
車両の制動保持と発進を制御する車両の制駆動制御装置
【課題】ブレーキホールド制御とクリープカット制御との実行後に燃費の向上・排ガス抑制の目的を達成しつつ速やかに且つ発進時に衝撃・騒音が抑制されるよう車両を発進させる車両の制駆動制御装置を提供すること。
【解決手段】本発明の車両の制駆動制御装置は、運転者による制動操作が解除された後にも車輪の制動力の保持するための制動力保持制御手段と、車輪の制動力の保持制御の実行中に車輪へ伝達される駆動トルクを低減する駆動トルク制御手段と、車両の発進が予測されるか否かを検出する発進予測検出手段とを含む。駆動トルク制御手段は、発進予測検出手段が車両の発進の予測を検出したことに応答して制動力の保持の解除が実行される時までに低減されていたトルクを増大する。
【解決手段】本発明の車両の制駆動制御装置は、運転者による制動操作が解除された後にも車輪の制動力の保持するための制動力保持制御手段と、車輪の制動力の保持制御の実行中に車輪へ伝達される駆動トルクを低減する駆動トルク制御手段と、車両の発進が予測されるか否かを検出する発進予測検出手段とを含む。駆動トルク制御手段は、発進予測検出手段が車両の発進の予測を検出したことに応答して制動力の保持の解除が実行される時までに低減されていたトルクを増大する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車等の車両の制動及び発進を制御する車両の制駆動制御装置に係り、より詳細には、車両を制動保持制御(ブレーキホールド制御)による制動力保持状態から発進させる際の制動装置及び駆動装置の作動を制御する装置に係る。
【背景技術】
【0002】
自動車等の車両の運転支援制御の分野に於いて、走行中の車両が制動されて停車した際に、ブレーキペダルの踏込みが緩んでも車輪の制動力を保持する制御(「ブレーキホールド(BH)制御」。「ヒルホールド制御」などと呼ばれることもある。)が提案され、既に実際の車両に搭載されている。BH制御に於いては、例えば、油圧式の電子制御制動(ECB)システムの場合、ブレーキペダルが所定量以上踏込まれると、各輪の制動装置に設けられるホイールシリンダ内の圧力(制動圧)が低減しないように各輪のホイールシリンダからオイルリザーバの流路が遮断され、これにより、ブレーキペダルの踏込みが緩んでも各輪の制動力が保持された状態が維持されることとなる(制動力保持状態は、通常、アクセルペダルの踏込み操作等に応答して、自動的に解除される。)。かかるBH制御によれば、渋滞時や信号待ちなど、車両の停止や発進が繰り返されるとき或いは車両が坂道で停止したときに、車両のクリープ現象又は重力によるずり下がりなど、運転者の意図しない車両の動きを抑制することが可能となる。また、特に、近年、自動車の排ガス低減と燃費の向上の目的で、車両の一時停止時にエンジンの出力の低減若しくは停止制御又は動力伝達装置の無効化(エンジン又はモータから車輪へのトルク伝達経路の遮断)によるクリープカット制御が実行されるところ(以下、エンジン停止の場合も含めて、「クリープカット制御」と称する。)、そのクリープカット制御中に車両を確実に静止させるために、BH制御が併用されるようになっている。
【0003】
上記の如く、車両の一時停止中に、BH制御と、クリープカット制御等の車輪への駆動トルクの伝達の抑制又は阻止を行う制御とを実行する場合、車両を再発進させるときには、BH制御による制動力保持状態の解除と駆動トルクの伝達の開始及び増大とが実行されることとなる。その際の制動力の低減と駆動トルクの増大のタイミングがずれると、車両の飛び出し感が生じたり(相対的に制動力の低減又は解除が早い場合)、或いは、スムーズな発進ができなかったり(相対的に制動力の低減又は解除が遅い場合)することがある。そこで、従来より、制動力保持状態の解除と駆動トルクの増大のタイミングを図るための制御が種々提案されている。例えば、特許文献1では、車両の一時停止時にエンジンを停止する制御に於いて、運転者のブレーキペダルの踏込みの解除に応答してエンジンを再始動して車両を再発進するときに、クリープ力の増大とともに制動力を徐々に低減することが提案されている(この場合、主として、車両の飛び出し感と急な坂道に於けるずりさがりが防止される。)。また、特許文献2では、運転者のブレーキペダルの踏み戻しの際のペダルの戻し速度を参照し、戻し速度が速いときには、クリープトルクの伝達を早めに開始することが提案されている。更に、特許文献3では、アクセルペダルの踏込みに応答してBH制御が解除される構成に於いて、運転者によるブレーキペダルからアクセルペダルの踏み換えに要する時間を予め計測し、アクセルペダルの踏込み開始時には、ブレーキ圧の低減が開始されるようにする制御(ただし、アクセルペダルの踏込みからブレーキ圧の低減開始までの遅れを防止する制御)が開示されている。
【特許文献1】特開2000−313253
【特許文献2】特開2004−52919
【特許文献3】特開2005−22535
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記の従来のBH制御及びクリープカット制御の解除から車両の発進に至る制御では、基本的には、運転者のブレーキペダルの踏込みの解除をきっかけにエンジンの始動又はクリープトルクの発生を行いつつ、BH制御による保持された制動力を適切に低減し、アクセルペダルの踏込み操作を行うと同時に、車両が徐行し始めてくれることを期待するものであるということができる。しかしながら、BH制御は、運転者のブレーキペダルの踏込み負担を軽減することを意図した運転支援制御であり、本来、BH状態の解除と車両の発進は、アクセルペダル踏込みに応答して実行されることが好ましい。また、ブレーキペダルの踏込みの解除をきっかけにエンジンの始動又はクリープトルク発生が実行されても、直ちにアクセルペダルの踏込みが実行されるとは限らず、ブレーキペダルの踏込みの解除と共にエンジンの始動又はクリープトルク発生を実行してしまうと、その分、クリープカット制御の目的である燃費の向上と排ガスの抑制が損なわれることとなる(それを避けたければ、運転者は、車両停車中、ブレーキペダルを踏み続ける必要がある。)。
【0005】
しかしながら、一方、アクセルペダルの踏込みをきっかけに、BH制御とともにクリープカット制御の解除を実行する場合には、エンジンの再始動又は動力伝達装置の有効化(エンジン又はモータから車輪へのトルク伝達経路の接続)に時間を要するので、結局、運転者は、発進がスムーズでない又は遅いとの感覚を覚えることとなろう。また、発進がスムーズではないからといって、BH制御とクリープカット制御の解除の解除後に駆動トルクの増大勾配を直ちに大きくすることは避けるべきである。実際の車両に於いては、エンジンの停止又は動力伝達装置の無効化によって、エンジン又はモータから車輪までのトルクの伝達経路が遮断されると、そのトルクの伝達経路中のギア間の係合状態の緩み(トルクを伝達するギア間の歯のかみ合いが緩む)が生ずる。そのようにギア間の係合状態が緩んだ状態からエンジン又はモータから伝達されるトルクを急激に上げると、ギアの歯の間で衝突が起こり、車両に於いて機械的な衝撃及び騒音が生ずることとなる。従って、クリープカット制御の終了時に、かかる機械的な衝撃及び騒音を避けつつ、車輪への駆動トルクを増大するには、まず、駆動トルクを緩やかに上昇してトルクの伝達経路中のギア間の係合状態の緩みを解消し(所謂、“駆動系のガタ詰め”)、トルクの伝達可能な状態を確立する必要がある。また、かかる“駆動系のガタ詰め”の期間は、車輪の制動力も維持されていることが好ましい。つまり、運転者のアクセルペダルの踏込みに応答してクリープカット制御を解除する場合には、少なくとも“駆動系のガタ詰め”の期間の分だけは遅れてしまう。もちろん、クリープカット制御自体実行しなければ、上記の如き“駆動系のガタ詰め”による機械的衝撃/騒音の問題はなく、車両の発進性は向上されることとなるが、その場合には、燃費を向上するという目的が達成されなくなる。即ち、BH制御とクリープカット制御が実行された状態から車両の発進の実行へ移るきっかけを、運転者のペダル操作等に頼る場合には、BH制御の利点を有効に達成し、クリープカット制御の目的とするところの燃費の向上又は排ガス抑制と車両の発進性の向上を両立することは難しそうである。
【0006】
かくして、本発明の一つの課題は、運転者のペダル操作のみに頼らずに、BH制御とクリープカット制御との実行後に速やかに車両を発進させる制御を実行する車両の制駆動制御装置を提供することである。
【0007】
また、本発明のもう一つの課題は、上記の如き車両の制動及び発進を制御する制駆動制御装置であって、クリープカット制御の実行後に車両を発進させるには、“駆動系のガタ詰め”の期間の分だけの遅れがあることを認識した上で、車両の発進性を改善することのできる装置を提供することである。
【0008】
更に、本発明のもう一つの課題は、車両の制動及び発進を制御する制駆動制御装置であって、燃費の向上又は車両の排ガス抑制と車両の(一時停止後の)発進時の“駆動系のガタ詰め”による機械的衝撃/騒音を抑制しつつ車両の発進性の向上することとを両立することのできる装置を提供することである。
【課題を解決するための手段】
【0009】
本発明によれば、端的に述べれば、車両をBH制御による制動力保持状態から発進させる際の制動装置及び駆動装置の作動を制御する車両の制駆動制御に於いて、BH制御の実行中に車両の発進が予測された場合又はBH制御解除の兆候を検出した場合に車輪への駆動トルクの伝達を開始するよう車両の駆動系を制御する装置が提供される。
【0010】
本発明の車両の制駆動制御装置は、一つの態様に於いて、車両の運転者による制動操作が解除された後に於いても車輪の制動力の保持が可能な制動装置の制動力の保持制御を実行する制動力保持制御手段と、制動力保持制御手段による車輪の制動力の保持制御の実行中に車両の駆動系から車輪へ伝達される駆動トルクを低減するよう駆動トルクを制御する駆動トルク制御手段と、車両の発進が予測されるか否かを検出する発進予測検出手段とを含む。発進予測検出手段が車両の発進の予測を検出すると、そのことに応答して駆動トルク制御手段は、制動力保持制御手段による制動力の保持の解除が実行される時までに、低減されていた駆動トルクを増大することを特徴とする。上記の構成に於いて、車両の運転者による制動操作とは、典型的には、ブレーキペダルの踏込み操作である(ペダルの形式でない制動操作子であってもよいことは理解されるべきである。)。また、本発明の制御装置の適用される車両の制動装置は、所謂BH制御の実行可能な制動装置であり、車両の運転者による制動操作が解除されたとしても、直ちに車輪の制動力を低減するのではなく、制動力保持制御手段により任意の態様にて車輪の制動力の低減が指令されるまで制動力を保持できるよう構成されているものであり、典型的には、電子制御制動装置である。
【0011】
本発明の制御装置の適用される車両の駆動系(即ち、エンジン及び/又はモータから変速機、差動歯車装置等を経て車輪へ至る動力装置)は、上記の如く、制動力保持制御手段による制動力保持制御により制動力の保持が実行される間、駆動トルク制御手段の制御によって、車輪へ伝達される駆動トルクが低減されるよう構成される。かかる制動力の保持制御中の駆動トルクの低減制御は、燃費の向上と排ガス抑制を目的として、制動力の保持制御中の駆動系の発生トルクを通常の停車状態(例えば、アイドリング状態)のときよりも更に低減するものであり(従って、ここでの「駆動トルクの低減」は、車両の加減速制御のための駆動トルクの低減を意図しているのではない。)、自動変速機を備えた車両(AT車)の場合、既に述べた如きクリープカット制御であってよい。即ち、上記の本発明の構成に於いて低減される駆動トルクは、AT車の場合、駆動系のクリープトルクであってよく、また、ハイブリッド車又は電気自動車の場合には、駆動系の電動機により発生されるクリープトルク相当のトルクであってよい。実施の形態に於いて、かかる駆動トルクの低減制御は、車両の駆動系から車輪への駆動トルクの伝達を停止することによって為されてよく、かかる駆動トルクの伝達の停止は、車両の駆動装置(エンジン及び/又はモータ)の作動停止又は車両の駆動系から車輪への駆動トルクの伝達経路の遮断(クラッチ又はギアの解放など)のいずれの手法によってもよい(駆動装置の停止をしなくても、車輪への駆動トルクの伝達経路の遮断により駆動負荷が低減し、燃料消費量の節約になる。)。
【0012】
上記の本発明の構成に於いて特徴とするところは、車両の発進が予測されるか否かを検出する発進予測検出手段、即ち、近い将来の時点で車両の発進が実行されることを予測する手段が設けられ、車両に於いてBH制御の如き制動力保持制御とクリープカット制御の如き駆動トルク低減制御とが実行された状態に於いて、発進予測検出手段により車両の発進予測が検出されると、その時点から駆動トルクの増大が開始されるという点である。即ち、本発明によれば、車両の発進予測が為された段階で、駆動トルク低減制御が解除されて、駆動トルクの増大が実行され、これにより、制動力保持制御が解除されるときには、車両の発進準備が既に完了され、車両がスムーズに発進することが期待される。また、従前の如く、運転者の制動操作の解除ではなく、近い将来に車両が発進するとの情報をきっかけに駆動トルクの低減制御を解除するので、運転者が制動操作を解除しても制動力が保持されるという制動力保持制御の機能は確保されると同時に、運転者の制動操作の解除による時期尚早の駆動トルク低減制御の解除の可能性は低くなるので、燃費の向上・排ガス抑制の目的も達成されることとなる。即ち、本発明の構成によれば、車両の発進性の向上と燃費の向上・排ガス抑制との目的が両立されることとなる。
【0013】
上記の本発明の制御装置に於ける発進予測検出手段による車両の発進予測の検出は、典型的には、車両の周囲環境情報、例えば、先行車の有無や相対距離又は相対速度や道路状況(混雑状況、道路信号表示の切り替わりなど)に関する情報に基づいて為されてよい。従って、その場合には、本発明の制御装置は、車両の周囲環境情報を検出する手段、例えば、車載のソナー又はレーダー装置、カメラ装置、ナビゲーションシステム及びその他の通信システム等の車載設備が取得した情報から任意の車両の周囲環境情報を取得又は検出する手段を含んでいてよい。また、或いは、発進予測検出手段による車両の発進予測の検出は、運転者の状態(運転者の視線等)を監視し、その運転者の状態に基づいて運転者が発進操作を開始することを事前に検知することによって為されてもよい。重要なことは、運転者が車両の発進操作を実行するのに先立って駆動トルクの増大を開始することであり、好ましくは、車両の発進操作の開始時に、車両の発進準備が丁度完了した状態にすることである。従って、好適には、発進予測検出手段は、運転者による車両の駆動操作が実行される前に車両の発進の予測を検出する任意の手段であってよく、発進予測検出手段が車両の発進の予測を検出したときには運転者による車両の駆動操作が実行される前であっても駆動トルク制御手段が駆動トルクの増大を開始するよう構成される。
【0014】
上記の車両の発進予測の検出は、当業者にとって任意の手法により為されてよいことは理解されるべきである。実施の形態に於いては、例えば、前記の周囲環境情報が所定距離内に先行車が存在するか否かの情報を含み、発進予測検出手段が所定距離内に存在していた先行車が存在しなくなった又はかかる先行車との距離が空いたと判定されたときに車両が発進すると予測するようになっていてよい(車両の発進予測又はBH解除兆候の検出)。
【0015】
かくして、上記の本発明の制御装置の一つの態様によれば、車両の発進予測の検出に応答して、駆動トルクの増大が開始されるようになっているので、制動力保持制御の解除は、運転者の制動操作の解除によることなく(制動力保持制御の本来の機能が確保され)、運転者による車両の駆動操作、例えば、アクセルペダルの踏込み又は駆動操作子の操作の実行に応答して解除されるようになっていてよい。
【0016】
上記の本発明の制御装置の駆動トルクの増大処理に関して、その駆動トルクの増大の開始時に於ける該駆動トルクの増加勾配は、好ましくは、所定の勾配以下に制限される。既に述べた如く、駆動トルクを一旦低減し、或いは、駆動トルクの車輪への伝達を停止してしまうと、駆動系のトルク伝達経路の各部のギアのかみ合いに緩み(“駆動系のガタ”)が生ずるので、再度、トルクが伝達可能な状態を確立する際には、初期に於いて緩やかに上昇し、まず、“駆動系のガタ詰め”を行わないと、緩んだギアの歯の衝突などにより機械的な衝撃/騒音が発生し、運転者の発進フィーリングを損ねることとなる。そこで、上記の如く、本発明に於いて、低減されていた駆動トルクを増大するときには、好適には、その増大勾配を制限して、急激なトルク上昇が回避されるよう制御される。この点に関し、既に述べた如く、本発明に於ける駆動トルクの増大は、典型的には、運転者の駆動操作に先立って、車両の発進予測の検出をきっかけに開始されるので、運転者の駆動操作が実行される時点では、“駆動系のガタ詰め”が完了しており、従って、保持されていた制動力も速やかに低減されることが許されるので、従前に比して、車両の発進性が向上されることとなる。
【0017】
上記の駆動系のガタ詰めを実行する際の駆動トルクの増大勾配の許容可能な限界値は、車両の駆動系の構成の仕様によって異なるので、駆動トルクの増大勾配を制限するための所定の勾配値は、実験的に或いは理論的に予め決定されよい。或いは、駆動トルクの増大時に騒音や振動の状態を監視しながら調節されてもよいことは理解されるべきである。かかる駆動トルクの増大の開始後、該駆動トルクが所定トルク値(例えば、駆動系のガタ詰めが完了し、駆動トルクが良好に伝達可能な状態になったと判断される値)に達したときには、駆動トルクの増加勾配が所定の勾配以下に制限されることなく駆動トルクの増大が許されるようになっていてよい。
【0018】
上記の如き駆動トルクの増大は、好適には、制動力保持制御手段による制動力の保持の解除が実行される時には、駆動トルクが駆動系のクリープトルク(AT車の場合)又は駆動系の電動機により発生されるクリープトルク相当のトルクと同等の値(ハイブリッド車又は電気自動車の場合)に達しているように実行される。要すれば、ここでの制動力保持制御手段による制動力の保持の解除が実行される時までに達成されているべきクリープトルクとは、クリープカット制御等の駆動トルク低減が実行されなければ、アクセルペダルの踏み込みがなくても発生するトルクであると考えてよく、駆動系のガタ詰めが完了するトルク値、通常のアイドリング状態に於けるトルク値、又は、路面勾配に応じて車両のずり下がりを防止できるトルク値などに適宜設定されてよい。
【0019】
一方、本発明の制御装置による車両の発進時の制動力の低減は、駆動系のガタ詰めが完了し、或いは、駆動トルク値が、駆動系のクリープトルク又はそれに相当する値に達しているときには、速やかに実行されてよい。従って、本発明の制御装置に於いて、制動力保持制御手段による制動力の保持が解除され、制動力の低減が実行される際、駆動トルクが所定のトルク値(例えば、駆動系のガタ詰めが完了した判定されるトルク値又はクリープトルク値)に達しているときには、駆動トルクが、その所定のトルク値に達していないときに比して、制動力の低減勾配が大きくされるようになっていてよい。或いは、駆動トルクが前記の如き所定のトルク値に達していないときには、車両をスムーズに発進できる状態ではない可能性が高いので、そのときには、制動力保持制御手段による制動力の保持の解除が禁止されるようになっていてもよい(ただし、運転者による車両の駆動要求がある場合には、小さな低減勾配にて制動力が低減されてもよい。
【発明の効果】
【0020】
総じて、本発明による制駆動制御装置は、制動力保持制御と駆動トルク低減制御が実行されている状況から車両の発進に至る過程に於いて、車両の発進の準備のための駆動トルクの増大を、運転者による制動操作又は駆動操作とは別の車両発進予測の情報をきっかけに開始することによって、運転者が駆動操作を開始したときには車両が速やかに発進することを可能にするものであるということができる。かかる過程に於いて、運転者は、自身の制動操作を解除しても制動力が保持されるので、制動力保持制御の本来の運転支援機能が担保されるとともに、制動操作を解除しても直ぐに駆動トルクの増大を実行するわけではないので、燃費の向上・排ガス抑制の目的も達成されることとなる。
【0021】
また、車両の発進予測が運転者による駆動操作の前に適切に検出されれば、駆動系のガタ詰めを適切に実行することが可能となり、機械的な衝撃/騒音の発生といった発進時の運転フィーリングの悪化を回避することが可能となる。そして、制動力保持制御の解除時に、駆動系のガタ詰めが適切に完了され、或いは、クリープトルクの回復が成功している場合には、制動力は速やかに低減され、発進のもたつき感の発生を回避できることとなる。かくして、本発明によれば、最も好適な態様に於いては、制動力保持制御と駆動トルク低減制御から車両の発進に移行する際に、発進フィーリングの悪化の防止、車両の発進性の向上、燃費向上と排ガス抑制の、概ね三つの目的を同時に達成できることとなる。
【0022】
本発明のその他の目的及び利点は、以下の本発明の好ましい実施形態の説明より明らかになるであろう。
【発明を実施するための最良の形態】
【0023】
装置の構成
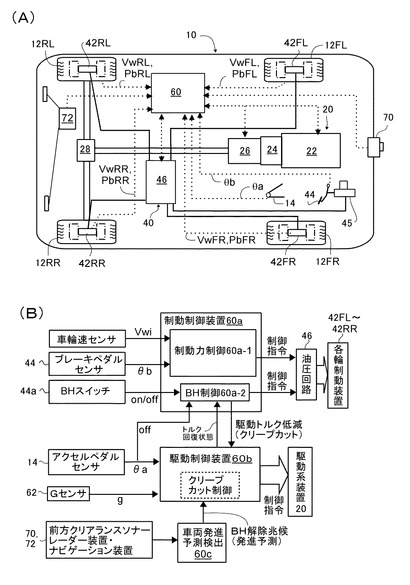
図1(A)は、本発明の制駆動制御装置の好ましい実施形態が搭載される自動車を模式的に示している。同図に於いて、左右前輪12FL、12FRと、左右後輪12RL、12RRを有する車両10には、通常の態様にて、運転者によるアクセルペダル14の踏込みに応じて各輪(図示の例では、後輪駆動車であるから、後輪のみ)に制駆動力を発生する駆動系装置20と、各輪に制動力を発生する制動系装置40とが搭載される。駆動系装置20は、図示の例では、エンジン22から、トルクコンバータ24、自動変速機26、差動歯車装置28等を介して、出力される駆動トルク或いは回転力が後輪12RL、12RRへ伝達されるよう構成されているが、エンジン22に代えて電動機が用いられる電気式、或いは、エンジンと電動機との双方を有するハイブリッド式の駆動系装置であってもよい。なお、簡単のため図示していないが、車両10には、通常の車両と同様に前輪又は前後輪の舵角を制御するためのステアリング装置が設けられる。
【0024】
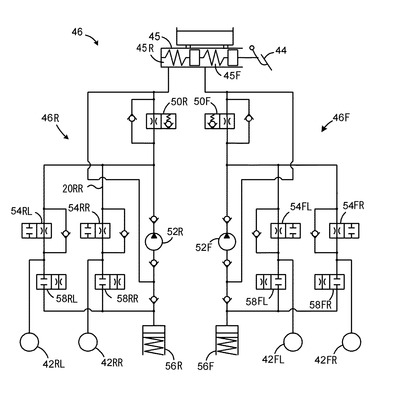
制動系装置40は、運転者によりブレーキペダル44の踏込みに応答して作動されるマスタシリンダ45に連通した油圧回路46によって、各輪に装備をされたホイールシリンダ42FL、42FR、42RL、42RR内のブレーキ圧、即ち、各輪に於ける制動力が調節される形式の電子制御式の油圧式制動装置である。図2は、かかる油圧回路46の内部の配管構成の典型例の模式図を示している。同図を参照して、油圧回路46は、左右前輪の対のホイールシリンダ42FL、42FRのブレーキ圧を制御する回路46Fと、左右後輪の対のホイールシリンダ42RL、42RRのブレーキ圧を制御する回路46Rを含み(特に指摘しない限り、2つの回路は、同じ配管構造を有していてよい。)、通常の作動に於いては、ブレーキペダル44の踏込みに応答して、マスタシリンダ45の圧力が、回路46F、Rを介して、それぞれのホイールシリンダ42i(i=FL、FR、RL、RR)へ供給される。一方、ブレーキホールド制御又はその他の電子制御が実行される場合には、電子制御装置60の指令に基づいて、回路46F、Rのマスタシリンダに直接に接続されたマスタシリンダカット弁50F、50Rが閉弁され、油圧回路内に設けられた油圧ポンプ52F、52Rが作動して、マスタシリンダカット弁50F、50Rと各輪のホイールシリンダ42iとの間の油圧を昇圧する。各輪のホイールシリンダ42iには、それぞれ、油圧ポンプ52F、R側に油圧保持弁54i、バッファリザーバ56F、R側には、減圧弁58iが設けられており、各輪のホイールシリンダの油圧を増圧する際には、油圧保持弁54iが開弁されて、ホイールシリンダがポンプからの圧力を受け入れて伸長し、これにより、車輪の内側にて、図示していないブレーキパッド(摩擦要素)がブレーキディスクに押し付けられることにより制動力が発生され、ブレーキ圧を減圧する際には、減圧弁58iが開弁して、リザーバへ圧力を解放する。
【0025】
特に、ブレーキホールド(BH)制御が実行される場合には、上記の説明から理解される如く、減圧弁58iが閉弁され、各輪のホイールシリンダ42iとバッファリザーバ56F、Rとの連通流路が遮断され、これにより、各輪の制動力が保持される。また、BH制御の解除時には、減圧弁58iが各輪のホイールシリンダの油圧、即ち、ブレーキ圧を減圧する際の勾配(低減勾配)は、この分野に於いてよく知られているように、減圧弁54iの開閉周期に於ける閉弁期間に対する開弁期間の比(開弁デューティ比)を調節することにより制御される。即ち、単位時間当たり又は所定の開閉サイクルの1周期に於ける開弁期間が大きいほど、ブレーキ圧の、従って、制動力の低減勾配が大きくなり、制動力の低減速度が高くなる。なお、制動系装置40は、図示の如き油圧式の制動装置でなく、電磁式に各輪に制動力を与える形式又はその他当業者にとって任意の形式のものであってよい。
【0026】
再び、図1(A)を参照して、駆動系装置20及び制動系装置40の作動は、電子制御装置60により制御される。電子制御装置60は、通常の形式の、双方向コモン・バスにより相互に連結されたCPU、ROM、RAM及び入出力ポート装置を有するマイクロコンピュータ及び駆動回路を含んでいてよい。図に於いては、電子制御装置60には、車両の各部に設けられたセンサから、アクセルペダル踏込量θa、ブレーキペダル踏込量θb、車輪速Vwi(i=FL、FR、RL、RR)、各輪のホイールシリンダ内の圧力Pbi(i=FL、FR、RL、RR)等の検出値が入力されるよう例示されているが、本実施形態の車両に於いて実行されるべき各種制御に必要な種々のパラメータ、例えば、エンジン回転数、吸入空気量、変速機回転数を得るための各種検出信号が入力されてよい。また、運転席のフロントパネルには、BH制御の有効/無効を選択するBHスイッチが設けられる。運転者の選択により、BHスイッチがONのとき、その情報が電子制御装置60へ送信され、BH制御により、制動力保持状態が達成される。更に、図1(A)には、図示していないが、電子制御装置60には、Gセンサからの信号が入力され、各種の走行制御に用いられるようになっていてよい(本発明の制駆動制御装置では、後述の如く、クリープトルクの生成時の駆動トルクの目標値の算出に用いられる。)。
【0027】
また更に、本発明の制御装置が適用される車両10には、車両の周辺環境情報を取得する手段として、車両の前方の障害物・先行車両、レーン形状等を認識するための検出器(ビデオカメラ、レーダー装置、前方クリアランスソナー装置等)70と、GPS人工衛星と通信して種々の情報を取得するカーナビゲーションシステム72が設けられている。ビデオカメラ又はレーダー装置等70の検出データは、電子制御装置60内のデータ解析装置へ送信され、任意の公知の手法にて車両前方の障害物の有無とその位置(自車両からの相対距離・相対速度と方向)に関する情報を生成するために用いられる。一方、カーナビゲーションシステムは、自車両の位置(緯度、経度)・車体の向き、走行路の交通量や渋滞の有無等のデータを生成し、それらの情報を電子制御装置60へ送信する。これらの車両の周辺環境情報を取得する手段により取得された情報は、本発明の制御装置に於いては、車両の発進の予測、即ち、停車中の車両が近い将来発進されると予測されるか否かの検出に用いられる。
【0028】
本発明の制駆動制御装置の特徴的な構成及びその作動は、電子制御装置60の内部の構成及びその内部に記憶されたプログラムに従って作動により実現される。図1(B)は、電子制御装置の本発明の制駆動制御に係る構成を機能ブロック図の形式で示したものである。同図を参照して、電子制御装置60に於いては、本発明の制御を実行するために、概して述べれば、制動系装置の作動を制御する制動制御装置60aと、駆動系装置の作動を制御する駆動制御装置60bと、以下に説明される如く、BH制御下、クリープカット制御の実行中に車両の発進の予測、換言すると、BH制御が解除されることとなる兆候(以下、「BH解除兆候」と称する。)を検出するための車両発進予測検出器60cとを含む。
【0029】
制動制御装置60aは、基本的には、ブレーキペダルセンサからのブレーキペダル踏込量θbや車輪速センサ値Vwiに基づいて公知の態様にて油圧回路46を作動して各輪の制動力を制御する(制動力制御部60a−1)。なお、簡単のため図示していないが、各輪の制動力について、対応するブレーキ圧Pbiの実際値に基づいてサーボ制御が実行されてよい。しかしながら、BHスイッチ44aがON状態にされると、BH制御が実行され、ブレーキペダルの踏み戻しが有っても、制動力は低減されず、制動力は保持されるよう制御される(BH制御部60a−2)。これにより、運転者は、ブレーキペダルを踏み続けなくても制動力が維持されることとなるので、運転者の車両の操縦負担が軽減されることとなる。なお、BH制御は、BHスイッチ44aがON状態である他に、任意の条件が成立した場合に実行されるようになっていてもよい。また、BH制御中の制動力の制御、例えば、ブレーキ圧が過剰に大きくならないようにするための制御は、任意に実行されてよい。本実施形態では、BH制御は、アクセルペダルの踏込みがあったときに(例えば、アクセルペダル踏込量θaが所定値以上のとき)、解除され、その後、制動力は後述の態様にて低減される。
【0030】
一方、駆動制御装置60bは、基本的には、アクセルペダルセンサからのアクセルペダル踏込量θaやGセンサ値gに基づいて公知の態様にて駆動系装置20を制御する。しかしながら、BH制御が実行され、任意の所定の条件が成立したとき、例えば、車輪速Vwiの全てが0の状態が所定時間経過したとき及び/又は制動力が所定値以上になったときに、「クリープカット制御」、即ち、車輪トルクへの駆動トルクの伝達を遮断する制御が実行される。かかる駆動トルクの伝達の遮断は、エンジンを停止するか、或いは、自動変速機の変速段をニュートラルに設定するなど、任意の手法により達成されてよい。これにより、車両の停車中の駆動負荷の低減又は駆動トルク発生の中止によって燃料消費量が低減され、燃費の向上、排ガス抑制の目的が達成される。なお、クリープカット制御の実行指令は、制動制御装置から与えるようになっていてもよい。(車輪速センサからの車輪速値、実際の制動力の検出値は、制動制御装置により取得されるため)。
【0031】
上記の如きクリープカット制御の解除又は終了は、本実施形態に於いては、車両発進予測検出部60cからBH解除兆候が駆動制御装置60bへ送信されることに応答して実行される。車両発進予測検出部60cは、前方クリアランスソナー又はレーダー装置70、カーナビゲーションシステム72等の情報に基づいて、典型的には、停止している車両が数秒後に発進されるか否かを判定し、車両が発進されるとの予測が為されたときには、BH解除が為される(アクセルペダルが踏込まれる)兆候ありとして、その情報(BH解除兆候)を駆動制御装置へ送信する。そして、駆動制御装置は、これに応答して、後述の態様にてクリープカット終了制御を実行し、運転者がアクセルペダルを踏込むときまでには、駆動トルクがクリープトルク又はクリープトルク相当のトルク値まで上昇され、速やかに発進される状態にもたらされる。なお、車両発進予測又はBH解除兆候は、当業者にとって任意の手法により為されてよいことは理解されるべきである(一つの検出方法だけでなく、複数の検出方法が同時に用いられ、いずれかの検出方法により、車両発進予測が検出されたときにBH解除兆候ありとしてよい。)。また、車両の外部の状況だけでなく、運転者の顔面等を撮影するビデオカメラ画像を取得し、その画像を任意の手法により画像処理して、運転者がアクセルペダルを踏込むことが数秒後に予測されることを検出し、これにより、BH解除兆候情報を駆動制御装置に送信するようになっていてもよい。
【0032】
駆動制御装置のクリープカット制御の解除処理は、基本的には、運転者がアクセルペダルの踏込みを行う前に完了することが期待される。しかしながら、かかるクリープカット制御解除処理の完了前にアクセルペダルの踏込みが実行される可能性もあり、その場合には、BH制御解除処理に於ける制動力の低減の態様も変更することが好ましい。そこで、駆動制御装置60bから駆動トルクの回復状態に関する情報が制動制御装置60aへ送信されるようになっていることが好ましい。
【0033】
装置の作動
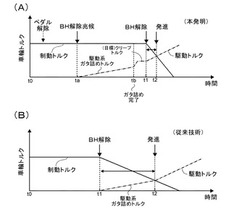
図3は、上記の本発明の制駆動制御装置の構成(及び後述の制御処理過程)により達成されるBH制御とクリープカット制御の解除処理中の制動力(図中、単位は、制動力に車輪半径を乗じたトルクで表示されている。)と駆動トルクの時間変化の例を示している。
【0034】
まず、図3(B)の従来の技術に於けるBH制御とクリープカット制御の解除処理の場合を参照して、従前の場合、BH制御の本来の機能を尊重して、BH制御とクリープカット制御との解除処理がアクセルペダルの踏込みにより同時に開始されるとすると、アクセルペダルの踏込み(BH解除)の時点に於いて、駆動系は、駆動トルクが作用していないので、かみ合いが緩んだ状態、即ち、駆動系に“ガタ”(ギアの歯間の隙間など)が生じている。この場合、かかる“ガタ”が解消されるまで、即ち、“駆動系のガタ詰め”が為される前に、急激に駆動トルクを上昇すると、ギアの歯同士が衝突するなどして、機械的な衝撃や騒音が生ずることとなる。従って、“駆動系のガタ詰め”をする間は、駆動トルクの増大勾配は、図示の如く制限され(駆動系ガタ詰めトルク)、これと同時に、制動トルクも駆動系のガタ詰めが終了するまで、車両の静止状態を保持するために速やかに低減することができない(もし駆動系のガタ詰めの完了前に制動力が消滅すると、車両が不安定となる可能性がある。)。かくして、従前の場合、運転者がアクセルペダルを踏込んでから車両が発進するまでには、少なくとも駆動系のガタ詰めに要する時間の遅れが生ずることとなる。また、実際には、エンジンが停止されていれば、エンジンの再始動等に要する時間の遅れがあるなど、その他の各部の応答遅れが更に追加されることとなる。
【0035】
一方、図3(A)に例示されている如き本発明の制駆動制御装置の場合、クリープカット制御の解除は、前記の如きBH解除兆候があった時点(ta)で開始され、好適には、アクセルペダルの踏込みの時点(t1)の前に、駆動系のガタ詰めの完了(tb)、クリープトルクの回復(tb〜t1)が予め実行されるよう構成される。従って、アクセルペダルの踏込み後(t1〜)、制動力は、速やかに低減することが可能となり、車両は、速やかに発進することが可能となる(t2)。この場合、アクセルペダルの踏込みから車両の発進までの遅れは、保持された制動力が低減されるまで(駆動トルクが制動トルクを超えるまで)の時間となり、従前に比して大幅に短縮されることとなる。
【0036】
なお、「背景技術」の欄に列記された特許文献1〜3は、基本的には、ブレーキペダルの踏込解除に応答して、クリープカット制御の解除処理が実行することを提案している。確かに、これらの場合、アクセルペダルの踏込み時には、車両の発進準備が完了させることが可能であるが、逆に、車両の発進の数秒前まで、BH解除兆候が検出時点まで、運転者がブレーキペダルを踏み続けていないと、駆動トルクが早期に発生し、その分、燃費の向上と排ガス抑制を期待できなくなる。また、ブレーキペダルの踏込みの解除後であって駆動系のガタ詰めの完了前にアクセルペダルを踏んだり、ブレーキペダルの踏込みの解除前にアクセルペダル踏むなどした場合には、結局、図3(A)と同様の状況となる。一方、本発明の場合には、BH制御が作動している間は、ブレーキペダルの踏込みは、運転者の任意で解除されてもよく、また、BH解除兆候は、アクセルペダルの踏込みがあると予測される数秒前を検出するので、その精度が良ければ、アクセルペダルの踏込みの時点に、ブレーキペダルの踏込みがいつ解除されたかによらず、車両の発進準備が完了できることとなる。
【0037】
図4〜6は、それぞれ、上記の本発明のBH制御とクリープカット制御の実行中から車両の発進へ至る過程を実現するための制動制御装置、車両発進予測部、駆動制御装置の制御処理をフローチャートの形式で表したものである。それぞれの制御処理は、車両の運転中、所定の周期にて繰り返し実行される。
【0038】
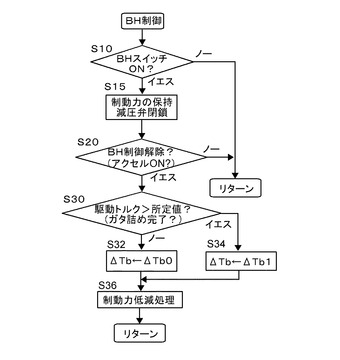
まず、図4は、制動制御装置に於けるBH制御の実行及び解除の制御処理を表している。かかる制御処理では、まず、BHスイッチがONであるか否か及びその他の任意に設定されてよい条件が成立しているか否かが判定される(ステップ10)。BHスイッチがON或いはその他のBH制御実行の条件が成立しているときには、制動力の保持制御が実行される(ステップ15)。そして、制動力保持状態は、運転者がアクセルペダルの踏込みを実行するまで維持される(ステップ20)。
【0039】
かくして、サイクルが繰り返されるうち(この間に別の制御処理により、クリープカット制御が実行される。)、運転者がアクセルペダルの踏込みを実行すると(アクセルON)、BH制御解除処理が実行される(ステップ30−36、図3の時点t1)。かかるBH制御解除処理では、現在の駆動トルクが参照され(エンジン回転数、吸入空気量等を用いて公知の態様にて推定されるか、又はトルクセンサ等により検出されてよい。)、駆動トルクが所定値、即ち、駆動系のガタ詰めが完了する駆動トルクに達しているか否かが判定される(ステップ30)。本発明の制御によれば、図3に関連する説明に於いて記載されているように、好適には、BH制御が解除される段階で、駆動系のガタ詰めは完了され、クリープトルクが回復していることが期待される。しかしながら、かかる処理が成功裡に完了していない場合に備えて、駆動トルクが所定値に到達しているか否かにより、制動力の低減勾配(1周期に於ける制動力の低減量)が変更される。かくして、駆動トルクが所定値に到達していなければ、駆動系のガタ詰め中であると判断し、今回のサイクルの制動力の低減量ΔTbは、任意に設定される小さな値ΔTb0に設定され(ステップ32)、駆動トルクが所定値に到達していれば、駆動系のガタ詰めが完了していると判断され、制動装置に於いて達成可能な任意に設定される大きな値ΔTb1(>ΔTb0)に設定される(ステップ31)。そして、かかる駆動トルクの回復状態に応じて設定された低減量にて制動力の低減が実行される(ステップ36)。図4の制御によれば、図3(A)に示されている如く、BH制御の実行開始後、アクセルペダルの踏込みがあったときに、BH制御が実行され、その際、駆動トルクが十分に回復していれば、図示の如く制動力は、速やかに低減されることとなる。なお、ΔTb0=0として、ガタ詰め完了までは、制動力の低減が実行されないようにしてもよい。
【0040】
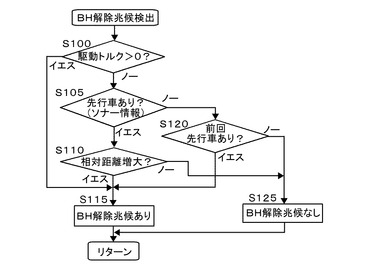
図5は、車両発進予測検出部に於けるBH解除兆候検出の制御処理のうち、特に、前方クリアランスソナー装置による情報を用いて先行車の有無を判定して車両発進予測を検出する制御処理について例示したものである。同図を参照して、かかる制御処理では、まず、駆動トルクが0より大きいか否かが判定される。駆動トルク>0が成立しているときには、クリープカット制御が実行されていないか又は後述のクリープカット制御の終了処理の実行中であるので、形式的に(本来、この時点では、BH解除兆候の有無を判定する必要はない。)車両の発進が予測される、即ち、BH解除兆候ありと判定される(ステップ100、115)。一方、駆動トルクが発生していないときは、ソナー情報に基づき、先行車が所定距離内に存在するか否かが判定される(ステップ105)。かかる所定距離は、その先行車と自車の距離が離れると、運転者が車両の発進をすると予測される予め定められた最大の距離であり、実験的又は理論的に任意に設定されてよい。先行車が前記の所定距離内に存在している場合、先行車との相対距離が増大しているか否かが判定される(ステップ110)。もし今回のサイクルの先行車との相対距離が前回のサイクルの値(図示の制御処理は、繰り返し実行されている。)よりも増大している場合には、距離が空き、運転者が車両の発進をすると予測されるので、BH解除兆候ありと判定され(ステップ115)、相対距離の増大が見られない場合には、BH解除兆候なしと判定される(ステップ125)。なお、相対距離の増大の有無の判定については、相対距離が予め定められた値以上増大したときに、相対距離が増大したと判定されるようになっていてよい。
【0041】
一方、ステップ105で、先行車がなしと判定された場合には、前回のサイクルで先行車があったか否かが判定される。前回のサイクルで所定距離内に先行車があり、今回のサイクルでその先行車がない場合には、車両の前方が空いて、車両が発進されることが予測されるので、その場合には、BH解除兆候ありと判定される(ステップ115)。しかしながら、前回も先行車がないときには、判定が不能なので、BH解除兆候なしと判定される(ステップ125)。この場合、別の手法によるBH解除兆候の検出があるか又はアクセルペダルの踏込みにより、クリープカット制御が解除されることとなる(図6参照)。なお、既に述べた如く、車両の発進予測は、他の任意の手法によりなされてよく、図5の手法に限定されないことは、留意されるべきである。
【0042】
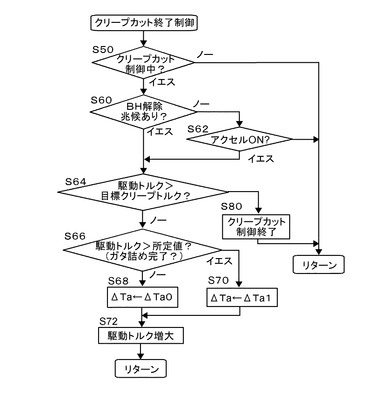
図6は、駆動制御装置に於いて、クリープカット制御が実行され、車輪への駆動トルクの伝達が停止した状態から、再度、駆動トルクの伝達を開始する際の制御処理(クリープカット終了制御)を表している。同図の処理は、実質的には、クリープカット制御中のときに所定の周期で繰り返されるようになっていてよい(ステップ50)。
【0043】
図6の制御処理に於いては、クリープカット制御中に於いて、図5の制御処理によるBH解除兆候ありの判定(ステップ60)か、或いは、運転者によるアクセルペダルの踏込み(“アクセルON”、ステップ62)のいずれかの事象の発生が監視される。図3に関連した説明に於いて記載されているように、本発明の制御では、基本的には、BH解除兆候の検出を待ってクリープカット制御が解除されるが、BH解除兆候の検出が不能であったり、又は、BH解除兆候が検出される前にアクセルペダルの踏込みが為される場合も有り得る。そこで、上記の如く、“アクセルON”状態も監視される。
【0044】
BH解除兆候又はアクセルONのいずれかがあったとき(図3(A)の時点ta)には、図3(A)に於いて例示されている如き態様にて駆動トルクの増大が実行される。かかる処理に於いては、まず、現在の駆動トルクが、後述の態様にて決定される目標クリープトルクに到達しているか否か(ステップ64)、そして、駆動系のガタ詰め完了トルク値に到達しているか否か(ステップ66)が判定される。ここで、目標クリープトルクとは、アクセルペダルの踏込量が実質的に0である状態に、車両の発進前に到達されているべき駆動トルク値である(つまり、クリープカット制御をしないときに、アクセルペダルの踏込みを行わない状態で車輪へ伝達されるクリープトルクの大きさに相当する。)。また、駆動系のガタ詰め完了トルク値は、クリープカット制御により緩んでいた駆動系のギアのガタが解消され、トルクが有効に伝達される状態が確立する駆動トルク値である。
【0045】
なお、ここで、ガタ詰め完了トルク値は、車両の発進時に達成されているべき駆動トルクの最小値であり、目標クリープトルクは、更に、車両の発進時に達成されているべき好適値であるので、目標クリープトルクは、ガタ詰め完了トルク値と同等かそれよりも大きく設定されることは理解されるべきである。ガタ詰め完了トルク値は、車両の駆動系の具体的な構成・仕様により予め実験的に又は理論的には任意に設定されてよい。目標クリープトルクは、ガタ詰め完了トルク値に設定されてもよいが、好ましい一つの例として、路面勾配の関数として、例えば、次の式:
(目標クリープトルク)=(ガタ詰め完了トルク値)+k・g …(1)
(ただし、g<0のとき、g←0に設定)
により決定されてよい。ここで、kは、係数であり、gは、Gセンサ値から与えられる前後方向加速度である。クリープカット中は、車両は静止しているので、g>0のときは、車両は、登坂路上に静止していることとなる。即ち、式(1)によれば、制動力が低減されたとき(t2)の車両のずり落ちを防止するべく、路面の勾配に応じて目標クリープトルクが増大される。
【0046】
現在の駆動トルクがガタ詰め完了トルク値よりも下回っている場合(ta〜tb)には、1サイクル当たりの駆動トルクの増分ΔTaは、機械的な衝撃/騒音を回避する量ΔTa0に設定され、駆動トルクの増大勾配は小さな値に設定される(ステップ68)。なお、クリープカット中は、駆動トルクは車輪へ伝達されていないので、BH解除兆候又はアクセルONが生じた直後から駆動トルクがガタ詰め完了トルク値に到達するまでは、ステップ68により設定された増分にて、駆動トルクの増大が実行される(ステップ72)。しかる後、制御サイクルが繰り返され、駆動トルクがガタ詰め完了トルク値に到達したとき(tb)には、駆動トルクの増大勾配は大きくされてよいので、1サイクル当たりの駆動トルクの増分ΔTaは、ΔTa0よりも大きな(任意に設定される)値ΔTa1に設定される(ステップ70)。
【0047】
更に、制御サイクルが繰り返され、駆動トルクが目標クリープトルクに到達したとき(ステップ64)には、車両の発進準備が完了したこととなり、クリープカット制御が終了したこととなる(ステップ80)。この時点で、駆動トルクの増大は、一旦停止され、それ以降は、通常の運転者によるアクセルの踏込みに応じた駆動トルク制御が実行される。なお、クリープカット終了処理がアクセルONに応答して実行されときには、駆動トルクが目標クリープトルクに到達した時点以降、そのまま通常の運転者によるアクセルの踏込みに応じた駆動トルク制御に移行するようになっていてよい(図3のtb〜t1の間の水平部分がなくなる。)。
【0048】
かくして、図6の制御によれば、BH解除兆候の検出に応答して、実際にBH制御の解除が実行される前にクリープカット状態から車両の発進可能状態にもたらされることとなり、BH制御の解除時には、制動力が速やかに低減され、車両の発進がスムーズとなる。また、クリープカット中にブレーキペダルを放しても直ちに駆動トルクの再発生が為されるわけではないので、燃費の向上・排ガス抑制の目的が達成されることとなる。
【0049】
ところで、図6の制御処理に於ける駆動トルクの増大は、予め定められた増大勾配にて実行されていたが、かかる増大勾配は、BH解除の兆候の強さ、換言すると、車両が発進される可能性の大きさに依存して決定されてもよい。その一つの例として、図5に関連して例示された如き前方クリアランスソナーにより先行車の相対距離が検出される場合、BH解除兆候の検出後の駆動トルクの目標値は、
(目標駆動トルク値)=(相対距離)/(距離閾値)×(目標クリープトルク) …(2)
により決定されるようになっていてよい。ここで、(目標クリープトルク)は、上記の式(1)で決定される値であり、(距離閾値)とは、車両の発進が為される可能性が非常に高く、目標駆動トルク値が、目標クリープトルクに設定されてよい場合の先行車との相対距離である(典型的には、図5のステップ105に関連して説明された所定距離と同じであってよい。)。
【0050】
上記の式(2)を用いて、目標駆動トルク値を設定する場合、実際の駆動トルクがガタ詰め完了トルク値に到達しているときには、ステップ70に於いてΔTaは、
ΔTa←(今回目標値)−(前回目標値) …(3)
に設定される。(今回目標値)、(前回目標値)は、それぞれ、今回のサイクル及び前回のサイクルの目標駆動トルク値である。従って、式(2)で与えられる量がそのまま駆動トルクに反映されることが試みられる。一方、実際の駆動トルクがガタ詰め完了トルク値に到達していないときには、駆動トルクの増大勾配は、制限される必要があるので、ステップ70に於いてΔTaは、
ΔTa←min(ΔTa0,ΔTa0’)
により与えられてよい。ここで、minは、括弧内の数値のうち、小さい方を選択する演算子であり、ΔTa0’は、式(3)で与えられる量である。即ち、今回のサイクルと前回のサイクルとの間で目標駆動トルク値の差が少なければ、目標駆動トルク値がそのまま反映されるが、差が大きく駆動トルクの増分が(駆動系のガタ詰め前としては)過剰であるときには、その増分が制限され、従って、駆動トルクの増大勾配が制限されることとなる。
【0051】
上記の如き式(2)により目標駆動トルク値を決定する手法によれば、クリープカット終了処理に於ける駆動トルクの増大が、単に予め定められた値で実行されるのではなく、先行車との相対距離の変化の程度によって、即ち、先行車が自車から遠ざかる速さが速ければ速いほど、駆動トルクを目標クリープトルクに近づける速さが増大することとなる。逆にいえば、BH解除兆候が検出されても、先行車の遠ざかる速さが遅ければ、その分駆動トルクの増大は抑制され、燃料が節約できることとなる。
【0052】
以上に於いては本発明を一つの実施の形態について詳細に説明したが、かかる実施の形態について本発明の範囲内にて種々の変更が可能であることは当業者にとって明らかであろう。
【0053】
例えば、上記の実施形態に於いては、BH制御の解除は、アクセルペダルの踏込みにより実行されるようになっているが、ブレーキペダルを所定量以上踏み戻したときに解除されるようになっていてもよい。その場合でも、クリープカットの終了は、BH解除兆候に応答して実行されるので、例えば、車両の停車中にブレーキペダルを所定量以上踏み続けることを前提として、運転者がブレーキペダルを完全に戻したときには、アクセルペダルを踏み込むことなく、即座にクリープトルクにより車両の徐行が開始するなどの態様が達成できることとなる。
【図面の簡単な説明】
【0054】
【図1】図1(A)は、本発明による制動制御装置の好ましい実施形態が搭載される車両の模式図であり、図1(B)は、本発明による制動制御装置の好ましい実施形態を実現する電子制御装置の制御ブロック図である。
【図2】図2は、本発明の制動制御装置により制御される油圧式制動装置の配管構成の模式図である。図中、マスタシリンダカット弁50F、50R、油圧保持弁54iは、常開型のソレノイド弁であり、減圧弁58iは、常閉型のソレノイド弁である。図2は、各弁の設定が制動力の電子制御(BH制御を含む)が行われない状態となっている。
【図3】図3は、車両の停止中にBH制御とクリープカット制御が実行されている状態から車両の発進が実行されるまでの駆動トルク(一点鎖線)と制動トルク(実線)の時間変化の例を示す図である。(A)は、本発明の制駆動制御装置が実行された場合の例であり、(B)は、従前の車両の発進前後のトルク変化の例である。
【図4】図4は、本発明の実施形態に於ける制動制御装置のBH制御の開始及び解除の制御処理をフローチャートの形式で表したものである。
【図5】図5は、本発明の実施形態に於ける車両発進予測検出部の車両発進予測のための制御処理の一つの例をフローチャートの形式で表したものである。図示の例では、前方クリアランスソナー情報を用いて車両発進予測、即ち、BH解除兆候の検出が為される。
【図6】図6は、本発明の実施形態に於ける駆動制御装置のクリープカット終了処理に於ける制御処理をフローチャートの形式で表したものである。
【符号の説明】
【0055】
10…車両
14…アクセルペダル(アクセルペダルセンサを含む)
20…駆動系装置
22…エンジン
26…自動変速機
40…制動系装置
42FL〜42RR…制動装置(ホイールシリンダ)
46…油圧回路
44…ブレーキペダル
52F、R…ポンプ
54i…油圧保持弁
58i…減圧弁
56F、R…リザーバ
70…レーダー装置、ソナー又はビデオカメラ
72…カーナビゲーションシステム
【技術分野】
【0001】
本発明は、自動車等の車両の制動及び発進を制御する車両の制駆動制御装置に係り、より詳細には、車両を制動保持制御(ブレーキホールド制御)による制動力保持状態から発進させる際の制動装置及び駆動装置の作動を制御する装置に係る。
【背景技術】
【0002】
自動車等の車両の運転支援制御の分野に於いて、走行中の車両が制動されて停車した際に、ブレーキペダルの踏込みが緩んでも車輪の制動力を保持する制御(「ブレーキホールド(BH)制御」。「ヒルホールド制御」などと呼ばれることもある。)が提案され、既に実際の車両に搭載されている。BH制御に於いては、例えば、油圧式の電子制御制動(ECB)システムの場合、ブレーキペダルが所定量以上踏込まれると、各輪の制動装置に設けられるホイールシリンダ内の圧力(制動圧)が低減しないように各輪のホイールシリンダからオイルリザーバの流路が遮断され、これにより、ブレーキペダルの踏込みが緩んでも各輪の制動力が保持された状態が維持されることとなる(制動力保持状態は、通常、アクセルペダルの踏込み操作等に応答して、自動的に解除される。)。かかるBH制御によれば、渋滞時や信号待ちなど、車両の停止や発進が繰り返されるとき或いは車両が坂道で停止したときに、車両のクリープ現象又は重力によるずり下がりなど、運転者の意図しない車両の動きを抑制することが可能となる。また、特に、近年、自動車の排ガス低減と燃費の向上の目的で、車両の一時停止時にエンジンの出力の低減若しくは停止制御又は動力伝達装置の無効化(エンジン又はモータから車輪へのトルク伝達経路の遮断)によるクリープカット制御が実行されるところ(以下、エンジン停止の場合も含めて、「クリープカット制御」と称する。)、そのクリープカット制御中に車両を確実に静止させるために、BH制御が併用されるようになっている。
【0003】
上記の如く、車両の一時停止中に、BH制御と、クリープカット制御等の車輪への駆動トルクの伝達の抑制又は阻止を行う制御とを実行する場合、車両を再発進させるときには、BH制御による制動力保持状態の解除と駆動トルクの伝達の開始及び増大とが実行されることとなる。その際の制動力の低減と駆動トルクの増大のタイミングがずれると、車両の飛び出し感が生じたり(相対的に制動力の低減又は解除が早い場合)、或いは、スムーズな発進ができなかったり(相対的に制動力の低減又は解除が遅い場合)することがある。そこで、従来より、制動力保持状態の解除と駆動トルクの増大のタイミングを図るための制御が種々提案されている。例えば、特許文献1では、車両の一時停止時にエンジンを停止する制御に於いて、運転者のブレーキペダルの踏込みの解除に応答してエンジンを再始動して車両を再発進するときに、クリープ力の増大とともに制動力を徐々に低減することが提案されている(この場合、主として、車両の飛び出し感と急な坂道に於けるずりさがりが防止される。)。また、特許文献2では、運転者のブレーキペダルの踏み戻しの際のペダルの戻し速度を参照し、戻し速度が速いときには、クリープトルクの伝達を早めに開始することが提案されている。更に、特許文献3では、アクセルペダルの踏込みに応答してBH制御が解除される構成に於いて、運転者によるブレーキペダルからアクセルペダルの踏み換えに要する時間を予め計測し、アクセルペダルの踏込み開始時には、ブレーキ圧の低減が開始されるようにする制御(ただし、アクセルペダルの踏込みからブレーキ圧の低減開始までの遅れを防止する制御)が開示されている。
【特許文献1】特開2000−313253
【特許文献2】特開2004−52919
【特許文献3】特開2005−22535
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記の従来のBH制御及びクリープカット制御の解除から車両の発進に至る制御では、基本的には、運転者のブレーキペダルの踏込みの解除をきっかけにエンジンの始動又はクリープトルクの発生を行いつつ、BH制御による保持された制動力を適切に低減し、アクセルペダルの踏込み操作を行うと同時に、車両が徐行し始めてくれることを期待するものであるということができる。しかしながら、BH制御は、運転者のブレーキペダルの踏込み負担を軽減することを意図した運転支援制御であり、本来、BH状態の解除と車両の発進は、アクセルペダル踏込みに応答して実行されることが好ましい。また、ブレーキペダルの踏込みの解除をきっかけにエンジンの始動又はクリープトルク発生が実行されても、直ちにアクセルペダルの踏込みが実行されるとは限らず、ブレーキペダルの踏込みの解除と共にエンジンの始動又はクリープトルク発生を実行してしまうと、その分、クリープカット制御の目的である燃費の向上と排ガスの抑制が損なわれることとなる(それを避けたければ、運転者は、車両停車中、ブレーキペダルを踏み続ける必要がある。)。
【0005】
しかしながら、一方、アクセルペダルの踏込みをきっかけに、BH制御とともにクリープカット制御の解除を実行する場合には、エンジンの再始動又は動力伝達装置の有効化(エンジン又はモータから車輪へのトルク伝達経路の接続)に時間を要するので、結局、運転者は、発進がスムーズでない又は遅いとの感覚を覚えることとなろう。また、発進がスムーズではないからといって、BH制御とクリープカット制御の解除の解除後に駆動トルクの増大勾配を直ちに大きくすることは避けるべきである。実際の車両に於いては、エンジンの停止又は動力伝達装置の無効化によって、エンジン又はモータから車輪までのトルクの伝達経路が遮断されると、そのトルクの伝達経路中のギア間の係合状態の緩み(トルクを伝達するギア間の歯のかみ合いが緩む)が生ずる。そのようにギア間の係合状態が緩んだ状態からエンジン又はモータから伝達されるトルクを急激に上げると、ギアの歯の間で衝突が起こり、車両に於いて機械的な衝撃及び騒音が生ずることとなる。従って、クリープカット制御の終了時に、かかる機械的な衝撃及び騒音を避けつつ、車輪への駆動トルクを増大するには、まず、駆動トルクを緩やかに上昇してトルクの伝達経路中のギア間の係合状態の緩みを解消し(所謂、“駆動系のガタ詰め”)、トルクの伝達可能な状態を確立する必要がある。また、かかる“駆動系のガタ詰め”の期間は、車輪の制動力も維持されていることが好ましい。つまり、運転者のアクセルペダルの踏込みに応答してクリープカット制御を解除する場合には、少なくとも“駆動系のガタ詰め”の期間の分だけは遅れてしまう。もちろん、クリープカット制御自体実行しなければ、上記の如き“駆動系のガタ詰め”による機械的衝撃/騒音の問題はなく、車両の発進性は向上されることとなるが、その場合には、燃費を向上するという目的が達成されなくなる。即ち、BH制御とクリープカット制御が実行された状態から車両の発進の実行へ移るきっかけを、運転者のペダル操作等に頼る場合には、BH制御の利点を有効に達成し、クリープカット制御の目的とするところの燃費の向上又は排ガス抑制と車両の発進性の向上を両立することは難しそうである。
【0006】
かくして、本発明の一つの課題は、運転者のペダル操作のみに頼らずに、BH制御とクリープカット制御との実行後に速やかに車両を発進させる制御を実行する車両の制駆動制御装置を提供することである。
【0007】
また、本発明のもう一つの課題は、上記の如き車両の制動及び発進を制御する制駆動制御装置であって、クリープカット制御の実行後に車両を発進させるには、“駆動系のガタ詰め”の期間の分だけの遅れがあることを認識した上で、車両の発進性を改善することのできる装置を提供することである。
【0008】
更に、本発明のもう一つの課題は、車両の制動及び発進を制御する制駆動制御装置であって、燃費の向上又は車両の排ガス抑制と車両の(一時停止後の)発進時の“駆動系のガタ詰め”による機械的衝撃/騒音を抑制しつつ車両の発進性の向上することとを両立することのできる装置を提供することである。
【課題を解決するための手段】
【0009】
本発明によれば、端的に述べれば、車両をBH制御による制動力保持状態から発進させる際の制動装置及び駆動装置の作動を制御する車両の制駆動制御に於いて、BH制御の実行中に車両の発進が予測された場合又はBH制御解除の兆候を検出した場合に車輪への駆動トルクの伝達を開始するよう車両の駆動系を制御する装置が提供される。
【0010】
本発明の車両の制駆動制御装置は、一つの態様に於いて、車両の運転者による制動操作が解除された後に於いても車輪の制動力の保持が可能な制動装置の制動力の保持制御を実行する制動力保持制御手段と、制動力保持制御手段による車輪の制動力の保持制御の実行中に車両の駆動系から車輪へ伝達される駆動トルクを低減するよう駆動トルクを制御する駆動トルク制御手段と、車両の発進が予測されるか否かを検出する発進予測検出手段とを含む。発進予測検出手段が車両の発進の予測を検出すると、そのことに応答して駆動トルク制御手段は、制動力保持制御手段による制動力の保持の解除が実行される時までに、低減されていた駆動トルクを増大することを特徴とする。上記の構成に於いて、車両の運転者による制動操作とは、典型的には、ブレーキペダルの踏込み操作である(ペダルの形式でない制動操作子であってもよいことは理解されるべきである。)。また、本発明の制御装置の適用される車両の制動装置は、所謂BH制御の実行可能な制動装置であり、車両の運転者による制動操作が解除されたとしても、直ちに車輪の制動力を低減するのではなく、制動力保持制御手段により任意の態様にて車輪の制動力の低減が指令されるまで制動力を保持できるよう構成されているものであり、典型的には、電子制御制動装置である。
【0011】
本発明の制御装置の適用される車両の駆動系(即ち、エンジン及び/又はモータから変速機、差動歯車装置等を経て車輪へ至る動力装置)は、上記の如く、制動力保持制御手段による制動力保持制御により制動力の保持が実行される間、駆動トルク制御手段の制御によって、車輪へ伝達される駆動トルクが低減されるよう構成される。かかる制動力の保持制御中の駆動トルクの低減制御は、燃費の向上と排ガス抑制を目的として、制動力の保持制御中の駆動系の発生トルクを通常の停車状態(例えば、アイドリング状態)のときよりも更に低減するものであり(従って、ここでの「駆動トルクの低減」は、車両の加減速制御のための駆動トルクの低減を意図しているのではない。)、自動変速機を備えた車両(AT車)の場合、既に述べた如きクリープカット制御であってよい。即ち、上記の本発明の構成に於いて低減される駆動トルクは、AT車の場合、駆動系のクリープトルクであってよく、また、ハイブリッド車又は電気自動車の場合には、駆動系の電動機により発生されるクリープトルク相当のトルクであってよい。実施の形態に於いて、かかる駆動トルクの低減制御は、車両の駆動系から車輪への駆動トルクの伝達を停止することによって為されてよく、かかる駆動トルクの伝達の停止は、車両の駆動装置(エンジン及び/又はモータ)の作動停止又は車両の駆動系から車輪への駆動トルクの伝達経路の遮断(クラッチ又はギアの解放など)のいずれの手法によってもよい(駆動装置の停止をしなくても、車輪への駆動トルクの伝達経路の遮断により駆動負荷が低減し、燃料消費量の節約になる。)。
【0012】
上記の本発明の構成に於いて特徴とするところは、車両の発進が予測されるか否かを検出する発進予測検出手段、即ち、近い将来の時点で車両の発進が実行されることを予測する手段が設けられ、車両に於いてBH制御の如き制動力保持制御とクリープカット制御の如き駆動トルク低減制御とが実行された状態に於いて、発進予測検出手段により車両の発進予測が検出されると、その時点から駆動トルクの増大が開始されるという点である。即ち、本発明によれば、車両の発進予測が為された段階で、駆動トルク低減制御が解除されて、駆動トルクの増大が実行され、これにより、制動力保持制御が解除されるときには、車両の発進準備が既に完了され、車両がスムーズに発進することが期待される。また、従前の如く、運転者の制動操作の解除ではなく、近い将来に車両が発進するとの情報をきっかけに駆動トルクの低減制御を解除するので、運転者が制動操作を解除しても制動力が保持されるという制動力保持制御の機能は確保されると同時に、運転者の制動操作の解除による時期尚早の駆動トルク低減制御の解除の可能性は低くなるので、燃費の向上・排ガス抑制の目的も達成されることとなる。即ち、本発明の構成によれば、車両の発進性の向上と燃費の向上・排ガス抑制との目的が両立されることとなる。
【0013】
上記の本発明の制御装置に於ける発進予測検出手段による車両の発進予測の検出は、典型的には、車両の周囲環境情報、例えば、先行車の有無や相対距離又は相対速度や道路状況(混雑状況、道路信号表示の切り替わりなど)に関する情報に基づいて為されてよい。従って、その場合には、本発明の制御装置は、車両の周囲環境情報を検出する手段、例えば、車載のソナー又はレーダー装置、カメラ装置、ナビゲーションシステム及びその他の通信システム等の車載設備が取得した情報から任意の車両の周囲環境情報を取得又は検出する手段を含んでいてよい。また、或いは、発進予測検出手段による車両の発進予測の検出は、運転者の状態(運転者の視線等)を監視し、その運転者の状態に基づいて運転者が発進操作を開始することを事前に検知することによって為されてもよい。重要なことは、運転者が車両の発進操作を実行するのに先立って駆動トルクの増大を開始することであり、好ましくは、車両の発進操作の開始時に、車両の発進準備が丁度完了した状態にすることである。従って、好適には、発進予測検出手段は、運転者による車両の駆動操作が実行される前に車両の発進の予測を検出する任意の手段であってよく、発進予測検出手段が車両の発進の予測を検出したときには運転者による車両の駆動操作が実行される前であっても駆動トルク制御手段が駆動トルクの増大を開始するよう構成される。
【0014】
上記の車両の発進予測の検出は、当業者にとって任意の手法により為されてよいことは理解されるべきである。実施の形態に於いては、例えば、前記の周囲環境情報が所定距離内に先行車が存在するか否かの情報を含み、発進予測検出手段が所定距離内に存在していた先行車が存在しなくなった又はかかる先行車との距離が空いたと判定されたときに車両が発進すると予測するようになっていてよい(車両の発進予測又はBH解除兆候の検出)。
【0015】
かくして、上記の本発明の制御装置の一つの態様によれば、車両の発進予測の検出に応答して、駆動トルクの増大が開始されるようになっているので、制動力保持制御の解除は、運転者の制動操作の解除によることなく(制動力保持制御の本来の機能が確保され)、運転者による車両の駆動操作、例えば、アクセルペダルの踏込み又は駆動操作子の操作の実行に応答して解除されるようになっていてよい。
【0016】
上記の本発明の制御装置の駆動トルクの増大処理に関して、その駆動トルクの増大の開始時に於ける該駆動トルクの増加勾配は、好ましくは、所定の勾配以下に制限される。既に述べた如く、駆動トルクを一旦低減し、或いは、駆動トルクの車輪への伝達を停止してしまうと、駆動系のトルク伝達経路の各部のギアのかみ合いに緩み(“駆動系のガタ”)が生ずるので、再度、トルクが伝達可能な状態を確立する際には、初期に於いて緩やかに上昇し、まず、“駆動系のガタ詰め”を行わないと、緩んだギアの歯の衝突などにより機械的な衝撃/騒音が発生し、運転者の発進フィーリングを損ねることとなる。そこで、上記の如く、本発明に於いて、低減されていた駆動トルクを増大するときには、好適には、その増大勾配を制限して、急激なトルク上昇が回避されるよう制御される。この点に関し、既に述べた如く、本発明に於ける駆動トルクの増大は、典型的には、運転者の駆動操作に先立って、車両の発進予測の検出をきっかけに開始されるので、運転者の駆動操作が実行される時点では、“駆動系のガタ詰め”が完了しており、従って、保持されていた制動力も速やかに低減されることが許されるので、従前に比して、車両の発進性が向上されることとなる。
【0017】
上記の駆動系のガタ詰めを実行する際の駆動トルクの増大勾配の許容可能な限界値は、車両の駆動系の構成の仕様によって異なるので、駆動トルクの増大勾配を制限するための所定の勾配値は、実験的に或いは理論的に予め決定されよい。或いは、駆動トルクの増大時に騒音や振動の状態を監視しながら調節されてもよいことは理解されるべきである。かかる駆動トルクの増大の開始後、該駆動トルクが所定トルク値(例えば、駆動系のガタ詰めが完了し、駆動トルクが良好に伝達可能な状態になったと判断される値)に達したときには、駆動トルクの増加勾配が所定の勾配以下に制限されることなく駆動トルクの増大が許されるようになっていてよい。
【0018】
上記の如き駆動トルクの増大は、好適には、制動力保持制御手段による制動力の保持の解除が実行される時には、駆動トルクが駆動系のクリープトルク(AT車の場合)又は駆動系の電動機により発生されるクリープトルク相当のトルクと同等の値(ハイブリッド車又は電気自動車の場合)に達しているように実行される。要すれば、ここでの制動力保持制御手段による制動力の保持の解除が実行される時までに達成されているべきクリープトルクとは、クリープカット制御等の駆動トルク低減が実行されなければ、アクセルペダルの踏み込みがなくても発生するトルクであると考えてよく、駆動系のガタ詰めが完了するトルク値、通常のアイドリング状態に於けるトルク値、又は、路面勾配に応じて車両のずり下がりを防止できるトルク値などに適宜設定されてよい。
【0019】
一方、本発明の制御装置による車両の発進時の制動力の低減は、駆動系のガタ詰めが完了し、或いは、駆動トルク値が、駆動系のクリープトルク又はそれに相当する値に達しているときには、速やかに実行されてよい。従って、本発明の制御装置に於いて、制動力保持制御手段による制動力の保持が解除され、制動力の低減が実行される際、駆動トルクが所定のトルク値(例えば、駆動系のガタ詰めが完了した判定されるトルク値又はクリープトルク値)に達しているときには、駆動トルクが、その所定のトルク値に達していないときに比して、制動力の低減勾配が大きくされるようになっていてよい。或いは、駆動トルクが前記の如き所定のトルク値に達していないときには、車両をスムーズに発進できる状態ではない可能性が高いので、そのときには、制動力保持制御手段による制動力の保持の解除が禁止されるようになっていてもよい(ただし、運転者による車両の駆動要求がある場合には、小さな低減勾配にて制動力が低減されてもよい。
【発明の効果】
【0020】
総じて、本発明による制駆動制御装置は、制動力保持制御と駆動トルク低減制御が実行されている状況から車両の発進に至る過程に於いて、車両の発進の準備のための駆動トルクの増大を、運転者による制動操作又は駆動操作とは別の車両発進予測の情報をきっかけに開始することによって、運転者が駆動操作を開始したときには車両が速やかに発進することを可能にするものであるということができる。かかる過程に於いて、運転者は、自身の制動操作を解除しても制動力が保持されるので、制動力保持制御の本来の運転支援機能が担保されるとともに、制動操作を解除しても直ぐに駆動トルクの増大を実行するわけではないので、燃費の向上・排ガス抑制の目的も達成されることとなる。
【0021】
また、車両の発進予測が運転者による駆動操作の前に適切に検出されれば、駆動系のガタ詰めを適切に実行することが可能となり、機械的な衝撃/騒音の発生といった発進時の運転フィーリングの悪化を回避することが可能となる。そして、制動力保持制御の解除時に、駆動系のガタ詰めが適切に完了され、或いは、クリープトルクの回復が成功している場合には、制動力は速やかに低減され、発進のもたつき感の発生を回避できることとなる。かくして、本発明によれば、最も好適な態様に於いては、制動力保持制御と駆動トルク低減制御から車両の発進に移行する際に、発進フィーリングの悪化の防止、車両の発進性の向上、燃費向上と排ガス抑制の、概ね三つの目的を同時に達成できることとなる。
【0022】
本発明のその他の目的及び利点は、以下の本発明の好ましい実施形態の説明より明らかになるであろう。
【発明を実施するための最良の形態】
【0023】
装置の構成
図1(A)は、本発明の制駆動制御装置の好ましい実施形態が搭載される自動車を模式的に示している。同図に於いて、左右前輪12FL、12FRと、左右後輪12RL、12RRを有する車両10には、通常の態様にて、運転者によるアクセルペダル14の踏込みに応じて各輪(図示の例では、後輪駆動車であるから、後輪のみ)に制駆動力を発生する駆動系装置20と、各輪に制動力を発生する制動系装置40とが搭載される。駆動系装置20は、図示の例では、エンジン22から、トルクコンバータ24、自動変速機26、差動歯車装置28等を介して、出力される駆動トルク或いは回転力が後輪12RL、12RRへ伝達されるよう構成されているが、エンジン22に代えて電動機が用いられる電気式、或いは、エンジンと電動機との双方を有するハイブリッド式の駆動系装置であってもよい。なお、簡単のため図示していないが、車両10には、通常の車両と同様に前輪又は前後輪の舵角を制御するためのステアリング装置が設けられる。
【0024】
制動系装置40は、運転者によりブレーキペダル44の踏込みに応答して作動されるマスタシリンダ45に連通した油圧回路46によって、各輪に装備をされたホイールシリンダ42FL、42FR、42RL、42RR内のブレーキ圧、即ち、各輪に於ける制動力が調節される形式の電子制御式の油圧式制動装置である。図2は、かかる油圧回路46の内部の配管構成の典型例の模式図を示している。同図を参照して、油圧回路46は、左右前輪の対のホイールシリンダ42FL、42FRのブレーキ圧を制御する回路46Fと、左右後輪の対のホイールシリンダ42RL、42RRのブレーキ圧を制御する回路46Rを含み(特に指摘しない限り、2つの回路は、同じ配管構造を有していてよい。)、通常の作動に於いては、ブレーキペダル44の踏込みに応答して、マスタシリンダ45の圧力が、回路46F、Rを介して、それぞれのホイールシリンダ42i(i=FL、FR、RL、RR)へ供給される。一方、ブレーキホールド制御又はその他の電子制御が実行される場合には、電子制御装置60の指令に基づいて、回路46F、Rのマスタシリンダに直接に接続されたマスタシリンダカット弁50F、50Rが閉弁され、油圧回路内に設けられた油圧ポンプ52F、52Rが作動して、マスタシリンダカット弁50F、50Rと各輪のホイールシリンダ42iとの間の油圧を昇圧する。各輪のホイールシリンダ42iには、それぞれ、油圧ポンプ52F、R側に油圧保持弁54i、バッファリザーバ56F、R側には、減圧弁58iが設けられており、各輪のホイールシリンダの油圧を増圧する際には、油圧保持弁54iが開弁されて、ホイールシリンダがポンプからの圧力を受け入れて伸長し、これにより、車輪の内側にて、図示していないブレーキパッド(摩擦要素)がブレーキディスクに押し付けられることにより制動力が発生され、ブレーキ圧を減圧する際には、減圧弁58iが開弁して、リザーバへ圧力を解放する。
【0025】
特に、ブレーキホールド(BH)制御が実行される場合には、上記の説明から理解される如く、減圧弁58iが閉弁され、各輪のホイールシリンダ42iとバッファリザーバ56F、Rとの連通流路が遮断され、これにより、各輪の制動力が保持される。また、BH制御の解除時には、減圧弁58iが各輪のホイールシリンダの油圧、即ち、ブレーキ圧を減圧する際の勾配(低減勾配)は、この分野に於いてよく知られているように、減圧弁54iの開閉周期に於ける閉弁期間に対する開弁期間の比(開弁デューティ比)を調節することにより制御される。即ち、単位時間当たり又は所定の開閉サイクルの1周期に於ける開弁期間が大きいほど、ブレーキ圧の、従って、制動力の低減勾配が大きくなり、制動力の低減速度が高くなる。なお、制動系装置40は、図示の如き油圧式の制動装置でなく、電磁式に各輪に制動力を与える形式又はその他当業者にとって任意の形式のものであってよい。
【0026】
再び、図1(A)を参照して、駆動系装置20及び制動系装置40の作動は、電子制御装置60により制御される。電子制御装置60は、通常の形式の、双方向コモン・バスにより相互に連結されたCPU、ROM、RAM及び入出力ポート装置を有するマイクロコンピュータ及び駆動回路を含んでいてよい。図に於いては、電子制御装置60には、車両の各部に設けられたセンサから、アクセルペダル踏込量θa、ブレーキペダル踏込量θb、車輪速Vwi(i=FL、FR、RL、RR)、各輪のホイールシリンダ内の圧力Pbi(i=FL、FR、RL、RR)等の検出値が入力されるよう例示されているが、本実施形態の車両に於いて実行されるべき各種制御に必要な種々のパラメータ、例えば、エンジン回転数、吸入空気量、変速機回転数を得るための各種検出信号が入力されてよい。また、運転席のフロントパネルには、BH制御の有効/無効を選択するBHスイッチが設けられる。運転者の選択により、BHスイッチがONのとき、その情報が電子制御装置60へ送信され、BH制御により、制動力保持状態が達成される。更に、図1(A)には、図示していないが、電子制御装置60には、Gセンサからの信号が入力され、各種の走行制御に用いられるようになっていてよい(本発明の制駆動制御装置では、後述の如く、クリープトルクの生成時の駆動トルクの目標値の算出に用いられる。)。
【0027】
また更に、本発明の制御装置が適用される車両10には、車両の周辺環境情報を取得する手段として、車両の前方の障害物・先行車両、レーン形状等を認識するための検出器(ビデオカメラ、レーダー装置、前方クリアランスソナー装置等)70と、GPS人工衛星と通信して種々の情報を取得するカーナビゲーションシステム72が設けられている。ビデオカメラ又はレーダー装置等70の検出データは、電子制御装置60内のデータ解析装置へ送信され、任意の公知の手法にて車両前方の障害物の有無とその位置(自車両からの相対距離・相対速度と方向)に関する情報を生成するために用いられる。一方、カーナビゲーションシステムは、自車両の位置(緯度、経度)・車体の向き、走行路の交通量や渋滞の有無等のデータを生成し、それらの情報を電子制御装置60へ送信する。これらの車両の周辺環境情報を取得する手段により取得された情報は、本発明の制御装置に於いては、車両の発進の予測、即ち、停車中の車両が近い将来発進されると予測されるか否かの検出に用いられる。
【0028】
本発明の制駆動制御装置の特徴的な構成及びその作動は、電子制御装置60の内部の構成及びその内部に記憶されたプログラムに従って作動により実現される。図1(B)は、電子制御装置の本発明の制駆動制御に係る構成を機能ブロック図の形式で示したものである。同図を参照して、電子制御装置60に於いては、本発明の制御を実行するために、概して述べれば、制動系装置の作動を制御する制動制御装置60aと、駆動系装置の作動を制御する駆動制御装置60bと、以下に説明される如く、BH制御下、クリープカット制御の実行中に車両の発進の予測、換言すると、BH制御が解除されることとなる兆候(以下、「BH解除兆候」と称する。)を検出するための車両発進予測検出器60cとを含む。
【0029】
制動制御装置60aは、基本的には、ブレーキペダルセンサからのブレーキペダル踏込量θbや車輪速センサ値Vwiに基づいて公知の態様にて油圧回路46を作動して各輪の制動力を制御する(制動力制御部60a−1)。なお、簡単のため図示していないが、各輪の制動力について、対応するブレーキ圧Pbiの実際値に基づいてサーボ制御が実行されてよい。しかしながら、BHスイッチ44aがON状態にされると、BH制御が実行され、ブレーキペダルの踏み戻しが有っても、制動力は低減されず、制動力は保持されるよう制御される(BH制御部60a−2)。これにより、運転者は、ブレーキペダルを踏み続けなくても制動力が維持されることとなるので、運転者の車両の操縦負担が軽減されることとなる。なお、BH制御は、BHスイッチ44aがON状態である他に、任意の条件が成立した場合に実行されるようになっていてもよい。また、BH制御中の制動力の制御、例えば、ブレーキ圧が過剰に大きくならないようにするための制御は、任意に実行されてよい。本実施形態では、BH制御は、アクセルペダルの踏込みがあったときに(例えば、アクセルペダル踏込量θaが所定値以上のとき)、解除され、その後、制動力は後述の態様にて低減される。
【0030】
一方、駆動制御装置60bは、基本的には、アクセルペダルセンサからのアクセルペダル踏込量θaやGセンサ値gに基づいて公知の態様にて駆動系装置20を制御する。しかしながら、BH制御が実行され、任意の所定の条件が成立したとき、例えば、車輪速Vwiの全てが0の状態が所定時間経過したとき及び/又は制動力が所定値以上になったときに、「クリープカット制御」、即ち、車輪トルクへの駆動トルクの伝達を遮断する制御が実行される。かかる駆動トルクの伝達の遮断は、エンジンを停止するか、或いは、自動変速機の変速段をニュートラルに設定するなど、任意の手法により達成されてよい。これにより、車両の停車中の駆動負荷の低減又は駆動トルク発生の中止によって燃料消費量が低減され、燃費の向上、排ガス抑制の目的が達成される。なお、クリープカット制御の実行指令は、制動制御装置から与えるようになっていてもよい。(車輪速センサからの車輪速値、実際の制動力の検出値は、制動制御装置により取得されるため)。
【0031】
上記の如きクリープカット制御の解除又は終了は、本実施形態に於いては、車両発進予測検出部60cからBH解除兆候が駆動制御装置60bへ送信されることに応答して実行される。車両発進予測検出部60cは、前方クリアランスソナー又はレーダー装置70、カーナビゲーションシステム72等の情報に基づいて、典型的には、停止している車両が数秒後に発進されるか否かを判定し、車両が発進されるとの予測が為されたときには、BH解除が為される(アクセルペダルが踏込まれる)兆候ありとして、その情報(BH解除兆候)を駆動制御装置へ送信する。そして、駆動制御装置は、これに応答して、後述の態様にてクリープカット終了制御を実行し、運転者がアクセルペダルを踏込むときまでには、駆動トルクがクリープトルク又はクリープトルク相当のトルク値まで上昇され、速やかに発進される状態にもたらされる。なお、車両発進予測又はBH解除兆候は、当業者にとって任意の手法により為されてよいことは理解されるべきである(一つの検出方法だけでなく、複数の検出方法が同時に用いられ、いずれかの検出方法により、車両発進予測が検出されたときにBH解除兆候ありとしてよい。)。また、車両の外部の状況だけでなく、運転者の顔面等を撮影するビデオカメラ画像を取得し、その画像を任意の手法により画像処理して、運転者がアクセルペダルを踏込むことが数秒後に予測されることを検出し、これにより、BH解除兆候情報を駆動制御装置に送信するようになっていてもよい。
【0032】
駆動制御装置のクリープカット制御の解除処理は、基本的には、運転者がアクセルペダルの踏込みを行う前に完了することが期待される。しかしながら、かかるクリープカット制御解除処理の完了前にアクセルペダルの踏込みが実行される可能性もあり、その場合には、BH制御解除処理に於ける制動力の低減の態様も変更することが好ましい。そこで、駆動制御装置60bから駆動トルクの回復状態に関する情報が制動制御装置60aへ送信されるようになっていることが好ましい。
【0033】
装置の作動
図3は、上記の本発明の制駆動制御装置の構成(及び後述の制御処理過程)により達成されるBH制御とクリープカット制御の解除処理中の制動力(図中、単位は、制動力に車輪半径を乗じたトルクで表示されている。)と駆動トルクの時間変化の例を示している。
【0034】
まず、図3(B)の従来の技術に於けるBH制御とクリープカット制御の解除処理の場合を参照して、従前の場合、BH制御の本来の機能を尊重して、BH制御とクリープカット制御との解除処理がアクセルペダルの踏込みにより同時に開始されるとすると、アクセルペダルの踏込み(BH解除)の時点に於いて、駆動系は、駆動トルクが作用していないので、かみ合いが緩んだ状態、即ち、駆動系に“ガタ”(ギアの歯間の隙間など)が生じている。この場合、かかる“ガタ”が解消されるまで、即ち、“駆動系のガタ詰め”が為される前に、急激に駆動トルクを上昇すると、ギアの歯同士が衝突するなどして、機械的な衝撃や騒音が生ずることとなる。従って、“駆動系のガタ詰め”をする間は、駆動トルクの増大勾配は、図示の如く制限され(駆動系ガタ詰めトルク)、これと同時に、制動トルクも駆動系のガタ詰めが終了するまで、車両の静止状態を保持するために速やかに低減することができない(もし駆動系のガタ詰めの完了前に制動力が消滅すると、車両が不安定となる可能性がある。)。かくして、従前の場合、運転者がアクセルペダルを踏込んでから車両が発進するまでには、少なくとも駆動系のガタ詰めに要する時間の遅れが生ずることとなる。また、実際には、エンジンが停止されていれば、エンジンの再始動等に要する時間の遅れがあるなど、その他の各部の応答遅れが更に追加されることとなる。
【0035】
一方、図3(A)に例示されている如き本発明の制駆動制御装置の場合、クリープカット制御の解除は、前記の如きBH解除兆候があった時点(ta)で開始され、好適には、アクセルペダルの踏込みの時点(t1)の前に、駆動系のガタ詰めの完了(tb)、クリープトルクの回復(tb〜t1)が予め実行されるよう構成される。従って、アクセルペダルの踏込み後(t1〜)、制動力は、速やかに低減することが可能となり、車両は、速やかに発進することが可能となる(t2)。この場合、アクセルペダルの踏込みから車両の発進までの遅れは、保持された制動力が低減されるまで(駆動トルクが制動トルクを超えるまで)の時間となり、従前に比して大幅に短縮されることとなる。
【0036】
なお、「背景技術」の欄に列記された特許文献1〜3は、基本的には、ブレーキペダルの踏込解除に応答して、クリープカット制御の解除処理が実行することを提案している。確かに、これらの場合、アクセルペダルの踏込み時には、車両の発進準備が完了させることが可能であるが、逆に、車両の発進の数秒前まで、BH解除兆候が検出時点まで、運転者がブレーキペダルを踏み続けていないと、駆動トルクが早期に発生し、その分、燃費の向上と排ガス抑制を期待できなくなる。また、ブレーキペダルの踏込みの解除後であって駆動系のガタ詰めの完了前にアクセルペダルを踏んだり、ブレーキペダルの踏込みの解除前にアクセルペダル踏むなどした場合には、結局、図3(A)と同様の状況となる。一方、本発明の場合には、BH制御が作動している間は、ブレーキペダルの踏込みは、運転者の任意で解除されてもよく、また、BH解除兆候は、アクセルペダルの踏込みがあると予測される数秒前を検出するので、その精度が良ければ、アクセルペダルの踏込みの時点に、ブレーキペダルの踏込みがいつ解除されたかによらず、車両の発進準備が完了できることとなる。
【0037】
図4〜6は、それぞれ、上記の本発明のBH制御とクリープカット制御の実行中から車両の発進へ至る過程を実現するための制動制御装置、車両発進予測部、駆動制御装置の制御処理をフローチャートの形式で表したものである。それぞれの制御処理は、車両の運転中、所定の周期にて繰り返し実行される。
【0038】
まず、図4は、制動制御装置に於けるBH制御の実行及び解除の制御処理を表している。かかる制御処理では、まず、BHスイッチがONであるか否か及びその他の任意に設定されてよい条件が成立しているか否かが判定される(ステップ10)。BHスイッチがON或いはその他のBH制御実行の条件が成立しているときには、制動力の保持制御が実行される(ステップ15)。そして、制動力保持状態は、運転者がアクセルペダルの踏込みを実行するまで維持される(ステップ20)。
【0039】
かくして、サイクルが繰り返されるうち(この間に別の制御処理により、クリープカット制御が実行される。)、運転者がアクセルペダルの踏込みを実行すると(アクセルON)、BH制御解除処理が実行される(ステップ30−36、図3の時点t1)。かかるBH制御解除処理では、現在の駆動トルクが参照され(エンジン回転数、吸入空気量等を用いて公知の態様にて推定されるか、又はトルクセンサ等により検出されてよい。)、駆動トルクが所定値、即ち、駆動系のガタ詰めが完了する駆動トルクに達しているか否かが判定される(ステップ30)。本発明の制御によれば、図3に関連する説明に於いて記載されているように、好適には、BH制御が解除される段階で、駆動系のガタ詰めは完了され、クリープトルクが回復していることが期待される。しかしながら、かかる処理が成功裡に完了していない場合に備えて、駆動トルクが所定値に到達しているか否かにより、制動力の低減勾配(1周期に於ける制動力の低減量)が変更される。かくして、駆動トルクが所定値に到達していなければ、駆動系のガタ詰め中であると判断し、今回のサイクルの制動力の低減量ΔTbは、任意に設定される小さな値ΔTb0に設定され(ステップ32)、駆動トルクが所定値に到達していれば、駆動系のガタ詰めが完了していると判断され、制動装置に於いて達成可能な任意に設定される大きな値ΔTb1(>ΔTb0)に設定される(ステップ31)。そして、かかる駆動トルクの回復状態に応じて設定された低減量にて制動力の低減が実行される(ステップ36)。図4の制御によれば、図3(A)に示されている如く、BH制御の実行開始後、アクセルペダルの踏込みがあったときに、BH制御が実行され、その際、駆動トルクが十分に回復していれば、図示の如く制動力は、速やかに低減されることとなる。なお、ΔTb0=0として、ガタ詰め完了までは、制動力の低減が実行されないようにしてもよい。
【0040】
図5は、車両発進予測検出部に於けるBH解除兆候検出の制御処理のうち、特に、前方クリアランスソナー装置による情報を用いて先行車の有無を判定して車両発進予測を検出する制御処理について例示したものである。同図を参照して、かかる制御処理では、まず、駆動トルクが0より大きいか否かが判定される。駆動トルク>0が成立しているときには、クリープカット制御が実行されていないか又は後述のクリープカット制御の終了処理の実行中であるので、形式的に(本来、この時点では、BH解除兆候の有無を判定する必要はない。)車両の発進が予測される、即ち、BH解除兆候ありと判定される(ステップ100、115)。一方、駆動トルクが発生していないときは、ソナー情報に基づき、先行車が所定距離内に存在するか否かが判定される(ステップ105)。かかる所定距離は、その先行車と自車の距離が離れると、運転者が車両の発進をすると予測される予め定められた最大の距離であり、実験的又は理論的に任意に設定されてよい。先行車が前記の所定距離内に存在している場合、先行車との相対距離が増大しているか否かが判定される(ステップ110)。もし今回のサイクルの先行車との相対距離が前回のサイクルの値(図示の制御処理は、繰り返し実行されている。)よりも増大している場合には、距離が空き、運転者が車両の発進をすると予測されるので、BH解除兆候ありと判定され(ステップ115)、相対距離の増大が見られない場合には、BH解除兆候なしと判定される(ステップ125)。なお、相対距離の増大の有無の判定については、相対距離が予め定められた値以上増大したときに、相対距離が増大したと判定されるようになっていてよい。
【0041】
一方、ステップ105で、先行車がなしと判定された場合には、前回のサイクルで先行車があったか否かが判定される。前回のサイクルで所定距離内に先行車があり、今回のサイクルでその先行車がない場合には、車両の前方が空いて、車両が発進されることが予測されるので、その場合には、BH解除兆候ありと判定される(ステップ115)。しかしながら、前回も先行車がないときには、判定が不能なので、BH解除兆候なしと判定される(ステップ125)。この場合、別の手法によるBH解除兆候の検出があるか又はアクセルペダルの踏込みにより、クリープカット制御が解除されることとなる(図6参照)。なお、既に述べた如く、車両の発進予測は、他の任意の手法によりなされてよく、図5の手法に限定されないことは、留意されるべきである。
【0042】
図6は、駆動制御装置に於いて、クリープカット制御が実行され、車輪への駆動トルクの伝達が停止した状態から、再度、駆動トルクの伝達を開始する際の制御処理(クリープカット終了制御)を表している。同図の処理は、実質的には、クリープカット制御中のときに所定の周期で繰り返されるようになっていてよい(ステップ50)。
【0043】
図6の制御処理に於いては、クリープカット制御中に於いて、図5の制御処理によるBH解除兆候ありの判定(ステップ60)か、或いは、運転者によるアクセルペダルの踏込み(“アクセルON”、ステップ62)のいずれかの事象の発生が監視される。図3に関連した説明に於いて記載されているように、本発明の制御では、基本的には、BH解除兆候の検出を待ってクリープカット制御が解除されるが、BH解除兆候の検出が不能であったり、又は、BH解除兆候が検出される前にアクセルペダルの踏込みが為される場合も有り得る。そこで、上記の如く、“アクセルON”状態も監視される。
【0044】
BH解除兆候又はアクセルONのいずれかがあったとき(図3(A)の時点ta)には、図3(A)に於いて例示されている如き態様にて駆動トルクの増大が実行される。かかる処理に於いては、まず、現在の駆動トルクが、後述の態様にて決定される目標クリープトルクに到達しているか否か(ステップ64)、そして、駆動系のガタ詰め完了トルク値に到達しているか否か(ステップ66)が判定される。ここで、目標クリープトルクとは、アクセルペダルの踏込量が実質的に0である状態に、車両の発進前に到達されているべき駆動トルク値である(つまり、クリープカット制御をしないときに、アクセルペダルの踏込みを行わない状態で車輪へ伝達されるクリープトルクの大きさに相当する。)。また、駆動系のガタ詰め完了トルク値は、クリープカット制御により緩んでいた駆動系のギアのガタが解消され、トルクが有効に伝達される状態が確立する駆動トルク値である。
【0045】
なお、ここで、ガタ詰め完了トルク値は、車両の発進時に達成されているべき駆動トルクの最小値であり、目標クリープトルクは、更に、車両の発進時に達成されているべき好適値であるので、目標クリープトルクは、ガタ詰め完了トルク値と同等かそれよりも大きく設定されることは理解されるべきである。ガタ詰め完了トルク値は、車両の駆動系の具体的な構成・仕様により予め実験的に又は理論的には任意に設定されてよい。目標クリープトルクは、ガタ詰め完了トルク値に設定されてもよいが、好ましい一つの例として、路面勾配の関数として、例えば、次の式:
(目標クリープトルク)=(ガタ詰め完了トルク値)+k・g …(1)
(ただし、g<0のとき、g←0に設定)
により決定されてよい。ここで、kは、係数であり、gは、Gセンサ値から与えられる前後方向加速度である。クリープカット中は、車両は静止しているので、g>0のときは、車両は、登坂路上に静止していることとなる。即ち、式(1)によれば、制動力が低減されたとき(t2)の車両のずり落ちを防止するべく、路面の勾配に応じて目標クリープトルクが増大される。
【0046】
現在の駆動トルクがガタ詰め完了トルク値よりも下回っている場合(ta〜tb)には、1サイクル当たりの駆動トルクの増分ΔTaは、機械的な衝撃/騒音を回避する量ΔTa0に設定され、駆動トルクの増大勾配は小さな値に設定される(ステップ68)。なお、クリープカット中は、駆動トルクは車輪へ伝達されていないので、BH解除兆候又はアクセルONが生じた直後から駆動トルクがガタ詰め完了トルク値に到達するまでは、ステップ68により設定された増分にて、駆動トルクの増大が実行される(ステップ72)。しかる後、制御サイクルが繰り返され、駆動トルクがガタ詰め完了トルク値に到達したとき(tb)には、駆動トルクの増大勾配は大きくされてよいので、1サイクル当たりの駆動トルクの増分ΔTaは、ΔTa0よりも大きな(任意に設定される)値ΔTa1に設定される(ステップ70)。
【0047】
更に、制御サイクルが繰り返され、駆動トルクが目標クリープトルクに到達したとき(ステップ64)には、車両の発進準備が完了したこととなり、クリープカット制御が終了したこととなる(ステップ80)。この時点で、駆動トルクの増大は、一旦停止され、それ以降は、通常の運転者によるアクセルの踏込みに応じた駆動トルク制御が実行される。なお、クリープカット終了処理がアクセルONに応答して実行されときには、駆動トルクが目標クリープトルクに到達した時点以降、そのまま通常の運転者によるアクセルの踏込みに応じた駆動トルク制御に移行するようになっていてよい(図3のtb〜t1の間の水平部分がなくなる。)。
【0048】
かくして、図6の制御によれば、BH解除兆候の検出に応答して、実際にBH制御の解除が実行される前にクリープカット状態から車両の発進可能状態にもたらされることとなり、BH制御の解除時には、制動力が速やかに低減され、車両の発進がスムーズとなる。また、クリープカット中にブレーキペダルを放しても直ちに駆動トルクの再発生が為されるわけではないので、燃費の向上・排ガス抑制の目的が達成されることとなる。
【0049】
ところで、図6の制御処理に於ける駆動トルクの増大は、予め定められた増大勾配にて実行されていたが、かかる増大勾配は、BH解除の兆候の強さ、換言すると、車両が発進される可能性の大きさに依存して決定されてもよい。その一つの例として、図5に関連して例示された如き前方クリアランスソナーにより先行車の相対距離が検出される場合、BH解除兆候の検出後の駆動トルクの目標値は、
(目標駆動トルク値)=(相対距離)/(距離閾値)×(目標クリープトルク) …(2)
により決定されるようになっていてよい。ここで、(目標クリープトルク)は、上記の式(1)で決定される値であり、(距離閾値)とは、車両の発進が為される可能性が非常に高く、目標駆動トルク値が、目標クリープトルクに設定されてよい場合の先行車との相対距離である(典型的には、図5のステップ105に関連して説明された所定距離と同じであってよい。)。
【0050】
上記の式(2)を用いて、目標駆動トルク値を設定する場合、実際の駆動トルクがガタ詰め完了トルク値に到達しているときには、ステップ70に於いてΔTaは、
ΔTa←(今回目標値)−(前回目標値) …(3)
に設定される。(今回目標値)、(前回目標値)は、それぞれ、今回のサイクル及び前回のサイクルの目標駆動トルク値である。従って、式(2)で与えられる量がそのまま駆動トルクに反映されることが試みられる。一方、実際の駆動トルクがガタ詰め完了トルク値に到達していないときには、駆動トルクの増大勾配は、制限される必要があるので、ステップ70に於いてΔTaは、
ΔTa←min(ΔTa0,ΔTa0’)
により与えられてよい。ここで、minは、括弧内の数値のうち、小さい方を選択する演算子であり、ΔTa0’は、式(3)で与えられる量である。即ち、今回のサイクルと前回のサイクルとの間で目標駆動トルク値の差が少なければ、目標駆動トルク値がそのまま反映されるが、差が大きく駆動トルクの増分が(駆動系のガタ詰め前としては)過剰であるときには、その増分が制限され、従って、駆動トルクの増大勾配が制限されることとなる。
【0051】
上記の如き式(2)により目標駆動トルク値を決定する手法によれば、クリープカット終了処理に於ける駆動トルクの増大が、単に予め定められた値で実行されるのではなく、先行車との相対距離の変化の程度によって、即ち、先行車が自車から遠ざかる速さが速ければ速いほど、駆動トルクを目標クリープトルクに近づける速さが増大することとなる。逆にいえば、BH解除兆候が検出されても、先行車の遠ざかる速さが遅ければ、その分駆動トルクの増大は抑制され、燃料が節約できることとなる。
【0052】
以上に於いては本発明を一つの実施の形態について詳細に説明したが、かかる実施の形態について本発明の範囲内にて種々の変更が可能であることは当業者にとって明らかであろう。
【0053】
例えば、上記の実施形態に於いては、BH制御の解除は、アクセルペダルの踏込みにより実行されるようになっているが、ブレーキペダルを所定量以上踏み戻したときに解除されるようになっていてもよい。その場合でも、クリープカットの終了は、BH解除兆候に応答して実行されるので、例えば、車両の停車中にブレーキペダルを所定量以上踏み続けることを前提として、運転者がブレーキペダルを完全に戻したときには、アクセルペダルを踏み込むことなく、即座にクリープトルクにより車両の徐行が開始するなどの態様が達成できることとなる。
【図面の簡単な説明】
【0054】
【図1】図1(A)は、本発明による制動制御装置の好ましい実施形態が搭載される車両の模式図であり、図1(B)は、本発明による制動制御装置の好ましい実施形態を実現する電子制御装置の制御ブロック図である。
【図2】図2は、本発明の制動制御装置により制御される油圧式制動装置の配管構成の模式図である。図中、マスタシリンダカット弁50F、50R、油圧保持弁54iは、常開型のソレノイド弁であり、減圧弁58iは、常閉型のソレノイド弁である。図2は、各弁の設定が制動力の電子制御(BH制御を含む)が行われない状態となっている。
【図3】図3は、車両の停止中にBH制御とクリープカット制御が実行されている状態から車両の発進が実行されるまでの駆動トルク(一点鎖線)と制動トルク(実線)の時間変化の例を示す図である。(A)は、本発明の制駆動制御装置が実行された場合の例であり、(B)は、従前の車両の発進前後のトルク変化の例である。
【図4】図4は、本発明の実施形態に於ける制動制御装置のBH制御の開始及び解除の制御処理をフローチャートの形式で表したものである。
【図5】図5は、本発明の実施形態に於ける車両発進予測検出部の車両発進予測のための制御処理の一つの例をフローチャートの形式で表したものである。図示の例では、前方クリアランスソナー情報を用いて車両発進予測、即ち、BH解除兆候の検出が為される。
【図6】図6は、本発明の実施形態に於ける駆動制御装置のクリープカット終了処理に於ける制御処理をフローチャートの形式で表したものである。
【符号の説明】
【0055】
10…車両
14…アクセルペダル(アクセルペダルセンサを含む)
20…駆動系装置
22…エンジン
26…自動変速機
40…制動系装置
42FL〜42RR…制動装置(ホイールシリンダ)
46…油圧回路
44…ブレーキペダル
52F、R…ポンプ
54i…油圧保持弁
58i…減圧弁
56F、R…リザーバ
70…レーダー装置、ソナー又はビデオカメラ
72…カーナビゲーションシステム
【特許請求の範囲】
【請求項1】
車両の制駆動制御装置であって、前記車両の運転者による制動操作が解除された後に於いても車輪の制動力の保持が可能な制動装置の前記制動力の保持制御を実行する制動力保持制御手段と、前記制動力保持制御手段による前記車輪の制動力の保持制御の実行中に前記車両の駆動系から前記車輪へ伝達される駆動トルクを低減するよう前記駆動トルクを制御する駆動トルク制御手段と、前記車両の発進が予測されるか否かを検出する発進予測検出手段とを含み、前記発進予測検出手段が前記車両の発進の予測を検出したことに応答して前記駆動トルク制御手段が前記制動力保持制御手段による前記制動力の保持の解除が実行される時までに前記低減されていたトルクを増大することを特徴とする装置。
【請求項2】
請求項1の装置であって、前記制動力保持制御手段による前記車輪の制動力の保持制御の実行中に低減される前記駆動トルクが前記駆動系のクリープトルク又は前記駆動系の電動機により発生されるクリープトルク相当のトルクであることを特徴とする装置。
【請求項3】
請求項1の装置であって、前記駆動トルク制御手段が、前記制動力保持制御手段による前記車輪の制動力の保持制御の実行中に前記車両の駆動系から前記車輪への駆動トルクの伝達を停止することを特徴とする装置。
【請求項4】
請求項3の装置であって、前記車輪への駆動トルクの伝達の停止が前記車両の駆動装置の作動停止により達成されることを特徴とする装置。
【請求項5】
請求項3の装置であって、前記車輪への駆動トルクの伝達の停止が前記車両の駆動系から前記車輪への駆動トルクの伝達経路を遮断することにより達成されることを特徴とする装置。
【請求項6】
請求項1の装置であって、前記発進予測検出手段が前記運転者による前記車両の駆動操作が実行される前に前記車両の発進の予測を検出することを特徴とする装置。
【請求項7】
請求項6の装置であって、前記発進予測検出手段が前記車両の発進の予測を検出したときには前記運転者による前記車両の駆動操作が実行される前であっても前記駆動トルク制御手段が前記駆動トルクの増大を開始することを特徴とする装置。
【請求項8】
請求項1の装置であって、前記車両の発進の予測が検出されたことに応答して前記駆動トルク制御手段により実行される前記低減されていた駆動トルクの増大の開始時に於ける該駆動トルクの増加勾配が所定の勾配以下に制限されることを特徴とする装置。
【請求項9】
請求項8の装置であって、前記車両の発進の予測が検出されたことに応答して前記駆動トルク制御手段により実行される前記駆動トルクの増大の開始後、該駆動トルクが所定トルク値に達したときには、前記駆動トルクの増加勾配が前記所定の勾配以下に制限されることなく前記駆動トルクの増大が許されることを特徴とする装置。
【請求項10】
請求項1の装置であって、前記制動力保持制御手段による前記制動力の保持の解除が実行される時に前記駆動トルクが前記駆動系のクリープトルク又は前記駆動系の電動機により発生されるクリープトルク相当のトルクと同等の値に達していることを特徴とする装置。
【請求項11】
請求項1の装置であって、前記制動力保持制御手段による前記制動力の保持が解除され、前記制動力の低減が実行される際、前記駆動トルクが所定のトルク値に達しているときには、前記駆動トルクが前記所定のトルク値に達していないときに比して、前記制動力の低減勾配が大きくされることを特徴とする装置。
【請求項12】
請求項1の装置であって、前記駆動トルクが所定のトルク値に達するまで前記制動力保持制御手段による前記制動力の保持の解除が禁止されることを特徴とする装置。
【請求項13】
請求項1の装置であって、前記制動力保持制御手段による前記制動力の保持が前記運転者による前記車両の駆動操作の実行に応答して解除されることを特徴とする装置。
【請求項14】
請求項1の装置であって、前記車両の周囲環境情報を検出する手段を含み、前記発進予測検出手段が前記車両の発進が前記周囲環境情報に基づいて予測されることを特徴とする装置。
【請求項15】
請求項14の装置であって、前記周囲環境情報が所定距離内に先行車が存在するか否かの情報を含み、前記発進予測検出手段が前記所定距離内に存在していた先行車との距離が空いたと判定されたときに前記車両が発進すると予測することを特徴とする装置。
【請求項1】
車両の制駆動制御装置であって、前記車両の運転者による制動操作が解除された後に於いても車輪の制動力の保持が可能な制動装置の前記制動力の保持制御を実行する制動力保持制御手段と、前記制動力保持制御手段による前記車輪の制動力の保持制御の実行中に前記車両の駆動系から前記車輪へ伝達される駆動トルクを低減するよう前記駆動トルクを制御する駆動トルク制御手段と、前記車両の発進が予測されるか否かを検出する発進予測検出手段とを含み、前記発進予測検出手段が前記車両の発進の予測を検出したことに応答して前記駆動トルク制御手段が前記制動力保持制御手段による前記制動力の保持の解除が実行される時までに前記低減されていたトルクを増大することを特徴とする装置。
【請求項2】
請求項1の装置であって、前記制動力保持制御手段による前記車輪の制動力の保持制御の実行中に低減される前記駆動トルクが前記駆動系のクリープトルク又は前記駆動系の電動機により発生されるクリープトルク相当のトルクであることを特徴とする装置。
【請求項3】
請求項1の装置であって、前記駆動トルク制御手段が、前記制動力保持制御手段による前記車輪の制動力の保持制御の実行中に前記車両の駆動系から前記車輪への駆動トルクの伝達を停止することを特徴とする装置。
【請求項4】
請求項3の装置であって、前記車輪への駆動トルクの伝達の停止が前記車両の駆動装置の作動停止により達成されることを特徴とする装置。
【請求項5】
請求項3の装置であって、前記車輪への駆動トルクの伝達の停止が前記車両の駆動系から前記車輪への駆動トルクの伝達経路を遮断することにより達成されることを特徴とする装置。
【請求項6】
請求項1の装置であって、前記発進予測検出手段が前記運転者による前記車両の駆動操作が実行される前に前記車両の発進の予測を検出することを特徴とする装置。
【請求項7】
請求項6の装置であって、前記発進予測検出手段が前記車両の発進の予測を検出したときには前記運転者による前記車両の駆動操作が実行される前であっても前記駆動トルク制御手段が前記駆動トルクの増大を開始することを特徴とする装置。
【請求項8】
請求項1の装置であって、前記車両の発進の予測が検出されたことに応答して前記駆動トルク制御手段により実行される前記低減されていた駆動トルクの増大の開始時に於ける該駆動トルクの増加勾配が所定の勾配以下に制限されることを特徴とする装置。
【請求項9】
請求項8の装置であって、前記車両の発進の予測が検出されたことに応答して前記駆動トルク制御手段により実行される前記駆動トルクの増大の開始後、該駆動トルクが所定トルク値に達したときには、前記駆動トルクの増加勾配が前記所定の勾配以下に制限されることなく前記駆動トルクの増大が許されることを特徴とする装置。
【請求項10】
請求項1の装置であって、前記制動力保持制御手段による前記制動力の保持の解除が実行される時に前記駆動トルクが前記駆動系のクリープトルク又は前記駆動系の電動機により発生されるクリープトルク相当のトルクと同等の値に達していることを特徴とする装置。
【請求項11】
請求項1の装置であって、前記制動力保持制御手段による前記制動力の保持が解除され、前記制動力の低減が実行される際、前記駆動トルクが所定のトルク値に達しているときには、前記駆動トルクが前記所定のトルク値に達していないときに比して、前記制動力の低減勾配が大きくされることを特徴とする装置。
【請求項12】
請求項1の装置であって、前記駆動トルクが所定のトルク値に達するまで前記制動力保持制御手段による前記制動力の保持の解除が禁止されることを特徴とする装置。
【請求項13】
請求項1の装置であって、前記制動力保持制御手段による前記制動力の保持が前記運転者による前記車両の駆動操作の実行に応答して解除されることを特徴とする装置。
【請求項14】
請求項1の装置であって、前記車両の周囲環境情報を検出する手段を含み、前記発進予測検出手段が前記車両の発進が前記周囲環境情報に基づいて予測されることを特徴とする装置。
【請求項15】
請求項14の装置であって、前記周囲環境情報が所定距離内に先行車が存在するか否かの情報を含み、前記発進予測検出手段が前記所定距離内に存在していた先行車との距離が空いたと判定されたときに前記車両が発進すると予測することを特徴とする装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−12655(P2009−12655A)
【公開日】平成21年1月22日(2009.1.22)
【国際特許分類】
【出願番号】特願2007−177836(P2007−177836)
【出願日】平成19年7月5日(2007.7.5)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年1月22日(2009.1.22)
【国際特許分類】
【出願日】平成19年7月5日(2007.7.5)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]