
車両のスタック脱出装置
【課題】脱出動作から反転動作への切換を適切なタイミングで実行でき、もってスタック状態から迅速且つ確実に脱出できる車両のスタック脱出装置を提供する。
【解決手段】後輪が路面の窪みにスタックしたときに、クラッチを接続して後輪を脱出方向に回転駆動する脱出動作(S8)と、クラッチを遮断して車両の自重により後輪を窪み内で反脱出方向に転動させる反転動作(S16)とを交互に繰り返しながら後輪を脱出させるスタック脱出装置において、脱出動作の実行中において、従動輪の車輪速が停車判定値未満で、且つ後輪と前輪との車輪速差がスリップ判定値以上になったときに脱出動作の終了判定を下し(S10がYes)、脱出動作から反転動作に切り換える。
【解決手段】後輪が路面の窪みにスタックしたときに、クラッチを接続して後輪を脱出方向に回転駆動する脱出動作(S8)と、クラッチを遮断して車両の自重により後輪を窪み内で反脱出方向に転動させる反転動作(S16)とを交互に繰り返しながら後輪を脱出させるスタック脱出装置において、脱出動作の実行中において、従動輪の車輪速が停車判定値未満で、且つ後輪と前輪との車輪速差がスリップ判定値以上になったときに脱出動作の終了判定を下し(S10がYes)、脱出動作から反転動作に切り換える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は車両のスタック脱出装置に係り、詳しくは泥濘地等において駆動輪が空転して路面に生じた窪みにスタックしたときに、クラッチの断接に応じて駆動輪を断続的に駆動しながら、窪み内で駆動輪を前後方向に揺り動かして脱出させるスタック脱出装置に関するものである。
【背景技術】
【0002】
泥濘地等のように摩擦係数が低く且つ柔らかい路面の走行時には、駆動輪のスリップにより路面に生じた窪みに駆動輪が嵌り込んだスタック状態に陥ってしまう場合がある。スタック状態からの脱出には、例えばクラッチ操作を伴って手動で変速操作する手動式変速機を備えた車両では、ギヤを1速や2速に入れた上でクラッチを断接操作し、窪み内で駆動輪を前後方向に転動させながら往復ストロークを次第に増加させて脱出する方法が採られる。
【0003】
ところが、クラッチ操作を自動化した車両、例えば上記手動変速機を備えた車両と基本構成を共通としながら、クラッチの断接操作及び変速機の変速操作をアクチュエータで行う車両では、運転者が任意にクラッチ操作できないため、必然的に上記したスタック脱出方法を実施することはできない。そこで、このような不具合に対処すべく、スタック状態からの脱出を自動的に実行するスタック脱出装置が提案されている(例えば、特許文献1参照)。
【0004】
上記特許文献1の技術では、エンジンに対してトルクコンバータ及びプラネタリギヤユニットからなる動力伝達装置を接続し、この動力伝達装置を介してエンジンからの駆動力を駆動輪に伝達するように構成されている。本スタック脱出装置では、基本的に駆動輪に設けた車速センサの出力に基づきプラネタリギヤユニットのフロントクラッチを断接操作してスタック脱出が図られる。
【0005】
フロントクラッチは、車速センサにより検出された車速が値0以上のときを条件としてON(接続)され、車速が値0未満のときを条件としてOFF(遮断)される。車速が値0以上とは、窪み内で駆動輪が前進方向に転動していることを意味するため、クラッチONで駆動輪を駆動することにより窪み内で駆動輪を前進方向に登らせ(脱出動作)、一方、車速が値0未満とは、窪み内で駆動輪が後退方向に転動していることを意味するため、クラッチOFFで駆動輪の回転駆動を中止することにより、車両の自重により駆動輪を窪み内で後退方向に登らせ(反転動作)、これらの脱出動作と反転動作とを交互に繰り返すことで、窪み内で駆動輪を前後方向に転動させ車両を揺り動かしながら窪み内から脱出させている。
【特許文献1】特開平9−175225号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1の技術では、脱出動作から反転動作への切換を適切なタイミングで実行できず、かえってスタック状態を悪化させてしまうという問題を引き起こすことが考えられる。
このような問題を生じる要因は、特許文献1の技術が窪み内での駆動輪の挙動を把握しきれていないことに起因する。即ち、このスタック脱出方法の趣旨は、断続的な駆動により駆動輪を窪み内で前後方向への転動を繰り返しながら往復ストロークを次第に増加させることにあり、往復ストロークが窪みの領域を上回った時点で駆動輪が窪みから脱出する。脱出に至るまでの駆動輪は、窪み内での後退方向への転動時には、車両の自重による慣性力を消費した時点で前進方向に転じるだけのため、このときの車速は値0となり、窪みを登った頂点で脱出動作に切り換えることができる。
【0007】
ところが、駆動輪の前進方向への転動時には、伝達される駆動力が路面との摩擦係数を上回った時点で駆動輪がスリップを生じるため、窪み内を登った頂点でも車速センサにより検出された車速は値0以上の値を継続し、反転動作への切換が行われなくなる。結果として駆動輪のスリップが継続されて窪みがさらに拡大し、スタック状態がかえって悪化させて脱出不能に陥るという問題があった。
【0008】
本発明はこのような問題点を解決するためになされたもので、その目的とするところは、脱出動作から反転動作への切換を適切なタイミングで実行でき、もってスタック状態から迅速且つ確実に脱出することができる車両のスタック脱出装置を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するため、請求項1の発明は、エンジンの駆動力をクラッチの断接動作に応じて変速機を介して駆動輪に伝達する車両に搭載され、駆動輪が路面の窪みにスタックしたときに、クラッチを接続してエンジンの駆動力で駆動輪を脱出方向に回転駆動する脱出動作と、クラッチを遮断して車両の自重により駆動輪を窪み内で反脱出方向に転動させる反転動作とを交互に繰り返しながら、窪み内での駆動輪の往復ストロークを次第に増加させて窪み内から駆動輪を脱出させるスタック脱出制御手段を備えた車両のスタック脱出装置において、スタック脱出制御手段による脱出動作の実行中において、従動輪の車輪速が予め設定された停車判定値未満で、且つ駆動輪と従動輪との車輪速差が予め設定されたスリップ判定値以上になったときに、脱出動作の終了判定を下す終了判定手段を備え、スタック脱出制御手段が、終了判定手段により終了判定が下されたときに脱出動作から反転動作に切り換えるものである。
【0010】
従って、車両の駆動輪が路面の窪みにスタックしたときには、スタック脱出制御手段により脱出動作と反転動作とが交互に繰り返されることにより、窪み内で駆動輪は前後方向への転動を繰り返しながら往復ストロークを次第に増加して窪み内から脱出する。脱出動作では、駆動輪が脱出方向に転動しながら窪み内を登り、駆動力が路面との摩擦係数を上回った時点で駆動輪はスリップし始めて停止し、脱出方向に移動していた車両もほぼ停止する。これにより従動輪の車輪速が停車判定値未満となると共に、駆動輪と従動輪との車輪速差がスリップ判定値以上になり、終了判定手段により脱出動作の終了判定が下されて、スタック脱出制御手段により脱出動作から反転動作への切換が実行される。
【0011】
脱出動作においては、駆動輪はスリップしない限り脱出方向に転動しながら窪み内を登る一方、駆動輪がスリップし始めると窪みが拡大してスタックが悪化する可能性が高まるため、基本的に脱出動作の終了判定は、駆動輪のスリップ状況を指標とすることが望ましい。但し、路面状況によっては窪み内で駆動輪がスリップしながらも登り続けることもあり、この場合には駆動輪が窪みを登り続けて車両が脱出方向に移動する限り、駆動輪の駆動を継続することが望ましい。従って、従動輪の車輪速が停車判定値未満で、且つ駆動輪と従動輪との車輪速差がスリップ判定値以上になったことを条件として、脱出動作を終了することにより、無用なスリップの継続により窪みを拡大してスタックを悪化させることなく、窪み内の可能な限り高い位置まで駆動輪を登らせて往復ストロークの増加に貢献でき、もってスタック状態から迅速且つ確実に脱出可能となる。
【0012】
請求項2の発明は、請求項1において、スタック脱出制御手段による脱出動作の実行中において、脱出動作を開始してからの従動輪の転動距離が予め設定された脱出完了判定値以上になったときに脱出完了判定を下す脱出完了判定手段を備え、スタック脱出制御手段が、脱出完了判定手段により脱出完了判定が下されたときに制御を中止するものである。
従って、例えば脱出完了判定値として、一般的な窪み内での駆動輪の転動に伴って従動輪が転動する距離よりも十分に大きな値に設定されることにより、脱出動作を開始してからの従動輪の転動距離が脱出完了判定値以上になったときには、駆動輪の窪みからの脱出が完了したものと見なせる。よって、脱出完了判定手段の脱出完了判定に基づいてスタック脱出制御手段の制御が中止され、脱出動作の終了に伴ってクラッチが遮断されて駆動輪の駆動力が消失することから、車両は惰性により緩やかに脱出方向に移動するだけとなり、脱出後に円滑に運転者の操作による通常の走行に移行可能となる。
【0013】
請求項3の発明は、請求項1において、スタック脱出制御手段による脱出動作の実行中において、エンジンの回転速度と相関するエンジン回転速度相関値が予め設定されたエンスト予測判定値未満になったときにエンスト予測を下すエンスト予測手段を備え、スタック脱出制御手段が、エンスト予測手段によりエンスト予測が下されたときに、終了判定手段が終了判定を下していなくても脱出動作から反転動作に切り換えるものである。
【0014】
従って、窪みからの脱出時の駆動輪は路面との摩擦係数を瞬間的に急増する現象を発生させ、そのまま脱出完了すれば問題ないが、僅かのところで窪みからの脱出に成功しなかった場合には、摩擦係数の急増による負荷がエンジンに及んでエンスト(エンジン停止)により駆動輪は窪み内で再び停止し、最初からスタック脱出制御をやり直す必要が生じる。本発明では、摩擦係数の増加によりエンジン回転速度相関値(例えばエンジン回転速度或いは駆動輪の車輪速等)がエンスト予測判定値未満になると、エンスト予測手段のエンスト予測を受けてスタック脱出制御手段により脱出動作から反転動作への切換が実行されるため、エンストを未然に防止してスタック脱出制御を継続可能となる。
【0015】
請求項4の発明は、請求項1において、スタック脱出制御手段による脱出動作の試行回数をカウントするカウント手段を備え、スタック脱出制御手段が、カウント手段のカウント値が予め設定された連続試行制限値に達したときに制御を中止するものである。
従って、脱出動作の実行毎にクラッチは接続操作されて温度上昇により消耗するが、カウント手段によりカウントされる脱出動作の試行回数が連続試行制限値に達した時点でスタック脱出制御手段の制御が中止されるため、連続的な接続操作による急激なクラッチの消耗が抑制される。
【0016】
請求項5の発明は、請求項1において、窪み内からの上記駆動輪の脱出方向を判定する脱出方向判定手段と、車両のブレーキを作動させるブレーキ駆動手段とを備え、スタック脱出制御手段が、脱出方向判定手段により駆動輪が車両の後退方向に脱出したと判定されたときに、ブレーキ駆動手段によりブレーキを作動させるものである。
従って、駆動輪が窪み内から車両の後退方向に脱出して、そのまま脱出方向に車両を移動させ続けると従動輪を窪みにスタックさせてしまうが、このときにはブレーキ駆動手段によりブレーキが作動するため、従動輪のスタックが未然に防止される。
【発明の効果】
【0017】
以上説明したように請求項1の発明の車両のスタック脱出装置によれば、脱出動作から反転動作への切換を適切なタイミングで実行でき、もってスタック状態から迅速且つ確実に脱出することができる。
請求項2の発明の車両のスタック脱出装置によれば、請求項1に加えて、スタックからの脱出完了を的確に判定でき、脱出後に円滑に運転者の操作による通常の走行に移行することができる。
【0018】
請求項3の発明の車両のスタック脱出装置によれば、請求項1に加えて、脱出動作の実行中のエンストを未然に防止してスタック脱出制御を継続でき、もってスタック脱出制御をやり直したときのスタック状態の悪化による脱出不能を回避して、迅速にスタックから脱出することができる。
請求項4の発明の車両のスタック脱出装置によれば、請求項1に加えて、連続的な接続操作による急激なクラッチの消耗を抑制し、クラッチ故障による走行不能の事態を未然に回避することができる。
【0019】
請求項5の発明の車両のスタック脱出装置によれば、請求項1に加えて、窪みから駆動輪を脱出させた直後の従動輪のスタックを未然に防止でき、もってスタックからの脱出性能をさらに向上させることができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明を機械式自動変速機を備えたトラックのスタック脱出装置に具体化した一実施形態を説明する。
図1は本発明のスタック脱出装置が搭載されたトラックを示す全体構成図である。
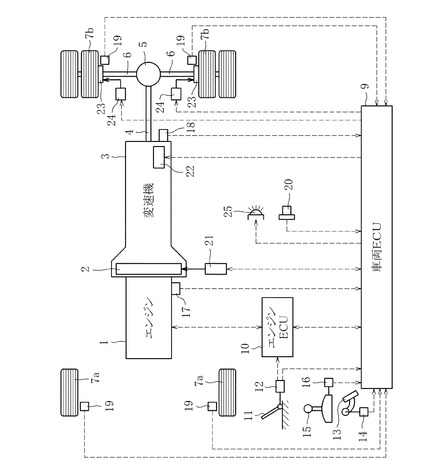
車両の図示しないキャブの下側にはディーゼルエンジン1が搭載され、エンジン1にはクラッチ2を介して変速機3が連結されている。クラッチ2は、一般的な手動式の乾式クラッチと同様の構成であるが、後述するようにアクチュエータの駆動により断接操作される自動クラッチとして機能する。同じく変速機3は、複数の変速段をシンクロ機構で回転同期させて切り換える手動式変速機と同様の構成であるが、後述するようにアクチュエータの駆動により自動的に変速操作される機械式自動変速機として機能する。変速機3にはプロペラシャフト4を介してディファレンシャル機構5が連結され、ディファレンシャル機構5は左右のドライブシャフト6を介して後輪7b(駆動輪)と連結されている。
【0021】
従って、エンジン1の駆動力はクラッチ2の断接状態に応じて変速機3に入力され、変速機3の変速段に応じて変速された後、プロペラシャフト4、ディファレンシャル機構5、ドライブシャフト6を介して左右の後輪7bに伝達され、後輪7bに発生した駆動力により車両が走行する。
車室内には、図示しない入出力装置、制御プログラムや制御マップ等の記憶に供される記憶装置(ROM、RAM、BURAM等)、中央処理装置(CPU)、タイマカウンタ等を備えた車両ECU9(電子制御ユニット)及びエンジンECU10が設置されている。車両ECU9は、例えばクラッチ2の断接操作を含めた変速機3の自動変速制御や後述する泥濘地でのスタック脱出制御等のような車両全体の統合的な制御を実行すると共に、これらの制御での最適なエンジン出力を実現すべくエンジンECU10側に指令を出力する。エンジンECU10は主に燃料噴射制御等のエンジン制御を実行し、例えば運転者のアクセル操作に応じたエンジン出力の調整、或いは上記のように車両ECU9側からの指令に基づくエンジン出力の調整、さらにエンジン1の排気系に設けられた図示しない排気浄化装置を最適条件で機能させるための各種排気浄化制御等を行う。
【0022】
これらの制御を実行するために、車両ECU9はエンジンECU10と電気的に接続されると共に、車両ECU9の入力側には、アクセルペダル11の操作量θaccを検出するアクセルセンサ12、ブレーキペダル13の踏み込み操作を検出するブレーキスイッチ14、ニュートラル(N)、ドライブ(D)、リバース(R)等のセレクトレバー15の操作位置を検出するセレクトレバー位置センサ16、エンジン回転速度Neを検出するエンジン回転速度センサ17、変速機3の出力軸回転速度Noutを検出する出力軸回転速度センサ18、左右の前輪7a(従動輪)及び後輪7bの車輪速Nf,Nrを検出する車輪速センサ19、スタック脱出制御の開始を指示するためのスタートスイッチ20等の各種センサ・スイッチ類が接続されている。
【0023】
また、車両ECU9の出力側には、クラッチ2を断接操作するためのクラッチアクチュエータ21、変速機3の変速段を切り換えるための変速アクチュエータ22、左右の後輪7bのブレーキ23を作動させるためのブレーキアクチュエータ24(ブレーキ駆動手段)、スタック脱出制御の実行を表示するための表示ランプ25等のデバイス類が接続されている。
【0024】
なお、本実施形態では、これらのアクチュエータ21,22,24を共通の油圧発生源から供給される油圧を利用して作動させているが、アクチュエータ21,22,24の作動原理はこれに限定されるものではなく、エアや電動モータを利用したものに代えてもよい。また、ブレーキアクチュエータ24は後輪7bに代えて前輪7a、或いは前後輪7a,7bに設けてもよい。
【0025】
また、エンジンECU10の入力側には、上記アクセルセンサ12等の各種センサ類が接続され、エンジンECU10の出力側には、エンジン1の図示しない燃料噴射弁等のデバイス類が接続されている。
例えば車両ECU9は、セレクトレバー位置センサ16により検出されたセレクトレバー15の操作位置に応じて、変速アクチュエータ22により変速機3をニュートラル、ドライブ、リバースに切り換えると共に、アクセルセンサ12により検出されるアクセル操作量θaccの増加に応じて、クラッチアクチュエータ21によりクラッチ2を接続しながらエンジンECU10にエンジン出力の増加指令を出力し、これにより車両を前方或いは後方に発進させる。また、ドライブ位置での走行中には、車両ECU9は、アクセルセンサ12からのアクセル操作量θacc、及び出力軸回転速度センサ18の検出値から求めた車速V(ディファレンシャル機構5のギヤ比及び後輪7bの直径より換算)から設定した目標変速段に基づき、クラッチ2を断接操作しながら実際の変速段を切り換えると共に、変速中にはエンジンECU10に一時的なエンジン出力の低下指令を出力する。
【0026】
また、車両ECU9は泥濘地等で車両がスタック(路面に生じた窪みに後輪7bが嵌り込んだ状態を指す)したときに、スタックから脱出すべく図2,3に示すルーチンに従ってスタック脱出制御を実行している。そこで、これら図2,3、及び前方へのスタック脱出過程を表した図4〜9の説明図に基づき、当該スタック脱出制御について詳述する。
車両ECU9は予め設定されたスタック脱出制御開始条件が成立したときに、図2,3に示すスタック脱出制御ルーチンを所定の制御インターバルで実行する。スタック脱出制御開始条件としては、以下の要件1)〜7)が設定されており、車両ECU9は、全ての要件が満たされたときにスタック脱出制御開始条件が成立したとしてスタック脱出制御ルーチンを開始する。
1)スタートスイッチ20がONされていること。
2)セレクトレバー15がD位置またはR位置であること。
3)エンジン1がアイドル運転中であること(アクセル操作無し)。
4)ブレーキスイッチ14がONされていること(ブレーキ操作中)。
5)スタートスイッチ20のONに呼応して表示ランプ25が点灯していること。
6)前輪7aの車輪速Vf(左右の平均値を適用し、以下の車輪速Vfも同様)≦2km/hであること。
7)要件6)の成立時間≧2secであること。
【0027】
要件1)〜4)は、車両のスタックを認識した運転者がスタック脱出制御の実行を要求する意志表示の確認であり、要件5)は、運転者の意志表示に対してスタック脱出制御を実行する旨が正常に表示されていることの確認であり、要件6),7)は、車両が停車してスタック脱出制御を開始可能な状況であることの確認である。要件6では、従動輪である前輪7aの車輪速Vfを車速Vと見なしているが、これに限らず、例えば上記のように出力軸回転速度Noutから車速Vを算出してもよい。なお、車速V=2km/hは車輪速センサ19の限界感度であり、2km/h以下を停車と見なしている。
【0028】
ここで、要件2)はスタック脱出制御の要求のみならず、希望するスタックからの脱出方向も含み、運転者は前方への脱出を希望するときにはセレクトレバー15をD位置とし、後方への脱出を希望するときにはR位置としている。
以上のスタック脱出制御開始条件が成立したときに、車両ECU9は図2,3のスタック脱出制御ルーチンを開始する。
【0029】
基本的にスタック脱出制御は、クラッチ2を断接操作して後輪7bを断続的に駆動することにより、窪み内で後輪7bを前後方向への転動を繰り返しながら往復ストロークを次第に増加させて、車両を前後方向に揺り動かしながら窪み内から脱出させる原理を利用している(スタック脱出制御手段)。以下の説明では、後輪7bを脱出方向(セレクトレバー15のD位置またはR位置により定まる)に駆動して窪み内を登らせる動作を脱出動作と称し、駆動を中止して脱出動作により自車の自重で後輪7bを反脱出方向に転動させて窪み内を登らせる動作を反転動作と称する。
【0030】
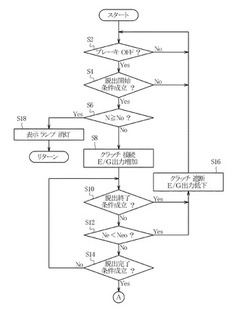
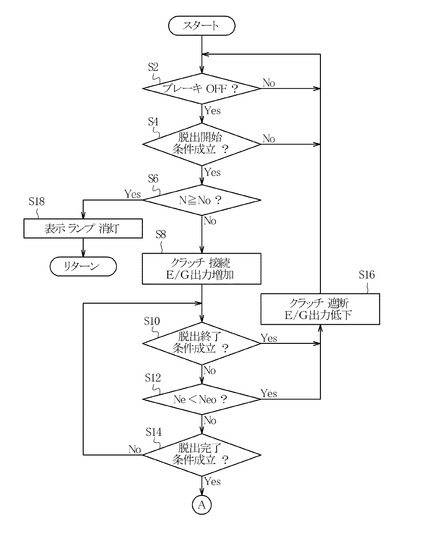
車両ECU9は、まず、ステップS2でブレーキスイッチ14がOFFになったか否かを判定する。運転者が意図的にブレーキ操作を解除したときにはスタック脱出制御の開始タイミングと見なし、ステップS2でYes(肯定)の判定を下してステップS4に移行する。ステップS4では脱出動作の開始条件が成立したか否かを判定する。脱出動作の開始条件としては、以下の要件8),9)が設定されている。
8)前輪7aの車輪速Vf≦2km/hであること。
9)クラッチ遮断からの経過時間≧0.5secであること。
【0031】
車両ECU9は要件8),9)が共に満たされているときに脱出動作の開始条件が成立したと見なす。後述する脱出動作が終了する時点でも車両停止により要件8)が満たされるため、このような状況を除外して脱出動作の開始のみを判定するために、要件9)が追加されているのである。
車両ECU9はステップS4の判定がNo(否定)の間はステップS2,4を繰り返し、判定がYesになるとステップS6に移行する。ステップS6では脱出動作の実行毎にカウントアップされる試行回数Nが予め設定された連続試行制限値N0に達したか否かを判定し(カウント手段)、判定がNoのときにはステップS8に移行する。なお、ステップS6の処理の趣旨については後述する。
【0032】
ステップS8では、脱出動作としてクラッチ接続及びエンジン出力増加の処理を実行する。即ち、車両ECU9はクラッチアクチュエータ21によりクラッチ2を駆動して接続操作すると共に、エンジンECU10にエンジン出力を所定値まで増加させるべく指令を出力する。所定値としては、摩擦係数の低い泥濘地であることを考慮して通常路面での発進時に要求されるエンジン出力よりも多少低く、且つその際にエンストしない程度の値が設定される。
【0033】
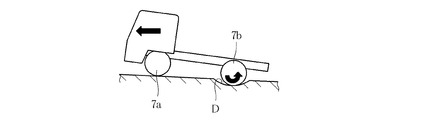
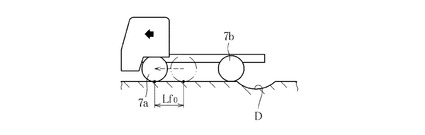
クラッチ接続に伴って後輪7bにはセレクトレバー15の位置に応じた方向にエンジン1の駆動力が伝達され、その結果、セレクトレバー15がD位置のときには、図4に示すように後輪7bは窪みD内で前方へ転動し始め、Rレンジのときには、図示はしないが後輪7bは窪みD内で後方に転動し始める。
続くステップS10では脱出動作の終了条件(換言すれば、反転動作の開始条件)が成立したか否かを判定する(終了判定手段)。脱出動作の終了条件としては、以下の要件10),11)が設定されている。
10)前輪7aの車輪速Vf≦2km/hであること。
11)前輪7aの車輪速Vfと後輪7bの車輪速Vr(左右の平均値)との差の絶対値|Vf−Vr|≧スリップ判定値Vslipであること。
【0034】
車両ECU9は要件10),11)が共に満たされているときに脱出動作の終了条件が成立したと見なす。
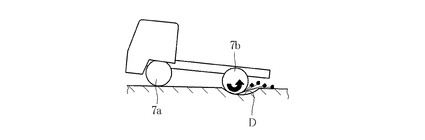
駆動力の伝達により後輪7bは転動しながら窪みD内を前方または後方に登るが、後輪7bに伝達される駆動力が路面との摩擦係数を上回った時点で、図5に示すように後輪7bはスリップし始める。スリップによる摩擦係数の低下により後輪7bの駆動力は急減するため、この位置を窪みD内を登った頂点として後輪7bは当該位置に停止したままスリップし続ける。結果として窪みD内での後輪7bの転動に応じて前進または後退していた車両もほぼ停止し、上記要件10)が満たされると共に、後輪7bのスリップにより要件11)も満たされる。なお、スリップ判定値Vslipとしては、例えば10km/hが設定されている。
【0035】
上記要件10),11)は、以下の知見の基に設定されたものである。
脱出動作においては、後輪7bはスリップしない限り脱出方向に転動しながら窪みD内を登る一方、後輪7bがスリップし始めると窪みDが拡大してスタックが悪化する可能性が高まるため、基本的に脱出動作の終了判定は、後輪7bのスリップ状況を指標とすることが望ましい。但し、路面状況によっては窪みD内で後輪7bがスリップしながらも登り続けることもあり、この場合には後輪7bが窪みDを登り続ける限り、換言すれば車両が脱出方向に移動する限り、後輪7bの駆動を継続することが望ましい。
【0036】
従って、従動輪である前輪7aの車輪速Vf≦2km/hで、且つ前輪7aと後輪7bとの車輪速差|Vf−Vr|≧スリップ判定値Vslipであることを脱出動作の終了条件とすれば、常に最適なタイミングで脱出動作を終了できる。これにより、無用なスリップの継続により窪みDを拡大してスタック状態を悪化させることなく、窪みD内の可能な限り高い位置まで後輪7bを登らせて往復ストロークの増加に貢献でき、もってスタック状態から迅速且つ確実に脱出することができる。
【0037】
車両ECU9は、ステップS10の判定がNoのときにはステップS12に移行し、エンジン回転速度Neがエンスト予測判定値Ne0未満であるか否かを判定する(エンスト判定手段)。エンスト予測判定値Ne0はエンストを回避可能な下限近傍の回転速度、例えば500rpmが設定されている。なお、クラッチ2を接続した脱出動作の実行中では、エンジン回転速度Neと後輪7bの車輪速Vrとが相関しているため、エンジン回転速度Neに代えて車輪速Vr(エンジン回転速度相関値)に基づいて判定を実行してもよい。
【0038】
ステップS12の判定がNoのときにはステップS14に移行し、脱出完了条件が成立したか否かを判定する(脱出完了判定手段)。脱出完了条件としては、以下の要件12)が設定されている。
12)今回の脱出動作を開始してからの前輪7aの転動距離Lf≧脱出完了判定値Lf0であること。
【0039】
脱出完了判定値Lf0は、一般的な窪みD内での後輪7bの転動に伴って前輪7aが転動する距離よりも十分に大きな値であり、且つ車両のホイールベースに比較して十分に小さな値、例えば1mが設定されている。ステップS14の判定がNoのときには、後輪7bが窪みD内から脱出していないと見なして上記ステップS10に戻り、脱出動作を継続しながらステップS10〜14の処理を実行する。
【0040】
多くのケースでは最初の脱出動作のみでスタック脱出に成功することはなく、脱出動作と反転動作とを繰り返してスタック脱出を図ることになる。従って、通常はステップS10でYesの判定を下してステップS16に移行する。ステップS16では、反転動作としてクラッチ遮断及びエンジン出力低下の処理を実行する。即ち、車両ECU9はクラッチアクチュエータ21によりクラッチ2を遮断操作すると共に、エンジンECU10にエンジン出力をアイドル相当値まで低下させるべく指令を出力する。
【0041】
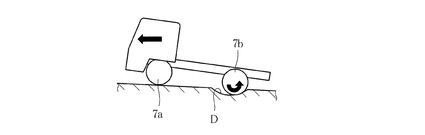
クラッチ遮断に伴って後輪7bは駆動力を消失し、図6に示すように車両の自重により窪みD内で反脱出方向に転動し、窪みD内を反脱出方向に登り始める。
その後、車両ECU9はステップS2,4の処理を繰り返し、ステップS4の判定がYes(脱出動作の開始条件が成立)になると、ステップS6を経てステップS8で脱出動作を開始する。従って、図7に示すように、窪みD内を反脱出方向に進行し、ステップS2〜6の条件を満たしたときに後輪7bは再び脱出方向に駆動され、窪みD内を脱出方向に転動し始める。以上のように、ステップS8の脱出動作及びステップS16の反転動作の繰り返しにより、後輪7bは窪みD内で前後方向への転動を繰り返しながら往復ストロークを次第に増加させる。
【0042】
ここで、脱出動作の実行毎にクラッチ2は接続操作されるため、急激に温度上昇することにより著しく消耗する。ステップS6の連続試行制限値N0としては、クラッチ2が連続的に接続操作されても支障ない程度の回数、例えば10回が設定されており、試行回数Nが連続試行制限値N0に達したときには、ステップS6でYesの判定を下してステップS18で表示ランプ25を消灯した後、一旦ルーチンを終了する。
【0043】
表示ランプ25の消灯或いはスタック脱出のための車両挙動の中止等から、運転者はスタック脱出制御の中断を認識し、クラッチ温度が低下するまで待機した後に、再び上記と同様の手順によりスタック脱出制御を再開する。従って、連続的な接続操作による急激なクラッチ2の消耗を抑制でき、もってクラッチ故障による走行不能の事態を未然に回避することができる。なお、ステップS18では、表示ランプ25の消灯に代えて、しばらく待機することを勧めるメッセージを運転者に対して表示してもよい。
【0044】
そして、脱出動作及び反転動作の繰り返しにより窪みD内での後輪7bの往復ストロークは増加するため、何れかの脱出動作の実行中において後輪7bは窪みDを登り切り、図8に示すように前方に脱出するか、或いは図9に示すように後方に脱出する。
このときの後輪7bは、上記スリップ時とは逆に路面との摩擦係数を瞬間的に急増する現象を発生させる。そのまま後輪7bが窪みD内からの脱出を完了すれば後は惰性で転動するだけのため問題ないが、僅かのところで窪みDからの脱出に成功しなかった場合には、摩擦係数の急増による負荷がエンジン1に及ぶことからエンストを生じて後輪7bは窪みD内で再び停止してしまう。従って、最初からスタック脱出制御をやり直す必要が生じ、脱出に時間を要するばかりでなく、スタック状態の悪化により脱出不能に陥る虞も生じる。
【0045】
このような場合、本実施形態ではステップS12の判定がYesになることを受けてステップS16でクラッチ2が遮断されるため、エンストを未然に防止できる。よって、引き続きステップS12〜16の処理より脱出動作及び反転動作を実行でき、スタック脱出制御のやり直したときのスタック状態の悪化により脱出不能を回避できると共に、迅速にスタック状態から脱出することができる。
【0046】
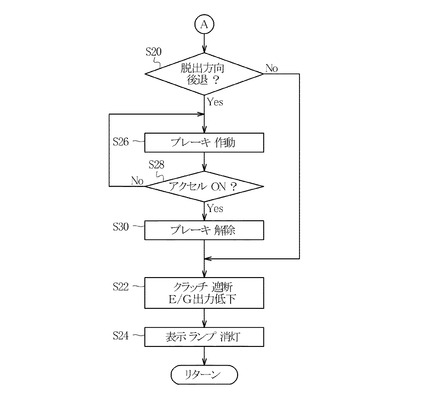
一方、上記ステップS14の判定がYesになると、車両ECU9は窪みDから後輪7bが脱出したと見なしてステップS20に移行し、脱出方向が後退方向であるか否かを判定する(脱出方向判定手段)。当該ステップS20の判定は、例えば、上記要件12)が成立したときの前輪7aの転動方向に基づき行われる。ステップS20の判定がNoのときにはステップS22に移行し、上記した反転動作と同じくクラッチ2を遮断操作すると共に、エンジンECU10にエンジン出力の低下指令を出力し、続くステップS24で表示ランプ25を消灯した後にルーチンを終了する。
【0047】
結果として車両は、スタック脱出制御を開始した当初の要件2)のD位置またはR位置、及び要件3)のアクセルOFFに基づく運転者の操作と整合する運転状態となり、後輪7bは窪みDから脱出した時点でクラッチ遮断により駆動力を消失し、車両は惰性により緩やかに前進または後退するだけとなる。表示ランプ25の消灯或いはスタック脱出したときの車両の挙動から、運転者はスタック脱出を認識して自己の運転操作により引き続いて車両を走行させる。
【0048】
このように脱出完了判定に基づくクラッチ遮断の処理により、車両が窪みDからの脱出した勢いで前方または後方に飛び出す事態が防止され、脱出後に円滑に運転者による通常の走行に移行できる。この要因は、スタック状態から脱出する際の運転操作を容易化することに貢献する。
また、ステップS20の判定がYesのときには、ステップS26でブレーキアクチュエータ24によりブレーキ23を作動させる。その後、車両ECU9はステップS28でアクセルセンサ12の出力に基づき運転者によりアクセル操作が行われたか否かを判定し、判定がNoの間はステップS26でブレーキ23の作動を継続する。運転者がスタック状態からの脱出を認識して車両を走行させるべくアクセル操作を開始すると、車両ECU9はステップS28でYesの判定を下し、続くステップS30でブレーキ23を解除した後に上記ステップS22に移行する。
【0049】
ステップS20の判定がYesのときには、図9に示すように後輪7bを車両の後退方向に脱出させて車両が惰性により後退中であると見なせ、そのまま後退を継続すると前輪7aを窪みDにスタックさせてしまう可能性がある。ステップS26の処理により、前輪7aの転動距離Lfが脱出完了判定値Lf0に達した時点でブレーキ23による制動で車両が停止するため、このような前輪7aのスタックを未然に防止でき、結果としてスタック状態からの脱出性能をさらに向上させることができる。
【0050】
以上で実施形態の説明を終えるが、本発明の態様はこの実施形態に限定されるものではない。例えば上記実施形態では、ディーゼルエンジンを走行用駆動源とした後輪駆動のトラックに適用したが、車両の種別や走行用駆動源の種別はこれに限ることはなく、例えばFF駆動の乗用車に適用したり、エンジンとモータとを走行用駆動源とするハイブリッド車両に適用したりしてもよい。
【0051】
また、上記実施形態では、クラッチ2の断接操作及び変速操作を自動化した機械式自動変速機3を搭載した車両を対象としたが、これに限ることはない。例えばクラッチ2の断接操作のみを自動化した機械式手動変速機を備えた車両に適用し、上記実施形態と同様にクラッチ2を断接操作して脱出動作と反転動作を交互に実行すると共に、脱出動作でのエンジン出力の調整は運転者に委ねてもよい。また、上記特許文献1に記載されたトルクコンバータ付きの自動変速機を備えた車両に適用し、上記実施形態と同様にフロントクラッチを断接操作してもよい。また、上記実施形態の構成において、脱出動作でのエンジン出力の調整を自動化せずに、運転者が出力調整するようにしてもよい。
【0052】
また、上記実施形態では、要件11)として、前輪7aと後輪7bとの車輪速差に基づいて後輪7bのスリップを判定したが、これに限ることはなく、例えば左右の後輪7bの車輪速差が所定値以上になることを要件11)として設定してもよいし、或いは左右の後輪7bの何れかの回転速度が所定変化率以上で急増することを要件11)として設定してもよい。
【図面の簡単な説明】
【0053】
【図1】本発明のスタック脱出装置が搭載されたトラックを示す全体構成図である。
【図2】車両ECUが実行するスタック脱出制御ルーチンを示すフローチャートである。
【図3】車両ECUが実行するスタック脱出制御ルーチンを示すフローチャートである。
【図4】窪み内での停止状態からクラッチ接続により車両前方への脱出動作を開始したときの説明図である。
【図5】脱出動作中に後輪がスリップし始めたときの説明図である。
【図6】脱出動作からクラッチ遮断により反転動作に切り換えられたときの説明図である。
【図7】反転動作からクラッチ接続により脱出動作に切り換えられたときの説明図である。
【図8】前方への脱出を完了したときの説明図である。
【図9】後方への脱出を完了したときの説明図である。
【符号の説明】
【0054】
1 エンジン
2 クラッチ
7a 前輪(従動輪)
7b 後輪(駆動輪)
9 車両ECU(スタック脱出制御手段、終了判定手段、脱出完了判定手段、
エンスト予測手段、カウント手段、脱出方向判定手段)
24 ブレーキアクチュエータ(ブレーキ駆動手段)
【技術分野】
【0001】
本発明は車両のスタック脱出装置に係り、詳しくは泥濘地等において駆動輪が空転して路面に生じた窪みにスタックしたときに、クラッチの断接に応じて駆動輪を断続的に駆動しながら、窪み内で駆動輪を前後方向に揺り動かして脱出させるスタック脱出装置に関するものである。
【背景技術】
【0002】
泥濘地等のように摩擦係数が低く且つ柔らかい路面の走行時には、駆動輪のスリップにより路面に生じた窪みに駆動輪が嵌り込んだスタック状態に陥ってしまう場合がある。スタック状態からの脱出には、例えばクラッチ操作を伴って手動で変速操作する手動式変速機を備えた車両では、ギヤを1速や2速に入れた上でクラッチを断接操作し、窪み内で駆動輪を前後方向に転動させながら往復ストロークを次第に増加させて脱出する方法が採られる。
【0003】
ところが、クラッチ操作を自動化した車両、例えば上記手動変速機を備えた車両と基本構成を共通としながら、クラッチの断接操作及び変速機の変速操作をアクチュエータで行う車両では、運転者が任意にクラッチ操作できないため、必然的に上記したスタック脱出方法を実施することはできない。そこで、このような不具合に対処すべく、スタック状態からの脱出を自動的に実行するスタック脱出装置が提案されている(例えば、特許文献1参照)。
【0004】
上記特許文献1の技術では、エンジンに対してトルクコンバータ及びプラネタリギヤユニットからなる動力伝達装置を接続し、この動力伝達装置を介してエンジンからの駆動力を駆動輪に伝達するように構成されている。本スタック脱出装置では、基本的に駆動輪に設けた車速センサの出力に基づきプラネタリギヤユニットのフロントクラッチを断接操作してスタック脱出が図られる。
【0005】
フロントクラッチは、車速センサにより検出された車速が値0以上のときを条件としてON(接続)され、車速が値0未満のときを条件としてOFF(遮断)される。車速が値0以上とは、窪み内で駆動輪が前進方向に転動していることを意味するため、クラッチONで駆動輪を駆動することにより窪み内で駆動輪を前進方向に登らせ(脱出動作)、一方、車速が値0未満とは、窪み内で駆動輪が後退方向に転動していることを意味するため、クラッチOFFで駆動輪の回転駆動を中止することにより、車両の自重により駆動輪を窪み内で後退方向に登らせ(反転動作)、これらの脱出動作と反転動作とを交互に繰り返すことで、窪み内で駆動輪を前後方向に転動させ車両を揺り動かしながら窪み内から脱出させている。
【特許文献1】特開平9−175225号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1の技術では、脱出動作から反転動作への切換を適切なタイミングで実行できず、かえってスタック状態を悪化させてしまうという問題を引き起こすことが考えられる。
このような問題を生じる要因は、特許文献1の技術が窪み内での駆動輪の挙動を把握しきれていないことに起因する。即ち、このスタック脱出方法の趣旨は、断続的な駆動により駆動輪を窪み内で前後方向への転動を繰り返しながら往復ストロークを次第に増加させることにあり、往復ストロークが窪みの領域を上回った時点で駆動輪が窪みから脱出する。脱出に至るまでの駆動輪は、窪み内での後退方向への転動時には、車両の自重による慣性力を消費した時点で前進方向に転じるだけのため、このときの車速は値0となり、窪みを登った頂点で脱出動作に切り換えることができる。
【0007】
ところが、駆動輪の前進方向への転動時には、伝達される駆動力が路面との摩擦係数を上回った時点で駆動輪がスリップを生じるため、窪み内を登った頂点でも車速センサにより検出された車速は値0以上の値を継続し、反転動作への切換が行われなくなる。結果として駆動輪のスリップが継続されて窪みがさらに拡大し、スタック状態がかえって悪化させて脱出不能に陥るという問題があった。
【0008】
本発明はこのような問題点を解決するためになされたもので、その目的とするところは、脱出動作から反転動作への切換を適切なタイミングで実行でき、もってスタック状態から迅速且つ確実に脱出することができる車両のスタック脱出装置を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するため、請求項1の発明は、エンジンの駆動力をクラッチの断接動作に応じて変速機を介して駆動輪に伝達する車両に搭載され、駆動輪が路面の窪みにスタックしたときに、クラッチを接続してエンジンの駆動力で駆動輪を脱出方向に回転駆動する脱出動作と、クラッチを遮断して車両の自重により駆動輪を窪み内で反脱出方向に転動させる反転動作とを交互に繰り返しながら、窪み内での駆動輪の往復ストロークを次第に増加させて窪み内から駆動輪を脱出させるスタック脱出制御手段を備えた車両のスタック脱出装置において、スタック脱出制御手段による脱出動作の実行中において、従動輪の車輪速が予め設定された停車判定値未満で、且つ駆動輪と従動輪との車輪速差が予め設定されたスリップ判定値以上になったときに、脱出動作の終了判定を下す終了判定手段を備え、スタック脱出制御手段が、終了判定手段により終了判定が下されたときに脱出動作から反転動作に切り換えるものである。
【0010】
従って、車両の駆動輪が路面の窪みにスタックしたときには、スタック脱出制御手段により脱出動作と反転動作とが交互に繰り返されることにより、窪み内で駆動輪は前後方向への転動を繰り返しながら往復ストロークを次第に増加して窪み内から脱出する。脱出動作では、駆動輪が脱出方向に転動しながら窪み内を登り、駆動力が路面との摩擦係数を上回った時点で駆動輪はスリップし始めて停止し、脱出方向に移動していた車両もほぼ停止する。これにより従動輪の車輪速が停車判定値未満となると共に、駆動輪と従動輪との車輪速差がスリップ判定値以上になり、終了判定手段により脱出動作の終了判定が下されて、スタック脱出制御手段により脱出動作から反転動作への切換が実行される。
【0011】
脱出動作においては、駆動輪はスリップしない限り脱出方向に転動しながら窪み内を登る一方、駆動輪がスリップし始めると窪みが拡大してスタックが悪化する可能性が高まるため、基本的に脱出動作の終了判定は、駆動輪のスリップ状況を指標とすることが望ましい。但し、路面状況によっては窪み内で駆動輪がスリップしながらも登り続けることもあり、この場合には駆動輪が窪みを登り続けて車両が脱出方向に移動する限り、駆動輪の駆動を継続することが望ましい。従って、従動輪の車輪速が停車判定値未満で、且つ駆動輪と従動輪との車輪速差がスリップ判定値以上になったことを条件として、脱出動作を終了することにより、無用なスリップの継続により窪みを拡大してスタックを悪化させることなく、窪み内の可能な限り高い位置まで駆動輪を登らせて往復ストロークの増加に貢献でき、もってスタック状態から迅速且つ確実に脱出可能となる。
【0012】
請求項2の発明は、請求項1において、スタック脱出制御手段による脱出動作の実行中において、脱出動作を開始してからの従動輪の転動距離が予め設定された脱出完了判定値以上になったときに脱出完了判定を下す脱出完了判定手段を備え、スタック脱出制御手段が、脱出完了判定手段により脱出完了判定が下されたときに制御を中止するものである。
従って、例えば脱出完了判定値として、一般的な窪み内での駆動輪の転動に伴って従動輪が転動する距離よりも十分に大きな値に設定されることにより、脱出動作を開始してからの従動輪の転動距離が脱出完了判定値以上になったときには、駆動輪の窪みからの脱出が完了したものと見なせる。よって、脱出完了判定手段の脱出完了判定に基づいてスタック脱出制御手段の制御が中止され、脱出動作の終了に伴ってクラッチが遮断されて駆動輪の駆動力が消失することから、車両は惰性により緩やかに脱出方向に移動するだけとなり、脱出後に円滑に運転者の操作による通常の走行に移行可能となる。
【0013】
請求項3の発明は、請求項1において、スタック脱出制御手段による脱出動作の実行中において、エンジンの回転速度と相関するエンジン回転速度相関値が予め設定されたエンスト予測判定値未満になったときにエンスト予測を下すエンスト予測手段を備え、スタック脱出制御手段が、エンスト予測手段によりエンスト予測が下されたときに、終了判定手段が終了判定を下していなくても脱出動作から反転動作に切り換えるものである。
【0014】
従って、窪みからの脱出時の駆動輪は路面との摩擦係数を瞬間的に急増する現象を発生させ、そのまま脱出完了すれば問題ないが、僅かのところで窪みからの脱出に成功しなかった場合には、摩擦係数の急増による負荷がエンジンに及んでエンスト(エンジン停止)により駆動輪は窪み内で再び停止し、最初からスタック脱出制御をやり直す必要が生じる。本発明では、摩擦係数の増加によりエンジン回転速度相関値(例えばエンジン回転速度或いは駆動輪の車輪速等)がエンスト予測判定値未満になると、エンスト予測手段のエンスト予測を受けてスタック脱出制御手段により脱出動作から反転動作への切換が実行されるため、エンストを未然に防止してスタック脱出制御を継続可能となる。
【0015】
請求項4の発明は、請求項1において、スタック脱出制御手段による脱出動作の試行回数をカウントするカウント手段を備え、スタック脱出制御手段が、カウント手段のカウント値が予め設定された連続試行制限値に達したときに制御を中止するものである。
従って、脱出動作の実行毎にクラッチは接続操作されて温度上昇により消耗するが、カウント手段によりカウントされる脱出動作の試行回数が連続試行制限値に達した時点でスタック脱出制御手段の制御が中止されるため、連続的な接続操作による急激なクラッチの消耗が抑制される。
【0016】
請求項5の発明は、請求項1において、窪み内からの上記駆動輪の脱出方向を判定する脱出方向判定手段と、車両のブレーキを作動させるブレーキ駆動手段とを備え、スタック脱出制御手段が、脱出方向判定手段により駆動輪が車両の後退方向に脱出したと判定されたときに、ブレーキ駆動手段によりブレーキを作動させるものである。
従って、駆動輪が窪み内から車両の後退方向に脱出して、そのまま脱出方向に車両を移動させ続けると従動輪を窪みにスタックさせてしまうが、このときにはブレーキ駆動手段によりブレーキが作動するため、従動輪のスタックが未然に防止される。
【発明の効果】
【0017】
以上説明したように請求項1の発明の車両のスタック脱出装置によれば、脱出動作から反転動作への切換を適切なタイミングで実行でき、もってスタック状態から迅速且つ確実に脱出することができる。
請求項2の発明の車両のスタック脱出装置によれば、請求項1に加えて、スタックからの脱出完了を的確に判定でき、脱出後に円滑に運転者の操作による通常の走行に移行することができる。
【0018】
請求項3の発明の車両のスタック脱出装置によれば、請求項1に加えて、脱出動作の実行中のエンストを未然に防止してスタック脱出制御を継続でき、もってスタック脱出制御をやり直したときのスタック状態の悪化による脱出不能を回避して、迅速にスタックから脱出することができる。
請求項4の発明の車両のスタック脱出装置によれば、請求項1に加えて、連続的な接続操作による急激なクラッチの消耗を抑制し、クラッチ故障による走行不能の事態を未然に回避することができる。
【0019】
請求項5の発明の車両のスタック脱出装置によれば、請求項1に加えて、窪みから駆動輪を脱出させた直後の従動輪のスタックを未然に防止でき、もってスタックからの脱出性能をさらに向上させることができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明を機械式自動変速機を備えたトラックのスタック脱出装置に具体化した一実施形態を説明する。
図1は本発明のスタック脱出装置が搭載されたトラックを示す全体構成図である。
車両の図示しないキャブの下側にはディーゼルエンジン1が搭載され、エンジン1にはクラッチ2を介して変速機3が連結されている。クラッチ2は、一般的な手動式の乾式クラッチと同様の構成であるが、後述するようにアクチュエータの駆動により断接操作される自動クラッチとして機能する。同じく変速機3は、複数の変速段をシンクロ機構で回転同期させて切り換える手動式変速機と同様の構成であるが、後述するようにアクチュエータの駆動により自動的に変速操作される機械式自動変速機として機能する。変速機3にはプロペラシャフト4を介してディファレンシャル機構5が連結され、ディファレンシャル機構5は左右のドライブシャフト6を介して後輪7b(駆動輪)と連結されている。
【0021】
従って、エンジン1の駆動力はクラッチ2の断接状態に応じて変速機3に入力され、変速機3の変速段に応じて変速された後、プロペラシャフト4、ディファレンシャル機構5、ドライブシャフト6を介して左右の後輪7bに伝達され、後輪7bに発生した駆動力により車両が走行する。
車室内には、図示しない入出力装置、制御プログラムや制御マップ等の記憶に供される記憶装置(ROM、RAM、BURAM等)、中央処理装置(CPU)、タイマカウンタ等を備えた車両ECU9(電子制御ユニット)及びエンジンECU10が設置されている。車両ECU9は、例えばクラッチ2の断接操作を含めた変速機3の自動変速制御や後述する泥濘地でのスタック脱出制御等のような車両全体の統合的な制御を実行すると共に、これらの制御での最適なエンジン出力を実現すべくエンジンECU10側に指令を出力する。エンジンECU10は主に燃料噴射制御等のエンジン制御を実行し、例えば運転者のアクセル操作に応じたエンジン出力の調整、或いは上記のように車両ECU9側からの指令に基づくエンジン出力の調整、さらにエンジン1の排気系に設けられた図示しない排気浄化装置を最適条件で機能させるための各種排気浄化制御等を行う。
【0022】
これらの制御を実行するために、車両ECU9はエンジンECU10と電気的に接続されると共に、車両ECU9の入力側には、アクセルペダル11の操作量θaccを検出するアクセルセンサ12、ブレーキペダル13の踏み込み操作を検出するブレーキスイッチ14、ニュートラル(N)、ドライブ(D)、リバース(R)等のセレクトレバー15の操作位置を検出するセレクトレバー位置センサ16、エンジン回転速度Neを検出するエンジン回転速度センサ17、変速機3の出力軸回転速度Noutを検出する出力軸回転速度センサ18、左右の前輪7a(従動輪)及び後輪7bの車輪速Nf,Nrを検出する車輪速センサ19、スタック脱出制御の開始を指示するためのスタートスイッチ20等の各種センサ・スイッチ類が接続されている。
【0023】
また、車両ECU9の出力側には、クラッチ2を断接操作するためのクラッチアクチュエータ21、変速機3の変速段を切り換えるための変速アクチュエータ22、左右の後輪7bのブレーキ23を作動させるためのブレーキアクチュエータ24(ブレーキ駆動手段)、スタック脱出制御の実行を表示するための表示ランプ25等のデバイス類が接続されている。
【0024】
なお、本実施形態では、これらのアクチュエータ21,22,24を共通の油圧発生源から供給される油圧を利用して作動させているが、アクチュエータ21,22,24の作動原理はこれに限定されるものではなく、エアや電動モータを利用したものに代えてもよい。また、ブレーキアクチュエータ24は後輪7bに代えて前輪7a、或いは前後輪7a,7bに設けてもよい。
【0025】
また、エンジンECU10の入力側には、上記アクセルセンサ12等の各種センサ類が接続され、エンジンECU10の出力側には、エンジン1の図示しない燃料噴射弁等のデバイス類が接続されている。
例えば車両ECU9は、セレクトレバー位置センサ16により検出されたセレクトレバー15の操作位置に応じて、変速アクチュエータ22により変速機3をニュートラル、ドライブ、リバースに切り換えると共に、アクセルセンサ12により検出されるアクセル操作量θaccの増加に応じて、クラッチアクチュエータ21によりクラッチ2を接続しながらエンジンECU10にエンジン出力の増加指令を出力し、これにより車両を前方或いは後方に発進させる。また、ドライブ位置での走行中には、車両ECU9は、アクセルセンサ12からのアクセル操作量θacc、及び出力軸回転速度センサ18の検出値から求めた車速V(ディファレンシャル機構5のギヤ比及び後輪7bの直径より換算)から設定した目標変速段に基づき、クラッチ2を断接操作しながら実際の変速段を切り換えると共に、変速中にはエンジンECU10に一時的なエンジン出力の低下指令を出力する。
【0026】
また、車両ECU9は泥濘地等で車両がスタック(路面に生じた窪みに後輪7bが嵌り込んだ状態を指す)したときに、スタックから脱出すべく図2,3に示すルーチンに従ってスタック脱出制御を実行している。そこで、これら図2,3、及び前方へのスタック脱出過程を表した図4〜9の説明図に基づき、当該スタック脱出制御について詳述する。
車両ECU9は予め設定されたスタック脱出制御開始条件が成立したときに、図2,3に示すスタック脱出制御ルーチンを所定の制御インターバルで実行する。スタック脱出制御開始条件としては、以下の要件1)〜7)が設定されており、車両ECU9は、全ての要件が満たされたときにスタック脱出制御開始条件が成立したとしてスタック脱出制御ルーチンを開始する。
1)スタートスイッチ20がONされていること。
2)セレクトレバー15がD位置またはR位置であること。
3)エンジン1がアイドル運転中であること(アクセル操作無し)。
4)ブレーキスイッチ14がONされていること(ブレーキ操作中)。
5)スタートスイッチ20のONに呼応して表示ランプ25が点灯していること。
6)前輪7aの車輪速Vf(左右の平均値を適用し、以下の車輪速Vfも同様)≦2km/hであること。
7)要件6)の成立時間≧2secであること。
【0027】
要件1)〜4)は、車両のスタックを認識した運転者がスタック脱出制御の実行を要求する意志表示の確認であり、要件5)は、運転者の意志表示に対してスタック脱出制御を実行する旨が正常に表示されていることの確認であり、要件6),7)は、車両が停車してスタック脱出制御を開始可能な状況であることの確認である。要件6では、従動輪である前輪7aの車輪速Vfを車速Vと見なしているが、これに限らず、例えば上記のように出力軸回転速度Noutから車速Vを算出してもよい。なお、車速V=2km/hは車輪速センサ19の限界感度であり、2km/h以下を停車と見なしている。
【0028】
ここで、要件2)はスタック脱出制御の要求のみならず、希望するスタックからの脱出方向も含み、運転者は前方への脱出を希望するときにはセレクトレバー15をD位置とし、後方への脱出を希望するときにはR位置としている。
以上のスタック脱出制御開始条件が成立したときに、車両ECU9は図2,3のスタック脱出制御ルーチンを開始する。
【0029】
基本的にスタック脱出制御は、クラッチ2を断接操作して後輪7bを断続的に駆動することにより、窪み内で後輪7bを前後方向への転動を繰り返しながら往復ストロークを次第に増加させて、車両を前後方向に揺り動かしながら窪み内から脱出させる原理を利用している(スタック脱出制御手段)。以下の説明では、後輪7bを脱出方向(セレクトレバー15のD位置またはR位置により定まる)に駆動して窪み内を登らせる動作を脱出動作と称し、駆動を中止して脱出動作により自車の自重で後輪7bを反脱出方向に転動させて窪み内を登らせる動作を反転動作と称する。
【0030】
車両ECU9は、まず、ステップS2でブレーキスイッチ14がOFFになったか否かを判定する。運転者が意図的にブレーキ操作を解除したときにはスタック脱出制御の開始タイミングと見なし、ステップS2でYes(肯定)の判定を下してステップS4に移行する。ステップS4では脱出動作の開始条件が成立したか否かを判定する。脱出動作の開始条件としては、以下の要件8),9)が設定されている。
8)前輪7aの車輪速Vf≦2km/hであること。
9)クラッチ遮断からの経過時間≧0.5secであること。
【0031】
車両ECU9は要件8),9)が共に満たされているときに脱出動作の開始条件が成立したと見なす。後述する脱出動作が終了する時点でも車両停止により要件8)が満たされるため、このような状況を除外して脱出動作の開始のみを判定するために、要件9)が追加されているのである。
車両ECU9はステップS4の判定がNo(否定)の間はステップS2,4を繰り返し、判定がYesになるとステップS6に移行する。ステップS6では脱出動作の実行毎にカウントアップされる試行回数Nが予め設定された連続試行制限値N0に達したか否かを判定し(カウント手段)、判定がNoのときにはステップS8に移行する。なお、ステップS6の処理の趣旨については後述する。
【0032】
ステップS8では、脱出動作としてクラッチ接続及びエンジン出力増加の処理を実行する。即ち、車両ECU9はクラッチアクチュエータ21によりクラッチ2を駆動して接続操作すると共に、エンジンECU10にエンジン出力を所定値まで増加させるべく指令を出力する。所定値としては、摩擦係数の低い泥濘地であることを考慮して通常路面での発進時に要求されるエンジン出力よりも多少低く、且つその際にエンストしない程度の値が設定される。
【0033】
クラッチ接続に伴って後輪7bにはセレクトレバー15の位置に応じた方向にエンジン1の駆動力が伝達され、その結果、セレクトレバー15がD位置のときには、図4に示すように後輪7bは窪みD内で前方へ転動し始め、Rレンジのときには、図示はしないが後輪7bは窪みD内で後方に転動し始める。
続くステップS10では脱出動作の終了条件(換言すれば、反転動作の開始条件)が成立したか否かを判定する(終了判定手段)。脱出動作の終了条件としては、以下の要件10),11)が設定されている。
10)前輪7aの車輪速Vf≦2km/hであること。
11)前輪7aの車輪速Vfと後輪7bの車輪速Vr(左右の平均値)との差の絶対値|Vf−Vr|≧スリップ判定値Vslipであること。
【0034】
車両ECU9は要件10),11)が共に満たされているときに脱出動作の終了条件が成立したと見なす。
駆動力の伝達により後輪7bは転動しながら窪みD内を前方または後方に登るが、後輪7bに伝達される駆動力が路面との摩擦係数を上回った時点で、図5に示すように後輪7bはスリップし始める。スリップによる摩擦係数の低下により後輪7bの駆動力は急減するため、この位置を窪みD内を登った頂点として後輪7bは当該位置に停止したままスリップし続ける。結果として窪みD内での後輪7bの転動に応じて前進または後退していた車両もほぼ停止し、上記要件10)が満たされると共に、後輪7bのスリップにより要件11)も満たされる。なお、スリップ判定値Vslipとしては、例えば10km/hが設定されている。
【0035】
上記要件10),11)は、以下の知見の基に設定されたものである。
脱出動作においては、後輪7bはスリップしない限り脱出方向に転動しながら窪みD内を登る一方、後輪7bがスリップし始めると窪みDが拡大してスタックが悪化する可能性が高まるため、基本的に脱出動作の終了判定は、後輪7bのスリップ状況を指標とすることが望ましい。但し、路面状況によっては窪みD内で後輪7bがスリップしながらも登り続けることもあり、この場合には後輪7bが窪みDを登り続ける限り、換言すれば車両が脱出方向に移動する限り、後輪7bの駆動を継続することが望ましい。
【0036】
従って、従動輪である前輪7aの車輪速Vf≦2km/hで、且つ前輪7aと後輪7bとの車輪速差|Vf−Vr|≧スリップ判定値Vslipであることを脱出動作の終了条件とすれば、常に最適なタイミングで脱出動作を終了できる。これにより、無用なスリップの継続により窪みDを拡大してスタック状態を悪化させることなく、窪みD内の可能な限り高い位置まで後輪7bを登らせて往復ストロークの増加に貢献でき、もってスタック状態から迅速且つ確実に脱出することができる。
【0037】
車両ECU9は、ステップS10の判定がNoのときにはステップS12に移行し、エンジン回転速度Neがエンスト予測判定値Ne0未満であるか否かを判定する(エンスト判定手段)。エンスト予測判定値Ne0はエンストを回避可能な下限近傍の回転速度、例えば500rpmが設定されている。なお、クラッチ2を接続した脱出動作の実行中では、エンジン回転速度Neと後輪7bの車輪速Vrとが相関しているため、エンジン回転速度Neに代えて車輪速Vr(エンジン回転速度相関値)に基づいて判定を実行してもよい。
【0038】
ステップS12の判定がNoのときにはステップS14に移行し、脱出完了条件が成立したか否かを判定する(脱出完了判定手段)。脱出完了条件としては、以下の要件12)が設定されている。
12)今回の脱出動作を開始してからの前輪7aの転動距離Lf≧脱出完了判定値Lf0であること。
【0039】
脱出完了判定値Lf0は、一般的な窪みD内での後輪7bの転動に伴って前輪7aが転動する距離よりも十分に大きな値であり、且つ車両のホイールベースに比較して十分に小さな値、例えば1mが設定されている。ステップS14の判定がNoのときには、後輪7bが窪みD内から脱出していないと見なして上記ステップS10に戻り、脱出動作を継続しながらステップS10〜14の処理を実行する。
【0040】
多くのケースでは最初の脱出動作のみでスタック脱出に成功することはなく、脱出動作と反転動作とを繰り返してスタック脱出を図ることになる。従って、通常はステップS10でYesの判定を下してステップS16に移行する。ステップS16では、反転動作としてクラッチ遮断及びエンジン出力低下の処理を実行する。即ち、車両ECU9はクラッチアクチュエータ21によりクラッチ2を遮断操作すると共に、エンジンECU10にエンジン出力をアイドル相当値まで低下させるべく指令を出力する。
【0041】
クラッチ遮断に伴って後輪7bは駆動力を消失し、図6に示すように車両の自重により窪みD内で反脱出方向に転動し、窪みD内を反脱出方向に登り始める。
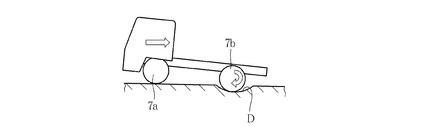
その後、車両ECU9はステップS2,4の処理を繰り返し、ステップS4の判定がYes(脱出動作の開始条件が成立)になると、ステップS6を経てステップS8で脱出動作を開始する。従って、図7に示すように、窪みD内を反脱出方向に進行し、ステップS2〜6の条件を満たしたときに後輪7bは再び脱出方向に駆動され、窪みD内を脱出方向に転動し始める。以上のように、ステップS8の脱出動作及びステップS16の反転動作の繰り返しにより、後輪7bは窪みD内で前後方向への転動を繰り返しながら往復ストロークを次第に増加させる。
【0042】
ここで、脱出動作の実行毎にクラッチ2は接続操作されるため、急激に温度上昇することにより著しく消耗する。ステップS6の連続試行制限値N0としては、クラッチ2が連続的に接続操作されても支障ない程度の回数、例えば10回が設定されており、試行回数Nが連続試行制限値N0に達したときには、ステップS6でYesの判定を下してステップS18で表示ランプ25を消灯した後、一旦ルーチンを終了する。
【0043】
表示ランプ25の消灯或いはスタック脱出のための車両挙動の中止等から、運転者はスタック脱出制御の中断を認識し、クラッチ温度が低下するまで待機した後に、再び上記と同様の手順によりスタック脱出制御を再開する。従って、連続的な接続操作による急激なクラッチ2の消耗を抑制でき、もってクラッチ故障による走行不能の事態を未然に回避することができる。なお、ステップS18では、表示ランプ25の消灯に代えて、しばらく待機することを勧めるメッセージを運転者に対して表示してもよい。
【0044】
そして、脱出動作及び反転動作の繰り返しにより窪みD内での後輪7bの往復ストロークは増加するため、何れかの脱出動作の実行中において後輪7bは窪みDを登り切り、図8に示すように前方に脱出するか、或いは図9に示すように後方に脱出する。
このときの後輪7bは、上記スリップ時とは逆に路面との摩擦係数を瞬間的に急増する現象を発生させる。そのまま後輪7bが窪みD内からの脱出を完了すれば後は惰性で転動するだけのため問題ないが、僅かのところで窪みDからの脱出に成功しなかった場合には、摩擦係数の急増による負荷がエンジン1に及ぶことからエンストを生じて後輪7bは窪みD内で再び停止してしまう。従って、最初からスタック脱出制御をやり直す必要が生じ、脱出に時間を要するばかりでなく、スタック状態の悪化により脱出不能に陥る虞も生じる。
【0045】
このような場合、本実施形態ではステップS12の判定がYesになることを受けてステップS16でクラッチ2が遮断されるため、エンストを未然に防止できる。よって、引き続きステップS12〜16の処理より脱出動作及び反転動作を実行でき、スタック脱出制御のやり直したときのスタック状態の悪化により脱出不能を回避できると共に、迅速にスタック状態から脱出することができる。
【0046】
一方、上記ステップS14の判定がYesになると、車両ECU9は窪みDから後輪7bが脱出したと見なしてステップS20に移行し、脱出方向が後退方向であるか否かを判定する(脱出方向判定手段)。当該ステップS20の判定は、例えば、上記要件12)が成立したときの前輪7aの転動方向に基づき行われる。ステップS20の判定がNoのときにはステップS22に移行し、上記した反転動作と同じくクラッチ2を遮断操作すると共に、エンジンECU10にエンジン出力の低下指令を出力し、続くステップS24で表示ランプ25を消灯した後にルーチンを終了する。
【0047】
結果として車両は、スタック脱出制御を開始した当初の要件2)のD位置またはR位置、及び要件3)のアクセルOFFに基づく運転者の操作と整合する運転状態となり、後輪7bは窪みDから脱出した時点でクラッチ遮断により駆動力を消失し、車両は惰性により緩やかに前進または後退するだけとなる。表示ランプ25の消灯或いはスタック脱出したときの車両の挙動から、運転者はスタック脱出を認識して自己の運転操作により引き続いて車両を走行させる。
【0048】
このように脱出完了判定に基づくクラッチ遮断の処理により、車両が窪みDからの脱出した勢いで前方または後方に飛び出す事態が防止され、脱出後に円滑に運転者による通常の走行に移行できる。この要因は、スタック状態から脱出する際の運転操作を容易化することに貢献する。
また、ステップS20の判定がYesのときには、ステップS26でブレーキアクチュエータ24によりブレーキ23を作動させる。その後、車両ECU9はステップS28でアクセルセンサ12の出力に基づき運転者によりアクセル操作が行われたか否かを判定し、判定がNoの間はステップS26でブレーキ23の作動を継続する。運転者がスタック状態からの脱出を認識して車両を走行させるべくアクセル操作を開始すると、車両ECU9はステップS28でYesの判定を下し、続くステップS30でブレーキ23を解除した後に上記ステップS22に移行する。
【0049】
ステップS20の判定がYesのときには、図9に示すように後輪7bを車両の後退方向に脱出させて車両が惰性により後退中であると見なせ、そのまま後退を継続すると前輪7aを窪みDにスタックさせてしまう可能性がある。ステップS26の処理により、前輪7aの転動距離Lfが脱出完了判定値Lf0に達した時点でブレーキ23による制動で車両が停止するため、このような前輪7aのスタックを未然に防止でき、結果としてスタック状態からの脱出性能をさらに向上させることができる。
【0050】
以上で実施形態の説明を終えるが、本発明の態様はこの実施形態に限定されるものではない。例えば上記実施形態では、ディーゼルエンジンを走行用駆動源とした後輪駆動のトラックに適用したが、車両の種別や走行用駆動源の種別はこれに限ることはなく、例えばFF駆動の乗用車に適用したり、エンジンとモータとを走行用駆動源とするハイブリッド車両に適用したりしてもよい。
【0051】
また、上記実施形態では、クラッチ2の断接操作及び変速操作を自動化した機械式自動変速機3を搭載した車両を対象としたが、これに限ることはない。例えばクラッチ2の断接操作のみを自動化した機械式手動変速機を備えた車両に適用し、上記実施形態と同様にクラッチ2を断接操作して脱出動作と反転動作を交互に実行すると共に、脱出動作でのエンジン出力の調整は運転者に委ねてもよい。また、上記特許文献1に記載されたトルクコンバータ付きの自動変速機を備えた車両に適用し、上記実施形態と同様にフロントクラッチを断接操作してもよい。また、上記実施形態の構成において、脱出動作でのエンジン出力の調整を自動化せずに、運転者が出力調整するようにしてもよい。
【0052】
また、上記実施形態では、要件11)として、前輪7aと後輪7bとの車輪速差に基づいて後輪7bのスリップを判定したが、これに限ることはなく、例えば左右の後輪7bの車輪速差が所定値以上になることを要件11)として設定してもよいし、或いは左右の後輪7bの何れかの回転速度が所定変化率以上で急増することを要件11)として設定してもよい。
【図面の簡単な説明】
【0053】
【図1】本発明のスタック脱出装置が搭載されたトラックを示す全体構成図である。
【図2】車両ECUが実行するスタック脱出制御ルーチンを示すフローチャートである。
【図3】車両ECUが実行するスタック脱出制御ルーチンを示すフローチャートである。
【図4】窪み内での停止状態からクラッチ接続により車両前方への脱出動作を開始したときの説明図である。
【図5】脱出動作中に後輪がスリップし始めたときの説明図である。
【図6】脱出動作からクラッチ遮断により反転動作に切り換えられたときの説明図である。
【図7】反転動作からクラッチ接続により脱出動作に切り換えられたときの説明図である。
【図8】前方への脱出を完了したときの説明図である。
【図9】後方への脱出を完了したときの説明図である。
【符号の説明】
【0054】
1 エンジン
2 クラッチ
7a 前輪(従動輪)
7b 後輪(駆動輪)
9 車両ECU(スタック脱出制御手段、終了判定手段、脱出完了判定手段、
エンスト予測手段、カウント手段、脱出方向判定手段)
24 ブレーキアクチュエータ(ブレーキ駆動手段)
【特許請求の範囲】
【請求項1】
エンジンの駆動力をクラッチの断接動作に応じて変速機を介して駆動輪に伝達する車両に搭載され、該駆動輪が路面の窪みにスタックしたときに、上記クラッチを接続して上記エンジンの駆動力で上記駆動輪を脱出方向に回転駆動する脱出動作と、上記クラッチを遮断して車両の自重により上記駆動輪を窪み内で反脱出方向に転動させる反転動作とを交互に繰り返しながら、上記窪み内での駆動輪の往復ストロークを次第に増加させて該窪み内から駆動輪を脱出させるスタック脱出制御手段を備えた車両のスタック脱出装置において、
上記スタック脱出制御手段による脱出動作の実行中において、従動輪の車輪速が予め設定された停車判定値未満で、且つ上記駆動輪と上記従動輪との車輪速差が予め設定されたスリップ判定値以上になったときに、上記脱出動作の終了判定を下す終了判定手段を備え、
上記スタック脱出制御手段は、上記終了判定手段により終了判定が下されたときに上記脱出動作から上記反転動作に切り換えることを特徴とする車両のスタック脱出装置。
【請求項2】
上記スタック脱出制御手段による脱出動作の実行中において、上記脱出動作を開始してからの従動輪の転動距離が予め設定された脱出完了判定値以上になったときに脱出完了判定を下す脱出完了判定手段を備え、
上記スタック脱出制御手段は、上記脱出完了判定手段により脱出完了判定が下されたときに制御を中止することを特徴とする請求項1記載の車両のスタック脱出装置。
【請求項3】
上記スタック脱出制御手段による脱出動作の実行中において、上記エンジンの回転速度と相関するエンジン回転速度相関値が予め設定されたエンスト予測判定値未満になったときにエンスト予測を下すエンスト予測手段を備え、
上記スタック脱出制御手段は、上記エンスト予測手段によりエンスト予測が下されたときに、上記終了判定手段が終了判定を下していなくても上記脱出動作から上記反転動作に切り換えることを特徴とする請求項1記載の車両のスタック脱出装置。
【請求項4】
上記スタック脱出制御手段による脱出動作の試行回数をカウントするカウント手段を備え、
上記スタック脱出制御手段は、上記カウント手段のカウント値が予め設定された連続試行制限値に達したときに制御を中止することを特徴とする請求項1記載の車両のスタック脱出装置。
【請求項5】
上記窪み内からの上記駆動輪の脱出方向を判定する脱出方向判定手段と、
上記車両のブレーキを作動させるブレーキ駆動手段とを備え、
上記スタック脱出制御手段は、上記脱出方向判定手段により上記駆動輪が上記車両の後退方向に脱出したと判定されたときに、上記ブレーキ駆動手段によりブレーキを作動させることを特徴とする請求項1記載の車両のスタック脱出装置。
【請求項1】
エンジンの駆動力をクラッチの断接動作に応じて変速機を介して駆動輪に伝達する車両に搭載され、該駆動輪が路面の窪みにスタックしたときに、上記クラッチを接続して上記エンジンの駆動力で上記駆動輪を脱出方向に回転駆動する脱出動作と、上記クラッチを遮断して車両の自重により上記駆動輪を窪み内で反脱出方向に転動させる反転動作とを交互に繰り返しながら、上記窪み内での駆動輪の往復ストロークを次第に増加させて該窪み内から駆動輪を脱出させるスタック脱出制御手段を備えた車両のスタック脱出装置において、
上記スタック脱出制御手段による脱出動作の実行中において、従動輪の車輪速が予め設定された停車判定値未満で、且つ上記駆動輪と上記従動輪との車輪速差が予め設定されたスリップ判定値以上になったときに、上記脱出動作の終了判定を下す終了判定手段を備え、
上記スタック脱出制御手段は、上記終了判定手段により終了判定が下されたときに上記脱出動作から上記反転動作に切り換えることを特徴とする車両のスタック脱出装置。
【請求項2】
上記スタック脱出制御手段による脱出動作の実行中において、上記脱出動作を開始してからの従動輪の転動距離が予め設定された脱出完了判定値以上になったときに脱出完了判定を下す脱出完了判定手段を備え、
上記スタック脱出制御手段は、上記脱出完了判定手段により脱出完了判定が下されたときに制御を中止することを特徴とする請求項1記載の車両のスタック脱出装置。
【請求項3】
上記スタック脱出制御手段による脱出動作の実行中において、上記エンジンの回転速度と相関するエンジン回転速度相関値が予め設定されたエンスト予測判定値未満になったときにエンスト予測を下すエンスト予測手段を備え、
上記スタック脱出制御手段は、上記エンスト予測手段によりエンスト予測が下されたときに、上記終了判定手段が終了判定を下していなくても上記脱出動作から上記反転動作に切り換えることを特徴とする請求項1記載の車両のスタック脱出装置。
【請求項4】
上記スタック脱出制御手段による脱出動作の試行回数をカウントするカウント手段を備え、
上記スタック脱出制御手段は、上記カウント手段のカウント値が予め設定された連続試行制限値に達したときに制御を中止することを特徴とする請求項1記載の車両のスタック脱出装置。
【請求項5】
上記窪み内からの上記駆動輪の脱出方向を判定する脱出方向判定手段と、
上記車両のブレーキを作動させるブレーキ駆動手段とを備え、
上記スタック脱出制御手段は、上記脱出方向判定手段により上記駆動輪が上記車両の後退方向に脱出したと判定されたときに、上記ブレーキ駆動手段によりブレーキを作動させることを特徴とする請求項1記載の車両のスタック脱出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−78592(P2009−78592A)
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願番号】特願2007−247324(P2007−247324)
【出願日】平成19年9月25日(2007.9.25)
【出願人】(303002158)三菱ふそうトラック・バス株式会社 (1,037)
【Fターム(参考)】
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願日】平成19年9月25日(2007.9.25)
【出願人】(303002158)三菱ふそうトラック・バス株式会社 (1,037)
【Fターム(参考)】
[ Back to top ]