
車々間通信制御システム、車載通信システムおよび通信状態表示装置

【課題】 複雑な制御を必要とすることなく、第1の車載通信装置と第2の車載通信装置とが車々間通信を他の車々間通信や路車間通信と衝突したり干渉したりすることなく適切に行えるようにする。
【解決手段】 先行車両5に搭載されている通信状態表示装置51は、車載通信装置52の通信状態を表示し、一方、後続車両2に搭載されている車載通信システム21は、通信状態表示装置52を撮影して撮影画像を画像解析して車載通信装置51の通信状態を識別すると共に、後続車両2と先行車両5との位置関係を識別し、他の車々間通信や路車間通信に影響を及ぼさない前後車両用通信装置22と車載通信装置52とが行い得る車々間通信の通信方法を特定する。
【解決手段】 先行車両5に搭載されている通信状態表示装置51は、車載通信装置52の通信状態を表示し、一方、後続車両2に搭載されている車載通信システム21は、通信状態表示装置52を撮影して撮影画像を画像解析して車載通信装置51の通信状態を識別すると共に、後続車両2と先行車両5との位置関係を識別し、他の車々間通信や路車間通信に影響を及ぼさない前後車両用通信装置22と車載通信装置52とが行い得る車々間通信の通信方法を特定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、第1の車両に搭載されている第1の車載通信装置と第2の車両に搭載されている第2の車載通信装置とが行う車々間通信を制御する車々間通信制御システム、前記車々間通信制御システム内で用いられる車載通信システムおよび通信状態表示装置に関する。
【背景技術】
【0002】
従来より、第1の車両に搭載されている第1の車載通信装置と第2の車両に搭載されている第2の車載通信装置とが車々間通信を行う車々間通信システムが供されている(例えば特許文献1参照)。
【特許文献1】特開2002−74577号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、この種の車々間通信システムでは、第1の車載通信装置と第2の車載通信装置とが行う車々間通信が例えば他の車両に搭載されている他の車載通信装置との間で行う他の車々間通信や路側に設置されている路側機との間で行う路車間通信と衝突したり干渉したりすることを未然に回避するために他の車々間通信や路車間通信を監視して通信媒体や通信チャネルを選択する必要がある。しかしながら、他の車々間通信や路車間通信を監視するには、複雑な制御を必要とするという問題がある。
【0004】
本発明は、上記した事情に鑑みてなされたものであり、その目的は、複雑な制御を必要とすることなく、第1の車載通信装置と第2の車載通信装置とが車々間通信を他の車々間通信や路車間通信と衝突したり干渉したりすることなく適切に行うことができる車々間通信制御システム、車載通信システムおよび通信状態表示装置を提供することにある。
【課題を解決するための手段】
【0005】
請求項1に記載した車々間通信制御システムによれば、第2の車両に搭載されている通信状態表示装置は、第2の車載通信装置の通信状態を表す表示情報を表示する。一方、第1の車両に搭載されている車載通信システムは、通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して第2の車載通信装置の通信状態を識別すると共に、第1の車両と第2の車両との位置関係を識別し、それら識別された第2の車載通信装置の通信状態および第1の車両と第2の車両との位置関係に基づいて他の車々間通信や路車間通信に影響を及ぼさない第1の車載通信装置と第2の車載通信装置とが行い得る車々間通信の通信方法を特定し、その特定された通信方法にしたがって第1の車載通信装置と第2の車載通信装置とが車々間通信を行うように制御する。
【0006】
これにより、第2の車両に搭載されている通信状態表示装置では、第2の車載通信装置の通信状態を表す表示情報を表示し、一方、第1の車両に搭載されている車載通信システムでは、第2の車両に搭載されている通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析することにより、他の車々間通信や路車間通信に影響を及ぼさない第1の車載通信装置と第2の車載通信装置とが行い得る車々間通信の通信方法を特定することができるので、従来のものとは異なって、複雑な制御を必要とすることなく、第1の車載通信装置と第2の車載通信装置とが車々間通信を他の車々間通信や路車間通信と衝突したり干渉したりすることなく適切に行うことができる。
【0007】
請求項2に記載した車々間通信制御システムによれば、通信状態表示装置は、第2の車載通信装置の通信媒体の使用状態を表す表示情報を表示し、一方、車載通信システムは、通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して第2の車載通信装置の通信媒体の使用状態を識別する。これにより、他の車々間通信や路車間通信に影響を及ぼさない第1の車載通信装置と第2の車載通信装置とが行い得る車々間通信の通信媒体(ミリ波、マイクロ波およびレーザなど)を適切に特定することができ、その特定された通信媒体にしたがって第1の車載通信装置と第2の車載通信装置とが車々間通信を適切に行うことができる。
【0008】
請求項3に記載した車々間通信制御システムによれば、通信状態表示装置は、第2の車載通信装置の通信チャネルの使用状態を表す表示情報を表示し、一方、車載通信システムは、通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して第2の車載通信装置の通信チャネルの使用状態を識別する。これにより、他の車々間通信や路車間通信に影響を及ぼさない第1の車載通信装置と第2の車載通信装置とが行い得る車々間通信の通信チャネルを適切に特定することができ、その特定された通信チャネルにしたがって第1の車載通信装置と第2の車載通信装置とが車々間通信を適切に行うことができる。
【0009】
請求項4に記載した車々間通信制御システムによれば、車載通信システムは、撮影画像を画像解析して第2の車両の現在位置を検出し、第1の車両と第2の車両との位置関係を識別する。これにより、第2の車両の現在位置を検出するための専用の装置を必要とすることなく第2の車両の現在位置を検出することができる。
【0010】
請求項5に記載した車々間通信制御システムによれば、車載通信システムは、第1の車両と第2の車両との位置関係に基づいて第1の車載通信装置から放射される電波が第2の車載通信装置に捕捉されるように電波の放射方向を決定し、その決定された放射方向へ第1の車載通信装置からの電波の放射を開始させ、第1の車載通信装置と第2の車載通信装置とが車々間通信を開始するように制御する。これにより、第1の車載通信装置から第2の車載通信装置へ向けての電波の放射を適切に開始することができ、第1の車載通信装置と第2の車載通信装置とが車々間通信を適切に開始することができる。
【0011】
請求項6に記載した車々間通信制御システムによれば、車載通信システムは、第1の車載通信装置からの電波の放射を開始させた以後では、撮影画像から所定時間経過後の撮影画像に対応する予測画像フレームを作成し、過去の撮影画像から作成された予測画像フレームに対応する画像と現在の撮影画像とを比較して第2の車両の進行方向を予測し、その予測された進行方向に基づいて第1の車載通信装置からの電波の放射方向を調整する。これにより、第1の車載通信装置から第2の車載通信装置へ向けて電波の放射を開始した以後も、第1の車載通信装置から第2の車載通信装置へ向けての電波の放射を適切に継続することができ、第1の車載通信装置と第2の車載通信装置とが車々間通信を中断することなく適切に継続して行うことができる。
【0012】
請求項7に記載した車載通信システムによれば、第1の車両に搭載されている第1の車載通信装置と第2の車両に搭載されている第2の車載通信装置とが行う車々間通信を制御する車々間通信制御システム内にあって第1の車両に搭載され、第2の車両に搭載されている通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して第2の車載通信装置の通信状態を識別すると共に、第1の車両と第2の車両との位置関係を識別し、それら識別された第2の車載通信装置の通信状態および第1の車両と第2の車両との位置関係に基づいて他の車々間通信や路車間通信に影響を及ぼさない第1の車載通信装置と第2の車載通信装置とが行い得る車々間通信の通信方法を特定し、その特定された通信方法にしたがって第1の車載通信装置と第2の車載通信装置とが車々間通信を行うように制御する。これにより、上記した車々間通信制御システム内の通信状態表示装置と共に用いられることにより、上記した請求項1に記載したものと同様の作用効果を得ることができる。
【0013】
請求項8に記載した通信状態表示装置によれば、第1の車両に搭載されている第1の車載通信装置と第2の車両に搭載されている第2の車載通信装置とが行う車々間通信を制御する車々間通信制御システム内にあって第2の車両に搭載され、第2の車載通信装置の通信状態を表す表示情報を表示する。これにより、上記した車々間通信制御システム内の車載通信システムと共に用いられることにより、上記した請求項1に記載したものと同様の作用効果を得ることができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の一実施形態について、図面を参照して説明する。図1は、車々間通信制御システムの全体構成を機能ブロック図として示している。尚、本実施形態では、2台の車両が縦走しており、それら2台の車両のうち後続車両に車載通信システムが搭載されていると共に先行車両に通信状態表示装置が搭載されている場合を例にして説明する。
【0015】
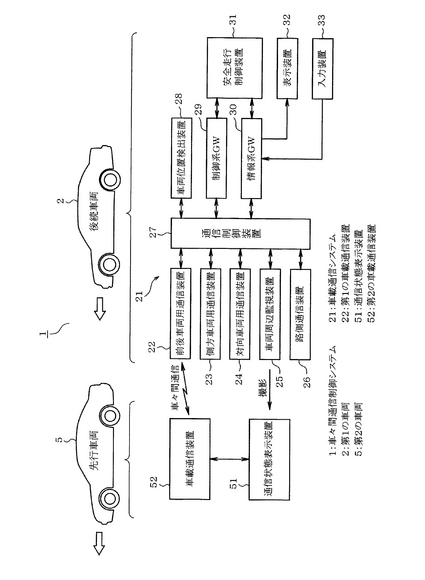
車々間通信制御システム1は、後続車両である車両2(本発明でいう第1の車両)に搭載されている車載通信システム21と、先行車両である車両5(本発明でいう第2の車両)に搭載されている通信状態表示装置51とを備えて構成されている。
【0016】
先行車両である車両5に搭載されている通信状態表示装置51は、車両5に搭載されている車載通信装置52(本発明でいう第2の車載通信装置)と接続されている。車載通信装置52は、車両に搭載されている車載通信装置との間で車々間通信を行ったり路側に設置されている路側機との間で路車間通信を行ったりするように構成されており、通信状態表示装置51は、その車載通信装置52の通信状態を表す表示情報を表示するように構成されている。
【0017】
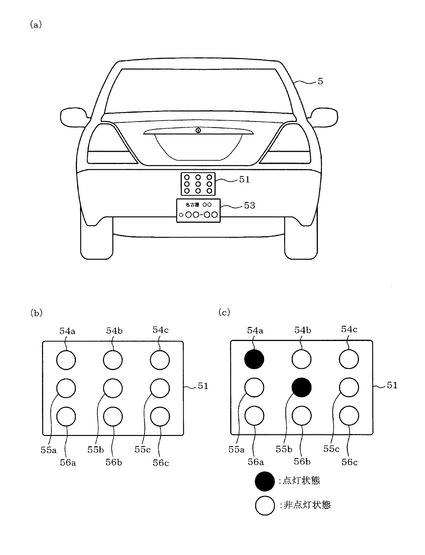
具体的に説明すると、通信状態表示装置51は、図2に示すように、例えば車両後部のナンバープレート53の上方に取付けられており、例えばミリ波の通信チャネルの各々に対応する3個のLED54a〜54c、マイクロ波の通信チャネルに対応する3個のLED55a〜55cおよびレーザの通信チャネルに対応する3個のLED56a〜56cが配列されて構成されている。尚、これらミリ波、マイクロ波およびレーザは、本発明でいう通信媒体である。また、通信状態表示装置51は、車両後部のナンバープレート53の上方に取付けられている構成に限らず、後続車両に搭載されている車載カメラが撮影可能な部位に取付けられている構成であれば良い。
【0018】
この場合、ミリ波の通信チャネルに対応する3個のLED54a〜54cは、それぞれ通信チャネル1〜通信チャネル3に対応するもので、車々間通信や路車間通信に使用されている通信チャネルに対応するLEDが点灯状態になると共に、車々間通信や路車間通信に使用されていない通信チャネル(空きチャネル)に対応するLEDが非点灯状態になるように構成されている。つまり、ミリ波の通信チャネルに対応する3個のLED54a〜54cについて説明すると、車載通信装置52が例えばミリ波の通信チャネル1を車々間通信や路車間通信に使用していると共に通信チャネル2,3を車々間通信や路車間通信に使用していない場合であれば、通信チャネル1に対応するLED54aが点灯状態になると共に通信チャネル2,3に対応するLED54b,54cが非点灯状態になるように構成されている。マイクロ波の通信チャネルに対応する3個のLED55a〜55cおよびレーザの通信チャネルに対応する3個のLED56a〜56cについても、これと同様である。
【0019】
一方、後続車両である車両2に搭載されている車載通信システム21は、前後車両用通信装置(本発明でいう第1の車載通信装置)22、側方車両用通信装置23、対向車両用通信装置24、車両周辺監視装置25、路側通信装置26、通信制御装置27、車両位置検出装置28、制御系ゲートウェイ(GW)29、情報系ゲートウェイ30、安全走行制御装置31、表示装置32および入力装置33を備えて構成されている。
【0020】
前後車両用通信装置22は、通信制御装置27からの車々間通信指示信号に基づいて自車両に対して前後に位置する車両に搭載されている車載通信装置との間で車々間通信を行う。側方車両用通信装置23は、通信制御装置27からの車々間通信指示信号に基づいて自車両に対して側方に位置する車両に搭載されている車載通信装置との間で車々間通信を行う。対向車両用通信装置24は、通信制御装置27からの車々間通信指示信号に基づいて自車両に対して対向する車両に搭載されている車載通信装置との間で車々間通信を行う。
【0021】
車両周辺監視装置25は、車載カメラを備えて構成されており、車載カメラにより車両周辺を撮影して監視する。この場合、車載カメラは、周知のステレオカメラによる測距機能を有している。また、車載カメラは、車両の全方向を撮影するように複数搭載されていても良いし、車両周辺の特定の一方向(例えば前後方向)のみを撮影するように1つのみ搭載されていても良いし、さらに、撮影視野が広角な魚眼レンズカメラや広角レンズカメラから構成されていても良い。路側通信装置26は、通信制御装置27からの路車間通信指示信号に基づいて路側に設置されている路側機や路側を歩行している歩行者が携帯している携帯情報端末との間で路車間通信(人車間通信)を行う。
【0022】
通信制御装置27は、車載通信システム21の動作全般を制御する。車両位置検出装置28は、例えばGPS受信機を備えて構成されており、GPS衛星から送信されたGPS電波を復調してパラメータを演算して後続車両である車両2の現在位置を検出する。制御系ゲートウェイ29は、通信制御装置27と安全走行制御装置31との間で車両の走行に関係するデータの送受信を制御する。情報系ゲートウェイ30は、通信制御装置27と安全走行制御装置31との間でユーザが扱うデータ(例えば現在位置データや目的地データなどの各種のアプリケーションに関係するデータ)の送受信を制御する。
【0023】
表示装置32は、例えば液晶ディスプレイから構成されており、通信制御装置27から情報系ゲートウェイ30を介して入力された制御信号に基づいて表示情報(例えば車載カメラにより撮影された撮影画像など)を表示する。入力装置33は、例えば上記した表示装置32に表示されるタッチパネルから構成されており、ユーザの操作を受付けて当該操作に対応する操作信号を情報系ゲートウェイ30を介して通信制御装置27へ出力する。尚、上記した構成において、車載通信システム21は、周知の構成を有するカーナビゲーションが車両2に搭載されている場合であれば、その機能の一部(例えば車両2の現在位置を検出する機能、表示情報を表示する機能およびユーザの操作を受付ける機能など)が当該カーナビゲーション装置の機能で代用されていても良い。
【0024】
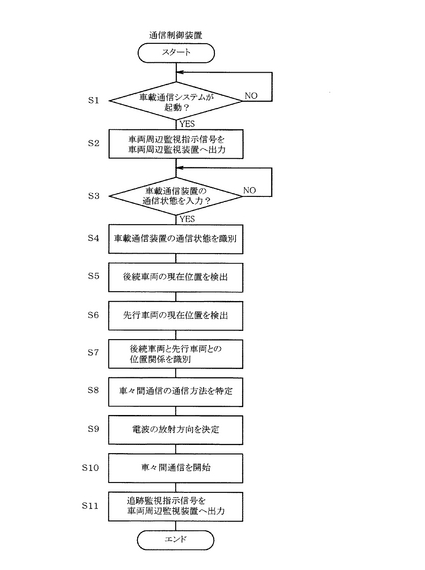
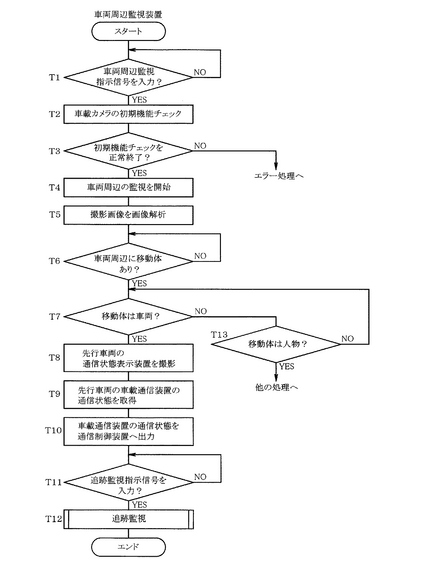
次に、上記した構成の作用について、図3ないし図8を参照して説明する。ここで、図3は、通信制御装置27が行う処理をフローチャートとして示しており、図4および図5は、車両周辺監視装置25が行う処理をフローチャートとして示している。また、ここでは、図1に示すように、後続車両である車両2に車載通信システム21が搭載されていると共に先行車両である車両5に通信状態表示装置51が搭載されており、後続車両である車両2に搭載されている前後車両用通信装置22と先行車両である車両5に搭載されている車載通信装置52とが車々間通信を行う場合を説明する。
【0025】
最初に、後続車両である車両2に搭載されている通信制御装置27は、車載通信システム21が起動されると(ステップS1にて「YES」)、車両周辺監視指示信号を車両周辺監視装置25へ出力し(ステップS2)、車両周辺監視装置25に車両周辺を監視させる。
【0026】
車両周辺監視装置25は、通信制御装置27から車両周辺監視指示信号が入力されると(ステップT1にて「YES」)、車載カメラの初期機能チェックとして予め設定されている機能チェック手順にしたがって撮影範囲の調整や焦点(フォーカス)の調整を行い(ステップT2)、初期機能チェックを正常に終了すると(ステップT3にて「YES」)、車載カメラによる車両周辺の監視を開始する(ステップT4)。
【0027】
次いで、車両周辺監視装置25は、車載カメラにより撮影された撮影画像を画像解析し(ステップT5)、車両周辺に移動体が存在するか否かを判定する(ステップT6)。尚、ここでいう移動体とは、車両や人物(歩行者)などである。そして、車両周辺監視装置25は、車両周辺に移動体が存在する旨を検出すると(ステップT6にて「YES」)、その検出された移動体の種別を例えばピクセルの集まりのサイズや形状を判断基準として(例えば閾値と比較して)判定する(ステップT7,T13)。
【0028】
さて、ここで、図1に示すように、後続車両である車両2に搭載されている車両周辺監視装置25が先行車両である車両5を移動体として判定した場合を説明する。車両周辺監視装置25は、ピクセルの集まりのサイズや形状が先行車両である車両5に該当し(類似し)、移動体として先行車両である車両5を検出すると(ステップT7にて「YES」)、撮影画像を画像解析して通信状態表示装置51の取付位置を検出し、車載カメラの撮影方向(焦点)を先行車両である車両5の車両後部のナンバープレート53の上方に取付けられている通信状態表示装置51に向けて通信状態表示装置51を撮影する(ステップT8)。そして、車両周辺監視装置25は、その撮影された撮影画像を画像解析して先行車両である車両5に搭載されている車載通信装置52の通信状態を取得する(ステップT9)。
【0029】
具体的に説明すると、車両周辺監視装置25は、通信状態表示装置51が、図2(c)に示すように、例えばミリ波の通信チャネルに対応する3個のLED54a〜54cのうちLED54aとマイクロ波の通信チャネルに対応する3個のLED55a〜55cのうちLED55bとが点灯状態にあると共に、これら以外のLED54b,54c,55a,55c、56a〜56cが非点灯状態にあると仮定すると、ミリ波の通信チャネル1とマイクロ波の通信チャネル2とが他の車々間通信や路車間通信に使用されていると共に、これら以外のミリ波の通信チャネル2,3とマイクロ波の通信チャネル1,3とレーザの通信チャネル1〜3とが他の車々間通信や路車間通信に使用されていない旨を取得する。そして、車両周辺監視装置25は、このようにして取得された車載通信装置52の通信状態を通信制御装置27へ出力する(ステップT10)。
【0030】
通信制御装置27は、車両周辺監視装置25から先行車両である車両5に搭載されている車載通信装置52の通信状態が入力されると(ステップS3にて「YES」)、その入力された通信状態に基づいて車載通信装置52の通信状態を識別する(ステップS4)。具体的に説明すると、通信制御装置27は、本実施形態では、ミリ波の通信チャネル1とマイクロ波の通信チャネル2とが他の車々間通信や路車間通信に使用されていると共に、これら以外のミリ波の通信チャネル2,3とマイクロ波の通信チャネル1,3とレーザの通信チャネル1〜3とが他の車々間通信や路車間通信に使用されていない旨を識別する。
【0031】
次いで、通信制御装置27は、車両位置検出装置28から車両2の現在位置が入力されると、後続車両である車両(自車両)2の現在位置を検出し(ステップS5)、車両周辺監視装置25から撮影画像が入力されると、その入力された撮影画像を画像解析して先行車両である車両5の現在位置を検出する(ステップS6)。そして、通信制御装置27は、後続車両である車両2の現在位置と先行車両である車両5の現在位置とを識別し、後続車両である車両2と先行車両である車両5との位置関係を識別する(ステップS7)。尚、この場合、撮影画像を画像解析して先行車両である車両5の現在位置を検出することが困難な場合は、電波を先行車両である車両5へ向けて放射して反射波の受信状態を判定して先行車両である車両5の現在位置を検出しても良い。
【0032】
次いで、通信制御装置27は、このようにして識別された先行車両である車両5に搭載されている車載通信装置52の通信状態および後続車両である車両2と先行車両である車両5との位置関係に基づいて他の路車間通信や車々間通信に影響を及ぼさない前後車両用通信装置22と車載通信装置52とが行い得る車々間通信の通信方法を特定する(ステップS8)。
【0033】
具体的に説明すると、通信制御装置27は、前後車両用通信装置22と先行車両である車両5に搭載されている車載通信装置52とが行う車々間通信の通信方法として、上記したようにミリ波の通信チャネル1とマイクロ波の通信チャネル2とが他の車々間通信や路車間通信に使用されていると共にこれら以外のミリ波の通信チャネル2,3とマイクロ波の通信チャネル1,3とレーザの通信チャネル1〜3とが他の車々間通信や路車間通信に使用されていないことから、例えばミリ波の通信チャネル2を特定する。尚、この場合、後続車両である車両2と先行車両である車両5との位置関係、つまり、後続車両である車両2と先行車両である車両5との距離の大小(長短)に応じて適切な通信媒体を選択すれば良い。また、例えば気象情報を取得する機能を併用することにより、その時点での気象条件に応じて例えば霧が発生している場合であれば長波長の通信媒体を選択するなどしても良い。
【0034】
そして、通信制御装置27は、前後車両用通信装置22から放射される電波が車載通信装置52に捕捉されるように電波の放射方向を決定し(ステップS9)、車々間通信指示信号を前後車両用通信装置22へ出力し、その決定された放射方向へ前後車両用通信装置22からの電波の放射を開始させ、その特定された通信方法にしたがって前後車両通信装置22と車載通信装置52との間の車々間通信を開始させる(ステップS10)。
【0035】
以上に説明した一連の処理により、後続車両である車両2に搭載されている車載通信システム1では、先行車両である車両5に搭載されている通信状態表示装置51を撮影し、
車載通信装置52の通信状態および後続車両である車両2と先行車両である車両5との位置関係に基づいて他の路車間通信や車々間通信に影響を及ぼさない前後車両用通信装置22と車載通信装置52とが行い得る車々間通信の通信方法を特定し、その特定された通信方法にしたがって前後車両通信装置22と車載通信装置52とが車々間通信を開始するように制御する。尚、車両周辺監視装置25は、上記した一連の処理において、初期機能チェックを正常に終了しなかった場合には(ステップT3にて「NO」)、エラー処理を行い、移動体として人物を検出した場合には(ステップT13にて「YES」)、他の処理を行う。
【0036】
さて、通信制御装置27は、このようにして前後車両通信装置22と車載通信装置52との間の車々間通信を開始させた以後では、追跡監視指示信号を車両周辺監視装置25へ出力し(ステップS11)、車々間通信を継続させるために車両周辺監視装置25による先行車両である車両5の追跡監視を行う。
【0037】
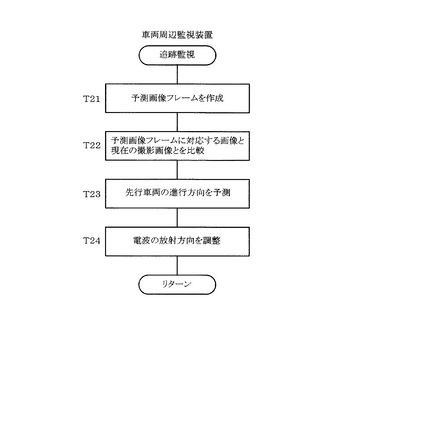
車両周辺監視装置25は、通信制御装置27から追跡監視指示信号が入力されると(ステップT11にて「YES」)、これ以降、前後車両用通信装置22から放射される電波の車載通信装置52への捕捉が継続されるように車載通信装置51の追跡監視処理を行う(ステップT12)。これ以降、車両周辺監視装置25が行う追跡監視処理について、図5を参照して説明する。
【0038】
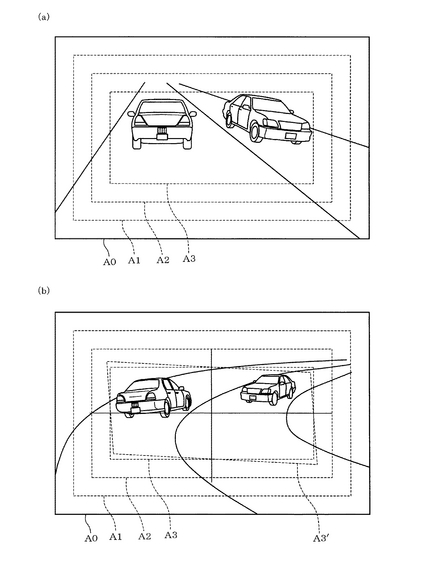
車両周辺監視装置25は、追跡監視処理へ移行すると、撮影画像を画像解析して所定時間経過後の撮影画像に対応する予測画像フレームを作成する(ステップT21)。ここで、予測画像フレームとは、車載カメラが所定時間経過後に撮影すると予測される撮影画像に対応するフレームである。具体的に説明すると、図6に示すように、「A0」にて示す撮影画像の全領域に対して、フレーム「A1」にて示す領域が時間「t1」経過後の予測画像フレームであり、フレーム「A2」にて示す領域が時間「t2」経過後の予測画像フレームであり、フレーム「A3」にて示す領域が時間「t3」経過後の予測画像フレームである。
【0039】
次いで、車両周辺監視装置25は、所定時間が経過すると、このようにして作成された予測画像フレームに対応する画像と現在の撮影画像(実際の撮影画像)とを比較し(ステップT22)、その差分を計算して先行車両である車両5の進行方向を予測する(ステップT23)。具体的に説明すると、車両周辺監視装置25は、時間「t1」が経過すると、予測画像フレーム「A1」に対応する画像と時間「t1」が経過した時点での撮影画像とを比較し、その差分を計算して先行車両である車両5の進行方向を予測する。そして、車両周辺監視装置25は、その予測された進行方向に基づいて前後車両用通信装置22からの電波の放射方向を調整する(ステップT24)。
【0040】
尚、この場合、車両周辺監視装置25は、図6(a)に示すように、撮影画像を画像解析して道路形状を識別し、先行車両である車両5および後続車両である車両2が直線道路を走行している旨を検出すると、フレームの形状を変形することなく(矩形のフレームを維持したまま)予測画像フレームを順次作成することになるが、一方、図6(b)に示すように、先行車両である車両5および後続車両である車両2がカーブ道路を走行している旨を検出すると、フレームの形状をカーブの曲率に応じて変形させて予測画像フレームを順次作成することになる(「A3´」参照)。また、道路形状は、カーナビゲーション装置で利用される道路地図データから読出されても良い。
【0041】
以上に説明した一連の処理により、後続車両である車両2に搭載されている車載通信システム1では、前後車両用通信装置22からの電波の放射を開始させた以後は、撮影画像から予測画像フレームを作成し、予測画像フレームに対応する画像と実際の撮影画像とを比較して先行車両である車両5の進行方向を予測し、その予測された進行方向に基づいて前後車両用通信装置22からの電波の放射方向を調整する。
【0042】
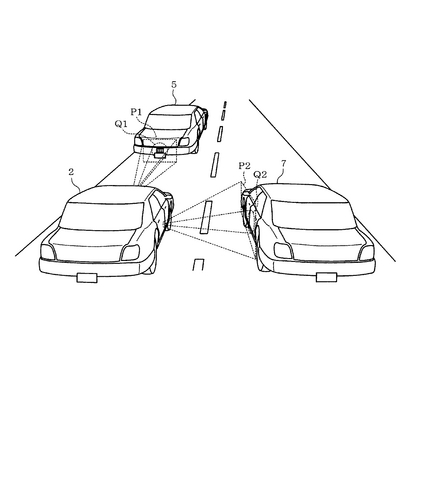
ところで、以上は、図7に示すように、車両5と車両2とが縦走している場合に、後続車両である車両2に搭載されている車載通信システム21が先行車両である車両5に搭載されている通信状態表示装置51を撮影し、後続車両である車両2に搭載されている前後車両用通信装置22と先行車両である車両5に搭載されている車載通信装置52とが他の車々間通信や路車間通信に影響を及ぼさない車々間通信を行う場合を説明したものであるが、車両2と車両7とが並走している場合にも、側方車両用通信装置23を用いて同様の制御を行うことにより、他の車々間通信や路車間通信に影響を及ぼさない車々間通信を行うことが可能である。また、図示しないが、対向する2台の車両同士の間でも、対向車両用通信装置24を用いて同様の制御を行うことにより、他の車々間通信や路車間通信に影響を及ぼさない車々間通信を行うことが可能である。
【0043】
尚、図7では、車両2からの先行車両である車両5に対する車載カメラの撮影視野を破線「P1」にて示す領域として示しており、車両2からの先行車両である車両5に対する前後車両用通信装置22の通信範囲(電波の放射範囲)を破線「Q1」にて示す領域として示している。また、車両2からの並走車両である車両7に対する車載カメラの撮影視野を破線「P2」にて示す領域として示しており、車両2からの並走車両である車両7に対する側方車両用通信装置23の通信範囲を破線「Q2」にて示す領域として示している。このように車載カメラの撮影視野が広く且つ車両用通信装置22,23の通信範囲が狭いことから、通信状態表示装置51を追跡し、撮影画像を画像解析することにより、電波の放射方向を調整することが可能となるものである。
【0044】
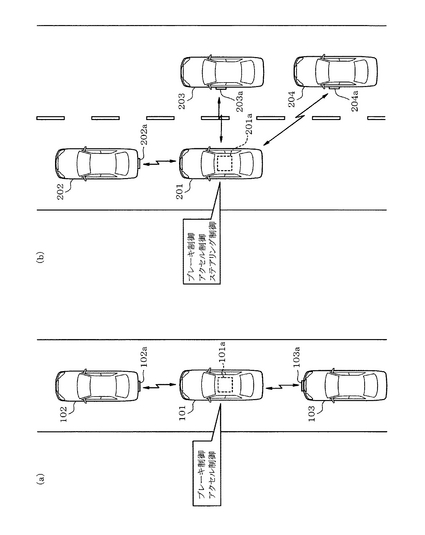
また、以上は、車々間通信を1対1で行う場合を説明したものであるが、車々間通信を1対n(nは2以上の正数)で行うことも可能である。すなわち、図8(a)に示すように、3台の車両101〜103が縦走している場合であれば、真中の車両101に搭載されている車載通信システム101aにおいて、車両周辺監視装置が先行車両102の車両後部に搭載されている通信状態表示装置102aを撮影すると共に後続車両103の車両前部に搭載されている通信状態表示装置103aを撮影し、先行車両102に搭載されている車載通信装置の通信状態や後続車両103に搭載されている車載通信装置の通信状態を識別し、それら車載通信装置が行っている他の車々間通信や路車間通信に影響を及ぼさない通信方法を選択することにより、先行車両102との間の車々間通信や後続車両103との間の車々間通信を他の車々間通信や路車間通信と衝突したり干渉したりすることなく同時に行うことが可能である。そして、このように先行車両102や後続車両103との間で車々間通信を行い、先行車両102や後続車両103の走行情報(ブレーキ動作やアクセル動作などに関する情報)状態を取得することにより、安全走行制御装置30によりブレーキ制御やアクセル制御などを適切に行うことができ、適切な運転支援を実現することができる。
【0045】
さらに、図8(b)に示すように、4台の車両が縦走していたり並走していたりする場合でも、例えば車両201に搭載されている車載通信システム201aにおいて、車両周辺監視装置が先行車両202の車両後部に搭載されている通信状態表示装置202aを撮影すると共に並走車両203,204の車両側部に搭載されている通信状態表示装置203a,204aを撮影し、上記した制御と同様の制御を行うことにより、先行車両202との間の車々間通信や並走車両203,204との間の車々間通信を他の車々間通信や路車間通信と衝突したり干渉したりすることなく同時に行うことが可能である。そして、この場合は、このように先行車両202や並走車両203,204との間で車々間通信を行い、先行車両202や並走車両203,204の走行情報(ブレーキ動作やアクセル動作やステアリング動作などに関する情報)状態を取得することにより、安全走行制御装置30によりブレーキ制御やアクセル制御やステアリング制御などを適切に行うことができ、適切な運転支援を実現することができる。
【0046】
以上に説明したように本実施形態によれば、車々間通信制御システム1において、先行車両である車両5に搭載されている通信状態表示装置51は、車載通信装置52の通信状態を表示し、後続車両である車両2に搭載されている車載通信システム21は、通信状態表示装置52を撮影して撮影画像を画像解析して車載通信装置51の通信状態を識別すると共に、後続車両である車両2と先行車両である車両5との位置関係を識別し、それら識別された車載通信装置52の通信状態および後続車両である車両2と先行車両である車両5との位置関係に基づいて他の車々間通信や路車間通信に影響を及ぼさない前後車両用通信装置22と車載通信装置52とが行い得る車々間通信の通信方法を特定し、その特定された通信方法にしたがって前後車両用通信装置22と車載通信装置52とが車々間通信を行うように制御する。これにより、従来のものとは異なって、複雑な制御を必要とすることなく、後続車両である車両2に搭載されている前後車両用通信装置22と先行車両である車両5に搭載されている車載通信装置52とが車々間通信を他の車々間通信や路車間通信と衝突したり干渉したりすることなく適切に行うことができる。
【0047】
本発明は、上記した実施形態にのみ限定されるものではなく、以下のように変形または拡張することができる。
前後車両用通信装置と側方車両用通信装置と対向車両用通信装置とが別々に搭載されている構成に限らず、これらと同等の機能を有する(兼用する)1つの車両用通信装置が搭載されている構成であっても良い。
【0048】
先行車両に搭載されている通信状態表示装置は、車載通信装置の通信状態を文字情報として表示する構成であっても良く、後続車両に搭載されている車載通信システムは、文字認識機能を有することにより、通信状態表示装置に表示されている文字情報を識別し、車載通信装置の通信状態を識別する構成であっても良い。
【0049】
通信媒体として超音波を用いる構成であっても良い。また、通信媒体を選択する場合に、車々間通信を近距離で行う(所定距離未満で行う)場合には超音波を選択し、一方、車々間通信を遠距離で行う(所定距離以上で行う)場合には電波を選択する構成であっても良い。また、車々間通信で要求される指向性のレベルに応じて通信媒体を選択する構成であっても良い。さらに、通信方式として、FDMA、TDMAおよびスペクトラム拡散のうちいずれかを選択可能な構成であっても良い。
【図面の簡単な説明】
【0050】
【図1】本発明の一実施形態の全体構成を示す機能ブロック図
【図2】通信状態表示装置が車両後部に取付けられている態様を示す図
【図3】通信制御装置が行う処理を示すフローチャート
【図4】車両周辺監視装置が行う処理を示すフローチャート
【図5】図4相当図
【図6】予測画像フレームを概略的に示す図
【図7】先行車両や並走車両と車々間通信を行う態様を概略的に示す図
【図8】先行車両や並走車両と車々間通信を行って走行制御を行う態様を概略的に示す図
【符号の説明】
【0051】
図面中、1は車々間通信制御システム、2は車両(第1の車両)、5は車両(第2の車両)、21は車載通信システム、22は前後車両用通信装置(第1の車載通信装置)、51は通信状態表示装置、52は車載通信装置(第2の車載通信装置)である。
【技術分野】
【0001】
本発明は、第1の車両に搭載されている第1の車載通信装置と第2の車両に搭載されている第2の車載通信装置とが行う車々間通信を制御する車々間通信制御システム、前記車々間通信制御システム内で用いられる車載通信システムおよび通信状態表示装置に関する。
【背景技術】
【0002】
従来より、第1の車両に搭載されている第1の車載通信装置と第2の車両に搭載されている第2の車載通信装置とが車々間通信を行う車々間通信システムが供されている(例えば特許文献1参照)。
【特許文献1】特開2002−74577号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、この種の車々間通信システムでは、第1の車載通信装置と第2の車載通信装置とが行う車々間通信が例えば他の車両に搭載されている他の車載通信装置との間で行う他の車々間通信や路側に設置されている路側機との間で行う路車間通信と衝突したり干渉したりすることを未然に回避するために他の車々間通信や路車間通信を監視して通信媒体や通信チャネルを選択する必要がある。しかしながら、他の車々間通信や路車間通信を監視するには、複雑な制御を必要とするという問題がある。
【0004】
本発明は、上記した事情に鑑みてなされたものであり、その目的は、複雑な制御を必要とすることなく、第1の車載通信装置と第2の車載通信装置とが車々間通信を他の車々間通信や路車間通信と衝突したり干渉したりすることなく適切に行うことができる車々間通信制御システム、車載通信システムおよび通信状態表示装置を提供することにある。
【課題を解決するための手段】
【0005】
請求項1に記載した車々間通信制御システムによれば、第2の車両に搭載されている通信状態表示装置は、第2の車載通信装置の通信状態を表す表示情報を表示する。一方、第1の車両に搭載されている車載通信システムは、通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して第2の車載通信装置の通信状態を識別すると共に、第1の車両と第2の車両との位置関係を識別し、それら識別された第2の車載通信装置の通信状態および第1の車両と第2の車両との位置関係に基づいて他の車々間通信や路車間通信に影響を及ぼさない第1の車載通信装置と第2の車載通信装置とが行い得る車々間通信の通信方法を特定し、その特定された通信方法にしたがって第1の車載通信装置と第2の車載通信装置とが車々間通信を行うように制御する。
【0006】
これにより、第2の車両に搭載されている通信状態表示装置では、第2の車載通信装置の通信状態を表す表示情報を表示し、一方、第1の車両に搭載されている車載通信システムでは、第2の車両に搭載されている通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析することにより、他の車々間通信や路車間通信に影響を及ぼさない第1の車載通信装置と第2の車載通信装置とが行い得る車々間通信の通信方法を特定することができるので、従来のものとは異なって、複雑な制御を必要とすることなく、第1の車載通信装置と第2の車載通信装置とが車々間通信を他の車々間通信や路車間通信と衝突したり干渉したりすることなく適切に行うことができる。
【0007】
請求項2に記載した車々間通信制御システムによれば、通信状態表示装置は、第2の車載通信装置の通信媒体の使用状態を表す表示情報を表示し、一方、車載通信システムは、通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して第2の車載通信装置の通信媒体の使用状態を識別する。これにより、他の車々間通信や路車間通信に影響を及ぼさない第1の車載通信装置と第2の車載通信装置とが行い得る車々間通信の通信媒体(ミリ波、マイクロ波およびレーザなど)を適切に特定することができ、その特定された通信媒体にしたがって第1の車載通信装置と第2の車載通信装置とが車々間通信を適切に行うことができる。
【0008】
請求項3に記載した車々間通信制御システムによれば、通信状態表示装置は、第2の車載通信装置の通信チャネルの使用状態を表す表示情報を表示し、一方、車載通信システムは、通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して第2の車載通信装置の通信チャネルの使用状態を識別する。これにより、他の車々間通信や路車間通信に影響を及ぼさない第1の車載通信装置と第2の車載通信装置とが行い得る車々間通信の通信チャネルを適切に特定することができ、その特定された通信チャネルにしたがって第1の車載通信装置と第2の車載通信装置とが車々間通信を適切に行うことができる。
【0009】
請求項4に記載した車々間通信制御システムによれば、車載通信システムは、撮影画像を画像解析して第2の車両の現在位置を検出し、第1の車両と第2の車両との位置関係を識別する。これにより、第2の車両の現在位置を検出するための専用の装置を必要とすることなく第2の車両の現在位置を検出することができる。
【0010】
請求項5に記載した車々間通信制御システムによれば、車載通信システムは、第1の車両と第2の車両との位置関係に基づいて第1の車載通信装置から放射される電波が第2の車載通信装置に捕捉されるように電波の放射方向を決定し、その決定された放射方向へ第1の車載通信装置からの電波の放射を開始させ、第1の車載通信装置と第2の車載通信装置とが車々間通信を開始するように制御する。これにより、第1の車載通信装置から第2の車載通信装置へ向けての電波の放射を適切に開始することができ、第1の車載通信装置と第2の車載通信装置とが車々間通信を適切に開始することができる。
【0011】
請求項6に記載した車々間通信制御システムによれば、車載通信システムは、第1の車載通信装置からの電波の放射を開始させた以後では、撮影画像から所定時間経過後の撮影画像に対応する予測画像フレームを作成し、過去の撮影画像から作成された予測画像フレームに対応する画像と現在の撮影画像とを比較して第2の車両の進行方向を予測し、その予測された進行方向に基づいて第1の車載通信装置からの電波の放射方向を調整する。これにより、第1の車載通信装置から第2の車載通信装置へ向けて電波の放射を開始した以後も、第1の車載通信装置から第2の車載通信装置へ向けての電波の放射を適切に継続することができ、第1の車載通信装置と第2の車載通信装置とが車々間通信を中断することなく適切に継続して行うことができる。
【0012】
請求項7に記載した車載通信システムによれば、第1の車両に搭載されている第1の車載通信装置と第2の車両に搭載されている第2の車載通信装置とが行う車々間通信を制御する車々間通信制御システム内にあって第1の車両に搭載され、第2の車両に搭載されている通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して第2の車載通信装置の通信状態を識別すると共に、第1の車両と第2の車両との位置関係を識別し、それら識別された第2の車載通信装置の通信状態および第1の車両と第2の車両との位置関係に基づいて他の車々間通信や路車間通信に影響を及ぼさない第1の車載通信装置と第2の車載通信装置とが行い得る車々間通信の通信方法を特定し、その特定された通信方法にしたがって第1の車載通信装置と第2の車載通信装置とが車々間通信を行うように制御する。これにより、上記した車々間通信制御システム内の通信状態表示装置と共に用いられることにより、上記した請求項1に記載したものと同様の作用効果を得ることができる。
【0013】
請求項8に記載した通信状態表示装置によれば、第1の車両に搭載されている第1の車載通信装置と第2の車両に搭載されている第2の車載通信装置とが行う車々間通信を制御する車々間通信制御システム内にあって第2の車両に搭載され、第2の車載通信装置の通信状態を表す表示情報を表示する。これにより、上記した車々間通信制御システム内の車載通信システムと共に用いられることにより、上記した請求項1に記載したものと同様の作用効果を得ることができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の一実施形態について、図面を参照して説明する。図1は、車々間通信制御システムの全体構成を機能ブロック図として示している。尚、本実施形態では、2台の車両が縦走しており、それら2台の車両のうち後続車両に車載通信システムが搭載されていると共に先行車両に通信状態表示装置が搭載されている場合を例にして説明する。
【0015】
車々間通信制御システム1は、後続車両である車両2(本発明でいう第1の車両)に搭載されている車載通信システム21と、先行車両である車両5(本発明でいう第2の車両)に搭載されている通信状態表示装置51とを備えて構成されている。
【0016】
先行車両である車両5に搭載されている通信状態表示装置51は、車両5に搭載されている車載通信装置52(本発明でいう第2の車載通信装置)と接続されている。車載通信装置52は、車両に搭載されている車載通信装置との間で車々間通信を行ったり路側に設置されている路側機との間で路車間通信を行ったりするように構成されており、通信状態表示装置51は、その車載通信装置52の通信状態を表す表示情報を表示するように構成されている。
【0017】
具体的に説明すると、通信状態表示装置51は、図2に示すように、例えば車両後部のナンバープレート53の上方に取付けられており、例えばミリ波の通信チャネルの各々に対応する3個のLED54a〜54c、マイクロ波の通信チャネルに対応する3個のLED55a〜55cおよびレーザの通信チャネルに対応する3個のLED56a〜56cが配列されて構成されている。尚、これらミリ波、マイクロ波およびレーザは、本発明でいう通信媒体である。また、通信状態表示装置51は、車両後部のナンバープレート53の上方に取付けられている構成に限らず、後続車両に搭載されている車載カメラが撮影可能な部位に取付けられている構成であれば良い。
【0018】
この場合、ミリ波の通信チャネルに対応する3個のLED54a〜54cは、それぞれ通信チャネル1〜通信チャネル3に対応するもので、車々間通信や路車間通信に使用されている通信チャネルに対応するLEDが点灯状態になると共に、車々間通信や路車間通信に使用されていない通信チャネル(空きチャネル)に対応するLEDが非点灯状態になるように構成されている。つまり、ミリ波の通信チャネルに対応する3個のLED54a〜54cについて説明すると、車載通信装置52が例えばミリ波の通信チャネル1を車々間通信や路車間通信に使用していると共に通信チャネル2,3を車々間通信や路車間通信に使用していない場合であれば、通信チャネル1に対応するLED54aが点灯状態になると共に通信チャネル2,3に対応するLED54b,54cが非点灯状態になるように構成されている。マイクロ波の通信チャネルに対応する3個のLED55a〜55cおよびレーザの通信チャネルに対応する3個のLED56a〜56cについても、これと同様である。
【0019】
一方、後続車両である車両2に搭載されている車載通信システム21は、前後車両用通信装置(本発明でいう第1の車載通信装置)22、側方車両用通信装置23、対向車両用通信装置24、車両周辺監視装置25、路側通信装置26、通信制御装置27、車両位置検出装置28、制御系ゲートウェイ(GW)29、情報系ゲートウェイ30、安全走行制御装置31、表示装置32および入力装置33を備えて構成されている。
【0020】
前後車両用通信装置22は、通信制御装置27からの車々間通信指示信号に基づいて自車両に対して前後に位置する車両に搭載されている車載通信装置との間で車々間通信を行う。側方車両用通信装置23は、通信制御装置27からの車々間通信指示信号に基づいて自車両に対して側方に位置する車両に搭載されている車載通信装置との間で車々間通信を行う。対向車両用通信装置24は、通信制御装置27からの車々間通信指示信号に基づいて自車両に対して対向する車両に搭載されている車載通信装置との間で車々間通信を行う。
【0021】
車両周辺監視装置25は、車載カメラを備えて構成されており、車載カメラにより車両周辺を撮影して監視する。この場合、車載カメラは、周知のステレオカメラによる測距機能を有している。また、車載カメラは、車両の全方向を撮影するように複数搭載されていても良いし、車両周辺の特定の一方向(例えば前後方向)のみを撮影するように1つのみ搭載されていても良いし、さらに、撮影視野が広角な魚眼レンズカメラや広角レンズカメラから構成されていても良い。路側通信装置26は、通信制御装置27からの路車間通信指示信号に基づいて路側に設置されている路側機や路側を歩行している歩行者が携帯している携帯情報端末との間で路車間通信(人車間通信)を行う。
【0022】
通信制御装置27は、車載通信システム21の動作全般を制御する。車両位置検出装置28は、例えばGPS受信機を備えて構成されており、GPS衛星から送信されたGPS電波を復調してパラメータを演算して後続車両である車両2の現在位置を検出する。制御系ゲートウェイ29は、通信制御装置27と安全走行制御装置31との間で車両の走行に関係するデータの送受信を制御する。情報系ゲートウェイ30は、通信制御装置27と安全走行制御装置31との間でユーザが扱うデータ(例えば現在位置データや目的地データなどの各種のアプリケーションに関係するデータ)の送受信を制御する。
【0023】
表示装置32は、例えば液晶ディスプレイから構成されており、通信制御装置27から情報系ゲートウェイ30を介して入力された制御信号に基づいて表示情報(例えば車載カメラにより撮影された撮影画像など)を表示する。入力装置33は、例えば上記した表示装置32に表示されるタッチパネルから構成されており、ユーザの操作を受付けて当該操作に対応する操作信号を情報系ゲートウェイ30を介して通信制御装置27へ出力する。尚、上記した構成において、車載通信システム21は、周知の構成を有するカーナビゲーションが車両2に搭載されている場合であれば、その機能の一部(例えば車両2の現在位置を検出する機能、表示情報を表示する機能およびユーザの操作を受付ける機能など)が当該カーナビゲーション装置の機能で代用されていても良い。
【0024】
次に、上記した構成の作用について、図3ないし図8を参照して説明する。ここで、図3は、通信制御装置27が行う処理をフローチャートとして示しており、図4および図5は、車両周辺監視装置25が行う処理をフローチャートとして示している。また、ここでは、図1に示すように、後続車両である車両2に車載通信システム21が搭載されていると共に先行車両である車両5に通信状態表示装置51が搭載されており、後続車両である車両2に搭載されている前後車両用通信装置22と先行車両である車両5に搭載されている車載通信装置52とが車々間通信を行う場合を説明する。
【0025】
最初に、後続車両である車両2に搭載されている通信制御装置27は、車載通信システム21が起動されると(ステップS1にて「YES」)、車両周辺監視指示信号を車両周辺監視装置25へ出力し(ステップS2)、車両周辺監視装置25に車両周辺を監視させる。
【0026】
車両周辺監視装置25は、通信制御装置27から車両周辺監視指示信号が入力されると(ステップT1にて「YES」)、車載カメラの初期機能チェックとして予め設定されている機能チェック手順にしたがって撮影範囲の調整や焦点(フォーカス)の調整を行い(ステップT2)、初期機能チェックを正常に終了すると(ステップT3にて「YES」)、車載カメラによる車両周辺の監視を開始する(ステップT4)。
【0027】
次いで、車両周辺監視装置25は、車載カメラにより撮影された撮影画像を画像解析し(ステップT5)、車両周辺に移動体が存在するか否かを判定する(ステップT6)。尚、ここでいう移動体とは、車両や人物(歩行者)などである。そして、車両周辺監視装置25は、車両周辺に移動体が存在する旨を検出すると(ステップT6にて「YES」)、その検出された移動体の種別を例えばピクセルの集まりのサイズや形状を判断基準として(例えば閾値と比較して)判定する(ステップT7,T13)。
【0028】
さて、ここで、図1に示すように、後続車両である車両2に搭載されている車両周辺監視装置25が先行車両である車両5を移動体として判定した場合を説明する。車両周辺監視装置25は、ピクセルの集まりのサイズや形状が先行車両である車両5に該当し(類似し)、移動体として先行車両である車両5を検出すると(ステップT7にて「YES」)、撮影画像を画像解析して通信状態表示装置51の取付位置を検出し、車載カメラの撮影方向(焦点)を先行車両である車両5の車両後部のナンバープレート53の上方に取付けられている通信状態表示装置51に向けて通信状態表示装置51を撮影する(ステップT8)。そして、車両周辺監視装置25は、その撮影された撮影画像を画像解析して先行車両である車両5に搭載されている車載通信装置52の通信状態を取得する(ステップT9)。
【0029】
具体的に説明すると、車両周辺監視装置25は、通信状態表示装置51が、図2(c)に示すように、例えばミリ波の通信チャネルに対応する3個のLED54a〜54cのうちLED54aとマイクロ波の通信チャネルに対応する3個のLED55a〜55cのうちLED55bとが点灯状態にあると共に、これら以外のLED54b,54c,55a,55c、56a〜56cが非点灯状態にあると仮定すると、ミリ波の通信チャネル1とマイクロ波の通信チャネル2とが他の車々間通信や路車間通信に使用されていると共に、これら以外のミリ波の通信チャネル2,3とマイクロ波の通信チャネル1,3とレーザの通信チャネル1〜3とが他の車々間通信や路車間通信に使用されていない旨を取得する。そして、車両周辺監視装置25は、このようにして取得された車載通信装置52の通信状態を通信制御装置27へ出力する(ステップT10)。
【0030】
通信制御装置27は、車両周辺監視装置25から先行車両である車両5に搭載されている車載通信装置52の通信状態が入力されると(ステップS3にて「YES」)、その入力された通信状態に基づいて車載通信装置52の通信状態を識別する(ステップS4)。具体的に説明すると、通信制御装置27は、本実施形態では、ミリ波の通信チャネル1とマイクロ波の通信チャネル2とが他の車々間通信や路車間通信に使用されていると共に、これら以外のミリ波の通信チャネル2,3とマイクロ波の通信チャネル1,3とレーザの通信チャネル1〜3とが他の車々間通信や路車間通信に使用されていない旨を識別する。
【0031】
次いで、通信制御装置27は、車両位置検出装置28から車両2の現在位置が入力されると、後続車両である車両(自車両)2の現在位置を検出し(ステップS5)、車両周辺監視装置25から撮影画像が入力されると、その入力された撮影画像を画像解析して先行車両である車両5の現在位置を検出する(ステップS6)。そして、通信制御装置27は、後続車両である車両2の現在位置と先行車両である車両5の現在位置とを識別し、後続車両である車両2と先行車両である車両5との位置関係を識別する(ステップS7)。尚、この場合、撮影画像を画像解析して先行車両である車両5の現在位置を検出することが困難な場合は、電波を先行車両である車両5へ向けて放射して反射波の受信状態を判定して先行車両である車両5の現在位置を検出しても良い。
【0032】
次いで、通信制御装置27は、このようにして識別された先行車両である車両5に搭載されている車載通信装置52の通信状態および後続車両である車両2と先行車両である車両5との位置関係に基づいて他の路車間通信や車々間通信に影響を及ぼさない前後車両用通信装置22と車載通信装置52とが行い得る車々間通信の通信方法を特定する(ステップS8)。
【0033】
具体的に説明すると、通信制御装置27は、前後車両用通信装置22と先行車両である車両5に搭載されている車載通信装置52とが行う車々間通信の通信方法として、上記したようにミリ波の通信チャネル1とマイクロ波の通信チャネル2とが他の車々間通信や路車間通信に使用されていると共にこれら以外のミリ波の通信チャネル2,3とマイクロ波の通信チャネル1,3とレーザの通信チャネル1〜3とが他の車々間通信や路車間通信に使用されていないことから、例えばミリ波の通信チャネル2を特定する。尚、この場合、後続車両である車両2と先行車両である車両5との位置関係、つまり、後続車両である車両2と先行車両である車両5との距離の大小(長短)に応じて適切な通信媒体を選択すれば良い。また、例えば気象情報を取得する機能を併用することにより、その時点での気象条件に応じて例えば霧が発生している場合であれば長波長の通信媒体を選択するなどしても良い。
【0034】
そして、通信制御装置27は、前後車両用通信装置22から放射される電波が車載通信装置52に捕捉されるように電波の放射方向を決定し(ステップS9)、車々間通信指示信号を前後車両用通信装置22へ出力し、その決定された放射方向へ前後車両用通信装置22からの電波の放射を開始させ、その特定された通信方法にしたがって前後車両通信装置22と車載通信装置52との間の車々間通信を開始させる(ステップS10)。
【0035】
以上に説明した一連の処理により、後続車両である車両2に搭載されている車載通信システム1では、先行車両である車両5に搭載されている通信状態表示装置51を撮影し、
車載通信装置52の通信状態および後続車両である車両2と先行車両である車両5との位置関係に基づいて他の路車間通信や車々間通信に影響を及ぼさない前後車両用通信装置22と車載通信装置52とが行い得る車々間通信の通信方法を特定し、その特定された通信方法にしたがって前後車両通信装置22と車載通信装置52とが車々間通信を開始するように制御する。尚、車両周辺監視装置25は、上記した一連の処理において、初期機能チェックを正常に終了しなかった場合には(ステップT3にて「NO」)、エラー処理を行い、移動体として人物を検出した場合には(ステップT13にて「YES」)、他の処理を行う。
【0036】
さて、通信制御装置27は、このようにして前後車両通信装置22と車載通信装置52との間の車々間通信を開始させた以後では、追跡監視指示信号を車両周辺監視装置25へ出力し(ステップS11)、車々間通信を継続させるために車両周辺監視装置25による先行車両である車両5の追跡監視を行う。
【0037】
車両周辺監視装置25は、通信制御装置27から追跡監視指示信号が入力されると(ステップT11にて「YES」)、これ以降、前後車両用通信装置22から放射される電波の車載通信装置52への捕捉が継続されるように車載通信装置51の追跡監視処理を行う(ステップT12)。これ以降、車両周辺監視装置25が行う追跡監視処理について、図5を参照して説明する。
【0038】
車両周辺監視装置25は、追跡監視処理へ移行すると、撮影画像を画像解析して所定時間経過後の撮影画像に対応する予測画像フレームを作成する(ステップT21)。ここで、予測画像フレームとは、車載カメラが所定時間経過後に撮影すると予測される撮影画像に対応するフレームである。具体的に説明すると、図6に示すように、「A0」にて示す撮影画像の全領域に対して、フレーム「A1」にて示す領域が時間「t1」経過後の予測画像フレームであり、フレーム「A2」にて示す領域が時間「t2」経過後の予測画像フレームであり、フレーム「A3」にて示す領域が時間「t3」経過後の予測画像フレームである。
【0039】
次いで、車両周辺監視装置25は、所定時間が経過すると、このようにして作成された予測画像フレームに対応する画像と現在の撮影画像(実際の撮影画像)とを比較し(ステップT22)、その差分を計算して先行車両である車両5の進行方向を予測する(ステップT23)。具体的に説明すると、車両周辺監視装置25は、時間「t1」が経過すると、予測画像フレーム「A1」に対応する画像と時間「t1」が経過した時点での撮影画像とを比較し、その差分を計算して先行車両である車両5の進行方向を予測する。そして、車両周辺監視装置25は、その予測された進行方向に基づいて前後車両用通信装置22からの電波の放射方向を調整する(ステップT24)。
【0040】
尚、この場合、車両周辺監視装置25は、図6(a)に示すように、撮影画像を画像解析して道路形状を識別し、先行車両である車両5および後続車両である車両2が直線道路を走行している旨を検出すると、フレームの形状を変形することなく(矩形のフレームを維持したまま)予測画像フレームを順次作成することになるが、一方、図6(b)に示すように、先行車両である車両5および後続車両である車両2がカーブ道路を走行している旨を検出すると、フレームの形状をカーブの曲率に応じて変形させて予測画像フレームを順次作成することになる(「A3´」参照)。また、道路形状は、カーナビゲーション装置で利用される道路地図データから読出されても良い。
【0041】
以上に説明した一連の処理により、後続車両である車両2に搭載されている車載通信システム1では、前後車両用通信装置22からの電波の放射を開始させた以後は、撮影画像から予測画像フレームを作成し、予測画像フレームに対応する画像と実際の撮影画像とを比較して先行車両である車両5の進行方向を予測し、その予測された進行方向に基づいて前後車両用通信装置22からの電波の放射方向を調整する。
【0042】
ところで、以上は、図7に示すように、車両5と車両2とが縦走している場合に、後続車両である車両2に搭載されている車載通信システム21が先行車両である車両5に搭載されている通信状態表示装置51を撮影し、後続車両である車両2に搭載されている前後車両用通信装置22と先行車両である車両5に搭載されている車載通信装置52とが他の車々間通信や路車間通信に影響を及ぼさない車々間通信を行う場合を説明したものであるが、車両2と車両7とが並走している場合にも、側方車両用通信装置23を用いて同様の制御を行うことにより、他の車々間通信や路車間通信に影響を及ぼさない車々間通信を行うことが可能である。また、図示しないが、対向する2台の車両同士の間でも、対向車両用通信装置24を用いて同様の制御を行うことにより、他の車々間通信や路車間通信に影響を及ぼさない車々間通信を行うことが可能である。
【0043】
尚、図7では、車両2からの先行車両である車両5に対する車載カメラの撮影視野を破線「P1」にて示す領域として示しており、車両2からの先行車両である車両5に対する前後車両用通信装置22の通信範囲(電波の放射範囲)を破線「Q1」にて示す領域として示している。また、車両2からの並走車両である車両7に対する車載カメラの撮影視野を破線「P2」にて示す領域として示しており、車両2からの並走車両である車両7に対する側方車両用通信装置23の通信範囲を破線「Q2」にて示す領域として示している。このように車載カメラの撮影視野が広く且つ車両用通信装置22,23の通信範囲が狭いことから、通信状態表示装置51を追跡し、撮影画像を画像解析することにより、電波の放射方向を調整することが可能となるものである。
【0044】
また、以上は、車々間通信を1対1で行う場合を説明したものであるが、車々間通信を1対n(nは2以上の正数)で行うことも可能である。すなわち、図8(a)に示すように、3台の車両101〜103が縦走している場合であれば、真中の車両101に搭載されている車載通信システム101aにおいて、車両周辺監視装置が先行車両102の車両後部に搭載されている通信状態表示装置102aを撮影すると共に後続車両103の車両前部に搭載されている通信状態表示装置103aを撮影し、先行車両102に搭載されている車載通信装置の通信状態や後続車両103に搭載されている車載通信装置の通信状態を識別し、それら車載通信装置が行っている他の車々間通信や路車間通信に影響を及ぼさない通信方法を選択することにより、先行車両102との間の車々間通信や後続車両103との間の車々間通信を他の車々間通信や路車間通信と衝突したり干渉したりすることなく同時に行うことが可能である。そして、このように先行車両102や後続車両103との間で車々間通信を行い、先行車両102や後続車両103の走行情報(ブレーキ動作やアクセル動作などに関する情報)状態を取得することにより、安全走行制御装置30によりブレーキ制御やアクセル制御などを適切に行うことができ、適切な運転支援を実現することができる。
【0045】
さらに、図8(b)に示すように、4台の車両が縦走していたり並走していたりする場合でも、例えば車両201に搭載されている車載通信システム201aにおいて、車両周辺監視装置が先行車両202の車両後部に搭載されている通信状態表示装置202aを撮影すると共に並走車両203,204の車両側部に搭載されている通信状態表示装置203a,204aを撮影し、上記した制御と同様の制御を行うことにより、先行車両202との間の車々間通信や並走車両203,204との間の車々間通信を他の車々間通信や路車間通信と衝突したり干渉したりすることなく同時に行うことが可能である。そして、この場合は、このように先行車両202や並走車両203,204との間で車々間通信を行い、先行車両202や並走車両203,204の走行情報(ブレーキ動作やアクセル動作やステアリング動作などに関する情報)状態を取得することにより、安全走行制御装置30によりブレーキ制御やアクセル制御やステアリング制御などを適切に行うことができ、適切な運転支援を実現することができる。
【0046】
以上に説明したように本実施形態によれば、車々間通信制御システム1において、先行車両である車両5に搭載されている通信状態表示装置51は、車載通信装置52の通信状態を表示し、後続車両である車両2に搭載されている車載通信システム21は、通信状態表示装置52を撮影して撮影画像を画像解析して車載通信装置51の通信状態を識別すると共に、後続車両である車両2と先行車両である車両5との位置関係を識別し、それら識別された車載通信装置52の通信状態および後続車両である車両2と先行車両である車両5との位置関係に基づいて他の車々間通信や路車間通信に影響を及ぼさない前後車両用通信装置22と車載通信装置52とが行い得る車々間通信の通信方法を特定し、その特定された通信方法にしたがって前後車両用通信装置22と車載通信装置52とが車々間通信を行うように制御する。これにより、従来のものとは異なって、複雑な制御を必要とすることなく、後続車両である車両2に搭載されている前後車両用通信装置22と先行車両である車両5に搭載されている車載通信装置52とが車々間通信を他の車々間通信や路車間通信と衝突したり干渉したりすることなく適切に行うことができる。
【0047】
本発明は、上記した実施形態にのみ限定されるものではなく、以下のように変形または拡張することができる。
前後車両用通信装置と側方車両用通信装置と対向車両用通信装置とが別々に搭載されている構成に限らず、これらと同等の機能を有する(兼用する)1つの車両用通信装置が搭載されている構成であっても良い。
【0048】
先行車両に搭載されている通信状態表示装置は、車載通信装置の通信状態を文字情報として表示する構成であっても良く、後続車両に搭載されている車載通信システムは、文字認識機能を有することにより、通信状態表示装置に表示されている文字情報を識別し、車載通信装置の通信状態を識別する構成であっても良い。
【0049】
通信媒体として超音波を用いる構成であっても良い。また、通信媒体を選択する場合に、車々間通信を近距離で行う(所定距離未満で行う)場合には超音波を選択し、一方、車々間通信を遠距離で行う(所定距離以上で行う)場合には電波を選択する構成であっても良い。また、車々間通信で要求される指向性のレベルに応じて通信媒体を選択する構成であっても良い。さらに、通信方式として、FDMA、TDMAおよびスペクトラム拡散のうちいずれかを選択可能な構成であっても良い。
【図面の簡単な説明】
【0050】
【図1】本発明の一実施形態の全体構成を示す機能ブロック図
【図2】通信状態表示装置が車両後部に取付けられている態様を示す図
【図3】通信制御装置が行う処理を示すフローチャート
【図4】車両周辺監視装置が行う処理を示すフローチャート
【図5】図4相当図
【図6】予測画像フレームを概略的に示す図
【図7】先行車両や並走車両と車々間通信を行う態様を概略的に示す図
【図8】先行車両や並走車両と車々間通信を行って走行制御を行う態様を概略的に示す図
【符号の説明】
【0051】
図面中、1は車々間通信制御システム、2は車両(第1の車両)、5は車両(第2の車両)、21は車載通信システム、22は前後車両用通信装置(第1の車載通信装置)、51は通信状態表示装置、52は車載通信装置(第2の車載通信装置)である。
【特許請求の範囲】
【請求項1】
第1の車両に搭載されている第1の車載通信装置と第2の車両に搭載されている第2の車載通信装置とが行う車々間通信を制御する車々間通信制御システムであって、
前記第2の車両に搭載され、前記第2の車載通信装置の通信状態を表す表示情報を表示する通信状態表示装置と、
前記第1の車両に搭載され、前記通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して前記第2の車載通信装置の通信状態を識別すると共に、前記第1の車両と前記第2の車両との位置関係を識別し、それら識別された前記第2の車載通信装置の通信状態および前記第1の車両と前記第2の車両との位置関係に基づいて他の車々間通信や路車間通信に影響を及ぼさない前記第1の車載通信装置と前記第2の車載通信装置とが行い得る車々間通信の通信方法を特定し、その特定された通信方法にしたがって前記第1の車載通信装置と前記第2の車載通信装置とが車々間通信を行うように制御する車載通信システムとを備えたことを特徴とする車々間通信制御システム。
【請求項2】
請求項1に記載した車々間通信制御システムにおいて、
前記通信状態表示装置は、前記第2の車載通信装置の通信媒体の使用状態を表す表示情報を表示し、
前記車載通信システムは、前記通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して前記第2の車載通信装置の通信媒体の使用状態を識別することを特徴とする車々間通信制御システム。
【請求項3】
請求項1または2に記載した車々間通信制御システムにおいて、
前記通信状態表示装置は、前記第2の車載通信装置の通信チャネルの使用状態を表す表示情報を表示し、
前記車載通信システムは、前記通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して前記第2の車載通信装置の通信チャネルの使用状態を識別することを特徴とする車々間通信制御システム。
【請求項4】
請求項1ないし3のいずれかに記載した車々間通信制御システムにおいて、
前記車載通信システムは、撮影画像を画像解析して前記第2の車両の現在位置を検出し、前記第1の車両と前記第2の車両との位置関係を識別することを特徴とする車々間通信制御システム。
【請求項5】
請求項1ないし4のいずれかに記載した車々間通信制御システムにおいて、
前記車載通信システムは、前記第1の車両と前記第2の車両との位置関係に基づいて前記第1の車載通信装置から放射される電波が前記第2の車載通信装置に捕捉されるように電波の放射方向を決定し、その決定された放射方向へ前記第1の車載通信装置からの電波の放射を開始させ、前記第1の車載通信装置と前記第2の車載通信装置とが車々間通信を開始するように制御することを特徴とする車々間通信制御システム。
【請求項6】
請求項5に記載した車々間通信制御システムにおいて、
前記車載通信システムは、前記第1の車載通信装置からの電波の放射を開始させた以後では、撮影画像から所定時間経過後の撮影画像に対応する予測画像フレームを作成し、過去の撮影画像から作成された予測画像フレームに対応する画像と現在の撮影画像とを比較して前記第2の車両の進行方向を予測し、その予測された進行方向に基づいて前記第1の車載通信装置からの電波の放射方向を調整することを特徴とする車々間通信制御システム。
【請求項7】
第1の車両に搭載されている第1の車載通信装置と第2の車両に搭載されている第2の車載通信装置とが行う車々間通信を制御する車々間通信制御システム内にあって前記第1の車両に搭載され、前記第2の車両に搭載されている通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して前記第2の車載通信装置の通信状態を識別すると共に、前記第1の車両と前記第2の車両との位置関係を識別し、それら識別された前記第2の車載通信装置の通信状態および前記第1の車両と前記第2の車両との位置関係に基づいて他の車々間通信や路車間通信に影響を及ぼさない前記第1の車載通信装置と前記第2の車載通信装置とが行い得る車々間通信の通信方法を特定し、その特定された通信方法にしたがって前記第1の車載通信装置と前記第2の車載通信装置とが車々間通信を行うように制御することを特徴とする車載通信システム。
【請求項8】
第1の車両に搭載されている第1の車載通信装置と第2の車両に搭載されている第2の車載通信装置とが行う車々間通信を制御する車々間通信制御システム内にあって前記第2の車両に搭載され、前記第2の車載通信装置の通信状態を表す表示情報を表示することを特徴とする通信状態表示装置。
【請求項1】
第1の車両に搭載されている第1の車載通信装置と第2の車両に搭載されている第2の車載通信装置とが行う車々間通信を制御する車々間通信制御システムであって、
前記第2の車両に搭載され、前記第2の車載通信装置の通信状態を表す表示情報を表示する通信状態表示装置と、
前記第1の車両に搭載され、前記通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して前記第2の車載通信装置の通信状態を識別すると共に、前記第1の車両と前記第2の車両との位置関係を識別し、それら識別された前記第2の車載通信装置の通信状態および前記第1の車両と前記第2の車両との位置関係に基づいて他の車々間通信や路車間通信に影響を及ぼさない前記第1の車載通信装置と前記第2の車載通信装置とが行い得る車々間通信の通信方法を特定し、その特定された通信方法にしたがって前記第1の車載通信装置と前記第2の車載通信装置とが車々間通信を行うように制御する車載通信システムとを備えたことを特徴とする車々間通信制御システム。
【請求項2】
請求項1に記載した車々間通信制御システムにおいて、
前記通信状態表示装置は、前記第2の車載通信装置の通信媒体の使用状態を表す表示情報を表示し、
前記車載通信システムは、前記通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して前記第2の車載通信装置の通信媒体の使用状態を識別することを特徴とする車々間通信制御システム。
【請求項3】
請求項1または2に記載した車々間通信制御システムにおいて、
前記通信状態表示装置は、前記第2の車載通信装置の通信チャネルの使用状態を表す表示情報を表示し、
前記車載通信システムは、前記通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して前記第2の車載通信装置の通信チャネルの使用状態を識別することを特徴とする車々間通信制御システム。
【請求項4】
請求項1ないし3のいずれかに記載した車々間通信制御システムにおいて、
前記車載通信システムは、撮影画像を画像解析して前記第2の車両の現在位置を検出し、前記第1の車両と前記第2の車両との位置関係を識別することを特徴とする車々間通信制御システム。
【請求項5】
請求項1ないし4のいずれかに記載した車々間通信制御システムにおいて、
前記車載通信システムは、前記第1の車両と前記第2の車両との位置関係に基づいて前記第1の車載通信装置から放射される電波が前記第2の車載通信装置に捕捉されるように電波の放射方向を決定し、その決定された放射方向へ前記第1の車載通信装置からの電波の放射を開始させ、前記第1の車載通信装置と前記第2の車載通信装置とが車々間通信を開始するように制御することを特徴とする車々間通信制御システム。
【請求項6】
請求項5に記載した車々間通信制御システムにおいて、
前記車載通信システムは、前記第1の車載通信装置からの電波の放射を開始させた以後では、撮影画像から所定時間経過後の撮影画像に対応する予測画像フレームを作成し、過去の撮影画像から作成された予測画像フレームに対応する画像と現在の撮影画像とを比較して前記第2の車両の進行方向を予測し、その予測された進行方向に基づいて前記第1の車載通信装置からの電波の放射方向を調整することを特徴とする車々間通信制御システム。
【請求項7】
第1の車両に搭載されている第1の車載通信装置と第2の車両に搭載されている第2の車載通信装置とが行う車々間通信を制御する車々間通信制御システム内にあって前記第1の車両に搭載され、前記第2の車両に搭載されている通信状態表示装置に表示されている表示情報を撮影して撮影画像を画像解析して前記第2の車載通信装置の通信状態を識別すると共に、前記第1の車両と前記第2の車両との位置関係を識別し、それら識別された前記第2の車載通信装置の通信状態および前記第1の車両と前記第2の車両との位置関係に基づいて他の車々間通信や路車間通信に影響を及ぼさない前記第1の車載通信装置と前記第2の車載通信装置とが行い得る車々間通信の通信方法を特定し、その特定された通信方法にしたがって前記第1の車載通信装置と前記第2の車載通信装置とが車々間通信を行うように制御することを特徴とする車載通信システム。
【請求項8】
第1の車両に搭載されている第1の車載通信装置と第2の車両に搭載されている第2の車載通信装置とが行う車々間通信を制御する車々間通信制御システム内にあって前記第2の車両に搭載され、前記第2の車載通信装置の通信状態を表す表示情報を表示することを特徴とする通信状態表示装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2006−33264(P2006−33264A)
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願番号】特願2004−207374(P2004−207374)
【出願日】平成16年7月14日(2004.7.14)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願日】平成16年7月14日(2004.7.14)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]