
車両のブレーキ制御装置
【課題】 不感帯幅の拡大にともなうブレーキ操作フィーリングの低下を抑制しつつリニア制御弁の耐久性を向上させる。
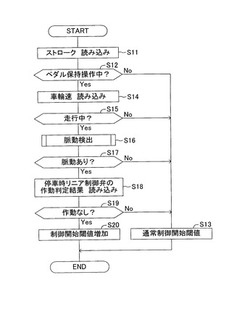
【解決手段】 ブレーキECU100は、停車中であってブレーキペダルが保持操作状態であるときにリニア制御弁の作動量が正常範囲か否かを判定しておく。そして、ブレーキペダルが保持操作状態であり(S12:Yes)、車両が走行中であり(S15:Yes)、液圧の脈動が検出されているときに(S17:Yes)、リニア制御弁の作動判定結果が正常である場合(S19:Yes)に、制御開始閾値を通常制御開始閾値よりも大きくする(S20)。
【解決手段】 ブレーキECU100は、停車中であってブレーキペダルが保持操作状態であるときにリニア制御弁の作動量が正常範囲か否かを判定しておく。そして、ブレーキペダルが保持操作状態であり(S12:Yes)、車両が走行中であり(S15:Yes)、液圧の脈動が検出されているときに(S17:Yes)、リニア制御弁の作動判定結果が正常である場合(S19:Yes)に、制御開始閾値を通常制御開始閾値よりも大きくする(S20)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ホイールシリンダの液圧をリニア制御弁により目標液圧に制御する車両のブレーキ制御装置に関する。
【背景技術】
【0002】
一般に、この種のブレーキ制御装置においては、ホイールシリンダの目標液圧と、実際に検出した液圧である実液圧との偏差が不感帯幅を超えた場合に、リニア制御弁(増圧側リニア弁あるいは減圧側リニア弁)を駆動することにより、ホイールシリンダの液圧を目標液圧に追従するように制御する。ドラムブレーキにおいては、ドラムの回転中心軸が車輪の回転中心軸に対して偏心した状態でドラムが取り付けられている場合や、ドラムの真円度が悪い場合には、ドラムと摩擦係合部材との間に作用する力が、ドラムの回転に伴って周期的に変動する。このため、ホイールシリンダの液圧が周期的に変動し、これに応答してリニア制御弁の作動が繰り返される。そこで、特許文献1に提案されたブレーキ装置においては、ドラムブレーキ制御用の不感帯幅を、ディスクブレーキ制御用の不感帯幅よりも広く設定することにより、ホイールシリンダの液圧の脈動に起因する制御ハンチングを抑制する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−28975号公報
【発明の概要】
【0004】
上記のブレーキ装置においては、単に、ドラムブレーキであるということ、あるいは、液圧の変動が大きいということだけで、不感帯幅(制御開始閾値)を大きくするものである。このため、脈動により実際にリニア制御弁が過度に作動している状態(開閉動作を繰り返す状態)であるか否かについては適切に判断されていない。従って、リニア制御弁が過度に作動しない状態であっても、不感帯幅が大きく設定されてしまうことがあり、その場合には、ブレーキ操作フィーリングに悪影響を及ぼしてしまう。また、リニア弁制御が過度に作動している状態であっても適正な不感帯幅を設定できないこともあり、その場合には、リニア制御弁の耐久性(耐久寿命)を低下させてしまう。
【0005】
本発明は、上記問題を解決するためになされたものであり、リニア制御弁が過度に作動する状態を適切に捉えて、不感帯幅の拡大にともなうブレーキ操作フィーリングの低下を抑制しつつリニア制御弁の耐久性を向上させることを目的とする。
【0006】
上記課題を解決する本発明の特徴は、作動液の液圧を受けて車輪に制動力を与えるホイールシリンダ(42)と、ブレーキ操作量を検出するブレーキ操作量検出手段(104)と、前記ホイールシリンダに伝達される液圧を調整するリニア制御弁(67A,67B)と、前記ホイールシリンダに伝達される液圧を検出する液圧検出手段(103)と、前記液圧検出手段により検出された液圧である検出液圧と目標液圧との偏差の絶対値が制御開始閾値を超えたとき、前記検出液圧が前記目標液圧に近づくように前記リニア制御弁の駆動制御を開始する液圧制御手段(100)とを備えた車両のブレーキ制御装置において、
前記ホイールシリンダの液圧が脈動していることを検出する脈動検出手段(S31〜S37,S101〜S107)と、車両が停車中であって前記ブレーキ操作量あるいは前記目標液圧が一定に維持されるブレーキ保持状態となるときに前記リニア制御弁の作動量が正常範囲内であるということを条件として、車両が走行中であって前記ブレーキ保持状態となるときに前記液圧検出手段により液圧の脈動が検出されている場合に、前記制御開始閾値を、前記液圧の脈動が検出されていない場合における制御開始閾値を表す通常制御開始閾値よりも大きくする閾値変更手段(S11〜S20)とを備えたことにある。
【0007】
本発明においては、液圧制御手段が、検出液圧と目標液圧との偏差の絶対値が制御開始閾値を超えたとき、検出液圧が目標液圧に近づくようにリニア制御弁の駆動制御を開始する。ホイールシリンダを備えたブレーキユニットが適正でない場合、例えば、ディスクブレーキユニットであればブレーキディスクの肉厚が均一ではなかったり、ドラムブレーキユニットであればドラムの真円度が悪い場合等においては、ホイールシリンダのピストンが周期的に押されホイールシリンダの体積変動が起こって液圧が脈動する。こうした場合、液圧制御手段が検出液圧の変動を捉えてリニア制御弁を駆動制御すると、リニア制御弁が開閉動作を繰り返すため、その作動は過度なものとなり、リニア制御弁の耐久寿命が短くなってしまう。
【0008】
リニア制御弁が過度に作動する場合には、制御開始閾値を増加させることで、そうした状態を抑制することができる。一方で、制御開始閾値を増加させた場合には、ブレーキ操作フィーリングが変化するので、不必要に制御開始閾値を増加させることは回避したい。また、検出液圧の変動は、ホイールシリンダから発生するものに限らない。
【0009】
そこで本発明においては、ホイールシリンダから発生する液圧の脈動が原因となって、リニア制御弁が過度に作動する場合において、制御開始閾値を増加させる。そのために、本発明は、脈動検出手段と閾値変更手段とを備えている。
【0010】
脈動検出手段は、ホイールシリンダの液圧が脈動していることを検出する。例えば、検出液圧の変動、あるいは、検出液圧と目標液圧との偏差の変動を検出する。
【0011】
閾値変更手段は、車両が停車中であってブレーキ操作量あるいは目標液圧が一定に維持される(変動しない)ブレーキ保持状態となるときにリニア制御弁の作動量が正常範囲内であるということを条件として、車両が走行中であってブレーキ保持状態(ブレーキ操作量あるいは目標液圧が一定に維持されるブレーキ保持状態)となるときに液圧検出手段により液圧の脈動が検出されている場合に、制御開始閾値を、液圧の脈動が検出されていない場合における制御開始閾値を表す通常制御開始閾値よりも大きくする。
【0012】
経年変化によりブレーキ装置内に作動液の液漏れが生じている場合等においては、ブレーキ保持状態であっても液圧が変化してリニア制御弁が作動することがある。この場合、制御開始閾値を大きくしてしまうと、制動の遅れを招く可能性がある。そこで、本発明においては、車両が停車中であってブレーキ保持状態となるときにリニア制御弁の作動量が正常範囲内であるという条件を満たしていることを、制御開始閾値を大きくすることができる1つの要件としている。
【0013】
尚、「リニア制御弁の作動量が正常範囲内である」とは、リニア制御弁の作動量が、液漏れ等が生じている異常時における作動量と区別できる正常範囲内に入っていることを表す。この場合、リニア制御弁の作動量は、リニア制御弁の作動が正常範囲内であるか否かを判定できる物理量であればよく、例えば、単位時間あたりの作動回数や作動時間、リニア制御弁に流れる電流値等を用いることができる。また、ブレーキ保持状態とは、ブレーキ操作量あるいは目標液圧がゼロより大きな値(制動力を発生させることができる値)に一定に維持される状態を表す。
【0014】
また、車両が走行中でなければ、ホイールシリンダから液圧の脈動が発生しないため、リニア制御弁が過度に作動する状態にはならない。また、ブレーキペダルが踏み増し操作、踏み戻し操作されているときには、目標液圧が大きく変化するため、リニア制御弁に対して増圧指令あるいは減圧指令が継続され、仮に、ホイールシリンダから液圧の脈動が発生していても、リニア制御弁は過度の作動をしない。また、ブレーキペダルが踏み増し操作、踏み戻し操作されているときに制御開始閾値を大きくすると、ブレーキ操作フィーリングが変化しやすい。従って、本発明においては、こうした状況では、制御開始閾値を大きくしない。
【0015】
従って、本発明によれば、リニア制御弁が過度に作動する状態を適切に捉えて制御開始閾値を大きくすることができる。この結果、制御開始閾値の増加に伴うブレーキ操作フィーリングの低下を抑制しつつリニア制御弁の耐久性を向上させることができる。
【0016】
尚、閾値変更手段は、例えば、車両が停車中であって前記ブレーキ操作量あるいは前記目標液圧が一定に維持されるブレーキ保持状態となるときに前記リニア制御弁の作動量が正常範囲内であるということを条件として、車両が走行中であって前記ブレーキ保持状態となるときに前記液圧検出手段により液圧の脈動が検出されているか否かを判断する判断手段を備えるようにしてもよい。また、閾値変更手段は、例えば、液圧の脈動の振幅が大きいほど制御開始閾値を大きくするようにしてもよい。
【0017】
本発明の他の特徴は、前記脈動検出手段は、前記目標液圧と前記検出液圧との偏差の絶対値が前記制御開始閾値を超え、且つ、前記目標液圧と前記検出液圧との偏差の周期が車輪の1回転の周期以下である場合に、前記液圧が脈動していると判定する(S101〜S107)ことにある。
【0018】
ホイールシリンダから発生する液圧の脈動は、周期性を有し、その周期は車輪の1回転の周期以下となる。また、液圧脈動の周期は、目標液圧と検出液圧との偏差の周期として捉えることができる。一方、リニア制御弁は、目標液圧と検出液圧との偏差の絶対値が制御開始閾値を超えない状態であれば過度に作動しない。そこで、本発明においては、脈動検出手段が、目標液圧と検出液圧との偏差の絶対値が制御開始閾値を超え、且つ、目標液圧と検出液圧との偏差の周期が車輪の1回転の周期以下である場合に、液圧が脈動していると判定する(液圧が脈動していることを検出する)。従って、本発明によれば、リニア制御弁が過度に作動する状態を一層適切に捉えることができる。
【0019】
本発明の他の特徴は、前記閾値変更手段は、前記目標液圧と前記検出液圧との偏差の絶対値が前記制御開始閾値以下になるまで、前記制御開始閾値を大きくする(S102,S108)ことにある。
【0020】
本発明によれば、目標液圧と検出液圧との偏差の絶対値が制御開始閾値以下になるまで、制御開始閾値が大きくされるため、リニア制御弁の過度の作動を確実に防止することができる。この場合、例えば、閾値変更手段は、制御開始閾値を通常制御開始閾値よりも設定量だけ増加させ、目標液圧と検出液圧との偏差の絶対値が制御開始閾値以下になるまで、制御開始閾値を前記設定量ずつ増加させるようにしてもよい。
【0021】
本発明の他の特徴は、前記脈動検出手段は、前記目標液圧と前記検出液圧との偏差の絶対値が基準値を下回っている状態から上回る状態に変化する周期、あるいは、基準値を上回っている状態から下回る状態に変化する周期が、車輪の1回転の周期以下である場合に、前記目標液圧と前記検出液圧との偏差の周期が車輪の1回転の周期以下であると判定する(S121〜S128)ことにある。
【0022】
本発明においては、目標液圧と検出液圧との偏差の絶対値と、基準値との比較結果(大小関係)の切り替わるタイミングを捉えて検出液圧の周期を検出するため、検出液圧の周期を簡単に検出することができる。また、検出液圧のサンプリングデータを長期間のあいだ記憶しておく必要がないため、データ記憶容量が少なくてすむ。
【0023】
本発明の他の特徴は、前記基準値は、前記通常制御開始閾値の半分以下に設定されることにある。
【0024】
本発明によれば、目標液圧に対して、検出液圧の脈動の中心が相対的に変動しても、検出液圧の周期を適正に検出することができる。
【0025】
本発明の他の特徴は、車両が停車中であって前記ブレーキ保持状態となるときに、設定時間内における前記リニア制御弁の作動回数を検出し、前記検出した作動回数が基準回数以下である場合に、前記リニア制御弁の作動量が正常範囲内であると判定する正常判定手段(S51〜S63)を備えたことにある。
【0026】
経年変化によりブレーキ装置内に作動液の液漏れが生じている場合等においては、ブレーキ保持状態であっても液圧が変化してリニア制御弁が作動することがある。本発明においては、ホイールシリンダから発生する液圧の脈動と、液漏れ等の原因による液圧の脈動とを区別するために、正常判定手段が、車両が停車中であってブレーキ保持状態となるときに、設定時間内におけるリニア制御弁の作動回数を検出し、検出した作動回数が基準回数以下である場合に、リニア制御弁の作動量が正常範囲内であると判定する。従って、本発明によれば、ホイールシリンダから発生する液圧の脈動と、液漏れ等の他の要因にて発生する液圧の脈動とを簡単に区別することができる。これにより、リニア制御弁が過度に作動する状態を適切に捉えて制御開始閾値を大きくすることができる。
【0027】
本発明の他の特徴は、前記制御開始閾値が前記通常制御開始閾値よりも大きく設定されている場合には、前記リニア制御弁の制御量の変化勾配を小さくする勾配制限手段を備えたことにある。
【0028】
制御開始閾値が通常制御開始閾値よりも大きく設定されている場合には、目標液圧と検出液圧との偏差が大きくなってから、リニア制御弁の駆動制御が開始されることになる。このため、状況によっては、リニア制御弁に通電する電流が急変して車両姿勢が急に変化する可能性がある。そこで、本発明においては、勾配制限手段が、制御開始閾値が通常制御開始閾値よりも大きく設定されている場合には、通常制御開始値に設定されている場合に比べてリニア制御弁の制御量(例えば、電流値)の変化勾配を小さくする。これにより、リニア制御弁に流す電流の変化が制限されて車両姿勢の急変を抑制することができる。尚、リニア制御弁の制御量の変化勾配を小さくするタイミングは、必ずしも、制御開始閾値が通常制御開始閾値を超えるタイミングにする必要はなく、例えば、制御開始閾値が通常制御開始閾値よりも大きな基準値を超えた段階から開始するようにしてもよい。
【0029】
本発明の他の特徴は、車両が旋回したこと、車速が基準速度以下に低下したこと、ブレーキペダル操作が解除されたことの少なくとも1つが検出されたとき、前記閾値変更手段により変更された制御開始閾値を通常制御開始閾値に戻すリセット手段(S201〜S204)を備えたことにある。
【0030】
例えば、複数輪のホイールシリンダの液圧を1つの液圧系統で制御しているシステムにおいては、車両が旋回して内輪差あるいは外輪差が生じた場合、複数輪のホイールシリンダで発生していた液圧の脈動の位相が互いにずれて検出液圧の脈動の状態が変化することがある。また、車速が小さい場合には大きい場合に比べて、液圧の脈動が発生しにくい状況となる。また、ブレーキペダル操作が解除された場合には、ハンドル操作が行われるなど車両状態が変化する可能性が高い。そこで、本発明においては、リセット手段が、車両が旋回したこと、車速が基準速度以下に低下したこと、ブレーキペダル操作が解除されたことの少なくとも1つが検出されたとき、閾値変更手段により変更された制御開始閾値を通常制御開始閾値に戻す。
【0031】
例えば、液圧の脈動の大きさに応じて増加させた制御開始閾値を記憶し、ブレーキ保持状態となる度に、その記憶した制御開始閾値を使用するシステムを構成した場合には、リセット手段を備えることで、適切なタイミングで制御開始閾値を通常制御開始閾値に戻すことができる。これにより、無駄にブレーキ操作フィーリングを変えてしまうことが抑制される。
【0032】
尚、上記説明においては、発明の理解を助けるために、実施形態に対応する発明の構成に対して、実施形態で用いた符号を括弧書きで添えているが、発明の各構成要件は前記符号によって規定される実施形態に限定されるものではない。
【図面の簡単な説明】
【0033】
【図1】本実施形態におけるブレーキ制御装置の概略システム構成図である。
【図2】液圧脈動の伝搬経路を表す説明図である。
【図3】リニア制御弁が過度に作動している状態を表すグラフである。
【図4】閾値可変制御ルーチンを表すフローチャートである。
【図5】脈動検出ルーチンを表すフローチャートである。
【図6】停車時リニア制御弁作動確認ルーチンを表すフローチャートである。
【図7】制御開始閾値Xの変化を表すグラフである。
【図8】検出液圧の応答遅れを表すグラフである。
【図9】閾値可変制御ルーチンにおける変形部分の処理を表すフローチャートである。
【図10】検出液圧の脈動を表すグラフである。
【図11】目標液圧の変動を表すグラフである。
【図12】液漏れにより変化する検出液圧を表すグラフである。
【図13】脈動周期を求める方法を表すグラフである。
【図14】車速と車輪の1回転の周期との関係を表すグラフである。
【図15】検出液圧と目標液圧との関係を表すグラフである。
【図16】第2実施形態の脈動検出ルーチンを表すフローチャートである。
【図17】第2実施形態の脈動周期検出ルーチンを表すフローチャートである。
【図18】第2実施形態の制御開始閾値の変化を表すグラフである。
【図19】閾値可変制御リセットルーチンを表すフローチャートである。
【図20】電流勾配制限設定ルーチンを表すフローチャートである。
【図21】リニア制御弁の電流変化を表すグラフである。
【発明を実施するための形態】
【0034】
以下、本発明の一実施形態に係る車両のブレーキ制御装置について図面を用いて説明する。図1は、本実施形態に係る車両のブレーキ制御装置の概略システム構成図である。
【0035】
本実施形態のブレーキ制御装置は、ブレーキペダル10と、マスタシリンダユニット20と、動力液圧発生装置30と、液圧制御弁装置50と、各車輪にそれぞれ設けられるブレーキユニット40FR,40FL,40RR,40RLと、ブレーキ制御を司るブレーキECU100とを備える。ブレーキユニット40FR,40FL,40RR,40RLは、ブレーキディスク41FR,41FL,41RR,41RLとブレーキキャリパに内蔵されたホイールシリンダ42FR,42FL,42RR,42RLとを備える。尚、ブレーキユニット40は、4輪ともにディスクブレーキ式に限るものではなく、例えば、4輪ともドラムブレーキ式であってもよいし、前輪がディスクブレーキ式、後輪がドラムブレーキ式など任意に組み合わせたものでもよい。
【0036】
以下、車輪毎に設けられる構成については、その符号の末尾に、右前輪についてはFR、左前輪についてはFL、右後輪についてはRR、左後輪についてはRLを付しているが、以下、車輪位置を特定しない場合には、末尾の符号を省略する。
【0037】
ホイールシリンダ42FR,42FL,42RR,42RLは、液圧制御弁装置50に接続され、液圧制御弁装置50から供給される作動液(ブレーキフルード)の液圧が伝達され、この液圧により、車輪と共に回転するブレーキディスク41FR,41FL,41RR,41RLにブレーキパッドを押し付けて車輪に制動力を付与する。
【0038】
マスタシリンダユニット20は、液圧ブースタ21、マスタシリンダ22、レギュレータ23、リザーバ24を備える。液圧ブースタ21は、ブレーキペダル10に連結されており、ブレーキペダル10に加えられたペダル踏力を増幅してマスタシリンダ22に伝達する。液圧ブースタ21は、動力液圧発生装置30からレギュレータ23を介して作動液が供給されることにより、ペダル踏力を増幅してマスタシリンダ22に伝達する。マスタシリンダ22は、ペダル踏力に対して所定の倍力比を有するマスタシリンダ圧を発生する。
【0039】
マスタシリンダ22とレギュレータ23との上部には、作動液を貯留するリザーバ24が設けられている。マスタシリンダ22は、ブレーキペダル10の踏み込みが解除されているときにリザーバ24と連通する。レギュレータ23は、リザーバ24と動力液圧発生装置30のアキュムレータ32との双方に連通し、リザーバ24を低圧源とするとともにアキュムレータ32を高圧源として、マスタシリンダ圧とほぼ等しい液圧を発生する。以下、レギュレータ23の液圧を、レギュレータ圧と呼ぶ。尚、マスタシリンダ圧とレギュレータ圧とは厳密に同一にする必要はなく、例えば、レギュレータ圧をマスタシリンダ圧よりも若干高圧になるように設定してもよい。
【0040】
動力液圧発生装置30は、動力液圧源であって、ポンプ31とアキュムレータ32とを備える。ポンプ31は、その吸入口がリザーバ24に接続され、吐出口がアキュムレータ32に接続され、モータ33を駆動することにより作動液を加圧する。アキュムレータ32は、ポンプ31により加圧された作動液の圧力エネルギーを窒素等の封入ガスの圧力エネルギーに変換して蓄える。また、アキュムレータ32は、マスタシリンダユニット20に設けられたリリーフバルブ25に接続されている。リリーフバルブ25は、作動液の圧力が異常に高まった場合には、開弁して作動液をリザーバ24に戻す。
【0041】
このように、ブレーキ制御装置は、ホイールシリンダ42に作動液の液圧を付与する液圧源として、ドライバーのブレーキ踏力(ブレーキペダル10を踏み込む力)を利用したマスタシリンダ22、レギュレータ23と、ドライバーのブレーキ踏力とは無関係に液圧を付与する動力液圧発生装置30とを備えている。マスタシリンダ22、レギュレータ23、動力液圧発生装置30は、マスタ配管11、レギュレータ配管12、アキュムレータ配管13を介してそれぞれ液圧制御弁装置50に接続される。また、リザーバ24は、リザーバ配管14を介して液圧制御弁装置50に接続される。
【0042】
液圧制御弁装置50は、各ホイールシリンダ42FR,42FL,42RR,42RLに接続される4つの個別流路51FR,51FL,51RR,51RLと、個別流路51FR,51FL,51RR,51RLを連通する主流路52と、主流路52とマスタ配管11とを接続するマスタ流路53と、主流路52とレギュレータ配管12とを接続するレギュレータ流路54と、主流路52とアキュムレータ配管13とを接続するアキュムレータ流路55とを備える。マスタ流路53とレギュレータ流路54とアキュムレータ流路55とは、主流路52に対して並列に接続される。
【0043】
各個別流路51FR,51FL,51RR,51RLには、その途中にそれぞれABS保持弁61FR,61FL,61RR,61RLが設けられる。ABS保持弁61は、ソレノイドの非通電時にスプリングの付勢力により開弁状態を維持し、ソレノイドの通電中においてのみ閉弁状態となる常開式電磁開閉弁である。ABS保持弁61は、開弁状態においては、作動液を双方向に流すことができ方向性を有さない。
【0044】
また、各個別流路51FR,51FL,51RR,51RLには、ABS保持弁61FR,61FL,61RR,61RLと並列にリターンチェック弁62FR,62FL,62RR,62RLが設けられる。リターンチェック弁62は、主流路52からホイールシリンダ42に向かう作動液の流れを遮断し、ホイールシリンダ42から主流路52に向かう作動液の流れを許容する弁である。つまり、ホイールシリンダ42の液圧(ホイールシリンダ圧と呼ぶ)が主流路52の液圧よりも高圧となる場合に機械的に弁体が開いてホイールシリンダ42の作動液を主流路52側に流し、ホイールシリンダ圧が主流路52の液圧と等しくなると弁体が閉弁するように構成されている。従って、ABS保持弁61が閉弁されてホイールシリンダ圧が保持されているときに、主流路52における制御液圧が低下してホイールシリンダ圧を下回った場合には、ABS保持弁61を閉弁状態に維持したままホイールシリンダ圧を主流路52の制御液圧にまで減圧することができる。
【0045】
また、各個別流路51FR,51FL,51RR,51RLには、それぞれ減圧用個別流路56FR,56FL,56RR,56RLが接続される。各減圧用個別流路56は、リザーバ流路57に接続される。リザーバ流路57は、リザーバ配管14を介してリザーバ24に接続される。各減圧用個別流路56FR,56FL,56RR,56RLには、その途中にそれぞれABS減圧弁63FR,63FL,63RR,63RLが設けられている。各ABS減圧弁63は、ソレノイドの非通電時にスプリングの付勢力により閉弁状態を維持し、ソレノイドの通電中においてのみ開弁状態となる常閉式電磁開閉弁である。各ABS減圧弁63は、開状態において作動液をホイールシリンダ42から減圧用個別流路56を介してリザーバ流路57に流すことでホイールシリンダ圧を低下させる。
【0046】
ABS保持弁61およびABS減圧弁63は、車輪がロックしてスリップした場合に、ホイールシリンダ圧を下げて車輪のロックを防止するアンチロックブレーキ制御の作動時などにおいて開閉制御される。
【0047】
主流路52には、その途中に連通弁64が設けられる。連通弁64は、ソレノイドの非通電時にスプリングの付勢力により閉弁状態を維持し、ソレノイドの通電中においてのみ開弁状態となる常閉式電磁開閉弁である。主流路52は、連通弁64を境として、一方側がマスタ流路53に接続される第1主流路521、他方側がレギュレータ流路54およびアキュムレータ流路55に接続される第2主流路522に区分けされる。連通弁64が閉弁状態にあるときには、第1主流路521と第2主流路522との間の作動液の流通が遮断され、連通弁64が開弁状態にあるときには、第1主流路521と第2主流路522との間の作動液の流通が双方向に許容される。
【0048】
マスタ流路53には、その途中にマスタカット弁65が設けられる。マスタカット弁65は、ソレノイドの非通電時にスプリングの付勢力により開弁状態を維持し、ソレノイドの通電中においてのみ閉弁状態となる常開式電磁開閉弁である。マスタカット弁65が閉弁状態にあるときには、マスタシリンダ22と第1主流路521との間の作動液の流通が遮断され、マスタカット弁65が開弁状態にあるときには、マスタシリンダ22と第1主流路521との間の作動液の流通が双方向に許容される。
【0049】
マスタ流路53には、マスタカット弁65が設けられる位置よりもマスタシリンダ22側において、シミュレータ流路71が分岐して設けられる。シミュレータ流路71には、シミュレータカット弁72を介してストロークシミュレータ70が接続される。シミュレータカット弁72は、ソレノイドの非通電時にスプリングの付勢力により閉弁状態を維持し、ソレノイドの通電中においてのみ開弁状態となる常閉式電磁開閉弁である。シミュレータカット弁72が閉弁状態にあるときには、マスタ流路53とストロークシミュレータ70との間の作動液の流通が遮断され、シミュレータカット弁72が開弁状態にあるときには、マスタ流路53とストロークシミュレータ70との間の作動液の流通が双方向に許容される。
【0050】
ストロークシミュレータ70は、複数のピストンやスプリングを備えており、シミュレータカット弁72が開弁状態にあるときに、ブレーキ操作量に応じた量の作動液を内部に導入してブレーキペダル10のストローク操作を可能にするとともに、ペダル操作量に応じた反力を発生させて、ドライバーのブレーキ操作フィーリングを良好にするものである。
【0051】
レギュレータ流路54には、その途中にレギュレータカット弁66が設けられる。レギュレータカット弁66は、ソレノイドの非通電時にスプリングの付勢力により開弁状態を維持し、ソレノイドの通電中においてのみ閉弁状態となる常開式電磁開閉弁である。レギュレータカット弁66が閉弁状態にあるときには、レギュレータ23と第2主流路522との間の作動液の流通が遮断され、レギュレータカット弁66が開弁状態にあるときには、レギュレータ23と第2主流路522との間の作動液の流通が双方向に許容される。
【0052】
アキュムレータ流路55には、その途中に増圧リニア制御弁67Aが設けられる。また、アキュムレータ流路55が接続される第2主流路522は、減圧リニア制御弁67Bを介してリザーバ流路57に接続される。増圧リニア制御弁67Aおよび減圧リニア制御弁67Bは、ソレノイドの非通電時にスプリングの付勢力により閉弁状態を維持し、ソレノイドへの通電量(電流値)の増加にしたがって開度を増加させる常閉式電磁リニア制御弁である。増圧リニア制御弁67Aおよび減圧リニア制御弁67Bは、スプリングが弁体を閉弁方向に付勢する力と、一次側(入口側)と二次側(出口側)の差圧により弁体が開弁方向に付勢される力との差分である閉弁力により閉弁状態を維持し、ソレノイドへの通電により発生する弁体を開弁させる力が、この閉弁力を上回った場合に、弁体に働く力のバランスに応じた開度で開弁する。従って、ソレノイドへの通電量(電流値)を制御することにより開度を調整することができる。この増圧リニア制御弁67Aおよび減圧リニア制御弁67Bは、本発明におけるリニア制御弁に相当する。以下、増圧リニア制御弁67Aと減圧リニア制御弁67Bについて、両者を区別する必要が無い場合には、それらをリニア制御弁67と総称する。
【0053】
動力液圧発生装置30および液圧制御弁装置50は、ブレーキECU100により駆動制御される。ブレーキECU100は、マイコンを主要部として備えるとともに、ポンプ駆動回路、電磁弁駆動回路、各種のセンサ信号を入力する入力インターフェース、通信インターフェース等を備えている。液圧制御弁装置50に設けられた電磁開閉弁、リニア制御弁67は、全てブレーキECU100に接続され、ブレーキECU100から出力されるソレノイド駆動信号により開閉状態および開度(リニア制御弁67の場合)が制御される。また、動力液圧発生装置30に設けられたモータ33についても、ブレーキECU100に接続され、ブレーキECU100から出力されるモータ駆動信号により駆動制御される。
【0054】
液圧制御弁装置50には、アキュムレータ圧センサ101、レギュレータ圧センサ102、制御圧センサ103が設けられる。アキュムレータ圧センサ101は、増圧リニア制御弁67Aよりも動力液圧発生装置30側(上流側)のアキュムレータ流路55における作動液の圧力であるアキュムレータ圧Paccを検出する。アキュムレータ圧センサ101は、検出したアキュムレータ圧Paccを表す信号をブレーキECU100に出力する。ブレーキECU100は、アキュムレータ圧Paccを所定の周期で読み込み、アキュムレータ圧Paccが予め設定した最低設定圧を下回る場合にはモータ33を駆動してポンプ31により作動液を加圧し、常にアキュムレータ圧Paccが設定圧範囲内に維持されるように制御する。
【0055】
レギュレータ圧センサ102は、レギュレータカット弁66よりもレギュレータ23側(上流側)のレギュレータ流路54における作動液の圧力であるレギュレータ圧Pregを検出する。レギュレータ圧センサ102は、検出したレギュレータ圧Pregを表す信号をブレーキECU100に出力する。制御圧センサ103は、第1主流路521における作動液の圧力である制御圧Pxを表す信号をブレーキECU100に出力する。
【0056】
また、ブレーキECU100には、ブレーキペダル10に設けられたストロークセンサ104が接続される。ストロークセンサ104は、ブレーキペダル10の踏み込み量(操作量)であるペダルストロークを検出し、検出したペダルストロークSpを表す信号をブレーキECU100に出力する。また、ブレーキECU100には、車輪速センサ105、操舵角センサ106が接続される。車輪速センサ105は、左右前後輪の回転速度である車輪速を検出し、検出した車輪速Vxを表す信号をブレーキECU100に出力する。車輪速Vxは、後述する車輪の回転周期の検出、および、車速の検出に使用される。また、操舵角センサ106は、車両の操舵角を検出し、検出した操舵角θを表す信号をブレーキECU100に出力する。
【0057】
次に、ブレーキECU100が実行するブレーキ制御について説明する。ブレーキECU100は、動力液圧発生装置30の出力する液圧をリニア制御弁67にて調圧してホイールシリンダ42に伝達するリニア制御モードと、ドライバーの踏力により発生した液圧をホイールシリンダに伝達するバックアップモードとの少なくとも2つの制動モードによるブレーキ制御を選択的に実行する。本実施形態における特徴は、リニア制御モードにおいて適用されるものであるため、バックアップモードについての説明は省略する。
【0058】
リニア制御モードにおいては、マスタカット弁65、レギュレータカット弁66は、ソレノイドへの通電により閉弁状態に維持され、連通弁64は、ソレノイドへの通電により開弁状態に維持される。また、シミュレータカット弁72は、ソレノイドへの通電により開弁状態に維持される。また、増圧リニア制御弁67Aおよび減圧リニア制御弁67Bは、ソレノイドが通電制御状態におかれて、通電量に応じた開度に制御される。また、ABS保持弁61およびABS減圧弁63については、アンチロックブレーキ制御など必要に応じて開閉され、通常においては、ABS保持弁61は開弁状態に維持され、ABS減圧弁63は閉弁状態に維持される。
【0059】
リニア制御モードにおいては、マスタカット弁65およびレギュレータカット弁66が閉弁されるため、マスタシリンダユニット20から出力される液圧は、ホイールシリンダ42に伝達されない。また、連通弁64が開弁状態に維持され、増圧リニア制御弁67Aおよび減圧リニア制御弁67Bが通電制御状態におかれる。このため、動力液圧発生装置30の出力する液圧(アキュムレータ圧)が増圧リニア制御弁67Aと減圧リニア制御弁67Bにより調圧されて4輪のホイールシリンダ42に伝達される。この場合、各ホイールシリンダ42は、主流路52により連通されているため、ホイールシリンダ圧が4輪全て同じ値となる。このホイールシリンダ圧は、制御圧センサ103により検出することができる。
【0060】
本実施形態のブレーキ制御装置が設けられる車両は、例えば、バッテリ電源により駆動されるモータと、ガソリン燃料により駆動される内燃機関とを備えたハイブリッド車両である。ハイブリッド車両においては、車輪の回転力でモータを発電させ、この発電電力をバッテリに回生させることにより制動力を得る回生制動を行っている。こうした回生制動を行う場合には、車両を制動させるために必要な総制動力から回生による制動力分を除いた制動力をブレーキ制御装置で発生させることにより、回生制動と液圧制動とを併用したブレーキ回生協調制御を行うことができる。
【0061】
ブレーキECU100は、制動要求を受けてブレーキ回生協調制御を開始する。制動要求は、例えばドライバーがブレーキペダル10を踏み込み操作した場合など、車両に制動力を付与すべき時において発生する。ブレーキECU100は、制動要求を受けると、ペダルストロークセンサ104により検出されるペダルストロークSpに基づいて目標制動力を演算する。目標制動力は、ペダルストロークSpが大きいほど大きな値に設定される。尚、ストロークセンサ104により検出されるペダルストロークSpに代えて、レギュレータ圧センサ102により検出されるレギュレータ圧Pregに基づいてブレーキ操作量を検出する構成であっても良い。また、他にもブレーキペダル10の踏み込み力を検出する踏力センサを設けて、踏力に基づいてブレーキ操作量を検出する構成であって良い。
【0062】
ブレーキECU100は、演算した目標制動力を表す情報をハイブリッドECU(図示略)に送信する。ハイブリッドECUは、目標制動力のうち、電力回生により発生させた制動力を演算して、その演算結果である回生制動力を表す情報をブレーキECU100に送信する。これにより、ブレーキECU100は、目標制動力から回生制動力を減算することによりブレーキ制御装置で発生させるべき制動力である目標液圧制動力を演算する。ハイブリッドECUで行う電力回生により発生する回生制動力は、モータの回転速度により変化するだけでなく、バッテリの充電状態(SOC)等によっても回生電流制御により変化する。従って、目標制動力から回生制動力を減算することにより、適切な目標液圧制動力を演算することができる。
【0063】
ブレーキECU100は、演算した目標液圧制動力に基づいて、この目標液圧制動力に対応した各ホイールシリンダ42の目標液圧を演算し、ホイールシリンダ圧が目標液圧と等しくなるように、フィードバック制御により増圧リニア制御弁67Aと減圧リニア制御弁67Bの駆動電流を制御する。つまり、制御圧センサ103により検出される制御圧Px(=ホイールシリンダ圧)が目標液圧に追従するように、増圧リニア制御弁67Aと減圧リニア制御弁67Bの各ソレノイドに流す電流を制御する。
【0064】
これにより、作動液が動力液圧発生装置30から増圧リニア制御弁67Aを介して各ホイールシリンダ42に供給され、車輪に制動力が発生する。また、必要に応じてホイールシリンダ42から作動液が減圧リニア制御弁67Bを介して排出され、車輪に発生する制動力が調整される。
【0065】
尚、本発明は、ブレーキ回生協調制御を行うことを必須とするものではないため、回生制動力を発生させない車両においても適用することができる。この場合には、ブレーキ操作量に基づいて目標液圧を直接演算すればよい。目標液圧は、例えば、マップや計算式等を使って、ブレーキ操作量が大きくなるほど大きな値に設定される。
【0066】
上述したように、ブレーキECU100は、リニア制御モードにおいて、制御圧センサ103により検出される制御圧Px(以下、検出液圧Pxと呼ぶ)が目標液圧P*に追従するように、リニア制御弁67(増圧リニア制御弁67と減圧リニア制御弁67B)の各ソレノイドに流す電流を制御する。ブレーキECU100は、こうした電流制御を行うにあたって、リニア制御弁67を通電しない不感帯を設定している。不感帯は、目標液圧P*を中心としてプラス側とマイナス側とにおいて所定の幅で設定される。ブレーキECU100は、検出液圧Pxが不感帯に入っている場合には、リニア制御弁67を通電しなく、検出液圧Pxが不感帯から外れると、目標液圧P*と検出液圧Pxとの偏差に応じて、偏差をゼロに近づけるようにリニア制御弁67の通電を制御する。例えば、目標液圧P*と検出液圧Pxとの偏差(P*−Px)を用いたPID制御などのフィードバック制御を行う。
【0067】
この不感帯の境界が、リニア制御弁67の通電が開始される点となるため、本実施形態においては、目標液圧P*から不感帯の境界までの幅を制御開始閾値Xと呼ぶ。尚、制御開始閾値を、目標液圧P*±(不感帯幅)と定義してもよい。本実施形態においては、不感帯の幅を可変するため、説明が煩雑にならないように、目標液圧から不感帯の境界までの幅を制御開始閾値と定義し、不感帯の幅を可変することを制御開始閾値を可変することと同一の意味として取り扱う。また、本実施形態においては、制御開始閾値は、目標液圧P*に対してプラス側の値とマイナス側の値とを同一にしているが、それぞれ異なるようにしてもよい。
【0068】
ブレーキユニット40においては、回転するブレーキディスク41にブレーキパッドを押しつけて車輪に制動力を付与するが、ブレーキパッドとブレーキディスク41との摺動に伴って、ブレーキディスク41の肉厚が薄くなり、肉厚差が生じることがある。この場合には、ブレーキディスク41が回転しているときに、その肉厚差によりホイールシリンダ42内のピストンが動かされ、ホイールシリンダ42の液圧が脈動する。
【0069】
本実施形態においては、ディスクブレーキを使用しているが、それに代えて、ドラムブレーキを使用することもできる。ドラムブレーキの場合には、車輪と一体的に回転可能なドラムと、ドラムの内側に設けられた一対のシューと、シューを拡開させるホイールシリンダとを備えており、ホイールシリンダに液圧が供給されることにより一対のシューが拡開してドラムの内周面を押しつけて車輪に制動力を付与する。ドラムブレーキの場合には、ドラムの回転中心軸が車輪の回転中心軸に対して偏心した状態でドラムが取り付けられている場合や、ドラムの真円度が悪い場合には、ドラムが回転しているときに、ホイールシリンダのピストンが動かされて、ホイールシリンダの液圧が脈動する。
【0070】
従って、ディスクブレーキ、ドラムブレーキの何れにおいても、上記の状況が発生した場合にはブレーキ振動が発生する。また、液圧の脈動は、図2に示す伝搬経路(左後輪の例)にて制御圧センサ103に伝達される。このため、図3の上段のグラフに示すように、検出液圧Pxが脈動し、検出液圧Pxと目標液圧P*との偏差が制御開始閾値Xを周期的に超えるようになると、図3の下段のグラフに示すように、リニア制御弁67が開弁動作と閉弁動作とを繰り返す。つまり、リニア制御弁67が過度に作動してしまう。これにより、リニア制御弁67の耐久寿命が低下する。
【0071】
そこで、本実施形態においては、リニア制御弁67が過度に作動する状態であるか否かを判断し、リニア制御弁67が過度に作動する状態であると判断した場合には、制御開始閾値Xを大きくして、リニア制御弁67が過度に作動しないようにする。
【0072】
この場合、単に、作動液の脈動が検出されたということだけで、制御開始閾値Xを大きくしてしまうと、適切なものとならない。例えば、制御開始閾値Xを大きくする必要がない状態において制御開始閾値Xを大きくしてしまうと、無駄にブレーキ操作フィーリングを低下させてしまうことになる。逆に、制御開始閾値Xを大きくする必要があるにも関わらず、その増大量が不足してしまうと、リニア制御弁67の過度の作動を適切に抑制することができなる。
【0073】
本実施形態においては、リニア制御弁67が過度に作動する状態であると判断する条件、つまり、制御開始閾値Xを増大させる制御(閾値増大制御と呼ぶ)を開始する条件が4つ設定されている。以下、この4つの条件について説明する。
【0074】
<第1条件>
第1条件は、ブレーキ操作量あるいは目標液圧P*が一定に維持されている状態になっていることである。つまり、ブレーキペダル10の踏み込み量が変動せずに一定となるペダル保持操作状態であること、あるいは、目標液圧P*が変動せずに一定(制動力を発生できる値での一定)に維持されていることを第1条件としている。以下、ブレーキ操作量あるいは目標液圧P*が一定に維持されている状態をブレーキ保持状態と呼ぶ。ブレーキペダル10の踏み増し時あるいは踏み戻し時、もしくは、目標液圧P*の増加時あるいは減少時においては、目標液圧P*が変化していくため、ブレーキECU100は増圧指令、あるいは減圧指令を継続して出力する。このため、ホイールシリンダ42において液圧の脈動が発生していても、リニア制御弁67が過度に作動する(開閉動作を繰り返す)ことはない。従って、ブレーキペダル10の踏み増し時あるいは踏み戻し時、もしくは、目標液圧P*の増加時あるいは減少時は、リニア制御弁67が過度に作動する状態ではない。
【0075】
また、ブレーキペダル10の踏み増し時あるいは踏み戻し時、もしくは、目標液圧P*の増加時あるいは減少時に閾値増大制御を開始してしまうと、ブレーキ操作フィーリングが変化しやすい。一方、ドライバーのペダル操作意志の少ないブレーキ保持状態においては、ブレーキ操作フィーリングの変化を非常に小さくすることができる。従って、ブレーキ保持状態においては、閾値増大制御を行うことができる。
【0076】
<第2条件>
第2条件は、車両が走行していることである。車両が走行していない状態においては、車輪が回転しないため(ブレーキディスク41あるいはブレーキドラムが回転しないため)ホイールシリンダ42内のピストンが動かされず、液圧脈動は発生しない。従って、ホイールシリンダ42内のピストンが動かされる状況となる車両走行中であることが第2条件として設定される。
【0077】
<第3条件>
第3条件は、液圧の脈動が検出されていることである。検出できない程度の大きさの脈動であれば、リニア制御弁67は過度に作動しない。従って、液圧の脈動が検出されていることが第3条件として設定される。尚、後述するように、振幅条件など所定の脈動判定条件が満足されているときに、液圧が脈動していると判定される。
【0078】
<第4条件>
第4条件は、車両が停車中でブレーキ保持状態となっているときにリニア制御弁67が殆ど作動していないことである。弁等の部品の経年劣化により液漏れが生じると、ブレーキ保持状態であっても、液圧が変化しリニア制御弁67が作動する。また、作動液の粘度が非常に高い状況においても、作動液の流れが悪くなって、ブレーキ保持状態であっても、液圧が変化してリニア制御弁67が作動することもある。このような状況において、制御開始閾値を増加させてしまうと、制動の低下や制動のかかり過ぎが発生することがある。そこで、車両走行中でブレーキ保持状態となっているときに、リニア制御弁67が作動する場合には、それがブレーキユニット40の不均衡な構造(ブレーキディスクの肉厚の不均一、ドラムの真円度不良等)に起因するものなのか、液漏れ等の他の要因によるものかを判別する必要がある。
【0079】
ブレーキユニット40の不均衡な構造に起因する脈動は、停車中においては発生しない。そこで、車両停車中でブレーキ保持状態となっているときにリニア制御弁67が作動した場合には、液漏れ等の他の要因によるものであると判定することができる。従って、第4条件は、液漏れ等の他の要因でリニア制御弁67が作動する状況に対して閾値増大制御が行われないように制限するものである。
【0080】
次に、ブレーキECU100の実行する閾値可変制御処理について説明する。図4は、閾値可変制御ルーチンを表すフローチャートである。閾値可変制御ルーチンは、上述したブレーキ制御(リニア制御弁67の通電制御)と並行して、所定の短い周期にて繰り返し実行される。
【0081】
閾値可変制御ルーチンが起動すると、ブレーキECU100は、ステップS11において、ストロークセンサ104により検出されるペダルストロークSpを読み込む。続いて、ステップS12において、ペダルストロークSpおよびペダルストロークSpの微分値(単位時間あたりの変化量)に基づいて、ブレーキペダル10が保持操作中であるか否かを判断する。このステップS11,ステップS12は、第1条件を満たしているか否かを判断する処理である。ペダルストロークSpが操作有無判定基準値より大きく、かつ、ペダルストロークSpの微分値Sp’の絶対値が保持判定基準値A以下である場合には、ブレーキペダル10が保持操作中であると判定する(S12:Yes)。つまり、第1条件を満たしていると判定する。ペダルストロークSpが操作有無判定基準値以下、あるいは、ペダルストロークSpの微分値Sp’の絶対値が保持判定基準値Aを超える場合には、ブレーキペダル10が保持操作中でない、つまり、第1条件を満たしていないと判定する(S12:No)。
【0082】
このステップS11,S12の処理は、ブレーキペダル10の操作量、および、その変化を検出するものであるため、ペダルストロークSp代えて、レギュレータ圧センサ102により検出されるレギュレータ圧Preg、および、その微分値を使って判断してもよい。また、ブレーキペダル操作量に代えて、目標液圧P*を用いて、ブレーキ保持状態(目標液圧P*が一定)を検出するようにしてもよい。この場合、ブレーキECU100は、ステップS11において、ブレーキ制御で演算される目標液圧P*を読み込み、ステップS12において、目標液圧P*がブレーキ発生判定基準値よりも大きく、かつ、目標液圧P*の微分値(単位時間あたりの変化量)の絶対値が保持判定基準値以下である場合に、ブレーキ保持状態であると判定するようにすればよい。
【0083】
ブレーキECU100は、ステップS12において、第1条件を満たしていないと判定した場合は、ステップS13において、制御開始閾値Xを通常制御開始閾値X0に設定する。この通常制御開始閾値X0は、制御開始閾値を増加させていない通常の値を表す。
【0084】
ブレーキECU100は、ステップS12において、第1条件を満たしていると判定した場合は、ステップS14において、車輪速センサ105により検出される車輪速Vxを読み込む。続いて、ステップS15において、車輪速Vxに基づいて、車両が走行中であるか否かを判断する。例えば、車輪速Vxがゼロより大きいか否かを判断する。車輪速センサ105は、各車輪ごとの車輪速Vxを検出するが、ここでは、任意の車輪の車輪速Vxを読み込んでもよいし、4輪の車輪速Vxを読み込んで、その平均値を車輪速Vxとしてもよく、車両の走行状態を判断できるものであればよい。このステップS13,S14は、第2条件を満たしているか否かを判断する処理である。
【0085】
車両が走行中でない場合は(S15:No)、ブレーキユニット40の不均衡な構造に起因する液圧脈動が発生する状況ではないため、ブレーキECU100は、その処理をステップS13に進めて、制御開始閾値Xを通常制御開始閾値X0に設定する。尚、車両が走行中であるか否かの判定については、車輪速センサ105以外のセンサを用いて行うことができる。例えば、車輪速センサ105に代えて、車両の前後方向の加速度を検出する加速度センサ(図示略)の検出値を読み込み、前後方向の加速度が検出されている場合に、車両が走行中であると判断するようにしてもよい。
【0086】
ブレーキECU100は、車両が走行中である場合は(S15:Yes)、ステップS16において、脈動検出処理を行い、続くステップS17において、脈動検出処理の判定結果を読み込み、脈動が検出されているか否かを判断する。このステップS16,S17の処理は、第3条件を満たしているか否かを判断する処理である。脈動が検出されていない場合には(S17:No)、制御開始閾値Xを大きくする必要が無いため、ステップS13において、制御開始閾値Xを通常制御開始閾値X0に設定する。一方、脈動が検出されている場合には(S17:Yes)、その処理をステップS18に進める。
【0087】
ここで、ステップS16の脈動検出処理について説明する。図5は、ブレーキECU100がステップS16の脈動検出処理として実行する脈動検出ルーチンを表すフローチャートである。この脈動検出ルーチンは、車両が走行中であって、ブレーキ保持状態となる場合においてのみ実行される。
【0088】
ブレーキECU100は、脈動検出ルーチンを開始すると、まず、ステップS31において、車輪速センサ105により検出される車輪速Vxを読み込む。続いて、ステップS32において、制御圧センサ103により検出される検出液圧Pxを読み込みメモリに記憶する。続いて、ステップS33において、車輪速Vxに基づいて、車輪が1回転したか否かを判断し、車輪が1回転していない場合には脈動検出ルーチンを一旦抜けてメインルーチンのステップS17に移行する。脈動検出ルーチンは、閾値可変制御ルーチンに組み込まれているため、所定の短い周期で繰り返される。従って、車輪が1回転するまで、ステップS31〜S33の処理が繰り返される。これにより、検出液圧Pxがサンプリングされる。この車輪が1回転するまでの期間における脈動検出判定結果は、「脈動無し」に設定されている。
【0089】
ブレーキECU100は、こうした処理を繰り返し、車輪が1回転したことを検出すると(S33:Yes)、ステップS34において、車輪が1回転した期間における検出液圧Pxの変動量ΔPxを計算する。この変動量ΔPxは、サンプリングした検出液圧Pxの最大値Pxmaxと最小値Pxminとの差分で求められる。続いて、ブレーキECU100は、ステップS35において、車輪が1回転するあいだの変動量ΔPxが脈動判定基準値ΔPaより大きいか否かを判断し、変動量ΔPxが脈動判定基準値ΔPa以下である場合には(S35:No)には、ステップS36において、液圧が脈動していない(液圧の脈動無し)と判定する。一方、変動量ΔPxが脈動判定基準値ΔPaより大きい場合には(S35:Yes)には、ステップS37において、液圧が脈動している(液圧の脈動有り)と判定する。脈動判定基準値ΔPaは、リニア制御弁67が過度に作動する状態を判定する脈動の大きさを表す値に予め設定される。脈動判定基準値ΔPaは、例えば、通常制御開始閾値X0と同じ値など任意に設定することができる。
【0090】
ブレーキECU100は、脈動有りと判定した場合には、ステップS38において、検出液圧Pxの変動量ΔPxをメモリに記憶する。そして、ステップS39において、脈動の有無の判定結果をメモリに記憶して脈動検出ルーチンを一旦抜けて、所定の周期で上述した処理を繰り返す。車輪が1回転した後は、現時点から車輪の1回転分だけ遡った時点までの期間の検出液圧Pxに基づいて車輪1回転分の変動量ΔPxを計算し、この変動量ΔPxに基づいて液圧脈動の有無判定を行う。また、変動量ΔPxと脈動有無の判定結果とを記憶更新する。尚、ブレーキECU100は、ブレーキ保持状態が解除された場合には、脈動判定結果および変動量ΔPxをメモリに記憶保持した状態で、この脈動検出ルーチンを一旦停止する。そして、再度、ブレーキ保持状態が検出されると(S12,S15:Yes)、脈動検出ルーチンを再開する。この再開時においては、車輪の1回転が検出されるまでの期間の初期値として、メモリに記憶されている脈動判定結果および変動量ΔPxが使用される。
【0091】
ブレーキECU100は、ステップS17(図4)において、脈動有りと判定した場合には、続くステップS18において、リニア制御弁67の停車時作動判定結果を読み込む。リニア制御弁67の停車時作動判定結果は、車両が停車中でブレーキ保持状態となっているときにリニア制御弁67が実質的に作動していないか否かを表す履歴情報、つまり、第4条件を満たしているか否かを表す情報である。リニア制御弁67の停車時作動判定は、停車時リニア制御弁作動確認ルーチンにより行われる。
【0092】
図6は、ブレーキECU100が実行する停車時リニア制御弁作動確認ルーチンを表すフローチャートである。停車時リニア制御弁作動確認ルーチンは、閾値可変制御ルーチンとは独立して任意のタイミングで実施される。停車時リニア制御弁作動確認ルーチンが起動すると、ブレーキECU100は、まず、ステップS51において、車輪速センサ105により検出される車輪速Vxを読み込む。続いて、ステップS52において、車輪速Vxに基づいて、車両が停車中であるか否かを判断する。例えば、車輪速Vxがゼロであるか否かを判断する。車両が停車中でなければ(S52:No)、ステップS53において、後述する計時タイマの値Tをゼロクリアし、ステップS54において、後述する作動回数カウンタの値nをゼロクリアして、停車時リニア制御弁作動確認ルーチンを一旦終了する。
【0093】
ブレーキECU100は、停車時リニア制御弁作動確認ルーチンを所定の周期で繰り返し実行する。そして、車両が停車中であることを検出すると(S52:Yes)、ステップS55において、ストロークセンサ104により検出されるペダルストロークSpを読み込む。続いて、ステップS56において、ペダルストロークSpおよびペダルストロークSpの微分値(単位時間あたりの変化量)に基づいて、ブレーキペダル10が保持操作中であるか否かを判断する。このステップS56において、ブレーキECU100は、ペダルストロークSpが操作有無判定基準値より大きく、かつ、ペダルストロークSpの微分値Sp’の絶対値が保持判定基準値B以下である場合に、ブレーキペダル10が保持操作中であると判定する。この保持判定基準値Bは、ステップS12で用いた保持判定基準値Aよりも小さい、若しくは等しいことが望ましい。つまり、走行中におけるペダル保持操作の判定よりも、停車時リニア制御弁作動確認ルーチンにおけるペダル保持操作の判定レベルを厳しくする事が望ましい。ブレーキECU100は、ブレーキペダル10が保持操作中でなければ、その処理をステップS53に進める。
【0094】
尚、ブレーキペダル操作量に代えて、目標液圧P*を用いて、ブレーキ保持状態(目標液圧P*が一定)を検出するようにしてもよい。この場合、ブレーキECU100は、ステップS55において、ブレーキ制御で演算される目標液圧P*を読み込み、ステップS56において、目標液圧P*がブレーキ発生判定基準値よりも大きく、かつ、目標液圧P*の微分値(単位時間あたりの変化量)の絶対値が判定基準値以下である場合に、ブレーキ保持状態であると判定するようにすればよい。
【0095】
ブレーキECU100は、こうした処理を繰り返し、車両が停車中で、かつ、ブレーキ保持状態であることを検出すると(S56:Yes)、ステップS57において、計時タイマの値Tを値1だけインクリメントする。尚、タイマ値Tの初期値はゼロに設定されている。続いて、ステップS56において、リニア制御弁67が作動したか否かについて判断する。例えば、作動液の液漏れが生じている場合には、検出液圧Pxが低下するため、それに応じてリニア制御弁67に通電指令が出力されリニア制御弁67が作動する。従って、このステップS58においては、リニア制御弁67へ出力する通電指令の有無により判断することができる。あるいは、検出液圧Pxを変化の有無により判断するようにしてもよい。
【0096】
ブレーキECU100は、リニア制御弁67が作動した場合には、作動回数カウンタの値nを値「1」だけインクリメントする。尚、作動回数カウンタ値nの初期値はゼロに設定されている。続いて、ブレーキECU100は、ステップS60において、タイマ値Tがタイムアップ値Tupに到達したか否かを判断し、タイマ値Tがタイムアップ値Tupに到達していなければ、停車時リニア制御弁作動確認ルーチンを一旦終了する。
【0097】
ブレーキECU100は、こうした処理を繰り返す。タイマ値Tがタイムアップ値Tupに到達する前に、車両が走行し始めたり(S52:No)、ブレーキ保持状態が解除された場合(S56:No)には、計時タイマ値Tおよび作動回数カウンタ値nをゼロクリアする。停車中におけるブレーキ保持状態が設定時間継続すると、タイマ値Tがタイムアップ値Tupに到達する。このとき、作動回数カウンタ値nは、設定時間内におけるリニア制御弁67の作動回数を表すものとなる。
【0098】
ブレーキECU100は、タイマ値Tがタイムアップ値Tupに到達すると、ステップS61において、作動回数カウンタ値nが正常判定基準値n0を超えるか否かを判断し、作動回数カウンタ値nが正常判定基準値n0を超える場合には、ステップS62において、リニア制御弁67が作動したと判定し、作動回数カウンタ値nが正常判定基準値n0以下である場合に、ステップS63において、リニア制御弁67が作動していない(正常状態である)と判定する。そしてブレーキECU100は、ステップS64において、判定結果をメモリに記憶して停車時リニア制御弁作動確認ルーチンを一旦終了する。
【0099】
正常判定基準値n0は、作動液の液漏れや高粘度時における流れ不良が生じていない正常時においては、作動回数カウンタ値nが正常判定基準値n0以下になり、作動液の液漏れや高粘度時における流れ不良が生じている異常時においては、作動回数カウンタ値nが正常判定基準値n0を超えるような値に設定されている。従って、正常判定基準値n0は、作動液の液漏れや高粘度時における流れ不良が生じているか否かを判定する判定閾値である。
【0100】
リニア制御弁67が作動したと判定された場合(S62:Yes)は、作動液の液漏れや高粘度時における流れ不良が生じていると推定できる。リニア制御弁67が作動したと判定されている場合が、第4条件が満たされていない状態となり、リニア制御弁67が作動していないと判定されている場合が、第4条件が満たされている状態となる。
【0101】
図4の閾値可変制御ルーチンの説明に戻る。ブレーキECU100は、停車時リニア制御弁作動確認ルーチンによる判定結果を読み込み(S18)、ステップS19において、リニア制御弁67が作動していないか否かを判定し、リニア制御弁67が作動したと判定されている場合には(S19:No)、その処理をステップS13に進めて、制御開始閾値Xを通常制御開始閾値X0に設定する。一方、リニア制御弁67が作動していないと判定されている場合には(S19:Yes)、ステップS20において、制御開始閾値Xを増加させる。例えば、脈動検出ルーチン(図5)のステップS38において記憶した検出液圧Pxの変動量ΔPxだけ制御開始閾値Xを増加させる。つまり、通常制御開始閾値X0に変動量ΔPxを加算した値を制御開始閾値X(=X0+ΔPx)として設定する。あるいは、ステップS38において記憶した検出液圧Pxの変動量ΔPxを制御開始閾値Xに設定するようにしてもよい。尚、制御開始閾値Xは、通常制御開始閾値X0よりも大きくなる値であれば任意に設定することができる。
【0102】
ブレーキECU100は、ステップS13あるいはステップS20において、制御開始閾値Xを設定すると、閾値可変制御ルーチンを一旦終了する。そして、所定の演算周期が経過すると、再び閾値可変制御ルーチンを開始する。
【0103】
この閾値可変制御ルーチンによれば、第1条件から第4条件までの4つの条件が満たされていない間は、制御開始閾値Xが通常制御開始閾値X0に設定される。そして、4つの条件が満たされると(S19:Yes)、リニア制御弁67が過度に作動している状態であると判定されて、制御開始閾値Xが通常制御開始閾値X0よりも大きな値に設定される。
【0104】
こうした状態から、例えば、ブレーキペダル10の踏み増しあるいは踏み戻しが行われると、もしくは、目標液圧P*が増加あるいは減少すると(S12:No)、制御開始閾値Xは通常制御開始閾値X0に戻される(S13)。このとき、その直前における変動量ΔPxがメモリに記憶保持される(S38)。その後、ブレーキ保持状態となると、メモリに記憶しておいた変動量ΔPxに基づいて制御開始閾値Xが設定される。そして、変動量ΔPxが検出される都度、制御開始閾値Xが変動量ΔPxに応じた値に変更されていく。
【0105】
ブレーキペダル10の踏み増しあるいは踏み戻しが行われている間、あるいは、目標液圧P*が変化している間は、それによって検出液圧Pxが変動するため、適正に脈動の検出を行うことができない。また、ブレーキ保持状態に戻ったときに、制御開始閾値Xを通常制御開始閾値X0から開始すると、ブレーキ操作フィーリングが変化しやすい。そこで、ブレーキ操作変更(踏み増し、踏み戻し)、あるいは、目標液圧変更が行われる直前の制御開始閾値Xに関する情報(この例では変動量ΔPx)を記憶保持しておき、再度、ブレーキ保持状態が検出されたときに、記憶しておいた情報に基づいて制御開始閾値Xを設定する。
【0106】
図7は、制御開始閾値Xの変化を表す。時刻t1において、ブレーキ保持状態が検出されると、制御開始閾値Xが増加設定される。そして、時刻t2において、ブレーキペダル10の踏み増し、もしくは、目標液圧増加が検出されると、制御開始閾値Xが元の通常制御開始閾値X0に戻される。
【0107】
ところで、制御開始閾値Xを増加させると、図8に示すように、通常制御開始閾値X0を使用した電流制御を行う場合に比べて、目標液圧P*に対して検出液圧Pxの応答が遅れる。図中において、太線aは目標液圧P*の推移を表し、実線bは通常制御開始閾値X0を使用した検出液圧Pxの推移を表し、実線cは増加させた制御開始閾値Xを使用した検出液圧Pxの推移を表す。この場合、目標液圧P*が設定されてから検出液圧Pxが目標液圧P*に到達するまでの時間が、フェールセーフ閾値(破線d)よりも長くなると、自己診断機能(ダイアグノーシス)によりエラー判定しウォーニングランプが点灯してしまう。そこで、制御開始閾値Xを通常制御開始閾値X0よりも大きく設定している場合には、フェールセーフ閾値(許容遅れ時間)を通常値よりも長くするように変更する処理を加えるようにするとよい。
【0108】
以上説明した本実施形態のブレーキ制御装置によれば、第1条件から第4条件に基づいて、リニア制御弁67が過度に作動する状態であるか否かを判断し、過度に作動する状態であると判定した場合にのみ、制御開始閾値Xを通常制御開始閾値X0よりも増加させる。従って、リニア制御弁67が過度に作動していないときに無駄に制御開始閾値Xを増加させてブレーキ操作フィーリングを低下させてしまうことを抑制できる。また、リニア制御弁67が過度に作動している場合には、制御開始閾値Xを増加させるため、リニア制御弁67の耐久性を向上させることができる。
【0109】
また、液圧脈動の振幅が大きいほど制御開始閾値Xを大きく設定するため、適切な制御開始閾値Xを設定することができ、リニア制御弁67の過度の作動を確実に抑制することができる。
【0110】
また、ブレーキユニット40の不均衡な構造に起因しない脈動(例えば、液漏れ、高粘度による流れ不良等に起因した脈動)が発生する状況においては、第4条件を使って制御開始閾値Xを増加させないようにしているため、制動の低下や制動のかかり過ぎが発生することを抑制することができる。
【0111】
また、制御開始閾値Xを増加させている状態では、フェールセーフ閾値を大きくするため、誤診断やウォーニングランプによる誤報知を防止することができる。
【0112】
ここで、上記実施形態の変形例について説明する。上記実施形態においては、リニア制御弁67が過度に作動する状態であるか否かについて、4つの条件を設定して判断しているが、更に、第5条件を設定するようにしてもよい。
【0113】
この第5条件は、アキュムレータ圧センサ101により検出されるアキュムレータ圧Paccが変動していることである。アキュムレータ圧Paccが変動していれば、実際にリニア制御弁67が作動して作動液が流れたと推定することができる。リニア制御弁67の耐久寿命は、実際に弁体が開閉することにより変化していく。そこで、アキュムレータ圧Paccの変動を検出することでリニア制御弁67が実際に作動したか否かを判断する。
【0114】
この第5条件の判断は、図4の閾値可変制御ルーチンに組み込めばよい。例えば、図9に示すように、ステップS17とステップS18との間に、ステップS21とステップS22の処理を組み込む。ブレーキECU100は、ステップS21において、アキュムレータ圧センサ101により検出されるアキュムレータ圧Paccを読み込む。続いて、ステップS22において、アキュムレータ圧Paccの変化量ΔPaccを検出し、変化量ΔPaccが弁作動判定基準値ΔPacc0より大きいか否かを判断する。変化量ΔPaccが弁作動判定基準値ΔPacc0より大きい場合には、アキュムレータ圧Paccの変動ありと判定して、その処理をステップS18に進める。一方、変化量ΔPaccが弁作動判定基準値ΔPacc0以下であれば、アキュムレータ圧Paccの変動なしと判定して、その処理をステップS13に進める。アキュムレータ圧Paccの変化量ΔPaccの検出は、例えば、予め設定した所定期間内におけるアキュムレータ圧Paccの推移に基づいて、その最大値と最小値との偏差を検出するようにすればよい。
【0115】
この変形例によれば、リニア制御弁67が過度に作動する状態を一層精度良く判定することができる。
【0116】
次に、脈動検出および制御開始閾値の設定処理にかかる第2実施形態について説明する。以下、上述した実施形態を第1実施形態と呼ぶ。
【0117】
例えば、図10(a)に示すように、液圧の脈動幅が制御開始閾値Xよりも小さい場合には、リニア制御弁67の過度な作動は起きない。一方、同図(b)に示すように、液圧の脈動幅が制御開始閾値Xより大きい場合には、リニア制御弁67の過度な作動は起きる。従って、同図(b)のような状態において、液圧の脈動を検出する必要がある。この場合、目標液圧P*と検出液圧Pxとの偏差を計算し、この偏差に基づいてブレーキユニット40から発生する液圧脈動を検出することができる。
【0118】
しかし、次のような課題が残る。ブレーキECU100は、目標液圧勾配がある閾値範囲内に収まるため、微小な目標液圧勾配となるペダル操作を検出することができない。そのため、図11に示すように、検出液圧Pxが一定であっても、微小勾配のペダル操作による目標液圧P*の変動が発生すると、誤って液圧脈動であると判定してしまう。
【0119】
また、作動液の液漏れが生じる場合には、図12に示すように、検出液圧Pxは、低下した後、リニア制御弁67により調圧されて目標液圧P*に近づく。従って、液圧調整により検出液圧Pxが繰り返し変動するため、この場合においても誤って液圧脈動であると判定してしまう。
【0120】
そこで、第2実施形態においては、ブレーキユニット40から発生する液圧脈動(ブレーキユニット40の不均衡な構造に起因する液圧脈動)が周期性を有すること、および、その周期が車輪の1回転あたりにN周期(N≧1)となること着目して、液圧脈動の誤検出を防止する。
【0121】
液圧脈動の周期検出にあたっては、図13に示すように、検出液圧Pxが予め設定した脈動検出閾値P1をクロスするタイミングを検出し、そのクロスするタイミングの周期、この図においては、時刻t1から時刻t2までの時間(t2−t1)、あるいは、時刻t1’から時刻t2’までの時間(t2’−t1’)を求め、この時間を液圧脈動の周期と推定する。そして、液圧脈動の周期が車輪の1回転の周期より大きければ、ブレーキユニット40から発生する液圧脈動ではないと判定する。図14は、車速と車輪の1回転の周期との関係を表す。図中において、塗りつぶした領域Aが、ブレーキユニット40から発生した液圧脈動と判断できる領域となる。この周期判定により、上述した誤った脈動検出を防止することができる。
【0122】
この場合、確実に脈動の周期を捉えることができるようにするためには、脈動検出閾値P1を制御開始閾値Xの1/2以下に設定すればよい。しかし、第2実施形態においても、液圧脈動が検出された場合に制御開始閾値Xを増加させるため、脈動検出閾値P1を、増加した制御開始閾値Xの1/2に設定すると、液圧脈動の中心が目標液圧と重なった場合に、脈動の周期を捉えられない場合がある。
【0123】
例えば、図15(a)に示すように、通常制御開始閾値X0を超える振幅の液圧脈動が、その脈動の中心が目標液圧P*から偏心して発生しており、制御開始閾値Xが図の一点鎖線にて示す位置にまで増加設定されている状態を考える。この状態から液圧脈動の中心が目標液圧P*と揃った場合、図15(b)に示すように、通常制御開始閾値X0の1/2に設定した脈動検出閾値P1であれば、検出液圧Pxが脈動検出閾値P1をクロスするが、増加設定された制御開始閾値Xの1/2に設定した脈動検出閾値P1’の場合には、検出液圧Pxが脈動検出閾値P1’をクロスしなくなり、脈動周期を検出することができなくなる。
【0124】
そこで、この第2実施形態においては、増加設定していない通常制御開始閾値X0の1/2以下の値を脈動検出閾値P1として設定する。これにより、液圧脈動の中心と目標液圧との関係に関わらず、確実に液圧脈動の周期を検出することができる。
【0125】
以下、第2実施形態におけるブレーキECU100の処理について説明する。図16は、第1実施形態における脈動検出ルーチン(図5)に代えて、ブレーキECU100が実行する第2実施形態としての脈動検出ルーチンを表す。この脈動検出ルーチンには、制御開始閾値を設定する処理も含まれている。この脈動検出ルーチンは、第1実施形態と同様に、車両が走行中であって、ブレーキ保持状態である場合においてのみ実行される。
【0126】
脈動検出ルーチンが開始されると、ブレーキECU100は、ステップS101において、制御圧センサ103により検出される検出液圧Pxを読み込み、次式により、現在の目標液圧P*と検出液圧Pxとの偏差の絶対値ΔP(以下、液圧偏差ΔPと呼ぶ)を計算する。
ΔP=|P*−Px|
【0127】
続いて、ブレーキECU100は、ステップS102において、液圧偏差ΔPが現在の制御開始閾値Xより大きいか否かを判断する。制御開始閾値Xの初期値、つまり、脈動検出ルーチンが起動した直後の制御開始閾値Xは、通常制御開始閾値X0に設定されている。従って、脈動検出ルーチンの起動時においては、液圧偏差ΔPと通常制御開始閾値X0とが比較されることになる。ブレーキECU100は、液圧偏差ΔPが制御開始閾値X以下であると判断した場合には、脈動検出ルーチンを一旦終了して、その処理をメインルーチン(図4)のステップS17に進める。この場合、脈動検出判定結果は、その直前までにメモリに記憶されている判定結果が使用される。脈動検出ルーチンの起動時においては、その初期値である「脈動無し」が判定結果として使用される。
【0128】
ブレーキECU100は、ステップS102において、液圧偏差ΔPが現在の制御開始閾値Xより大きいと判定した場合には、続くステップS103において、後述する脈動周期検出ルーチンにより検出された脈動周期を読み込む。続いて、ステップS104において、車輪速センサ105により検出される車輪速Vxを読み込む。
【0129】
続いて、ブレーキECU100は、ステップS105において、車輪速Vxに基づいて車輪の回転周期(車輪が1回転するのに要した時間)を計算し、脈動周期が車輪の回転周期以下であるか否かを判断する。車輪速センサ105は、各車輪ごとの車輪速Vxを検出するが、ここでは、任意の車輪の車輪速Vxを読み込んでもよいし、4輪の車輪速Vxを読み込んで、その平均値を車輪速Vxとして求めるなど任意の方法で車輪速Vxを検出することができる。脈動周期が車輪の回転周期よりも大きければ、ステップS106において、検出された液圧変動がリニア制御弁67を過度に作動させる脈動ではないと判定する。つまり、ブレーキユニット40から発生する液圧脈動ではないと判定する。続いて、ブレーキECU100は、ステップS110において、脈動判定結果をメモリに記憶して、脈動検出ルーチンを一旦終了する。
【0130】
一方、ステップS105において、脈動周期が車輪の回転周期以下であると判断した場合には、ブレーキECU100は、ステップS107において、液圧の脈動が発生している(脈動有り)と判定する。続いて、ブレーキECU100は、ステップS108において、制御開始閾値Xを予め設定した規定値ΔXだけ増加させる。つまり、現在の制御開始閾値Xに規定値ΔXを加算した値を、新たな制御開始閾値Xに設定する(X=X+ΔX)。続いて、ブレーキECU100は、ステップS109において、増加させた制御開始閾値Xをメモリに記憶し、ステップS110において、脈動判定結果をメモリに記憶して、脈動検出ルーチンを一旦終了する。
【0131】
ブレーキECU100は、所定の短い周期で脈動検出ルーチンを繰り返し実行する。制御開始閾値Xが増加設定された後においては、ステップS102における、液圧偏差ΔPの大きさを判定する判定基準値(=制御開始閾値X)も大きくなる。従って、液圧偏差ΔPが制御開始閾値X以下になるまで、制御開始閾値Xが規定値ΔXずつ増加することになる。そして、ブレーキECU100は、液圧偏差ΔPが制御開始閾値X以下になると(S102:No)、ステップS103からの処理をスキップして脈動検出ルーチンを一旦終了する。この場合、ステップS109において記憶した最新の制御開始閾値Xと、ステップS110において記憶した最新の脈動判定結果とが脈動検出ルーチンの結果として出力される。
【0132】
最新の脈動判定結果は、閾値可変制御ルーチン(図4)におけるステップS17の判定に使用される。従って、リニア制御弁67を過度に作動させる脈動が検出されていない場合(S106)には、制御開始閾値Xに通常制御開始閾値X0が設定される(S13)。また、ステップS109においてメモリに記憶した最新の制御開始閾値Xは、閾値可変制御ルーチン(図4)のステップS20において設定される制御開始閾値Xとして使用される。従って、脈動が検出されている場合(S107)であって、第4条件が満足されている場合には、制御開始閾値Xとして、メモリに記憶されている最新の制御開始閾値Xが使用される。
【0133】
尚、液圧偏差ΔPが制御開始閾値Xより大きい状態であることは、リニア制御弁67の目標電流値が設定値(開弁に必要な電流値)を超えていることと同等であるため、液圧偏差ΔPが制御開始閾値Xより大きい状態であることを確認する処理(ステップS101,102)に代えて、リニア制御弁67の目標電流値が設定値を超えていることを確認する処理を行うようにしてもよい。
【0134】
次に、脈動周期検出ルーチンについて説明する。図17は、ブレーキECU100が実行する脈動周期検出ルーチンを表すフローチャートである。脈動周期検出ルーチンは、上記の脈動検出ルーチンが実行されているときに、それと並行して所定の短い周期で繰り返し実行される。
【0135】
ブレーキECU100は、ステップS121において、タイマフラグFが「0」に設定されているか否かを判断する。このタイマフラグFは、後述する計時タイマが計時を行っているか否かを表すもので、脈動周期検出ルーチンの起動時においては「0」に設定されている。ブレーキECU100は、ステップS121において「Yes」と判定すると、続いて、ステップS122において、直前まで検出されていた液圧偏差ΔP(n-1)が脈動検出閾値P1よりも小さく、かつ、今回検出した液圧偏差ΔP(n)が脈動検出閾値P1を超えているか否かを判断する。この液圧偏差ΔPは、上述した脈動検出ルーチンのステップS101で計算した結果を使用することができる。また、今回検出した液圧偏差ΔP(n)とは、今回の1回の検出値により求めた値でもよいが、直近の複数回の検出値の平均値を使うようにすることが好ましい。また、直前まで検出されていた液圧偏差ΔP(n-1)についても同様に、直前回の1回の検出値により求めた値でもよいが、今回分として計算に利用した検出値より前の複数回の検出値の平均値を使うようにすることが好ましい。
【0136】
このステップS122の判断は、図13において時刻t1にて示すように、液圧偏差ΔPが脈動検出閾値P1をクロスする(小から大へクロスする)タイミングであるか否かを判断する処理である。脈動検出閾値P1は、上述したように通常制御開始閾値X0の1/2以下に設定される。この実施形態においては、脈動検出閾値P1は通常制御開始閾値X0の1/2に設定される。ブレーキECU100は、ステップS122の判断が「No」となる場合は、脈動周期検出ルーチンを一旦終了する。ブレーキECU100は、こうした処理を所定の周期で繰り返す。
【0137】
ブレーキECU100は、液圧偏差ΔPが脈動検出閾値P1をクロスしたタイミングを検出すると(S122:Yes)、続くステップS123において、タイマフラグFを「1」に設定する。続いて、ステップS124において、計時タイマの値Tを値1だけインクリメントする。つまり計時を開始する。このタイマ値Tの初期値はゼロに設定されている。
【0138】
続いて、ブレーキECU100は、ステップS125において、直前まで検出されていた液圧偏差ΔP(n-1)が脈動検出閾値P1よりも小さく、かつ、今回検出した液圧偏差ΔP(n)が脈動検出閾値P1を超えているか否かを判断する。このステップS125は、液圧偏差ΔPが脈動検出閾値P1をクロスする(小から大へクロスする)次のタイミングを検出するための判断処理である。例えば、図13における時刻t2となるタイミングを検出するための判断処理である。この場合、ステップS124からステップS125に移行するときに、所定時間だけ待って液圧偏差ΔPの読み込み値を更新しておくことにより、重複したタイミングで「Yes」と判定しないようにするとよい。
【0139】
ブレーキECU100は、ステップS125の判断が「No」となる場合は、脈動周期検出ルーチンを一旦終了する。ブレーキECU100は、所定のインターバルが経過すると、再度、脈動周期検出ルーチンを開始するが、この場合には、タイマフラグFが「1」に設定されているため、ステップS122〜S123の処理をスキップする。従って、ブレーキECU100は、計時タイマ値Tをインクリメントしつつ(S124)、ステップS125の判断を所定の周期で繰り返す。
【0140】
ブレーキECU100は、こうした処理を繰り返し、液圧偏差ΔPが脈動検出閾値P1をクロス(小から大)したことを検出すると(S125:Yes)、ステップS126において、計時タイマ値Tに相当する時間を脈動周期として設定する。続いて、ステップS127において計時タイマ値Tをゼロクリアし、ステップS128においてタイマフラグFを「0」にリセットして脈動周期検出ルーチンを一旦終了する。
【0141】
尚、本実施形態においては、液圧偏差ΔPが脈動検出閾値P1より小さい状態から大きくなる状態に移行するタイミングを捉えているが、液圧偏差ΔPが脈動検出閾値P1より大きい状態から小さくなる状態に移行するタイミング(図13における時刻t1’、時刻t2’)を捉えてもよい。
【0142】
以上説明した第2実施形態においては、リニア制御弁67の過度の作動を確実に防止するために、目標液圧P*と検出液圧Pxとの偏差の絶対値である液圧偏差ΔPと制御開始閾値Xとの大小関係を常に監視し、液圧偏差ΔPが制御開始閾値Xを超えたときに、その脈動周期が、ブレーキユニット40から発生する液圧脈動である可能性がある場合には、制御開始閾値Xを規定値ΔXだけ増加させる。従って、図18に示すように、液圧偏差ΔPが制御開始閾値X以下になるまで、制御開始閾値Xが規定値ΔXずつ増加することになる。このため、制御開始閾値Xを過不足無く適正値に設定することができる。従って、リニア制御弁67の過度の作動を防止するとともに、ブレーキ操作フィーリングの低下を最小限に抑えることができる。
【0143】
また、脈動周期に基づいてブレーキユニット40から発生する液圧脈動ではないと判断できる液圧脈動に対しては、不必要に制御開始閾値Xを増加させないため、これによっても、ブレーキ操作フィーリングの低下を抑制することができる。
【0144】
また、脈動検出閾値P1を通常制御開始閾値X0の1/2の値に設定するため、液圧脈動の周期を確実に検出することができる。
【0145】
また、液圧脈動の検出にあたっては、検出液圧Pxのデータを車輪の1回転周期分サンプリングして記憶する必要がないことから、ブレーキECU100のマイコンのメモリ容量が少なくてすむため、低コストにて実施可能となる。
【0146】
次に、閾値増大制御をリセットする処理について説明する。上述した図4の閾値可変制御ルーチンは、リニア制御弁67が過度に作動する状態であると判定して閾値増大制御(S20)を開始させる処理である。従って、閾値増大制御が開始された後に、ブレーキ保持状態が解除された場合、つまり、ブレーキペダル10の踏み増しあるいは踏み戻しが行われた場合、もしくは、目標液圧が変化した場合であっても、制御開始閾値Xを表す情報、および、脈動が検出されたという情報が記憶保持される。そして、再び、ブレーキ保持状態となると、その制御開始閾値Xを引き継いで閾値増大制御が継続される。このリセット処理においては、閾値可変制御ルーチンにおける制御状態を初期状態に戻す処理である。
【0147】
4輪を1つの液圧系統で制御しているシステムにおいては、例えば、左右輪から発生していた脈動が逆位相となった場合には、系統内で脈動が打ち消しあう。このため、制御圧センサ103において検出される液圧変動は小さくなる。このような液圧変動の状況が変わる場合においては、閾値可変制御ルーチンにおける制御状態を初期状態に戻すことが好ましい。
【0148】
図19は、ブレーキECU100の実行する閾値可変制御リセットルーチンを表すフローチャートである。この閾値可変制御リセットルーチンは、上述した第1実施形態および第2実施形態に適用することができる。閾値可変制御リセットルーチンは、閾値可変制御ルーチンと並行して所定の短い周期で繰り返し実施される。
【0149】
ブレーキECU100は、ステップS201において、車両の旋回により内輪差あるいは外輪差が発生する状況であるか否かを判断する。例えば、操舵角センサ106により検出される操舵角θを読み込み、その操舵角θの絶対値|θ|が予め設定された設定舵角θ1より大きいか否かを判断することで、内輪差あるいは外輪差が発生する状況であるか否かを推定することができる。また、操舵角θに代えて、車両の横加速度を検出する横加速度センサや、車両のヨーレートを検出するヨーレートセンサの検出信号を読み込み、検出した横加速度が設定加速度より大きい場合、あるいは、検出したヨーレートが設定ヨーレートより大きい場合に、内輪差あるいは外輪差が発生する状況であると推定するようにしてもよい。
【0150】
車両が旋回していない場合、つまり、内輪差あるいは外輪差が発生する状況でない場合は、左右輪から発生していた脈動は、逆位相に変わることはなく、そのまま継続されると考えられる。従って、閾値可変制御ルーチンにおける制御状態を初期状態に戻す必要はないため、ブレーキECU100は、閾値可変制御リセットルーチンを一旦終了する。この場合、閾値可変制御ルーチンにおける制御状態は継続される。
【0151】
ブレーキECU100は、内輪差あるいは外輪差が発生する状況であると判定した場合には、続くステップS202において、車速が設定車速より小さいか否かを判断する。この場合、車輪速センサ105により検出される車輪速Vxから求められる車速を使用して判断すればよい。車速が小さい場合には大きい場合に比べて、液圧脈動が発生しにくい状況となる。従って、車速が設定車速より大きい場合には、閾値可変制御ルーチンにおける制御状態を初期状態に戻す必要はないため、ブレーキECU100は、閾値可変制御リセットルーチンを一旦終了する。
【0152】
ブレーキECU100は、車速が設定車速より小さいと判定した場合には、続くステップS203において、制動オフ状態であるか否かを判断する。例えば、ストロークセンサ104により検出されるペダルストロークSpやレギュレータ圧センサ102により検出されるレギュレータ圧Pregに基づいて、ブレーキペダル10が開放されているか否か判断する。制動オフ状態時においては、例えば、ハンドル操作が行われるなど車両状態が変化する可能性が高い。従って、制動オフ状態ではない場合には、閾値可変制御ルーチンにおける制御状態を初期状態に戻す必要はないため、ブレーキECU100は、閾値可変制御リセットルーチンを一旦終了する。
【0153】
ブレーキECU100は、制動オフ状態であると判定した場合には、ステップS204において、閾値可変制御ルーチンにおける制御状態を初期状態に戻す。従って、ブレーキECU100のマイコンのメモリに記憶されている脈動判定結果が、その初期値である「脈動無し」に戻され、制御開始閾値Xが通常制御開始閾値Xに戻される。
【0154】
この閾値可変制御リセットルーチンによれば、適切なタイミングで閾値可変制御をリセットすることができる。従って、無駄にブレーキ操作フィーリングを変えてしまうことが抑制される。
【0155】
尚、この例では、3つの条件(S201,S202,S203)が全て満たされたときに閾値可変制御をリセットするようにしているが、何れか一つの条件が成立したとき、つまり、ステップS201,S202,S203のOR条件を使って閾値可変制御をリセットするようにしてもよい。また、リセットする条件は、必ずしも、この3つを全て使用する必要はなく、そのうちの1つ、あるいは、2つを使用するようにしてもよい。
【0156】
ところで、閾値可変制御により制御開始閾値Xを増大させていった場合、制御開始閾値Xが大きくなりすぎると、目標液圧P*と検出液圧Pxとの乖離が大きくなってから、リニア制御弁67の通電制御が開始されることになる。このため、状況によっては、車両姿勢が急に変化する可能性がある。そこで、こうした課題が懸念される場合には、以下のようにするとよい。
【0157】
図20は、ブレーキECU100が実行する電流勾配制限設定ルーチンを表す。電流勾配制限設定ルーチンは、所定の短い周期で繰り返し実行される。電流勾配制限設定ルーチンが起動すると、ブレーキECU100は、ステップS301において、現在の制御開始閾値Xが基準値Xrefよりも大きいか否かを判断する。この基準値Xrefは、電流勾配制限を行う必要があるか否かを判定する閾値である。制御開始閾値Xが基準値Xref以下である場合(S301:No)には、電流勾配制限を行う必要がないため、ステップS302において、電流勾配通常モードを選択し、制御開始閾値Xが基準値Xrefよりも大きい場合(S301:Yes)には、ステップS303において、電流勾配制限モードを設定する。この基準値Xrefは、通常制御開始閾値X0以上の任意の値に設定することができる。
【0158】
電流勾配制限モードが設定されると、ブレーキECU100は、リニア制御弁67に流す電流の勾配(単位時間当たりの変化量)を、電流勾配通常モードのそれに比べて制限する。電流勾配の制限は、例えば、フィルタの特性を変更したり、目標電流i*の変化量を制限する上限値を変更することにより実施できる。例えば、電流勾配制限モードにおいては、1演算周期の間に目標電流i*を変化させることが許容される上限値である勾配上限値Δi*=(|i(n)*−i(n-1)*|)を、電流勾配通常モードにおける勾配上限値Δi*よりも小さく設定すればよい。尚、電流勾配の制限は、増加方向の勾配のみを制限するものであってもよい。
【0159】
この勾配制限は、例えば、リニア制御弁67の通電開始からの経過時間が増えるほど緩くするようにするとよい。あるいは、目標液圧P*と検出液圧Pxとの偏差ΔP(=|P*−Px|)が小さいほど勾配制限を緩くするようにしてもよい。また、ブレーキペダル操作量の微分値(例えば、ペダルストロークSpの微分値)の絶対値、あるいは、目標液圧P*の微分値の絶対値が小さいほど勾配制限を厳しくするようにしてもよい。
【0160】
図21は、電流勾配通常モードにおけるリニア制御弁67の電流波形(破線)と、電流勾配制限モードにおけるリニア制御弁67の電流波形(実線)との比較例を表す。この図から分かるように、電流勾配制限モードにおいては、電流勾配制限によりリニア制御弁67に流れる電流の急増が抑制されるため、車両姿勢が急変することを防止することができる。
【0161】
以上、本実施形態のブレーキ制御装置について説明したが、本発明は上記実施形態および変形例に限定されるものではなく、本発明の目的を逸脱しない限りにおいて種々の変更が可能である。
【0162】
例えば、本実施形態のブレーキ制御装置は、増圧リニア制御弁67Aと減圧リニア制御弁67Bとからなるリニア制御弁にて4輪のホイールシリンダ42の液圧を共通に制御するブレーキ制御装置に適用しているが、各車輪ごとに別々のリニア制御弁を設けて各輪のホイールシリンダの液圧をリニア制御弁で独立して調圧するブレーキ制御装置に適用してもよい。
【符号の説明】
【0163】
10…ブレーキペダル、20…マスタシリンダユニット、30…動力液圧発生装置、42FR,42FL,42RR,42RL…ホイールシリンダ、50…液圧制御弁装置、67A…増圧リニア制御弁、67B…減圧リニア制御弁、100…ブレーキECU、101…アキュムレータ圧センサ、102…レギュレータ圧センサ、103…制御圧センサ、104…ストロークセンサ、105…車輪速センサ、106…操舵角センサ。
【技術分野】
【0001】
本発明は、ホイールシリンダの液圧をリニア制御弁により目標液圧に制御する車両のブレーキ制御装置に関する。
【背景技術】
【0002】
一般に、この種のブレーキ制御装置においては、ホイールシリンダの目標液圧と、実際に検出した液圧である実液圧との偏差が不感帯幅を超えた場合に、リニア制御弁(増圧側リニア弁あるいは減圧側リニア弁)を駆動することにより、ホイールシリンダの液圧を目標液圧に追従するように制御する。ドラムブレーキにおいては、ドラムの回転中心軸が車輪の回転中心軸に対して偏心した状態でドラムが取り付けられている場合や、ドラムの真円度が悪い場合には、ドラムと摩擦係合部材との間に作用する力が、ドラムの回転に伴って周期的に変動する。このため、ホイールシリンダの液圧が周期的に変動し、これに応答してリニア制御弁の作動が繰り返される。そこで、特許文献1に提案されたブレーキ装置においては、ドラムブレーキ制御用の不感帯幅を、ディスクブレーキ制御用の不感帯幅よりも広く設定することにより、ホイールシリンダの液圧の脈動に起因する制御ハンチングを抑制する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−28975号公報
【発明の概要】
【0004】
上記のブレーキ装置においては、単に、ドラムブレーキであるということ、あるいは、液圧の変動が大きいということだけで、不感帯幅(制御開始閾値)を大きくするものである。このため、脈動により実際にリニア制御弁が過度に作動している状態(開閉動作を繰り返す状態)であるか否かについては適切に判断されていない。従って、リニア制御弁が過度に作動しない状態であっても、不感帯幅が大きく設定されてしまうことがあり、その場合には、ブレーキ操作フィーリングに悪影響を及ぼしてしまう。また、リニア弁制御が過度に作動している状態であっても適正な不感帯幅を設定できないこともあり、その場合には、リニア制御弁の耐久性(耐久寿命)を低下させてしまう。
【0005】
本発明は、上記問題を解決するためになされたものであり、リニア制御弁が過度に作動する状態を適切に捉えて、不感帯幅の拡大にともなうブレーキ操作フィーリングの低下を抑制しつつリニア制御弁の耐久性を向上させることを目的とする。
【0006】
上記課題を解決する本発明の特徴は、作動液の液圧を受けて車輪に制動力を与えるホイールシリンダ(42)と、ブレーキ操作量を検出するブレーキ操作量検出手段(104)と、前記ホイールシリンダに伝達される液圧を調整するリニア制御弁(67A,67B)と、前記ホイールシリンダに伝達される液圧を検出する液圧検出手段(103)と、前記液圧検出手段により検出された液圧である検出液圧と目標液圧との偏差の絶対値が制御開始閾値を超えたとき、前記検出液圧が前記目標液圧に近づくように前記リニア制御弁の駆動制御を開始する液圧制御手段(100)とを備えた車両のブレーキ制御装置において、
前記ホイールシリンダの液圧が脈動していることを検出する脈動検出手段(S31〜S37,S101〜S107)と、車両が停車中であって前記ブレーキ操作量あるいは前記目標液圧が一定に維持されるブレーキ保持状態となるときに前記リニア制御弁の作動量が正常範囲内であるということを条件として、車両が走行中であって前記ブレーキ保持状態となるときに前記液圧検出手段により液圧の脈動が検出されている場合に、前記制御開始閾値を、前記液圧の脈動が検出されていない場合における制御開始閾値を表す通常制御開始閾値よりも大きくする閾値変更手段(S11〜S20)とを備えたことにある。
【0007】
本発明においては、液圧制御手段が、検出液圧と目標液圧との偏差の絶対値が制御開始閾値を超えたとき、検出液圧が目標液圧に近づくようにリニア制御弁の駆動制御を開始する。ホイールシリンダを備えたブレーキユニットが適正でない場合、例えば、ディスクブレーキユニットであればブレーキディスクの肉厚が均一ではなかったり、ドラムブレーキユニットであればドラムの真円度が悪い場合等においては、ホイールシリンダのピストンが周期的に押されホイールシリンダの体積変動が起こって液圧が脈動する。こうした場合、液圧制御手段が検出液圧の変動を捉えてリニア制御弁を駆動制御すると、リニア制御弁が開閉動作を繰り返すため、その作動は過度なものとなり、リニア制御弁の耐久寿命が短くなってしまう。
【0008】
リニア制御弁が過度に作動する場合には、制御開始閾値を増加させることで、そうした状態を抑制することができる。一方で、制御開始閾値を増加させた場合には、ブレーキ操作フィーリングが変化するので、不必要に制御開始閾値を増加させることは回避したい。また、検出液圧の変動は、ホイールシリンダから発生するものに限らない。
【0009】
そこで本発明においては、ホイールシリンダから発生する液圧の脈動が原因となって、リニア制御弁が過度に作動する場合において、制御開始閾値を増加させる。そのために、本発明は、脈動検出手段と閾値変更手段とを備えている。
【0010】
脈動検出手段は、ホイールシリンダの液圧が脈動していることを検出する。例えば、検出液圧の変動、あるいは、検出液圧と目標液圧との偏差の変動を検出する。
【0011】
閾値変更手段は、車両が停車中であってブレーキ操作量あるいは目標液圧が一定に維持される(変動しない)ブレーキ保持状態となるときにリニア制御弁の作動量が正常範囲内であるということを条件として、車両が走行中であってブレーキ保持状態(ブレーキ操作量あるいは目標液圧が一定に維持されるブレーキ保持状態)となるときに液圧検出手段により液圧の脈動が検出されている場合に、制御開始閾値を、液圧の脈動が検出されていない場合における制御開始閾値を表す通常制御開始閾値よりも大きくする。
【0012】
経年変化によりブレーキ装置内に作動液の液漏れが生じている場合等においては、ブレーキ保持状態であっても液圧が変化してリニア制御弁が作動することがある。この場合、制御開始閾値を大きくしてしまうと、制動の遅れを招く可能性がある。そこで、本発明においては、車両が停車中であってブレーキ保持状態となるときにリニア制御弁の作動量が正常範囲内であるという条件を満たしていることを、制御開始閾値を大きくすることができる1つの要件としている。
【0013】
尚、「リニア制御弁の作動量が正常範囲内である」とは、リニア制御弁の作動量が、液漏れ等が生じている異常時における作動量と区別できる正常範囲内に入っていることを表す。この場合、リニア制御弁の作動量は、リニア制御弁の作動が正常範囲内であるか否かを判定できる物理量であればよく、例えば、単位時間あたりの作動回数や作動時間、リニア制御弁に流れる電流値等を用いることができる。また、ブレーキ保持状態とは、ブレーキ操作量あるいは目標液圧がゼロより大きな値(制動力を発生させることができる値)に一定に維持される状態を表す。
【0014】
また、車両が走行中でなければ、ホイールシリンダから液圧の脈動が発生しないため、リニア制御弁が過度に作動する状態にはならない。また、ブレーキペダルが踏み増し操作、踏み戻し操作されているときには、目標液圧が大きく変化するため、リニア制御弁に対して増圧指令あるいは減圧指令が継続され、仮に、ホイールシリンダから液圧の脈動が発生していても、リニア制御弁は過度の作動をしない。また、ブレーキペダルが踏み増し操作、踏み戻し操作されているときに制御開始閾値を大きくすると、ブレーキ操作フィーリングが変化しやすい。従って、本発明においては、こうした状況では、制御開始閾値を大きくしない。
【0015】
従って、本発明によれば、リニア制御弁が過度に作動する状態を適切に捉えて制御開始閾値を大きくすることができる。この結果、制御開始閾値の増加に伴うブレーキ操作フィーリングの低下を抑制しつつリニア制御弁の耐久性を向上させることができる。
【0016】
尚、閾値変更手段は、例えば、車両が停車中であって前記ブレーキ操作量あるいは前記目標液圧が一定に維持されるブレーキ保持状態となるときに前記リニア制御弁の作動量が正常範囲内であるということを条件として、車両が走行中であって前記ブレーキ保持状態となるときに前記液圧検出手段により液圧の脈動が検出されているか否かを判断する判断手段を備えるようにしてもよい。また、閾値変更手段は、例えば、液圧の脈動の振幅が大きいほど制御開始閾値を大きくするようにしてもよい。
【0017】
本発明の他の特徴は、前記脈動検出手段は、前記目標液圧と前記検出液圧との偏差の絶対値が前記制御開始閾値を超え、且つ、前記目標液圧と前記検出液圧との偏差の周期が車輪の1回転の周期以下である場合に、前記液圧が脈動していると判定する(S101〜S107)ことにある。
【0018】
ホイールシリンダから発生する液圧の脈動は、周期性を有し、その周期は車輪の1回転の周期以下となる。また、液圧脈動の周期は、目標液圧と検出液圧との偏差の周期として捉えることができる。一方、リニア制御弁は、目標液圧と検出液圧との偏差の絶対値が制御開始閾値を超えない状態であれば過度に作動しない。そこで、本発明においては、脈動検出手段が、目標液圧と検出液圧との偏差の絶対値が制御開始閾値を超え、且つ、目標液圧と検出液圧との偏差の周期が車輪の1回転の周期以下である場合に、液圧が脈動していると判定する(液圧が脈動していることを検出する)。従って、本発明によれば、リニア制御弁が過度に作動する状態を一層適切に捉えることができる。
【0019】
本発明の他の特徴は、前記閾値変更手段は、前記目標液圧と前記検出液圧との偏差の絶対値が前記制御開始閾値以下になるまで、前記制御開始閾値を大きくする(S102,S108)ことにある。
【0020】
本発明によれば、目標液圧と検出液圧との偏差の絶対値が制御開始閾値以下になるまで、制御開始閾値が大きくされるため、リニア制御弁の過度の作動を確実に防止することができる。この場合、例えば、閾値変更手段は、制御開始閾値を通常制御開始閾値よりも設定量だけ増加させ、目標液圧と検出液圧との偏差の絶対値が制御開始閾値以下になるまで、制御開始閾値を前記設定量ずつ増加させるようにしてもよい。
【0021】
本発明の他の特徴は、前記脈動検出手段は、前記目標液圧と前記検出液圧との偏差の絶対値が基準値を下回っている状態から上回る状態に変化する周期、あるいは、基準値を上回っている状態から下回る状態に変化する周期が、車輪の1回転の周期以下である場合に、前記目標液圧と前記検出液圧との偏差の周期が車輪の1回転の周期以下であると判定する(S121〜S128)ことにある。
【0022】
本発明においては、目標液圧と検出液圧との偏差の絶対値と、基準値との比較結果(大小関係)の切り替わるタイミングを捉えて検出液圧の周期を検出するため、検出液圧の周期を簡単に検出することができる。また、検出液圧のサンプリングデータを長期間のあいだ記憶しておく必要がないため、データ記憶容量が少なくてすむ。
【0023】
本発明の他の特徴は、前記基準値は、前記通常制御開始閾値の半分以下に設定されることにある。
【0024】
本発明によれば、目標液圧に対して、検出液圧の脈動の中心が相対的に変動しても、検出液圧の周期を適正に検出することができる。
【0025】
本発明の他の特徴は、車両が停車中であって前記ブレーキ保持状態となるときに、設定時間内における前記リニア制御弁の作動回数を検出し、前記検出した作動回数が基準回数以下である場合に、前記リニア制御弁の作動量が正常範囲内であると判定する正常判定手段(S51〜S63)を備えたことにある。
【0026】
経年変化によりブレーキ装置内に作動液の液漏れが生じている場合等においては、ブレーキ保持状態であっても液圧が変化してリニア制御弁が作動することがある。本発明においては、ホイールシリンダから発生する液圧の脈動と、液漏れ等の原因による液圧の脈動とを区別するために、正常判定手段が、車両が停車中であってブレーキ保持状態となるときに、設定時間内におけるリニア制御弁の作動回数を検出し、検出した作動回数が基準回数以下である場合に、リニア制御弁の作動量が正常範囲内であると判定する。従って、本発明によれば、ホイールシリンダから発生する液圧の脈動と、液漏れ等の他の要因にて発生する液圧の脈動とを簡単に区別することができる。これにより、リニア制御弁が過度に作動する状態を適切に捉えて制御開始閾値を大きくすることができる。
【0027】
本発明の他の特徴は、前記制御開始閾値が前記通常制御開始閾値よりも大きく設定されている場合には、前記リニア制御弁の制御量の変化勾配を小さくする勾配制限手段を備えたことにある。
【0028】
制御開始閾値が通常制御開始閾値よりも大きく設定されている場合には、目標液圧と検出液圧との偏差が大きくなってから、リニア制御弁の駆動制御が開始されることになる。このため、状況によっては、リニア制御弁に通電する電流が急変して車両姿勢が急に変化する可能性がある。そこで、本発明においては、勾配制限手段が、制御開始閾値が通常制御開始閾値よりも大きく設定されている場合には、通常制御開始値に設定されている場合に比べてリニア制御弁の制御量(例えば、電流値)の変化勾配を小さくする。これにより、リニア制御弁に流す電流の変化が制限されて車両姿勢の急変を抑制することができる。尚、リニア制御弁の制御量の変化勾配を小さくするタイミングは、必ずしも、制御開始閾値が通常制御開始閾値を超えるタイミングにする必要はなく、例えば、制御開始閾値が通常制御開始閾値よりも大きな基準値を超えた段階から開始するようにしてもよい。
【0029】
本発明の他の特徴は、車両が旋回したこと、車速が基準速度以下に低下したこと、ブレーキペダル操作が解除されたことの少なくとも1つが検出されたとき、前記閾値変更手段により変更された制御開始閾値を通常制御開始閾値に戻すリセット手段(S201〜S204)を備えたことにある。
【0030】
例えば、複数輪のホイールシリンダの液圧を1つの液圧系統で制御しているシステムにおいては、車両が旋回して内輪差あるいは外輪差が生じた場合、複数輪のホイールシリンダで発生していた液圧の脈動の位相が互いにずれて検出液圧の脈動の状態が変化することがある。また、車速が小さい場合には大きい場合に比べて、液圧の脈動が発生しにくい状況となる。また、ブレーキペダル操作が解除された場合には、ハンドル操作が行われるなど車両状態が変化する可能性が高い。そこで、本発明においては、リセット手段が、車両が旋回したこと、車速が基準速度以下に低下したこと、ブレーキペダル操作が解除されたことの少なくとも1つが検出されたとき、閾値変更手段により変更された制御開始閾値を通常制御開始閾値に戻す。
【0031】
例えば、液圧の脈動の大きさに応じて増加させた制御開始閾値を記憶し、ブレーキ保持状態となる度に、その記憶した制御開始閾値を使用するシステムを構成した場合には、リセット手段を備えることで、適切なタイミングで制御開始閾値を通常制御開始閾値に戻すことができる。これにより、無駄にブレーキ操作フィーリングを変えてしまうことが抑制される。
【0032】
尚、上記説明においては、発明の理解を助けるために、実施形態に対応する発明の構成に対して、実施形態で用いた符号を括弧書きで添えているが、発明の各構成要件は前記符号によって規定される実施形態に限定されるものではない。
【図面の簡単な説明】
【0033】
【図1】本実施形態におけるブレーキ制御装置の概略システム構成図である。
【図2】液圧脈動の伝搬経路を表す説明図である。
【図3】リニア制御弁が過度に作動している状態を表すグラフである。
【図4】閾値可変制御ルーチンを表すフローチャートである。
【図5】脈動検出ルーチンを表すフローチャートである。
【図6】停車時リニア制御弁作動確認ルーチンを表すフローチャートである。
【図7】制御開始閾値Xの変化を表すグラフである。
【図8】検出液圧の応答遅れを表すグラフである。
【図9】閾値可変制御ルーチンにおける変形部分の処理を表すフローチャートである。
【図10】検出液圧の脈動を表すグラフである。
【図11】目標液圧の変動を表すグラフである。
【図12】液漏れにより変化する検出液圧を表すグラフである。
【図13】脈動周期を求める方法を表すグラフである。
【図14】車速と車輪の1回転の周期との関係を表すグラフである。
【図15】検出液圧と目標液圧との関係を表すグラフである。
【図16】第2実施形態の脈動検出ルーチンを表すフローチャートである。
【図17】第2実施形態の脈動周期検出ルーチンを表すフローチャートである。
【図18】第2実施形態の制御開始閾値の変化を表すグラフである。
【図19】閾値可変制御リセットルーチンを表すフローチャートである。
【図20】電流勾配制限設定ルーチンを表すフローチャートである。
【図21】リニア制御弁の電流変化を表すグラフである。
【発明を実施するための形態】
【0034】
以下、本発明の一実施形態に係る車両のブレーキ制御装置について図面を用いて説明する。図1は、本実施形態に係る車両のブレーキ制御装置の概略システム構成図である。
【0035】
本実施形態のブレーキ制御装置は、ブレーキペダル10と、マスタシリンダユニット20と、動力液圧発生装置30と、液圧制御弁装置50と、各車輪にそれぞれ設けられるブレーキユニット40FR,40FL,40RR,40RLと、ブレーキ制御を司るブレーキECU100とを備える。ブレーキユニット40FR,40FL,40RR,40RLは、ブレーキディスク41FR,41FL,41RR,41RLとブレーキキャリパに内蔵されたホイールシリンダ42FR,42FL,42RR,42RLとを備える。尚、ブレーキユニット40は、4輪ともにディスクブレーキ式に限るものではなく、例えば、4輪ともドラムブレーキ式であってもよいし、前輪がディスクブレーキ式、後輪がドラムブレーキ式など任意に組み合わせたものでもよい。
【0036】
以下、車輪毎に設けられる構成については、その符号の末尾に、右前輪についてはFR、左前輪についてはFL、右後輪についてはRR、左後輪についてはRLを付しているが、以下、車輪位置を特定しない場合には、末尾の符号を省略する。
【0037】
ホイールシリンダ42FR,42FL,42RR,42RLは、液圧制御弁装置50に接続され、液圧制御弁装置50から供給される作動液(ブレーキフルード)の液圧が伝達され、この液圧により、車輪と共に回転するブレーキディスク41FR,41FL,41RR,41RLにブレーキパッドを押し付けて車輪に制動力を付与する。
【0038】
マスタシリンダユニット20は、液圧ブースタ21、マスタシリンダ22、レギュレータ23、リザーバ24を備える。液圧ブースタ21は、ブレーキペダル10に連結されており、ブレーキペダル10に加えられたペダル踏力を増幅してマスタシリンダ22に伝達する。液圧ブースタ21は、動力液圧発生装置30からレギュレータ23を介して作動液が供給されることにより、ペダル踏力を増幅してマスタシリンダ22に伝達する。マスタシリンダ22は、ペダル踏力に対して所定の倍力比を有するマスタシリンダ圧を発生する。
【0039】
マスタシリンダ22とレギュレータ23との上部には、作動液を貯留するリザーバ24が設けられている。マスタシリンダ22は、ブレーキペダル10の踏み込みが解除されているときにリザーバ24と連通する。レギュレータ23は、リザーバ24と動力液圧発生装置30のアキュムレータ32との双方に連通し、リザーバ24を低圧源とするとともにアキュムレータ32を高圧源として、マスタシリンダ圧とほぼ等しい液圧を発生する。以下、レギュレータ23の液圧を、レギュレータ圧と呼ぶ。尚、マスタシリンダ圧とレギュレータ圧とは厳密に同一にする必要はなく、例えば、レギュレータ圧をマスタシリンダ圧よりも若干高圧になるように設定してもよい。
【0040】
動力液圧発生装置30は、動力液圧源であって、ポンプ31とアキュムレータ32とを備える。ポンプ31は、その吸入口がリザーバ24に接続され、吐出口がアキュムレータ32に接続され、モータ33を駆動することにより作動液を加圧する。アキュムレータ32は、ポンプ31により加圧された作動液の圧力エネルギーを窒素等の封入ガスの圧力エネルギーに変換して蓄える。また、アキュムレータ32は、マスタシリンダユニット20に設けられたリリーフバルブ25に接続されている。リリーフバルブ25は、作動液の圧力が異常に高まった場合には、開弁して作動液をリザーバ24に戻す。
【0041】
このように、ブレーキ制御装置は、ホイールシリンダ42に作動液の液圧を付与する液圧源として、ドライバーのブレーキ踏力(ブレーキペダル10を踏み込む力)を利用したマスタシリンダ22、レギュレータ23と、ドライバーのブレーキ踏力とは無関係に液圧を付与する動力液圧発生装置30とを備えている。マスタシリンダ22、レギュレータ23、動力液圧発生装置30は、マスタ配管11、レギュレータ配管12、アキュムレータ配管13を介してそれぞれ液圧制御弁装置50に接続される。また、リザーバ24は、リザーバ配管14を介して液圧制御弁装置50に接続される。
【0042】
液圧制御弁装置50は、各ホイールシリンダ42FR,42FL,42RR,42RLに接続される4つの個別流路51FR,51FL,51RR,51RLと、個別流路51FR,51FL,51RR,51RLを連通する主流路52と、主流路52とマスタ配管11とを接続するマスタ流路53と、主流路52とレギュレータ配管12とを接続するレギュレータ流路54と、主流路52とアキュムレータ配管13とを接続するアキュムレータ流路55とを備える。マスタ流路53とレギュレータ流路54とアキュムレータ流路55とは、主流路52に対して並列に接続される。
【0043】
各個別流路51FR,51FL,51RR,51RLには、その途中にそれぞれABS保持弁61FR,61FL,61RR,61RLが設けられる。ABS保持弁61は、ソレノイドの非通電時にスプリングの付勢力により開弁状態を維持し、ソレノイドの通電中においてのみ閉弁状態となる常開式電磁開閉弁である。ABS保持弁61は、開弁状態においては、作動液を双方向に流すことができ方向性を有さない。
【0044】
また、各個別流路51FR,51FL,51RR,51RLには、ABS保持弁61FR,61FL,61RR,61RLと並列にリターンチェック弁62FR,62FL,62RR,62RLが設けられる。リターンチェック弁62は、主流路52からホイールシリンダ42に向かう作動液の流れを遮断し、ホイールシリンダ42から主流路52に向かう作動液の流れを許容する弁である。つまり、ホイールシリンダ42の液圧(ホイールシリンダ圧と呼ぶ)が主流路52の液圧よりも高圧となる場合に機械的に弁体が開いてホイールシリンダ42の作動液を主流路52側に流し、ホイールシリンダ圧が主流路52の液圧と等しくなると弁体が閉弁するように構成されている。従って、ABS保持弁61が閉弁されてホイールシリンダ圧が保持されているときに、主流路52における制御液圧が低下してホイールシリンダ圧を下回った場合には、ABS保持弁61を閉弁状態に維持したままホイールシリンダ圧を主流路52の制御液圧にまで減圧することができる。
【0045】
また、各個別流路51FR,51FL,51RR,51RLには、それぞれ減圧用個別流路56FR,56FL,56RR,56RLが接続される。各減圧用個別流路56は、リザーバ流路57に接続される。リザーバ流路57は、リザーバ配管14を介してリザーバ24に接続される。各減圧用個別流路56FR,56FL,56RR,56RLには、その途中にそれぞれABS減圧弁63FR,63FL,63RR,63RLが設けられている。各ABS減圧弁63は、ソレノイドの非通電時にスプリングの付勢力により閉弁状態を維持し、ソレノイドの通電中においてのみ開弁状態となる常閉式電磁開閉弁である。各ABS減圧弁63は、開状態において作動液をホイールシリンダ42から減圧用個別流路56を介してリザーバ流路57に流すことでホイールシリンダ圧を低下させる。
【0046】
ABS保持弁61およびABS減圧弁63は、車輪がロックしてスリップした場合に、ホイールシリンダ圧を下げて車輪のロックを防止するアンチロックブレーキ制御の作動時などにおいて開閉制御される。
【0047】
主流路52には、その途中に連通弁64が設けられる。連通弁64は、ソレノイドの非通電時にスプリングの付勢力により閉弁状態を維持し、ソレノイドの通電中においてのみ開弁状態となる常閉式電磁開閉弁である。主流路52は、連通弁64を境として、一方側がマスタ流路53に接続される第1主流路521、他方側がレギュレータ流路54およびアキュムレータ流路55に接続される第2主流路522に区分けされる。連通弁64が閉弁状態にあるときには、第1主流路521と第2主流路522との間の作動液の流通が遮断され、連通弁64が開弁状態にあるときには、第1主流路521と第2主流路522との間の作動液の流通が双方向に許容される。
【0048】
マスタ流路53には、その途中にマスタカット弁65が設けられる。マスタカット弁65は、ソレノイドの非通電時にスプリングの付勢力により開弁状態を維持し、ソレノイドの通電中においてのみ閉弁状態となる常開式電磁開閉弁である。マスタカット弁65が閉弁状態にあるときには、マスタシリンダ22と第1主流路521との間の作動液の流通が遮断され、マスタカット弁65が開弁状態にあるときには、マスタシリンダ22と第1主流路521との間の作動液の流通が双方向に許容される。
【0049】
マスタ流路53には、マスタカット弁65が設けられる位置よりもマスタシリンダ22側において、シミュレータ流路71が分岐して設けられる。シミュレータ流路71には、シミュレータカット弁72を介してストロークシミュレータ70が接続される。シミュレータカット弁72は、ソレノイドの非通電時にスプリングの付勢力により閉弁状態を維持し、ソレノイドの通電中においてのみ開弁状態となる常閉式電磁開閉弁である。シミュレータカット弁72が閉弁状態にあるときには、マスタ流路53とストロークシミュレータ70との間の作動液の流通が遮断され、シミュレータカット弁72が開弁状態にあるときには、マスタ流路53とストロークシミュレータ70との間の作動液の流通が双方向に許容される。
【0050】
ストロークシミュレータ70は、複数のピストンやスプリングを備えており、シミュレータカット弁72が開弁状態にあるときに、ブレーキ操作量に応じた量の作動液を内部に導入してブレーキペダル10のストローク操作を可能にするとともに、ペダル操作量に応じた反力を発生させて、ドライバーのブレーキ操作フィーリングを良好にするものである。
【0051】
レギュレータ流路54には、その途中にレギュレータカット弁66が設けられる。レギュレータカット弁66は、ソレノイドの非通電時にスプリングの付勢力により開弁状態を維持し、ソレノイドの通電中においてのみ閉弁状態となる常開式電磁開閉弁である。レギュレータカット弁66が閉弁状態にあるときには、レギュレータ23と第2主流路522との間の作動液の流通が遮断され、レギュレータカット弁66が開弁状態にあるときには、レギュレータ23と第2主流路522との間の作動液の流通が双方向に許容される。
【0052】
アキュムレータ流路55には、その途中に増圧リニア制御弁67Aが設けられる。また、アキュムレータ流路55が接続される第2主流路522は、減圧リニア制御弁67Bを介してリザーバ流路57に接続される。増圧リニア制御弁67Aおよび減圧リニア制御弁67Bは、ソレノイドの非通電時にスプリングの付勢力により閉弁状態を維持し、ソレノイドへの通電量(電流値)の増加にしたがって開度を増加させる常閉式電磁リニア制御弁である。増圧リニア制御弁67Aおよび減圧リニア制御弁67Bは、スプリングが弁体を閉弁方向に付勢する力と、一次側(入口側)と二次側(出口側)の差圧により弁体が開弁方向に付勢される力との差分である閉弁力により閉弁状態を維持し、ソレノイドへの通電により発生する弁体を開弁させる力が、この閉弁力を上回った場合に、弁体に働く力のバランスに応じた開度で開弁する。従って、ソレノイドへの通電量(電流値)を制御することにより開度を調整することができる。この増圧リニア制御弁67Aおよび減圧リニア制御弁67Bは、本発明におけるリニア制御弁に相当する。以下、増圧リニア制御弁67Aと減圧リニア制御弁67Bについて、両者を区別する必要が無い場合には、それらをリニア制御弁67と総称する。
【0053】
動力液圧発生装置30および液圧制御弁装置50は、ブレーキECU100により駆動制御される。ブレーキECU100は、マイコンを主要部として備えるとともに、ポンプ駆動回路、電磁弁駆動回路、各種のセンサ信号を入力する入力インターフェース、通信インターフェース等を備えている。液圧制御弁装置50に設けられた電磁開閉弁、リニア制御弁67は、全てブレーキECU100に接続され、ブレーキECU100から出力されるソレノイド駆動信号により開閉状態および開度(リニア制御弁67の場合)が制御される。また、動力液圧発生装置30に設けられたモータ33についても、ブレーキECU100に接続され、ブレーキECU100から出力されるモータ駆動信号により駆動制御される。
【0054】
液圧制御弁装置50には、アキュムレータ圧センサ101、レギュレータ圧センサ102、制御圧センサ103が設けられる。アキュムレータ圧センサ101は、増圧リニア制御弁67Aよりも動力液圧発生装置30側(上流側)のアキュムレータ流路55における作動液の圧力であるアキュムレータ圧Paccを検出する。アキュムレータ圧センサ101は、検出したアキュムレータ圧Paccを表す信号をブレーキECU100に出力する。ブレーキECU100は、アキュムレータ圧Paccを所定の周期で読み込み、アキュムレータ圧Paccが予め設定した最低設定圧を下回る場合にはモータ33を駆動してポンプ31により作動液を加圧し、常にアキュムレータ圧Paccが設定圧範囲内に維持されるように制御する。
【0055】
レギュレータ圧センサ102は、レギュレータカット弁66よりもレギュレータ23側(上流側)のレギュレータ流路54における作動液の圧力であるレギュレータ圧Pregを検出する。レギュレータ圧センサ102は、検出したレギュレータ圧Pregを表す信号をブレーキECU100に出力する。制御圧センサ103は、第1主流路521における作動液の圧力である制御圧Pxを表す信号をブレーキECU100に出力する。
【0056】
また、ブレーキECU100には、ブレーキペダル10に設けられたストロークセンサ104が接続される。ストロークセンサ104は、ブレーキペダル10の踏み込み量(操作量)であるペダルストロークを検出し、検出したペダルストロークSpを表す信号をブレーキECU100に出力する。また、ブレーキECU100には、車輪速センサ105、操舵角センサ106が接続される。車輪速センサ105は、左右前後輪の回転速度である車輪速を検出し、検出した車輪速Vxを表す信号をブレーキECU100に出力する。車輪速Vxは、後述する車輪の回転周期の検出、および、車速の検出に使用される。また、操舵角センサ106は、車両の操舵角を検出し、検出した操舵角θを表す信号をブレーキECU100に出力する。
【0057】
次に、ブレーキECU100が実行するブレーキ制御について説明する。ブレーキECU100は、動力液圧発生装置30の出力する液圧をリニア制御弁67にて調圧してホイールシリンダ42に伝達するリニア制御モードと、ドライバーの踏力により発生した液圧をホイールシリンダに伝達するバックアップモードとの少なくとも2つの制動モードによるブレーキ制御を選択的に実行する。本実施形態における特徴は、リニア制御モードにおいて適用されるものであるため、バックアップモードについての説明は省略する。
【0058】
リニア制御モードにおいては、マスタカット弁65、レギュレータカット弁66は、ソレノイドへの通電により閉弁状態に維持され、連通弁64は、ソレノイドへの通電により開弁状態に維持される。また、シミュレータカット弁72は、ソレノイドへの通電により開弁状態に維持される。また、増圧リニア制御弁67Aおよび減圧リニア制御弁67Bは、ソレノイドが通電制御状態におかれて、通電量に応じた開度に制御される。また、ABS保持弁61およびABS減圧弁63については、アンチロックブレーキ制御など必要に応じて開閉され、通常においては、ABS保持弁61は開弁状態に維持され、ABS減圧弁63は閉弁状態に維持される。
【0059】
リニア制御モードにおいては、マスタカット弁65およびレギュレータカット弁66が閉弁されるため、マスタシリンダユニット20から出力される液圧は、ホイールシリンダ42に伝達されない。また、連通弁64が開弁状態に維持され、増圧リニア制御弁67Aおよび減圧リニア制御弁67Bが通電制御状態におかれる。このため、動力液圧発生装置30の出力する液圧(アキュムレータ圧)が増圧リニア制御弁67Aと減圧リニア制御弁67Bにより調圧されて4輪のホイールシリンダ42に伝達される。この場合、各ホイールシリンダ42は、主流路52により連通されているため、ホイールシリンダ圧が4輪全て同じ値となる。このホイールシリンダ圧は、制御圧センサ103により検出することができる。
【0060】
本実施形態のブレーキ制御装置が設けられる車両は、例えば、バッテリ電源により駆動されるモータと、ガソリン燃料により駆動される内燃機関とを備えたハイブリッド車両である。ハイブリッド車両においては、車輪の回転力でモータを発電させ、この発電電力をバッテリに回生させることにより制動力を得る回生制動を行っている。こうした回生制動を行う場合には、車両を制動させるために必要な総制動力から回生による制動力分を除いた制動力をブレーキ制御装置で発生させることにより、回生制動と液圧制動とを併用したブレーキ回生協調制御を行うことができる。
【0061】
ブレーキECU100は、制動要求を受けてブレーキ回生協調制御を開始する。制動要求は、例えばドライバーがブレーキペダル10を踏み込み操作した場合など、車両に制動力を付与すべき時において発生する。ブレーキECU100は、制動要求を受けると、ペダルストロークセンサ104により検出されるペダルストロークSpに基づいて目標制動力を演算する。目標制動力は、ペダルストロークSpが大きいほど大きな値に設定される。尚、ストロークセンサ104により検出されるペダルストロークSpに代えて、レギュレータ圧センサ102により検出されるレギュレータ圧Pregに基づいてブレーキ操作量を検出する構成であっても良い。また、他にもブレーキペダル10の踏み込み力を検出する踏力センサを設けて、踏力に基づいてブレーキ操作量を検出する構成であって良い。
【0062】
ブレーキECU100は、演算した目標制動力を表す情報をハイブリッドECU(図示略)に送信する。ハイブリッドECUは、目標制動力のうち、電力回生により発生させた制動力を演算して、その演算結果である回生制動力を表す情報をブレーキECU100に送信する。これにより、ブレーキECU100は、目標制動力から回生制動力を減算することによりブレーキ制御装置で発生させるべき制動力である目標液圧制動力を演算する。ハイブリッドECUで行う電力回生により発生する回生制動力は、モータの回転速度により変化するだけでなく、バッテリの充電状態(SOC)等によっても回生電流制御により変化する。従って、目標制動力から回生制動力を減算することにより、適切な目標液圧制動力を演算することができる。
【0063】
ブレーキECU100は、演算した目標液圧制動力に基づいて、この目標液圧制動力に対応した各ホイールシリンダ42の目標液圧を演算し、ホイールシリンダ圧が目標液圧と等しくなるように、フィードバック制御により増圧リニア制御弁67Aと減圧リニア制御弁67Bの駆動電流を制御する。つまり、制御圧センサ103により検出される制御圧Px(=ホイールシリンダ圧)が目標液圧に追従するように、増圧リニア制御弁67Aと減圧リニア制御弁67Bの各ソレノイドに流す電流を制御する。
【0064】
これにより、作動液が動力液圧発生装置30から増圧リニア制御弁67Aを介して各ホイールシリンダ42に供給され、車輪に制動力が発生する。また、必要に応じてホイールシリンダ42から作動液が減圧リニア制御弁67Bを介して排出され、車輪に発生する制動力が調整される。
【0065】
尚、本発明は、ブレーキ回生協調制御を行うことを必須とするものではないため、回生制動力を発生させない車両においても適用することができる。この場合には、ブレーキ操作量に基づいて目標液圧を直接演算すればよい。目標液圧は、例えば、マップや計算式等を使って、ブレーキ操作量が大きくなるほど大きな値に設定される。
【0066】
上述したように、ブレーキECU100は、リニア制御モードにおいて、制御圧センサ103により検出される制御圧Px(以下、検出液圧Pxと呼ぶ)が目標液圧P*に追従するように、リニア制御弁67(増圧リニア制御弁67と減圧リニア制御弁67B)の各ソレノイドに流す電流を制御する。ブレーキECU100は、こうした電流制御を行うにあたって、リニア制御弁67を通電しない不感帯を設定している。不感帯は、目標液圧P*を中心としてプラス側とマイナス側とにおいて所定の幅で設定される。ブレーキECU100は、検出液圧Pxが不感帯に入っている場合には、リニア制御弁67を通電しなく、検出液圧Pxが不感帯から外れると、目標液圧P*と検出液圧Pxとの偏差に応じて、偏差をゼロに近づけるようにリニア制御弁67の通電を制御する。例えば、目標液圧P*と検出液圧Pxとの偏差(P*−Px)を用いたPID制御などのフィードバック制御を行う。
【0067】
この不感帯の境界が、リニア制御弁67の通電が開始される点となるため、本実施形態においては、目標液圧P*から不感帯の境界までの幅を制御開始閾値Xと呼ぶ。尚、制御開始閾値を、目標液圧P*±(不感帯幅)と定義してもよい。本実施形態においては、不感帯の幅を可変するため、説明が煩雑にならないように、目標液圧から不感帯の境界までの幅を制御開始閾値と定義し、不感帯の幅を可変することを制御開始閾値を可変することと同一の意味として取り扱う。また、本実施形態においては、制御開始閾値は、目標液圧P*に対してプラス側の値とマイナス側の値とを同一にしているが、それぞれ異なるようにしてもよい。
【0068】
ブレーキユニット40においては、回転するブレーキディスク41にブレーキパッドを押しつけて車輪に制動力を付与するが、ブレーキパッドとブレーキディスク41との摺動に伴って、ブレーキディスク41の肉厚が薄くなり、肉厚差が生じることがある。この場合には、ブレーキディスク41が回転しているときに、その肉厚差によりホイールシリンダ42内のピストンが動かされ、ホイールシリンダ42の液圧が脈動する。
【0069】
本実施形態においては、ディスクブレーキを使用しているが、それに代えて、ドラムブレーキを使用することもできる。ドラムブレーキの場合には、車輪と一体的に回転可能なドラムと、ドラムの内側に設けられた一対のシューと、シューを拡開させるホイールシリンダとを備えており、ホイールシリンダに液圧が供給されることにより一対のシューが拡開してドラムの内周面を押しつけて車輪に制動力を付与する。ドラムブレーキの場合には、ドラムの回転中心軸が車輪の回転中心軸に対して偏心した状態でドラムが取り付けられている場合や、ドラムの真円度が悪い場合には、ドラムが回転しているときに、ホイールシリンダのピストンが動かされて、ホイールシリンダの液圧が脈動する。
【0070】
従って、ディスクブレーキ、ドラムブレーキの何れにおいても、上記の状況が発生した場合にはブレーキ振動が発生する。また、液圧の脈動は、図2に示す伝搬経路(左後輪の例)にて制御圧センサ103に伝達される。このため、図3の上段のグラフに示すように、検出液圧Pxが脈動し、検出液圧Pxと目標液圧P*との偏差が制御開始閾値Xを周期的に超えるようになると、図3の下段のグラフに示すように、リニア制御弁67が開弁動作と閉弁動作とを繰り返す。つまり、リニア制御弁67が過度に作動してしまう。これにより、リニア制御弁67の耐久寿命が低下する。
【0071】
そこで、本実施形態においては、リニア制御弁67が過度に作動する状態であるか否かを判断し、リニア制御弁67が過度に作動する状態であると判断した場合には、制御開始閾値Xを大きくして、リニア制御弁67が過度に作動しないようにする。
【0072】
この場合、単に、作動液の脈動が検出されたということだけで、制御開始閾値Xを大きくしてしまうと、適切なものとならない。例えば、制御開始閾値Xを大きくする必要がない状態において制御開始閾値Xを大きくしてしまうと、無駄にブレーキ操作フィーリングを低下させてしまうことになる。逆に、制御開始閾値Xを大きくする必要があるにも関わらず、その増大量が不足してしまうと、リニア制御弁67の過度の作動を適切に抑制することができなる。
【0073】
本実施形態においては、リニア制御弁67が過度に作動する状態であると判断する条件、つまり、制御開始閾値Xを増大させる制御(閾値増大制御と呼ぶ)を開始する条件が4つ設定されている。以下、この4つの条件について説明する。
【0074】
<第1条件>
第1条件は、ブレーキ操作量あるいは目標液圧P*が一定に維持されている状態になっていることである。つまり、ブレーキペダル10の踏み込み量が変動せずに一定となるペダル保持操作状態であること、あるいは、目標液圧P*が変動せずに一定(制動力を発生できる値での一定)に維持されていることを第1条件としている。以下、ブレーキ操作量あるいは目標液圧P*が一定に維持されている状態をブレーキ保持状態と呼ぶ。ブレーキペダル10の踏み増し時あるいは踏み戻し時、もしくは、目標液圧P*の増加時あるいは減少時においては、目標液圧P*が変化していくため、ブレーキECU100は増圧指令、あるいは減圧指令を継続して出力する。このため、ホイールシリンダ42において液圧の脈動が発生していても、リニア制御弁67が過度に作動する(開閉動作を繰り返す)ことはない。従って、ブレーキペダル10の踏み増し時あるいは踏み戻し時、もしくは、目標液圧P*の増加時あるいは減少時は、リニア制御弁67が過度に作動する状態ではない。
【0075】
また、ブレーキペダル10の踏み増し時あるいは踏み戻し時、もしくは、目標液圧P*の増加時あるいは減少時に閾値増大制御を開始してしまうと、ブレーキ操作フィーリングが変化しやすい。一方、ドライバーのペダル操作意志の少ないブレーキ保持状態においては、ブレーキ操作フィーリングの変化を非常に小さくすることができる。従って、ブレーキ保持状態においては、閾値増大制御を行うことができる。
【0076】
<第2条件>
第2条件は、車両が走行していることである。車両が走行していない状態においては、車輪が回転しないため(ブレーキディスク41あるいはブレーキドラムが回転しないため)ホイールシリンダ42内のピストンが動かされず、液圧脈動は発生しない。従って、ホイールシリンダ42内のピストンが動かされる状況となる車両走行中であることが第2条件として設定される。
【0077】
<第3条件>
第3条件は、液圧の脈動が検出されていることである。検出できない程度の大きさの脈動であれば、リニア制御弁67は過度に作動しない。従って、液圧の脈動が検出されていることが第3条件として設定される。尚、後述するように、振幅条件など所定の脈動判定条件が満足されているときに、液圧が脈動していると判定される。
【0078】
<第4条件>
第4条件は、車両が停車中でブレーキ保持状態となっているときにリニア制御弁67が殆ど作動していないことである。弁等の部品の経年劣化により液漏れが生じると、ブレーキ保持状態であっても、液圧が変化しリニア制御弁67が作動する。また、作動液の粘度が非常に高い状況においても、作動液の流れが悪くなって、ブレーキ保持状態であっても、液圧が変化してリニア制御弁67が作動することもある。このような状況において、制御開始閾値を増加させてしまうと、制動の低下や制動のかかり過ぎが発生することがある。そこで、車両走行中でブレーキ保持状態となっているときに、リニア制御弁67が作動する場合には、それがブレーキユニット40の不均衡な構造(ブレーキディスクの肉厚の不均一、ドラムの真円度不良等)に起因するものなのか、液漏れ等の他の要因によるものかを判別する必要がある。
【0079】
ブレーキユニット40の不均衡な構造に起因する脈動は、停車中においては発生しない。そこで、車両停車中でブレーキ保持状態となっているときにリニア制御弁67が作動した場合には、液漏れ等の他の要因によるものであると判定することができる。従って、第4条件は、液漏れ等の他の要因でリニア制御弁67が作動する状況に対して閾値増大制御が行われないように制限するものである。
【0080】
次に、ブレーキECU100の実行する閾値可変制御処理について説明する。図4は、閾値可変制御ルーチンを表すフローチャートである。閾値可変制御ルーチンは、上述したブレーキ制御(リニア制御弁67の通電制御)と並行して、所定の短い周期にて繰り返し実行される。
【0081】
閾値可変制御ルーチンが起動すると、ブレーキECU100は、ステップS11において、ストロークセンサ104により検出されるペダルストロークSpを読み込む。続いて、ステップS12において、ペダルストロークSpおよびペダルストロークSpの微分値(単位時間あたりの変化量)に基づいて、ブレーキペダル10が保持操作中であるか否かを判断する。このステップS11,ステップS12は、第1条件を満たしているか否かを判断する処理である。ペダルストロークSpが操作有無判定基準値より大きく、かつ、ペダルストロークSpの微分値Sp’の絶対値が保持判定基準値A以下である場合には、ブレーキペダル10が保持操作中であると判定する(S12:Yes)。つまり、第1条件を満たしていると判定する。ペダルストロークSpが操作有無判定基準値以下、あるいは、ペダルストロークSpの微分値Sp’の絶対値が保持判定基準値Aを超える場合には、ブレーキペダル10が保持操作中でない、つまり、第1条件を満たしていないと判定する(S12:No)。
【0082】
このステップS11,S12の処理は、ブレーキペダル10の操作量、および、その変化を検出するものであるため、ペダルストロークSp代えて、レギュレータ圧センサ102により検出されるレギュレータ圧Preg、および、その微分値を使って判断してもよい。また、ブレーキペダル操作量に代えて、目標液圧P*を用いて、ブレーキ保持状態(目標液圧P*が一定)を検出するようにしてもよい。この場合、ブレーキECU100は、ステップS11において、ブレーキ制御で演算される目標液圧P*を読み込み、ステップS12において、目標液圧P*がブレーキ発生判定基準値よりも大きく、かつ、目標液圧P*の微分値(単位時間あたりの変化量)の絶対値が保持判定基準値以下である場合に、ブレーキ保持状態であると判定するようにすればよい。
【0083】
ブレーキECU100は、ステップS12において、第1条件を満たしていないと判定した場合は、ステップS13において、制御開始閾値Xを通常制御開始閾値X0に設定する。この通常制御開始閾値X0は、制御開始閾値を増加させていない通常の値を表す。
【0084】
ブレーキECU100は、ステップS12において、第1条件を満たしていると判定した場合は、ステップS14において、車輪速センサ105により検出される車輪速Vxを読み込む。続いて、ステップS15において、車輪速Vxに基づいて、車両が走行中であるか否かを判断する。例えば、車輪速Vxがゼロより大きいか否かを判断する。車輪速センサ105は、各車輪ごとの車輪速Vxを検出するが、ここでは、任意の車輪の車輪速Vxを読み込んでもよいし、4輪の車輪速Vxを読み込んで、その平均値を車輪速Vxとしてもよく、車両の走行状態を判断できるものであればよい。このステップS13,S14は、第2条件を満たしているか否かを判断する処理である。
【0085】
車両が走行中でない場合は(S15:No)、ブレーキユニット40の不均衡な構造に起因する液圧脈動が発生する状況ではないため、ブレーキECU100は、その処理をステップS13に進めて、制御開始閾値Xを通常制御開始閾値X0に設定する。尚、車両が走行中であるか否かの判定については、車輪速センサ105以外のセンサを用いて行うことができる。例えば、車輪速センサ105に代えて、車両の前後方向の加速度を検出する加速度センサ(図示略)の検出値を読み込み、前後方向の加速度が検出されている場合に、車両が走行中であると判断するようにしてもよい。
【0086】
ブレーキECU100は、車両が走行中である場合は(S15:Yes)、ステップS16において、脈動検出処理を行い、続くステップS17において、脈動検出処理の判定結果を読み込み、脈動が検出されているか否かを判断する。このステップS16,S17の処理は、第3条件を満たしているか否かを判断する処理である。脈動が検出されていない場合には(S17:No)、制御開始閾値Xを大きくする必要が無いため、ステップS13において、制御開始閾値Xを通常制御開始閾値X0に設定する。一方、脈動が検出されている場合には(S17:Yes)、その処理をステップS18に進める。
【0087】
ここで、ステップS16の脈動検出処理について説明する。図5は、ブレーキECU100がステップS16の脈動検出処理として実行する脈動検出ルーチンを表すフローチャートである。この脈動検出ルーチンは、車両が走行中であって、ブレーキ保持状態となる場合においてのみ実行される。
【0088】
ブレーキECU100は、脈動検出ルーチンを開始すると、まず、ステップS31において、車輪速センサ105により検出される車輪速Vxを読み込む。続いて、ステップS32において、制御圧センサ103により検出される検出液圧Pxを読み込みメモリに記憶する。続いて、ステップS33において、車輪速Vxに基づいて、車輪が1回転したか否かを判断し、車輪が1回転していない場合には脈動検出ルーチンを一旦抜けてメインルーチンのステップS17に移行する。脈動検出ルーチンは、閾値可変制御ルーチンに組み込まれているため、所定の短い周期で繰り返される。従って、車輪が1回転するまで、ステップS31〜S33の処理が繰り返される。これにより、検出液圧Pxがサンプリングされる。この車輪が1回転するまでの期間における脈動検出判定結果は、「脈動無し」に設定されている。
【0089】
ブレーキECU100は、こうした処理を繰り返し、車輪が1回転したことを検出すると(S33:Yes)、ステップS34において、車輪が1回転した期間における検出液圧Pxの変動量ΔPxを計算する。この変動量ΔPxは、サンプリングした検出液圧Pxの最大値Pxmaxと最小値Pxminとの差分で求められる。続いて、ブレーキECU100は、ステップS35において、車輪が1回転するあいだの変動量ΔPxが脈動判定基準値ΔPaより大きいか否かを判断し、変動量ΔPxが脈動判定基準値ΔPa以下である場合には(S35:No)には、ステップS36において、液圧が脈動していない(液圧の脈動無し)と判定する。一方、変動量ΔPxが脈動判定基準値ΔPaより大きい場合には(S35:Yes)には、ステップS37において、液圧が脈動している(液圧の脈動有り)と判定する。脈動判定基準値ΔPaは、リニア制御弁67が過度に作動する状態を判定する脈動の大きさを表す値に予め設定される。脈動判定基準値ΔPaは、例えば、通常制御開始閾値X0と同じ値など任意に設定することができる。
【0090】
ブレーキECU100は、脈動有りと判定した場合には、ステップS38において、検出液圧Pxの変動量ΔPxをメモリに記憶する。そして、ステップS39において、脈動の有無の判定結果をメモリに記憶して脈動検出ルーチンを一旦抜けて、所定の周期で上述した処理を繰り返す。車輪が1回転した後は、現時点から車輪の1回転分だけ遡った時点までの期間の検出液圧Pxに基づいて車輪1回転分の変動量ΔPxを計算し、この変動量ΔPxに基づいて液圧脈動の有無判定を行う。また、変動量ΔPxと脈動有無の判定結果とを記憶更新する。尚、ブレーキECU100は、ブレーキ保持状態が解除された場合には、脈動判定結果および変動量ΔPxをメモリに記憶保持した状態で、この脈動検出ルーチンを一旦停止する。そして、再度、ブレーキ保持状態が検出されると(S12,S15:Yes)、脈動検出ルーチンを再開する。この再開時においては、車輪の1回転が検出されるまでの期間の初期値として、メモリに記憶されている脈動判定結果および変動量ΔPxが使用される。
【0091】
ブレーキECU100は、ステップS17(図4)において、脈動有りと判定した場合には、続くステップS18において、リニア制御弁67の停車時作動判定結果を読み込む。リニア制御弁67の停車時作動判定結果は、車両が停車中でブレーキ保持状態となっているときにリニア制御弁67が実質的に作動していないか否かを表す履歴情報、つまり、第4条件を満たしているか否かを表す情報である。リニア制御弁67の停車時作動判定は、停車時リニア制御弁作動確認ルーチンにより行われる。
【0092】
図6は、ブレーキECU100が実行する停車時リニア制御弁作動確認ルーチンを表すフローチャートである。停車時リニア制御弁作動確認ルーチンは、閾値可変制御ルーチンとは独立して任意のタイミングで実施される。停車時リニア制御弁作動確認ルーチンが起動すると、ブレーキECU100は、まず、ステップS51において、車輪速センサ105により検出される車輪速Vxを読み込む。続いて、ステップS52において、車輪速Vxに基づいて、車両が停車中であるか否かを判断する。例えば、車輪速Vxがゼロであるか否かを判断する。車両が停車中でなければ(S52:No)、ステップS53において、後述する計時タイマの値Tをゼロクリアし、ステップS54において、後述する作動回数カウンタの値nをゼロクリアして、停車時リニア制御弁作動確認ルーチンを一旦終了する。
【0093】
ブレーキECU100は、停車時リニア制御弁作動確認ルーチンを所定の周期で繰り返し実行する。そして、車両が停車中であることを検出すると(S52:Yes)、ステップS55において、ストロークセンサ104により検出されるペダルストロークSpを読み込む。続いて、ステップS56において、ペダルストロークSpおよびペダルストロークSpの微分値(単位時間あたりの変化量)に基づいて、ブレーキペダル10が保持操作中であるか否かを判断する。このステップS56において、ブレーキECU100は、ペダルストロークSpが操作有無判定基準値より大きく、かつ、ペダルストロークSpの微分値Sp’の絶対値が保持判定基準値B以下である場合に、ブレーキペダル10が保持操作中であると判定する。この保持判定基準値Bは、ステップS12で用いた保持判定基準値Aよりも小さい、若しくは等しいことが望ましい。つまり、走行中におけるペダル保持操作の判定よりも、停車時リニア制御弁作動確認ルーチンにおけるペダル保持操作の判定レベルを厳しくする事が望ましい。ブレーキECU100は、ブレーキペダル10が保持操作中でなければ、その処理をステップS53に進める。
【0094】
尚、ブレーキペダル操作量に代えて、目標液圧P*を用いて、ブレーキ保持状態(目標液圧P*が一定)を検出するようにしてもよい。この場合、ブレーキECU100は、ステップS55において、ブレーキ制御で演算される目標液圧P*を読み込み、ステップS56において、目標液圧P*がブレーキ発生判定基準値よりも大きく、かつ、目標液圧P*の微分値(単位時間あたりの変化量)の絶対値が判定基準値以下である場合に、ブレーキ保持状態であると判定するようにすればよい。
【0095】
ブレーキECU100は、こうした処理を繰り返し、車両が停車中で、かつ、ブレーキ保持状態であることを検出すると(S56:Yes)、ステップS57において、計時タイマの値Tを値1だけインクリメントする。尚、タイマ値Tの初期値はゼロに設定されている。続いて、ステップS56において、リニア制御弁67が作動したか否かについて判断する。例えば、作動液の液漏れが生じている場合には、検出液圧Pxが低下するため、それに応じてリニア制御弁67に通電指令が出力されリニア制御弁67が作動する。従って、このステップS58においては、リニア制御弁67へ出力する通電指令の有無により判断することができる。あるいは、検出液圧Pxを変化の有無により判断するようにしてもよい。
【0096】
ブレーキECU100は、リニア制御弁67が作動した場合には、作動回数カウンタの値nを値「1」だけインクリメントする。尚、作動回数カウンタ値nの初期値はゼロに設定されている。続いて、ブレーキECU100は、ステップS60において、タイマ値Tがタイムアップ値Tupに到達したか否かを判断し、タイマ値Tがタイムアップ値Tupに到達していなければ、停車時リニア制御弁作動確認ルーチンを一旦終了する。
【0097】
ブレーキECU100は、こうした処理を繰り返す。タイマ値Tがタイムアップ値Tupに到達する前に、車両が走行し始めたり(S52:No)、ブレーキ保持状態が解除された場合(S56:No)には、計時タイマ値Tおよび作動回数カウンタ値nをゼロクリアする。停車中におけるブレーキ保持状態が設定時間継続すると、タイマ値Tがタイムアップ値Tupに到達する。このとき、作動回数カウンタ値nは、設定時間内におけるリニア制御弁67の作動回数を表すものとなる。
【0098】
ブレーキECU100は、タイマ値Tがタイムアップ値Tupに到達すると、ステップS61において、作動回数カウンタ値nが正常判定基準値n0を超えるか否かを判断し、作動回数カウンタ値nが正常判定基準値n0を超える場合には、ステップS62において、リニア制御弁67が作動したと判定し、作動回数カウンタ値nが正常判定基準値n0以下である場合に、ステップS63において、リニア制御弁67が作動していない(正常状態である)と判定する。そしてブレーキECU100は、ステップS64において、判定結果をメモリに記憶して停車時リニア制御弁作動確認ルーチンを一旦終了する。
【0099】
正常判定基準値n0は、作動液の液漏れや高粘度時における流れ不良が生じていない正常時においては、作動回数カウンタ値nが正常判定基準値n0以下になり、作動液の液漏れや高粘度時における流れ不良が生じている異常時においては、作動回数カウンタ値nが正常判定基準値n0を超えるような値に設定されている。従って、正常判定基準値n0は、作動液の液漏れや高粘度時における流れ不良が生じているか否かを判定する判定閾値である。
【0100】
リニア制御弁67が作動したと判定された場合(S62:Yes)は、作動液の液漏れや高粘度時における流れ不良が生じていると推定できる。リニア制御弁67が作動したと判定されている場合が、第4条件が満たされていない状態となり、リニア制御弁67が作動していないと判定されている場合が、第4条件が満たされている状態となる。
【0101】
図4の閾値可変制御ルーチンの説明に戻る。ブレーキECU100は、停車時リニア制御弁作動確認ルーチンによる判定結果を読み込み(S18)、ステップS19において、リニア制御弁67が作動していないか否かを判定し、リニア制御弁67が作動したと判定されている場合には(S19:No)、その処理をステップS13に進めて、制御開始閾値Xを通常制御開始閾値X0に設定する。一方、リニア制御弁67が作動していないと判定されている場合には(S19:Yes)、ステップS20において、制御開始閾値Xを増加させる。例えば、脈動検出ルーチン(図5)のステップS38において記憶した検出液圧Pxの変動量ΔPxだけ制御開始閾値Xを増加させる。つまり、通常制御開始閾値X0に変動量ΔPxを加算した値を制御開始閾値X(=X0+ΔPx)として設定する。あるいは、ステップS38において記憶した検出液圧Pxの変動量ΔPxを制御開始閾値Xに設定するようにしてもよい。尚、制御開始閾値Xは、通常制御開始閾値X0よりも大きくなる値であれば任意に設定することができる。
【0102】
ブレーキECU100は、ステップS13あるいはステップS20において、制御開始閾値Xを設定すると、閾値可変制御ルーチンを一旦終了する。そして、所定の演算周期が経過すると、再び閾値可変制御ルーチンを開始する。
【0103】
この閾値可変制御ルーチンによれば、第1条件から第4条件までの4つの条件が満たされていない間は、制御開始閾値Xが通常制御開始閾値X0に設定される。そして、4つの条件が満たされると(S19:Yes)、リニア制御弁67が過度に作動している状態であると判定されて、制御開始閾値Xが通常制御開始閾値X0よりも大きな値に設定される。
【0104】
こうした状態から、例えば、ブレーキペダル10の踏み増しあるいは踏み戻しが行われると、もしくは、目標液圧P*が増加あるいは減少すると(S12:No)、制御開始閾値Xは通常制御開始閾値X0に戻される(S13)。このとき、その直前における変動量ΔPxがメモリに記憶保持される(S38)。その後、ブレーキ保持状態となると、メモリに記憶しておいた変動量ΔPxに基づいて制御開始閾値Xが設定される。そして、変動量ΔPxが検出される都度、制御開始閾値Xが変動量ΔPxに応じた値に変更されていく。
【0105】
ブレーキペダル10の踏み増しあるいは踏み戻しが行われている間、あるいは、目標液圧P*が変化している間は、それによって検出液圧Pxが変動するため、適正に脈動の検出を行うことができない。また、ブレーキ保持状態に戻ったときに、制御開始閾値Xを通常制御開始閾値X0から開始すると、ブレーキ操作フィーリングが変化しやすい。そこで、ブレーキ操作変更(踏み増し、踏み戻し)、あるいは、目標液圧変更が行われる直前の制御開始閾値Xに関する情報(この例では変動量ΔPx)を記憶保持しておき、再度、ブレーキ保持状態が検出されたときに、記憶しておいた情報に基づいて制御開始閾値Xを設定する。
【0106】
図7は、制御開始閾値Xの変化を表す。時刻t1において、ブレーキ保持状態が検出されると、制御開始閾値Xが増加設定される。そして、時刻t2において、ブレーキペダル10の踏み増し、もしくは、目標液圧増加が検出されると、制御開始閾値Xが元の通常制御開始閾値X0に戻される。
【0107】
ところで、制御開始閾値Xを増加させると、図8に示すように、通常制御開始閾値X0を使用した電流制御を行う場合に比べて、目標液圧P*に対して検出液圧Pxの応答が遅れる。図中において、太線aは目標液圧P*の推移を表し、実線bは通常制御開始閾値X0を使用した検出液圧Pxの推移を表し、実線cは増加させた制御開始閾値Xを使用した検出液圧Pxの推移を表す。この場合、目標液圧P*が設定されてから検出液圧Pxが目標液圧P*に到達するまでの時間が、フェールセーフ閾値(破線d)よりも長くなると、自己診断機能(ダイアグノーシス)によりエラー判定しウォーニングランプが点灯してしまう。そこで、制御開始閾値Xを通常制御開始閾値X0よりも大きく設定している場合には、フェールセーフ閾値(許容遅れ時間)を通常値よりも長くするように変更する処理を加えるようにするとよい。
【0108】
以上説明した本実施形態のブレーキ制御装置によれば、第1条件から第4条件に基づいて、リニア制御弁67が過度に作動する状態であるか否かを判断し、過度に作動する状態であると判定した場合にのみ、制御開始閾値Xを通常制御開始閾値X0よりも増加させる。従って、リニア制御弁67が過度に作動していないときに無駄に制御開始閾値Xを増加させてブレーキ操作フィーリングを低下させてしまうことを抑制できる。また、リニア制御弁67が過度に作動している場合には、制御開始閾値Xを増加させるため、リニア制御弁67の耐久性を向上させることができる。
【0109】
また、液圧脈動の振幅が大きいほど制御開始閾値Xを大きく設定するため、適切な制御開始閾値Xを設定することができ、リニア制御弁67の過度の作動を確実に抑制することができる。
【0110】
また、ブレーキユニット40の不均衡な構造に起因しない脈動(例えば、液漏れ、高粘度による流れ不良等に起因した脈動)が発生する状況においては、第4条件を使って制御開始閾値Xを増加させないようにしているため、制動の低下や制動のかかり過ぎが発生することを抑制することができる。
【0111】
また、制御開始閾値Xを増加させている状態では、フェールセーフ閾値を大きくするため、誤診断やウォーニングランプによる誤報知を防止することができる。
【0112】
ここで、上記実施形態の変形例について説明する。上記実施形態においては、リニア制御弁67が過度に作動する状態であるか否かについて、4つの条件を設定して判断しているが、更に、第5条件を設定するようにしてもよい。
【0113】
この第5条件は、アキュムレータ圧センサ101により検出されるアキュムレータ圧Paccが変動していることである。アキュムレータ圧Paccが変動していれば、実際にリニア制御弁67が作動して作動液が流れたと推定することができる。リニア制御弁67の耐久寿命は、実際に弁体が開閉することにより変化していく。そこで、アキュムレータ圧Paccの変動を検出することでリニア制御弁67が実際に作動したか否かを判断する。
【0114】
この第5条件の判断は、図4の閾値可変制御ルーチンに組み込めばよい。例えば、図9に示すように、ステップS17とステップS18との間に、ステップS21とステップS22の処理を組み込む。ブレーキECU100は、ステップS21において、アキュムレータ圧センサ101により検出されるアキュムレータ圧Paccを読み込む。続いて、ステップS22において、アキュムレータ圧Paccの変化量ΔPaccを検出し、変化量ΔPaccが弁作動判定基準値ΔPacc0より大きいか否かを判断する。変化量ΔPaccが弁作動判定基準値ΔPacc0より大きい場合には、アキュムレータ圧Paccの変動ありと判定して、その処理をステップS18に進める。一方、変化量ΔPaccが弁作動判定基準値ΔPacc0以下であれば、アキュムレータ圧Paccの変動なしと判定して、その処理をステップS13に進める。アキュムレータ圧Paccの変化量ΔPaccの検出は、例えば、予め設定した所定期間内におけるアキュムレータ圧Paccの推移に基づいて、その最大値と最小値との偏差を検出するようにすればよい。
【0115】
この変形例によれば、リニア制御弁67が過度に作動する状態を一層精度良く判定することができる。
【0116】
次に、脈動検出および制御開始閾値の設定処理にかかる第2実施形態について説明する。以下、上述した実施形態を第1実施形態と呼ぶ。
【0117】
例えば、図10(a)に示すように、液圧の脈動幅が制御開始閾値Xよりも小さい場合には、リニア制御弁67の過度な作動は起きない。一方、同図(b)に示すように、液圧の脈動幅が制御開始閾値Xより大きい場合には、リニア制御弁67の過度な作動は起きる。従って、同図(b)のような状態において、液圧の脈動を検出する必要がある。この場合、目標液圧P*と検出液圧Pxとの偏差を計算し、この偏差に基づいてブレーキユニット40から発生する液圧脈動を検出することができる。
【0118】
しかし、次のような課題が残る。ブレーキECU100は、目標液圧勾配がある閾値範囲内に収まるため、微小な目標液圧勾配となるペダル操作を検出することができない。そのため、図11に示すように、検出液圧Pxが一定であっても、微小勾配のペダル操作による目標液圧P*の変動が発生すると、誤って液圧脈動であると判定してしまう。
【0119】
また、作動液の液漏れが生じる場合には、図12に示すように、検出液圧Pxは、低下した後、リニア制御弁67により調圧されて目標液圧P*に近づく。従って、液圧調整により検出液圧Pxが繰り返し変動するため、この場合においても誤って液圧脈動であると判定してしまう。
【0120】
そこで、第2実施形態においては、ブレーキユニット40から発生する液圧脈動(ブレーキユニット40の不均衡な構造に起因する液圧脈動)が周期性を有すること、および、その周期が車輪の1回転あたりにN周期(N≧1)となること着目して、液圧脈動の誤検出を防止する。
【0121】
液圧脈動の周期検出にあたっては、図13に示すように、検出液圧Pxが予め設定した脈動検出閾値P1をクロスするタイミングを検出し、そのクロスするタイミングの周期、この図においては、時刻t1から時刻t2までの時間(t2−t1)、あるいは、時刻t1’から時刻t2’までの時間(t2’−t1’)を求め、この時間を液圧脈動の周期と推定する。そして、液圧脈動の周期が車輪の1回転の周期より大きければ、ブレーキユニット40から発生する液圧脈動ではないと判定する。図14は、車速と車輪の1回転の周期との関係を表す。図中において、塗りつぶした領域Aが、ブレーキユニット40から発生した液圧脈動と判断できる領域となる。この周期判定により、上述した誤った脈動検出を防止することができる。
【0122】
この場合、確実に脈動の周期を捉えることができるようにするためには、脈動検出閾値P1を制御開始閾値Xの1/2以下に設定すればよい。しかし、第2実施形態においても、液圧脈動が検出された場合に制御開始閾値Xを増加させるため、脈動検出閾値P1を、増加した制御開始閾値Xの1/2に設定すると、液圧脈動の中心が目標液圧と重なった場合に、脈動の周期を捉えられない場合がある。
【0123】
例えば、図15(a)に示すように、通常制御開始閾値X0を超える振幅の液圧脈動が、その脈動の中心が目標液圧P*から偏心して発生しており、制御開始閾値Xが図の一点鎖線にて示す位置にまで増加設定されている状態を考える。この状態から液圧脈動の中心が目標液圧P*と揃った場合、図15(b)に示すように、通常制御開始閾値X0の1/2に設定した脈動検出閾値P1であれば、検出液圧Pxが脈動検出閾値P1をクロスするが、増加設定された制御開始閾値Xの1/2に設定した脈動検出閾値P1’の場合には、検出液圧Pxが脈動検出閾値P1’をクロスしなくなり、脈動周期を検出することができなくなる。
【0124】
そこで、この第2実施形態においては、増加設定していない通常制御開始閾値X0の1/2以下の値を脈動検出閾値P1として設定する。これにより、液圧脈動の中心と目標液圧との関係に関わらず、確実に液圧脈動の周期を検出することができる。
【0125】
以下、第2実施形態におけるブレーキECU100の処理について説明する。図16は、第1実施形態における脈動検出ルーチン(図5)に代えて、ブレーキECU100が実行する第2実施形態としての脈動検出ルーチンを表す。この脈動検出ルーチンには、制御開始閾値を設定する処理も含まれている。この脈動検出ルーチンは、第1実施形態と同様に、車両が走行中であって、ブレーキ保持状態である場合においてのみ実行される。
【0126】
脈動検出ルーチンが開始されると、ブレーキECU100は、ステップS101において、制御圧センサ103により検出される検出液圧Pxを読み込み、次式により、現在の目標液圧P*と検出液圧Pxとの偏差の絶対値ΔP(以下、液圧偏差ΔPと呼ぶ)を計算する。
ΔP=|P*−Px|
【0127】
続いて、ブレーキECU100は、ステップS102において、液圧偏差ΔPが現在の制御開始閾値Xより大きいか否かを判断する。制御開始閾値Xの初期値、つまり、脈動検出ルーチンが起動した直後の制御開始閾値Xは、通常制御開始閾値X0に設定されている。従って、脈動検出ルーチンの起動時においては、液圧偏差ΔPと通常制御開始閾値X0とが比較されることになる。ブレーキECU100は、液圧偏差ΔPが制御開始閾値X以下であると判断した場合には、脈動検出ルーチンを一旦終了して、その処理をメインルーチン(図4)のステップS17に進める。この場合、脈動検出判定結果は、その直前までにメモリに記憶されている判定結果が使用される。脈動検出ルーチンの起動時においては、その初期値である「脈動無し」が判定結果として使用される。
【0128】
ブレーキECU100は、ステップS102において、液圧偏差ΔPが現在の制御開始閾値Xより大きいと判定した場合には、続くステップS103において、後述する脈動周期検出ルーチンにより検出された脈動周期を読み込む。続いて、ステップS104において、車輪速センサ105により検出される車輪速Vxを読み込む。
【0129】
続いて、ブレーキECU100は、ステップS105において、車輪速Vxに基づいて車輪の回転周期(車輪が1回転するのに要した時間)を計算し、脈動周期が車輪の回転周期以下であるか否かを判断する。車輪速センサ105は、各車輪ごとの車輪速Vxを検出するが、ここでは、任意の車輪の車輪速Vxを読み込んでもよいし、4輪の車輪速Vxを読み込んで、その平均値を車輪速Vxとして求めるなど任意の方法で車輪速Vxを検出することができる。脈動周期が車輪の回転周期よりも大きければ、ステップS106において、検出された液圧変動がリニア制御弁67を過度に作動させる脈動ではないと判定する。つまり、ブレーキユニット40から発生する液圧脈動ではないと判定する。続いて、ブレーキECU100は、ステップS110において、脈動判定結果をメモリに記憶して、脈動検出ルーチンを一旦終了する。
【0130】
一方、ステップS105において、脈動周期が車輪の回転周期以下であると判断した場合には、ブレーキECU100は、ステップS107において、液圧の脈動が発生している(脈動有り)と判定する。続いて、ブレーキECU100は、ステップS108において、制御開始閾値Xを予め設定した規定値ΔXだけ増加させる。つまり、現在の制御開始閾値Xに規定値ΔXを加算した値を、新たな制御開始閾値Xに設定する(X=X+ΔX)。続いて、ブレーキECU100は、ステップS109において、増加させた制御開始閾値Xをメモリに記憶し、ステップS110において、脈動判定結果をメモリに記憶して、脈動検出ルーチンを一旦終了する。
【0131】
ブレーキECU100は、所定の短い周期で脈動検出ルーチンを繰り返し実行する。制御開始閾値Xが増加設定された後においては、ステップS102における、液圧偏差ΔPの大きさを判定する判定基準値(=制御開始閾値X)も大きくなる。従って、液圧偏差ΔPが制御開始閾値X以下になるまで、制御開始閾値Xが規定値ΔXずつ増加することになる。そして、ブレーキECU100は、液圧偏差ΔPが制御開始閾値X以下になると(S102:No)、ステップS103からの処理をスキップして脈動検出ルーチンを一旦終了する。この場合、ステップS109において記憶した最新の制御開始閾値Xと、ステップS110において記憶した最新の脈動判定結果とが脈動検出ルーチンの結果として出力される。
【0132】
最新の脈動判定結果は、閾値可変制御ルーチン(図4)におけるステップS17の判定に使用される。従って、リニア制御弁67を過度に作動させる脈動が検出されていない場合(S106)には、制御開始閾値Xに通常制御開始閾値X0が設定される(S13)。また、ステップS109においてメモリに記憶した最新の制御開始閾値Xは、閾値可変制御ルーチン(図4)のステップS20において設定される制御開始閾値Xとして使用される。従って、脈動が検出されている場合(S107)であって、第4条件が満足されている場合には、制御開始閾値Xとして、メモリに記憶されている最新の制御開始閾値Xが使用される。
【0133】
尚、液圧偏差ΔPが制御開始閾値Xより大きい状態であることは、リニア制御弁67の目標電流値が設定値(開弁に必要な電流値)を超えていることと同等であるため、液圧偏差ΔPが制御開始閾値Xより大きい状態であることを確認する処理(ステップS101,102)に代えて、リニア制御弁67の目標電流値が設定値を超えていることを確認する処理を行うようにしてもよい。
【0134】
次に、脈動周期検出ルーチンについて説明する。図17は、ブレーキECU100が実行する脈動周期検出ルーチンを表すフローチャートである。脈動周期検出ルーチンは、上記の脈動検出ルーチンが実行されているときに、それと並行して所定の短い周期で繰り返し実行される。
【0135】
ブレーキECU100は、ステップS121において、タイマフラグFが「0」に設定されているか否かを判断する。このタイマフラグFは、後述する計時タイマが計時を行っているか否かを表すもので、脈動周期検出ルーチンの起動時においては「0」に設定されている。ブレーキECU100は、ステップS121において「Yes」と判定すると、続いて、ステップS122において、直前まで検出されていた液圧偏差ΔP(n-1)が脈動検出閾値P1よりも小さく、かつ、今回検出した液圧偏差ΔP(n)が脈動検出閾値P1を超えているか否かを判断する。この液圧偏差ΔPは、上述した脈動検出ルーチンのステップS101で計算した結果を使用することができる。また、今回検出した液圧偏差ΔP(n)とは、今回の1回の検出値により求めた値でもよいが、直近の複数回の検出値の平均値を使うようにすることが好ましい。また、直前まで検出されていた液圧偏差ΔP(n-1)についても同様に、直前回の1回の検出値により求めた値でもよいが、今回分として計算に利用した検出値より前の複数回の検出値の平均値を使うようにすることが好ましい。
【0136】
このステップS122の判断は、図13において時刻t1にて示すように、液圧偏差ΔPが脈動検出閾値P1をクロスする(小から大へクロスする)タイミングであるか否かを判断する処理である。脈動検出閾値P1は、上述したように通常制御開始閾値X0の1/2以下に設定される。この実施形態においては、脈動検出閾値P1は通常制御開始閾値X0の1/2に設定される。ブレーキECU100は、ステップS122の判断が「No」となる場合は、脈動周期検出ルーチンを一旦終了する。ブレーキECU100は、こうした処理を所定の周期で繰り返す。
【0137】
ブレーキECU100は、液圧偏差ΔPが脈動検出閾値P1をクロスしたタイミングを検出すると(S122:Yes)、続くステップS123において、タイマフラグFを「1」に設定する。続いて、ステップS124において、計時タイマの値Tを値1だけインクリメントする。つまり計時を開始する。このタイマ値Tの初期値はゼロに設定されている。
【0138】
続いて、ブレーキECU100は、ステップS125において、直前まで検出されていた液圧偏差ΔP(n-1)が脈動検出閾値P1よりも小さく、かつ、今回検出した液圧偏差ΔP(n)が脈動検出閾値P1を超えているか否かを判断する。このステップS125は、液圧偏差ΔPが脈動検出閾値P1をクロスする(小から大へクロスする)次のタイミングを検出するための判断処理である。例えば、図13における時刻t2となるタイミングを検出するための判断処理である。この場合、ステップS124からステップS125に移行するときに、所定時間だけ待って液圧偏差ΔPの読み込み値を更新しておくことにより、重複したタイミングで「Yes」と判定しないようにするとよい。
【0139】
ブレーキECU100は、ステップS125の判断が「No」となる場合は、脈動周期検出ルーチンを一旦終了する。ブレーキECU100は、所定のインターバルが経過すると、再度、脈動周期検出ルーチンを開始するが、この場合には、タイマフラグFが「1」に設定されているため、ステップS122〜S123の処理をスキップする。従って、ブレーキECU100は、計時タイマ値Tをインクリメントしつつ(S124)、ステップS125の判断を所定の周期で繰り返す。
【0140】
ブレーキECU100は、こうした処理を繰り返し、液圧偏差ΔPが脈動検出閾値P1をクロス(小から大)したことを検出すると(S125:Yes)、ステップS126において、計時タイマ値Tに相当する時間を脈動周期として設定する。続いて、ステップS127において計時タイマ値Tをゼロクリアし、ステップS128においてタイマフラグFを「0」にリセットして脈動周期検出ルーチンを一旦終了する。
【0141】
尚、本実施形態においては、液圧偏差ΔPが脈動検出閾値P1より小さい状態から大きくなる状態に移行するタイミングを捉えているが、液圧偏差ΔPが脈動検出閾値P1より大きい状態から小さくなる状態に移行するタイミング(図13における時刻t1’、時刻t2’)を捉えてもよい。
【0142】
以上説明した第2実施形態においては、リニア制御弁67の過度の作動を確実に防止するために、目標液圧P*と検出液圧Pxとの偏差の絶対値である液圧偏差ΔPと制御開始閾値Xとの大小関係を常に監視し、液圧偏差ΔPが制御開始閾値Xを超えたときに、その脈動周期が、ブレーキユニット40から発生する液圧脈動である可能性がある場合には、制御開始閾値Xを規定値ΔXだけ増加させる。従って、図18に示すように、液圧偏差ΔPが制御開始閾値X以下になるまで、制御開始閾値Xが規定値ΔXずつ増加することになる。このため、制御開始閾値Xを過不足無く適正値に設定することができる。従って、リニア制御弁67の過度の作動を防止するとともに、ブレーキ操作フィーリングの低下を最小限に抑えることができる。
【0143】
また、脈動周期に基づいてブレーキユニット40から発生する液圧脈動ではないと判断できる液圧脈動に対しては、不必要に制御開始閾値Xを増加させないため、これによっても、ブレーキ操作フィーリングの低下を抑制することができる。
【0144】
また、脈動検出閾値P1を通常制御開始閾値X0の1/2の値に設定するため、液圧脈動の周期を確実に検出することができる。
【0145】
また、液圧脈動の検出にあたっては、検出液圧Pxのデータを車輪の1回転周期分サンプリングして記憶する必要がないことから、ブレーキECU100のマイコンのメモリ容量が少なくてすむため、低コストにて実施可能となる。
【0146】
次に、閾値増大制御をリセットする処理について説明する。上述した図4の閾値可変制御ルーチンは、リニア制御弁67が過度に作動する状態であると判定して閾値増大制御(S20)を開始させる処理である。従って、閾値増大制御が開始された後に、ブレーキ保持状態が解除された場合、つまり、ブレーキペダル10の踏み増しあるいは踏み戻しが行われた場合、もしくは、目標液圧が変化した場合であっても、制御開始閾値Xを表す情報、および、脈動が検出されたという情報が記憶保持される。そして、再び、ブレーキ保持状態となると、その制御開始閾値Xを引き継いで閾値増大制御が継続される。このリセット処理においては、閾値可変制御ルーチンにおける制御状態を初期状態に戻す処理である。
【0147】
4輪を1つの液圧系統で制御しているシステムにおいては、例えば、左右輪から発生していた脈動が逆位相となった場合には、系統内で脈動が打ち消しあう。このため、制御圧センサ103において検出される液圧変動は小さくなる。このような液圧変動の状況が変わる場合においては、閾値可変制御ルーチンにおける制御状態を初期状態に戻すことが好ましい。
【0148】
図19は、ブレーキECU100の実行する閾値可変制御リセットルーチンを表すフローチャートである。この閾値可変制御リセットルーチンは、上述した第1実施形態および第2実施形態に適用することができる。閾値可変制御リセットルーチンは、閾値可変制御ルーチンと並行して所定の短い周期で繰り返し実施される。
【0149】
ブレーキECU100は、ステップS201において、車両の旋回により内輪差あるいは外輪差が発生する状況であるか否かを判断する。例えば、操舵角センサ106により検出される操舵角θを読み込み、その操舵角θの絶対値|θ|が予め設定された設定舵角θ1より大きいか否かを判断することで、内輪差あるいは外輪差が発生する状況であるか否かを推定することができる。また、操舵角θに代えて、車両の横加速度を検出する横加速度センサや、車両のヨーレートを検出するヨーレートセンサの検出信号を読み込み、検出した横加速度が設定加速度より大きい場合、あるいは、検出したヨーレートが設定ヨーレートより大きい場合に、内輪差あるいは外輪差が発生する状況であると推定するようにしてもよい。
【0150】
車両が旋回していない場合、つまり、内輪差あるいは外輪差が発生する状況でない場合は、左右輪から発生していた脈動は、逆位相に変わることはなく、そのまま継続されると考えられる。従って、閾値可変制御ルーチンにおける制御状態を初期状態に戻す必要はないため、ブレーキECU100は、閾値可変制御リセットルーチンを一旦終了する。この場合、閾値可変制御ルーチンにおける制御状態は継続される。
【0151】
ブレーキECU100は、内輪差あるいは外輪差が発生する状況であると判定した場合には、続くステップS202において、車速が設定車速より小さいか否かを判断する。この場合、車輪速センサ105により検出される車輪速Vxから求められる車速を使用して判断すればよい。車速が小さい場合には大きい場合に比べて、液圧脈動が発生しにくい状況となる。従って、車速が設定車速より大きい場合には、閾値可変制御ルーチンにおける制御状態を初期状態に戻す必要はないため、ブレーキECU100は、閾値可変制御リセットルーチンを一旦終了する。
【0152】
ブレーキECU100は、車速が設定車速より小さいと判定した場合には、続くステップS203において、制動オフ状態であるか否かを判断する。例えば、ストロークセンサ104により検出されるペダルストロークSpやレギュレータ圧センサ102により検出されるレギュレータ圧Pregに基づいて、ブレーキペダル10が開放されているか否か判断する。制動オフ状態時においては、例えば、ハンドル操作が行われるなど車両状態が変化する可能性が高い。従って、制動オフ状態ではない場合には、閾値可変制御ルーチンにおける制御状態を初期状態に戻す必要はないため、ブレーキECU100は、閾値可変制御リセットルーチンを一旦終了する。
【0153】
ブレーキECU100は、制動オフ状態であると判定した場合には、ステップS204において、閾値可変制御ルーチンにおける制御状態を初期状態に戻す。従って、ブレーキECU100のマイコンのメモリに記憶されている脈動判定結果が、その初期値である「脈動無し」に戻され、制御開始閾値Xが通常制御開始閾値Xに戻される。
【0154】
この閾値可変制御リセットルーチンによれば、適切なタイミングで閾値可変制御をリセットすることができる。従って、無駄にブレーキ操作フィーリングを変えてしまうことが抑制される。
【0155】
尚、この例では、3つの条件(S201,S202,S203)が全て満たされたときに閾値可変制御をリセットするようにしているが、何れか一つの条件が成立したとき、つまり、ステップS201,S202,S203のOR条件を使って閾値可変制御をリセットするようにしてもよい。また、リセットする条件は、必ずしも、この3つを全て使用する必要はなく、そのうちの1つ、あるいは、2つを使用するようにしてもよい。
【0156】
ところで、閾値可変制御により制御開始閾値Xを増大させていった場合、制御開始閾値Xが大きくなりすぎると、目標液圧P*と検出液圧Pxとの乖離が大きくなってから、リニア制御弁67の通電制御が開始されることになる。このため、状況によっては、車両姿勢が急に変化する可能性がある。そこで、こうした課題が懸念される場合には、以下のようにするとよい。
【0157】
図20は、ブレーキECU100が実行する電流勾配制限設定ルーチンを表す。電流勾配制限設定ルーチンは、所定の短い周期で繰り返し実行される。電流勾配制限設定ルーチンが起動すると、ブレーキECU100は、ステップS301において、現在の制御開始閾値Xが基準値Xrefよりも大きいか否かを判断する。この基準値Xrefは、電流勾配制限を行う必要があるか否かを判定する閾値である。制御開始閾値Xが基準値Xref以下である場合(S301:No)には、電流勾配制限を行う必要がないため、ステップS302において、電流勾配通常モードを選択し、制御開始閾値Xが基準値Xrefよりも大きい場合(S301:Yes)には、ステップS303において、電流勾配制限モードを設定する。この基準値Xrefは、通常制御開始閾値X0以上の任意の値に設定することができる。
【0158】
電流勾配制限モードが設定されると、ブレーキECU100は、リニア制御弁67に流す電流の勾配(単位時間当たりの変化量)を、電流勾配通常モードのそれに比べて制限する。電流勾配の制限は、例えば、フィルタの特性を変更したり、目標電流i*の変化量を制限する上限値を変更することにより実施できる。例えば、電流勾配制限モードにおいては、1演算周期の間に目標電流i*を変化させることが許容される上限値である勾配上限値Δi*=(|i(n)*−i(n-1)*|)を、電流勾配通常モードにおける勾配上限値Δi*よりも小さく設定すればよい。尚、電流勾配の制限は、増加方向の勾配のみを制限するものであってもよい。
【0159】
この勾配制限は、例えば、リニア制御弁67の通電開始からの経過時間が増えるほど緩くするようにするとよい。あるいは、目標液圧P*と検出液圧Pxとの偏差ΔP(=|P*−Px|)が小さいほど勾配制限を緩くするようにしてもよい。また、ブレーキペダル操作量の微分値(例えば、ペダルストロークSpの微分値)の絶対値、あるいは、目標液圧P*の微分値の絶対値が小さいほど勾配制限を厳しくするようにしてもよい。
【0160】
図21は、電流勾配通常モードにおけるリニア制御弁67の電流波形(破線)と、電流勾配制限モードにおけるリニア制御弁67の電流波形(実線)との比較例を表す。この図から分かるように、電流勾配制限モードにおいては、電流勾配制限によりリニア制御弁67に流れる電流の急増が抑制されるため、車両姿勢が急変することを防止することができる。
【0161】
以上、本実施形態のブレーキ制御装置について説明したが、本発明は上記実施形態および変形例に限定されるものではなく、本発明の目的を逸脱しない限りにおいて種々の変更が可能である。
【0162】
例えば、本実施形態のブレーキ制御装置は、増圧リニア制御弁67Aと減圧リニア制御弁67Bとからなるリニア制御弁にて4輪のホイールシリンダ42の液圧を共通に制御するブレーキ制御装置に適用しているが、各車輪ごとに別々のリニア制御弁を設けて各輪のホイールシリンダの液圧をリニア制御弁で独立して調圧するブレーキ制御装置に適用してもよい。
【符号の説明】
【0163】
10…ブレーキペダル、20…マスタシリンダユニット、30…動力液圧発生装置、42FR,42FL,42RR,42RL…ホイールシリンダ、50…液圧制御弁装置、67A…増圧リニア制御弁、67B…減圧リニア制御弁、100…ブレーキECU、101…アキュムレータ圧センサ、102…レギュレータ圧センサ、103…制御圧センサ、104…ストロークセンサ、105…車輪速センサ、106…操舵角センサ。
【特許請求の範囲】
【請求項1】
作動液の液圧を受けて車輪に制動力を与えるホイールシリンダと、
ブレーキ操作量を検出するブレーキ操作量検出手段と、
前記ホイールシリンダに伝達される液圧を調整するリニア制御弁と、
前記ホイールシリンダに伝達される液圧を検出する液圧検出手段と、
前記液圧検出手段により検出された液圧である検出液圧と目標液圧との偏差の絶対値が制御開始閾値を超えたとき、前記検出液圧が前記目標液圧に近づくように前記リニア制御弁の駆動制御を開始する液圧制御手段と
を備えた車両のブレーキ制御装置において、
前記ホイールシリンダの液圧が脈動していることを検出する脈動検出手段と、
車両が停車中であって前記ブレーキ操作量あるいは前記目標液圧が一定に維持されるブレーキ保持状態となるときに前記リニア制御弁の作動量が正常範囲内であるということを条件として、車両が走行中であって前記ブレーキ保持状態となるときに前記液圧検出手段により液圧の脈動が検出されている場合に、前記制御開始閾値を、前記液圧の脈動が検出されていない場合における制御開始閾値を表す通常制御開始閾値よりも大きくする閾値変更手段と
を備えたことを特徴とする車両のブレーキ制御装置。
【請求項2】
前記脈動検出手段は、前記目標液圧と前記検出液圧との偏差の絶対値が前記制御開始閾値を超え、且つ、前記目標液圧と前記検出液圧との偏差の周期が車輪の1回転の周期以下である場合に、前記液圧が脈動していると判定することを特徴とする請求項1記載の車両のブレーキ制御装置。
【請求項3】
前記閾値変更手段は、前記目標液圧と前記検出液圧との偏差の絶対値が前記制御開始閾値以下になるまで、前記制御開始閾値を大きくすることを特徴とする請求項1または2記載の車両のブレーキ制御装置。
【請求項4】
前記脈動検出手段は、前記目標液圧と前記検出液圧との偏差の絶対値が基準値を下回っている状態から上回る状態に変化する周期、あるいは、基準値を上回っている状態から下回る状態に変化する周期が、車輪の1回転の周期以下である場合に、前記目標液圧と前記検出液圧との偏差の周期が車輪の1回転の周期以下であると判定することを特徴とする請求項2または3記載の車両のブレーキ制御装置。
【請求項5】
前記基準値は、前記通常制御開始閾値の半分以下に設定されることを特徴とする請求項4記載の車両のブレーキ制御装置。
【請求項6】
車両が停車中であって前記ブレーキ保持状態となるときに、設定時間内における前記リニア制御弁の作動回数を検出し、前記検出した作動回数が基準回数以下である場合に、前記リニア制御弁の作動量が正常範囲内であると判定する正常判定手段を備えたことを特徴とする請求項1ないし請求項5の何れか一項記載の車両のブレーキ制御装置。
【請求項7】
前記制御開始閾値が前記通常制御開始閾値よりも大きく設定されている場合には、前記リニア制御弁の制御量の変化勾配を小さくする勾配制限手段を備えたことを特徴とする請求項1ないし請求項6の何れか一項記載の車両のブレーキ制御装置。
【請求項8】
車両が旋回したこと、車速が基準速度以下に低下したこと、ブレーキペダル操作が解除されたことの少なくとも1つが検出されたとき、前記閾値変更手段により変更された制御開始閾値を通常制御開始閾値に戻すリセット手段を備えたことを特徴とする請求項1ないし請求項7の何れか一項記載の車両のブレーキ制御装置。
【請求項1】
作動液の液圧を受けて車輪に制動力を与えるホイールシリンダと、
ブレーキ操作量を検出するブレーキ操作量検出手段と、
前記ホイールシリンダに伝達される液圧を調整するリニア制御弁と、
前記ホイールシリンダに伝達される液圧を検出する液圧検出手段と、
前記液圧検出手段により検出された液圧である検出液圧と目標液圧との偏差の絶対値が制御開始閾値を超えたとき、前記検出液圧が前記目標液圧に近づくように前記リニア制御弁の駆動制御を開始する液圧制御手段と
を備えた車両のブレーキ制御装置において、
前記ホイールシリンダの液圧が脈動していることを検出する脈動検出手段と、
車両が停車中であって前記ブレーキ操作量あるいは前記目標液圧が一定に維持されるブレーキ保持状態となるときに前記リニア制御弁の作動量が正常範囲内であるということを条件として、車両が走行中であって前記ブレーキ保持状態となるときに前記液圧検出手段により液圧の脈動が検出されている場合に、前記制御開始閾値を、前記液圧の脈動が検出されていない場合における制御開始閾値を表す通常制御開始閾値よりも大きくする閾値変更手段と
を備えたことを特徴とする車両のブレーキ制御装置。
【請求項2】
前記脈動検出手段は、前記目標液圧と前記検出液圧との偏差の絶対値が前記制御開始閾値を超え、且つ、前記目標液圧と前記検出液圧との偏差の周期が車輪の1回転の周期以下である場合に、前記液圧が脈動していると判定することを特徴とする請求項1記載の車両のブレーキ制御装置。
【請求項3】
前記閾値変更手段は、前記目標液圧と前記検出液圧との偏差の絶対値が前記制御開始閾値以下になるまで、前記制御開始閾値を大きくすることを特徴とする請求項1または2記載の車両のブレーキ制御装置。
【請求項4】
前記脈動検出手段は、前記目標液圧と前記検出液圧との偏差の絶対値が基準値を下回っている状態から上回る状態に変化する周期、あるいは、基準値を上回っている状態から下回る状態に変化する周期が、車輪の1回転の周期以下である場合に、前記目標液圧と前記検出液圧との偏差の周期が車輪の1回転の周期以下であると判定することを特徴とする請求項2または3記載の車両のブレーキ制御装置。
【請求項5】
前記基準値は、前記通常制御開始閾値の半分以下に設定されることを特徴とする請求項4記載の車両のブレーキ制御装置。
【請求項6】
車両が停車中であって前記ブレーキ保持状態となるときに、設定時間内における前記リニア制御弁の作動回数を検出し、前記検出した作動回数が基準回数以下である場合に、前記リニア制御弁の作動量が正常範囲内であると判定する正常判定手段を備えたことを特徴とする請求項1ないし請求項5の何れか一項記載の車両のブレーキ制御装置。
【請求項7】
前記制御開始閾値が前記通常制御開始閾値よりも大きく設定されている場合には、前記リニア制御弁の制御量の変化勾配を小さくする勾配制限手段を備えたことを特徴とする請求項1ないし請求項6の何れか一項記載の車両のブレーキ制御装置。
【請求項8】
車両が旋回したこと、車速が基準速度以下に低下したこと、ブレーキペダル操作が解除されたことの少なくとも1つが検出されたとき、前記閾値変更手段により変更された制御開始閾値を通常制御開始閾値に戻すリセット手段を備えたことを特徴とする請求項1ないし請求項7の何れか一項記載の車両のブレーキ制御装置。
【図1】


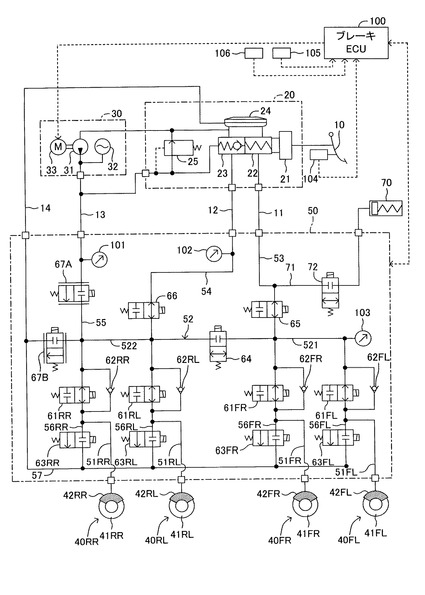
【図2】
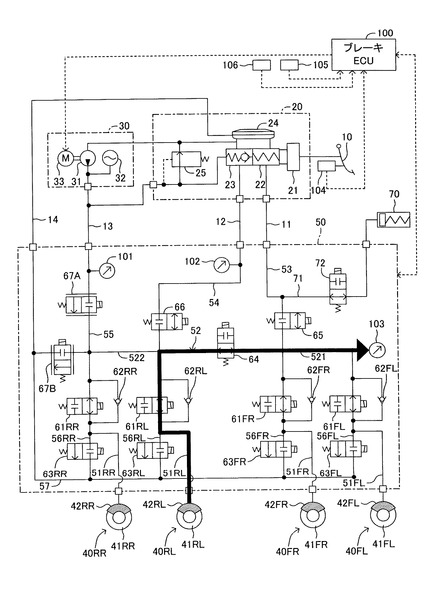
【図3】
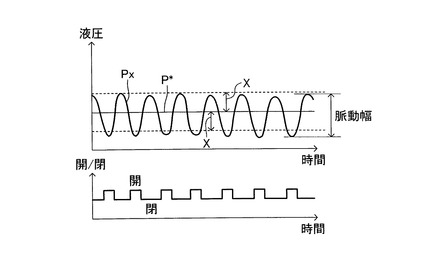
【図4】
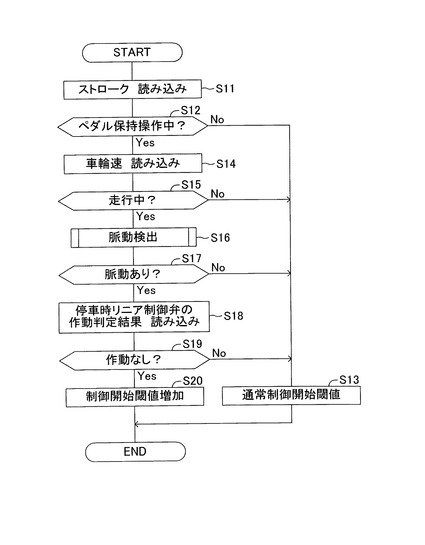
【図5】
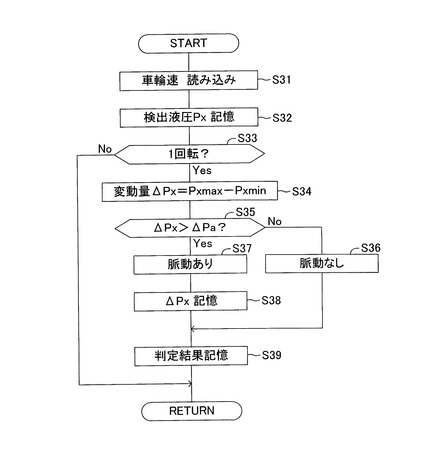
【図6】
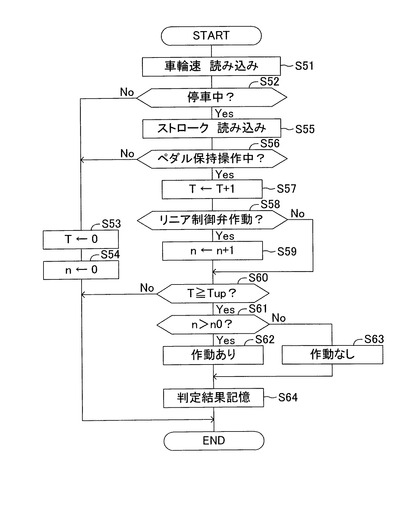
【図7】
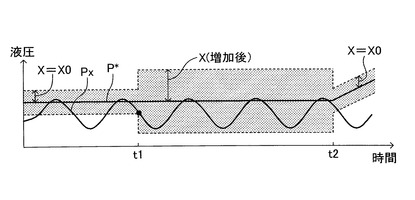
【図8】
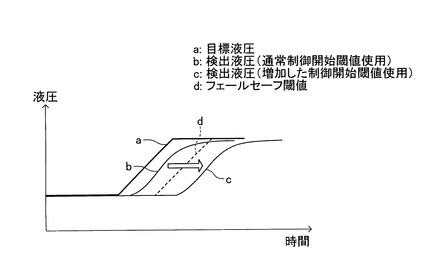
【図9】
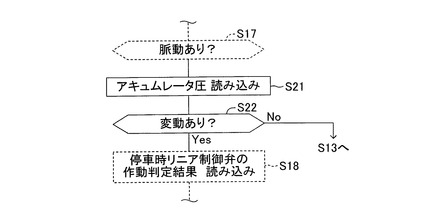
【図10】
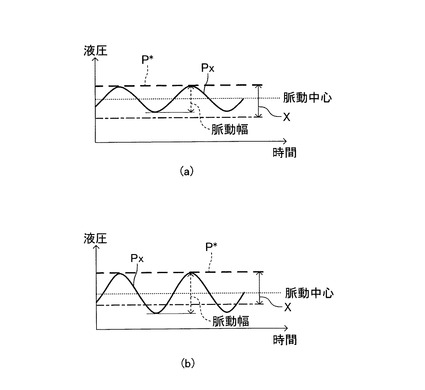
【図11】
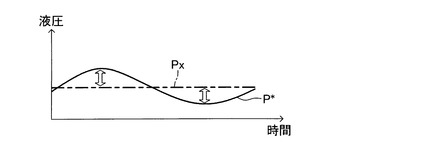
【図12】
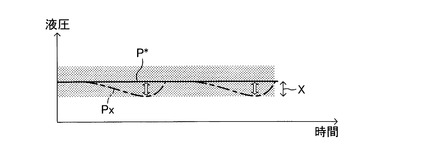
【図13】
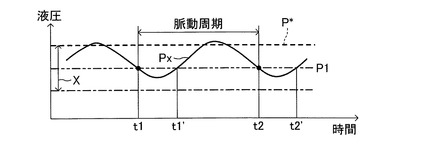
【図14】

【図15】
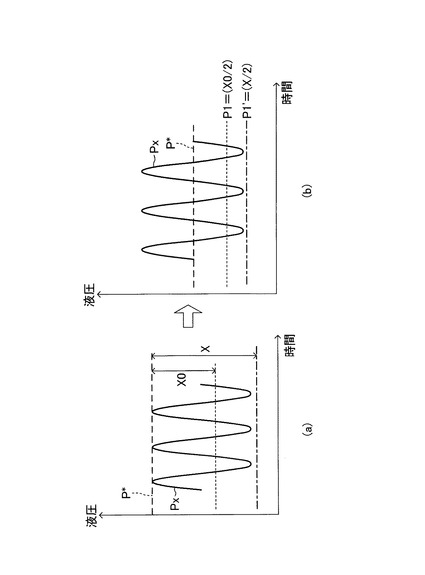
【図16】
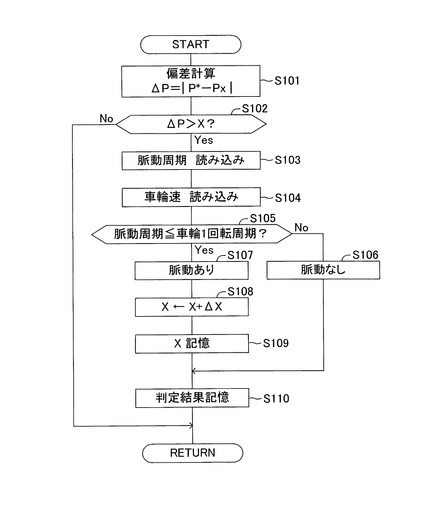
【図17】
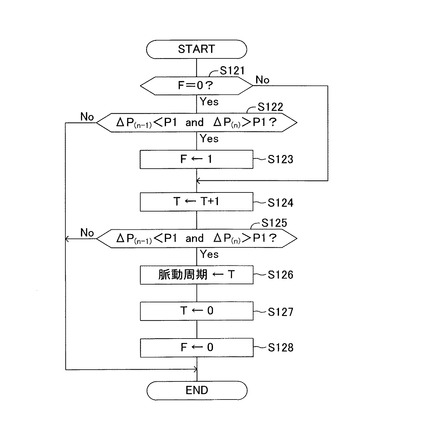
【図18】
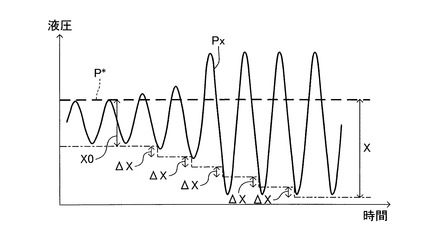
【図19】
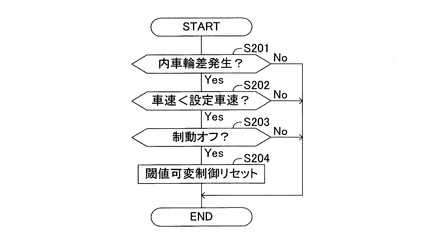
【図20】
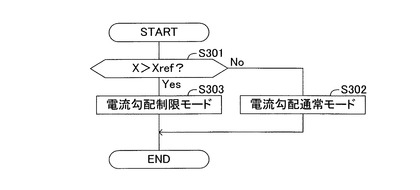
【図21】
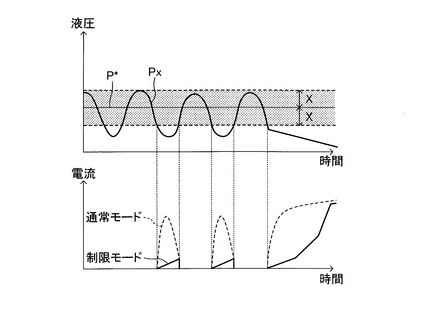
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2013−49292(P2013−49292A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−186668(P2011−186668)
【出願日】平成23年8月30日(2011.8.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月30日(2011.8.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]