
車両のヨーモーメント発生旋回効率化装置
【課題】急な旋回の必要時に車両の旋回ヨーモーメントを効率的に発生させることができて、緊急操舵時の確実な転舵が行えるヨーモーメント発生旋回効率化装置を提供する。
【解決手段】左右の車輪1L,1Rを独立して制動力制御または駆動力制御可能なブレーキ4L,4Rおよび駆動系6のいずれか一方と、前記左右の車輪1L,1Rを独立して転舵可能な転舵装置3とを備えた車両20に適用される。操舵手段18の指令に従って転舵装置3を駆動するときに、左右の車輪1L,1Rの転舵動作に時間差を生じさせると共に、左右の車輪1L,1Rの制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う制御手段9を設ける。
【解決手段】左右の車輪1L,1Rを独立して制動力制御または駆動力制御可能なブレーキ4L,4Rおよび駆動系6のいずれか一方と、前記左右の車輪1L,1Rを独立して転舵可能な転舵装置3とを備えた車両20に適用される。操舵手段18の指令に従って転舵装置3を駆動するときに、左右の車輪1L,1Rの転舵動作に時間差を生じさせると共に、左右の車輪1L,1Rの制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う制御手段9を設ける。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、障害物回避に代表される緊急操舵時に、左右独立制御可能な制動力源または駆動力源を用いて旋回内外の車輪に制動力差または駆動力差を発生させ、制動・駆動力差による車両の旋回モーメントを効率的に発生させる車両のヨーモーメント発生旋回効率化装置に関する。
【背景技術】
【0002】
従来の制動力を用いた旋回アシストとしては、特許文献1に記載のものが知られている。これは、制動力による旋回のアシストにより、車両のヨーイングの位相遅れを改善するフィードフォワード制御である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許3788131号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
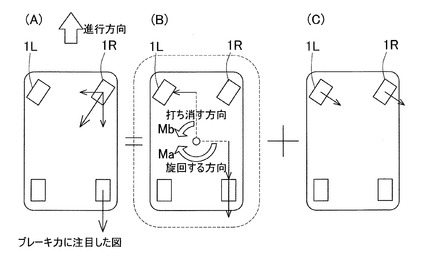
しかし、図5(A)に示すように、転舵状態で旋回内側の車輪の制動力が大きくなるように左右の車輪1L,1Rに制動力差を発生させた場合、制動力は車両内側を向くため、車両の旋回方向と逆方向のモーメントMa,Mbが同時に発生し、打ち消しあう(図5(B))。このため、旋回ヨーモーメントを効率的に発生させることができず、旋回アシストの効果が今一つ十分に得られない。
【0005】
この発明の目的は、急な旋回の必要時に車両の旋回ヨーモーメントを効率的に発生させることができて、緊急操舵時の確実な転舵が行える車両のヨーモーメント発生旋回効率化装置を提供することである。
【課題を解決するための手段】
【0006】
この発明の車両20のヨーモーメント発生旋回効率化装置は、互いに同じ前後方向位置にある左右の車輪1L,1Rを独立して制動力制御または駆動力制御可能なブレーキ4L,4Rおよび駆動系6のいずれか一方と、前記左右の車輪1L,1Rを独立して転舵可能な転舵装置3とを備えた車両20において、
操舵手段18の操舵指令に従って前記転舵装置3を駆動するときに、左右の車輪1L,1Rの転舵動作に時間差を生じさせると共に、左右の車輪1L,1Rの制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う旋回アシスト制御手段9を設けたことを特徴とする。上記操舵手段18は、例えばステアリングホイールである。前記「制動・駆動力差」は、制動力差または駆動力差を意味し、制動力差と駆動力差の両方を生じさせるようにしても良い。
【0007】
この構成によると、旋回アシスト制御として、左右の車輪1L,1Rの制動・駆動力差を生じさせると共に、左右の車輪1L,1Rの転舵動作に時間差を生じさせる。この時間差は、片方の車輪1L,1Rの転舵の開始を遅らせるようにしても、また低速に転舵させるようにしても良い。この転舵動作に時間差により、旋回ヨーモーメントを発生させる車両20への力の向きは車両後ろ方向に向くことになり、車両20の旋回ヨーモーメントを効率的に発生させることができる。そのため、緊急操舵時の確実な転舵が行える。
なお、この旋回アシスト制御は、転舵角度を大きくする場合に限らず、転舵角度が中立角度に戻るように操舵する場合にも適用できる。
【0008】
この発明において、前記車両20が、前記左右の車輪1L,1Rを独立して制動力制御可能なブレーキ4L,4Rを備える場合に、前記旋回アシスト制御手段9は、転舵角度を大きくする場合の前記旋回アシスト制御として、旋回内側の車輪1L,1Rの転舵を遅れさせ、旋回内側の車輪1L,1Rが制動力大となるように左右の車輪1L,1Rの制動力差を生じさせるものとしても良い。
転舵角度を大きくする場合、旋回内側の車輪の転舵1L,1Rを遅れさせ、旋回内側の車輪1L,1Rが制動力大となるように左右の車輪1L,1Rの制動力差を生じさせることで、旋回ヨーモーメントを発生させる車両20への力の向きは車両後ろ方向に向くことになり、車両の旋回ヨーモーメントを効率的に発生させることができる。そのため、緊急操舵時の確実な転舵が行える。
【0009】
この発明において、前記旋回アシスト制御手段9は、前記操舵手段18の操舵指令から、設定規則Rに従って操舵の緊急度を判断する判断部11を有し、この判断部11により緊急度が高いと判断された場合のみ、前記旋回アシスト制御を行うようにしても良い。
急ハンドルのような緊急時を除き、通常の操舵時は、制動・駆動力差や、左右の車輪1L,1Rの転舵動作の時間差等の旋回アシストを行わなくても、操舵に応じた適切な転舵が可能である。また、操舵の違和感を生じさせないためにも、旋回アシストを行わない方が好ましい。このため、上記判断部11によって、操舵手段18の操舵指令から、緊急度、つまり運転者の障害物回避の意図を求め、緊急度が高いと判断された場合のみ、前記旋回アシスト制御を行うことで、操舵違和感を回避しながら、必要な場合に、旋回アシスト制御による旋回ヨーモーメントの効率的発生を行わせることができる。
【0010】
この発明において、前記判断部11による緊急度の判断は、前記操舵手段18の操舵角速度および操舵角加速度の値によって行うようにしても良い。一般的に、運転者の障害物回避の意図が強い場合は、操舵角速度の絶対値が大きくなる。また、操舵角加速度により、操舵の意図があるのか、保舵に移行したいかが判断できる。したがって、判断部11による緊急度の判断を、操舵手段18の操舵角速度および操舵角加速度の値によって行うことで、運転者の意図に応じた緊急度の判断が適切に行える。
【0011】
この発明において、前記判断部11は、前記操舵手段18の操舵指令による緊急度の判断に加え、車両20に設けられて車両20の衝突判断のための周囲環境を検出する周囲環境取得センサ14の検出内容に応じて緊急度を判断する機能を有するものとしても良い。周囲環境取得センサ14としては、前方を撮像するカメラ15や、障害物との間の距離を検出する距離センサ16、超音波センサ等の等がある。
このような周囲環境取得センサ14の検出内容を用いることで、障害物回避に必要な緊急度を判断することができる。操舵手段18の操舵指令による緊急度の判断に加え、周囲環境取得センサ14の検出内容を用いて判断することで、より適切な緊急度の判断が行える。
【0012】
この発明において、前記旋回アシスト制御手段9が、前記操舵手段18の操舵指令から、設定規則Rに従って操舵の緊急度を判断する判断部11を有する場合に、この判断部11で判断された緊急度が高いほど、前記左右の車輪1L,1Rの制動・駆動力差を生じさせる程度を定めるアシスト量を大きくするようにし、またはアシスト量の上限値を大きくするようにしても良い。
上記の左右車輪1L,1Rの転舵動作に時間差や、左右車輪1L,1Rの制動・駆動力差による旋回アシスト制御は、緊急時の転舵動作の確実化に貢献するが、過度の旋回アシスト制御は、旋回ヨーモーメントの必要以上の発生、必要以上の横加速度の発生、操舵の違和感、車輪の1L,1Rスリップに繋がる。そのため、左右車輪1L,1Rの制動・駆動力差を定めるアシスト量またはアシスト量の上限値を、緊急度と、周囲環境取得センサ14などより得られる各種情報に応じて調整することで、適切な旋回ヨーモーメント,横加速度を得ることができ、操舵の違和感低減、車輪のスリップ回避が行える。
【0013】
この発明において、前記判断部11は、定められた旋回アシスト終了条件を判断し、旋回アシスト終了条件を充足すると判断したときに、前記旋回アシスト制御手段9による旋回アシスト制御を終了させるようにしても良い。
旋回アシスト中は、アシスト量に応じて制動・駆動力が制御されるが、その間に条件変化が生じて旋回アシストが不要になることがある。このような条件変化を、前記判断部11で旋回アシスト終了条件と比較し、条件を充足すると、通常の操舵に移行させる。これにより、過度の旋回アシスト制御を回避して適切な旋回ヨーモーメント,横加速度を得ることができ、操舵の違和感低減、車輪のスリップ回避が行える。
【発明の効果】
【0014】
この発明の車両のヨーモーメント発生旋回効率化装置は、互いに同じ前後方向位置にある左右の車輪を独立して制動力制御または駆動力制御可能なブレーキおよび駆動系のいずれか一方と、前記左右の車輪を独立して転舵可能な転舵装置とを備えた車両において、
操舵手段の操舵指令に従って前記転舵装置を駆動するときに、左右の車輪の転舵動作に時間差を生じさせると共に、左右の車輪の制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う旋回アシスト制御手段を設けたため、急な旋回の必要時に車両の旋回ヨーモーメントを効率的に発生させることができて、緊急操舵時の確実な転舵が行える。
【図面の簡単な説明】
【0015】
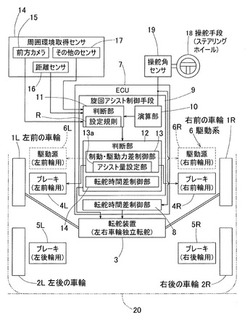
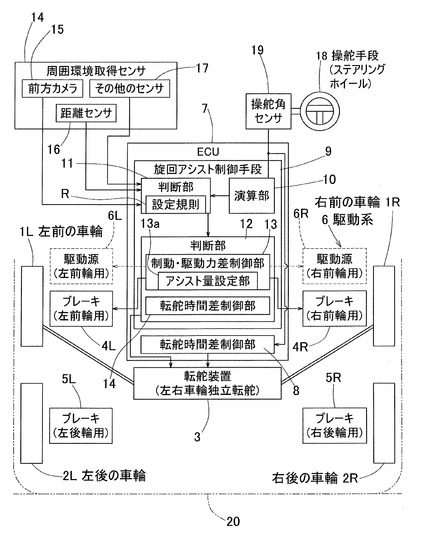
【図1】この発明の一実施形態に係る車両のヨーモーメント発生旋回効率化装置の概念構成を示すブロック図である。
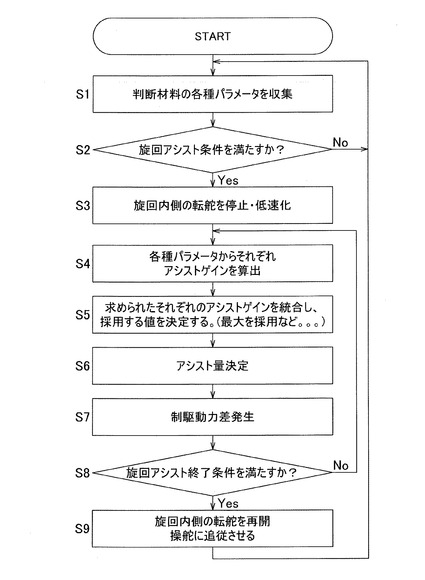
【図2】同ヨーモーメント発生旋回効率化装置による制御の流れ図である。
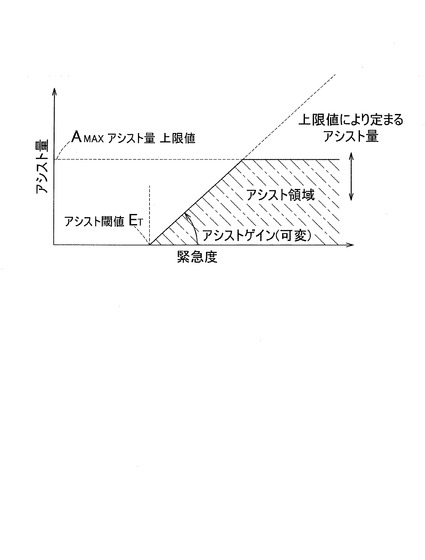
【図3】アシスト量、アシスト量の上限値、アシストゲイン、および緊急度の関係を示す説明図である。
【図4】同ヨーモーメント発生旋回効率化装置による旋回アシスト動作の説明図である。
【図5】従来の旋回アシスト動作の説明図である。
【発明を実施するための形態】
【0016】
この発明の一実施形態を図1〜図4と共に説明する。図1において、同実施形態が適用される車両20は、前輪となる車輪1L,1Rが転舵輪となる4輪の自動車、例えば乗用車であり、転舵輪となる左右の車輪1L,1Rを独立して転舵可能な転舵装置3を備える。走行駆動は、前輪となる車輪1L,1Rと、後輪となる車輪2L,2Rのいずれを駆動する形式であっても、4輪駆動であっても良く、またその駆動源は、エンジン等の内燃機関、電動モータのいずれであっても、両者のハイブリッド形式であっても良い。ただし、転舵輪となる左右の車輪1L,1Rを独立して制動力制御可能なブレーキ4L,4Rを、各車輪1L,1Rに対して設けてある。非転舵輪となる車輪2L,2Rのブレーキ5L,5Rは、左右輪の独立した制御が不可能なものであっても、可能なものであっても良い。各ブレーキ4L,4R,5L,5Rは、油圧式ブレーキであっても、その他の方式、例えば電動式やワイヤ式であっても良い。
【0017】
なお、転舵輪となる左右の車輪1L,1Rは、必ずしも独立して制動力制御可能ではなくても良いが、その場合は、左右の車輪1L,1Rを独立して駆動力制御可能な駆動系6が設けられたものとする。この駆動系6は、例えばインホイールモータ等の左右個別の駆動源6L,6Rである。なお、図1は、左右の車輪1L,1Rを独立して制動力制御可能とした例であり、左右輪を独立して駆動する駆動源6L,6Rを有しない例を示した図であるが、説明の便宜上、破線で駆動源6L,6Rのブロックを示すことで、駆動源6L,6Rを備える例を併記している。
【0018】
次に、制御系を説明する。ECU7は、車両20の全般の制御を行う電気制御ユニットであり、コンピュータや、これに実行されるプログラム、並びに電子回路により構成される。このECU7に、転舵に係る制御手段として、旋回基本動作制御手段8と、旋回アシスト制御手段9とが設けられている。
【0019】
旋回基本動作制御手段8は、操舵手段18の操舵指令に従って転舵装置3を制御する手段であり、上記操舵指令により、左右の車輪1L,1Rを同じ角度だけ転舵させる。操舵手段18は、例えばステアリングホイールであり、これによる操舵指令は、操舵手段18の回転角度である操舵角を検出する操舵角センサ19の出力である。
【0020】
旋回アシスト制御手段7は、操舵手段18の操舵指令に従って転舵装置3を駆動するときに、左右の車輪1L,1Rの転舵動作に時間差を生じさせると共に、左右の車輪1L,1Rの制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる制御である旋回アシスト制御を行う手段である。この旋回アシスト制御として生じさせる前記「制動・駆動力差」は、左右の車輪1L,1Rを個別に駆動する駆動系6を有しない場合は、制動力差であるが、左右個別に制御可能な駆動系6(駆動源6L,6R)を有する場合は駆動力差であっても良く、また左右個別に制御可能な駆動系6と左右個別に制御可能なブレーキ4L,4Rの両方を有する場合は、制動力差と駆動力差のいずれであっても、また両方であっても良い。旋回アシスト制御手段9は、演算部10と、判断部11と、制御部12とを備え、制御部12は制動・駆動力差制御部13と転舵時間差制御部14とで構成される。
【0021】
演算部10は、操舵角センサ19の出力する操舵角より、操舵角速度、および操舵角加速度を演算する手段である。演算部10は、必ずしも旋回アシスト制御手段9の一部として設けられていなくても良く、例えば操舵角センサ19の機能として設けられてもいても良い。つまり操舵角センサ19が操舵角速度および操舵角加速度を出力するものであっても良い。また、判断部11が演算部10の機能を有していても良い。
【0022】
判断部11は、操舵手段18の操舵指令から、設定規則Rに従って操舵の緊急度を判断する手段であり、制御部12は、この判断部11により緊急度が高いと判断された場合のみ旋回アシスト制御を行う。前記設定規則Rは、例えば、演算部10によって演算された操舵手段18の操舵角速度および操舵角加速度の値と、操舵の緊急度との関係を定めた規則である。前記設定規則Rは、より具体的には、例えば、運転者の状況に応じた操舵パターンであり、この操舵パターンと照らし合わせ判断を行う。運転者の状況に応じた操舵パターンは、車速、操舵角、操舵角速度、操舵角加速度の関係のパターン等である。上記操舵パターンは、試験やシミュレーション等に基づいて任意に設定すれば良く、また初期値を設定しておいて、実際の運転の繰り返しに応じて学習して更新を行うようにしても良い。
【0023】
判断部11は、操舵手段18の操舵指令による緊急度の判断に加え、周囲環境取得センサ14の検出内容に応じて緊急度を判断する機能を有するものとしても良い。周囲環境取得センサ14は、車両20に設けられて車両20の衝突判断のための周囲環境を検出するセンサ類の総称であり、例えば、前方カメラ15、距離センサ16、その他のセンサ17等である。その他のセンサ17は、例えば車速センサである。前方カメラ15は、車両20の前方を撮像するカメラであり、撮影した画像をディジタル信号で出力するCCDカメラ等である。前方カメラ15の出力は、判断部11の一部として、または判断部11とは別に設けられた画像処理手段(図示せず)で処理した結果が前記緊急度の判断に用いられる。距離センサ16は、車両20と障害物との間の距離を検出するセンサであり、超音波センサ等が用いられる。
【0024】
判断部11は、緊急度の判断の他に、緊急度が高いと判断された場合のみ旋回アシスト制御を行わせる指令を制御部12に対して行うが、この機能に加え、緊急度が高いほど、左右の車輪1L,1Rの制動・駆動力差を定めるアシスト量を大きくする指令、アシスト量と緊急度との割合を示すアシストゲインを大きくする指令、およびアシスト量の上限値を大きくする指令のうちのいずれか1つ、または任意の2つ、または全てを、制御部12の制動・駆動力差制御部13に対して与える機能を有するものとしてもよい。
【0025】
アシスト量、アシスト量の上限値、アシストゲイン、および緊急度は、例えば図3に示す関係にある。
(アシスト量)=〔(緊急度)−(アシスト閾値)〕×(アシストゲイン)
である。
ただし、0≦(アシスト量)≦(アシスト量上限値)
とする。
同図に示すように、アシスト量は、緊急度が高くなるに従い、アシストゲインを示す曲線に従って大きくなるが、緊急度が高くなってもアシスト量上限値より大きくはならず、アシスト量上限値で一定の値となる。
なお、アシスト閾値ET は、アシストを行う場合の最低の緊急度である。アシストゲインは、可変であり、車速などのいくつかのパラメータにより変化する。アシスト量上限値AMAX も、アシスト閾値ET と同じく可変であり、車速などのいくつかのパラメータにより変化する。アシスト閾値ET およびアシスト量上限値AMAX が各パラメータによってどのように変化するかは、旋回アシスト制御手段9において、適宜定めておく。
図3において、緊急度を示す横軸と、アシストゲインを示す線と、アシスト量上限値を示す横線とで囲まれた領域が、アシストを行う領域であるアシスト領域である。
【0026】
なお、判断部11は、緊急度の判断のみを行い、アシスト量を大きくする処理、アシストゲインを大きくする処理、およびアシスト量の上限値を大きくする処理は、制御部12が判断部11から与えられた緊急度に応じて行うようにしてもよい。
【0027】
また、判断部11は、定められた旋回アシスト終了条件を判断し、この旋回アシスト終了条件を充足すると判断したときに、旋回アシスト制御手段9の制御部12による旋回アシスト制御を終了させる指令を出力する。旋回アシスト制御を終了についても、判断部11は旋回アシスト終了条件の判断のみを行い、その判断結果に応じて、を制御部12が旋回アシスト制御を終了させるようにしても良い。
【0028】
前記制御部12の制動・駆動力差制御部13は、アシスト量設定部13aに設定されたアシスト量に応じて制動・駆動力差が生じるように、左右のブレーキ4L,4Rの制動力の制御、また左右の駆動源6L,6Rの駆動力の制御を行う手段である。アシスト量設定部13aは、アシスト量を自由に更新可能である。
【0029】
前記制御部12の転舵時間差制御部14は、左右の車輪1L,1Rの転舵動作に時間差を生じさせる手段である。この時間差は、いずれか片方の車輪1L,1Rの転舵の開始を遅らせるようにしても、また同時に転舵を開始させて低速に転舵させるようにしても、さらに転舵の開始の遅れと転舵の速度差との両方を生じさせるようにしても良い。
【0030】
次に、上記構成による作用および動作の流れを説明する。旋回アシスト制御手段9の各部のより具体的な機能は、以下の作用の説明と共に説明する。
作用の概要を説明すると、図5と共に前述したように、単に、転舵状態で制動・駆動力差を発生させた場合、制駆動力は車両内側を向くため、車両20の旋回方向と逆方向のモーメントが同時に発生し打ち消しあう。
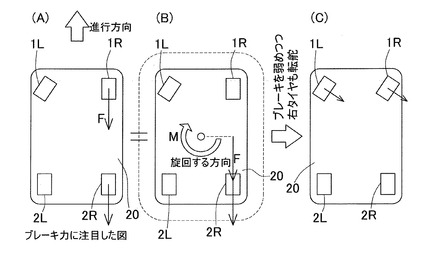
そこで、この実施形態では、左右独立の転舵装置3を用い、図4のように旋回外側の車輪1Lは旋回方向に転舵させ、制動力を発生させる旋回内側の車輪1Rは即座には転舵させないか、または低速に転舵させる。これにより、同図(B)のように、旋回ヨーモーメントを発生させる。制動による車両20への力Fの向きは車両後ろ方向を向くため、車両の旋回ヨーモーメントMを効率的に発生させることができる。
【0031】
動作の流れの詳細を説明する。図2は、旋回アシスト制御手段9が行う制御の一例の流れ図であり、同図を参照して説明する。
ステップS1として、旋回アシストを行うか否かの判断材料の各種のパラメータを収集する。すなわち、判断部11により、操舵角センサ19の出力、および周囲環境取得センサ14の出力を監視し、緊急度(運転者の回避の意図)を求める。求められた緊急度が、定められた旋回アシスト条件を満たすか否かを判断する(S2)。この判断に基づき、条件を満たさない場合はパラメータ収集のステップ(S1)に戻る。なお、上記の各種のパラメータは、例えば、操舵角センサ19の出力から得られる操舵角、操舵角速度、操舵角加速度や、周囲環境取得センサ14から得られる各種の情報である。
【0032】
条件を満たす場合は、後述のように旋回内側の車輪1R(図4)の操舵を停止、または低速化し(S3)、かつ、判断部11または制動・駆動力差制御部13は、旋回ヨーモーメントを発生させる制動・駆動力のゲイン(アシストゲイン)、もしくはこれの上限値を決定し(S4,S5)、その値を用いて制動・駆動力差を定めるアシスト量を決定する(S6)。例えば、上記の収集された各種パラメータから、それぞれの定められた項目毎のアシストゲインを算出し(S4)、求められたそれぞれのアシストゲインとアシスト量を統合し、採用するアシストゲインの値を決定する。例えば、採用するアシストゲインの値は、最大のアシストゲインとする(S5)。項目毎のアシストゲインは、例えば上記パラメータ毎のアシストゲインである。緊急度と採用されたアシストゲインからアシスト量を決定する。この値がアシスト量上限値よりも大きければ、値は制限される(S6)。
【0033】
これらの過程(S1〜S6)で、判断部11は、演算部10から得られる操舵情報を用いて判断を下す場合、設定規則Rに応じて、例えば運転者の状況に応じた操舵パターンと照らし合わせ判断を行う。緊急度が高く、運転者の回避の意図が強い場合は、操舵角速度の絶対値が大きくなる。具体例を挙げると、判断部11は、この操舵角速度の絶対値に閾値を定め、αとする。また、操舵角加速度より、操舵の意図があるか、保舵に移行したいかが判断できる。以上から具体的な判断を行うと、操舵角が正の場合(操舵角:反時計回りを正)、(操舵角速度)>α、かつ(操舵角加速度)>0の時は緊急性の高い切り増し状態であり、(操舵角速度)<−α、かつ(操舵角加速度)<0の時は緊急性の高い切り戻し状態と判断し、旋回アシスト制御を行う条件とする。なお、操舵角が負の場合はαが負の値となり、大小符号も逆となる。また、それぞれの絶対値が大きいほど、制動・駆動力差制御部13のアシスト量設定部13aに設定するアシスト量を大きくする。
【0034】
また、判断部11は、前方カメラ15や距離センサ16、超音波センサ等の周囲環境取得センサ14を用いて回避の緊急度を判断する場合、障害物との距離、車両横方向に必要な回避量を求めることで、緊急度の判断を行う。障害物までの距離が短く必要な回避量が大きい場合緊急度が高く、緊急度が一定以上であることを、旋回アシスト制御を行う条件とする。また緊急度が高いほど、アシストゲインを大きくする。
【0035】
アシストゲインを設定するについては、緊急度以外の条件も参照する。車速が低い場合の運転者は、制動・駆動力の変化に敏感であるため、アシストゲインを小さくする必要がある。また、ABS(アンチロックブレーキ)動作や各種センサ17の情報から路面摩擦係数が小さいと判断される場合は、強い制駆動力の発生がスリップの原因になると考えられるため、アシストゲインを小さくする。これと同様に、必要以上の旋回ヨーモーメント、横加速度の発生時にも、違和感低減とスリップ回避のためにアシストゲインを小さくする。
なお、上記のアシストゲインの計算は、転舵中や旋回アシスト制御中も常に行い、求められたアシストゲインを用いてアシスト量を計算し、アシスト量設定部13aのアシスト量の設定値を常に更新する。
【0036】
制御部12の制動・駆動力差制御部13は、上記のように計算されてアシスト量設定部13aに設定されているアシスト量に応じ、ブレーキ4L,4R、または駆動源6L,6Rの制動・駆動力の制御を行う(S7)。
ブレーキ4L,4Rを用いる場合は、アシスト量に応じて左右の制動力に差を生じさせ(片側が0も含む)、旋回内側の車輪(図4では右側の車輪1R)の制動力を、外側の車輪(1L)の制動力に比べて大きくする。
【0037】
インホイールモータ搭載車に代表される左右駆動力の独立制御可能な駆動系6(駆動源6L,6R)を持つ場合は、ブレーキ4L,4Rの使用に加え、旋回内側の車輪1Rに負の駆動力を発生させる。以上により、路面から左右の車輪1L,Rに外力が生じ、制動力・駆動力差外力が車両20にヨーモーメントを発生させることができ、これを旋回アシストとする。
【0038】
以上の動作と同時に、制動・駆動力差による旋回ヨーモーメントをより効率的に発生させるために、左右独立の転舵機構3を用いて旋回内側の車輪1Rの転舵を停止もしくは低速にして、制駆動力発生による路面からの外力と車両20の進行方向とのなす角を小さくする(S3)。これにより、転舵状態で制動・駆動力差を発生させた際に生じる、旋回ヨーモーメントを打ち消す方向の力を抑えることができる。
【0039】
旋回内側の車輪1Rの転舵を停止もしくは低速にすることにより旋回ヨーモーメントの効率的な発生を実現するが、このまま旋回する場合には、旋回内側の車輪1Rが抵抗となり、旋回を妨げてしまう。そこで、転舵時間差制御部14は、上記ように旋回ヨーモーメントを発生させ、旋回を開始した後に、旋回内側の車輪1Rの転舵角を操舵に追従させる(S9)。
【0040】
旋回アシスト中も、刻々と変化するアシスト量に応じて制動・駆動力を制御するが、判断部11は旋回アシスト中も旋回アシスト条件を常に判断し(S8)、旋回アシスト終了条件を充足した場合、例えば旋回アシスト条件より外れた場合、旋回アシスト制御を終了し通常の操舵に移行し、ステップS1に戻る。通常の操舵は、旋回基本動作制御手段8による操舵である。この旋回アシスト制御を終了させる旋回アシスト終了条件は、旋回アシストを開始させる条件と異なる条件であっても良く、また同じ条件であっても良い。
【0041】
操舵角が、先に示した旋回アシストの条件を満たす時間は、運転条件・運転者によって異なるが、実測値で200ms程度であり、車両20への操舵角入力から旋回ヨーモーメントの発生までの時間である、約200msにほぼ一致する。そのため、操舵情報を条件とした場合、旋回アシスト終了の条件も操舵情報を参考とする。
【0042】
これ以外の、判断部11の判断する旋回アシスト終了の条件として、前記その他のセンサ17の一つである搭載した加速度・角速度センサの情報を用いた旋回ヨーモーメント・横加速度の検出が挙げられる。車両20に発生した旋回ヨーモーメント・横加速度を、アシストゲイン算出や旋回アシスト終了の条件のパラメータとして用いる。何れの場合においても、車両20の運動特性に効果が左右されるため、一定の遅延時間を設定するなどして調整するのが良い。また、ハンチング(判断材料となるパラメータがオン・オフ条件の境目に存在し、オン・オフを繰り返すこと)を防止するために、一定のフィルタ・遅延時間を設定することが好ましい。
【0043】
この実施形態の車両20のヨーモーメント発生旋回効率化装置によると、このようにして、急な旋回の必要時に車両20の旋回ヨーモーメントを効率的に発生させることができ、緊急操舵時の確実な転舵を行うことができる。
【0044】
なお、上記実施形態は、前輪転舵形式の場合につき説明したが、後輪転舵形式の車両の場合にも、この発明を適用することができる。
【符号の説明】
【0045】
1L,1R…車輪
3…転舵装置
4L,4R…ブレーキ
6…駆動系
6L,6R…駆動源
8…旋回基本動作制御手段
9…旋回アシスト制御手段
10…演算部段
11…判断部
12…制御部
13…制動・駆動力差制御部
14…周囲環境取得センサ
15…カメラ
16…距離センサ
17…その他のセンサ
18…操舵手段
19…操舵角センサ
20…車両
M…ヨーモーメント
R…設定規則
【技術分野】
【0001】
この発明は、障害物回避に代表される緊急操舵時に、左右独立制御可能な制動力源または駆動力源を用いて旋回内外の車輪に制動力差または駆動力差を発生させ、制動・駆動力差による車両の旋回モーメントを効率的に発生させる車両のヨーモーメント発生旋回効率化装置に関する。
【背景技術】
【0002】
従来の制動力を用いた旋回アシストとしては、特許文献1に記載のものが知られている。これは、制動力による旋回のアシストにより、車両のヨーイングの位相遅れを改善するフィードフォワード制御である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許3788131号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、図5(A)に示すように、転舵状態で旋回内側の車輪の制動力が大きくなるように左右の車輪1L,1Rに制動力差を発生させた場合、制動力は車両内側を向くため、車両の旋回方向と逆方向のモーメントMa,Mbが同時に発生し、打ち消しあう(図5(B))。このため、旋回ヨーモーメントを効率的に発生させることができず、旋回アシストの効果が今一つ十分に得られない。
【0005】
この発明の目的は、急な旋回の必要時に車両の旋回ヨーモーメントを効率的に発生させることができて、緊急操舵時の確実な転舵が行える車両のヨーモーメント発生旋回効率化装置を提供することである。
【課題を解決するための手段】
【0006】
この発明の車両20のヨーモーメント発生旋回効率化装置は、互いに同じ前後方向位置にある左右の車輪1L,1Rを独立して制動力制御または駆動力制御可能なブレーキ4L,4Rおよび駆動系6のいずれか一方と、前記左右の車輪1L,1Rを独立して転舵可能な転舵装置3とを備えた車両20において、
操舵手段18の操舵指令に従って前記転舵装置3を駆動するときに、左右の車輪1L,1Rの転舵動作に時間差を生じさせると共に、左右の車輪1L,1Rの制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う旋回アシスト制御手段9を設けたことを特徴とする。上記操舵手段18は、例えばステアリングホイールである。前記「制動・駆動力差」は、制動力差または駆動力差を意味し、制動力差と駆動力差の両方を生じさせるようにしても良い。
【0007】
この構成によると、旋回アシスト制御として、左右の車輪1L,1Rの制動・駆動力差を生じさせると共に、左右の車輪1L,1Rの転舵動作に時間差を生じさせる。この時間差は、片方の車輪1L,1Rの転舵の開始を遅らせるようにしても、また低速に転舵させるようにしても良い。この転舵動作に時間差により、旋回ヨーモーメントを発生させる車両20への力の向きは車両後ろ方向に向くことになり、車両20の旋回ヨーモーメントを効率的に発生させることができる。そのため、緊急操舵時の確実な転舵が行える。
なお、この旋回アシスト制御は、転舵角度を大きくする場合に限らず、転舵角度が中立角度に戻るように操舵する場合にも適用できる。
【0008】
この発明において、前記車両20が、前記左右の車輪1L,1Rを独立して制動力制御可能なブレーキ4L,4Rを備える場合に、前記旋回アシスト制御手段9は、転舵角度を大きくする場合の前記旋回アシスト制御として、旋回内側の車輪1L,1Rの転舵を遅れさせ、旋回内側の車輪1L,1Rが制動力大となるように左右の車輪1L,1Rの制動力差を生じさせるものとしても良い。
転舵角度を大きくする場合、旋回内側の車輪の転舵1L,1Rを遅れさせ、旋回内側の車輪1L,1Rが制動力大となるように左右の車輪1L,1Rの制動力差を生じさせることで、旋回ヨーモーメントを発生させる車両20への力の向きは車両後ろ方向に向くことになり、車両の旋回ヨーモーメントを効率的に発生させることができる。そのため、緊急操舵時の確実な転舵が行える。
【0009】
この発明において、前記旋回アシスト制御手段9は、前記操舵手段18の操舵指令から、設定規則Rに従って操舵の緊急度を判断する判断部11を有し、この判断部11により緊急度が高いと判断された場合のみ、前記旋回アシスト制御を行うようにしても良い。
急ハンドルのような緊急時を除き、通常の操舵時は、制動・駆動力差や、左右の車輪1L,1Rの転舵動作の時間差等の旋回アシストを行わなくても、操舵に応じた適切な転舵が可能である。また、操舵の違和感を生じさせないためにも、旋回アシストを行わない方が好ましい。このため、上記判断部11によって、操舵手段18の操舵指令から、緊急度、つまり運転者の障害物回避の意図を求め、緊急度が高いと判断された場合のみ、前記旋回アシスト制御を行うことで、操舵違和感を回避しながら、必要な場合に、旋回アシスト制御による旋回ヨーモーメントの効率的発生を行わせることができる。
【0010】
この発明において、前記判断部11による緊急度の判断は、前記操舵手段18の操舵角速度および操舵角加速度の値によって行うようにしても良い。一般的に、運転者の障害物回避の意図が強い場合は、操舵角速度の絶対値が大きくなる。また、操舵角加速度により、操舵の意図があるのか、保舵に移行したいかが判断できる。したがって、判断部11による緊急度の判断を、操舵手段18の操舵角速度および操舵角加速度の値によって行うことで、運転者の意図に応じた緊急度の判断が適切に行える。
【0011】
この発明において、前記判断部11は、前記操舵手段18の操舵指令による緊急度の判断に加え、車両20に設けられて車両20の衝突判断のための周囲環境を検出する周囲環境取得センサ14の検出内容に応じて緊急度を判断する機能を有するものとしても良い。周囲環境取得センサ14としては、前方を撮像するカメラ15や、障害物との間の距離を検出する距離センサ16、超音波センサ等の等がある。
このような周囲環境取得センサ14の検出内容を用いることで、障害物回避に必要な緊急度を判断することができる。操舵手段18の操舵指令による緊急度の判断に加え、周囲環境取得センサ14の検出内容を用いて判断することで、より適切な緊急度の判断が行える。
【0012】
この発明において、前記旋回アシスト制御手段9が、前記操舵手段18の操舵指令から、設定規則Rに従って操舵の緊急度を判断する判断部11を有する場合に、この判断部11で判断された緊急度が高いほど、前記左右の車輪1L,1Rの制動・駆動力差を生じさせる程度を定めるアシスト量を大きくするようにし、またはアシスト量の上限値を大きくするようにしても良い。
上記の左右車輪1L,1Rの転舵動作に時間差や、左右車輪1L,1Rの制動・駆動力差による旋回アシスト制御は、緊急時の転舵動作の確実化に貢献するが、過度の旋回アシスト制御は、旋回ヨーモーメントの必要以上の発生、必要以上の横加速度の発生、操舵の違和感、車輪の1L,1Rスリップに繋がる。そのため、左右車輪1L,1Rの制動・駆動力差を定めるアシスト量またはアシスト量の上限値を、緊急度と、周囲環境取得センサ14などより得られる各種情報に応じて調整することで、適切な旋回ヨーモーメント,横加速度を得ることができ、操舵の違和感低減、車輪のスリップ回避が行える。
【0013】
この発明において、前記判断部11は、定められた旋回アシスト終了条件を判断し、旋回アシスト終了条件を充足すると判断したときに、前記旋回アシスト制御手段9による旋回アシスト制御を終了させるようにしても良い。
旋回アシスト中は、アシスト量に応じて制動・駆動力が制御されるが、その間に条件変化が生じて旋回アシストが不要になることがある。このような条件変化を、前記判断部11で旋回アシスト終了条件と比較し、条件を充足すると、通常の操舵に移行させる。これにより、過度の旋回アシスト制御を回避して適切な旋回ヨーモーメント,横加速度を得ることができ、操舵の違和感低減、車輪のスリップ回避が行える。
【発明の効果】
【0014】
この発明の車両のヨーモーメント発生旋回効率化装置は、互いに同じ前後方向位置にある左右の車輪を独立して制動力制御または駆動力制御可能なブレーキおよび駆動系のいずれか一方と、前記左右の車輪を独立して転舵可能な転舵装置とを備えた車両において、
操舵手段の操舵指令に従って前記転舵装置を駆動するときに、左右の車輪の転舵動作に時間差を生じさせると共に、左右の車輪の制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う旋回アシスト制御手段を設けたため、急な旋回の必要時に車両の旋回ヨーモーメントを効率的に発生させることができて、緊急操舵時の確実な転舵が行える。
【図面の簡単な説明】
【0015】
【図1】この発明の一実施形態に係る車両のヨーモーメント発生旋回効率化装置の概念構成を示すブロック図である。
【図2】同ヨーモーメント発生旋回効率化装置による制御の流れ図である。
【図3】アシスト量、アシスト量の上限値、アシストゲイン、および緊急度の関係を示す説明図である。
【図4】同ヨーモーメント発生旋回効率化装置による旋回アシスト動作の説明図である。
【図5】従来の旋回アシスト動作の説明図である。
【発明を実施するための形態】
【0016】
この発明の一実施形態を図1〜図4と共に説明する。図1において、同実施形態が適用される車両20は、前輪となる車輪1L,1Rが転舵輪となる4輪の自動車、例えば乗用車であり、転舵輪となる左右の車輪1L,1Rを独立して転舵可能な転舵装置3を備える。走行駆動は、前輪となる車輪1L,1Rと、後輪となる車輪2L,2Rのいずれを駆動する形式であっても、4輪駆動であっても良く、またその駆動源は、エンジン等の内燃機関、電動モータのいずれであっても、両者のハイブリッド形式であっても良い。ただし、転舵輪となる左右の車輪1L,1Rを独立して制動力制御可能なブレーキ4L,4Rを、各車輪1L,1Rに対して設けてある。非転舵輪となる車輪2L,2Rのブレーキ5L,5Rは、左右輪の独立した制御が不可能なものであっても、可能なものであっても良い。各ブレーキ4L,4R,5L,5Rは、油圧式ブレーキであっても、その他の方式、例えば電動式やワイヤ式であっても良い。
【0017】
なお、転舵輪となる左右の車輪1L,1Rは、必ずしも独立して制動力制御可能ではなくても良いが、その場合は、左右の車輪1L,1Rを独立して駆動力制御可能な駆動系6が設けられたものとする。この駆動系6は、例えばインホイールモータ等の左右個別の駆動源6L,6Rである。なお、図1は、左右の車輪1L,1Rを独立して制動力制御可能とした例であり、左右輪を独立して駆動する駆動源6L,6Rを有しない例を示した図であるが、説明の便宜上、破線で駆動源6L,6Rのブロックを示すことで、駆動源6L,6Rを備える例を併記している。
【0018】
次に、制御系を説明する。ECU7は、車両20の全般の制御を行う電気制御ユニットであり、コンピュータや、これに実行されるプログラム、並びに電子回路により構成される。このECU7に、転舵に係る制御手段として、旋回基本動作制御手段8と、旋回アシスト制御手段9とが設けられている。
【0019】
旋回基本動作制御手段8は、操舵手段18の操舵指令に従って転舵装置3を制御する手段であり、上記操舵指令により、左右の車輪1L,1Rを同じ角度だけ転舵させる。操舵手段18は、例えばステアリングホイールであり、これによる操舵指令は、操舵手段18の回転角度である操舵角を検出する操舵角センサ19の出力である。
【0020】
旋回アシスト制御手段7は、操舵手段18の操舵指令に従って転舵装置3を駆動するときに、左右の車輪1L,1Rの転舵動作に時間差を生じさせると共に、左右の車輪1L,1Rの制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる制御である旋回アシスト制御を行う手段である。この旋回アシスト制御として生じさせる前記「制動・駆動力差」は、左右の車輪1L,1Rを個別に駆動する駆動系6を有しない場合は、制動力差であるが、左右個別に制御可能な駆動系6(駆動源6L,6R)を有する場合は駆動力差であっても良く、また左右個別に制御可能な駆動系6と左右個別に制御可能なブレーキ4L,4Rの両方を有する場合は、制動力差と駆動力差のいずれであっても、また両方であっても良い。旋回アシスト制御手段9は、演算部10と、判断部11と、制御部12とを備え、制御部12は制動・駆動力差制御部13と転舵時間差制御部14とで構成される。
【0021】
演算部10は、操舵角センサ19の出力する操舵角より、操舵角速度、および操舵角加速度を演算する手段である。演算部10は、必ずしも旋回アシスト制御手段9の一部として設けられていなくても良く、例えば操舵角センサ19の機能として設けられてもいても良い。つまり操舵角センサ19が操舵角速度および操舵角加速度を出力するものであっても良い。また、判断部11が演算部10の機能を有していても良い。
【0022】
判断部11は、操舵手段18の操舵指令から、設定規則Rに従って操舵の緊急度を判断する手段であり、制御部12は、この判断部11により緊急度が高いと判断された場合のみ旋回アシスト制御を行う。前記設定規則Rは、例えば、演算部10によって演算された操舵手段18の操舵角速度および操舵角加速度の値と、操舵の緊急度との関係を定めた規則である。前記設定規則Rは、より具体的には、例えば、運転者の状況に応じた操舵パターンであり、この操舵パターンと照らし合わせ判断を行う。運転者の状況に応じた操舵パターンは、車速、操舵角、操舵角速度、操舵角加速度の関係のパターン等である。上記操舵パターンは、試験やシミュレーション等に基づいて任意に設定すれば良く、また初期値を設定しておいて、実際の運転の繰り返しに応じて学習して更新を行うようにしても良い。
【0023】
判断部11は、操舵手段18の操舵指令による緊急度の判断に加え、周囲環境取得センサ14の検出内容に応じて緊急度を判断する機能を有するものとしても良い。周囲環境取得センサ14は、車両20に設けられて車両20の衝突判断のための周囲環境を検出するセンサ類の総称であり、例えば、前方カメラ15、距離センサ16、その他のセンサ17等である。その他のセンサ17は、例えば車速センサである。前方カメラ15は、車両20の前方を撮像するカメラであり、撮影した画像をディジタル信号で出力するCCDカメラ等である。前方カメラ15の出力は、判断部11の一部として、または判断部11とは別に設けられた画像処理手段(図示せず)で処理した結果が前記緊急度の判断に用いられる。距離センサ16は、車両20と障害物との間の距離を検出するセンサであり、超音波センサ等が用いられる。
【0024】
判断部11は、緊急度の判断の他に、緊急度が高いと判断された場合のみ旋回アシスト制御を行わせる指令を制御部12に対して行うが、この機能に加え、緊急度が高いほど、左右の車輪1L,1Rの制動・駆動力差を定めるアシスト量を大きくする指令、アシスト量と緊急度との割合を示すアシストゲインを大きくする指令、およびアシスト量の上限値を大きくする指令のうちのいずれか1つ、または任意の2つ、または全てを、制御部12の制動・駆動力差制御部13に対して与える機能を有するものとしてもよい。
【0025】
アシスト量、アシスト量の上限値、アシストゲイン、および緊急度は、例えば図3に示す関係にある。
(アシスト量)=〔(緊急度)−(アシスト閾値)〕×(アシストゲイン)
である。
ただし、0≦(アシスト量)≦(アシスト量上限値)
とする。
同図に示すように、アシスト量は、緊急度が高くなるに従い、アシストゲインを示す曲線に従って大きくなるが、緊急度が高くなってもアシスト量上限値より大きくはならず、アシスト量上限値で一定の値となる。
なお、アシスト閾値ET は、アシストを行う場合の最低の緊急度である。アシストゲインは、可変であり、車速などのいくつかのパラメータにより変化する。アシスト量上限値AMAX も、アシスト閾値ET と同じく可変であり、車速などのいくつかのパラメータにより変化する。アシスト閾値ET およびアシスト量上限値AMAX が各パラメータによってどのように変化するかは、旋回アシスト制御手段9において、適宜定めておく。
図3において、緊急度を示す横軸と、アシストゲインを示す線と、アシスト量上限値を示す横線とで囲まれた領域が、アシストを行う領域であるアシスト領域である。
【0026】
なお、判断部11は、緊急度の判断のみを行い、アシスト量を大きくする処理、アシストゲインを大きくする処理、およびアシスト量の上限値を大きくする処理は、制御部12が判断部11から与えられた緊急度に応じて行うようにしてもよい。
【0027】
また、判断部11は、定められた旋回アシスト終了条件を判断し、この旋回アシスト終了条件を充足すると判断したときに、旋回アシスト制御手段9の制御部12による旋回アシスト制御を終了させる指令を出力する。旋回アシスト制御を終了についても、判断部11は旋回アシスト終了条件の判断のみを行い、その判断結果に応じて、を制御部12が旋回アシスト制御を終了させるようにしても良い。
【0028】
前記制御部12の制動・駆動力差制御部13は、アシスト量設定部13aに設定されたアシスト量に応じて制動・駆動力差が生じるように、左右のブレーキ4L,4Rの制動力の制御、また左右の駆動源6L,6Rの駆動力の制御を行う手段である。アシスト量設定部13aは、アシスト量を自由に更新可能である。
【0029】
前記制御部12の転舵時間差制御部14は、左右の車輪1L,1Rの転舵動作に時間差を生じさせる手段である。この時間差は、いずれか片方の車輪1L,1Rの転舵の開始を遅らせるようにしても、また同時に転舵を開始させて低速に転舵させるようにしても、さらに転舵の開始の遅れと転舵の速度差との両方を生じさせるようにしても良い。
【0030】
次に、上記構成による作用および動作の流れを説明する。旋回アシスト制御手段9の各部のより具体的な機能は、以下の作用の説明と共に説明する。
作用の概要を説明すると、図5と共に前述したように、単に、転舵状態で制動・駆動力差を発生させた場合、制駆動力は車両内側を向くため、車両20の旋回方向と逆方向のモーメントが同時に発生し打ち消しあう。
そこで、この実施形態では、左右独立の転舵装置3を用い、図4のように旋回外側の車輪1Lは旋回方向に転舵させ、制動力を発生させる旋回内側の車輪1Rは即座には転舵させないか、または低速に転舵させる。これにより、同図(B)のように、旋回ヨーモーメントを発生させる。制動による車両20への力Fの向きは車両後ろ方向を向くため、車両の旋回ヨーモーメントMを効率的に発生させることができる。
【0031】
動作の流れの詳細を説明する。図2は、旋回アシスト制御手段9が行う制御の一例の流れ図であり、同図を参照して説明する。
ステップS1として、旋回アシストを行うか否かの判断材料の各種のパラメータを収集する。すなわち、判断部11により、操舵角センサ19の出力、および周囲環境取得センサ14の出力を監視し、緊急度(運転者の回避の意図)を求める。求められた緊急度が、定められた旋回アシスト条件を満たすか否かを判断する(S2)。この判断に基づき、条件を満たさない場合はパラメータ収集のステップ(S1)に戻る。なお、上記の各種のパラメータは、例えば、操舵角センサ19の出力から得られる操舵角、操舵角速度、操舵角加速度や、周囲環境取得センサ14から得られる各種の情報である。
【0032】
条件を満たす場合は、後述のように旋回内側の車輪1R(図4)の操舵を停止、または低速化し(S3)、かつ、判断部11または制動・駆動力差制御部13は、旋回ヨーモーメントを発生させる制動・駆動力のゲイン(アシストゲイン)、もしくはこれの上限値を決定し(S4,S5)、その値を用いて制動・駆動力差を定めるアシスト量を決定する(S6)。例えば、上記の収集された各種パラメータから、それぞれの定められた項目毎のアシストゲインを算出し(S4)、求められたそれぞれのアシストゲインとアシスト量を統合し、採用するアシストゲインの値を決定する。例えば、採用するアシストゲインの値は、最大のアシストゲインとする(S5)。項目毎のアシストゲインは、例えば上記パラメータ毎のアシストゲインである。緊急度と採用されたアシストゲインからアシスト量を決定する。この値がアシスト量上限値よりも大きければ、値は制限される(S6)。
【0033】
これらの過程(S1〜S6)で、判断部11は、演算部10から得られる操舵情報を用いて判断を下す場合、設定規則Rに応じて、例えば運転者の状況に応じた操舵パターンと照らし合わせ判断を行う。緊急度が高く、運転者の回避の意図が強い場合は、操舵角速度の絶対値が大きくなる。具体例を挙げると、判断部11は、この操舵角速度の絶対値に閾値を定め、αとする。また、操舵角加速度より、操舵の意図があるか、保舵に移行したいかが判断できる。以上から具体的な判断を行うと、操舵角が正の場合(操舵角:反時計回りを正)、(操舵角速度)>α、かつ(操舵角加速度)>0の時は緊急性の高い切り増し状態であり、(操舵角速度)<−α、かつ(操舵角加速度)<0の時は緊急性の高い切り戻し状態と判断し、旋回アシスト制御を行う条件とする。なお、操舵角が負の場合はαが負の値となり、大小符号も逆となる。また、それぞれの絶対値が大きいほど、制動・駆動力差制御部13のアシスト量設定部13aに設定するアシスト量を大きくする。
【0034】
また、判断部11は、前方カメラ15や距離センサ16、超音波センサ等の周囲環境取得センサ14を用いて回避の緊急度を判断する場合、障害物との距離、車両横方向に必要な回避量を求めることで、緊急度の判断を行う。障害物までの距離が短く必要な回避量が大きい場合緊急度が高く、緊急度が一定以上であることを、旋回アシスト制御を行う条件とする。また緊急度が高いほど、アシストゲインを大きくする。
【0035】
アシストゲインを設定するについては、緊急度以外の条件も参照する。車速が低い場合の運転者は、制動・駆動力の変化に敏感であるため、アシストゲインを小さくする必要がある。また、ABS(アンチロックブレーキ)動作や各種センサ17の情報から路面摩擦係数が小さいと判断される場合は、強い制駆動力の発生がスリップの原因になると考えられるため、アシストゲインを小さくする。これと同様に、必要以上の旋回ヨーモーメント、横加速度の発生時にも、違和感低減とスリップ回避のためにアシストゲインを小さくする。
なお、上記のアシストゲインの計算は、転舵中や旋回アシスト制御中も常に行い、求められたアシストゲインを用いてアシスト量を計算し、アシスト量設定部13aのアシスト量の設定値を常に更新する。
【0036】
制御部12の制動・駆動力差制御部13は、上記のように計算されてアシスト量設定部13aに設定されているアシスト量に応じ、ブレーキ4L,4R、または駆動源6L,6Rの制動・駆動力の制御を行う(S7)。
ブレーキ4L,4Rを用いる場合は、アシスト量に応じて左右の制動力に差を生じさせ(片側が0も含む)、旋回内側の車輪(図4では右側の車輪1R)の制動力を、外側の車輪(1L)の制動力に比べて大きくする。
【0037】
インホイールモータ搭載車に代表される左右駆動力の独立制御可能な駆動系6(駆動源6L,6R)を持つ場合は、ブレーキ4L,4Rの使用に加え、旋回内側の車輪1Rに負の駆動力を発生させる。以上により、路面から左右の車輪1L,Rに外力が生じ、制動力・駆動力差外力が車両20にヨーモーメントを発生させることができ、これを旋回アシストとする。
【0038】
以上の動作と同時に、制動・駆動力差による旋回ヨーモーメントをより効率的に発生させるために、左右独立の転舵機構3を用いて旋回内側の車輪1Rの転舵を停止もしくは低速にして、制駆動力発生による路面からの外力と車両20の進行方向とのなす角を小さくする(S3)。これにより、転舵状態で制動・駆動力差を発生させた際に生じる、旋回ヨーモーメントを打ち消す方向の力を抑えることができる。
【0039】
旋回内側の車輪1Rの転舵を停止もしくは低速にすることにより旋回ヨーモーメントの効率的な発生を実現するが、このまま旋回する場合には、旋回内側の車輪1Rが抵抗となり、旋回を妨げてしまう。そこで、転舵時間差制御部14は、上記ように旋回ヨーモーメントを発生させ、旋回を開始した後に、旋回内側の車輪1Rの転舵角を操舵に追従させる(S9)。
【0040】
旋回アシスト中も、刻々と変化するアシスト量に応じて制動・駆動力を制御するが、判断部11は旋回アシスト中も旋回アシスト条件を常に判断し(S8)、旋回アシスト終了条件を充足した場合、例えば旋回アシスト条件より外れた場合、旋回アシスト制御を終了し通常の操舵に移行し、ステップS1に戻る。通常の操舵は、旋回基本動作制御手段8による操舵である。この旋回アシスト制御を終了させる旋回アシスト終了条件は、旋回アシストを開始させる条件と異なる条件であっても良く、また同じ条件であっても良い。
【0041】
操舵角が、先に示した旋回アシストの条件を満たす時間は、運転条件・運転者によって異なるが、実測値で200ms程度であり、車両20への操舵角入力から旋回ヨーモーメントの発生までの時間である、約200msにほぼ一致する。そのため、操舵情報を条件とした場合、旋回アシスト終了の条件も操舵情報を参考とする。
【0042】
これ以外の、判断部11の判断する旋回アシスト終了の条件として、前記その他のセンサ17の一つである搭載した加速度・角速度センサの情報を用いた旋回ヨーモーメント・横加速度の検出が挙げられる。車両20に発生した旋回ヨーモーメント・横加速度を、アシストゲイン算出や旋回アシスト終了の条件のパラメータとして用いる。何れの場合においても、車両20の運動特性に効果が左右されるため、一定の遅延時間を設定するなどして調整するのが良い。また、ハンチング(判断材料となるパラメータがオン・オフ条件の境目に存在し、オン・オフを繰り返すこと)を防止するために、一定のフィルタ・遅延時間を設定することが好ましい。
【0043】
この実施形態の車両20のヨーモーメント発生旋回効率化装置によると、このようにして、急な旋回の必要時に車両20の旋回ヨーモーメントを効率的に発生させることができ、緊急操舵時の確実な転舵を行うことができる。
【0044】
なお、上記実施形態は、前輪転舵形式の場合につき説明したが、後輪転舵形式の車両の場合にも、この発明を適用することができる。
【符号の説明】
【0045】
1L,1R…車輪
3…転舵装置
4L,4R…ブレーキ
6…駆動系
6L,6R…駆動源
8…旋回基本動作制御手段
9…旋回アシスト制御手段
10…演算部段
11…判断部
12…制御部
13…制動・駆動力差制御部
14…周囲環境取得センサ
15…カメラ
16…距離センサ
17…その他のセンサ
18…操舵手段
19…操舵角センサ
20…車両
M…ヨーモーメント
R…設定規則
【特許請求の範囲】
【請求項1】
互いに同じ前後方向位置にある左右の車輪を独立して制動力制御または駆動力制御可能なブレーキおよび駆動系のいずれか一方と、前記左右の車輪を独立して転舵可能な転舵装置とを備えた車両において、
操舵手段の操舵指令に従って前記転舵装置を駆動するときに、左右の車輪の転舵動作に時間差を生じさせると共に、左右の車輪の制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う旋回アシスト制御手段を設けたことを特徴とする車両のヨーモーメント発生旋回効率化装置。
【請求項2】
請求項1において、前記車両は、前記左右の車輪を独立して制動力制御可能なブレーキを備え、前記旋回アシスト制御手段は、転舵角度を大きくする場合の前記旋回アシスト制御として、旋回内側の車輪の転舵を遅れさせ、旋回内側の車輪が制動力大となるように左右の車輪の制動力差を生じさせる車両のヨーモーメント発生旋回効率化装置。
【請求項3】
請求項1または請求項2において、前記旋回アシスト制御手段は、前記操舵手段の操舵指令から、設定規則に従って操舵の緊急度を判断する判断部を有し、この判断部により緊急度が高いと判断された場合のみ、前記旋回アシスト制御を行うようにした車両のヨーモーメント発生旋回効率化装置。
【請求項4】
請求項3において、前記判断部による緊急度の判断を、前記操舵手段の操舵角速度および操舵角加速度の値によって行う車両のヨーモーメント発生旋回効率化装置。
【請求項5】
請求項3または請求項4において、前記判断部は、前記操舵手段の操舵指令による緊急度の判断に加え、車両に設けられて車両の衝突判断のための周囲環境を検出する周囲環境取得センサの検出内容に応じて緊急度を判断する機能を有するものとした車両のヨーモーメント発生旋回効率化装置。
【請求項6】
請求項3ないし請求項5のいずれか1項において、前記判断部で判断された緊急度が高いほど、前記左右の車輪の制動・駆動力差を生じさせる程度を定めるアシスト量を大きくする車両のヨーモーメント発生旋回効率化装置。
【請求項7】
請求項3ないし請求項5のいずれか1項において、前記旋回アシスト制御手段は、前記判断部で判断された緊急度が高いほど、前記左右の車輪の制動・駆動力差を生じさせる程度を定めるアシスト量の上限値を大きくする車両のヨーモーメント発生旋回効率化装置。
【請求項8】
請求項3ないし請求項7のいずれか1項において、前記判断部は、定められた旋回アシスト終了条件を判断し、旋回アシスト終了条件を充足すると判断したときに、前記旋回アシスト制御手段による旋回アシスト制御を終了させる車両のヨーモーメント発生旋回効率化装置。
【請求項1】
互いに同じ前後方向位置にある左右の車輪を独立して制動力制御または駆動力制御可能なブレーキおよび駆動系のいずれか一方と、前記左右の車輪を独立して転舵可能な転舵装置とを備えた車両において、
操舵手段の操舵指令に従って前記転舵装置を駆動するときに、左右の車輪の転舵動作に時間差を生じさせると共に、左右の車輪の制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う旋回アシスト制御手段を設けたことを特徴とする車両のヨーモーメント発生旋回効率化装置。
【請求項2】
請求項1において、前記車両は、前記左右の車輪を独立して制動力制御可能なブレーキを備え、前記旋回アシスト制御手段は、転舵角度を大きくする場合の前記旋回アシスト制御として、旋回内側の車輪の転舵を遅れさせ、旋回内側の車輪が制動力大となるように左右の車輪の制動力差を生じさせる車両のヨーモーメント発生旋回効率化装置。
【請求項3】
請求項1または請求項2において、前記旋回アシスト制御手段は、前記操舵手段の操舵指令から、設定規則に従って操舵の緊急度を判断する判断部を有し、この判断部により緊急度が高いと判断された場合のみ、前記旋回アシスト制御を行うようにした車両のヨーモーメント発生旋回効率化装置。
【請求項4】
請求項3において、前記判断部による緊急度の判断を、前記操舵手段の操舵角速度および操舵角加速度の値によって行う車両のヨーモーメント発生旋回効率化装置。
【請求項5】
請求項3または請求項4において、前記判断部は、前記操舵手段の操舵指令による緊急度の判断に加え、車両に設けられて車両の衝突判断のための周囲環境を検出する周囲環境取得センサの検出内容に応じて緊急度を判断する機能を有するものとした車両のヨーモーメント発生旋回効率化装置。
【請求項6】
請求項3ないし請求項5のいずれか1項において、前記判断部で判断された緊急度が高いほど、前記左右の車輪の制動・駆動力差を生じさせる程度を定めるアシスト量を大きくする車両のヨーモーメント発生旋回効率化装置。
【請求項7】
請求項3ないし請求項5のいずれか1項において、前記旋回アシスト制御手段は、前記判断部で判断された緊急度が高いほど、前記左右の車輪の制動・駆動力差を生じさせる程度を定めるアシスト量の上限値を大きくする車両のヨーモーメント発生旋回効率化装置。
【請求項8】
請求項3ないし請求項7のいずれか1項において、前記判断部は、定められた旋回アシスト終了条件を判断し、旋回アシスト終了条件を充足すると判断したときに、前記旋回アシスト制御手段による旋回アシスト制御を終了させる車両のヨーモーメント発生旋回効率化装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−39892(P2013−39892A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2011−179542(P2011−179542)
【出願日】平成23年8月19日(2011.8.19)
【出願人】(000102692)NTN株式会社 (9,006)
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願日】平成23年8月19日(2011.8.19)
【出願人】(000102692)NTN株式会社 (9,006)
【Fターム(参考)】
[ Back to top ]