
車両の停止制御装置
【課題】自動的に停止・再始動される内燃機関と、内燃機関の停止中に車両を自動的に制動する制動装置を有する場合において、それらを適切に制御することにより、車両の円滑な発進と燃費の向上を実現できる車両の停止制御装置を提供する。
【解決手段】車両Vは、アイドルストップが行われるエンジン3と、アイドルストップ中に作動し、車両Vを制動するパーキングブレーキ60を有している。停止制御装置1によれば、アイドルストップ中に検出された路面の勾配に応じて、再始動時目標回転数NECMDRSTおよびブレーキ解除時間TBRKOFFを設定し、エンジン3が再始動される際に、エンジン回転数NEが再始動時目標回転数NECMDRSTになるようにエンジン3の出力を制御するとともに、再始動時制御の開始時から解除終了時間TBRKOFFが経過したときに、パーキングブレーキ60による制動を解除する。
【解決手段】車両Vは、アイドルストップが行われるエンジン3と、アイドルストップ中に作動し、車両Vを制動するパーキングブレーキ60を有している。停止制御装置1によれば、アイドルストップ中に検出された路面の勾配に応じて、再始動時目標回転数NECMDRSTおよびブレーキ解除時間TBRKOFFを設定し、エンジン3が再始動される際に、エンジン回転数NEが再始動時目標回転数NECMDRSTになるようにエンジン3の出力を制御するとともに、再始動時制御の開始時から解除終了時間TBRKOFFが経過したときに、パーキングブレーキ60による制動を解除する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、内燃機関を自動的に停止・再始動させるとともに、内燃機関の自動停止中に制動装置によって車両を制動するように制御する車両の停止制御装置に関する。
【背景技術】
【0002】
従来のこの種の車両の停止制御装置として、例えば特許文献1に開示されたものが知られている。この車両に搭載された内燃機関は、所定の停止条件が成立したときに停止されるとともに、所定の再始動条件が成立したときに再始動される、いわゆるアイドルストップが行われるものである。また、この車両は、ブレーキペダルで操作されるサービスブレーキ機構と、手動で操作されるパーキングブレーキを有している。この停止制御装置では、ブレーキペダルが踏まれ、車両が停止した後、サービスブレーキ機構のマスターシリンダ内の圧力(以下「マスターシリンダ圧」という)が所定の第1基準液圧を超えた状態が所定時間、継続したときに、停止条件が成立したと判定し、内燃機関を停止させる。その後、ブレーキペダルの踏込量が減少するのに伴い、マスターシリンダ圧が低下し、第1基準液圧よりも小さな第2基準液圧を下回った状態が所定時間、継続したときに、再始動条件が成立したと判定し、内燃機関を再始動させる。
【0003】
また、車両を自動的に制動する制動装置として、電動パーキングブレーキが知られており、例えば特許文献2に開示されている。この電動パーキングブレーキは、車両が停止しており、ブレーキペダルの踏込量が所定の第1しきい値よりも大きく、かつアクセルペダルが踏み込まれていない状態が所定時間、継続したときに、モータを正転させることによって、ブレーキパッドをブレーキディスクに押し付け、その状態でモータを停止する。それにより、制動状態が維持される。その後、ブレーキペダルが解放された状態でアクセルペダルが踏み込まれたときに、モータを逆転させることで、ブレーキパッドをブレーキディスクから引き離し、制動を解除する。
【0004】
また、ブレーキペダルの踏込量が所定の第2しきい値(>第1しきい値)よりも大きいときには、車両が上り坂に停止しているとして、ブレーキパッドの押付力は、より大きくなるように制御され、それにより、上り坂における発進時の後退を防止するようにしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3613970号公報
【特許文献2】特開2007−176191号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
前述したように、特許文献1の停止制御装置では、マスターシリンダ圧が低下したときに内燃機関が再始動される。このため、アイドルストップを継続するためには、ブレーキペダルを踏み続ける必要があり、そのことが運転者の負担となる。また、運転者の不注意などでブレーキペダルの踏込量が意図せずに減少した場合には、発進に適したタイミングよりも早く内燃機関が再始動されることによって、燃費が悪化してしまう。
【0007】
また、特許文献2の電動パーキングブレーキを特許文献1の停止制御装置に適用した場合には、ブレーキペダルの解放によって内燃機関が再始動されても、その後、アクセルペダルが踏み込まれるまでは電動パーキングブレーキによる制動が解除されないので、その間、燃料が無駄に消費され、燃費が悪化するとともに、発進が遅れてしまう。このような不具合を解消するために、例えばアクセルペダルの踏み込みと同時に内燃機関を再始動させた場合には、内燃機関の出力が生じる前に制動が解除されてしまうため、上り坂での発進時に車両が後退するおそれがあるなど、車両を円滑に発進させることができない。
【0008】
本発明は、以上のような課題を解決するためになされたものであり、自動的に停止・再始動される内燃機関と、内燃機関の停止中に車両を自動的に制動する制動装置を有する場合において、それらを適切に制御することによって、車両の円滑な発進と燃費の向上を実現することができる車両の停止制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の目的を達成するために、請求項1に係る発明は、内燃機関3を、所定の停止条件が成立したときに停止させ、所定の再始動条件が成立したときに再始動させるとともに、停止条件が成立しているときに制動装置(実施形態における(以下、本項において同じ)パーキングブレーキ60)を作動させることによって車両Vを制動するように制御する車両の停止制御装置1であって、アクセルペダルが踏み込まれたときに、再始動条件が成立したと判定する再始動条件判定手段(ECU2、図4のステップ3)と、車両Vが停止している路面の勾配(傾斜角AOI)を検出する勾配検出手段(傾斜角センサ25)と、検出された路面の勾配に応じて、内燃機関3の再始動時における再始動時目標回転数NECMDRSTを設定する目標回転数設定手段(ECU2、図8のステップ62,64,65)と、内燃機関3の回転数(エンジン回転数NE)が設定された再始動時目標回転数NECMDRSTになるように、内燃機関3の出力(燃料噴射量QINJ)を制御する出力制御手段(ECU2、図8のステップ66)と、再始動条件の成立後に制動装置の制動を解除する制動解除タイミング(解除終了時間TBRKOFF)を、路面の勾配に応じて設定する制動解除タイミング設定手段(ECU2、図9のステップ72,76,79)と、を備えることを特徴とする。
【0010】
この内燃機関は、車両に搭載されており、所定の停止条件が成立したときに停止されるとともに、所定の再始動条件が成立したときに再始動される、いわゆるアイドルストップが行われるものである。また、停止条件が成立しているアイドルストップ中に、制動装置を作動させ、車両を制動する。
【0011】
また、この車両の停止制御装置によれば、アクセルペダルが踏み込まれたときに、再始動条件が成立したと判定し、再始動が行われる。したがって、アイドルストップ中にブレーキペダルが解放されても、アクセルペダルが踏み込まれない限り、アイドルストップが継続されるので、その継続のためにブレーキペダルを踏み続ける必要がなくなる。また、その間の車両の制動は、制動装置によって確保される。
【0012】
また、アイドルストップ中に車両が停止している路面の勾配を検出するとともに、検出された路面の勾配に応じて、再始動時における再始動時目標回転数を設定し、内燃機関の回転数が再始動時目標回転数になるように内燃機関の出力を制御する。さらに、検出された路面の勾配に応じて、再始動条件の成立後に制動装置の制動を解除する制動解除タイミングを設定する。
【0013】
車両が停止している路面の勾配が異なると、再始動の際の発進時における車両の挙動は異なる。したがって、上記のように、検出された路面の勾配に応じて、再始動時目標回転数を設定し、内燃機関の出力を制御することによって、路面の勾配に応じて想定される車両の挙動に適した内燃機関の出力によって、車両を適切に駆動し、発進させることができる。また、検出された路面の勾配に応じて、制動装置の制動解除タイミングを設定することによって、車両の挙動に適したタイミングで制動装置の制動を解除することができる。
【0014】
以上のように、内燃機関の再始動時に、内燃機関の出力と、制動装置による車両の制動を解除するタイミングを適切に制御でき、それにより、車両の円滑な発進と燃費の向上を実現することができる。
【0015】
請求項2に係る発明は、請求項1に記載の車両の停止制御装置1において、検出された路面の勾配が下り勾配であるときには、平坦であるときと比較し、目標回転数設定手段は、再始動時目標回転数NECMDRSTをより小さな値に設定し(図8のステップ62)、制動解除タイミング設定手段は、制動解除タイミングをより早いタイミングに設定する(図9のステップ72)ことを特徴とする。
【0016】
この構成によれば、アイドルストップ中に検出された路面の勾配が下り勾配であるときには、平坦であるときと比較し、再始動時目標回転数をより小さな値に設定するとともに、制動解除タイミングをより早いタイミングに設定する。アイドルストップ中の車両が停止している路面が下り勾配の場合には、その後に内燃機関が再始動される際に、内燃機関の出力が立ち上がっていなくても、制動装置による車両の制動を解除すると、車両は自重により前進する。したがって、制動装置による制動をより早いタイミングで解除することによって、制動状態での車両の発進(ブレーキの引きずり)を回避でき、車両の発進を円滑に行えるとともに、燃費を向上させることができる。
【0017】
また、下り勾配では、車両の発進に必要な内燃機関の出力は、平坦な場合よりも小さい。したがって、検出された路面の勾配が下り勾配のときに、再始動時目標回転数をより小さな値に設定し、内燃機関の出力を低減することによって、過大な出力による急発進を防止しながら、下り勾配での車両の発進を円滑に行えるとともに、燃費をさらに向上させることができる。
【0018】
請求項3に係る発明は、請求項1に記載の車両の停止制御装置1において、検出された路面の勾配が上り勾配であるときには、平坦であるときと比較し、目標回転数設定手段は、再始動時目標回転数NECMDRSTをより大きな値に設定し(図8のステップ65)、制動解除タイミング設定手段は、制動解除タイミングをより遅いタイミングに設定する(図9のステップ79)ことを特徴とする。
【0019】
この構成によれば、アイドルストップ中に検出された路面の勾配が上り勾配であるときには、平坦であるときと比較し、再始動時目標回転数をより大きな値に設定するとともに、制動解除タイミングをより遅いタイミングに設定する。アイドルストップ中の車両が停止している路面が上り勾配の場合には、その後に内燃機関が再始動される際に、内燃機関の出力が立ち上がる前に制動装置による車両の制動を解除すると、車両は自重により後退するおそれがある。したがって、制動装置による制動をより遅いタイミングで解除することによって、内燃機関の出力が立ち上がった後に制動を解除することができ、発進時の車両の後退を防止することができる。
【0020】
また、上り勾配では、車両の発進に必要な内燃機関の出力は、平坦な場合よりも大きい。したがって、検出された路面の勾配が上り勾配のときに、再始動時目標回転数をより大きな値に設定し、内燃機関の出力をより増大させることによって、発進時のもたつきを防止しながら、上り勾配での車両の発進を円滑に行うことができる。
【0021】
請求項4に係る発明は、請求項1に記載の車両の停止制御装置1において、車両Vの速度(車速VP)を検出する車速検出手段(車速センサ22)と、アクセルペダルの開度(アクセル開度AP)を検出するアクセル開度検出手段(アクセル開度センサ23)と、をさらに備え、出力制御手段は、再始動条件が成立した後、その後の経過時間(タイマ値TMST)が所定時間TREF以上のとき、検出された車両Vの速度が所定速度VREF以上のとき、または検出されたアクセルペダルの開度が所定開度APREF以上のときに、アクセルペダルの開度に応じて内燃機関3の出力を制御する(図4のステップ10,11,12,14)ことを特徴とする。
【0022】
この構成によれば、内燃機関の再始動条件が成立した後、以下の条件が成立したときには、内燃機関の出力の制御を、再始動時目標回転数に代えて、アクセルペダルの開度に応じて行う。すなわち、検出されたアクセルペダルの開度が所定開度以上であるときには、運転者による発進時の加速要求が高いとして、アクセルペダルの開度に応じて内燃機関の出力を制御する。これにより、運転者の加速要求に良好に応えながら車両を発進させることができ、ドライバビリティを向上させることができる。
【0023】
また、再始動条件が成立した後の経過時間が所定時間以上のとき、または検出された車両の速度が所定速度以上のときには、車両の発進が終了し、通常の走行に移行したとして、アクセルペダルの開度に応じて内燃機関の出力を制御する。これにより、車両の発進から通常の走行に円滑に移行することができる。
【図面の簡単な説明】
【0024】
【図1】本実施形態による停止制御装置を適用した車両を概略的に示す図である。
【図2】停止制御装置のブロック図である。
【図3】パーキングブレーキの概略構成を示す断面図である。
【図4】車両の制御処理を示すフローチャートである。
【図5】内燃機関の停止条件判定処理を示すフローチャートである。
【図6】再始動時制御処理を示すフローチャートである。
【図7】勾配判定処理を示すフローチャートである。
【図8】内燃機関の出力制御処理を示すフローチャートである。
【図9】ブレーキパラメータの設定処理を示すフローチャートである。
【図10】パーキングブレーキの解除制御処理を示すフローチャートである。
【図11】制御処理によって得られる動作例を、車両が停止した路面が平坦である場合について示すタイミングチャートである。
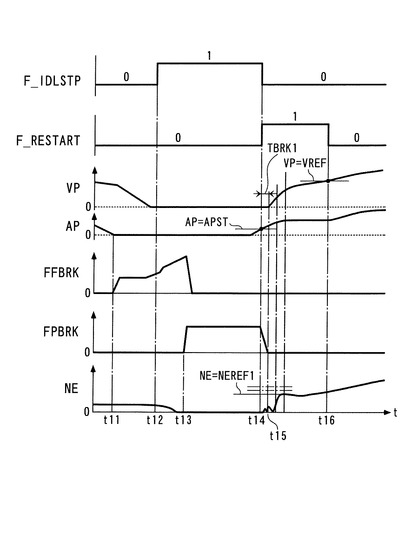
【図12】制御処理によって得られる動作例を、車両が停止した路面が下り勾配である場合について示すタイミングチャートである。
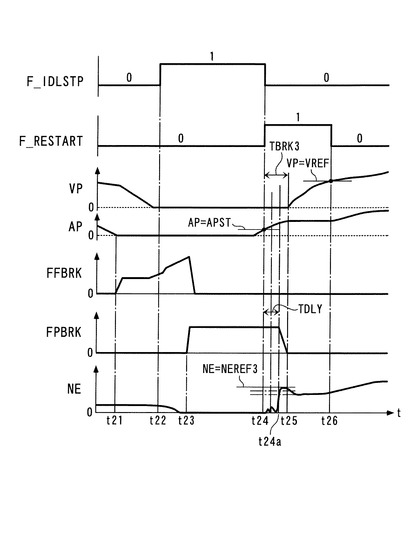
【図13】制御処理によって得られる動作例を、車両が停止した路面が上り勾配である場合について示すタイミングチャートである。
【発明を実施するための形態】
【0025】
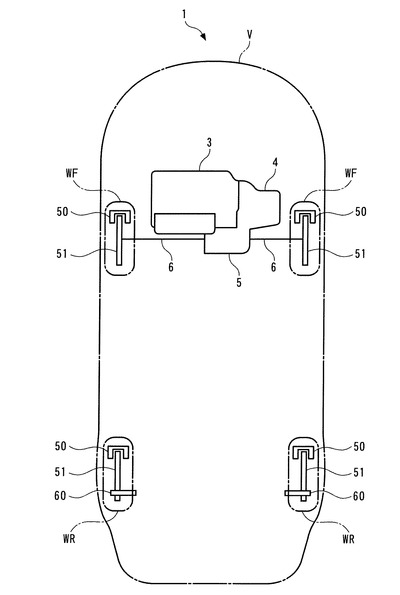
以下、図面を参照しながら、本発明の好ましい実施形態を詳細に説明する。図1は、本実施形態による車両の停止制御装置1を適用した車両Vを概略的に示している。同図に示すように、車両Vは、左右の前輪WF,WFおよび後輪WR,WRを有する前輪駆動式の車両であり、その前部に横置きに搭載された内燃機関(以下「エンジン」という)3と、エンジン3の動力を変速するための自動変速機4などを備えている。
【0026】
エンジン3は、ガソリンエンジンであり、その出力は、燃料噴射弁8(図2参照)から供給される燃料噴射量QINJに応じて制御される。自動変速機4は、エンジン3の出力軸に連結されたトルクコンバータと、「1,2,3,D4,D5,N,R,P」からなる8つのシフトポジションを選択可能なシフトレバーと、1〜5速位置およびリバース位置からなる6種類の変速段に切換可能なギヤ機構などを備えている(いずれも図示せず)。
【0027】
自動変速機4のトルクコンバータの出力軸(図示せず)は、終減速機構5および左右のドライブシャフト6,6を介して、前輪WF,WFに連結されており、それにより、エンジン3の動力が前輪WF,WFに伝達される。
【0028】
各前輪WFおよび各後輪WRには、車両Vを制動するためのフットブレーキ50が設けられている。このフットブレーキ50は、ディスクタイプのものであり、各前輪WFおよび後輪WRと一体のディスク51と、その両側に配置された一対のブレーキパッド(図示せず)と、油圧回路(図示せず)を有している。運転者によってブレーキペダル(図示せず)が踏まれると、油圧回路から供給された油圧により、前輪WFおよび後輪WRのそれぞれにおいて、ブレーキパッドが作動し、ディスク51を挟むことによって、車両Vが制動される。フットブレーキ50の制動力FFBRKは、ブレーキペダルの踏み込み量が大きいほど、より大きくなる。
【0029】
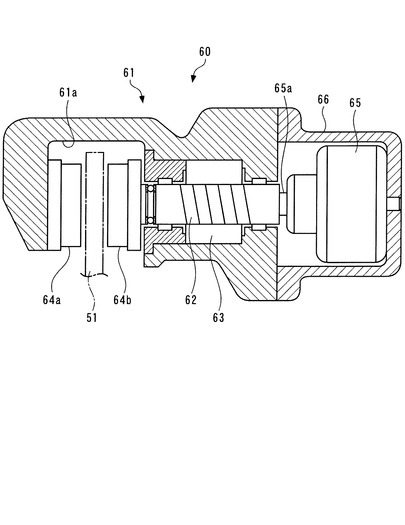
さらに、各後輪WRには、上述したフットブレーキ50とは別個に作動する電動式のパーキングブレーキ60が設けられている。図3に示すように、パーキングブレーキ60は、車体に固定されたキャリパボディ61と、キャリパボディ61内に固定されたナット62と、キャリパボディ61内に左右方向に延び、ナット62にねじ込まれた長ねじ63と、一対のブレーキパッド64a,64bと、モータ65を有している。
【0030】
キャリパボディ61には、長ねじ63の一端側に隣接するように凹部61aが形成されており、この凹部61aに前記一対のブレーキパッド64a,64bが収容されている。一方のブレーキパッド64aは、凹部61aの壁面に固定されており、他方のブレーキパッド64bは、長ねじ63の一端部に取り付けられている。両ブレーキパッド64a,64bは、互いに対向しており、それらの間にディスク51が配置されている。
【0031】
長ねじ63の他端部には、モータ65の回転軸65aが固定されており、モータ65は、キャリパボディ61に固定されたカバー66によって覆われている。モータ65は、後述するECU2に接続されており、その動作は、ECU2からの制御信号によって制御される。
【0032】
以上の構成により、モータ65を正転させると、長ねじ63が回転しながらディスク51側(同図の左方向)に移動し、それに伴い、長ねじ63と一体に移動するブレーキパッド64bとブレーキパッド64aとの間にディスク51を挟み付けることによって、後輪WRを制動する。このときのパーキングブレーキ60の制動力FPBRKは、ブレーキパッド64a,64bの押し付け量に応じて定まり、押し付け量は、ECU2によりモータ65の回転角を制御することによって制御される。
【0033】
一方、その状態からモータ65を逆転させると、ブレーキパッド64bが長ねじ63と一体にモータ65側に移動することによって、後輪WRの制動が解除される。
【0034】
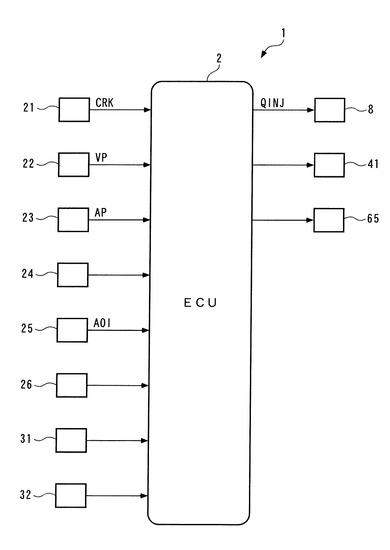
また、エンジン3のクランクシャフト3aには、クランク角センサ21が設けられている(図2参照)。クランク角センサ21は、クランクシャフト3aの回転に伴い、所定のクランク角(例えば30゜)ごとに、パルス信号であるCRK信号をECU2に出力する。ECU2は、CRK信号に基づき、エンジン3の回転数(以下「エンジン回転数」という)NEを算出する。
【0035】
また、図2に示すように、ECU2には、車速センサ22から、車両の速度である車速VPを表す検出信号が、アクセル開度センサ23から、アクセルペダル(図示せず)の開度(以下「アクセル開度」という)APを表す検出信号が、シフトポジションセンサ24から、シフトレバーのシフトポジションを表す検出信号が、傾斜角センサ25から、車両Vの前後方向の傾斜角AOIを表す検出信号が、それぞれ出力される。
【0036】
さらに、ECU2には、電流電圧センサ26から、スタータ41の電源であるバッテリ(図示せず)に入出力される電流・電圧を表す検出信号が出力される。ECU2は、この検出信号に基づいて、バッテリの充電残量(以下「バッテリ残量」という)SOCを算出する。
【0037】
また、ECU2には、イグニッションスイッチ31から、そのオン/オフ状態を表す検出信号が出力され、ブレーキスイッチ32から、ブレーキペダルのオン/オフ状態を表す検出信号が出力される。なお、エンジン3が停止している状態でイグニッションスイッチ31がオンされると、クランクシャフト3aに連結されたスタータ41が作動することによって、エンジン3がクランキングされ、始動される。また、エンジン3の運転時にイグニッションスイッチ31がオフされると、エンジン3が停止される。
【0038】
また、ECU2は、CPU、RAM、ROMおよび入力インターフェース(いずれも図示せず)などから成るマイクロコンピュータで構成されている。ECU2は、上述した各種のセンサ21〜26およびスイッチ31,32の検出信号に応じ、ROMに記憶された制御プログラムなどに基づいて、エンジン3の各種の制御処理を実行する。
【0039】
なお、本実施形態では、ECU2は、再始動条件判定手段、目標回転数設定手段、出力制御手段、および制動解除タイミング設定手段に相当する。
【0040】
次に、図4〜図13を参照しながら、本発明の実施形態による車両Vの制御処理について説明する。この制御処理は、エンジン3のアイドルストップとそれからの再始動を主に制御するものであり、所定時間ごとに実行される。
【0041】
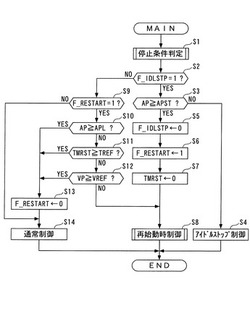
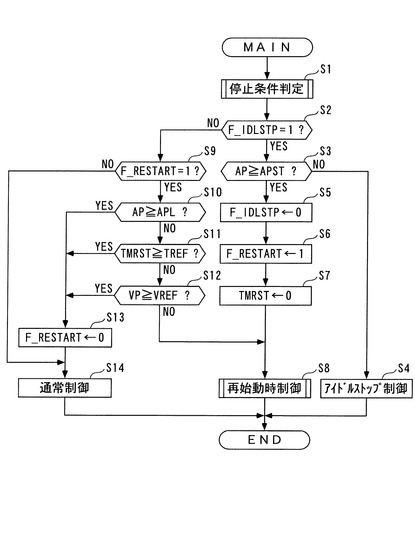
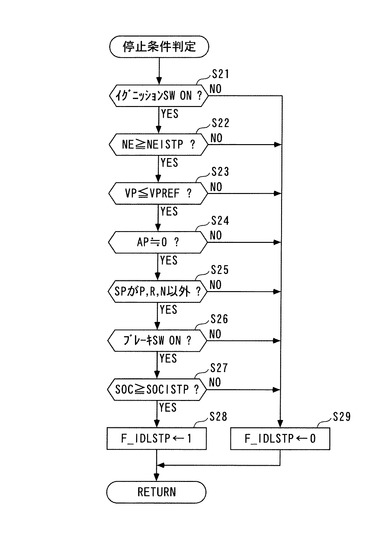
図4はそのメインルーチンを示す。本処理ではまず、ステップ1(「S1」と図示。以下同じ)において、エンジン3の停止条件判定処理を実行する。図5はそのサブルーチンを示す。本処理ではまず、ステップ21〜27において、以下の条件(a)〜(g)が成立しているか否かをそれぞれ判別する。
(a)イグニッションスイッチ(SW)31がオン状態であること
(b)エンジン回転数NEが所定値NEISTP以上であること
(c)車速VPが所定値VPREF以下であること
(d)アクセル開度APがほぼ0であること
(e)シフトポジション(SP)がP,R,N以外であること
(f)ブレーキスイッチ(SW)32がオン状態であること
(g)バッテリ残量SOCが所定値SOCISTP以上であること
【0042】
これらの条件(a)〜(g)がすべて成立しているときには、停止条件が成立していると判定し、そのことを表すために、ステップ28において、アイドルストップフラグF_IDLSTPを「1」にセットし、本処理を終了する。エンジン3の運転中にアイドルストップフラグF_IDLSTPが「1」にセットされると、エンジン3を自動停止させるアイドルストップが開始される。
【0043】
一方、ステップ21〜27の答のいずれかがNOで、条件(a)〜(g)のいずれかが成立していないときには、停止条件が成立していないと判定し、そのことを表すために、ステップ29において、アイドルストップフラグF_IDLSTPを「0」にセットし、本処理を終了する。
【0044】
図4に戻り、ステップ1に続くステップ2では、アイドルストップフラグF_IDLSTPが「1」であるか否かを判別する。この答がYESで、アイドルストップ中のときには、ステップ3において、アクセル開度APが所定の始動用開度APST以上であるか否かを判別する。この答がNOのときには、アイドルストップ制御を実行する(ステップ4)ことによって、アイドルストップを継続し、本処理を終了する。
【0045】
一方、上記ステップ3の答がYESで、AP≧APSTのときには、アイドルストップを終了すべきであると判定し、アイドルストップフラグF_IDLSTPを「0」にリセットし(ステップ5)、再始動フラグF_RESTARTを「1」にセットする(ステップ6)とともに、アップカウント式の再始動タイマのタイマ値TMRSTを0にリセットする(ステップ7)。
【0046】
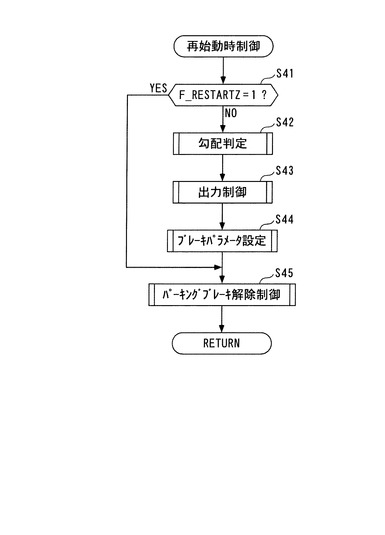
次に、ステップ8において、エンジン3を再始動させるための再始動時制御処理を実行し、図4の処理を終了する。図6は再始動時制御処理のサブルーチンを示す。本処理ではまず、ステップ41において、再始動フラグの前回値F_RESTARTZが「1」であるか否かを判別する。この答がNOで、再始動時制御を開始した直後のときには、ステップ42〜44において、勾配判定処理、出力制御処理およびブレーキパラメータ設定処理を実行した後、後述するステップ45に進む。一方、上記ステップ41の答がYESで、再始動時制御の開始直後でないときには、ステップ42〜44をスキップしてステップ45に進む。
【0047】
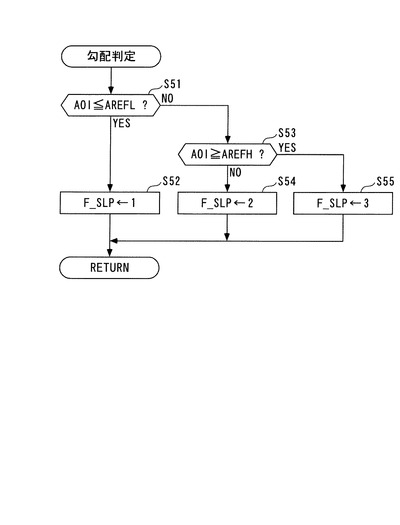
図7は、ステップ42で実行される勾配判定処理を示す。本処理ではまず、ステップ51において、傾斜角センサ25で検出された傾斜角AOIが、値0付近の負値である第1所定角度AREFL(例えば−4°)以下であるか否かを判別する。この答がYESのときには、アイドルストップ中に車両Vが停止していた路面(以下「停止路面」という)が下り勾配であると判定し、そのことを表すために、ステップ52において、勾配フラグF_SLPを「1」にセットし、本処理を終了する。
【0048】
一方、上記ステップ51の答がNOで、AOI>AREFLのときには、ステップ53において、傾斜角AOIが、値0付近の正値である第2所定角度AREFH(例えば4°)以上であるか否かを判別する。この答がNOで、AREFL<AOI<AREFHのときには、停止路面が平坦であると判定し、そのことを表すために、ステップ54において、勾配フラグF_SLPを「2」にセットし、本処理を終了する。
【0049】
一方、上記ステップ53の答がYESで、AOI≧AREFHのときには、停止路面が上り勾配であると判定し、そのことを表すために、ステップ55において、勾配フラグF_SLPを「3」にセットし、本処理を終了する。
【0050】
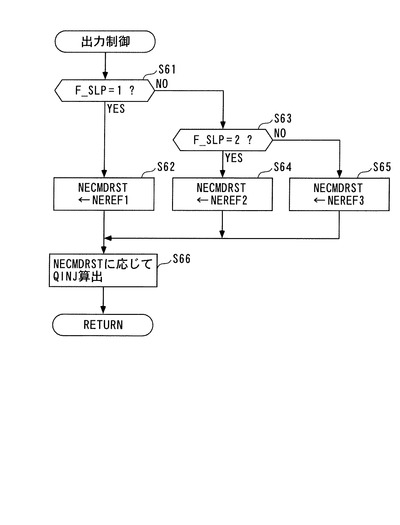
図8は、図6の前記ステップ43で実行されるエンジン3の出力制御処理を示す。本処理ではまず、ステップ61において、勾配フラグF_SLPが「1」であるか否かを判別する。この答がYESで、停止路面が下り勾配のときには、ステップ62において、再始動時目標回転数NECMDRSTを第1所定回転数NEREF1(例えば900rpm)に設定する。
【0051】
一方、上記ステップ61の答がNOのときには、ステップ63において、勾配フラグF_SLPが「2」であるか否かを判別する。この答がYESで、停止路面が平坦のときには、ステップ64において、再始動時目標回転数NECMDRSTを、第1所定回転数NEREF1よりも大きな第2所定回転数NEREF2(例えば1100rpm)に設定する。
【0052】
一方、上記ステップ63の答がNOのとき、すなわち、勾配フラグF_SLPが「3」で、停止路面が上り勾配であるときには、ステップ65において、再始動時目標回転数NECMDRSTを、第2所定回転数NEREF2よりも大きな第3所定回転数NEREF3(例えば1300rpm)に設定する。
【0053】
上記ステップ62、64または65に続くステップ66では、設定された再始動時目標回転数NECMDRSTに応じて燃料噴射量QINJを算出し、本処理を終了する。これにより、燃料噴射量QINJに応じたエンジン3の出力が得られることによって、エンジン回転数NEが再始動時目標回転数NECMDRSTに制御される。
【0054】
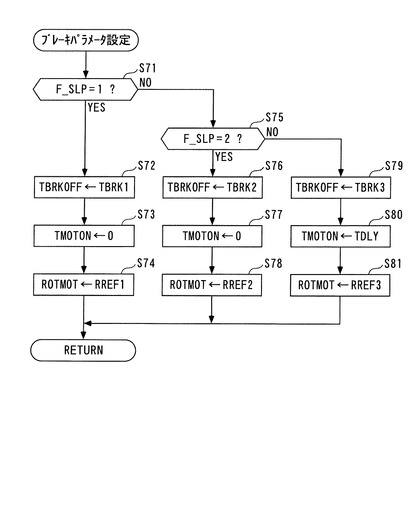
図9は、図6の前記ステップ44で実行されるブレーキパラメータの設定処理を示す。このブレーキパラメータは、エンジン3の再始動に伴ってモータ65によりパーキングブレーキ60の制動を解除する際の、解除開始時間TMOTON、解除終了時間TBRKOFF、およびモータ65の回転速度(以下「モータ回転速度」という)ROTMOTを設定するものである。なお、解除開始時間TMOTONおよび解除終了時間TBRKOFFは、エンジン3の再始動時制御の開始時を起点として表される。
【0055】
本処理ではまず、ステップ71において、勾配フラグF_SLPが「1」であるか否かを判別する。この答がYESで、停止路面が下り勾配のときには、解除終了時間TBRKOFFを第1所定時間TBRK1(例えば0.2sec)に、解除開始時間TMOTONを0にそれぞれ設定する(ステップ72,73)。また、それらの設定に見合うように、モータ回転速度ROTMOTを第1所定速度RREF1に設定し(ステップ74)、本処理を終了する。
【0056】
一方、上記ステップ71の答がNOのときには、ステップ75において、勾配フラグF_SLPが「2」であるか否かを判別する。この答がYESで、停止路面が平坦のときには、解除終了時間TBRKOFFを第1所定時間TBRK1よりも大きな第2所定時間TBRK2(例えば0.4sec)に、解除開始時間TMOTONを0にそれぞれ設定する(ステップ76,77)。また、それらの設定に見合うように、モータ回転速度ROTMOTを第1所定速度REF1よりも小さな第2所定速度RREF2に設定し(ステップ78)、本処理を終了する。
【0057】
一方、上記ステップ75の答がNOで、勾配フラグF_SLPが「3」であり、停止路面が上り勾配のときには、解除終了時間TBRKOFFを第2所定時間TBRK2よりも大きな第3所定時間TBRK3(例えば0.6sec)に、解除開始時間TMOTONを所定の遅れ時間TDLY(例えば0.4sec)にそれぞれ設定する(ステップ79,80)。また、それらの設定に見合うように、モータ回転速度ROTMOTを第3所定速度RREF3に設定し(ステップ81)、本処理を終了する。
【0058】
図6に戻り、再始動時制御の開始直後に上記ステップ42〜44の処理を実行した後、または、再始動時制御の開始直後でないときには、ステップ45において、パーキングブレーキ60の解除制御処理を実行し、図6の処理を終了する。
【0059】
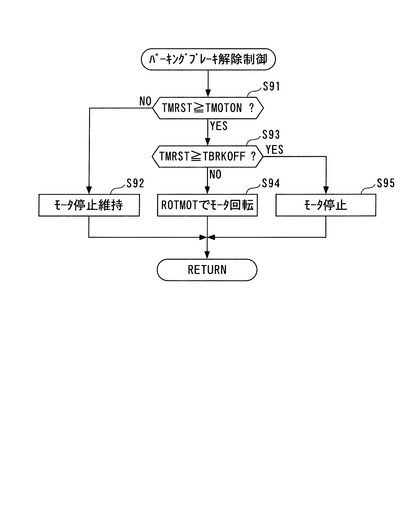
図10はそのサブルーチンを示す。本処理ではまず、ステップ91において、図4のステップ7でリセットされた再始動タイマのタイマ値TMRSTが図9のステップ73、77または80で設定された解除開始時間TMOTON以上であるか否かを判別する。この答がNOで、再始動時制御の開始時から解除開始時間TMOTONが経過していないときには、ステップ92において、モータ65を停止状態に維持する。
【0060】
一方、前記ステップ91の答がYESのときには、ステップ93において、タイマ値TMRSTが図9の前記ステップ72、76または79で設定された解除終了時間TBRKOFF以上であるか否かを判別する。この答がNOで、TMOTON≦TMRST<TBRKOFFのとき、すなわち、再始動時制御の開始時からの経過時間が、解除開始時間TMOTONに達した後、解除終了時間TBRKOFFに達するまでは、図9の前記ステップ74、78または81で設定されたモータ回転速度ROTMOTでモータ65を回転させ、本処理を終了する。
【0061】
一方、前記ステップ93の答がYESで、TMRST≧TBRKOFFのとき、すなわち、再始動時制御の開始時から解除終了時間TBRKOFFが経過したときには、ステップ95において、モータ65を停止し、本処理を終了する。
【0062】
以上のようなモータ65の制御により、解除開始時間TMOTONに相当するタイミングで、モータ65が作動し、パーキングブレーキ60の解除が開始される。その後、解除終了時間TBRKOFFに相当するタイミングで、モータ65が停止し、パーキングブレーキ60の解除が終了する。
【0063】
図4に戻り、前記ステップ2の答がNOで、アイドルストップフラグF_IDLSTPが「0」であり、アイドルストップ中でないときには、ステップ9において、再始動フラグF_RESTARTが「1」であるか否かを判別する。この答がYESで、再始動時制御中のときには、ステップ10〜12において、以下の条件(a)〜(c)が成立しているか否かをそれぞれ判別する。
(a)アクセル開度APが所定開度APL(例えば20°)以上であること
(b)再始動タイマのタイマ値TMRSTが所定時間TREF(例えば1sec)以上であること
(c)車速VPが所定速度VREF(例えば3km/h)以上であること
【0064】
これらの条件(a)〜(c)がいずれも成立していないときには、前記ステップ8に進み、再始動時制御を継続し、本処理を終了する。
【0065】
一方、ステップ10の答がYESで、AP≧APLのときには、運転者による発進時の加速要求が高いため、再始動時制御を終了すべきとして、そのことを表すために、ステップ13において、再始動フラグF_RESTARTを「0」にセットするとともに、ステップ14において、通常制御処理を実行し、本処理を終了する。
【0066】
また、上記ステップ11および12の答のいずれかがYESで、再始動時制御の開始時からの経過時間が所定時間TREF以上になったとき、または車速VPが所定速度VREF以上になったときには、車両Vの発進が終了していると推定されるため、再始動時制御を終了すべきとして、前記ステップ13および14を実行し、再始動フラグF_RESTARTを「0」にセットするとともに、通常制御処理を実行する。
【0067】
また、上記のように前記ステップ13が実行された後には、前記ステップ9の答がNOになり、その場合には、前記ステップ14に進み、通常制御処理を実行する。
【0068】
なお、この通常制御処理では、アクセル開度APおよびエンジン回転数NEに応じ、所定のマップ(図示せず)を検索することによって、エンジン3の要求トルクを算出するとともに、算出された要求トルクとエンジン回転数NEに応じて、燃料噴射量QINJが算出される。すなわち、アクセル開度APに応じたエンジン3の出力の制御を実行する。
【0069】
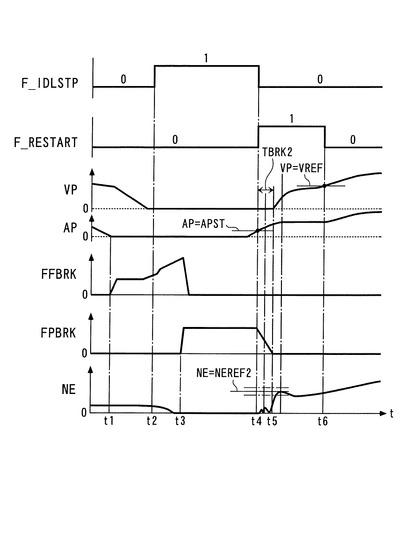
図11〜図13は、これまで説明した車両Vの制御処理によって得られる動作例を示している。図11は、停止路面が平坦で、その傾斜角AOIがAREFL<AOI<AREFHの範囲にある例である。この例では、車両Vが走行している状態から、時点t1において、アクセル開度APが0になるとともに、ブレーキペダルが踏まれており、それに伴い、車速VPおよびエンジン回転数NEが低下し、フットブレーキ50の制動力FFBRKが次第に増加する。
【0070】
そして、停止条件が成立すると(t2)、アイドルストップフラグF_IDLSTPが「1」にセットされることで、アイドルストップが開始され(ステップ4)、エンジン回転数NEが0まで低下する。また、この例では、エンジン回転数NEが0になる直前にブレーキペダルが解放されており、それに伴うフットブレーキ50の制動力FFBRKの低下を補うように、パーキングブレーキ60が作動し(t3)、その制動力FPBRKが一定値まで増加する。
【0071】
その後、アクセルペダルが踏み込まれ、アクセル開度APが始動用開度APST以上になると(t4)、再始動フラグF_RESTARTが「1」にセットされ(ステップ6)、アイドルストップが終了し、エンジン3の再始動時制御が開始される。この再始動の開始の際、停止路面が平坦であると判定され、勾配フラグF_SLPが「2」にセットされる(ステップ54)。
【0072】
また、この路面勾配の判定結果に応じて、再始動時目標回転数NECMDRSTが中程度の第2所定回転数NEREF2に設定される(ステップ64)とともに、解除終了時間TBRKOFFが中程度の第2所定時間TBRK2に、解除開始時間TMOTONが0に、モータ回転速度ROTMOTが第2所定速度RREF2にそれぞれ設定される(ステップ76〜78)。
【0073】
そして、設定された再始動時目標回転数NECMDRSTに応じて燃料噴射量QINJを算出し、それに基づいてエンジン3に燃料を供給することによって、再始動が開始されるとともに、エンジン回転数NEが第2所定回転数NEREF2に向かって上昇する。また、解除開始時間TMOTONが0に設定されることにより、再始動時制御の開始と同時にパーキングブレーキ60のモータ65が第2所定速度RREF2で回転し始め、それに伴い、制動力FPBRKが低下する。
【0074】
そして、再始動時制御の開始時から解除終了時間TBRKOFF(=第2所定時間TBRK2)が経過したときに(t5)、パーキングブレーキ60のブレーキパッド64bがディスク51から引き離されることによって、制動力FPBRKが0になり、パーキングブレーキ60による制動が解除されるとともに、車速VPが0から増加し始める。
【0075】
その後、車速VPが所定速度VREFに達したときに(t6)、再始動フラグF_RESTARTが「0」にセットされ(ステップ13)、再始動時制御が終了するとともに、通常制御が開始される。この通常制御では、燃料噴射量QINJの算出が、アクセル開度APおよびエンジン回転数NEに応じて行われる。
【0076】
図12は、停止路面が下り勾配で、その傾斜角AOI≦AREFLの例である。この例では、時点t11〜t14での動作は、上述した図11の例と基本的に同じである。時点14において、エンジン3の再始動時制御が開始されると、その際、停止路面が下り勾配であると判定され、勾配フラグF_SLPが「1」にセットされる(ステップ52)。
【0077】
また、この路面勾配の判定結果に応じて、再始動時目標回転数NECMDRSTがより小さな第1所定回転数NEREF1に設定される(ステップ62)とともに、解除終了時間TBRKOFFがより小さな第1所定時間TBRK1に、解除開始時間TMOTONが0に、モータ回転速度ROTMOTがより大きな第1所定速度RREF1にそれぞれ設定される(ステップ72〜74)。
【0078】
そして、再始動時目標回転数NECMDRSTに応じて算出した燃料噴射量QINJに基づき、エンジン3に燃料を供給することによって、再始動が開始されるとともに、エンジン回転数NEが第1所定回転数NEREF1に向かって上昇する。また、解除開始時間TMOTONが0に設定されることにより、再始動時制御の開始と同時にパーキングブレーキ60のモータ65が第1所定速度RREF1で回転し始め、それに伴い、制動力FPBRKが低下する。
【0079】
そして、再始動時制御の開始時から解除終了時間TBRKOFF(=第1所定時間TBRK1)が経過したときに(t15)、制動力FPBRKが0になり、パーキングブレーキ60による制動が解除されるとともに、車速VPが0から増加し始める。
【0080】
その後、車速VPが所定速度VREFに達したときに(t16)、再始動フラグF_RESTARTが「0」にセットされ(ステップ13)、再始動時制御が終了するとともに、通常制御が開始される。
【0081】
図13は、停止路面が上り勾配で、その傾斜角AOI≧AREFHの例である。この例では、時点t21〜t24での動作は、上述した図11および図12の例と基本的に同じである。時点24において、エンジン3の再始動時制御が開始されると、その際、停止路面が上り勾配であると判定され、勾配フラグF_SLPが「3」にセットされる(ステップ55)。
【0082】
また、この路面勾配の判定結果に応じて、再始動時目標回転数NECMDRSTが第2所定回転数NEREF2よりも大きな第3所定回転数NEREF3に設定される(ステップ65)とともに、解除終了時間TBRKOFFが第2所定時間TBRK2よりも大きな第3所定時間TBRK3に、解除開始時間TMOTONが所定の遅れ時間TDLYに、モータ回転速度ROTMOTが第3所定速度RREF3にそれぞれ設定される(ステップ79〜81)。
【0083】
そして、再始動時目標回転数NECMDRSTに応じて算出した燃料噴射量QINJに基づき、エンジン3に燃料を供給することによって、再始動が開始されるとともに、エンジン回転数NEが第3所定回転数NEREF3に向かって上昇する。また、再始動時制御の開始時から遅れ時間TDLYが経過したときに(t24a)パーキングブレーキ60のモータ65が第3所定速度RREF3で回転し始め、それに伴い、制動力FPBRKが低下する。
【0084】
そして、再始動時制御の開始時から解除終了時間TBRKOFF(=第3所定時間TBRK3)が経過したときに(t25)、制動力FPBRKが0になり、パーキングブレーキ60による制動が解除されるとともに、車速VPが0から増加し始める。
【0085】
その後、車速VPが所定速度VREFに達したときに(t26)、再始動フラグF_RESTARTが「0」にセットされ(ステップ13)、再始動時制御が終了するとともに、通常制御が開始される。
【0086】
なお、上記の3つの例では、車速VPが所定速度VREFに達したときに、再始動時制御から通常制御に移行しているが、その前にアクセル開度APが所定開度APL以上になった場合(ステップ10:YES)、または再始動タイマのタイマ値TMRSTが所定時間TREF以上になった場合(ステップ11:YES)には、その時点で通常制御への移行が行われる。
【0087】
以上のように、本実施形態によれば、アイドルストップ中にアクセル開度APが始動用開度APST以上になったときに、アイドルストップを終了し、エンジンを再始動させる。したがって、アイドルストップ中にブレーキペダルが解放されても、アクセルペダルが踏み込まれない限り、アイドルストップが継続されるので、その継続のためにブレーキペダルを踏み続ける必要がなく、運転者の負担を軽減することができる。また、その間の車両Vの制動は、パーキングブレーキ60によって確保される。
【0088】
また、アイドルストップ中に車両Vが停止していた路面が下り勾配と判定されたときには、解除終了時間TBRKOFFを、路面が平坦であるとき(=第2所定時間TBRK2)よりも小さな第1所定時間TBRK1に設定するので、パーキングブレーキ60の引きずりを回避でき、燃費を向上させることができる。それに加えて、再始動時目標回転数NECMDRSTを、路面が平坦であるとき(=第2所定回転数NEREF2)よりも小さな第1所定回転数NEREF1に設定するので、過大な出力による急発進を防止しながら、下り勾配での車両Vの発進を円滑に行えるとともに、燃費をさらに向上させることができる。
【0089】
また、傾斜角AOIが第2所定角度AREFH以上のときには、路面の勾配が上り勾配であると判定し、解除終了時間TBRKOFFを、路面が平坦であるときの値よりも大きな第3所定時間TBRK3に設定するので、エンジン3の出力が立ち上がった後に、パーキングブレーキ60を解除することができ、発進時の車両Vの後退を防止することができる。また、それに加えて、再始動時目標回転数NECMDRSTを、路面が平坦であるときの値よりも大きな第3所定回転数NEREF3に設定するので、エンジン3の出力をより増大させることができ、発進時のもたつきを防止しながら、上り勾配での車両の発進を円滑に行うことができる。
【0090】
また、再始動時制御の開始時からの経過時間TMRSTが所定時間TREF以上のとき、車速VPが所定速度VREF以上のとき、またはアクセル開度APが所定開度APL以上のときに、再始動時制御から通常制御に移行し、エンジン3の出力を、アクセル開度APに応じて制御するので、運転者の加速要求に良好に応えながら車両Vを発進させることができ、ドライバビリティを向上させることができる。
【0091】
なお、本発明は、説明した実施形態に限定されることなく、種々の態様で実施することができる。例えば、実施形態では、傾斜角AOIを用いて、路面の勾配が、下り勾配、平坦または上り勾配のいずれであるかを判定し、その判定結果に応じて、再始動時目標回転数NECMDRSTおよび解除終了時間TBRKOFFをステップ状に設定しているが、これに限らず、傾斜角AOIに応じて、再始動時目標回転数NECMDRSTおよび解除終了時間TBRKOFFを連続的に設定してもよい。
【0092】
また、実施形態では、アイドルストップ条件が成立しているときにパーキングブレーキ60を作動させることによって車両Vを制動するように制御しているが、これに限らず、例えば、ブレーキペダルを自動的に操作することが可能な機器を設け、その機器をアイドルストップ条件が成立しているときに作動させることによって、車両Vを制動するように制御してもよい。その場合には、アイドルストップの終了後に、解除終了時間TBRKOFFに応じて、ブレーキペダルが自動的に解放される。
【0093】
また、実施形態は、本発明をガソリンエンジンを搭載した車両に適用した例であるが、本発明は、これに限らず、ガソリンエンジン以外のディーゼルエンジンなどの各種のエンジンを搭載した車両にも適用可能である。その他、本発明の趣旨の範囲内で、細部の構成を適宜、変更することが可能である。
【符号の説明】
【0094】
1 停止制御装置
2 ECU(再始動条件判定手段、目標回転数設定手段、出力制御手段、
制動解除タイミング設定手段)
3 内燃機関
22 車速センサ(車速検出手段)
23 アクセル開度センサ(アクセル開度検出手段)
25 傾斜角センサ(勾配検出手段)
60 パーキングブレーキ(制動装置)
V 車両
AOI 傾斜角(車両が停止している路面の勾配)
NECMDRST 再始動時目標回転数
NE エンジン回転数(内燃機関の回転数)
QINJ 燃料噴射量(内燃機関の出力)
TBRKOFF 解除終了時間(制動解除タイミング)
VP 車速(車両の速度)
【技術分野】
【0001】
本発明は、内燃機関を自動的に停止・再始動させるとともに、内燃機関の自動停止中に制動装置によって車両を制動するように制御する車両の停止制御装置に関する。
【背景技術】
【0002】
従来のこの種の車両の停止制御装置として、例えば特許文献1に開示されたものが知られている。この車両に搭載された内燃機関は、所定の停止条件が成立したときに停止されるとともに、所定の再始動条件が成立したときに再始動される、いわゆるアイドルストップが行われるものである。また、この車両は、ブレーキペダルで操作されるサービスブレーキ機構と、手動で操作されるパーキングブレーキを有している。この停止制御装置では、ブレーキペダルが踏まれ、車両が停止した後、サービスブレーキ機構のマスターシリンダ内の圧力(以下「マスターシリンダ圧」という)が所定の第1基準液圧を超えた状態が所定時間、継続したときに、停止条件が成立したと判定し、内燃機関を停止させる。その後、ブレーキペダルの踏込量が減少するのに伴い、マスターシリンダ圧が低下し、第1基準液圧よりも小さな第2基準液圧を下回った状態が所定時間、継続したときに、再始動条件が成立したと判定し、内燃機関を再始動させる。
【0003】
また、車両を自動的に制動する制動装置として、電動パーキングブレーキが知られており、例えば特許文献2に開示されている。この電動パーキングブレーキは、車両が停止しており、ブレーキペダルの踏込量が所定の第1しきい値よりも大きく、かつアクセルペダルが踏み込まれていない状態が所定時間、継続したときに、モータを正転させることによって、ブレーキパッドをブレーキディスクに押し付け、その状態でモータを停止する。それにより、制動状態が維持される。その後、ブレーキペダルが解放された状態でアクセルペダルが踏み込まれたときに、モータを逆転させることで、ブレーキパッドをブレーキディスクから引き離し、制動を解除する。
【0004】
また、ブレーキペダルの踏込量が所定の第2しきい値(>第1しきい値)よりも大きいときには、車両が上り坂に停止しているとして、ブレーキパッドの押付力は、より大きくなるように制御され、それにより、上り坂における発進時の後退を防止するようにしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3613970号公報
【特許文献2】特開2007−176191号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
前述したように、特許文献1の停止制御装置では、マスターシリンダ圧が低下したときに内燃機関が再始動される。このため、アイドルストップを継続するためには、ブレーキペダルを踏み続ける必要があり、そのことが運転者の負担となる。また、運転者の不注意などでブレーキペダルの踏込量が意図せずに減少した場合には、発進に適したタイミングよりも早く内燃機関が再始動されることによって、燃費が悪化してしまう。
【0007】
また、特許文献2の電動パーキングブレーキを特許文献1の停止制御装置に適用した場合には、ブレーキペダルの解放によって内燃機関が再始動されても、その後、アクセルペダルが踏み込まれるまでは電動パーキングブレーキによる制動が解除されないので、その間、燃料が無駄に消費され、燃費が悪化するとともに、発進が遅れてしまう。このような不具合を解消するために、例えばアクセルペダルの踏み込みと同時に内燃機関を再始動させた場合には、内燃機関の出力が生じる前に制動が解除されてしまうため、上り坂での発進時に車両が後退するおそれがあるなど、車両を円滑に発進させることができない。
【0008】
本発明は、以上のような課題を解決するためになされたものであり、自動的に停止・再始動される内燃機関と、内燃機関の停止中に車両を自動的に制動する制動装置を有する場合において、それらを適切に制御することによって、車両の円滑な発進と燃費の向上を実現することができる車両の停止制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の目的を達成するために、請求項1に係る発明は、内燃機関3を、所定の停止条件が成立したときに停止させ、所定の再始動条件が成立したときに再始動させるとともに、停止条件が成立しているときに制動装置(実施形態における(以下、本項において同じ)パーキングブレーキ60)を作動させることによって車両Vを制動するように制御する車両の停止制御装置1であって、アクセルペダルが踏み込まれたときに、再始動条件が成立したと判定する再始動条件判定手段(ECU2、図4のステップ3)と、車両Vが停止している路面の勾配(傾斜角AOI)を検出する勾配検出手段(傾斜角センサ25)と、検出された路面の勾配に応じて、内燃機関3の再始動時における再始動時目標回転数NECMDRSTを設定する目標回転数設定手段(ECU2、図8のステップ62,64,65)と、内燃機関3の回転数(エンジン回転数NE)が設定された再始動時目標回転数NECMDRSTになるように、内燃機関3の出力(燃料噴射量QINJ)を制御する出力制御手段(ECU2、図8のステップ66)と、再始動条件の成立後に制動装置の制動を解除する制動解除タイミング(解除終了時間TBRKOFF)を、路面の勾配に応じて設定する制動解除タイミング設定手段(ECU2、図9のステップ72,76,79)と、を備えることを特徴とする。
【0010】
この内燃機関は、車両に搭載されており、所定の停止条件が成立したときに停止されるとともに、所定の再始動条件が成立したときに再始動される、いわゆるアイドルストップが行われるものである。また、停止条件が成立しているアイドルストップ中に、制動装置を作動させ、車両を制動する。
【0011】
また、この車両の停止制御装置によれば、アクセルペダルが踏み込まれたときに、再始動条件が成立したと判定し、再始動が行われる。したがって、アイドルストップ中にブレーキペダルが解放されても、アクセルペダルが踏み込まれない限り、アイドルストップが継続されるので、その継続のためにブレーキペダルを踏み続ける必要がなくなる。また、その間の車両の制動は、制動装置によって確保される。
【0012】
また、アイドルストップ中に車両が停止している路面の勾配を検出するとともに、検出された路面の勾配に応じて、再始動時における再始動時目標回転数を設定し、内燃機関の回転数が再始動時目標回転数になるように内燃機関の出力を制御する。さらに、検出された路面の勾配に応じて、再始動条件の成立後に制動装置の制動を解除する制動解除タイミングを設定する。
【0013】
車両が停止している路面の勾配が異なると、再始動の際の発進時における車両の挙動は異なる。したがって、上記のように、検出された路面の勾配に応じて、再始動時目標回転数を設定し、内燃機関の出力を制御することによって、路面の勾配に応じて想定される車両の挙動に適した内燃機関の出力によって、車両を適切に駆動し、発進させることができる。また、検出された路面の勾配に応じて、制動装置の制動解除タイミングを設定することによって、車両の挙動に適したタイミングで制動装置の制動を解除することができる。
【0014】
以上のように、内燃機関の再始動時に、内燃機関の出力と、制動装置による車両の制動を解除するタイミングを適切に制御でき、それにより、車両の円滑な発進と燃費の向上を実現することができる。
【0015】
請求項2に係る発明は、請求項1に記載の車両の停止制御装置1において、検出された路面の勾配が下り勾配であるときには、平坦であるときと比較し、目標回転数設定手段は、再始動時目標回転数NECMDRSTをより小さな値に設定し(図8のステップ62)、制動解除タイミング設定手段は、制動解除タイミングをより早いタイミングに設定する(図9のステップ72)ことを特徴とする。
【0016】
この構成によれば、アイドルストップ中に検出された路面の勾配が下り勾配であるときには、平坦であるときと比較し、再始動時目標回転数をより小さな値に設定するとともに、制動解除タイミングをより早いタイミングに設定する。アイドルストップ中の車両が停止している路面が下り勾配の場合には、その後に内燃機関が再始動される際に、内燃機関の出力が立ち上がっていなくても、制動装置による車両の制動を解除すると、車両は自重により前進する。したがって、制動装置による制動をより早いタイミングで解除することによって、制動状態での車両の発進(ブレーキの引きずり)を回避でき、車両の発進を円滑に行えるとともに、燃費を向上させることができる。
【0017】
また、下り勾配では、車両の発進に必要な内燃機関の出力は、平坦な場合よりも小さい。したがって、検出された路面の勾配が下り勾配のときに、再始動時目標回転数をより小さな値に設定し、内燃機関の出力を低減することによって、過大な出力による急発進を防止しながら、下り勾配での車両の発進を円滑に行えるとともに、燃費をさらに向上させることができる。
【0018】
請求項3に係る発明は、請求項1に記載の車両の停止制御装置1において、検出された路面の勾配が上り勾配であるときには、平坦であるときと比較し、目標回転数設定手段は、再始動時目標回転数NECMDRSTをより大きな値に設定し(図8のステップ65)、制動解除タイミング設定手段は、制動解除タイミングをより遅いタイミングに設定する(図9のステップ79)ことを特徴とする。
【0019】
この構成によれば、アイドルストップ中に検出された路面の勾配が上り勾配であるときには、平坦であるときと比較し、再始動時目標回転数をより大きな値に設定するとともに、制動解除タイミングをより遅いタイミングに設定する。アイドルストップ中の車両が停止している路面が上り勾配の場合には、その後に内燃機関が再始動される際に、内燃機関の出力が立ち上がる前に制動装置による車両の制動を解除すると、車両は自重により後退するおそれがある。したがって、制動装置による制動をより遅いタイミングで解除することによって、内燃機関の出力が立ち上がった後に制動を解除することができ、発進時の車両の後退を防止することができる。
【0020】
また、上り勾配では、車両の発進に必要な内燃機関の出力は、平坦な場合よりも大きい。したがって、検出された路面の勾配が上り勾配のときに、再始動時目標回転数をより大きな値に設定し、内燃機関の出力をより増大させることによって、発進時のもたつきを防止しながら、上り勾配での車両の発進を円滑に行うことができる。
【0021】
請求項4に係る発明は、請求項1に記載の車両の停止制御装置1において、車両Vの速度(車速VP)を検出する車速検出手段(車速センサ22)と、アクセルペダルの開度(アクセル開度AP)を検出するアクセル開度検出手段(アクセル開度センサ23)と、をさらに備え、出力制御手段は、再始動条件が成立した後、その後の経過時間(タイマ値TMST)が所定時間TREF以上のとき、検出された車両Vの速度が所定速度VREF以上のとき、または検出されたアクセルペダルの開度が所定開度APREF以上のときに、アクセルペダルの開度に応じて内燃機関3の出力を制御する(図4のステップ10,11,12,14)ことを特徴とする。
【0022】
この構成によれば、内燃機関の再始動条件が成立した後、以下の条件が成立したときには、内燃機関の出力の制御を、再始動時目標回転数に代えて、アクセルペダルの開度に応じて行う。すなわち、検出されたアクセルペダルの開度が所定開度以上であるときには、運転者による発進時の加速要求が高いとして、アクセルペダルの開度に応じて内燃機関の出力を制御する。これにより、運転者の加速要求に良好に応えながら車両を発進させることができ、ドライバビリティを向上させることができる。
【0023】
また、再始動条件が成立した後の経過時間が所定時間以上のとき、または検出された車両の速度が所定速度以上のときには、車両の発進が終了し、通常の走行に移行したとして、アクセルペダルの開度に応じて内燃機関の出力を制御する。これにより、車両の発進から通常の走行に円滑に移行することができる。
【図面の簡単な説明】
【0024】
【図1】本実施形態による停止制御装置を適用した車両を概略的に示す図である。
【図2】停止制御装置のブロック図である。
【図3】パーキングブレーキの概略構成を示す断面図である。
【図4】車両の制御処理を示すフローチャートである。
【図5】内燃機関の停止条件判定処理を示すフローチャートである。
【図6】再始動時制御処理を示すフローチャートである。
【図7】勾配判定処理を示すフローチャートである。
【図8】内燃機関の出力制御処理を示すフローチャートである。
【図9】ブレーキパラメータの設定処理を示すフローチャートである。
【図10】パーキングブレーキの解除制御処理を示すフローチャートである。
【図11】制御処理によって得られる動作例を、車両が停止した路面が平坦である場合について示すタイミングチャートである。
【図12】制御処理によって得られる動作例を、車両が停止した路面が下り勾配である場合について示すタイミングチャートである。
【図13】制御処理によって得られる動作例を、車両が停止した路面が上り勾配である場合について示すタイミングチャートである。
【発明を実施するための形態】
【0025】
以下、図面を参照しながら、本発明の好ましい実施形態を詳細に説明する。図1は、本実施形態による車両の停止制御装置1を適用した車両Vを概略的に示している。同図に示すように、車両Vは、左右の前輪WF,WFおよび後輪WR,WRを有する前輪駆動式の車両であり、その前部に横置きに搭載された内燃機関(以下「エンジン」という)3と、エンジン3の動力を変速するための自動変速機4などを備えている。
【0026】
エンジン3は、ガソリンエンジンであり、その出力は、燃料噴射弁8(図2参照)から供給される燃料噴射量QINJに応じて制御される。自動変速機4は、エンジン3の出力軸に連結されたトルクコンバータと、「1,2,3,D4,D5,N,R,P」からなる8つのシフトポジションを選択可能なシフトレバーと、1〜5速位置およびリバース位置からなる6種類の変速段に切換可能なギヤ機構などを備えている(いずれも図示せず)。
【0027】
自動変速機4のトルクコンバータの出力軸(図示せず)は、終減速機構5および左右のドライブシャフト6,6を介して、前輪WF,WFに連結されており、それにより、エンジン3の動力が前輪WF,WFに伝達される。
【0028】
各前輪WFおよび各後輪WRには、車両Vを制動するためのフットブレーキ50が設けられている。このフットブレーキ50は、ディスクタイプのものであり、各前輪WFおよび後輪WRと一体のディスク51と、その両側に配置された一対のブレーキパッド(図示せず)と、油圧回路(図示せず)を有している。運転者によってブレーキペダル(図示せず)が踏まれると、油圧回路から供給された油圧により、前輪WFおよび後輪WRのそれぞれにおいて、ブレーキパッドが作動し、ディスク51を挟むことによって、車両Vが制動される。フットブレーキ50の制動力FFBRKは、ブレーキペダルの踏み込み量が大きいほど、より大きくなる。
【0029】
さらに、各後輪WRには、上述したフットブレーキ50とは別個に作動する電動式のパーキングブレーキ60が設けられている。図3に示すように、パーキングブレーキ60は、車体に固定されたキャリパボディ61と、キャリパボディ61内に固定されたナット62と、キャリパボディ61内に左右方向に延び、ナット62にねじ込まれた長ねじ63と、一対のブレーキパッド64a,64bと、モータ65を有している。
【0030】
キャリパボディ61には、長ねじ63の一端側に隣接するように凹部61aが形成されており、この凹部61aに前記一対のブレーキパッド64a,64bが収容されている。一方のブレーキパッド64aは、凹部61aの壁面に固定されており、他方のブレーキパッド64bは、長ねじ63の一端部に取り付けられている。両ブレーキパッド64a,64bは、互いに対向しており、それらの間にディスク51が配置されている。
【0031】
長ねじ63の他端部には、モータ65の回転軸65aが固定されており、モータ65は、キャリパボディ61に固定されたカバー66によって覆われている。モータ65は、後述するECU2に接続されており、その動作は、ECU2からの制御信号によって制御される。
【0032】
以上の構成により、モータ65を正転させると、長ねじ63が回転しながらディスク51側(同図の左方向)に移動し、それに伴い、長ねじ63と一体に移動するブレーキパッド64bとブレーキパッド64aとの間にディスク51を挟み付けることによって、後輪WRを制動する。このときのパーキングブレーキ60の制動力FPBRKは、ブレーキパッド64a,64bの押し付け量に応じて定まり、押し付け量は、ECU2によりモータ65の回転角を制御することによって制御される。
【0033】
一方、その状態からモータ65を逆転させると、ブレーキパッド64bが長ねじ63と一体にモータ65側に移動することによって、後輪WRの制動が解除される。
【0034】
また、エンジン3のクランクシャフト3aには、クランク角センサ21が設けられている(図2参照)。クランク角センサ21は、クランクシャフト3aの回転に伴い、所定のクランク角(例えば30゜)ごとに、パルス信号であるCRK信号をECU2に出力する。ECU2は、CRK信号に基づき、エンジン3の回転数(以下「エンジン回転数」という)NEを算出する。
【0035】
また、図2に示すように、ECU2には、車速センサ22から、車両の速度である車速VPを表す検出信号が、アクセル開度センサ23から、アクセルペダル(図示せず)の開度(以下「アクセル開度」という)APを表す検出信号が、シフトポジションセンサ24から、シフトレバーのシフトポジションを表す検出信号が、傾斜角センサ25から、車両Vの前後方向の傾斜角AOIを表す検出信号が、それぞれ出力される。
【0036】
さらに、ECU2には、電流電圧センサ26から、スタータ41の電源であるバッテリ(図示せず)に入出力される電流・電圧を表す検出信号が出力される。ECU2は、この検出信号に基づいて、バッテリの充電残量(以下「バッテリ残量」という)SOCを算出する。
【0037】
また、ECU2には、イグニッションスイッチ31から、そのオン/オフ状態を表す検出信号が出力され、ブレーキスイッチ32から、ブレーキペダルのオン/オフ状態を表す検出信号が出力される。なお、エンジン3が停止している状態でイグニッションスイッチ31がオンされると、クランクシャフト3aに連結されたスタータ41が作動することによって、エンジン3がクランキングされ、始動される。また、エンジン3の運転時にイグニッションスイッチ31がオフされると、エンジン3が停止される。
【0038】
また、ECU2は、CPU、RAM、ROMおよび入力インターフェース(いずれも図示せず)などから成るマイクロコンピュータで構成されている。ECU2は、上述した各種のセンサ21〜26およびスイッチ31,32の検出信号に応じ、ROMに記憶された制御プログラムなどに基づいて、エンジン3の各種の制御処理を実行する。
【0039】
なお、本実施形態では、ECU2は、再始動条件判定手段、目標回転数設定手段、出力制御手段、および制動解除タイミング設定手段に相当する。
【0040】
次に、図4〜図13を参照しながら、本発明の実施形態による車両Vの制御処理について説明する。この制御処理は、エンジン3のアイドルストップとそれからの再始動を主に制御するものであり、所定時間ごとに実行される。
【0041】
図4はそのメインルーチンを示す。本処理ではまず、ステップ1(「S1」と図示。以下同じ)において、エンジン3の停止条件判定処理を実行する。図5はそのサブルーチンを示す。本処理ではまず、ステップ21〜27において、以下の条件(a)〜(g)が成立しているか否かをそれぞれ判別する。
(a)イグニッションスイッチ(SW)31がオン状態であること
(b)エンジン回転数NEが所定値NEISTP以上であること
(c)車速VPが所定値VPREF以下であること
(d)アクセル開度APがほぼ0であること
(e)シフトポジション(SP)がP,R,N以外であること
(f)ブレーキスイッチ(SW)32がオン状態であること
(g)バッテリ残量SOCが所定値SOCISTP以上であること
【0042】
これらの条件(a)〜(g)がすべて成立しているときには、停止条件が成立していると判定し、そのことを表すために、ステップ28において、アイドルストップフラグF_IDLSTPを「1」にセットし、本処理を終了する。エンジン3の運転中にアイドルストップフラグF_IDLSTPが「1」にセットされると、エンジン3を自動停止させるアイドルストップが開始される。
【0043】
一方、ステップ21〜27の答のいずれかがNOで、条件(a)〜(g)のいずれかが成立していないときには、停止条件が成立していないと判定し、そのことを表すために、ステップ29において、アイドルストップフラグF_IDLSTPを「0」にセットし、本処理を終了する。
【0044】
図4に戻り、ステップ1に続くステップ2では、アイドルストップフラグF_IDLSTPが「1」であるか否かを判別する。この答がYESで、アイドルストップ中のときには、ステップ3において、アクセル開度APが所定の始動用開度APST以上であるか否かを判別する。この答がNOのときには、アイドルストップ制御を実行する(ステップ4)ことによって、アイドルストップを継続し、本処理を終了する。
【0045】
一方、上記ステップ3の答がYESで、AP≧APSTのときには、アイドルストップを終了すべきであると判定し、アイドルストップフラグF_IDLSTPを「0」にリセットし(ステップ5)、再始動フラグF_RESTARTを「1」にセットする(ステップ6)とともに、アップカウント式の再始動タイマのタイマ値TMRSTを0にリセットする(ステップ7)。
【0046】
次に、ステップ8において、エンジン3を再始動させるための再始動時制御処理を実行し、図4の処理を終了する。図6は再始動時制御処理のサブルーチンを示す。本処理ではまず、ステップ41において、再始動フラグの前回値F_RESTARTZが「1」であるか否かを判別する。この答がNOで、再始動時制御を開始した直後のときには、ステップ42〜44において、勾配判定処理、出力制御処理およびブレーキパラメータ設定処理を実行した後、後述するステップ45に進む。一方、上記ステップ41の答がYESで、再始動時制御の開始直後でないときには、ステップ42〜44をスキップしてステップ45に進む。
【0047】
図7は、ステップ42で実行される勾配判定処理を示す。本処理ではまず、ステップ51において、傾斜角センサ25で検出された傾斜角AOIが、値0付近の負値である第1所定角度AREFL(例えば−4°)以下であるか否かを判別する。この答がYESのときには、アイドルストップ中に車両Vが停止していた路面(以下「停止路面」という)が下り勾配であると判定し、そのことを表すために、ステップ52において、勾配フラグF_SLPを「1」にセットし、本処理を終了する。
【0048】
一方、上記ステップ51の答がNOで、AOI>AREFLのときには、ステップ53において、傾斜角AOIが、値0付近の正値である第2所定角度AREFH(例えば4°)以上であるか否かを判別する。この答がNOで、AREFL<AOI<AREFHのときには、停止路面が平坦であると判定し、そのことを表すために、ステップ54において、勾配フラグF_SLPを「2」にセットし、本処理を終了する。
【0049】
一方、上記ステップ53の答がYESで、AOI≧AREFHのときには、停止路面が上り勾配であると判定し、そのことを表すために、ステップ55において、勾配フラグF_SLPを「3」にセットし、本処理を終了する。
【0050】
図8は、図6の前記ステップ43で実行されるエンジン3の出力制御処理を示す。本処理ではまず、ステップ61において、勾配フラグF_SLPが「1」であるか否かを判別する。この答がYESで、停止路面が下り勾配のときには、ステップ62において、再始動時目標回転数NECMDRSTを第1所定回転数NEREF1(例えば900rpm)に設定する。
【0051】
一方、上記ステップ61の答がNOのときには、ステップ63において、勾配フラグF_SLPが「2」であるか否かを判別する。この答がYESで、停止路面が平坦のときには、ステップ64において、再始動時目標回転数NECMDRSTを、第1所定回転数NEREF1よりも大きな第2所定回転数NEREF2(例えば1100rpm)に設定する。
【0052】
一方、上記ステップ63の答がNOのとき、すなわち、勾配フラグF_SLPが「3」で、停止路面が上り勾配であるときには、ステップ65において、再始動時目標回転数NECMDRSTを、第2所定回転数NEREF2よりも大きな第3所定回転数NEREF3(例えば1300rpm)に設定する。
【0053】
上記ステップ62、64または65に続くステップ66では、設定された再始動時目標回転数NECMDRSTに応じて燃料噴射量QINJを算出し、本処理を終了する。これにより、燃料噴射量QINJに応じたエンジン3の出力が得られることによって、エンジン回転数NEが再始動時目標回転数NECMDRSTに制御される。
【0054】
図9は、図6の前記ステップ44で実行されるブレーキパラメータの設定処理を示す。このブレーキパラメータは、エンジン3の再始動に伴ってモータ65によりパーキングブレーキ60の制動を解除する際の、解除開始時間TMOTON、解除終了時間TBRKOFF、およびモータ65の回転速度(以下「モータ回転速度」という)ROTMOTを設定するものである。なお、解除開始時間TMOTONおよび解除終了時間TBRKOFFは、エンジン3の再始動時制御の開始時を起点として表される。
【0055】
本処理ではまず、ステップ71において、勾配フラグF_SLPが「1」であるか否かを判別する。この答がYESで、停止路面が下り勾配のときには、解除終了時間TBRKOFFを第1所定時間TBRK1(例えば0.2sec)に、解除開始時間TMOTONを0にそれぞれ設定する(ステップ72,73)。また、それらの設定に見合うように、モータ回転速度ROTMOTを第1所定速度RREF1に設定し(ステップ74)、本処理を終了する。
【0056】
一方、上記ステップ71の答がNOのときには、ステップ75において、勾配フラグF_SLPが「2」であるか否かを判別する。この答がYESで、停止路面が平坦のときには、解除終了時間TBRKOFFを第1所定時間TBRK1よりも大きな第2所定時間TBRK2(例えば0.4sec)に、解除開始時間TMOTONを0にそれぞれ設定する(ステップ76,77)。また、それらの設定に見合うように、モータ回転速度ROTMOTを第1所定速度REF1よりも小さな第2所定速度RREF2に設定し(ステップ78)、本処理を終了する。
【0057】
一方、上記ステップ75の答がNOで、勾配フラグF_SLPが「3」であり、停止路面が上り勾配のときには、解除終了時間TBRKOFFを第2所定時間TBRK2よりも大きな第3所定時間TBRK3(例えば0.6sec)に、解除開始時間TMOTONを所定の遅れ時間TDLY(例えば0.4sec)にそれぞれ設定する(ステップ79,80)。また、それらの設定に見合うように、モータ回転速度ROTMOTを第3所定速度RREF3に設定し(ステップ81)、本処理を終了する。
【0058】
図6に戻り、再始動時制御の開始直後に上記ステップ42〜44の処理を実行した後、または、再始動時制御の開始直後でないときには、ステップ45において、パーキングブレーキ60の解除制御処理を実行し、図6の処理を終了する。
【0059】
図10はそのサブルーチンを示す。本処理ではまず、ステップ91において、図4のステップ7でリセットされた再始動タイマのタイマ値TMRSTが図9のステップ73、77または80で設定された解除開始時間TMOTON以上であるか否かを判別する。この答がNOで、再始動時制御の開始時から解除開始時間TMOTONが経過していないときには、ステップ92において、モータ65を停止状態に維持する。
【0060】
一方、前記ステップ91の答がYESのときには、ステップ93において、タイマ値TMRSTが図9の前記ステップ72、76または79で設定された解除終了時間TBRKOFF以上であるか否かを判別する。この答がNOで、TMOTON≦TMRST<TBRKOFFのとき、すなわち、再始動時制御の開始時からの経過時間が、解除開始時間TMOTONに達した後、解除終了時間TBRKOFFに達するまでは、図9の前記ステップ74、78または81で設定されたモータ回転速度ROTMOTでモータ65を回転させ、本処理を終了する。
【0061】
一方、前記ステップ93の答がYESで、TMRST≧TBRKOFFのとき、すなわち、再始動時制御の開始時から解除終了時間TBRKOFFが経過したときには、ステップ95において、モータ65を停止し、本処理を終了する。
【0062】
以上のようなモータ65の制御により、解除開始時間TMOTONに相当するタイミングで、モータ65が作動し、パーキングブレーキ60の解除が開始される。その後、解除終了時間TBRKOFFに相当するタイミングで、モータ65が停止し、パーキングブレーキ60の解除が終了する。
【0063】
図4に戻り、前記ステップ2の答がNOで、アイドルストップフラグF_IDLSTPが「0」であり、アイドルストップ中でないときには、ステップ9において、再始動フラグF_RESTARTが「1」であるか否かを判別する。この答がYESで、再始動時制御中のときには、ステップ10〜12において、以下の条件(a)〜(c)が成立しているか否かをそれぞれ判別する。
(a)アクセル開度APが所定開度APL(例えば20°)以上であること
(b)再始動タイマのタイマ値TMRSTが所定時間TREF(例えば1sec)以上であること
(c)車速VPが所定速度VREF(例えば3km/h)以上であること
【0064】
これらの条件(a)〜(c)がいずれも成立していないときには、前記ステップ8に進み、再始動時制御を継続し、本処理を終了する。
【0065】
一方、ステップ10の答がYESで、AP≧APLのときには、運転者による発進時の加速要求が高いため、再始動時制御を終了すべきとして、そのことを表すために、ステップ13において、再始動フラグF_RESTARTを「0」にセットするとともに、ステップ14において、通常制御処理を実行し、本処理を終了する。
【0066】
また、上記ステップ11および12の答のいずれかがYESで、再始動時制御の開始時からの経過時間が所定時間TREF以上になったとき、または車速VPが所定速度VREF以上になったときには、車両Vの発進が終了していると推定されるため、再始動時制御を終了すべきとして、前記ステップ13および14を実行し、再始動フラグF_RESTARTを「0」にセットするとともに、通常制御処理を実行する。
【0067】
また、上記のように前記ステップ13が実行された後には、前記ステップ9の答がNOになり、その場合には、前記ステップ14に進み、通常制御処理を実行する。
【0068】
なお、この通常制御処理では、アクセル開度APおよびエンジン回転数NEに応じ、所定のマップ(図示せず)を検索することによって、エンジン3の要求トルクを算出するとともに、算出された要求トルクとエンジン回転数NEに応じて、燃料噴射量QINJが算出される。すなわち、アクセル開度APに応じたエンジン3の出力の制御を実行する。
【0069】
図11〜図13は、これまで説明した車両Vの制御処理によって得られる動作例を示している。図11は、停止路面が平坦で、その傾斜角AOIがAREFL<AOI<AREFHの範囲にある例である。この例では、車両Vが走行している状態から、時点t1において、アクセル開度APが0になるとともに、ブレーキペダルが踏まれており、それに伴い、車速VPおよびエンジン回転数NEが低下し、フットブレーキ50の制動力FFBRKが次第に増加する。
【0070】
そして、停止条件が成立すると(t2)、アイドルストップフラグF_IDLSTPが「1」にセットされることで、アイドルストップが開始され(ステップ4)、エンジン回転数NEが0まで低下する。また、この例では、エンジン回転数NEが0になる直前にブレーキペダルが解放されており、それに伴うフットブレーキ50の制動力FFBRKの低下を補うように、パーキングブレーキ60が作動し(t3)、その制動力FPBRKが一定値まで増加する。
【0071】
その後、アクセルペダルが踏み込まれ、アクセル開度APが始動用開度APST以上になると(t4)、再始動フラグF_RESTARTが「1」にセットされ(ステップ6)、アイドルストップが終了し、エンジン3の再始動時制御が開始される。この再始動の開始の際、停止路面が平坦であると判定され、勾配フラグF_SLPが「2」にセットされる(ステップ54)。
【0072】
また、この路面勾配の判定結果に応じて、再始動時目標回転数NECMDRSTが中程度の第2所定回転数NEREF2に設定される(ステップ64)とともに、解除終了時間TBRKOFFが中程度の第2所定時間TBRK2に、解除開始時間TMOTONが0に、モータ回転速度ROTMOTが第2所定速度RREF2にそれぞれ設定される(ステップ76〜78)。
【0073】
そして、設定された再始動時目標回転数NECMDRSTに応じて燃料噴射量QINJを算出し、それに基づいてエンジン3に燃料を供給することによって、再始動が開始されるとともに、エンジン回転数NEが第2所定回転数NEREF2に向かって上昇する。また、解除開始時間TMOTONが0に設定されることにより、再始動時制御の開始と同時にパーキングブレーキ60のモータ65が第2所定速度RREF2で回転し始め、それに伴い、制動力FPBRKが低下する。
【0074】
そして、再始動時制御の開始時から解除終了時間TBRKOFF(=第2所定時間TBRK2)が経過したときに(t5)、パーキングブレーキ60のブレーキパッド64bがディスク51から引き離されることによって、制動力FPBRKが0になり、パーキングブレーキ60による制動が解除されるとともに、車速VPが0から増加し始める。
【0075】
その後、車速VPが所定速度VREFに達したときに(t6)、再始動フラグF_RESTARTが「0」にセットされ(ステップ13)、再始動時制御が終了するとともに、通常制御が開始される。この通常制御では、燃料噴射量QINJの算出が、アクセル開度APおよびエンジン回転数NEに応じて行われる。
【0076】
図12は、停止路面が下り勾配で、その傾斜角AOI≦AREFLの例である。この例では、時点t11〜t14での動作は、上述した図11の例と基本的に同じである。時点14において、エンジン3の再始動時制御が開始されると、その際、停止路面が下り勾配であると判定され、勾配フラグF_SLPが「1」にセットされる(ステップ52)。
【0077】
また、この路面勾配の判定結果に応じて、再始動時目標回転数NECMDRSTがより小さな第1所定回転数NEREF1に設定される(ステップ62)とともに、解除終了時間TBRKOFFがより小さな第1所定時間TBRK1に、解除開始時間TMOTONが0に、モータ回転速度ROTMOTがより大きな第1所定速度RREF1にそれぞれ設定される(ステップ72〜74)。
【0078】
そして、再始動時目標回転数NECMDRSTに応じて算出した燃料噴射量QINJに基づき、エンジン3に燃料を供給することによって、再始動が開始されるとともに、エンジン回転数NEが第1所定回転数NEREF1に向かって上昇する。また、解除開始時間TMOTONが0に設定されることにより、再始動時制御の開始と同時にパーキングブレーキ60のモータ65が第1所定速度RREF1で回転し始め、それに伴い、制動力FPBRKが低下する。
【0079】
そして、再始動時制御の開始時から解除終了時間TBRKOFF(=第1所定時間TBRK1)が経過したときに(t15)、制動力FPBRKが0になり、パーキングブレーキ60による制動が解除されるとともに、車速VPが0から増加し始める。
【0080】
その後、車速VPが所定速度VREFに達したときに(t16)、再始動フラグF_RESTARTが「0」にセットされ(ステップ13)、再始動時制御が終了するとともに、通常制御が開始される。
【0081】
図13は、停止路面が上り勾配で、その傾斜角AOI≧AREFHの例である。この例では、時点t21〜t24での動作は、上述した図11および図12の例と基本的に同じである。時点24において、エンジン3の再始動時制御が開始されると、その際、停止路面が上り勾配であると判定され、勾配フラグF_SLPが「3」にセットされる(ステップ55)。
【0082】
また、この路面勾配の判定結果に応じて、再始動時目標回転数NECMDRSTが第2所定回転数NEREF2よりも大きな第3所定回転数NEREF3に設定される(ステップ65)とともに、解除終了時間TBRKOFFが第2所定時間TBRK2よりも大きな第3所定時間TBRK3に、解除開始時間TMOTONが所定の遅れ時間TDLYに、モータ回転速度ROTMOTが第3所定速度RREF3にそれぞれ設定される(ステップ79〜81)。
【0083】
そして、再始動時目標回転数NECMDRSTに応じて算出した燃料噴射量QINJに基づき、エンジン3に燃料を供給することによって、再始動が開始されるとともに、エンジン回転数NEが第3所定回転数NEREF3に向かって上昇する。また、再始動時制御の開始時から遅れ時間TDLYが経過したときに(t24a)パーキングブレーキ60のモータ65が第3所定速度RREF3で回転し始め、それに伴い、制動力FPBRKが低下する。
【0084】
そして、再始動時制御の開始時から解除終了時間TBRKOFF(=第3所定時間TBRK3)が経過したときに(t25)、制動力FPBRKが0になり、パーキングブレーキ60による制動が解除されるとともに、車速VPが0から増加し始める。
【0085】
その後、車速VPが所定速度VREFに達したときに(t26)、再始動フラグF_RESTARTが「0」にセットされ(ステップ13)、再始動時制御が終了するとともに、通常制御が開始される。
【0086】
なお、上記の3つの例では、車速VPが所定速度VREFに達したときに、再始動時制御から通常制御に移行しているが、その前にアクセル開度APが所定開度APL以上になった場合(ステップ10:YES)、または再始動タイマのタイマ値TMRSTが所定時間TREF以上になった場合(ステップ11:YES)には、その時点で通常制御への移行が行われる。
【0087】
以上のように、本実施形態によれば、アイドルストップ中にアクセル開度APが始動用開度APST以上になったときに、アイドルストップを終了し、エンジンを再始動させる。したがって、アイドルストップ中にブレーキペダルが解放されても、アクセルペダルが踏み込まれない限り、アイドルストップが継続されるので、その継続のためにブレーキペダルを踏み続ける必要がなく、運転者の負担を軽減することができる。また、その間の車両Vの制動は、パーキングブレーキ60によって確保される。
【0088】
また、アイドルストップ中に車両Vが停止していた路面が下り勾配と判定されたときには、解除終了時間TBRKOFFを、路面が平坦であるとき(=第2所定時間TBRK2)よりも小さな第1所定時間TBRK1に設定するので、パーキングブレーキ60の引きずりを回避でき、燃費を向上させることができる。それに加えて、再始動時目標回転数NECMDRSTを、路面が平坦であるとき(=第2所定回転数NEREF2)よりも小さな第1所定回転数NEREF1に設定するので、過大な出力による急発進を防止しながら、下り勾配での車両Vの発進を円滑に行えるとともに、燃費をさらに向上させることができる。
【0089】
また、傾斜角AOIが第2所定角度AREFH以上のときには、路面の勾配が上り勾配であると判定し、解除終了時間TBRKOFFを、路面が平坦であるときの値よりも大きな第3所定時間TBRK3に設定するので、エンジン3の出力が立ち上がった後に、パーキングブレーキ60を解除することができ、発進時の車両Vの後退を防止することができる。また、それに加えて、再始動時目標回転数NECMDRSTを、路面が平坦であるときの値よりも大きな第3所定回転数NEREF3に設定するので、エンジン3の出力をより増大させることができ、発進時のもたつきを防止しながら、上り勾配での車両の発進を円滑に行うことができる。
【0090】
また、再始動時制御の開始時からの経過時間TMRSTが所定時間TREF以上のとき、車速VPが所定速度VREF以上のとき、またはアクセル開度APが所定開度APL以上のときに、再始動時制御から通常制御に移行し、エンジン3の出力を、アクセル開度APに応じて制御するので、運転者の加速要求に良好に応えながら車両Vを発進させることができ、ドライバビリティを向上させることができる。
【0091】
なお、本発明は、説明した実施形態に限定されることなく、種々の態様で実施することができる。例えば、実施形態では、傾斜角AOIを用いて、路面の勾配が、下り勾配、平坦または上り勾配のいずれであるかを判定し、その判定結果に応じて、再始動時目標回転数NECMDRSTおよび解除終了時間TBRKOFFをステップ状に設定しているが、これに限らず、傾斜角AOIに応じて、再始動時目標回転数NECMDRSTおよび解除終了時間TBRKOFFを連続的に設定してもよい。
【0092】
また、実施形態では、アイドルストップ条件が成立しているときにパーキングブレーキ60を作動させることによって車両Vを制動するように制御しているが、これに限らず、例えば、ブレーキペダルを自動的に操作することが可能な機器を設け、その機器をアイドルストップ条件が成立しているときに作動させることによって、車両Vを制動するように制御してもよい。その場合には、アイドルストップの終了後に、解除終了時間TBRKOFFに応じて、ブレーキペダルが自動的に解放される。
【0093】
また、実施形態は、本発明をガソリンエンジンを搭載した車両に適用した例であるが、本発明は、これに限らず、ガソリンエンジン以外のディーゼルエンジンなどの各種のエンジンを搭載した車両にも適用可能である。その他、本発明の趣旨の範囲内で、細部の構成を適宜、変更することが可能である。
【符号の説明】
【0094】
1 停止制御装置
2 ECU(再始動条件判定手段、目標回転数設定手段、出力制御手段、
制動解除タイミング設定手段)
3 内燃機関
22 車速センサ(車速検出手段)
23 アクセル開度センサ(アクセル開度検出手段)
25 傾斜角センサ(勾配検出手段)
60 パーキングブレーキ(制動装置)
V 車両
AOI 傾斜角(車両が停止している路面の勾配)
NECMDRST 再始動時目標回転数
NE エンジン回転数(内燃機関の回転数)
QINJ 燃料噴射量(内燃機関の出力)
TBRKOFF 解除終了時間(制動解除タイミング)
VP 車速(車両の速度)
【特許請求の範囲】
【請求項1】
内燃機関を、所定の停止条件が成立したときに停止させ、所定の再始動条件が成立したときに再始動させるとともに、前記停止条件が成立しているときに制動装置を作動させることによって車両を制動するように制御する車両の停止制御装置であって、
アクセルペダルが踏み込まれたときに、前記再始動条件が成立したと判定する再始動条件判定手段と、
前記車両が停止している路面の勾配を検出する勾配検出手段と、
当該検出された路面の勾配に応じて、前記内燃機関の再始動時における再始動時目標回転数を設定する目標回転数設定手段と、
前記内燃機関の回転数が前記設定された再始動時目標回転数になるように、前記内燃機関の出力を制御する出力制御手段と、
前記再始動条件の成立後に前記制動装置の制動を解除する制動解除タイミングを、前記路面の勾配に応じて設定する制動解除タイミング設定手段と、
を備えることを特徴とする車両の停止制御装置。
【請求項2】
前記検出された路面の勾配が下り勾配であるときには、平坦であるときと比較し、
前記目標回転数設定手段は、前記再始動時目標回転数をより小さな値に設定し、
前記制動解除タイミング設定手段は、前記制動解除タイミングをより早いタイミングに設定することを特徴とする、請求項1に記載の車両の停止制御装置。
【請求項3】
前記検出された路面の勾配が上り勾配であるときには、平坦であるときと比較し、
前記目標回転数設定手段は、前記再始動時目標回転数をより大きな値に設定し、
前記制動解除タイミング設定手段は、前記制動解除タイミングをより遅いタイミングに設定することを特徴とする、請求項1に記載の車両の停止制御装置。
【請求項4】
前記車両の速度を検出する車速検出手段と、
前記アクセルペダルの開度を検出するアクセル開度検出手段と、をさらに備え、
前記出力制御手段は、前記再始動条件が成立した後、その後の経過時間が所定時間以上のとき、前記検出された車両の速度が所定速度以上のとき、または前記検出されたアクセルペダルの開度が所定開度以上のときに、前記アクセルペダルの開度に応じて前記内燃機関の出力を制御することを特徴とする、請求項1に記載の車両の停止制御装置。
【請求項1】
内燃機関を、所定の停止条件が成立したときに停止させ、所定の再始動条件が成立したときに再始動させるとともに、前記停止条件が成立しているときに制動装置を作動させることによって車両を制動するように制御する車両の停止制御装置であって、
アクセルペダルが踏み込まれたときに、前記再始動条件が成立したと判定する再始動条件判定手段と、
前記車両が停止している路面の勾配を検出する勾配検出手段と、
当該検出された路面の勾配に応じて、前記内燃機関の再始動時における再始動時目標回転数を設定する目標回転数設定手段と、
前記内燃機関の回転数が前記設定された再始動時目標回転数になるように、前記内燃機関の出力を制御する出力制御手段と、
前記再始動条件の成立後に前記制動装置の制動を解除する制動解除タイミングを、前記路面の勾配に応じて設定する制動解除タイミング設定手段と、
を備えることを特徴とする車両の停止制御装置。
【請求項2】
前記検出された路面の勾配が下り勾配であるときには、平坦であるときと比較し、
前記目標回転数設定手段は、前記再始動時目標回転数をより小さな値に設定し、
前記制動解除タイミング設定手段は、前記制動解除タイミングをより早いタイミングに設定することを特徴とする、請求項1に記載の車両の停止制御装置。
【請求項3】
前記検出された路面の勾配が上り勾配であるときには、平坦であるときと比較し、
前記目標回転数設定手段は、前記再始動時目標回転数をより大きな値に設定し、
前記制動解除タイミング設定手段は、前記制動解除タイミングをより遅いタイミングに設定することを特徴とする、請求項1に記載の車両の停止制御装置。
【請求項4】
前記車両の速度を検出する車速検出手段と、
前記アクセルペダルの開度を検出するアクセル開度検出手段と、をさらに備え、
前記出力制御手段は、前記再始動条件が成立した後、その後の経過時間が所定時間以上のとき、前記検出された車両の速度が所定速度以上のとき、または前記検出されたアクセルペダルの開度が所定開度以上のときに、前記アクセルペダルの開度に応じて前記内燃機関の出力を制御することを特徴とする、請求項1に記載の車両の停止制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−23149(P2013−23149A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−162308(P2011−162308)
【出願日】平成23年7月25日(2011.7.25)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月25日(2011.7.25)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]