
車上装置、及び、自列車位置認識方法
【課題】走行中の列車の現在位置を、低コストで把握するとともに、連続的かつ高精度に把握しうる車上装置、及び、列車の自列車位置認識方法を提供する。
【解決手段】本発明に係る車上装置1は、非接触式センサ20と、地物情報のデータベース30とを有し、非接触式センサ20から供給される地物検知信号s2を、前記地物情報と照合して自列車位置を認識する。
【解決手段】本発明に係る車上装置1は、非接触式センサ20と、地物情報のデータベース30とを有し、非接触式センサ20から供給される地物検知信号s2を、前記地物情報と照合して自列車位置を認識する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車上装置、及び、自列車位置認識方法に関する。
【背景技術】
【0002】
従来、走行中の列車の現在位置を把握する先行技術文献として、例えば特許文献1が知られている。特許文献1の車上装置を構成する速度発電機は、列車の車輪に取り付けられ、車輪の回転に応じた周期性を持つ電圧信号を生成し、速度信号として信号処理回路に供給する。信号処理回路は、前記速度信号から走行中の列車の現在位置を算出し、算出した走行距離に基づいて軌道上における自列車位置を把握するものである。
【0003】
ところで、速度信号から把握される自列車の現在位置と、実際の列車の現在位置とは、必ずしも一致しないことが知られている。例えば、この種の速度発電機では、列車が時速5km以下の極低速領域で走行している場合、速度信号は生成されない。その結果、列車が実際に走行しているにもかかわらず、速度信号から走行を検知できないこととなり、速度信号から把握される自列車の現在位置と、実際の列車の現在位置との間で位置ずれが生じる。
【0004】
また、列車が悪天候下を走行する場合、例えば雨や雪、霧などの水分がレール上に付着すると、この付着した水分によりレールと車輪との摩擦係数が低下する。その結果、空転や滑走などの不具合が生じることとなり、速度信号から把握される自列車の現在位置と、実際の列車の現在位置との間で位置ずれが生じる。
【0005】
上述した位置ずれにより自列車の現在位置を誤って認識していると、冒進事故や、最悪の場合には、列車同士の衝突など重大な死傷事故を招きかねないため、自列車位置は正確に把握されなければならない。前記位置ずれを補正する従来技術として、例えば特許文献2がある。特許文献2の自動列車停止装置では、地上装置から車上装置に絶対位置情報を送信することにより、前記位置ずれが補正される。
【0006】
また、特許文献3の自動列車制御装置では、在線する各列車に無線機を搭載し、先行列車および後続列車と無線通信を行って自列車の位置を相対的に把握することにより、前記位置ずれが補正される。
【0007】
さらに、列車に、全地球測位システム(GPS:Global Positioning System)のGPS受信機などパッシブな位置情報受信機を搭載することにより、前記位置ずれを補正することも行われている。
【0008】
しかし、上述した従来技術では、以下の点で新たな問題が生じることとなる。まず、特許文献2では、地上装置を設置しなければならない分だけコスト高を招く。特に、この種の地上装置は、軌道の全長に渡って、その閉そく区間毎に設置されるから、その設置数に比例して莫大な費用負担を強いられることとなる。
【0009】
また、特許文献3では、在線する各列車毎に無線機を搭載しなければならないから、コスト高を招く。同様の問題は、列車にGPS受信機を搭載する構成でも生じる。しかも、GPS電波は、地理的条件によっては受信できない。その結果、列車が、例えばトンネル内や駅校舎内、高層ビル群の間や山間部などを走行している間は、GPS電波を受信できず、その結果、前記位置ずれを補正することができないこととなる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平06−197404号公報
【特許文献2】特開2010−259194号公報
【特許文献3】特開2001−213317号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明の課題は、走行中の列車の現在位置を、低コストで把握しうる車上装置、及び、列車の自列車位置認識方法を提供することである。
【0012】
本発明のもう1つの課題は、走行中の列車の現在位置を、連続的、かつ、高精度に把握しうる車上装置、及び、列車の自列車位置認識方法を提供することである。
【課題を解決するための手段】
【0013】
上述した課題を解決するため、本発明に係る車上装置は、非接触式センサと、地物情報のデータベースとを有し、センサから供給される地物検知信号を、地物情報と照合して自列車位置を認識する。
【0014】
上述したように、本発明の特徴は、地物、すなわち在線する軌道付近にもともと存在する枕木やレール、架線の繋ぎ目や碍子、ガントリーなどを用いて自列車位置を認識する点に特徴の一つがある。具体的に、本発明に係る車上装置による自列車位置認識方法では、非接触式センサによって、特定の地物を検出して地物検知信号を供給し、地物検知信号と、車上データベースの地物情報とを照合して自列車位置を認識する。この構成によると、自列車位置を認識するため、地上側に新たな設備を設置する必要はないから、走行中の列車の現在位置を、低コストで把握しうる車上装置、及び、列車の自列車位置認識方法を提供することができる。
【0015】
また、本願発明は、軌道に沿って固定的に設置されている地物を検知対象物とするから、走行中の列車の現在位置を、高精度に算出しうる車上装置、及び、列車の自列車位置認識方法を提供することができる。もちろん、走行中の列車の現在位置を、高精度に算出することにより、速度信号から把握される自列車の現在位置と、実際の列車の現在位置との間の位置ずれの問題は解消される。
【0016】
上述した地物は、もともと軌道に沿って連続的に設置されているから、列車の現在位置を、連続的に算出しうる車上装置、及び、列車の自列車位置認識方法を提供することができる。
【発明の効果】
【0017】
以上述べたように、本発明によれば、次のような効果を得ることができる。
(1)走行中の列車の現在位置を、低コストで把握しうる車上装置、及び、列車の自列車位置認識方法を提供することができる。
(2)走行中の列車の現在位置を、連続的かつ高精度に把握しうる車上装置、及び、列車の自列車位置認識方法を提供することができる。
【0018】
本発明の他の目的、構成及び利点については、添付図面を参照し、更に詳しく説明する。添付図面は、単に、例示に過ぎない。
【図面の簡単な説明】
【0019】
【図1】本発明の実施形態に係る車上装置のブロック図である。
【図2】図1の車上装置による自列車位置認識方法について模式的に示す図である。
【発明を実施するための形態】
【0020】
図1乃至図2において同一符号は、同一又は対応部分を示すものとする。本発明の実施形態に係る車上装置は、主として列車の現在位置を把握するために用いられるものであって、非接触式センサ20と、地物情報のデータベースとを有し、非接触式センサ20から供給される地物検知信号s2を、地物情報と照合して走行中の自列車の現在位置を算出する点に特徴がある。
【0021】
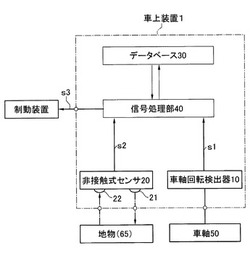
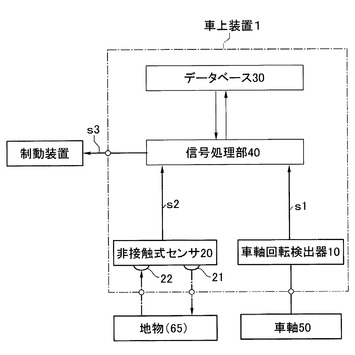
図1及び図2の車上装置1は、車軸回転検出器10と、非接触式センサ20と、データベース30と、信号処理部40とを含む。
【0022】
車軸回転検出器10は、車輪50又は車軸付近に取り付けられ、車輪50又は車軸の回転に応じた周期性を持つ電圧信号を生成し、速度信号s1として出力するものであり、例えば速度発電機などがこれにあたる。速度信号s1は、情報伝送ケーブルを介して信号処理部40に供給される。
【0023】
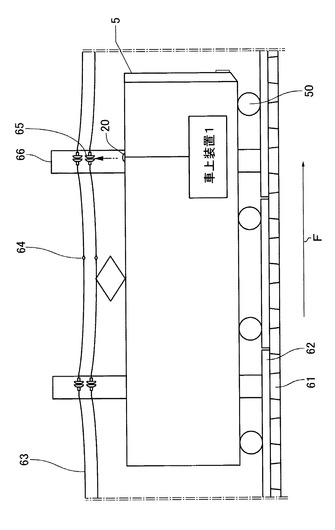
非接触式センサ20は、車両5の外面に配置され、所定の地物に対して電磁波を送信する。ここで「地物」とは、この種の鉄道路線に設置される設備インフラを広く指す言葉であって、典型的には枕木61や、レール62、架線63、架線63の繋ぎ目64や碍子65、架線63の支柱66のほか、図示しないガントリーや手すりなどがこれに該当する。また、送信される電磁波は、この種の分野において周知のものを用いることができる。
【0024】
車両5における非接触式センサ20の設置位置、及び、向きは、検知対象物(ターゲット)とする地物の設置位置に追従して決定される。すなわち、架線63や、繋ぎ目64、碍子65などをターゲットとする場合、非接触式センサ20は、車両5の屋根部分に、上向きに配置される。また、ターゲットが支柱66などの場合には、非接触式センサ20は車体側面に、水平方向に向けて配置され、ターゲットが枕木61や、レール62の場合には、非接触式センサ20は車体底面に、下向きに配置される。
【0025】
非接触式センサ20は、ターゲットとして予め設定された地物に対して電磁波を送信し、地物から反射した電磁波(反射波)を受信し、受信結果に基づいて地物検知信号s2を生成する。非接触式センサ20は、パルス状の電磁波を送信し、送信をしない間は受信を行なうパルスレーダー方式や、送信用アンテナと受信用アンテナの2つを備え、常時送受信を行なうレーダー方式で構成することができる。
【0026】
図2では、非接触式センサ20は、送波器21から碍子65に向かって電磁波を送信し、碍子65に反射した電磁波(反射波)が受波器22によって受信される。非接触式センサ20は、反射波の有無によって地物を検知し、反射波があったときは地物検知信号s2を生成し、生成した地物検知信号s2を信号処理部40に供給する。
【0027】
図1及び図2からは必ずしも明らかではないが、データベース30は、この種の車上装置を構成するメモリ領域の一部であり、地物情報が記録されている。ここで、「地物情報」とは、自列車が走行する軌道沿線に設置される地物の種類や設置数、設置位置、設置順番、設置間隔のほか、所定の地物から閉そく境界までの距離などを含む。
【0028】
信号処理部40は、非接触式センサ20から供給される地物検知信号s2を、地物情報と照合して自列車位置を認識する。より詳細に説明すると、まず、信号処理部40は、車軸回転検出器10から継続的に供給される速度信号s1に基づいて、自列車の走行速度と走行距離とを常時算出し、自列車の現在位置を把握している。
【0029】
他方、信号処理部40は、速度信号s1に基づいて自列車の現在位置を把握すると同時に、非接触式センサ20から供給される地物検知信号s2をデータベース30の地物情報と照合して自列車の現在位置を把握する。具体的には、信号処理部40は、地物検知信号s2を地物情報と照合し、走行中、ターゲットとして設定された地物を常時カウントすることにより、自列車の現在位置を把握する。例えば、碍子65をターゲットとする場合、データベース30には、在線する軌道の全長情報に加え、始発駅から終着駅までの間の碍子65の設置数、設置間隔、設置位置が記録されており、地物検知信号s2に基づいて始発駅からの碍子65の数をカウントすることにより、「○○個目の碍子65を通過したから、自列車は始発駅から○○km地点にいる」ということが把握される。
【0030】
そして速度信号s1から把握される自列車の現在位置と、地物検知信号s2から把握される自列車の現在位置の間で位置ずれがあるときは、速度信号s1から把握された自列車の現在位置を補正又はリセットし、地物検知信号s2による自列車の現在位置情報に基づいて、当該軌道における自列車の実際の列車の現在位置を把握する。
【0031】
図1及び図2からは必ずしも明らかではないが、信号処理部40は、把握した自列車の現在位置情報と、さらに外部から供給される閉そく信号機の現示情報に基づいてブレーキパターンs3を生成し、生成したブレーキパターンs3を制動装置7に供給することにより、列車制御が行われることとなる。
【0032】
ところで、既に、若干説明したことであるが、速度信号s1から把握される自列車の現在位置と、実際の列車の現在位置とは、必ずしも一致しないことが知られている。例えば、この種の速度発電機では、列車が時速5km以下の極低速領域で走行している場合、速度信号s1は生成されない。その結果、列車が実際に走行しているにもかかわらず、速度信号s1から走行を検知できないこととなり、速度信号s1から把握される自列車の現在位置と、実際の列車の現在位置との間で位置ずれが生じる。
【0033】
また、列車が悪天候下を走行する場合、例えば雨や雪、霧などの水分がレール上に付着すると、この付着した水分によりレールと車輪との摩擦係数が低下する。その結果、空転や滑走などの不具合が生じることとなり、速度信号s1から把握される自列車の現在位置と、実際の列車の現在位置との間で位置ずれが生じる。
【0034】
ここで空転とは、主に車両5の加速時に生じる現象であり、車輪50のみが進行方向(順方向)に空回りする現象を指す。この空転が生じた場合、瞬間的に、高速回転を示す速度信号s1が生成されることとなり、車両5の実際の走行距離よりも、速度信号s1から算出された走行距離の方が大きくなるという不具合が生じることとなる。
【0035】
他方、滑走とは、主に車両5の減速時に生じる現象であり、急制動など車輪50の回転数の低下(又は停止)をきっかけとして、車輪50がレール62上を滑る現象を指す。この滑走が生じた場合、車両5は、進行方向Fに向かって、車輪50の回転数以上に滑って移動しているから、車両5の実際の走行距離よりも、速度信号s1から算出された走行距離の方が小さくなるという不具合が生じることとなる。
【0036】
上述した位置ずれによって、自列車の現在位置を誤って認識していると、冒進事故や、最悪の場合には、列車同士の衝突など重大な死傷事故を招きかねないため、自列車位置は正確に把握されなければならない。特に、自動列車停止装置(いわゆATS装置)や、パターン制御式速度照査機能付き自動列車停止装置(いわゆるATS−P装置)などでは、自列車の現在位置からブレーキパターンs3を設定するので、位置ずれによって自列車の現在位置情報に誤差がある場合、適切なブレーキパターンs3を生成することができなくなる。
【0037】
上述した位置ずれを補正する従来技術として、従来のATS装置やATS−P装置などでは、地上装置から車上装置に絶対位置情報を送信することにより、位置ずれが補正される。
【0038】
また、自動列車制御装置(ATC/TD装置)では、在線する各列車に無線機を搭載し、先行列車および後続列車と無線通信を行って自列車の位置を相対的に把握することにより、位置ずれが補正される。
【0039】
さらに、車両5に全地球測位システム(GPS:Global Positioning System)のGPS受信機など、パッシブな位置情報受信機を列車に搭載することにより、位置ずれを補正することも行われている。
【0040】
しかし、上述した従来の位置ずれ補正技術には、下記の点で新たな問題が生じることとなる。まず、地上装置からの絶対位置情報に基づいて位置ずれを補正する構成では、位置精度が地上装置の設置数に左右されるため、位置精度を高める必要が生じた場合、地上装置の設置数を増やす必要があり、コスト高を招く。特に、この種の地上装置は、軌道の全長に渡って、その閉そく区間毎に設置されるから、その設置数に比例して莫大な費用負担を強いられることとなる。
【0041】
また、自動列車制御装置(ATC/TD装置)では、在線する各列車に無線機を搭載しなければならないから、コスト高を招く。同様の問題は、列車にGPS受信機を搭載する構成でも生じる。しかも、GPS電波は、地理的条件によっては受信できない。その結果、列車が、例えばトンネル内や駅校舎内、高層ビル群の間や山間部などを走行している間は、GPS電波を受信できず、その結果、前記位置ずれを補正することができないこととなる。
【0042】
これに対し、本発明は、上述した従来技術の不具合を全て解決し、走行中の列車の現在位置を、低コストで、しかも連続的かつ高精度に算出しうる車上装置、及び、列車の自列車位置認識方法を提供するものである。すなわち、図1及び図2を参照して説明したように、車上装置1は、非接触式センサ20から入力される地物検知信号s2に基づいて走行中の列車の現在位置を常時認識する。ここで、検知対象物たる地物は、在線する軌道付近にもともと存在する枕木61やレール62、繋ぎ目64や碍子65などから適宜選択される。上述したように、車上装置1では、在線する軌道付近にもともと存在する地物(61〜66)を利用し、速度信号s1から把握される自列車の現在位置と、実際の列車の現在位置との間で位置ずれを解消するため地上側に新たな設備を設置する必要はないから、走行中の列車の現在位置を、低コストで把握しうる車上装置1、及び、自列車位置認識方法を提供することができる。
【0043】
上述した地物(61〜66)は、もともと軌道に沿って連続的に設置されている。しかも鉄道は、特定の軌道のみを走行するものであるから、在線する軌道において地物(61〜66)の種類、設置位置、及び、設置間隔は、固定的であり、変化することがないから、走行中の列車の現在位置を、連続的かつ高精度に把握しうる車上装置1、及び、車両5の自列車位置認識方法を提供することができる。
【0044】
以上、好ましい実施例を参照して本発明の内容を具体的に説明したが、本発明の基本的技術思想及び教示に基づいて、当業者であれば、種種の変形態様を採り得ることは自明である。例えば、本発明に係る車上装置1は、路面電車やモノレール、新交通システムなどにおいても適用することができる。
【0045】
また、図1及び図2の非接触式センサ20は、常時作動させる必要はなく、走行検知不能となる極低速領域の走行時や悪天候下での走行時に、補助的に作動させてもよい。
【0046】
さらに、本発明の特徴は、特定の地物(61〜66)に、車上の非接触式センサ20から電磁波を当て、その地物からの反射波に基づいて生成される地物検知信号s2をデータベースと照合することにより、車両5の現在位置を求める点に特徴がある。図1及び図2は、上述した観点から必要最小数の非接触式センサ20を示すものであって、例えば非接触式センサ20の設置数を増やし、それによって位置精度を向上しうることは明白である。
【0047】
加えて、上述した本発明の技術思想からすれば、ターゲットとなる地物を同時に複数設定することもできる。例えば、一つの車両5において、その屋根部分に碍子65をターゲットとする非接触式センサ20を設け、同車体側面に支柱66をターゲットとする非接触式センサ20を設け、同車体底面に枕木61をターゲットとする非接触式センサ20を設けてもよい。この構成によると、位置精度を向上することができるとともに、いずれかの非接触式センサ20が故障した場合であっても、他の非接触式センサ20からの地物検知信号s2(s2)をデータベースに照合して自列車の現在位置を把握し、車両5の実際の走行距離と、速度信号s1から算出された走行距離との間の位置ずれを補正することができる。
【符号の説明】
【0048】
1 車上装置
10 車軸回転検出器
20 非接触式センサ
30 データベース
s2 地物検知信号
【技術分野】
【0001】
本発明は、車上装置、及び、自列車位置認識方法に関する。
【背景技術】
【0002】
従来、走行中の列車の現在位置を把握する先行技術文献として、例えば特許文献1が知られている。特許文献1の車上装置を構成する速度発電機は、列車の車輪に取り付けられ、車輪の回転に応じた周期性を持つ電圧信号を生成し、速度信号として信号処理回路に供給する。信号処理回路は、前記速度信号から走行中の列車の現在位置を算出し、算出した走行距離に基づいて軌道上における自列車位置を把握するものである。
【0003】
ところで、速度信号から把握される自列車の現在位置と、実際の列車の現在位置とは、必ずしも一致しないことが知られている。例えば、この種の速度発電機では、列車が時速5km以下の極低速領域で走行している場合、速度信号は生成されない。その結果、列車が実際に走行しているにもかかわらず、速度信号から走行を検知できないこととなり、速度信号から把握される自列車の現在位置と、実際の列車の現在位置との間で位置ずれが生じる。
【0004】
また、列車が悪天候下を走行する場合、例えば雨や雪、霧などの水分がレール上に付着すると、この付着した水分によりレールと車輪との摩擦係数が低下する。その結果、空転や滑走などの不具合が生じることとなり、速度信号から把握される自列車の現在位置と、実際の列車の現在位置との間で位置ずれが生じる。
【0005】
上述した位置ずれにより自列車の現在位置を誤って認識していると、冒進事故や、最悪の場合には、列車同士の衝突など重大な死傷事故を招きかねないため、自列車位置は正確に把握されなければならない。前記位置ずれを補正する従来技術として、例えば特許文献2がある。特許文献2の自動列車停止装置では、地上装置から車上装置に絶対位置情報を送信することにより、前記位置ずれが補正される。
【0006】
また、特許文献3の自動列車制御装置では、在線する各列車に無線機を搭載し、先行列車および後続列車と無線通信を行って自列車の位置を相対的に把握することにより、前記位置ずれが補正される。
【0007】
さらに、列車に、全地球測位システム(GPS:Global Positioning System)のGPS受信機などパッシブな位置情報受信機を搭載することにより、前記位置ずれを補正することも行われている。
【0008】
しかし、上述した従来技術では、以下の点で新たな問題が生じることとなる。まず、特許文献2では、地上装置を設置しなければならない分だけコスト高を招く。特に、この種の地上装置は、軌道の全長に渡って、その閉そく区間毎に設置されるから、その設置数に比例して莫大な費用負担を強いられることとなる。
【0009】
また、特許文献3では、在線する各列車毎に無線機を搭載しなければならないから、コスト高を招く。同様の問題は、列車にGPS受信機を搭載する構成でも生じる。しかも、GPS電波は、地理的条件によっては受信できない。その結果、列車が、例えばトンネル内や駅校舎内、高層ビル群の間や山間部などを走行している間は、GPS電波を受信できず、その結果、前記位置ずれを補正することができないこととなる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平06−197404号公報
【特許文献2】特開2010−259194号公報
【特許文献3】特開2001−213317号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明の課題は、走行中の列車の現在位置を、低コストで把握しうる車上装置、及び、列車の自列車位置認識方法を提供することである。
【0012】
本発明のもう1つの課題は、走行中の列車の現在位置を、連続的、かつ、高精度に把握しうる車上装置、及び、列車の自列車位置認識方法を提供することである。
【課題を解決するための手段】
【0013】
上述した課題を解決するため、本発明に係る車上装置は、非接触式センサと、地物情報のデータベースとを有し、センサから供給される地物検知信号を、地物情報と照合して自列車位置を認識する。
【0014】
上述したように、本発明の特徴は、地物、すなわち在線する軌道付近にもともと存在する枕木やレール、架線の繋ぎ目や碍子、ガントリーなどを用いて自列車位置を認識する点に特徴の一つがある。具体的に、本発明に係る車上装置による自列車位置認識方法では、非接触式センサによって、特定の地物を検出して地物検知信号を供給し、地物検知信号と、車上データベースの地物情報とを照合して自列車位置を認識する。この構成によると、自列車位置を認識するため、地上側に新たな設備を設置する必要はないから、走行中の列車の現在位置を、低コストで把握しうる車上装置、及び、列車の自列車位置認識方法を提供することができる。
【0015】
また、本願発明は、軌道に沿って固定的に設置されている地物を検知対象物とするから、走行中の列車の現在位置を、高精度に算出しうる車上装置、及び、列車の自列車位置認識方法を提供することができる。もちろん、走行中の列車の現在位置を、高精度に算出することにより、速度信号から把握される自列車の現在位置と、実際の列車の現在位置との間の位置ずれの問題は解消される。
【0016】
上述した地物は、もともと軌道に沿って連続的に設置されているから、列車の現在位置を、連続的に算出しうる車上装置、及び、列車の自列車位置認識方法を提供することができる。
【発明の効果】
【0017】
以上述べたように、本発明によれば、次のような効果を得ることができる。
(1)走行中の列車の現在位置を、低コストで把握しうる車上装置、及び、列車の自列車位置認識方法を提供することができる。
(2)走行中の列車の現在位置を、連続的かつ高精度に把握しうる車上装置、及び、列車の自列車位置認識方法を提供することができる。
【0018】
本発明の他の目的、構成及び利点については、添付図面を参照し、更に詳しく説明する。添付図面は、単に、例示に過ぎない。
【図面の簡単な説明】
【0019】
【図1】本発明の実施形態に係る車上装置のブロック図である。
【図2】図1の車上装置による自列車位置認識方法について模式的に示す図である。
【発明を実施するための形態】
【0020】
図1乃至図2において同一符号は、同一又は対応部分を示すものとする。本発明の実施形態に係る車上装置は、主として列車の現在位置を把握するために用いられるものであって、非接触式センサ20と、地物情報のデータベースとを有し、非接触式センサ20から供給される地物検知信号s2を、地物情報と照合して走行中の自列車の現在位置を算出する点に特徴がある。
【0021】
図1及び図2の車上装置1は、車軸回転検出器10と、非接触式センサ20と、データベース30と、信号処理部40とを含む。
【0022】
車軸回転検出器10は、車輪50又は車軸付近に取り付けられ、車輪50又は車軸の回転に応じた周期性を持つ電圧信号を生成し、速度信号s1として出力するものであり、例えば速度発電機などがこれにあたる。速度信号s1は、情報伝送ケーブルを介して信号処理部40に供給される。
【0023】
非接触式センサ20は、車両5の外面に配置され、所定の地物に対して電磁波を送信する。ここで「地物」とは、この種の鉄道路線に設置される設備インフラを広く指す言葉であって、典型的には枕木61や、レール62、架線63、架線63の繋ぎ目64や碍子65、架線63の支柱66のほか、図示しないガントリーや手すりなどがこれに該当する。また、送信される電磁波は、この種の分野において周知のものを用いることができる。
【0024】
車両5における非接触式センサ20の設置位置、及び、向きは、検知対象物(ターゲット)とする地物の設置位置に追従して決定される。すなわち、架線63や、繋ぎ目64、碍子65などをターゲットとする場合、非接触式センサ20は、車両5の屋根部分に、上向きに配置される。また、ターゲットが支柱66などの場合には、非接触式センサ20は車体側面に、水平方向に向けて配置され、ターゲットが枕木61や、レール62の場合には、非接触式センサ20は車体底面に、下向きに配置される。
【0025】
非接触式センサ20は、ターゲットとして予め設定された地物に対して電磁波を送信し、地物から反射した電磁波(反射波)を受信し、受信結果に基づいて地物検知信号s2を生成する。非接触式センサ20は、パルス状の電磁波を送信し、送信をしない間は受信を行なうパルスレーダー方式や、送信用アンテナと受信用アンテナの2つを備え、常時送受信を行なうレーダー方式で構成することができる。
【0026】
図2では、非接触式センサ20は、送波器21から碍子65に向かって電磁波を送信し、碍子65に反射した電磁波(反射波)が受波器22によって受信される。非接触式センサ20は、反射波の有無によって地物を検知し、反射波があったときは地物検知信号s2を生成し、生成した地物検知信号s2を信号処理部40に供給する。
【0027】
図1及び図2からは必ずしも明らかではないが、データベース30は、この種の車上装置を構成するメモリ領域の一部であり、地物情報が記録されている。ここで、「地物情報」とは、自列車が走行する軌道沿線に設置される地物の種類や設置数、設置位置、設置順番、設置間隔のほか、所定の地物から閉そく境界までの距離などを含む。
【0028】
信号処理部40は、非接触式センサ20から供給される地物検知信号s2を、地物情報と照合して自列車位置を認識する。より詳細に説明すると、まず、信号処理部40は、車軸回転検出器10から継続的に供給される速度信号s1に基づいて、自列車の走行速度と走行距離とを常時算出し、自列車の現在位置を把握している。
【0029】
他方、信号処理部40は、速度信号s1に基づいて自列車の現在位置を把握すると同時に、非接触式センサ20から供給される地物検知信号s2をデータベース30の地物情報と照合して自列車の現在位置を把握する。具体的には、信号処理部40は、地物検知信号s2を地物情報と照合し、走行中、ターゲットとして設定された地物を常時カウントすることにより、自列車の現在位置を把握する。例えば、碍子65をターゲットとする場合、データベース30には、在線する軌道の全長情報に加え、始発駅から終着駅までの間の碍子65の設置数、設置間隔、設置位置が記録されており、地物検知信号s2に基づいて始発駅からの碍子65の数をカウントすることにより、「○○個目の碍子65を通過したから、自列車は始発駅から○○km地点にいる」ということが把握される。
【0030】
そして速度信号s1から把握される自列車の現在位置と、地物検知信号s2から把握される自列車の現在位置の間で位置ずれがあるときは、速度信号s1から把握された自列車の現在位置を補正又はリセットし、地物検知信号s2による自列車の現在位置情報に基づいて、当該軌道における自列車の実際の列車の現在位置を把握する。
【0031】
図1及び図2からは必ずしも明らかではないが、信号処理部40は、把握した自列車の現在位置情報と、さらに外部から供給される閉そく信号機の現示情報に基づいてブレーキパターンs3を生成し、生成したブレーキパターンs3を制動装置7に供給することにより、列車制御が行われることとなる。
【0032】
ところで、既に、若干説明したことであるが、速度信号s1から把握される自列車の現在位置と、実際の列車の現在位置とは、必ずしも一致しないことが知られている。例えば、この種の速度発電機では、列車が時速5km以下の極低速領域で走行している場合、速度信号s1は生成されない。その結果、列車が実際に走行しているにもかかわらず、速度信号s1から走行を検知できないこととなり、速度信号s1から把握される自列車の現在位置と、実際の列車の現在位置との間で位置ずれが生じる。
【0033】
また、列車が悪天候下を走行する場合、例えば雨や雪、霧などの水分がレール上に付着すると、この付着した水分によりレールと車輪との摩擦係数が低下する。その結果、空転や滑走などの不具合が生じることとなり、速度信号s1から把握される自列車の現在位置と、実際の列車の現在位置との間で位置ずれが生じる。
【0034】
ここで空転とは、主に車両5の加速時に生じる現象であり、車輪50のみが進行方向(順方向)に空回りする現象を指す。この空転が生じた場合、瞬間的に、高速回転を示す速度信号s1が生成されることとなり、車両5の実際の走行距離よりも、速度信号s1から算出された走行距離の方が大きくなるという不具合が生じることとなる。
【0035】
他方、滑走とは、主に車両5の減速時に生じる現象であり、急制動など車輪50の回転数の低下(又は停止)をきっかけとして、車輪50がレール62上を滑る現象を指す。この滑走が生じた場合、車両5は、進行方向Fに向かって、車輪50の回転数以上に滑って移動しているから、車両5の実際の走行距離よりも、速度信号s1から算出された走行距離の方が小さくなるという不具合が生じることとなる。
【0036】
上述した位置ずれによって、自列車の現在位置を誤って認識していると、冒進事故や、最悪の場合には、列車同士の衝突など重大な死傷事故を招きかねないため、自列車位置は正確に把握されなければならない。特に、自動列車停止装置(いわゆATS装置)や、パターン制御式速度照査機能付き自動列車停止装置(いわゆるATS−P装置)などでは、自列車の現在位置からブレーキパターンs3を設定するので、位置ずれによって自列車の現在位置情報に誤差がある場合、適切なブレーキパターンs3を生成することができなくなる。
【0037】
上述した位置ずれを補正する従来技術として、従来のATS装置やATS−P装置などでは、地上装置から車上装置に絶対位置情報を送信することにより、位置ずれが補正される。
【0038】
また、自動列車制御装置(ATC/TD装置)では、在線する各列車に無線機を搭載し、先行列車および後続列車と無線通信を行って自列車の位置を相対的に把握することにより、位置ずれが補正される。
【0039】
さらに、車両5に全地球測位システム(GPS:Global Positioning System)のGPS受信機など、パッシブな位置情報受信機を列車に搭載することにより、位置ずれを補正することも行われている。
【0040】
しかし、上述した従来の位置ずれ補正技術には、下記の点で新たな問題が生じることとなる。まず、地上装置からの絶対位置情報に基づいて位置ずれを補正する構成では、位置精度が地上装置の設置数に左右されるため、位置精度を高める必要が生じた場合、地上装置の設置数を増やす必要があり、コスト高を招く。特に、この種の地上装置は、軌道の全長に渡って、その閉そく区間毎に設置されるから、その設置数に比例して莫大な費用負担を強いられることとなる。
【0041】
また、自動列車制御装置(ATC/TD装置)では、在線する各列車に無線機を搭載しなければならないから、コスト高を招く。同様の問題は、列車にGPS受信機を搭載する構成でも生じる。しかも、GPS電波は、地理的条件によっては受信できない。その結果、列車が、例えばトンネル内や駅校舎内、高層ビル群の間や山間部などを走行している間は、GPS電波を受信できず、その結果、前記位置ずれを補正することができないこととなる。
【0042】
これに対し、本発明は、上述した従来技術の不具合を全て解決し、走行中の列車の現在位置を、低コストで、しかも連続的かつ高精度に算出しうる車上装置、及び、列車の自列車位置認識方法を提供するものである。すなわち、図1及び図2を参照して説明したように、車上装置1は、非接触式センサ20から入力される地物検知信号s2に基づいて走行中の列車の現在位置を常時認識する。ここで、検知対象物たる地物は、在線する軌道付近にもともと存在する枕木61やレール62、繋ぎ目64や碍子65などから適宜選択される。上述したように、車上装置1では、在線する軌道付近にもともと存在する地物(61〜66)を利用し、速度信号s1から把握される自列車の現在位置と、実際の列車の現在位置との間で位置ずれを解消するため地上側に新たな設備を設置する必要はないから、走行中の列車の現在位置を、低コストで把握しうる車上装置1、及び、自列車位置認識方法を提供することができる。
【0043】
上述した地物(61〜66)は、もともと軌道に沿って連続的に設置されている。しかも鉄道は、特定の軌道のみを走行するものであるから、在線する軌道において地物(61〜66)の種類、設置位置、及び、設置間隔は、固定的であり、変化することがないから、走行中の列車の現在位置を、連続的かつ高精度に把握しうる車上装置1、及び、車両5の自列車位置認識方法を提供することができる。
【0044】
以上、好ましい実施例を参照して本発明の内容を具体的に説明したが、本発明の基本的技術思想及び教示に基づいて、当業者であれば、種種の変形態様を採り得ることは自明である。例えば、本発明に係る車上装置1は、路面電車やモノレール、新交通システムなどにおいても適用することができる。
【0045】
また、図1及び図2の非接触式センサ20は、常時作動させる必要はなく、走行検知不能となる極低速領域の走行時や悪天候下での走行時に、補助的に作動させてもよい。
【0046】
さらに、本発明の特徴は、特定の地物(61〜66)に、車上の非接触式センサ20から電磁波を当て、その地物からの反射波に基づいて生成される地物検知信号s2をデータベースと照合することにより、車両5の現在位置を求める点に特徴がある。図1及び図2は、上述した観点から必要最小数の非接触式センサ20を示すものであって、例えば非接触式センサ20の設置数を増やし、それによって位置精度を向上しうることは明白である。
【0047】
加えて、上述した本発明の技術思想からすれば、ターゲットとなる地物を同時に複数設定することもできる。例えば、一つの車両5において、その屋根部分に碍子65をターゲットとする非接触式センサ20を設け、同車体側面に支柱66をターゲットとする非接触式センサ20を設け、同車体底面に枕木61をターゲットとする非接触式センサ20を設けてもよい。この構成によると、位置精度を向上することができるとともに、いずれかの非接触式センサ20が故障した場合であっても、他の非接触式センサ20からの地物検知信号s2(s2)をデータベースに照合して自列車の現在位置を把握し、車両5の実際の走行距離と、速度信号s1から算出された走行距離との間の位置ずれを補正することができる。
【符号の説明】
【0048】
1 車上装置
10 車軸回転検出器
20 非接触式センサ
30 データベース
s2 地物検知信号
【特許請求の範囲】
【請求項1】
非接触式センサと、地物情報のデータベースとを有し、前記センサから供給される地物検知信号を、前記地物情報と照合して自列車位置を認識する、車上装置
【請求項2】
請求項1に記載された車上装置であって、前記センサは、車両上に配置され、特定の地物に対して電磁波を放射し、前記地物から反射した前記電磁波を受信し、受信結果に基づいて地物検知信号を供給する、
車上装置
【請求項3】
請求項1又は2に記載された車上装置であって、
前記地物情報は、特定の地物の設置位置、特定の地物の設置間隔、又は、特定の地物の設置数の何れかを含む、
車上装置。
【請求項4】
請求項1乃至3の何れかに記載された車上装置であって、さらに車軸回転検出器を含み、前記車軸回転検出器から入力される速度信号に基づいて車両の移動距離を算出する、
車上装置。
【請求項5】
非接触式センサによって、特定の地物を検出して地物検知信号を供給し、
前記地物検知信号と、車上データベースの地物情報とを照合して自列車位置を認識する、自列車位置認識方法。
【請求項1】
非接触式センサと、地物情報のデータベースとを有し、前記センサから供給される地物検知信号を、前記地物情報と照合して自列車位置を認識する、車上装置
【請求項2】
請求項1に記載された車上装置であって、前記センサは、車両上に配置され、特定の地物に対して電磁波を放射し、前記地物から反射した前記電磁波を受信し、受信結果に基づいて地物検知信号を供給する、
車上装置
【請求項3】
請求項1又は2に記載された車上装置であって、
前記地物情報は、特定の地物の設置位置、特定の地物の設置間隔、又は、特定の地物の設置数の何れかを含む、
車上装置。
【請求項4】
請求項1乃至3の何れかに記載された車上装置であって、さらに車軸回転検出器を含み、前記車軸回転検出器から入力される速度信号に基づいて車両の移動距離を算出する、
車上装置。
【請求項5】
非接触式センサによって、特定の地物を検出して地物検知信号を供給し、
前記地物検知信号と、車上データベースの地物情報とを照合して自列車位置を認識する、自列車位置認識方法。
【図1】


【図2】
【図2】
【公開番号】特開2013−107434(P2013−107434A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−252506(P2011−252506)
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]