
車両の制動制御装置
【課題】 ホイールシリンダ圧が精度よく監視可能でない制動系に於いて車両の制動中過大なヨーレートを打ち消すのに十分な左右輪の制動力差を短期間で適切に発生できるよう減圧処理及び増圧処理を実行する車両の制動制御装置を提供すること。
【解決手段】 本発明の車両の制動制御装置は、ヨーレートが過大になったとき、ヨーレートの方向と同じ側の車輪のホイールシリンダを低流体圧源へ連通することによる減圧処理及びヨーレートの方向とは反対の側の車輪のホイールシリンダを高流体圧源へ連通することによる増圧処理のうちの少なくとも一方を制御時間に亙って実行し、過大なヨーレートを抑制するヨーモーメントを発生する左右輪制動力差を付与する。その際の制御時間が車両の減速度又はホイールシリンダ圧の推定値に基づいて変更される。
【解決手段】 本発明の車両の制動制御装置は、ヨーレートが過大になったとき、ヨーレートの方向と同じ側の車輪のホイールシリンダを低流体圧源へ連通することによる減圧処理及びヨーレートの方向とは反対の側の車輪のホイールシリンダを高流体圧源へ連通することによる増圧処理のうちの少なくとも一方を制御時間に亙って実行し、過大なヨーレートを抑制するヨーモーメントを発生する左右輪制動力差を付与する。その際の制御時間が車両の減速度又はホイールシリンダ圧の推定値に基づいて変更される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車等の車両の制動制御装置に係り、より詳細には、制動時の車両の安定性向上のために左右後輪の制動力に差を付与して車両のヨーイングモーメントを発生させるよう構成された制動制御装置に係る。
【背景技術】
【0002】
自動車等の車両の制動中にヨーレートが過大になると、車両の左右輪の制動力に差を付与することによって車両にヨーレートとは逆向きのヨーモーメントを発生し、これによりヨーレートの増大を抑制する制動制御が種々提案されている(例えば、特許文献1、2参照。)。典型的には、車両の制動系は流体圧式(油圧式、空気圧式など)であるので、上記の如き制動制御を実行する際には、ブレーキペダルの踏込み量に応じて圧力が増減するマスタシリンダ(若しくは高圧源)と各輪のホイールシリンダとの間を選択的に連通する増圧弁(若しくは保持弁)と、リサーバタンク(若しくは低圧源)と各輪のホイールシリンダとの間を選択的に連通する減圧弁との開閉が制御されて左右輪のうちの少なくとも一方のホイールシリンダ圧の増圧若しくは減圧が為され、これにより、左右輪の制動力差が発生されるのが一般的である。増圧弁及び減圧弁には、典型的には、電磁弁又はソレノイド弁が用いられ、これらの弁は、電子制御装置からの制御指令(ヨーレート等の車両の運動状態によって決定される。)に従って、マスタシリンダから各輪ホイールシリンダへの流体通路、及び、各輪ホイールシリンダからリサーバタンクへの流体通路に於ける流体(油又は空気)自体の流通を許可又は遮断する。かかる電磁弁又はソレノイド弁の開閉動作が弁の前後の圧力差の変化によって影響を受けることから、弁の前後の圧力差に応じて弁体を駆動する電磁力の大きさを補正することも提案されている(特許文献3)。
【0003】
上記の如き制動制御が実行可能な制動系に於いて、各輪ホイールシリンダ内の圧力が精度よく監視可能な場合には、左右輪のホイールシリンダ圧は、車両の運動状態に基づいて決定される目標値に一致するよう制御することが可能である。しかしながら、車両の設計・製造コストの理由から、全ての車両の制動系のホイールシリンダに於いて圧力センサ等のホイールシリンダ圧を検出するための装置が装備されている訳ではない(圧力センサ等が装備されていてもそれらが正常に機能せずに圧力値を精度よく検出できない場合もあり得る。)。そこで、ホイールシリンダ圧を検出するための装置が装備されていないか、ホイールシリンダ圧が精度よく監視可能でない制動系に於いて過大なヨーレートを抑制するための左右輪の制動力差を付与する制御を実行する場合には、車両の制動中にヨーレートが過大になったときに、かかるヨーレートの方向と同じ側の車輪のホイールシリンダでは、増圧弁を遮断した状態で減圧弁を所定の時間に亙って開放してホイールシリンダ圧を減圧し、ヨーレートの方向と反対側の車輪のホイールシリンダでは、減圧弁を遮断した状態で増圧弁を所定の時間に亙って開放してホイールシリンダ圧を増圧し、これにより、過大なヨーレートを打ち消す方向にモーメントを強制的に発生するといった制御が実行される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平5−221300号公報
【特許文献2】特開2006−182173
【特許文献3】特開2001−263531
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の如くホイールシリンダ圧が精度よく監視可能でない制動系で左右輪の制動力差を発生させる際に実行される左右輪のホイールシリンダの減圧処理及び増圧処理に於いて、かかる増減圧が実行される「所定の時間」は、左右輪の制動力差が一度に過大にならない範囲で適当な一定時間に設定される。そして、ヨーレートが抑制し切れない場合には、増減圧の実行が繰り返される。かかる制御構成の場合、増減圧実行中のホイールシリンダ圧の減圧速度及び増圧速度が、そのときの弁の上流及び下流の流体圧、即ち、マスタシリンダ圧及び各輪ホイールシリンダ圧の大きさとそれらの差に依存して変化することとなる(主として、ホイールシリンダ圧の変化特性に起因する。詳細については実施形態の欄を参照。)。従って、一回の「所定の時間」に亙る増減圧処理の実行で変化するホイールシリンダ圧の変化量がそのときのマスタシリンダ圧及び各輪ホイールシリンダ圧の状態によって変動することとなり、過大なヨーレートを打ち消すのに十分なヨーモーメントを発生する左右輪制動力差を短期間で適切に或いは安定的に発生できるとは限らないこととなる。
【0006】
そこで、本発明の一つの課題は、ホイールシリンダ圧が精度よく監視可能でない制動系に於いて過大なヨーレートを打ち消すのに十分な左右輪の制動力差を短期間で適切に発生できるよう構成された制動制御装置を提供することである。
【0007】
また、本発明のもう一つの課題は、上記の如き制動制御装置であって、マスタシリンダ圧及び各輪ホイールシリンダ圧の大きさとそれらの差に依存するホイールシリンダ圧の減圧速度及び増圧速度の変動を考慮して、減圧処理及び増圧処理或いは減圧弁及び増圧弁の開閉を制御するよう構成された制動制御装置を提供することである。
【課題を解決するための手段】
【0008】
本発明によれば、上記の課題を達成するために、各輪のホイールシリンダが高流体圧源又は低流体圧源へ選択的に連通されることにより各輪のホイールシリンダ圧を選択的に増圧又は減圧することが可能であり且つ(各輪のホイールシリンダ圧を検知する手段が備えられていないか或いはそのような手段が正常に機能しない場合の如く)各輪のホイールシリンダ圧の検出値を用いずに各輪のホイールシリンダ圧を増減する車両の流体圧式制動系に於いて、車両の制動中に実際に発生しているヨーレートの大きさが想定されるヨーレートの大きさよりも所定の大きさを越えて増大したとき、即ち、ヨーレートが過大になったときに、実際に発生しているヨーレートの方向と同じ側の車輪のホイールシリンダを低流体圧源へ連通することによって実際に発生しているヨーレートの方向と同じ側の車輪のホイールシリンダ圧を減圧する処理と、実際に発生しているヨーレートの方向とは反対の側の車輪のホイールシリンダを高流体圧源へ連通することによって実際に発生しているヨーレートの方向とは反対の側の車輪のホイールシリンダ圧を増圧する処理とのうちのいずれか一方又は双方を或る制御時間に亙って実行し、これにより車両の左右輪に於いて実際に発生しているヨーレートの大きさを低減する方向にヨーモーメントを発生するための制動力差を付与する車両の制動制御装置であって、前記の増圧処理又は減圧処理を実行する制御時間がかかる増圧処理又は減圧処理の実行開始時の車両の減速度又は各輪のホイールシリンダ圧の推定値に基づいて変更されることを特徴とする制動制御装置が提供される。
【0009】
上記の構成によれば、車両の制動中の過大なヨーレートを抑制するべく左右輪の制動力差を発生させる際に、各輪のホイールシリンダ圧を任意の手法で設定される目標値に一致させるのではなく、或る制御時間に亙って各輪のホイールシリンダを高流体圧源(マスタシリンダなど)又は低流体圧源(リザーバタンクなど)へ選択的に連通することによって増圧又は減圧する形式の制動制御に於いて、各輪のホイールシリンダと高流体圧源又は低流体圧源との連通が為される制御時間が、連通開始時、つまり、増圧処理又は減圧処理の実行開始時の車両の減速度又は各輪のホイールシリンダ圧の推定値に基づいて設定され、これにより、連通時のホイールシリンダ圧の増圧速度又は減圧速度の変動を補償し、従前に比して短期間にて適切に或いは安定的に左右輪の制動力差を発生することが図られる。既に触れたように、従前の上記の如き形式の制動制御に於いて、過大なヨーレートを抑制するための制動力差が安定的に発生されない理由は、ホイールシリンダと高流体圧源又は低流体圧源との連通が為される制御時間が一定に設定される一方で、ホイールシリンダ圧の増圧速度又は減圧速度がそのときの各輪のホイールシリンダ圧、各流体圧源の圧力或いはそれらの差に依存して変動し、これにより一度の増減圧処理に於けるホイールシリンダ圧の変化量がその時々によって異なってしまうためであった。従って、過大なヨーレートを抑制するための制動力差を安定的に発生させるには、増減圧処理の制御時間を増圧速度又は減圧速度に応じて設定し直すことが考えられる。しかしながら、本発明の対象となっている制動系は、増圧速度又は減圧速度の決定因子となるホイールシリンダ圧を時々刻々と直接に検知し或いは監視するための手段がそもそも設けられていないか、そのような手段が装備されていても正常に機能しない場合に、ホイールシリンダ圧の検出値を用いずにかかるホイールシリンダ圧を増減する制動系である。そこで、上記の本発明では、直接検出されるホイールシリンダ圧の代わりに、車両の減速度(減速度を与える車輪上の制動力が車輪のホイールシリンダ圧に対応する。)、或いは、各輪のホイールシリンダ圧の推定値(それまでの各輪のホイールシリンダと高流体圧源又は低流体圧源との連通時間から推定される値などであってよい。)を用いて、ホイールシリンダと高流体圧源又は低流体圧源との連通が為される制御時間を、連通時のホイールシリンダ圧の増圧速度又は減圧速度の変動を補償するよう変更して、速やかに或いは安定的に過大なヨーレートを抑制するための制動力差を発生させることが試みられる。
【0010】
上記の本発明の構成に於ける増圧処理(ホイールシリンダと高流体圧源との連通)を実行する制御時間の設定に関して、後述の実施形態の欄に於いて説明される如く、ホイールシリンダ圧を高流体圧源へ連通したときの増圧速度は、ホイールシリンダ圧が低圧のときには低く、ホイールシリンダ圧が中程度の圧力のときには高く、更にホイールシリンダ圧が高圧のときには再び低くなるという特性を有している。そこで、かかる増圧速度の変動に対応するべく、上記の本発明の装置に於いて、ホイールシリンダ圧が低圧のとき、つまり、増圧処理の実行開始時の車両の減速度又は各輪のホイールシリンダ圧の推定値が第一の所定値よりも小さいときには、増圧処理の実行開始時の車両の減速度又は各輪のホイールシリンダ圧の推定値が小さいほど、増圧処理を実行する制御時間が長く設定されてよく、また、ホイールシリンダ圧が高圧のとき、つまり、増圧処理の実行開始時の車両の減速度又は各輪のホイールシリンダ圧の推定値が第一の所定値よりも大きい第二の所定値を越えているときには、増圧処理の実行開始時の車両の減速度又は各輪のホイールシリンダ圧の推定値が大きいほど、増圧処理を実行する制御時間が長く設定されるようになっていてよい。かかる構成によれば、増圧速度の高いときには、増圧処理の制御時間が短く設定され、増圧速度の低いときには、増圧処理の制御時間が長く設定されることとなり、従って、一度の増圧処理によるホイールシリンダ圧の変化量が、増圧処理開始前のホイールシリンダ圧の絶対的な大きさが異なっていても、より安定化又はより平均化されることとなり、過大なヨーレートを抑制するための車輪に於ける制動力差が安定的に或いは速やかに発生されることが期待される。
【0011】
また、増圧処理実行時のホイールシリンダの増圧速度は、車両の運転者の制動操作量(例えば、ブレーキペダル踏込量)の増減に対応して増減するマスタシリンダ等の高流体圧源の圧力とホイールシリンダ圧との相対的な圧力差が大きければ、これに対応して大きくなるので、増圧処理の制御時間は短くてよいこととなる。従って、上記の本発明の装置は、高流体圧源の圧力が車両の運転者の制動操作量の増減に対応して増減する場合には、増圧処理の実行開始時の高流体圧源の圧力と各輪のホイールシリンダ圧の推定値との差が大きいほど、増圧を実行する制御時間が短く設定されるよう構成されていてよい。
【0012】
一方、本発明の構成に於ける減圧処理(ホイールシリンダと低流体圧源との連通)を実行する制御時間の設定に関して、ホイールシリンダ圧が低いほど、ホイールシリンダ圧を低流体圧源へ連通したときの減圧速度は低くなる。従って、この減圧速度の変化に対応して、減圧処理の制御時間を長く設定することにより、減圧処理によるホイールシリンダ圧の変化量を、減圧速度が変動しても、より安定化又は平均化させることができる。かくして、上記の本発明の装置は、減圧処理の実行開始時の車両の減速度又は各輪のホイールシリンダ圧の推定値が大きいほど、減圧処理を実行する前記制御時間が短く設定されるよう構成されていてよい。
【0013】
更に、既に述べた如く、本発明の対象となる流体圧式制動系に於ける過大なヨーレートを抑制するための制動力差を発生させる制御では、一度の増圧又は減圧処理による制動力差だけでは、ヨーレートが抑制し切れない場合、増圧又は減圧処理が繰り返される。その場合、増圧又は減圧処理の対象となっている車輪のホイールシリンダ圧は、一度目の増圧又は減圧処理開始時よりも高圧又は低圧となっている。即ち、ホイールシリンダの増圧速度又は減圧速度は、増圧又は減圧処理が繰り返される度に低減され、その分、ホイールシリンダ圧の変化量も低減し、一回当たりの制動力差発生処理によるヨーモーメントの効果が低減されることとなる。かかるホイールシリンダ圧の変化量の低減を回避するために、上記の本発明の装置に於いては、減圧処理及び増圧処理のうちの少なくとも一方の制御時間に亙る実行が複数回為される場合には、実行が為される度に制御時間が長く設定されるようになっていてよい。かかる構成によれば、制動力差発生処理が繰り返されても、ヨーモーメント発生の効果が維持され、過大なヨーレートを速やかに抑制できることが期待される。
【0014】
ところで、一般に、自動車等の車両の制動中に於いて、後輪が先にロックすることを回避するために、前後輪制動力配分制御が実行される。かかる前後輪制動力配分制御では、後輪の車輪速が前輪の車輪速に比して所定値を下回ると、マスタシリンダなどの高流体圧源と後輪のホイールシリンダとの連通が遮断され、これにより後輪のホイールシリンダ圧が保持される。この前後輪制動力配分制御が実際に実行されるのは、通常、車両の制動力、つまり、減速度が或る程度高くなったときになったときであるところ、本発明の対象となる過大なヨーレートを抑制するための制動力差を発生する制御も、前後輪制動力配分制御が実行される減速度と同程度の減速度に於いて有意に効果を発揮する。従って、上記の本発明の装置は、車両の制動中に前後輪制動力配分制御が実行されて車両の左右後輪のホイールシリンダ圧が保持された状態に於いて実際に発生しているヨーレートの大きさが所定の大きさを越えて増大したときに、車両の左右後輪に於いて前記の減圧処理及び前記の増圧処理のうちの少なくとも一方の制御時間に亙る実行が為されるようになっていてよい。この場合、減圧処理又は増圧処理の対象となる後輪のホイールシリンダ圧が、減圧処理又は増圧処理の実行開始時に保持された状態となっているので、減圧処理又は増圧処理の実行が容易であることは理解されるべきである。(後輪のホイールシリンダ圧の推定値は、前後輪制動力配分制御実行時の後輪のホイールシリンダ圧又はマスタシリンダ圧が用いられてよい。)
【0015】
また、本発明の対象となる過大なヨーレートを抑制するための制動力差を発生する制御は、車両が制動中に運転者の想定とは異なって発生したヨー運動を抑制するものであり、運転者の操舵とは独立に実行されるものである。従って、運転者のハンドル操作による車両の旋回中に於いては、元々、運転者は車両のヨー運動を意図しているので、過度に運転者の操舵とは独立のヨーモーメントを強制的に発生させる必要はない。そこで、上記の本発明の装置は、車両の直進制動中に実際に発生しているヨーレートの大きさが所定の大きさを越えて増大したとき、前記の減圧処理及び前記の増圧処理のうちの少なくとも一方の制御時間に亙る実行が為されるように構成されていてよい。この場合、制動力差発生のためのホイールシリンダの減圧処理又は増圧処理は、実際に発生しているヨーレートの大きさが所定の大きさを越えて増大したときにのみ実行されるようになっているので、制御処理が簡便となる。
【発明の効果】
【0016】
かくして、上記の本発明の制動制御装置によれば、或る制御時間に亙る各輪のホイールシリンダと高流体圧源又は低流体圧源との連通によるホイールシリンダ圧の増減圧処理によって左右輪の制動力差を発生し、これにより、過大なヨーレートを抑制する制動制御に於いて、ホイールシリンダの増圧速度又は減圧速度の変動を制御時間の長短によって補償し、これにより、一度の増減圧処理に於けるホイールシリンダ圧の変化量を安定化させてヨーレートの抑制のための左右輪の制動力差を発生することが可能となる。また、上記の構成によれば、ホイールシリンダの増圧速度又は減圧速度の変動が補償された態様にて制動力差の発生処理が実行されることから、制動力差の発生処理の回数自体が低減され、短期間にて適切にヨーレートの抑制が為されることが期待される。更に、制御に利用するパラメータは、ヨーレート、車両の減速度、マスタシリンダ圧等から推定されるホイールシリンダ圧の推定値など、多くの一般的な自動車に装備された手段から取得可能な値であり、各輪のホイールシリンダ圧を直接に検出する手段を装備しなくてもよいので、本発明の装置は、制動系のための設計・製造のためのコストを大幅に増大することなく実現可能であることは理解されるべきである。
【0017】
本発明のその他の目的及び利点は、以下の本発明の好ましい実施形態の説明により明らかになるであろう。
【図面の簡単な説明】
【0018】
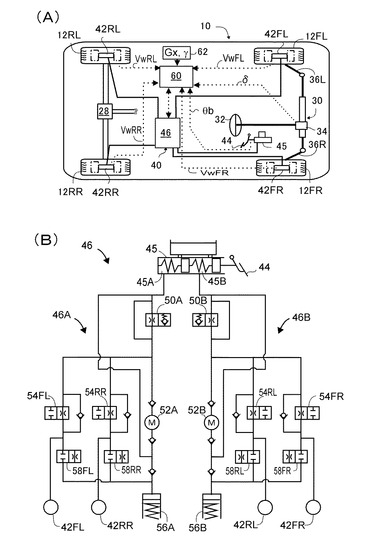
【図1】図1(A)は、本発明の好ましい実施形態である車両の制動制御装置が搭載される車両の模式図である。図1(B)は、本発明の制動制御装置により制御される流体圧式(油圧式、空気圧式など)制動装置の配管構成の模式図である。図中、マスタシリンダカット弁50A、50B、油圧保持弁54iは、常開型のソレノイド弁であり、減圧弁58iは、常閉型のソレノイド弁である。図に於いて、各弁の設定は、前後輪制動力配分制御、左右後輪の制動力差付与が行われていない状態となっている。
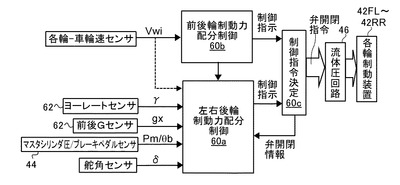
【図2】図2は、本発明による制動制御装置の好ましい実施形態を実現する電子制御装置の制御ブロック図である。
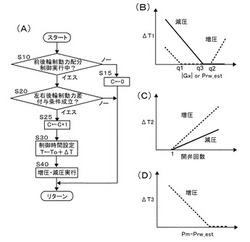
【図3】図3(A)は、本発明の車両の制動制御装置の処理の流れをフローチャートの形式で表したものである。図3(B)、(C)、(D)は、左右後輪の制動力差付与を実行する際の制御時間の補正量を決定するマップを示している。
【図4】図4(A)は、前後輪制動力配分制御が実行された状態での各輪制動力の大きさと向きとを説明する図であり、図4(B)は、前後輪制動力配分制御が実行された状態で更に左右後輪の制動力差付与が行われた状態での各輪制動力の大きさと向きとを説明する図である。図4(C)は、前後輪制動力配分制御と左右後輪の制動力差付与とが実行される場合のマスタシリンダ圧(点線)、後輪ホイールシリンダ圧(一点鎖線:マスタシリンダ圧が比較的低いときに前後輪制動力配分制御が実行された場合。実線:マスタシリンダ圧が比較的高くになってから、前後輪制動力配分制御が実行された場合)の時間変化を模式的に表す図である。
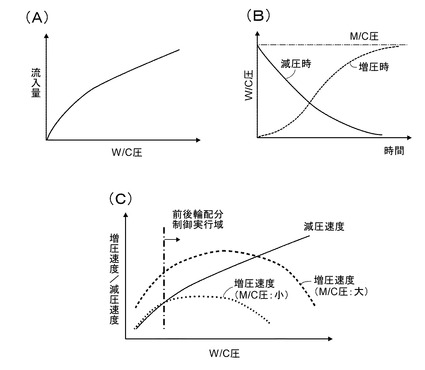
【図5】図5(A)は、ホイールシリンダ圧とホイールシリンダ内に流入した流体の量(体積)との関係を示すグラフ図である。図5(B)は、所与のマスタシリンダ圧(一点鎖線)のときにホイールシリンダの増圧を実行したときのホイールシリンダ圧の時間変化(点線)と、ホイールシリンダの減圧を実行したときのホイールシリンダ圧の時間変化(実線)とを例示したものである。図5(C)は、ホイールシリンダ圧に対するホイールシリンダの増圧速度の変化(点線)とホイールシリンダの減圧速度の変化(実線)とを示すグラフ図である。
【発明を実施するための形態】
【0019】
以下に添付の図を参照しつつ、本発明を幾つかの好ましい実施形態について詳細に説明する。図中、同一の符号は、同一の部位を示す。
【0020】
装置の構成
図1(A)は、本発明の制動制御装置の好ましい実施形態が組み込まれる自動車を模式的に示している。同図に於いて、左右前輪12FL、12FRと、左右後輪12RL、12RRを有する車両10には、通常の態様にて、運転者によるアクセルペダルの踏込みに応じて各輪に制駆動力を発生する駆動系装置(一部のみ図示)と、前輪の舵角を制御するためのステアリング装置30(更に、後輪用の操舵装置が設けられていても良い。)と、各輪に制動力を発生する制動系装置40とが搭載される。駆動系装置は、通常の態様にて、エンジン及び/又は電動機(図示せず)から、変速機(図示せず)、差動歯車装置28等を介して、駆動トルク或いは回転力が後輪12RL、12RRへ伝達されるよう構成されている。また、ステアリング装置は、運転者によって作動されるステアリングホイール32の回転を、倍力装置34により回転力を倍力しながら、タイロッド36L、Rへ伝達し前輪12FL、10FRを転舵するパワーステアリング装置であってよい。
【0021】
制動系装置40は、運転者によりブレーキペダル44の踏込みに応答して作動されるマスタシリンダ45に連通した流体圧回路46によって、各輪に装備されたホイールシリンダ42FL、42FR、42RL、42RR内のホイールシリンダ圧、即ち、各輪に於ける制動力が調節される形式の電子制御式の流体圧式制動装置である。流体圧回路46は、図1(B)に示されている如く、X配管構成であり、左前輪と右後輪の対のホイールシリンダ42FL、42RRのホイールシリンダ圧を制御する回路46Aと、右前輪と左後輪の対のホイールシリンダ42FR、42RLのホイールシリンダ圧を制御する回路46Bを含み(2つの回路は、同じ配管構造を有していてよい。)、それぞれのホイールシリンダ42i(i=FL、FR、RL、RR 以下同様。)には、マスタシリンダ45の弁室45A、Bと各ホイールシリンダとの連通を制御する常開型の増圧弁54iと、リザーバタンク又はバッファリザーバ56A、Bとの連通を制御する常閉型の減圧弁58iとが設けられている。通常の作動に於いては、ブレーキペダル44の踏込みに応答して、マスタシリンダ45の圧力(マスタシリンダ圧)が、回路46A、Bを介して、それぞれのホイールシリンダ42i(i=FL、FR、RL、RR 以下同様。)へ供給される。しかしながら、車両の制動中、後輪が先にロックすることを回避するために前後輪制動力配分制御が実行される場合には、電子制御装置60(図1(A)参照)の指令に基づいて、左右後輪のホイールシリンダ42RL、RRの増圧弁54RL、RRが閉弁され、左右後輪のホイールシリンダ圧が保持される。また、後により詳細に説明される如く、前後輪制動力配分制御の実行中に車両のヨーレートの大きさが過大になったときには、ヨーレートの大きさを抑制する方向のヨーモーメントを発生するために、電子制御装置60の指令に基づいて、一時的に(“制御時間”に亙って)左右後輪のうちの一方の増圧弁54が開弁されて対応するホイールシリンダ圧が増圧され、左右後輪のうちの他方の減圧弁58が開弁されて対応するホイールシリンダ圧が減圧される。更に、図示の例では、上記の構成に加えて、ABS制御などの各輪の制動力を個別に又は独立に調節する目的で更に回路46A、Bとマスタシリンダ弁室45A、Bとの連通を制御する常開型のマスタシリンダカット弁50A、B、マスタシリンダカット弁が閉弁中に回路46A、B内の圧力を昇圧するためのポンプ52A、Bが設けられていてよい(本発明による制御の実行には必須の構成ではない。)。
【0022】
なお、本発明は、ホイールシリンダ圧の検出値を用いない制動制御が対象となっているので、上記の制動系に於いては、直接に検出するセンサは設けられていなくてよい。
【0023】
再び、図1(A)を参照して、制動系装置40の作動を制御する電子制御装置60は、通常の形式の、双方向コモン・バスにより相互に連結されたCPU、ROM、RAM及び入出力ポート装置を有するマイクロコンピュータ及び駆動回路を含んでいてよい。電子制御装置60には、車両の各部に設けられたセンサから、ブレーキペダル踏込量θb、操舵角δ、車輪速Vwi、前後Gセンサ及びヨーレートセンサ62の検出値等の本実施形態の車両に於いて実行されるべき各種制御に必要な種々のパラメータ信号が入力されてよい。
【0024】
本発明の制動制御装置の特徴的な構成及びその作動は、電子制御装置60の内部の構成及びその内部に記憶されたプログラムに従った作動により実現される。図2は、電子制御装置の本発明の制駆動制御に係る構成を機能ブロック図の形式で示したものである。同図を参照して、電子制御装置60には、過大なヨーレートを抑制するための後輪制動力差の発生を指示する左右後輪制動力配分制御部60aと、前後輪制動力配分制御の実行を指示する前後輪制動力配分制御部60bと、制御部60a、60bの制御指示に従って、流体圧回路46内の各弁の開閉作動のための指令を決定し送出するための制御指令決定部60cとを含む。前後輪制動力配分制御部60bは、車両の制動中、車輪速センサから得られる前後輪の車輪速値Vwiを比較して、後輪が先にロックする可能性が生ずると(典型的には、後輪車輪速が前輪車輪速よりも所定値を越えて下回ったとき)、上記に触れたように、後輪の増圧弁54を閉弁して後輪のホイールシリンダ圧を保持し、後輪の制動力の増大を禁止するよう制御指令決定部60cへ制御指示を与える。左右後輪制動力配分制御部60aは、後により詳細に述べる態様により、前後輪制動力配分制御の実行中に、ヨーレートセンサからのヨーレート値γ又は前後輪の車輪速値Vwiに基づいて、ヨーレートが過大であるか否かを判定し、ヨーレートが過大であると判定されたときには、前後Gセンサからの前後加減速度gx、マスタシリンダ圧Pm又はブレーキペダル踏込量θb等の値に基づいて決定される制御時間に亙って左右後輪に於いて制動力差を付与するべく増圧弁又は減圧弁を開弁するよう制御指令決定部60cへ制御指示を与える。なお、左右後輪制動力配分制御部60aによる制御に於いて、左右後輪のホイールシリンダ圧の推定値が利用される場合には、制御指令決定部60cから左右後輪の増圧弁又は減圧弁の開閉状態を表す情報が入力されるようになっていてよい。
【0025】
ヨーレート抑制のための左右後輪制動力配分制御の改良
既に触れたように、本実施形態に於いては、図4(A)に示されている如く、車両の制動中に前後輪制動力配分制御が実行され、後輪制動力が保持されている状態で、車両のヨーレートが過大になったときには、図4(B)に示されている如く、ヨーレートの向きと同じ側(図では右側)の後輪のホイールシリンダを減圧して制動力を低下し、ヨーレートの向きと逆側(図では左側)の後輪のホイールシリンダを増圧して制動力を増大し、これにより左右後輪に制動力差を付与することによって、ヨーレートを抑制するヨーモーメントを車両の重心G周りに発生する左右後輪制動力配分制御が実行される。なお、本実施形態による左右後輪制動力配分制御の作用は、車両の減速度が前後輪制動力配分制御の実行される減速度と同程度まで増大してから有意に効果があるため、本実施形態の装置は、前後輪制動力配分制御が実行されていないときには、左右後輪制動力差の付与を実行しないよう構成される。
【0026】
かかる前後輪制動力配分制御及び左右後輪制動力配分制御が実行されるまでの後輪のホイールシリンダ圧の変化について参照すると、ブレーキペダルの踏込み開始(車両の制動開始)時に於いて、車両の全輪の増圧弁が開放されているので、図4(C)に例示されている如く、後輪のホイールシリンダ圧(W/C圧)は、マスタシリンダ圧(図中、点線)に追従して上昇する。そして、後輪の車輪速が前輪の車輪速よりも所定値を越えて下回ると、後輪が前輪よりも先にロックすることを回避するために前後輪制動力配分制御が作動され、後輪の増圧弁が閉弁され、後輪のホイールシリンダ圧は保持されることとなる。そして、かくして後輪のホイールシリンダ圧が保持された状態で、車両のヨーレートが過大になると、左右後輪制動力配分制御が作動し、左右後輪のうちの一方のホイールシリンダの増圧弁と他方のホイールシリンダの減圧弁とが制御時間に亙って一時的に開弁され、これにより、左右後輪のホイールシリンダ圧差が発生され、左右後輪に於いて制動力差が付与されることとなる。
【0027】
上記の一連の制御作動に於いて、前後輪制動力配分制御の作動の時期は、路面の摩擦状態、減速度に依存するので、後輪ホイールシリンダの増圧弁が閉弁されるときの後輪のホイールシリンダ圧、即ち、後輪の保持圧は、そのときどきで異なることとなる。例えば、図中、一点鎖線にて示されているように比較的低圧にて後輪のホイールシリンダ圧が保持されることもあれば、実線にて示されているように比較的高圧にて後輪のホイールシリンダ圧が保持されることもある。かかる状況に於いて、左右後輪に制動力差を付与するために所定の制御時間に亙ってホイールシリンダの増圧弁及び減圧弁を開弁すると、図4(C)の実線にて示されている場合と一点鎖線にて示されている場合とで発生する左右輪の圧力差が異なっているように、左右後輪間でのホイールシリンダ圧差、即ち、制動力差が、そのときどきで異なることとなり、結局、一度のホイールシリンダの増圧弁及び減圧弁の開弁実行にて発生されるヨーモーメントが不安定となる。
【0028】
上記の左右後輪間でのホイールシリンダ圧差がそのときどきで異なる原因は、ホイールシリンダ圧の増圧速度及び減圧速度が後輪のホイールシリンダ圧、マスタシリンダ圧及びこれらの差に依存して変動するためである。一般にホイールシリンダに於ける圧力とシリンダ内に流入した流体の量との関係は、図5(A)に例示されている如く、ホイールシリンダ圧が低い領域では、シリンダ内部を膨張するために要する容積が大きく、ホイールシリンダ圧が高い領域よりもより多くの流入量を要する。従って、流体の流入出速度が一定の場合、ホイールシリンダ圧が低いときには、増圧速度及び減圧速度は低くなる。一方、ホイールシリンダ圧とマスタシリンダ圧(高流体圧源)又はリザーバ圧(低流体圧源)との関係でみると、マスタシリンダ圧又はリザーバ圧とホイールシリンダ圧との差圧が大きいほど増圧速度及び減圧速度は大きくなる。従って、図5(B)に例示されている如く、或る所与のマスタシリンダ圧に於いてホイールシリンダとマスタシリンダとを連通したときのホイールシリンダ圧の変化は、図中、点線にて示されている如くホイールシリンダ圧が低いときには遅く、ホイールシリンダ圧が中程度のときには早く、ホイールシリンダ圧がマスタシリンダ圧に近づいてくると、再び遅くなる。また、或る所与の圧力にあるホイールシリンダをリザーバに連通したときのホイールシリンダ圧の変化は、図中、実線にて示されている如く、時間と伴に徐々に遅くなる。
【0029】
図5(C)は、上記のホイールシリンダ圧の増圧速度及び減圧速度に於けるホイールシリンダ圧、マスタシリンダ圧の大きさに対する依存性をまとめたグラフ図である。同図を参照して、まず、減圧速度は、リザーバの圧力は一定のため、ホイールシリンダ圧が高いときほど、高くなる。一方、増圧速度は、マスタシリンダ圧が高いときほど、増大すると同時に、ホイールシリンダ圧が低いときと高いとき(マスタシリンダ圧に近づいたとき)に於いて低減するという特性を有することとなる。
【0030】
かくして、本実施形態では、左右後輪制動力配分制御に於いて、一度のホイールシリンダの増圧弁及び減圧弁の開弁実行にて発生されるヨーモーメントの安定化を図るために、上記のホイールシリンダ圧の増圧速度及び減圧速度に於けるホイールシリンダ圧、マスタシリンダ圧の大きさに対する依存性を考慮して、ホイールシリンダ圧の増圧速度及び減圧速度の変化を補償するように増圧弁及び減圧弁を開弁する制御時間が変更される(増圧速度及び減圧速度が低いときには、制御時間を長くする。)。かかる制御時間の変更に関して、既に述べた如く、本実施形態の制動系には、ホイールシリンダ圧を直接に検出する手段が装備されていない。そこで、左右後輪制動力配分制御を実行する左右後輪制動力配分制御部60aに於いては、後輪のホイールシリンダ圧に対応する指標として利用可能な任意のパラメータを用いて制御時間の変更が行われる。
【0031】
後輪のホイールシリンダ圧に対応する指標として、具体的には、車両の減速度、後輪ホイールシリンダ圧の推定値であってよい。車両の減速度は、車輪−路面間に於いて実際に発生している制動力に対応していることから、車両の減速度の変化は、概ね、後輪ホイールシリンダ圧に対応して変化するので、後輪ホイールシリンダ圧の指標として用いることができる。後輪ホイールシリンダ圧の推定値は、任意の手法で求められてよいところ、典型的には、マスタシリンダ圧と増圧弁の開弁時間とから推定されるようになっていてよい。例えば、後輪ホイールシリンダ圧の推定値Prw_estは、ブレーキペダルの踏込み前は、リザーバ圧Poであるとし、また、増圧弁が開弁しているときの微小時間に於けるホイールシリンダ圧の増圧量ΔPuがマスタシリンダ圧Pmとそのときホイールシリンダ圧Prwとの差の関数であり、減圧弁が開弁しているときの微小時間に於けるホイールシリンダ圧の減圧量ΔPdがリザーバ圧Poとそのときホイールシリンダ圧Prwとの差の関数であるとして、微小時間のホイールシリンダ圧の増圧量及び減圧量を逐次加算又は減算することにより、即ち、
Prw_est=Prw_est(前回値)+ΔPu(Pm−Prw_est(前回値))−ΔPd(Prw_est(前回値)−Po) …(A)
により与えられる。ΔPuは、Pm−Prw_est(前回値)の関数であり、ΔPdは、Prw_est(前回値)−Poの関数である。Prw_est(前回値)は、ブレーキペダルの踏込み開始時は、リザーバ圧Poとされる。ΔPuの項は、増圧弁が開弁されているときのみ加算され、ΔPdは、減圧弁が開弁されているときのみ減算される。
【0032】
装置の作動
上記の本実施形態の制動制御装置に於けるヨーレート抑制のための左右後輪制動力配分制御は、左右後輪制動力配分制御部60aが、図3(A)に例示されたフローチャートにて示された制御処理を、車両の走行中、所定のサイクル時間にて繰り返し実行することにより達成される。かかる制御処理に於いて、特に、左右後輪に制動力差を付与するための左右後輪のホイールシリンダ圧の増圧及び減圧処理を実行する制御時間(ホイールシリンダの増圧弁及び減圧弁の開弁時間)は、上記の如くホイールシリンダ圧の増圧速度及び減圧速度の変化を補償するために、車両の減速度又は後輪ホイールシリンダ圧の推定値、増圧及び減圧処理の実行回数及び/又はマスタシリンダ圧と後輪ホイールシリンダ圧の推定値との差に基づいて設定される。
【0033】
図3(A)に例示された制御処理に於いては、具体的には、まず、前後輪制動力配分制御が実行中か否かが判定される(ステップ10)。なお、前後輪制動力配分制御が実行中か否かの情報は、前後輪制動力配分制御部60bから左右後輪制動力配分制御部60aへ与えられる。既に述べた如く、前後輪制動力配分制御が実行されていないときには、左右後輪制動力配分制御は実行されない。(前後輪制動力配分制御が実行されていないときには、左右後輪のホイールシリンダ圧の増圧及び減圧処理の実行回数Cが常に0にリセットされる(ステップ15)。)
【0034】
前後輪制動力配分制御が実行中のときには、次いで、過大なヨーレートを抑制するためのヨーモーメントを発生するために左右後輪に於いて制動力差を付与すべき条件が成立しているか否かが判定される(ステップ20)。かかる制動力差付与条件としては、具体的には、例えば、ヨーレートセンサにて直接に計測されるか又は左右輪の車輪速の差から求められる現在のヨーレート値γと、前輪舵角δと車速(各輪車輪速から任意の手法で決定されてよい。)とに基づいて任意の手法にて演算される想定されるヨーレートγtとの差|γ−γt|について、
|γ−γt|>γo …(1)
が成立していることであってよい(γoは、実験的又は理論的に任意に設定されてよい定数である。)。なお、本実施形態の左右後輪制動力配分制御は、運転者の想定とは異なって発生したヨー運動を抑制すべく運転者の操舵とは独立のヨーモーメントを強制的に発生させるものであるところ、運転者のハンドル操作による車両の旋回中に於いては、元々、運転者は車両のヨー運動を意図しているので、過度に運転者の操舵とは独立のヨーモーメントを強制的に発生させる必要はない。そこで、制動力差付与条件として、車両の直進制動中に、現在のヨーレート値γが過大になったこと、即ち、
舵角|δ|<δoのときに|γ|>γo …(2)
が成立していることであってもよい(δoは、任意に設定される所定角度)。この場合、想定されるヨーレートγtを具体的に演算する必要がないため、演算処理負荷が低減されることとなる。上記の条件(1)又は(2)が成立していないときには、左右後輪制動力差の付与は実行されない。
【0035】
かくして、ステップ20に於いて制動力差付与条件が成立すると、現在の前後輪制動力配分制御が開始された後、即ち、後輪のホイールシリンダ圧が保持された後の左右後輪のホイールシリンダ圧の増圧及び減圧処理の実行回数Cがカウントされ(ステップ25)、制御時間の設定が為される(ステップ30)。
【0036】
ステップ30に於いては、増圧弁を開弁して増圧される側と減圧弁を開弁して減圧される側のそれぞれについて、制御時間Tが
T←To+ΔT …(3)
により設定される。ここで、Toは、制御時間Tの初期設定値であり、典型的には、マスタシリンダ圧が任意の比較的高い値にあるときに、ホイールシリンダ圧が中程度の任意の値に設定されている状態で、ホイールシリンダ圧の増圧及び減圧処理をしたときに、ホイールシリンダ圧に適当な左右差が生ずる時間に設定される(具体的には、実験的又は理論的に任意に設定されてよい定数である。)。ΔTは、ホイールシリンダ圧の増圧速度及び減圧速度の変動を補償するための補正項であり、具体的には、下記の(a)、(b)のいずれかにより設定される。
(a)前後輪制動力配分制御開始後、初めて後輪ホイールシリンダ圧の増圧及び減圧処理を実行するとき(C=1のとき):
増圧側 ΔT=ΔT1+ΔT3 …(4a)
減圧側 ΔT=ΔT1 …(4b)
(b)既に後輪ホイールシリンダ圧の増圧及び減圧処理が実行されているとき(C>1のとき):
増圧側 ΔT=ΔT2+ΔT3 …(5a)
減圧側 ΔT=ΔT2 …(5b)
【0037】
上記に於いて、式(4a)、(4b)のΔT1は、車両の減速度(加減速度の絶対値)|Gx|又は後輪ホイールシリンダ圧の推定値Prw_estをパラメータとして、図3(B)のマップから与えられる。従って、増圧側では、図中、点線にて示されている如く、図4(C)のホイールシリンダ圧に対する増圧速度の変化に対応して、|Gx|又はPrw_estが第一の所定値q1より低いとき(前後輪制動力配分制御が比較的低い減速度に於いて又は制動力が高くなっていないときに開始されたとき)と|Gx|又はPrw_estが第二の所定値q2より高いとき(前後輪制動力配分制御が比較的高い減速度に於いて又は制動力が比較的高くなったときに開始されたとき)には、増圧速度が低いので、制御時間Tは、Toよりも延長されることとなる。また、図4(C)のホイールシリンダ圧に対する減圧速度の変化に対応して、減圧側では、|Gx|又はPrw_estが低いほど(所定値q3より低いとき)、減圧速度が低いので、制御時間Tは、長く設定されることとなる。なお、図3(B)のマップに於いて後輪ホイールシリンダ圧の推定値Prw_estがパラメータとして利用される場合、後輪ホイールシリンダ圧の推定値Prw_estは、マスタシリンダ圧Pmと弁の開閉情報とを用いて、上記の式(A)により算出されてよい。また、マスタシリンダ圧Pmは、ブレーキペダルの踏込量θbに対応するので、直接計測されたものではなく、ブレーキペダルの踏込量θbに基づいて決定された値であってもよい。
【0038】
式(5a)、(5b)のΔT2は、前後輪制動力配分制御開始後の後輪ホイールシリンダ圧の増圧及び減圧処理の実行回数Cをパラメータとして、図3(C)のマップから与えられる。既に触れたように、本実施形態の制御では、後輪ホイールシリンダ圧の増圧及び減圧処理を実行してヨーモーメントを付与した後に、ヨーレートが抑制されないとき、つまり、条件(1)又は(2)が成立するときには、後輪ホイールシリンダ圧の増圧及び減圧処理が繰り返し実行される。その場合、既に、後輪ホイールシリンダ圧の増圧及び減圧処理が実行されている場合には、かかる処理を実行する前よりも、増圧側の後輪ホイールシリンダ圧は、マスタシリンダ圧に近づき、減圧側の後輪ホイールシリンダ圧は、リザーバ圧に近づいていることになり、増圧速度又は減圧速度は低減していることとなる。従って、図3(C)に示されている如く、後輪ホイールシリンダ圧の増圧及び減圧処理が繰り返される度に、増圧速度又は減圧速度の低減を補償すべく、制御時間が延長される。
【0039】
式(4a)、(5a)のΔT3は、マスタシリンダ圧Pmと後輪ホイールシリンダ圧の推定値Prw_estとの差Pm−Prw_estをパラメータとして、図3(D)のマップから与えられる。図4に関連した説明から理解されるように、増圧側の後輪ホイールシリンダ圧の増圧速度は、マスタシリンダ圧と後輪ホイールシリンダ圧との差が小さいほど遅くなる。そこで、かかる増圧速度の変化を補償すべく、制御時間は、圧力差Pm−Prw_estが低いほど延長される。後輪ホイールシリンダ圧の推定値Prw_estは、マスタシリンダ圧Pmと弁の開閉情報とを用いて、上記の式(A)により算出されたものでよく、マスタシリンダ圧Pmは、ブレーキペダルの踏込量θbに基づいて決定された値であってもよい。
【0040】
そして、上記の如く制御時間が設定されると、現在のヨーレートの向きと同じ側の後輪のホイールシリンダについては、上記の制御時間に亙って減圧弁が開弁され、現在のヨーレートの向きと逆側の後輪のホイールシリンダについては、上記の制御時間に亙って増圧弁が開弁されるよう制御指令決定部に制御指示が送られ、増圧・減圧が実行される(ステップ40)。
【0041】
かくして、上記の構成によれば、車両の制動中に過大なヨーレートを抑制するために左右後輪に制動力差を付与する後輪ホイールシリンダ圧の増圧及び減圧処理を実行する際に、増圧速度及び減圧速度が低い状況に於いては、増圧弁と減圧弁を開弁する制御時間が延長され、これにより、一度の増圧及び減圧処理でより大きな制動力差又はヨーモーメントを安定的に発生することが可能となる。そして、一度の増圧及び減圧処理で発生するヨーモーメントが大きくなることから、過大なヨーレートをより迅速に抑制することが可能となる。
【0042】
また、上記の構成に於いて、本実施形態の制御は、ホイールシリンダ圧を直接に検出するためのセンサ等の装備を必要とせず、通常の自動車に於いて装備されているセンサ、車輪速センサ、マスタシリンダ圧センサ又はブレーキペダルセンサ、前後Gセンサ、或いは、ヨーレートセンサ(車輪速からヨーレートを算出する場合には必須ではない。)等からの検出値を用いて達成されるので、制御に必要な装備のコストを殆ど増大しなくてよいことは、理解されるべきである。
【0043】
以上の説明は、本発明の実施の形態に関連してなされているが、当業者にとつて多くの修正及び変更が容易に可能であり、本発明は、上記に例示された実施形態のみに限定されるものではなく、本発明の概念から逸脱することなく種々の装置に適用されることは明らかであろう。
【0044】
例えば、過大なヨーレートを抑制するための左右制動力差は前輪又は全輪に付与されるようになっていてもよい。また、かかる左右制動力差は、ヨーレートの向きと同じ側の車輪のホイールシリンダ圧の減圧処理とヨーレートの向きと逆側の車輪のホイールシリンダ圧の増圧処理とのうちのいずれか一方のみ実行することにより生成されてもよく、その場合にも上記の如き、増圧速度又は減圧速度の変化を補償する制御時間の変更が実行されるようになっていてよい。更に、上記の過大なヨーレートを抑制するための左右制動力差の付与は、前後輪制動力配分制御の実行の有無にかかわらず実行されてもよい。
【0045】
更にまた、増圧速度又は減圧速度の変化を補償する制御時間の変更の態様又は補正量ΔTの設定は、ホイールシリンダ圧の増圧速度又は減圧速度の変化特性に応じて決定されるべきであり、図3(B)〜(D)に例示のマップに限定されない。また、ホイールシリンダ圧の増圧は、マスタシリンダカット弁が閉鎖しているときには、ポンプにより昇圧によって為されてよい(その場合、高流体圧源は、ポンプとなる。)
【0046】
また、例示の実施形態では、本発明は、ホイールシリンダ圧を検知する手段が設けられていない制動系に適用されているが、ホイールシリンダ圧を検知する手段が設けられていてもかかる手段が正常に機能せず、ホイールシリンダ圧の検出値が精度よく得られない場合に適用されてもよいことが理解されるべきである。
【符号の説明】
【0047】
10…車両
12FL,FR,RL,RR…車輪
30…ステアリング装置
40…制動系装置
44…ブレーキペダル
42FL,FR,RL,RR…ホイールシリンダ
45…マスタシリンダ
46…流体圧回路
54FL,FR,RL,RR…増圧弁
56A、B…リザーバ
58FL,FR,RL,RR…減圧弁
60…電子制御装置
【技術分野】
【0001】
本発明は、自動車等の車両の制動制御装置に係り、より詳細には、制動時の車両の安定性向上のために左右後輪の制動力に差を付与して車両のヨーイングモーメントを発生させるよう構成された制動制御装置に係る。
【背景技術】
【0002】
自動車等の車両の制動中にヨーレートが過大になると、車両の左右輪の制動力に差を付与することによって車両にヨーレートとは逆向きのヨーモーメントを発生し、これによりヨーレートの増大を抑制する制動制御が種々提案されている(例えば、特許文献1、2参照。)。典型的には、車両の制動系は流体圧式(油圧式、空気圧式など)であるので、上記の如き制動制御を実行する際には、ブレーキペダルの踏込み量に応じて圧力が増減するマスタシリンダ(若しくは高圧源)と各輪のホイールシリンダとの間を選択的に連通する増圧弁(若しくは保持弁)と、リサーバタンク(若しくは低圧源)と各輪のホイールシリンダとの間を選択的に連通する減圧弁との開閉が制御されて左右輪のうちの少なくとも一方のホイールシリンダ圧の増圧若しくは減圧が為され、これにより、左右輪の制動力差が発生されるのが一般的である。増圧弁及び減圧弁には、典型的には、電磁弁又はソレノイド弁が用いられ、これらの弁は、電子制御装置からの制御指令(ヨーレート等の車両の運動状態によって決定される。)に従って、マスタシリンダから各輪ホイールシリンダへの流体通路、及び、各輪ホイールシリンダからリサーバタンクへの流体通路に於ける流体(油又は空気)自体の流通を許可又は遮断する。かかる電磁弁又はソレノイド弁の開閉動作が弁の前後の圧力差の変化によって影響を受けることから、弁の前後の圧力差に応じて弁体を駆動する電磁力の大きさを補正することも提案されている(特許文献3)。
【0003】
上記の如き制動制御が実行可能な制動系に於いて、各輪ホイールシリンダ内の圧力が精度よく監視可能な場合には、左右輪のホイールシリンダ圧は、車両の運動状態に基づいて決定される目標値に一致するよう制御することが可能である。しかしながら、車両の設計・製造コストの理由から、全ての車両の制動系のホイールシリンダに於いて圧力センサ等のホイールシリンダ圧を検出するための装置が装備されている訳ではない(圧力センサ等が装備されていてもそれらが正常に機能せずに圧力値を精度よく検出できない場合もあり得る。)。そこで、ホイールシリンダ圧を検出するための装置が装備されていないか、ホイールシリンダ圧が精度よく監視可能でない制動系に於いて過大なヨーレートを抑制するための左右輪の制動力差を付与する制御を実行する場合には、車両の制動中にヨーレートが過大になったときに、かかるヨーレートの方向と同じ側の車輪のホイールシリンダでは、増圧弁を遮断した状態で減圧弁を所定の時間に亙って開放してホイールシリンダ圧を減圧し、ヨーレートの方向と反対側の車輪のホイールシリンダでは、減圧弁を遮断した状態で増圧弁を所定の時間に亙って開放してホイールシリンダ圧を増圧し、これにより、過大なヨーレートを打ち消す方向にモーメントを強制的に発生するといった制御が実行される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平5−221300号公報
【特許文献2】特開2006−182173
【特許文献3】特開2001−263531
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の如くホイールシリンダ圧が精度よく監視可能でない制動系で左右輪の制動力差を発生させる際に実行される左右輪のホイールシリンダの減圧処理及び増圧処理に於いて、かかる増減圧が実行される「所定の時間」は、左右輪の制動力差が一度に過大にならない範囲で適当な一定時間に設定される。そして、ヨーレートが抑制し切れない場合には、増減圧の実行が繰り返される。かかる制御構成の場合、増減圧実行中のホイールシリンダ圧の減圧速度及び増圧速度が、そのときの弁の上流及び下流の流体圧、即ち、マスタシリンダ圧及び各輪ホイールシリンダ圧の大きさとそれらの差に依存して変化することとなる(主として、ホイールシリンダ圧の変化特性に起因する。詳細については実施形態の欄を参照。)。従って、一回の「所定の時間」に亙る増減圧処理の実行で変化するホイールシリンダ圧の変化量がそのときのマスタシリンダ圧及び各輪ホイールシリンダ圧の状態によって変動することとなり、過大なヨーレートを打ち消すのに十分なヨーモーメントを発生する左右輪制動力差を短期間で適切に或いは安定的に発生できるとは限らないこととなる。
【0006】
そこで、本発明の一つの課題は、ホイールシリンダ圧が精度よく監視可能でない制動系に於いて過大なヨーレートを打ち消すのに十分な左右輪の制動力差を短期間で適切に発生できるよう構成された制動制御装置を提供することである。
【0007】
また、本発明のもう一つの課題は、上記の如き制動制御装置であって、マスタシリンダ圧及び各輪ホイールシリンダ圧の大きさとそれらの差に依存するホイールシリンダ圧の減圧速度及び増圧速度の変動を考慮して、減圧処理及び増圧処理或いは減圧弁及び増圧弁の開閉を制御するよう構成された制動制御装置を提供することである。
【課題を解決するための手段】
【0008】
本発明によれば、上記の課題を達成するために、各輪のホイールシリンダが高流体圧源又は低流体圧源へ選択的に連通されることにより各輪のホイールシリンダ圧を選択的に増圧又は減圧することが可能であり且つ(各輪のホイールシリンダ圧を検知する手段が備えられていないか或いはそのような手段が正常に機能しない場合の如く)各輪のホイールシリンダ圧の検出値を用いずに各輪のホイールシリンダ圧を増減する車両の流体圧式制動系に於いて、車両の制動中に実際に発生しているヨーレートの大きさが想定されるヨーレートの大きさよりも所定の大きさを越えて増大したとき、即ち、ヨーレートが過大になったときに、実際に発生しているヨーレートの方向と同じ側の車輪のホイールシリンダを低流体圧源へ連通することによって実際に発生しているヨーレートの方向と同じ側の車輪のホイールシリンダ圧を減圧する処理と、実際に発生しているヨーレートの方向とは反対の側の車輪のホイールシリンダを高流体圧源へ連通することによって実際に発生しているヨーレートの方向とは反対の側の車輪のホイールシリンダ圧を増圧する処理とのうちのいずれか一方又は双方を或る制御時間に亙って実行し、これにより車両の左右輪に於いて実際に発生しているヨーレートの大きさを低減する方向にヨーモーメントを発生するための制動力差を付与する車両の制動制御装置であって、前記の増圧処理又は減圧処理を実行する制御時間がかかる増圧処理又は減圧処理の実行開始時の車両の減速度又は各輪のホイールシリンダ圧の推定値に基づいて変更されることを特徴とする制動制御装置が提供される。
【0009】
上記の構成によれば、車両の制動中の過大なヨーレートを抑制するべく左右輪の制動力差を発生させる際に、各輪のホイールシリンダ圧を任意の手法で設定される目標値に一致させるのではなく、或る制御時間に亙って各輪のホイールシリンダを高流体圧源(マスタシリンダなど)又は低流体圧源(リザーバタンクなど)へ選択的に連通することによって増圧又は減圧する形式の制動制御に於いて、各輪のホイールシリンダと高流体圧源又は低流体圧源との連通が為される制御時間が、連通開始時、つまり、増圧処理又は減圧処理の実行開始時の車両の減速度又は各輪のホイールシリンダ圧の推定値に基づいて設定され、これにより、連通時のホイールシリンダ圧の増圧速度又は減圧速度の変動を補償し、従前に比して短期間にて適切に或いは安定的に左右輪の制動力差を発生することが図られる。既に触れたように、従前の上記の如き形式の制動制御に於いて、過大なヨーレートを抑制するための制動力差が安定的に発生されない理由は、ホイールシリンダと高流体圧源又は低流体圧源との連通が為される制御時間が一定に設定される一方で、ホイールシリンダ圧の増圧速度又は減圧速度がそのときの各輪のホイールシリンダ圧、各流体圧源の圧力或いはそれらの差に依存して変動し、これにより一度の増減圧処理に於けるホイールシリンダ圧の変化量がその時々によって異なってしまうためであった。従って、過大なヨーレートを抑制するための制動力差を安定的に発生させるには、増減圧処理の制御時間を増圧速度又は減圧速度に応じて設定し直すことが考えられる。しかしながら、本発明の対象となっている制動系は、増圧速度又は減圧速度の決定因子となるホイールシリンダ圧を時々刻々と直接に検知し或いは監視するための手段がそもそも設けられていないか、そのような手段が装備されていても正常に機能しない場合に、ホイールシリンダ圧の検出値を用いずにかかるホイールシリンダ圧を増減する制動系である。そこで、上記の本発明では、直接検出されるホイールシリンダ圧の代わりに、車両の減速度(減速度を与える車輪上の制動力が車輪のホイールシリンダ圧に対応する。)、或いは、各輪のホイールシリンダ圧の推定値(それまでの各輪のホイールシリンダと高流体圧源又は低流体圧源との連通時間から推定される値などであってよい。)を用いて、ホイールシリンダと高流体圧源又は低流体圧源との連通が為される制御時間を、連通時のホイールシリンダ圧の増圧速度又は減圧速度の変動を補償するよう変更して、速やかに或いは安定的に過大なヨーレートを抑制するための制動力差を発生させることが試みられる。
【0010】
上記の本発明の構成に於ける増圧処理(ホイールシリンダと高流体圧源との連通)を実行する制御時間の設定に関して、後述の実施形態の欄に於いて説明される如く、ホイールシリンダ圧を高流体圧源へ連通したときの増圧速度は、ホイールシリンダ圧が低圧のときには低く、ホイールシリンダ圧が中程度の圧力のときには高く、更にホイールシリンダ圧が高圧のときには再び低くなるという特性を有している。そこで、かかる増圧速度の変動に対応するべく、上記の本発明の装置に於いて、ホイールシリンダ圧が低圧のとき、つまり、増圧処理の実行開始時の車両の減速度又は各輪のホイールシリンダ圧の推定値が第一の所定値よりも小さいときには、増圧処理の実行開始時の車両の減速度又は各輪のホイールシリンダ圧の推定値が小さいほど、増圧処理を実行する制御時間が長く設定されてよく、また、ホイールシリンダ圧が高圧のとき、つまり、増圧処理の実行開始時の車両の減速度又は各輪のホイールシリンダ圧の推定値が第一の所定値よりも大きい第二の所定値を越えているときには、増圧処理の実行開始時の車両の減速度又は各輪のホイールシリンダ圧の推定値が大きいほど、増圧処理を実行する制御時間が長く設定されるようになっていてよい。かかる構成によれば、増圧速度の高いときには、増圧処理の制御時間が短く設定され、増圧速度の低いときには、増圧処理の制御時間が長く設定されることとなり、従って、一度の増圧処理によるホイールシリンダ圧の変化量が、増圧処理開始前のホイールシリンダ圧の絶対的な大きさが異なっていても、より安定化又はより平均化されることとなり、過大なヨーレートを抑制するための車輪に於ける制動力差が安定的に或いは速やかに発生されることが期待される。
【0011】
また、増圧処理実行時のホイールシリンダの増圧速度は、車両の運転者の制動操作量(例えば、ブレーキペダル踏込量)の増減に対応して増減するマスタシリンダ等の高流体圧源の圧力とホイールシリンダ圧との相対的な圧力差が大きければ、これに対応して大きくなるので、増圧処理の制御時間は短くてよいこととなる。従って、上記の本発明の装置は、高流体圧源の圧力が車両の運転者の制動操作量の増減に対応して増減する場合には、増圧処理の実行開始時の高流体圧源の圧力と各輪のホイールシリンダ圧の推定値との差が大きいほど、増圧を実行する制御時間が短く設定されるよう構成されていてよい。
【0012】
一方、本発明の構成に於ける減圧処理(ホイールシリンダと低流体圧源との連通)を実行する制御時間の設定に関して、ホイールシリンダ圧が低いほど、ホイールシリンダ圧を低流体圧源へ連通したときの減圧速度は低くなる。従って、この減圧速度の変化に対応して、減圧処理の制御時間を長く設定することにより、減圧処理によるホイールシリンダ圧の変化量を、減圧速度が変動しても、より安定化又は平均化させることができる。かくして、上記の本発明の装置は、減圧処理の実行開始時の車両の減速度又は各輪のホイールシリンダ圧の推定値が大きいほど、減圧処理を実行する前記制御時間が短く設定されるよう構成されていてよい。
【0013】
更に、既に述べた如く、本発明の対象となる流体圧式制動系に於ける過大なヨーレートを抑制するための制動力差を発生させる制御では、一度の増圧又は減圧処理による制動力差だけでは、ヨーレートが抑制し切れない場合、増圧又は減圧処理が繰り返される。その場合、増圧又は減圧処理の対象となっている車輪のホイールシリンダ圧は、一度目の増圧又は減圧処理開始時よりも高圧又は低圧となっている。即ち、ホイールシリンダの増圧速度又は減圧速度は、増圧又は減圧処理が繰り返される度に低減され、その分、ホイールシリンダ圧の変化量も低減し、一回当たりの制動力差発生処理によるヨーモーメントの効果が低減されることとなる。かかるホイールシリンダ圧の変化量の低減を回避するために、上記の本発明の装置に於いては、減圧処理及び増圧処理のうちの少なくとも一方の制御時間に亙る実行が複数回為される場合には、実行が為される度に制御時間が長く設定されるようになっていてよい。かかる構成によれば、制動力差発生処理が繰り返されても、ヨーモーメント発生の効果が維持され、過大なヨーレートを速やかに抑制できることが期待される。
【0014】
ところで、一般に、自動車等の車両の制動中に於いて、後輪が先にロックすることを回避するために、前後輪制動力配分制御が実行される。かかる前後輪制動力配分制御では、後輪の車輪速が前輪の車輪速に比して所定値を下回ると、マスタシリンダなどの高流体圧源と後輪のホイールシリンダとの連通が遮断され、これにより後輪のホイールシリンダ圧が保持される。この前後輪制動力配分制御が実際に実行されるのは、通常、車両の制動力、つまり、減速度が或る程度高くなったときになったときであるところ、本発明の対象となる過大なヨーレートを抑制するための制動力差を発生する制御も、前後輪制動力配分制御が実行される減速度と同程度の減速度に於いて有意に効果を発揮する。従って、上記の本発明の装置は、車両の制動中に前後輪制動力配分制御が実行されて車両の左右後輪のホイールシリンダ圧が保持された状態に於いて実際に発生しているヨーレートの大きさが所定の大きさを越えて増大したときに、車両の左右後輪に於いて前記の減圧処理及び前記の増圧処理のうちの少なくとも一方の制御時間に亙る実行が為されるようになっていてよい。この場合、減圧処理又は増圧処理の対象となる後輪のホイールシリンダ圧が、減圧処理又は増圧処理の実行開始時に保持された状態となっているので、減圧処理又は増圧処理の実行が容易であることは理解されるべきである。(後輪のホイールシリンダ圧の推定値は、前後輪制動力配分制御実行時の後輪のホイールシリンダ圧又はマスタシリンダ圧が用いられてよい。)
【0015】
また、本発明の対象となる過大なヨーレートを抑制するための制動力差を発生する制御は、車両が制動中に運転者の想定とは異なって発生したヨー運動を抑制するものであり、運転者の操舵とは独立に実行されるものである。従って、運転者のハンドル操作による車両の旋回中に於いては、元々、運転者は車両のヨー運動を意図しているので、過度に運転者の操舵とは独立のヨーモーメントを強制的に発生させる必要はない。そこで、上記の本発明の装置は、車両の直進制動中に実際に発生しているヨーレートの大きさが所定の大きさを越えて増大したとき、前記の減圧処理及び前記の増圧処理のうちの少なくとも一方の制御時間に亙る実行が為されるように構成されていてよい。この場合、制動力差発生のためのホイールシリンダの減圧処理又は増圧処理は、実際に発生しているヨーレートの大きさが所定の大きさを越えて増大したときにのみ実行されるようになっているので、制御処理が簡便となる。
【発明の効果】
【0016】
かくして、上記の本発明の制動制御装置によれば、或る制御時間に亙る各輪のホイールシリンダと高流体圧源又は低流体圧源との連通によるホイールシリンダ圧の増減圧処理によって左右輪の制動力差を発生し、これにより、過大なヨーレートを抑制する制動制御に於いて、ホイールシリンダの増圧速度又は減圧速度の変動を制御時間の長短によって補償し、これにより、一度の増減圧処理に於けるホイールシリンダ圧の変化量を安定化させてヨーレートの抑制のための左右輪の制動力差を発生することが可能となる。また、上記の構成によれば、ホイールシリンダの増圧速度又は減圧速度の変動が補償された態様にて制動力差の発生処理が実行されることから、制動力差の発生処理の回数自体が低減され、短期間にて適切にヨーレートの抑制が為されることが期待される。更に、制御に利用するパラメータは、ヨーレート、車両の減速度、マスタシリンダ圧等から推定されるホイールシリンダ圧の推定値など、多くの一般的な自動車に装備された手段から取得可能な値であり、各輪のホイールシリンダ圧を直接に検出する手段を装備しなくてもよいので、本発明の装置は、制動系のための設計・製造のためのコストを大幅に増大することなく実現可能であることは理解されるべきである。
【0017】
本発明のその他の目的及び利点は、以下の本発明の好ましい実施形態の説明により明らかになるであろう。
【図面の簡単な説明】
【0018】
【図1】図1(A)は、本発明の好ましい実施形態である車両の制動制御装置が搭載される車両の模式図である。図1(B)は、本発明の制動制御装置により制御される流体圧式(油圧式、空気圧式など)制動装置の配管構成の模式図である。図中、マスタシリンダカット弁50A、50B、油圧保持弁54iは、常開型のソレノイド弁であり、減圧弁58iは、常閉型のソレノイド弁である。図に於いて、各弁の設定は、前後輪制動力配分制御、左右後輪の制動力差付与が行われていない状態となっている。
【図2】図2は、本発明による制動制御装置の好ましい実施形態を実現する電子制御装置の制御ブロック図である。
【図3】図3(A)は、本発明の車両の制動制御装置の処理の流れをフローチャートの形式で表したものである。図3(B)、(C)、(D)は、左右後輪の制動力差付与を実行する際の制御時間の補正量を決定するマップを示している。
【図4】図4(A)は、前後輪制動力配分制御が実行された状態での各輪制動力の大きさと向きとを説明する図であり、図4(B)は、前後輪制動力配分制御が実行された状態で更に左右後輪の制動力差付与が行われた状態での各輪制動力の大きさと向きとを説明する図である。図4(C)は、前後輪制動力配分制御と左右後輪の制動力差付与とが実行される場合のマスタシリンダ圧(点線)、後輪ホイールシリンダ圧(一点鎖線:マスタシリンダ圧が比較的低いときに前後輪制動力配分制御が実行された場合。実線:マスタシリンダ圧が比較的高くになってから、前後輪制動力配分制御が実行された場合)の時間変化を模式的に表す図である。
【図5】図5(A)は、ホイールシリンダ圧とホイールシリンダ内に流入した流体の量(体積)との関係を示すグラフ図である。図5(B)は、所与のマスタシリンダ圧(一点鎖線)のときにホイールシリンダの増圧を実行したときのホイールシリンダ圧の時間変化(点線)と、ホイールシリンダの減圧を実行したときのホイールシリンダ圧の時間変化(実線)とを例示したものである。図5(C)は、ホイールシリンダ圧に対するホイールシリンダの増圧速度の変化(点線)とホイールシリンダの減圧速度の変化(実線)とを示すグラフ図である。
【発明を実施するための形態】
【0019】
以下に添付の図を参照しつつ、本発明を幾つかの好ましい実施形態について詳細に説明する。図中、同一の符号は、同一の部位を示す。
【0020】
装置の構成
図1(A)は、本発明の制動制御装置の好ましい実施形態が組み込まれる自動車を模式的に示している。同図に於いて、左右前輪12FL、12FRと、左右後輪12RL、12RRを有する車両10には、通常の態様にて、運転者によるアクセルペダルの踏込みに応じて各輪に制駆動力を発生する駆動系装置(一部のみ図示)と、前輪の舵角を制御するためのステアリング装置30(更に、後輪用の操舵装置が設けられていても良い。)と、各輪に制動力を発生する制動系装置40とが搭載される。駆動系装置は、通常の態様にて、エンジン及び/又は電動機(図示せず)から、変速機(図示せず)、差動歯車装置28等を介して、駆動トルク或いは回転力が後輪12RL、12RRへ伝達されるよう構成されている。また、ステアリング装置は、運転者によって作動されるステアリングホイール32の回転を、倍力装置34により回転力を倍力しながら、タイロッド36L、Rへ伝達し前輪12FL、10FRを転舵するパワーステアリング装置であってよい。
【0021】
制動系装置40は、運転者によりブレーキペダル44の踏込みに応答して作動されるマスタシリンダ45に連通した流体圧回路46によって、各輪に装備されたホイールシリンダ42FL、42FR、42RL、42RR内のホイールシリンダ圧、即ち、各輪に於ける制動力が調節される形式の電子制御式の流体圧式制動装置である。流体圧回路46は、図1(B)に示されている如く、X配管構成であり、左前輪と右後輪の対のホイールシリンダ42FL、42RRのホイールシリンダ圧を制御する回路46Aと、右前輪と左後輪の対のホイールシリンダ42FR、42RLのホイールシリンダ圧を制御する回路46Bを含み(2つの回路は、同じ配管構造を有していてよい。)、それぞれのホイールシリンダ42i(i=FL、FR、RL、RR 以下同様。)には、マスタシリンダ45の弁室45A、Bと各ホイールシリンダとの連通を制御する常開型の増圧弁54iと、リザーバタンク又はバッファリザーバ56A、Bとの連通を制御する常閉型の減圧弁58iとが設けられている。通常の作動に於いては、ブレーキペダル44の踏込みに応答して、マスタシリンダ45の圧力(マスタシリンダ圧)が、回路46A、Bを介して、それぞれのホイールシリンダ42i(i=FL、FR、RL、RR 以下同様。)へ供給される。しかしながら、車両の制動中、後輪が先にロックすることを回避するために前後輪制動力配分制御が実行される場合には、電子制御装置60(図1(A)参照)の指令に基づいて、左右後輪のホイールシリンダ42RL、RRの増圧弁54RL、RRが閉弁され、左右後輪のホイールシリンダ圧が保持される。また、後により詳細に説明される如く、前後輪制動力配分制御の実行中に車両のヨーレートの大きさが過大になったときには、ヨーレートの大きさを抑制する方向のヨーモーメントを発生するために、電子制御装置60の指令に基づいて、一時的に(“制御時間”に亙って)左右後輪のうちの一方の増圧弁54が開弁されて対応するホイールシリンダ圧が増圧され、左右後輪のうちの他方の減圧弁58が開弁されて対応するホイールシリンダ圧が減圧される。更に、図示の例では、上記の構成に加えて、ABS制御などの各輪の制動力を個別に又は独立に調節する目的で更に回路46A、Bとマスタシリンダ弁室45A、Bとの連通を制御する常開型のマスタシリンダカット弁50A、B、マスタシリンダカット弁が閉弁中に回路46A、B内の圧力を昇圧するためのポンプ52A、Bが設けられていてよい(本発明による制御の実行には必須の構成ではない。)。
【0022】
なお、本発明は、ホイールシリンダ圧の検出値を用いない制動制御が対象となっているので、上記の制動系に於いては、直接に検出するセンサは設けられていなくてよい。
【0023】
再び、図1(A)を参照して、制動系装置40の作動を制御する電子制御装置60は、通常の形式の、双方向コモン・バスにより相互に連結されたCPU、ROM、RAM及び入出力ポート装置を有するマイクロコンピュータ及び駆動回路を含んでいてよい。電子制御装置60には、車両の各部に設けられたセンサから、ブレーキペダル踏込量θb、操舵角δ、車輪速Vwi、前後Gセンサ及びヨーレートセンサ62の検出値等の本実施形態の車両に於いて実行されるべき各種制御に必要な種々のパラメータ信号が入力されてよい。
【0024】
本発明の制動制御装置の特徴的な構成及びその作動は、電子制御装置60の内部の構成及びその内部に記憶されたプログラムに従った作動により実現される。図2は、電子制御装置の本発明の制駆動制御に係る構成を機能ブロック図の形式で示したものである。同図を参照して、電子制御装置60には、過大なヨーレートを抑制するための後輪制動力差の発生を指示する左右後輪制動力配分制御部60aと、前後輪制動力配分制御の実行を指示する前後輪制動力配分制御部60bと、制御部60a、60bの制御指示に従って、流体圧回路46内の各弁の開閉作動のための指令を決定し送出するための制御指令決定部60cとを含む。前後輪制動力配分制御部60bは、車両の制動中、車輪速センサから得られる前後輪の車輪速値Vwiを比較して、後輪が先にロックする可能性が生ずると(典型的には、後輪車輪速が前輪車輪速よりも所定値を越えて下回ったとき)、上記に触れたように、後輪の増圧弁54を閉弁して後輪のホイールシリンダ圧を保持し、後輪の制動力の増大を禁止するよう制御指令決定部60cへ制御指示を与える。左右後輪制動力配分制御部60aは、後により詳細に述べる態様により、前後輪制動力配分制御の実行中に、ヨーレートセンサからのヨーレート値γ又は前後輪の車輪速値Vwiに基づいて、ヨーレートが過大であるか否かを判定し、ヨーレートが過大であると判定されたときには、前後Gセンサからの前後加減速度gx、マスタシリンダ圧Pm又はブレーキペダル踏込量θb等の値に基づいて決定される制御時間に亙って左右後輪に於いて制動力差を付与するべく増圧弁又は減圧弁を開弁するよう制御指令決定部60cへ制御指示を与える。なお、左右後輪制動力配分制御部60aによる制御に於いて、左右後輪のホイールシリンダ圧の推定値が利用される場合には、制御指令決定部60cから左右後輪の増圧弁又は減圧弁の開閉状態を表す情報が入力されるようになっていてよい。
【0025】
ヨーレート抑制のための左右後輪制動力配分制御の改良
既に触れたように、本実施形態に於いては、図4(A)に示されている如く、車両の制動中に前後輪制動力配分制御が実行され、後輪制動力が保持されている状態で、車両のヨーレートが過大になったときには、図4(B)に示されている如く、ヨーレートの向きと同じ側(図では右側)の後輪のホイールシリンダを減圧して制動力を低下し、ヨーレートの向きと逆側(図では左側)の後輪のホイールシリンダを増圧して制動力を増大し、これにより左右後輪に制動力差を付与することによって、ヨーレートを抑制するヨーモーメントを車両の重心G周りに発生する左右後輪制動力配分制御が実行される。なお、本実施形態による左右後輪制動力配分制御の作用は、車両の減速度が前後輪制動力配分制御の実行される減速度と同程度まで増大してから有意に効果があるため、本実施形態の装置は、前後輪制動力配分制御が実行されていないときには、左右後輪制動力差の付与を実行しないよう構成される。
【0026】
かかる前後輪制動力配分制御及び左右後輪制動力配分制御が実行されるまでの後輪のホイールシリンダ圧の変化について参照すると、ブレーキペダルの踏込み開始(車両の制動開始)時に於いて、車両の全輪の増圧弁が開放されているので、図4(C)に例示されている如く、後輪のホイールシリンダ圧(W/C圧)は、マスタシリンダ圧(図中、点線)に追従して上昇する。そして、後輪の車輪速が前輪の車輪速よりも所定値を越えて下回ると、後輪が前輪よりも先にロックすることを回避するために前後輪制動力配分制御が作動され、後輪の増圧弁が閉弁され、後輪のホイールシリンダ圧は保持されることとなる。そして、かくして後輪のホイールシリンダ圧が保持された状態で、車両のヨーレートが過大になると、左右後輪制動力配分制御が作動し、左右後輪のうちの一方のホイールシリンダの増圧弁と他方のホイールシリンダの減圧弁とが制御時間に亙って一時的に開弁され、これにより、左右後輪のホイールシリンダ圧差が発生され、左右後輪に於いて制動力差が付与されることとなる。
【0027】
上記の一連の制御作動に於いて、前後輪制動力配分制御の作動の時期は、路面の摩擦状態、減速度に依存するので、後輪ホイールシリンダの増圧弁が閉弁されるときの後輪のホイールシリンダ圧、即ち、後輪の保持圧は、そのときどきで異なることとなる。例えば、図中、一点鎖線にて示されているように比較的低圧にて後輪のホイールシリンダ圧が保持されることもあれば、実線にて示されているように比較的高圧にて後輪のホイールシリンダ圧が保持されることもある。かかる状況に於いて、左右後輪に制動力差を付与するために所定の制御時間に亙ってホイールシリンダの増圧弁及び減圧弁を開弁すると、図4(C)の実線にて示されている場合と一点鎖線にて示されている場合とで発生する左右輪の圧力差が異なっているように、左右後輪間でのホイールシリンダ圧差、即ち、制動力差が、そのときどきで異なることとなり、結局、一度のホイールシリンダの増圧弁及び減圧弁の開弁実行にて発生されるヨーモーメントが不安定となる。
【0028】
上記の左右後輪間でのホイールシリンダ圧差がそのときどきで異なる原因は、ホイールシリンダ圧の増圧速度及び減圧速度が後輪のホイールシリンダ圧、マスタシリンダ圧及びこれらの差に依存して変動するためである。一般にホイールシリンダに於ける圧力とシリンダ内に流入した流体の量との関係は、図5(A)に例示されている如く、ホイールシリンダ圧が低い領域では、シリンダ内部を膨張するために要する容積が大きく、ホイールシリンダ圧が高い領域よりもより多くの流入量を要する。従って、流体の流入出速度が一定の場合、ホイールシリンダ圧が低いときには、増圧速度及び減圧速度は低くなる。一方、ホイールシリンダ圧とマスタシリンダ圧(高流体圧源)又はリザーバ圧(低流体圧源)との関係でみると、マスタシリンダ圧又はリザーバ圧とホイールシリンダ圧との差圧が大きいほど増圧速度及び減圧速度は大きくなる。従って、図5(B)に例示されている如く、或る所与のマスタシリンダ圧に於いてホイールシリンダとマスタシリンダとを連通したときのホイールシリンダ圧の変化は、図中、点線にて示されている如くホイールシリンダ圧が低いときには遅く、ホイールシリンダ圧が中程度のときには早く、ホイールシリンダ圧がマスタシリンダ圧に近づいてくると、再び遅くなる。また、或る所与の圧力にあるホイールシリンダをリザーバに連通したときのホイールシリンダ圧の変化は、図中、実線にて示されている如く、時間と伴に徐々に遅くなる。
【0029】
図5(C)は、上記のホイールシリンダ圧の増圧速度及び減圧速度に於けるホイールシリンダ圧、マスタシリンダ圧の大きさに対する依存性をまとめたグラフ図である。同図を参照して、まず、減圧速度は、リザーバの圧力は一定のため、ホイールシリンダ圧が高いときほど、高くなる。一方、増圧速度は、マスタシリンダ圧が高いときほど、増大すると同時に、ホイールシリンダ圧が低いときと高いとき(マスタシリンダ圧に近づいたとき)に於いて低減するという特性を有することとなる。
【0030】
かくして、本実施形態では、左右後輪制動力配分制御に於いて、一度のホイールシリンダの増圧弁及び減圧弁の開弁実行にて発生されるヨーモーメントの安定化を図るために、上記のホイールシリンダ圧の増圧速度及び減圧速度に於けるホイールシリンダ圧、マスタシリンダ圧の大きさに対する依存性を考慮して、ホイールシリンダ圧の増圧速度及び減圧速度の変化を補償するように増圧弁及び減圧弁を開弁する制御時間が変更される(増圧速度及び減圧速度が低いときには、制御時間を長くする。)。かかる制御時間の変更に関して、既に述べた如く、本実施形態の制動系には、ホイールシリンダ圧を直接に検出する手段が装備されていない。そこで、左右後輪制動力配分制御を実行する左右後輪制動力配分制御部60aに於いては、後輪のホイールシリンダ圧に対応する指標として利用可能な任意のパラメータを用いて制御時間の変更が行われる。
【0031】
後輪のホイールシリンダ圧に対応する指標として、具体的には、車両の減速度、後輪ホイールシリンダ圧の推定値であってよい。車両の減速度は、車輪−路面間に於いて実際に発生している制動力に対応していることから、車両の減速度の変化は、概ね、後輪ホイールシリンダ圧に対応して変化するので、後輪ホイールシリンダ圧の指標として用いることができる。後輪ホイールシリンダ圧の推定値は、任意の手法で求められてよいところ、典型的には、マスタシリンダ圧と増圧弁の開弁時間とから推定されるようになっていてよい。例えば、後輪ホイールシリンダ圧の推定値Prw_estは、ブレーキペダルの踏込み前は、リザーバ圧Poであるとし、また、増圧弁が開弁しているときの微小時間に於けるホイールシリンダ圧の増圧量ΔPuがマスタシリンダ圧Pmとそのときホイールシリンダ圧Prwとの差の関数であり、減圧弁が開弁しているときの微小時間に於けるホイールシリンダ圧の減圧量ΔPdがリザーバ圧Poとそのときホイールシリンダ圧Prwとの差の関数であるとして、微小時間のホイールシリンダ圧の増圧量及び減圧量を逐次加算又は減算することにより、即ち、
Prw_est=Prw_est(前回値)+ΔPu(Pm−Prw_est(前回値))−ΔPd(Prw_est(前回値)−Po) …(A)
により与えられる。ΔPuは、Pm−Prw_est(前回値)の関数であり、ΔPdは、Prw_est(前回値)−Poの関数である。Prw_est(前回値)は、ブレーキペダルの踏込み開始時は、リザーバ圧Poとされる。ΔPuの項は、増圧弁が開弁されているときのみ加算され、ΔPdは、減圧弁が開弁されているときのみ減算される。
【0032】
装置の作動
上記の本実施形態の制動制御装置に於けるヨーレート抑制のための左右後輪制動力配分制御は、左右後輪制動力配分制御部60aが、図3(A)に例示されたフローチャートにて示された制御処理を、車両の走行中、所定のサイクル時間にて繰り返し実行することにより達成される。かかる制御処理に於いて、特に、左右後輪に制動力差を付与するための左右後輪のホイールシリンダ圧の増圧及び減圧処理を実行する制御時間(ホイールシリンダの増圧弁及び減圧弁の開弁時間)は、上記の如くホイールシリンダ圧の増圧速度及び減圧速度の変化を補償するために、車両の減速度又は後輪ホイールシリンダ圧の推定値、増圧及び減圧処理の実行回数及び/又はマスタシリンダ圧と後輪ホイールシリンダ圧の推定値との差に基づいて設定される。
【0033】
図3(A)に例示された制御処理に於いては、具体的には、まず、前後輪制動力配分制御が実行中か否かが判定される(ステップ10)。なお、前後輪制動力配分制御が実行中か否かの情報は、前後輪制動力配分制御部60bから左右後輪制動力配分制御部60aへ与えられる。既に述べた如く、前後輪制動力配分制御が実行されていないときには、左右後輪制動力配分制御は実行されない。(前後輪制動力配分制御が実行されていないときには、左右後輪のホイールシリンダ圧の増圧及び減圧処理の実行回数Cが常に0にリセットされる(ステップ15)。)
【0034】
前後輪制動力配分制御が実行中のときには、次いで、過大なヨーレートを抑制するためのヨーモーメントを発生するために左右後輪に於いて制動力差を付与すべき条件が成立しているか否かが判定される(ステップ20)。かかる制動力差付与条件としては、具体的には、例えば、ヨーレートセンサにて直接に計測されるか又は左右輪の車輪速の差から求められる現在のヨーレート値γと、前輪舵角δと車速(各輪車輪速から任意の手法で決定されてよい。)とに基づいて任意の手法にて演算される想定されるヨーレートγtとの差|γ−γt|について、
|γ−γt|>γo …(1)
が成立していることであってよい(γoは、実験的又は理論的に任意に設定されてよい定数である。)。なお、本実施形態の左右後輪制動力配分制御は、運転者の想定とは異なって発生したヨー運動を抑制すべく運転者の操舵とは独立のヨーモーメントを強制的に発生させるものであるところ、運転者のハンドル操作による車両の旋回中に於いては、元々、運転者は車両のヨー運動を意図しているので、過度に運転者の操舵とは独立のヨーモーメントを強制的に発生させる必要はない。そこで、制動力差付与条件として、車両の直進制動中に、現在のヨーレート値γが過大になったこと、即ち、
舵角|δ|<δoのときに|γ|>γo …(2)
が成立していることであってもよい(δoは、任意に設定される所定角度)。この場合、想定されるヨーレートγtを具体的に演算する必要がないため、演算処理負荷が低減されることとなる。上記の条件(1)又は(2)が成立していないときには、左右後輪制動力差の付与は実行されない。
【0035】
かくして、ステップ20に於いて制動力差付与条件が成立すると、現在の前後輪制動力配分制御が開始された後、即ち、後輪のホイールシリンダ圧が保持された後の左右後輪のホイールシリンダ圧の増圧及び減圧処理の実行回数Cがカウントされ(ステップ25)、制御時間の設定が為される(ステップ30)。
【0036】
ステップ30に於いては、増圧弁を開弁して増圧される側と減圧弁を開弁して減圧される側のそれぞれについて、制御時間Tが
T←To+ΔT …(3)
により設定される。ここで、Toは、制御時間Tの初期設定値であり、典型的には、マスタシリンダ圧が任意の比較的高い値にあるときに、ホイールシリンダ圧が中程度の任意の値に設定されている状態で、ホイールシリンダ圧の増圧及び減圧処理をしたときに、ホイールシリンダ圧に適当な左右差が生ずる時間に設定される(具体的には、実験的又は理論的に任意に設定されてよい定数である。)。ΔTは、ホイールシリンダ圧の増圧速度及び減圧速度の変動を補償するための補正項であり、具体的には、下記の(a)、(b)のいずれかにより設定される。
(a)前後輪制動力配分制御開始後、初めて後輪ホイールシリンダ圧の増圧及び減圧処理を実行するとき(C=1のとき):
増圧側 ΔT=ΔT1+ΔT3 …(4a)
減圧側 ΔT=ΔT1 …(4b)
(b)既に後輪ホイールシリンダ圧の増圧及び減圧処理が実行されているとき(C>1のとき):
増圧側 ΔT=ΔT2+ΔT3 …(5a)
減圧側 ΔT=ΔT2 …(5b)
【0037】
上記に於いて、式(4a)、(4b)のΔT1は、車両の減速度(加減速度の絶対値)|Gx|又は後輪ホイールシリンダ圧の推定値Prw_estをパラメータとして、図3(B)のマップから与えられる。従って、増圧側では、図中、点線にて示されている如く、図4(C)のホイールシリンダ圧に対する増圧速度の変化に対応して、|Gx|又はPrw_estが第一の所定値q1より低いとき(前後輪制動力配分制御が比較的低い減速度に於いて又は制動力が高くなっていないときに開始されたとき)と|Gx|又はPrw_estが第二の所定値q2より高いとき(前後輪制動力配分制御が比較的高い減速度に於いて又は制動力が比較的高くなったときに開始されたとき)には、増圧速度が低いので、制御時間Tは、Toよりも延長されることとなる。また、図4(C)のホイールシリンダ圧に対する減圧速度の変化に対応して、減圧側では、|Gx|又はPrw_estが低いほど(所定値q3より低いとき)、減圧速度が低いので、制御時間Tは、長く設定されることとなる。なお、図3(B)のマップに於いて後輪ホイールシリンダ圧の推定値Prw_estがパラメータとして利用される場合、後輪ホイールシリンダ圧の推定値Prw_estは、マスタシリンダ圧Pmと弁の開閉情報とを用いて、上記の式(A)により算出されてよい。また、マスタシリンダ圧Pmは、ブレーキペダルの踏込量θbに対応するので、直接計測されたものではなく、ブレーキペダルの踏込量θbに基づいて決定された値であってもよい。
【0038】
式(5a)、(5b)のΔT2は、前後輪制動力配分制御開始後の後輪ホイールシリンダ圧の増圧及び減圧処理の実行回数Cをパラメータとして、図3(C)のマップから与えられる。既に触れたように、本実施形態の制御では、後輪ホイールシリンダ圧の増圧及び減圧処理を実行してヨーモーメントを付与した後に、ヨーレートが抑制されないとき、つまり、条件(1)又は(2)が成立するときには、後輪ホイールシリンダ圧の増圧及び減圧処理が繰り返し実行される。その場合、既に、後輪ホイールシリンダ圧の増圧及び減圧処理が実行されている場合には、かかる処理を実行する前よりも、増圧側の後輪ホイールシリンダ圧は、マスタシリンダ圧に近づき、減圧側の後輪ホイールシリンダ圧は、リザーバ圧に近づいていることになり、増圧速度又は減圧速度は低減していることとなる。従って、図3(C)に示されている如く、後輪ホイールシリンダ圧の増圧及び減圧処理が繰り返される度に、増圧速度又は減圧速度の低減を補償すべく、制御時間が延長される。
【0039】
式(4a)、(5a)のΔT3は、マスタシリンダ圧Pmと後輪ホイールシリンダ圧の推定値Prw_estとの差Pm−Prw_estをパラメータとして、図3(D)のマップから与えられる。図4に関連した説明から理解されるように、増圧側の後輪ホイールシリンダ圧の増圧速度は、マスタシリンダ圧と後輪ホイールシリンダ圧との差が小さいほど遅くなる。そこで、かかる増圧速度の変化を補償すべく、制御時間は、圧力差Pm−Prw_estが低いほど延長される。後輪ホイールシリンダ圧の推定値Prw_estは、マスタシリンダ圧Pmと弁の開閉情報とを用いて、上記の式(A)により算出されたものでよく、マスタシリンダ圧Pmは、ブレーキペダルの踏込量θbに基づいて決定された値であってもよい。
【0040】
そして、上記の如く制御時間が設定されると、現在のヨーレートの向きと同じ側の後輪のホイールシリンダについては、上記の制御時間に亙って減圧弁が開弁され、現在のヨーレートの向きと逆側の後輪のホイールシリンダについては、上記の制御時間に亙って増圧弁が開弁されるよう制御指令決定部に制御指示が送られ、増圧・減圧が実行される(ステップ40)。
【0041】
かくして、上記の構成によれば、車両の制動中に過大なヨーレートを抑制するために左右後輪に制動力差を付与する後輪ホイールシリンダ圧の増圧及び減圧処理を実行する際に、増圧速度及び減圧速度が低い状況に於いては、増圧弁と減圧弁を開弁する制御時間が延長され、これにより、一度の増圧及び減圧処理でより大きな制動力差又はヨーモーメントを安定的に発生することが可能となる。そして、一度の増圧及び減圧処理で発生するヨーモーメントが大きくなることから、過大なヨーレートをより迅速に抑制することが可能となる。
【0042】
また、上記の構成に於いて、本実施形態の制御は、ホイールシリンダ圧を直接に検出するためのセンサ等の装備を必要とせず、通常の自動車に於いて装備されているセンサ、車輪速センサ、マスタシリンダ圧センサ又はブレーキペダルセンサ、前後Gセンサ、或いは、ヨーレートセンサ(車輪速からヨーレートを算出する場合には必須ではない。)等からの検出値を用いて達成されるので、制御に必要な装備のコストを殆ど増大しなくてよいことは、理解されるべきである。
【0043】
以上の説明は、本発明の実施の形態に関連してなされているが、当業者にとつて多くの修正及び変更が容易に可能であり、本発明は、上記に例示された実施形態のみに限定されるものではなく、本発明の概念から逸脱することなく種々の装置に適用されることは明らかであろう。
【0044】
例えば、過大なヨーレートを抑制するための左右制動力差は前輪又は全輪に付与されるようになっていてもよい。また、かかる左右制動力差は、ヨーレートの向きと同じ側の車輪のホイールシリンダ圧の減圧処理とヨーレートの向きと逆側の車輪のホイールシリンダ圧の増圧処理とのうちのいずれか一方のみ実行することにより生成されてもよく、その場合にも上記の如き、増圧速度又は減圧速度の変化を補償する制御時間の変更が実行されるようになっていてよい。更に、上記の過大なヨーレートを抑制するための左右制動力差の付与は、前後輪制動力配分制御の実行の有無にかかわらず実行されてもよい。
【0045】
更にまた、増圧速度又は減圧速度の変化を補償する制御時間の変更の態様又は補正量ΔTの設定は、ホイールシリンダ圧の増圧速度又は減圧速度の変化特性に応じて決定されるべきであり、図3(B)〜(D)に例示のマップに限定されない。また、ホイールシリンダ圧の増圧は、マスタシリンダカット弁が閉鎖しているときには、ポンプにより昇圧によって為されてよい(その場合、高流体圧源は、ポンプとなる。)
【0046】
また、例示の実施形態では、本発明は、ホイールシリンダ圧を検知する手段が設けられていない制動系に適用されているが、ホイールシリンダ圧を検知する手段が設けられていてもかかる手段が正常に機能せず、ホイールシリンダ圧の検出値が精度よく得られない場合に適用されてもよいことが理解されるべきである。
【符号の説明】
【0047】
10…車両
12FL,FR,RL,RR…車輪
30…ステアリング装置
40…制動系装置
44…ブレーキペダル
42FL,FR,RL,RR…ホイールシリンダ
45…マスタシリンダ
46…流体圧回路
54FL,FR,RL,RR…増圧弁
56A、B…リザーバ
58FL,FR,RL,RR…減圧弁
60…電子制御装置
【特許請求の範囲】
【請求項1】
各輪のホイールシリンダが高流体圧源又は低流体圧源へ選択的に連通されることにより前記各輪のホイールシリンダ圧を選択的に増圧又は減圧することが可能であり且つ前記各輪のホイールシリンダ圧の検出値を用いずに前記各輪のホイールシリンダ圧を増減する車両の流体圧式制動系に於いて、前記車両の制動中に実際に発生しているヨーレートの大きさが想定されるヨーレートの大きさよりも所定の大きさを越えて増大したとき、前記実際に発生しているヨーレートの方向と同じ側の車輪のホイールシリンダを前記低流体圧源へ連通することによる前記実際に発生しているヨーレートの方向と同じ側の車輪のホイールシリンダ圧の減圧処理及び前記実際に発生しているヨーレートの方向とは反対の側の車輪のホイールシリンダを前記高流体圧源へ連通することによる前記実際に発生しているヨーレートの方向とは反対の側の車輪のホイールシリンダ圧の増圧処理のうちの少なくとも一方を制御時間に亙って実行し、これにより前記車両の左右輪に於いて前記実際に発生しているヨーレートの大きさを低減する方向にヨーモーメントを発生するための制動力差を付与する車両の制動制御装置であって、前記制御時間が前記増圧処理又は減圧処理の実行開始時の前記車両の減速度又は前記各輪のホイールシリンダ圧の推定値に基づいて変更されることを特徴とする制動制御装置。
【請求項2】
請求項1の装置であって、前記増圧処理の実行開始時の前記車両の減速度又は前記各輪のホイールシリンダ圧の推定値が第一の所定値よりも小さいときには、前記増圧処理の実行開始時の前記車両の減速度又は前記各輪のホイールシリンダ圧の推定値が小さいほど、前記増圧処理を実行する前記制御時間が長く設定されることを特徴とする装置。
【請求項3】
請求項2の装置であって、前記増圧処理の実行開始時の前記車両の減速度又は前記各輪のホイールシリンダ圧の推定値が前記第一の所定値よりも大きい第二の所定値を越えているときには、前記増圧処理の実行開始時の前記車両の減速度又は前記各輪のホイールシリンダ圧の推定値が大きいほど、前記増圧処理を実行する前記制御時間が長く設定されることを特徴とする装置。
【請求項4】
請求項1乃至3のいずれかの装置であって、前記減圧処理の実行開始時の前記車両の減速度又は前記各輪のホイールシリンダ圧の推定値が大きいほど、前記減圧処理を実行する前記制御時間が短く設定されることを特徴とする装置。
【請求項5】
請求項1乃至4のいずれかの装置であって、前記減圧処理及び前記増圧処理のうちの少なくとも一方の前記制御時間に亙る実行が複数回為され、前記実行が為される度に前記制御時間が長く設定されることを特徴とする装置。
【請求項6】
請求項1乃至5のいずれかの装置であって、前記高流体圧源の圧力が前記車両の運転者の制動操作量の増減に対応して増減し、前記増圧処理の実行開始時の前記高流体圧源の圧力と前記各輪のホイールシリンダ圧の推定値との差が大きいほど前記増圧を実行する前記制御時間が短く設定されることを特徴とする装置。
【請求項7】
請求項1乃至6のいずれかの装置であって、前記車両の制動中に前後輪制動力配分制御が実行されて前記車両の左右後輪のホイールシリンダ圧が保持された状態に於いて前記実際に発生しているヨーレートの大きさが所定の大きさを越えて増大したとき、前記車両の左右後輪に於いて前記減圧処理及び前記増圧処理のうちの少なくとも一方の前記制御時間に亙る実行が為されることを特徴とする装置。
【請求項8】
請求項1乃至7のいずれかの装置であって、前記車両の直進制動中に前記実際に発生しているヨーレートの大きさが所定の大きさを越えて増大したとき、前記減圧処理及び前記増圧処理のうちの少なくとも一方の前記制御時間に亙る実行が為されることを特徴とする装置。
【請求項1】
各輪のホイールシリンダが高流体圧源又は低流体圧源へ選択的に連通されることにより前記各輪のホイールシリンダ圧を選択的に増圧又は減圧することが可能であり且つ前記各輪のホイールシリンダ圧の検出値を用いずに前記各輪のホイールシリンダ圧を増減する車両の流体圧式制動系に於いて、前記車両の制動中に実際に発生しているヨーレートの大きさが想定されるヨーレートの大きさよりも所定の大きさを越えて増大したとき、前記実際に発生しているヨーレートの方向と同じ側の車輪のホイールシリンダを前記低流体圧源へ連通することによる前記実際に発生しているヨーレートの方向と同じ側の車輪のホイールシリンダ圧の減圧処理及び前記実際に発生しているヨーレートの方向とは反対の側の車輪のホイールシリンダを前記高流体圧源へ連通することによる前記実際に発生しているヨーレートの方向とは反対の側の車輪のホイールシリンダ圧の増圧処理のうちの少なくとも一方を制御時間に亙って実行し、これにより前記車両の左右輪に於いて前記実際に発生しているヨーレートの大きさを低減する方向にヨーモーメントを発生するための制動力差を付与する車両の制動制御装置であって、前記制御時間が前記増圧処理又は減圧処理の実行開始時の前記車両の減速度又は前記各輪のホイールシリンダ圧の推定値に基づいて変更されることを特徴とする制動制御装置。
【請求項2】
請求項1の装置であって、前記増圧処理の実行開始時の前記車両の減速度又は前記各輪のホイールシリンダ圧の推定値が第一の所定値よりも小さいときには、前記増圧処理の実行開始時の前記車両の減速度又は前記各輪のホイールシリンダ圧の推定値が小さいほど、前記増圧処理を実行する前記制御時間が長く設定されることを特徴とする装置。
【請求項3】
請求項2の装置であって、前記増圧処理の実行開始時の前記車両の減速度又は前記各輪のホイールシリンダ圧の推定値が前記第一の所定値よりも大きい第二の所定値を越えているときには、前記増圧処理の実行開始時の前記車両の減速度又は前記各輪のホイールシリンダ圧の推定値が大きいほど、前記増圧処理を実行する前記制御時間が長く設定されることを特徴とする装置。
【請求項4】
請求項1乃至3のいずれかの装置であって、前記減圧処理の実行開始時の前記車両の減速度又は前記各輪のホイールシリンダ圧の推定値が大きいほど、前記減圧処理を実行する前記制御時間が短く設定されることを特徴とする装置。
【請求項5】
請求項1乃至4のいずれかの装置であって、前記減圧処理及び前記増圧処理のうちの少なくとも一方の前記制御時間に亙る実行が複数回為され、前記実行が為される度に前記制御時間が長く設定されることを特徴とする装置。
【請求項6】
請求項1乃至5のいずれかの装置であって、前記高流体圧源の圧力が前記車両の運転者の制動操作量の増減に対応して増減し、前記増圧処理の実行開始時の前記高流体圧源の圧力と前記各輪のホイールシリンダ圧の推定値との差が大きいほど前記増圧を実行する前記制御時間が短く設定されることを特徴とする装置。
【請求項7】
請求項1乃至6のいずれかの装置であって、前記車両の制動中に前後輪制動力配分制御が実行されて前記車両の左右後輪のホイールシリンダ圧が保持された状態に於いて前記実際に発生しているヨーレートの大きさが所定の大きさを越えて増大したとき、前記車両の左右後輪に於いて前記減圧処理及び前記増圧処理のうちの少なくとも一方の前記制御時間に亙る実行が為されることを特徴とする装置。
【請求項8】
請求項1乃至7のいずれかの装置であって、前記車両の直進制動中に前記実際に発生しているヨーレートの大きさが所定の大きさを越えて増大したとき、前記減圧処理及び前記増圧処理のうちの少なくとも一方の前記制御時間に亙る実行が為されることを特徴とする装置。
【図1】


【図2】
【図3】

【図4】

【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−260488(P2010−260488A)
【公開日】平成22年11月18日(2010.11.18)
【国際特許分類】
【出願番号】特願2009−113947(P2009−113947)
【出願日】平成21年5月8日(2009.5.8)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年11月18日(2010.11.18)
【国際特許分類】
【出願日】平成21年5月8日(2009.5.8)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]