
車両の位置を決定するシステム、このシステムを備えた車両及びその方法
車両の位置を決定するシステムは、磁石の磁界強度を測定する複数のセンサと、複数のセンサに対する磁石の位置を決定する演算手段とからなり、複数のセンサは2次元アレイで配置されている。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は車両の位置を決定するシステムに関する。
また本発明はそのようなシステムからなる車両に関する。
さらに本発明は車両の位置を決定する方法に関する。
【背景技術】
【0002】
車両の位置を決定するシステムは長年知られている。そのような公知のシステムは、車両が移動する面に設けられた格子状の磁石を利用している。このシステムは、磁界の強度を検出することができる複数のセンサからなる。複数のセンサは、車両が磁石を通過したときに地面に配置された磁石が検出されるのを保証するために、車両の横方向に配置されている。センサからの信号は、定期的に抽出され、演算手段に提供され、センサに対する検出された磁石の位置を演算する。個々の磁石は通常お互いに区別できないので、この磁石の検出は位置を決定するのに十分ではない。したがって、従来のあるシステムでは、位置変化とともに位置を決定するために、回転カウンタが少なくとも2つの車輪に設置され、車輪の回転を追跡している。磁石の検出は、位置の決定における誤差の累積、及び位置のドリフトの発生を防止している。
【0003】
この公知のシステムの欠点は、車両がカーブを曲がるとき、カーブの外側のセンサが磁界強度を不十分に抽出する一方、カーブの内側のセンサは磁界強度を過剰に抽出することである。後者は、現在のデジタル信号プロセッサに利用できる処理能力の問題が少ないが、前者は車両がカーブを曲がるときの決定位置の精度の低下を生じる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の目的は、車両がカーブを曲がるときの精度の低下が前記従来の技術に比べて実質的に少ない車両の位置を決定するシステムを提供することである。
【課題を解決するための手段】
【0005】
この目的は、車両の位置を決定するシステムにおいて、磁石の磁界強度を測定する複数のセンサと、前記複数のセンサに対する前記磁石の位置を決定する演算手段とからなり、
前記複数のセンサは2次元アレイで配置されているシステムを提供することにより、本発明により実現される。
【0006】
従来技術によるシステムでは、センサからのサンプルの取得は時間内に行われ、空間領域におけるサンプルの位置は車両の移動に依存し、車両の移動により変化する。本発明の実施形態では、複数のセンサは、磁石が車両の中心から外れたラインの下を通過したときに磁石を外すのを防止するのに単独ではもはや役立たないが、磁石の磁界の2次元空間でスナップをとるのに役立つ。このため、システムが使用中であるとき、センサのアレイが磁石を含む面に実質的に平行に配置されることが好ましい。センサに対する磁石の位置を決定するこの方法は、時間に関連した抽出率及び車両の移動に依存しないが、センサの配置のみに依存する。なぜなら、位置の決定は車両の移動と無関係であり、決定位置の精度は車両の移動と無関係だからである。このため、実質的に直線的に移動するときだけでなく、カーブを曲がるときでも、抽出不足や抽出過剰は生じない。(信号位置を決定する)精度はセンサの配置によって決まる。
【0007】
更なる実施形態では、本発明は、前記センサは2次元に均一に設置されているシステムを提供する。このように、サンプルは均一に配置されている。
【0008】
他の実施形態によると、前記複数のセンサで測定された磁界強度を磁石の磁界の空間モデルに適合させる手段をさらに有するシステムが提供される。演算的に高価であるが、取得磁界強度を磁石の空間モデルに適合させる結果、高精度の位置が得られる。
【0009】
さらなる実施形態では、本発明は、前記複数のセンサが配置されている面に垂直な磁界成分に対する感度は、前記面に平行な磁界成分に対する感度よりも実質的に高いシステムを提供する。この垂直成分は地面と接する車両の典型的な行動半径内で一定とみなすことができるので、このような実施形態は、地球の磁界における空間的変動による誤差が最小化されるという利点を有する。さらなる実施形態では、システムは、一定の背景磁界(background magnetic field)を推定し、この一定の背景磁界に対する磁石の測定中に補正する。この背景磁界は、車両自身の成分だけでなく、地球の測定磁界の残りの垂直成分
により生じる磁界を構成してもよい。
【0010】
また、さらなる実施形態では、本発明は、前述のシステムを備える車両を提供する。
【0011】
さらなる実施形態では、システムは、複数の磁石の位置がセンサの2次元アレイによる単一の測定から決定されるように、配置される。この特徴が有利であるためには、地面の磁石は、アレイが複数の磁石の磁界の少なくとも一部を検出するのに十分に接近して配置される。
【0012】
また、さらなる実施形態では、前記システムは、地面にある磁気群の相互配置、及び/又は磁気群の個々の磁石の極性により符号化された情報を復号化するように、配置されている。このために、磁石は群を成して配置することが好ましい。ここで、各群の磁石は位置情報を提供し、又は前述した実施形態に類似する位置情報を引き出すために、群内の磁石の配置及び/又は群内の極性は、追加の情報、追加の位置情報、又は非位置情報のいずれかを提供する。ある特別な実施形態では、位置座標は、相互配置(mutual arrangement)で直接的に符号化される。しかし、好ましい代案の実施形態では、相互配置は、車両に記憶されている参照テーブル(lookup table)のキーを符号化する。
本発明の他の特徴によると、車両の位置を決定する方法において、複数のセンサから該センサで測定された磁界強度を取得する工程と、前記複数のセンサに対する検出磁石の位置を決定する工程とからなり、前記複数のセンサは2次元領域に配置されている方法が提供されている。
【0013】
本発明の他の特徴によると、前記検出磁石の位置は、取得磁界強度を磁石の磁界の空間モデルに適合させることにより決定される方法が提供される。
【図面の簡単な説明】
【0014】
さらなる実施形態及びその利点を以下の添付図面を参照して説明する。
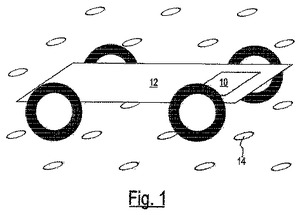
【図1】本発明による車両を示す。
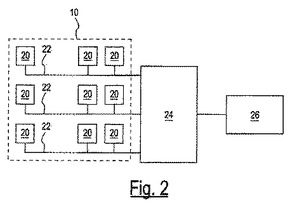
【図2】図1の車両に含まれる本発明によるシステムを示す。
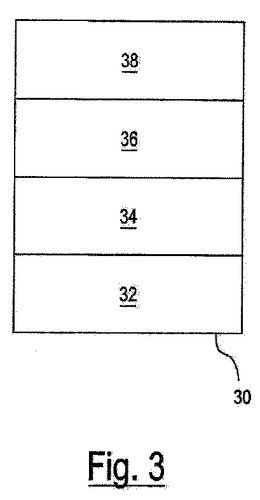
【図3】本発明によるシステムにより生成されるデータ処理の階層を示す。
【発明を実施するための形態】
【0015】
車両12(図1)が走行するのに適した地面には、磁気マーカ要素14が備えられている。車両12は複数の磁気センサ20(図2)を含み、該磁気センサ20は2次元に配置され、磁気センサアレイ10を形成している。
【0016】
磁気マーカ要素14が、ある最小数のセンサ20の下を通過すると、磁気マーカ要素14に対する車両の位置が測定される。センサの必要最小数は、例えばフィッシャーインフォメーションマトリックス(Fisher Information Matrix)により得ることができる。磁気マーカ要素14により発生する磁界は、1またはそれ以上の磁気センサ20で検出される。磁気センサ20はデジタル処理プロセッサ(DSP)24に接続されている。DSP24は、磁気センサ20からくる信号を磁気マーカ要素14の磁界の3次元モデルに適合させる。適合モデルから、磁気マーカ要素14の位置が磁気センサアレイ10に対して得られる。その結果、既知の磁気マーカ要素14の位置から車両12の位置が得られる。これは、ナビゲーションコンピュータ26により行われる。
【0017】
磁気マーカ要素14の位置は、図1に格子状パターンで示されている。本発明では、磁気マーカ要素14のパターンは格子状である必要はない。磁気マーカ要素14の位置が既知であれば十分である。図1の格子状パターンのような規則パターンが有利である。パターンから位置を容易に引き出せるので、個々のマーカ要素の位置を記憶する必要がないからである。ある特別な実施形態では、車両は所定の通路に沿って進行し、格子は該所定の通路に沿って延びる1次元格子である。
【0018】
磁気センサ20のパターンは、特定のパターンに制約されない、原則として、位置推定アルゴリズムがアレイ内の個々の磁気センサ20の位置を考慮する限り、パターンはランダムにすることができる。
【0019】
DSP24とナビゲーションコンピュータ26により与えられる階層機能性30は、以下の通りである(図3)。最下位はIOレベル32である。IOレベル32は、センサ20から磁界強度読み出し値を得る責任を負う。
【0020】
次のレベルであるスキャナ(scanner)レベル34では、センサ20のアレイ10内の位置が個々の磁界強度測定値と関連している。これらの位置は2次元に固定され、時間はもはや役割りを果たさないので、1次元で磁気センサを利用している従来の技術からの形態と比べてむしろ簡単である。
【0021】
次に、磁界強度の位置の組は、フィッター(fitter)レベル36で、磁気マーカ要素14の3次元モデルに適合される。この結果、磁気マーカ要素14の位置がセンサ20のアレイ10に対して推定される。
【0022】
最後に、磁気マーカ要素14の推定相対位置は、最後のレベルであるコーディング(coding)レベル38で、車両12の位置を決定するのに使用される。ある特別な実施形態では、位置は特定の時間的瞬間、例えば時間同期信号の発生からの経過時間に関係する。
【0023】
図示し説明した実施形態は本発明の例示的形態としてのみ役立ち、本発明はこれらの実施形態に限定されないことに注意すべきである。本発明の範囲から逸脱することなく、図示し説明した実施形態の多くの修正や変形が可能である。例えば、図示し説明した実施形態を組み合わせることも制限なく可能である。したがって、求める保護の範囲は特許請求の範囲によってのみ決定される。
【符号の説明】
【0024】
10 磁気センサアレイ
12 車両
14 磁気マーカ要素
20 磁気センサ
24 デジタル処理プロセッサ
26 ナビゲーションコンピュータ
30 階層機能性
32 IOレベル
34 スキャナレベル
36 フィッターレベル
38 コーディングレベル
【技術分野】
【0001】
本発明は車両の位置を決定するシステムに関する。
また本発明はそのようなシステムからなる車両に関する。
さらに本発明は車両の位置を決定する方法に関する。
【背景技術】
【0002】
車両の位置を決定するシステムは長年知られている。そのような公知のシステムは、車両が移動する面に設けられた格子状の磁石を利用している。このシステムは、磁界の強度を検出することができる複数のセンサからなる。複数のセンサは、車両が磁石を通過したときに地面に配置された磁石が検出されるのを保証するために、車両の横方向に配置されている。センサからの信号は、定期的に抽出され、演算手段に提供され、センサに対する検出された磁石の位置を演算する。個々の磁石は通常お互いに区別できないので、この磁石の検出は位置を決定するのに十分ではない。したがって、従来のあるシステムでは、位置変化とともに位置を決定するために、回転カウンタが少なくとも2つの車輪に設置され、車輪の回転を追跡している。磁石の検出は、位置の決定における誤差の累積、及び位置のドリフトの発生を防止している。
【0003】
この公知のシステムの欠点は、車両がカーブを曲がるとき、カーブの外側のセンサが磁界強度を不十分に抽出する一方、カーブの内側のセンサは磁界強度を過剰に抽出することである。後者は、現在のデジタル信号プロセッサに利用できる処理能力の問題が少ないが、前者は車両がカーブを曲がるときの決定位置の精度の低下を生じる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の目的は、車両がカーブを曲がるときの精度の低下が前記従来の技術に比べて実質的に少ない車両の位置を決定するシステムを提供することである。
【課題を解決するための手段】
【0005】
この目的は、車両の位置を決定するシステムにおいて、磁石の磁界強度を測定する複数のセンサと、前記複数のセンサに対する前記磁石の位置を決定する演算手段とからなり、
前記複数のセンサは2次元アレイで配置されているシステムを提供することにより、本発明により実現される。
【0006】
従来技術によるシステムでは、センサからのサンプルの取得は時間内に行われ、空間領域におけるサンプルの位置は車両の移動に依存し、車両の移動により変化する。本発明の実施形態では、複数のセンサは、磁石が車両の中心から外れたラインの下を通過したときに磁石を外すのを防止するのに単独ではもはや役立たないが、磁石の磁界の2次元空間でスナップをとるのに役立つ。このため、システムが使用中であるとき、センサのアレイが磁石を含む面に実質的に平行に配置されることが好ましい。センサに対する磁石の位置を決定するこの方法は、時間に関連した抽出率及び車両の移動に依存しないが、センサの配置のみに依存する。なぜなら、位置の決定は車両の移動と無関係であり、決定位置の精度は車両の移動と無関係だからである。このため、実質的に直線的に移動するときだけでなく、カーブを曲がるときでも、抽出不足や抽出過剰は生じない。(信号位置を決定する)精度はセンサの配置によって決まる。
【0007】
更なる実施形態では、本発明は、前記センサは2次元に均一に設置されているシステムを提供する。このように、サンプルは均一に配置されている。
【0008】
他の実施形態によると、前記複数のセンサで測定された磁界強度を磁石の磁界の空間モデルに適合させる手段をさらに有するシステムが提供される。演算的に高価であるが、取得磁界強度を磁石の空間モデルに適合させる結果、高精度の位置が得られる。
【0009】
さらなる実施形態では、本発明は、前記複数のセンサが配置されている面に垂直な磁界成分に対する感度は、前記面に平行な磁界成分に対する感度よりも実質的に高いシステムを提供する。この垂直成分は地面と接する車両の典型的な行動半径内で一定とみなすことができるので、このような実施形態は、地球の磁界における空間的変動による誤差が最小化されるという利点を有する。さらなる実施形態では、システムは、一定の背景磁界(background magnetic field)を推定し、この一定の背景磁界に対する磁石の測定中に補正する。この背景磁界は、車両自身の成分だけでなく、地球の測定磁界の残りの垂直成分
により生じる磁界を構成してもよい。
【0010】
また、さらなる実施形態では、本発明は、前述のシステムを備える車両を提供する。
【0011】
さらなる実施形態では、システムは、複数の磁石の位置がセンサの2次元アレイによる単一の測定から決定されるように、配置される。この特徴が有利であるためには、地面の磁石は、アレイが複数の磁石の磁界の少なくとも一部を検出するのに十分に接近して配置される。
【0012】
また、さらなる実施形態では、前記システムは、地面にある磁気群の相互配置、及び/又は磁気群の個々の磁石の極性により符号化された情報を復号化するように、配置されている。このために、磁石は群を成して配置することが好ましい。ここで、各群の磁石は位置情報を提供し、又は前述した実施形態に類似する位置情報を引き出すために、群内の磁石の配置及び/又は群内の極性は、追加の情報、追加の位置情報、又は非位置情報のいずれかを提供する。ある特別な実施形態では、位置座標は、相互配置(mutual arrangement)で直接的に符号化される。しかし、好ましい代案の実施形態では、相互配置は、車両に記憶されている参照テーブル(lookup table)のキーを符号化する。
本発明の他の特徴によると、車両の位置を決定する方法において、複数のセンサから該センサで測定された磁界強度を取得する工程と、前記複数のセンサに対する検出磁石の位置を決定する工程とからなり、前記複数のセンサは2次元領域に配置されている方法が提供されている。
【0013】
本発明の他の特徴によると、前記検出磁石の位置は、取得磁界強度を磁石の磁界の空間モデルに適合させることにより決定される方法が提供される。
【図面の簡単な説明】
【0014】
さらなる実施形態及びその利点を以下の添付図面を参照して説明する。
【図1】本発明による車両を示す。
【図2】図1の車両に含まれる本発明によるシステムを示す。
【図3】本発明によるシステムにより生成されるデータ処理の階層を示す。
【発明を実施するための形態】
【0015】
車両12(図1)が走行するのに適した地面には、磁気マーカ要素14が備えられている。車両12は複数の磁気センサ20(図2)を含み、該磁気センサ20は2次元に配置され、磁気センサアレイ10を形成している。
【0016】
磁気マーカ要素14が、ある最小数のセンサ20の下を通過すると、磁気マーカ要素14に対する車両の位置が測定される。センサの必要最小数は、例えばフィッシャーインフォメーションマトリックス(Fisher Information Matrix)により得ることができる。磁気マーカ要素14により発生する磁界は、1またはそれ以上の磁気センサ20で検出される。磁気センサ20はデジタル処理プロセッサ(DSP)24に接続されている。DSP24は、磁気センサ20からくる信号を磁気マーカ要素14の磁界の3次元モデルに適合させる。適合モデルから、磁気マーカ要素14の位置が磁気センサアレイ10に対して得られる。その結果、既知の磁気マーカ要素14の位置から車両12の位置が得られる。これは、ナビゲーションコンピュータ26により行われる。
【0017】
磁気マーカ要素14の位置は、図1に格子状パターンで示されている。本発明では、磁気マーカ要素14のパターンは格子状である必要はない。磁気マーカ要素14の位置が既知であれば十分である。図1の格子状パターンのような規則パターンが有利である。パターンから位置を容易に引き出せるので、個々のマーカ要素の位置を記憶する必要がないからである。ある特別な実施形態では、車両は所定の通路に沿って進行し、格子は該所定の通路に沿って延びる1次元格子である。
【0018】
磁気センサ20のパターンは、特定のパターンに制約されない、原則として、位置推定アルゴリズムがアレイ内の個々の磁気センサ20の位置を考慮する限り、パターンはランダムにすることができる。
【0019】
DSP24とナビゲーションコンピュータ26により与えられる階層機能性30は、以下の通りである(図3)。最下位はIOレベル32である。IOレベル32は、センサ20から磁界強度読み出し値を得る責任を負う。
【0020】
次のレベルであるスキャナ(scanner)レベル34では、センサ20のアレイ10内の位置が個々の磁界強度測定値と関連している。これらの位置は2次元に固定され、時間はもはや役割りを果たさないので、1次元で磁気センサを利用している従来の技術からの形態と比べてむしろ簡単である。
【0021】
次に、磁界強度の位置の組は、フィッター(fitter)レベル36で、磁気マーカ要素14の3次元モデルに適合される。この結果、磁気マーカ要素14の位置がセンサ20のアレイ10に対して推定される。
【0022】
最後に、磁気マーカ要素14の推定相対位置は、最後のレベルであるコーディング(coding)レベル38で、車両12の位置を決定するのに使用される。ある特別な実施形態では、位置は特定の時間的瞬間、例えば時間同期信号の発生からの経過時間に関係する。
【0023】
図示し説明した実施形態は本発明の例示的形態としてのみ役立ち、本発明はこれらの実施形態に限定されないことに注意すべきである。本発明の範囲から逸脱することなく、図示し説明した実施形態の多くの修正や変形が可能である。例えば、図示し説明した実施形態を組み合わせることも制限なく可能である。したがって、求める保護の範囲は特許請求の範囲によってのみ決定される。
【符号の説明】
【0024】
10 磁気センサアレイ
12 車両
14 磁気マーカ要素
20 磁気センサ
24 デジタル処理プロセッサ
26 ナビゲーションコンピュータ
30 階層機能性
32 IOレベル
34 スキャナレベル
36 フィッターレベル
38 コーディングレベル
【特許請求の範囲】
【請求項1】
車両の位置を決定するシステムにおいて、
磁石の磁界強度を測定する複数のセンサと、
前記複数のセンサに対する前記磁石の位置を決定する演算手段とからなり、
前記複数のセンサは2次元アレイで配置されているシステム。
【請求項2】
前記センサは2次元に均一に設置されている請求項1に記載のシステム。
【請求項3】
前記複数のセンサで測定された磁界強度を磁石の磁界の空間モデルに適合させる手段をさらに有する請求項1又は2に記載のシステム。
【請求項4】
前記複数のセンサが配置されている面に垂直な磁界成分に対する感度は、前記面に平行な磁界成分に対する感度よりも実質的に高い請求項1,2又は3のいずれかに記載のシステム。
【請求項5】
前記システムは、地面にある磁気群の相互配置、及び/又は磁気群の個々の磁石の極性により符号化された情報を復号化するように、配置されている請求項1−4のいずれかに記載のシステム。
【請求項6】
請求項1−5のいずれかに記載のシステムを有する車両。
【請求項7】
車両の位置を決定する方法において、
複数のセンサから該センサで測定された磁界強度を取得する工程と、
前記複数のセンサに対する検出磁石の位置を決定する工程とからなり、
前記複数のセンサは2次元領域に配置されている方法。
【請求項8】
前記検出磁石の位置は、取得磁界強度を磁石の磁界の空間モデルに適合させることにより決定される請求項7に記載の方法。
【請求項1】
車両の位置を決定するシステムにおいて、
磁石の磁界強度を測定する複数のセンサと、
前記複数のセンサに対する前記磁石の位置を決定する演算手段とからなり、
前記複数のセンサは2次元アレイで配置されているシステム。
【請求項2】
前記センサは2次元に均一に設置されている請求項1に記載のシステム。
【請求項3】
前記複数のセンサで測定された磁界強度を磁石の磁界の空間モデルに適合させる手段をさらに有する請求項1又は2に記載のシステム。
【請求項4】
前記複数のセンサが配置されている面に垂直な磁界成分に対する感度は、前記面に平行な磁界成分に対する感度よりも実質的に高い請求項1,2又は3のいずれかに記載のシステム。
【請求項5】
前記システムは、地面にある磁気群の相互配置、及び/又は磁気群の個々の磁石の極性により符号化された情報を復号化するように、配置されている請求項1−4のいずれかに記載のシステム。
【請求項6】
請求項1−5のいずれかに記載のシステムを有する車両。
【請求項7】
車両の位置を決定する方法において、
複数のセンサから該センサで測定された磁界強度を取得する工程と、
前記複数のセンサに対する検出磁石の位置を決定する工程とからなり、
前記複数のセンサは2次元領域に配置されている方法。
【請求項8】
前記検出磁石の位置は、取得磁界強度を磁石の磁界の空間モデルに適合させることにより決定される請求項7に記載の方法。
【図1】

【図2】
【図3】
【図2】
【図3】
【公表番号】特表2013−519892(P2013−519892A)
【公表日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2012−553337(P2012−553337)
【出願日】平成23年2月21日(2011.2.21)
【国際出願番号】PCT/EP2011/052489
【国際公開番号】WO2011/101462
【国際公開日】平成23年8月25日(2011.8.25)
【出願人】(512216230)トゥ・ゲットゼア・ベスローテン・フェンノートシャップ (1)
【氏名又は名称原語表記】2 GETTHERE B.V.
【Fターム(参考)】
【公表日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年2月21日(2011.2.21)
【国際出願番号】PCT/EP2011/052489
【国際公開番号】WO2011/101462
【国際公開日】平成23年8月25日(2011.8.25)
【出願人】(512216230)トゥ・ゲットゼア・ベスローテン・フェンノートシャップ (1)
【氏名又は名称原語表記】2 GETTHERE B.V.
【Fターム(参考)】
[ Back to top ]