
車両ずり下がり状態判定装置およびそれを備えた車両制御装置

【課題】的確に車両のずり下がり状態を判定することができる車両ずり下がり状態判定装置を提供する。
【解決手段】車両が登坂方向に走行している登坂走行状態において、登坂方向の駆動力が発生しない無駆動力状態とされ、かつ、車輪加速度dVw(つまり車両加速度)が加速方向となったときに、車両ずり下がり状態と判定する。これにより、車両の積載重量の影響を受けることなく、正確に車両ずり下がり状態を判定することが可能となる。そして、このような正確な車両ずり下がり状態の判定結果に基づいて、アイドルストップ制御ではエンジン再始動を行い、坂路保持制御ではブレーキ力を増加させることで、車両ずり下がりを抑制することが可能となる。
【解決手段】車両が登坂方向に走行している登坂走行状態において、登坂方向の駆動力が発生しない無駆動力状態とされ、かつ、車輪加速度dVw(つまり車両加速度)が加速方向となったときに、車両ずり下がり状態と判定する。これにより、車両の積載重量の影響を受けることなく、正確に車両ずり下がり状態を判定することが可能となる。そして、このような正確な車両ずり下がり状態の判定結果に基づいて、アイドルストップ制御ではエンジン再始動を行い、坂路保持制御ではブレーキ力を増加させることで、車両ずり下がりを抑制することが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、登坂路において路面勾配により車両が下方に移動するという車両ずり下がり状態を判定する車両ずり下がり状態判定装置およびそれを備えた車両制御装置に関するものである。
【背景技術】
【0002】
従来、特許文献1において、燃料の消費量低減などを目的として、所定条件を満たした場合にアイドリングストップを行うエンジンアイドルストップ制御装置が提案されている。この装置では、ブレーキ制動力が勾配後退力以下になると車両ずり下がり状態と判定し、エンジンを再始動して車両のずり下がりを抑制している。
【0003】
また、特許文献2にも、車両のずり下がりを抑制することができるブレーキ力保持装置が提案されている。この装置では、車両の静止後に車輪速度パルスが入力されたことで、ずり下がりを検出し、エンジンを始動して車両のずり下がりを抑制している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−215139号公報
【特許文献2】特開2000−351340号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に示される装置のようにブレーキ制動力と勾配後退力との関係に基づいて車両ずり下がり状態を判定するものでは、車両の静止状態を保持するためのブレーキ制動力が車両の積載重量などで変化するため、正確にずり下がりを判定できない可能性がある。このため、的確に車両のずり下がりを抑制できなくなるおそれがある。
【0006】
また、特許文献2に示される装置のように車輪速度パルスを用いるものでは、走行しながら登坂路を上っている状態からずり下がりに転じるような場合、車輪速度パルスが間隔を変化させながら連続して入力されるため、車両の静止を検出できず、車両のずり下がりを抑制できなくなるおそれがある。
【0007】
本発明は上記点に鑑みて、的確に車両のずり下がり状態を判定することができる車両ずり下がり状態判定装置およびそれを備えた車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、請求項1に記載の発明では、車速検出手段(11、100)が検出した車速の変化から車両の前後方向の加速度である前後加速度を演算することで、間接前後加速度演算手段(11、100)にて間接的に前後加速度を演算し、車両ずり下がり状態判定手段(13a、140)は、登坂走行判定手段(12、110)にて登坂走行状態であると判定され、かつ、駆動状態判定手段(13、130)にて車両の駆動力が発生していない無駆動力状態であると判定されたときに、間接前後加速度演算手段(11、100)で演算された間接的な前後加速度が加速方向となったことを検出し、車両ずり下がり状態であることを判定することを特徴としている。
【0009】
このように、車両が登坂方向に走行している登坂走行状態において、登坂方向の駆動力が発生しない無駆動力状態とされ、かつ、前後加速度が加速方向となったときに、車両ずり下がり状態と判定している。これにより、車両の積載重量の影響を受けることなく、正確に車両ずり下がり状態を判定することが可能となる。
【0010】
請求項2に記載の発明では、駆動状態判定手段は、エンジンの停止、クラッチの非接続、ギアがニュートラル位置のうちの少なくとも1つが検出されたことをもって、無駆動力状態と判定することを特徴としている。
【0011】
このように、駆動状態判定手段では、エンジンの停止、クラッチの非接続、ギアがニュートラル位置のうちの少なくとも1つが検出されると、無駆動力状態であると判定することができる。
【0012】
請求項3に記載の発明では、車両ずり下がり状態判定手段(13a、140)は、間接前後加速度演算手段(11、100)が演算した間接的な前後加速度が加速方向となったときに、直接前後加速度検出手段(12、100)で検出された重力加速度を含む前後加速度の極性が変化した際には、車両ずり下がりと判定しないことを特徴としている。
【0013】
このように、直接検出された重力加速度を含む前後加速度の極性が変化した場合には、登坂路を走行中にブレーキが踏み込まれて減速しているような状況において、途中から降坂路に変化した場合と想定される。このため、間接的な前後加速度が加速方向となったときに、直接検出された重力加速度を含む前後加速度の極性が変化した際には、車両ずり下がりと判定しないようにすることで、誤って車両ずり下がり状態と判定してしまうことを防止することができる。
【0014】
請求項4に記載の発明では、請求項1ないし3のいずれか1つに記載の車両ずり下がり状態判定装置を備え、該車両ずり下がり状態判定装置での判定結果に基づいて車両制御を行う車両制御装置において、車両制御として車両を停止させる際にエンジン(7)を自動的に停止させる共に車両を発進させる際にエンジン(7)を自動的に再始動させるアイドルストップ制御を実行し、アイドルストップ制御中に車両ずり下がり状態判定装置にて車両ずり下がり状態と判定されると、エンジン(7)を始動させるエンジン始動手段(150)を備えていることを特徴としている。
【0015】
上記のような正確に車両ずり下がり状態を判定できる車両ずり下がり状態判定装置での判定結果に基づいて、アイドルストップ制御でエンジン再始動を行うことで、的確に車両ずり下がりを抑制することが可能となる。
【0016】
請求項5に記載の発明では、車両ずり下がり状態判定装置にて車両ずり下がり状態と判定されると、車両制御として車両の制動力を増加させる制御を実行する制動力増加手段(150)を備えていることを特徴としている。
【0017】
このように、上記のような正確に車両ずり下がり状態を判定できる車両ずり下がり状態判定装置での判定結果に基づいて、坂路保持制御でブレーキ力を増加させることでも、車両ずり下がりを抑制することが可能となる。
【0018】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0019】
【図1】本発明の第1実施形態にかかる車両ずり下がり状態判定装置を適用した車両制御システムのブロック構成を示した図である。
【図2】車両ずり下がり状態判定処理の詳細を示したフローチャートである。
【図3】アイドルストップ制御中に車両ずり下がり状態判定処理を実行したときのタイミングチャートである。
【図4】登坂路から降坂路に変化した場合の車両加速度の関係を表した図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0021】
(第1実施形態)
本発明の第1実施形態について説明する。本実施形態では、アイドルストップ制御や坂路保持制御などの車両制御が実行される車両制御システムに対して車両ずり下がり状態判定装置を適用した場合について説明する。
【0022】
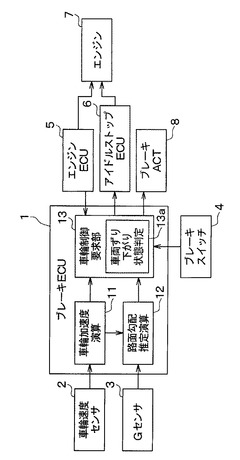
図1は、本実施形態にかかる車両ずり下がり状態判定装置を適用した車両制御システムのブロック構成を示した図である。この図を参照して車両制御システムの構成について説明する。
【0023】
図1に示すように、車両制御システムは、ブレーキECU(電子制御装置)1によって車両ずり下がり状態判定を行い、この車両ずり下がり状態判定の結果に基づいて車両におけるエンジン制御やブレーキ制御等の車両制御を実行する。なお、ブレーキECU1では、アンチスキッド制御などの一般的なブレーキ制御についても実行しているが、ここでは本発明の特徴にかかわる車両ずり下がり状態判定やそれに関わる車両制御についてのみ説明する。
【0024】
ブレーキECU1には、車輪速度センサ2や前後加速度センサ(以下、Gセンサという)3の検出信号が入力されると共に、ブレーキスイッチ(BRK)4のスイッチ信号およびエンジンECU5からの情報が入力され、これらの入力に基づいて車両ずり下がり状態判定を行っている。
【0025】
具体的には、ブレーキECU1は、車輪加速度演算部11、路面勾配推定演算部12および車両制御要求部13を有した構成とされ、車両制御要求部13に備えられた車両ずり下がり状態判定部13aにて車両ずり下がり状態判定を実行する。なお、本実施形態では、これらのブレーキECU1の各部11〜13によって車両ずり下がり状態判定を実行しており、これら各部11〜13が車両ずり下がり状態判定装置を構成している。ここではブレーキECU1で車両ずり下がり状態判定を行った場合を例に挙げたが、他のECUなどで車両ずり下がり状態判定を実行しても構わない。
【0026】
車輪加速度演算部11は、車輪速度センサ2から入力される検出信号に基づいて車輪加速度を演算する。車輪速度センサ2からは、車輪の回転に応じて出力されるパルス信号が検出信号としてブレーキECU1に入力されるため、車輪加速度演算部11は、このパルス信号のパルス数に基づいて各車輪の車輪速度Vwを演算すると共に、その車輪速度Vwの変化量(微分値)を求めることで車輪加速度dVwを演算する。なお、このとき演算しているのは車輪速度Vwや車輪加速度dVwであるが、本実施形態で想定している車両のずり下がりは車速がゼロに近い低速での車両の移動であるため、車輪速度Vwは車速と等しくなり、車輪加速度dVwは車両加速度と等しくなる。このため、このとき演算している車輪速度Vwや車輪加速度dVwは、実質的に車速や車両加速度を演算していることを意味している。
【0027】
なお、本実施形態の車輪加速度dVwは、前進方向、後退方向のいずれも、速度の増加を正の値とし、速度の減少を負の値として演算されるものとする。
【0028】
路面勾配推定演算部12は、Gセンサ3から入力される検出信号と車輪加速度演算部11で演算した車輪加速度dVwに基づいて路面勾配推定を行う。すなわち、Gセンサ3で検出される車両の前後方向の加速度である前後加速度Gは、車両加速度に路面勾配に応じた重力加速度が加えられた出力となることから、Gセンサ3の検出信号から前後加速度Gを演算し、この前後加速度Gから車両加速度を差し引けば、路面勾配に応じた重力加速度が得られる。車両加速度については、車輪加速度演算部11で演算した車輪加速度dVwと等しいことから、前後加速度Gから車輪加速度dVwを差し引くことで路面勾配に応じた重力加速度を演算することができる。そして、この路面勾配に応じた重力加速度に基づいて、路面勾配を推定することができる。なお、ここでは路面勾配推定の手法の一例を挙げたが、周知となっているどのような手法によって路面勾配推定演算を行っても良い。例えば、ナビゲーション装置の地図データとして路面勾配に関するデータが含まれているものであれば、そのデータを用いて路面勾配を求めても良い。
【0029】
車両制御要求部13は、車両ずり下がり状態判定部13aにて車両ずり下がり状態判定を行うと共に、車両ずり下がり状態判定の結果に基づいて車両におけるエンジン制御やブレーキ制御等の車両制御を実行する。車両ずり下がり状態判定部13aでは、エンジンECU5で取り扱われているエンジンの稼動状況に関する情報やブレーキスイッチ4からのブレーキペダルが踏み込まれていることを示すスイッチ信号に基づいて車両ずり下がり状態判定を行っている。この車両ずり下がり状態判定の手法については、後で詳細に説明するが、この車両ずり下がり状態判定によって車両ずり下がりと判定されると、それに基づいて車両制御要求部13がアイドルストップ制御によるエンジン再始動や坂路保持制御による制動力増加を行わせる。例えば、車両ずり下がりと判定されると、アイドルストップECU6に対してエンジン始動の要求信号を出力して停止中のエンジン7を再始動させることで、クリープトルクを発生させ、車両のずり下がりを抑制する。または、車両ずり下がりと判定されると、ブレーキアクチュエータ(ACT)8に対して制動力を増加させる要求信号を出力する。これにより、車両に対して制動力を加えることで車両のずり下がりを抑制する。
【0030】
なお、エンジンECU5は、アクセルペダルの操作量に応じてスロットルバルブの開度を調整することで所望のエンジンパワーを得るなどの一般的なエンジン制御を実行しており、エンジンの稼動状態について把握している。このエンジンの稼動状態を示す情報がエンジンECU5から車両制御要求部13に入力されるようにしている。また、アイドルストップECU6は、例えば車速が所定の閾速度以下のときにブレーキ踏込みが為されていると判定したときには車両を静止させる予定であると想定してエンジン7を停止させ、アクセルペダルが踏み込まれた時には車両を発進させる予定であると想定してエンジン7を再始動させるというアイドルストップ制御を実行している。このため、車両ずり下がり状態判定にて車両ずり下がり状態と判定されたときには、車両制御要求部13からアイドルストップECU5に対してエンジン始動を要求することでエンジン7を再始動させるようにしている。
【0031】
このように、本実施形態にかかる車両ずり下がり状態判定装置が適用された車両制御システムが構成されている。続いて、このように構成された車両制御システムに備えられたブレーキECU1が実行する車両ずり下がり状態判定処理について説明する。
【0032】
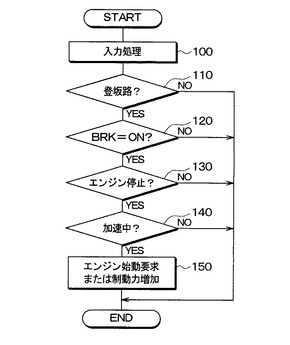
図2は、車両ずり下がり状態判定処理の詳細を示したフローチャートである。この図に示す車両ずり下がり状態判定処理は、アイドルストップ制御や坂路保持制御が実行された際に所定の制御周期毎に実行される。
【0033】
まず、ステップ100では、入力処理を行う。この処理は、ブレーキECU1における車輪加速度演算部11や路面勾配推定演算部12にて実行される。具体的には、車輪速度センサ2やGセンサ3から検出信号を入力すると共に、エンジンECU5からのエンジン7の停止に関する情報やブレーキスイッチ4からのスイッチ信号を入力する。また、入力した車輪速度センサ2の検出信号から車輪速度Vwを演算すると共に演算した車輪速度Vwを微分すること(もしくは前回の制御周期の際に演算した車輪速度Vwとの差を求めること)によって車輪加速度dVwを演算する。さらに、入力したGセンサ3の検出信号に基づいて前後加速度Gを演算すると共に、演算した前後加速度Gと車輪加速度dVwとの差に基づいて路面勾配の推定演算を行う。
【0034】
次に、ステップ110以降に進み、車両ずり下がり状態判定を行う。この処理は、車両ずり下がり状態判定部13aにて実行される。すなわち、ステップ110では、登坂路であるか否かを判定する。この判定は、ステップ100で推定演算を行うことによって求めた路面勾配に基づいて為され、車両が登坂方向に走行している登坂走行状態であれば登坂路であると判定する。そして、登坂路であれば車両ずり下がり状態となる可能性があることからステップ120に進み、登坂路でなければ車両ずり下がり状態となる可能性がないためそのまま処理を終了する。
【0035】
ステップ120では、ブレーキスイッチ4がオンしているか否かを判定する。この判定は、ブレーキスイッチ4から入力されたスイッチ信号に基づいて為される。アイドルストップ制御や坂路保持制御では、ブレーキペダルの踏み込みが行われていることが条件とされていることから、確認のために本判定を行っている。ただし、車両ずり下がり状態判定処理は、アイドルストップ制御や坂路保持制御が実行された際に実行されるようになっていることから、本処理については省略しても構わない。ここで肯定判定されればステップ130に進む。また、否定判定されれば、車両ずり下がり状態判定を行う必要がないことから、そのまま処理を終了する。
【0036】
ステップ130では、エンジン停止中であるか否かを判定する。エンジン停止中には、登坂方向への駆動力が発生していない無駆動力状態であり、車両ずり下がり状態になり得る。このため、エンジン停止中であれば、ステップ140に進んで加速中であるか否かを判定する。これらの判定は、ステップ100で入力したエンジンECU5から伝えられる情報とステップ100で演算した車輪加速度dVwに基づいて為される。
【0037】
加速中であるか否かについては、車輪加速度dVwの絶対値が増加しているか否かに基づいて判定している。つまり、登坂路において、車両を停止していくときには車速が減速されていくことになるため、車輪加速度dVw(すなわち車両加速度)は負の値として現れる。そして、車両を停止していくときに速度が徐々に低下して最終的に停止時に0となり、車輪加速度dVwも0となる。車両のずり下がりが発生すると速度が徐々に増加し車輪加速度dVwは正の値として現れる。換言すれば、登坂路で車両が走行状態から停止してずり下がり状態になる過程において、登坂方向(前進方向)を正とする車速が徐々に減少したのち、反登坂方向(後退方向)を正とする車速が徐々に増加することになるため、車輪加速度dVwは減速方向から加速方向に変化することになる。このため、車輪加速度dVwが正の値となった場合に加速中と判定している。あるいは、車輪加速度dVwが負の値(減速)から正の値(加速)に変化した場合に、加速中と判定しても良い。
【0038】
登坂路において、エンジン停止状態で車両が加速するのは、車両がずり下がり状態になったときにのみ発生する状況である。つまり、エンジン停止状態は無駆動力状態であり駆動力が発生しないため、車両前方への推進力が発生せず、このような状態において車両が加速するのは重力による車両のずり下がりである。このため、ステップ130、140で車両ずり下がり状態になる条件を満たしているか否かを判定し、その条件を満たしていればステップ150に進み、満たしていなければ車両ずり下がり状態ではないためそのまま処理を終了する。
【0039】
そして、ステップ150では、車両ずり下がり状態を抑制するために、アイドルストップ制御中に実行された車両ずり下がり状態判定処理であればエンジン始動要求を出力し、坂路保持制御中に実行された車両ずり下がり状態判定処理であれば制動力を増加させる出力を行い処理を終了する。
【0040】
これにより、エンジン始動要求が出力された場合には、アイドルストップECU6がエンジン始動要求の出力を受けてエンジン7を再始動させ、制動力を増加させる出力が出された場合には、ブレーキアクチュエータ8を駆動して制動力を増加させる。例えば、液圧によってホイールシリンダを自動加圧するシステムではモータを駆動して加圧用のポンプによる吸入吐出を行うと共に、各種制御弁をホイールシリンダを加圧できる弁位置に設定し、ポンプが吐出したブレーキ液によってホイールシリンダを加圧して制動力を増加させる。このように、エンジン再始動によって発生するクリープトルクにより車両のずり下がりを抑制したり、車両に対して制動力を加えることで車両のずり下がりを抑制することが可能となる。
【0041】
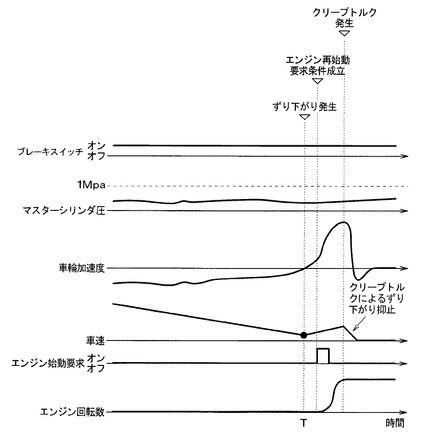
図3は、アイドルストップ制御中に車両ずり下がり状態判定処理を実行したときのタイミングチャートである。
【0042】
車両走行中にブレーキペダルが踏み込まれ、車速が所定の閾速度以下になるとアイドルストップ制御が実行される。この場合、図3に示すように、ブレーキスイッチ4がオンでブレーキペダルが踏まれた状態でマスタシリンダ圧が発生している状態において、エンジン7が停止してエンジン回転数が0となり、車速が徐々に低下していく。また、車輪加速度dVwとして負の値が生じる。つまり、車輪加速度dVwの絶対値|dVw|は徐々に低下していく。
【0043】
そして、時点Tにおいて、車両ずり下がり状態になると、車輪加速度dVwが減速方向から加速方向に変化し、車両ずり下がり状態になると同時に増加し正の値となる。このため、登坂路において、ブレーキスイッチ4がオンのときにエンジン停止していて、かつ、加速中という状況になるため、車両ずり下がり状態と判定され、エンジン始動要求が出される。これにより、エンジン7が再始動され、クリープトルクが発生して、車両のずり下がりが抑制される。
【0044】
なお、図3中では、車両ずり下がり状態になる直前に車速が0になっていないが、これは車輪速度センサ2のパルス信号では正確に車速が0になったことを検出できないためである。また、車両ずり下がり状態になったときに車速が正の値として増加しているが、これは車両が後退方向に進んでいる場合にも車速を正の値として表しているためである。
【0045】
以上説明したように、本実施形態では、車両が登坂方向に走行している登坂走行状態において、登坂方向の駆動力が発生しない無駆動力状態とされ、かつ、車輪加速度dVw(つまり車両加速度)が正の値となったときに車両ずり下がり状態と判定している。(あるいは減速方向から加速方向に変化したときに、車両ずり下がり状態と判定しても良い。)これにより、車両の積載重量の影響を受けることなく、正確に車両ずり下がり状態を判定することが可能となる。
【0046】
そして、このような正確な車両ずり下がり状態の判定結果に基づいて、アイドルストップ制御ではエンジン再始動を行い、坂路保持制御ではブレーキ力を増加させることで、車両ずり下がりを抑制することが可能となる。
【0047】
(他の実施形態)
上記実施形態では、アイドルストップ制御や坂路保持制御中に車両ずり下がり状態判定を行う場合について説明したが、この他の状況においても車両ずり下がり状態判定を行うことができる。すなわち、車両に登坂方向の駆動力が発生していない無駆動力状態において、車両加速度が減速方向から加速方向に変化するような状況は車両ずり下がり状態であることから、無駆動力状態となるような状況下において、車両ずり下がり状態判定を行うことができる。例えば、クラッチが非接続のときやギアがニュートラル(N)位置とされている場合に車両ずり下がり状態判定を行うことができる。
【0048】
また、上記実施形態において、車両加速度dVw(つまり車両加速度)が減速方向から加速方向に変化したときに、Gセンサ3の検出信号から求められる前後加速度の極性が変化したときには、車両ずり下がり状態と判定しないようにすると好ましい。この理由について、図4を参照して説明する。
【0049】
図4は、登坂路から降坂路に変化した場合の車両加速度の関係を表した図である。まず、図中の状態(1)ように、車両が紙面右方向から登坂路を走行中にブレーキが踏み込まれて減速しているような状況において、図中の状態(2)のように降坂路に変化した場合を想定してみる。
【0050】
このような場合には、ブレーキが掛かっているため車輪加速度dVwが減速度として現れ、車両の停止に近づくほど減速度が減少していくが、状態(1)から状態(2)に変化した後、降坂路の影響で車輪加速度dVwが増加することがある。このような状況は、図2に示したステップ100〜130の条件を満たして車両ずり下がり状態と判定される可能性がある。
【0051】
この場合において、状態(1)のときには、車両は登坂方向に走行している登坂走行状態であり、ブレーキにより生じる車両加速度と重力により生じる車両加速度は共に負の方向(進行方向と反対方向)となる。また、状態(2)のときには、車両は降坂方向に走行している降坂走行状態であり、ブレーキにより生じる車両加速度は負の方向(進行方向と反対方向)となり、重力により生じる車両加速度は正の方向(進行方向と同方向)となる。したがって、状態(1)から状態(2)に変化する際に、Gセンサ3の検出信号に基づいて求められる前後加速度の極性は負から正に変わることになる。
【0052】
このため、Gセンサ3の検出信号に基づいて求められる前後加速度、つまり前後加速度を車輪速度や車速等から演算するのではなく直接検出し、その前後加速度の極性が変化した場合には、上記のような状態(1)から状態(2)に変化した場合であると想定して、車両ずり下がり状態と判定しないようにすると好ましい。これにより、状態(1)から状態(2)に変化した場合に、誤って車両ずり下がり状態と判定してしまうことを防止することができる。
【0053】
なお、図1中のブレーキECU1の各部11〜13や図2中に示したステップは、各種処理を実行する手段に対応するものである。具体的には、ブレーキECU1のうち車輪加速度演算部11やステップ100の処理を行っている部分が車速検出手段や間接前後加速度演算手段、路面勾配推定演算部12やステップ110の処理を行っている部分が登坂走行判定手段、車輪制御要求部13やステップ130の処理を行っている部分が駆動状態判定手段、車両ずり下がり状態判定部13aやステップ140の処理を行っている部分が車両ずり下がり状態判定手段に相当する。
【符号の説明】
【0054】
1…ブレーキECU、2…車輪速度センサ、3…Gセンサ、4…ブレーキスイッチ、5…エンジンECU、6…アイドルストップECU、7…エンジン、11…車輪加速度演算部、12…路面勾配推定演算部、13…車両制御要求部、13a…車両ずり下がり状態判定部
【技術分野】
【0001】
本発明は、登坂路において路面勾配により車両が下方に移動するという車両ずり下がり状態を判定する車両ずり下がり状態判定装置およびそれを備えた車両制御装置に関するものである。
【背景技術】
【0002】
従来、特許文献1において、燃料の消費量低減などを目的として、所定条件を満たした場合にアイドリングストップを行うエンジンアイドルストップ制御装置が提案されている。この装置では、ブレーキ制動力が勾配後退力以下になると車両ずり下がり状態と判定し、エンジンを再始動して車両のずり下がりを抑制している。
【0003】
また、特許文献2にも、車両のずり下がりを抑制することができるブレーキ力保持装置が提案されている。この装置では、車両の静止後に車輪速度パルスが入力されたことで、ずり下がりを検出し、エンジンを始動して車両のずり下がりを抑制している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−215139号公報
【特許文献2】特開2000−351340号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に示される装置のようにブレーキ制動力と勾配後退力との関係に基づいて車両ずり下がり状態を判定するものでは、車両の静止状態を保持するためのブレーキ制動力が車両の積載重量などで変化するため、正確にずり下がりを判定できない可能性がある。このため、的確に車両のずり下がりを抑制できなくなるおそれがある。
【0006】
また、特許文献2に示される装置のように車輪速度パルスを用いるものでは、走行しながら登坂路を上っている状態からずり下がりに転じるような場合、車輪速度パルスが間隔を変化させながら連続して入力されるため、車両の静止を検出できず、車両のずり下がりを抑制できなくなるおそれがある。
【0007】
本発明は上記点に鑑みて、的確に車両のずり下がり状態を判定することができる車両ずり下がり状態判定装置およびそれを備えた車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、請求項1に記載の発明では、車速検出手段(11、100)が検出した車速の変化から車両の前後方向の加速度である前後加速度を演算することで、間接前後加速度演算手段(11、100)にて間接的に前後加速度を演算し、車両ずり下がり状態判定手段(13a、140)は、登坂走行判定手段(12、110)にて登坂走行状態であると判定され、かつ、駆動状態判定手段(13、130)にて車両の駆動力が発生していない無駆動力状態であると判定されたときに、間接前後加速度演算手段(11、100)で演算された間接的な前後加速度が加速方向となったことを検出し、車両ずり下がり状態であることを判定することを特徴としている。
【0009】
このように、車両が登坂方向に走行している登坂走行状態において、登坂方向の駆動力が発生しない無駆動力状態とされ、かつ、前後加速度が加速方向となったときに、車両ずり下がり状態と判定している。これにより、車両の積載重量の影響を受けることなく、正確に車両ずり下がり状態を判定することが可能となる。
【0010】
請求項2に記載の発明では、駆動状態判定手段は、エンジンの停止、クラッチの非接続、ギアがニュートラル位置のうちの少なくとも1つが検出されたことをもって、無駆動力状態と判定することを特徴としている。
【0011】
このように、駆動状態判定手段では、エンジンの停止、クラッチの非接続、ギアがニュートラル位置のうちの少なくとも1つが検出されると、無駆動力状態であると判定することができる。
【0012】
請求項3に記載の発明では、車両ずり下がり状態判定手段(13a、140)は、間接前後加速度演算手段(11、100)が演算した間接的な前後加速度が加速方向となったときに、直接前後加速度検出手段(12、100)で検出された重力加速度を含む前後加速度の極性が変化した際には、車両ずり下がりと判定しないことを特徴としている。
【0013】
このように、直接検出された重力加速度を含む前後加速度の極性が変化した場合には、登坂路を走行中にブレーキが踏み込まれて減速しているような状況において、途中から降坂路に変化した場合と想定される。このため、間接的な前後加速度が加速方向となったときに、直接検出された重力加速度を含む前後加速度の極性が変化した際には、車両ずり下がりと判定しないようにすることで、誤って車両ずり下がり状態と判定してしまうことを防止することができる。
【0014】
請求項4に記載の発明では、請求項1ないし3のいずれか1つに記載の車両ずり下がり状態判定装置を備え、該車両ずり下がり状態判定装置での判定結果に基づいて車両制御を行う車両制御装置において、車両制御として車両を停止させる際にエンジン(7)を自動的に停止させる共に車両を発進させる際にエンジン(7)を自動的に再始動させるアイドルストップ制御を実行し、アイドルストップ制御中に車両ずり下がり状態判定装置にて車両ずり下がり状態と判定されると、エンジン(7)を始動させるエンジン始動手段(150)を備えていることを特徴としている。
【0015】
上記のような正確に車両ずり下がり状態を判定できる車両ずり下がり状態判定装置での判定結果に基づいて、アイドルストップ制御でエンジン再始動を行うことで、的確に車両ずり下がりを抑制することが可能となる。
【0016】
請求項5に記載の発明では、車両ずり下がり状態判定装置にて車両ずり下がり状態と判定されると、車両制御として車両の制動力を増加させる制御を実行する制動力増加手段(150)を備えていることを特徴としている。
【0017】
このように、上記のような正確に車両ずり下がり状態を判定できる車両ずり下がり状態判定装置での判定結果に基づいて、坂路保持制御でブレーキ力を増加させることでも、車両ずり下がりを抑制することが可能となる。
【0018】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0019】
【図1】本発明の第1実施形態にかかる車両ずり下がり状態判定装置を適用した車両制御システムのブロック構成を示した図である。
【図2】車両ずり下がり状態判定処理の詳細を示したフローチャートである。
【図3】アイドルストップ制御中に車両ずり下がり状態判定処理を実行したときのタイミングチャートである。
【図4】登坂路から降坂路に変化した場合の車両加速度の関係を表した図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0021】
(第1実施形態)
本発明の第1実施形態について説明する。本実施形態では、アイドルストップ制御や坂路保持制御などの車両制御が実行される車両制御システムに対して車両ずり下がり状態判定装置を適用した場合について説明する。
【0022】
図1は、本実施形態にかかる車両ずり下がり状態判定装置を適用した車両制御システムのブロック構成を示した図である。この図を参照して車両制御システムの構成について説明する。
【0023】
図1に示すように、車両制御システムは、ブレーキECU(電子制御装置)1によって車両ずり下がり状態判定を行い、この車両ずり下がり状態判定の結果に基づいて車両におけるエンジン制御やブレーキ制御等の車両制御を実行する。なお、ブレーキECU1では、アンチスキッド制御などの一般的なブレーキ制御についても実行しているが、ここでは本発明の特徴にかかわる車両ずり下がり状態判定やそれに関わる車両制御についてのみ説明する。
【0024】
ブレーキECU1には、車輪速度センサ2や前後加速度センサ(以下、Gセンサという)3の検出信号が入力されると共に、ブレーキスイッチ(BRK)4のスイッチ信号およびエンジンECU5からの情報が入力され、これらの入力に基づいて車両ずり下がり状態判定を行っている。
【0025】
具体的には、ブレーキECU1は、車輪加速度演算部11、路面勾配推定演算部12および車両制御要求部13を有した構成とされ、車両制御要求部13に備えられた車両ずり下がり状態判定部13aにて車両ずり下がり状態判定を実行する。なお、本実施形態では、これらのブレーキECU1の各部11〜13によって車両ずり下がり状態判定を実行しており、これら各部11〜13が車両ずり下がり状態判定装置を構成している。ここではブレーキECU1で車両ずり下がり状態判定を行った場合を例に挙げたが、他のECUなどで車両ずり下がり状態判定を実行しても構わない。
【0026】
車輪加速度演算部11は、車輪速度センサ2から入力される検出信号に基づいて車輪加速度を演算する。車輪速度センサ2からは、車輪の回転に応じて出力されるパルス信号が検出信号としてブレーキECU1に入力されるため、車輪加速度演算部11は、このパルス信号のパルス数に基づいて各車輪の車輪速度Vwを演算すると共に、その車輪速度Vwの変化量(微分値)を求めることで車輪加速度dVwを演算する。なお、このとき演算しているのは車輪速度Vwや車輪加速度dVwであるが、本実施形態で想定している車両のずり下がりは車速がゼロに近い低速での車両の移動であるため、車輪速度Vwは車速と等しくなり、車輪加速度dVwは車両加速度と等しくなる。このため、このとき演算している車輪速度Vwや車輪加速度dVwは、実質的に車速や車両加速度を演算していることを意味している。
【0027】
なお、本実施形態の車輪加速度dVwは、前進方向、後退方向のいずれも、速度の増加を正の値とし、速度の減少を負の値として演算されるものとする。
【0028】
路面勾配推定演算部12は、Gセンサ3から入力される検出信号と車輪加速度演算部11で演算した車輪加速度dVwに基づいて路面勾配推定を行う。すなわち、Gセンサ3で検出される車両の前後方向の加速度である前後加速度Gは、車両加速度に路面勾配に応じた重力加速度が加えられた出力となることから、Gセンサ3の検出信号から前後加速度Gを演算し、この前後加速度Gから車両加速度を差し引けば、路面勾配に応じた重力加速度が得られる。車両加速度については、車輪加速度演算部11で演算した車輪加速度dVwと等しいことから、前後加速度Gから車輪加速度dVwを差し引くことで路面勾配に応じた重力加速度を演算することができる。そして、この路面勾配に応じた重力加速度に基づいて、路面勾配を推定することができる。なお、ここでは路面勾配推定の手法の一例を挙げたが、周知となっているどのような手法によって路面勾配推定演算を行っても良い。例えば、ナビゲーション装置の地図データとして路面勾配に関するデータが含まれているものであれば、そのデータを用いて路面勾配を求めても良い。
【0029】
車両制御要求部13は、車両ずり下がり状態判定部13aにて車両ずり下がり状態判定を行うと共に、車両ずり下がり状態判定の結果に基づいて車両におけるエンジン制御やブレーキ制御等の車両制御を実行する。車両ずり下がり状態判定部13aでは、エンジンECU5で取り扱われているエンジンの稼動状況に関する情報やブレーキスイッチ4からのブレーキペダルが踏み込まれていることを示すスイッチ信号に基づいて車両ずり下がり状態判定を行っている。この車両ずり下がり状態判定の手法については、後で詳細に説明するが、この車両ずり下がり状態判定によって車両ずり下がりと判定されると、それに基づいて車両制御要求部13がアイドルストップ制御によるエンジン再始動や坂路保持制御による制動力増加を行わせる。例えば、車両ずり下がりと判定されると、アイドルストップECU6に対してエンジン始動の要求信号を出力して停止中のエンジン7を再始動させることで、クリープトルクを発生させ、車両のずり下がりを抑制する。または、車両ずり下がりと判定されると、ブレーキアクチュエータ(ACT)8に対して制動力を増加させる要求信号を出力する。これにより、車両に対して制動力を加えることで車両のずり下がりを抑制する。
【0030】
なお、エンジンECU5は、アクセルペダルの操作量に応じてスロットルバルブの開度を調整することで所望のエンジンパワーを得るなどの一般的なエンジン制御を実行しており、エンジンの稼動状態について把握している。このエンジンの稼動状態を示す情報がエンジンECU5から車両制御要求部13に入力されるようにしている。また、アイドルストップECU6は、例えば車速が所定の閾速度以下のときにブレーキ踏込みが為されていると判定したときには車両を静止させる予定であると想定してエンジン7を停止させ、アクセルペダルが踏み込まれた時には車両を発進させる予定であると想定してエンジン7を再始動させるというアイドルストップ制御を実行している。このため、車両ずり下がり状態判定にて車両ずり下がり状態と判定されたときには、車両制御要求部13からアイドルストップECU5に対してエンジン始動を要求することでエンジン7を再始動させるようにしている。
【0031】
このように、本実施形態にかかる車両ずり下がり状態判定装置が適用された車両制御システムが構成されている。続いて、このように構成された車両制御システムに備えられたブレーキECU1が実行する車両ずり下がり状態判定処理について説明する。
【0032】
図2は、車両ずり下がり状態判定処理の詳細を示したフローチャートである。この図に示す車両ずり下がり状態判定処理は、アイドルストップ制御や坂路保持制御が実行された際に所定の制御周期毎に実行される。
【0033】
まず、ステップ100では、入力処理を行う。この処理は、ブレーキECU1における車輪加速度演算部11や路面勾配推定演算部12にて実行される。具体的には、車輪速度センサ2やGセンサ3から検出信号を入力すると共に、エンジンECU5からのエンジン7の停止に関する情報やブレーキスイッチ4からのスイッチ信号を入力する。また、入力した車輪速度センサ2の検出信号から車輪速度Vwを演算すると共に演算した車輪速度Vwを微分すること(もしくは前回の制御周期の際に演算した車輪速度Vwとの差を求めること)によって車輪加速度dVwを演算する。さらに、入力したGセンサ3の検出信号に基づいて前後加速度Gを演算すると共に、演算した前後加速度Gと車輪加速度dVwとの差に基づいて路面勾配の推定演算を行う。
【0034】
次に、ステップ110以降に進み、車両ずり下がり状態判定を行う。この処理は、車両ずり下がり状態判定部13aにて実行される。すなわち、ステップ110では、登坂路であるか否かを判定する。この判定は、ステップ100で推定演算を行うことによって求めた路面勾配に基づいて為され、車両が登坂方向に走行している登坂走行状態であれば登坂路であると判定する。そして、登坂路であれば車両ずり下がり状態となる可能性があることからステップ120に進み、登坂路でなければ車両ずり下がり状態となる可能性がないためそのまま処理を終了する。
【0035】
ステップ120では、ブレーキスイッチ4がオンしているか否かを判定する。この判定は、ブレーキスイッチ4から入力されたスイッチ信号に基づいて為される。アイドルストップ制御や坂路保持制御では、ブレーキペダルの踏み込みが行われていることが条件とされていることから、確認のために本判定を行っている。ただし、車両ずり下がり状態判定処理は、アイドルストップ制御や坂路保持制御が実行された際に実行されるようになっていることから、本処理については省略しても構わない。ここで肯定判定されればステップ130に進む。また、否定判定されれば、車両ずり下がり状態判定を行う必要がないことから、そのまま処理を終了する。
【0036】
ステップ130では、エンジン停止中であるか否かを判定する。エンジン停止中には、登坂方向への駆動力が発生していない無駆動力状態であり、車両ずり下がり状態になり得る。このため、エンジン停止中であれば、ステップ140に進んで加速中であるか否かを判定する。これらの判定は、ステップ100で入力したエンジンECU5から伝えられる情報とステップ100で演算した車輪加速度dVwに基づいて為される。
【0037】
加速中であるか否かについては、車輪加速度dVwの絶対値が増加しているか否かに基づいて判定している。つまり、登坂路において、車両を停止していくときには車速が減速されていくことになるため、車輪加速度dVw(すなわち車両加速度)は負の値として現れる。そして、車両を停止していくときに速度が徐々に低下して最終的に停止時に0となり、車輪加速度dVwも0となる。車両のずり下がりが発生すると速度が徐々に増加し車輪加速度dVwは正の値として現れる。換言すれば、登坂路で車両が走行状態から停止してずり下がり状態になる過程において、登坂方向(前進方向)を正とする車速が徐々に減少したのち、反登坂方向(後退方向)を正とする車速が徐々に増加することになるため、車輪加速度dVwは減速方向から加速方向に変化することになる。このため、車輪加速度dVwが正の値となった場合に加速中と判定している。あるいは、車輪加速度dVwが負の値(減速)から正の値(加速)に変化した場合に、加速中と判定しても良い。
【0038】
登坂路において、エンジン停止状態で車両が加速するのは、車両がずり下がり状態になったときにのみ発生する状況である。つまり、エンジン停止状態は無駆動力状態であり駆動力が発生しないため、車両前方への推進力が発生せず、このような状態において車両が加速するのは重力による車両のずり下がりである。このため、ステップ130、140で車両ずり下がり状態になる条件を満たしているか否かを判定し、その条件を満たしていればステップ150に進み、満たしていなければ車両ずり下がり状態ではないためそのまま処理を終了する。
【0039】
そして、ステップ150では、車両ずり下がり状態を抑制するために、アイドルストップ制御中に実行された車両ずり下がり状態判定処理であればエンジン始動要求を出力し、坂路保持制御中に実行された車両ずり下がり状態判定処理であれば制動力を増加させる出力を行い処理を終了する。
【0040】
これにより、エンジン始動要求が出力された場合には、アイドルストップECU6がエンジン始動要求の出力を受けてエンジン7を再始動させ、制動力を増加させる出力が出された場合には、ブレーキアクチュエータ8を駆動して制動力を増加させる。例えば、液圧によってホイールシリンダを自動加圧するシステムではモータを駆動して加圧用のポンプによる吸入吐出を行うと共に、各種制御弁をホイールシリンダを加圧できる弁位置に設定し、ポンプが吐出したブレーキ液によってホイールシリンダを加圧して制動力を増加させる。このように、エンジン再始動によって発生するクリープトルクにより車両のずり下がりを抑制したり、車両に対して制動力を加えることで車両のずり下がりを抑制することが可能となる。
【0041】
図3は、アイドルストップ制御中に車両ずり下がり状態判定処理を実行したときのタイミングチャートである。
【0042】
車両走行中にブレーキペダルが踏み込まれ、車速が所定の閾速度以下になるとアイドルストップ制御が実行される。この場合、図3に示すように、ブレーキスイッチ4がオンでブレーキペダルが踏まれた状態でマスタシリンダ圧が発生している状態において、エンジン7が停止してエンジン回転数が0となり、車速が徐々に低下していく。また、車輪加速度dVwとして負の値が生じる。つまり、車輪加速度dVwの絶対値|dVw|は徐々に低下していく。
【0043】
そして、時点Tにおいて、車両ずり下がり状態になると、車輪加速度dVwが減速方向から加速方向に変化し、車両ずり下がり状態になると同時に増加し正の値となる。このため、登坂路において、ブレーキスイッチ4がオンのときにエンジン停止していて、かつ、加速中という状況になるため、車両ずり下がり状態と判定され、エンジン始動要求が出される。これにより、エンジン7が再始動され、クリープトルクが発生して、車両のずり下がりが抑制される。
【0044】
なお、図3中では、車両ずり下がり状態になる直前に車速が0になっていないが、これは車輪速度センサ2のパルス信号では正確に車速が0になったことを検出できないためである。また、車両ずり下がり状態になったときに車速が正の値として増加しているが、これは車両が後退方向に進んでいる場合にも車速を正の値として表しているためである。
【0045】
以上説明したように、本実施形態では、車両が登坂方向に走行している登坂走行状態において、登坂方向の駆動力が発生しない無駆動力状態とされ、かつ、車輪加速度dVw(つまり車両加速度)が正の値となったときに車両ずり下がり状態と判定している。(あるいは減速方向から加速方向に変化したときに、車両ずり下がり状態と判定しても良い。)これにより、車両の積載重量の影響を受けることなく、正確に車両ずり下がり状態を判定することが可能となる。
【0046】
そして、このような正確な車両ずり下がり状態の判定結果に基づいて、アイドルストップ制御ではエンジン再始動を行い、坂路保持制御ではブレーキ力を増加させることで、車両ずり下がりを抑制することが可能となる。
【0047】
(他の実施形態)
上記実施形態では、アイドルストップ制御や坂路保持制御中に車両ずり下がり状態判定を行う場合について説明したが、この他の状況においても車両ずり下がり状態判定を行うことができる。すなわち、車両に登坂方向の駆動力が発生していない無駆動力状態において、車両加速度が減速方向から加速方向に変化するような状況は車両ずり下がり状態であることから、無駆動力状態となるような状況下において、車両ずり下がり状態判定を行うことができる。例えば、クラッチが非接続のときやギアがニュートラル(N)位置とされている場合に車両ずり下がり状態判定を行うことができる。
【0048】
また、上記実施形態において、車両加速度dVw(つまり車両加速度)が減速方向から加速方向に変化したときに、Gセンサ3の検出信号から求められる前後加速度の極性が変化したときには、車両ずり下がり状態と判定しないようにすると好ましい。この理由について、図4を参照して説明する。
【0049】
図4は、登坂路から降坂路に変化した場合の車両加速度の関係を表した図である。まず、図中の状態(1)ように、車両が紙面右方向から登坂路を走行中にブレーキが踏み込まれて減速しているような状況において、図中の状態(2)のように降坂路に変化した場合を想定してみる。
【0050】
このような場合には、ブレーキが掛かっているため車輪加速度dVwが減速度として現れ、車両の停止に近づくほど減速度が減少していくが、状態(1)から状態(2)に変化した後、降坂路の影響で車輪加速度dVwが増加することがある。このような状況は、図2に示したステップ100〜130の条件を満たして車両ずり下がり状態と判定される可能性がある。
【0051】
この場合において、状態(1)のときには、車両は登坂方向に走行している登坂走行状態であり、ブレーキにより生じる車両加速度と重力により生じる車両加速度は共に負の方向(進行方向と反対方向)となる。また、状態(2)のときには、車両は降坂方向に走行している降坂走行状態であり、ブレーキにより生じる車両加速度は負の方向(進行方向と反対方向)となり、重力により生じる車両加速度は正の方向(進行方向と同方向)となる。したがって、状態(1)から状態(2)に変化する際に、Gセンサ3の検出信号に基づいて求められる前後加速度の極性は負から正に変わることになる。
【0052】
このため、Gセンサ3の検出信号に基づいて求められる前後加速度、つまり前後加速度を車輪速度や車速等から演算するのではなく直接検出し、その前後加速度の極性が変化した場合には、上記のような状態(1)から状態(2)に変化した場合であると想定して、車両ずり下がり状態と判定しないようにすると好ましい。これにより、状態(1)から状態(2)に変化した場合に、誤って車両ずり下がり状態と判定してしまうことを防止することができる。
【0053】
なお、図1中のブレーキECU1の各部11〜13や図2中に示したステップは、各種処理を実行する手段に対応するものである。具体的には、ブレーキECU1のうち車輪加速度演算部11やステップ100の処理を行っている部分が車速検出手段や間接前後加速度演算手段、路面勾配推定演算部12やステップ110の処理を行っている部分が登坂走行判定手段、車輪制御要求部13やステップ130の処理を行っている部分が駆動状態判定手段、車両ずり下がり状態判定部13aやステップ140の処理を行っている部分が車両ずり下がり状態判定手段に相当する。
【符号の説明】
【0054】
1…ブレーキECU、2…車輪速度センサ、3…Gセンサ、4…ブレーキスイッチ、5…エンジンECU、6…アイドルストップECU、7…エンジン、11…車輪加速度演算部、12…路面勾配推定演算部、13…車両制御要求部、13a…車両ずり下がり状態判定部
【特許請求の範囲】
【請求項1】
車速を検出する車速検出手段(11、100)と、
前記車速検出手段(11、100)が検出した車速の変化から車両の前後方向の加速度である前後加速度を演算することで、間接的に前後加速度を演算する間接前後加速度演算手段(11、100)と、
前記車両の駆動力の発生状態を判定する駆動状態判定手段(13、130)と、
前記車両が登坂路を登坂方向に走行している登坂走行状態であることを判定する登坂走行判定手段(12、110)と、
前記車両が前記登坂路を前記登坂方向とは反対方向に移動する車両ずり下がり状態であることを判定する車両ずり下がり状態判定手段(13a、140)
前記車両ずり下がり状態判定手段(13a、140)は、前記登坂走行判定手段(12、110)にて前記登坂走行状態であると判定され、かつ、前記駆動状態判定手段(13、130)にて前記車両の駆動力が発生していない無駆動力状態であると判定されたときに、前記間接前後加速度演算手段(11、100)で演算された前記間接的な前後加速度が加速方向となったことを検出し、車両ずり下がり状態であることを判定することを特徴とする車両ずり下がり状態判定装置。
【請求項2】
前記駆動状態判定手段は、エンジンの停止、クラッチの非接続、ギアがニュートラル位置のうちの少なくとも1つが検出されたことをもって、前記無駆動力状態と判定することを特徴とする請求項1に記載の車両ずり下がり状態判定装置。
【請求項3】
前記車両に加わる重力加速度を含む前後加速度を直接検出する直接前後加速度検出手段(12、100)を有し、
前記車両ずり下がり状態判定手段(13a、140)は、前記間接前後加速度演算手段(11、100)が演算した前記間接的な前後加速度が加速方向となったときに、前記直接前後加速度検出手段(12、100)で検出された前記重力加速度を含む前後加速度の極性が変化した際には、前記車両ずり下がりと判定しないことを特徴とする請求項1または2に記載の車両ずり下がり状態判定装置。
【請求項4】
請求項1ないし3のいずれか1つに記載の車両ずり下がり状態判定装置を備え、該車両ずり下がり状態判定装置での判定結果に基づいて車両制御を行う車両制御装置において、
前記車両制御として前記車両を停止させる際にエンジン(7)を自動的に停止させる共に前記車両を発進させる際に前記エンジン(7)を自動的に再始動させるアイドルストップ制御を実行し、前記アイドルストップ制御中に前記車両ずり下がり状態判定装置にて前記車両ずり下がり状態と判定されると、前記エンジン(7)を始動させるエンジン始動手段(150)を備えていることを特徴とする車両制御装置。
【請求項5】
請求項1ないし3のいずれか1つに記載の車両ずり下がり状態判定装置を備え、該車両ずり下がり状態判定装置での判定結果に基づいて車両制御を行う車両制御装置において、
前記車両ずり下がり状態判定装置にて前記車両ずり下がり状態と判定されると、前記車両制御として前記車両の制動力を増加させる制御を実行する制動力増加手段(150)を備えていることを特徴とする車両制御装置。
【請求項1】
車速を検出する車速検出手段(11、100)と、
前記車速検出手段(11、100)が検出した車速の変化から車両の前後方向の加速度である前後加速度を演算することで、間接的に前後加速度を演算する間接前後加速度演算手段(11、100)と、
前記車両の駆動力の発生状態を判定する駆動状態判定手段(13、130)と、
前記車両が登坂路を登坂方向に走行している登坂走行状態であることを判定する登坂走行判定手段(12、110)と、
前記車両が前記登坂路を前記登坂方向とは反対方向に移動する車両ずり下がり状態であることを判定する車両ずり下がり状態判定手段(13a、140)
前記車両ずり下がり状態判定手段(13a、140)は、前記登坂走行判定手段(12、110)にて前記登坂走行状態であると判定され、かつ、前記駆動状態判定手段(13、130)にて前記車両の駆動力が発生していない無駆動力状態であると判定されたときに、前記間接前後加速度演算手段(11、100)で演算された前記間接的な前後加速度が加速方向となったことを検出し、車両ずり下がり状態であることを判定することを特徴とする車両ずり下がり状態判定装置。
【請求項2】
前記駆動状態判定手段は、エンジンの停止、クラッチの非接続、ギアがニュートラル位置のうちの少なくとも1つが検出されたことをもって、前記無駆動力状態と判定することを特徴とする請求項1に記載の車両ずり下がり状態判定装置。
【請求項3】
前記車両に加わる重力加速度を含む前後加速度を直接検出する直接前後加速度検出手段(12、100)を有し、
前記車両ずり下がり状態判定手段(13a、140)は、前記間接前後加速度演算手段(11、100)が演算した前記間接的な前後加速度が加速方向となったときに、前記直接前後加速度検出手段(12、100)で検出された前記重力加速度を含む前後加速度の極性が変化した際には、前記車両ずり下がりと判定しないことを特徴とする請求項1または2に記載の車両ずり下がり状態判定装置。
【請求項4】
請求項1ないし3のいずれか1つに記載の車両ずり下がり状態判定装置を備え、該車両ずり下がり状態判定装置での判定結果に基づいて車両制御を行う車両制御装置において、
前記車両制御として前記車両を停止させる際にエンジン(7)を自動的に停止させる共に前記車両を発進させる際に前記エンジン(7)を自動的に再始動させるアイドルストップ制御を実行し、前記アイドルストップ制御中に前記車両ずり下がり状態判定装置にて前記車両ずり下がり状態と判定されると、前記エンジン(7)を始動させるエンジン始動手段(150)を備えていることを特徴とする車両制御装置。
【請求項5】
請求項1ないし3のいずれか1つに記載の車両ずり下がり状態判定装置を備え、該車両ずり下がり状態判定装置での判定結果に基づいて車両制御を行う車両制御装置において、
前記車両ずり下がり状態判定装置にて前記車両ずり下がり状態と判定されると、前記車両制御として前記車両の制動力を増加させる制御を実行する制動力増加手段(150)を備えていることを特徴とする車両制御装置。
【図1】


【図2】
【図3】
【図4】

【図2】
【図3】
【図4】
【公開番号】特開2012−193668(P2012−193668A)
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願番号】特願2011−58200(P2011−58200)
【出願日】平成23年3月16日(2011.3.16)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願日】平成23年3月16日(2011.3.16)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]