
車両のブレーキ制御装置
【課題】車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧アクチュエータ2と、統合コントローラ9と、を備え、統合コントローラ9は、停車時モータオフ制御部(ステップS9)と、昇圧勾配制限部(ステップS15〜ステップS20)と、を有する。停車時モータオフ制御部は、ブレーキ操作により車両が停止するとき、VDCモータ21を停止し、車両停止中、VDCモータ21の停止状態を維持したままとする。昇圧勾配制限部は、停車時モータオフ制御を終了すると、ホイールシリンダ圧の昇圧勾配を制限により緩勾配にすると共に、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配より緩やかにする。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧アクチュエータ2と、統合コントローラ9と、を備え、統合コントローラ9は、停車時モータオフ制御部(ステップS9)と、昇圧勾配制限部(ステップS15〜ステップS20)と、を有する。停車時モータオフ制御部は、ブレーキ操作により車両が停止するとき、VDCモータ21を停止し、車両停止中、VDCモータ21の停止状態を維持したままとする。昇圧勾配制限部は、停車時モータオフ制御を終了すると、ホイールシリンダ圧の昇圧勾配を制限により緩勾配にすると共に、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配より緩やかにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ポンプモータと差圧弁を有するブレーキ液圧アクチュエータを備えた車両のブレーキ制御装置に関する。
【背景技術】
【0002】
従来の車両用ブレーキ装置としては、ブレーキペダルストロークやマスターシリンダ圧等によりドライバ入力量を検知し、ドライバ入力量とドライバ要求減速度特性マップを用いてドライバ要求減速度を算出する。そして、算出したドライバ要求減速度を達成すべく、マスターシリンダからの負圧ブースタ出力(基本液圧分)に対し、フィードフォワード制御にて上乗せ制動分を発生させるものが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−96218号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の車両用ブレーキ装置にあっては、上乗せ制動分を、マスターシリンダとホイールシリンダの間に介装したブレーキ液圧アクチュエータにおいて、差圧弁コントロールとポンプアップ昇圧により得るようにしている。つまり、マスターシリンダ圧より高いホイールシリンダ圧をポンプアップ昇圧により発生し、ホイールシリンダ圧とマスターシリンダ圧の差圧により上乗せ制動分を得るようにしている。
【0005】
このため、制動時は、常時、ブレーキ液圧アクチュエータのポンプアップ昇圧を行うポンプモータを作動させる必要がある。そこで、ポンプモータの耐久性を確保するため、車両停止時は制動中であってもポンプモータを止め、ホイールシリンダ圧を保持するように制御した場合、ブレーキペダルリリースしながら徐々に車速が発生するタイミングでのブレーキペダル維持時や再踏み込み時、ブレーキ液圧アクチュエータが作動することで、ペダルフィール違和感や減速度違和感が発生する、という問題があった。
【0006】
本発明は、上記問題に着目してなされたもので、車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成することができる車両のブレーキ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の車両のブレーキ制御装置は、マスターシリンダと、ホイールシリンダと、をブレーキ液圧アクチュエータと、停車時モータオフ制御部と、昇圧勾配制限部と、備える手段とした。
前記マスターシリンダは、ブレーキ操作に応じたマスターシリンダ圧を発生する。
前記ホイールシリンダは、前後輪の各輪に設けられ、ホイールシリンダ圧に応じて各輪に液圧制動力を与える。
前記ブレーキ液圧アクチュエータは、前記マスターシリンダと前記ホイールシリンダとの間に介装され、ポンプモータにより駆動する液圧ポンプと、ホイールシリンダ圧とマスターシリンダ圧の差圧を制御する差圧弁と、を有する。
前記停車時モータオフ制御部は、ブレーキ操作により車両が停止するとき、前記ポンプモータを停止し、車両停止中、前記ポンプモータの停止状態を維持したままとする。
前記昇圧勾配制限部は、車両停止状態からの車速発生により前記停車時モータオフ制御が終了すると、前記ポンプモータの作動再開に伴うホイールシリンダ圧の昇圧勾配を制限により緩勾配にすると共に、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配より緩やかにする。
【発明の効果】
【0008】
したがって、ブレーキ操作による車両停止時、停車時モータオフ制御中にブレーキ踏み増し操作が行われた場合、差圧弁による差圧を減らし、ホイールシリンダ圧を維持したままでマスターシリンダ圧が上昇する。その後、ブレーキ踏み戻し操作が行われると、マスターシリンダ圧の低下に伴いホイールシリンダ圧が低下する。そして、ホイールシリンダ圧の低下により車速が発生すると、停車時モータオフ制御が終了する。
停車時モータオフ制御が終了した時点でホイールシリンダ圧による実減速度が目標減速度より小さいときには、低下しているホイールシリンダ圧を、差圧弁コントロールとポンプアップ昇圧により上昇させる昇圧指令が出力される。
この昇圧指令に対し、昇圧勾配制限部において、昇圧勾配が制限されて緩勾配によりホイールシリンダ圧を上昇させるため、車速発生時、急な減速度の発生や急減するペダル反力の発生が抑えられる。
さらに、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配が、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配より緩やかにされる。すなわち、マスターシリンダ圧の発生がないときは、リリーフポートが開いていてマスターシリンダ圧が変動せず、マスターシリンダ圧の発生があるときは、リリーフポートが閉じていてマスターシリンダ圧が変動し、ブレーキペダル反力が低下する。このため、昇圧前におけるマスターシリンダ圧の発生有無により、ペダルフィールを優先する昇圧勾配制御と、ドライバの減速度要求を優先する昇圧勾配制御とに切り分けられる。
この結果、停車時モータオフ制御により車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成することができる。加えて、昇圧前にマスターシリンダ圧の発生があるとき、ペダルフィール違和感や減速度違和感を抑えることができ、昇圧前にマスターシリンダ圧の発生がないとき、ドライバの減速度要求に応えることができる。
【図面の簡単な説明】
【0009】
【図1】実施例1のブレーキ制御装置を適用した前輪駆動によるハイブリッド車の構成を示すブレーキシステム図である。
【図2】実施例1のブレーキ制御装置におけるVDCブレーキ液圧アクチュエータを示すブレーキ液圧回路図である。
【図3】実施例1のブレーキ制御装置における回生協調ブレーキ制御系を示す制御ブロック図である。
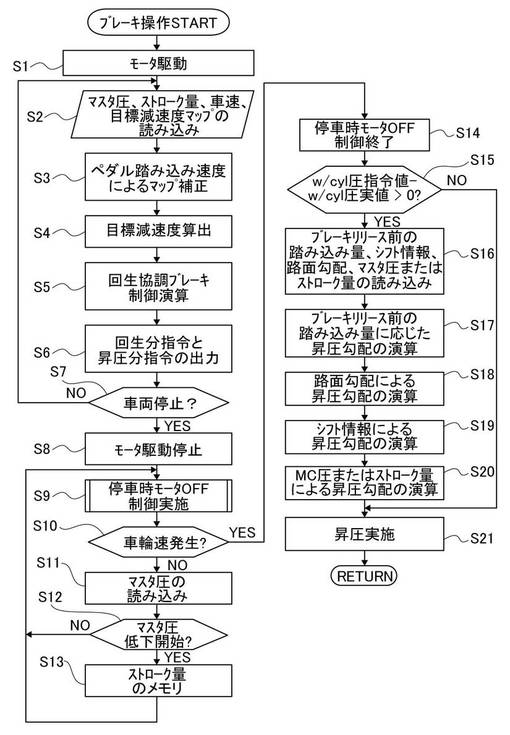
【図4】実施例1のブレーキ制御装置における統合コントローラで実行される回生協調ブレーキ制御処理の流れを示すフローチャートである。
【図5】実施例1のブレーキ制御装置における統合コントローラで実行される回生協調ブレーキ制御処理において車速発生時の昇圧特性の昇圧勾配をマスターシリンダ圧またはストローク量に基づいて制限する一例を示す昇圧特性図である。
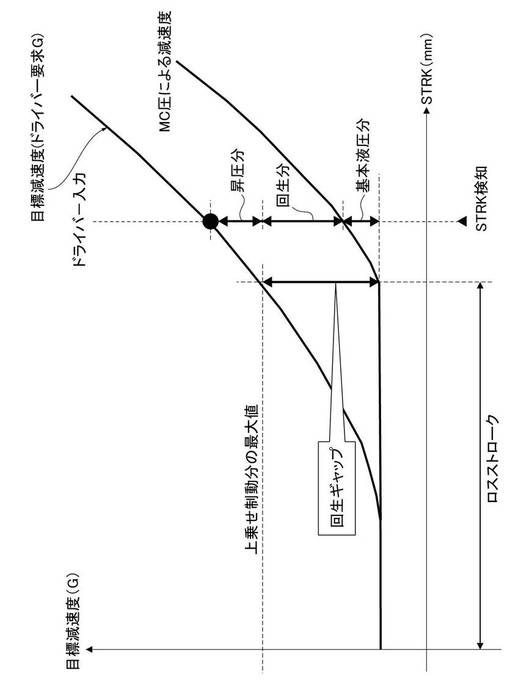
【図6】VDCを利用した回生協調ブレーキシステムにより目標減速度(=ドライバ要求減速度)を基本液圧分と回生分と昇圧分の総和により達成する回生協調ブレーキ制御でのドライバ入力に対する減速度分担関係の一例を示す制御概念説明図である。
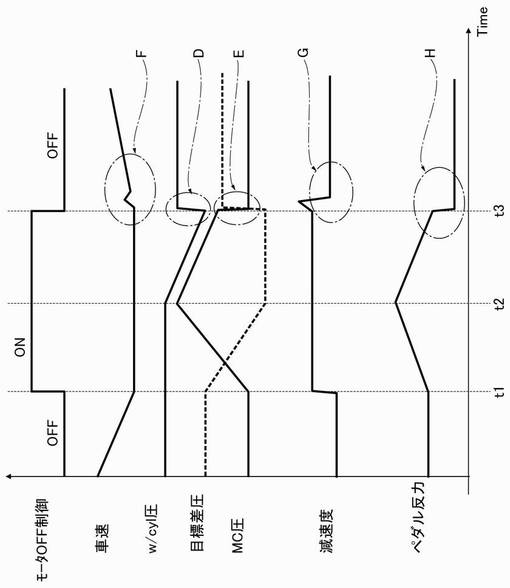
【図7】比較例のブレーキ制御装置において車速発生時のうち停車時モータOFF制御中にペダル踏み増し操作が行われたときの課題をモータOFF制御・車速・ホイールシリンダ圧・目標差圧・マスターシリンダ圧・減速度・ペダル反力の各特性により示すタイムチャートである。
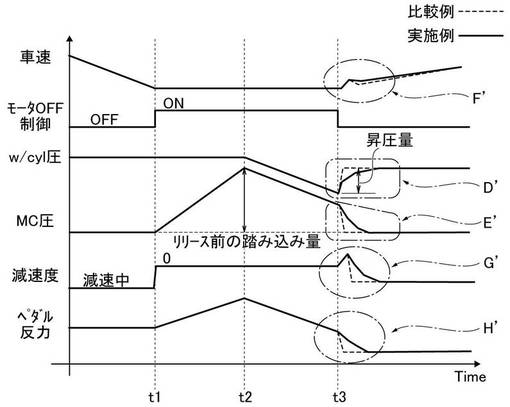
【図8】実施例1のブレーキ制御装置において車速発生時の昇圧勾配制限効果1を車速・モータOFF制御・ホイールシリンダ圧・目標差圧・マスターシリンダ圧・減速度・ペダル反力の各特性により示すタイムチャートである。
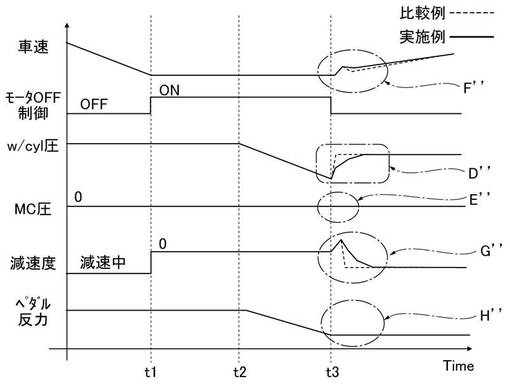
【図9】実施例1のブレーキ制御装置において車速発生時の昇圧勾配制限効果2を車速・モータOFF制御・ホイールシリンダ圧・目標差圧・マスターシリンダ圧・減速度・ペダル反力の各特性により示すタイムチャートである。
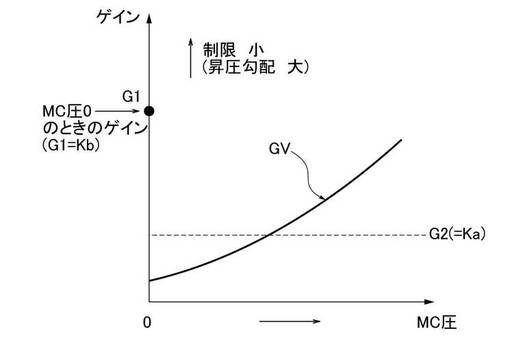
【図10】実施例2のブレーキ制御装置における統合コントローラで実行される回生協調ブレーキ制御処理において車速発生時の昇圧特性のゲイン(=昇圧勾配)をマスターシリンダ圧の高さに応じて制限する一例を示すゲイン特性図である。
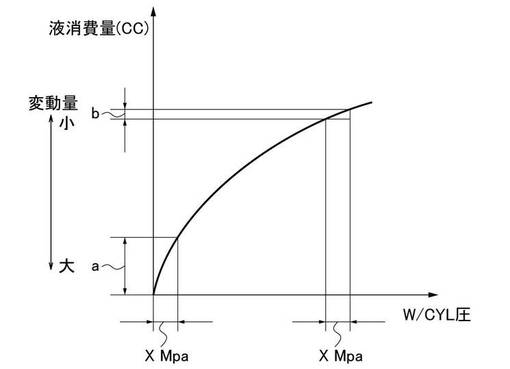
【図11】実施例2においてホイールシリンダ圧を低圧側と高圧側とで同じ幅で変動させたときの液消費量の大きさの違いを説明するためのホイールシリンダ圧と液消費量の関係を示す特性図である。
【発明を実施するための形態】
【0010】
以下、本発明の車両のブレーキ制御装置を実現する最良の形態を、図面に示す実施例1及び実施例2に基づいて説明する。
【実施例1】
【0011】
まず、構成を説明する。
実施例1の車両のブレーキ制御装置の構成を、「全体構成」、「回生協調ブレーキ制御のブロック構成」、「回生協調ブレーキ制御の処理構成」に分けて説明する。
【0012】
[全体構成]
図1は、実施例1のブレーキ制御装置を適用した前輪駆動による電動車両の一例であるハイブリッド車の構成を示し、図2は、ブレーキ液圧アクチュエータの一例であるVDCブレーキ液圧アクチュエータを示す。以下、図1及び図2に基づき、VDCを利用した回生協調ブレーキシステムの全体構成を説明する。
【0013】
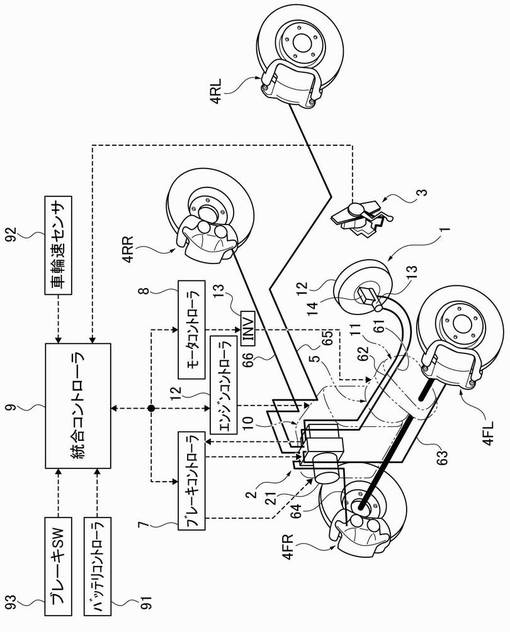
実施例1のブレーキ制御装置のブレーキ減速度発生系は、図1に示すように、ブレーキ液圧発生装置1と、VDCブレーキ液圧アクチュエータ2(ブレーキ液圧アクチュエータ)と、ストロークセンサ3と、左前輪ホイールシリンダ4FLと、右前輪ホイールシリンダ4FRと、左後輪ホイールシリンダ4RLと、右後輪ホイールシリンダ4RRと、走行用電動モータ5と、を備えている。
【0014】
すなわち、既存のVDCシステム(VDCは、「Vehicle Dynamics Control」の略)を利用した回生協調ブレーキシステムによる構成としている。VDCシステムとは、高速でのコーナー進入や急激なハンドル操作などによって車両姿勢が乱れた際、横滑りを防ぎ、優れた走行安定性を発揮する車両挙動制御(=VDC制御)を行うシステムである。VDC制御では、例えば、旋回挙動がオーバーステア側であると感知すると、コーナー外側の前輪にブレーキをかけ、逆に、旋回挙動がアンダーステア側であると感知すると、駆動パワーを落とすとともに後輪のコーナー内側のタイヤにブレーキをかける。
【0015】
前記ブレーキ液圧発生装置1は、ドライバによるブレーキ操作に応じた基本液圧分を発生する基本液圧発生手段である。このブレーキ液圧発生装置1は、図1及び図2に示すように、ブレーキペダル11と、負圧ブースタ12と、マスターシリンダ13と、リザーバ14と、を有する。つまり、ブレーキペダル11に加えられたドライバのブレーキ踏力を、負圧ブースタ12により倍力し、マスターシリンダ13においてマスターシリンダ圧(プライマリ液圧、セカンダリ液圧)を作り出す。このとき、マスターシリンダ圧で発生する減速度が、目標減速度(=ドライバ要求減速度)より小さくなるように予め設計する。
【0016】
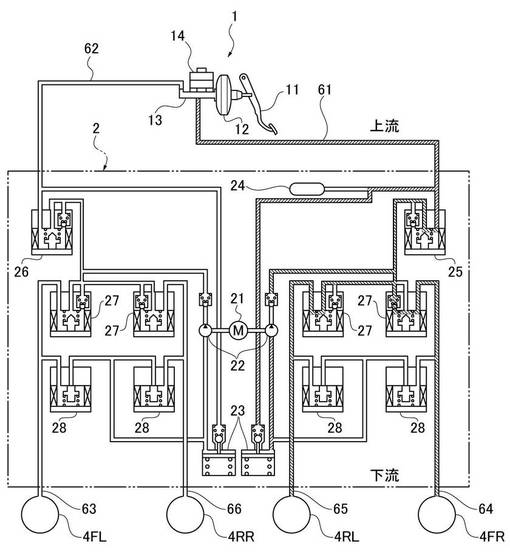
前記VDCブレーキ液圧アクチュエータ2は、ブレーキ液圧発生装置1と各輪のホイールシリンダ4FL,4FR,4RL,4RRとの間に介装され、マスターシリンダ圧の増圧・保持・減圧を制御する。このVDCブレーキ液圧アクチュエータ2とブレーキ液圧発生装置1とは、プライマリ液圧管61とセカンダリ液圧管62により接続されている。VDCブレーキ液圧アクチュエータ2と各輪のホイールシリンダ4FL,4FR,4RL,4RRとは、左前輪液圧管63と右前輪液圧管64と左後輪液圧管65と右後輪液圧管66により接続されている。つまり、ブレーキ操作時には、ブレーキ液圧発生装置1により発生したマスターシリンダ圧を、VDCブレーキ液圧アクチュエータ2により制御し、各輪のホイールシリンダ4FL,4FR,4RL,4RRに加えることで液圧制動力を得るようにしている。
【0017】
前記VDCブレーキ液圧アクチュエータ2の具体的構成は、図2に示すように、VDCモータ21と、VDCモータ21(ポンプモータ)により駆動する液圧ポンプ22,22と、リザーバ23,23と、マスターシリンダ圧センサ24と、を有する。ソレノイドバルブ類として、第1M/Cカットソレノイドバルブ25(差圧弁)と、第2M/Cカットソレノイドバルブ26(差圧弁)と、保持ソレノイドバルブ27,27,27,27と、減圧ソレノイドバルブ28,28,28,28と、を有する。第1M/Cカットソレノイドバルブ25と第2M/Cカットソレノイドバルブ26は、ホイールシリンダ圧(下流圧)とマスターシリンダ圧(上流圧)の差圧を制御する。
【0018】
前記ストロークセンサ3は、ドライバによるブレーキペダル操作量をポテンショメータ等により検出する手段である。このストロークセンサ3は、回生協調ブレーキ制御での必要情報である目標減速度(=ドライバ要求減速度)を検出する構成として、既存のVDCシステムに対して追加された部品である。
【0019】
前記各ホイールシリンダ4FL,4FR,4RL,4RRは、前後各輪のブレーキディスクに設定され、VDCブレーキ液圧アクチュエータ2からの液圧が印加される。そして、各ホイールシリンダ4FL,4FR,4RL,4RRへの液圧印加時、ブレーキパットによりブレーキディスクを挟圧することにより、前後輪に液圧制動力を付与する。
【0020】
前記走行用電動モータ5は、左右前輪(駆動輪)の走行用駆動源として設けられ、駆動モータ機能と発電ジェネレータ機能を持つ。この走行用電動モータ5は、力行時、バッテリ電力を消費しながらのモータ駆動により、左右前輪へ駆動力を伝達する。そして、回生時、左右前輪の回転駆動に負荷を与えることで電気エネルギーに変換し、発電分をバッテリへ充電する。つまり、左右前輪の回転駆動に与える負荷が、回生制動力となる。この走行用電動モータ5が設けられる左右前輪(駆動輪)の駆動系には、走行用電動モータ5以外に、走行用駆動源としてエンジン10が設けられ、変速機11を介して左右前輪へ駆動力を伝達する。
【0021】
実施例1のブレーキ制御装置のブレーキ減速度制御系は、図1に示すように、ブレーキコントローラ7と、モータコントローラ8と、統合コントローラ9と、エンジンコントローラ12と、を備えている。
【0022】
前記ブレーキコントローラ7は、統合コントローラ9からの指令とVDCブレーキ液圧アクチュエータ2のマスターシリンダ圧センサ24からの圧力情報を入力する。そして、所定の制御則にしたがって、VDCブレーキ液圧アクチュエータ2のVDCモータ21とソレノイドバルブ類25,26,27,28に対し駆動指令を出力する。このブレーキコントローラ7では、回生協調ブレーキ制御時、統合コントローラ9から昇圧分指令を入力すると、ホイールシリンダ圧(下流圧)とマスターシリンダ圧(上流圧)の差圧を制御する。差圧制御は、目標差圧に対する第1M/Cカットソレノイドバルブ25と第2M/Cカットソレノイドバルブ26への作動電流値による差圧コントロールにより行われる。ここで、差圧制御は、VDCモータ21の作動時、VDCモータ21によるポンプアップ昇圧と併用して行われ、VDCモータ21の停止時、差圧コントロールのみにより行われる。なお、ブレーキコントローラ7では、回生協調ブレーキ制御以外に、上記VDC制御やTCS制御やABS制御、等を行う。
【0023】
前記モータコントローラ8は、駆動輪である左右前輪に連結された走行用電動モータ5にインバータ13を介して接続される。そして、回生協調ブレーキ制御時、統合コントローラ9から回生分指令を入力すると、走行用電動モータ5により発生する回生制動力を入力された回生分指令に応じて制御する回生制動力制御手段である。このモータコントローラ8は、走行時、走行状態や車両状態に応じて走行用電動モータ5により発生するモータトルクやモータ回転数を制御する機能も併せ持つ。
【0024】
前記統合コントローラ9は、ブレーキ操作時、目標減速度を、マスターシリンダ圧による基本液圧分と上乗せ制動分(回生制動力による回生分と、VDCブレーキ液圧アクチュエータ2による昇圧分と、の少なくとも一方)の総和で達成する回生協調ブレーキ制御を行う。このとき、目標減速度は、ストロークセンサ3からのペダルストロークセンサ値と、設定されている目標減速度特性マップと、に基づいて決める。この統合コントローラ9には、バッテリコントローラ91からのバッテリ充電容量情報、車輪速センサ92からの車輪速情報、ブレーキスイッチ93からのブレーキ操作情報、ストロークセンサ3からのブレーキペダルストローク情報、マスターシリンダ圧センサ24からのマスターシリンダ圧情報、等が入力される。
【0025】
[回生協調ブレーキ制御のブロック構成]
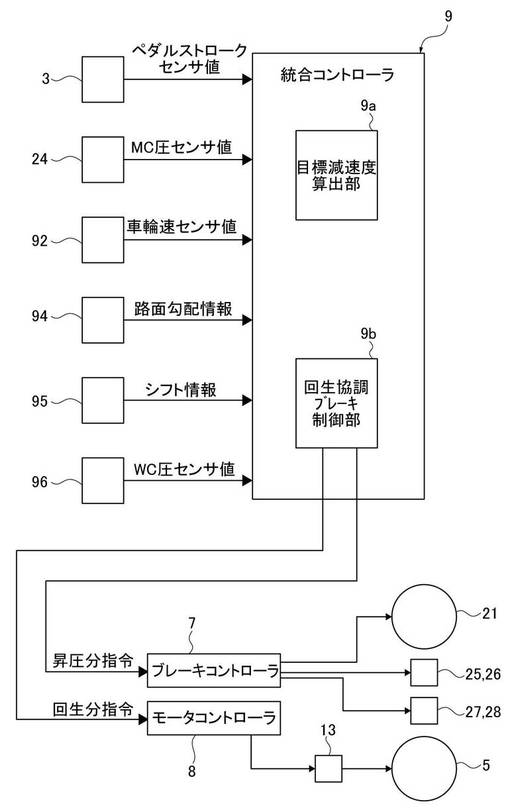
図3は、実施例1のブレーキ制御装置における回生協調ブレーキ制御系を示す。以下、図3に基づいて、回生協調ブレーキ制御のブロック構成を説明する。
実施例1の回生協調ブレーキ制御系は、図3に示すように、ブレーキコントローラ7と、モータコントローラ8と、統合コントローラ9と、を備えている。
【0026】
前記ブレーキコントローラ7は、統合コントローラ9から昇圧分指令を入力し、VDCブレーキ液圧アクチュエータ2のVDCモータ21と両カットソレノイドバルブ25,26と、各ソレノイドバルブ27,28に対し駆動指令を出力する。
【0027】
前記モータコントローラ8は、統合コントローラ9から回生分指令を入力し、走行用電動モータ5を制御するインバータ13に回生指令を出力する。
【0028】
前記統合コントローラ9は、ストロークセンサ3からのペダルストロークセンサ値、マスターシリンダ圧センサ24からのMC圧センサ値と、車輪速センサ92からの車輪速センサ値と、を入力する。加えて、路面勾配センサ94からの路面勾配情報と、シフト位置センサ95から選択されているレンジ位置(Dレンジ、Nレンジ、Rレンジ、等)を示すシフト情報と、ホイールシリンダ圧センサ96からのWC圧センサ値と、を入力する。そして、これらの情報に基づく演算処理部として、目標減速度算出部9aと、回生協調ブレーキ制御部9bと、を有する。
【0029】
前記目標減速度算出部9aは、目標減速度特性マップによる目標減速度特性と、ストロークセンサ3からのペダルストロークセンサ値と、に基づき、目標減速度(=ドライバ要求減速度)を算出する。
【0030】
前記回生協調ブレーキ制御部9bは、目標減速度算出部9aにて算出された目標減速度と、マスターシリンダ圧センサ24からのMC圧センサ値と、車輪速センサ92からの車輪速センサ値を入力する。そして、MC圧センサ値に基づいて基本液圧分を決め、車輪速センサ値に基づいて回生分を決め、可能な限り目標減速度を基本液圧分+回生分の総和で達成するようにし、不足が生じたときその不足分を昇圧分により補償する回生協調ブレーキ制御演算を行う。この演算結果にしたがって、回生分に対応する回生分指令をモータコントローラ8に出力し、昇圧分に対応する昇圧分指令をブレーキコントローラ7に出力する。
【0031】
[回生協調ブレーキ制御の処理構成]
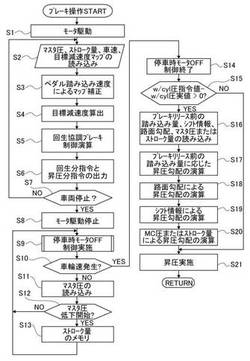
図4は、実施例1のブレーキ制御装置における統合コントローラ8で実行される回生協調ブレーキ制御処理の流れを示すフローチャートである。以下、図4に基づいて、回生協調ブレーキ制御の処理構成をあらわす各ステップを説明する。なお、この回生協調ブレーキ制御処理は、ブレーキ操作開始が判断された時点からスタートし、ブレーキ操作解除により終了する。
【0032】
ステップS1では、ブレーキ操作開始前において停止状態のVDCモータ21をモータ駆動状態にし、ステップS2へ進む。
【0033】
ステップS2では、ステップS1でのモータ駆動、あるいは、ステップS7での車両非停止状態であるとの判断に続き、マスターシリンダ圧センサ24からのマスターシリンダ圧情報と、ストロークセンサ3からのペダルストローク量情報と、車輪速センサ92からの車輪速情報と、目標減速度特性マップと、を読み込み、ステップS3へ進む。
【0034】
ステップS3では、ステップS2での必要情報と目標減速度特性マップを読み込みに続き、ブレーキペダル踏み込み速度を算出し、ペダル踏み込み速度による目標減速度特性マップの補正を行い、ステップS4へ進む。
ここで、目標減速度特性マップの補正は、例えば、算出されたブレーキペダル踏み込み速度が、ペダル踏み込み速度情報より速くなっているほど、実マスターシリンダ圧発生開始ポイントまでのロスストロークを短くするようにストローク方向にずらすオフセット補正を施す。なお、目標減速度特性マップが有するペダル踏み込み速度情報と算出されたペダル踏み込み速度が一致するとき、または、両速度差が許容範囲内であるときは、設定されている目標減速度特性マップの補正を要さない。
【0035】
ステップS4では、ステップS3でのペダル踏み込み速度による目標減速度特性マップの補正に続き、ブレーキペダルストロークセンサ値と、補正後の目標減速度特性マップに基づき、ドライバ入力によるブレーキペダルストローク位置に対応する目標減速度を算出し、ステップS5へ進む。
【0036】
ステップS5では、ステップS4での目標減速度の算出に続き、そのときのMC圧センサ値に基づいて基本液圧分を決め、そのときの車輪速センサ値やバッテリSOCに基づいて可能な限り最大となる回生分を決める。そして、目標減速度から基本液圧分と回生分を差し引いた残りの減速度分を昇圧分により分担するように決める。つまり、目標減速度を基本液圧分+回生分+昇圧分の総和で達成する回生協調ブレーキ制御演算を行い、ステップS6へ進む。
【0037】
ステップS6では、ステップS5での回生協調ブレーキ制御演算に続き、基本液圧分に対する上乗せ目標制動力のうち、回生分に対応する回生分指令値を決定し、回生分指令(ゼロ指令を含む)をモータコントローラ8に出力する。同時に、基本液圧分に対する上乗せ目標制動力のうち、昇圧分に対応する昇圧分指令値を決定し、昇圧分指令(ゼロ指令を含む)をブレーキコントローラ7に出力し、ステップS7へ進む。
ここで、モータコントローラ8は、回生分指令を入力すると、回生分を目標回生制動力とし、走行用電動モータ5への回生電流値を決めるフィードフォワード制御により、回生トルク制御を行う。ブレーキコントローラ7は、昇圧分指令を入力すると、昇圧分を目標差圧とし、両M/Cカットソレノイドバルブ25,26への作動電流値を決めるフィードフォワード制御により、差圧コントロールを行う。
【0038】
ステップS7では、ステップS6での回生分指令と昇圧分指令の出力に続き、車輪速センサ92からの車輪速センサ値に基づき、車両が停止したか否かを判断する。YES(車両停止状態)の場合はステップS8へ進み、NO(車両非停止状態)の場合はステップS2へ戻る。
【0039】
ステップS8では、ステップS7での車両停止状態であるとの判断に続き、VDCモータ21のモータ駆動を停止し、ステップS9へ進む。
【0040】
ステップS9では、ステップS8でのモータ駆動停止、あるいは、ステップS12でのマスターシリンダ圧の低下開始でないとの判断、あるいは、ステップS13でのストローク量もメモリに続き、停車時モータOFF制御を実施し、ステップS10へ進む。
【0041】
ステップS10では、ステップS9での停車時モータOFF制御の実施に続き、車輪速センサ92からの車輪速センサ値に基づき、車輪速が発生したか否かを判断する。YES(車輪速発生)の場合にはステップS14へ進み、NO(車輪速非発生)の場合にはステップS11へ進む。
【0042】
ステップS11では、ステップS10での車輪速非発生(停車中)であるとの判断に続き、マスターシリンダ圧センサ24からのマスターシリンダ圧情報を読み込み、ステップS12へ進む。
【0043】
ステップS12では、ステップS11でのマスターシリンダ圧の読み込みに続き、マスターシリンダ圧が低下を開始したか否かを判断する。YES(マスターシリンダ圧の低下開始)の場合はステップS13へ進み、NO(マスターシリンダ圧が維持または上昇)の場合はステップS9へ進む。
【0044】
ステップS13では、ステップS12でのマスターシリンダ圧の低下開始判断に続き、そのときのストロークセンサ3からのペダルストローク量情報を読み込み、読み込んだストローク量をブレーキリリース前の踏み込み量として記憶し、ステップS9へ進む。
【0045】
ステップS14では、ステップS10での車輪速発生(=車速発生)であるとの判断に続き、停車中に継続していた停車時モータOFF制御を終了し、ステップS15へ進む。
【0046】
ステップS15では、ステップS14での停車時モータOFF制御の終了に続き、ブレーキコントローラ7からVDCブレーキ液圧アクチュエータ2へ出力されるホイールシリンダ圧指令値と、ホイールシリンダ圧センサ96からのWC圧センサ値に基づくホイールシリンダ圧実値と、の差がゼロを超えているか否かを判断する。YES(w/cyl圧指令値>w/cyl圧実値)の場合はステップS16へ進み、NO(w/cyl圧指令値≦w/cyl圧実値)の場合はステップS21へ進む。
ここで、ホイールシリンダ圧指令値は、ペダルストロークに基づいて出力される指令値であり、目標減速度に相当する。一方、ホイールシリンダ圧実値は、車両の減速度を発生する制動液圧センサ値であり、実減速度に相当する。
【0047】
ステップS16では、ステップS15でのw/cyl圧指令値>w/cyl圧実値であるとの判断に続き、ステップS13にて記憶されているブレーキリリース前の踏み込み量と、シフト位置センサ95からのシフト情報と、路面勾配センサ94からの路面勾配と、マスターシリンダ圧センサ24からのマスターシリンダ圧情報またはストロークセンサ3からのペダルストローク量情報と、を読み込み、ステップS17へ進む。
【0048】
ステップS17では、ステップS16でのブレーキリリース前の踏み込み量とシフト情報と路面勾配とマスタ圧またはストローク量の読み込みに続き、ブレーキリリース前の踏み込み量に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配を演算し、ステップS18へ進む。
ここで、ブレーキリリース前の踏み込み量に基づく昇圧勾配は、何ら制限することのない昇圧勾配(図5の昇圧特性C)に対して制限した勾配とするが、制限度合いを下記のように変更演算する。
ブレーキリリース前の踏み込み量が大きいほど車速発生時の昇圧量が大きくなることで、ペダルフィールを優先し、ブレーキリリース前の踏み込み量に基づく昇圧勾配を緩勾配とする(勾配制限大きい)。
一方、ブレーキリリース前の踏み込み量が小さいほど車速発生時の昇圧量が小さくなることで、ドライバの減速要求を優先し、ブレーキリリース前の踏み込み量に基づく昇圧勾配を急勾配とする(勾配制限小さい)。
【0049】
ステップS18では、ステップS17でのブレーキリリース前の踏み込み量に基づく昇圧勾配の演算に続き、路面勾配に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配を演算し、ステップS19へ進む。
ここで、路面勾配に基づく昇圧勾配は、何ら制限することのない昇圧勾配(図5の昇圧特性C)に対して制限した勾配とするが、制限度合いを下記のように変更演算する。
路面勾配が登坂勾配や降坂勾配であり大きな勾配を示すほど、ドライバの制動要求が早急であると判断し、昇圧特性を急勾配とする(勾配制限小さい)。
一方、路面勾配が平坦路に近いほど、ドライバの制動要求が早急でないと判断し、ペダルフィールを優先し、昇圧勾配を緩勾配とする(勾配制限大きい)。
この路面勾配に基づく昇圧勾配演算では、例えば、ブレーキリリース前の踏み込み量に基づく昇圧勾配を、急勾配側や緩勾配側に補正することで行う。
【0050】
ステップS19では、ステップS18での路面勾配に基づく昇圧勾配の演算に続き、シフト情報に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配を演算し、ステップS20へ進む。
ここで、シフト情報に基づく昇圧勾配は、何ら制限することのない昇圧勾配(図5の昇圧特性C)に対して制限した勾配とするが、制限度合いを下記のように変更演算する。
Dレンジでの登坂時には、ドライバの制動要求が早急でないと判断し、緩勾配とする(勾配制限大きい)。一方、NレンジやRレンジでの登坂時には、Dレンジよりも早急性が高いと判断し、急勾配とする(勾配制限小さい)。
Rレンジでの降坂時には、ドライバの制動要求が早急でないと判断し、緩勾配とする(勾配制限大きい)。一方、NレンジやDレンジでの降坂時には、Rレンジよりも早急性が高いと判断し、急勾配とする(勾配制限小さい)。
このシフト情報に基づく昇圧勾配演算では、例えば、ステップS18にて路面勾配に基づき急勾配側や緩勾配側に補正された昇圧勾配を、さらに、シフト情報に基づき急勾配側や緩勾配側に補正することで行う。
【0051】
ステップS20では、ステップS19でのステップS19でのシフト情報に基づく昇圧勾配の演算に続き、マスターシリンダ圧情報(マスターシリンダ圧またはストローク量)に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配を演算し、ステップS21へ進む。
ここで、マスターシリンダ圧情報としては、マスターシリンダ圧センサ24から直接取得するようにしても良いし、ストロークセンサ3からのペダルストローク量情報を代用するようにしても良い。なお、ストローク量情報で代用する場合は、ロスストローク以下のストローク量であるとき、マスターシリンダ圧を発生しないストローク領域とし、ロスストロークを超えるストローク量であるとき、マスターシリンダ圧を発生するストローク領域とする。
そして、マスターシリンダ圧情報に基づく昇圧勾配は、何ら制限することのない昇圧勾配(図5の昇圧特性C)に対して制限した勾配とするが、制限度合いを下記のように変更演算する。
昇圧前にマスターシリンダ圧の発生がある場合には、車速発生による昇圧時にマスターシリンダ圧が変動し、ペダル反力も変動する。このため、ペダルフィールを優先し、例えば、図5の昇圧特性Aに示すように、昇圧前のマスターシリンダ圧に基づく昇圧勾配Kaを緩勾配とする(勾配制限大きい)。
一方、昇圧前にマスターシリンダ圧の発生がない場合には、車速発生による昇圧時時にマスターシリンダ圧の変動がなく、ペダル反力も変動しない。このため、ドライバの減速要求を優先し、例えば、図5の昇圧特性Bに示すように、昇圧前のマスターシリンダ圧に基づく昇圧勾配Kbを急勾配とする(勾配制限小さい)。
【0052】
ステップS21では、ステップS20でのマスターシリンダ圧情報に基づく昇圧勾配の演算、あるいは、ステップS15でのw/cyl圧指令値≦w/cyl圧実値であるとの判断に続き、ホイールシリンダ圧の昇圧を実施し、リターンへ進む。
ここで、ホイールシリンダ圧の昇圧は、w/cyl圧指令値>w/cyl圧実値のとき、演算により制限された昇圧勾配に追従させて実施する。
【0053】
次に、作用を説明する。
実施例1のハイブリッド車のブレーキ制御装置における作用を、「回生協調ブレーキ制御作用」、「停車時モータOFF制御作用」、「停車時モータOFF制御終了時の課題」、「停車時モータOFF制御終了時の昇圧勾配抑制作用」に分けて説明する。
【0054】
[回生協調ブレーキ制御作用]
ハイブリッド車の場合、制動時においてエンジン車のように制動エネルギーを熱エネルギーとして全て消費するのではなく、制動エネルギーのうちできる限り多くのエネルギーを回生エネルギーとしてバッテリ回収することが燃費向上を図る上で必要である。以下、これを反映する回生協調ブレーキ制御作用を説明する。
【0055】
既存のコンベンショナルVDCの場合、ブレーキ操作時に負圧ブースタによる基本液圧分でドライバ要求の目標減速度を得るようにしている。これに対し、ブレーキ操作時に負圧ブースタによる基本液圧分を、目標減速度に達しないように、ドライバ要求の目標減速度からオフセットし、目標減速度の回生ギャップを設定する。このように、最大回生トルクによる回生ギャップを設定することによって、目標減速度の回生ギャップ分が、ドライバ要求の目標減速度に対して不足することになる。よって、最大回生トルク発生時には、ドライバ要求の目標減速度を、負圧ブースタ(基本液圧分)と回生ブレーキ(回生分)により達成し、回生機能を最大限に発揮するようにしている。
【0056】
しかし、例えば、車輪速条件やバッテリ充電容量条件等により、ドライバ要求の目標減速度に対し、基本液圧分で不足する目標減速度を回生分だけで補償しようとしても、補償することができない場合がある。そこで、ドライバ要求の目標減速度を、図6に示すように、負圧ブースタ(基本液圧分)と回生ブレーキ(回生分)の総和により達成するようにし、不足分をVDCブレーキ液圧アクチュエータ(昇圧分)により補償するようにしたのがVDCを利用した回生協調ブレーキシステムである。
【0057】
したがって、既存のコンベンショナルVDCに対し、負圧ブースタの特性変更と、VDCブレーキ液圧アクチュエータの特性変更と、ストロークセンサの追加を行うだけで、VDCを利用した廉価な回生協調ブレーキシステムを構成することができる。
すなわち、VDCを利用した回生協調ブレーキ制御システムは、目標減速度に対し、基本液圧分と回生分だけでは補償しきれないシーンが発生すると、VDCブレーキ液圧アクチュエータ2によって補償しきれない分の液圧を昇圧し、ドライバの要求減速度を達成する制御システムである。言い換えると、コンベンショナルVDCの安全機能を拡張(安全機能+回生協調機能)した制御システムである。
【0058】
この回生協調ブレーキ制御システムを搭載したハイブリッド車での走行中にブレーキ操作すると、図4のフローチャートにおいて、ステップS1→ステップS2→ステップS3→ステップS4→ステップS5→ステップS6→ステップS7へと進む。そして、ステップS7にて車両非停止状態であると判断されている間は、ステップS2→ステップS3→ステップS4→ステップS5→ステップS6→ステップS7へと進む流れが繰り返され、回生協調ブレーキ制御を実行する。そして、ステップS7にて車両停止状態であると判断されると、ステップS7からステップS8へと進み、回生協調ブレーキ制御を終了する。
【0059】
すなわち、ステップS4では、ブレーキペダルストロークセンサ値と、設定あるいは補正された目標減速度特性マップに基づき、ドライバ入力によるブレーキペダルストローク位置に対応する目標減速度が算出される。ステップS5では、そのときのMC圧センサ値に基づいて基本液圧分が決められ、そのときの車輪速センサ値やバッテリSOCに基づいて可能な限り最大となる回生分が決められる。そして、目標減速度から基本液圧分と回生分を差し引いた残りの減速度分を昇圧分により分担するように決められる。ステップS6では、基本液圧分に対する上乗せ目標制動力のうち、回生分に対応する回生分指令値が決定され、回生分指令(ゼロ指令を含む)がモータコントローラ8に出力される。同時に、基本液圧分に対する上乗せ目標制動力のうち、昇圧分に対応する昇圧分指令値が決定され、昇圧分指令(ゼロ指令を含む)がブレーキコントローラ7に出力される。
【0060】
したがって、回生協調ブレーキ制御時には、回生分指令を入力するモータコントローラ8において、回生分を目標回生制動力とし、走行用電動モータ5への回生電流値を決めるフィードフォワード制御により、回生トルク制御が行われる。そして、昇圧分指令を入力するブレーキコントローラ7において、昇圧分を目標差圧とし、VDCモータ21への回転上昇指令と、両M/Cカットソレノイドバルブ25,26への作動電流値を決めるフィードフォワード制御により、差圧コントロールを行う。この結果、制動エネルギーのうち、可能な限り最大となる回生エネルギー分を、車載バッテリに回収することができる。
【0061】
[停車時モータOFF制御作用]
上記回生協調ブレーキ制御では、ブレーキ操作による制動時、ポンプアップ昇圧のために常にVDCモータ21を作動しておく必要があることから、VDCモータ21の耐久性が問題となる。そこで、ブレーキ操作による制動時であっても一定の条件下ではVDCモータ21を停止させ、VDCモータ21の耐久性を確保する必要がある。以下、これを反映する停車時モータOFF制御作用を説明する。
【0062】
停車時モータOFF制御は、図4のステップS7にて車両停止判断されるとVDCモータ21の駆動を停止して開始され、図4のステップS10にて車輪速が発生すると終了する。つまり、車両停止中、VDCモータ21の駆動停止を継続する制御である。
【0063】
停車時モータOFF制御の一例を説明する。車速が0km/hになると、モータ停止フラグがOFFからONに切り替えられ、VDCモータ21のモータ回転数が低下を開始する。そして、VDCモータ21のモータ回転数がゼロ(モータ停止)になり、ブレーキペダルの踏み込み量を保っているとすると、その間は、マスターシリンダ圧に一定のバルブ差圧が加えられたホイールシリンダ圧を維持している。
【0064】
そして、ブレーキペダルの踏み増し操作を開始すると、マスターシリンダ圧は、踏み増し操作に追従して上昇するが、ホイールシリンダ圧は、VDCモータ21の停止によりポンプアップ昇圧できないことで、踏み増し操作開始時のホイールシリンダ圧をそのまま維持する。つまり、踏み増し時には、カットバルブ25,26への指示圧(目標差圧)を落とし、マスターシリンダ圧の上昇に反比例してバルブ差圧を低下させ、上昇するマスターシリンダ圧に低下するバルブ差圧を加えてホイールシリンダ圧を維持する。そして、踏み増し位置でペダル踏み込み量を維持すると、上昇位置で一定のマスターシリンダ圧と低下位置で一定のバルブ差圧を加えてホイールシリンダ圧を維持する。さらに、ブレーキペダルの踏み戻し操作を開始すると、バルブ差圧をそのまま維持することで、マスターシリンダ圧とホイールシリンダ圧は、踏み戻し操作に追従して下降する。したがって、ペダル踏み込み量(マスターシリンダ圧)を維持すると、ホイールシリンダ圧とバルブ差圧が低下する。
【0065】
そして、ブレーキペダルの抜き操作を開始すると、バルブ差圧をそのまま維持することで、マスターシリンダ圧とホイールシリンダ圧は、抜き操作に追従して低下し、抜き位置でペダル踏み込み量を維持すると、低下位置で一定のマスターシリンダ圧と一定のバルブ差圧を加えてホイールシリンダ圧を維持する。さらに、ブレーキペダルの抜き戻し操作を開始すると、マスターシリンダ圧は上昇し、バルブ差圧は低下することで、ホイールシリンダ圧を維持する。したがって、ペダル踏み込み量(マスターシリンダ圧)を維持すると、ホイールシリンダ圧とバルブ差圧が低下する。
【0066】
そして、再度、ブレーキペダルの踏み増し操作を開始すると、マスターシリンダ圧は、踏み増し操作に追従して上昇し、バルブ差圧がゼロまで低下することで、マスターシリンダ圧がホイールシリンダ圧と一致する。つまり、マスターシリンダ圧とホイールシリンダ圧の差圧が無くなり、マスターシリンダ圧の上昇に追従してホイールシリンダ圧が上昇し、それ以降は、マスターシリンダ圧の維持及び低下に追従してホイールシリンダ圧が維持及び低下する。その後、マスターシリンダ圧とホイールシリンダ圧のバルブ差圧の全てがゼロになる。
【0067】
このように、停車時モータOFF制御では、ドライバがブレーキペダルに対して踏み増し方向に操作するときは、マスターシリンダ圧とホイールシリンダ圧の目標差圧を維持しないで、目標差圧を減少させる制御を行う。
なぜなら、第一に、ペダル踏み増し方向に操作するとき、マスターシリンダ圧とホイールシリンダ圧の目標差圧を維持すると、VDCモータ21を作動し、ホイールシリンダ圧をマスターシリンダ圧に追従させてポンプアップ昇圧させる必要がある。第二に、マスターシリンダ圧とホイールシリンダ圧の目標差圧を維持するように、カットバルブ25,26を閉じ状態としてペダル踏み込み操作を行うと、高いペダル反力により、所謂板踏み感になってしまう。
したがって、停車時モータOFF制御中にドライバがブレーキペダルに対して踏み増し方向に操作を行った場合には、マスターシリンダ圧とホイールシリンダ圧の間で、目標差圧のある状態から目標差圧が無くなる状態へと遷移することになる。
【0068】
[停車時モータOFF制御終了時の課題]
上記停車時モータOFF制御中に目標差圧が低い状態とされ、車速発生により停車時モータOFF制御を終了し、差圧コントロールとポンプアップ昇圧によりホイールシリンダ圧を立ち上げる比較例の課題を、図7に基づき説明する。
【0069】
図7において、時刻t1は、車速及び減速度がゼロになり停車時モータOFF制御を開始する時刻とする。時刻t2は、時刻t1からの停車時モータOFF制御中におけるペダル踏み増し操作の終了時刻とする。時刻t3は、時刻t2からのペダル戻し操作(ペダルリリース操作)により車速が発生し、停車時モータOFF制御を終了する時刻とする。
【0070】
時刻t1から時刻t2までの間は、停車時モータOFF制御中におけるペダル踏み増し操作に伴い、マスターシリンダ圧は上昇するが、目標差圧は低下し、一定のホイールシリンダ圧を保つ。なお、時刻t1から時刻t2までの間のペダル反力は、マスターシリンダ圧の上昇に伴い上昇する。
【0071】
一方、時刻t2から時刻t3までの間は、停車時モータOFF制御中におけるペダル戻し操作に伴い、マスターシリンダ圧とホイールシリンダ圧が低下し、目標差圧は低下後の差圧が保たれる。なお、時刻t2から時刻t3までの間のペダル反力は、マスターシリンダ圧の低下に伴い低下する。
【0072】
そして、時刻t3にて車速の発生により停車時モータOFF制御が終了すると、低下している目標差圧を一気に立ち上げる差圧弁コントロールと、ポンプモータの作動再開によるポンプアップ昇圧が行われる。したがって、ポンプモータの作動再開直後、図7の矢印Dに示すように、ホイールシリンダ圧が急勾配にて上昇し、ポンプアップ昇圧作動に伴うブレーキ液の吸込みにより、図7の矢印Eに示すように、マスターシリンダ圧が急勾配にて低下する。
【0073】
このように、ホイールシリンダ圧が急勾配にて上昇するため、図7の矢印Fに示すように、車速が時刻t3から加速から減速へと変動し、図7の矢印Gに示すように、減速度が時刻t3から加速側から減速側へ変動し、ドライバに減速度違和感を与える。
加えて、マスターシリンダ圧が急勾配にて低下するため、図7の矢印Hに示すように、ペダル反力が時刻t3から急低下し、ドライバにペダルフィール違和感を与える。
【0074】
[停車時モータOFF制御終了時の昇圧勾配抑制作用]
上記のように、停車時モータOFF制御中に踏み増し操作を行った場合、車速発生時に減速度違和感やペダルフィール違和感を発生する。このような減速度違和感やペダルフィール違和感を緩和することが必要である。以下、図8及び図9に基づき、これを反映する停車時モータOFF制御終了時の昇圧勾配抑制作用を説明する。
【0075】
まず、停車時モータOFF制御の実施が開始され、マスターシリンダ圧が維持または上昇している間は、図4のフローチャートにおいて、ステップS9→ステップS10→ステップS11→ステップS12へと進む流れが繰り返される。そして、ブレーキペダルを踏み戻し操作することによりマスターシリンダ圧が低下を開始すると、ステップS12からステップS13へ進む。ステップS13では、ストロークセンサ3からのペダルストローク量情報が読み込まれ、読み込まれたストローク量がブレーキリリース前の踏み込み量として記憶される。
【0076】
その後、ステップS10にて車輪速が発生したと判断されると、図4のフローチャートにおいて、ステップS10からステップS14へと進み停車時モータOFF制御を終了し、ステップS14からステップS15へと進む。ステップS15では、ブレーキコントローラ7からVDCブレーキ液圧アクチュエータ2へ出力されるw/cyl圧指令値が、ホイールシリンダ圧センサ96からのWC圧センサ値に基づくw/cyl圧実値を超えているか否かが判断される。w/cyl圧指令値≦w/cyl圧実値の場合は、目標減速度と実減速度が一致している、あるいは、実減速度が目標減速度より大きくホイールシリンダ圧の昇圧を必要としないことからステップS21へ進む。一方、w/cyl圧指令値>w/cyl圧実値の場合は、実減速度が目標減速度より小さく、実減速度を目標減速度に一致させるようにホイールシリンダ圧の昇圧を必要とすることから、ステップS16以降へ進む。
【0077】
ステップS15にて、w/cyl圧指令値>w/cyl圧実値と判断された場合、図4のフローチャートにおいて、ステップS15からステップS16→ステップS17→ステップS18→ステップS19→ステップS20→ステップS21→リターンへと進む。ステップS16では、昇圧勾配の制限を変更する情報であるブレーキリリース前の踏み込み量とシフト情報と路面勾配とマスターシリンダ圧情報とを読み込む。ステップS17では、ブレーキリリース前の踏み込み量に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配が演算される。ステップS18では、路面勾配に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配が演算される。ステップS19では、シフト情報に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配が演算される。ステップS20では、マスターシリンダ圧情報に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配が演算される。
【0078】
すなわち、停車時モータOFF制御の終了時に、ホイールシリンダ圧の低下によりw/cyl圧指令値>w/cyl圧実値と判断された場合、昇圧勾配制限部であるステップS15〜ステップS20において、昇圧勾配が制限される。昇圧勾配の制限とは、ホイールシリンダ圧を上昇させるVDCブレーキ液圧アクチュエータ2への昇圧指令に対し、昇圧特性の昇圧勾配(特性の傾き、ゲイン)を、制限無しのときの昇圧勾配に比べて緩勾配になるように制限することをいう。
【0079】
したがって、図8の時刻t3において車速の発生により停車時モータOFF制御が終了すると、低下している目標差圧を徐々に立ち上げる差圧弁コントロールと、VDCモータ21の回転数を徐々に上げるポンプアップ昇圧が行われる。このVDCモータ21の作動再開直後、図8の矢印D’に示すように、ホイールシリンダ圧が緩勾配にて上昇する。そして、緩やかなポンプアップ昇圧によりブレーキ液の急な吸込みが抑えられ、図8の矢印E’に示すように、マスターシリンダ圧が緩勾配にて低下する。
【0080】
このように、ホイールシリンダ圧が緩勾配にて上昇するため、図8の矢印F’に示すように、車速が時刻t3から加速から緩やかな低下勾配で減速へと変動する。そして、図8の矢印G’に示すように、減速度が時刻t3から加速側から緩やかな低下勾配で減速側へ変動する。この結果、ドライバに与える減速度違和感が抑えられる。加えて、マスターシリンダ圧が緩勾配にて低下するため、図8の矢印H’に示すように、ペダル反力が時刻t3から滑らかな勾配にて低下し、ドライバに与えるペダルフィール違和感が抑えられる。
【0081】
次に、昇圧勾配の制限度合いを変更する昇圧勾配変更作用を、(a)ブレーキリリース前の踏み込み量に基づく昇圧勾配変更作用と、(b)路面勾配に基づく昇圧勾配変更作用と、(c)シフト情報に基づく昇圧勾配変更作用と、(d)マスターシリンダ圧情報に基づく昇圧勾配変更作用と、に分けて説明する。
【0082】
(a)ブレーキリリース前の踏み込み量に基づく昇圧勾配変更作用
ブレーキリリース前の踏み込み量に基づく昇圧勾配は、ブレーキリリース前の踏み込み量が大きいほど、勾配制限を大きくとって緩勾配とされる。ブレーキリリース前の踏み込み量が大きいときには、昇圧勾配が小さくされる。また、ブレーキリリース前の踏み込み量が小さいときには、昇圧勾配が大きくされる。
これは、ブレーキリリース前の踏み込み量が大きいときには、図8に示すように、目標差圧を減じる量が大きくなり、車速発生時の昇圧量が大きくなる。一方、ブレーキリリース前の踏み込み量が小さいときには、目標差圧を減じる量が小さくなり、車速発生時の昇圧量が小さくなることによる。
したがって、ブレーキリリース前の踏み込み量が大きいときには、昇圧勾配が小さくすることで、ペダルフィールが優先され、減速度違和感やペダルフィール違和感が小さく抑えられる。一方、ブレーキリリース前の踏み込み量が小さいときには、昇圧勾配を大きくすることで、ドライバの減速要求が優先され、減速度違和感やペダルフィール違和感を抑えながらも、要求される減速度の早期発生が確保される。
【0083】
(b)路面勾配に基づく昇圧勾配変更作用
路面勾配に基づく昇圧勾配は、路面勾配が大きな勾配を示すほど、勾配制限を小さくとって急勾配とされる。一方、路面勾配が平坦路に近いほど、勾配制限を大きくとって緩勾配とされる。
すなわち、登坂路停車の場合、制動力の低下により車両のずり下がりが発生するが、このずり下がりによる車速発生時にホイールシリンダ圧の昇圧が遅れると、車両のずり下がりを許してしまうことになる。降坂路の場合、制動力の低下により車両の押し出しが発生するが、この車両の押し出しによる車速発生時にホイールシリンダ圧の昇圧が遅れると、車両の押し出しを許してしまうことになる。
したがって、登坂路や降坂路での坂道停車時であって、路面勾配が大きな勾配を示すときには、ドライバの制動要求が早急であるとの判断に基づき、路面勾配に基づく昇圧勾配を急勾配とする。これにより、登坂路停車時には、車両のずり下がりが防止され、降坂路停車時には、車両の押し出しが防止される。つまり、坂道停車時には、早急なドライバの制動要求に応え、ホイールシリンダ圧の昇圧が遅れることがない。
一方、平坦路停車時であって、路面勾配が平坦路に近いときには、ドライバの制動要求が早急でなく、ペダルフィールの優先状況であるとの判断に基づき、路面勾配に基づく昇圧勾配を緩勾配とすることで、減速度違和感やペダルフィール違和感が小さく抑えられる。
【0084】
(c)シフト情報に基づく昇圧勾配変更作用
シフト情報に基づく昇圧勾配は、登坂時と降坂時で分けて設定する。
まず、Dレンジでの登坂時には、ドライバの制動要求が早急でないと判断し、勾配制限を大きくとって緩勾配とする。一方、NレンジやRレンジでの登坂時には、Dレンジよりも早急性が高いと判断し、勾配制限を小さくとって急勾配とする。
また、Rレンジでの降坂時には、ドライバの制動要求が早急でないと判断し、勾配制限を大きくとって緩勾配とする。一方、NレンジやDレンジでの降坂時には、Rレンジよりも早急性が高いと判断し、勾配制限を小さくとって急勾配とする。
このように、シフト情報に基づいて昇圧勾配を決めることで、車両が動いて車速が発生したことを検知した際、路面勾配とシフトの組み合わせによるドライバ制動要求の早急性にあわせた制動力を提供することができる。
例えば、登坂路停車時に選択されているシフト位置がDレンジであれば、車両のずり下がりの進行方向(後退方向)に対して反対方向である車両の前進方向に駆動力が発生する。このため、その状態でのNレンジやRレンジ時よりも早急性が高くないと判断する。Nレンジ時やRレンジ時には、車両のずり下がりに対する反力が発生しないため、Dレンジ時よりも早急性が高いと判断し、昇圧勾配を急にすることで、ドライバの制動力要求の早急性に合わせた減速度を提供することができる。
逆に、降坂路停車時に選択されているシフト位置がRレンジであれば、車両のずり下がりの進行方向(前進方向)に対して反対方向である車両の後退方向に駆動力が発生している。このため、登坂路停車時のDレンジと同じように早急性は高くないと判断する。Nレンジ時やDレンジ時には、車両のずり下がりに対する反力が発生しないため、Rレンジ時よりも早急性が高いと判断し、昇圧勾配を急にする。
さらに、ブレーキリリース前の踏み込み量を考慮に加え、ペダルフィール優先とするシーンか、減速度を早急に発生させるシーンか、どうかを判断する。そして、減速度を早急に発生させるシーンである場合は、リリース前の踏み込み量が大きかったとしても、VDCブレーキ液圧アクチュエータ2の上昇勾配を急にすることで、ドライバによる制動要求の早急性に合わせた減速度を提供することができる。
【0085】
(d)マスターシリンダ圧情報に基づく昇圧勾配変更作用
マスターシリンダ圧情報に基づく昇圧勾配は、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配よりも緩勾配とされる。例えば、昇圧前にマスターシリンダ圧の発生がある場合には、図5の昇圧特性Aに示すように、昇圧勾配Kaが小さくされる。また、昇圧前にマスターシリンダ圧の発生がない場合には、図5の昇圧特性Bに示すように、昇圧勾配Kb(>Ka)が大きくされる。
この理由を説明する。昇圧前にマスターシリンダ圧の発生がないときは、大気圧であるリザーバ14とマスターシリンダ13の間のリリーフポートが開いている。したがって、マスターシリンダ圧の発生がない状態でVDCブレーキ液圧アクチュエータ2が作動すると、リザーバ14からブレーキ液を供給するため、マスターシリンダ圧は変動しない。
一方、マスターシリンダ圧の発生があるときは、ブレーキペダル11の踏み込み量が進むことで、リザーバ14とマスターシリンダ13の間のリリーフポートが閉じている。したがって、マスターシリンダ圧の発生がある状態でVDCブレーキ液圧アクチュエータ2が作動すると、密閉されたマスターシリンダ13からブレーキ液を供給するため、マスターシリンダ圧が低下し、これに伴いブレーキペダル反力も低下する。
このため、実施例1では、昇圧前におけるマスターシリンダ圧の発生有無により、ペダルフィールを優先する昇圧勾配制御と、ドライバの減速度要求を優先する昇圧勾配制御とに切り分けた。
したがって、図8の矢印E’に示すように、昇圧前にマスターシリンダ圧の発生があるときには、図8の矢印D’に示すように、昇圧勾配Kaが小さくする。このため、ペダルフィールが優先され、図8の矢印F’,G’,H’に示すように、減速度違和感やペダルフィール違和感が小さく抑えられる。
一方、図9の矢印E”に示すように、昇圧前にマスターシリンダ圧の発生がないときには、図9の矢印D”に示すように、昇圧勾配Kbを大きくする。このため、ドライバの減速要求が優先され、図9の矢印F”,G”,H”に示すように、減速度違和感やペダルフィール違和感を抑えながらも、要求される減速度の早期発生が確保される。
【0086】
次に、効果を説明する。
実施例1のハイブリッド車のブレーキ制御装置にあっては、下記に列挙する効果を得ることができる。
【0087】
(1) ブレーキ操作に応じたマスターシリンダ圧を発生するマスターシリンダ13と、
前後輪の各輪に設けられ、ホイールシリンダ圧に応じて各輪に液圧制動力を与えるホイールシリンダ4FL,4FR,4RL,4RRと、
前記マスターシリンダ13と前記ホイールシリンダ4FL,4FR,4RL,4RRとの間に介装され、ポンプモータ(VDCモータ21)により駆動する液圧ポンプ22,22と、ホイールシリンダ圧とマスターシリンダ圧の差圧を制御する差圧弁(第1M/Cカットソレノイドバルブ25、第2M/Cカットソレノイドバルブ26)と、を有するブレーキ液圧アクチュエータ(VDCブレーキ液圧アクチュエータ2)と、
ブレーキ操作により車両が停止するとき、前記ポンプモータ(VDCモータ21)を停止し、車両停止中、前記ポンプモータ(VDCモータ21)の停止状態を維持したままとする停車時モータオフ制御部(ステップS9)と、
車両停止状態からの車速発生により前記停車時モータオフ制御が終了すると、前記ポンプモータ(VDCモータ21)の作動再開に伴うホイールシリンダ圧の昇圧勾配を制限により緩勾配にすると共に、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配より緩やかにする昇圧勾配制限部(ステップS15〜ステップS20)と、
を備える。
このため、車両停止状態でのポンプモータ(VDCモータ21)の耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成することができる。加えて、昇圧前にマスターシリンダ圧の発生があるとき、ペダルフィール違和感や減速度違和感を抑えることができ、昇圧前にマスターシリンダ圧の発生がないとき、ドライバの減速度要求に応えることができる。
【0088】
(2) 前記昇圧勾配制限部(ステップS15〜ステップS20)は、昇圧前にマスターシリンダ圧が発生したかどうかの情報を、ブレーキペダル11のストローク量により取得する。
このため、上記(1)の効果に加え、昇圧勾配制御の切り分け理由となっているリザーバ14とマスターシリンダ13の間のリリーフポートが閉じているか開いているかを精度良く検知することができる。
【0089】
(3) 前記昇圧勾配制限部(ステップS15〜ステップS20)は、路面勾配が大きな勾配を示すほど、昇圧勾配を急勾配側に制限変更する(ステップS18)。
このため、上記(1)または(2)の効果に加え、路面勾配が大きな勾配を示すとき、車両のずり下がりや車両の押し出しを防止することができる。
【実施例2】
【0090】
実施例2は、マスターシリンダ圧情報に基づいて昇圧勾配を演算する際、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、マスターシリンダ圧の高さに応じて変更するようにした例である。
【0091】
まず、図4のフローチャートは、実施例2においても同様とするが、ステップS20の演算内容を異ならせる。
【0092】
実施例2のステップS20では、マスターシリンダ圧情報に基づきホイールシリンダ圧の昇圧特性の傾きであるゲイン(昇圧勾配)を、昇圧前のマスターシリンダ圧がある場合には、マスターシリンダ圧が高いほど大きくする。
【0093】
すなわち、昇圧前にマスターシリンダ圧の発生がない場合には、図10に示すように、実施例1と同様に、ドライバの減速要求を優先し、ゲインG1(=昇圧勾配Kb)を大きな値とする。しかし、昇圧前にマスターシリンダ圧の発生がある場合には、実施例1のようにゲインG2(=昇圧勾配Ka)を一定値により与えるのではなく、図11に示すように、マスターシリンダ圧が高くなるほど大きくなる値によるゲインGVとする。
【0094】
この理由を説明すると、マスターシリンダ圧の発生があるときは、ブレーキペダル11の踏み込み量が進むことで、リザーバ14とマスターシリンダ13の間のリリーフポートが閉じている。したがって、マスターシリンダ圧の発生がある状態でVDCブレーキ液圧アクチュエータ2が作動すると、密閉されたマスターシリンダ13からブレーキ液を供給するため、マスターシリンダ圧が低下し、これに伴いブレーキペダル反力も低下する。つまり、ホイールシリンダ圧を上昇させるのに、密閉されたマスターシリンダ13からのブレーキ液をどれだけ消費するかが、ブレーキペダル反力の低下幅に影響する。
【0095】
そこで、ホイールシリンダ圧と液消費量の関係をみると、図11に示すように、ホイールシリンダ圧を低圧側と高圧側とで同じ幅xMPaにより変動させたときの液消費量の大きさは、低圧側での液消費量aが、高圧側での液消費量bよりも大きくなる。
このことは、マスターシリンダ圧が低圧側であるほど、同じ上昇幅でホイールシリンダ圧を昇圧したときの液消費量が大きく、これに伴うブレーキペダル反力の低下幅が大きくなることを意味する。一方、マスターシリンダ圧が高圧側であるほど、同じ上昇幅でホイールシリンダ圧を昇圧したときの液消費量が小さく、これに伴うブレーキペダル反力の低下幅が小さくなることを意味する。
【0096】
このような液消費量関係に適合させるため、実施例2では、図10に示すように、マスターシリンダ圧が高くなるほど大きくなる値によるゲインGVとする。したがって、昇圧前にマスターシリンダ圧の発生があるときには、単にペダルフィールが優先されるばかりでなく、昇圧前のマスターシリンダ圧の高さにかかわらず、減速度違和感やペダルフィール違和感が小さく抑えられる。
なお、他の構成は、実施例1と同様であるし、他の作用は、実施例1と同様であるので、図示並びに説明を省略する。
【0097】
次に、効果を説明する。
実施例2のハイブリッド車のブレーキ制御装置にあっては、下記の効果を得ることができる。
【0098】
(4) 前記昇圧勾配制限部(ステップS15〜ステップS20)は、昇圧前にマスターシリンダ圧の発生がある場合、マスターシリンダ圧が高いほど、昇圧勾配を急勾配側に制限変更する(ステップS20)。
このため、実施例1の(1)〜(3)の効果に加え、昇圧前にマスターシリンダ圧の発生があるとき、昇圧前のマスターシリンダ圧の高さにかかわらず、減速度違和感やペダルフィール違和感を小さく抑えることができる。
【0099】
以上、本発明の車両のブレーキ制御装置を実施例1及び実施例2に基づき説明してきたが、具体的な構成については、これらの実施例に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0100】
実施例1,2では、車速発生により停車時モータOFF制御が終了する時、ブレーキリリース前の踏み込み量に基づく昇圧勾配と、路面勾配に基づく昇圧勾配と、シフト情報に基づく昇圧勾配と、マスターシリンダ圧情報に基づく昇圧勾配と、を演算により求める例を示した。しかし、これらの路面勾配(=ゲイン)は、上昇レイトリミッタを変更する例としても良いし、また、シーン別に設定したマップで代用してもよい。なお、シーン別とは、2段階や3段階といった有段な区別でなくても、例えば、マップ補完により無段階に区別するようにしても良い。
【0101】
実施例1,2では、昇圧勾配制限部として、w/cyl圧指令値がw/cyl圧実値より小さいと判断されたとき、ブレーキリリース前の踏み込み量・路面勾配・シフト情報・マスターシリンダ圧情報に基づき制限する例を示した。しかし、車速発生時、目標減速度と実減速度に差異が発生し、ブレーキ液圧アクチュエータにより昇圧が必要なとき、マスターシリンダ圧情報のみにより昇圧勾配の制限を変更するような例としても良い。
【0102】
実施例1では、昇圧前のマスターシリンダ圧情報を、マスターシリンダ圧が発生しているか発生していないかにより分け、それぞれについて昇圧勾配Ka,Kb(ゲインG1,G2)を与える例を示した。実施例2では、マスターシリンダ圧が発生しているとき、マスターシリンダ圧の高さに応じて曲線特性により変化するゲインGVにより与える例を示した。しかし、マスターシリンダ圧が発生しているとき、2段階や3段階といった有段なゲインにより与える例としても良い。
【0103】
実施例1,2では、ブレーキ液圧アクチュエータとして、図2に示すVDCブレーキ液圧アクチュエータ2を利用する例を示した。しかし、ブレーキ液圧アクチュエータとしては、ポンプモータにより駆動する液圧ポンプと、ホイールシリンダ圧とマスターシリンダ圧の差圧を制御する差圧弁と、を有するものであれば良い。
【0104】
実施例1,2では、本発明のブレーキ制御装置を、前輪駆動のハイブリッド車へ適用した例を示した。しかし、後輪駆動のハイブリッド車、電気自動車、燃料電池車、等の電動車両であり、液圧制動力と回生制動力による回生協調ブレーキ制御を行うものであれば、本発明のブレーキ制御装置を適用することができる。さらに、エンジン車であり、停車時モータOFF制御を採用したブレーキ液圧アクチュエータを用い、液圧制動力のみによってブレーキ制御を行うものであっても本発明のブレーキ制御装置を適用することができる。
【符号の説明】
【0105】
1 ブレーキ液圧発生装置
13 マスターシリンダ
14 リザーバ
2 VDCブレーキ液圧アクチュエータ(ブレーキ液圧アクチュエータ)
21 VDCモータ(ポンプモータ)
22 液圧ポンプ
24 マスターシリンダ圧センサ
25 第1M/Cカットソレノイドバルブ(差圧弁)
26 第2M/Cカットソレノイドバルブ(差圧弁)
3 ストロークセンサ
4FL 左前輪ホイールシリンダ
4FR 右前輪ホイールシリンダ
4RL 左後輪ホイールシリンダ
4RR 右後輪ホイールシリンダ
5 走行用電動モータ
61 プライマリ液圧管
62 セカンダリ液圧管
63 左前輪液圧管
64 右前輪液圧管
65 左後輪液圧管
66 右後輪液圧管
7 ブレーキコントローラ
8 モータコントローラ
9 統合コントローラ
9a 目標減速度算出部
9b 回生協調ブレーキ制御部
91 バッテリコントローラ
92 車輪速センサ
93 ブレーキスイッチ
94 路面勾配センサ
95 シフト位置センサ
96 ホイールシリンダ圧センサ
【技術分野】
【0001】
本発明は、ポンプモータと差圧弁を有するブレーキ液圧アクチュエータを備えた車両のブレーキ制御装置に関する。
【背景技術】
【0002】
従来の車両用ブレーキ装置としては、ブレーキペダルストロークやマスターシリンダ圧等によりドライバ入力量を検知し、ドライバ入力量とドライバ要求減速度特性マップを用いてドライバ要求減速度を算出する。そして、算出したドライバ要求減速度を達成すべく、マスターシリンダからの負圧ブースタ出力(基本液圧分)に対し、フィードフォワード制御にて上乗せ制動分を発生させるものが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−96218号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の車両用ブレーキ装置にあっては、上乗せ制動分を、マスターシリンダとホイールシリンダの間に介装したブレーキ液圧アクチュエータにおいて、差圧弁コントロールとポンプアップ昇圧により得るようにしている。つまり、マスターシリンダ圧より高いホイールシリンダ圧をポンプアップ昇圧により発生し、ホイールシリンダ圧とマスターシリンダ圧の差圧により上乗せ制動分を得るようにしている。
【0005】
このため、制動時は、常時、ブレーキ液圧アクチュエータのポンプアップ昇圧を行うポンプモータを作動させる必要がある。そこで、ポンプモータの耐久性を確保するため、車両停止時は制動中であってもポンプモータを止め、ホイールシリンダ圧を保持するように制御した場合、ブレーキペダルリリースしながら徐々に車速が発生するタイミングでのブレーキペダル維持時や再踏み込み時、ブレーキ液圧アクチュエータが作動することで、ペダルフィール違和感や減速度違和感が発生する、という問題があった。
【0006】
本発明は、上記問題に着目してなされたもので、車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成することができる車両のブレーキ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の車両のブレーキ制御装置は、マスターシリンダと、ホイールシリンダと、をブレーキ液圧アクチュエータと、停車時モータオフ制御部と、昇圧勾配制限部と、備える手段とした。
前記マスターシリンダは、ブレーキ操作に応じたマスターシリンダ圧を発生する。
前記ホイールシリンダは、前後輪の各輪に設けられ、ホイールシリンダ圧に応じて各輪に液圧制動力を与える。
前記ブレーキ液圧アクチュエータは、前記マスターシリンダと前記ホイールシリンダとの間に介装され、ポンプモータにより駆動する液圧ポンプと、ホイールシリンダ圧とマスターシリンダ圧の差圧を制御する差圧弁と、を有する。
前記停車時モータオフ制御部は、ブレーキ操作により車両が停止するとき、前記ポンプモータを停止し、車両停止中、前記ポンプモータの停止状態を維持したままとする。
前記昇圧勾配制限部は、車両停止状態からの車速発生により前記停車時モータオフ制御が終了すると、前記ポンプモータの作動再開に伴うホイールシリンダ圧の昇圧勾配を制限により緩勾配にすると共に、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配より緩やかにする。
【発明の効果】
【0008】
したがって、ブレーキ操作による車両停止時、停車時モータオフ制御中にブレーキ踏み増し操作が行われた場合、差圧弁による差圧を減らし、ホイールシリンダ圧を維持したままでマスターシリンダ圧が上昇する。その後、ブレーキ踏み戻し操作が行われると、マスターシリンダ圧の低下に伴いホイールシリンダ圧が低下する。そして、ホイールシリンダ圧の低下により車速が発生すると、停車時モータオフ制御が終了する。
停車時モータオフ制御が終了した時点でホイールシリンダ圧による実減速度が目標減速度より小さいときには、低下しているホイールシリンダ圧を、差圧弁コントロールとポンプアップ昇圧により上昇させる昇圧指令が出力される。
この昇圧指令に対し、昇圧勾配制限部において、昇圧勾配が制限されて緩勾配によりホイールシリンダ圧を上昇させるため、車速発生時、急な減速度の発生や急減するペダル反力の発生が抑えられる。
さらに、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配が、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配より緩やかにされる。すなわち、マスターシリンダ圧の発生がないときは、リリーフポートが開いていてマスターシリンダ圧が変動せず、マスターシリンダ圧の発生があるときは、リリーフポートが閉じていてマスターシリンダ圧が変動し、ブレーキペダル反力が低下する。このため、昇圧前におけるマスターシリンダ圧の発生有無により、ペダルフィールを優先する昇圧勾配制御と、ドライバの減速度要求を優先する昇圧勾配制御とに切り分けられる。
この結果、停車時モータオフ制御により車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成することができる。加えて、昇圧前にマスターシリンダ圧の発生があるとき、ペダルフィール違和感や減速度違和感を抑えることができ、昇圧前にマスターシリンダ圧の発生がないとき、ドライバの減速度要求に応えることができる。
【図面の簡単な説明】
【0009】
【図1】実施例1のブレーキ制御装置を適用した前輪駆動によるハイブリッド車の構成を示すブレーキシステム図である。
【図2】実施例1のブレーキ制御装置におけるVDCブレーキ液圧アクチュエータを示すブレーキ液圧回路図である。
【図3】実施例1のブレーキ制御装置における回生協調ブレーキ制御系を示す制御ブロック図である。
【図4】実施例1のブレーキ制御装置における統合コントローラで実行される回生協調ブレーキ制御処理の流れを示すフローチャートである。
【図5】実施例1のブレーキ制御装置における統合コントローラで実行される回生協調ブレーキ制御処理において車速発生時の昇圧特性の昇圧勾配をマスターシリンダ圧またはストローク量に基づいて制限する一例を示す昇圧特性図である。
【図6】VDCを利用した回生協調ブレーキシステムにより目標減速度(=ドライバ要求減速度)を基本液圧分と回生分と昇圧分の総和により達成する回生協調ブレーキ制御でのドライバ入力に対する減速度分担関係の一例を示す制御概念説明図である。
【図7】比較例のブレーキ制御装置において車速発生時のうち停車時モータOFF制御中にペダル踏み増し操作が行われたときの課題をモータOFF制御・車速・ホイールシリンダ圧・目標差圧・マスターシリンダ圧・減速度・ペダル反力の各特性により示すタイムチャートである。
【図8】実施例1のブレーキ制御装置において車速発生時の昇圧勾配制限効果1を車速・モータOFF制御・ホイールシリンダ圧・目標差圧・マスターシリンダ圧・減速度・ペダル反力の各特性により示すタイムチャートである。
【図9】実施例1のブレーキ制御装置において車速発生時の昇圧勾配制限効果2を車速・モータOFF制御・ホイールシリンダ圧・目標差圧・マスターシリンダ圧・減速度・ペダル反力の各特性により示すタイムチャートである。
【図10】実施例2のブレーキ制御装置における統合コントローラで実行される回生協調ブレーキ制御処理において車速発生時の昇圧特性のゲイン(=昇圧勾配)をマスターシリンダ圧の高さに応じて制限する一例を示すゲイン特性図である。
【図11】実施例2においてホイールシリンダ圧を低圧側と高圧側とで同じ幅で変動させたときの液消費量の大きさの違いを説明するためのホイールシリンダ圧と液消費量の関係を示す特性図である。
【発明を実施するための形態】
【0010】
以下、本発明の車両のブレーキ制御装置を実現する最良の形態を、図面に示す実施例1及び実施例2に基づいて説明する。
【実施例1】
【0011】
まず、構成を説明する。
実施例1の車両のブレーキ制御装置の構成を、「全体構成」、「回生協調ブレーキ制御のブロック構成」、「回生協調ブレーキ制御の処理構成」に分けて説明する。
【0012】
[全体構成]
図1は、実施例1のブレーキ制御装置を適用した前輪駆動による電動車両の一例であるハイブリッド車の構成を示し、図2は、ブレーキ液圧アクチュエータの一例であるVDCブレーキ液圧アクチュエータを示す。以下、図1及び図2に基づき、VDCを利用した回生協調ブレーキシステムの全体構成を説明する。
【0013】
実施例1のブレーキ制御装置のブレーキ減速度発生系は、図1に示すように、ブレーキ液圧発生装置1と、VDCブレーキ液圧アクチュエータ2(ブレーキ液圧アクチュエータ)と、ストロークセンサ3と、左前輪ホイールシリンダ4FLと、右前輪ホイールシリンダ4FRと、左後輪ホイールシリンダ4RLと、右後輪ホイールシリンダ4RRと、走行用電動モータ5と、を備えている。
【0014】
すなわち、既存のVDCシステム(VDCは、「Vehicle Dynamics Control」の略)を利用した回生協調ブレーキシステムによる構成としている。VDCシステムとは、高速でのコーナー進入や急激なハンドル操作などによって車両姿勢が乱れた際、横滑りを防ぎ、優れた走行安定性を発揮する車両挙動制御(=VDC制御)を行うシステムである。VDC制御では、例えば、旋回挙動がオーバーステア側であると感知すると、コーナー外側の前輪にブレーキをかけ、逆に、旋回挙動がアンダーステア側であると感知すると、駆動パワーを落とすとともに後輪のコーナー内側のタイヤにブレーキをかける。
【0015】
前記ブレーキ液圧発生装置1は、ドライバによるブレーキ操作に応じた基本液圧分を発生する基本液圧発生手段である。このブレーキ液圧発生装置1は、図1及び図2に示すように、ブレーキペダル11と、負圧ブースタ12と、マスターシリンダ13と、リザーバ14と、を有する。つまり、ブレーキペダル11に加えられたドライバのブレーキ踏力を、負圧ブースタ12により倍力し、マスターシリンダ13においてマスターシリンダ圧(プライマリ液圧、セカンダリ液圧)を作り出す。このとき、マスターシリンダ圧で発生する減速度が、目標減速度(=ドライバ要求減速度)より小さくなるように予め設計する。
【0016】
前記VDCブレーキ液圧アクチュエータ2は、ブレーキ液圧発生装置1と各輪のホイールシリンダ4FL,4FR,4RL,4RRとの間に介装され、マスターシリンダ圧の増圧・保持・減圧を制御する。このVDCブレーキ液圧アクチュエータ2とブレーキ液圧発生装置1とは、プライマリ液圧管61とセカンダリ液圧管62により接続されている。VDCブレーキ液圧アクチュエータ2と各輪のホイールシリンダ4FL,4FR,4RL,4RRとは、左前輪液圧管63と右前輪液圧管64と左後輪液圧管65と右後輪液圧管66により接続されている。つまり、ブレーキ操作時には、ブレーキ液圧発生装置1により発生したマスターシリンダ圧を、VDCブレーキ液圧アクチュエータ2により制御し、各輪のホイールシリンダ4FL,4FR,4RL,4RRに加えることで液圧制動力を得るようにしている。
【0017】
前記VDCブレーキ液圧アクチュエータ2の具体的構成は、図2に示すように、VDCモータ21と、VDCモータ21(ポンプモータ)により駆動する液圧ポンプ22,22と、リザーバ23,23と、マスターシリンダ圧センサ24と、を有する。ソレノイドバルブ類として、第1M/Cカットソレノイドバルブ25(差圧弁)と、第2M/Cカットソレノイドバルブ26(差圧弁)と、保持ソレノイドバルブ27,27,27,27と、減圧ソレノイドバルブ28,28,28,28と、を有する。第1M/Cカットソレノイドバルブ25と第2M/Cカットソレノイドバルブ26は、ホイールシリンダ圧(下流圧)とマスターシリンダ圧(上流圧)の差圧を制御する。
【0018】
前記ストロークセンサ3は、ドライバによるブレーキペダル操作量をポテンショメータ等により検出する手段である。このストロークセンサ3は、回生協調ブレーキ制御での必要情報である目標減速度(=ドライバ要求減速度)を検出する構成として、既存のVDCシステムに対して追加された部品である。
【0019】
前記各ホイールシリンダ4FL,4FR,4RL,4RRは、前後各輪のブレーキディスクに設定され、VDCブレーキ液圧アクチュエータ2からの液圧が印加される。そして、各ホイールシリンダ4FL,4FR,4RL,4RRへの液圧印加時、ブレーキパットによりブレーキディスクを挟圧することにより、前後輪に液圧制動力を付与する。
【0020】
前記走行用電動モータ5は、左右前輪(駆動輪)の走行用駆動源として設けられ、駆動モータ機能と発電ジェネレータ機能を持つ。この走行用電動モータ5は、力行時、バッテリ電力を消費しながらのモータ駆動により、左右前輪へ駆動力を伝達する。そして、回生時、左右前輪の回転駆動に負荷を与えることで電気エネルギーに変換し、発電分をバッテリへ充電する。つまり、左右前輪の回転駆動に与える負荷が、回生制動力となる。この走行用電動モータ5が設けられる左右前輪(駆動輪)の駆動系には、走行用電動モータ5以外に、走行用駆動源としてエンジン10が設けられ、変速機11を介して左右前輪へ駆動力を伝達する。
【0021】
実施例1のブレーキ制御装置のブレーキ減速度制御系は、図1に示すように、ブレーキコントローラ7と、モータコントローラ8と、統合コントローラ9と、エンジンコントローラ12と、を備えている。
【0022】
前記ブレーキコントローラ7は、統合コントローラ9からの指令とVDCブレーキ液圧アクチュエータ2のマスターシリンダ圧センサ24からの圧力情報を入力する。そして、所定の制御則にしたがって、VDCブレーキ液圧アクチュエータ2のVDCモータ21とソレノイドバルブ類25,26,27,28に対し駆動指令を出力する。このブレーキコントローラ7では、回生協調ブレーキ制御時、統合コントローラ9から昇圧分指令を入力すると、ホイールシリンダ圧(下流圧)とマスターシリンダ圧(上流圧)の差圧を制御する。差圧制御は、目標差圧に対する第1M/Cカットソレノイドバルブ25と第2M/Cカットソレノイドバルブ26への作動電流値による差圧コントロールにより行われる。ここで、差圧制御は、VDCモータ21の作動時、VDCモータ21によるポンプアップ昇圧と併用して行われ、VDCモータ21の停止時、差圧コントロールのみにより行われる。なお、ブレーキコントローラ7では、回生協調ブレーキ制御以外に、上記VDC制御やTCS制御やABS制御、等を行う。
【0023】
前記モータコントローラ8は、駆動輪である左右前輪に連結された走行用電動モータ5にインバータ13を介して接続される。そして、回生協調ブレーキ制御時、統合コントローラ9から回生分指令を入力すると、走行用電動モータ5により発生する回生制動力を入力された回生分指令に応じて制御する回生制動力制御手段である。このモータコントローラ8は、走行時、走行状態や車両状態に応じて走行用電動モータ5により発生するモータトルクやモータ回転数を制御する機能も併せ持つ。
【0024】
前記統合コントローラ9は、ブレーキ操作時、目標減速度を、マスターシリンダ圧による基本液圧分と上乗せ制動分(回生制動力による回生分と、VDCブレーキ液圧アクチュエータ2による昇圧分と、の少なくとも一方)の総和で達成する回生協調ブレーキ制御を行う。このとき、目標減速度は、ストロークセンサ3からのペダルストロークセンサ値と、設定されている目標減速度特性マップと、に基づいて決める。この統合コントローラ9には、バッテリコントローラ91からのバッテリ充電容量情報、車輪速センサ92からの車輪速情報、ブレーキスイッチ93からのブレーキ操作情報、ストロークセンサ3からのブレーキペダルストローク情報、マスターシリンダ圧センサ24からのマスターシリンダ圧情報、等が入力される。
【0025】
[回生協調ブレーキ制御のブロック構成]
図3は、実施例1のブレーキ制御装置における回生協調ブレーキ制御系を示す。以下、図3に基づいて、回生協調ブレーキ制御のブロック構成を説明する。
実施例1の回生協調ブレーキ制御系は、図3に示すように、ブレーキコントローラ7と、モータコントローラ8と、統合コントローラ9と、を備えている。
【0026】
前記ブレーキコントローラ7は、統合コントローラ9から昇圧分指令を入力し、VDCブレーキ液圧アクチュエータ2のVDCモータ21と両カットソレノイドバルブ25,26と、各ソレノイドバルブ27,28に対し駆動指令を出力する。
【0027】
前記モータコントローラ8は、統合コントローラ9から回生分指令を入力し、走行用電動モータ5を制御するインバータ13に回生指令を出力する。
【0028】
前記統合コントローラ9は、ストロークセンサ3からのペダルストロークセンサ値、マスターシリンダ圧センサ24からのMC圧センサ値と、車輪速センサ92からの車輪速センサ値と、を入力する。加えて、路面勾配センサ94からの路面勾配情報と、シフト位置センサ95から選択されているレンジ位置(Dレンジ、Nレンジ、Rレンジ、等)を示すシフト情報と、ホイールシリンダ圧センサ96からのWC圧センサ値と、を入力する。そして、これらの情報に基づく演算処理部として、目標減速度算出部9aと、回生協調ブレーキ制御部9bと、を有する。
【0029】
前記目標減速度算出部9aは、目標減速度特性マップによる目標減速度特性と、ストロークセンサ3からのペダルストロークセンサ値と、に基づき、目標減速度(=ドライバ要求減速度)を算出する。
【0030】
前記回生協調ブレーキ制御部9bは、目標減速度算出部9aにて算出された目標減速度と、マスターシリンダ圧センサ24からのMC圧センサ値と、車輪速センサ92からの車輪速センサ値を入力する。そして、MC圧センサ値に基づいて基本液圧分を決め、車輪速センサ値に基づいて回生分を決め、可能な限り目標減速度を基本液圧分+回生分の総和で達成するようにし、不足が生じたときその不足分を昇圧分により補償する回生協調ブレーキ制御演算を行う。この演算結果にしたがって、回生分に対応する回生分指令をモータコントローラ8に出力し、昇圧分に対応する昇圧分指令をブレーキコントローラ7に出力する。
【0031】
[回生協調ブレーキ制御の処理構成]
図4は、実施例1のブレーキ制御装置における統合コントローラ8で実行される回生協調ブレーキ制御処理の流れを示すフローチャートである。以下、図4に基づいて、回生協調ブレーキ制御の処理構成をあらわす各ステップを説明する。なお、この回生協調ブレーキ制御処理は、ブレーキ操作開始が判断された時点からスタートし、ブレーキ操作解除により終了する。
【0032】
ステップS1では、ブレーキ操作開始前において停止状態のVDCモータ21をモータ駆動状態にし、ステップS2へ進む。
【0033】
ステップS2では、ステップS1でのモータ駆動、あるいは、ステップS7での車両非停止状態であるとの判断に続き、マスターシリンダ圧センサ24からのマスターシリンダ圧情報と、ストロークセンサ3からのペダルストローク量情報と、車輪速センサ92からの車輪速情報と、目標減速度特性マップと、を読み込み、ステップS3へ進む。
【0034】
ステップS3では、ステップS2での必要情報と目標減速度特性マップを読み込みに続き、ブレーキペダル踏み込み速度を算出し、ペダル踏み込み速度による目標減速度特性マップの補正を行い、ステップS4へ進む。
ここで、目標減速度特性マップの補正は、例えば、算出されたブレーキペダル踏み込み速度が、ペダル踏み込み速度情報より速くなっているほど、実マスターシリンダ圧発生開始ポイントまでのロスストロークを短くするようにストローク方向にずらすオフセット補正を施す。なお、目標減速度特性マップが有するペダル踏み込み速度情報と算出されたペダル踏み込み速度が一致するとき、または、両速度差が許容範囲内であるときは、設定されている目標減速度特性マップの補正を要さない。
【0035】
ステップS4では、ステップS3でのペダル踏み込み速度による目標減速度特性マップの補正に続き、ブレーキペダルストロークセンサ値と、補正後の目標減速度特性マップに基づき、ドライバ入力によるブレーキペダルストローク位置に対応する目標減速度を算出し、ステップS5へ進む。
【0036】
ステップS5では、ステップS4での目標減速度の算出に続き、そのときのMC圧センサ値に基づいて基本液圧分を決め、そのときの車輪速センサ値やバッテリSOCに基づいて可能な限り最大となる回生分を決める。そして、目標減速度から基本液圧分と回生分を差し引いた残りの減速度分を昇圧分により分担するように決める。つまり、目標減速度を基本液圧分+回生分+昇圧分の総和で達成する回生協調ブレーキ制御演算を行い、ステップS6へ進む。
【0037】
ステップS6では、ステップS5での回生協調ブレーキ制御演算に続き、基本液圧分に対する上乗せ目標制動力のうち、回生分に対応する回生分指令値を決定し、回生分指令(ゼロ指令を含む)をモータコントローラ8に出力する。同時に、基本液圧分に対する上乗せ目標制動力のうち、昇圧分に対応する昇圧分指令値を決定し、昇圧分指令(ゼロ指令を含む)をブレーキコントローラ7に出力し、ステップS7へ進む。
ここで、モータコントローラ8は、回生分指令を入力すると、回生分を目標回生制動力とし、走行用電動モータ5への回生電流値を決めるフィードフォワード制御により、回生トルク制御を行う。ブレーキコントローラ7は、昇圧分指令を入力すると、昇圧分を目標差圧とし、両M/Cカットソレノイドバルブ25,26への作動電流値を決めるフィードフォワード制御により、差圧コントロールを行う。
【0038】
ステップS7では、ステップS6での回生分指令と昇圧分指令の出力に続き、車輪速センサ92からの車輪速センサ値に基づき、車両が停止したか否かを判断する。YES(車両停止状態)の場合はステップS8へ進み、NO(車両非停止状態)の場合はステップS2へ戻る。
【0039】
ステップS8では、ステップS7での車両停止状態であるとの判断に続き、VDCモータ21のモータ駆動を停止し、ステップS9へ進む。
【0040】
ステップS9では、ステップS8でのモータ駆動停止、あるいは、ステップS12でのマスターシリンダ圧の低下開始でないとの判断、あるいは、ステップS13でのストローク量もメモリに続き、停車時モータOFF制御を実施し、ステップS10へ進む。
【0041】
ステップS10では、ステップS9での停車時モータOFF制御の実施に続き、車輪速センサ92からの車輪速センサ値に基づき、車輪速が発生したか否かを判断する。YES(車輪速発生)の場合にはステップS14へ進み、NO(車輪速非発生)の場合にはステップS11へ進む。
【0042】
ステップS11では、ステップS10での車輪速非発生(停車中)であるとの判断に続き、マスターシリンダ圧センサ24からのマスターシリンダ圧情報を読み込み、ステップS12へ進む。
【0043】
ステップS12では、ステップS11でのマスターシリンダ圧の読み込みに続き、マスターシリンダ圧が低下を開始したか否かを判断する。YES(マスターシリンダ圧の低下開始)の場合はステップS13へ進み、NO(マスターシリンダ圧が維持または上昇)の場合はステップS9へ進む。
【0044】
ステップS13では、ステップS12でのマスターシリンダ圧の低下開始判断に続き、そのときのストロークセンサ3からのペダルストローク量情報を読み込み、読み込んだストローク量をブレーキリリース前の踏み込み量として記憶し、ステップS9へ進む。
【0045】
ステップS14では、ステップS10での車輪速発生(=車速発生)であるとの判断に続き、停車中に継続していた停車時モータOFF制御を終了し、ステップS15へ進む。
【0046】
ステップS15では、ステップS14での停車時モータOFF制御の終了に続き、ブレーキコントローラ7からVDCブレーキ液圧アクチュエータ2へ出力されるホイールシリンダ圧指令値と、ホイールシリンダ圧センサ96からのWC圧センサ値に基づくホイールシリンダ圧実値と、の差がゼロを超えているか否かを判断する。YES(w/cyl圧指令値>w/cyl圧実値)の場合はステップS16へ進み、NO(w/cyl圧指令値≦w/cyl圧実値)の場合はステップS21へ進む。
ここで、ホイールシリンダ圧指令値は、ペダルストロークに基づいて出力される指令値であり、目標減速度に相当する。一方、ホイールシリンダ圧実値は、車両の減速度を発生する制動液圧センサ値であり、実減速度に相当する。
【0047】
ステップS16では、ステップS15でのw/cyl圧指令値>w/cyl圧実値であるとの判断に続き、ステップS13にて記憶されているブレーキリリース前の踏み込み量と、シフト位置センサ95からのシフト情報と、路面勾配センサ94からの路面勾配と、マスターシリンダ圧センサ24からのマスターシリンダ圧情報またはストロークセンサ3からのペダルストローク量情報と、を読み込み、ステップS17へ進む。
【0048】
ステップS17では、ステップS16でのブレーキリリース前の踏み込み量とシフト情報と路面勾配とマスタ圧またはストローク量の読み込みに続き、ブレーキリリース前の踏み込み量に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配を演算し、ステップS18へ進む。
ここで、ブレーキリリース前の踏み込み量に基づく昇圧勾配は、何ら制限することのない昇圧勾配(図5の昇圧特性C)に対して制限した勾配とするが、制限度合いを下記のように変更演算する。
ブレーキリリース前の踏み込み量が大きいほど車速発生時の昇圧量が大きくなることで、ペダルフィールを優先し、ブレーキリリース前の踏み込み量に基づく昇圧勾配を緩勾配とする(勾配制限大きい)。
一方、ブレーキリリース前の踏み込み量が小さいほど車速発生時の昇圧量が小さくなることで、ドライバの減速要求を優先し、ブレーキリリース前の踏み込み量に基づく昇圧勾配を急勾配とする(勾配制限小さい)。
【0049】
ステップS18では、ステップS17でのブレーキリリース前の踏み込み量に基づく昇圧勾配の演算に続き、路面勾配に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配を演算し、ステップS19へ進む。
ここで、路面勾配に基づく昇圧勾配は、何ら制限することのない昇圧勾配(図5の昇圧特性C)に対して制限した勾配とするが、制限度合いを下記のように変更演算する。
路面勾配が登坂勾配や降坂勾配であり大きな勾配を示すほど、ドライバの制動要求が早急であると判断し、昇圧特性を急勾配とする(勾配制限小さい)。
一方、路面勾配が平坦路に近いほど、ドライバの制動要求が早急でないと判断し、ペダルフィールを優先し、昇圧勾配を緩勾配とする(勾配制限大きい)。
この路面勾配に基づく昇圧勾配演算では、例えば、ブレーキリリース前の踏み込み量に基づく昇圧勾配を、急勾配側や緩勾配側に補正することで行う。
【0050】
ステップS19では、ステップS18での路面勾配に基づく昇圧勾配の演算に続き、シフト情報に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配を演算し、ステップS20へ進む。
ここで、シフト情報に基づく昇圧勾配は、何ら制限することのない昇圧勾配(図5の昇圧特性C)に対して制限した勾配とするが、制限度合いを下記のように変更演算する。
Dレンジでの登坂時には、ドライバの制動要求が早急でないと判断し、緩勾配とする(勾配制限大きい)。一方、NレンジやRレンジでの登坂時には、Dレンジよりも早急性が高いと判断し、急勾配とする(勾配制限小さい)。
Rレンジでの降坂時には、ドライバの制動要求が早急でないと判断し、緩勾配とする(勾配制限大きい)。一方、NレンジやDレンジでの降坂時には、Rレンジよりも早急性が高いと判断し、急勾配とする(勾配制限小さい)。
このシフト情報に基づく昇圧勾配演算では、例えば、ステップS18にて路面勾配に基づき急勾配側や緩勾配側に補正された昇圧勾配を、さらに、シフト情報に基づき急勾配側や緩勾配側に補正することで行う。
【0051】
ステップS20では、ステップS19でのステップS19でのシフト情報に基づく昇圧勾配の演算に続き、マスターシリンダ圧情報(マスターシリンダ圧またはストローク量)に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配を演算し、ステップS21へ進む。
ここで、マスターシリンダ圧情報としては、マスターシリンダ圧センサ24から直接取得するようにしても良いし、ストロークセンサ3からのペダルストローク量情報を代用するようにしても良い。なお、ストローク量情報で代用する場合は、ロスストローク以下のストローク量であるとき、マスターシリンダ圧を発生しないストローク領域とし、ロスストロークを超えるストローク量であるとき、マスターシリンダ圧を発生するストローク領域とする。
そして、マスターシリンダ圧情報に基づく昇圧勾配は、何ら制限することのない昇圧勾配(図5の昇圧特性C)に対して制限した勾配とするが、制限度合いを下記のように変更演算する。
昇圧前にマスターシリンダ圧の発生がある場合には、車速発生による昇圧時にマスターシリンダ圧が変動し、ペダル反力も変動する。このため、ペダルフィールを優先し、例えば、図5の昇圧特性Aに示すように、昇圧前のマスターシリンダ圧に基づく昇圧勾配Kaを緩勾配とする(勾配制限大きい)。
一方、昇圧前にマスターシリンダ圧の発生がない場合には、車速発生による昇圧時時にマスターシリンダ圧の変動がなく、ペダル反力も変動しない。このため、ドライバの減速要求を優先し、例えば、図5の昇圧特性Bに示すように、昇圧前のマスターシリンダ圧に基づく昇圧勾配Kbを急勾配とする(勾配制限小さい)。
【0052】
ステップS21では、ステップS20でのマスターシリンダ圧情報に基づく昇圧勾配の演算、あるいは、ステップS15でのw/cyl圧指令値≦w/cyl圧実値であるとの判断に続き、ホイールシリンダ圧の昇圧を実施し、リターンへ進む。
ここで、ホイールシリンダ圧の昇圧は、w/cyl圧指令値>w/cyl圧実値のとき、演算により制限された昇圧勾配に追従させて実施する。
【0053】
次に、作用を説明する。
実施例1のハイブリッド車のブレーキ制御装置における作用を、「回生協調ブレーキ制御作用」、「停車時モータOFF制御作用」、「停車時モータOFF制御終了時の課題」、「停車時モータOFF制御終了時の昇圧勾配抑制作用」に分けて説明する。
【0054】
[回生協調ブレーキ制御作用]
ハイブリッド車の場合、制動時においてエンジン車のように制動エネルギーを熱エネルギーとして全て消費するのではなく、制動エネルギーのうちできる限り多くのエネルギーを回生エネルギーとしてバッテリ回収することが燃費向上を図る上で必要である。以下、これを反映する回生協調ブレーキ制御作用を説明する。
【0055】
既存のコンベンショナルVDCの場合、ブレーキ操作時に負圧ブースタによる基本液圧分でドライバ要求の目標減速度を得るようにしている。これに対し、ブレーキ操作時に負圧ブースタによる基本液圧分を、目標減速度に達しないように、ドライバ要求の目標減速度からオフセットし、目標減速度の回生ギャップを設定する。このように、最大回生トルクによる回生ギャップを設定することによって、目標減速度の回生ギャップ分が、ドライバ要求の目標減速度に対して不足することになる。よって、最大回生トルク発生時には、ドライバ要求の目標減速度を、負圧ブースタ(基本液圧分)と回生ブレーキ(回生分)により達成し、回生機能を最大限に発揮するようにしている。
【0056】
しかし、例えば、車輪速条件やバッテリ充電容量条件等により、ドライバ要求の目標減速度に対し、基本液圧分で不足する目標減速度を回生分だけで補償しようとしても、補償することができない場合がある。そこで、ドライバ要求の目標減速度を、図6に示すように、負圧ブースタ(基本液圧分)と回生ブレーキ(回生分)の総和により達成するようにし、不足分をVDCブレーキ液圧アクチュエータ(昇圧分)により補償するようにしたのがVDCを利用した回生協調ブレーキシステムである。
【0057】
したがって、既存のコンベンショナルVDCに対し、負圧ブースタの特性変更と、VDCブレーキ液圧アクチュエータの特性変更と、ストロークセンサの追加を行うだけで、VDCを利用した廉価な回生協調ブレーキシステムを構成することができる。
すなわち、VDCを利用した回生協調ブレーキ制御システムは、目標減速度に対し、基本液圧分と回生分だけでは補償しきれないシーンが発生すると、VDCブレーキ液圧アクチュエータ2によって補償しきれない分の液圧を昇圧し、ドライバの要求減速度を達成する制御システムである。言い換えると、コンベンショナルVDCの安全機能を拡張(安全機能+回生協調機能)した制御システムである。
【0058】
この回生協調ブレーキ制御システムを搭載したハイブリッド車での走行中にブレーキ操作すると、図4のフローチャートにおいて、ステップS1→ステップS2→ステップS3→ステップS4→ステップS5→ステップS6→ステップS7へと進む。そして、ステップS7にて車両非停止状態であると判断されている間は、ステップS2→ステップS3→ステップS4→ステップS5→ステップS6→ステップS7へと進む流れが繰り返され、回生協調ブレーキ制御を実行する。そして、ステップS7にて車両停止状態であると判断されると、ステップS7からステップS8へと進み、回生協調ブレーキ制御を終了する。
【0059】
すなわち、ステップS4では、ブレーキペダルストロークセンサ値と、設定あるいは補正された目標減速度特性マップに基づき、ドライバ入力によるブレーキペダルストローク位置に対応する目標減速度が算出される。ステップS5では、そのときのMC圧センサ値に基づいて基本液圧分が決められ、そのときの車輪速センサ値やバッテリSOCに基づいて可能な限り最大となる回生分が決められる。そして、目標減速度から基本液圧分と回生分を差し引いた残りの減速度分を昇圧分により分担するように決められる。ステップS6では、基本液圧分に対する上乗せ目標制動力のうち、回生分に対応する回生分指令値が決定され、回生分指令(ゼロ指令を含む)がモータコントローラ8に出力される。同時に、基本液圧分に対する上乗せ目標制動力のうち、昇圧分に対応する昇圧分指令値が決定され、昇圧分指令(ゼロ指令を含む)がブレーキコントローラ7に出力される。
【0060】
したがって、回生協調ブレーキ制御時には、回生分指令を入力するモータコントローラ8において、回生分を目標回生制動力とし、走行用電動モータ5への回生電流値を決めるフィードフォワード制御により、回生トルク制御が行われる。そして、昇圧分指令を入力するブレーキコントローラ7において、昇圧分を目標差圧とし、VDCモータ21への回転上昇指令と、両M/Cカットソレノイドバルブ25,26への作動電流値を決めるフィードフォワード制御により、差圧コントロールを行う。この結果、制動エネルギーのうち、可能な限り最大となる回生エネルギー分を、車載バッテリに回収することができる。
【0061】
[停車時モータOFF制御作用]
上記回生協調ブレーキ制御では、ブレーキ操作による制動時、ポンプアップ昇圧のために常にVDCモータ21を作動しておく必要があることから、VDCモータ21の耐久性が問題となる。そこで、ブレーキ操作による制動時であっても一定の条件下ではVDCモータ21を停止させ、VDCモータ21の耐久性を確保する必要がある。以下、これを反映する停車時モータOFF制御作用を説明する。
【0062】
停車時モータOFF制御は、図4のステップS7にて車両停止判断されるとVDCモータ21の駆動を停止して開始され、図4のステップS10にて車輪速が発生すると終了する。つまり、車両停止中、VDCモータ21の駆動停止を継続する制御である。
【0063】
停車時モータOFF制御の一例を説明する。車速が0km/hになると、モータ停止フラグがOFFからONに切り替えられ、VDCモータ21のモータ回転数が低下を開始する。そして、VDCモータ21のモータ回転数がゼロ(モータ停止)になり、ブレーキペダルの踏み込み量を保っているとすると、その間は、マスターシリンダ圧に一定のバルブ差圧が加えられたホイールシリンダ圧を維持している。
【0064】
そして、ブレーキペダルの踏み増し操作を開始すると、マスターシリンダ圧は、踏み増し操作に追従して上昇するが、ホイールシリンダ圧は、VDCモータ21の停止によりポンプアップ昇圧できないことで、踏み増し操作開始時のホイールシリンダ圧をそのまま維持する。つまり、踏み増し時には、カットバルブ25,26への指示圧(目標差圧)を落とし、マスターシリンダ圧の上昇に反比例してバルブ差圧を低下させ、上昇するマスターシリンダ圧に低下するバルブ差圧を加えてホイールシリンダ圧を維持する。そして、踏み増し位置でペダル踏み込み量を維持すると、上昇位置で一定のマスターシリンダ圧と低下位置で一定のバルブ差圧を加えてホイールシリンダ圧を維持する。さらに、ブレーキペダルの踏み戻し操作を開始すると、バルブ差圧をそのまま維持することで、マスターシリンダ圧とホイールシリンダ圧は、踏み戻し操作に追従して下降する。したがって、ペダル踏み込み量(マスターシリンダ圧)を維持すると、ホイールシリンダ圧とバルブ差圧が低下する。
【0065】
そして、ブレーキペダルの抜き操作を開始すると、バルブ差圧をそのまま維持することで、マスターシリンダ圧とホイールシリンダ圧は、抜き操作に追従して低下し、抜き位置でペダル踏み込み量を維持すると、低下位置で一定のマスターシリンダ圧と一定のバルブ差圧を加えてホイールシリンダ圧を維持する。さらに、ブレーキペダルの抜き戻し操作を開始すると、マスターシリンダ圧は上昇し、バルブ差圧は低下することで、ホイールシリンダ圧を維持する。したがって、ペダル踏み込み量(マスターシリンダ圧)を維持すると、ホイールシリンダ圧とバルブ差圧が低下する。
【0066】
そして、再度、ブレーキペダルの踏み増し操作を開始すると、マスターシリンダ圧は、踏み増し操作に追従して上昇し、バルブ差圧がゼロまで低下することで、マスターシリンダ圧がホイールシリンダ圧と一致する。つまり、マスターシリンダ圧とホイールシリンダ圧の差圧が無くなり、マスターシリンダ圧の上昇に追従してホイールシリンダ圧が上昇し、それ以降は、マスターシリンダ圧の維持及び低下に追従してホイールシリンダ圧が維持及び低下する。その後、マスターシリンダ圧とホイールシリンダ圧のバルブ差圧の全てがゼロになる。
【0067】
このように、停車時モータOFF制御では、ドライバがブレーキペダルに対して踏み増し方向に操作するときは、マスターシリンダ圧とホイールシリンダ圧の目標差圧を維持しないで、目標差圧を減少させる制御を行う。
なぜなら、第一に、ペダル踏み増し方向に操作するとき、マスターシリンダ圧とホイールシリンダ圧の目標差圧を維持すると、VDCモータ21を作動し、ホイールシリンダ圧をマスターシリンダ圧に追従させてポンプアップ昇圧させる必要がある。第二に、マスターシリンダ圧とホイールシリンダ圧の目標差圧を維持するように、カットバルブ25,26を閉じ状態としてペダル踏み込み操作を行うと、高いペダル反力により、所謂板踏み感になってしまう。
したがって、停車時モータOFF制御中にドライバがブレーキペダルに対して踏み増し方向に操作を行った場合には、マスターシリンダ圧とホイールシリンダ圧の間で、目標差圧のある状態から目標差圧が無くなる状態へと遷移することになる。
【0068】
[停車時モータOFF制御終了時の課題]
上記停車時モータOFF制御中に目標差圧が低い状態とされ、車速発生により停車時モータOFF制御を終了し、差圧コントロールとポンプアップ昇圧によりホイールシリンダ圧を立ち上げる比較例の課題を、図7に基づき説明する。
【0069】
図7において、時刻t1は、車速及び減速度がゼロになり停車時モータOFF制御を開始する時刻とする。時刻t2は、時刻t1からの停車時モータOFF制御中におけるペダル踏み増し操作の終了時刻とする。時刻t3は、時刻t2からのペダル戻し操作(ペダルリリース操作)により車速が発生し、停車時モータOFF制御を終了する時刻とする。
【0070】
時刻t1から時刻t2までの間は、停車時モータOFF制御中におけるペダル踏み増し操作に伴い、マスターシリンダ圧は上昇するが、目標差圧は低下し、一定のホイールシリンダ圧を保つ。なお、時刻t1から時刻t2までの間のペダル反力は、マスターシリンダ圧の上昇に伴い上昇する。
【0071】
一方、時刻t2から時刻t3までの間は、停車時モータOFF制御中におけるペダル戻し操作に伴い、マスターシリンダ圧とホイールシリンダ圧が低下し、目標差圧は低下後の差圧が保たれる。なお、時刻t2から時刻t3までの間のペダル反力は、マスターシリンダ圧の低下に伴い低下する。
【0072】
そして、時刻t3にて車速の発生により停車時モータOFF制御が終了すると、低下している目標差圧を一気に立ち上げる差圧弁コントロールと、ポンプモータの作動再開によるポンプアップ昇圧が行われる。したがって、ポンプモータの作動再開直後、図7の矢印Dに示すように、ホイールシリンダ圧が急勾配にて上昇し、ポンプアップ昇圧作動に伴うブレーキ液の吸込みにより、図7の矢印Eに示すように、マスターシリンダ圧が急勾配にて低下する。
【0073】
このように、ホイールシリンダ圧が急勾配にて上昇するため、図7の矢印Fに示すように、車速が時刻t3から加速から減速へと変動し、図7の矢印Gに示すように、減速度が時刻t3から加速側から減速側へ変動し、ドライバに減速度違和感を与える。
加えて、マスターシリンダ圧が急勾配にて低下するため、図7の矢印Hに示すように、ペダル反力が時刻t3から急低下し、ドライバにペダルフィール違和感を与える。
【0074】
[停車時モータOFF制御終了時の昇圧勾配抑制作用]
上記のように、停車時モータOFF制御中に踏み増し操作を行った場合、車速発生時に減速度違和感やペダルフィール違和感を発生する。このような減速度違和感やペダルフィール違和感を緩和することが必要である。以下、図8及び図9に基づき、これを反映する停車時モータOFF制御終了時の昇圧勾配抑制作用を説明する。
【0075】
まず、停車時モータOFF制御の実施が開始され、マスターシリンダ圧が維持または上昇している間は、図4のフローチャートにおいて、ステップS9→ステップS10→ステップS11→ステップS12へと進む流れが繰り返される。そして、ブレーキペダルを踏み戻し操作することによりマスターシリンダ圧が低下を開始すると、ステップS12からステップS13へ進む。ステップS13では、ストロークセンサ3からのペダルストローク量情報が読み込まれ、読み込まれたストローク量がブレーキリリース前の踏み込み量として記憶される。
【0076】
その後、ステップS10にて車輪速が発生したと判断されると、図4のフローチャートにおいて、ステップS10からステップS14へと進み停車時モータOFF制御を終了し、ステップS14からステップS15へと進む。ステップS15では、ブレーキコントローラ7からVDCブレーキ液圧アクチュエータ2へ出力されるw/cyl圧指令値が、ホイールシリンダ圧センサ96からのWC圧センサ値に基づくw/cyl圧実値を超えているか否かが判断される。w/cyl圧指令値≦w/cyl圧実値の場合は、目標減速度と実減速度が一致している、あるいは、実減速度が目標減速度より大きくホイールシリンダ圧の昇圧を必要としないことからステップS21へ進む。一方、w/cyl圧指令値>w/cyl圧実値の場合は、実減速度が目標減速度より小さく、実減速度を目標減速度に一致させるようにホイールシリンダ圧の昇圧を必要とすることから、ステップS16以降へ進む。
【0077】
ステップS15にて、w/cyl圧指令値>w/cyl圧実値と判断された場合、図4のフローチャートにおいて、ステップS15からステップS16→ステップS17→ステップS18→ステップS19→ステップS20→ステップS21→リターンへと進む。ステップS16では、昇圧勾配の制限を変更する情報であるブレーキリリース前の踏み込み量とシフト情報と路面勾配とマスターシリンダ圧情報とを読み込む。ステップS17では、ブレーキリリース前の踏み込み量に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配が演算される。ステップS18では、路面勾配に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配が演算される。ステップS19では、シフト情報に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配が演算される。ステップS20では、マスターシリンダ圧情報に基づきホイールシリンダ圧の昇圧特性の傾きである昇圧勾配が演算される。
【0078】
すなわち、停車時モータOFF制御の終了時に、ホイールシリンダ圧の低下によりw/cyl圧指令値>w/cyl圧実値と判断された場合、昇圧勾配制限部であるステップS15〜ステップS20において、昇圧勾配が制限される。昇圧勾配の制限とは、ホイールシリンダ圧を上昇させるVDCブレーキ液圧アクチュエータ2への昇圧指令に対し、昇圧特性の昇圧勾配(特性の傾き、ゲイン)を、制限無しのときの昇圧勾配に比べて緩勾配になるように制限することをいう。
【0079】
したがって、図8の時刻t3において車速の発生により停車時モータOFF制御が終了すると、低下している目標差圧を徐々に立ち上げる差圧弁コントロールと、VDCモータ21の回転数を徐々に上げるポンプアップ昇圧が行われる。このVDCモータ21の作動再開直後、図8の矢印D’に示すように、ホイールシリンダ圧が緩勾配にて上昇する。そして、緩やかなポンプアップ昇圧によりブレーキ液の急な吸込みが抑えられ、図8の矢印E’に示すように、マスターシリンダ圧が緩勾配にて低下する。
【0080】
このように、ホイールシリンダ圧が緩勾配にて上昇するため、図8の矢印F’に示すように、車速が時刻t3から加速から緩やかな低下勾配で減速へと変動する。そして、図8の矢印G’に示すように、減速度が時刻t3から加速側から緩やかな低下勾配で減速側へ変動する。この結果、ドライバに与える減速度違和感が抑えられる。加えて、マスターシリンダ圧が緩勾配にて低下するため、図8の矢印H’に示すように、ペダル反力が時刻t3から滑らかな勾配にて低下し、ドライバに与えるペダルフィール違和感が抑えられる。
【0081】
次に、昇圧勾配の制限度合いを変更する昇圧勾配変更作用を、(a)ブレーキリリース前の踏み込み量に基づく昇圧勾配変更作用と、(b)路面勾配に基づく昇圧勾配変更作用と、(c)シフト情報に基づく昇圧勾配変更作用と、(d)マスターシリンダ圧情報に基づく昇圧勾配変更作用と、に分けて説明する。
【0082】
(a)ブレーキリリース前の踏み込み量に基づく昇圧勾配変更作用
ブレーキリリース前の踏み込み量に基づく昇圧勾配は、ブレーキリリース前の踏み込み量が大きいほど、勾配制限を大きくとって緩勾配とされる。ブレーキリリース前の踏み込み量が大きいときには、昇圧勾配が小さくされる。また、ブレーキリリース前の踏み込み量が小さいときには、昇圧勾配が大きくされる。
これは、ブレーキリリース前の踏み込み量が大きいときには、図8に示すように、目標差圧を減じる量が大きくなり、車速発生時の昇圧量が大きくなる。一方、ブレーキリリース前の踏み込み量が小さいときには、目標差圧を減じる量が小さくなり、車速発生時の昇圧量が小さくなることによる。
したがって、ブレーキリリース前の踏み込み量が大きいときには、昇圧勾配が小さくすることで、ペダルフィールが優先され、減速度違和感やペダルフィール違和感が小さく抑えられる。一方、ブレーキリリース前の踏み込み量が小さいときには、昇圧勾配を大きくすることで、ドライバの減速要求が優先され、減速度違和感やペダルフィール違和感を抑えながらも、要求される減速度の早期発生が確保される。
【0083】
(b)路面勾配に基づく昇圧勾配変更作用
路面勾配に基づく昇圧勾配は、路面勾配が大きな勾配を示すほど、勾配制限を小さくとって急勾配とされる。一方、路面勾配が平坦路に近いほど、勾配制限を大きくとって緩勾配とされる。
すなわち、登坂路停車の場合、制動力の低下により車両のずり下がりが発生するが、このずり下がりによる車速発生時にホイールシリンダ圧の昇圧が遅れると、車両のずり下がりを許してしまうことになる。降坂路の場合、制動力の低下により車両の押し出しが発生するが、この車両の押し出しによる車速発生時にホイールシリンダ圧の昇圧が遅れると、車両の押し出しを許してしまうことになる。
したがって、登坂路や降坂路での坂道停車時であって、路面勾配が大きな勾配を示すときには、ドライバの制動要求が早急であるとの判断に基づき、路面勾配に基づく昇圧勾配を急勾配とする。これにより、登坂路停車時には、車両のずり下がりが防止され、降坂路停車時には、車両の押し出しが防止される。つまり、坂道停車時には、早急なドライバの制動要求に応え、ホイールシリンダ圧の昇圧が遅れることがない。
一方、平坦路停車時であって、路面勾配が平坦路に近いときには、ドライバの制動要求が早急でなく、ペダルフィールの優先状況であるとの判断に基づき、路面勾配に基づく昇圧勾配を緩勾配とすることで、減速度違和感やペダルフィール違和感が小さく抑えられる。
【0084】
(c)シフト情報に基づく昇圧勾配変更作用
シフト情報に基づく昇圧勾配は、登坂時と降坂時で分けて設定する。
まず、Dレンジでの登坂時には、ドライバの制動要求が早急でないと判断し、勾配制限を大きくとって緩勾配とする。一方、NレンジやRレンジでの登坂時には、Dレンジよりも早急性が高いと判断し、勾配制限を小さくとって急勾配とする。
また、Rレンジでの降坂時には、ドライバの制動要求が早急でないと判断し、勾配制限を大きくとって緩勾配とする。一方、NレンジやDレンジでの降坂時には、Rレンジよりも早急性が高いと判断し、勾配制限を小さくとって急勾配とする。
このように、シフト情報に基づいて昇圧勾配を決めることで、車両が動いて車速が発生したことを検知した際、路面勾配とシフトの組み合わせによるドライバ制動要求の早急性にあわせた制動力を提供することができる。
例えば、登坂路停車時に選択されているシフト位置がDレンジであれば、車両のずり下がりの進行方向(後退方向)に対して反対方向である車両の前進方向に駆動力が発生する。このため、その状態でのNレンジやRレンジ時よりも早急性が高くないと判断する。Nレンジ時やRレンジ時には、車両のずり下がりに対する反力が発生しないため、Dレンジ時よりも早急性が高いと判断し、昇圧勾配を急にすることで、ドライバの制動力要求の早急性に合わせた減速度を提供することができる。
逆に、降坂路停車時に選択されているシフト位置がRレンジであれば、車両のずり下がりの進行方向(前進方向)に対して反対方向である車両の後退方向に駆動力が発生している。このため、登坂路停車時のDレンジと同じように早急性は高くないと判断する。Nレンジ時やDレンジ時には、車両のずり下がりに対する反力が発生しないため、Rレンジ時よりも早急性が高いと判断し、昇圧勾配を急にする。
さらに、ブレーキリリース前の踏み込み量を考慮に加え、ペダルフィール優先とするシーンか、減速度を早急に発生させるシーンか、どうかを判断する。そして、減速度を早急に発生させるシーンである場合は、リリース前の踏み込み量が大きかったとしても、VDCブレーキ液圧アクチュエータ2の上昇勾配を急にすることで、ドライバによる制動要求の早急性に合わせた減速度を提供することができる。
【0085】
(d)マスターシリンダ圧情報に基づく昇圧勾配変更作用
マスターシリンダ圧情報に基づく昇圧勾配は、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配よりも緩勾配とされる。例えば、昇圧前にマスターシリンダ圧の発生がある場合には、図5の昇圧特性Aに示すように、昇圧勾配Kaが小さくされる。また、昇圧前にマスターシリンダ圧の発生がない場合には、図5の昇圧特性Bに示すように、昇圧勾配Kb(>Ka)が大きくされる。
この理由を説明する。昇圧前にマスターシリンダ圧の発生がないときは、大気圧であるリザーバ14とマスターシリンダ13の間のリリーフポートが開いている。したがって、マスターシリンダ圧の発生がない状態でVDCブレーキ液圧アクチュエータ2が作動すると、リザーバ14からブレーキ液を供給するため、マスターシリンダ圧は変動しない。
一方、マスターシリンダ圧の発生があるときは、ブレーキペダル11の踏み込み量が進むことで、リザーバ14とマスターシリンダ13の間のリリーフポートが閉じている。したがって、マスターシリンダ圧の発生がある状態でVDCブレーキ液圧アクチュエータ2が作動すると、密閉されたマスターシリンダ13からブレーキ液を供給するため、マスターシリンダ圧が低下し、これに伴いブレーキペダル反力も低下する。
このため、実施例1では、昇圧前におけるマスターシリンダ圧の発生有無により、ペダルフィールを優先する昇圧勾配制御と、ドライバの減速度要求を優先する昇圧勾配制御とに切り分けた。
したがって、図8の矢印E’に示すように、昇圧前にマスターシリンダ圧の発生があるときには、図8の矢印D’に示すように、昇圧勾配Kaが小さくする。このため、ペダルフィールが優先され、図8の矢印F’,G’,H’に示すように、減速度違和感やペダルフィール違和感が小さく抑えられる。
一方、図9の矢印E”に示すように、昇圧前にマスターシリンダ圧の発生がないときには、図9の矢印D”に示すように、昇圧勾配Kbを大きくする。このため、ドライバの減速要求が優先され、図9の矢印F”,G”,H”に示すように、減速度違和感やペダルフィール違和感を抑えながらも、要求される減速度の早期発生が確保される。
【0086】
次に、効果を説明する。
実施例1のハイブリッド車のブレーキ制御装置にあっては、下記に列挙する効果を得ることができる。
【0087】
(1) ブレーキ操作に応じたマスターシリンダ圧を発生するマスターシリンダ13と、
前後輪の各輪に設けられ、ホイールシリンダ圧に応じて各輪に液圧制動力を与えるホイールシリンダ4FL,4FR,4RL,4RRと、
前記マスターシリンダ13と前記ホイールシリンダ4FL,4FR,4RL,4RRとの間に介装され、ポンプモータ(VDCモータ21)により駆動する液圧ポンプ22,22と、ホイールシリンダ圧とマスターシリンダ圧の差圧を制御する差圧弁(第1M/Cカットソレノイドバルブ25、第2M/Cカットソレノイドバルブ26)と、を有するブレーキ液圧アクチュエータ(VDCブレーキ液圧アクチュエータ2)と、
ブレーキ操作により車両が停止するとき、前記ポンプモータ(VDCモータ21)を停止し、車両停止中、前記ポンプモータ(VDCモータ21)の停止状態を維持したままとする停車時モータオフ制御部(ステップS9)と、
車両停止状態からの車速発生により前記停車時モータオフ制御が終了すると、前記ポンプモータ(VDCモータ21)の作動再開に伴うホイールシリンダ圧の昇圧勾配を制限により緩勾配にすると共に、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配より緩やかにする昇圧勾配制限部(ステップS15〜ステップS20)と、
を備える。
このため、車両停止状態でのポンプモータ(VDCモータ21)の耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成することができる。加えて、昇圧前にマスターシリンダ圧の発生があるとき、ペダルフィール違和感や減速度違和感を抑えることができ、昇圧前にマスターシリンダ圧の発生がないとき、ドライバの減速度要求に応えることができる。
【0088】
(2) 前記昇圧勾配制限部(ステップS15〜ステップS20)は、昇圧前にマスターシリンダ圧が発生したかどうかの情報を、ブレーキペダル11のストローク量により取得する。
このため、上記(1)の効果に加え、昇圧勾配制御の切り分け理由となっているリザーバ14とマスターシリンダ13の間のリリーフポートが閉じているか開いているかを精度良く検知することができる。
【0089】
(3) 前記昇圧勾配制限部(ステップS15〜ステップS20)は、路面勾配が大きな勾配を示すほど、昇圧勾配を急勾配側に制限変更する(ステップS18)。
このため、上記(1)または(2)の効果に加え、路面勾配が大きな勾配を示すとき、車両のずり下がりや車両の押し出しを防止することができる。
【実施例2】
【0090】
実施例2は、マスターシリンダ圧情報に基づいて昇圧勾配を演算する際、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、マスターシリンダ圧の高さに応じて変更するようにした例である。
【0091】
まず、図4のフローチャートは、実施例2においても同様とするが、ステップS20の演算内容を異ならせる。
【0092】
実施例2のステップS20では、マスターシリンダ圧情報に基づきホイールシリンダ圧の昇圧特性の傾きであるゲイン(昇圧勾配)を、昇圧前のマスターシリンダ圧がある場合には、マスターシリンダ圧が高いほど大きくする。
【0093】
すなわち、昇圧前にマスターシリンダ圧の発生がない場合には、図10に示すように、実施例1と同様に、ドライバの減速要求を優先し、ゲインG1(=昇圧勾配Kb)を大きな値とする。しかし、昇圧前にマスターシリンダ圧の発生がある場合には、実施例1のようにゲインG2(=昇圧勾配Ka)を一定値により与えるのではなく、図11に示すように、マスターシリンダ圧が高くなるほど大きくなる値によるゲインGVとする。
【0094】
この理由を説明すると、マスターシリンダ圧の発生があるときは、ブレーキペダル11の踏み込み量が進むことで、リザーバ14とマスターシリンダ13の間のリリーフポートが閉じている。したがって、マスターシリンダ圧の発生がある状態でVDCブレーキ液圧アクチュエータ2が作動すると、密閉されたマスターシリンダ13からブレーキ液を供給するため、マスターシリンダ圧が低下し、これに伴いブレーキペダル反力も低下する。つまり、ホイールシリンダ圧を上昇させるのに、密閉されたマスターシリンダ13からのブレーキ液をどれだけ消費するかが、ブレーキペダル反力の低下幅に影響する。
【0095】
そこで、ホイールシリンダ圧と液消費量の関係をみると、図11に示すように、ホイールシリンダ圧を低圧側と高圧側とで同じ幅xMPaにより変動させたときの液消費量の大きさは、低圧側での液消費量aが、高圧側での液消費量bよりも大きくなる。
このことは、マスターシリンダ圧が低圧側であるほど、同じ上昇幅でホイールシリンダ圧を昇圧したときの液消費量が大きく、これに伴うブレーキペダル反力の低下幅が大きくなることを意味する。一方、マスターシリンダ圧が高圧側であるほど、同じ上昇幅でホイールシリンダ圧を昇圧したときの液消費量が小さく、これに伴うブレーキペダル反力の低下幅が小さくなることを意味する。
【0096】
このような液消費量関係に適合させるため、実施例2では、図10に示すように、マスターシリンダ圧が高くなるほど大きくなる値によるゲインGVとする。したがって、昇圧前にマスターシリンダ圧の発生があるときには、単にペダルフィールが優先されるばかりでなく、昇圧前のマスターシリンダ圧の高さにかかわらず、減速度違和感やペダルフィール違和感が小さく抑えられる。
なお、他の構成は、実施例1と同様であるし、他の作用は、実施例1と同様であるので、図示並びに説明を省略する。
【0097】
次に、効果を説明する。
実施例2のハイブリッド車のブレーキ制御装置にあっては、下記の効果を得ることができる。
【0098】
(4) 前記昇圧勾配制限部(ステップS15〜ステップS20)は、昇圧前にマスターシリンダ圧の発生がある場合、マスターシリンダ圧が高いほど、昇圧勾配を急勾配側に制限変更する(ステップS20)。
このため、実施例1の(1)〜(3)の効果に加え、昇圧前にマスターシリンダ圧の発生があるとき、昇圧前のマスターシリンダ圧の高さにかかわらず、減速度違和感やペダルフィール違和感を小さく抑えることができる。
【0099】
以上、本発明の車両のブレーキ制御装置を実施例1及び実施例2に基づき説明してきたが、具体的な構成については、これらの実施例に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0100】
実施例1,2では、車速発生により停車時モータOFF制御が終了する時、ブレーキリリース前の踏み込み量に基づく昇圧勾配と、路面勾配に基づく昇圧勾配と、シフト情報に基づく昇圧勾配と、マスターシリンダ圧情報に基づく昇圧勾配と、を演算により求める例を示した。しかし、これらの路面勾配(=ゲイン)は、上昇レイトリミッタを変更する例としても良いし、また、シーン別に設定したマップで代用してもよい。なお、シーン別とは、2段階や3段階といった有段な区別でなくても、例えば、マップ補完により無段階に区別するようにしても良い。
【0101】
実施例1,2では、昇圧勾配制限部として、w/cyl圧指令値がw/cyl圧実値より小さいと判断されたとき、ブレーキリリース前の踏み込み量・路面勾配・シフト情報・マスターシリンダ圧情報に基づき制限する例を示した。しかし、車速発生時、目標減速度と実減速度に差異が発生し、ブレーキ液圧アクチュエータにより昇圧が必要なとき、マスターシリンダ圧情報のみにより昇圧勾配の制限を変更するような例としても良い。
【0102】
実施例1では、昇圧前のマスターシリンダ圧情報を、マスターシリンダ圧が発生しているか発生していないかにより分け、それぞれについて昇圧勾配Ka,Kb(ゲインG1,G2)を与える例を示した。実施例2では、マスターシリンダ圧が発生しているとき、マスターシリンダ圧の高さに応じて曲線特性により変化するゲインGVにより与える例を示した。しかし、マスターシリンダ圧が発生しているとき、2段階や3段階といった有段なゲインにより与える例としても良い。
【0103】
実施例1,2では、ブレーキ液圧アクチュエータとして、図2に示すVDCブレーキ液圧アクチュエータ2を利用する例を示した。しかし、ブレーキ液圧アクチュエータとしては、ポンプモータにより駆動する液圧ポンプと、ホイールシリンダ圧とマスターシリンダ圧の差圧を制御する差圧弁と、を有するものであれば良い。
【0104】
実施例1,2では、本発明のブレーキ制御装置を、前輪駆動のハイブリッド車へ適用した例を示した。しかし、後輪駆動のハイブリッド車、電気自動車、燃料電池車、等の電動車両であり、液圧制動力と回生制動力による回生協調ブレーキ制御を行うものであれば、本発明のブレーキ制御装置を適用することができる。さらに、エンジン車であり、停車時モータOFF制御を採用したブレーキ液圧アクチュエータを用い、液圧制動力のみによってブレーキ制御を行うものであっても本発明のブレーキ制御装置を適用することができる。
【符号の説明】
【0105】
1 ブレーキ液圧発生装置
13 マスターシリンダ
14 リザーバ
2 VDCブレーキ液圧アクチュエータ(ブレーキ液圧アクチュエータ)
21 VDCモータ(ポンプモータ)
22 液圧ポンプ
24 マスターシリンダ圧センサ
25 第1M/Cカットソレノイドバルブ(差圧弁)
26 第2M/Cカットソレノイドバルブ(差圧弁)
3 ストロークセンサ
4FL 左前輪ホイールシリンダ
4FR 右前輪ホイールシリンダ
4RL 左後輪ホイールシリンダ
4RR 右後輪ホイールシリンダ
5 走行用電動モータ
61 プライマリ液圧管
62 セカンダリ液圧管
63 左前輪液圧管
64 右前輪液圧管
65 左後輪液圧管
66 右後輪液圧管
7 ブレーキコントローラ
8 モータコントローラ
9 統合コントローラ
9a 目標減速度算出部
9b 回生協調ブレーキ制御部
91 バッテリコントローラ
92 車輪速センサ
93 ブレーキスイッチ
94 路面勾配センサ
95 シフト位置センサ
96 ホイールシリンダ圧センサ
【特許請求の範囲】
【請求項1】
ブレーキ操作に応じたマスターシリンダ圧を発生するマスターシリンダと、
前後輪の各輪に設けられ、ホイールシリンダ圧に応じて各輪に液圧制動力を与えるホイールシリンダと、
前記マスターシリンダと前記ホイールシリンダとの間に介装され、ポンプモータにより駆動する液圧ポンプと、ホイールシリンダ圧とマスターシリンダ圧の差圧を制御する差圧弁と、を有するブレーキ液圧アクチュエータと、
ブレーキ操作により車両が停止するとき、前記ポンプモータを停止し、車両停止中、前記ポンプモータの停止状態を維持したままとする停車時モータオフ制御部と、
車両停止状態からの車速発生により前記停車時モータオフ制御が終了すると、前記ポンプモータの作動再開に伴うホイールシリンダ圧の昇圧勾配を制限により緩勾配にすると共に、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配より緩やかにする昇圧勾配制限部と、
を備えることを特徴とする車両のブレーキ制御装置。
【請求項2】
請求項1に記載された車両のブレーキ制御装置において、
前記昇圧勾配制限部は、昇圧前にマスターシリンダ圧の発生がある場合、マスターシリンダ圧が高いほど、昇圧勾配を急勾配側に制限変更する
ことを特徴とする車両のブレーキ制御装置。
【請求項3】
請求項1または請求項2に記載された車両のブレーキ制御装置において、
前記昇圧勾配制限部は、昇圧前にマスターシリンダ圧が発生したかどうかの情報を、ブレーキペダルのストローク量により取得する
ことを特徴とする車両のブレーキ制御装置。
【請求項4】
請求項1から請求項3までの何れか1項に記載された車両のブレーキ制御装置において、
前記昇圧勾配制限部は、路面勾配が大きな勾配を示すほど、昇圧勾配を急勾配側に制限変更する
ことを特徴とする車両のブレーキ制御装置。
【請求項1】
ブレーキ操作に応じたマスターシリンダ圧を発生するマスターシリンダと、
前後輪の各輪に設けられ、ホイールシリンダ圧に応じて各輪に液圧制動力を与えるホイールシリンダと、
前記マスターシリンダと前記ホイールシリンダとの間に介装され、ポンプモータにより駆動する液圧ポンプと、ホイールシリンダ圧とマスターシリンダ圧の差圧を制御する差圧弁と、を有するブレーキ液圧アクチュエータと、
ブレーキ操作により車両が停止するとき、前記ポンプモータを停止し、車両停止中、前記ポンプモータの停止状態を維持したままとする停車時モータオフ制御部と、
車両停止状態からの車速発生により前記停車時モータオフ制御が終了すると、前記ポンプモータの作動再開に伴うホイールシリンダ圧の昇圧勾配を制限により緩勾配にすると共に、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配より緩やかにする昇圧勾配制限部と、
を備えることを特徴とする車両のブレーキ制御装置。
【請求項2】
請求項1に記載された車両のブレーキ制御装置において、
前記昇圧勾配制限部は、昇圧前にマスターシリンダ圧の発生がある場合、マスターシリンダ圧が高いほど、昇圧勾配を急勾配側に制限変更する
ことを特徴とする車両のブレーキ制御装置。
【請求項3】
請求項1または請求項2に記載された車両のブレーキ制御装置において、
前記昇圧勾配制限部は、昇圧前にマスターシリンダ圧が発生したかどうかの情報を、ブレーキペダルのストローク量により取得する
ことを特徴とする車両のブレーキ制御装置。
【請求項4】
請求項1から請求項3までの何れか1項に記載された車両のブレーキ制御装置において、
前記昇圧勾配制限部は、路面勾配が大きな勾配を示すほど、昇圧勾配を急勾配側に制限変更する
ことを特徴とする車両のブレーキ制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−32142(P2013−32142A)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願番号】特願2012−142256(P2012−142256)
【出願日】平成24年6月25日(2012.6.25)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願日】平成24年6月25日(2012.6.25)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]