
車両のサラウンドビューシステム
【課題】車両のサラウンドビューシステムおよび車両のサラウンドビューを生成するための方法を提供すること。
【解決手段】上記車両のサラウンドビューシステムは、車両の異なる箇所において提供された複数の画像センサーであって、画像センサーは、車両の完全な周囲を覆う車両周囲の画像データを生成する、複数の画像センサーと、複数の画像センサーの画像データを処理する画像処理ユニットであって、画像処理ユニットは、異なる画像センサーの画像データに基づいて車両のサラウンドビューを生成するように構成され、サラウンドビューを生成するために、画像処理ユニットは、車両を囲むボウル上に画像データを逆に投影する、画像処理ユニットと、画像処理ユニットによって生成されたサラウンドビューを表示するディスプレイと、生成されたサラウンドビューが表示されるビューの位置および角度を変更するマニピュレーターとを含む。
【解決手段】上記車両のサラウンドビューシステムは、車両の異なる箇所において提供された複数の画像センサーであって、画像センサーは、車両の完全な周囲を覆う車両周囲の画像データを生成する、複数の画像センサーと、複数の画像センサーの画像データを処理する画像処理ユニットであって、画像処理ユニットは、異なる画像センサーの画像データに基づいて車両のサラウンドビューを生成するように構成され、サラウンドビューを生成するために、画像処理ユニットは、車両を囲むボウル上に画像データを逆に投影する、画像処理ユニットと、画像処理ユニットによって生成されたサラウンドビューを表示するディスプレイと、生成されたサラウンドビューが表示されるビューの位置および角度を変更するマニピュレーターとを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両のサラウンドビューシステムに関し、車両のサラウンドビューを生成するための方法に関する。
【背景技術】
【0002】
(関連技術)
近年、車両における画像センサーの使用が増加している。しばしば、これらのカメラは、画像センサーが、車両の環境を追跡し、物体を識別し、そして危険な運転状況にいる可能性のあるドライバーを警告し、またはブレーキ等を作動させることによって運転をさえアクティブに制御し得るドライバー支援システムにおいて使用される。さらに、画像センサーは、ドライバーが車両を駐車することを助ける後方ビューカメラとして使用される。さらに、超音波センサーが使用され、物体までの距離を決定することを助け、これらのセンサーは、主に、駐車の状況において支援するために、車両の後方部分において提供される。しかしながら、これらの超音波センサーは、雪の状況において間違った結果を提供し得る。さらに、ブラインドスポットの問題のために、すなわち、ドライバーが車線を変更するつもりであるが、側面ビューミラーのブラインドゾーンに位置している別の車両を見えない状況において、多くの事故が発生する。
【0003】
さらに、車両の後方部分の画像センサーによって提供されたビューが、ドライバーに現実的な空間より多くの空間を有することを暗示するので、後方視覚システムを装備された車両は、接近事故を引き起こすことが観察される。
【発明の概要】
【発明が解決しようとする課題】
【0004】
(要約)
従って、周囲のビューの現実的な印象をユーザーに提供する、車両の完全な周囲を覆う車両のサラウンドビューを提供するニーズが存在する。
【課題を解決するための手段】
【0005】
このニーズは、独立請求項の特徴によって満たされる。従属請求項において、本発明の好ましい実施形態が説明される。
【0006】
本発明の第1の局面に従って、車両のサラウンドビューシステムが提供され、車両のサラウンドビューシステムは、車両の異なる箇所において提供された複数の画像センサーを含み、画像センサーは、車両の完全な周囲を覆う車両周囲の画像データを生成する。さらに、画像処理ユニットが提供され、画像処理ユニットは、複数の画像センサーの画像データを処理し、画像処理ユニットは、異なる画像センサーの画像データに基づいて車両のサラウンドビューを生成するように構成されている。画像処理ユニットは、車両を囲むボウル上に画像データを逆に投影する。ボウルは、実質的に長方形の形状を有する平らな底部を有し、ボウルは、水平スライスで底部上に続き、ボウルの上部スライスは、形状において実質的に楕円である。さらに、ディスプレイが提供され、ディスプレイは、画像処理ユニットによって生成されたサラウンドビューを表示する。さらに、マニピュレーターが提供され、マニピュレーターは、生成されたサラウンドビューが表示されるビューの位置および角度を変更する。サラウンドビューは、ドライバーが車両周囲の概観を得ることを助ける。マニピュレーターを用いて、ドライバーまたは任意の他のユーザーは、車両周囲が表示されるビューの位置および角度を自由に選択し得る。付近にある任意の障害物が早く検出され得る。サラウンドビューは、特に、車両を駐車する場合に、ドライバーを支援するのに使用され得る。さらに、車両のサラウンドビューシステムは、ブラインドスポットの障害物を避けることを助け得る。ボウルの特別な形は、現実的なサラウンドビューを生成することを助ける。車両周囲の概観は、ドライバーが頭を向ける必要がなしに得られる。
【0007】
画像センサーの1つの可能な実装は、170°より大きく、好ましくは、175°以上の水平開口角度を有する魚眼カメラである。好ましくは、4つの魚眼カメラが使用され、車両の4つの側表面に配置され、1つのカメラは、車両の左側面上にあり、もう1つは、右側面上にあり、第3のカメラは、後方にあり、第4のカメラは、車両の前方にある。画像処理ユニットは、異なるカメラによって生成された画像データを組み合わせ、車両の完全な周囲を覆うサラウンドビューを生成する。完全な周囲に関して、カメラは、車両の上または車両の下の空間を直接に検出しない場合もあり、ただし画像センサーは、車両の完全な側面の周囲を覆うことが理解されるべきである。
【0008】
実質的に長方形の形状を有するボウルの平らな底部は、長方形の形状の長辺対短辺の比率は、車両の長さ対車両の幅の比率に比例しているように成形され得る。長辺対短辺の比率は、車両の長さ対車両の幅の比率に比例している場合に、画像データの現実的な表示が得られ得る。この文脈において、実質的に楕円形状の長軸対短軸の比率は、車両の長さ対車両の幅の比率にも比例していることがさらに可能である。
【0009】
好ましくは、ボウルのこの形状は、ボウルの上部から底部へ徐々に、スライスの楕円形状からスライスの長方形の形状へ変化し、長方形の形状は、湾曲した角を有する。湾曲した角は、長方形の形状の角が、楕円形状によって取り替えられているように設計され得る。
【0010】
別の実施形態に従って、楕円形状を有するスライスの断面は、ボウルの底部から上部へ線形に増大する。従って、ボウルの上部からボウルの底部へ移動する場合に、楕円形状を有するスライスの部分は、線形増大し、同時に長方形の形状を有するスライスの部分は、同じ量で減少する。ボウルの底部は、平らであり、グラウンドに接するボウルの部分として規定される。
【0011】
ボウルの垂直断面が関係する限り、底部が平らであるような底部の例外と共に、垂直断面はまた、楕円形状を有し得る。好ましくは、ボウルの垂直断面が関係する限り、垂直断面は、楕円形の垂直断面に続く、ボウルの底部上の線を有し得る。線と楕円形の垂直断面との接続における導関数は、線と楕円の垂直断面との間の接続ポイントにおいて平坦な接続を得るために、同じであるべきである。両方の導関数は、このポイントにおいて、0の値を有し得る。
【0012】
一実施形態において、ボウルがボウルの底部に接するスライスにおいて、楕円の形状を有する断面対上記スライスの全長の比率が、0.6と0.8との間であり、好ましくは0.65と0.75との間であり、より好ましくは約0.7であるように、ボウルが成形されている。自身のグラウンド平面、ボウルの底部上に、比率は、再び線形に減少され得、その結果、楕円形状を有する断面対スライスの全長は、約1%までに減少される。この湾曲した長方形は、既に車両の体積より少し小さな表面を有し得る。
【0013】
ボウルの形状が変更され得る。例として、画像処理ユニットは、ボウルの底部の大きさを変更し得、底部のこの変更は、サラウンドビューシステムのユーザーによって動作されている車両のサラウンドビューシステムのマニピュレーターを用いて達成され得る。
【0014】
特に、駐車応用において、ボウルの底部の大きさを増大することが有益であり得る。駐車の状況において、グラウンド上に配置された物体の全部が、少しの歪みと共に、正しい箇所において表示されることが有用であり得る。物体がグラウンドに配置された場合、かつボウルが平らな底部を有する場合に、物体が正しく視覚化される。従って、優れた視覚的知覚は、グラウンド上に配置された物体に対して得られ得る。
【0015】
車両のサラウンドビューシステムは、インターフェースをさらに含み得、車両周囲に配置された物体の距離情報が、インターフェースを介して受信される。次に、画像処理ユニットは、車両のサラウンドビューにおいて示されている物体の位置を校正するために、受信された距離情報を使用し得る。例として、車両のサラウンドビューシステムは、3Dセンサー、例えば、PMDセンサーから距離情報を受信し得、PMDセンサーは、PMDセンサーの画像平面において配置されている物体の距離情報を提供する。次に、画像処理ユニットは、サラウンドビューの画像データにおいて物体を正しく設置し得る。
【0016】
別の実施形態において、画像処理ユニットは、他のセンサーによって提供された距離情報なしに、サラウンドビューにおいて示される物体の距離を決定し得る。例として、サラウンドビューにおいて示される物体の距離は、車両が移動している場合に、車両のサラウンドビューにおける物体の動きに基づいて決定され得る。車両が移動している場合に、サラウンドビューおよび物体は、物体の光学フローを生成するように移動している。車両までの物体の距離がより長ければ、サラウンドビューにおいて移動している物体の速度は、より小さい。移動している物体の速度に基づいて、距離は、例えば、物体の速度を所定のセットの物体速度を含む表と比較することと物体の対応する距離とによって推定され得る。
【0017】
本発明はさらに、サラウンドビューを生成するための方法に関し、複数のセンサーの画像データは、前述のように処理され、ユーザーに表示され、次に、ユーザーは、生成されたサラウンドビューがユーザーの入力に従って表示されるビューの位置および角度を変更し得る。従って、ユーザーは、頭を回転することなしに、完全な車両周囲の概観を有し得る。
【0018】
本発明は、例えば以下の項目を提供する。
(項目1)
車両のサラウンドビューシステムであって、該車両のサラウンドビューシステムは、
該車両(10)の異なる箇所において提供された複数の画像センサー(11)であって、該画像センサー(11)は、該車両の完全な周囲を覆う該車両周囲の画像データを生成する、該複数の画像センサーと、
該複数の画像センサー(11)の該画像データを処理する画像処理ユニット(20)であって、該画像処理ユニット(20)は、該異なる画像センサー(11)の該画像データに基づいて該車両の該サラウンドビューを生成するように構成され、該サラウンドビューを生成するために、該画像処理ユニット(20)は、該車両を囲むボウル(100)上に該画像データを逆に投影し、該ボウルは、実質的に長方形の形状を有する平らな底部を有し、該ボウルは、水平スライスで該底部上に続き、該ボウルの上部スライスは、形状において実質的に楕円である、画像処理ユニットと、
該画像処理ユニットによって生成された該サラウンドビューを表示するディスプレイと、
該生成されたサラウンドビューが表示されるビューの位置および角度を変更するマニピュレーター(40)と
を含む、車両のサラウンドビューシステム。
(項目2)
上記長方形の形状の長辺対短辺の比率は、上記車両の長さ対該車両の幅の比率に比例している、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目3)
上記実質的に楕円形状の長軸対短軸の比率は、上記車両の長さ対該車両の幅の比率に比例している、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目4)
上記ボウル(100)の上記形状は、該ボウルの上記上部から上記底部へ徐々に、上記スライスの楕円形状から湾曲した角を有する該スライスの長方形の形状へ変化する、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目5)
上記ボウル(100)の上記形状は、上記上部から上記底部へ、上記スライスの楕円形状から該スライスの長方形の形状へ変化し、該長方形の形状の角が、該楕円形状によって取り替えられている、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目6)
楕円形状を有する上記スライスの断面は、上記ボウル(100)の上記底部から上記上部へ線形に増大する、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目7)
上記底部の例外と共に、上記ボウルの上記垂直断面は、形状において楕円である、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目8)
上記ボウル(100)の上記垂直断面は、上記楕円形の垂直断面に続く、該ボウルの上記底部上の線を含み、該線と該楕円形の垂直断面との接続における勾配は、80°と100°との間であり、好ましくは、約90°である、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目9)
上記ボウルが該ボウルの上記底部に接するスライスにおいて、楕円の形状を有する上記断面対該スライスの全長の比率は、0.6と0.8との間であり、好ましくは0.65と0.75との間であり、より好ましくは0.7である、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目10)
上記画像処理ユニット(20)は、上記ボウルの上記底部の大きさを変更するように構成される、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目11)
上記車両のサラウンドビューシステムは、インターフェース(22)をさらに含み、上記車両周囲に配置された物体の距離情報が、該インターフェースを介して受信され、上記画像処理ユニット(20)は、該車両の上記サラウンドビューにおいて示されている物体の位置を校正するために、受信された距離情報を使用する、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目12)
上記画像処理ユニット(20)は、上記車両が移動している場合に、該車両の上記サラウンドビューにおける物体の動きに基づいて、該車両に関連する該車両の該サラウンドビューにおいて示される該物体の距離を決定するように構成される、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目13)
上記画像センサー(11)は、170°より大きな水平開口角度を有する魚眼カメラである、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目14)
車両の異なる箇所において提供された複数の画像センサーを用いて該車両のサラウンドビューを生成するための方法であって、該画像センサーは、該車両の完全な周囲を覆う該車両周囲の画像データを生成し、該方法は、
該異なる画像センサーの該画像データに基づいて、該車両の該サラウンドビューを生成するために、該複数の画像センサーの該画像データを処理するステップであって、該画像データは、該車両を囲むボウル上に逆に投影され、該ボウルは、実質的に長方形の形状を有する平らな底部を有し、該ボウルは、水平スライスを用いて該底部上に続き、該ボウルの上部スライスは、形状において実質的に楕円である、ステップと
該画像処理ユニットによって生成された該サラウンドビューを表示するステップと、
該生成されたサラウンドビューがユーザー入力に従って表示されているビューの位置および角度を変更するステップと
を含む、方法。
【0019】
(摘要)
本発明は、車両のサラウンドビューシステムに関し、車両のサラウンドビューシステムは、車両の異なる箇所において提供された複数の画像センサーであって、画像センサーは、車両の完全な周囲を覆う車両周囲の画像データを生成する、複数の画像センサーと、複数の画像センサーの画像データを処理する画像処理ユニットであって、画像処理ユニットは、異なる画像センサーの画像データに基づいて車両のサラウンドビューを生成するように構成され、サラウンドビューを生成するために、画像処理ユニットは、車両を囲むボウル上に画像データを逆に投影し、ボウルは、実質的に長方形の形状を有する平らな底部を有し、ボウルは、水平スライスで底部上に続き、ボウルの上部スライスは、形状において実質的に楕円である、画像処理ユニットと、画像処理ユニットによって生成されたサラウンドビューを表示するディスプレイと、生成されたサラウンドビューが表示されるビューの位置および角度を変更するマニピュレーターとを含む。
【0020】
本発明は、添付の図面に参照してさらなる詳細に説明される。
【図面の簡単な説明】
【0021】
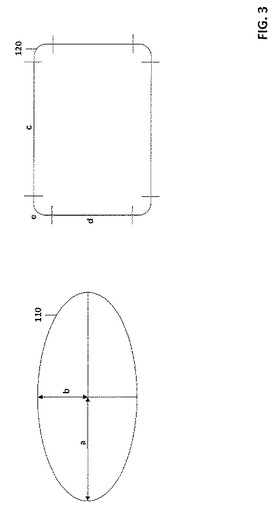
【図1】図1は、車両に組み込まれた車両のサラウンドビューシステムの概略図を示す。
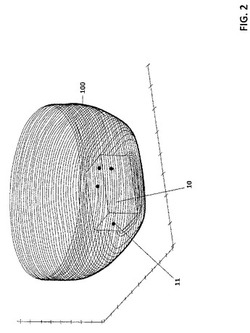
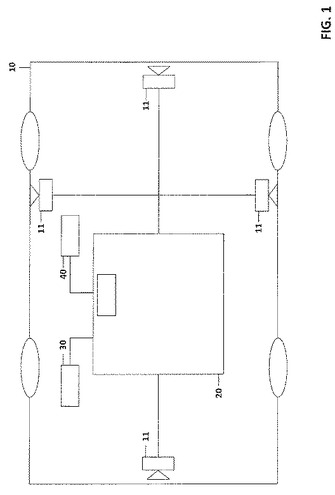
【図2】図2は、4つのカメラを有する車両と車両を囲むボウルへの関連との概略図を示す。
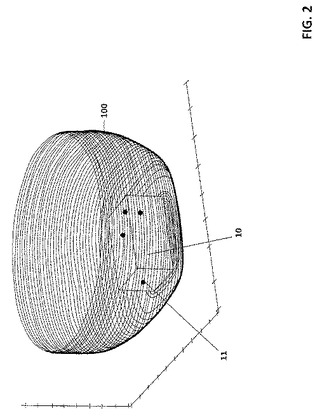
【図3】図3は、図2に示されたボウルの2つの異なるスライスを示す。
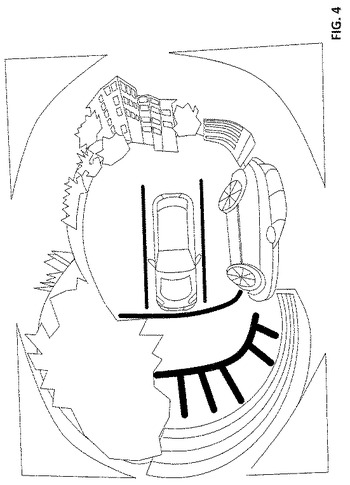
【図4】図4は、図1に示されたシステムを用いて生成された車両の周囲の鳥瞰図を示す。
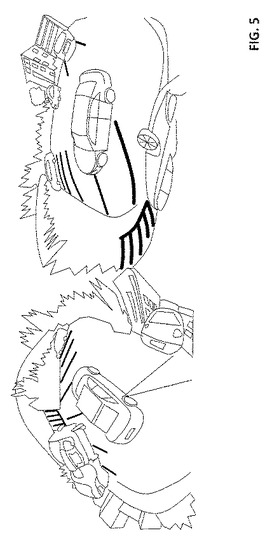
【図5】図5は、図1に示されたシステムをよって生成されたビューの別の角度を用いて別のサラウンドビューを示す。
【発明を実施するための形態】
【0022】
(詳細な説明)
図1において、4つの魚眼カメラ11が組み込まれている車両10が示されている。画像センサーまたはカメラは、車両の全周において系統的に設置されている魚眼カメラであり、それによりそれらは、完全な周囲の全周を覆う。例として、側面のカメラは、左および右のドアミラーにおいて提供され得る。後方および前方カメラは、車両のタイプに依存して異なる箇所に配置され得る。車両のサラウンドビューシステムは、異なるカメラによって生成された画像データを受信する画像処理ユニット20をさらに含み、画像処理ユニット20は、サラウンドビューが生成されるように画像データを融合する。より具体的には、カメラは、広角レンズである魚眼レンズを有し得る。既に既知であるように、これらの魚眼レンズは、周囲の歪んだ画像を生成する。画像処理ユニットは、生成されたサラウンドビューの画像がディスプレイ30上に表示され得るように、異なる画像を組み合わせる。さらに、マニピュレーター40が提供され得、ビューの位置および角度が、マニピュレーター40を用いて変更され得る。サラウンドビューシステムを用いて、車両周囲のどこかに配置された仮想ユーザーに対応して、車両周囲のビューが生成され得る。例として、仮想ユーザーの1つの可能な位置は、車両の周囲が車両の上から見られる鳥瞰図を生成するために、車両の上にある。処理ユニットは、第1のインターフェース21を含み得、マニピュレーターからの信号は、第1のインターフェース21を介して受信され、処理ユニットは、第1のインターフェース21を用いて、サラウンドビューがどのビューの角度および位置から生成されるべきであることを示す詳細な情報を受信する。処理ユニット20はさらに、第2のインターフェース22を含み得、他のセンサーからの信号、例えば、車両の周囲に配置された物体までの距離を測定するセンサー、例えば、PMDセンサー、超音波センサー、レーダーセンサー等からの信号は、第2のインターフェース22を介して受信され得る。
【0023】
図2に関連して、サラウンドビューの生成がより詳細に説明される。異なるカメラ11によって生成された画像データは、車両10を囲むボウル100上に融合され、かつ逆に投影される。車両は、ボウルの底部またはグラウンドフロア上に配置される。生成されたサラウンドビューにおいて、ボウルの形状は、表示されたサラウンドビューにとって重要である。車両が長方形の形を有し、かつ二次方程式ではないので、ボウルの形状は、図2から理解され得るように、車両の軸に沿って伸ばされている。ボウルは、異なる水平スライスから構成される。水平スライスは、楕円の形状を有し、主軸対副軸の比率は、車両の長さ対幅の比率に比例している。上部スライスは、単に図3の左部分に示されるような楕円の形状を有し得、ボウルの上部スライス110は、長軸aおよび短軸bを用いて概略的に示される。スライスの形状は、楕円の形状から図3の右部分に示される湾曲した長方形へ徐々に変化し、ボウルの底部は、最小の円周を有するように示される。2つのスライスの間に配置されるボウル上のポイントは、2つの隣接のスライス上に配置されたポイントの位置を用いて補間される。車両の表面より少し小さくあり得る表面を有する最小のスライスは、スライスが長方形の形状を有する最小のスライスの断面cおよびdが、全円周の99%を表すように指定される。スライス120のエッジのみは、湾曲であり得、形状において楕円であり得る。ボウルの底部は、追加の増大されたスライスを有し、最後のスライスにおいて、ボウルは、底部に接する。楕円の形状を有する全長の部分は、約70%であり得る。以下のパラメータAは、水平スライスのメインパラメータであり、
【0024】
【化1】

に従うように規定される。
【0025】
楕円部分は、スライスの湾曲した部分の長さであり、長方形部分は、スライスの線形部分である。Aは、ボウルの上部スライスにおいて1であり得、これは、形状が単に楕円であることを意味する。1が平行の水平スライスにくり下げる場合に、パラメータAは、ボウルがグラウンド平面に接するまでに線形に減少され得、そこで、Aは、前述のように約0.7であり得る。グラウンド平面上において、比率はさらに、約0.01の最小値まで線形に減少され得る。図3に参照して、これは、断面eのみがスライス120の全長の1%を構成し得ることを意味し得る。上から導かれ得るように、平らな表面を有するボウルの底部の表面は、車両の表面より大きい。
【0026】
ボウルの垂直のカットは、カットが単に線であるグラウンド平面上を除いて、再び楕円の形状を提供する。線との接続において楕円の導関数は、0°であり、このポイントにおいて線の導関数に対応する。これは、楕円の側表面とグラウンド平面との間の平坦な接続を可能にする。この平坦な接続は、ボウルの一部分に投影される物体の優れた視覚的知覚を生成することにとって有用であり、そこで、ボウルがグラウンドに接する。
【0027】
図2に示されるボウルの上に直接に配置された車両の周囲のポイントは、画像処理ユニットによって生成されたサラウンドビューにおいて正しく視覚化される。ボウルの内側または外側に配置されたポイントが、歪みと共に表示され、それにもかかわらず、ボウルの特別の形状は、ユーザーに対して完璧な視覚的知覚を提供する。ボウル底部上のポイントが、グラウンド平面上に投影される。これは、グラウンド平面上に配置されている全部のポイント、例えば、道路記号が、正しくマップ化される効果を有する。さらに、湾曲した長方形であるボウルの底部は、また長方形である車両の形状にマッチする。完全なボウルは、刻み込まれた球体の形を有する。この球体は、最も自然の形であり、車両の周囲の形状の空間のどこかの仮想ユーザーによるビューの位置または角度が、位置を変化する場合に、車両のサラウンドビューの平坦な変化が得られ得る。さらに、垂直の断面の楕円形状は、再びユーザーのための視覚的知覚を向上させる、底部を有するボウルの平坦なジャンクションを保証する。
【0028】
図4において、サラウンドビューの例としての鳥瞰図が示される。理解され得るように、フロア上に配置されたポイントは、サラウンドビューの画像のフロア上に正しく配置されている。さらに、ユーザーは、使用の間に、投影ボウルの形状を動的に変更し得る。これは、ドライバーが、サラウンドビューが必要とされる異なる例に対して柔軟に反応することを可能にする。例として、サラウンドビューのより多くの画像ピクセルが画像平面に投影され、車両の周りのグラウンドフロアのより大きな部分が見えることを意味するより大きなボウル底部を作ることが可能である。
【0029】
サラウンドビューはまた、運転の間に、例えば、高速道路上に適用され得る。ドライバーは、頭を回転することが必要なしに、側面ミラーを見る必要なしに、車線記号および近隣の物体を観測し得る。従って、サラウンドビューは、追い越す間に、または高速道路に出入りする場合に車線を変更するために、所定の車線を保つように使用され得る。これらの全部の応用において、隣接する物体の優れた概観は、物体を見落とすことを避けるのに有用である。
【0030】
さらに、車両のサラウンドビューシステムを他のセンサーと組み合わせることが可能である。実行されるさらなる画像処理がない場合に、表示された物体の実際距離が知られない。従って、ボウル上に実際に配置されたポイントのみが正しく投影される。他の物体までの距離が既知であった場合に、修正は、表示された物体をボウル上にマップ化するために使用されたマッピング機能で行われ得、視覚的知覚が向上され得る。物体までの距離を測定するセンサーとして、レーダーセンサー、PMDセンサーまたは超音波センサーが使用され得る。
【0031】
車両が移動している場合、かつ同時にサラウンドビューが表示されている場合に、光学フローが生成される。光学フローは、物体までの距離を推定するために使用され得る。従って、本実施形態において、追加のセンサーの必要なしに、画像処理ユニットによって生成されたサラウンドビューのみを用いて、物体の距離または物体の位置を決定することが可能である。移動している車両の場合における距離のこの決定はさらに、表示されたサラウンドビューを向上させ得る。
【符号の説明】
【0032】
10 車両
11 魚眼カメラ
100 ボウル
【技術分野】
【0001】
本発明は、車両のサラウンドビューシステムに関し、車両のサラウンドビューを生成するための方法に関する。
【背景技術】
【0002】
(関連技術)
近年、車両における画像センサーの使用が増加している。しばしば、これらのカメラは、画像センサーが、車両の環境を追跡し、物体を識別し、そして危険な運転状況にいる可能性のあるドライバーを警告し、またはブレーキ等を作動させることによって運転をさえアクティブに制御し得るドライバー支援システムにおいて使用される。さらに、画像センサーは、ドライバーが車両を駐車することを助ける後方ビューカメラとして使用される。さらに、超音波センサーが使用され、物体までの距離を決定することを助け、これらのセンサーは、主に、駐車の状況において支援するために、車両の後方部分において提供される。しかしながら、これらの超音波センサーは、雪の状況において間違った結果を提供し得る。さらに、ブラインドスポットの問題のために、すなわち、ドライバーが車線を変更するつもりであるが、側面ビューミラーのブラインドゾーンに位置している別の車両を見えない状況において、多くの事故が発生する。
【0003】
さらに、車両の後方部分の画像センサーによって提供されたビューが、ドライバーに現実的な空間より多くの空間を有することを暗示するので、後方視覚システムを装備された車両は、接近事故を引き起こすことが観察される。
【発明の概要】
【発明が解決しようとする課題】
【0004】
(要約)
従って、周囲のビューの現実的な印象をユーザーに提供する、車両の完全な周囲を覆う車両のサラウンドビューを提供するニーズが存在する。
【課題を解決するための手段】
【0005】
このニーズは、独立請求項の特徴によって満たされる。従属請求項において、本発明の好ましい実施形態が説明される。
【0006】
本発明の第1の局面に従って、車両のサラウンドビューシステムが提供され、車両のサラウンドビューシステムは、車両の異なる箇所において提供された複数の画像センサーを含み、画像センサーは、車両の完全な周囲を覆う車両周囲の画像データを生成する。さらに、画像処理ユニットが提供され、画像処理ユニットは、複数の画像センサーの画像データを処理し、画像処理ユニットは、異なる画像センサーの画像データに基づいて車両のサラウンドビューを生成するように構成されている。画像処理ユニットは、車両を囲むボウル上に画像データを逆に投影する。ボウルは、実質的に長方形の形状を有する平らな底部を有し、ボウルは、水平スライスで底部上に続き、ボウルの上部スライスは、形状において実質的に楕円である。さらに、ディスプレイが提供され、ディスプレイは、画像処理ユニットによって生成されたサラウンドビューを表示する。さらに、マニピュレーターが提供され、マニピュレーターは、生成されたサラウンドビューが表示されるビューの位置および角度を変更する。サラウンドビューは、ドライバーが車両周囲の概観を得ることを助ける。マニピュレーターを用いて、ドライバーまたは任意の他のユーザーは、車両周囲が表示されるビューの位置および角度を自由に選択し得る。付近にある任意の障害物が早く検出され得る。サラウンドビューは、特に、車両を駐車する場合に、ドライバーを支援するのに使用され得る。さらに、車両のサラウンドビューシステムは、ブラインドスポットの障害物を避けることを助け得る。ボウルの特別な形は、現実的なサラウンドビューを生成することを助ける。車両周囲の概観は、ドライバーが頭を向ける必要がなしに得られる。
【0007】
画像センサーの1つの可能な実装は、170°より大きく、好ましくは、175°以上の水平開口角度を有する魚眼カメラである。好ましくは、4つの魚眼カメラが使用され、車両の4つの側表面に配置され、1つのカメラは、車両の左側面上にあり、もう1つは、右側面上にあり、第3のカメラは、後方にあり、第4のカメラは、車両の前方にある。画像処理ユニットは、異なるカメラによって生成された画像データを組み合わせ、車両の完全な周囲を覆うサラウンドビューを生成する。完全な周囲に関して、カメラは、車両の上または車両の下の空間を直接に検出しない場合もあり、ただし画像センサーは、車両の完全な側面の周囲を覆うことが理解されるべきである。
【0008】
実質的に長方形の形状を有するボウルの平らな底部は、長方形の形状の長辺対短辺の比率は、車両の長さ対車両の幅の比率に比例しているように成形され得る。長辺対短辺の比率は、車両の長さ対車両の幅の比率に比例している場合に、画像データの現実的な表示が得られ得る。この文脈において、実質的に楕円形状の長軸対短軸の比率は、車両の長さ対車両の幅の比率にも比例していることがさらに可能である。
【0009】
好ましくは、ボウルのこの形状は、ボウルの上部から底部へ徐々に、スライスの楕円形状からスライスの長方形の形状へ変化し、長方形の形状は、湾曲した角を有する。湾曲した角は、長方形の形状の角が、楕円形状によって取り替えられているように設計され得る。
【0010】
別の実施形態に従って、楕円形状を有するスライスの断面は、ボウルの底部から上部へ線形に増大する。従って、ボウルの上部からボウルの底部へ移動する場合に、楕円形状を有するスライスの部分は、線形増大し、同時に長方形の形状を有するスライスの部分は、同じ量で減少する。ボウルの底部は、平らであり、グラウンドに接するボウルの部分として規定される。
【0011】
ボウルの垂直断面が関係する限り、底部が平らであるような底部の例外と共に、垂直断面はまた、楕円形状を有し得る。好ましくは、ボウルの垂直断面が関係する限り、垂直断面は、楕円形の垂直断面に続く、ボウルの底部上の線を有し得る。線と楕円形の垂直断面との接続における導関数は、線と楕円の垂直断面との間の接続ポイントにおいて平坦な接続を得るために、同じであるべきである。両方の導関数は、このポイントにおいて、0の値を有し得る。
【0012】
一実施形態において、ボウルがボウルの底部に接するスライスにおいて、楕円の形状を有する断面対上記スライスの全長の比率が、0.6と0.8との間であり、好ましくは0.65と0.75との間であり、より好ましくは約0.7であるように、ボウルが成形されている。自身のグラウンド平面、ボウルの底部上に、比率は、再び線形に減少され得、その結果、楕円形状を有する断面対スライスの全長は、約1%までに減少される。この湾曲した長方形は、既に車両の体積より少し小さな表面を有し得る。
【0013】
ボウルの形状が変更され得る。例として、画像処理ユニットは、ボウルの底部の大きさを変更し得、底部のこの変更は、サラウンドビューシステムのユーザーによって動作されている車両のサラウンドビューシステムのマニピュレーターを用いて達成され得る。
【0014】
特に、駐車応用において、ボウルの底部の大きさを増大することが有益であり得る。駐車の状況において、グラウンド上に配置された物体の全部が、少しの歪みと共に、正しい箇所において表示されることが有用であり得る。物体がグラウンドに配置された場合、かつボウルが平らな底部を有する場合に、物体が正しく視覚化される。従って、優れた視覚的知覚は、グラウンド上に配置された物体に対して得られ得る。
【0015】
車両のサラウンドビューシステムは、インターフェースをさらに含み得、車両周囲に配置された物体の距離情報が、インターフェースを介して受信される。次に、画像処理ユニットは、車両のサラウンドビューにおいて示されている物体の位置を校正するために、受信された距離情報を使用し得る。例として、車両のサラウンドビューシステムは、3Dセンサー、例えば、PMDセンサーから距離情報を受信し得、PMDセンサーは、PMDセンサーの画像平面において配置されている物体の距離情報を提供する。次に、画像処理ユニットは、サラウンドビューの画像データにおいて物体を正しく設置し得る。
【0016】
別の実施形態において、画像処理ユニットは、他のセンサーによって提供された距離情報なしに、サラウンドビューにおいて示される物体の距離を決定し得る。例として、サラウンドビューにおいて示される物体の距離は、車両が移動している場合に、車両のサラウンドビューにおける物体の動きに基づいて決定され得る。車両が移動している場合に、サラウンドビューおよび物体は、物体の光学フローを生成するように移動している。車両までの物体の距離がより長ければ、サラウンドビューにおいて移動している物体の速度は、より小さい。移動している物体の速度に基づいて、距離は、例えば、物体の速度を所定のセットの物体速度を含む表と比較することと物体の対応する距離とによって推定され得る。
【0017】
本発明はさらに、サラウンドビューを生成するための方法に関し、複数のセンサーの画像データは、前述のように処理され、ユーザーに表示され、次に、ユーザーは、生成されたサラウンドビューがユーザーの入力に従って表示されるビューの位置および角度を変更し得る。従って、ユーザーは、頭を回転することなしに、完全な車両周囲の概観を有し得る。
【0018】
本発明は、例えば以下の項目を提供する。
(項目1)
車両のサラウンドビューシステムであって、該車両のサラウンドビューシステムは、
該車両(10)の異なる箇所において提供された複数の画像センサー(11)であって、該画像センサー(11)は、該車両の完全な周囲を覆う該車両周囲の画像データを生成する、該複数の画像センサーと、
該複数の画像センサー(11)の該画像データを処理する画像処理ユニット(20)であって、該画像処理ユニット(20)は、該異なる画像センサー(11)の該画像データに基づいて該車両の該サラウンドビューを生成するように構成され、該サラウンドビューを生成するために、該画像処理ユニット(20)は、該車両を囲むボウル(100)上に該画像データを逆に投影し、該ボウルは、実質的に長方形の形状を有する平らな底部を有し、該ボウルは、水平スライスで該底部上に続き、該ボウルの上部スライスは、形状において実質的に楕円である、画像処理ユニットと、
該画像処理ユニットによって生成された該サラウンドビューを表示するディスプレイと、
該生成されたサラウンドビューが表示されるビューの位置および角度を変更するマニピュレーター(40)と
を含む、車両のサラウンドビューシステム。
(項目2)
上記長方形の形状の長辺対短辺の比率は、上記車両の長さ対該車両の幅の比率に比例している、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目3)
上記実質的に楕円形状の長軸対短軸の比率は、上記車両の長さ対該車両の幅の比率に比例している、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目4)
上記ボウル(100)の上記形状は、該ボウルの上記上部から上記底部へ徐々に、上記スライスの楕円形状から湾曲した角を有する該スライスの長方形の形状へ変化する、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目5)
上記ボウル(100)の上記形状は、上記上部から上記底部へ、上記スライスの楕円形状から該スライスの長方形の形状へ変化し、該長方形の形状の角が、該楕円形状によって取り替えられている、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目6)
楕円形状を有する上記スライスの断面は、上記ボウル(100)の上記底部から上記上部へ線形に増大する、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目7)
上記底部の例外と共に、上記ボウルの上記垂直断面は、形状において楕円である、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目8)
上記ボウル(100)の上記垂直断面は、上記楕円形の垂直断面に続く、該ボウルの上記底部上の線を含み、該線と該楕円形の垂直断面との接続における勾配は、80°と100°との間であり、好ましくは、約90°である、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目9)
上記ボウルが該ボウルの上記底部に接するスライスにおいて、楕円の形状を有する上記断面対該スライスの全長の比率は、0.6と0.8との間であり、好ましくは0.65と0.75との間であり、より好ましくは0.7である、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目10)
上記画像処理ユニット(20)は、上記ボウルの上記底部の大きさを変更するように構成される、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目11)
上記車両のサラウンドビューシステムは、インターフェース(22)をさらに含み、上記車両周囲に配置された物体の距離情報が、該インターフェースを介して受信され、上記画像処理ユニット(20)は、該車両の上記サラウンドビューにおいて示されている物体の位置を校正するために、受信された距離情報を使用する、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目12)
上記画像処理ユニット(20)は、上記車両が移動している場合に、該車両の上記サラウンドビューにおける物体の動きに基づいて、該車両に関連する該車両の該サラウンドビューにおいて示される該物体の距離を決定するように構成される、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目13)
上記画像センサー(11)は、170°より大きな水平開口角度を有する魚眼カメラである、上記項目のいずれかに記載の車両のサラウンドビューシステム。
(項目14)
車両の異なる箇所において提供された複数の画像センサーを用いて該車両のサラウンドビューを生成するための方法であって、該画像センサーは、該車両の完全な周囲を覆う該車両周囲の画像データを生成し、該方法は、
該異なる画像センサーの該画像データに基づいて、該車両の該サラウンドビューを生成するために、該複数の画像センサーの該画像データを処理するステップであって、該画像データは、該車両を囲むボウル上に逆に投影され、該ボウルは、実質的に長方形の形状を有する平らな底部を有し、該ボウルは、水平スライスを用いて該底部上に続き、該ボウルの上部スライスは、形状において実質的に楕円である、ステップと
該画像処理ユニットによって生成された該サラウンドビューを表示するステップと、
該生成されたサラウンドビューがユーザー入力に従って表示されているビューの位置および角度を変更するステップと
を含む、方法。
【0019】
(摘要)
本発明は、車両のサラウンドビューシステムに関し、車両のサラウンドビューシステムは、車両の異なる箇所において提供された複数の画像センサーであって、画像センサーは、車両の完全な周囲を覆う車両周囲の画像データを生成する、複数の画像センサーと、複数の画像センサーの画像データを処理する画像処理ユニットであって、画像処理ユニットは、異なる画像センサーの画像データに基づいて車両のサラウンドビューを生成するように構成され、サラウンドビューを生成するために、画像処理ユニットは、車両を囲むボウル上に画像データを逆に投影し、ボウルは、実質的に長方形の形状を有する平らな底部を有し、ボウルは、水平スライスで底部上に続き、ボウルの上部スライスは、形状において実質的に楕円である、画像処理ユニットと、画像処理ユニットによって生成されたサラウンドビューを表示するディスプレイと、生成されたサラウンドビューが表示されるビューの位置および角度を変更するマニピュレーターとを含む。
【0020】
本発明は、添付の図面に参照してさらなる詳細に説明される。
【図面の簡単な説明】
【0021】
【図1】図1は、車両に組み込まれた車両のサラウンドビューシステムの概略図を示す。
【図2】図2は、4つのカメラを有する車両と車両を囲むボウルへの関連との概略図を示す。
【図3】図3は、図2に示されたボウルの2つの異なるスライスを示す。
【図4】図4は、図1に示されたシステムを用いて生成された車両の周囲の鳥瞰図を示す。
【図5】図5は、図1に示されたシステムをよって生成されたビューの別の角度を用いて別のサラウンドビューを示す。
【発明を実施するための形態】
【0022】
(詳細な説明)
図1において、4つの魚眼カメラ11が組み込まれている車両10が示されている。画像センサーまたはカメラは、車両の全周において系統的に設置されている魚眼カメラであり、それによりそれらは、完全な周囲の全周を覆う。例として、側面のカメラは、左および右のドアミラーにおいて提供され得る。後方および前方カメラは、車両のタイプに依存して異なる箇所に配置され得る。車両のサラウンドビューシステムは、異なるカメラによって生成された画像データを受信する画像処理ユニット20をさらに含み、画像処理ユニット20は、サラウンドビューが生成されるように画像データを融合する。より具体的には、カメラは、広角レンズである魚眼レンズを有し得る。既に既知であるように、これらの魚眼レンズは、周囲の歪んだ画像を生成する。画像処理ユニットは、生成されたサラウンドビューの画像がディスプレイ30上に表示され得るように、異なる画像を組み合わせる。さらに、マニピュレーター40が提供され得、ビューの位置および角度が、マニピュレーター40を用いて変更され得る。サラウンドビューシステムを用いて、車両周囲のどこかに配置された仮想ユーザーに対応して、車両周囲のビューが生成され得る。例として、仮想ユーザーの1つの可能な位置は、車両の周囲が車両の上から見られる鳥瞰図を生成するために、車両の上にある。処理ユニットは、第1のインターフェース21を含み得、マニピュレーターからの信号は、第1のインターフェース21を介して受信され、処理ユニットは、第1のインターフェース21を用いて、サラウンドビューがどのビューの角度および位置から生成されるべきであることを示す詳細な情報を受信する。処理ユニット20はさらに、第2のインターフェース22を含み得、他のセンサーからの信号、例えば、車両の周囲に配置された物体までの距離を測定するセンサー、例えば、PMDセンサー、超音波センサー、レーダーセンサー等からの信号は、第2のインターフェース22を介して受信され得る。
【0023】
図2に関連して、サラウンドビューの生成がより詳細に説明される。異なるカメラ11によって生成された画像データは、車両10を囲むボウル100上に融合され、かつ逆に投影される。車両は、ボウルの底部またはグラウンドフロア上に配置される。生成されたサラウンドビューにおいて、ボウルの形状は、表示されたサラウンドビューにとって重要である。車両が長方形の形を有し、かつ二次方程式ではないので、ボウルの形状は、図2から理解され得るように、車両の軸に沿って伸ばされている。ボウルは、異なる水平スライスから構成される。水平スライスは、楕円の形状を有し、主軸対副軸の比率は、車両の長さ対幅の比率に比例している。上部スライスは、単に図3の左部分に示されるような楕円の形状を有し得、ボウルの上部スライス110は、長軸aおよび短軸bを用いて概略的に示される。スライスの形状は、楕円の形状から図3の右部分に示される湾曲した長方形へ徐々に変化し、ボウルの底部は、最小の円周を有するように示される。2つのスライスの間に配置されるボウル上のポイントは、2つの隣接のスライス上に配置されたポイントの位置を用いて補間される。車両の表面より少し小さくあり得る表面を有する最小のスライスは、スライスが長方形の形状を有する最小のスライスの断面cおよびdが、全円周の99%を表すように指定される。スライス120のエッジのみは、湾曲であり得、形状において楕円であり得る。ボウルの底部は、追加の増大されたスライスを有し、最後のスライスにおいて、ボウルは、底部に接する。楕円の形状を有する全長の部分は、約70%であり得る。以下のパラメータAは、水平スライスのメインパラメータであり、
【0024】
【化1】
に従うように規定される。
【0025】
楕円部分は、スライスの湾曲した部分の長さであり、長方形部分は、スライスの線形部分である。Aは、ボウルの上部スライスにおいて1であり得、これは、形状が単に楕円であることを意味する。1が平行の水平スライスにくり下げる場合に、パラメータAは、ボウルがグラウンド平面に接するまでに線形に減少され得、そこで、Aは、前述のように約0.7であり得る。グラウンド平面上において、比率はさらに、約0.01の最小値まで線形に減少され得る。図3に参照して、これは、断面eのみがスライス120の全長の1%を構成し得ることを意味し得る。上から導かれ得るように、平らな表面を有するボウルの底部の表面は、車両の表面より大きい。
【0026】
ボウルの垂直のカットは、カットが単に線であるグラウンド平面上を除いて、再び楕円の形状を提供する。線との接続において楕円の導関数は、0°であり、このポイントにおいて線の導関数に対応する。これは、楕円の側表面とグラウンド平面との間の平坦な接続を可能にする。この平坦な接続は、ボウルの一部分に投影される物体の優れた視覚的知覚を生成することにとって有用であり、そこで、ボウルがグラウンドに接する。
【0027】
図2に示されるボウルの上に直接に配置された車両の周囲のポイントは、画像処理ユニットによって生成されたサラウンドビューにおいて正しく視覚化される。ボウルの内側または外側に配置されたポイントが、歪みと共に表示され、それにもかかわらず、ボウルの特別の形状は、ユーザーに対して完璧な視覚的知覚を提供する。ボウル底部上のポイントが、グラウンド平面上に投影される。これは、グラウンド平面上に配置されている全部のポイント、例えば、道路記号が、正しくマップ化される効果を有する。さらに、湾曲した長方形であるボウルの底部は、また長方形である車両の形状にマッチする。完全なボウルは、刻み込まれた球体の形を有する。この球体は、最も自然の形であり、車両の周囲の形状の空間のどこかの仮想ユーザーによるビューの位置または角度が、位置を変化する場合に、車両のサラウンドビューの平坦な変化が得られ得る。さらに、垂直の断面の楕円形状は、再びユーザーのための視覚的知覚を向上させる、底部を有するボウルの平坦なジャンクションを保証する。
【0028】
図4において、サラウンドビューの例としての鳥瞰図が示される。理解され得るように、フロア上に配置されたポイントは、サラウンドビューの画像のフロア上に正しく配置されている。さらに、ユーザーは、使用の間に、投影ボウルの形状を動的に変更し得る。これは、ドライバーが、サラウンドビューが必要とされる異なる例に対して柔軟に反応することを可能にする。例として、サラウンドビューのより多くの画像ピクセルが画像平面に投影され、車両の周りのグラウンドフロアのより大きな部分が見えることを意味するより大きなボウル底部を作ることが可能である。
【0029】
サラウンドビューはまた、運転の間に、例えば、高速道路上に適用され得る。ドライバーは、頭を回転することが必要なしに、側面ミラーを見る必要なしに、車線記号および近隣の物体を観測し得る。従って、サラウンドビューは、追い越す間に、または高速道路に出入りする場合に車線を変更するために、所定の車線を保つように使用され得る。これらの全部の応用において、隣接する物体の優れた概観は、物体を見落とすことを避けるのに有用である。
【0030】
さらに、車両のサラウンドビューシステムを他のセンサーと組み合わせることが可能である。実行されるさらなる画像処理がない場合に、表示された物体の実際距離が知られない。従って、ボウル上に実際に配置されたポイントのみが正しく投影される。他の物体までの距離が既知であった場合に、修正は、表示された物体をボウル上にマップ化するために使用されたマッピング機能で行われ得、視覚的知覚が向上され得る。物体までの距離を測定するセンサーとして、レーダーセンサー、PMDセンサーまたは超音波センサーが使用され得る。
【0031】
車両が移動している場合、かつ同時にサラウンドビューが表示されている場合に、光学フローが生成される。光学フローは、物体までの距離を推定するために使用され得る。従って、本実施形態において、追加のセンサーの必要なしに、画像処理ユニットによって生成されたサラウンドビューのみを用いて、物体の距離または物体の位置を決定することが可能である。移動している車両の場合における距離のこの決定はさらに、表示されたサラウンドビューを向上させ得る。
【符号の説明】
【0032】
10 車両
11 魚眼カメラ
100 ボウル
【特許請求の範囲】
【請求項1】
車両のサラウンドビューシステムであって、該車両のサラウンドビューシステムは、
該車両(10)の異なる箇所において提供された複数の画像センサー(11)であって、該画像センサー(11)は、該車両の完全な周囲を覆う該車両周囲の画像データを生成する、該複数の画像センサーと、
該複数の画像センサー(11)の該画像データを処理する画像処理ユニット(20)であって、該画像処理ユニット(20)は、該異なる画像センサー(11)の該画像データに基づいて該車両の該サラウンドビューを生成するように構成され、該サラウンドビューを生成するために、該画像処理ユニット(20)は、該車両を囲むボウル(100)上に該画像データを逆に投影し、該ボウルは、実質的に長方形の形状を有する平らな底部を有し、該ボウルは、水平スライスで該底部上に続き、該ボウルの上部スライスは、形状において実質的に楕円である、画像処理ユニットと、
該画像処理ユニットによって生成された該サラウンドビューを表示するディスプレイと、
該生成されたサラウンドビューが表示されるビューの位置および角度を変更するマニピュレーター(40)と
を含む、車両のサラウンドビューシステム。
【請求項2】
前記長方形の形状の長辺対短辺の比率は、前記車両の長さ対該車両の幅の比率に比例している、請求項1に記載の車両のサラウンドビューシステム。
【請求項3】
前記実質的に楕円形状の長軸対短軸の比率は、前記車両の長さ対該車両の幅の比率に比例している、請求項1または2に記載の車両のサラウンドビューシステム。
【請求項4】
前記ボウル(100)の前記形状は、該ボウルの前記上部から前記底部へ徐々に、前記スライスの楕円形状から湾曲した角を有する該スライスの長方形の形状へ変化する、請求項1〜3のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項5】
前記ボウル(100)の前記形状は、前記上部から前記底部へ、前記スライスの楕円形状から該スライスの長方形の形状へ変化し、該長方形の形状の角が、該楕円形状によって取り替えられている、請求項4に記載の車両のサラウンドビューシステム。
【請求項6】
楕円形状を有する前記スライスの断面は、前記ボウル(100)の前記底部から前記上部へ線形に増大する、請求項1〜5のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項7】
前記底部の例外と共に、前記ボウルの前記垂直断面は、形状において楕円である、請求項1〜6のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項8】
前記ボウル(100)の前記垂直断面は、前記楕円形の垂直断面に続く、該ボウルの前記底部上の線を含み、該線と該楕円形の垂直断面との接続における勾配は、80°と100°との間であり、好ましくは、約90°である、請求項7に記載の車両のサラウンドビューシステム。
【請求項9】
前記ボウルが該ボウルの前記底部に接するスライスにおいて、楕円の形状を有する前記断面対該スライスの全長の比率は、0.6と0.8との間であり、好ましくは0.65と0.75との間であり、より好ましくは0.7である、請求項1〜8のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項10】
前記画像処理ユニット(20)は、前記ボウルの前記底部の大きさを変更するように構成される、請求項1〜9のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項11】
前記車両のサラウンドビューシステムは、インターフェース(22)をさらに含み、前記車両周囲に配置された物体の距離情報が、該インターフェースを介して受信され、前記画像処理ユニット(20)は、該車両の前記サラウンドビューにおいて示されている物体の位置を校正するために、受信された距離情報を使用する、請求項1〜10のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項12】
前記画像処理ユニット(20)は、前記車両が移動している場合に、該車両の前記サラウンドビューにおける物体の動きに基づいて、該車両に関連する該車両の該サラウンドビューにおいて示される該物体の距離を決定するように構成される、請求項1〜11のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項13】
前記画像センサー(11)は、170°より大きな水平開口角度を有する魚眼カメラである、請求項1〜12のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項14】
車両の異なる箇所において提供された複数の画像センサーを用いて該車両のサラウンドビューを生成するための方法であって、該画像センサーは、該車両の完全な周囲を覆う該車両周囲の画像データを生成し、該方法は、
該異なる画像センサーの該画像データに基づいて、該車両の該サラウンドビューを生成するために、該複数の画像センサーの該画像データを処理するステップであって、該画像データは、該車両を囲むボウル上に逆に投影され、該ボウルは、実質的に長方形の形状を有する平らな底部を有し、該ボウルは、水平スライスを用いて該底部上に続き、該ボウルの上部スライスは、形状において実質的に楕円である、ステップと
該画像処理ユニットによって生成された該サラウンドビューを表示するステップと、
該生成されたサラウンドビューがユーザー入力に従って表示されているビューの位置および角度を変更するステップと
を含む、方法。
【請求項1】
車両のサラウンドビューシステムであって、該車両のサラウンドビューシステムは、
該車両(10)の異なる箇所において提供された複数の画像センサー(11)であって、該画像センサー(11)は、該車両の完全な周囲を覆う該車両周囲の画像データを生成する、該複数の画像センサーと、
該複数の画像センサー(11)の該画像データを処理する画像処理ユニット(20)であって、該画像処理ユニット(20)は、該異なる画像センサー(11)の該画像データに基づいて該車両の該サラウンドビューを生成するように構成され、該サラウンドビューを生成するために、該画像処理ユニット(20)は、該車両を囲むボウル(100)上に該画像データを逆に投影し、該ボウルは、実質的に長方形の形状を有する平らな底部を有し、該ボウルは、水平スライスで該底部上に続き、該ボウルの上部スライスは、形状において実質的に楕円である、画像処理ユニットと、
該画像処理ユニットによって生成された該サラウンドビューを表示するディスプレイと、
該生成されたサラウンドビューが表示されるビューの位置および角度を変更するマニピュレーター(40)と
を含む、車両のサラウンドビューシステム。
【請求項2】
前記長方形の形状の長辺対短辺の比率は、前記車両の長さ対該車両の幅の比率に比例している、請求項1に記載の車両のサラウンドビューシステム。
【請求項3】
前記実質的に楕円形状の長軸対短軸の比率は、前記車両の長さ対該車両の幅の比率に比例している、請求項1または2に記載の車両のサラウンドビューシステム。
【請求項4】
前記ボウル(100)の前記形状は、該ボウルの前記上部から前記底部へ徐々に、前記スライスの楕円形状から湾曲した角を有する該スライスの長方形の形状へ変化する、請求項1〜3のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項5】
前記ボウル(100)の前記形状は、前記上部から前記底部へ、前記スライスの楕円形状から該スライスの長方形の形状へ変化し、該長方形の形状の角が、該楕円形状によって取り替えられている、請求項4に記載の車両のサラウンドビューシステム。
【請求項6】
楕円形状を有する前記スライスの断面は、前記ボウル(100)の前記底部から前記上部へ線形に増大する、請求項1〜5のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項7】
前記底部の例外と共に、前記ボウルの前記垂直断面は、形状において楕円である、請求項1〜6のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項8】
前記ボウル(100)の前記垂直断面は、前記楕円形の垂直断面に続く、該ボウルの前記底部上の線を含み、該線と該楕円形の垂直断面との接続における勾配は、80°と100°との間であり、好ましくは、約90°である、請求項7に記載の車両のサラウンドビューシステム。
【請求項9】
前記ボウルが該ボウルの前記底部に接するスライスにおいて、楕円の形状を有する前記断面対該スライスの全長の比率は、0.6と0.8との間であり、好ましくは0.65と0.75との間であり、より好ましくは0.7である、請求項1〜8のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項10】
前記画像処理ユニット(20)は、前記ボウルの前記底部の大きさを変更するように構成される、請求項1〜9のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項11】
前記車両のサラウンドビューシステムは、インターフェース(22)をさらに含み、前記車両周囲に配置された物体の距離情報が、該インターフェースを介して受信され、前記画像処理ユニット(20)は、該車両の前記サラウンドビューにおいて示されている物体の位置を校正するために、受信された距離情報を使用する、請求項1〜10のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項12】
前記画像処理ユニット(20)は、前記車両が移動している場合に、該車両の前記サラウンドビューにおける物体の動きに基づいて、該車両に関連する該車両の該サラウンドビューにおいて示される該物体の距離を決定するように構成される、請求項1〜11のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項13】
前記画像センサー(11)は、170°より大きな水平開口角度を有する魚眼カメラである、請求項1〜12のいずれか一項に記載の車両のサラウンドビューシステム。
【請求項14】
車両の異なる箇所において提供された複数の画像センサーを用いて該車両のサラウンドビューを生成するための方法であって、該画像センサーは、該車両の完全な周囲を覆う該車両周囲の画像データを生成し、該方法は、
該異なる画像センサーの該画像データに基づいて、該車両の該サラウンドビューを生成するために、該複数の画像センサーの該画像データを処理するステップであって、該画像データは、該車両を囲むボウル上に逆に投影され、該ボウルは、実質的に長方形の形状を有する平らな底部を有し、該ボウルは、水平スライスを用いて該底部上に続き、該ボウルの上部スライスは、形状において実質的に楕円である、ステップと
該画像処理ユニットによって生成された該サラウンドビューを表示するステップと、
該生成されたサラウンドビューがユーザー入力に従って表示されているビューの位置および角度を変更するステップと
を含む、方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−227913(P2012−227913A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2012−41616(P2012−41616)
【出願日】平成24年2月28日(2012.2.28)
【出願人】(504147933)ハーマン ベッカー オートモーティブ システムズ ゲーエムベーハー (165)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成24年2月28日(2012.2.28)
【出願人】(504147933)ハーマン ベッカー オートモーティブ システムズ ゲーエムベーハー (165)
【Fターム(参考)】
[ Back to top ]