアの識別情報を送信する情報に付加して送信する送信手段と、
現在在圏するサービスエリア内での通信タイミングを規定する制御情報を受信する制御情報受信手段と、
前記制御情報受信手段により前記制御情報が受信されない場合に、現在在圏するサービスエリアの前記制御情報を生成し、同一のサービスエリアに存在する他の通信機に向けて前記送信手段に順次送信させる第1送信制御手段と、
前記第1送信制御手段が前記制御情報を前記送信手段に順次送信させているときに、現在在圏するサービスエリアを抜け出る場合、同一のサービスエリア内に存在する他の通信機のいずれか一つの通信機に対して前記制御情報の送信動作を行うことを指示する指示信号を前記送信手段に送信させる第2送信制御手段と
を具備することを特徴とする車々間通信機。
【請求項8】
前記第2送信制御手段は、
同一のサービスエリア内に存在する他の通信機の各々が当該サービスエリアに滞在する時間に基づいて、これらの通信機の中から一つの通信機を選定し、この選定した通信機に対して前記指示信号を前記送信手段に送信させる
ことを特徴とする請求項7に記載の車々間通信機。
【請求項9】
前記第2送信制御手段は、
同一のサービスエリア内に存在する他の通信機の中から、当該サービスエリアに滞在する時間が最も長い可能性のある通信機を選定し、この選定した通信機に対して前記指示信号を前記送信手段に送信させる
ことを特徴とする請求項7または8に記載の車々間通信機。
【請求項10】
同一のサービスエリア内に存在する他の通信機から送信された各々の通信機の現在位置、移動速度及び移動方向を受信する位置情報受信手段と、
前記位置情報受信手段により受信された前記現在位置、移動速度及び移動方向を、通信機ごとに記憶する記憶手段とを更に備え、
前記第2送信制御手段は、
前記記憶手段に記憶されている通信機の現在位置、移動速度及び移動方向に基づいて、現在在圏するサービスエリアに滞在する時間が最も長い可能性のある通信機を選定し、この選定した通信機に対して前記指示信号を前記送信手段に送信させる
ことを特徴とする請求項9に記載の車々間通信機。
【請求項11】
自機が搭載された前記車両の現在位置、移動速度及び移動方向を取得する移動情報取得手段を更に備え、
前記第2制御手段は、
前記第1送信制御手段が前記制御情報を順次送信しているとき、現在在圏するサービスエリアの中心から所定距離だけ離れ、なおかつ、当該サービスエリアの中心から遠ざかる方向に移動している場合に、同一のサービスエリア内に存在する他の通信機のいずれか一つの通信機に対して前記指示信号を送信する
ことを特徴とする請求項7乃至10のいずれかに記載の車々間通信機。
【請求項12】
前記指示信号を送信した通信機からの応答を受信する応答受信手段を更に備え、
前記応答受信手段により前記通信機が前記制御情報の送信動作を実行する旨が示された場合には、前記制御情報の送信を停止する
ことを特徴とする請求項7乃至11のいずれかに記載の車々間通信機。
【請求項1】
複数の車両の各々に搭載される車々間通信機を複数備え、これらの車々間通信機が互いに無線通信する車々間通信システムにおいて、
前記車々間通信機は、
予め設定された複数のサービスエリアのうち、現在在圏しているサービスエリアの識別情報を取得するサービスエリア識別情報取得手段と、
現在在圏するサービスエリアの識別情報を送信する情報に付加して送信する送信手段と、
現在在圏するサービスエリア内での通信タイミングを規定する制御情報を受信する制御情報受信手段と、
前記制御情報受信手段により前記制御情報が受信されない場合に、現在在圏するサービスエリアの前記制御情報を生成し、同一のサービスエリアに存在する他の車々間通信機に向けて前記送信手段に順次送信させる第1送信制御手段と、
前記第1送信制御手段が前記制御情報を前記送信手段に順次送信させているときに、現在在圏するサービスエリアを抜け出る場合、同一のサービスエリア内に存在する他の車々間通信機のいずれか一つの車々間通信機に対して前記制御情報の送信動作を行うことを指示する指示信号を前記送信手段に送信させる第2送信制御手段と
を具備することを特徴とする車々間通信システム。
【請求項2】
前記第2送信制御手段は、
同一のサービスエリア内に存在する他の車々間通信機の各々が当該サービスエリアに滞在する時間に基づいて、これらの車々間通信機の中から一つの車々間通信機を選定し、この選定した車々間通信機に対して前記指示信号を前記送信手段に送信させる
ことを特徴とする請求項1に記載の車々間通信システム。
【請求項3】
前記第2送信制御手段は、
同一のサービスエリア内に存在する他の車々間通信機の中から、当該サービスエリアに滞在する時間が最も長い可能性のある車々間通信機を選定し、この選定した車々間通信機に対して前記指示信号を前記送信手段に送信させる
ことを特徴とする請求項1または2に記載の車々間通信システム。
【請求項4】
前記車々間通信機は、
自機が搭載された前記車両の現在位置、移動速度及び移動方向を取得する移動情報取得手段と、
前記現在位置、移動速度及び移動方向を間欠的に前記送信手段に送信させる第3送信制御手段と、
同一のサービスエリア内に存在する他の車々間通信機から送信されてきた各々の車々間通信機の現在位置、移動速度及び移動方向を受信する位置情報受信手段と、
前記位置情報受信手段により受信された前記現在位置、移動速度及び移動方向を、車々間通信機ごとに記憶する記憶手段とを更に備え、
前記第2送信制御手段は、
前記記憶手段に記憶されている車々間通信機の現在位置、移動速度及び移動方向に基づいて、現在在圏するサービスエリアに滞在する時間が最も長い可能性のある車々間通信機を選定し、この選定した車々間通信機に対して前記指示信号を前記送信手段に送信させる
ことを特徴とする請求項3に記載の車々間通信システム。
【請求項5】
前記第2制御手段は、
前記第1送信制御手段が前記制御情報を順次送信しているとき、現在在圏するサービスエリアの中心から所定距離だけ離れ、なおかつ、当該サービスエリアの中心から遠ざかる方向に移動している場合に、同一のサービスエリア内に存在する他の車々間通信機のいずれか一つの車々間通信機に対して前記指示信号を送信する
ことを特徴とする請求項1乃至4のいずれかに記載の車々間通信システム。
【請求項6】
前記車々間通信機は、
前記指示信号を送信した車々間通信機からの応答を受信する応答受信手段を更に備え、
前記応答受信手段により前記車々間通信機が前記制御情報の送信動作を実行する旨が示された場合には、前記制御情報の送信を停止する
ことを特徴とする請求項1乃至5のいずれかに記載の車々間通信システム。
【請求項7】
車両に搭載された、他の通信機と無線通信する車々間通信機において、
予め設定された複数のサービスエリアのうち、現在在圏しているサービスエリアの識別情報を取得するサービスエリア識別情報取得手段と、
現在在圏するサービスエリアの識別情報を送信する情報に付加して送信する送信手段と、
現在在圏するサービスエリア内での通信タイミングを規定する制御情報を受信する制御情報受信手段と、
前記制御情報受信手段により前記制御情報が受信されない場合に、現在在圏するサービスエリアの前記制御情報を生成し、同一のサービスエリアに存在する他の通信機に向けて前記送信手段に順次送信させる第1送信制御手段と、
前記第1送信制御手段が前記制御情報を前記送信手段に順次送信させているときに、現在在圏するサービスエリアを抜け出る場合、同一のサービスエリア内に存在する他の通信機のいずれか一つの通信機に対して前記制御情報の送信動作を行うことを指示する指示信号を前記送信手段に送信させる第2送信制御手段と
を具備することを特徴とする車々間通信機。
【請求項8】
前記第2送信制御手段は、
同一のサービスエリア内に存在する他の通信機の各々が当該サービスエリアに滞在する時間に基づいて、これらの通信機の中から一つの通信機を選定し、この選定した通信機に対して前記指示信号を前記送信手段に送信させる
ことを特徴とする請求項7に記載の車々間通信機。
【請求項9】
前記第2送信制御手段は、
同一のサービスエリア内に存在する他の通信機の中から、当該サービスエリアに滞在する時間が最も長い可能性のある通信機を選定し、この選定した通信機に対して前記指示信号を前記送信手段に送信させる
ことを特徴とする請求項7または8に記載の車々間通信機。
【請求項10】
同一のサービスエリア内に存在する他の通信機から送信された各々の通信機の現在位置、移動速度及び移動方向を受信する位置情報受信手段と、
前記位置情報受信手段により受信された前記現在位置、移動速度及び移動方向を、通信機ごとに記憶する記憶手段とを更に備え、
前記第2送信制御手段は、
前記記憶手段に記憶されている通信機の現在位置、移動速度及び移動方向に基づいて、現在在圏するサービスエリアに滞在する時間が最も長い可能性のある通信機を選定し、この選定した通信機に対して前記指示信号を前記送信手段に送信させる
ことを特徴とする請求項9に記載の車々間通信機。
【請求項11】
自機が搭載された前記車両の現在位置、移動速度及び移動方向を取得する移動情報取得手段を更に備え、
前記第2制御手段は、
前記第1送信制御手段が前記制御情報を順次送信しているとき、現在在圏するサービスエリアの中心から所定距離だけ離れ、なおかつ、当該サービスエリアの中心から遠ざかる方向に移動している場合に、同一のサービスエリア内に存在する他の通信機のいずれか一つの通信機に対して前記指示信号を送信する
ことを特徴とする請求項7乃至10のいずれかに記載の車々間通信機。
【請求項12】
前記指示信号を送信した通信機からの応答を受信する応答受信手段を更に備え、
前記応答受信手段により前記通信機が前記制御情報の送信動作を実行する旨が示された場合には、前記制御情報の送信を停止する
ことを特徴とする請求項7乃至11のいずれかに記載の車々間通信機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2006−20116(P2006−20116A)
【公開日】平成18年1月19日(2006.1.19)
【国際特許分類】
【出願番号】特願2004−196499(P2004−196499)
【出願日】平成16年7月2日(2004.7.2)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成18年1月19日(2006.1.19)
【国際特許分類】
【出願日】平成16年7月2日(2004.7.2)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]