
車両の位置姿勢測定装置
【課題】車両の位置姿勢を精度良く測定する車両の位置姿勢測定装置を提供する。
【解決手段】前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、ステアリング角(θ)を検出するステアリング角検出手段(1)と、車両の前後左右四輪の車輪速(PFl,PFr,PRl,PRr)を検出する車輪速検出手段(2−5)と、前記ステアリング角検出手段からの出力に基づいて実舵角(δFl,δFr)を演算する実舵角演算手段(6)と、前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値(T†R,r†Rl,r†Rr)を演算するトレッド・車輪半径推定手段(7)と、前記推定値と後輪の前記車輪速に基づき車両の位置(x,y)および姿勢(γ)を演算する車両位置姿勢演算手段(8)と、を備え、任意の慣性座標系に対する車両の位置および姿勢を測定する。
【解決手段】前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、ステアリング角(θ)を検出するステアリング角検出手段(1)と、車両の前後左右四輪の車輪速(PFl,PFr,PRl,PRr)を検出する車輪速検出手段(2−5)と、前記ステアリング角検出手段からの出力に基づいて実舵角(δFl,δFr)を演算する実舵角演算手段(6)と、前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値(T†R,r†Rl,r†Rr)を演算するトレッド・車輪半径推定手段(7)と、前記推定値と後輪の前記車輪速に基づき車両の位置(x,y)および姿勢(γ)を演算する車両位置姿勢演算手段(8)と、を備え、任意の慣性座標系に対する車両の位置および姿勢を測定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、任意の慣性座標系における車両の位置・姿勢を測定するための車両の位置姿勢測定装置に関するものである。
【背景技術】
【0002】
従来の車両の位置姿勢測定装置では、車輪径が変化しないと仮定して非操舵左右輪の回転数から求めた移動距離差および平均移動距離と、さらにトレッドも変化しないとする仮定により、車両の位置および姿勢を測定していた(例えば特許文献1、非特許文献1)。
さらに、車輪の回転数の合計および/または二つの車輪の回転数差および/または車輪の所定の回転に対する時間ないし回転状態もしくは回転状態に達するまでの時間に依存した補正係数を導入することにより、カーブ走行中などに生じるトレッドの変化に対応した位置姿勢測定方式も提案されている(例えば特許文献2)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開昭61−274214号公報
【特許文献2】特表昭59−502153号公報
【非特許文献】
【0004】
【非特許文献1】C. Ming Wang著、”Location Estimation and Uncertainty Analysis for Mobile Robots”、IEEE International Conference on Robotics and Automation、pp.1230-1235, 1988(第2節)
【非特許文献2】馬屋原将明 他著、”非線形逐次最小2乗法に基づく耐クロストークノイズキャンセラ”、電子情報通信学会論文誌A、pp.162−169、2002」
【非特許文献3】谷萩隆嗣 著、”カルマンフィルタと適応信号処理”、pp.42−51、コロナ社、2005年12月
【発明の概要】
【発明が解決しようとする課題】
【0005】
このような車両の位置姿勢測定装置では、タイヤ空気圧の左右差などを要因として、非操舵左右輪の有効径に差異がある場合に、左右輪の移動距離演算に誤差が生じ、その結果位置・姿勢の測定精度が悪化するという問題点があった。
【0006】
この発明は、上記のような問題点を解決するためになされたものであり、車両の位置姿勢を精度良く測定する車両の位置姿勢測定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
この発明は、前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、ステアリング角を検出するステアリング角検出手段と、車両の前後左右四輪の車輪速を検出する車輪速検出手段と、前記ステアリング角検出手段からの出力に基づいて実舵角を演算する実舵角演算手段と、前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値を演算するトレッド・車輪半径推定手段と、前記推定値と後輪の前記車輪速に基づき車両の位置および姿勢を演算する車両位置姿勢演算手段と、を備え、任意の慣性座標系に対する車両の位置および姿勢を測定することを特徴とする車両の位置姿勢測定装置等にある。
【発明の効果】
【0008】
この発明によれば、前記トレッド・車輪半径推定手段を備えたことにより、走行中にリアトレッドが変化した場合だけでなく、タイヤ空気圧の減少などによって車輪径が変化した場合でも、車両の位置および姿勢を高精度に測定できる。
【図面の簡単な説明】
【0009】
【図1】この発明の実施の形態1による車両の位置姿勢測定装置の構成図である。
【図2】この発明の原理を説明するための説明図である。
【図3】この発明の実施の形態2による車両の位置姿勢測定装置の構成図である。
【発明を実施するための形態】
【0010】
以下、この発明による車両の位置姿勢測定装置を各実施の形態に従って図面を用いて説明する。なお、各実施の形態においては、前輪を操舵する車両の位置姿勢測定を行う装置の例を示しており、また同一もしくは相当部分は同一符号で示し、重複する説明は省略する。
【0011】
実施の形態1.
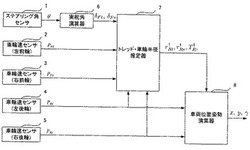
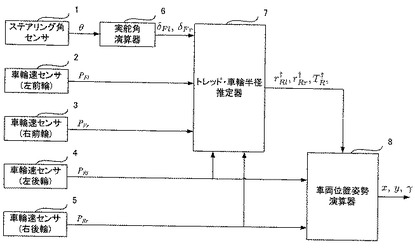
図1はこの発明の実施の形態1による車両の位置姿勢測定装置の構成図である。この車両の位置姿勢測定装置は、ステアリング角θを検出するためのステアリング角センサ1と、車両の各車輪の車輪速を検出するために車輪速センサ2(左前輪),車輪速センサ3(右前輪),車輪速センサ4(左後輪),車輪速センサ5(右後輪)を有している。車輪速センサ2,3,4,5は、それぞれ対応する車輪が所定角度回転する毎に検出パルスを出力する公知の構成の車輪速センサである。
【0012】
実舵角演算器6は、ステアリング角センサ1により検出されたステアリング角θを予め実験によって求めた関係式(1)に代入し、実舵角δFl,δFrを演算する。
【0013】
【数1】

【0014】
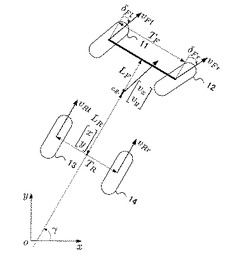
トレッド・車輪半径推定器7は、実舵角演算器6から出力される実舵角δFl,δFrと車輪速センサ2,3,4,5からそれぞれ出力される各パルス信号PFl,PFr,PRl,PRrから、フロントトレッドTR,リアトレッドTR,左前車輪半径rFl,右前車輪半径rFr,左後車輪半径rRl,右後車輪半径rRrを推定する。図2を参照しながら、その原理を説明する。車両の左前車輪11,右前車輪12,左後車輪13,右後車輪14の横滑り角が全て0であると仮定すると、
【0015】
【数2】
【0016】
が成り立つ。ただし、
vFl,vFr,vRl,vRr:それぞれ車輪11,12,13,14の移動速度
vx,vy:それぞれ重心速度のx軸成分,y軸成分(慣性座標系は任意)
(ドット)γ:車両の姿勢角(ヨー角:基準座標xy上の車両方向のx軸とのなす角度)γの単位時間当たりの変化量(角速度)
LF:前輪軸中心(左前車輪11と右前車輪12を結ぶ線の中心)と車両重心c.g.との間の長さ
LR:後輪軸中心(左後車輪13と右後車輪14を結ぶ線の中心)と車両重心c.g.との間の長さ
である。例えば、後退駐車時のように、車両が低速で定常運動を行なっていると考えられる場合においては、このような仮定が成立する。
【0017】
さらに、上式を整理すると、
【0018】
【数3】
【0019】
が得られる。Lはホイルベースを示す。ところで、各車輪速センサ2,3,4,5からの出力パルス数PFl,PFr,PRl,PRrと各車輪11,12,13,14の移動速度vFl,vFr,vRl,vRrとの間には、関係式
【0020】
【数4】
【0021】
が成り立つ。ただし、NFl,NFr,NRl,NRrは各車輪が1回転したときのパルス数であり、Tはサンプリング時間、nは正の整数、である。したがって、ここで考えている定常運動状態では、操舵速度は十分小さいので、
【0022】
【数5】
【0023】
と仮定できるので((ドット)δFl,(ドット)δFrはそれぞれ実舵角δFl,δFrの単位時間当たりの変化量(実舵角速度))、(9),(10)より、
【0024】
【数6】
【0025】
が成り立つ。そこで、この関係式(12)から、車輪半径およびトレッドの走行中の実際の値である真値とメーカが公表しているノミナル値(公称値)との誤差量が満たす関係式を導出し、その関係式に対して非線形逐次最小二乗法、拡張カルマンフィルタなどを用いたパラメータ推定手法を適用することで、実舵角δFl,δFrとパルス数PFl,PFr,PRl,PRrから、ノミナル値に誤差補正を加えた車輪半径およびトレッドの推定値を得ることができる。
【0026】
例えば、車輪半径およびトレッドの真値rFl,rFr,rRl,rRr,TF,TRは、ノミナル値r*Fl,r*Fr,r*Rl,r*Rr,T*F,T*Rとスケールファクタ誤差ΔrFl,ΔrFr,ΔrRl,ΔrRr,ΔTF,ΔTRを用いて、
【0027】
【数7】
【0028】
と表現できるので、関係式(13)を関係式(12)に代入することにより、誤差量ΔrFl,ΔrFr,ΔrRl,ΔrRr,ΔTF,ΔTRが満たすべき関係式が得られる。なお、非線形逐次最小二乗法および拡張カルマンフィルタについては、それぞれ上記非特許文献2,3などを参照のこと。
【0029】
車両位置姿勢演算器8は、トレッド・車輪半径推定器7から出力される後輪(左後、右後)車輪半径およびリアトレッドの推定値rRl†,rRr†,TR†と、後輪(左後、右後)の車輪速センサ4,5からそれぞれ出力される各パルス信号PRl,PRrから、車両の平面位置および姿勢を演算する。図2を参照しながら、その原理を説明する。車両の運動学的モデルより、後輪軸中心の位置x,yは関係式
【0030】
【数8】
【0031】
を満たす((ドット)x,(ドット)yはx,y座標の値の単位時間当たりの変化量)。そこで、関係式(6),(7)を関係式(14)に代入して得られる関係式および関係式(6)をサンプリング時間T(0<T<<1)で離散近似すると、後輪軸中心の位置x(nT),y(nT)および姿勢角(ヨー角)γ(nT)が満たすべき差分方程式
【0032】
【数9】
【0033】
が得られる(上記非特許文献1参照)。ただし、
【0034】
【数10】
【0035】
である。さらに、ここで考えている定常運動状態では、車両加速度は十分小さいので、
【0036】
【数11】
【0037】
と近似できるので、関係式(10)より、
【0038】
【数12】
【0039】
が成り立つが、後輪車輪半径およびリアトレッドの真値は未知であるので、それらをトレッド・車輪半径推定器7からの出力値、すなわち後輪車輪半径およびリアトレッドの推定値rRl†,rRr†,TR†に置き換えると、関係式(19)が得られる。
【0040】
【数13】
【0041】
よって、車両運動を記述する慣性座標系の設定に応じて、初期値を適切に設定することにより、任意の慣性座標系における位置x(nT),y(nT)および姿勢角(ヨー角)γ(nT)は、後輪車輪半径およびリアトレッドの推定値rRl†,rRr†,TR†とパルス信号PRl,PRrから、関係式(15)と(19)に基づいて演算できる。
【0042】
以上のような構成によれば、トレッド・車輪半径推定器7がオンラインで車輪半径およびトレッドを推定しつつ、その結果に基づき車両位置姿勢演算器8が車両の位置および姿勢を演算するので、リアトレッドあるいは後輪車輪径が変化しノミナル値と異なるといった場合でも、車両の位置および姿勢を高精度に測定できる。
【0043】
実施の形態2.
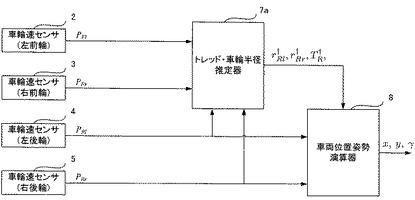
図3はこの発明の実施の形態2による車両の位置姿勢測定装置の構成図である。この装置は、車両の各車輪の車輪速を検出するための車輪速センサ(左前輪)2,車輪速センサ(右前輪)3,車輪速センサ(左後輪)4,車輪速センサ(右後輪)5以外のセンサを必要としない。この構成によれば、図1に示したステアリング角センサ1と実舵角演算器6が不要となるほか、ステアリング機構に基づく検出誤差による車両の位置姿勢測定精度の悪化が生じない。
【0044】
図3のトレッド・車輪半径推定器7aの原理を説明する。関係式(12)よりδFl,δFrを消去すると、
【0045】
【数14】
【0046】
が成り立つ。この関係式(20)から導出できる車輪半径およびトレッドの真値とノミナル値との誤差量が満たす関係式に対して、非線形逐次最小二乗法、拡張カルマンフィルタなどのパラメータ推定手法を適用すると、パルス数PFl,PFr,PRl,PRrのみから、ノミナル値に誤差補正を加えた車輪半径、またはトレッド、または車輪半径およびトレッドの両方のそれぞれ推定値を得ることができる。
【符号の説明】
【0047】
1 ステアリング角センサ(ステアリング角検出手段)、2,3,4,5 車輪速センサ(車輪速検出手段)、6 実舵角演算器(実舵角演算手段)、7,7a トレッド・車輪半径推定器(トレッド・車輪半径推定手段)、8 車両位置姿勢演算器(車両位置姿勢演算手段)、11,12,13,14 車輪。
【技術分野】
【0001】
この発明は、任意の慣性座標系における車両の位置・姿勢を測定するための車両の位置姿勢測定装置に関するものである。
【背景技術】
【0002】
従来の車両の位置姿勢測定装置では、車輪径が変化しないと仮定して非操舵左右輪の回転数から求めた移動距離差および平均移動距離と、さらにトレッドも変化しないとする仮定により、車両の位置および姿勢を測定していた(例えば特許文献1、非特許文献1)。
さらに、車輪の回転数の合計および/または二つの車輪の回転数差および/または車輪の所定の回転に対する時間ないし回転状態もしくは回転状態に達するまでの時間に依存した補正係数を導入することにより、カーブ走行中などに生じるトレッドの変化に対応した位置姿勢測定方式も提案されている(例えば特許文献2)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開昭61−274214号公報
【特許文献2】特表昭59−502153号公報
【非特許文献】
【0004】
【非特許文献1】C. Ming Wang著、”Location Estimation and Uncertainty Analysis for Mobile Robots”、IEEE International Conference on Robotics and Automation、pp.1230-1235, 1988(第2節)
【非特許文献2】馬屋原将明 他著、”非線形逐次最小2乗法に基づく耐クロストークノイズキャンセラ”、電子情報通信学会論文誌A、pp.162−169、2002」
【非特許文献3】谷萩隆嗣 著、”カルマンフィルタと適応信号処理”、pp.42−51、コロナ社、2005年12月
【発明の概要】
【発明が解決しようとする課題】
【0005】
このような車両の位置姿勢測定装置では、タイヤ空気圧の左右差などを要因として、非操舵左右輪の有効径に差異がある場合に、左右輪の移動距離演算に誤差が生じ、その結果位置・姿勢の測定精度が悪化するという問題点があった。
【0006】
この発明は、上記のような問題点を解決するためになされたものであり、車両の位置姿勢を精度良く測定する車両の位置姿勢測定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
この発明は、前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、ステアリング角を検出するステアリング角検出手段と、車両の前後左右四輪の車輪速を検出する車輪速検出手段と、前記ステアリング角検出手段からの出力に基づいて実舵角を演算する実舵角演算手段と、前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値を演算するトレッド・車輪半径推定手段と、前記推定値と後輪の前記車輪速に基づき車両の位置および姿勢を演算する車両位置姿勢演算手段と、を備え、任意の慣性座標系に対する車両の位置および姿勢を測定することを特徴とする車両の位置姿勢測定装置等にある。
【発明の効果】
【0008】
この発明によれば、前記トレッド・車輪半径推定手段を備えたことにより、走行中にリアトレッドが変化した場合だけでなく、タイヤ空気圧の減少などによって車輪径が変化した場合でも、車両の位置および姿勢を高精度に測定できる。
【図面の簡単な説明】
【0009】
【図1】この発明の実施の形態1による車両の位置姿勢測定装置の構成図である。
【図2】この発明の原理を説明するための説明図である。
【図3】この発明の実施の形態2による車両の位置姿勢測定装置の構成図である。
【発明を実施するための形態】
【0010】
以下、この発明による車両の位置姿勢測定装置を各実施の形態に従って図面を用いて説明する。なお、各実施の形態においては、前輪を操舵する車両の位置姿勢測定を行う装置の例を示しており、また同一もしくは相当部分は同一符号で示し、重複する説明は省略する。
【0011】
実施の形態1.
図1はこの発明の実施の形態1による車両の位置姿勢測定装置の構成図である。この車両の位置姿勢測定装置は、ステアリング角θを検出するためのステアリング角センサ1と、車両の各車輪の車輪速を検出するために車輪速センサ2(左前輪),車輪速センサ3(右前輪),車輪速センサ4(左後輪),車輪速センサ5(右後輪)を有している。車輪速センサ2,3,4,5は、それぞれ対応する車輪が所定角度回転する毎に検出パルスを出力する公知の構成の車輪速センサである。
【0012】
実舵角演算器6は、ステアリング角センサ1により検出されたステアリング角θを予め実験によって求めた関係式(1)に代入し、実舵角δFl,δFrを演算する。
【0013】
【数1】
【0014】
トレッド・車輪半径推定器7は、実舵角演算器6から出力される実舵角δFl,δFrと車輪速センサ2,3,4,5からそれぞれ出力される各パルス信号PFl,PFr,PRl,PRrから、フロントトレッドTR,リアトレッドTR,左前車輪半径rFl,右前車輪半径rFr,左後車輪半径rRl,右後車輪半径rRrを推定する。図2を参照しながら、その原理を説明する。車両の左前車輪11,右前車輪12,左後車輪13,右後車輪14の横滑り角が全て0であると仮定すると、
【0015】
【数2】
【0016】
が成り立つ。ただし、
vFl,vFr,vRl,vRr:それぞれ車輪11,12,13,14の移動速度
vx,vy:それぞれ重心速度のx軸成分,y軸成分(慣性座標系は任意)
(ドット)γ:車両の姿勢角(ヨー角:基準座標xy上の車両方向のx軸とのなす角度)γの単位時間当たりの変化量(角速度)
LF:前輪軸中心(左前車輪11と右前車輪12を結ぶ線の中心)と車両重心c.g.との間の長さ
LR:後輪軸中心(左後車輪13と右後車輪14を結ぶ線の中心)と車両重心c.g.との間の長さ
である。例えば、後退駐車時のように、車両が低速で定常運動を行なっていると考えられる場合においては、このような仮定が成立する。
【0017】
さらに、上式を整理すると、
【0018】
【数3】
【0019】
が得られる。Lはホイルベースを示す。ところで、各車輪速センサ2,3,4,5からの出力パルス数PFl,PFr,PRl,PRrと各車輪11,12,13,14の移動速度vFl,vFr,vRl,vRrとの間には、関係式
【0020】
【数4】
【0021】
が成り立つ。ただし、NFl,NFr,NRl,NRrは各車輪が1回転したときのパルス数であり、Tはサンプリング時間、nは正の整数、である。したがって、ここで考えている定常運動状態では、操舵速度は十分小さいので、
【0022】
【数5】
【0023】
と仮定できるので((ドット)δFl,(ドット)δFrはそれぞれ実舵角δFl,δFrの単位時間当たりの変化量(実舵角速度))、(9),(10)より、
【0024】
【数6】
【0025】
が成り立つ。そこで、この関係式(12)から、車輪半径およびトレッドの走行中の実際の値である真値とメーカが公表しているノミナル値(公称値)との誤差量が満たす関係式を導出し、その関係式に対して非線形逐次最小二乗法、拡張カルマンフィルタなどを用いたパラメータ推定手法を適用することで、実舵角δFl,δFrとパルス数PFl,PFr,PRl,PRrから、ノミナル値に誤差補正を加えた車輪半径およびトレッドの推定値を得ることができる。
【0026】
例えば、車輪半径およびトレッドの真値rFl,rFr,rRl,rRr,TF,TRは、ノミナル値r*Fl,r*Fr,r*Rl,r*Rr,T*F,T*Rとスケールファクタ誤差ΔrFl,ΔrFr,ΔrRl,ΔrRr,ΔTF,ΔTRを用いて、
【0027】
【数7】
【0028】
と表現できるので、関係式(13)を関係式(12)に代入することにより、誤差量ΔrFl,ΔrFr,ΔrRl,ΔrRr,ΔTF,ΔTRが満たすべき関係式が得られる。なお、非線形逐次最小二乗法および拡張カルマンフィルタについては、それぞれ上記非特許文献2,3などを参照のこと。
【0029】
車両位置姿勢演算器8は、トレッド・車輪半径推定器7から出力される後輪(左後、右後)車輪半径およびリアトレッドの推定値rRl†,rRr†,TR†と、後輪(左後、右後)の車輪速センサ4,5からそれぞれ出力される各パルス信号PRl,PRrから、車両の平面位置および姿勢を演算する。図2を参照しながら、その原理を説明する。車両の運動学的モデルより、後輪軸中心の位置x,yは関係式
【0030】
【数8】
【0031】
を満たす((ドット)x,(ドット)yはx,y座標の値の単位時間当たりの変化量)。そこで、関係式(6),(7)を関係式(14)に代入して得られる関係式および関係式(6)をサンプリング時間T(0<T<<1)で離散近似すると、後輪軸中心の位置x(nT),y(nT)および姿勢角(ヨー角)γ(nT)が満たすべき差分方程式
【0032】
【数9】
【0033】
が得られる(上記非特許文献1参照)。ただし、
【0034】
【数10】
【0035】
である。さらに、ここで考えている定常運動状態では、車両加速度は十分小さいので、
【0036】
【数11】
【0037】
と近似できるので、関係式(10)より、
【0038】
【数12】
【0039】
が成り立つが、後輪車輪半径およびリアトレッドの真値は未知であるので、それらをトレッド・車輪半径推定器7からの出力値、すなわち後輪車輪半径およびリアトレッドの推定値rRl†,rRr†,TR†に置き換えると、関係式(19)が得られる。
【0040】
【数13】
【0041】
よって、車両運動を記述する慣性座標系の設定に応じて、初期値を適切に設定することにより、任意の慣性座標系における位置x(nT),y(nT)および姿勢角(ヨー角)γ(nT)は、後輪車輪半径およびリアトレッドの推定値rRl†,rRr†,TR†とパルス信号PRl,PRrから、関係式(15)と(19)に基づいて演算できる。
【0042】
以上のような構成によれば、トレッド・車輪半径推定器7がオンラインで車輪半径およびトレッドを推定しつつ、その結果に基づき車両位置姿勢演算器8が車両の位置および姿勢を演算するので、リアトレッドあるいは後輪車輪径が変化しノミナル値と異なるといった場合でも、車両の位置および姿勢を高精度に測定できる。
【0043】
実施の形態2.
図3はこの発明の実施の形態2による車両の位置姿勢測定装置の構成図である。この装置は、車両の各車輪の車輪速を検出するための車輪速センサ(左前輪)2,車輪速センサ(右前輪)3,車輪速センサ(左後輪)4,車輪速センサ(右後輪)5以外のセンサを必要としない。この構成によれば、図1に示したステアリング角センサ1と実舵角演算器6が不要となるほか、ステアリング機構に基づく検出誤差による車両の位置姿勢測定精度の悪化が生じない。
【0044】
図3のトレッド・車輪半径推定器7aの原理を説明する。関係式(12)よりδFl,δFrを消去すると、
【0045】
【数14】
【0046】
が成り立つ。この関係式(20)から導出できる車輪半径およびトレッドの真値とノミナル値との誤差量が満たす関係式に対して、非線形逐次最小二乗法、拡張カルマンフィルタなどのパラメータ推定手法を適用すると、パルス数PFl,PFr,PRl,PRrのみから、ノミナル値に誤差補正を加えた車輪半径、またはトレッド、または車輪半径およびトレッドの両方のそれぞれ推定値を得ることができる。
【符号の説明】
【0047】
1 ステアリング角センサ(ステアリング角検出手段)、2,3,4,5 車輪速センサ(車輪速検出手段)、6 実舵角演算器(実舵角演算手段)、7,7a トレッド・車輪半径推定器(トレッド・車輪半径推定手段)、8 車両位置姿勢演算器(車両位置姿勢演算手段)、11,12,13,14 車輪。
【特許請求の範囲】
【請求項1】
前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、
ステアリング角を検出するステアリング角検出手段と、
車両の前後左右四輪の車輪速を検出する車輪速検出手段と、
前記ステアリング角検出手段からの出力に基づいて実舵角を演算する実舵角演算手段と、
前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値を演算するトレッド・車輪半径推定手段と、
前記推定値と後輪の前記車輪速に基づき車両の位置および姿勢を演算する車両位置姿勢演算手段と、
を備え、任意の慣性座標系に対する車両の位置および姿勢を測定することを特徴とする車両の位置姿勢測定装置。
【請求項2】
前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、
車両の前後左右四輪の車輪速を検出する車輪速検出手段と、
前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値を演算するトレッド・車輪半径推定手段と、
前記推定値と後輪の前記車輪速に基づき車両の位置および姿勢を演算する車両位置姿勢演算手段と、
を備え、任意の慣性座標系に対する車両の位置および姿勢を測定することを特徴とする車両の位置姿勢測定装置。
【請求項1】
前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、
ステアリング角を検出するステアリング角検出手段と、
車両の前後左右四輪の車輪速を検出する車輪速検出手段と、
前記ステアリング角検出手段からの出力に基づいて実舵角を演算する実舵角演算手段と、
前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値を演算するトレッド・車輪半径推定手段と、
前記推定値と後輪の前記車輪速に基づき車両の位置および姿勢を演算する車両位置姿勢演算手段と、
を備え、任意の慣性座標系に対する車両の位置および姿勢を測定することを特徴とする車両の位置姿勢測定装置。
【請求項2】
前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、
車両の前後左右四輪の車輪速を検出する車輪速検出手段と、
前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値を演算するトレッド・車輪半径推定手段と、
前記推定値と後輪の前記車輪速に基づき車両の位置および姿勢を演算する車両位置姿勢演算手段と、
を備え、任意の慣性座標系に対する車両の位置および姿勢を測定することを特徴とする車両の位置姿勢測定装置。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−255686(P2012−255686A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2011−128036(P2011−128036)
【出願日】平成23年6月8日(2011.6.8)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願日】平成23年6月8日(2011.6.8)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]