
車両のロール制御システム
本発明は、フロントおよびリアのアクスルのレベルでアンチロールバーの剛性に作用し、特に車両の横方向加速度に応じてECUによって制御されるアクチュエータを備える自動車両用アクティブアンチロールシステムの制御方法において、カーブで、フロントおよびリアのアクスルに加えるべき全アンチロールトルクを決定し、前記全アンチロールトルクが、転回時の2つの内輪の一方にその浮き上がりを阻止する最小荷重がかかるように計算された2つのアクスル間の最適な剛性配分に由来するものであり、かつ、ハンドル操作時の車両の横方向加速度、速度および静的ゲインに応じて定められる所望の設定点に対応するものであることを特徴とする制御方法に関する。

【発明の詳細な説明】
【発明の開示】
【0001】
本発明は、車両の挙動を改善すること、したがって運転者の安全性および運転の快適性を改善することを目的として、コーナリング時に内輪の1つが浮き上がり、車両が転覆するリスクを低減するための車両のアクティブアンチロールシステムの制御方法および制御システムに関する。
【0002】
自動車両は、運転者による操作、とりわけ操舵関連の操作、または路面のグリップ状態にかかわらず、できるだけ安定した挙動を示すように設計される。しかし、ある種の運転状況は、コーナリング時に内輪の1つまたは2つともを浮き上がらせ、しばしば車両の転覆にまで至らせる可能性がある。そうした状況は、車両の重心が高く、同一車軸の2つの車輪の間隔であるトレッドが狭いほど可能性が高まる。
【0003】
アンチロールシステムは、とりわけ、そうした微妙な状況、例えばカーブにおける車両の挙動を改善することを可能にする。そのために、アンチロールシステムは、車両の横方向加速度γTに関する情報をセンサから受け取り、別のセンサから車両の速度Vを決定できる車輪の速度に関する情報を受け取るECU(電子制御装置)を一般に備える。また、アンチロールシステムは、車台と4つの車輪それぞれとの間に配設されたサスペンションの剛性またはフロントおよびリアのアクスルのレベルでのアンチロールバーの剛性に作用することができるアクチュエータも備える。これらのアクチュエータは、サスペンションの剛性を変えることができる油圧式もしくは電動式シリンダ、または剛性制御式のアクティブサスペンション要素を備えることができる。
【0004】
車輪が浮き上がるリスク、さらに車両の転覆までを含めたリスクを低減するための現状の解決策は、例えば、TOYOTAを出願人として出願された欧州特許出願EP0376306B1に記載されている。この解決策は、制御式サスペンションシステムを利用する。このようなシステムは、興味深いと判断されるためにはコストパフォーマンスがあまりに低い。
【0005】
本発明の狙いは、車輪が路面から浮き上がるリスクおよび車両が転覆するリスクを低減するようにアクティブアンチロールシステムを制御することにある。
【0006】
そのために、本発明の第1の目的は、フロントおよびリアのアクスルのレベルでアンチロールバーの剛性に作用し、特に車両の横方向加速度に応じてECUによって制御されるアクチュエータを備える自動車両用アクティブアンチロールシステムの制御方法において、フロントおよびリアのアクスルに加えるべき全アンチロールトルクを決定し、前記全アンチロールトルクが、コーナリング時の2つの内輪の一方にその浮き上がりを阻止する最小荷重がかかるように計算された2つのアクスル間の最適な剛性配分に由来するものであり、かつ、ハンドル操作時の車両の横方向加速度、速度および静的ゲインに応じて定められる所望の設定点に対応するものであることを特徴とする制御方法である。
【0007】
もう1つの特徴によれば、カーブで前内輪または後内輪の浮き上がりを防止するために、本方法は、該前内輪または該後内輪に最小荷重がかかるようにするフロントアクスルまたはリアアクスルへの剛性配分の最大値を車両の横方向および長手方向の加速度に応じて計算する。
【0008】
もう1つの特徴によれば、両アクスルアクティブアンチロールシステムの場合に、決定された全アンチロールトルクは、前後2つの内輪の一方に対応する最適な剛性配分であって、車両の横方向加速度、速度および静的ゲインに応じて定められる剛性配分の設定点を車輪の浮き上がりを防ぐ配分の最大値で飽和させることによって得られる最適な剛性配分に従って、フロントおよびリアの2つのアクスルの間に配分される。
【0009】
もう1つの特徴によれば、リアアクスルに作用する単アクスルアクティブアンチロールシステムの場合に、決定された全アンチロールトルクは、前後2つの内輪の一方に対応するリアの最適な剛性配分であって、車両の横方向加速度、速度および静的ゲインに応じて定められる剛性の配分設定点を車輪の浮き上がりを防ぐ最大値で飽和させることによって得られるリアの最適な剛性配分に従って、リアアクスルに加えられる。
【0010】
もう1つの特徴によれば、フロントアクスルに作用する単アクスルアクティブアンチロールシステムの場合に、決定された全アンチロールトルクは、前後2つの内輪の一方に対応するリアの最適な剛性配分であって、車輪の浮き上がりを防ぐ剛性配分の最大値で飽和されたフロントの剛性の配分設定点から得られるリアの最適な剛性配分に従って、フロントアクスルに加えられる。
【0011】
本発明の第2の目的は、アンチロールバーの剛性に作用するアクチュエータを制御するECUを備えた車両用アクティブアンチロールシステムの制御装置において、
− 路面から内輪の浮き上がりを防ぐ最小荷重を、対象となる内輪が受けるように、車両の2つのアクスルに加えられる剛性の最大配分を計算する手段であって、入力部で車両の長手方向加速度と横方向加速度を受け取る手段と、
− アンチロールシステムのアクチュエータに加える全アンチロールトルク設定点を計算する手段と、
− 対象の前内輪または後内輪の浮き上がりを防止する手段であって、フロントまたはリアのアクティブアンチロールバーに配分される飽和トルクを計算する手段と、
を備えることを特徴とする制御装置である。
【0012】
車両用の両アクスルアクティブアンチロールシステムのための制御装置のもう1つの特徴によれば、アンチロールシステムのアクチュエータに加える全アンチロールトルク設定点を計算する手段が、車両のフロントおよびリアのアクスルに加えられる剛性の配分設定点も計算する。
【0013】
車両用の両アクスルアクティブアンチロールシステムのための制御装置のもう1つの特徴によれば、内輪の浮き上がりを防止する手段は、
− 前または後内輪の浮き上がり防止のために計算される最大配分によって、フロントとリアのアクスル間の剛性の配分設定点を飽和させる機能であって、出力部で荷重配分の上限と下限の間の飽和値を送出する機能と、
− 剛性の配分設定点のその飽和値にアンチロールトルク設定点を掛け合わせてトルク設定点を送出する乗算の機能であって、フロントアクスルへの剛性の飽和配分にアンチロールトルク設定点を掛け合わせてフロントトルク設定点を与える乗算と組み合わされた乗算の機能と、
をそれぞれ果たす。
【0014】
車両用の単アクスルアクティブアンチロールシステムのための制御装置のもう1つの特徴によれば、計算手段からの後内輪浮き上がり防止のための最大配分と、全アンチロールトルク設定点とを入力部で受け取る内輪の浮き上がり防止手段は、
− その全トルク設定点の絶対値を計算する機能と、
− その全トルク設定点の絶対値と、車両に特徴的であり、車両の開発時にマッピングによって確定されるフロントとリアのアクスル間の剛性の配分設定点の絶対値とを対応させる機能と、
− アンチロール剛性配分を飽和させる機能であって、最大配分値とマッピングによって得られる設定点値とを比較し、配分設定点が最大配分よりも小さいときは、リアアクスルに加える全トルク設定点の計算でその設定点を考慮に入れ、設定点が最大配分よりも大きいときは、設定点を最大配分で置き換えて全トルクを得る機能と、
− リアアクスルアクチュエータに送る全トルクを、荷重配分対トルク曲線の反転と、次いで全トルク設定点の符号に応じて行う±1の乗算とによって計算する機能と、
をそれぞれ果たす。
【0015】
車両用の両アクスルアクティブアンチロールシステムのための制御装置のもう1つの特徴によれば、リアアクスルにアンチロールシステムがある場合の前輪の浮き上がり防止では、飽和機能は、フロントの剛性の最大値を考慮に入れ、そこからリアの剛性の値を導き出して、それを全トルク設定点から得られる所望の配分設定点と比較する。
【0016】
本発明のその他の特徴および利点は、以下の図に示された本発明の2つの実施形態の説明を読むことで明らかになるであろう。
【0017】
本発明は、コーナリング時に内側になる車両の車輪のうちの1つの浮き上がりを防止するために、両アクスルアンチロールシステムの場合は、定義された配分に従って2つのアクスルそれぞれに加えるべき、または単アクスルシステムの場合は、2つのアクスルのうちの一方に加えるべき、最適な全アンチロールトルクを計算するものである。
【0018】
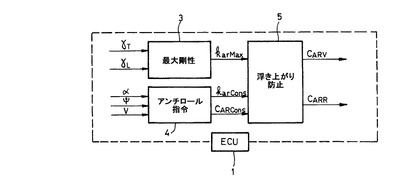
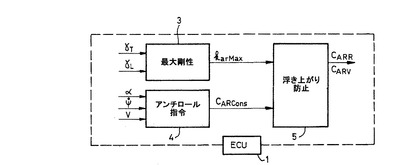
図1に示すように、車両用の両アクスルアンチロールシステムの制御装置の場合、装置は、センサによって測定されたものであれ、推定されたものであれ、車両の長手方向加速度γLと横方向加速度γTとを入力部で受け取る。
【0019】
車両の速度Vと、運転者によって与えられる力Ffに相当する制動要求とからオブザーバによって長手方向加速度を推定する場合、長手方向加速度γLは、力Ffを車両の最大重量Mmaxで割った商によって表される。すなわち、
【0020】
荷重移動を低めに評価するために、信号は低めに評価することが好ましい。
【0021】
オブザーバは、次のようにして加速度に関する誤差dをモデル化する。
【0022】
パラメータk1およびk2は、導出の迅速性とノイズ感度との間の折合いを図るものである。
【0023】
2つの車輪モデルによって横方向加速度を推定する場合、そのモデルはフロントアクスルの平均操舵角αと車両の速度Vを以下の方程式に当てはめて用いる。
【0024】
これらの方程式では、Mは車両の全重量、Vはその速度、
はそのヨー速度、Izはその重心を通る垂直軸の周りでのその慣性、L1およびL2は重心から前後それぞれの車軸までの距離、αはフロントアクスルの平均操舵角、D1およびD2はフロントおよびリアそれぞれのアクスルの偏流剛性(drift stiffness)、δは偏流角(drift angle)をそれぞれ示す。
【0025】
制御システムはとりわけ、ハンドル角α、ヨー速度
、車両の長手方向速度Vのような、アンチロール制御法則で利用される複数の信号をさらに受け取る。
【0026】
同システムは、路面から内輪の浮き上がりを防ぐ最小荷重であって、タイヤに加えられる垂直応力Fzである荷重が対象の内輪にかかるようにするために、車両の2つのアクスルに加えられる剛性の最大配分を計算する手段3を備える。Fzijは車軸jの車輪iに加えられる垂直応力であり、iとjは、1または2の整数である。
【0027】
フロントアクスルの車輪については、荷重は、横方向加速度γT、長手方向加速度γLおよび車両重量の関数として次式で表される。
【0028】
リアアクスルの2つの車輪については次のとおりである。
ただし、kav+kar=1である。
【0029】
本発明による方法は、車両の横および長手方向の加速度に応じて、コーナリング時の内輪の1つに最小荷重がかかるようにする、フロントアクスルとリアアクスルとの間の剛性配分を決定する。
【0030】
コーナリング時の内輪である車両後輪の場合、その荷重FZarintは最小荷重FZarintMin以上でなければならず、そのため、リアアクスルへのアンチロール剛性配分karは、以下のように定義される最大値karMax以下でなければならないことになる。
【0031】
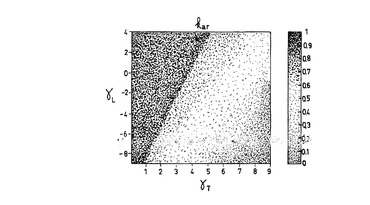
横方向加速度γT、長手方向加速度γLおよびリアアクスルへの剛性配分karによって定義される車両の動作領域を表した図2に示されるように、γT=6m.s−2およびγL=2m.s−2で、karが0.6超のとき、コーナリング時の内輪である後輪は路面から浮き上がることがわかる。
【0032】
コーナリング時の内輪である車両前輪の場合は、その荷重FZavintが最小値FZavinMinを上回って、フロントアクスルkavへの剛性配分が以下のようにして定義される最大値kavMax以下となるようにしなければならない。
【0033】
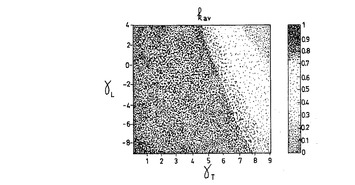
図3は、横方向加速度γT、長手方向加速度γLおよびフロントアクスルへの剛性配分kavによって定義される車両の動作領域を示す。ここから、リアアクスルへの剛性配分karMax=1−kavMaxが導き出される。
【0034】
本方法は、こうしてフロントおよびリアの2つのアクスル間における荷重の最大配分を決定し、それとともに、手段4で、アンチロールシステムのアクチュエータに加える全アンチロールトルク設定点CARConsを計算する。両アクスルアンチロールシステムの場合、すなわち、2つのアクスルに作用するアクチュエータを備えるシステムの場合、本方法は、アンチロール制御法則に従って特に車両の横方向加速度γTおよび速度Vによって定義される運転状況に応じて車両の所望の静的応答を得るために2つのアクスルの間に加えるべき剛性の配分設定点karConsも計算する。
【0035】
そのため、手段4の出力部で、本方法は全アンチロールトルク設定点CARConsと所望のアンチロール荷重配分設定点karConsを送出する。フロントまたはリアの対象となる内輪の浮き上がり防止手段5において、本方法は、フロントまたはリアのアクティブアンチロールバーに配分される飽和トルクを計算する。このアンチロールトルクの飽和は、計算されたトルク値が実際に加えることができるようにするために必要なものである。実際、トルクの配分はアクティブアンチロールバーから行われるので、サスペンションスプリングも車両のロール剛性およびその配分に寄与する。k=0、すなわちリアのロール剛性がゼロの場合、またはk=1、すなわちフロントのロール剛性がゼロの場合にそれぞれ相当する配分に近い極値に到達することはできず、そのため、配分は、例えば0.1と0.9の間で飽和させる必要がある。
【0036】
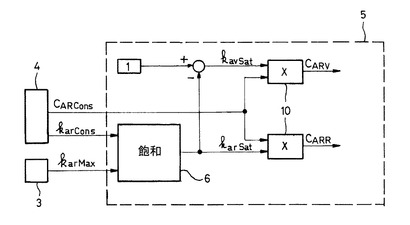
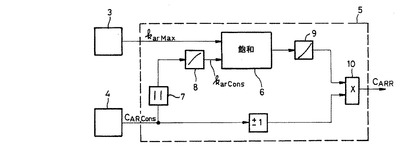
内輪の浮き上がり防止手段5は、図4に示す以下の様々な機能を果たす。アンチロール剛性の配分を飽和させる機能6は、手段3で計算される後内輪浮き上がり防止のための最大配分karMax、または前内輪浮き上がり防止のためのkavMaxと、手段4で計算されるフロントとリアのアクスル間の剛性の配分設定点karConsとを入力部で受け取り、出力部で荷重配分karSatの上限と下限の2つの間の飽和値を送出する。車両の2つのアクスルの間のこの配分は、アンチロールトルク設定点CARConsと掛け合わされる乗算10によってフロントのトルク設定点CARVを与えるフロントアクスルへの剛性の飽和配分kavSatと、同じくアンチロールトルク設定点CARConsと掛け合わされることでリアアクスルに加えるトルク設定点CARRを与えるリアアクスルへの剛性の飽和配分karSatとをもたらす。
【0037】
単アクスルアンチロールシステムの場合、車両のアクティブアンチロール式の単一のアクスルにアクチュエータによって加えられる全トルクは、図5のブロック図に示すように計算され、2つのアクスルの間の剛性の配分はトルク設定点CARConsから導き出される。
【0038】
両アクスルアンチロールシステムの場合と同様、本方法は、同じ理由から、フロントまたはリアのアクティブアンチロールアクスルのアクチュエータに送る飽和トルクを計算する。前内輪または後内輪の浮き上がり防止手段5は、フロントの単アクスルアンチロール、またはリアの単アクスルアンチロールによって、図6または図7の線図に示された機能を果たす。
【0039】
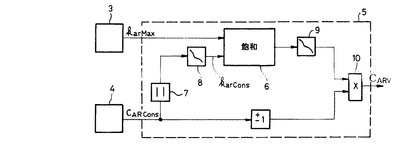
リアの単アクスルアンチロールで、後内輪の浮き上がりを防止する場合(図6)、車輪の浮き上がり防止手段5は、後内輪の浮き上がりを防止するための最大配分karMaxを計算手段3から、全アンチロールトルク設定点CARConsを手段4からそれぞれ入力部で受け取る。この所望の全トルク設定点の絶対値7には、車両に特徴的であり、車両の開発時にマッピング8によって確定されるフロントとリアのアクスル間の剛性配分設定点karConの値が組み合わされる。アンチロールトルクがフロントで増大すると、リアへの荷重の分配が減少する。
【0040】
最大配分値karMaxとマッピングで得られる設定点karConsの値は、配分設定点の飽和機能6で比較される。配分設定点が最大配分よりも小さいときは、リアアクスルに加える全トルク設定点の計算でその設定点を考慮に入れる。反対に、設定点karConsが最大配分よりも大きいときは、設定点を最大配分で置き換えて全トルクを得る。
【0041】
リアアクスルのアクチュエータに送る全トルクの計算は、前出の荷重配分対トルク曲線を反転させ9、次いで全トルク設定点CARConsの符号に応じて±1を乗ずる10ことによって得られる。
【0042】
リアアクスルにアンチロールシステムがある場合の前輪の浮き上がりを防止する場合、飽和機能6は、手段3で計算されるフロントの剛性の最大値kavMaxを考慮に入れ、そこからリアの剛性の値を導き出し(karMax=1−kavMax)、それを全トルク設定点CARConsから得られる所望の配分設定点と比較する。
【0043】
図7は、車両のフロントアクスルのアンチロールシステムに相当する。この場合、加えるべき全トルク設定点をリアの荷重配分設定点と結び付けるマッピング8は、リアの単アクスルの場合と逆の特徴を示す。
【0044】
実際、フロントアクスルに加えられるトルクの増大はリアアクスルへの荷重の配分の減少をもたらす。前出の場合と同様、全トルク設定点CARConsから得られる所望の剛性の配分設定点karConsは、最大配分karMaxと比較され、その値よりも大きければ、その値で置き替えられる。
【0045】
したがって、この制御方法は、アクティブアンチロールシステムに作用することによって、コーナリング時の内輪の浮き上がりを遅らせるか、または防ぐことができるものであり、連続的に動作するという利点を有する。この方法は、当該技術からすれば運転状況によって変化するトルクまたは剛性配分の飽和に相当すると見なすことができる。
【図面の簡単な説明】
【0046】
【図1】車両の両アクスルアンチロール装置の制御システムのブロック図である。
【図2】横方向加速度γTと、長手方向加速度γLと、リアアクスルに対する剛性配分karとによって定義される車両の動作領域を示す。
【図3】横方向加速度γTと、長手方向加速度γLと、フロントアクスルに対する剛性配分karとによって定義される車両の動作領域を示す。
【図4】両アクスルアンチロールシステムの場合の前または後内輪の浮き上がり防止手段の詳細ブロック図である。
【図5】単アクスルアンチロール装置の制御システムのブロック図である。
【図6】フロントの単アクスルアンチロールシステムの場合の前または後内輪の浮き上がり防止手段の詳細ブロック図である。
【図7】リアの単アクスルアンチロールシステムの場合の前または後内輪の浮き上がり防止手段の詳細ブロック図である。
【発明の開示】
【0001】
本発明は、車両の挙動を改善すること、したがって運転者の安全性および運転の快適性を改善することを目的として、コーナリング時に内輪の1つが浮き上がり、車両が転覆するリスクを低減するための車両のアクティブアンチロールシステムの制御方法および制御システムに関する。
【0002】
自動車両は、運転者による操作、とりわけ操舵関連の操作、または路面のグリップ状態にかかわらず、できるだけ安定した挙動を示すように設計される。しかし、ある種の運転状況は、コーナリング時に内輪の1つまたは2つともを浮き上がらせ、しばしば車両の転覆にまで至らせる可能性がある。そうした状況は、車両の重心が高く、同一車軸の2つの車輪の間隔であるトレッドが狭いほど可能性が高まる。
【0003】
アンチロールシステムは、とりわけ、そうした微妙な状況、例えばカーブにおける車両の挙動を改善することを可能にする。そのために、アンチロールシステムは、車両の横方向加速度γTに関する情報をセンサから受け取り、別のセンサから車両の速度Vを決定できる車輪の速度に関する情報を受け取るECU(電子制御装置)を一般に備える。また、アンチロールシステムは、車台と4つの車輪それぞれとの間に配設されたサスペンションの剛性またはフロントおよびリアのアクスルのレベルでのアンチロールバーの剛性に作用することができるアクチュエータも備える。これらのアクチュエータは、サスペンションの剛性を変えることができる油圧式もしくは電動式シリンダ、または剛性制御式のアクティブサスペンション要素を備えることができる。
【0004】
車輪が浮き上がるリスク、さらに車両の転覆までを含めたリスクを低減するための現状の解決策は、例えば、TOYOTAを出願人として出願された欧州特許出願EP0376306B1に記載されている。この解決策は、制御式サスペンションシステムを利用する。このようなシステムは、興味深いと判断されるためにはコストパフォーマンスがあまりに低い。
【0005】
本発明の狙いは、車輪が路面から浮き上がるリスクおよび車両が転覆するリスクを低減するようにアクティブアンチロールシステムを制御することにある。
【0006】
そのために、本発明の第1の目的は、フロントおよびリアのアクスルのレベルでアンチロールバーの剛性に作用し、特に車両の横方向加速度に応じてECUによって制御されるアクチュエータを備える自動車両用アクティブアンチロールシステムの制御方法において、フロントおよびリアのアクスルに加えるべき全アンチロールトルクを決定し、前記全アンチロールトルクが、コーナリング時の2つの内輪の一方にその浮き上がりを阻止する最小荷重がかかるように計算された2つのアクスル間の最適な剛性配分に由来するものであり、かつ、ハンドル操作時の車両の横方向加速度、速度および静的ゲインに応じて定められる所望の設定点に対応するものであることを特徴とする制御方法である。
【0007】
もう1つの特徴によれば、カーブで前内輪または後内輪の浮き上がりを防止するために、本方法は、該前内輪または該後内輪に最小荷重がかかるようにするフロントアクスルまたはリアアクスルへの剛性配分の最大値を車両の横方向および長手方向の加速度に応じて計算する。
【0008】
もう1つの特徴によれば、両アクスルアクティブアンチロールシステムの場合に、決定された全アンチロールトルクは、前後2つの内輪の一方に対応する最適な剛性配分であって、車両の横方向加速度、速度および静的ゲインに応じて定められる剛性配分の設定点を車輪の浮き上がりを防ぐ配分の最大値で飽和させることによって得られる最適な剛性配分に従って、フロントおよびリアの2つのアクスルの間に配分される。
【0009】
もう1つの特徴によれば、リアアクスルに作用する単アクスルアクティブアンチロールシステムの場合に、決定された全アンチロールトルクは、前後2つの内輪の一方に対応するリアの最適な剛性配分であって、車両の横方向加速度、速度および静的ゲインに応じて定められる剛性の配分設定点を車輪の浮き上がりを防ぐ最大値で飽和させることによって得られるリアの最適な剛性配分に従って、リアアクスルに加えられる。
【0010】
もう1つの特徴によれば、フロントアクスルに作用する単アクスルアクティブアンチロールシステムの場合に、決定された全アンチロールトルクは、前後2つの内輪の一方に対応するリアの最適な剛性配分であって、車輪の浮き上がりを防ぐ剛性配分の最大値で飽和されたフロントの剛性の配分設定点から得られるリアの最適な剛性配分に従って、フロントアクスルに加えられる。
【0011】
本発明の第2の目的は、アンチロールバーの剛性に作用するアクチュエータを制御するECUを備えた車両用アクティブアンチロールシステムの制御装置において、
− 路面から内輪の浮き上がりを防ぐ最小荷重を、対象となる内輪が受けるように、車両の2つのアクスルに加えられる剛性の最大配分を計算する手段であって、入力部で車両の長手方向加速度と横方向加速度を受け取る手段と、
− アンチロールシステムのアクチュエータに加える全アンチロールトルク設定点を計算する手段と、
− 対象の前内輪または後内輪の浮き上がりを防止する手段であって、フロントまたはリアのアクティブアンチロールバーに配分される飽和トルクを計算する手段と、
を備えることを特徴とする制御装置である。
【0012】
車両用の両アクスルアクティブアンチロールシステムのための制御装置のもう1つの特徴によれば、アンチロールシステムのアクチュエータに加える全アンチロールトルク設定点を計算する手段が、車両のフロントおよびリアのアクスルに加えられる剛性の配分設定点も計算する。
【0013】
車両用の両アクスルアクティブアンチロールシステムのための制御装置のもう1つの特徴によれば、内輪の浮き上がりを防止する手段は、
− 前または後内輪の浮き上がり防止のために計算される最大配分によって、フロントとリアのアクスル間の剛性の配分設定点を飽和させる機能であって、出力部で荷重配分の上限と下限の間の飽和値を送出する機能と、
− 剛性の配分設定点のその飽和値にアンチロールトルク設定点を掛け合わせてトルク設定点を送出する乗算の機能であって、フロントアクスルへの剛性の飽和配分にアンチロールトルク設定点を掛け合わせてフロントトルク設定点を与える乗算と組み合わされた乗算の機能と、
をそれぞれ果たす。
【0014】
車両用の単アクスルアクティブアンチロールシステムのための制御装置のもう1つの特徴によれば、計算手段からの後内輪浮き上がり防止のための最大配分と、全アンチロールトルク設定点とを入力部で受け取る内輪の浮き上がり防止手段は、
− その全トルク設定点の絶対値を計算する機能と、
− その全トルク設定点の絶対値と、車両に特徴的であり、車両の開発時にマッピングによって確定されるフロントとリアのアクスル間の剛性の配分設定点の絶対値とを対応させる機能と、
− アンチロール剛性配分を飽和させる機能であって、最大配分値とマッピングによって得られる設定点値とを比較し、配分設定点が最大配分よりも小さいときは、リアアクスルに加える全トルク設定点の計算でその設定点を考慮に入れ、設定点が最大配分よりも大きいときは、設定点を最大配分で置き換えて全トルクを得る機能と、
− リアアクスルアクチュエータに送る全トルクを、荷重配分対トルク曲線の反転と、次いで全トルク設定点の符号に応じて行う±1の乗算とによって計算する機能と、
をそれぞれ果たす。
【0015】
車両用の両アクスルアクティブアンチロールシステムのための制御装置のもう1つの特徴によれば、リアアクスルにアンチロールシステムがある場合の前輪の浮き上がり防止では、飽和機能は、フロントの剛性の最大値を考慮に入れ、そこからリアの剛性の値を導き出して、それを全トルク設定点から得られる所望の配分設定点と比較する。
【0016】
本発明のその他の特徴および利点は、以下の図に示された本発明の2つの実施形態の説明を読むことで明らかになるであろう。
【0017】
本発明は、コーナリング時に内側になる車両の車輪のうちの1つの浮き上がりを防止するために、両アクスルアンチロールシステムの場合は、定義された配分に従って2つのアクスルそれぞれに加えるべき、または単アクスルシステムの場合は、2つのアクスルのうちの一方に加えるべき、最適な全アンチロールトルクを計算するものである。
【0018】
図1に示すように、車両用の両アクスルアンチロールシステムの制御装置の場合、装置は、センサによって測定されたものであれ、推定されたものであれ、車両の長手方向加速度γLと横方向加速度γTとを入力部で受け取る。
【0019】
車両の速度Vと、運転者によって与えられる力Ffに相当する制動要求とからオブザーバによって長手方向加速度を推定する場合、長手方向加速度γLは、力Ffを車両の最大重量Mmaxで割った商によって表される。すなわち、
【0020】
荷重移動を低めに評価するために、信号は低めに評価することが好ましい。
【0021】
オブザーバは、次のようにして加速度に関する誤差dをモデル化する。
【0022】
パラメータk1およびk2は、導出の迅速性とノイズ感度との間の折合いを図るものである。
【0023】
2つの車輪モデルによって横方向加速度を推定する場合、そのモデルはフロントアクスルの平均操舵角αと車両の速度Vを以下の方程式に当てはめて用いる。
【0024】
これらの方程式では、Mは車両の全重量、Vはその速度、
はそのヨー速度、Izはその重心を通る垂直軸の周りでのその慣性、L1およびL2は重心から前後それぞれの車軸までの距離、αはフロントアクスルの平均操舵角、D1およびD2はフロントおよびリアそれぞれのアクスルの偏流剛性(drift stiffness)、δは偏流角(drift angle)をそれぞれ示す。
【0025】
制御システムはとりわけ、ハンドル角α、ヨー速度
、車両の長手方向速度Vのような、アンチロール制御法則で利用される複数の信号をさらに受け取る。
【0026】
同システムは、路面から内輪の浮き上がりを防ぐ最小荷重であって、タイヤに加えられる垂直応力Fzである荷重が対象の内輪にかかるようにするために、車両の2つのアクスルに加えられる剛性の最大配分を計算する手段3を備える。Fzijは車軸jの車輪iに加えられる垂直応力であり、iとjは、1または2の整数である。
【0027】
フロントアクスルの車輪については、荷重は、横方向加速度γT、長手方向加速度γLおよび車両重量の関数として次式で表される。
【0028】
リアアクスルの2つの車輪については次のとおりである。
ただし、kav+kar=1である。
【0029】
本発明による方法は、車両の横および長手方向の加速度に応じて、コーナリング時の内輪の1つに最小荷重がかかるようにする、フロントアクスルとリアアクスルとの間の剛性配分を決定する。
【0030】
コーナリング時の内輪である車両後輪の場合、その荷重FZarintは最小荷重FZarintMin以上でなければならず、そのため、リアアクスルへのアンチロール剛性配分karは、以下のように定義される最大値karMax以下でなければならないことになる。
【0031】
横方向加速度γT、長手方向加速度γLおよびリアアクスルへの剛性配分karによって定義される車両の動作領域を表した図2に示されるように、γT=6m.s−2およびγL=2m.s−2で、karが0.6超のとき、コーナリング時の内輪である後輪は路面から浮き上がることがわかる。
【0032】
コーナリング時の内輪である車両前輪の場合は、その荷重FZavintが最小値FZavinMinを上回って、フロントアクスルkavへの剛性配分が以下のようにして定義される最大値kavMax以下となるようにしなければならない。
【0033】
図3は、横方向加速度γT、長手方向加速度γLおよびフロントアクスルへの剛性配分kavによって定義される車両の動作領域を示す。ここから、リアアクスルへの剛性配分karMax=1−kavMaxが導き出される。
【0034】
本方法は、こうしてフロントおよびリアの2つのアクスル間における荷重の最大配分を決定し、それとともに、手段4で、アンチロールシステムのアクチュエータに加える全アンチロールトルク設定点CARConsを計算する。両アクスルアンチロールシステムの場合、すなわち、2つのアクスルに作用するアクチュエータを備えるシステムの場合、本方法は、アンチロール制御法則に従って特に車両の横方向加速度γTおよび速度Vによって定義される運転状況に応じて車両の所望の静的応答を得るために2つのアクスルの間に加えるべき剛性の配分設定点karConsも計算する。
【0035】
そのため、手段4の出力部で、本方法は全アンチロールトルク設定点CARConsと所望のアンチロール荷重配分設定点karConsを送出する。フロントまたはリアの対象となる内輪の浮き上がり防止手段5において、本方法は、フロントまたはリアのアクティブアンチロールバーに配分される飽和トルクを計算する。このアンチロールトルクの飽和は、計算されたトルク値が実際に加えることができるようにするために必要なものである。実際、トルクの配分はアクティブアンチロールバーから行われるので、サスペンションスプリングも車両のロール剛性およびその配分に寄与する。k=0、すなわちリアのロール剛性がゼロの場合、またはk=1、すなわちフロントのロール剛性がゼロの場合にそれぞれ相当する配分に近い極値に到達することはできず、そのため、配分は、例えば0.1と0.9の間で飽和させる必要がある。
【0036】
内輪の浮き上がり防止手段5は、図4に示す以下の様々な機能を果たす。アンチロール剛性の配分を飽和させる機能6は、手段3で計算される後内輪浮き上がり防止のための最大配分karMax、または前内輪浮き上がり防止のためのkavMaxと、手段4で計算されるフロントとリアのアクスル間の剛性の配分設定点karConsとを入力部で受け取り、出力部で荷重配分karSatの上限と下限の2つの間の飽和値を送出する。車両の2つのアクスルの間のこの配分は、アンチロールトルク設定点CARConsと掛け合わされる乗算10によってフロントのトルク設定点CARVを与えるフロントアクスルへの剛性の飽和配分kavSatと、同じくアンチロールトルク設定点CARConsと掛け合わされることでリアアクスルに加えるトルク設定点CARRを与えるリアアクスルへの剛性の飽和配分karSatとをもたらす。
【0037】
単アクスルアンチロールシステムの場合、車両のアクティブアンチロール式の単一のアクスルにアクチュエータによって加えられる全トルクは、図5のブロック図に示すように計算され、2つのアクスルの間の剛性の配分はトルク設定点CARConsから導き出される。
【0038】
両アクスルアンチロールシステムの場合と同様、本方法は、同じ理由から、フロントまたはリアのアクティブアンチロールアクスルのアクチュエータに送る飽和トルクを計算する。前内輪または後内輪の浮き上がり防止手段5は、フロントの単アクスルアンチロール、またはリアの単アクスルアンチロールによって、図6または図7の線図に示された機能を果たす。
【0039】
リアの単アクスルアンチロールで、後内輪の浮き上がりを防止する場合(図6)、車輪の浮き上がり防止手段5は、後内輪の浮き上がりを防止するための最大配分karMaxを計算手段3から、全アンチロールトルク設定点CARConsを手段4からそれぞれ入力部で受け取る。この所望の全トルク設定点の絶対値7には、車両に特徴的であり、車両の開発時にマッピング8によって確定されるフロントとリアのアクスル間の剛性配分設定点karConの値が組み合わされる。アンチロールトルクがフロントで増大すると、リアへの荷重の分配が減少する。
【0040】
最大配分値karMaxとマッピングで得られる設定点karConsの値は、配分設定点の飽和機能6で比較される。配分設定点が最大配分よりも小さいときは、リアアクスルに加える全トルク設定点の計算でその設定点を考慮に入れる。反対に、設定点karConsが最大配分よりも大きいときは、設定点を最大配分で置き換えて全トルクを得る。
【0041】
リアアクスルのアクチュエータに送る全トルクの計算は、前出の荷重配分対トルク曲線を反転させ9、次いで全トルク設定点CARConsの符号に応じて±1を乗ずる10ことによって得られる。
【0042】
リアアクスルにアンチロールシステムがある場合の前輪の浮き上がりを防止する場合、飽和機能6は、手段3で計算されるフロントの剛性の最大値kavMaxを考慮に入れ、そこからリアの剛性の値を導き出し(karMax=1−kavMax)、それを全トルク設定点CARConsから得られる所望の配分設定点と比較する。
【0043】
図7は、車両のフロントアクスルのアンチロールシステムに相当する。この場合、加えるべき全トルク設定点をリアの荷重配分設定点と結び付けるマッピング8は、リアの単アクスルの場合と逆の特徴を示す。
【0044】
実際、フロントアクスルに加えられるトルクの増大はリアアクスルへの荷重の配分の減少をもたらす。前出の場合と同様、全トルク設定点CARConsから得られる所望の剛性の配分設定点karConsは、最大配分karMaxと比較され、その値よりも大きければ、その値で置き替えられる。
【0045】
したがって、この制御方法は、アクティブアンチロールシステムに作用することによって、コーナリング時の内輪の浮き上がりを遅らせるか、または防ぐことができるものであり、連続的に動作するという利点を有する。この方法は、当該技術からすれば運転状況によって変化するトルクまたは剛性配分の飽和に相当すると見なすことができる。
【図面の簡単な説明】
【0046】
【図1】車両の両アクスルアンチロール装置の制御システムのブロック図である。
【図2】横方向加速度γTと、長手方向加速度γLと、リアアクスルに対する剛性配分karとによって定義される車両の動作領域を示す。
【図3】横方向加速度γTと、長手方向加速度γLと、フロントアクスルに対する剛性配分karとによって定義される車両の動作領域を示す。
【図4】両アクスルアンチロールシステムの場合の前または後内輪の浮き上がり防止手段の詳細ブロック図である。
【図5】単アクスルアンチロール装置の制御システムのブロック図である。
【図6】フロントの単アクスルアンチロールシステムの場合の前または後内輪の浮き上がり防止手段の詳細ブロック図である。
【図7】リアの単アクスルアンチロールシステムの場合の前または後内輪の浮き上がり防止手段の詳細ブロック図である。
【特許請求の範囲】
【請求項1】
フロントおよびリアのアクスルのレベルでアンチロールバーの剛性に作用し、特に車両の横方向加速度に応じてECUによって制御されるアクチュエータを備える自動車両用アクティブアンチロールシステムの制御方法において、カーブで、フロントおよびリアのアクスルに加えるべき全アンチロールトルクを決定し、前記全アンチロールトルクが、コーナリング時の2つの内輪の一方にその浮き上がりを阻止する最小荷重がかかるように計算された2つのアクスル間の最適な剛性配分に由来するものであり、かつ、ハンドル操作時の車両の横方向加速度、速度および静的ゲインに応じて定められる所望の設定点に対応するものであることを特徴とする制御方法。
【請求項2】
カーブで前内輪または後内輪の浮き上がりを防止するために、前記前内輪または前記後内輪に最小荷重がかかるようにするフロントアクスルまたはリアアクスルへの剛性配分の最大値を車両の横および長手方向の加速度に応じて計算することを特徴とする、請求項1に記載の制御方法。
【請求項3】
両アクスルアクティブアンチロールシステムの場合に、決定された前記全アンチロールトルクが、前後2つの内輪の一方に対応する最適な剛性配分であって、車両の横方向加速度、速度および静的ゲインに応じて定められる剛性配分の設定点を、前記車輪の浮き上がりを防ぐ剛性配分の最大値で飽和させることよって得られる最適な剛性配分に従って、フロントおよびリアの2つのアクスル間に配分されることを特徴とする、請求項2に記載の制御方法。
【請求項4】
リアアクスルに作用する単アクスルアクティブアンチロールシステムの場合に、決定された前記全アンチロールトルクが、前後2つの内輪の一方に対応するリアの最適な剛性配分であって、車両の横方向加速度、速度および静的ゲインに応じて定められる配分設定点を、前記車輪の浮き上がりを防ぐ剛性配分の最大値で飽和させることによって得られるリアの最適な剛性配分に従ってリアアクスルに加えられることを特徴とする、請求項2に記載の制御方法。
【請求項5】
フロントアクスルに作用する単アクスルアクティブアンチロールシステムの場合に、決定された前記全アンチロールトルクが、前後2つの内輪の一方に対応するリアの最適な剛性配分であって、前記車輪の浮き上がりを防ぐ剛性配分の最大値で飽和させたフロントの配分設定点から得られるリアの最適な剛性配分に従ってフロントアクスルに加えられることを特徴とする、請求項2に記載の制御方法。
【請求項6】
アンチロールバーの剛性に作用するアクチュエータを制御するECUを備え、請求項1から5のいずれか一項に記載の方法によって制御される車両用アクティブアンチロールシステムの制御装置において、
路面から内輪の浮き上がりを防ぐ最小荷重を該内輪が受けるように、車両の2つのアクスルに加えられる剛性の最大配分を計算する手段(3)であって、入力部で車両の長手方向加速度(γL)と横方向加速度(γT)を受け取る手段(3)と、
アンチロールシステムのアクチュエータに加える全アンチロールトルク設定点(CARCons)を計算する手段(4)と、
当該の前内輪または後内輪の浮き上がりを防止する手段(5)であって、フロントまたはリアのアクティブアンチロールバーに配分される飽和トルクを計算する手段(5)と、
を備えることを特徴とする制御装置。
【請求項7】
アンチロールシステムのアクチュエータに加える前記全アンチロールトルク設定点(CARCons)を計算する前記手段(4)が、車両のフロントおよびリアのアクスルに加えられる前記剛性の配分設定点(karCons)も計算することを特徴とする、車両用の両アクスルアクティブアンチロールシステムのための請求項6に記載の制御装置。
【請求項8】
内輪の浮き上がりを防止する前記手段(5)が、
前または後内輪の浮き上がり防止のために前記手段(3)で計算される前記最大配分(kavMaxまたはkarMax)によって、前記手段(4)で計算されるフロントとリアのアクスル間の前記剛性の配分設定点(karCons)を飽和させる機能(6)であって、出力部で荷重配分の上限と下限の間の飽和値(karSat)を送出する機能(6)と、
前記剛性の配分設定点のその飽和値(karSat)に、前記手段(4)で計算される前記アンチロールトルク設定点(CARCons)を掛け合わせてトルク設定点(CARR)を送出する乗算の機能(10)であって、フロントアクスルへの前記剛性の飽和配分(kavSat)に前記アンチロールトルク設定点(CARCons)を掛け合わせてフロントトルク設定点(CARV)を与える乗算と組み合わされた乗算の機能(10)と、
をそれぞれ果たすことを特徴とする、車両用の両アクスルアクティブアンチロールシステムのための請求項6に記載の制御装置。
【請求項9】
前記計算手段(3)からの後内輪浮き上がり防止のための前記最大配分(karMax)と、前記手段(4)からの前記全アンチロールトルク設定点(CARCons)とを入力部で受け取る内輪の浮き上がり防止のための前記手段(5)が、
前記全トルク設定点(CARCons)の絶対値を計算する機能(7)と、
前記全トルク設定点(CARCons)の絶対値と、車両に特徴的であり、車両の開発時にマッピングによって確定されるフロントとリアのアクスル間の前記剛性の配分設定点(karCons)の絶対値とを対応させる機能(8)と、
アンチロール剛性配分を飽和させる機能(6)であって、前記最大配分値(karMax)とマッピングによって得られる前記設定点(karCons)値とを比較し、前記配分設定点が前記最大配分よりも小さいときは、リアアクスルに加える前記全トルク設定点の計算でその設定点を考慮に入れ、前記設定点(karCons)が前記最大配分よりも大きいときは、前記設定点を前記最大配分で置き換えて前記全トルクを得る機能(6)と、
リアアクスルのアクチュエータに送る前記全トルクを、荷重配分対トルク曲線の反転(9)と、次いで前記全トルク設定点(CARCons)の符号に応じて行う±1の乗算(10)とによって計算する機能と、
をそれぞれ果たすことを特徴とする、車両用の単アクスルアクティブアンチロールシステムのための請求項6に記載の制御装置。
【請求項10】
リアアクスルにアンチロールシステムがある場合の前輪の浮き上がりを防止する場合、前記飽和機能が、前記手段(3)で計算されるフロントの剛性の最大値(kavMax)を考慮に入れ、そこからリアの剛性の値を導き出して(karMax=1−kavMax)、それを前記全トルク設定点(CARCons)から得られる前記所望の配分設定点と比較することを特徴とする、請求項9に記載の制御装置。
【請求項1】
フロントおよびリアのアクスルのレベルでアンチロールバーの剛性に作用し、特に車両の横方向加速度に応じてECUによって制御されるアクチュエータを備える自動車両用アクティブアンチロールシステムの制御方法において、カーブで、フロントおよびリアのアクスルに加えるべき全アンチロールトルクを決定し、前記全アンチロールトルクが、コーナリング時の2つの内輪の一方にその浮き上がりを阻止する最小荷重がかかるように計算された2つのアクスル間の最適な剛性配分に由来するものであり、かつ、ハンドル操作時の車両の横方向加速度、速度および静的ゲインに応じて定められる所望の設定点に対応するものであることを特徴とする制御方法。
【請求項2】
カーブで前内輪または後内輪の浮き上がりを防止するために、前記前内輪または前記後内輪に最小荷重がかかるようにするフロントアクスルまたはリアアクスルへの剛性配分の最大値を車両の横および長手方向の加速度に応じて計算することを特徴とする、請求項1に記載の制御方法。
【請求項3】
両アクスルアクティブアンチロールシステムの場合に、決定された前記全アンチロールトルクが、前後2つの内輪の一方に対応する最適な剛性配分であって、車両の横方向加速度、速度および静的ゲインに応じて定められる剛性配分の設定点を、前記車輪の浮き上がりを防ぐ剛性配分の最大値で飽和させることよって得られる最適な剛性配分に従って、フロントおよびリアの2つのアクスル間に配分されることを特徴とする、請求項2に記載の制御方法。
【請求項4】
リアアクスルに作用する単アクスルアクティブアンチロールシステムの場合に、決定された前記全アンチロールトルクが、前後2つの内輪の一方に対応するリアの最適な剛性配分であって、車両の横方向加速度、速度および静的ゲインに応じて定められる配分設定点を、前記車輪の浮き上がりを防ぐ剛性配分の最大値で飽和させることによって得られるリアの最適な剛性配分に従ってリアアクスルに加えられることを特徴とする、請求項2に記載の制御方法。
【請求項5】
フロントアクスルに作用する単アクスルアクティブアンチロールシステムの場合に、決定された前記全アンチロールトルクが、前後2つの内輪の一方に対応するリアの最適な剛性配分であって、前記車輪の浮き上がりを防ぐ剛性配分の最大値で飽和させたフロントの配分設定点から得られるリアの最適な剛性配分に従ってフロントアクスルに加えられることを特徴とする、請求項2に記載の制御方法。
【請求項6】
アンチロールバーの剛性に作用するアクチュエータを制御するECUを備え、請求項1から5のいずれか一項に記載の方法によって制御される車両用アクティブアンチロールシステムの制御装置において、
路面から内輪の浮き上がりを防ぐ最小荷重を該内輪が受けるように、車両の2つのアクスルに加えられる剛性の最大配分を計算する手段(3)であって、入力部で車両の長手方向加速度(γL)と横方向加速度(γT)を受け取る手段(3)と、
アンチロールシステムのアクチュエータに加える全アンチロールトルク設定点(CARCons)を計算する手段(4)と、
当該の前内輪または後内輪の浮き上がりを防止する手段(5)であって、フロントまたはリアのアクティブアンチロールバーに配分される飽和トルクを計算する手段(5)と、
を備えることを特徴とする制御装置。
【請求項7】
アンチロールシステムのアクチュエータに加える前記全アンチロールトルク設定点(CARCons)を計算する前記手段(4)が、車両のフロントおよびリアのアクスルに加えられる前記剛性の配分設定点(karCons)も計算することを特徴とする、車両用の両アクスルアクティブアンチロールシステムのための請求項6に記載の制御装置。
【請求項8】
内輪の浮き上がりを防止する前記手段(5)が、
前または後内輪の浮き上がり防止のために前記手段(3)で計算される前記最大配分(kavMaxまたはkarMax)によって、前記手段(4)で計算されるフロントとリアのアクスル間の前記剛性の配分設定点(karCons)を飽和させる機能(6)であって、出力部で荷重配分の上限と下限の間の飽和値(karSat)を送出する機能(6)と、
前記剛性の配分設定点のその飽和値(karSat)に、前記手段(4)で計算される前記アンチロールトルク設定点(CARCons)を掛け合わせてトルク設定点(CARR)を送出する乗算の機能(10)であって、フロントアクスルへの前記剛性の飽和配分(kavSat)に前記アンチロールトルク設定点(CARCons)を掛け合わせてフロントトルク設定点(CARV)を与える乗算と組み合わされた乗算の機能(10)と、
をそれぞれ果たすことを特徴とする、車両用の両アクスルアクティブアンチロールシステムのための請求項6に記載の制御装置。
【請求項9】
前記計算手段(3)からの後内輪浮き上がり防止のための前記最大配分(karMax)と、前記手段(4)からの前記全アンチロールトルク設定点(CARCons)とを入力部で受け取る内輪の浮き上がり防止のための前記手段(5)が、
前記全トルク設定点(CARCons)の絶対値を計算する機能(7)と、
前記全トルク設定点(CARCons)の絶対値と、車両に特徴的であり、車両の開発時にマッピングによって確定されるフロントとリアのアクスル間の前記剛性の配分設定点(karCons)の絶対値とを対応させる機能(8)と、
アンチロール剛性配分を飽和させる機能(6)であって、前記最大配分値(karMax)とマッピングによって得られる前記設定点(karCons)値とを比較し、前記配分設定点が前記最大配分よりも小さいときは、リアアクスルに加える前記全トルク設定点の計算でその設定点を考慮に入れ、前記設定点(karCons)が前記最大配分よりも大きいときは、前記設定点を前記最大配分で置き換えて前記全トルクを得る機能(6)と、
リアアクスルのアクチュエータに送る前記全トルクを、荷重配分対トルク曲線の反転(9)と、次いで前記全トルク設定点(CARCons)の符号に応じて行う±1の乗算(10)とによって計算する機能と、
をそれぞれ果たすことを特徴とする、車両用の単アクスルアクティブアンチロールシステムのための請求項6に記載の制御装置。
【請求項10】
リアアクスルにアンチロールシステムがある場合の前輪の浮き上がりを防止する場合、前記飽和機能が、前記手段(3)で計算されるフロントの剛性の最大値(kavMax)を考慮に入れ、そこからリアの剛性の値を導き出して(karMax=1−kavMax)、それを前記全トルク設定点(CARCons)から得られる前記所望の配分設定点と比較することを特徴とする、請求項9に記載の制御装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2009−520635(P2009−520635A)
【公表日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願番号】特願2008−546542(P2008−546542)
【出願日】平成18年12月8日(2006.12.8)
【国際出願番号】PCT/FR2006/051316
【国際公開番号】WO2007/074258
【国際公開日】平成19年7月5日(2007.7.5)
【出願人】(503041797)ルノー・エス・アー・エス (286)
【Fターム(参考)】
【公表日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願日】平成18年12月8日(2006.12.8)
【国際出願番号】PCT/FR2006/051316
【国際公開番号】WO2007/074258
【国際公開日】平成19年7月5日(2007.7.5)
【出願人】(503041797)ルノー・エス・アー・エス (286)
【Fターム(参考)】
[ Back to top ]