
車両の並走経路報知装置および並走経路報知システム

【課題】例えば通勤時などに所定区間を並走する他の車両のような互いに自車の位置を通知し合わない車両についても、その車両の動きを予測すること。
【解決手段】周囲を走行する車両2,3と自車である車両1とが並走した区間を記憶しておき、その車両2,3と遭遇した際にその記憶した並走区間を読み出して報知する。このことにより、例えば通勤時などに所定区間を並走する他の車両2,3のような互いに自車の位置を通知し合わない車両についても、その車両の動きを予測することができる。
【解決手段】周囲を走行する車両2,3と自車である車両1とが並走した区間を記憶しておき、その車両2,3と遭遇した際にその記憶した並走区間を読み出して報知する。このことにより、例えば通勤時などに所定区間を並走する他の車両2,3のような互いに自車の位置を通知し合わない車両についても、その車両の動きを予測することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば通勤時などに所定区間を並走する他の車両のような互いに自車の位置を通知し合わない車両についても、その車両の動きを予測する技術に関する。
【背景技術】
【0002】
自動車の走行に伴って移動していく現在位置をモニタ上に道路地図と共に表示したり、現在地から目的地までの適切な経路を設定し、経路案内を行うナビゲーション装置が知られており、より円滑なドライブに寄与している。
【0003】
このようなナビゲーション装置の中には、任意の隣接車両が離れ過ぎたことを目視によらずに認識できるようにし、かつ、離れ過ぎても確実に待合せを可能とするナビゲーション装置がある(例えば、特許文献1参照。)。
【0004】
具体的には、このようなナビゲーション装置は、例えば数台の車両が共通の目的地に向かって走行するいわゆるツーリングを行う場合などに、互いに自車の位置を通知するとともに、任意の隣接二車間の距離が設定距離以上になったか監視し、設定距離以上になれば警報を出力し、待合せポイントが設定された時、該待合せポイントを他の車両のナビゲーション装置に通知し、各車両のナビゲーション装置は待合せポイントに自車を誘導するように構成されている。
【特許文献1】特開2001−108460号公報(第3頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、通勤等では、特定の道路区間を決まった時刻に繰り返し走行するため、同様の走行をしている他車と、同じような場所で出くわし一定区間を併走した後で分岐するような動きをすることが多い。
【0006】
ドライバによっては、日々の運転の中で他車のナンバープレート情報や車体形状あるいは車体色等の車両を特定する情報と、その車両がどの地点まで自車と共に併走するかを記憶しており、たとえば先行車の走行速度が遅い場合であってもすぐに分岐することが分かっている車両に対しては無理な追い越しをする事なくあえて追従走行する、あるいはいつも他車が曲がる交差点付近ではウインカー出し忘れや急ブレーキなどに備えて車間距離を多くとる等を行って事故発生の可能性を下げる等の判断を行いながら運転を行っている。
【0007】
但し、これはドライバの記憶力が特に優れる場合においてであり、大抵のドライバは、例えば以前に見かけた車両であることはわかっても、どの地点まで共に走行するのかまでは曖昧で覚えていない等の曖昧な記憶しか保持できず、成り行きで運転を行ってしまう事が多い。
【0008】
しかし、上述のようなナビゲーション装置においては、例えばツーリングを行う既知の間柄であるユーザ同士が自車の位置を通知し合うことを前提としており、例えば通勤時などに所定区間を並走する他の車両のような互いに自車の位置を通知し合わない車両については、その車両の動きを予測することが困難であるという問題があった。
【0009】
本発明は、このような不具合に鑑みなされたものであり、その目的とするところは、例えば通勤時などに所定区間を並走する他の車両のような互いに自車の位置を通知し合わない車両についても、その車両の動きを予測する技術を提供することにある。
【課題を解決するための手段】
【0010】
上記課題を解決するためになされた請求項1に係る車両の並走経路報知装置は、「周囲を走行する車両と自車とが並走した区間を記憶しておき、その車両と遭遇した際にその記憶した並走区間を読み出して報知すること」を特徴とする。
【0011】
具体的には、車両特定情報取得手段(29:この欄においては、発明に対する理解を容易にするため、必要に応じて「発明を実施するための最良の形態」欄で用いた符号を付すが、この符号によって請求の範囲を限定することを意味するものではない。)が、車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能であり、経路情報取得手段(29)が、他の車両が車両の周囲を走行した経路に関する経路情報を取得可能である。また、記憶手段(31)が、車両特定情報および経路情報を関連付けて記憶可能である。
【0012】
判断手段(29)が、記憶手段が記憶する車両特定情報を参照して、車両特定情報取得手段によって取得された車両特定情報と記憶手段が記憶する車両特定情報とが同一であるか否かを判断する。車両特定情報取得手段によって取得された車両特定情報と記憶手段が記憶する車両特定情報とが判断手段によって同一ではないと判断された場合には、記憶制御手段(29)が、車両特定情報取得手段によって取得された車両特定情報を記憶手段に記憶させるとともに、経路情報取得手段によって取得された経路情報をその記憶させた車両特定情報と関連付けて記憶手段に記憶させる。一方、車両特定情報取得手段によって取得された車両特定情報と記憶手段が記憶する前記車両特定情報とが判断手段によって同一であると判断された場合には、記憶制御手段が、その同一であると判断された車両特定情報と経路情報取得手段によって取得された経路情報とを関連付けて記憶手段に記憶させる。さらに、上述のように前記車両特定情報取得手段によって取得された車両特定情報と記憶手段が記憶する前記車両特定情報とが同一であると判断手段によって判断された場合には、報知制御手段(29)が、その車両特定情報に関連付けられた経路情報を記憶手段から読み出し、その読み出した経路情報を報知手段(26)に報知させる。
【0013】
このように構成された本発明によれば、周囲を走行する車両と自車とが並走した区間を記憶しておき、その車両と遭遇した際にその記憶した並走区間を読み出して報知する。このことにより、例えば通勤時などに所定区間を並走する他の車両のような互いに自車の位置を通知し合わない車両についても、その車両の動きを予測することができる。
【0014】
この場合、上述の車両特定情報取得手段については、車両の周囲の画像を取得し、その取得した画像から前記車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能であることが考えられる(請求項2)。具体的には、車両特定情報取得手段が、車両の周囲の画像を取得し、その取得した画像から車両の周囲を走行する他の車両のナンバープレートの画像を抽出し、その抽出したナンバープレートの画像からその車両を特定するための車両特定情報を取得可能であるといった具合である(請求項3)。また。車両特定情報取得手段が、車両の周囲の画像を取得し、その取得した画像から車両の周囲を走行する他の車両の輪郭を抽出し、その抽出した輪郭からその車両を特定するための車両特定情報を取得可能であるといった具合である。また、車両特定情報取得手段が、車両の周囲の画像を取得し、その取得した画像から、例えば車体の形状、色、あるいは車体に印刷されたマークや文字情報等を抽出し、その抽出した情報からその車両を特定するための車両特定情報を取得するといった具合である。
【0015】
また、上述の車両特定情報取得手段については、車両の周囲のうち車両の前方の画像を取得するよう構成されていることが考えられる(請求項4)。また、車両特定情報取得手段については、車両の周囲のうち車両の後方の画像を取得するよう構成されていることが考えられる(請求項5)。
【0016】
ところで、例えば並走する車両が買い物などのためにコンビニエンスストアなどへ寄った場合には、その車両と並走すべき経路すべてを並走したこととならず、その際に取得した経路情報の信頼性が劣る場合がある。このような場合、利用者に報知する経路情報の信頼性も劣ることとなる。
【0017】
そこで、複数の経路情報から他の車両が並走する可能性がある経路を推測することが考えられる。具体的には、請求項6のように、車両特定情報取得手段によって取得された車両特定情報と記憶手段が記憶する車両特定情報とが判断手段によって同一であると判断された場合に、その車両特定情報に関連付けられた経路情報を記憶手段から読み出した際に、その車両特定情報に関連付けられた経路情報が複数存在するときには、報知制御手段が、その複数の経路情報から他の車両が並走する可能性がある経路を推測し、その推測した経路を経路情報として報知手段に報知させることが考えられる。
【0018】
このように構成すれば、利用者に報知する経路情報の信頼性を高めることができる。
ところで、自車が走行する全ての道路区間にて上述の車両特定情報を取得した場合には、そのデータ量が多くなり、車両特定情報を記憶するための記憶容量が大きくなるおそれがある。
【0019】
そこで、上述の車両特定情報を特定の道路区間でのみ取得することが考えられる。具体的には、請求項7のように、特定の道路区間を設定する道路区間設定手段を備え、車両特定情報取得手段が、道路区間設定手段によって設定された道路区間でのみ、車両の周囲を走行する他の車両を特定するための車両特定情報を取得することが考えられる。なお、上述の道路区間設定手段については、特定の道路区間を手動で設定するように校正してもよいし、日常的に繰り返し走行する道路に関してのみ、自動的に範囲を設定するようにしてもよい。一例を挙げると、例えば自車の走行履歴情報(走行日時と自車位置情報)を内部に記憶しておき、単位期間内に走行回数が特定回数を超えた場合、日常的な繰り返し走行する道路(例えば通勤)と自動的に認識する方法が考えられる。
【0020】
このように構成すれば、自車が走行する全ての道路区間にて上述の車両特定情報を取得した場合に較べて、車両特定情報を記憶するための記憶容量を小さくすることができる。
ところで、上記課題を解決するためになされた請求項8に係る並走経路報知システムは、「周囲を走行する車両と自車とが並走した区間を情報センタに送信して記憶しておき、その車両と遭遇した際にその記憶した並走区間を情報センタから受信して報知すること」を特徴とする。
【0021】
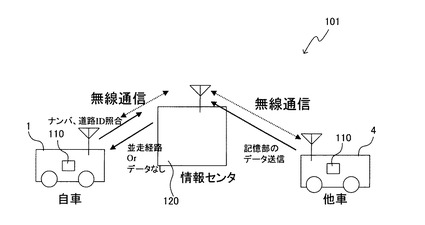
具体的には、上述の並走経路報知システム(101)は、車両の周囲を走行する他の車両が以前並走したことがある車両である場合には並走した経路を報知する並走経路報知装置(110)と、情報センタ(120)と、を備え、並走経路報知装置と情報センタと通信網を介して通信可能に構成されている。
【0022】
このうち並走経路報知装置においては、車両特定情報取得手段が、車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能であり、経路情報取得手段が、他の車両が車両の周囲を走行した経路に関する経路情報を取得可能であり、装置側送受信手段が、情報センタとの間で各種データを送受信可能である。そして、装置側送信制御手段が、装置側送受信手段を介して車両特定情報および経路情報を前記情報センタへ送信させる。
【0023】
一方、情報センタにおいては、センタ側送受信手段(120)が、並走経路報知装置との間で各種データを送受信可能であり、記憶手段(120)が、センタ側送受信手段が受信した車両特定情報および経路情報を関連付けて記憶可能である。そして、判断手段(120)が、記憶手段が記憶する車両特定情報を参照して、センタ側送受信手段が受信した車両特定情報と記憶手段が記憶する車両特定情報とが同一であるか否かを判断する。センタ側送受信手段が受信した車両特定情報と記憶手段が記憶する車両特定情報とが判断手段によって同一ではないと判断された場合には、記憶制御手段(120)が、センタ側送受信手段が受信した車両特定情報を記憶手段に記憶させるとともに、センタ側送受信手段が受信した経路情報をその記憶させた車両特定情報と関連付けて記憶手段に記憶させる。一方、センタ側送受信手段が受信した車両特定情報と記憶手段が記憶する車両特定情報とが判断手段によって同一であると判断された場合には、記憶制御手段が、その同一であると判断された車両特定情報とセンタ側送受信手段が受信した経路情報とを関連付けて記憶手段に記憶させる。
【0024】
さらに、上述のようにセンタ側送受信手段が受信した車両特定情報と記憶手段が記憶する車両特定情報とが同一であると判断手段によって判断された場合には、センタ側送信制御手段(120)が、その車両特定情報に関連付けられた経路情報を記憶手段から読み出し、センタ側送受信手段を制御してその読み出した経路情報を並走経路報知装置へと送信させる。
【0025】
また、並走経路報知装置においては、装置側送受信手段が受信した経路情報を報知制御手段が報知手段に報知させる。
このように構成された本発明によれば、自車だけでなく複数の車両からの情報を情報センタに蓄積することができるので、自車が並走していない車両であっても、自車と並走する可能性がある車両についてもその動きを予測することができる。
【0026】
この場合、上述の車両特定情報取得手段については、車両の周囲の画像を取得し、その取得した画像から前記車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能であることが考えられる(請求項9)。具体的には、車両特定情報取得手段が、車両の周囲の画像を取得し、その取得した画像から車両の周囲を走行する他の車両のナンバープレートの画像を抽出し、その抽出したナンバープレートの画像からその車両を特定するための車両特定情報を取得可能であるといった具合である(請求項10)。また。車両特定情報取得手段が、車両の周囲の画像を取得し、その取得した画像から車両の周囲を走行する他の車両の輪郭を抽出し、その抽出した輪郭からその車両を特定するための車両特定情報を取得可能であるといった具合である。また、車両特定情報取得手段が、車両の周囲の画像を取得し、その取得した画像から、例えば車体の形状、色、あるいは車体に印刷されたマークや文字情報等を抽出し、その抽出した情報からその車両を特定するための車両特定情報を取得するといった具合である。
【0027】
また、上述の車両特定情報取得手段については、車両の周囲のうち車両の前方の画像を取得するよう構成されていることが考えられる(請求項11)。また、車両特定情報取得手段については、車両の周囲のうち車両の後方の画像を取得するよう構成されていることが考えられる(請求項12)。
【0028】
ところで、例えば並走する車両が買い物などのためにコンビニエンスストアなどへ寄った場合には、その車両と並走すべき経路すべてを並走したこととならず、その際に取得した経路情報の信頼性が劣る場合がある。このような場合、利用者に報知する経路情報の信頼性も劣ることとなる。
【0029】
そこで、複数の経路情報から他の車両が並走する可能性がある経路を推測することが考えられる。具体的には、請求項13のように、センタ側送受信手段が受信した車両特定情報と記憶手段が記憶する車両特定情報とが判断手段によって同一であると判断された場合に、その車両特定情報に関連付けられた経路情報を記憶手段から読み出した際に、その車両特定情報に関連付けられた経路情報が複数存在するときには、送信制御手段が、その複数の経路情報から他の車両が並走する可能性がある経路を推測し、センタ側送受信手段を制御してその推測した経路を経路情報として並走経路報知装置へと送信させることが考えられる。
【0030】
このようにすれば、利用者に報知する経路情報の信頼性を高めることができる。
ところで、自車が走行する全ての道路区間にて上述の車両特定情報を取得した場合には、そのデータ量が多くなり、車両特定情報を記憶するための記憶容量が大きくなるおそれがある。
【0031】
そこで、上述の車両特定情報を特定の道路区間でのみ取得することが考えられる。具体的には、請求項14のように、特定の道路区間を設定する道路区間設定手段を備え、車両特定情報取得手段が、道路区間設定手段によって設定された道路区間でのみ、車両の周囲を走行する他の車両を特定するための車両特定情報を取得することが考えられる。なお、上述の道路区間設定手段については、特定の道路区間を手動で設定するように校正してもよいし、日常的に繰り返し走行する道路に関してのみ、自動的に範囲を設定するようにしてもよい。一例を挙げると、例えば自車の走行履歴情報(走行日時と自車位置情報)を内部に記憶しておき、単位期間内に走行回数が特定回数を超えた場合、日常的な繰り返し走行する道路(例えば通勤)と自動的に認識する方法が考えられる。
【0032】
このように構成すれば、自車が走行する全ての道路区間にて上述の車両特定情報を取得した場合に較べて、車両特定情報を記憶するための記憶容量を小さくすることができる。
【発明を実施するための最良の形態】
【0033】
以下に本発明の実施形態を図面とともに説明する。
[第一実施形態]
図1は並走経路報知装置10の構成を示すブロック図である。また、図2はナビゲーション装置20の概略構成を示すブロック図である。
【0034】
[並走経路報知装置10の構成の説明]
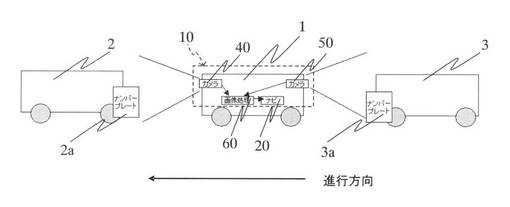
図1に示すように、車両1には、並走経路報知装置10が取り付けられている。この並走経路報知装置10は、ナビゲーション装置20と、前方カメラ40と、後方カメラ50と、画像処理装置60と、を備える。なお、上述の前方カメラ40および後方カメラ50は画像処理装置60に接続され、取得した画像データを画像処理装置60へ送信可能に構成されている。また、画像処理装置60は、ナビゲーション装置20に接続され、画像処理後のデータをナビゲーション装置20へ送信可能に構成されている。
【0035】
[ナビゲーション装置20の構成の説明]
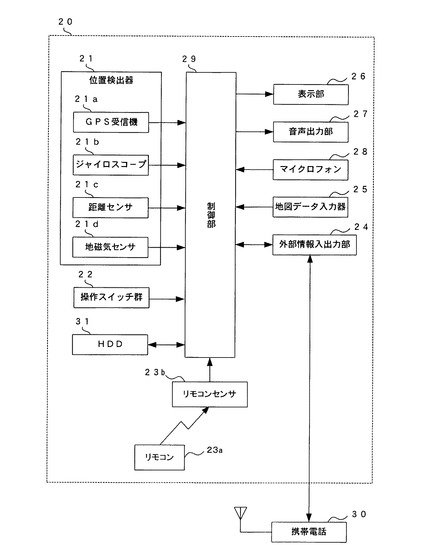
図2に示すように、ナビゲーション装置20は車両に搭載され、車両の現在位置を検出する位置検出器21と、ユーザからの各種指示を入力するための操作スイッチ群22と、操作スイッチ群22と同様に各種指示を入力可能であってナビゲーション装置20とは別体となったリモートコントロール端末(以下、リモコンと称す)23aと、リモコン23aからの信号を入力するリモコンセンサ23bと、ナビゲーション装置20とは別の装置から情報を入力したり別の装置に情報を出力したりすることが可能な外部情報入出力部24と、地図データや各種の情報を記録した地図記憶媒体から地図データ等を入力する地図データ入力器25と、各種データを記憶するためのHDD31と、地図や各種情報の表示を行うための表示部26と、各種のガイド音声等を出力するための音声出力部27と、上述した位置検出器21、操作スイッチ群22、リモコンセンサ23b、外部情報入出力部24、地図データ入力器25からの入力に応じて各種処理を実行し、外部情報入出力部24、表示部26、音声出力部27を制御する制御部29とを備えている。
【0036】
位置検出器21は、GPS(Global Positioning System)用の人工衛星からの送信電波をGPSアンテナを介して受信し、車両の位置、方位、速度等を検出するGPS受信機21aと、車両に加えられる回転運動の大きさを検出するジャイロスコープ21bと、車両の前後方向の加速度等から走行した距離を検出するための距離センサ21cと、地磁気から進行方位を検出するための地磁気センサ21dとを備えている。そして、これら各センサ等21a〜21dは、各々が性質の異なる誤差を有しているため、互いに補完しながら使用するように構成されている。
【0037】
操作スイッチ群22は、表示部26の表示面と一体に構成されたタッチパネル及び表示部26の周囲に設けられたメカニカルなキースイッチ等から構成される。尚、タッチパネルと表示部26とは積層一体化されており、タッチパネルには、感圧方式、電磁誘導方式、静電容量方式、あるいはこれらを組み合わせた方式など各種の方式があるが、その何れを用いてもよい。
【0038】
外部情報入出力部24は、他の外部機器等に接続され、それらの機器との間で情報を入出力する機能を担う。なお、この外部機器の一つとして携帯電話30と接続されている。このことにより、外部情報入出力部24は携帯電話30を介して外部とデータ通信可能である。
【0039】
地図データ入力器25は、図示しない地図記憶媒体に記憶された各種データを入力するための装置である。地図記憶媒体には、地図データ(道路データ、地形データ、マークデータ、交差点データ、施設のデータ等)、案内用の音声データ、音声認識データ等が記憶されている。このようなデータを記憶する地図記憶媒体の種類としては、そのデータ量からCD−ROMやDVDを用いるのが一般的であるが、ハードディスクなどの磁気記憶装置やメモリカード等の媒体を用いても良い。
【0040】
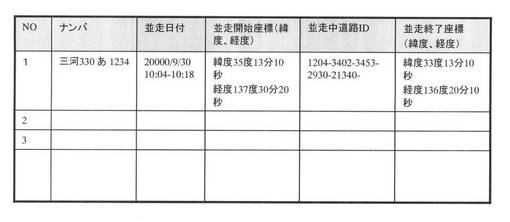
HDD31は、不揮発性メモリで構成され、各種データを記憶するのに利用される。また、HDD31は、車両特定情報および経路情報を関連付けた「並走車両情報」を記憶するのに利用される(図5参照)。ここで、「車両特定情報」とは、自車と並走したことがある並走車両を特定するための情報を云い、例えばその車両のナンバーなどが挙げられる(図5参照)。また、経路情報とは、上述の並走車両が自車と並走した経路を示す情報を云い、並走した日時、並走を開始した地点を示す情報、並走した道路の道路ID情報および並走を終了した地点を示す情報から構成される(図5参照)。
【0041】
なお、HDD31は記憶手段に該当する。
表示部26は、カラー表示装置であり、液晶ディスプレイ、有機ELディスプレイ、CRTなどがあるが、その何れを用いてもよい。表示部26の表示画面には、位置検出器21にて検出した車両の現在位置と地図データ入力器25より入力された地図データとから特定した現在地を示すマーク、目的地までの誘導経路、名称、目印、各種施設のマーク等の付加データとを重ねて表示することができる(図6(a)参照)。また、施設のガイド等も表示できる。なお、表示部26は報知手段に該当する。
【0042】
音声出力部27は、地図データ入力器25より入力した施設のガイドや各種案内の音声を出力することができる。
マイクロフォン28は、利用者が音声を入力(発話)するとその入力した音声に基づく電気信号(音声信号)を制御部29に出力するものである。利用者はこのマイクロフォン28に様々な音声を入力することにより、ナビゲーション装置20を操作することができる。
【0043】
制御部29は、CPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインなどからなる周知のマイクロコンピュータを中心に構成されており、ROM及びRAMに記憶されたプログラムに基づいて各種処理を実行する。例えば、位置検出器21からの各検出信号に基づき座標及び進行方向の組として車両の現在位置を算出し、地図データ入力器25を介して読み込んだ現在位置付近の地図等を表示部26に表示する表示処理や、地図データ入力器25に格納された地点データと、操作スイッチ群22やリモコン23a等の操作に従って設定された目的地とに基づいて、現在位置から目的地までの最適な経路を算出し、その算出した経路を案内する経路案内処理を行う。また、制御部29は後述する送信処理や受信処理で用いた各種データを記憶保持することができるようになっている。
【0044】
なお、制御部29は車両特定情報取得手段、経路情報取得手段、判断手段、記憶制御手段および報知制御手段に該当する。
[前方カメラ40の構成の説明]
前方カメラ40は、CCDカメラである。また、前方カメラ40は、車両1の前部に取り付けられており、車両1の前方を走行する車両2のナンバープレート2aを含む車両1の前方の状況を撮影することができる。
【0045】
[後方カメラ50の構成の説明]
後方カメラ50は、CCDカメラである。また、後方カメラ50は、車両1の後部に取り付けられており、車両1の後方を走行する車両3のナンバープレート3aを含む車両1の後方の状況を撮影することができる。
【0046】
[画像処理装置60の構成の説明]
画像処理装置60は、CPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインなどからなる周知のマイクロコンピュータを中心に構成されており、ROM及びRAMに記憶されたプログラムに基づいて各種処理を実行する。この画像処理装置60は、前方カメラ40および後方カメラ50から取得した画像データを画像処理し、その画像処理した画像データをナビゲーション装置20へ送信する機能を有する。
【0047】
[並走車両情報記憶処理の説明]
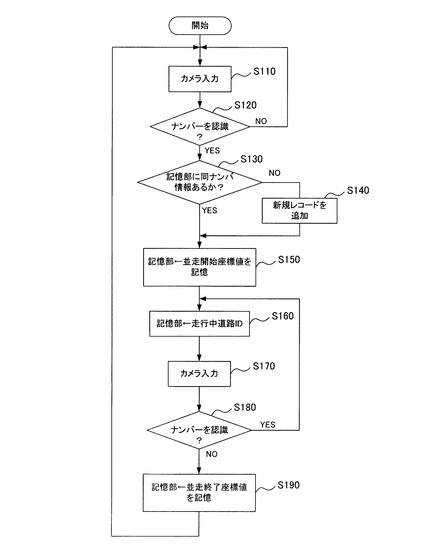
次に、並走経路報知装置10のナビゲーション装置20の制御部29が実行する並走車両情報記憶処理について図3のフローチャートおよび図5を参照して説明する。なお、図5は並走車両情報のデータ構造を説明するための説明図である。
【0048】
この並走車両情報記憶処理は、運転者によってイグニッションキーが操作されてアクセサリー給電(ACC)の状態になり、並走経路報知装置10が起動している際に実行される。
【0049】
まず、前方カメラ40および後方カメラ50が、カメラ前方の様子を画像として入力する(S110)。次に、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できるか否かを判断する(S120)。具体的には、画像処理装置60が、前方カメラ40および後方カメラ50が入力した画像を取得し、その取得した画像に車両のナンバープレートが含まれているか否かを判断する。前方カメラ40および後方カメラ50が入力した画像に車両のナンバープレートが含まれていないと判断された場合には(S120:NO)、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できないとしてS110に戻る。
【0050】
一方、前方カメラ40および後方カメラ50が入力した画像に車両のナンバープレートが含まれていると判断された場合には(S120:YES)、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できたとして、その認識できたナンバープレートに関する情報と同一の情報がHDD31に記憶されているか否かを判断する(S130)。認識できたナンバープレートに関する情報と同一の情報がHDD31に記憶されていないと判断された場合には(S130:NO)、認識できたナンバープレートに関する情報を新規レコードとしてHDD31に追加するとともに(S140)、現在位置に関する情報を並走開始地点としてHDD31の追加した新規レコードへ記憶する(S150)。一方、認識できたナンバープレートに関する情報と同一の情報がHDD31に記憶されていると判断された場合には(S130:YES)、現在位置に関する情報を並走開始地点としてHDD31の既存のレコードへ記憶する(S150)。
【0051】
続いて、自車が走行中の道路IDをHDD31へ記憶する(S160)。そして、上述のS110と同様に、前方カメラ40および後方カメラ50が、カメラ前方の様子を画像として入力し(S170)、上述のS120と同様に前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できるか否かを判断する(S180)。前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できた場合には(S180:YES)、S160に戻る。
【0052】
一方、例えば、先行車である車両2が右左折等によって自車の前から居なくなると、前方カメラ40が前車を捉えなくなり、画像処理装置60から車両2のナンバープレート2aの画像がナビゲーション装置20に伝達されなくなるといった具合に、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できない場合には(S180:NO)、現在位置に関する情報を並走開始地点としてHDD31へ記憶する(S190)。そしてS110に戻る。
【0053】
[並走車両情報報知処理の説明]
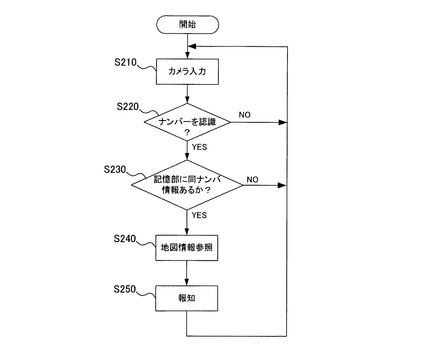
次に、並走経路報知装置10のナビゲーション装置20の制御部29が実行する並走車両情報報知処理について図4のフローチャートおよび図6(b)を参照して説明する。なお、図6(b)は表示部に表示される画面例(2)である。
【0054】
この並走車両情報報知処理は、運転者によってイグニッションキーが操作されてアクセサリー給電(ACC)の状態になり、並走経路報知装置10が起動している際に繰り返し実行される。
【0055】
まず、前方カメラ40および後方カメラ50が、カメラ前方の様子を画像として入力する(S210)。次に、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できるか否かを判断する(S220)。具体的には、画像処理装置60が、前方カメラ40および後方カメラ50が入力した画像を取得し、その取得した画像に車両のナンバープレートが含まれているか否かを判断する。前方カメラ40および後方カメラ50が入力した画像に車両のナンバープレートが含まれていないと判断された場合には(S220:NO)、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できないとしてS210に戻る。
【0056】
一方、前方カメラ40および後方カメラ50が入力した画像に車両のナンバープレートが含まれていると判断された場合には(S220:YES)、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できたとして、その認識できたナンバープレートに関する情報と同一の情報がHDD31に記憶されているか否かを判断する(S230)。認識できたナンバープレートに関する情報と同一の情報がHDD31に記憶されていないと判断された場合には(S230:NO)、S210に戻る。一方、認識できたナンバープレートに関する情報と同一の情報がHDD31に記憶されていると判断された場合には(S230:YES)、現在位置を中心とする地図情報を参照し(S340)、認識できたナンバープレートに関する情報と同一の情報に含まれる経路情報を、その参照した地図情報とともに表示部26に表示させる(S250、図6(b)参照)。そして、S210に戻る。
【0057】
[並走車両情報記憶処理および並走車両情報報知処理の適用例の説明]
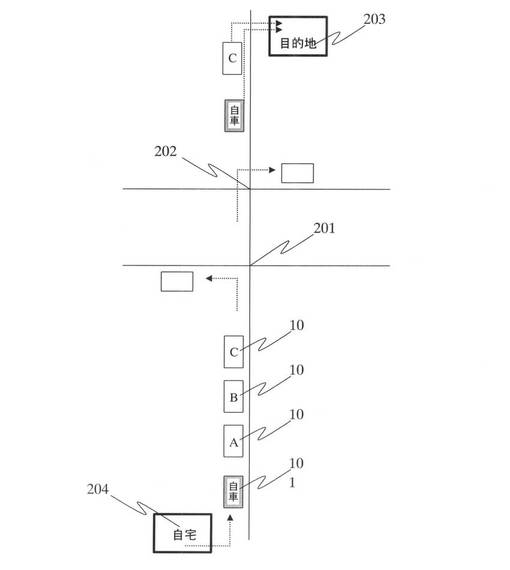
次に、上述の並走車両情報記憶処理および並走車両情報報知処理の適用例について、図9を参照して説明する。図9に例示するように、例えば、自宅204から自車100が道路へと移動した際に、先行車として車両102,103,104が走行していたとする。これら車両102,103,104は、過去に並走したことがあるものとし、先行車A(車両102)は交差点201で左折して自車100と別れ、先行車B(車両103)は交差点202で右折して自車と別れ、先行車C(車両104)は自車100と同じ目的地203まで走行した場合には、上述の並走車両情報記憶処理によって、上述の自車100と車両102,103,104との並走経路を示す経路情報がナビゲーション装置20に記憶される。
【0058】
まず、最初の先行車が先行車A(車両102)であるため、前方カメラ40によって先行車A(車両102)のナンバープレート2aを撮影し、その撮影した画像を画像処理装置60に送信する。画像処理装置60ではこの画像を画像処理してナビゲーション装置20へ送信する。ナビゲーション装置20では、先行車A(車両102)のナンバープレート情報がHDD31に格納されていることを確認すると、先行車A(車両102)が前回追従走行した際には交差点201で左折した旨をドライバに案内する。
【0059】
さらに、交差点201を通過すると、先行車は先行車B(車両103)であるため、前方カメラ40によって先行車B(車両103)のナンバープレート2aを撮影し、その撮影した画像を画像処理装置60に送信する。画像処理装置60ではこの画像を画像処理してナビゲーション装置20へ送信する。ナビゲーション装置20では、先行車B(車両103)のナンバープレート情報がHDD31に格納されていることを確認すると、先行車B(車両103)が前回追従走行した際には交差点202で左折した旨をドライバに案内する。
【0060】
そして、交差点202を通過すると、先行車は先行車C(車両104)であるため、前方カメラ40によって先行車C(車両104)のナンバープレート2aを撮影し、その撮影した画像を画像処理装置60に送信する。画像処理装置60ではこの画像を画像処理してナビゲーション装置20へ送信する。ナビゲーション装置20では、先行車C(車両104)のナンバープレート情報がHDD31に格納されていることを確認すると、先行車C(車両104)が前回追従走行した場合には同一の目的地302まで一緒に走行した事を案内する。
【0061】
以上によって、ドライバはあらかじめ先行車がどのポイントでどのような動きをするのかをあらかじめ把握できるため、運転に余裕をもって対処することが可能となる。
[第一実施形態の効果]
このように第一実施形態の並走経路報知装置10によれば、周囲を走行する車両2,3と自車である車両1とが並走した区間を記憶しておき、その車両2,3と遭遇した際にその記憶した並走区間を読み出して報知する。このことにより、例えば通勤時などに所定区間を並走する他の車両2,3のような互いに自車の位置を通知し合わない車両についても、その車両の動きを予測することができる。
[第二実施形態]
上記第一実施形態の並走経路報知装置10は、周囲を走行する車両2,3と自車両1とが並走した区間を記憶しておき、その車両2,3と遭遇した際にその記憶した並走区間を読み出して報知するよう構成されている。
【0062】
これに対して、第二実施形態の並走経路報知システムは、並走経路報知装置110および情報センタ120から構成されている。
[並走経路報知装置110の構成の説明]
図7に示すように、車両1や他車4には、並走経路報知装置110がそれぞれ取り付けられている。この並走経路報知装置110は、ナビゲーション装置20と、前方カメラ40と、後方カメラ50と、画像処理装置60と、を備える。
【0063】
なお、上述の前方カメラ40および後方カメラ50は画像処理装置60に接続され、取得した画像データを画像処理装置60へ送信可能に構成されている。また、画像処理装置60は、ナビゲーション装置20に接続され、画像処理後のデータをナビゲーション装置20へ送信可能に構成されている。
【0064】
なお、ナビゲーション装置20、前方カメラ40、後方カメラ50および画像処理装置60については、第一実施形態の並走経路報知装置10が備える各構成と共通なので、ここでは同じ符号を使用してその詳細な説明は省略する。
【0065】
なお、外部情報入出力部24は、装置側送受信手段に該当する。また、表示部26は報知手段に該当する。なお、制御部29は、車両特定情報取得手段、経路情報取得手段、装置側送信制御手段および報知制御手段に該当する。また、HDD31は記憶手段に該当する。
【0066】
[情報センタ120の構成の説明]
情報センタ120は、CPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインなどからなる周知のマイクロコンピュータを中心に構成されており、ROM及びRAMに記憶されたプログラムに基づいて各種処理を実行する。また、情報センタ120は、図示しない通信I/Fを備えており、この通信I/Fを介して外部と通信可能である。なお、情報センタ120は、記憶手段、記憶制御手段、判断手段、センタ側送受信手段およびセンタ側送信制御手段に該当する。
【0067】
[並走車両情報報知処理(2)の説明]
次に、並走経路報知システム101の並走経路報知装置110が備えるナビゲーション装置20の制御部29が実行する並走車両情報報知処理(2)について図8のフローチャートを参照して説明する。
【0068】
この並走車両情報報知処理(2)は、運転者によってイグニッションキーが操作されてアクセサリー給電(ACC)の状態になり、並走経路報知装置110が起動している際に繰り返し実行される。
【0069】
まず、前方カメラ40および後方カメラ50が、カメラ前方の様子を画像として入力する(S310)。次に、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できるか否かを判断する(S320)。具体的には、画像処理装置60が、前方カメラ40および後方カメラ50が入力した画像を取得し、その取得した画像に車両のナンバープレートが含まれているか否かを判断する。前方カメラ40および後方カメラ50が入力した画像に車両のナンバープレートが含まれていないと判断された場合には(S320:NO)、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できないとしてS310に戻る。
【0070】
一方、前方カメラ40および後方カメラ50が入力した画像に車両のナンバープレートが含まれていると判断された場合には(S320:YES)、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できたとして、その認識できたナンバープレートに関する情報が情報センタ120に記憶されているか否かを問い合わせる(S330)。具体的には、その認識できたナンバープレートに関する情報を情報センタ120に送信し、受信した情報センタ120から回答によって、その認識できたナンバープレートに関する情報が情報センタ120に記憶されているか否かを判断する。認識できたナンバープレートに関する情報と同一の情報が情報センタ120に記憶されていないと判断された場合には(S330:NO)、S310に戻る。一方、認識できたナンバープレートに関する情報と同一の情報が情報センタ120に記憶されていると判断された場合には(S330:YES)、情報センタ120より経路情報を受信し(S335)、現在位置を中心とする地図情報を参照し(S340)、認識できたナンバープレートに関する情報と同一の情報に含まれる経路情報を、その参照した地図情報とともに表示部26に表示させる(S350、図6(b)参照)。そして、S210に戻る。
【0071】
[並走車両情報記憶処理(2)の説明]
次に、並走経路報知システム101の並走経路報知装置110が備えるナビゲーション装置20の制御部29が実行する並走車両情報記憶処理(2)について図8(b)のフローチャートを参照して説明する。
【0072】
この並走車両情報記憶処理(2)は、運転者によってイグニッションキーが操作されてアクセサリー給電(ACC)の状態になり、並走経路報知装置110が起動している際に実行される。
【0073】
まず、HDD31が記憶するデータが更新されているか否かを判断する(S510)。HDD31が記憶するデータが更新されていないと判断された場合には(S510:NO)、HDD31が記憶するデータが更新されていると判断されるまで待機する。一方、HDD31が記憶するデータが更新されていると判断された場合には(S510:YES)、その更新されたデータを情報センタ120へ送信する。そして、本処理を終了する。
【0074】
[データ更新処理の説明]
次に、情報センタ120の制御部が実行するデータ更新処理について図8(c)のフローチャートを参照して説明する。
【0075】
このデータ更新処理は、情報センタ120が起動している際に実行される。
まず、通信要求があったか否かを判断する(S410)。具体的には、認識できたナンバープレートに関する情報を並走経路報知装置110のナビゲーション装置20から受信したか否かを判断する。認識できたナンバープレートに関する情報を受信しなかったと判断した場合には(S410:NO)、通信要求がなかったと判断して、認識できたナンバープレートに関する情報を受信したと判断するまで待機する。一方、認識できたナンバープレートに関する情報を受信したと判断された場合には(S410:YES)、通信要求があったと判断する。そして、認識できたナンバープレートに関する情報が情報センタ120に記憶されているか否かの問い合わせがあったか否かを判断する(S420)。
【0076】
認識できたナンバープレートに関する情報が情報センタ120に記憶されているか否かの問い合わせがなかったと判断された場合には(S420:NO)、経路情報の受信を行い(S460)、受信した経路情報を記憶部に保存することで記憶内容を更新し(S470)、S410に戻る。
【0077】
一方、認識できたナンバープレートに関する情報が情報センタ120に記憶されているか否かの問い合わせがあったと判断された場合には(S420:YES)、問い合わせの車両のナンバーおよび道路IDを受信し(S430)、その受信した車両のナンバーおよび道路IDを記憶部のデータと照合する(S440)。そして、経路情報を送信し(S450)、S410に戻る。
【0078】
[第二実施形態の効果]
このように第二実施形態の並走経路報知システム101によれば、自車である車両1だけでなく他の車両からの情報を情報センタ120に蓄積することができるので、自車が並走していない車両であっても、自車と並走する可能性がある車両についてもその動きを予測することができる。
【0079】
[他の実施形態]
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、以下のような様々な態様にて実施することが可能である。
【0080】
(1)上記第一実施形態では、制御部29が、画像処理装置60から送信された画像から車両1の周囲を走行する他の車両2,3のナンバープレート2a,3aの画像を抽出し、その抽出したナンバープレート2a,3aの画像からその車両2,3を特定するための車両特定情報を取得するよう構成されているが、これには限られず、制御部29が、画像処理装置60から送信された画像から車両1の周囲を走行する他の車両2,3の輪郭を抽出し、その抽出した輪郭からその車両2,3を特定するための車両特定情報を取得するよう構成してもよい。このように構成しても上記第一実施形態と同様の作用効果を奏する。なお、第二実施形態についても同様である。
【0081】
(2)上記実施形態では、経路情報をその参照した地図情報とともに表示部26に表示させるようにしているが、これには限られず、経路情報を音声にてスピーカから放音してもよい。一例を挙げると、先行車である車両2がいなくなる交差点名やそこまでの距離、右左折する等の情報を音声によって案内するといった具合である。
【0082】
(3)また、認識できたナンバープレートに関する情報と同一の情報に含まれる経路情報が所定数以上存在する場合にのみ、経路情報をその参照した地図情報とともに表示部26に表示させるようにしてもよい。
【0083】
(4)また、認識できたナンバープレートに関する情報と同一の情報に含まれる経路情報が複数存在する場合には、情報センタ120の制御部が、それら複数の経路情報から他の車両2,3が並走する可能性がある経路を推測し、その推測した経路を並走経路報知装置110へ送信するようにしてもよい。このようにすれば、利用者に報知する経路情報の信頼性を高めることができる。
【0084】
(5)また、車両特定情報を特定の道路区間でのみ取得するようにしてもよい。なおこの場合、特定の道路区間を手動で設定するように構成してもよいし、日常的に繰り返し走行する道路に関してのみ、自動的に範囲を設定するようにしてもよい。一例を挙げると、例えば自車の走行履歴情報(走行日時と自車位置情報)を内部に記憶しておき、単位期間内に走行回数が特定回数を超えた場合、日常的な繰り返し走行する道路(例えば通勤)と自動的に認識する方法が考えられる。
【0085】
このように構成すれば、自車が走行する全ての道路区間にて上述の車両特定情報を取得し場合に較べて、車両特定情報を記憶するための記憶容量を小さくすることができる。
【図面の簡単な説明】
【0086】
【図1】並走経路報知装置の構成を示すブロック図である。
【図2】ナビゲーション装置の概略構成を示すブロック図である。
【図3】並走車両情報記憶処理を説明するためのフローチャートである。
【図4】並走車両情報報知処理を説明するためのフローチャートである。
【図5】並走車両情報のデータ構造を説明するための説明図である。
【図6】(a)は表示部に表示される画面例(1)であり、(b)は表示部に表示される画面例(2)である。
【図7】並走経路報知システムの構成を示すブロック図である。
【図8】(a)は並走車両情報報知処理(2)を説明するためのフローチャートであり、(b)は並走車両情報記憶処理(2)を説明するためのフローチャートであり、(c)はデータ更新処理を説明するためのフローチャートである。
【図9】並走車両情報記憶処理および並走車両情報報知処理の適用例を説明する説明図である。
【符号の説明】
【0087】
1,2,3…車両、2a,3a…ナンバープレート、4…他車、10,110…並走経路報知装置、20…ナビゲーション装置、21…位置検出器、21a…GPS受信機、21b…ジャイロスコープ、21c…距離センサ、21d…地磁気センサ、22…操作スイッチ群、23a…リモコン、23b…リモコンセンサ、24…外部情報入出力部、25…地図データ入力器、26…表示部、27…音声出力部、28…マイクロフォン、29…制御部、30…携帯電話、40…前方カメラ、50…後方カメラ、60…画像処理装置、100…自車、102,103,104…先行車、101…並走経路報知システム、120…情報センタ、201,202,203…交差点、204…自宅
【技術分野】
【0001】
本発明は、例えば通勤時などに所定区間を並走する他の車両のような互いに自車の位置を通知し合わない車両についても、その車両の動きを予測する技術に関する。
【背景技術】
【0002】
自動車の走行に伴って移動していく現在位置をモニタ上に道路地図と共に表示したり、現在地から目的地までの適切な経路を設定し、経路案内を行うナビゲーション装置が知られており、より円滑なドライブに寄与している。
【0003】
このようなナビゲーション装置の中には、任意の隣接車両が離れ過ぎたことを目視によらずに認識できるようにし、かつ、離れ過ぎても確実に待合せを可能とするナビゲーション装置がある(例えば、特許文献1参照。)。
【0004】
具体的には、このようなナビゲーション装置は、例えば数台の車両が共通の目的地に向かって走行するいわゆるツーリングを行う場合などに、互いに自車の位置を通知するとともに、任意の隣接二車間の距離が設定距離以上になったか監視し、設定距離以上になれば警報を出力し、待合せポイントが設定された時、該待合せポイントを他の車両のナビゲーション装置に通知し、各車両のナビゲーション装置は待合せポイントに自車を誘導するように構成されている。
【特許文献1】特開2001−108460号公報(第3頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、通勤等では、特定の道路区間を決まった時刻に繰り返し走行するため、同様の走行をしている他車と、同じような場所で出くわし一定区間を併走した後で分岐するような動きをすることが多い。
【0006】
ドライバによっては、日々の運転の中で他車のナンバープレート情報や車体形状あるいは車体色等の車両を特定する情報と、その車両がどの地点まで自車と共に併走するかを記憶しており、たとえば先行車の走行速度が遅い場合であってもすぐに分岐することが分かっている車両に対しては無理な追い越しをする事なくあえて追従走行する、あるいはいつも他車が曲がる交差点付近ではウインカー出し忘れや急ブレーキなどに備えて車間距離を多くとる等を行って事故発生の可能性を下げる等の判断を行いながら運転を行っている。
【0007】
但し、これはドライバの記憶力が特に優れる場合においてであり、大抵のドライバは、例えば以前に見かけた車両であることはわかっても、どの地点まで共に走行するのかまでは曖昧で覚えていない等の曖昧な記憶しか保持できず、成り行きで運転を行ってしまう事が多い。
【0008】
しかし、上述のようなナビゲーション装置においては、例えばツーリングを行う既知の間柄であるユーザ同士が自車の位置を通知し合うことを前提としており、例えば通勤時などに所定区間を並走する他の車両のような互いに自車の位置を通知し合わない車両については、その車両の動きを予測することが困難であるという問題があった。
【0009】
本発明は、このような不具合に鑑みなされたものであり、その目的とするところは、例えば通勤時などに所定区間を並走する他の車両のような互いに自車の位置を通知し合わない車両についても、その車両の動きを予測する技術を提供することにある。
【課題を解決するための手段】
【0010】
上記課題を解決するためになされた請求項1に係る車両の並走経路報知装置は、「周囲を走行する車両と自車とが並走した区間を記憶しておき、その車両と遭遇した際にその記憶した並走区間を読み出して報知すること」を特徴とする。
【0011】
具体的には、車両特定情報取得手段(29:この欄においては、発明に対する理解を容易にするため、必要に応じて「発明を実施するための最良の形態」欄で用いた符号を付すが、この符号によって請求の範囲を限定することを意味するものではない。)が、車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能であり、経路情報取得手段(29)が、他の車両が車両の周囲を走行した経路に関する経路情報を取得可能である。また、記憶手段(31)が、車両特定情報および経路情報を関連付けて記憶可能である。
【0012】
判断手段(29)が、記憶手段が記憶する車両特定情報を参照して、車両特定情報取得手段によって取得された車両特定情報と記憶手段が記憶する車両特定情報とが同一であるか否かを判断する。車両特定情報取得手段によって取得された車両特定情報と記憶手段が記憶する車両特定情報とが判断手段によって同一ではないと判断された場合には、記憶制御手段(29)が、車両特定情報取得手段によって取得された車両特定情報を記憶手段に記憶させるとともに、経路情報取得手段によって取得された経路情報をその記憶させた車両特定情報と関連付けて記憶手段に記憶させる。一方、車両特定情報取得手段によって取得された車両特定情報と記憶手段が記憶する前記車両特定情報とが判断手段によって同一であると判断された場合には、記憶制御手段が、その同一であると判断された車両特定情報と経路情報取得手段によって取得された経路情報とを関連付けて記憶手段に記憶させる。さらに、上述のように前記車両特定情報取得手段によって取得された車両特定情報と記憶手段が記憶する前記車両特定情報とが同一であると判断手段によって判断された場合には、報知制御手段(29)が、その車両特定情報に関連付けられた経路情報を記憶手段から読み出し、その読み出した経路情報を報知手段(26)に報知させる。
【0013】
このように構成された本発明によれば、周囲を走行する車両と自車とが並走した区間を記憶しておき、その車両と遭遇した際にその記憶した並走区間を読み出して報知する。このことにより、例えば通勤時などに所定区間を並走する他の車両のような互いに自車の位置を通知し合わない車両についても、その車両の動きを予測することができる。
【0014】
この場合、上述の車両特定情報取得手段については、車両の周囲の画像を取得し、その取得した画像から前記車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能であることが考えられる(請求項2)。具体的には、車両特定情報取得手段が、車両の周囲の画像を取得し、その取得した画像から車両の周囲を走行する他の車両のナンバープレートの画像を抽出し、その抽出したナンバープレートの画像からその車両を特定するための車両特定情報を取得可能であるといった具合である(請求項3)。また。車両特定情報取得手段が、車両の周囲の画像を取得し、その取得した画像から車両の周囲を走行する他の車両の輪郭を抽出し、その抽出した輪郭からその車両を特定するための車両特定情報を取得可能であるといった具合である。また、車両特定情報取得手段が、車両の周囲の画像を取得し、その取得した画像から、例えば車体の形状、色、あるいは車体に印刷されたマークや文字情報等を抽出し、その抽出した情報からその車両を特定するための車両特定情報を取得するといった具合である。
【0015】
また、上述の車両特定情報取得手段については、車両の周囲のうち車両の前方の画像を取得するよう構成されていることが考えられる(請求項4)。また、車両特定情報取得手段については、車両の周囲のうち車両の後方の画像を取得するよう構成されていることが考えられる(請求項5)。
【0016】
ところで、例えば並走する車両が買い物などのためにコンビニエンスストアなどへ寄った場合には、その車両と並走すべき経路すべてを並走したこととならず、その際に取得した経路情報の信頼性が劣る場合がある。このような場合、利用者に報知する経路情報の信頼性も劣ることとなる。
【0017】
そこで、複数の経路情報から他の車両が並走する可能性がある経路を推測することが考えられる。具体的には、請求項6のように、車両特定情報取得手段によって取得された車両特定情報と記憶手段が記憶する車両特定情報とが判断手段によって同一であると判断された場合に、その車両特定情報に関連付けられた経路情報を記憶手段から読み出した際に、その車両特定情報に関連付けられた経路情報が複数存在するときには、報知制御手段が、その複数の経路情報から他の車両が並走する可能性がある経路を推測し、その推測した経路を経路情報として報知手段に報知させることが考えられる。
【0018】
このように構成すれば、利用者に報知する経路情報の信頼性を高めることができる。
ところで、自車が走行する全ての道路区間にて上述の車両特定情報を取得した場合には、そのデータ量が多くなり、車両特定情報を記憶するための記憶容量が大きくなるおそれがある。
【0019】
そこで、上述の車両特定情報を特定の道路区間でのみ取得することが考えられる。具体的には、請求項7のように、特定の道路区間を設定する道路区間設定手段を備え、車両特定情報取得手段が、道路区間設定手段によって設定された道路区間でのみ、車両の周囲を走行する他の車両を特定するための車両特定情報を取得することが考えられる。なお、上述の道路区間設定手段については、特定の道路区間を手動で設定するように校正してもよいし、日常的に繰り返し走行する道路に関してのみ、自動的に範囲を設定するようにしてもよい。一例を挙げると、例えば自車の走行履歴情報(走行日時と自車位置情報)を内部に記憶しておき、単位期間内に走行回数が特定回数を超えた場合、日常的な繰り返し走行する道路(例えば通勤)と自動的に認識する方法が考えられる。
【0020】
このように構成すれば、自車が走行する全ての道路区間にて上述の車両特定情報を取得した場合に較べて、車両特定情報を記憶するための記憶容量を小さくすることができる。
ところで、上記課題を解決するためになされた請求項8に係る並走経路報知システムは、「周囲を走行する車両と自車とが並走した区間を情報センタに送信して記憶しておき、その車両と遭遇した際にその記憶した並走区間を情報センタから受信して報知すること」を特徴とする。
【0021】
具体的には、上述の並走経路報知システム(101)は、車両の周囲を走行する他の車両が以前並走したことがある車両である場合には並走した経路を報知する並走経路報知装置(110)と、情報センタ(120)と、を備え、並走経路報知装置と情報センタと通信網を介して通信可能に構成されている。
【0022】
このうち並走経路報知装置においては、車両特定情報取得手段が、車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能であり、経路情報取得手段が、他の車両が車両の周囲を走行した経路に関する経路情報を取得可能であり、装置側送受信手段が、情報センタとの間で各種データを送受信可能である。そして、装置側送信制御手段が、装置側送受信手段を介して車両特定情報および経路情報を前記情報センタへ送信させる。
【0023】
一方、情報センタにおいては、センタ側送受信手段(120)が、並走経路報知装置との間で各種データを送受信可能であり、記憶手段(120)が、センタ側送受信手段が受信した車両特定情報および経路情報を関連付けて記憶可能である。そして、判断手段(120)が、記憶手段が記憶する車両特定情報を参照して、センタ側送受信手段が受信した車両特定情報と記憶手段が記憶する車両特定情報とが同一であるか否かを判断する。センタ側送受信手段が受信した車両特定情報と記憶手段が記憶する車両特定情報とが判断手段によって同一ではないと判断された場合には、記憶制御手段(120)が、センタ側送受信手段が受信した車両特定情報を記憶手段に記憶させるとともに、センタ側送受信手段が受信した経路情報をその記憶させた車両特定情報と関連付けて記憶手段に記憶させる。一方、センタ側送受信手段が受信した車両特定情報と記憶手段が記憶する車両特定情報とが判断手段によって同一であると判断された場合には、記憶制御手段が、その同一であると判断された車両特定情報とセンタ側送受信手段が受信した経路情報とを関連付けて記憶手段に記憶させる。
【0024】
さらに、上述のようにセンタ側送受信手段が受信した車両特定情報と記憶手段が記憶する車両特定情報とが同一であると判断手段によって判断された場合には、センタ側送信制御手段(120)が、その車両特定情報に関連付けられた経路情報を記憶手段から読み出し、センタ側送受信手段を制御してその読み出した経路情報を並走経路報知装置へと送信させる。
【0025】
また、並走経路報知装置においては、装置側送受信手段が受信した経路情報を報知制御手段が報知手段に報知させる。
このように構成された本発明によれば、自車だけでなく複数の車両からの情報を情報センタに蓄積することができるので、自車が並走していない車両であっても、自車と並走する可能性がある車両についてもその動きを予測することができる。
【0026】
この場合、上述の車両特定情報取得手段については、車両の周囲の画像を取得し、その取得した画像から前記車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能であることが考えられる(請求項9)。具体的には、車両特定情報取得手段が、車両の周囲の画像を取得し、その取得した画像から車両の周囲を走行する他の車両のナンバープレートの画像を抽出し、その抽出したナンバープレートの画像からその車両を特定するための車両特定情報を取得可能であるといった具合である(請求項10)。また。車両特定情報取得手段が、車両の周囲の画像を取得し、その取得した画像から車両の周囲を走行する他の車両の輪郭を抽出し、その抽出した輪郭からその車両を特定するための車両特定情報を取得可能であるといった具合である。また、車両特定情報取得手段が、車両の周囲の画像を取得し、その取得した画像から、例えば車体の形状、色、あるいは車体に印刷されたマークや文字情報等を抽出し、その抽出した情報からその車両を特定するための車両特定情報を取得するといった具合である。
【0027】
また、上述の車両特定情報取得手段については、車両の周囲のうち車両の前方の画像を取得するよう構成されていることが考えられる(請求項11)。また、車両特定情報取得手段については、車両の周囲のうち車両の後方の画像を取得するよう構成されていることが考えられる(請求項12)。
【0028】
ところで、例えば並走する車両が買い物などのためにコンビニエンスストアなどへ寄った場合には、その車両と並走すべき経路すべてを並走したこととならず、その際に取得した経路情報の信頼性が劣る場合がある。このような場合、利用者に報知する経路情報の信頼性も劣ることとなる。
【0029】
そこで、複数の経路情報から他の車両が並走する可能性がある経路を推測することが考えられる。具体的には、請求項13のように、センタ側送受信手段が受信した車両特定情報と記憶手段が記憶する車両特定情報とが判断手段によって同一であると判断された場合に、その車両特定情報に関連付けられた経路情報を記憶手段から読み出した際に、その車両特定情報に関連付けられた経路情報が複数存在するときには、送信制御手段が、その複数の経路情報から他の車両が並走する可能性がある経路を推測し、センタ側送受信手段を制御してその推測した経路を経路情報として並走経路報知装置へと送信させることが考えられる。
【0030】
このようにすれば、利用者に報知する経路情報の信頼性を高めることができる。
ところで、自車が走行する全ての道路区間にて上述の車両特定情報を取得した場合には、そのデータ量が多くなり、車両特定情報を記憶するための記憶容量が大きくなるおそれがある。
【0031】
そこで、上述の車両特定情報を特定の道路区間でのみ取得することが考えられる。具体的には、請求項14のように、特定の道路区間を設定する道路区間設定手段を備え、車両特定情報取得手段が、道路区間設定手段によって設定された道路区間でのみ、車両の周囲を走行する他の車両を特定するための車両特定情報を取得することが考えられる。なお、上述の道路区間設定手段については、特定の道路区間を手動で設定するように校正してもよいし、日常的に繰り返し走行する道路に関してのみ、自動的に範囲を設定するようにしてもよい。一例を挙げると、例えば自車の走行履歴情報(走行日時と自車位置情報)を内部に記憶しておき、単位期間内に走行回数が特定回数を超えた場合、日常的な繰り返し走行する道路(例えば通勤)と自動的に認識する方法が考えられる。
【0032】
このように構成すれば、自車が走行する全ての道路区間にて上述の車両特定情報を取得した場合に較べて、車両特定情報を記憶するための記憶容量を小さくすることができる。
【発明を実施するための最良の形態】
【0033】
以下に本発明の実施形態を図面とともに説明する。
[第一実施形態]
図1は並走経路報知装置10の構成を示すブロック図である。また、図2はナビゲーション装置20の概略構成を示すブロック図である。
【0034】
[並走経路報知装置10の構成の説明]
図1に示すように、車両1には、並走経路報知装置10が取り付けられている。この並走経路報知装置10は、ナビゲーション装置20と、前方カメラ40と、後方カメラ50と、画像処理装置60と、を備える。なお、上述の前方カメラ40および後方カメラ50は画像処理装置60に接続され、取得した画像データを画像処理装置60へ送信可能に構成されている。また、画像処理装置60は、ナビゲーション装置20に接続され、画像処理後のデータをナビゲーション装置20へ送信可能に構成されている。
【0035】
[ナビゲーション装置20の構成の説明]
図2に示すように、ナビゲーション装置20は車両に搭載され、車両の現在位置を検出する位置検出器21と、ユーザからの各種指示を入力するための操作スイッチ群22と、操作スイッチ群22と同様に各種指示を入力可能であってナビゲーション装置20とは別体となったリモートコントロール端末(以下、リモコンと称す)23aと、リモコン23aからの信号を入力するリモコンセンサ23bと、ナビゲーション装置20とは別の装置から情報を入力したり別の装置に情報を出力したりすることが可能な外部情報入出力部24と、地図データや各種の情報を記録した地図記憶媒体から地図データ等を入力する地図データ入力器25と、各種データを記憶するためのHDD31と、地図や各種情報の表示を行うための表示部26と、各種のガイド音声等を出力するための音声出力部27と、上述した位置検出器21、操作スイッチ群22、リモコンセンサ23b、外部情報入出力部24、地図データ入力器25からの入力に応じて各種処理を実行し、外部情報入出力部24、表示部26、音声出力部27を制御する制御部29とを備えている。
【0036】
位置検出器21は、GPS(Global Positioning System)用の人工衛星からの送信電波をGPSアンテナを介して受信し、車両の位置、方位、速度等を検出するGPS受信機21aと、車両に加えられる回転運動の大きさを検出するジャイロスコープ21bと、車両の前後方向の加速度等から走行した距離を検出するための距離センサ21cと、地磁気から進行方位を検出するための地磁気センサ21dとを備えている。そして、これら各センサ等21a〜21dは、各々が性質の異なる誤差を有しているため、互いに補完しながら使用するように構成されている。
【0037】
操作スイッチ群22は、表示部26の表示面と一体に構成されたタッチパネル及び表示部26の周囲に設けられたメカニカルなキースイッチ等から構成される。尚、タッチパネルと表示部26とは積層一体化されており、タッチパネルには、感圧方式、電磁誘導方式、静電容量方式、あるいはこれらを組み合わせた方式など各種の方式があるが、その何れを用いてもよい。
【0038】
外部情報入出力部24は、他の外部機器等に接続され、それらの機器との間で情報を入出力する機能を担う。なお、この外部機器の一つとして携帯電話30と接続されている。このことにより、外部情報入出力部24は携帯電話30を介して外部とデータ通信可能である。
【0039】
地図データ入力器25は、図示しない地図記憶媒体に記憶された各種データを入力するための装置である。地図記憶媒体には、地図データ(道路データ、地形データ、マークデータ、交差点データ、施設のデータ等)、案内用の音声データ、音声認識データ等が記憶されている。このようなデータを記憶する地図記憶媒体の種類としては、そのデータ量からCD−ROMやDVDを用いるのが一般的であるが、ハードディスクなどの磁気記憶装置やメモリカード等の媒体を用いても良い。
【0040】
HDD31は、不揮発性メモリで構成され、各種データを記憶するのに利用される。また、HDD31は、車両特定情報および経路情報を関連付けた「並走車両情報」を記憶するのに利用される(図5参照)。ここで、「車両特定情報」とは、自車と並走したことがある並走車両を特定するための情報を云い、例えばその車両のナンバーなどが挙げられる(図5参照)。また、経路情報とは、上述の並走車両が自車と並走した経路を示す情報を云い、並走した日時、並走を開始した地点を示す情報、並走した道路の道路ID情報および並走を終了した地点を示す情報から構成される(図5参照)。
【0041】
なお、HDD31は記憶手段に該当する。
表示部26は、カラー表示装置であり、液晶ディスプレイ、有機ELディスプレイ、CRTなどがあるが、その何れを用いてもよい。表示部26の表示画面には、位置検出器21にて検出した車両の現在位置と地図データ入力器25より入力された地図データとから特定した現在地を示すマーク、目的地までの誘導経路、名称、目印、各種施設のマーク等の付加データとを重ねて表示することができる(図6(a)参照)。また、施設のガイド等も表示できる。なお、表示部26は報知手段に該当する。
【0042】
音声出力部27は、地図データ入力器25より入力した施設のガイドや各種案内の音声を出力することができる。
マイクロフォン28は、利用者が音声を入力(発話)するとその入力した音声に基づく電気信号(音声信号)を制御部29に出力するものである。利用者はこのマイクロフォン28に様々な音声を入力することにより、ナビゲーション装置20を操作することができる。
【0043】
制御部29は、CPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインなどからなる周知のマイクロコンピュータを中心に構成されており、ROM及びRAMに記憶されたプログラムに基づいて各種処理を実行する。例えば、位置検出器21からの各検出信号に基づき座標及び進行方向の組として車両の現在位置を算出し、地図データ入力器25を介して読み込んだ現在位置付近の地図等を表示部26に表示する表示処理や、地図データ入力器25に格納された地点データと、操作スイッチ群22やリモコン23a等の操作に従って設定された目的地とに基づいて、現在位置から目的地までの最適な経路を算出し、その算出した経路を案内する経路案内処理を行う。また、制御部29は後述する送信処理や受信処理で用いた各種データを記憶保持することができるようになっている。
【0044】
なお、制御部29は車両特定情報取得手段、経路情報取得手段、判断手段、記憶制御手段および報知制御手段に該当する。
[前方カメラ40の構成の説明]
前方カメラ40は、CCDカメラである。また、前方カメラ40は、車両1の前部に取り付けられており、車両1の前方を走行する車両2のナンバープレート2aを含む車両1の前方の状況を撮影することができる。
【0045】
[後方カメラ50の構成の説明]
後方カメラ50は、CCDカメラである。また、後方カメラ50は、車両1の後部に取り付けられており、車両1の後方を走行する車両3のナンバープレート3aを含む車両1の後方の状況を撮影することができる。
【0046】
[画像処理装置60の構成の説明]
画像処理装置60は、CPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインなどからなる周知のマイクロコンピュータを中心に構成されており、ROM及びRAMに記憶されたプログラムに基づいて各種処理を実行する。この画像処理装置60は、前方カメラ40および後方カメラ50から取得した画像データを画像処理し、その画像処理した画像データをナビゲーション装置20へ送信する機能を有する。
【0047】
[並走車両情報記憶処理の説明]
次に、並走経路報知装置10のナビゲーション装置20の制御部29が実行する並走車両情報記憶処理について図3のフローチャートおよび図5を参照して説明する。なお、図5は並走車両情報のデータ構造を説明するための説明図である。
【0048】
この並走車両情報記憶処理は、運転者によってイグニッションキーが操作されてアクセサリー給電(ACC)の状態になり、並走経路報知装置10が起動している際に実行される。
【0049】
まず、前方カメラ40および後方カメラ50が、カメラ前方の様子を画像として入力する(S110)。次に、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できるか否かを判断する(S120)。具体的には、画像処理装置60が、前方カメラ40および後方カメラ50が入力した画像を取得し、その取得した画像に車両のナンバープレートが含まれているか否かを判断する。前方カメラ40および後方カメラ50が入力した画像に車両のナンバープレートが含まれていないと判断された場合には(S120:NO)、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できないとしてS110に戻る。
【0050】
一方、前方カメラ40および後方カメラ50が入力した画像に車両のナンバープレートが含まれていると判断された場合には(S120:YES)、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できたとして、その認識できたナンバープレートに関する情報と同一の情報がHDD31に記憶されているか否かを判断する(S130)。認識できたナンバープレートに関する情報と同一の情報がHDD31に記憶されていないと判断された場合には(S130:NO)、認識できたナンバープレートに関する情報を新規レコードとしてHDD31に追加するとともに(S140)、現在位置に関する情報を並走開始地点としてHDD31の追加した新規レコードへ記憶する(S150)。一方、認識できたナンバープレートに関する情報と同一の情報がHDD31に記憶されていると判断された場合には(S130:YES)、現在位置に関する情報を並走開始地点としてHDD31の既存のレコードへ記憶する(S150)。
【0051】
続いて、自車が走行中の道路IDをHDD31へ記憶する(S160)。そして、上述のS110と同様に、前方カメラ40および後方カメラ50が、カメラ前方の様子を画像として入力し(S170)、上述のS120と同様に前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できるか否かを判断する(S180)。前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できた場合には(S180:YES)、S160に戻る。
【0052】
一方、例えば、先行車である車両2が右左折等によって自車の前から居なくなると、前方カメラ40が前車を捉えなくなり、画像処理装置60から車両2のナンバープレート2aの画像がナビゲーション装置20に伝達されなくなるといった具合に、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できない場合には(S180:NO)、現在位置に関する情報を並走開始地点としてHDD31へ記憶する(S190)。そしてS110に戻る。
【0053】
[並走車両情報報知処理の説明]
次に、並走経路報知装置10のナビゲーション装置20の制御部29が実行する並走車両情報報知処理について図4のフローチャートおよび図6(b)を参照して説明する。なお、図6(b)は表示部に表示される画面例(2)である。
【0054】
この並走車両情報報知処理は、運転者によってイグニッションキーが操作されてアクセサリー給電(ACC)の状態になり、並走経路報知装置10が起動している際に繰り返し実行される。
【0055】
まず、前方カメラ40および後方カメラ50が、カメラ前方の様子を画像として入力する(S210)。次に、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できるか否かを判断する(S220)。具体的には、画像処理装置60が、前方カメラ40および後方カメラ50が入力した画像を取得し、その取得した画像に車両のナンバープレートが含まれているか否かを判断する。前方カメラ40および後方カメラ50が入力した画像に車両のナンバープレートが含まれていないと判断された場合には(S220:NO)、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できないとしてS210に戻る。
【0056】
一方、前方カメラ40および後方カメラ50が入力した画像に車両のナンバープレートが含まれていると判断された場合には(S220:YES)、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できたとして、その認識できたナンバープレートに関する情報と同一の情報がHDD31に記憶されているか否かを判断する(S230)。認識できたナンバープレートに関する情報と同一の情報がHDD31に記憶されていないと判断された場合には(S230:NO)、S210に戻る。一方、認識できたナンバープレートに関する情報と同一の情報がHDD31に記憶されていると判断された場合には(S230:YES)、現在位置を中心とする地図情報を参照し(S340)、認識できたナンバープレートに関する情報と同一の情報に含まれる経路情報を、その参照した地図情報とともに表示部26に表示させる(S250、図6(b)参照)。そして、S210に戻る。
【0057】
[並走車両情報記憶処理および並走車両情報報知処理の適用例の説明]
次に、上述の並走車両情報記憶処理および並走車両情報報知処理の適用例について、図9を参照して説明する。図9に例示するように、例えば、自宅204から自車100が道路へと移動した際に、先行車として車両102,103,104が走行していたとする。これら車両102,103,104は、過去に並走したことがあるものとし、先行車A(車両102)は交差点201で左折して自車100と別れ、先行車B(車両103)は交差点202で右折して自車と別れ、先行車C(車両104)は自車100と同じ目的地203まで走行した場合には、上述の並走車両情報記憶処理によって、上述の自車100と車両102,103,104との並走経路を示す経路情報がナビゲーション装置20に記憶される。
【0058】
まず、最初の先行車が先行車A(車両102)であるため、前方カメラ40によって先行車A(車両102)のナンバープレート2aを撮影し、その撮影した画像を画像処理装置60に送信する。画像処理装置60ではこの画像を画像処理してナビゲーション装置20へ送信する。ナビゲーション装置20では、先行車A(車両102)のナンバープレート情報がHDD31に格納されていることを確認すると、先行車A(車両102)が前回追従走行した際には交差点201で左折した旨をドライバに案内する。
【0059】
さらに、交差点201を通過すると、先行車は先行車B(車両103)であるため、前方カメラ40によって先行車B(車両103)のナンバープレート2aを撮影し、その撮影した画像を画像処理装置60に送信する。画像処理装置60ではこの画像を画像処理してナビゲーション装置20へ送信する。ナビゲーション装置20では、先行車B(車両103)のナンバープレート情報がHDD31に格納されていることを確認すると、先行車B(車両103)が前回追従走行した際には交差点202で左折した旨をドライバに案内する。
【0060】
そして、交差点202を通過すると、先行車は先行車C(車両104)であるため、前方カメラ40によって先行車C(車両104)のナンバープレート2aを撮影し、その撮影した画像を画像処理装置60に送信する。画像処理装置60ではこの画像を画像処理してナビゲーション装置20へ送信する。ナビゲーション装置20では、先行車C(車両104)のナンバープレート情報がHDD31に格納されていることを確認すると、先行車C(車両104)が前回追従走行した場合には同一の目的地302まで一緒に走行した事を案内する。
【0061】
以上によって、ドライバはあらかじめ先行車がどのポイントでどのような動きをするのかをあらかじめ把握できるため、運転に余裕をもって対処することが可能となる。
[第一実施形態の効果]
このように第一実施形態の並走経路報知装置10によれば、周囲を走行する車両2,3と自車である車両1とが並走した区間を記憶しておき、その車両2,3と遭遇した際にその記憶した並走区間を読み出して報知する。このことにより、例えば通勤時などに所定区間を並走する他の車両2,3のような互いに自車の位置を通知し合わない車両についても、その車両の動きを予測することができる。
[第二実施形態]
上記第一実施形態の並走経路報知装置10は、周囲を走行する車両2,3と自車両1とが並走した区間を記憶しておき、その車両2,3と遭遇した際にその記憶した並走区間を読み出して報知するよう構成されている。
【0062】
これに対して、第二実施形態の並走経路報知システムは、並走経路報知装置110および情報センタ120から構成されている。
[並走経路報知装置110の構成の説明]
図7に示すように、車両1や他車4には、並走経路報知装置110がそれぞれ取り付けられている。この並走経路報知装置110は、ナビゲーション装置20と、前方カメラ40と、後方カメラ50と、画像処理装置60と、を備える。
【0063】
なお、上述の前方カメラ40および後方カメラ50は画像処理装置60に接続され、取得した画像データを画像処理装置60へ送信可能に構成されている。また、画像処理装置60は、ナビゲーション装置20に接続され、画像処理後のデータをナビゲーション装置20へ送信可能に構成されている。
【0064】
なお、ナビゲーション装置20、前方カメラ40、後方カメラ50および画像処理装置60については、第一実施形態の並走経路報知装置10が備える各構成と共通なので、ここでは同じ符号を使用してその詳細な説明は省略する。
【0065】
なお、外部情報入出力部24は、装置側送受信手段に該当する。また、表示部26は報知手段に該当する。なお、制御部29は、車両特定情報取得手段、経路情報取得手段、装置側送信制御手段および報知制御手段に該当する。また、HDD31は記憶手段に該当する。
【0066】
[情報センタ120の構成の説明]
情報センタ120は、CPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインなどからなる周知のマイクロコンピュータを中心に構成されており、ROM及びRAMに記憶されたプログラムに基づいて各種処理を実行する。また、情報センタ120は、図示しない通信I/Fを備えており、この通信I/Fを介して外部と通信可能である。なお、情報センタ120は、記憶手段、記憶制御手段、判断手段、センタ側送受信手段およびセンタ側送信制御手段に該当する。
【0067】
[並走車両情報報知処理(2)の説明]
次に、並走経路報知システム101の並走経路報知装置110が備えるナビゲーション装置20の制御部29が実行する並走車両情報報知処理(2)について図8のフローチャートを参照して説明する。
【0068】
この並走車両情報報知処理(2)は、運転者によってイグニッションキーが操作されてアクセサリー給電(ACC)の状態になり、並走経路報知装置110が起動している際に繰り返し実行される。
【0069】
まず、前方カメラ40および後方カメラ50が、カメラ前方の様子を画像として入力する(S310)。次に、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できるか否かを判断する(S320)。具体的には、画像処理装置60が、前方カメラ40および後方カメラ50が入力した画像を取得し、その取得した画像に車両のナンバープレートが含まれているか否かを判断する。前方カメラ40および後方カメラ50が入力した画像に車両のナンバープレートが含まれていないと判断された場合には(S320:NO)、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できないとしてS310に戻る。
【0070】
一方、前方カメラ40および後方カメラ50が入力した画像に車両のナンバープレートが含まれていると判断された場合には(S320:YES)、前方カメラ40および後方カメラ50が入力した画像からナンバープレートを認識できたとして、その認識できたナンバープレートに関する情報が情報センタ120に記憶されているか否かを問い合わせる(S330)。具体的には、その認識できたナンバープレートに関する情報を情報センタ120に送信し、受信した情報センタ120から回答によって、その認識できたナンバープレートに関する情報が情報センタ120に記憶されているか否かを判断する。認識できたナンバープレートに関する情報と同一の情報が情報センタ120に記憶されていないと判断された場合には(S330:NO)、S310に戻る。一方、認識できたナンバープレートに関する情報と同一の情報が情報センタ120に記憶されていると判断された場合には(S330:YES)、情報センタ120より経路情報を受信し(S335)、現在位置を中心とする地図情報を参照し(S340)、認識できたナンバープレートに関する情報と同一の情報に含まれる経路情報を、その参照した地図情報とともに表示部26に表示させる(S350、図6(b)参照)。そして、S210に戻る。
【0071】
[並走車両情報記憶処理(2)の説明]
次に、並走経路報知システム101の並走経路報知装置110が備えるナビゲーション装置20の制御部29が実行する並走車両情報記憶処理(2)について図8(b)のフローチャートを参照して説明する。
【0072】
この並走車両情報記憶処理(2)は、運転者によってイグニッションキーが操作されてアクセサリー給電(ACC)の状態になり、並走経路報知装置110が起動している際に実行される。
【0073】
まず、HDD31が記憶するデータが更新されているか否かを判断する(S510)。HDD31が記憶するデータが更新されていないと判断された場合には(S510:NO)、HDD31が記憶するデータが更新されていると判断されるまで待機する。一方、HDD31が記憶するデータが更新されていると判断された場合には(S510:YES)、その更新されたデータを情報センタ120へ送信する。そして、本処理を終了する。
【0074】
[データ更新処理の説明]
次に、情報センタ120の制御部が実行するデータ更新処理について図8(c)のフローチャートを参照して説明する。
【0075】
このデータ更新処理は、情報センタ120が起動している際に実行される。
まず、通信要求があったか否かを判断する(S410)。具体的には、認識できたナンバープレートに関する情報を並走経路報知装置110のナビゲーション装置20から受信したか否かを判断する。認識できたナンバープレートに関する情報を受信しなかったと判断した場合には(S410:NO)、通信要求がなかったと判断して、認識できたナンバープレートに関する情報を受信したと判断するまで待機する。一方、認識できたナンバープレートに関する情報を受信したと判断された場合には(S410:YES)、通信要求があったと判断する。そして、認識できたナンバープレートに関する情報が情報センタ120に記憶されているか否かの問い合わせがあったか否かを判断する(S420)。
【0076】
認識できたナンバープレートに関する情報が情報センタ120に記憶されているか否かの問い合わせがなかったと判断された場合には(S420:NO)、経路情報の受信を行い(S460)、受信した経路情報を記憶部に保存することで記憶内容を更新し(S470)、S410に戻る。
【0077】
一方、認識できたナンバープレートに関する情報が情報センタ120に記憶されているか否かの問い合わせがあったと判断された場合には(S420:YES)、問い合わせの車両のナンバーおよび道路IDを受信し(S430)、その受信した車両のナンバーおよび道路IDを記憶部のデータと照合する(S440)。そして、経路情報を送信し(S450)、S410に戻る。
【0078】
[第二実施形態の効果]
このように第二実施形態の並走経路報知システム101によれば、自車である車両1だけでなく他の車両からの情報を情報センタ120に蓄積することができるので、自車が並走していない車両であっても、自車と並走する可能性がある車両についてもその動きを予測することができる。
【0079】
[他の実施形態]
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、以下のような様々な態様にて実施することが可能である。
【0080】
(1)上記第一実施形態では、制御部29が、画像処理装置60から送信された画像から車両1の周囲を走行する他の車両2,3のナンバープレート2a,3aの画像を抽出し、その抽出したナンバープレート2a,3aの画像からその車両2,3を特定するための車両特定情報を取得するよう構成されているが、これには限られず、制御部29が、画像処理装置60から送信された画像から車両1の周囲を走行する他の車両2,3の輪郭を抽出し、その抽出した輪郭からその車両2,3を特定するための車両特定情報を取得するよう構成してもよい。このように構成しても上記第一実施形態と同様の作用効果を奏する。なお、第二実施形態についても同様である。
【0081】
(2)上記実施形態では、経路情報をその参照した地図情報とともに表示部26に表示させるようにしているが、これには限られず、経路情報を音声にてスピーカから放音してもよい。一例を挙げると、先行車である車両2がいなくなる交差点名やそこまでの距離、右左折する等の情報を音声によって案内するといった具合である。
【0082】
(3)また、認識できたナンバープレートに関する情報と同一の情報に含まれる経路情報が所定数以上存在する場合にのみ、経路情報をその参照した地図情報とともに表示部26に表示させるようにしてもよい。
【0083】
(4)また、認識できたナンバープレートに関する情報と同一の情報に含まれる経路情報が複数存在する場合には、情報センタ120の制御部が、それら複数の経路情報から他の車両2,3が並走する可能性がある経路を推測し、その推測した経路を並走経路報知装置110へ送信するようにしてもよい。このようにすれば、利用者に報知する経路情報の信頼性を高めることができる。
【0084】
(5)また、車両特定情報を特定の道路区間でのみ取得するようにしてもよい。なおこの場合、特定の道路区間を手動で設定するように構成してもよいし、日常的に繰り返し走行する道路に関してのみ、自動的に範囲を設定するようにしてもよい。一例を挙げると、例えば自車の走行履歴情報(走行日時と自車位置情報)を内部に記憶しておき、単位期間内に走行回数が特定回数を超えた場合、日常的な繰り返し走行する道路(例えば通勤)と自動的に認識する方法が考えられる。
【0085】
このように構成すれば、自車が走行する全ての道路区間にて上述の車両特定情報を取得し場合に較べて、車両特定情報を記憶するための記憶容量を小さくすることができる。
【図面の簡単な説明】
【0086】
【図1】並走経路報知装置の構成を示すブロック図である。
【図2】ナビゲーション装置の概略構成を示すブロック図である。
【図3】並走車両情報記憶処理を説明するためのフローチャートである。
【図4】並走車両情報報知処理を説明するためのフローチャートである。
【図5】並走車両情報のデータ構造を説明するための説明図である。
【図6】(a)は表示部に表示される画面例(1)であり、(b)は表示部に表示される画面例(2)である。
【図7】並走経路報知システムの構成を示すブロック図である。
【図8】(a)は並走車両情報報知処理(2)を説明するためのフローチャートであり、(b)は並走車両情報記憶処理(2)を説明するためのフローチャートであり、(c)はデータ更新処理を説明するためのフローチャートである。
【図9】並走車両情報記憶処理および並走車両情報報知処理の適用例を説明する説明図である。
【符号の説明】
【0087】
1,2,3…車両、2a,3a…ナンバープレート、4…他車、10,110…並走経路報知装置、20…ナビゲーション装置、21…位置検出器、21a…GPS受信機、21b…ジャイロスコープ、21c…距離センサ、21d…地磁気センサ、22…操作スイッチ群、23a…リモコン、23b…リモコンセンサ、24…外部情報入出力部、25…地図データ入力器、26…表示部、27…音声出力部、28…マイクロフォン、29…制御部、30…携帯電話、40…前方カメラ、50…後方カメラ、60…画像処理装置、100…自車、102,103,104…先行車、101…並走経路報知システム、120…情報センタ、201,202,203…交差点、204…自宅
【特許請求の範囲】
【請求項1】
車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能な車両特定情報取得手段と、
前記他の車両が前記車両の周囲を走行した経路に関する経路情報を取得可能な経路情報取得手段と、
前記車両特定情報および前記経路情報を関連付けて記憶可能な記憶手段と、
前記記憶手段が記憶する前記車両特定情報を参照して、前記車両特定情報取得手段によって取得された車両特定情報と前記記憶手段が記憶する前記車両特定情報とが同一であるか否かを判断する判断手段と、
前記車両特定情報取得手段によって取得された車両特定情報と前記記憶手段が記憶する前記車両特定情報とが前記判断手段によって同一ではないと判断された場合には、前記車両特定情報取得手段によって取得された車両特定情報を前記記憶手段に記憶させるとともに、前記経路情報取得手段によって取得された経路情報をその記憶させた車両特定情報と関連付けて前記記憶手段に記憶させ、一方、前記車両特定情報取得手段によって取得された車両特定情報と前記記憶手段が記憶する前記車両特定情報とが前記判断手段によって同一であると判断された場合には、その同一であると判断された車両特定情報と前記経路情報取得手段によって取得された経路情報とを関連付けて前記記憶手段に記憶させる記憶制御手段と、
前記経路情報を報知可能な報知手段と、
前記判断手段によって前記車両特定情報取得手段によって取得された車両特定情報と前記記憶手段が記憶する前記車両特定情報とが同一であると判断された場合には、その車両特定情報に関連付けられた経路情報を前記記憶手段から読み出し、その読み出した経路情報を前記報知手段に報知させる報知制御手段と、
を備えることを特徴とする車両の並走経路報知装置。
【請求項2】
請求項1に記載の車両の並走経路報知装置において、
前記車両特定情報取得手段は、前記車両の周囲の画像を取得し、その取得した画像から前記車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能であることを特徴とする車両の並走経路報知装置。
【請求項3】
請求項2に記載の車両の並走経路報知装置において、
前記車両特定情報取得手段は、前記車両の周囲の画像を取得し、その取得した画像から前記車両の周囲を走行する他の車両のナンバープレートの画像を抽出し、その抽出したナンバープレートの画像からその車両を特定するための車両特定情報を取得可能であることを特徴とする車両の並走経路報知装置。
【請求項4】
請求項2または請求項3に記載の車両の並走経路報知装置において、
前記車両特定情報取得手段は、前記車両の周囲のうち前記車両の前方の画像を取得するよう構成されていることを特徴とする車両の並走経路報知装置。
【請求項5】
請求項2〜請求項4の何れかに記載の車両の並走経路報知装置において、
前記車両特定情報取得手段は、前記車両の周囲のうち前記車両の後方の画像を取得するよう構成されていることを特徴とする車両の並走経路報知装置。
【請求項6】
請求項1〜請求項5の何れかに記載の車両の並走経路報知装置において、
前記報知制御手段は、前記車両特定情報取得手段によって取得された車両特定情報と前記記憶手段が記憶する前記車両特定情報とが同一であると前記判断手段によって判断された場合に、その車両特定情報に関連付けられた経路情報を前記記憶手段から読み出した際に、その車両特定情報に関連付けられた経路情報が複数存在するときには、その複数の経路情報から他の車両が並走する可能性がある経路を推測し、その推測した経路を経路情報として前記報知手段に報知させることを特徴とする車両の並走経路報知装置。
【請求項7】
請求項1〜請求項6の何れかに記載の車両の並走経路報知装置において、
特定の道路区間を設定する道路区間設定手段を備え、
前記車両特定情報取得手段は、前記道路区間設定手段によって設定された道路区間でのみ、車両の周囲を走行する他の車両を特定するための車両特定情報を取得すること
を特徴とする車両の並走経路報知装置。
【請求項8】
車両の周囲を走行する他の車両が以前並走したことがある車両である場合には並走した経路を報知する並走経路報知装置と、情報センタと、を備え、前記並走経路報知装置と前記情報センタとが通信網を介して通信可能に構成された並走経路報知システムであって、
前記並走経路報知装置は、
車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能な車両特定情報取得手段と、
前記他の車両が前記車両の周囲を走行した経路に関する経路情報を取得可能な経路情報取得手段と、
前記情報センタとの間で各種データを送受信可能な装置側送受信手段と、
前記装置側送受信手段を介して前記車両特定情報および前記経路情報を前記情報センタへ送信させる装置側送信制御手段と、
を備え、
前記情報センタは、
前記並走経路報知装置との間で各種データを送受信可能なセンタ側送受信手段と、
前記センタ側送受信手段が受信した前記車両特定情報および前記経路情報を関連付けて記憶可能な記憶手段と、
前記記憶手段が記憶する前記車両特定情報を参照して、前記センタ側送受信手段が受信した車両特定情報と前記記憶手段が記憶する前記車両特定情報とが同一であるか否かを判断する判断手段と、
前記センタ側送受信手段が受信した車両特定情報と前記記憶手段が記憶する前記車両特定情報とが前記判断手段によって同一ではないと判断された場合には、前記センタ側送受信手段が受信した車両特定情報を前記記憶手段に記憶させるとともに、前記センタ側送受信手段が受信した経路情報をその記憶させた車両特定情報と関連付けて前記記憶手段に記憶させ、一方、前記センタ側送受信手段が受信した車両特定情報と前記記憶手段が記憶する前記車両特定情報とが前記判断手段によって同一であると判断された場合には、その同一であると判断された車両特定情報と前記センタ側送受信手段が受信した経路情報とを関連付けて前記記憶手段に記憶させる記憶制御手段と、
前記センタ側送受信手段が受信した車両特定情報と前記記憶手段が記憶する前記車両特定情報とが同一であると前記判断手段によって判断された場合には、その車両特定情報に関連付けられた経路情報を前記記憶手段から読み出し、前記センタ側送受信手段を制御してその読み出した経路情報を前記並走経路報知装置へと送信させるセンタ側送信制御手段と、
を備え、
前記並走経路報知装置は、
前記経路情報を報知可能な報知手段と、
前記装置側送受信手段が受信した経路情報を前記報知手段に報知させる報知制御手段と、を備えること
を特徴とする並走経路報知システム。
【請求項9】
請求項8に記載の並走経路報知システムにおいて、
前記車両特定情報取得手段は、前記車両の周囲の画像を取得し、その取得した画像から前記車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能であることを特徴とする並走経路報知システム。
【請求項10】
請求項9に記載の並走経路報知システムにおいて、
前記車両特定情報取得手段は、前記車両の周囲の画像を取得し、その取得した画像から前記車両の周囲を走行する他の車両のナンバープレートの画像を抽出し、その抽出したナンバープレートの画像からその車両を特定するための車両特定情報を取得可能であることを特徴とする並走経路報知システム。
【請求項11】
請求項9または請求項10に記載の並走経路報知システムにおいて、
前記車両特定情報取得手段は、前記車両の周囲のうち前記車両の前方の画像を取得するよう構成されていることを特徴とする並走経路報知システム。
【請求項12】
請求項9〜請求項11の何れかに記載の並走経路報知システムにおいて、
前記車両特定情報取得手段は、前記車両の周囲のうち前記車両の後方の画像を取得するよう構成されていることを特徴とする並走経路報知システム。
【請求項13】
請求項8〜請求項12の何れかに記載の並走経路報知システムにおいて、
前記送信制御手段は、前記センタ側送受信手段が受信した車両特定情報と前記記憶手段が記憶する前記車両特定情報とが同一であると前記判断手段によって判断された場合に、その車両特定情報に関連付けられた経路情報を前記記憶手段から読み出した際に、その車両特定情報に関連付けられた経路情報が複数存在するときには、その複数の経路情報から他の車両が並走する可能性がある経路を推測し、センタ側送受信手段を制御してその推測した経路を経路情報として前記並走経路報知装置へと送信させることを特徴とする並走経路報知システム。
【請求項14】
請求項8〜請求項13の何れかに記載の並走経路報知システムにおいて、
前記並走経路報知装置は、
特定の道路区間を設定する道路区間設定手段を備え、
前記車両特定情報取得手段は、前記道路区間設定手段によって設定された道路区間でのみ、車両の周囲を走行する他の車両を特定するための車両特定情報を取得すること
を特徴とする並走経路報知システム。
【請求項1】
車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能な車両特定情報取得手段と、
前記他の車両が前記車両の周囲を走行した経路に関する経路情報を取得可能な経路情報取得手段と、
前記車両特定情報および前記経路情報を関連付けて記憶可能な記憶手段と、
前記記憶手段が記憶する前記車両特定情報を参照して、前記車両特定情報取得手段によって取得された車両特定情報と前記記憶手段が記憶する前記車両特定情報とが同一であるか否かを判断する判断手段と、
前記車両特定情報取得手段によって取得された車両特定情報と前記記憶手段が記憶する前記車両特定情報とが前記判断手段によって同一ではないと判断された場合には、前記車両特定情報取得手段によって取得された車両特定情報を前記記憶手段に記憶させるとともに、前記経路情報取得手段によって取得された経路情報をその記憶させた車両特定情報と関連付けて前記記憶手段に記憶させ、一方、前記車両特定情報取得手段によって取得された車両特定情報と前記記憶手段が記憶する前記車両特定情報とが前記判断手段によって同一であると判断された場合には、その同一であると判断された車両特定情報と前記経路情報取得手段によって取得された経路情報とを関連付けて前記記憶手段に記憶させる記憶制御手段と、
前記経路情報を報知可能な報知手段と、
前記判断手段によって前記車両特定情報取得手段によって取得された車両特定情報と前記記憶手段が記憶する前記車両特定情報とが同一であると判断された場合には、その車両特定情報に関連付けられた経路情報を前記記憶手段から読み出し、その読み出した経路情報を前記報知手段に報知させる報知制御手段と、
を備えることを特徴とする車両の並走経路報知装置。
【請求項2】
請求項1に記載の車両の並走経路報知装置において、
前記車両特定情報取得手段は、前記車両の周囲の画像を取得し、その取得した画像から前記車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能であることを特徴とする車両の並走経路報知装置。
【請求項3】
請求項2に記載の車両の並走経路報知装置において、
前記車両特定情報取得手段は、前記車両の周囲の画像を取得し、その取得した画像から前記車両の周囲を走行する他の車両のナンバープレートの画像を抽出し、その抽出したナンバープレートの画像からその車両を特定するための車両特定情報を取得可能であることを特徴とする車両の並走経路報知装置。
【請求項4】
請求項2または請求項3に記載の車両の並走経路報知装置において、
前記車両特定情報取得手段は、前記車両の周囲のうち前記車両の前方の画像を取得するよう構成されていることを特徴とする車両の並走経路報知装置。
【請求項5】
請求項2〜請求項4の何れかに記載の車両の並走経路報知装置において、
前記車両特定情報取得手段は、前記車両の周囲のうち前記車両の後方の画像を取得するよう構成されていることを特徴とする車両の並走経路報知装置。
【請求項6】
請求項1〜請求項5の何れかに記載の車両の並走経路報知装置において、
前記報知制御手段は、前記車両特定情報取得手段によって取得された車両特定情報と前記記憶手段が記憶する前記車両特定情報とが同一であると前記判断手段によって判断された場合に、その車両特定情報に関連付けられた経路情報を前記記憶手段から読み出した際に、その車両特定情報に関連付けられた経路情報が複数存在するときには、その複数の経路情報から他の車両が並走する可能性がある経路を推測し、その推測した経路を経路情報として前記報知手段に報知させることを特徴とする車両の並走経路報知装置。
【請求項7】
請求項1〜請求項6の何れかに記載の車両の並走経路報知装置において、
特定の道路区間を設定する道路区間設定手段を備え、
前記車両特定情報取得手段は、前記道路区間設定手段によって設定された道路区間でのみ、車両の周囲を走行する他の車両を特定するための車両特定情報を取得すること
を特徴とする車両の並走経路報知装置。
【請求項8】
車両の周囲を走行する他の車両が以前並走したことがある車両である場合には並走した経路を報知する並走経路報知装置と、情報センタと、を備え、前記並走経路報知装置と前記情報センタとが通信網を介して通信可能に構成された並走経路報知システムであって、
前記並走経路報知装置は、
車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能な車両特定情報取得手段と、
前記他の車両が前記車両の周囲を走行した経路に関する経路情報を取得可能な経路情報取得手段と、
前記情報センタとの間で各種データを送受信可能な装置側送受信手段と、
前記装置側送受信手段を介して前記車両特定情報および前記経路情報を前記情報センタへ送信させる装置側送信制御手段と、
を備え、
前記情報センタは、
前記並走経路報知装置との間で各種データを送受信可能なセンタ側送受信手段と、
前記センタ側送受信手段が受信した前記車両特定情報および前記経路情報を関連付けて記憶可能な記憶手段と、
前記記憶手段が記憶する前記車両特定情報を参照して、前記センタ側送受信手段が受信した車両特定情報と前記記憶手段が記憶する前記車両特定情報とが同一であるか否かを判断する判断手段と、
前記センタ側送受信手段が受信した車両特定情報と前記記憶手段が記憶する前記車両特定情報とが前記判断手段によって同一ではないと判断された場合には、前記センタ側送受信手段が受信した車両特定情報を前記記憶手段に記憶させるとともに、前記センタ側送受信手段が受信した経路情報をその記憶させた車両特定情報と関連付けて前記記憶手段に記憶させ、一方、前記センタ側送受信手段が受信した車両特定情報と前記記憶手段が記憶する前記車両特定情報とが前記判断手段によって同一であると判断された場合には、その同一であると判断された車両特定情報と前記センタ側送受信手段が受信した経路情報とを関連付けて前記記憶手段に記憶させる記憶制御手段と、
前記センタ側送受信手段が受信した車両特定情報と前記記憶手段が記憶する前記車両特定情報とが同一であると前記判断手段によって判断された場合には、その車両特定情報に関連付けられた経路情報を前記記憶手段から読み出し、前記センタ側送受信手段を制御してその読み出した経路情報を前記並走経路報知装置へと送信させるセンタ側送信制御手段と、
を備え、
前記並走経路報知装置は、
前記経路情報を報知可能な報知手段と、
前記装置側送受信手段が受信した経路情報を前記報知手段に報知させる報知制御手段と、を備えること
を特徴とする並走経路報知システム。
【請求項9】
請求項8に記載の並走経路報知システムにおいて、
前記車両特定情報取得手段は、前記車両の周囲の画像を取得し、その取得した画像から前記車両の周囲を走行する他の車両を特定するための車両特定情報を取得可能であることを特徴とする並走経路報知システム。
【請求項10】
請求項9に記載の並走経路報知システムにおいて、
前記車両特定情報取得手段は、前記車両の周囲の画像を取得し、その取得した画像から前記車両の周囲を走行する他の車両のナンバープレートの画像を抽出し、その抽出したナンバープレートの画像からその車両を特定するための車両特定情報を取得可能であることを特徴とする並走経路報知システム。
【請求項11】
請求項9または請求項10に記載の並走経路報知システムにおいて、
前記車両特定情報取得手段は、前記車両の周囲のうち前記車両の前方の画像を取得するよう構成されていることを特徴とする並走経路報知システム。
【請求項12】
請求項9〜請求項11の何れかに記載の並走経路報知システムにおいて、
前記車両特定情報取得手段は、前記車両の周囲のうち前記車両の後方の画像を取得するよう構成されていることを特徴とする並走経路報知システム。
【請求項13】
請求項8〜請求項12の何れかに記載の並走経路報知システムにおいて、
前記送信制御手段は、前記センタ側送受信手段が受信した車両特定情報と前記記憶手段が記憶する前記車両特定情報とが同一であると前記判断手段によって判断された場合に、その車両特定情報に関連付けられた経路情報を前記記憶手段から読み出した際に、その車両特定情報に関連付けられた経路情報が複数存在するときには、その複数の経路情報から他の車両が並走する可能性がある経路を推測し、センタ側送受信手段を制御してその推測した経路を経路情報として前記並走経路報知装置へと送信させることを特徴とする並走経路報知システム。
【請求項14】
請求項8〜請求項13の何れかに記載の並走経路報知システムにおいて、
前記並走経路報知装置は、
特定の道路区間を設定する道路区間設定手段を備え、
前記車両特定情報取得手段は、前記道路区間設定手段によって設定された道路区間でのみ、車両の周囲を走行する他の車両を特定するための車両特定情報を取得すること
を特徴とする並走経路報知システム。
【図2】


【図3】
【図4】
【図6】

【図7】
【図8】

【図1】
【図5】
【図9】
【図3】
【図4】
【図6】
【図7】
【図8】
【図1】
【図5】
【図9】
【公開番号】特開2007−133598(P2007−133598A)
【公開日】平成19年5月31日(2007.5.31)
【国際特許分類】
【出願番号】特願2005−325189(P2005−325189)
【出願日】平成17年11月9日(2005.11.9)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成19年5月31日(2007.5.31)
【国際特許分類】
【出願日】平成17年11月9日(2005.11.9)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]