
車両における操作対象装置の制御装置及び制御方法
【課題】握持部から手を離したり、手を大きくずらしたりすることなく操作対象装置を操作することができる車両における操作対象装置の制御装置を提供する。
【解決手段】センサデータ生成部22は、ステアリングホイールの握持部を覆うように装着されたタッチセンサ21から得られる接触検出信号に基づいてセンサデータを生成する。検出部10aは、センサデータに基づいて、運転者が握持部を握っているか否か、タッチセンサ21に対する入力操作を検出する。制御部10は、検出部10aによって運転者が握持部を握っていることが検出され、タッチセンサ21に対して特定の入力操作が行われたことが検出された場合に、特定の入力操作に応じて操作対象装置を制御する。制御部10は、車両が特定の状態にあるときには、操作対象装置の制御を無効とする。
【解決手段】センサデータ生成部22は、ステアリングホイールの握持部を覆うように装着されたタッチセンサ21から得られる接触検出信号に基づいてセンサデータを生成する。検出部10aは、センサデータに基づいて、運転者が握持部を握っているか否か、タッチセンサ21に対する入力操作を検出する。制御部10は、検出部10aによって運転者が握持部を握っていることが検出され、タッチセンサ21に対して特定の入力操作が行われたことが検出された場合に、特定の入力操作に応じて操作対象装置を制御する。制御部10は、車両が特定の状態にあるときには、操作対象装置の制御を無効とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載されているナビゲーション装置等の車載機器、または、変速機や方向指示器等の車両の動作を制御する車両動作制御装置を操作対象装置とし、操作対象装置を制御する制御装置及び制御方法に関する。
【背景技術】
【0002】
車両に搭載されているナビゲーション装置等の車載機器を操作するための操作スイッチをステアリングホイールに配置した車両が普及している(特許文献1参照)。操作スイッチをステアリングホイールに配置すれば、運転者は車載機器を操作する際に車載機器まで手を伸ばす必要がないので、操作性が向上する。特許文献1に記載されているように、操作スイッチは、実際には、運転者が手で握る握持部であるステアリングホイールの円環状部ではなく、エアバッグが収納されているセンター部と円環状部との間を連結する連結部に配置されるのが通常である。従って、運転者は、操作スイッチを操作するために、握っている円環状部から手を離したり、手を大きくずらしたりする必要がある。特許文献2には、円環状部の背面や内側側面に操作スイッチを配置することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−106353号公報
【特許文献2】特開2005−348123号公報
【特許文献3】特開2008−195220号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献2に記載の発明によれば、円環状部に操作スイッチを配置しているので、円環状部から手を離したり、手を大きくずらしたりすることなく、操作スイッチを操作することができる。しかしながら、特許文献2に記載されている操作スイッチは押しボタンによるキーや凹凸を設けたキーであり、この種のキーは運転者がステアリングホイールを操作する際の支障となる可能性がある。運転者が握る円環状部に大きな凹凸を設けることは好ましくない。また、円環状部に操作スイッチのような操作部を配置した場合、運転者が通常の運転のために円環状部を握っている場合のように、操作対象装置を操作しようとする意思がない場合に、不用意に操作対象装置が操作されないようにすることが求められる。さらに、車両の状態によっては誤操作を招く場合があり、誤操作を極力少なくすることが求められる。
【0005】
本発明はこのような要望に対応するため、握持部から手を離したり、手を大きくずらしたりすることなく操作対象装置を操作することができ、運転者がステアリングホイールを操作する際に支障となる可能性を大幅に低減させることができる車両における操作対象装置の制御装置及び制御方法を提供することを目的とする。また、誤操作を大幅に低減させることができる車両における操作対象装置の制御装置及び制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上述した従来の技術の課題を解決するため、複数の検出領域を有し、車両のステアリングホイール(200,201)における運転者が握る握持部(200r,201s)の所定の範囲に、前記握持部を覆うように装着されたタッチセンサ(21)から得られる接触検出信号に基づいて、どの検出領域が触られているかを示す位置データを含むセンサデータを生成するセンサデータ生成部(22)と、前記センサデータに基づいて、運転者が前記握持部を握っているか否か、及び、前記タッチセンサに対する入力操作を検出する検出部(10a)と、前記検出部によって運転者が前記握持部を握っていることが検出され、かつ、前記タッチセンサに対して特定の入力操作が行われたことが検出された場合に、前記特定の入力操作に応じて、前記タッチセンサによって操作する対象の操作対象装置を制御する制御部(10)とを備え、前記制御部は、車両が特定の状態にあるときに、前記操作対象装置の制御を無効とすることを特徴とする車両における操作対象装置の制御装置を提供する。
【0007】
上記の車両における操作対象装置の制御装置において、前記制御部は、前記ステアリングホイールの回転角度が所定の角度を超えたとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることが好ましい。また、前記制御部は、方向指示器が操作されたとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることが好ましい。さらに、前記制御部は、シフトレバーのシフト位置がリバースとなったとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることが好ましい。
【0008】
上記の車両における操作対象装置の制御装置において、前記タッチセンサには、前記複数の検出領域の一部を含み、運転者の手のひらの接触を検出するグリップ検出エリア(Arg)と、前記複数の検出領域の他の一部を含み、指の接触による前記特定の入力操作を検出する操作検出エリア(Arv)とが設定されており、前記検出部は、前記グリップ検出エリアから得られる接触検出信号に基づくセンサデータによって運転者が前記握持部を握っているか否かを検出し、前記操作検出エリアから得られる接触検出信号に基づくセンサデータによって前記特定の入力操作を検出することが好ましい。
【0009】
上記の車両における操作対象装置の制御装置において、前記制御部は、前記特定の入力操作として、前記操作検出エリアに対して、前記握持部を前記ステアリングホイールの径方向に切断したときの断面における周方向に離間した2箇所を2つの指によって操作したパターンに応じて、前記操作対象装置を制御することが好ましい。
【0010】
上記の車両における操作対象装置の制御装置において、前記タッチセンサは、運転者が左手で握る握持部の所定の範囲に装着された第1のタッチセンサ(21L)と右手で握る握持部の所定の範囲に装着された第2のタッチセンサ(21R)とを含み、前記制御部は、前記特定の入力操作として、前記第1のタッチセンサに対する第1の入力操作と前記第2のタッチセンサに対する第2の入力操作との組み合わせによるパターンに応じて、前記操作対象装置を制御することが好ましい。
【0011】
また、本発明は、上述した従来の技術の課題を解決するため、複数の検出領域を有し、車両のステアリングホイール(200,201)における運転者が握る握持部(200r,201s)の所定の範囲に、前記握持部を覆うように装着されたタッチセンサ(21)を運転者が握っているか否かを検出し、前記タッチセンサに対して特定の入力操作が行われたか否かを検出し、車両が特定の状態にあるか否かを検出し、車両が特定の状態にはないことが検出され、運転者が前記タッチセンサを握っていることが検出され、かつ、前記特定の入力操作が行われたことが検出された場合に、前記タッチセンサによって操作する対象の操作対象装置を制御することを特徴とする車両における操作対象装置の制御方法を提供する。
【0012】
上記の車両における操作対象装置の制御方法において、前記ステアリングホイールの回転角度が所定の角度を超えたとき車両が特定の状態にあるにあるとして、前記操作対象装置の制御を無効とすることが好ましい。また、方向指示器が操作されたとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることが好ましい。さらに、シフトレバーのシフト位置がリバースとなったとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることが好ましい。
【0013】
上記の車両における操作対象装置の制御方法において、前記タッチセンサには、前記複数の検出領域の一部を含み、運転者の手のひらの接触を検出するグリップ検出エリア(Arg)と、前記複数の検出領域の他の一部を含み、指の接触による前記特定の操作を検出する操作検出エリア(Arv)とが設定されており、前記グリップ検出エリアに対する手のひらの接触によって、運転者が前記タッチセンサを握っていることを検出し、前記操作検出エリアに対する指の接触によって、前記特定の入力操作が行われたことを検出することが好ましい。
【0014】
上記の車両における操作対象装置の制御方法において、前記特定の入力操作として、前記操作検出エリアに対して、前記握持部を前記ステアリングホイールの径方向に切断したときの断面における周方向に離間した2箇所を2つの指によって操作したパターンに応じて、前記操作対象装置を制御することが好ましい。
【0015】
上記の車両における操作対象装置の制御方法において、前記タッチセンサは、運転者が左手で握る握持部の所定の範囲に装着された第1のタッチセンサ(21L)と右手で握る握持部の所定の範囲に装着された第2のタッチセンサ(21R)とを含み、前記特定の入力操作として、前記第1のタッチセンサに対する第1の入力操作と前記第2のタッチセンサに対する第2の入力操作との組み合わせによるパターンに応じて、前記操作対象装置を制御することが好ましい。
【発明の効果】
【0016】
本発明の車両における操作対象装置の制御装置及び制御方法によれば、握持部から手を離したり、手を大きくずらしたりすることなく操作対象装置を操作することができ、運転者がステアリングホイールを操作する際に支障となる可能性を大幅に低減させることができる。また、誤操作を大幅に低減させることができる。
【図面の簡単な説明】
【0017】
【図1】本発明の車両における操作対象装置の制御装置の一実施形態を示すブロック図である。
【図2】一実施形態の操作対象装置の制御装置を備える車両の例を示す部分平面図である。
【図3】一実施形態におけるタッチセンサをステアリングホイールに装着する位置及び範囲の例を示す図である。
【図4】一実施形態におけるタッチセンサをステアリングホイールに装着する位置及び範囲の他の例を示す図である。
【図5】タッチセンサを変形ステアリングホイールに装着する例を示す図である。
【図6】ステアリングホイールにおけるタッチセンサの部分を握っている状態でセンサデータが得られる部分の例を示す部分斜視図である。
【図7】タッチセンサにおける断面周方向の座標を示す断面図である。
【図8】図6に示すタッチセンサを展開した状態を示す平面図である。
【図9】図8に示す各領域を均等の大きさに変換した状態を示す模式図である。
【図10】ステアリングホイールにおけるタッチセンサの部分を握っていると判定するための要件の例を示す図である。
【図11】タッチセンサに対する特定の入力操作の例を示す模式図である。
【図12】タッチセンサに対する特定の入力操作の他の例を示す模式図である。
【図13】タッチセンサに対する特定の入力操作のさらに他の例を示す模式図である。
【図14】一実施形態の動作を説明するためのフローチャートである。
【図15】ステアリングホイールの回転角度を説明するための図である。
【図16】図14のステップS4の具体的な処理の例を示すフローチャートである。
【図17】タッチセンサを操作した際に色を変化させるための構成例を示す模式的な斜視図である。
【図18】タッチセンサを操作した際に触覚を変化させるための構成例を示す模式的な斜視図である。
【図19】ステアリングホイールの構成例を示す平面図である。
【発明を実施するための形態】
【0018】
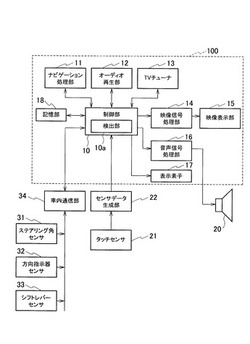
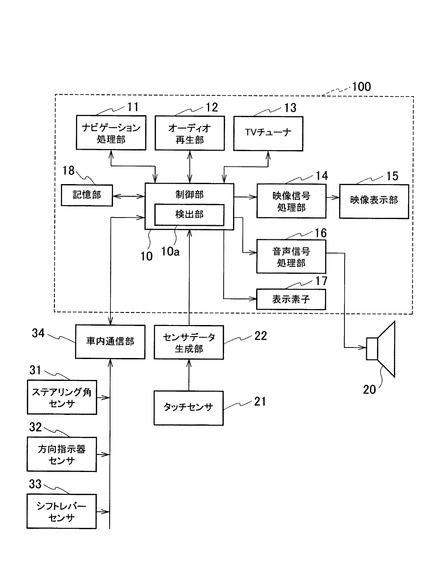
以下、本発明の車両における操作対象装置の制御装置及び制御方法の一実施形態について、添付図面を参照して説明する。図1,図2において、車載機器100は、車両のダッシュボード内に装着されている。図1に示す例では、車載機器100は、制御部10,ナビゲーション処理部11,オーディオ再生部12,テレビジョン(TV)チューナ13,映像信号処理部14,映像表示部15,音声信号処理部16,表示素子17,記憶部18を備えている。制御部10は検出部10aを含む。
【0019】
ナビゲーション処理部11は地図データを保持する記憶部とGPSアンテナ等を有しており、制御部10とナビゲーション処理部11とが協同して経路案内を行う。オーディオ再生部12は、制御部10による制御に従って、例えばコンパクトディスク等の光ディスクや半導体メモリに記録されているオーディオ信号を再生する。TVチューナ13は、制御部10による制御に従って、所定の放送局のTV放送波信号を受信する。ナビゲーション処理部11またはTVチューナ13より出力された映像信号は、制御部10を介して映像信号処理部14に入力されて処理され、液晶パネル等の映像表示部15に表示される。
【0020】
ナビゲーション処理部11,オーディオ再生部12,TVチューナ13より出力された音声信号は、制御部10を介して音声信号処理部16に入力されて処理され、外部のスピーカ20にて発音される。音声信号処理部16は増幅部を含む。スピーカ20は、車両のドアの内部等に設置されている。表示素子17は例えば発光ダイオード(LED)であり、制御部10による制御に従って、後述するタッチセンサ21の接触状態に応じて点灯または消灯する。表示素子17は、運転者から視認できるように、例えば車載機器100の筐体に配置する。表示素子17を車載機器100から離して、車両のステアリングホイール200の近傍に配置してもよい。記憶部18は不揮発性のメモリである。
【0021】
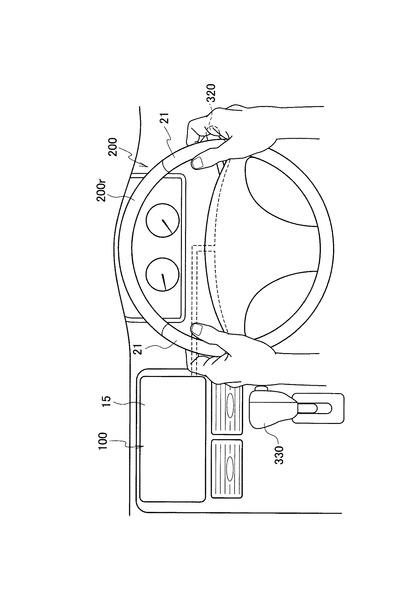
図2に示すように、操作部であるタッチセンサ21は、ステアリングホイール200の円環状部200rに装着されている。円環状部200rは、運転者が運転の際に握る部分である握持部である。図2に示す例では、タッチセンサ21は、円環状部200rにおける左右それぞれの所定の角度範囲に装着されている。タッチセンサ21は、複数箇所の接触を検出することができる、いわゆる多点検出(マルチタッチ)のタッチセンサである。タッチセンサ21は、円環状部200rの径方向の断面の周上に、360°の範囲で装着することが好ましい。360°未満の範囲であっても、実質的に円環状部200rの断面の周のほぼ全体を覆っていればよい。
【0022】
運転者は、円環状部200rのタッチセンサ21が装着された部分を握っている。図1において、タッチセンサ21の出力はセンサデータ生成部22に入力される。タッチセンサ21を手で触ると、接触検出信号がセンサデータ生成部22へと入力される。センサデータ生成部22は、入力された接触検出信号に基づいて、タッチセンサ21のどの位置から接触検出信号が得られたかを示す位置データを含むセンサデータを生成して制御部10に供給する。タッチセンサ21とセンサデータ生成部22とを一体化してもよいし、センサデータ生成部22を制御部10内に設けてもよい。
【0023】
タッチセンサ21としては、例えば投影式静電容量(相互キャパシタンス)方式のタッチセンサを用いることができる。円環状部200rに装着するタッチセンサ21としては、一例として、ミクロ技術研究所が開発した可撓性を有するタッチパネルを採用することができる。この可撓性を有するタッチパネルは、センサ部を0.02〜0.05mmの板厚を有する超薄板ガラスとし、超薄板ガラスとPET(ポリエチレンテレフタレート)フィルムとを貼り合わせた構造になっている。円環状部200rにタッチセンサ21を装着しても、タッチセンサ21は手や指で知覚できるほどの凹凸を有さないので、運転者がステアリングホイール200を操作する際に支障となることはほとんどない。
【0024】
図2に破線にて示すように、タッチセンサ21と車載機器100とを結ぶ電線を、ステアリングホイール200及びダッシュボードの内部を通して配線することが好ましい。
【0025】
図1,図2において、ステアリング角センサ31は、ステアリングホイール200の回転角度を検出する。方向指示器センサ32は、方向指示器320の操作を検出する。シフトレバーセンサ33は、シフトレバー330によるシフト位置がどこにあるかを検出する。ステアリング角センサ31,方向指示器センサ32,シフトレバーセンサ33の各検出信号は、車内通信部34を介して制御部10へと供給される。
【0026】
図3を用いて、タッチセンサ21をステアリングホイール200の円環状部200rに装着する位置及び範囲の例について説明する。なお、上、下、右、左とは、ステアリングホイール200を回転させていない状態(車両が直進する状態)において、運転者の位置からステアリングホイール200を見たときの上、下、右、左であるとする。図3(A)は、円環状部200rの全周にタッチセンサ21を装着した例である。図3(B)は、図2と同様であり、円環状部200rにおける上方で左右それぞれの所定の角度範囲にタッチセンサ21を互いに離間させて装着した例である。図3(C)は、円環状部200rにおける上方で右側のみの所定の角度範囲にタッチセンサ21を装着した例である。
【0027】
図3(D)は、円環状部200rにおける下方で左右それぞれの所定の角度範囲にタッチセンサ21を互いに離間させて装着した例である。図3(E)は、円環状部200rにおける頂部を含む上方の比較的広い角度範囲にタッチセンサ21を装着した例である。図3(E)は図3(B)における左右のタッチセンサ21を連結したものに相当する。
【0028】
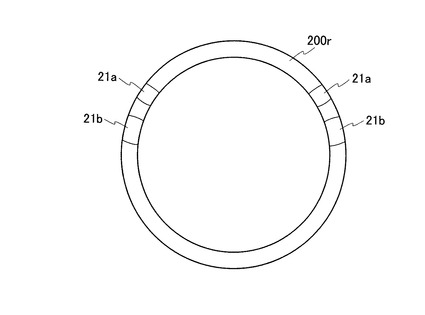
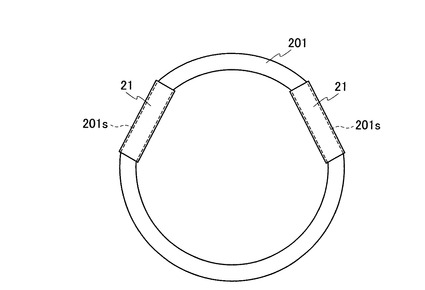
図4は、図3(B)における左右のタッチセンサ21を、上側のタッチセンサ21aと下側のタッチセンサ21bとに分割した例である。図4の例では、上側のタッチセンサ21aは手の人差し指と親指による接触を検出し、下側のタッチセンサ21bは主として手のひら,中指,薬指による接触を検出する。図5は、円形ではない変形ステアリングホイール201にタッチセンサ21を装着した例である。タッチセンサ21は、変形ステアリングホイール201の左右の直線部201sに装着されている。運転者は握持部である直線部201sを握って運転し、タッチセンサ21が手のひらや指による接触を検出する。
【0029】
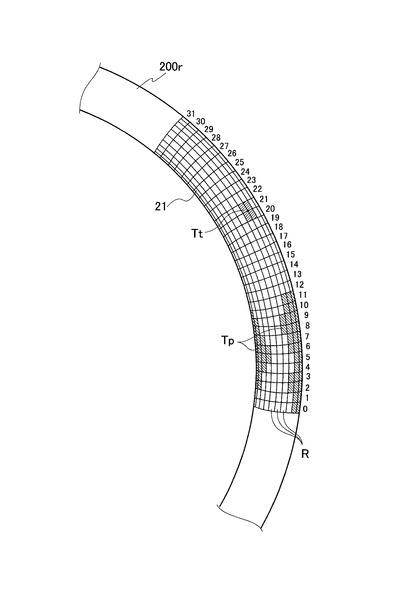
ここで、図2に示すように、タッチセンサ21が円環状部200rにおける上方で左右に装着されており、運転者がタッチセンサ21の部分を握っている場合に、タッチセンサ21によって手のひらや指の接触がどのように検出されるかについて説明する。図6は、図2の右側のタッチセンサ21を運転者が握った場合に、手のひらと指が接触している範囲の例を示している。運転者が円環状部200rを手で握る握り方、手の大きさは一様ではなく、図6は単なる例である。
【0030】
図6に示す例では、ハッチングを付したTpで示す複数の検出領域Rが手のひらの接触を検出している部分であり、ハッチングを付したTtで示す複数の検出領域Rが親指の接触を検出している部分である。以下、手のひら接触検出部Tp、親指接触検出部Ttと称することとする。図6では見えていない車両の進行方向側であるタッチセンサ21の裏面側には、人差し指が接触する。
【0031】
図6に示すように、タッチセンサ21は手のひらや指の接触を検出する検出部分として複数の検出領域Rを有している。タッチセンサ21の各検出領域Rには座標が設定されている。図6に示すように、円環状部200rの周方向において、タッチセンサ21の下端部に位置している検出領域Rを座標0とし、上端部に位置している検出領域Rまで1,2,…,30,31と周方向の座標を設定している。タッチセンサ21における円環状部200rの周方向の座標をY座標とする。
【0032】
図7は、タッチセンサ21を装着している部分で円環状部200rの径方向に円環状部200rを切断した断面図である。図7に示すように、円環状部200rの断面において、例えば円環状部200rの内径側に位置している検出領域Rを座標0とする。断面における周方向のそれぞれの検出領域Rに、円環状部200rの内径側から正面側、正面側から外径側、外径側から裏面側、裏面側から内径側へと図7の反時計方向に1,2,…,21,22と座標を設定している。タッチセンサ21における断面の周方向の座標をX座標とする。センサデータ生成部22は、接触検出信号が得られた検出領域RのX座標,Y座標によって運転者がタッチセンサ21のどこを触っているかを示す位置データを得ることができる。
【0033】
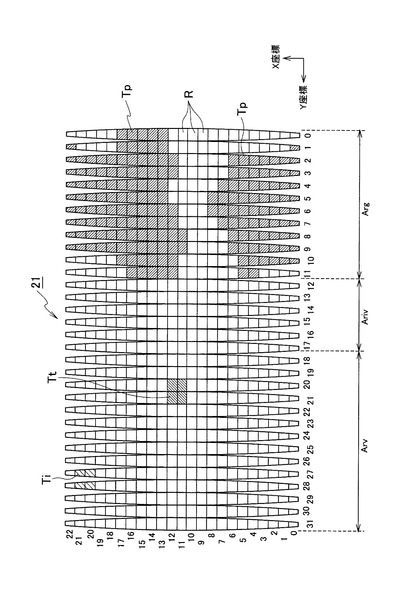
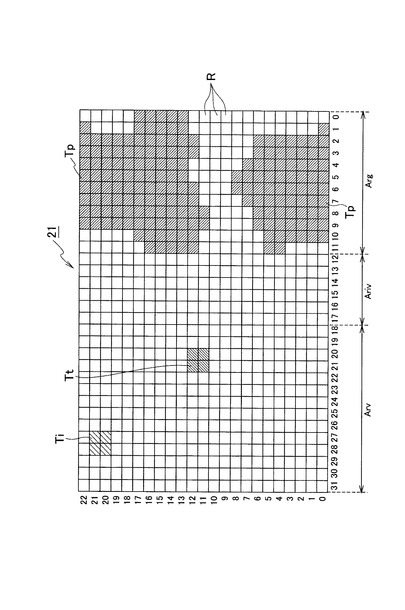
図6に示すタッチセンサ21を展開すると、図8のようになる。図8に示すタッチセンサ21の各領域を均等の大きさに変換した状態を模式的に示すと、図9のようになる。図8,図9においては、手のひら接触検出部Tpと親指接触検出部Ttに加えて、人差し指が接触している複数の検出領域Rである人差し指接触検出部Tiも示している。なお、タッチセンサ21に中指や薬指または小指が接触すれば、タッチセンサ21はそれらの指の接触も検出する。本実施形態においては、運転者が、タッチセンサ21上で特定の入力操作を行うのに好適な親指または人差し指を操作のための指として用いることとする。
【0034】
親指または人差し指による入力操作の詳細については後に詳述することとする。制御部10の検出部10aは、センサデータ生成部22から出力されるセンサデータに基づいて、親指または人差し指によってタッチセンサ21上で入力操作が行われたことを検出する。検出部10aは、センサデータ生成部22から出力されるセンサデータに基づいて、円環状部200r(タッチセンサ21)を握っていることも検出する。制御部10は、タッチセンサ21に対して行った特定の入力操作に応じて操作対象装置を制御する。
【0035】
操作対象装置は一例として車載機器100である。具体的には、制御部10は、特定の入力操作に応じて、ナビゲーション処理部11における経路案内に関する制御を実行させたり、オーディオ再生部12におけるオーディオ信号を再生または停止させたり、再生するトラック(楽曲)を進めたり戻したりすることができる。また、制御部10は、特定の入力操作に応じて、TVチューナ13における受信チャンネルを切り換えたり、音声信号処理部16の増幅部を制御して音量を減少または増加させたりすることができる。
【0036】
操作対象装置の他の例は、車両の動作を制御する車両動作制御装置である。具体的には、制御部10は、車内通信部34を介して、変速機、方向指示器、エアーコンディショナのオン・オフ、エアーコンディショナの設定温度等を制御してもよい。なお、操作対象装置を車両動作制御装置とする場合には、センサデータ生成部22から出力されるセンサデータを車両が有する制御部に入力して、車両動作制御装置を制御することが好ましい。操作対象装置を制御する制御部は、車載機器100内の制御部10であってもよいし、車両に備えられている車載機器100外部の制御部であってもよい。
【0037】
本実施形態によれば、運転者が握る円環状部200rに極めて薄いタッチセンサ21を装着して、タッチセンサ21を操作することによって操作対象装置を操作するので、円環状部200rから手を離したり、手を大きくずらしたりすることなく操作対象装置を操作することができる。また、タッチセンサ21は円環状部200rの表面上で凹凸がないため、運転者がステアリングホイール200を操作する際に支障となる可能性はほとんどない。
【0038】
ところで、運転者が通常の運転のために円環状部200rを握っている場合のように、操作対象装置を操作しようとする意思がない場合に、不用意に操作対象装置が操作されないようにすることが必要となる。そこで、本実施形態においては、運転者が意図しない誤操作を回避するために、次のようにしている。
【0039】
図8,図9に示すように、タッチセンサ21上の複数の検出領域Rに、手のひらの接触を検出するためのグリップ検出エリアArgと、親指または人差し指による操作入力を有効として、操作入力を検出するための操作検出エリアArvと、グリップ検出エリアArgと操作検出エリアArvとの間の中間領域であり、操作入力を無効とする操作無効エリアArivとを設定している。手のひら接触検出部Tpはグリップ検出エリアArg内に位置し、親指接触検出部Tt及び人差し指接触検出部Tiは操作検出エリアArv内に位置する。
【0040】
操作無効エリアArivは、グリップ検出エリアArgと操作検出エリアArvと同様に、手のひらまたは指の接触を検出する検出領域Rを有するものの、制御部10(検出部10a)またはセンサデータ生成部22が操作無効エリアArivからの入力操作を無効とするように処理することによって、操作無効エリアとすることができる。また、操作無効エリアArivの範囲に検出領域Rを設けないようにタッチセンサ21を構成することにより、操作無効エリアとしてもよい。この場合、図4に示す例と実質的に等価である。
【0041】
運転者が通常の運転のために円環状部200rを握っている場合には、手のひら接触検出部Tpと親指接触検出部Tt及び人差し指接触検出部Tiとは比較的近い位置となる。そこで、運転者が単に円環状部200rを握っている場合と、操作対象装置を操作しようとしてタッチセンサ21を触った場合とを的確に区別するために、本実施形態においては、操作無効エリアArivを設けている。運転者は、操作対象装置を操作しようとする場合には、親指や人差し指を意図的に伸ばしてタッチセンサ21を触って、後述する特定の入力操作を行うようにする。制御部10は、操作検出エリアArv内で後述する特定の入力操作が行われた場合に、入力操作に応じて操作対象装置を制御する。
【0042】
運転者が運転のために円環状部200rを握っていない状態で、操作検出エリアArvに不用意に触った場合に、操作対象装置が誤操作されることを回避することも必要である。そこで、本実施形態においては、検出部10aは、グリップ検出エリアArgで所定の面積以上の手のひら接触検出部Tpが得られた場合に、円環状部200rを握っていると判断する。制御部10は、円環状部200rを握っており、かつ、操作検出エリアArv内で特定の操作が行われた場合に操作対象装置を制御するように構成している。円環状部200rを握っていると判断する手のひら接触検出部Tpの面積は、複数の運転者がステアリングホイール200を通常の握り方で握った場合の面積を統計的に調べて、適宜に設定すればよい。
【0043】
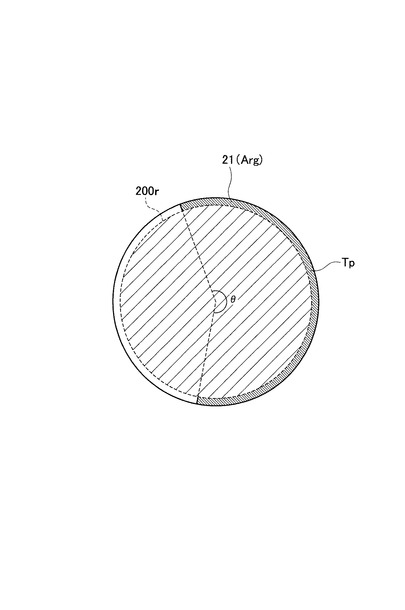
グリップ検出エリアArgにおける手のひら接触検出部Tpの面積は、運転者が円環状部200rを握っていると判定するための要件の一例であり、判定するための要件これに限定されるものではない。図10は、タッチセンサ21のグリップ検出エリアArgの部分で円環状部200rを切断した断面を示している。検出部10aは、手のひら接触検出部Tpの断面周方向の角度θが所定の角度以上のときに円環状部200rを握っていると判断することができる。所定の角度は例えば180°である。
【0044】
以上のように、本実施形態においては、運転者が円環状部200r(タッチセンサ21)を握っているか否かを判定して、円環状部200rを握っている場合のみタッチセンサ21に対する操作入力を受け付けるようにしているので、操作検出エリアArvに不用意に触った場合の誤操作を回避することができる。本実施形態においては、好ましい構成として、操作検出エリアArvをグリップ検出エリアArgから所定の距離離間させた位置に設けているので、運転者が意図的にタッチセンサ21に対して特定の入力操作を行っていることを的確に検出することができる。従って、誤操作を大幅に低減させることができる。
【0045】
また、本実施形態においては、グリップ検出エリアArgにおける手のひら接触検出部Tpの面積や断面周方向の角度θを、運転者が円環状部200rを握っているか否かを判定する要件としているので、円環状部200rを握っているか否かを的確に判定することができる。従って、運転者が円環状部200rを握っていない状態で、操作検出エリアArvに不用意に触った場合の誤操作も回避することができる。
【0046】
制御部10は、検出部10aが、グリップ検出エリアArgからの接触検出信号に基づくセンサデータによって運転者が円環状部200r(タッチセンサ21)を握っていることを検出した場合に、運転者に、操作検出エリアArvによる操作入力が可能であることを知らせるために、表示素子17を点灯させる。運転者は、表示素子17の点灯・消灯によって、タッチセンサ21によって操作対象装置を操作することができるか否かを判断することができる。表示素子17をステアリングホイール200の近傍に配置する方が好ましい。
【0047】
ところで、図3(A)のように円環状部200rの全周にタッチセンサ21を装着したり、図3(E)のように比較的広い範囲にタッチセンサ21を装着したりした場合には、運転者がタッチセンサ21を握る位置は固定されない。そこで、図8及び図9で説明したグリップ検出エリアArgと操作検出エリアArvや、必要に応じて設ける操作無効エリアArivの位置は、運転者がタッチセンサ21を握った位置に応じて動的に設定する必要がある。
【0048】
そこで、制御部10は、グリップ検出エリアArg等が未設定の状態でタッチセンサ21が握られた場合には、手のひら接触検出部Tpを含む領域をグリップ検出エリアArgに設定する。手のひら接触検出部Tpを含むY座標の所定の範囲をグリップ検出エリアArgとすればよい。前述のように、手のひら接触検出部Tpは所定の面積以上となるので、タッチセンサ21上の複数の検出領域Rにおいて所定の面積以上触られていることが検出された部分が手のひら接触検出部Tpとなる。または、図10で説明したように、タッチセンサ21の部分で円環状部200rを切断した断面周方向で、所定の角度以上触られていることが検出された部分が手のひら接触検出部Tpとなる。
【0049】
制御部10は、グリップ検出エリアArgを設定したら、グリップ検出エリアArgよりも上側のY座標の所定の範囲を操作検出エリアArvと設定する。この場合、必要に応じて、グリップ検出エリアArgと隣接するY座標の所定の範囲を操作無効エリアArivとして設定し、グリップ検出エリアArgをグリップ検出エリアArgから離間させた位置とする。
【0050】
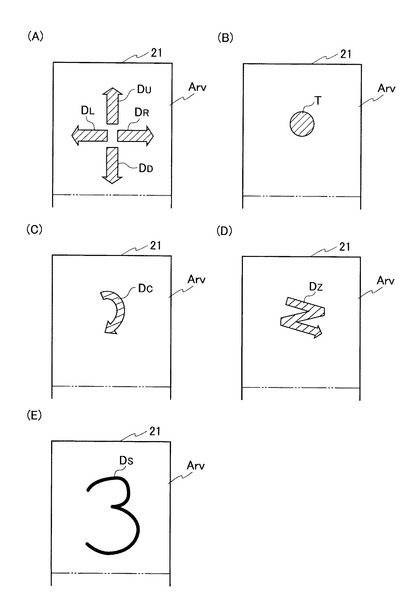
次に、図11〜図13を用いて、運転者が親指または人差し指を用いてタッチセンサ21に対して行う特定の入力操作の例を説明する。図11(A)〜(E)は、タッチセンサ21の運転者と対向する正面側または裏面側である半分を模式的な平面で示している。図11(A)〜(E)に示す操作は、正面側であれ親指で、裏面側であれば人差し指で行われることになる。図11(A)において、DRは、親指または人差し指をタッチセンサ21(操作検出エリアArv)上で右方向に滑らせる右方向ドラッグであり、DLは親指または人差し指を右方向に滑らせる左方向ドラッグである。DUは親指または人差し指を上方向に滑らせる上方向ドラッグであり、DDは親指または人差し指をした方向に滑らせる下方向ドラッグである。
【0051】
図11(A)において、右方向ドラッグDR,左方向ドラッグDL,上方向ドラッグDU,下方向ドラッグDDの代わりに、親指または人差し指でそれぞれの方向にタッチセンサ21をはじくフリックとしてもよい。
【0052】
図11(B)は、親指または人差し指でタッチセンサ21をたたくタップTを示している。図11(C)は、親指または人差し指でタッチセンサ21上に円弧を描くようにドラッグする円弧ドラッグDCを示している。図11(D)は、親指または人差し指でタッチセンサ21上にジグザグ状にドラッグするジグザグドラッグDZを示している。図11(E)は、親指または人差し指で記号を書くようにドラッグする記号入力ドラッグDSを示している。図11(E)は記号として数字の3を描いた状態を示している。記号としては、認識が比較的容易な数字やアルファベットを用いることが好ましい。
【0053】
図12(A)〜(D)は、タッチセンサ21を開いてタッチセンサ21の正面側の半分である正面部21fと裏面側の半分である裏面部21rとを模式的な平面で示している。正面部21fは、図8,図9に示すX座標の0〜11の部分であり、裏面部21rは、X座標の12〜22の部分である。図8,図9に示す例では、厳密には正面部21fと裏面部21rとは均等の面積にはならないが、図12(A)〜(D)では正面部21fと裏面部21rとを同じ面積で示している。図12(A)〜(D)は理解を容易にするため、裏面部21rは、裏面部21rを円環状部200rの裏面側から見た状態ではなく、正面部21fから裏面部21rを透視した状態を示している。
【0054】
図12(A)〜(D)に示すように、正面部21fに対する親指による入力操作と裏面部21rに対する人差し指による入力操作とを組み合わせたパターンをタッチセンサ21に対する特定の入力操作としてもよい。図12(A)は、正面部21fで親指を右方向に滑らせる右方向ドラッグDTRと、裏面部21rで人差し指を右方向に滑らせる右方向ドラッグDIRとの双方を行う例である。親指及び人差し指の双方を円環状部200rの内周側から外周側へとドラッグすることにより、図12(A)が実現される。親指と人差し指の双方を、図12(A)とは逆方向にドラッグするパターンとしてもよい。
【0055】
図12(B)は、正面部21fで親指を左方向に滑らせる左方向ドラッグDTLと、裏面部21rで人差し指を右方向に滑らせる右方向ドラッグDIRとの双方を行う例である。親指を円環状部200rの外周側から内周側へとドラッグし、人差し指を円環状部200rの内周側から外周側へとドラッグすることにより、図12(B)が実現される。図12(C)は、正面部21fで親指を右方向に滑らせる右方向ドラッグDTRと、裏面部21rで人差し指を左方向に滑らせる左方向ドラッグDILとの双方を行う例である。親指を円環状部200rの内周側から外周側へとドラッグし、人差し指を円環状部200rの外周側から内周側へとドラッグすることにより、図12(C)が実現される。
【0056】
図12(D)は、正面部21fで親指を上方向に滑らせる上方向ドラッグDTUと、裏面部21rで人差し指を下方向に滑らせる下方向ドラッグDIDとの双方を行う例である。親指を下方向、人差し指を上方向にドラッグとするパターンとしてもよく、親指と人差し指の双方を上方向または下方向にドラッグするパターンとしてもよい。ここでは、正面部21fに対する親指による入力操作と裏面部21rに対する人差し指による入力操作とを組み合わせた種々のパターンを示したが、入力操作のしやすさを考慮して適宜選択すればよい。
【0057】
図12(A)〜(D)に示すように、親指による入力操作と人差し指による入力操作とを組み合わせたパターンを、操作対象装置を制御するための特定の入力操作とすれば、さらに大幅に誤操作を低減させることが可能となる。
【0058】
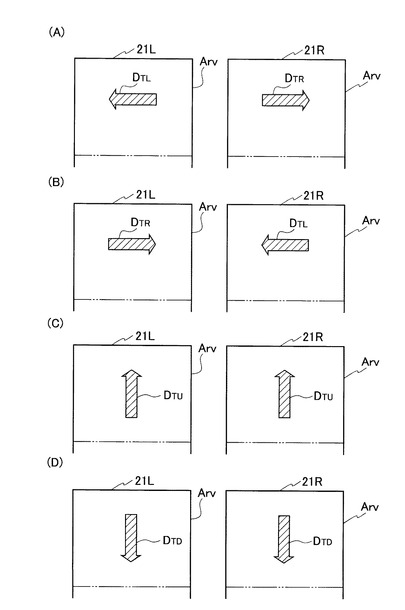
さらには、図3(A),(B),(D),(E)や図4,図5のように、左右の手でタッチセンサ21(21a,21b)を操作できる場合に、左右の手による操作を組み合わせたパターンを、操作対象装置を制御するための特定の入力操作とすることも可能である。図13(A)〜(D)は、図3(B)における左側のタッチセンサ21を左側タッチセンサ21Lとし、右側のタッチセンサ21を右側タッチセンサ21Rとした場合の、左右の手による操作を組み合わせたパターンの例を示している。ここでは、親指によって操作する図12の正面部21fに相当する面を模式的な平面で示している。
【0059】
図13(A)は、左側タッチセンサ21Lに対して親指を左方向に滑らせる左方向ドラッグDTLと、右側タッチセンサ21Rに対して親指を右方向に滑らせる右方向ドラッグDTRとを組み合わせたパターンである。図13(B)は、左側タッチセンサ21Lに対して親指を右方向に滑らせる右方向ドラッグDTRと、右側タッチセンサ21Rに対して親指を左方向に滑らせる左方向ドラッグDTLとを組み合わせたパターンである。
【0060】
図13(C)は、左側タッチセンサ21Lと右側タッチセンサ21Rの双方に対して、親指を上方向に滑らせる上方向ドラッグDTUを組み合わせたパターンである。図13(D)は、左側タッチセンサ21Lと右側タッチセンサ21Rの双方に対して、親指を下方向に滑らせる下方向ドラッグDTDを組み合わせたパターンである。
【0061】
左右の手による入力操作を組み合わせたパターンを、操作対象装置を制御するための特定の入力操作とすれば、運転者は円環状部200rを両手で握ることになるので、安全運転に寄与することが可能である。特に、図3(B)の例は、円環状部200rを両手で握る最も適切な位置にタッチセンサ21を装着しているので、安全運転に寄与する点で最も好ましい。両手で左右のタッチセンサ21を握っている場合に入力操作を受け付けるようにしてもよい。片手がタッチセンサ21から離れた場合に入力操作を受け付けない状態としてもよい。片手がタッチセンサ21から離れた場合には入力操作を受け付ける状態を継続してもよい。片手のみの特定の入力操作を用いる場合であっても、両手で左右のタッチセンサ21を握っている場合に入力操作を受け付けるようにすれば、安全運転に寄与する。
【0062】
運転者が通常の運転のために円環状部200rを握っていて、操作対象装置を操作しようとする意思がない場合に、偶然に、親指による入力操作と人差し指による入力操作とを組み合わせた特定のパターンや、左右の手による入力操作を組み合わせた特定のパターンになってしまう可能性は比較的低いと考えられる。そこで、親指による入力操作と人差し指による入力操作とを組み合わせた特定のパターンや、左右の手による入力操作を組み合わせた特定のパターンのみを用いる場合には、上述した誤操作を回避するための工夫の一部または全てを省略してもよい。勿論、左右の手による入力操作を組み合わせた特定のパターンのみを用いる場合であっても、上述した誤操作を回避するための工夫を併せて採用することが好ましい。
【0063】
記憶部18は、以上説明した特定の入力操作または特定の入力操作を組み合わせたパターンと、操作対象装置に対する制御の種別とを対応させたテーブルを記憶している。制御部10は、記憶部18に記憶されたテーブルに従って、タッチセンサ21に入力された操作に応じて操作対象装置を制御する。記憶部18を制御部10内に設けてもよい。
【0064】
図14のフローチャートを用いて、本実施形態において制御部10で実行される処理について改めて説明する。図13において、制御部10は、ステップS1にて、センサデータ生成部22から出力されるセンサデータを取得する。制御部10は、ステップS2にて、検出部10aによる検出出力に基づいて、円環状部200rが握られているか否かを判定する。円環状部200rが握られていると判定されれば(YES)、制御部10は、ステップS3に処理を移し、円環状部200rが握られていると判定されなければ(NO)、制御部10は、ステップS1に処理を戻す。
【0065】
制御部10は、ステップS3にて、検出部10aによる検出出力に基づいて、入力操作があったか否かを判定する。入力操作があったと判定されれば(YES)、制御部10は、ステップS4に処理を移し、操作入力があったと判定されなければ(NO)、制御部10は、ステップS1に処理を戻す。制御部10は、ステップS4にて、ステップS3における入力操作によって操作対象装置に対する操作を許可するか否かを判定する。操作を許可すると判定されれば(YES)、制御部10は、ステップS5に処理を移し、操作を許可すると判定されなければ(NO)、制御部10は、ステップS1に処理を戻す。
【0066】
上述のように、制御部10は、操作検出エリアArv内で特定の入力操作がなされた場合に操作対象装置に対する操作を許可し、操作無効エリアAriv内で特定の入力操作がなされたとしても操作対象装置に対する操作を許可しない。また、制御部10は、操作検出エリアArv内で何らかの入力操作がなされたとしても、上述した特定の入力操作でない場合は操作対象装置に対する操作を許可せず、特定の入力操作がなされた場合のみ操作対象装置に対する操作を許可する。
【0067】
制御部10は、ステップS5にて、入力操作に基づいた操作を確定し、ステップS6にて、操作対象装置に対して、確定した操作に応じた制御を実行して、ステップS1に処理を戻す。
【0068】
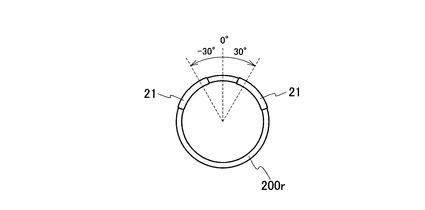
また、ステップS4では、車両が特定の状態にあるときに、操作対象装置に対する制御を許可しないようにする(即ち、無効にする)ことが好ましい。制御部10には、操作対象装置に対する制御を許可するか否かを判断するためのステアリングホイール200の回転角度が設定されている。図15に示すように、ステアリングホイール200を回転させていない状態を回転角度0°とし、例えば右方向に回転させたときをプラス、左方向に回転させたときをマイナスとして、一例として回転角度±30°の範囲でタッチセンサ21に対する入力操作を有効として許可し、回転角度が±30°を超えたらタッチセンサ21に対する入力操作を無効として不許可とする。
【0069】
回転角度が±30°を超えた場合には、車両は右折または左折をしていたり、コーナリング走行していたりする特定の状態である。このような特定の状態で操作対象装置を制御しようとすれば誤操作が発生する可能性が高い。言い換えれば、このような特定の状態における操作入力は、ユーザの意図していない操作入力である可能性が高い。また安全性の上でも好ましくない。そこで、本実施形態では、車両が特定の状態にあるときには、操作対象装置に対する制御を無効とする。
【0070】
前述のように、制御部10にはステアリング角センサ31によって検出されたステアリングホイール200の回転角度が入力される。制御部10は、ステアリング角センサ31によって検出されたステアリングホイール200の回転角度に応じて、タッチセンサ21に対する入力操作を有効とする状態と無効とする状態とを切り換える。制御部10には方向指示器センサ32からの検出信号も入力される。そこで、制御部10は、方向指示器センサ32からの検出信号によって方向指示器320が操作された場合に、タッチセンサ21に対する入力操作を無効としてもよい。方向指示器320が操作された場合は、ステアリングホイール200が所定の回転角度を超えて回転される特定の状態になるとみなすことができる。なお、方向指示器320が右折または左折の合図以外の操作を兼用している場合があるが、ここでの方向指示器320の操作とは右折または左折の合図を行う操作である。
【0071】
さらに、車両を後退させている最中にタッチセンサ21に対して特定の入力操作を行って操作対象装置を制御することは好ましくない。誤操作が発生する可能性が高く、安全性の上でも好ましくない。そこで、制御部10は、シフトレバーセンサ33からの検出信号によって、シフトレバー330のシフト位置がリバースとなった場合にも、タッチセンサ21に対する入力操作を無効とすることが好ましい。ステアリングホイール200の回転角度が例えば±30°の所定角度を超えた場合、または、方向指示器320が操作された場合に加えて、シフトレバー330のシフト位置がリバースとなった場合に操作対象装置に対する制御を無効とすることが好ましいが、一方のみとしてもよい。
【0072】
なお、操作対象装置に対する制御を無効にするとは、仮に上述した特定の入力操作がなされたとしても特定の入力操作を無効として操作対象装置に対する制御を不許可とすることであってもよく、制御部10に対してセンサデータ生成部22から何らかのセンサデータが入力されても、制御部10がセンサデータを無効することであってもよい。結果として、操作対象装置に対する制御を無効とすればよい。
【0073】
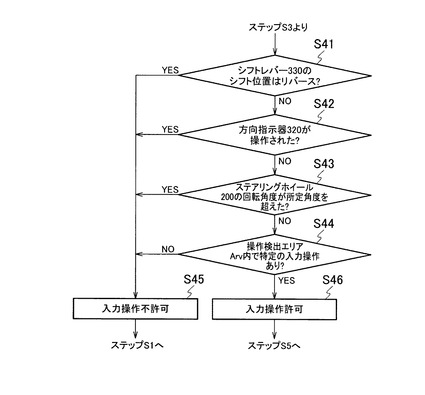
図16のフローチャートを用いて、図14のステップS4の具体的な処理の例を説明する。図16において、制御部10は、ステップS41にて、シフトレバー330のシフト位置がリバースであるか否かを判定する。シフト位置がリバースであれば(YES)、制御部10は、ステップS45にて、ステップS3での入力操作を不許可として、図14のステップS1に移行させる。シフト位置がリバースでなければ(NO)、制御部10は、ステップS42にて、方向指示器320が操作されたか否かを判定する。方向指示器320が操作されたら(YES)、制御部10は、ステップS45にて、ステップS3での入力操作を不許可として、図14のステップS1に移行させる。
【0074】
方向指示器320が操作されなかったら(NO)、制御部10は、ステップS43にて、ステアリングホイール200の回転角度が所定角度を超えたか否かを判定する。ステアリングホイール200の回転角度が所定角度を超えたら(YES)、制御部10は、ステップS45にて、ステップS3での入力操作を不許可として、図14のステップS1に移行させる。ステアリングホイール200の回転角度が所定角度を超えていなかったら(NO)、制御部10は、ステップS44にて、操作検出エリアArv内で特定の入力操作がなされたか否かを判定する。特定の入力操作がなされなかったら(NO)、制御部10は、ステップS45にて、ステップS3での入力操作を不許可として、図14のステップS1に移行させる。ステップS45にて、入力操作を不許可とすれば、操作対象装置に対する制御が無効となる。特定の入力操作がなされたら(YES)、制御部10は、ステップS46にて、ステップS3での入力操作を許可して、図14のステップS5に移行させる。
【0075】
図16に示す例では、ステップS41,S42,S43の全てを設けたが、これらのステップの内の1つまたは2つのみとしてもよい。また、ステップS41,S42,S43の全てまたはこれらのステップの内の2つを設ける場合、順番は任意である。なお、ここではシフトレバー330と称したが、車両の直進と後退の切り換え、変速機の変速比を変える操作部の形状は任意であり、フロアシフト,コラムシフト,パドルシフト等のいずれでもよい。これらは全てシフトレバーに含まれる。
【0076】
以上のように、車両が右折,左折,コーナリング走行,後退等の特定の状態にあるときに、操作対象装置に対する制御を無効とすれば、運転者はこれらの特定の状態のときにタッチセンサ21に対する入力操作を行わない。従って、安全性の向上に寄与する。
【0077】
本実施形態による動作をまとめると、次の通りである。検出部10a(第1の検出部)は、ステアリングホイール200,201における運転者が握る握持部(円環状部200rまたは直線部201s)に装着されたタッチセンサ21における第1のエリアが触られている状態であることを検出する。第1のエリアの例は、グリップ検出エリアArgである。検出部10a(第2の検出部)は、第1のエリアが触られている状態で、タッチセンサ21における第1のエリアよりも上側に位置する第2のエリアに対して特定の入力操作がなされたことを検出する。第2のエリアの例は、操作検出エリアArvである。運転時、親指または人差し指は手のひらよりも上方に位置するので、第1のエリアよりも上側を第2のエリアとすればよい。そして、第1のエリアが触られている状態であり、特定の入力操作がなされたら、タッチセンサ21によって操作する対象の操作対象装置を特定の入力操作に応じて制御する。
【0078】
上側に位置するエリアとは、ステアリングホイール200を回転させていない状態で運転者が握持部を握った状態で、第1のエリアよりも上側に位置するエリアである。第1のエリアが所定の面積以上触られていることを検出した場合に、第1のエリアが触られている状態であるとすることが好ましい。
【0079】
また、別の観点では、次の通りである。検出部10a(第1の検出部)は、ステアリングホイール200,201における運転者が握る握持部(円環状部200rまたは直線部201s)の所定の範囲に、握持部を覆うように装着されたタッチセンサ21が、タッチセンサ21上の第1のエリアにおいて、握持部をステアリングホイール200,201の径方向に切断したときの断面における周方向の所定角度以上触られている状態であることを検出する。検出部10a(第2の検出部)は、第1のエリアが所定角度以上触られている状態で、タッチセンサ21における第1のエリアとは異なる第2のエリアに対して特定の入力操作がなされたことを検出する。第1のエリアが前記所定角度以上触られている状態であり、特定の入力操作がなされたら、タッチセンサ21によって操作する対象の操作対象装置を特定の入力操作に応じて制御する。
【0080】
第2のエリアは、第1のエリアよりも上側に位置するエリアであることが好ましい。上側に位置するエリアとは、ステアリングホイール200を回転させていない状態で運転者が握持部を握った状態で、第1のエリアよりも上側に位置するエリアである。
【0081】
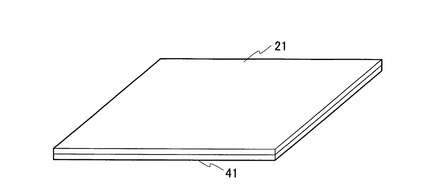
図17及び図18は、タッチセンサ21を操作したことを運転者に効果的に知らせるための構成例を示している。図17及び図18は、図9と同様、タッチセンサ21を展開して矩形状に変換した模式図である。図17は、タッチセンサ21の下面側に発色物質を含む色変化シート41を設けた例である。タッチセンサ21に透明導電膜を用いることにより、運転者は、タッチセンサ21を介して、タッチセンサ21の下面に配置されている色変化シート41の色を見ることができる。制御部10による制御によって、タッチセンサ21を触った部分の色変化シート41の色を変化させることにより、運転者はタッチセンサ21を操作したことを認識することができる。
【0082】
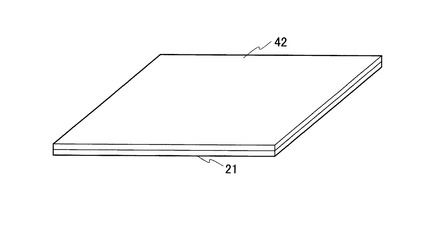
図18は、タッチセンサ21の上面側に触覚(手触り)を変化させる触覚フィードバックシート42を設けた例である。触覚フィードバックシート42としては、例えば、フィンランドのSenseg社が開発した“E-Sense”と称されるシートを採用することができる。このシートは、フィルムを帯電させることで触覚のフィードバックを実現するものである。タッチセンサ21の上面側に触覚フィードバックシート42を設けても、タッチセンサ21は指等の接触を検出することが可能である。触覚フィードバックシート42を介してタッチセンサ21を操作した場合に、制御部10による制御によって、触覚フィードバックシート42の触覚を変化させることにより、運転者はタッチセンサ21を操作したことを認識することができる。
【0083】
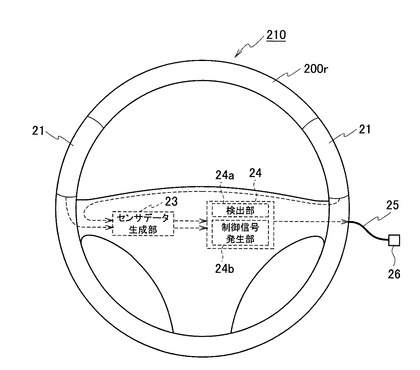
次に、図19を用いてステアリングホイールの構成例について説明する。図19に示すステアリングホイール210は、操作対象装置に対する制御信号をステアリングホイール210から出力させるように構成したものである。図19において、図1,図2と同一部分には同一符号を付し、その説明を適宜省略する。図19に示すように、ステアリングホイール210は、例えば円環状部200r以外の部分に、図1のセンサデータ生成部22と同様のセンダデータ生成部23と、制御部10と同様の制御部24を備えている。制御部24は、検出部10aと同様の検出部24aと、制御信号発生部24bを有する。
【0084】
ステアリングホイール210を車両に装着した場合、制御信号発生部24bは、タッチセンサ21に対する特定の入力操作に応じて、操作対象装置を制御するための制御信号を発生する。制御信号発生部24bより出力された制御信号はケーブル25を介して出力端子26へと出力される。出力端子26を操作対象装置に接続すれば、制御信号によって操作対象装置を制御することが可能となる。特定の入力操作の例は図11〜図13と同様である。制御信号発生部24bが制御信号を発生する要件も上述と同様である。
【0085】
本発明は以上説明した本実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々変更可能である。タッチセンサ21を、面ファスナを用いて円環状部200rに着脱自在に装着するようにしてもよい。円環状部200rを握持部としたが、握持部は必ずしも円環状でなくてもよい。
【0086】
タッチセンサ21は1枚のシートによって構成する必要はなく、複数のタッチセンサの片によってタッチセンサ21を構成してもよい。複数のタッチセンサの片によってタッチセンサ21を構成すれば、一つ一つのタッチセンサの片の形状を簡単な形にすることができるため、タッチセンサを生産する際に有利である。なお、複数のタッチセンサの片によってタッチセンサ21を構成する場合、必ずしもタッチセンサの片を隙間なく配置しなくてもよい。本実施形態のタッチパネル21は、握持部を覆うように装着されているが、本実施形態における、握持部を覆うように装着されているということは、複数のタッチセンサの片からなるタッチセンサ21が、タッチセンサの片と片との間に隙間がある状態で、握持部を覆うように装着されていることも含むものとする。
【0087】
さらには、タッチセンサ21を設ける範囲を、運転者が運転時に握る握持部(円環状部200rまたは直線部201s)に限定せず、例えばエアバッグ等が収納されるセンター部と円環状部200rとの間を連結する連結部の表面まで広げてもよい。連結部は、図2においては、図2に示す状態で左右の手の間に位置する部分であり、図19においては、センサデータ生成部23及び制御部24が設けられている部分である。このようにタッチセンサ21を連結部の表面まで広げて、連結部における握持部に近い位置に操作検出エリアArvを設定してもよい。握持部に近い位置であれば、運転者が運転時に握持部から手を離したり、手を大きくずらしたりすることなく操作対象装置を操作することができる。よって、タッチセンサ21を連結部の表面まで広げた構成としても、運転者がステアリングホイール200,201,210を操作する際に支障となる可能性はほとんどない。
【符号の説明】
【0088】
10,24 制御部
10a,24a 検出部
11 ナビゲーション処理部
12 オーディオ再生部
13 テレビジョンチューナ
14 映像信号処理部
15 映像表示部
16 音声信号処理部
17 表示素子
18 記憶部
20 スピーカ
21 タッチセンサ
22,23 センサデータ生成部
24b 制御信号発生部
25 ケーブル
26 出力端子
31 ステアリング角センサ
32 方向指示器センサ
33 シフトレバーセンサ
34 車内通信部
200,201,210 ステアリングホイール
200r 円環状部(握持部)
201s 直線部(握持部)
【技術分野】
【0001】
本発明は、車両に搭載されているナビゲーション装置等の車載機器、または、変速機や方向指示器等の車両の動作を制御する車両動作制御装置を操作対象装置とし、操作対象装置を制御する制御装置及び制御方法に関する。
【背景技術】
【0002】
車両に搭載されているナビゲーション装置等の車載機器を操作するための操作スイッチをステアリングホイールに配置した車両が普及している(特許文献1参照)。操作スイッチをステアリングホイールに配置すれば、運転者は車載機器を操作する際に車載機器まで手を伸ばす必要がないので、操作性が向上する。特許文献1に記載されているように、操作スイッチは、実際には、運転者が手で握る握持部であるステアリングホイールの円環状部ではなく、エアバッグが収納されているセンター部と円環状部との間を連結する連結部に配置されるのが通常である。従って、運転者は、操作スイッチを操作するために、握っている円環状部から手を離したり、手を大きくずらしたりする必要がある。特許文献2には、円環状部の背面や内側側面に操作スイッチを配置することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−106353号公報
【特許文献2】特開2005−348123号公報
【特許文献3】特開2008−195220号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献2に記載の発明によれば、円環状部に操作スイッチを配置しているので、円環状部から手を離したり、手を大きくずらしたりすることなく、操作スイッチを操作することができる。しかしながら、特許文献2に記載されている操作スイッチは押しボタンによるキーや凹凸を設けたキーであり、この種のキーは運転者がステアリングホイールを操作する際の支障となる可能性がある。運転者が握る円環状部に大きな凹凸を設けることは好ましくない。また、円環状部に操作スイッチのような操作部を配置した場合、運転者が通常の運転のために円環状部を握っている場合のように、操作対象装置を操作しようとする意思がない場合に、不用意に操作対象装置が操作されないようにすることが求められる。さらに、車両の状態によっては誤操作を招く場合があり、誤操作を極力少なくすることが求められる。
【0005】
本発明はこのような要望に対応するため、握持部から手を離したり、手を大きくずらしたりすることなく操作対象装置を操作することができ、運転者がステアリングホイールを操作する際に支障となる可能性を大幅に低減させることができる車両における操作対象装置の制御装置及び制御方法を提供することを目的とする。また、誤操作を大幅に低減させることができる車両における操作対象装置の制御装置及び制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上述した従来の技術の課題を解決するため、複数の検出領域を有し、車両のステアリングホイール(200,201)における運転者が握る握持部(200r,201s)の所定の範囲に、前記握持部を覆うように装着されたタッチセンサ(21)から得られる接触検出信号に基づいて、どの検出領域が触られているかを示す位置データを含むセンサデータを生成するセンサデータ生成部(22)と、前記センサデータに基づいて、運転者が前記握持部を握っているか否か、及び、前記タッチセンサに対する入力操作を検出する検出部(10a)と、前記検出部によって運転者が前記握持部を握っていることが検出され、かつ、前記タッチセンサに対して特定の入力操作が行われたことが検出された場合に、前記特定の入力操作に応じて、前記タッチセンサによって操作する対象の操作対象装置を制御する制御部(10)とを備え、前記制御部は、車両が特定の状態にあるときに、前記操作対象装置の制御を無効とすることを特徴とする車両における操作対象装置の制御装置を提供する。
【0007】
上記の車両における操作対象装置の制御装置において、前記制御部は、前記ステアリングホイールの回転角度が所定の角度を超えたとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることが好ましい。また、前記制御部は、方向指示器が操作されたとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることが好ましい。さらに、前記制御部は、シフトレバーのシフト位置がリバースとなったとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることが好ましい。
【0008】
上記の車両における操作対象装置の制御装置において、前記タッチセンサには、前記複数の検出領域の一部を含み、運転者の手のひらの接触を検出するグリップ検出エリア(Arg)と、前記複数の検出領域の他の一部を含み、指の接触による前記特定の入力操作を検出する操作検出エリア(Arv)とが設定されており、前記検出部は、前記グリップ検出エリアから得られる接触検出信号に基づくセンサデータによって運転者が前記握持部を握っているか否かを検出し、前記操作検出エリアから得られる接触検出信号に基づくセンサデータによって前記特定の入力操作を検出することが好ましい。
【0009】
上記の車両における操作対象装置の制御装置において、前記制御部は、前記特定の入力操作として、前記操作検出エリアに対して、前記握持部を前記ステアリングホイールの径方向に切断したときの断面における周方向に離間した2箇所を2つの指によって操作したパターンに応じて、前記操作対象装置を制御することが好ましい。
【0010】
上記の車両における操作対象装置の制御装置において、前記タッチセンサは、運転者が左手で握る握持部の所定の範囲に装着された第1のタッチセンサ(21L)と右手で握る握持部の所定の範囲に装着された第2のタッチセンサ(21R)とを含み、前記制御部は、前記特定の入力操作として、前記第1のタッチセンサに対する第1の入力操作と前記第2のタッチセンサに対する第2の入力操作との組み合わせによるパターンに応じて、前記操作対象装置を制御することが好ましい。
【0011】
また、本発明は、上述した従来の技術の課題を解決するため、複数の検出領域を有し、車両のステアリングホイール(200,201)における運転者が握る握持部(200r,201s)の所定の範囲に、前記握持部を覆うように装着されたタッチセンサ(21)を運転者が握っているか否かを検出し、前記タッチセンサに対して特定の入力操作が行われたか否かを検出し、車両が特定の状態にあるか否かを検出し、車両が特定の状態にはないことが検出され、運転者が前記タッチセンサを握っていることが検出され、かつ、前記特定の入力操作が行われたことが検出された場合に、前記タッチセンサによって操作する対象の操作対象装置を制御することを特徴とする車両における操作対象装置の制御方法を提供する。
【0012】
上記の車両における操作対象装置の制御方法において、前記ステアリングホイールの回転角度が所定の角度を超えたとき車両が特定の状態にあるにあるとして、前記操作対象装置の制御を無効とすることが好ましい。また、方向指示器が操作されたとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることが好ましい。さらに、シフトレバーのシフト位置がリバースとなったとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることが好ましい。
【0013】
上記の車両における操作対象装置の制御方法において、前記タッチセンサには、前記複数の検出領域の一部を含み、運転者の手のひらの接触を検出するグリップ検出エリア(Arg)と、前記複数の検出領域の他の一部を含み、指の接触による前記特定の操作を検出する操作検出エリア(Arv)とが設定されており、前記グリップ検出エリアに対する手のひらの接触によって、運転者が前記タッチセンサを握っていることを検出し、前記操作検出エリアに対する指の接触によって、前記特定の入力操作が行われたことを検出することが好ましい。
【0014】
上記の車両における操作対象装置の制御方法において、前記特定の入力操作として、前記操作検出エリアに対して、前記握持部を前記ステアリングホイールの径方向に切断したときの断面における周方向に離間した2箇所を2つの指によって操作したパターンに応じて、前記操作対象装置を制御することが好ましい。
【0015】
上記の車両における操作対象装置の制御方法において、前記タッチセンサは、運転者が左手で握る握持部の所定の範囲に装着された第1のタッチセンサ(21L)と右手で握る握持部の所定の範囲に装着された第2のタッチセンサ(21R)とを含み、前記特定の入力操作として、前記第1のタッチセンサに対する第1の入力操作と前記第2のタッチセンサに対する第2の入力操作との組み合わせによるパターンに応じて、前記操作対象装置を制御することが好ましい。
【発明の効果】
【0016】
本発明の車両における操作対象装置の制御装置及び制御方法によれば、握持部から手を離したり、手を大きくずらしたりすることなく操作対象装置を操作することができ、運転者がステアリングホイールを操作する際に支障となる可能性を大幅に低減させることができる。また、誤操作を大幅に低減させることができる。
【図面の簡単な説明】
【0017】
【図1】本発明の車両における操作対象装置の制御装置の一実施形態を示すブロック図である。
【図2】一実施形態の操作対象装置の制御装置を備える車両の例を示す部分平面図である。
【図3】一実施形態におけるタッチセンサをステアリングホイールに装着する位置及び範囲の例を示す図である。
【図4】一実施形態におけるタッチセンサをステアリングホイールに装着する位置及び範囲の他の例を示す図である。
【図5】タッチセンサを変形ステアリングホイールに装着する例を示す図である。
【図6】ステアリングホイールにおけるタッチセンサの部分を握っている状態でセンサデータが得られる部分の例を示す部分斜視図である。
【図7】タッチセンサにおける断面周方向の座標を示す断面図である。
【図8】図6に示すタッチセンサを展開した状態を示す平面図である。
【図9】図8に示す各領域を均等の大きさに変換した状態を示す模式図である。
【図10】ステアリングホイールにおけるタッチセンサの部分を握っていると判定するための要件の例を示す図である。
【図11】タッチセンサに対する特定の入力操作の例を示す模式図である。
【図12】タッチセンサに対する特定の入力操作の他の例を示す模式図である。
【図13】タッチセンサに対する特定の入力操作のさらに他の例を示す模式図である。
【図14】一実施形態の動作を説明するためのフローチャートである。
【図15】ステアリングホイールの回転角度を説明するための図である。
【図16】図14のステップS4の具体的な処理の例を示すフローチャートである。
【図17】タッチセンサを操作した際に色を変化させるための構成例を示す模式的な斜視図である。
【図18】タッチセンサを操作した際に触覚を変化させるための構成例を示す模式的な斜視図である。
【図19】ステアリングホイールの構成例を示す平面図である。
【発明を実施するための形態】
【0018】
以下、本発明の車両における操作対象装置の制御装置及び制御方法の一実施形態について、添付図面を参照して説明する。図1,図2において、車載機器100は、車両のダッシュボード内に装着されている。図1に示す例では、車載機器100は、制御部10,ナビゲーション処理部11,オーディオ再生部12,テレビジョン(TV)チューナ13,映像信号処理部14,映像表示部15,音声信号処理部16,表示素子17,記憶部18を備えている。制御部10は検出部10aを含む。
【0019】
ナビゲーション処理部11は地図データを保持する記憶部とGPSアンテナ等を有しており、制御部10とナビゲーション処理部11とが協同して経路案内を行う。オーディオ再生部12は、制御部10による制御に従って、例えばコンパクトディスク等の光ディスクや半導体メモリに記録されているオーディオ信号を再生する。TVチューナ13は、制御部10による制御に従って、所定の放送局のTV放送波信号を受信する。ナビゲーション処理部11またはTVチューナ13より出力された映像信号は、制御部10を介して映像信号処理部14に入力されて処理され、液晶パネル等の映像表示部15に表示される。
【0020】
ナビゲーション処理部11,オーディオ再生部12,TVチューナ13より出力された音声信号は、制御部10を介して音声信号処理部16に入力されて処理され、外部のスピーカ20にて発音される。音声信号処理部16は増幅部を含む。スピーカ20は、車両のドアの内部等に設置されている。表示素子17は例えば発光ダイオード(LED)であり、制御部10による制御に従って、後述するタッチセンサ21の接触状態に応じて点灯または消灯する。表示素子17は、運転者から視認できるように、例えば車載機器100の筐体に配置する。表示素子17を車載機器100から離して、車両のステアリングホイール200の近傍に配置してもよい。記憶部18は不揮発性のメモリである。
【0021】
図2に示すように、操作部であるタッチセンサ21は、ステアリングホイール200の円環状部200rに装着されている。円環状部200rは、運転者が運転の際に握る部分である握持部である。図2に示す例では、タッチセンサ21は、円環状部200rにおける左右それぞれの所定の角度範囲に装着されている。タッチセンサ21は、複数箇所の接触を検出することができる、いわゆる多点検出(マルチタッチ)のタッチセンサである。タッチセンサ21は、円環状部200rの径方向の断面の周上に、360°の範囲で装着することが好ましい。360°未満の範囲であっても、実質的に円環状部200rの断面の周のほぼ全体を覆っていればよい。
【0022】
運転者は、円環状部200rのタッチセンサ21が装着された部分を握っている。図1において、タッチセンサ21の出力はセンサデータ生成部22に入力される。タッチセンサ21を手で触ると、接触検出信号がセンサデータ生成部22へと入力される。センサデータ生成部22は、入力された接触検出信号に基づいて、タッチセンサ21のどの位置から接触検出信号が得られたかを示す位置データを含むセンサデータを生成して制御部10に供給する。タッチセンサ21とセンサデータ生成部22とを一体化してもよいし、センサデータ生成部22を制御部10内に設けてもよい。
【0023】
タッチセンサ21としては、例えば投影式静電容量(相互キャパシタンス)方式のタッチセンサを用いることができる。円環状部200rに装着するタッチセンサ21としては、一例として、ミクロ技術研究所が開発した可撓性を有するタッチパネルを採用することができる。この可撓性を有するタッチパネルは、センサ部を0.02〜0.05mmの板厚を有する超薄板ガラスとし、超薄板ガラスとPET(ポリエチレンテレフタレート)フィルムとを貼り合わせた構造になっている。円環状部200rにタッチセンサ21を装着しても、タッチセンサ21は手や指で知覚できるほどの凹凸を有さないので、運転者がステアリングホイール200を操作する際に支障となることはほとんどない。
【0024】
図2に破線にて示すように、タッチセンサ21と車載機器100とを結ぶ電線を、ステアリングホイール200及びダッシュボードの内部を通して配線することが好ましい。
【0025】
図1,図2において、ステアリング角センサ31は、ステアリングホイール200の回転角度を検出する。方向指示器センサ32は、方向指示器320の操作を検出する。シフトレバーセンサ33は、シフトレバー330によるシフト位置がどこにあるかを検出する。ステアリング角センサ31,方向指示器センサ32,シフトレバーセンサ33の各検出信号は、車内通信部34を介して制御部10へと供給される。
【0026】
図3を用いて、タッチセンサ21をステアリングホイール200の円環状部200rに装着する位置及び範囲の例について説明する。なお、上、下、右、左とは、ステアリングホイール200を回転させていない状態(車両が直進する状態)において、運転者の位置からステアリングホイール200を見たときの上、下、右、左であるとする。図3(A)は、円環状部200rの全周にタッチセンサ21を装着した例である。図3(B)は、図2と同様であり、円環状部200rにおける上方で左右それぞれの所定の角度範囲にタッチセンサ21を互いに離間させて装着した例である。図3(C)は、円環状部200rにおける上方で右側のみの所定の角度範囲にタッチセンサ21を装着した例である。
【0027】
図3(D)は、円環状部200rにおける下方で左右それぞれの所定の角度範囲にタッチセンサ21を互いに離間させて装着した例である。図3(E)は、円環状部200rにおける頂部を含む上方の比較的広い角度範囲にタッチセンサ21を装着した例である。図3(E)は図3(B)における左右のタッチセンサ21を連結したものに相当する。
【0028】
図4は、図3(B)における左右のタッチセンサ21を、上側のタッチセンサ21aと下側のタッチセンサ21bとに分割した例である。図4の例では、上側のタッチセンサ21aは手の人差し指と親指による接触を検出し、下側のタッチセンサ21bは主として手のひら,中指,薬指による接触を検出する。図5は、円形ではない変形ステアリングホイール201にタッチセンサ21を装着した例である。タッチセンサ21は、変形ステアリングホイール201の左右の直線部201sに装着されている。運転者は握持部である直線部201sを握って運転し、タッチセンサ21が手のひらや指による接触を検出する。
【0029】
ここで、図2に示すように、タッチセンサ21が円環状部200rにおける上方で左右に装着されており、運転者がタッチセンサ21の部分を握っている場合に、タッチセンサ21によって手のひらや指の接触がどのように検出されるかについて説明する。図6は、図2の右側のタッチセンサ21を運転者が握った場合に、手のひらと指が接触している範囲の例を示している。運転者が円環状部200rを手で握る握り方、手の大きさは一様ではなく、図6は単なる例である。
【0030】
図6に示す例では、ハッチングを付したTpで示す複数の検出領域Rが手のひらの接触を検出している部分であり、ハッチングを付したTtで示す複数の検出領域Rが親指の接触を検出している部分である。以下、手のひら接触検出部Tp、親指接触検出部Ttと称することとする。図6では見えていない車両の進行方向側であるタッチセンサ21の裏面側には、人差し指が接触する。
【0031】
図6に示すように、タッチセンサ21は手のひらや指の接触を検出する検出部分として複数の検出領域Rを有している。タッチセンサ21の各検出領域Rには座標が設定されている。図6に示すように、円環状部200rの周方向において、タッチセンサ21の下端部に位置している検出領域Rを座標0とし、上端部に位置している検出領域Rまで1,2,…,30,31と周方向の座標を設定している。タッチセンサ21における円環状部200rの周方向の座標をY座標とする。
【0032】
図7は、タッチセンサ21を装着している部分で円環状部200rの径方向に円環状部200rを切断した断面図である。図7に示すように、円環状部200rの断面において、例えば円環状部200rの内径側に位置している検出領域Rを座標0とする。断面における周方向のそれぞれの検出領域Rに、円環状部200rの内径側から正面側、正面側から外径側、外径側から裏面側、裏面側から内径側へと図7の反時計方向に1,2,…,21,22と座標を設定している。タッチセンサ21における断面の周方向の座標をX座標とする。センサデータ生成部22は、接触検出信号が得られた検出領域RのX座標,Y座標によって運転者がタッチセンサ21のどこを触っているかを示す位置データを得ることができる。
【0033】
図6に示すタッチセンサ21を展開すると、図8のようになる。図8に示すタッチセンサ21の各領域を均等の大きさに変換した状態を模式的に示すと、図9のようになる。図8,図9においては、手のひら接触検出部Tpと親指接触検出部Ttに加えて、人差し指が接触している複数の検出領域Rである人差し指接触検出部Tiも示している。なお、タッチセンサ21に中指や薬指または小指が接触すれば、タッチセンサ21はそれらの指の接触も検出する。本実施形態においては、運転者が、タッチセンサ21上で特定の入力操作を行うのに好適な親指または人差し指を操作のための指として用いることとする。
【0034】
親指または人差し指による入力操作の詳細については後に詳述することとする。制御部10の検出部10aは、センサデータ生成部22から出力されるセンサデータに基づいて、親指または人差し指によってタッチセンサ21上で入力操作が行われたことを検出する。検出部10aは、センサデータ生成部22から出力されるセンサデータに基づいて、円環状部200r(タッチセンサ21)を握っていることも検出する。制御部10は、タッチセンサ21に対して行った特定の入力操作に応じて操作対象装置を制御する。
【0035】
操作対象装置は一例として車載機器100である。具体的には、制御部10は、特定の入力操作に応じて、ナビゲーション処理部11における経路案内に関する制御を実行させたり、オーディオ再生部12におけるオーディオ信号を再生または停止させたり、再生するトラック(楽曲)を進めたり戻したりすることができる。また、制御部10は、特定の入力操作に応じて、TVチューナ13における受信チャンネルを切り換えたり、音声信号処理部16の増幅部を制御して音量を減少または増加させたりすることができる。
【0036】
操作対象装置の他の例は、車両の動作を制御する車両動作制御装置である。具体的には、制御部10は、車内通信部34を介して、変速機、方向指示器、エアーコンディショナのオン・オフ、エアーコンディショナの設定温度等を制御してもよい。なお、操作対象装置を車両動作制御装置とする場合には、センサデータ生成部22から出力されるセンサデータを車両が有する制御部に入力して、車両動作制御装置を制御することが好ましい。操作対象装置を制御する制御部は、車載機器100内の制御部10であってもよいし、車両に備えられている車載機器100外部の制御部であってもよい。
【0037】
本実施形態によれば、運転者が握る円環状部200rに極めて薄いタッチセンサ21を装着して、タッチセンサ21を操作することによって操作対象装置を操作するので、円環状部200rから手を離したり、手を大きくずらしたりすることなく操作対象装置を操作することができる。また、タッチセンサ21は円環状部200rの表面上で凹凸がないため、運転者がステアリングホイール200を操作する際に支障となる可能性はほとんどない。
【0038】
ところで、運転者が通常の運転のために円環状部200rを握っている場合のように、操作対象装置を操作しようとする意思がない場合に、不用意に操作対象装置が操作されないようにすることが必要となる。そこで、本実施形態においては、運転者が意図しない誤操作を回避するために、次のようにしている。
【0039】
図8,図9に示すように、タッチセンサ21上の複数の検出領域Rに、手のひらの接触を検出するためのグリップ検出エリアArgと、親指または人差し指による操作入力を有効として、操作入力を検出するための操作検出エリアArvと、グリップ検出エリアArgと操作検出エリアArvとの間の中間領域であり、操作入力を無効とする操作無効エリアArivとを設定している。手のひら接触検出部Tpはグリップ検出エリアArg内に位置し、親指接触検出部Tt及び人差し指接触検出部Tiは操作検出エリアArv内に位置する。
【0040】
操作無効エリアArivは、グリップ検出エリアArgと操作検出エリアArvと同様に、手のひらまたは指の接触を検出する検出領域Rを有するものの、制御部10(検出部10a)またはセンサデータ生成部22が操作無効エリアArivからの入力操作を無効とするように処理することによって、操作無効エリアとすることができる。また、操作無効エリアArivの範囲に検出領域Rを設けないようにタッチセンサ21を構成することにより、操作無効エリアとしてもよい。この場合、図4に示す例と実質的に等価である。
【0041】
運転者が通常の運転のために円環状部200rを握っている場合には、手のひら接触検出部Tpと親指接触検出部Tt及び人差し指接触検出部Tiとは比較的近い位置となる。そこで、運転者が単に円環状部200rを握っている場合と、操作対象装置を操作しようとしてタッチセンサ21を触った場合とを的確に区別するために、本実施形態においては、操作無効エリアArivを設けている。運転者は、操作対象装置を操作しようとする場合には、親指や人差し指を意図的に伸ばしてタッチセンサ21を触って、後述する特定の入力操作を行うようにする。制御部10は、操作検出エリアArv内で後述する特定の入力操作が行われた場合に、入力操作に応じて操作対象装置を制御する。
【0042】
運転者が運転のために円環状部200rを握っていない状態で、操作検出エリアArvに不用意に触った場合に、操作対象装置が誤操作されることを回避することも必要である。そこで、本実施形態においては、検出部10aは、グリップ検出エリアArgで所定の面積以上の手のひら接触検出部Tpが得られた場合に、円環状部200rを握っていると判断する。制御部10は、円環状部200rを握っており、かつ、操作検出エリアArv内で特定の操作が行われた場合に操作対象装置を制御するように構成している。円環状部200rを握っていると判断する手のひら接触検出部Tpの面積は、複数の運転者がステアリングホイール200を通常の握り方で握った場合の面積を統計的に調べて、適宜に設定すればよい。
【0043】
グリップ検出エリアArgにおける手のひら接触検出部Tpの面積は、運転者が円環状部200rを握っていると判定するための要件の一例であり、判定するための要件これに限定されるものではない。図10は、タッチセンサ21のグリップ検出エリアArgの部分で円環状部200rを切断した断面を示している。検出部10aは、手のひら接触検出部Tpの断面周方向の角度θが所定の角度以上のときに円環状部200rを握っていると判断することができる。所定の角度は例えば180°である。
【0044】
以上のように、本実施形態においては、運転者が円環状部200r(タッチセンサ21)を握っているか否かを判定して、円環状部200rを握っている場合のみタッチセンサ21に対する操作入力を受け付けるようにしているので、操作検出エリアArvに不用意に触った場合の誤操作を回避することができる。本実施形態においては、好ましい構成として、操作検出エリアArvをグリップ検出エリアArgから所定の距離離間させた位置に設けているので、運転者が意図的にタッチセンサ21に対して特定の入力操作を行っていることを的確に検出することができる。従って、誤操作を大幅に低減させることができる。
【0045】
また、本実施形態においては、グリップ検出エリアArgにおける手のひら接触検出部Tpの面積や断面周方向の角度θを、運転者が円環状部200rを握っているか否かを判定する要件としているので、円環状部200rを握っているか否かを的確に判定することができる。従って、運転者が円環状部200rを握っていない状態で、操作検出エリアArvに不用意に触った場合の誤操作も回避することができる。
【0046】
制御部10は、検出部10aが、グリップ検出エリアArgからの接触検出信号に基づくセンサデータによって運転者が円環状部200r(タッチセンサ21)を握っていることを検出した場合に、運転者に、操作検出エリアArvによる操作入力が可能であることを知らせるために、表示素子17を点灯させる。運転者は、表示素子17の点灯・消灯によって、タッチセンサ21によって操作対象装置を操作することができるか否かを判断することができる。表示素子17をステアリングホイール200の近傍に配置する方が好ましい。
【0047】
ところで、図3(A)のように円環状部200rの全周にタッチセンサ21を装着したり、図3(E)のように比較的広い範囲にタッチセンサ21を装着したりした場合には、運転者がタッチセンサ21を握る位置は固定されない。そこで、図8及び図9で説明したグリップ検出エリアArgと操作検出エリアArvや、必要に応じて設ける操作無効エリアArivの位置は、運転者がタッチセンサ21を握った位置に応じて動的に設定する必要がある。
【0048】
そこで、制御部10は、グリップ検出エリアArg等が未設定の状態でタッチセンサ21が握られた場合には、手のひら接触検出部Tpを含む領域をグリップ検出エリアArgに設定する。手のひら接触検出部Tpを含むY座標の所定の範囲をグリップ検出エリアArgとすればよい。前述のように、手のひら接触検出部Tpは所定の面積以上となるので、タッチセンサ21上の複数の検出領域Rにおいて所定の面積以上触られていることが検出された部分が手のひら接触検出部Tpとなる。または、図10で説明したように、タッチセンサ21の部分で円環状部200rを切断した断面周方向で、所定の角度以上触られていることが検出された部分が手のひら接触検出部Tpとなる。
【0049】
制御部10は、グリップ検出エリアArgを設定したら、グリップ検出エリアArgよりも上側のY座標の所定の範囲を操作検出エリアArvと設定する。この場合、必要に応じて、グリップ検出エリアArgと隣接するY座標の所定の範囲を操作無効エリアArivとして設定し、グリップ検出エリアArgをグリップ検出エリアArgから離間させた位置とする。
【0050】
次に、図11〜図13を用いて、運転者が親指または人差し指を用いてタッチセンサ21に対して行う特定の入力操作の例を説明する。図11(A)〜(E)は、タッチセンサ21の運転者と対向する正面側または裏面側である半分を模式的な平面で示している。図11(A)〜(E)に示す操作は、正面側であれ親指で、裏面側であれば人差し指で行われることになる。図11(A)において、DRは、親指または人差し指をタッチセンサ21(操作検出エリアArv)上で右方向に滑らせる右方向ドラッグであり、DLは親指または人差し指を右方向に滑らせる左方向ドラッグである。DUは親指または人差し指を上方向に滑らせる上方向ドラッグであり、DDは親指または人差し指をした方向に滑らせる下方向ドラッグである。
【0051】
図11(A)において、右方向ドラッグDR,左方向ドラッグDL,上方向ドラッグDU,下方向ドラッグDDの代わりに、親指または人差し指でそれぞれの方向にタッチセンサ21をはじくフリックとしてもよい。
【0052】
図11(B)は、親指または人差し指でタッチセンサ21をたたくタップTを示している。図11(C)は、親指または人差し指でタッチセンサ21上に円弧を描くようにドラッグする円弧ドラッグDCを示している。図11(D)は、親指または人差し指でタッチセンサ21上にジグザグ状にドラッグするジグザグドラッグDZを示している。図11(E)は、親指または人差し指で記号を書くようにドラッグする記号入力ドラッグDSを示している。図11(E)は記号として数字の3を描いた状態を示している。記号としては、認識が比較的容易な数字やアルファベットを用いることが好ましい。
【0053】
図12(A)〜(D)は、タッチセンサ21を開いてタッチセンサ21の正面側の半分である正面部21fと裏面側の半分である裏面部21rとを模式的な平面で示している。正面部21fは、図8,図9に示すX座標の0〜11の部分であり、裏面部21rは、X座標の12〜22の部分である。図8,図9に示す例では、厳密には正面部21fと裏面部21rとは均等の面積にはならないが、図12(A)〜(D)では正面部21fと裏面部21rとを同じ面積で示している。図12(A)〜(D)は理解を容易にするため、裏面部21rは、裏面部21rを円環状部200rの裏面側から見た状態ではなく、正面部21fから裏面部21rを透視した状態を示している。
【0054】
図12(A)〜(D)に示すように、正面部21fに対する親指による入力操作と裏面部21rに対する人差し指による入力操作とを組み合わせたパターンをタッチセンサ21に対する特定の入力操作としてもよい。図12(A)は、正面部21fで親指を右方向に滑らせる右方向ドラッグDTRと、裏面部21rで人差し指を右方向に滑らせる右方向ドラッグDIRとの双方を行う例である。親指及び人差し指の双方を円環状部200rの内周側から外周側へとドラッグすることにより、図12(A)が実現される。親指と人差し指の双方を、図12(A)とは逆方向にドラッグするパターンとしてもよい。
【0055】
図12(B)は、正面部21fで親指を左方向に滑らせる左方向ドラッグDTLと、裏面部21rで人差し指を右方向に滑らせる右方向ドラッグDIRとの双方を行う例である。親指を円環状部200rの外周側から内周側へとドラッグし、人差し指を円環状部200rの内周側から外周側へとドラッグすることにより、図12(B)が実現される。図12(C)は、正面部21fで親指を右方向に滑らせる右方向ドラッグDTRと、裏面部21rで人差し指を左方向に滑らせる左方向ドラッグDILとの双方を行う例である。親指を円環状部200rの内周側から外周側へとドラッグし、人差し指を円環状部200rの外周側から内周側へとドラッグすることにより、図12(C)が実現される。
【0056】
図12(D)は、正面部21fで親指を上方向に滑らせる上方向ドラッグDTUと、裏面部21rで人差し指を下方向に滑らせる下方向ドラッグDIDとの双方を行う例である。親指を下方向、人差し指を上方向にドラッグとするパターンとしてもよく、親指と人差し指の双方を上方向または下方向にドラッグするパターンとしてもよい。ここでは、正面部21fに対する親指による入力操作と裏面部21rに対する人差し指による入力操作とを組み合わせた種々のパターンを示したが、入力操作のしやすさを考慮して適宜選択すればよい。
【0057】
図12(A)〜(D)に示すように、親指による入力操作と人差し指による入力操作とを組み合わせたパターンを、操作対象装置を制御するための特定の入力操作とすれば、さらに大幅に誤操作を低減させることが可能となる。
【0058】
さらには、図3(A),(B),(D),(E)や図4,図5のように、左右の手でタッチセンサ21(21a,21b)を操作できる場合に、左右の手による操作を組み合わせたパターンを、操作対象装置を制御するための特定の入力操作とすることも可能である。図13(A)〜(D)は、図3(B)における左側のタッチセンサ21を左側タッチセンサ21Lとし、右側のタッチセンサ21を右側タッチセンサ21Rとした場合の、左右の手による操作を組み合わせたパターンの例を示している。ここでは、親指によって操作する図12の正面部21fに相当する面を模式的な平面で示している。
【0059】
図13(A)は、左側タッチセンサ21Lに対して親指を左方向に滑らせる左方向ドラッグDTLと、右側タッチセンサ21Rに対して親指を右方向に滑らせる右方向ドラッグDTRとを組み合わせたパターンである。図13(B)は、左側タッチセンサ21Lに対して親指を右方向に滑らせる右方向ドラッグDTRと、右側タッチセンサ21Rに対して親指を左方向に滑らせる左方向ドラッグDTLとを組み合わせたパターンである。
【0060】
図13(C)は、左側タッチセンサ21Lと右側タッチセンサ21Rの双方に対して、親指を上方向に滑らせる上方向ドラッグDTUを組み合わせたパターンである。図13(D)は、左側タッチセンサ21Lと右側タッチセンサ21Rの双方に対して、親指を下方向に滑らせる下方向ドラッグDTDを組み合わせたパターンである。
【0061】
左右の手による入力操作を組み合わせたパターンを、操作対象装置を制御するための特定の入力操作とすれば、運転者は円環状部200rを両手で握ることになるので、安全運転に寄与することが可能である。特に、図3(B)の例は、円環状部200rを両手で握る最も適切な位置にタッチセンサ21を装着しているので、安全運転に寄与する点で最も好ましい。両手で左右のタッチセンサ21を握っている場合に入力操作を受け付けるようにしてもよい。片手がタッチセンサ21から離れた場合に入力操作を受け付けない状態としてもよい。片手がタッチセンサ21から離れた場合には入力操作を受け付ける状態を継続してもよい。片手のみの特定の入力操作を用いる場合であっても、両手で左右のタッチセンサ21を握っている場合に入力操作を受け付けるようにすれば、安全運転に寄与する。
【0062】
運転者が通常の運転のために円環状部200rを握っていて、操作対象装置を操作しようとする意思がない場合に、偶然に、親指による入力操作と人差し指による入力操作とを組み合わせた特定のパターンや、左右の手による入力操作を組み合わせた特定のパターンになってしまう可能性は比較的低いと考えられる。そこで、親指による入力操作と人差し指による入力操作とを組み合わせた特定のパターンや、左右の手による入力操作を組み合わせた特定のパターンのみを用いる場合には、上述した誤操作を回避するための工夫の一部または全てを省略してもよい。勿論、左右の手による入力操作を組み合わせた特定のパターンのみを用いる場合であっても、上述した誤操作を回避するための工夫を併せて採用することが好ましい。
【0063】
記憶部18は、以上説明した特定の入力操作または特定の入力操作を組み合わせたパターンと、操作対象装置に対する制御の種別とを対応させたテーブルを記憶している。制御部10は、記憶部18に記憶されたテーブルに従って、タッチセンサ21に入力された操作に応じて操作対象装置を制御する。記憶部18を制御部10内に設けてもよい。
【0064】
図14のフローチャートを用いて、本実施形態において制御部10で実行される処理について改めて説明する。図13において、制御部10は、ステップS1にて、センサデータ生成部22から出力されるセンサデータを取得する。制御部10は、ステップS2にて、検出部10aによる検出出力に基づいて、円環状部200rが握られているか否かを判定する。円環状部200rが握られていると判定されれば(YES)、制御部10は、ステップS3に処理を移し、円環状部200rが握られていると判定されなければ(NO)、制御部10は、ステップS1に処理を戻す。
【0065】
制御部10は、ステップS3にて、検出部10aによる検出出力に基づいて、入力操作があったか否かを判定する。入力操作があったと判定されれば(YES)、制御部10は、ステップS4に処理を移し、操作入力があったと判定されなければ(NO)、制御部10は、ステップS1に処理を戻す。制御部10は、ステップS4にて、ステップS3における入力操作によって操作対象装置に対する操作を許可するか否かを判定する。操作を許可すると判定されれば(YES)、制御部10は、ステップS5に処理を移し、操作を許可すると判定されなければ(NO)、制御部10は、ステップS1に処理を戻す。
【0066】
上述のように、制御部10は、操作検出エリアArv内で特定の入力操作がなされた場合に操作対象装置に対する操作を許可し、操作無効エリアAriv内で特定の入力操作がなされたとしても操作対象装置に対する操作を許可しない。また、制御部10は、操作検出エリアArv内で何らかの入力操作がなされたとしても、上述した特定の入力操作でない場合は操作対象装置に対する操作を許可せず、特定の入力操作がなされた場合のみ操作対象装置に対する操作を許可する。
【0067】
制御部10は、ステップS5にて、入力操作に基づいた操作を確定し、ステップS6にて、操作対象装置に対して、確定した操作に応じた制御を実行して、ステップS1に処理を戻す。
【0068】
また、ステップS4では、車両が特定の状態にあるときに、操作対象装置に対する制御を許可しないようにする(即ち、無効にする)ことが好ましい。制御部10には、操作対象装置に対する制御を許可するか否かを判断するためのステアリングホイール200の回転角度が設定されている。図15に示すように、ステアリングホイール200を回転させていない状態を回転角度0°とし、例えば右方向に回転させたときをプラス、左方向に回転させたときをマイナスとして、一例として回転角度±30°の範囲でタッチセンサ21に対する入力操作を有効として許可し、回転角度が±30°を超えたらタッチセンサ21に対する入力操作を無効として不許可とする。
【0069】
回転角度が±30°を超えた場合には、車両は右折または左折をしていたり、コーナリング走行していたりする特定の状態である。このような特定の状態で操作対象装置を制御しようとすれば誤操作が発生する可能性が高い。言い換えれば、このような特定の状態における操作入力は、ユーザの意図していない操作入力である可能性が高い。また安全性の上でも好ましくない。そこで、本実施形態では、車両が特定の状態にあるときには、操作対象装置に対する制御を無効とする。
【0070】
前述のように、制御部10にはステアリング角センサ31によって検出されたステアリングホイール200の回転角度が入力される。制御部10は、ステアリング角センサ31によって検出されたステアリングホイール200の回転角度に応じて、タッチセンサ21に対する入力操作を有効とする状態と無効とする状態とを切り換える。制御部10には方向指示器センサ32からの検出信号も入力される。そこで、制御部10は、方向指示器センサ32からの検出信号によって方向指示器320が操作された場合に、タッチセンサ21に対する入力操作を無効としてもよい。方向指示器320が操作された場合は、ステアリングホイール200が所定の回転角度を超えて回転される特定の状態になるとみなすことができる。なお、方向指示器320が右折または左折の合図以外の操作を兼用している場合があるが、ここでの方向指示器320の操作とは右折または左折の合図を行う操作である。
【0071】
さらに、車両を後退させている最中にタッチセンサ21に対して特定の入力操作を行って操作対象装置を制御することは好ましくない。誤操作が発生する可能性が高く、安全性の上でも好ましくない。そこで、制御部10は、シフトレバーセンサ33からの検出信号によって、シフトレバー330のシフト位置がリバースとなった場合にも、タッチセンサ21に対する入力操作を無効とすることが好ましい。ステアリングホイール200の回転角度が例えば±30°の所定角度を超えた場合、または、方向指示器320が操作された場合に加えて、シフトレバー330のシフト位置がリバースとなった場合に操作対象装置に対する制御を無効とすることが好ましいが、一方のみとしてもよい。
【0072】
なお、操作対象装置に対する制御を無効にするとは、仮に上述した特定の入力操作がなされたとしても特定の入力操作を無効として操作対象装置に対する制御を不許可とすることであってもよく、制御部10に対してセンサデータ生成部22から何らかのセンサデータが入力されても、制御部10がセンサデータを無効することであってもよい。結果として、操作対象装置に対する制御を無効とすればよい。
【0073】
図16のフローチャートを用いて、図14のステップS4の具体的な処理の例を説明する。図16において、制御部10は、ステップS41にて、シフトレバー330のシフト位置がリバースであるか否かを判定する。シフト位置がリバースであれば(YES)、制御部10は、ステップS45にて、ステップS3での入力操作を不許可として、図14のステップS1に移行させる。シフト位置がリバースでなければ(NO)、制御部10は、ステップS42にて、方向指示器320が操作されたか否かを判定する。方向指示器320が操作されたら(YES)、制御部10は、ステップS45にて、ステップS3での入力操作を不許可として、図14のステップS1に移行させる。
【0074】
方向指示器320が操作されなかったら(NO)、制御部10は、ステップS43にて、ステアリングホイール200の回転角度が所定角度を超えたか否かを判定する。ステアリングホイール200の回転角度が所定角度を超えたら(YES)、制御部10は、ステップS45にて、ステップS3での入力操作を不許可として、図14のステップS1に移行させる。ステアリングホイール200の回転角度が所定角度を超えていなかったら(NO)、制御部10は、ステップS44にて、操作検出エリアArv内で特定の入力操作がなされたか否かを判定する。特定の入力操作がなされなかったら(NO)、制御部10は、ステップS45にて、ステップS3での入力操作を不許可として、図14のステップS1に移行させる。ステップS45にて、入力操作を不許可とすれば、操作対象装置に対する制御が無効となる。特定の入力操作がなされたら(YES)、制御部10は、ステップS46にて、ステップS3での入力操作を許可して、図14のステップS5に移行させる。
【0075】
図16に示す例では、ステップS41,S42,S43の全てを設けたが、これらのステップの内の1つまたは2つのみとしてもよい。また、ステップS41,S42,S43の全てまたはこれらのステップの内の2つを設ける場合、順番は任意である。なお、ここではシフトレバー330と称したが、車両の直進と後退の切り換え、変速機の変速比を変える操作部の形状は任意であり、フロアシフト,コラムシフト,パドルシフト等のいずれでもよい。これらは全てシフトレバーに含まれる。
【0076】
以上のように、車両が右折,左折,コーナリング走行,後退等の特定の状態にあるときに、操作対象装置に対する制御を無効とすれば、運転者はこれらの特定の状態のときにタッチセンサ21に対する入力操作を行わない。従って、安全性の向上に寄与する。
【0077】
本実施形態による動作をまとめると、次の通りである。検出部10a(第1の検出部)は、ステアリングホイール200,201における運転者が握る握持部(円環状部200rまたは直線部201s)に装着されたタッチセンサ21における第1のエリアが触られている状態であることを検出する。第1のエリアの例は、グリップ検出エリアArgである。検出部10a(第2の検出部)は、第1のエリアが触られている状態で、タッチセンサ21における第1のエリアよりも上側に位置する第2のエリアに対して特定の入力操作がなされたことを検出する。第2のエリアの例は、操作検出エリアArvである。運転時、親指または人差し指は手のひらよりも上方に位置するので、第1のエリアよりも上側を第2のエリアとすればよい。そして、第1のエリアが触られている状態であり、特定の入力操作がなされたら、タッチセンサ21によって操作する対象の操作対象装置を特定の入力操作に応じて制御する。
【0078】
上側に位置するエリアとは、ステアリングホイール200を回転させていない状態で運転者が握持部を握った状態で、第1のエリアよりも上側に位置するエリアである。第1のエリアが所定の面積以上触られていることを検出した場合に、第1のエリアが触られている状態であるとすることが好ましい。
【0079】
また、別の観点では、次の通りである。検出部10a(第1の検出部)は、ステアリングホイール200,201における運転者が握る握持部(円環状部200rまたは直線部201s)の所定の範囲に、握持部を覆うように装着されたタッチセンサ21が、タッチセンサ21上の第1のエリアにおいて、握持部をステアリングホイール200,201の径方向に切断したときの断面における周方向の所定角度以上触られている状態であることを検出する。検出部10a(第2の検出部)は、第1のエリアが所定角度以上触られている状態で、タッチセンサ21における第1のエリアとは異なる第2のエリアに対して特定の入力操作がなされたことを検出する。第1のエリアが前記所定角度以上触られている状態であり、特定の入力操作がなされたら、タッチセンサ21によって操作する対象の操作対象装置を特定の入力操作に応じて制御する。
【0080】
第2のエリアは、第1のエリアよりも上側に位置するエリアであることが好ましい。上側に位置するエリアとは、ステアリングホイール200を回転させていない状態で運転者が握持部を握った状態で、第1のエリアよりも上側に位置するエリアである。
【0081】
図17及び図18は、タッチセンサ21を操作したことを運転者に効果的に知らせるための構成例を示している。図17及び図18は、図9と同様、タッチセンサ21を展開して矩形状に変換した模式図である。図17は、タッチセンサ21の下面側に発色物質を含む色変化シート41を設けた例である。タッチセンサ21に透明導電膜を用いることにより、運転者は、タッチセンサ21を介して、タッチセンサ21の下面に配置されている色変化シート41の色を見ることができる。制御部10による制御によって、タッチセンサ21を触った部分の色変化シート41の色を変化させることにより、運転者はタッチセンサ21を操作したことを認識することができる。
【0082】
図18は、タッチセンサ21の上面側に触覚(手触り)を変化させる触覚フィードバックシート42を設けた例である。触覚フィードバックシート42としては、例えば、フィンランドのSenseg社が開発した“E-Sense”と称されるシートを採用することができる。このシートは、フィルムを帯電させることで触覚のフィードバックを実現するものである。タッチセンサ21の上面側に触覚フィードバックシート42を設けても、タッチセンサ21は指等の接触を検出することが可能である。触覚フィードバックシート42を介してタッチセンサ21を操作した場合に、制御部10による制御によって、触覚フィードバックシート42の触覚を変化させることにより、運転者はタッチセンサ21を操作したことを認識することができる。
【0083】
次に、図19を用いてステアリングホイールの構成例について説明する。図19に示すステアリングホイール210は、操作対象装置に対する制御信号をステアリングホイール210から出力させるように構成したものである。図19において、図1,図2と同一部分には同一符号を付し、その説明を適宜省略する。図19に示すように、ステアリングホイール210は、例えば円環状部200r以外の部分に、図1のセンサデータ生成部22と同様のセンダデータ生成部23と、制御部10と同様の制御部24を備えている。制御部24は、検出部10aと同様の検出部24aと、制御信号発生部24bを有する。
【0084】
ステアリングホイール210を車両に装着した場合、制御信号発生部24bは、タッチセンサ21に対する特定の入力操作に応じて、操作対象装置を制御するための制御信号を発生する。制御信号発生部24bより出力された制御信号はケーブル25を介して出力端子26へと出力される。出力端子26を操作対象装置に接続すれば、制御信号によって操作対象装置を制御することが可能となる。特定の入力操作の例は図11〜図13と同様である。制御信号発生部24bが制御信号を発生する要件も上述と同様である。
【0085】
本発明は以上説明した本実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々変更可能である。タッチセンサ21を、面ファスナを用いて円環状部200rに着脱自在に装着するようにしてもよい。円環状部200rを握持部としたが、握持部は必ずしも円環状でなくてもよい。
【0086】
タッチセンサ21は1枚のシートによって構成する必要はなく、複数のタッチセンサの片によってタッチセンサ21を構成してもよい。複数のタッチセンサの片によってタッチセンサ21を構成すれば、一つ一つのタッチセンサの片の形状を簡単な形にすることができるため、タッチセンサを生産する際に有利である。なお、複数のタッチセンサの片によってタッチセンサ21を構成する場合、必ずしもタッチセンサの片を隙間なく配置しなくてもよい。本実施形態のタッチパネル21は、握持部を覆うように装着されているが、本実施形態における、握持部を覆うように装着されているということは、複数のタッチセンサの片からなるタッチセンサ21が、タッチセンサの片と片との間に隙間がある状態で、握持部を覆うように装着されていることも含むものとする。
【0087】
さらには、タッチセンサ21を設ける範囲を、運転者が運転時に握る握持部(円環状部200rまたは直線部201s)に限定せず、例えばエアバッグ等が収納されるセンター部と円環状部200rとの間を連結する連結部の表面まで広げてもよい。連結部は、図2においては、図2に示す状態で左右の手の間に位置する部分であり、図19においては、センサデータ生成部23及び制御部24が設けられている部分である。このようにタッチセンサ21を連結部の表面まで広げて、連結部における握持部に近い位置に操作検出エリアArvを設定してもよい。握持部に近い位置であれば、運転者が運転時に握持部から手を離したり、手を大きくずらしたりすることなく操作対象装置を操作することができる。よって、タッチセンサ21を連結部の表面まで広げた構成としても、運転者がステアリングホイール200,201,210を操作する際に支障となる可能性はほとんどない。
【符号の説明】
【0088】
10,24 制御部
10a,24a 検出部
11 ナビゲーション処理部
12 オーディオ再生部
13 テレビジョンチューナ
14 映像信号処理部
15 映像表示部
16 音声信号処理部
17 表示素子
18 記憶部
20 スピーカ
21 タッチセンサ
22,23 センサデータ生成部
24b 制御信号発生部
25 ケーブル
26 出力端子
31 ステアリング角センサ
32 方向指示器センサ
33 シフトレバーセンサ
34 車内通信部
200,201,210 ステアリングホイール
200r 円環状部(握持部)
201s 直線部(握持部)
【特許請求の範囲】
【請求項1】
複数の検出領域を有し、車両のステアリングホイールにおける運転者が握る握持部の所定の範囲に、前記握持部を覆うように装着されたタッチセンサから得られる接触検出信号に基づいて、どの検出領域が触られているかを示す位置データを含むセンサデータを生成するセンサデータ生成部と、
前記センサデータに基づいて、運転者が前記握持部を握っているか否か、及び、前記タッチセンサに対する入力操作を検出する検出部と、
前記検出部によって運転者が前記握持部を握っていることが検出され、かつ、前記タッチセンサに対して特定の入力操作が行われたことが検出された場合に、前記特定の入力操作に応じて、前記タッチセンサによって操作する対象の操作対象装置を制御する制御部と、
を備え、
前記制御部は、車両が特定の状態にあるときに、前記操作対象装置の制御を無効とすることを特徴とする車両における操作対象装置の制御装置。
【請求項2】
前記制御部は、前記ステアリングホイールの回転角度が所定の角度を超えたとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることを特徴とする請求項1記載の車両における操作対象装置の制御装置。
【請求項3】
前記制御部は、方向指示器が操作されたとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることを特徴とする請求項1または2に記載の車両における操作対象装置の制御装置。
【請求項4】
前記制御部は、シフトレバーのシフト位置がリバースとなったとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることを特徴とする請求項1〜3のいずれか1項に記載の車両における操作対象装置の制御装置。
【請求項5】
前記タッチセンサには、前記複数の検出領域の一部を含み、運転者の手のひらの接触を検出するグリップ検出エリアと、前記複数の検出領域の他の一部を含み、指の接触による前記特定の入力操作を検出する操作検出エリアとが設定されており、
前記検出部は、前記グリップ検出エリアから得られる接触検出信号に基づくセンサデータによって運転者が前記握持部を握っているか否かを検出し、前記操作検出エリアから得られる接触検出信号に基づくセンサデータによって前記特定の入力操作を検出する
ことを特徴とする請求項1〜4のいずれか1項に記載の車両における操作対象装置の制御装置。
【請求項6】
前記制御部は、前記特定の入力操作として、前記操作検出エリアに対して、前記握持部を前記ステアリングホイールの径方向に切断したときの断面における周方向に離間した2箇所を2つの指によって操作したパターンに応じて、前記操作対象装置を制御する
ことを特徴とする請求項5記載の車両における操作対象装置の制御装置。
【請求項7】
前記タッチセンサは、運転者が左手で握る握持部の所定の範囲に装着された第1のタッチセンサと右手で握る握持部の所定の範囲に装着された第2のタッチセンサとを含み、
前記制御部は、前記特定の入力操作として、前記第1のタッチセンサに対する第1の入力操作と前記第2のタッチセンサに対する第2の入力操作との組み合わせによるパターンに応じて、前記操作対象装置を制御する
ことを特徴とする請求項1〜6のいずれか1項に記載の車両における操作対象装置の制御装置。
【請求項8】
複数の検出領域を有し、車両のステアリングホイールにおける運転者が握る握持部の所定の範囲に、前記握持部を覆うように装着されたタッチセンサを運転者が握っているか否かを検出し、
前記タッチセンサに対して特定の入力操作が行われたか否かを検出し、
車両が特定の状態にあるか否かを検出し、
車両が特定の状態にはないことが検出され、運転者が前記タッチセンサを握っていることが検出され、かつ、前記特定の入力操作が行われたことが検出された場合に、前記タッチセンサによって操作する対象の操作対象装置を制御する
ことを特徴とする車両における操作対象装置の制御方法。
【請求項9】
前記ステアリングホイールの回転角度が所定の角度を超えたとき車両が特定の状態にあるにあるとして、前記操作対象装置の制御を無効とすることを特徴とする請求項8記載の車両における操作対象装置の制御方法。
【請求項10】
方向指示器が操作されたとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることを特徴とする請求項8または9に記載の車両における操作対象装置の制御方法。
【請求項11】
シフトレバーのシフト位置がリバースとなったとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることを特徴とする請求項8〜10のいずれか1項に記載の車両における操作対象装置の制御方法。
【請求項12】
前記タッチセンサには、前記複数の検出領域の一部を含み、運転者の手のひらの接触を検出するグリップ検出エリアと、前記複数の検出領域の他の一部を含み、指の接触による前記特定の操作を検出する操作検出エリアとが設定されており、
前記グリップ検出エリアに対する手のひらの接触によって、運転者が前記タッチセンサを握っていることを検出し、
前記操作検出エリアに対する指の接触によって、前記特定の入力操作が行われたことを検出する
ことを特徴とする請求項8〜11のいずれか1項に記載の車両における操作対象装置の制御方法。
【請求項13】
前記特定の入力操作として、前記操作検出エリアに対して、前記握持部を前記ステアリングホイールの径方向に切断したときの断面における周方向に離間した2箇所を2つの指によって操作したパターンに応じて、前記操作対象装置を制御する
ことを特徴とする請求項12記載の車両における操作対象装置の制御方法。
【請求項14】
前記タッチセンサは、運転者が左手で握る握持部の所定の範囲に装着された第1のタッチセンサと右手で握る握持部の所定の範囲に装着された第2のタッチセンサとを含み、
前記特定の入力操作として、前記第1のタッチセンサに対する第1の入力操作と前記第2のタッチセンサに対する第2の入力操作との組み合わせによるパターンに応じて、前記操作対象装置を制御する
ことを特徴とする請求項8〜13のいずれか1項に記載の車両における操作対象装置の制御方法。
【請求項1】
複数の検出領域を有し、車両のステアリングホイールにおける運転者が握る握持部の所定の範囲に、前記握持部を覆うように装着されたタッチセンサから得られる接触検出信号に基づいて、どの検出領域が触られているかを示す位置データを含むセンサデータを生成するセンサデータ生成部と、
前記センサデータに基づいて、運転者が前記握持部を握っているか否か、及び、前記タッチセンサに対する入力操作を検出する検出部と、
前記検出部によって運転者が前記握持部を握っていることが検出され、かつ、前記タッチセンサに対して特定の入力操作が行われたことが検出された場合に、前記特定の入力操作に応じて、前記タッチセンサによって操作する対象の操作対象装置を制御する制御部と、
を備え、
前記制御部は、車両が特定の状態にあるときに、前記操作対象装置の制御を無効とすることを特徴とする車両における操作対象装置の制御装置。
【請求項2】
前記制御部は、前記ステアリングホイールの回転角度が所定の角度を超えたとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることを特徴とする請求項1記載の車両における操作対象装置の制御装置。
【請求項3】
前記制御部は、方向指示器が操作されたとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることを特徴とする請求項1または2に記載の車両における操作対象装置の制御装置。
【請求項4】
前記制御部は、シフトレバーのシフト位置がリバースとなったとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることを特徴とする請求項1〜3のいずれか1項に記載の車両における操作対象装置の制御装置。
【請求項5】
前記タッチセンサには、前記複数の検出領域の一部を含み、運転者の手のひらの接触を検出するグリップ検出エリアと、前記複数の検出領域の他の一部を含み、指の接触による前記特定の入力操作を検出する操作検出エリアとが設定されており、
前記検出部は、前記グリップ検出エリアから得られる接触検出信号に基づくセンサデータによって運転者が前記握持部を握っているか否かを検出し、前記操作検出エリアから得られる接触検出信号に基づくセンサデータによって前記特定の入力操作を検出する
ことを特徴とする請求項1〜4のいずれか1項に記載の車両における操作対象装置の制御装置。
【請求項6】
前記制御部は、前記特定の入力操作として、前記操作検出エリアに対して、前記握持部を前記ステアリングホイールの径方向に切断したときの断面における周方向に離間した2箇所を2つの指によって操作したパターンに応じて、前記操作対象装置を制御する
ことを特徴とする請求項5記載の車両における操作対象装置の制御装置。
【請求項7】
前記タッチセンサは、運転者が左手で握る握持部の所定の範囲に装着された第1のタッチセンサと右手で握る握持部の所定の範囲に装着された第2のタッチセンサとを含み、
前記制御部は、前記特定の入力操作として、前記第1のタッチセンサに対する第1の入力操作と前記第2のタッチセンサに対する第2の入力操作との組み合わせによるパターンに応じて、前記操作対象装置を制御する
ことを特徴とする請求項1〜6のいずれか1項に記載の車両における操作対象装置の制御装置。
【請求項8】
複数の検出領域を有し、車両のステアリングホイールにおける運転者が握る握持部の所定の範囲に、前記握持部を覆うように装着されたタッチセンサを運転者が握っているか否かを検出し、
前記タッチセンサに対して特定の入力操作が行われたか否かを検出し、
車両が特定の状態にあるか否かを検出し、
車両が特定の状態にはないことが検出され、運転者が前記タッチセンサを握っていることが検出され、かつ、前記特定の入力操作が行われたことが検出された場合に、前記タッチセンサによって操作する対象の操作対象装置を制御する
ことを特徴とする車両における操作対象装置の制御方法。
【請求項9】
前記ステアリングホイールの回転角度が所定の角度を超えたとき車両が特定の状態にあるにあるとして、前記操作対象装置の制御を無効とすることを特徴とする請求項8記載の車両における操作対象装置の制御方法。
【請求項10】
方向指示器が操作されたとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることを特徴とする請求項8または9に記載の車両における操作対象装置の制御方法。
【請求項11】
シフトレバーのシフト位置がリバースとなったとき車両が特定の状態にあるとして、前記操作対象装置の制御を無効とすることを特徴とする請求項8〜10のいずれか1項に記載の車両における操作対象装置の制御方法。
【請求項12】
前記タッチセンサには、前記複数の検出領域の一部を含み、運転者の手のひらの接触を検出するグリップ検出エリアと、前記複数の検出領域の他の一部を含み、指の接触による前記特定の操作を検出する操作検出エリアとが設定されており、
前記グリップ検出エリアに対する手のひらの接触によって、運転者が前記タッチセンサを握っていることを検出し、
前記操作検出エリアに対する指の接触によって、前記特定の入力操作が行われたことを検出する
ことを特徴とする請求項8〜11のいずれか1項に記載の車両における操作対象装置の制御方法。
【請求項13】
前記特定の入力操作として、前記操作検出エリアに対して、前記握持部を前記ステアリングホイールの径方向に切断したときの断面における周方向に離間した2箇所を2つの指によって操作したパターンに応じて、前記操作対象装置を制御する
ことを特徴とする請求項12記載の車両における操作対象装置の制御方法。
【請求項14】
前記タッチセンサは、運転者が左手で握る握持部の所定の範囲に装着された第1のタッチセンサと右手で握る握持部の所定の範囲に装着された第2のタッチセンサとを含み、
前記特定の入力操作として、前記第1のタッチセンサに対する第1の入力操作と前記第2のタッチセンサに対する第2の入力操作との組み合わせによるパターンに応じて、前記操作対象装置を制御する
ことを特徴とする請求項8〜13のいずれか1項に記載の車両における操作対象装置の制御方法。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】

【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−75652(P2013−75652A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2012−43554(P2012−43554)
【出願日】平成24年2月29日(2012.2.29)
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成24年2月29日(2012.2.29)
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
[ Back to top ]