
車両のクリープトルク制御システムおよび方法
【課題】
車両のクリープトルク制御システム及び方法を提供する。
【解決手段】
車両のクリープトルク制御方法は、車両の始動がかかった状態で、ブレーキの作動により車両を停止させるステップと、前記車両が停止した状態で、クリープトルクを0に制御するステップと、前記ブレーキが解除されたか否かを判断するステップと、前記ブレーキが解除された場合、クリープトルクを発生するステップとを含み、クリープトルク制御システムは、前記車両のブレーキペダルの入力を感知し、その信号を伝送するセンサと、前記車両のクリープトルクを発生するための電気モータと、前記センサから前記ブレーキペダルの入力信号を受信し、これに基づいて前記電気モータを制御する制御部とを含み、前記制御部は、前記車両のクリープトルク制御を行うことを特徴とする。
車両のクリープトルク制御システム及び方法を提供する。
【解決手段】
車両のクリープトルク制御方法は、車両の始動がかかった状態で、ブレーキの作動により車両を停止させるステップと、前記車両が停止した状態で、クリープトルクを0に制御するステップと、前記ブレーキが解除されたか否かを判断するステップと、前記ブレーキが解除された場合、クリープトルクを発生するステップとを含み、クリープトルク制御システムは、前記車両のブレーキペダルの入力を感知し、その信号を伝送するセンサと、前記車両のクリープトルクを発生するための電気モータと、前記センサから前記ブレーキペダルの入力信号を受信し、これに基づいて前記電気モータを制御する制御部とを含み、前記制御部は、前記車両のクリープトルク制御を行うことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両のクリープトルク制御システムおよび方法に係り、より詳しくは、停車後出発状況などにおいて、クリープトルクによるノイズを低減することができる車両のクリープトルク制御システムおよび方法に関する。
【背景技術】
【0002】
自動車の制動装置において、ブレーキノイズの発生は、走行性能には直接的に大きな影響を与えないが、車両購入者の初期品質満足度において重要な項目として評価されている。顧客の満足を最優先とする市場環境において、商品性および自動車メーカー別の品質差別性は、その重要性がますます増大しているのが現状である。
【0003】
ブレーキ摩擦材のクリープグローンノイズ(Creep Groan Noise)は、約20〜200Hz帯の低周波ノイズであり、図1に示しているように、ブレーキの解除時、クリープトルクがブレーキトルクより大きくなる区間でのスティックスリップ(Stick−slip)現象により発生する。
【0004】
スティックスリップ(Stick−slip)現象とは、摩擦材とディスクとが摩擦する時、静止摩擦係数と運動摩擦係数との差により摩擦面で瞬間的な停止と滑りが連続する現象であり、これにより、摩擦力の変化を伴い、加振力(excitation force)を生じて自励振動(Self−excited vibration)が発生する。
【0005】
このように、クリープトルクがブレーキトルクより大きくなる区間では、極低速、低圧下でディスクブレーキとブレーキパッドのスティックスリップ(Stick−slip)現象が生じ、これにより、自励振動(Self−excited vibration)が誘発することにより、クリープグローンノイズが発生するという問題があった。
(例えば引用文献1参照。)
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−8238号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は前記のような問題点に鑑みてなされたものであって、本発明の目的は、スティックスリップ現象を最少化し、クリープグローンノイズを低減することができる車両のクリープトルク制御システムおよび方法を提供することにある。
【課題を解決するための手段】
【0008】
前記の目的を実現するための本発明の実施形態に係る車両のクリープトルク制御方法は、車両の始動がかかった状態で、ブレーキの作動により車両を停止するステップと、前記車両が停止した状態で、クリープトルクを0に制御するステップと、前記ブレーキが解除されたか否かを判断するステップと、前記ブレーキが解除された場合、クリープトルクを発生するステップとを含むことを特徴とする。
【0009】
前記方法は、前記クリープトルクが発生すると、車両を走行モードに進入させるステップをさらに含むことを特徴とする。
【0010】
前記ブレーキの解除される量に反比例して前記クリープトルクを発生することを特徴とする。
【0011】
前記車両は、電気車(Electric Vehicle)であることを特徴とする。
【0012】
前記車両は、ハイブリッド車両(Hybrid Electric Vehicle)であり、前記ハイブリッド車両は、電気車モードであることを特徴とする。
【0013】
前記電気車は、駆動モータを含み、前記クリープトルクは、前記駆動モータのトルクを制御することにより制御できることを特徴とする。
【0014】
前記ハイブリッド車両は、駆動モータを含み、前記クリープトルクは、前記駆動モータのトルクを制御することにより制御できることを特徴とする。
【0015】
前記ブレーキの作動および解除は、ブレーキペダルストロークセンサで感知することができることを特徴とする。
【0016】
本発明の他の実施形態に係る車両のクリープトルク制御システムは、前記車両のブレーキペダルの入力を感知し、その信号を伝送するセンサと、前記車両のクリープトルクを発生するための電気モータと、前記センサから前記ブレーキペダルの入力信号を受信し、これに基づいて前記電気モータを制御する制御部とを含み、前記制御部は、車両の始動状態で、ブレーキの作動により前記車両が停止すると、前記クリープトルクを0に制御し、前記ブレーキが解除されると、前記電気モータを制御してクリープトルクを発生することを特徴とする。
【0017】
前記制御部は、前記ブレーキが解除される量に反比例して前記クリープトルクを発生することを特徴とする。
【0018】
前記センサは、ブレーキペダルストロークセンサであることを特徴とする。
【0019】
前記車両は、電気車(Electric Vehicle)またはハイブリッド車両(Hybrid Electric Vehicle)であることを特徴とする。
【図面の簡単な説明】
【0020】
【図1】従来技術に係る車両のブレーキペダルの入力とクリープトルクを示すグラフ。
【図2】本発明の実施形態に係る車両のクリープトルク制御システムのブロック図。
【図3】本発明の実施形態に係る車両のクリープトルク制御方法のフローチャート。
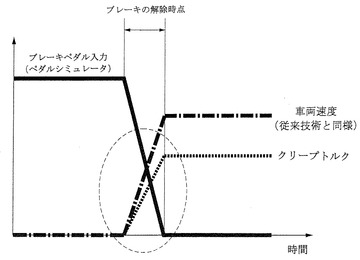
【図4】本発明の実施形態に係る車両のクリープトルク制御システムおよび方法でブレーキペダルの入力とクリープトルクを示すグラフ。
【発明を実施するための形態】
【0021】
以下、本発明の好ましい実施形態を、添付した図面を参照して詳細に説明する。
【0022】
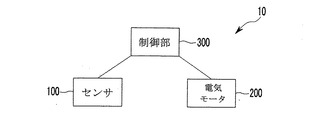
図2は、本発明の実施形態に係る車両のクリープトルク制御システム10のブロック図である。
【0023】
図2に示しているように、本発明の実施形態に係る車両のクリープトルク制御システム10は、前記車両のブレーキペダルの入力を感知し、その信号を伝送するセンサ100と、前記車両のクリープトルクを発生するための電気モータ200と、前記センサ100から前記ブレーキ入力信号を受信し、これに基づいて前記電気モータ200を制御する制御部300とを含む。
【0024】
前記センサ100は、車両のブレーキ入力信号を感知し、これを電気的信号に切り替えて伝送する役割を果たす。
【0025】
1つまたは複数の実施形態において、前記センサ100は、車両の運転者が車両のブレーキペダルを踏む程度を感知するブレーキペダルストロークセンサ100である。ブレーキペダルストロークセンサ100で感知した信号は前記制御部300に伝送される。
【0026】
前記電気モータ200は、前記車両のクリープトルクを発生するためのモータであって、前記制御部300により制御される。したがって、本発明の実施形態に係るクリープトルク制御システム10が適用される車両は、電気モータ200を動力源として備える電気車またはハイブリッド車両である。
【0027】
一般的に、内燃機関車両の場合には、エンジンのアイドルRPMに応じてクリープトルクの大きさが常時同一に定められている。これとは異なり、電気車やハイブリッド車両の場合には、電気モータの駆動によりクリープトルクの発生を制御するため、クリープトルク制御システム10は、電気車やハイブリッド車両に適用するのに適している。
【0028】
1つまたは複数の実施形態において、前記車両がハイブリッド車両の場合には、電気車モードでのみ前記クリープトルク制御システム10が適用されるようにできる。電気車モードとは、エンジンが駆動されるのではなく、電気モータ200によってのみ車両が駆動されるモードである。ハイブリッド車両でエンジンが駆動される場合には、エンジンのアイドルRPMに応じてクリープトルクが常時発生する。したがって、本発明の実施形態に係るクリープトルク制御システム10は、ハイブリッドモードで適用することが困難である。
【0029】
前記制御部300は、前記センサ100から前記ブレーキ入力信号を受信し、これに基づいて前記電気モータ200を制御する役割を果たす。前記制御部300としては、車両のECU(Electric Control Unit)などが使用可能である。
【0030】
具体的には、前記制御部300は、車両のブレーキが作動して前記車両が停止状態になると、前記クリープトルクを0に制御し、前記ブレーキが解除されると、前記電気モータ200を駆動してクリープトルクを発生する。
【0031】
つまり、前記制御部300は、ブレーキの作動が解除されてからクリープトルクを発生することにより、スティックスリップ(Stick−slip)現象を最少化し、車両発進時にクリープグローンノイズ(Creep Groan Noise)を低減するものである。
【0032】
1つまたは複数の実施形態において、運転者がブレーキペダルをどの程度踏んでいればブレーキが作動していると判断し、運転者がブレーキペダルから足をどの程度離していればブレーキが解除されたと判断するかについては、制御部300に予め設定することができる。つまり、ブレーキペダルストロークセンサ100から送られる信号が予め設定された値以下の場合には、ブレーキが解除されたと判断し、前記予め設定された値を超えると、ブレーキが作動していると判断することができる。
【0033】
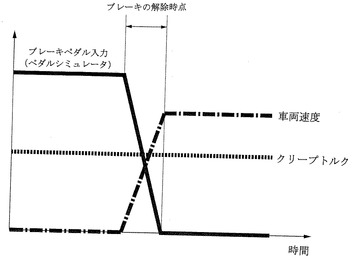
1つまたは複数の実施形態において、図4に示しているように、前記制御部300は、前記ブレーキの作動が解除される量に反比例(inverse proportion)して前記クリープトルクが発生するように、前記電気モータ200を制御することができる。
【0034】
制御部300は、ブレーキペダルストロークセンサ100からブレーキペダルの入力をリアルタイムで受信するので、ブレーキペダルの入力に反比例するクリープトルクが発生するように制御することができる。
【0035】
ブレーキペダルの入力に反比例するクリープトルクが発生すると、車両発進時に運転者が感じる発進感を向上させ、車両運行の安全性を向上させる。
【0036】
以下、本発明の実施形態に係る車両のクリープトルク制御方法を、図3および図4を参照して具体的に説明する。
【0037】
図3は、本発明の実施形態に係る車両のクリープトルク制御方法のフローチャートであり、図4は、本発明の実施形態に係る車両のクリープトルク制御システムおよび方法でブレーキペダルの入力とクリープトルクを示すグラフである。
【0038】
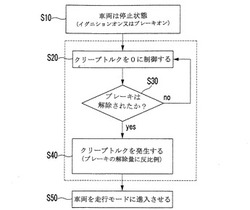
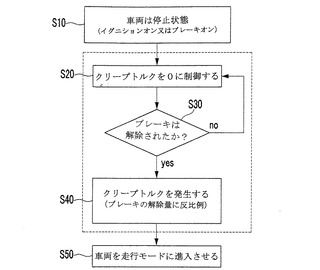
図3に示しているように、本発明の実施形態に係る車両のクリープトルク制御方法は、前記車両の始動がかかった状態で、ブレーキが作動して車両が停止するステップ(S10)と、前記ブレーキが作動して車両が停止した状態で、クリープトルクを0に制御するステップ(S20)と、前記ブレーキが解除されたか否かを判断するステップ(S30)と、前記ブレーキが解除された場合、クリープトルクが発生するように制御するステップ(S40)と、前記クリープトルクが発生すると、車両を走行モードに進入させるステップ(S50)とを含む。
【0039】
まず、車両の始動がかかった状態で、車両のブレーキが作動して前記車両は停止する(S10)。
【0040】
本発明の実施形態は、ブレーキの解除により車両が低速で運行する場合、スティックスリップによるクリープグローンノイズの発生を低減するためのものである。したがって、本発明の実施形態に係る方法は、車両のブレーキが作動して車両が停止した時に始まる。また、ブレーキが解除されると、車両はクリープトルクを発生しなければならないため、始動がかかっていなければならない。
【0041】
車両のブレーキが作動しており、車両の始動がかかっており、車両が停止していると、制御部300は、前記車両のクリープトルクが0となるように制御する(S20)。つまり、車両のクリープトルクが発生しないように制御する。
【0042】
1つまたは複数の実施形態において、本発明の実施形態に係るクリープトルク制御方法が適用される車両は、電気車またはハイブリッド車両である。仮に、本発明の実施形態が適用される車両がハイブリッド車両の場合は、電気車モードでのみ本発明の実施形態に係るクリープトルク制御方法が適用される。
【0043】
その後、制御部300は、前記車両のブレーキが解除されたか否かを判断する(S30)。ECU(Electric Control Unit)のような車両の制御部300でブレーキの作動を感知するセンサの信号を受信し、ブレーキが作動状態であるか、解除状態であるかを判断する。
【0044】
1つまたは複数の実施形態において、前記センサは、ブレーキペダルストロークセンサ100である。車両の運転者がブレーキペダルを踏んでいる場合、ブレーキペダルストロークセンサ100は、ブレーキペダルの押された程度を感知し、その信号を制御部300に送り、制御部300は、ブレーキが作動していると判断する。逆に、運転者がブレーキペダルから足を離すと、ブレーキペダルストロークセンサ100でこれを感知し、制御部300に信号を送り、制御部300は、ブレーキが解除されたと判断する。
【0045】
1つまたは複数の実施形態において、運転者がブレーキペダルをどの程度踏んでいればブレーキが作動していると判断し、運転者がブレーキペダルから足をどの程度離していればブレーキが解除されたと判断するかについては、制御部300に予め設定することができる。つまり、ブレーキペダルストロークセンサ100から送られる信号が予め設定された値以下の場合には、ブレーキが解除されたと判断し、前記予め設定された値を超えると、ブレーキが作動していると判断することができる。
【0046】
また、図4に示しているように、ブレーキペダルシミュレータやブレーキペダルストロークセンサ100などで検出したブレーキの入力が急激に低下する時点を、制御部300はブレーキの解除時点と判断することができる。
【0047】
前記ステップS30でブレーキが解除されていないと判断される場合には、制御部300はステップS20に戻る。したがって、ブレーキが解除される前までは、クリープトルクは継続して0に制御される。
【0048】
一方、前記ステップS30でブレーキが解除されたと判断される場合には、前記制御部300は、車両のクリープトルクを発生するように制御する(S40)。
【0049】
つまり、ブレーキが作動する時には、電気モータ200を制御してクリープトルクが0になるようにするが、ブレーキが解除されると、電気モータ200を制御して0でないクリープトルクを発生する。したがって、スティックスリップ(Stick−slip)現象を最小化することができる。
【0050】
従来技術の場合には、ブレーキが作動してもクリープトルクが発生していた。この状態でブレーキが解除されると、図1に示しているように、クリープトルクがブレーキトルクより大きくなる区間でスティックスリップ(Stick−slip)現象が発生し、クリープグローンノイズが大きく発生していた。
【0051】
しかし、本発明の実施形態によれば、ブレーキ作動時には、クリープトルクは0に制御され、ブレーキが解除されると、クリープトルクを発生するため、従来技術に比べてスティックスリップ(Stick−slip)現象が最小化する。
【0052】
したがって、本発明の実施形態によれば、スティックスリップ現象が最小化することにより、クリープグローンノイズが顕著に低減する。
【0053】
1つまたは複数の実施形態において、図4に示しているように、前記制御部300は、前記ブレーキの解除される量に反比例して前記クリープトルクを発生するように制御することができる。
【0054】
制御部300は、ブレーキペダルストロークセンサ100からブレーキペダルの入力をリアルタイムで受信するので、ブレーキペダルの入力に反比例してクリープトルクを発生するように制御することができる。
【0055】
したがって、車両発進時に車両の運転者が感じる発進感を向上させ、車両運行の安全性を向上させる。
【0056】
クリープトルクが発生すると、車両は走行モードに進入する(S50)。
【0057】
ブレーキが解除される量に反比例して車両のクリープトルクが発生するため、車両が徐々に発振するようになり、運転者が感じる発進感が向上し、運行時の安全性が向上するという効果がある。
【0058】
本発明の実施形態によれば、車両のブレーキが作動すると、クリープトルクを発生させず、車両のブレーキが解除されると、クリープトルクを発生することにより、スティックスリップ(Stick−slip)現象を最少化し、車両のクリープグローンノイズ(Creep Groan Noise)を顕著に低減することができるという効果がある。
【0059】
以上、本発明に関する好ましい実施形態を説明したが、本発明は、上記の実施形態に限定されず、当該発明の属する技術分野における当業者によって、本発明の技術的範囲内において容易に変更することができる。
【産業上の利用可能性】
【0060】
本発明は、クリープトルクノイズを低減する車両のクリープトルク制御システムおよび制御方法の分野に適用できる。
【符号の説明】
【0061】
10 車両のクリープトルク制御システム
100 センサ(ブレーキペダルストロークセンサ)
200 電気モータ
300 制御部
【技術分野】
【0001】
本発明は、車両のクリープトルク制御システムおよび方法に係り、より詳しくは、停車後出発状況などにおいて、クリープトルクによるノイズを低減することができる車両のクリープトルク制御システムおよび方法に関する。
【背景技術】
【0002】
自動車の制動装置において、ブレーキノイズの発生は、走行性能には直接的に大きな影響を与えないが、車両購入者の初期品質満足度において重要な項目として評価されている。顧客の満足を最優先とする市場環境において、商品性および自動車メーカー別の品質差別性は、その重要性がますます増大しているのが現状である。
【0003】
ブレーキ摩擦材のクリープグローンノイズ(Creep Groan Noise)は、約20〜200Hz帯の低周波ノイズであり、図1に示しているように、ブレーキの解除時、クリープトルクがブレーキトルクより大きくなる区間でのスティックスリップ(Stick−slip)現象により発生する。
【0004】
スティックスリップ(Stick−slip)現象とは、摩擦材とディスクとが摩擦する時、静止摩擦係数と運動摩擦係数との差により摩擦面で瞬間的な停止と滑りが連続する現象であり、これにより、摩擦力の変化を伴い、加振力(excitation force)を生じて自励振動(Self−excited vibration)が発生する。
【0005】
このように、クリープトルクがブレーキトルクより大きくなる区間では、極低速、低圧下でディスクブレーキとブレーキパッドのスティックスリップ(Stick−slip)現象が生じ、これにより、自励振動(Self−excited vibration)が誘発することにより、クリープグローンノイズが発生するという問題があった。
(例えば引用文献1参照。)
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−8238号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は前記のような問題点に鑑みてなされたものであって、本発明の目的は、スティックスリップ現象を最少化し、クリープグローンノイズを低減することができる車両のクリープトルク制御システムおよび方法を提供することにある。
【課題を解決するための手段】
【0008】
前記の目的を実現するための本発明の実施形態に係る車両のクリープトルク制御方法は、車両の始動がかかった状態で、ブレーキの作動により車両を停止するステップと、前記車両が停止した状態で、クリープトルクを0に制御するステップと、前記ブレーキが解除されたか否かを判断するステップと、前記ブレーキが解除された場合、クリープトルクを発生するステップとを含むことを特徴とする。
【0009】
前記方法は、前記クリープトルクが発生すると、車両を走行モードに進入させるステップをさらに含むことを特徴とする。
【0010】
前記ブレーキの解除される量に反比例して前記クリープトルクを発生することを特徴とする。
【0011】
前記車両は、電気車(Electric Vehicle)であることを特徴とする。
【0012】
前記車両は、ハイブリッド車両(Hybrid Electric Vehicle)であり、前記ハイブリッド車両は、電気車モードであることを特徴とする。
【0013】
前記電気車は、駆動モータを含み、前記クリープトルクは、前記駆動モータのトルクを制御することにより制御できることを特徴とする。
【0014】
前記ハイブリッド車両は、駆動モータを含み、前記クリープトルクは、前記駆動モータのトルクを制御することにより制御できることを特徴とする。
【0015】
前記ブレーキの作動および解除は、ブレーキペダルストロークセンサで感知することができることを特徴とする。
【0016】
本発明の他の実施形態に係る車両のクリープトルク制御システムは、前記車両のブレーキペダルの入力を感知し、その信号を伝送するセンサと、前記車両のクリープトルクを発生するための電気モータと、前記センサから前記ブレーキペダルの入力信号を受信し、これに基づいて前記電気モータを制御する制御部とを含み、前記制御部は、車両の始動状態で、ブレーキの作動により前記車両が停止すると、前記クリープトルクを0に制御し、前記ブレーキが解除されると、前記電気モータを制御してクリープトルクを発生することを特徴とする。
【0017】
前記制御部は、前記ブレーキが解除される量に反比例して前記クリープトルクを発生することを特徴とする。
【0018】
前記センサは、ブレーキペダルストロークセンサであることを特徴とする。
【0019】
前記車両は、電気車(Electric Vehicle)またはハイブリッド車両(Hybrid Electric Vehicle)であることを特徴とする。
【図面の簡単な説明】
【0020】
【図1】従来技術に係る車両のブレーキペダルの入力とクリープトルクを示すグラフ。
【図2】本発明の実施形態に係る車両のクリープトルク制御システムのブロック図。
【図3】本発明の実施形態に係る車両のクリープトルク制御方法のフローチャート。
【図4】本発明の実施形態に係る車両のクリープトルク制御システムおよび方法でブレーキペダルの入力とクリープトルクを示すグラフ。
【発明を実施するための形態】
【0021】
以下、本発明の好ましい実施形態を、添付した図面を参照して詳細に説明する。
【0022】
図2は、本発明の実施形態に係る車両のクリープトルク制御システム10のブロック図である。
【0023】
図2に示しているように、本発明の実施形態に係る車両のクリープトルク制御システム10は、前記車両のブレーキペダルの入力を感知し、その信号を伝送するセンサ100と、前記車両のクリープトルクを発生するための電気モータ200と、前記センサ100から前記ブレーキ入力信号を受信し、これに基づいて前記電気モータ200を制御する制御部300とを含む。
【0024】
前記センサ100は、車両のブレーキ入力信号を感知し、これを電気的信号に切り替えて伝送する役割を果たす。
【0025】
1つまたは複数の実施形態において、前記センサ100は、車両の運転者が車両のブレーキペダルを踏む程度を感知するブレーキペダルストロークセンサ100である。ブレーキペダルストロークセンサ100で感知した信号は前記制御部300に伝送される。
【0026】
前記電気モータ200は、前記車両のクリープトルクを発生するためのモータであって、前記制御部300により制御される。したがって、本発明の実施形態に係るクリープトルク制御システム10が適用される車両は、電気モータ200を動力源として備える電気車またはハイブリッド車両である。
【0027】
一般的に、内燃機関車両の場合には、エンジンのアイドルRPMに応じてクリープトルクの大きさが常時同一に定められている。これとは異なり、電気車やハイブリッド車両の場合には、電気モータの駆動によりクリープトルクの発生を制御するため、クリープトルク制御システム10は、電気車やハイブリッド車両に適用するのに適している。
【0028】
1つまたは複数の実施形態において、前記車両がハイブリッド車両の場合には、電気車モードでのみ前記クリープトルク制御システム10が適用されるようにできる。電気車モードとは、エンジンが駆動されるのではなく、電気モータ200によってのみ車両が駆動されるモードである。ハイブリッド車両でエンジンが駆動される場合には、エンジンのアイドルRPMに応じてクリープトルクが常時発生する。したがって、本発明の実施形態に係るクリープトルク制御システム10は、ハイブリッドモードで適用することが困難である。
【0029】
前記制御部300は、前記センサ100から前記ブレーキ入力信号を受信し、これに基づいて前記電気モータ200を制御する役割を果たす。前記制御部300としては、車両のECU(Electric Control Unit)などが使用可能である。
【0030】
具体的には、前記制御部300は、車両のブレーキが作動して前記車両が停止状態になると、前記クリープトルクを0に制御し、前記ブレーキが解除されると、前記電気モータ200を駆動してクリープトルクを発生する。
【0031】
つまり、前記制御部300は、ブレーキの作動が解除されてからクリープトルクを発生することにより、スティックスリップ(Stick−slip)現象を最少化し、車両発進時にクリープグローンノイズ(Creep Groan Noise)を低減するものである。
【0032】
1つまたは複数の実施形態において、運転者がブレーキペダルをどの程度踏んでいればブレーキが作動していると判断し、運転者がブレーキペダルから足をどの程度離していればブレーキが解除されたと判断するかについては、制御部300に予め設定することができる。つまり、ブレーキペダルストロークセンサ100から送られる信号が予め設定された値以下の場合には、ブレーキが解除されたと判断し、前記予め設定された値を超えると、ブレーキが作動していると判断することができる。
【0033】
1つまたは複数の実施形態において、図4に示しているように、前記制御部300は、前記ブレーキの作動が解除される量に反比例(inverse proportion)して前記クリープトルクが発生するように、前記電気モータ200を制御することができる。
【0034】
制御部300は、ブレーキペダルストロークセンサ100からブレーキペダルの入力をリアルタイムで受信するので、ブレーキペダルの入力に反比例するクリープトルクが発生するように制御することができる。
【0035】
ブレーキペダルの入力に反比例するクリープトルクが発生すると、車両発進時に運転者が感じる発進感を向上させ、車両運行の安全性を向上させる。
【0036】
以下、本発明の実施形態に係る車両のクリープトルク制御方法を、図3および図4を参照して具体的に説明する。
【0037】
図3は、本発明の実施形態に係る車両のクリープトルク制御方法のフローチャートであり、図4は、本発明の実施形態に係る車両のクリープトルク制御システムおよび方法でブレーキペダルの入力とクリープトルクを示すグラフである。
【0038】
図3に示しているように、本発明の実施形態に係る車両のクリープトルク制御方法は、前記車両の始動がかかった状態で、ブレーキが作動して車両が停止するステップ(S10)と、前記ブレーキが作動して車両が停止した状態で、クリープトルクを0に制御するステップ(S20)と、前記ブレーキが解除されたか否かを判断するステップ(S30)と、前記ブレーキが解除された場合、クリープトルクが発生するように制御するステップ(S40)と、前記クリープトルクが発生すると、車両を走行モードに進入させるステップ(S50)とを含む。
【0039】
まず、車両の始動がかかった状態で、車両のブレーキが作動して前記車両は停止する(S10)。
【0040】
本発明の実施形態は、ブレーキの解除により車両が低速で運行する場合、スティックスリップによるクリープグローンノイズの発生を低減するためのものである。したがって、本発明の実施形態に係る方法は、車両のブレーキが作動して車両が停止した時に始まる。また、ブレーキが解除されると、車両はクリープトルクを発生しなければならないため、始動がかかっていなければならない。
【0041】
車両のブレーキが作動しており、車両の始動がかかっており、車両が停止していると、制御部300は、前記車両のクリープトルクが0となるように制御する(S20)。つまり、車両のクリープトルクが発生しないように制御する。
【0042】
1つまたは複数の実施形態において、本発明の実施形態に係るクリープトルク制御方法が適用される車両は、電気車またはハイブリッド車両である。仮に、本発明の実施形態が適用される車両がハイブリッド車両の場合は、電気車モードでのみ本発明の実施形態に係るクリープトルク制御方法が適用される。
【0043】
その後、制御部300は、前記車両のブレーキが解除されたか否かを判断する(S30)。ECU(Electric Control Unit)のような車両の制御部300でブレーキの作動を感知するセンサの信号を受信し、ブレーキが作動状態であるか、解除状態であるかを判断する。
【0044】
1つまたは複数の実施形態において、前記センサは、ブレーキペダルストロークセンサ100である。車両の運転者がブレーキペダルを踏んでいる場合、ブレーキペダルストロークセンサ100は、ブレーキペダルの押された程度を感知し、その信号を制御部300に送り、制御部300は、ブレーキが作動していると判断する。逆に、運転者がブレーキペダルから足を離すと、ブレーキペダルストロークセンサ100でこれを感知し、制御部300に信号を送り、制御部300は、ブレーキが解除されたと判断する。
【0045】
1つまたは複数の実施形態において、運転者がブレーキペダルをどの程度踏んでいればブレーキが作動していると判断し、運転者がブレーキペダルから足をどの程度離していればブレーキが解除されたと判断するかについては、制御部300に予め設定することができる。つまり、ブレーキペダルストロークセンサ100から送られる信号が予め設定された値以下の場合には、ブレーキが解除されたと判断し、前記予め設定された値を超えると、ブレーキが作動していると判断することができる。
【0046】
また、図4に示しているように、ブレーキペダルシミュレータやブレーキペダルストロークセンサ100などで検出したブレーキの入力が急激に低下する時点を、制御部300はブレーキの解除時点と判断することができる。
【0047】
前記ステップS30でブレーキが解除されていないと判断される場合には、制御部300はステップS20に戻る。したがって、ブレーキが解除される前までは、クリープトルクは継続して0に制御される。
【0048】
一方、前記ステップS30でブレーキが解除されたと判断される場合には、前記制御部300は、車両のクリープトルクを発生するように制御する(S40)。
【0049】
つまり、ブレーキが作動する時には、電気モータ200を制御してクリープトルクが0になるようにするが、ブレーキが解除されると、電気モータ200を制御して0でないクリープトルクを発生する。したがって、スティックスリップ(Stick−slip)現象を最小化することができる。
【0050】
従来技術の場合には、ブレーキが作動してもクリープトルクが発生していた。この状態でブレーキが解除されると、図1に示しているように、クリープトルクがブレーキトルクより大きくなる区間でスティックスリップ(Stick−slip)現象が発生し、クリープグローンノイズが大きく発生していた。
【0051】
しかし、本発明の実施形態によれば、ブレーキ作動時には、クリープトルクは0に制御され、ブレーキが解除されると、クリープトルクを発生するため、従来技術に比べてスティックスリップ(Stick−slip)現象が最小化する。
【0052】
したがって、本発明の実施形態によれば、スティックスリップ現象が最小化することにより、クリープグローンノイズが顕著に低減する。
【0053】
1つまたは複数の実施形態において、図4に示しているように、前記制御部300は、前記ブレーキの解除される量に反比例して前記クリープトルクを発生するように制御することができる。
【0054】
制御部300は、ブレーキペダルストロークセンサ100からブレーキペダルの入力をリアルタイムで受信するので、ブレーキペダルの入力に反比例してクリープトルクを発生するように制御することができる。
【0055】
したがって、車両発進時に車両の運転者が感じる発進感を向上させ、車両運行の安全性を向上させる。
【0056】
クリープトルクが発生すると、車両は走行モードに進入する(S50)。
【0057】
ブレーキが解除される量に反比例して車両のクリープトルクが発生するため、車両が徐々に発振するようになり、運転者が感じる発進感が向上し、運行時の安全性が向上するという効果がある。
【0058】
本発明の実施形態によれば、車両のブレーキが作動すると、クリープトルクを発生させず、車両のブレーキが解除されると、クリープトルクを発生することにより、スティックスリップ(Stick−slip)現象を最少化し、車両のクリープグローンノイズ(Creep Groan Noise)を顕著に低減することができるという効果がある。
【0059】
以上、本発明に関する好ましい実施形態を説明したが、本発明は、上記の実施形態に限定されず、当該発明の属する技術分野における当業者によって、本発明の技術的範囲内において容易に変更することができる。
【産業上の利用可能性】
【0060】
本発明は、クリープトルクノイズを低減する車両のクリープトルク制御システムおよび制御方法の分野に適用できる。
【符号の説明】
【0061】
10 車両のクリープトルク制御システム
100 センサ(ブレーキペダルストロークセンサ)
200 電気モータ
300 制御部
【特許請求の範囲】
【請求項1】
車両のクリープトルク制御方法において、
車両の始動がかかった状態で、ブレーキの作動により車両を停止させるステップと、
前記車両が停止した状態で、クリープトルクを0に制御するステップと、
前記ブレーキが解除されたか否かを判断するステップと、
前記ブレーキが解除された場合、クリープトルクを発生するステップとを含むことを特徴とする車両のクリープトルク制御方法。
【請求項2】
前記クリープトルクが発生すると、車両を走行モードに進入させるステップをさらに含むことを特徴とする請求項1に記載の車両のクリープトルク制御方法。
【請求項3】
前記ブレーキの解除される量に反比例して前記クリープトルクが発生することを特徴とする請求項1に記載の車両のクリープトルク制御方法。
【請求項4】
前記車両は、電気車(Electric Vehicle)であることを特徴とする請求項1に記載の車両のクリープトルク制御方法。
【請求項5】
前記車両は、ハイブリッド車両(Hybrid Electric Vehicle)であり、前記ハイブリッド車両は、電気車モードであることを特徴とする請求項1に記載の車両のクリープトルク制御方法。
【請求項6】
前記電気車は、駆動モータを含み、
前記クリープトルクは、前記駆動モータのトルクを制御することにより制御されることを特徴とする請求項4に記載の車両のクリープトルク制御方法。
【請求項7】
前記ハイブリッド車両は、駆動モータを含み、
前記クリープトルクは、前記駆動モータのトルクを制御することにより制御されることを特徴とする請求項5に記載の車両のクリープトルク制御方法。
【請求項8】
前記ブレーキの作動および解除は、ブレーキペダルストロークセンサで感知することを特徴とする請求項1に記載の車両のクリープトルク制御方法。
【請求項9】
車両のクリープトルク制御システムにおいて、
前記車両のブレーキペダルの入力を感知し、その信号を伝送するセンサと、
前記車両のクリープトルクを発生するための電気モータと、
前記センサから前記ブレーキペダルの入力信号を受信し、これに基づいて前記電気モータを制御する制御部とを含み、
前記制御部は、車両の始動状態で、ブレーキの作動により前記車両が停止すると、前記クリープトルクを0に制御し、前記ブレーキが解除されると、前記電気モータを制御してクリープトルクを発生することを特徴とする車両のクリープトルク制御システム。
【請求項10】
前記制御部は、前記ブレーキが解除される量に反比例して前記クリープトルクを発生することを特徴とする請求項9に記載の車両のクリープトルク制御システム。
【請求項11】
前記センサは、ブレーキペダルストロークセンサであることを特徴とする請求項9に記載の車両のクリープトルク制御システム。
【請求項12】
前記車両は、電気車(Electric Vehicle)またはハイブリッド車両(Hybrid Electric Vehicle)であることを特徴とする請求項9に記載の車両のクリープトルク制御システム。
【請求項1】
車両のクリープトルク制御方法において、
車両の始動がかかった状態で、ブレーキの作動により車両を停止させるステップと、
前記車両が停止した状態で、クリープトルクを0に制御するステップと、
前記ブレーキが解除されたか否かを判断するステップと、
前記ブレーキが解除された場合、クリープトルクを発生するステップとを含むことを特徴とする車両のクリープトルク制御方法。
【請求項2】
前記クリープトルクが発生すると、車両を走行モードに進入させるステップをさらに含むことを特徴とする請求項1に記載の車両のクリープトルク制御方法。
【請求項3】
前記ブレーキの解除される量に反比例して前記クリープトルクが発生することを特徴とする請求項1に記載の車両のクリープトルク制御方法。
【請求項4】
前記車両は、電気車(Electric Vehicle)であることを特徴とする請求項1に記載の車両のクリープトルク制御方法。
【請求項5】
前記車両は、ハイブリッド車両(Hybrid Electric Vehicle)であり、前記ハイブリッド車両は、電気車モードであることを特徴とする請求項1に記載の車両のクリープトルク制御方法。
【請求項6】
前記電気車は、駆動モータを含み、
前記クリープトルクは、前記駆動モータのトルクを制御することにより制御されることを特徴とする請求項4に記載の車両のクリープトルク制御方法。
【請求項7】
前記ハイブリッド車両は、駆動モータを含み、
前記クリープトルクは、前記駆動モータのトルクを制御することにより制御されることを特徴とする請求項5に記載の車両のクリープトルク制御方法。
【請求項8】
前記ブレーキの作動および解除は、ブレーキペダルストロークセンサで感知することを特徴とする請求項1に記載の車両のクリープトルク制御方法。
【請求項9】
車両のクリープトルク制御システムにおいて、
前記車両のブレーキペダルの入力を感知し、その信号を伝送するセンサと、
前記車両のクリープトルクを発生するための電気モータと、
前記センサから前記ブレーキペダルの入力信号を受信し、これに基づいて前記電気モータを制御する制御部とを含み、
前記制御部は、車両の始動状態で、ブレーキの作動により前記車両が停止すると、前記クリープトルクを0に制御し、前記ブレーキが解除されると、前記電気モータを制御してクリープトルクを発生することを特徴とする車両のクリープトルク制御システム。
【請求項10】
前記制御部は、前記ブレーキが解除される量に反比例して前記クリープトルクを発生することを特徴とする請求項9に記載の車両のクリープトルク制御システム。
【請求項11】
前記センサは、ブレーキペダルストロークセンサであることを特徴とする請求項9に記載の車両のクリープトルク制御システム。
【請求項12】
前記車両は、電気車(Electric Vehicle)またはハイブリッド車両(Hybrid Electric Vehicle)であることを特徴とする請求項9に記載の車両のクリープトルク制御システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−106511(P2013−106511A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2012−117981(P2012−117981)
【出願日】平成24年5月23日(2012.5.23)
【出願人】(591251636)現代自動車株式会社 (1,064)
【出願人】(500518050)起亞自動車株式会社 (449)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成24年5月23日(2012.5.23)
【出願人】(591251636)現代自動車株式会社 (1,064)
【出願人】(500518050)起亞自動車株式会社 (449)
【Fターム(参考)】
[ Back to top ]