
車両の制動制御装置
【課題】各モータのうち何れか一つのモータが過熱モータになった場合に、該過熱モータを保護するためのモータ保護制御の実行機会を増やすことができると共に、該モータ保護制御に伴う車両挙動の変化を補正するための車両操作を容易なものとすることができる車両の制動制御装置を提供する。
【解決手段】各車輪に個別対応する各電動ブレーキ装置はモータをそれぞれ備える。各電動ブレーキ装置を制御するブレーキ用ECUは、温度Tが第1の設定閾値Tth1以上となる過熱モータがあるか否かを判定する。そして、ブレーキ用ECUは、過熱モータが一つのみである場合(第3のタイミングt3)、過熱モータに対する電流値Ixを過熱モータの温度Tが低温である場合には高温である場合よりも緩やかな勾配で低下させる。
【解決手段】各車輪に個別対応する各電動ブレーキ装置はモータをそれぞれ備える。各電動ブレーキ装置を制御するブレーキ用ECUは、温度Tが第1の設定閾値Tth1以上となる過熱モータがあるか否かを判定する。そして、ブレーキ用ECUは、過熱モータが一つのみである場合(第3のタイミングt3)、過熱モータに対する電流値Ixを過熱モータの温度Tが低温である場合には高温である場合よりも緩やかな勾配で低下させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の車輪に個別対応する複数の電動ブレーキ装置を制御する車両の制動制御装置に関する。
【背景技術】
【0002】
従来、車両に搭載される制動システムとして、複数の車輪に個別対応する複数の電動ブレーキ装置と、各電動ブレーキ装置を制御する制動制御装置とを備えたシステムの開発が進められている(特許文献1参照)。こうしたシステムを構成する電動ブレーキ装置は、制動制御装置からの指令に基づき駆動するモータを備え、モータに対する電流値に応じた制動力を車輪に付与するようになっている。
【0003】
電動ブレーキ装置に設けられるモータは、その温度が予め設定された耐熱温度以上になっても継続して使用され続けると、異常をきたすおそれがある。そして、上記制動システムでは、各モータの中に異常モータがある場合には、該異常モータを保護するためのモータ保護制御が行われる。このモータ保護制御では、異常モータに対する電流値が急激に低下されると共に、車両の幅方向において異常モータに対応する第1の車輪(例えば、右前輪)の反対側に位置する第2の車輪(例えば、左前輪)に対応するモータ(以下、「正常モータ」ともいう。)が作動される。これにより、第1の車輪に対する制動力が減少しても第2の車輪に対する制動力が減少されない。そのため、車両全体の制動力の減少が低下されると共に、異常モータが良好に保護される。
【0004】
ただし、上記モータ保護制御が開始されると、第1の車輪と第2の車輪との間に制動力差(以下、「左右制動力差」ともいう。)が発生する。その結果、車両のヨーモーメントが大きくなり、車両の挙動が不安定化するおそれがある。そのため、上記制動システムでは、車両の走行状態が安定している場合において異常モータがあるときに、モータ保護制御が行われる。ここでいう「車両の走行状態が安定しているか否か」としては、例えば、「車両の横滑りが発生しにくい状態であるか否か」が挙げられる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−158336号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述したように、温度が耐熱温度を超えてもモータが使用され続けると、モータが故障するおそれがある。モータ保護の観点から考えると、モータが故障する前に、当該モータを保護することが好ましい。そこで、近年では、以下に示す制動システムが考案されている。
【0007】
すなわち、各モータの温度が定期的に取得され、温度が耐熱温度未満の値に設定された温度基準値以上となる過熱モータがあるか否かが判定される。そして、各モータのうち何れか一つのモータが過熱モータであると判定された場合には、過熱モータに対する電流値を急激に低下させると共に、正常モータの作動を継続させるモータ保護制御が行われる。こうした制御が行われることにより、過熱モータの温度上昇が抑制され、過熱モータの温度が耐熱温度以上になる事態が回避される。
【0008】
しかしながら、この場合であっても、モータ保護制御によって、過熱モータに対応する第1の車輪と正常モータに対応する第2の車輪との間に左右制動力差が発生する。この左右制動力差が大きいほど、車両のヨーモーメントが大きくなり、車両挙動が不安定化しやすい。そのため、モータ保護制御に起因して車両がスピンする事態を回避するためには、「車両の走行状態が安定しているか否か」の判断基準を厳しめに設定する必要がある。つまり、モータ保護制御の実行機会が限られてしまう。
【0009】
本発明は、このような事情に鑑みてなされたものである。その目的は、各モータのうち何れか一つのモータが過熱モータになった場合に、該過熱モータを保護するためのモータ保護制御の実行機会を増やすことができると共に、該モータ保護制御に伴う車両挙動の変化を補正するための車両操作を容易なものとすることができる車両の制動制御装置を提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明は、車両に設けられた複数の車輪(FR,FL,RR,RL)に個別対応すると共に、モータ(21)を有する複数の電動ブレーキ装置(12,12a,12b,12c,12d)を制御する車両の制動制御装置であって、前記電動ブレーキ装置(12,12a,12b,12c,12d)は、前記モータ(21)に対する電流値に応じた制動力を、対応する車輪(FR,FL,RR,RL)に付与する構成となっており、前記各モータ(21)の温度(T)を取得する温度取得手段(15、S12)と、取得された温度(T)が過熱傾向であるか否かの判断基準として設定された温度基準値(Tth1)以上となる過熱モータが、前記各モータ(21)の中にあるか否かを判定する判定手段(15、S13)と、前記各モータ(21)のうち何れか一つのモータが前記過熱モータであると判定された場合に、該過熱モータに対する電流値(Ix)を、前記過熱モータの温度(T)が低温である場合には高温である場合よりも緩やかな勾配で低下させるモータ保護制御を行うモータ制御手段(15、S23,S31)と、を備えることを要旨とする。
【0011】
上記構成によれば、各モータのうち何れか一つのモータが過熱モータである場合、該過熱モータの保護を図るために、過熱モータに対する電流値が低下される。過熱モータがあると判定された時点では過熱モータの温度が比較的低いため、過熱モータに対する電流値が緩やかに低下される。そのため、過熱モータの温度が比較的低温である場合には、モータ保護制御の実行に伴う第1の車輪と第2の車輪との制動力差の急増が抑制される。第1の車輪とは、過熱モータの駆動によって制動力が付与される車輪のことであり、第2の車輪とは、車両の幅方向において第1の車輪の反対側に位置する車輪のことである。つまり、モータ保護制御の開始時においては、モータの温度とは関係なく過熱モータに対する電流値を急激に低下させる従来の場合と比較して、モータ保護制御時に車両の挙動が不安定になりにくくなる。
【0012】
その結果、本発明のモータ保護制御が開始されると、車両の挙動が緩やかに変化する。しかし、挙動の変化は従来の場合と比較して緩やかであるため、車両の運転手は、上記モータ保護制御の開始に伴う車両の挙動変化を解消させるための車両操作を、落ち着いて行うことが可能となる。したがって、過熱モータの温度の高低に関係なく過熱モータに対する電流値を急激に低下させる従来の場合と比較して、モータ保護制御の実行機会を増やすことができると共に、該モータ保護制御に伴う車両挙動の変化を補正するための車両操作を容易なものとすることができる。
【0013】
その一方で、モータ保護制御を行っても過熱モータの温度上昇が継続し、該過熱モータの温度が比較的高温になると、過熱モータに対する電流値は、過熱モータの温度が低温である場合よりも急勾配で低下される。そのため、過熱モータが好適に保護される。
【0014】
本発明の車両の制動制御装置において、前記モータ制御手段(15、S23,S31)は、前記モータ保護制御を行う場合に、搭載するモータ(21)が前記過熱モータとなった電動ブレーキ装置(12,12a,12b,12c,12d)によって制動力が付与される第1の車輪(X)とは車両の幅方向において反対側に位置する第2の車輪(Y)に制動力を付与するための電動ブレーキ装置(12,12a,12b,12c,12d)に搭載される正常モータに対する電流値(Iy)を上昇させる調整制御を行うことが好ましい。
【0015】
上記構成によれば、モータ保護制御が行われる場合には、第2の車輪に対応する電動ブレーキ装置に搭載される正常モータに対する電流値を上昇させることにより、第2の車輪に対する制動力が増大される。このように第1の車輪に対する制動力を減少させる際に第2の車輪に対する制動力を増大させても、上記従来の場合と比較して、第1の車輪に対する制動力の減少速度が低速である分、第1の車輪と第2の車輪との制動力差の急増を抑制することができる。その結果、モータ保護制御と共に調整制御が行われる場合であっても、各制御の開始時における車両の挙動は、従来のモータ保護制御及び調整制御の開始時と比較して緩やかに変化する。そのため、車両の運転手は、上記モータ保護制御及び調整制御の開始に伴う車両の挙動変化を解消させるための車両操作を、落ち着いて行うことが可能となる。したがって、従来の場合と比較して、モータ保護制御及び調整制御を行う機会を増やすことができると共に、該モータ保護制御及び調整制御に伴う車両挙動の変化を補正するための車両操作を容易なものとすることができる。また、モータ保護制御及び調整制御の開始前における車両全体の制動力からの変化量を少なくすることができる。
【0016】
本発明の車両の制動制御装置において、前記モータ制御手段(15、S23,S26,S31)は、前記モータ保護制御時に、前記モータ保護制御の実行による車両全体の制動力(BP_all)の減少分を補うように前記正常モータに対する電流値(Ix)が上昇されるように前記調整制御を行うことが好ましい。
【0017】
上記構成によれば、モータ保護制御が行われる場合には、調整制御によって第2の車輪に対応する制動力が増大されるため、車両全体の制動力の減少が抑制される。また、モータ保護制御の開始時においては、第1の車輪に対する制動力の減少速度が従来の場合よりも低速度である分、このときの第2の車輪に対する制動力の増大速度は上記従来の場合と比較して低速度となる。そのため、モータ保護制御及び調整制御の実行に伴う第1の車輪と第2の車輪との制動力差の急増を抑制することができる。その結果、モータ保護制御と共に調整制御が行われる場合であっても、各制御の開始時における車両の挙動は、従来のモータ保護制御及び調整制御の開始時と比較して緩やかに変化する。そのため、車両の運転手は、上記モータ保護制御及び調整制御の開始に伴う車両の挙動変化を解消させるための車両操作を、落ち着いて行うことが可能となる。したがって、車両全体の制動力の減少分を補いつつ、従来の場合と比較してモータ保護制御及び調整制御を行う機会を増やすことができる。
【0018】
本発明の車両の制動制御装置において、前記モータ制御手段(15、S23,S31)は、前記モータ保護制御及び前記調整制御を行う場合、前記第2の車輪(Y)を含む前記第1の車輪(Y)以外の全ての車輪に対する制動力を調整することが好ましい。
【0019】
上記構成によれば、モータ保護制御が行われる場合には、第2の車輪を含む第1の車輪以外の全ての車輪に対する制動力が調整される。
本発明の車両の制動制御装置は、前記モータ保護制御及び前記調整制御の実行によって車両に生じるヨーレートの推定値(YR2)を取得するヨーレート取得手段(15、S29)をさらに備え、前記モータ制御手段(15、S23,S26,S30,S31)は、前記モータ保護制御及び前記調整制御を行う場合に、前記ヨーレート取得手段(15、S29)によって取得されたヨーレートの推定値(YR2)が「0(零)」に近づくように前記各車輪(FR,FL,RR,RL)のうち前記第1及び第2の各車輪(X,Y)以外の他の車輪に対する制動力を調整すべく、該他の車輪に制動力を付与するための電動ブレーキ装置(12,12a,12b,12c,12d)に搭載されるモータ(21)を制御することが好ましい。
【0020】
モータ保護制御及び調整制御が共に行われる場合、車両には第1の車輪と第2の車輪との間の制動力差に応じたヨーレートが発生する。そこで、本発明では、上記各制御の実行に伴い発生したヨーレートの推定値が取得され、該ヨーレートの推定値が「0(零)」に近づくように、第1及び第2の各車輪以外の他の車輪に対する制動力が調整される。そのため、モータ保護制御及び調整制御に伴う車両の挙動の変化を抑制することができる。したがって、過熱モータを保護する際に車両の挙動が不安定になりにくい分、モータ保護制御及び調整制御を行う機会を増やすことができると共に、該モータ保護制御に伴う車両挙動の変化を補正するための車両操作を容易なものとすることができる。
【0021】
なお、本発明をわかりやすく説明するために実施形態を示す図面の符号に対応づけて説明したが、本発明が実施形態に限定されるものではないことは言うまでもない。
【図面の簡単な説明】
【0022】
【図1】本発明の車両の制動制御装置を備える制動システムの一実施形態を示すブロック図。
【図2】過熱モータの温度に応じて電流値の変化勾配を設定するためのマップ。
【図3】(a)(b)は車両の走行状態が安定しているか否かを判定するためのマップ。
【図4】過熱モータに対する電流値を低下させるモータ保護制御を行う際におけるタイミングチャート。
【図5】実施形態の電流値補正処理ルーチンを示すフローチャート(前半部分)。
【図6】実施形態の電流値補正処理ルーチンを示すフローチャート(後半部分)。
【発明を実施するための形態】
【0023】
以下、本発明を具体化した一実施形態を、図1〜図6に従って説明する。なお、以下における本明細書中の説明においては、車両の進行方向(前進方向)を前方(車両前方)として説明する。
【0024】
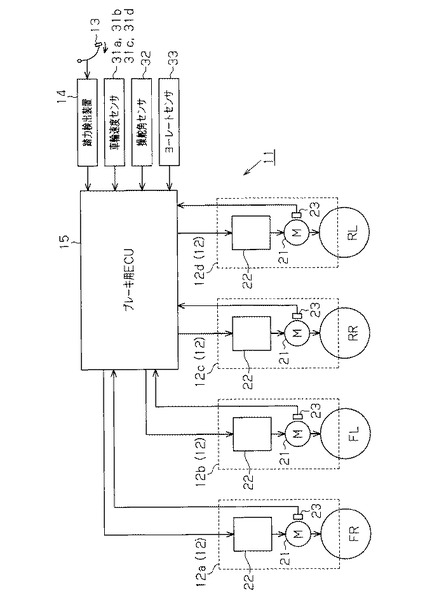
図1に示すように、車両には、複数(本実施形態では4つ)の車輪FR,FL,RR,RLが設けられている。前輪FR,FLは、車両の前後方向において後輪RR,RLの前側に配置されている。また、右前輪FR及び右後輪RRは、車両の幅方向において左前輪FL及び左後輪RLの反対側に配置されている。こうした車両に搭載される制動システム11は、各車輪FR,FL,RR,RLに個別対応する複数(本実施形態では4つ)の電動ブレーキ装置12(12a,12b,12c,12d)と、運転手によるブレーキペダル13の踏力(「操作量」といってもよい。)を検出するための踏力検出装置14と、各電動ブレーキ装置12a〜12dを個別に制御する制動制御装置の一例としてのブレーキ用ECU15とを備えている。
【0025】
次に、電動ブレーキ装置12について説明する。
図1に示すように、電動ブレーキ装置12は、モータ21と、ブレーキ用ECU15からの指令に応じた電流をモータ21に流すべく駆動するモータ用駆動回路22と、モータ21の温度を検出するための温度センサ23とが設けられている。この温度センサ23からは、モータ21の温度に基づいた検出信号がブレーキ用ECU15に出力される。
【0026】
また、電動ブレーキ装置12には、車輪FR,FL,RR,RLと一体回転する円環状のブレーキロータ(図示略)と、ブレーキロータの摩擦面に対向配置されるブレーキパッド(図示略)とが設けられている。このブレーキパッドは、モータ21が駆動すると、該モータ21からの駆動力によってブレーキロータに接近する。そして、ブレーキパッドは、モータ21から伝達された駆動力に応じた押圧力でブレーキロータに摺接する。つまり、本実施形態では、モータ21で発生する駆動力、即ちモータ21に対する電流値に応じた制動力が車輪FR,FL,RR,RLに付与される。
【0027】
次に、本実施形態のブレーキ用ECU15について説明する。
図1に示すように、ブレーキ用ECU15には、各温度センサ23に加え、各車輪FR,FL,RR,RLの車輪速度を検出するための車輪速度センサ31a,31b,31c,31dが電気的に接続されている。また、ブレーキ用ECU15には、車両に搭載されるステアリング(図示略)の操舵角を検出するための操舵角センサ32と、車両のヨーレートを検出するためのヨーレートセンサ33とがさらに電気的に接続されている。また、ブレーキ用ECU15には、踏力検出装置14からブレーキペダル13の踏力に応じた信号(即ち、踏力信号)が入力される。そして、ブレーキ用ECU15は、入力された踏力信号に基づき、運転手が要求する制動力(以下、「要求制動力」ともいう。)に応じた制動力が車両全体に付与されるように各電動ブレーキ装置12のモータ21に対する電流値を設定し、該設定した電流値に基づいた指令を各電動ブレーキ装置12に出力する。
【0028】
なお、要求制動力は、運転手がブレーキペダル13を操作していない場合でも設定される。例えば、自動停止制御及び定速走行制御などのように制動制御を含んだ車両制御時には、要求制動力が「0(零)」よりも大きな値に設定される。
【0029】
ブレーキ用ECU15は、図示しないCPU、ROM及びRAMなどで構築されるデジタルコンピュータを有している。ブレーキ用ECU15のROMには、各種制御処理(例えば、図5及び図6に示す制御処理)、各種マップ(例えば、図2及び図3に示すマップ)及び各種閾値などが予め記憶されている。また、RAMには、車両の図示しないイグニッションスイッチが「オン」である間、適宜書き換えられる各種情報(後述する車体速度など)が一時的に記憶される。
【0030】
ところで、電動ブレーキ装置12のモータ21は、該モータ21に流れる電流に応じて発熱する。そして、発熱量がモータ21からの放熱量よりも多い場合には、モータ21の温度が上昇する。そして、モータ21の温度が予め設定された耐熱温度を超えた状態でモータ21が継続して使用されると、即ちモータ21に電流が流れ続けると、モータ21が故障するおそれがある。そのため、モータ21の温度が耐熱温度に近くなった場合には、温度が耐熱温度以上となる前に、該当するモータ(以下、「過熱モータ」ともいう。)を保護することが好ましい。
【0031】
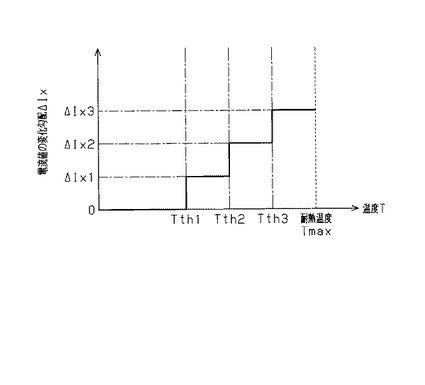
本実施形態では、過熱モータがあると判定された場合に、過熱モータに対する電流値を低下させることにより、過熱モータの温度上昇を抑制するモータ保護制御が行われる。このモータ保護制御時における過熱モータに対する電流値の変化勾配(低下速度)は、図2に示すマップに基づき設定される。
【0032】
また、モータ保護制御が開始されると、過熱モータの駆動によって制動力が付与される第1の車輪(例えば、右前輪)と、車両の幅方向において第1の前輪の反対側に位置する第2の車輪(例えば、左前輪)との間で制動力差(以下、「左右制動力差」ともいう。)が発生する。左右制動力差が大きいと、車両に発生するヨーレートが大きくなり、即ち横滑りしやすい状態となる。つまり、車両の挙動が不安定傾向を示す。そのため、左右制動力差を発生させるようなモータ保護制御は、車両の走行状態が安定していると判定される場合にのみに実行が許可される。そこで、本実施形態では、図3(a)(b)に示すマップを用い、車両の走行状態が安定しているか否かが判定される。
【0033】
次に、図2及び図3(a)(b)に示す各種マップについて説明する。
始めに、図2に示す第1のマップについて説明する。
第1のマップは、過熱モータに対する電流値の変化勾配ΔIxを、その時点の過熱モータの温度Tが低温である場合には高温である場合よりも小さな値に設定するためのマップである。すなわち、図2に示すように、本実施形態では、耐熱温度Tmaxよりも低温に設定された複数(ここでは3つ)の設定閾値Tth1,Tth2,Tth3が予め設定されている。そして、過熱モータの温度Tが、各設定閾値Tth1,Tth2,Tth3のうち最も小さい第1の設定閾値Tth1以上であって且つ第2の設定閾値Tth2(>Tth1)未満である場合、変化勾配ΔIxは、第1の勾配ΔIx1(>0(零))に設定される。また、過熱モータの温度Tが、第2の設定閾値Tth2以上であって且つ第3の設定閾値Tth3(>Tth2)未満である場合、変化勾配ΔIxは、第1の勾配ΔIx1よりも大きな第2の勾配ΔIx2に設定される。そして、過熱モータの温度Tが、第3の設定閾値Tth3以上であって且つ耐熱温度Tmax未満である場合、変化勾配ΔIxは、第2の勾配ΔIx2よりも大きな第3の勾配ΔIx3に設定される。なお、第3の勾配ΔIx3は、従来のモータ保護制御時における過熱モータに対する電流値の変化勾配に近い値である。
【0034】
次に、図3(a)(b)に示す第2のマップについて説明する。
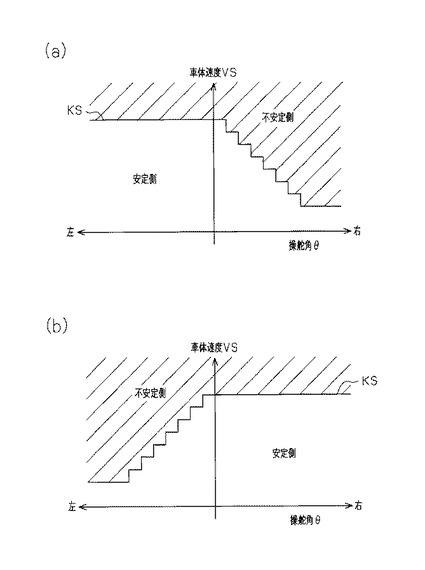
第2のマップは、ステアリングの操舵角θと車両の車体速度VSとに基づき、車両の走行状態が安定しているか否かを判定するためのマップである。具体的には、図3(a)に示す第2のマップは、左前輪FL又は左後輪RLが第1の車輪である場合のマップである一方、図3(b)に示す第2のマップは、右前輪FR又は右後輪RRが第1の車輪である場合のマップである。そして、各第2のマップにおいて、斜線を付した領域が不安定側の領域であると共に、斜線を付していない領域が安定側の領域である。つまり、操舵角θ及び車体速度VSが不安定側の領域に属する場合には、車両の走行状態が安定していないと判定される。一方、操舵角θ及び車体速度VSが安定側の領域に属する場合には、車両の走行状態が安定していると判定される。
【0035】
図3(a)に示すように、車両が左旋回する場合において左前輪FL又は左後輪RLが第1の車輪であるときには、旋回方向外側に位置する右前輪FR又は右後輪RRが第2の車輪になる。この状態でモータ保護制御が行われると、旋回方向内側の車輪に対する制動力は、旋回方向外側の車輪に対する制動力よりも小さくなる。その結果、こうした左右制動力差によって、車両には右旋回させようとするヨーモーメントが発生する。このヨーモーメントは、運転手によるステアリングの操舵に基づき発生するヨーモーメントとは反対方向になり、左右制動力差を発生させても車両のスピン傾向は強くならない。
【0036】
一方、車両が右旋回する場合において左前輪FL又は左後輪RLが第1の車輪であるときには、旋回方向内側に位置する右前輪FR又は右後輪RRが第2の車輪になる。この状態でモータ保護制御が行われると、旋回方向内側の車輪に対する制動力は、旋回方向外側の車輪に対する制動力よりも大きくなる。その結果、こうした左右制動力差によって、車両には右旋回させようとするヨーモーメントが発生する。このヨーモーメントは、運転手によるステアリングの操舵に基づき発生するヨーモーメントと同方向である。そのため、左右制動力差を発生させると、車両のスピン傾向が強くなる。
【0037】
そこで、車両の走行状態が安定しているか否かの判断基準である車速判定値KSは、左前輪FL又は左後輪RLが第1の車輪である場合において車両が左旋回するときには、ステアリングの操舵角θの絶対値が大きくなっても比較的大きな値で一定となっている。一方、車速判定値KSは、左前輪FL又は左後輪RLが第1の車輪である場合において車両が右旋回するときには、ステアリングの操舵角θの絶対値が大きくなるほど小さな値に設定される。その結果、左前輪FL又は左後輪RLに対応するモータ21が過熱モータである際には、車両が左旋回する場合のほうが右旋回する場合よりも、モータ保護制御の実行機会が多くなる。
【0038】
図3(b)に示すように、車両が右旋回する場合において右前輪FR又は右後輪RRが第1の車輪であるときには、旋回方向外側に位置する左前輪FL又は左後輪RLが第2の車輪になる。この状態でモータ保護制御が行われると、旋回方向内側の車輪に対する制動力は、旋回方向外側の車輪に対する制動力よりも小さくなる。その結果、こうした左右制動力差によって、車両には左旋回させようとするヨーモーメントが発生する。このヨーモーメントは、運転手によるステアリングの操舵に基づき発生するヨーモーメントとは反対方向になる。そのため、左右制動力差を発生させても車両のスピン傾向は強くならない。
【0039】
一方、車両が左旋回する場合において右前輪FR又は右後輪RRが第1の車輪であるときには、旋回方向内側に位置する左前輪FL又は左後輪RLが第2の車輪になる。この状態でモータ保護制御が行われると、旋回方向内側の車輪に対する制動力は、旋回方向外側の車輪に対する制動力よりも大きくなる。その結果、こうした左右制動力差によって、車両には左旋回させようとするヨーモーメントが発生する。このヨーモーメントは、運転手によるステアリングの操舵に基づき発生するヨーモーメントと同方向になる。そのため、左右制動力差を発生させると、車両のスピン傾向が強くなる。
【0040】
そこで、車速判定値KSは、右前輪FR又は右後輪RRが第1の車輪である場合において車両が右旋回するときには、ステアリングの操舵角θの絶対値が大きくなっても比較的大きな値で一定となっている。一方、車速判定値KSは、右前輪FR又は右後輪RRが第1の車輪である場合において車両が左旋回するときには、ステアリングの操舵角θの絶対値が大きくなるほど小さな値に設定される。その結果、右前輪FR又は右後輪RRに対応するモータ21が過熱モータである際には、車両が右旋回する場合のほうが左旋回する場合よりも、モータ保護制御の実行機会が多くなる。
【0041】
したがって、本実施形態では、車両の車体速度VSが、車両の走行状態の安定度合を数値化した安定度相当値に相当する。また、車速判定値KSが、走行状態が安定しているか否かの判断基準である安定基準値に相当する。
【0042】
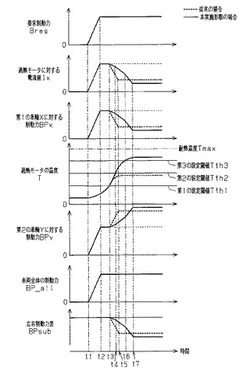
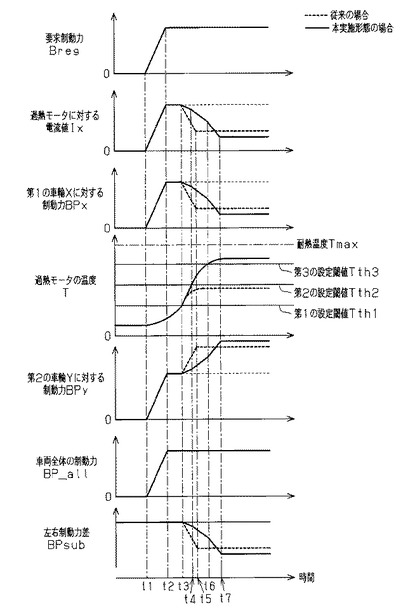
次に、4つのモータ21のうち何れか一つのモータが過熱モータである場合の作用について、図4に示すタイミングチャートを参照して説明する。なお、図4で示す破線は、従来の方法で過熱モータを保護する場合を示したものである。また、各車輪FR,FL,RR,RLのうち何れか一つの車輪が過熱モータになっても、車両の走行状態は安定しているものとする。
【0043】
さて、図4のタイミングチャートに示すように、運転手によるブレーキペダル13の操作などによって要求制動力Breqが「0(零)」から徐々に大きくなる第1のタイミングt1以降では、車両全体の制動力BP_allは、要求制動力Breqに近づくように増大される。このとき、各電動ブレーキ装置12のモータ21に対する電流値は、要求制動力Breqに応じて次第に大きくなる。すると、各車輪FR,FL,RR,RLには、対応するモータ21に対する電流値に応じた制動力がそれぞれ付与される。
【0044】
そして、運転手によるブレーキペダル13の踏力が一定になる第2のタイミングt2以降では、要求制動力Breqが一定となる。すると、各車輪FR,FL,RR,RLに対する制動力を保持するため、各モータ21に対する電流値もまた一定とされる。その後の第3のタイミングt3で、各モータ21のうち何れか一つのモータ21(例えば、右前輪FR用のモータ21)の温度Tが第1の設定閾値Tth1以上になると、該当するモータ21が過熱モータとされる。なお、この時点では、過熱モータ以外の他のモータ21の温度Tは、第1の設定閾値Tth1よりも十分に低い値である。
【0045】
すると、過熱モータを保護するためのモータ保護制御、及びモータ保護制御の実行に伴う車両全体の制動力BP_allの低下を抑制するための調整制御が開始される。ここでは、まず始めに、従来のモータ保護制御及び調整制御について説明する。
【0046】
すなわち、図4にて破線で示すように、従来のモータ保護制御では、過熱モータの保護が最優先され、過熱モータに対する電流値Ixが急激に低下される。このときの電流値Ixの変化勾配は、上記第3の勾配ΔIx3又は該第3の勾配ΔIx3に近い値である。すると、過熱モータに対する電流値Ixの急激な低下に伴って、第1の車輪Xに対する制動力BPxが急激に減少される。その結果、電流値Ixが低くなる分、過熱モータでの発熱量が少なくなり、過熱モータの温度Tの温度上昇速度が遅くなる。そして、過熱モータの温度上昇速度が予め設定された規定速度以下になる第5のタイミングt5では、過熱モータの温度が耐熱温度Tmaxを超える可能性が低くなったと判断される。すると、過熱モータに対する電流値Ixの低下が停止される。そのため、第5のタイミングt5以降では、過熱モータの温度Tは、第5のタイミングt5直前の温度又は該温度に近い値で保持される。
【0047】
こうしたモータ保護制御が行われると、第1の車輪Xに対する制動力BPxが減少される。また、モータ保護制御が開始されると、車両の幅方向において第1の車輪Xの反対側に位置する第2の車輪Yに対する制動力BPyを増大させる調整制御が開始される。このときの制動力BPyの増大量は、第1の車輪Xに対する制動力BPxの減少量と同程度である。このように第2の車輪Yに対する制動力BPyを調整することにより、車両全体の制動力BP_allの低下が抑制される。
【0048】
しかし、従来のモータ保護制御では、第1の車輪Xに対する制動力BPxが急激に減少される。そのため、調整制御では、第1の車輪Xに対する制動力BPxの急激な減少に対応させるべく、第2の車輪Yに対する制動力BPyが急激に増大される。その結果、第1の車輪Xと第2の車輪Yとの左右制動力差BPsubが急増する。つまり、左右制動力差BPsubが急増する分、車両の挙動が急激に変化する。
【0049】
この点、本実施形態の方法では、各モータ21のうち何れか一つが過熱モータとなったとしても、車両の挙動の急激な変化が抑制される。すなわち、過熱モータに対する電流値Ixの変化勾配は、図2に示す第1のマップを用い、その時点の過熱モータの温度Tが低温である場合には高温である場合よりも緩勾配に設定される。
【0050】
そのため、第3のタイミングt3以降では、従来のモータ保護制御が行われる場合と比較して過熱モータの温度Tが比較的低温である分、電流値Ixは緩やかに低下される。その結果、従来のモータ保護制御が行われる場合と比較して、第1の車輪Xに対する制動力BPxが緩やかに減少される。また、モータ保護制御と同時に開始される調整制御では、第1の車輪Xに対する制動力BPxの減少速度が低速である分、第2の車輪Yに対する制動力BPyは緩やかに増大される。つまり、過熱モータの検出直後においては、左右制動力差BPsubが緩やかに大きくなるため、車両の挙動は緩やかに不安定側に変化する。
【0051】
このように過熱モータに対する電流値Ixを緩やかに低下させる場合には、過熱モータの温度上昇が継続されることがある。そして、過熱モータの温度Tが第2の設定閾値Tth2以上になる第4のタイミングt4では、過熱モータに対する電流値Ixの変化勾配ΔIxが、第1の勾配ΔIx1から第2の勾配ΔIx2に変更される。すると、第4のタイミングt4以降では、第4のタイミングt4以前と比較して変化勾配ΔIxが大きくなる分、第1の車輪Xに対する制動力BPxの減少勾配が大きくなる。そのため、第2の車輪Yに対する制動力BPyの増大勾配は、第4のタイミングt4以前よりも急勾配となる。しかし、第2の勾配ΔIx2が、電流値Ixの従来の変化勾配よりも小さい値であるため、第4のタイミングt4以降での左右制動力差BPsubの変化量は、従来の場合と比較して少ない。そのため、過熱モータの温度Tが第3の設定閾値Tth3未満である場合には、従来の場合と比較して、車両の挙動は緩やかに不安定側に変化する。
【0052】
上記のように電流値Ixの変化勾配ΔIxを大きくして過熱モータでの発熱量を少なくしても、発熱量のほうが放熱量よりも多いと、過熱モータの温度上昇は継続される。そして、過熱モータの温度Tが第3の設定閾値Tth3以上になる第6のタイミングt6では、過熱モータに対する電流値Ixの変化勾配ΔIxが、第2の勾配ΔIx2から第3の勾配ΔIx3に変更される。つまり、過熱モータの温度Tが第3の設定閾値Tth3以上になると、過熱モータの保護が最優先される。すると、第6のタイミングt6以降では、第1の車輪Xに対する制動力BPxの減少勾配、及び第2の車輪Yに対する制動力BPyの増大勾配は、従来の場合と同程度となる。
【0053】
その結果、左右制動力差BPsubの変化量は従来の場合と同程度となるものの、過熱モータの温度上昇は抑制される。そして、過熱モータの温度上昇が極めて少なくなる第7のタイミングt7で、過熱モータに対する電流値Ixが保持される。
【0054】
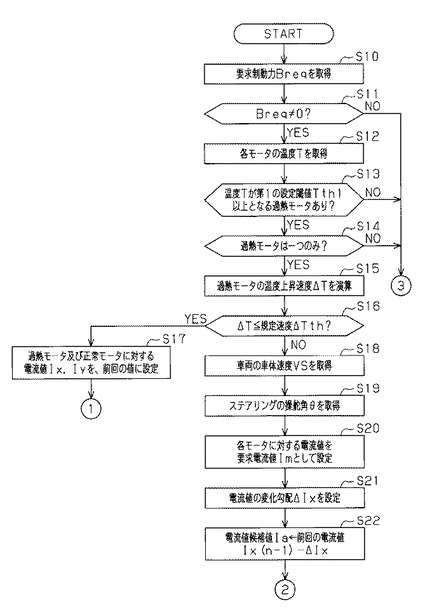
次に、上記モータ保護制御及び調整制御を行う際にブレーキ用ECU15が実行する電流値補正処理ルーチンについて、図5及び図6に示すフローチャートを参照して説明する。
【0055】
さて、電流値補正処理ルーチンは、予め設定された所定周期毎(例えば、0.01秒毎)に実行される処理ルーチンである。この電流値補正処理ルーチンにおいて、ブレーキ用ECU15は、要求制動力Breqを取得し(ステップS10)、該取得した要求制動力Breqが「0(零)」ではないか否かを判定する(ステップS11)。要求制動力Breqが「0(零)」である場合(ステップS11:NO)、ブレーキ用ECU15は、各車輪FR,FL,RR,RLに制動力を付与していないため、電流値補正処理ルーチンを一旦終了する。一方、要求制動力Breqが「0(零)」ではない場合(ステップS11:YES)、ブレーキ用ECU15は、各電動ブレーキ装置12a〜12dの温度センサ23からの検出信号に基づき、各モータ21の温度Tを取得(演算)する(ステップS12)。したがって、本実施形態では、ブレーキ用ECU15が、温度取得手段として機能する。
【0056】
続いて、ブレーキ用ECU15は、取得した温度Tが第1の設定閾値Tth1以上となるモータ、即ち過熱モータがあるか否かを判定する(ステップS13)。本実施形態では、第1の設定閾値Tth1が、モータ21が過熱傾向(即ち、耐熱温度Tmaxに近づく傾向)にあるか否かの判断基準である温度基準値に相当する。したがって、本実施形態では、ブレーキ用ECU15が、各モータ21の中に過熱モータがあるか否かを判定する判定手段としても機能する。
【0057】
過熱モータがない場合(ステップS13:NO)、ブレーキ用ECU15は、全てのモータ21の温度Tが第1の設定閾値Tth1未満であるため、電流値補正処理ルーチンを一旦終了する。一方、過熱モータがある場合(ステップS13:YES)、ブレーキ用ECU15は、過熱モータは一つのみであるか否かを判定する(ステップS14)。過熱モータが複数ある場合(ステップS14:NO)、ブレーキ用ECU15は、電流値補正処理ルーチンを一旦終了する。一方、過熱モータが一つのみである場合(ステップS14:YES)、ブレーキ用ECU15は、過熱モータの温度Tの単位時間あたりの変化量を、過熱モータの温度上昇速度ΔTとして演算する(ステップS15)。そして、ブレーキ用ECU15は、演算した温度上昇速度ΔTが、過熱モータの温度上昇がほとんど見られなくなったと判断するための判断基準として設定された規定速度ΔTth以下であるか否かを判定する(ステップS16)。
【0058】
温度上昇速度ΔTが規定速度ΔTthを超える場合(ステップS16:NO)、ブレーキ用ECU15は、過熱モータの温度上昇が継続中であると判断し、その処理を後述するステップS18に移行する。一方、温度上昇速度ΔTが規定速度ΔTth以下である場合(ステップS16:YES)、ブレーキ用ECU15は、過熱モータの温度上昇がほとんど見られなくなったと判断し、その処理を次のステップS17に移行する。
【0059】
ステップS17において、ブレーキ用ECU15は、過熱モータに対する電流値Ix、及び第2の車輪Yに対応する電動ブレーキ装置12に搭載されるモータ(以下、「正常モータ」ともいう。)に対する電流値Iyを、前回の電流値補正処理ルーチンの実行時に設定された値に設定する。そして、ブレーキ用ECUは、その処理を後述するステップS27に移行する。
【0060】
ステップS18において、ブレーキ用ECU15は、各車輪速度センサ31a〜31dからの検出信号に基づき、車両の車体速度VSを取得する。続いて、ブレーキ用ECU15は、操舵角センサ32からの検出信号に基づき、ステアリングの操舵角θを取得する(ステップS19)。本実施形態では、車体速度VSは、車両の走行状態が安定しているか否かを判断するためのパラメータであり、安定度相当値に該当する。また、操舵角θは、安定基準値である車速判定値KSの大きさを設定するためのパラメータである(図3参照)。したがって、本実施形態では、ブレーキ用ECU15が、安定度取得手段としても機能する。
【0061】
そして、ブレーキ用ECU15は、各モータ21に対する電流値を要求電流値Imとして設定する(ステップS20)。この要求電流値Imは、ステップS10で取得された要求制動力Breqに応じた電流値である。続いて、ブレーキ用ECU15は、過熱モータに対する電流値Ixの変化勾配ΔIxを、図2に示す第1のマップを用いて設定する(ステップS21)。その結果、変化勾配ΔIxは、その時点の過熱モータの温度が低温である場合には高温である場合よりも緩勾配に設定される。
【0062】
そして、ブレーキ用ECU15は、過熱モータに対する電流値の候補として、電流値候補値Iaを設定する(ステップS22)。具体的には、ブレーキ用ECU15は、前回の電流値補正処理ルーチンの実行時に設定された過熱モータに対する電流値IxをRAMから読み出し、該電流値を前回の電流値Ix(n−1)とする。なお、「n」は、車両の図示しないイグニッションスイッチがオンになってからの電流値補正処理ルーチンの実行回数である。そして、ブレーキ用ECU15は、前回の電流値Ix(n−1)から、ステップS18で設定した変化勾配ΔIxを減算し、該演算結果を電流値候補値Ia(=Ix(n−1)−ΔIx)とする。
【0063】
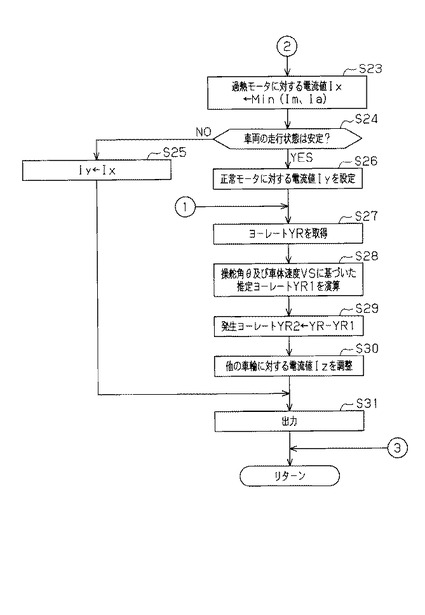
続いて、ブレーキ用ECU15は、ステップS20で設定した過熱モータに対する要求電流値Imと、ステップS22で演算した電流値候補値Iaとの比較結果に基づき、過熱モータに対する今回の電流値Ixを設定する(ステップS23)。本実施形態では、ブレーキ用ECU15は、要求電流値Im及び電流値候補値Iaのうち小さい方の値を、過熱モータに対する今回の電流値Ixとする。
【0064】
そして、ブレーキ用ECU15は、図3(a)(b)に示す第2のマップを用い、車両の走行状態が安定しているか否かを判定する(ステップS24)。具体的には、ブレーキ用ECU15は、過熱モータに対応する第1の車輪Xが左前輪FL又は左後輪RLである場合には図3(a)に示す第2のマップを選択し、過熱モータに対応する第1の車輪Xが右前輪FR又は右後輪RRである場合には図3(b)に示す第2のマップを選択する。そして、ブレーキ用ECU15は、ステップS19で取得した操舵角θに基づいた車速判定値KSを、選択した第2のマップに基づき設定する。続いて、ブレーキ用ECU15は、ステップS18で取得した車体速度VSが、設定した車速判定値KS未満であるか否かを判定する。
【0065】
車体速度VSが車速判定値KS未満である場合(ステップS24:YES)、ブレーキ用ECU15は、車両の走行状態が安定していると判定し、その処理を後述するステップS26に移行する。一方、車体速度VSが車速判定値KS以上である場合(ステップS24:NO)、ブレーキ用ECU15は、車両の走行状態が安定していないと判定し、その処理を次のステップS25に移行する。
【0066】
ステップS25において、ブレーキ用ECU15は、第2の車輪Yに対応する正常モータに対する電流値Iyを、過熱モータに対する電流値Ixと同一値にする。そして、ブレーキ用ECU15は、その処理を後述するステップS31に移行する。この場合、第2の車輪Yに対する制動力BPyは、第1の車輪Xに対する制動力BPxと同程度となる。そのため、左右制動力差BPsubはほとんど発生しないため、車両全体の制動力BP_allは減少されるものの、過熱モータを保護する際に車両の挙動が不安定になることが抑制される。
【0067】
ステップS26において、ブレーキ用ECU15は、過熱モータに対する電流値Ixの低下に起因した車両全体の制動力BP_allの減少分を補うように、正常モータに対する電流値Iyを設定する。例えば、ブレーキ用ECU15は、ステップS23で設定した電流値Ixと前回の電流値Ix(n−1)との差分を演算する。そして、ブレーキ用ECU15は、前回の電流値補正処理ルーチンの実行時に設定された正常モータに対する電流値に対して上記差分を加算し、該加算結果を正常モータに対する電流値Iyとする。その後、ブレーキ用ECU15は、その処理を次のステップS27に移行する。
【0068】
ステップS27において、ブレーキ用ECU15は、ヨーレートセンサ33からの検出信号に基づき、車両のヨーレートYRを取得する。このヨーレートYRは、運転手によるステアリング操作及びアクセル操作に基づいたヨーモーメントと、モータ保護制御及び調整制御に基づいたヨーモーメントとを含んだ値である。続いて、ブレーキ用ECU15は、ステップS18,S19で取得した車体速度VS及び操舵角θに基づいた推定ヨーレートYR1を、以下に示す関係式(式1)を用いて演算する(ステップS28)。ここで演算される推定ヨーレートYR1は、運転手によるステアリング操作及びアクセル操作に基づき車両に発生するヨーモーメントに応じた値である。つまり、左右制動力差BPsubが発生していない場合、推定ヨーレートYR1は、ヨーレートYRとほぼ一致する。
【0069】
【数1】

ただし、L…ホイールベース長(前輪と後輪との間の距離)、A…スタビリティファクタ(定数)
そして、ブレーキ用ECU15は、ステップS27で取得したヨーレートYRからステップS28で演算した推定ヨーレートYR1を減算し、該減算結果を発生ヨーレート(ヨーレートの推定値)YR2とする(ステップS29)。この発生ヨーレートYR2は、モータ保護制御及び調整制御の実行によって車両に発生し得るヨーモーメントに応じた値である。したがって、本実施形態では、ブレーキ用ECU15が、ヨーレート取得手段としても機能する。
【0070】
続いて、ブレーキ用ECU15は、ステップS29で演算した発生ヨーレートYR2を「0(零)」に近づけるように、各車輪FR,FL,RR,RLのうち第1及び第2の各車輪以外の他の車輪に対応する各電動ブレーキ装置12のモータ21に対する電流値Izを調整する(ステップS30)。例えば、右前輪FR(又は左前輪FL)が第1の車輪Xであると共に左前輪FL(又は右前輪FR)が第2の車輪Yである場合、後輪RR,RLが他の車輪に相当する。そして、第1の車輪Xである右前輪FRに対する制動力BPxが減少されると共に、第2の車輪Yである左前輪FLに対する制動力BPyが増大されると、ブレーキ用ECU15は、右方向へのヨーモーメントを解消させるために、左後輪RLに対する制動力のほうが右後輪RRに対する制動力よりも大きくなるように、各モータ21に対する電流値Izを調整する。
【0071】
一方、右後輪RR(又は左後輪RL)が第1の車輪Xであると共に左後輪RL(又は右後輪RR)が第2の車輪Yである場合、前輪FR,FLが他の車輪に相当する。そして、ブレーキ用ECU15は、その処理を次のステップS31に移行する。
【0072】
ステップS31において、ブレーキ用ECU15は、設定した各モータ21に対する電流値に対応する指令を、各電動ブレーキ装置12a〜12dに出力する。すると、各電動ブレーキ装置12a〜12dのモータ21に対する電流値は、入力された指令に基づいた電流値となる。そして、各車輪FR,FL,RR,RLには、モータ21に対する電流値に応じた制動力がそれぞれ付与される。したがって、本実施形態では、ブレーキ用ECU15が、モータ制御手段としても機能する。その後、ブレーキ用ECU15は、電流値補正処理ルーチンを一旦終了する。
【0073】
以上説明したように、本実施形態では、以下に示す効果を得ることができる。
(1)各モータ21のうち何れか一つのモータが過熱モータである場合、該過熱モータの保護を図るために、過熱モータに対する電流値Ixが低下される。このとき、過熱モータに対する電流値Ixは、過熱モータの温度Tが低温である場合には高温である場合よりも緩やかな勾配で低下される。そのため、過熱モータの温度Tとは関係なく電流値Ixを急勾配で低下させる従来の場合と比較して、モータ保護制御の開始直後においては、第1の車輪Xと第2の車輪Yとの左右制動力差BPsubの急増を抑制することができる。
【0074】
(2)こうしたモータ保護制御が開始されても、過熱モータの温度Tの上昇が継続される場合には、過熱モータの電流値Ixの変化勾配ΔIxが大きな値に変更される。つまり、1つのモータの温度Tが第1の設定閾値Tth1以上になっても、当該モータの温度Tが比較的低い場合には、車両の挙動の急変の抑制が優先的に行われる。しかし、過熱モータの温度Tが高温になると、該過熱モータの保護が優先的に行われる。したがって、過熱モータの温度Tが耐熱温度Tmax以上になることを抑制でき、ひいては過熱モータを適切に保護することができる。
【0075】
(3)モータ保護制御が行われる場合には、第2の車輪Yに対する制動力BPyを増大させる調整制御が行われる。このように調整制御がモータ保護制御と共に行われる場合であっても、従来の場合と比較して第1の車輪Xに対する制動力BPxの減少速度が低速である分、第1の車輪Xと第2の車輪Yとの左右制動力差BPsubは緩やかに増加する。つまり、モータ保護制御及び調整制御の実行に伴う車両の挙動の急変を抑制することができる。
【0076】
(4)そして、モータ保護制御と共に調整制御が行われることにより、第1の車輪Xに対する制動力BPxの減少分を、第2の車輪Yに対する制動力BPyを増大させることにより、車両全体の制動力BP_allの減少を抑制することができる。そのため、モータ保護制御及び調整制御の実行に伴う車両全体の制動力BP_allの変動が抑制される分、モータ保護制御及び調整制御の実行に伴う違和感を、車両の運転手に感じさせにくくすることができる。
【0077】
(5)変化勾配ΔIxを過熱モータの温度Tに応じて変更する制御構成にしたことにより、モータ保護制御及び調整制御の開始時においては、車両の挙動が緩やかに変化する。そのため、車両の運転手は、モータ保護制御及び調整制御の実行に伴う車両の挙動変化を解消させるための車両操作を、落ち着いて行うことが可能となる。つまり、モータ保護制御及び調整制御に伴う車両挙動の変化を補正するために運転手に要求される車両操作を容易なものとすることができる。
【0078】
(6)また、従来の場合と比較して、モータ保護制御及び調整制御の開始直後における車両の挙動の急変を抑制できる分、車両の走行状態が安定しているか否かの判定基準(本実施形態では、車速判定値KS)を弛めに設定することができる。その結果、モータ保護制御を実行する機会を、従来の場合と比較して多くすることができる。
【0079】
(7)さらに、本実施形態では、モータ保護制御及び調整制御の実行時においては、該各制御の実行によって発生したヨーモーメントを打ち消すように、第1及び第2の車輪X,Y以外の他の車輪に対する制動力が調整される。そのため、モータ保護制御及び調整制御の実行に伴う車両挙動の不安定化を抑制できる。つまり、他の車輪に対する制動力調整を行わない場合と比較して、車両の走行状態が安定しているか否かの判定基準を、さらに弛めに設定することができる。その結果、モータ保護制御を実行する機会を、さらに多くすることができる。
【0080】
(8)また、モータ保護制御の実行によって第1の車輪Xの温度上昇速度ΔTが規定速度ΔTth以下になった場合には、過熱モータでの発熱量と過熱モータからの放熱量とがほぼ釣り合ったと判断される。その結果、モータ保護制御の実行による過熱モータに対する電流値Ixの低下が停止される。そのため、温度上昇速度ΔTが規定速度ΔTth以下になっても電流値Ixの低下が継続される場合と比較して、モータ保護制御及び調整制御の実行に伴う左右制動力差BPsubの増大を抑制することができる。
【0081】
(9)運転手によるブレーキペダル13の踏力が弱くなるなどして要求制動力Breqが減少される場合においては、ステップS20で設定される過熱モータに対応する要求電流値Imのほうが、ステップS22で演算される電流値候補値Iaよりも小さくなることがある。この場合、本実施形態では、過熱モータに対する電流値Ixは、要求電流値Imに設定される。そのため、要求制動力Breqの減少に応じて、車両全体の制動力BP_allを適切に減少させることができる。
【0082】
なお、実施形態は以下のような別の実施形態に変更してもよい。
・実施形態において、車両の右旋回時において第1の車輪Xが旋回方向内側の車輪(右前輪FR,右後輪RR)である場合、モータ保護制御及び調整制御の実行によって発生したヨーモーメント(即ち、発生ヨーレートYR2)を打ち消すような制動制御を行わなくてもよい、即ちステップS27〜S30の各処理を行わなくてもよい。同様に、車両の左旋回時において第1の車輪Xが旋回方向内側の車輪(左前輪FL,左後輪RL)である場合、モータ保護制御及び調整制御の実行によって発生したヨーモーメント(即ち、発生ヨーレートYR2)を打ち消すような制動制御を行わなくてもよい、即ちステップS27〜S30の各処理を行わなくてもよい。
【0083】
・実施形態において、ステップS27〜S30の各処理を省略してもよい。このように構成しても、モータ保護制御を実行する機会を、ステップS27〜S30の各処理を行う場合よりは少なくなるものの、従来の場合よりも多くすることができる。
【0084】
・実施形態において、調整制御は、第1の車輪X以外の他の全ての車輪(第2の車輪Yも含む。)に対する制動力を調整することにより、車両全体の制動力BP_allの減少を抑制する制御であってもよい。
【0085】
・実施形態において、モータ保護制御の実行時での第2の車輪Yに対する制動力BPyの増大量は、第1の車輪Xに対する制動力BPxの減少量と対応していなくてもよい。
・実施形態において、モータ保護制御の実行時に、調整制御を行わなくてもよい。
【0086】
・実施形態において、モータ保護制御を、過熱モータに対応する第1の車輪Xが前輪FR,FLである場合に行ってもよい。
逆に、モータ保護制御を、過熱モータに対応する第1の車輪Xが後輪RR,RLである場合に行ってもよい。
【0087】
・実施形態において、電流値Ixの変化勾配ΔIxを、過熱モータの温度Tが高温になるに連れて次第に大きくなるように設定してもよい。この場合、変化勾配ΔIxを、過熱モータの温度Tをパラメータとした一次関数又は二次関数に基づき設定してもよい。
【0088】
・実施形態において、モータ21の温度は、モータ21に対する電流値の大きさ、及び通電時間などをパラメータとして演算した推定値であってもよい。
・実施形態において、車両の走行状態が安定しているか否かを、車両のヨーレートYRを用いて判断してもよい。例えば、ヨーレートYRがヨーレート判定値未満である場合に、車両の走行状態が安定していると判定してもよい。この場合、ヨーレート判定値は、車両の車体速度VSが高速である場合ほど小さな値に設定してもよい。このような制御構成においては、ヨーレートYRが、車両の走行状態の安定度合を数値化した安定度相当値に該当し、ヨーレート判定値が、走行状態が安定しているか否かの判断基準である安定基準値に該当する。
【0089】
・実施形態において、車両の右旋回時において第1の車輪Xが旋回方向内側の車輪(右前輪FR,右後輪RR)である場合、ステップS24の判定処理を行うことなく、モータ保護制御及び調整制御を行ってもよい。同様に、車両の左旋回時において第1の車輪Xが旋回方向内側の車輪(左前輪FL,左後輪RL)である場合、ステップS24の判定処理を行うことなく、モータ保護制御及び調整制御を行ってもよい。この場合、モータ保護制御及び調整制御の実行によって発生したヨーモーメントは、運転手によるステアリング操作によって発生するヨーモーメントとは反対方向のモーメントである。そのため、モータ保護制御及び調整制御を行っても、車両の挙動が不安定になることがあまりない。
【0090】
次に、上記実施形態及び別の実施形態から把握できる技術的思想を以下に追記する。
(イ)前記モータ制御手段(15、S23,S31)は、前記調整制御を行う場合、前記モータ保護制御の実行による車両全体の制動力の減少分を補うように前記第2の車輪(Y)を含む前記第1の車輪(X)以外の全ての車輪に対する制動力を増大させるべく、前記第1の車輪(X)以外の全ての車輪に対応する電動ブレーキ装置(12,12a,12b,12c,12d)に搭載されるモータ(12)に対する電流値をそれぞれ調整することを特徴とする車両の制動制御装置。
【0091】
(ロ)車両の走行状態の安定度合を数値化した安定度相当値(VS、YR)を取得する安定度取得手段(15、S18)をさらに備え、
前記モータ制御手段(15、S23,S31)は、前記安定度取得手段(15、S18)によって取得された安定度相当値(VS、YR)が、車両の走行状態が安定しているか否かの判断基準である安定基準値(KS)以下である場合に、前記モータ保護制御の実行を許可することを特徴とする車両の制動制御装置。
【符号の説明】
【0092】
12,12a〜12d…電動ブレーキ装置、15…制動制御装置としてのブレーキ用ECU(温度取得手段、判定手段、モータ制御手段、ヨーレート取得手段、安定度取得手段)、21…モータ、FR,FL,RR,RL…車輪、KS…安定基準値の一例としての車速判定値、Ix…過熱モータに対する電流値、Iy…正常モータに対する電流値、T…温度、Tth1…温度基準値としての第1の設定閾値、VS…安定度相当値の一例としての車体速度、X…第1の車輪、Y…第2の車輪、YR…安定度相当値の一例としてのヨーレート、YR2…ヨーレートの推定値としての発生ヨーレート。
【技術分野】
【0001】
本発明は、複数の車輪に個別対応する複数の電動ブレーキ装置を制御する車両の制動制御装置に関する。
【背景技術】
【0002】
従来、車両に搭載される制動システムとして、複数の車輪に個別対応する複数の電動ブレーキ装置と、各電動ブレーキ装置を制御する制動制御装置とを備えたシステムの開発が進められている(特許文献1参照)。こうしたシステムを構成する電動ブレーキ装置は、制動制御装置からの指令に基づき駆動するモータを備え、モータに対する電流値に応じた制動力を車輪に付与するようになっている。
【0003】
電動ブレーキ装置に設けられるモータは、その温度が予め設定された耐熱温度以上になっても継続して使用され続けると、異常をきたすおそれがある。そして、上記制動システムでは、各モータの中に異常モータがある場合には、該異常モータを保護するためのモータ保護制御が行われる。このモータ保護制御では、異常モータに対する電流値が急激に低下されると共に、車両の幅方向において異常モータに対応する第1の車輪(例えば、右前輪)の反対側に位置する第2の車輪(例えば、左前輪)に対応するモータ(以下、「正常モータ」ともいう。)が作動される。これにより、第1の車輪に対する制動力が減少しても第2の車輪に対する制動力が減少されない。そのため、車両全体の制動力の減少が低下されると共に、異常モータが良好に保護される。
【0004】
ただし、上記モータ保護制御が開始されると、第1の車輪と第2の車輪との間に制動力差(以下、「左右制動力差」ともいう。)が発生する。その結果、車両のヨーモーメントが大きくなり、車両の挙動が不安定化するおそれがある。そのため、上記制動システムでは、車両の走行状態が安定している場合において異常モータがあるときに、モータ保護制御が行われる。ここでいう「車両の走行状態が安定しているか否か」としては、例えば、「車両の横滑りが発生しにくい状態であるか否か」が挙げられる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−158336号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述したように、温度が耐熱温度を超えてもモータが使用され続けると、モータが故障するおそれがある。モータ保護の観点から考えると、モータが故障する前に、当該モータを保護することが好ましい。そこで、近年では、以下に示す制動システムが考案されている。
【0007】
すなわち、各モータの温度が定期的に取得され、温度が耐熱温度未満の値に設定された温度基準値以上となる過熱モータがあるか否かが判定される。そして、各モータのうち何れか一つのモータが過熱モータであると判定された場合には、過熱モータに対する電流値を急激に低下させると共に、正常モータの作動を継続させるモータ保護制御が行われる。こうした制御が行われることにより、過熱モータの温度上昇が抑制され、過熱モータの温度が耐熱温度以上になる事態が回避される。
【0008】
しかしながら、この場合であっても、モータ保護制御によって、過熱モータに対応する第1の車輪と正常モータに対応する第2の車輪との間に左右制動力差が発生する。この左右制動力差が大きいほど、車両のヨーモーメントが大きくなり、車両挙動が不安定化しやすい。そのため、モータ保護制御に起因して車両がスピンする事態を回避するためには、「車両の走行状態が安定しているか否か」の判断基準を厳しめに設定する必要がある。つまり、モータ保護制御の実行機会が限られてしまう。
【0009】
本発明は、このような事情に鑑みてなされたものである。その目的は、各モータのうち何れか一つのモータが過熱モータになった場合に、該過熱モータを保護するためのモータ保護制御の実行機会を増やすことができると共に、該モータ保護制御に伴う車両挙動の変化を補正するための車両操作を容易なものとすることができる車両の制動制御装置を提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明は、車両に設けられた複数の車輪(FR,FL,RR,RL)に個別対応すると共に、モータ(21)を有する複数の電動ブレーキ装置(12,12a,12b,12c,12d)を制御する車両の制動制御装置であって、前記電動ブレーキ装置(12,12a,12b,12c,12d)は、前記モータ(21)に対する電流値に応じた制動力を、対応する車輪(FR,FL,RR,RL)に付与する構成となっており、前記各モータ(21)の温度(T)を取得する温度取得手段(15、S12)と、取得された温度(T)が過熱傾向であるか否かの判断基準として設定された温度基準値(Tth1)以上となる過熱モータが、前記各モータ(21)の中にあるか否かを判定する判定手段(15、S13)と、前記各モータ(21)のうち何れか一つのモータが前記過熱モータであると判定された場合に、該過熱モータに対する電流値(Ix)を、前記過熱モータの温度(T)が低温である場合には高温である場合よりも緩やかな勾配で低下させるモータ保護制御を行うモータ制御手段(15、S23,S31)と、を備えることを要旨とする。
【0011】
上記構成によれば、各モータのうち何れか一つのモータが過熱モータである場合、該過熱モータの保護を図るために、過熱モータに対する電流値が低下される。過熱モータがあると判定された時点では過熱モータの温度が比較的低いため、過熱モータに対する電流値が緩やかに低下される。そのため、過熱モータの温度が比較的低温である場合には、モータ保護制御の実行に伴う第1の車輪と第2の車輪との制動力差の急増が抑制される。第1の車輪とは、過熱モータの駆動によって制動力が付与される車輪のことであり、第2の車輪とは、車両の幅方向において第1の車輪の反対側に位置する車輪のことである。つまり、モータ保護制御の開始時においては、モータの温度とは関係なく過熱モータに対する電流値を急激に低下させる従来の場合と比較して、モータ保護制御時に車両の挙動が不安定になりにくくなる。
【0012】
その結果、本発明のモータ保護制御が開始されると、車両の挙動が緩やかに変化する。しかし、挙動の変化は従来の場合と比較して緩やかであるため、車両の運転手は、上記モータ保護制御の開始に伴う車両の挙動変化を解消させるための車両操作を、落ち着いて行うことが可能となる。したがって、過熱モータの温度の高低に関係なく過熱モータに対する電流値を急激に低下させる従来の場合と比較して、モータ保護制御の実行機会を増やすことができると共に、該モータ保護制御に伴う車両挙動の変化を補正するための車両操作を容易なものとすることができる。
【0013】
その一方で、モータ保護制御を行っても過熱モータの温度上昇が継続し、該過熱モータの温度が比較的高温になると、過熱モータに対する電流値は、過熱モータの温度が低温である場合よりも急勾配で低下される。そのため、過熱モータが好適に保護される。
【0014】
本発明の車両の制動制御装置において、前記モータ制御手段(15、S23,S31)は、前記モータ保護制御を行う場合に、搭載するモータ(21)が前記過熱モータとなった電動ブレーキ装置(12,12a,12b,12c,12d)によって制動力が付与される第1の車輪(X)とは車両の幅方向において反対側に位置する第2の車輪(Y)に制動力を付与するための電動ブレーキ装置(12,12a,12b,12c,12d)に搭載される正常モータに対する電流値(Iy)を上昇させる調整制御を行うことが好ましい。
【0015】
上記構成によれば、モータ保護制御が行われる場合には、第2の車輪に対応する電動ブレーキ装置に搭載される正常モータに対する電流値を上昇させることにより、第2の車輪に対する制動力が増大される。このように第1の車輪に対する制動力を減少させる際に第2の車輪に対する制動力を増大させても、上記従来の場合と比較して、第1の車輪に対する制動力の減少速度が低速である分、第1の車輪と第2の車輪との制動力差の急増を抑制することができる。その結果、モータ保護制御と共に調整制御が行われる場合であっても、各制御の開始時における車両の挙動は、従来のモータ保護制御及び調整制御の開始時と比較して緩やかに変化する。そのため、車両の運転手は、上記モータ保護制御及び調整制御の開始に伴う車両の挙動変化を解消させるための車両操作を、落ち着いて行うことが可能となる。したがって、従来の場合と比較して、モータ保護制御及び調整制御を行う機会を増やすことができると共に、該モータ保護制御及び調整制御に伴う車両挙動の変化を補正するための車両操作を容易なものとすることができる。また、モータ保護制御及び調整制御の開始前における車両全体の制動力からの変化量を少なくすることができる。
【0016】
本発明の車両の制動制御装置において、前記モータ制御手段(15、S23,S26,S31)は、前記モータ保護制御時に、前記モータ保護制御の実行による車両全体の制動力(BP_all)の減少分を補うように前記正常モータに対する電流値(Ix)が上昇されるように前記調整制御を行うことが好ましい。
【0017】
上記構成によれば、モータ保護制御が行われる場合には、調整制御によって第2の車輪に対応する制動力が増大されるため、車両全体の制動力の減少が抑制される。また、モータ保護制御の開始時においては、第1の車輪に対する制動力の減少速度が従来の場合よりも低速度である分、このときの第2の車輪に対する制動力の増大速度は上記従来の場合と比較して低速度となる。そのため、モータ保護制御及び調整制御の実行に伴う第1の車輪と第2の車輪との制動力差の急増を抑制することができる。その結果、モータ保護制御と共に調整制御が行われる場合であっても、各制御の開始時における車両の挙動は、従来のモータ保護制御及び調整制御の開始時と比較して緩やかに変化する。そのため、車両の運転手は、上記モータ保護制御及び調整制御の開始に伴う車両の挙動変化を解消させるための車両操作を、落ち着いて行うことが可能となる。したがって、車両全体の制動力の減少分を補いつつ、従来の場合と比較してモータ保護制御及び調整制御を行う機会を増やすことができる。
【0018】
本発明の車両の制動制御装置において、前記モータ制御手段(15、S23,S31)は、前記モータ保護制御及び前記調整制御を行う場合、前記第2の車輪(Y)を含む前記第1の車輪(Y)以外の全ての車輪に対する制動力を調整することが好ましい。
【0019】
上記構成によれば、モータ保護制御が行われる場合には、第2の車輪を含む第1の車輪以外の全ての車輪に対する制動力が調整される。
本発明の車両の制動制御装置は、前記モータ保護制御及び前記調整制御の実行によって車両に生じるヨーレートの推定値(YR2)を取得するヨーレート取得手段(15、S29)をさらに備え、前記モータ制御手段(15、S23,S26,S30,S31)は、前記モータ保護制御及び前記調整制御を行う場合に、前記ヨーレート取得手段(15、S29)によって取得されたヨーレートの推定値(YR2)が「0(零)」に近づくように前記各車輪(FR,FL,RR,RL)のうち前記第1及び第2の各車輪(X,Y)以外の他の車輪に対する制動力を調整すべく、該他の車輪に制動力を付与するための電動ブレーキ装置(12,12a,12b,12c,12d)に搭載されるモータ(21)を制御することが好ましい。
【0020】
モータ保護制御及び調整制御が共に行われる場合、車両には第1の車輪と第2の車輪との間の制動力差に応じたヨーレートが発生する。そこで、本発明では、上記各制御の実行に伴い発生したヨーレートの推定値が取得され、該ヨーレートの推定値が「0(零)」に近づくように、第1及び第2の各車輪以外の他の車輪に対する制動力が調整される。そのため、モータ保護制御及び調整制御に伴う車両の挙動の変化を抑制することができる。したがって、過熱モータを保護する際に車両の挙動が不安定になりにくい分、モータ保護制御及び調整制御を行う機会を増やすことができると共に、該モータ保護制御に伴う車両挙動の変化を補正するための車両操作を容易なものとすることができる。
【0021】
なお、本発明をわかりやすく説明するために実施形態を示す図面の符号に対応づけて説明したが、本発明が実施形態に限定されるものではないことは言うまでもない。
【図面の簡単な説明】
【0022】
【図1】本発明の車両の制動制御装置を備える制動システムの一実施形態を示すブロック図。
【図2】過熱モータの温度に応じて電流値の変化勾配を設定するためのマップ。
【図3】(a)(b)は車両の走行状態が安定しているか否かを判定するためのマップ。
【図4】過熱モータに対する電流値を低下させるモータ保護制御を行う際におけるタイミングチャート。
【図5】実施形態の電流値補正処理ルーチンを示すフローチャート(前半部分)。
【図6】実施形態の電流値補正処理ルーチンを示すフローチャート(後半部分)。
【発明を実施するための形態】
【0023】
以下、本発明を具体化した一実施形態を、図1〜図6に従って説明する。なお、以下における本明細書中の説明においては、車両の進行方向(前進方向)を前方(車両前方)として説明する。
【0024】
図1に示すように、車両には、複数(本実施形態では4つ)の車輪FR,FL,RR,RLが設けられている。前輪FR,FLは、車両の前後方向において後輪RR,RLの前側に配置されている。また、右前輪FR及び右後輪RRは、車両の幅方向において左前輪FL及び左後輪RLの反対側に配置されている。こうした車両に搭載される制動システム11は、各車輪FR,FL,RR,RLに個別対応する複数(本実施形態では4つ)の電動ブレーキ装置12(12a,12b,12c,12d)と、運転手によるブレーキペダル13の踏力(「操作量」といってもよい。)を検出するための踏力検出装置14と、各電動ブレーキ装置12a〜12dを個別に制御する制動制御装置の一例としてのブレーキ用ECU15とを備えている。
【0025】
次に、電動ブレーキ装置12について説明する。
図1に示すように、電動ブレーキ装置12は、モータ21と、ブレーキ用ECU15からの指令に応じた電流をモータ21に流すべく駆動するモータ用駆動回路22と、モータ21の温度を検出するための温度センサ23とが設けられている。この温度センサ23からは、モータ21の温度に基づいた検出信号がブレーキ用ECU15に出力される。
【0026】
また、電動ブレーキ装置12には、車輪FR,FL,RR,RLと一体回転する円環状のブレーキロータ(図示略)と、ブレーキロータの摩擦面に対向配置されるブレーキパッド(図示略)とが設けられている。このブレーキパッドは、モータ21が駆動すると、該モータ21からの駆動力によってブレーキロータに接近する。そして、ブレーキパッドは、モータ21から伝達された駆動力に応じた押圧力でブレーキロータに摺接する。つまり、本実施形態では、モータ21で発生する駆動力、即ちモータ21に対する電流値に応じた制動力が車輪FR,FL,RR,RLに付与される。
【0027】
次に、本実施形態のブレーキ用ECU15について説明する。
図1に示すように、ブレーキ用ECU15には、各温度センサ23に加え、各車輪FR,FL,RR,RLの車輪速度を検出するための車輪速度センサ31a,31b,31c,31dが電気的に接続されている。また、ブレーキ用ECU15には、車両に搭載されるステアリング(図示略)の操舵角を検出するための操舵角センサ32と、車両のヨーレートを検出するためのヨーレートセンサ33とがさらに電気的に接続されている。また、ブレーキ用ECU15には、踏力検出装置14からブレーキペダル13の踏力に応じた信号(即ち、踏力信号)が入力される。そして、ブレーキ用ECU15は、入力された踏力信号に基づき、運転手が要求する制動力(以下、「要求制動力」ともいう。)に応じた制動力が車両全体に付与されるように各電動ブレーキ装置12のモータ21に対する電流値を設定し、該設定した電流値に基づいた指令を各電動ブレーキ装置12に出力する。
【0028】
なお、要求制動力は、運転手がブレーキペダル13を操作していない場合でも設定される。例えば、自動停止制御及び定速走行制御などのように制動制御を含んだ車両制御時には、要求制動力が「0(零)」よりも大きな値に設定される。
【0029】
ブレーキ用ECU15は、図示しないCPU、ROM及びRAMなどで構築されるデジタルコンピュータを有している。ブレーキ用ECU15のROMには、各種制御処理(例えば、図5及び図6に示す制御処理)、各種マップ(例えば、図2及び図3に示すマップ)及び各種閾値などが予め記憶されている。また、RAMには、車両の図示しないイグニッションスイッチが「オン」である間、適宜書き換えられる各種情報(後述する車体速度など)が一時的に記憶される。
【0030】
ところで、電動ブレーキ装置12のモータ21は、該モータ21に流れる電流に応じて発熱する。そして、発熱量がモータ21からの放熱量よりも多い場合には、モータ21の温度が上昇する。そして、モータ21の温度が予め設定された耐熱温度を超えた状態でモータ21が継続して使用されると、即ちモータ21に電流が流れ続けると、モータ21が故障するおそれがある。そのため、モータ21の温度が耐熱温度に近くなった場合には、温度が耐熱温度以上となる前に、該当するモータ(以下、「過熱モータ」ともいう。)を保護することが好ましい。
【0031】
本実施形態では、過熱モータがあると判定された場合に、過熱モータに対する電流値を低下させることにより、過熱モータの温度上昇を抑制するモータ保護制御が行われる。このモータ保護制御時における過熱モータに対する電流値の変化勾配(低下速度)は、図2に示すマップに基づき設定される。
【0032】
また、モータ保護制御が開始されると、過熱モータの駆動によって制動力が付与される第1の車輪(例えば、右前輪)と、車両の幅方向において第1の前輪の反対側に位置する第2の車輪(例えば、左前輪)との間で制動力差(以下、「左右制動力差」ともいう。)が発生する。左右制動力差が大きいと、車両に発生するヨーレートが大きくなり、即ち横滑りしやすい状態となる。つまり、車両の挙動が不安定傾向を示す。そのため、左右制動力差を発生させるようなモータ保護制御は、車両の走行状態が安定していると判定される場合にのみに実行が許可される。そこで、本実施形態では、図3(a)(b)に示すマップを用い、車両の走行状態が安定しているか否かが判定される。
【0033】
次に、図2及び図3(a)(b)に示す各種マップについて説明する。
始めに、図2に示す第1のマップについて説明する。
第1のマップは、過熱モータに対する電流値の変化勾配ΔIxを、その時点の過熱モータの温度Tが低温である場合には高温である場合よりも小さな値に設定するためのマップである。すなわち、図2に示すように、本実施形態では、耐熱温度Tmaxよりも低温に設定された複数(ここでは3つ)の設定閾値Tth1,Tth2,Tth3が予め設定されている。そして、過熱モータの温度Tが、各設定閾値Tth1,Tth2,Tth3のうち最も小さい第1の設定閾値Tth1以上であって且つ第2の設定閾値Tth2(>Tth1)未満である場合、変化勾配ΔIxは、第1の勾配ΔIx1(>0(零))に設定される。また、過熱モータの温度Tが、第2の設定閾値Tth2以上であって且つ第3の設定閾値Tth3(>Tth2)未満である場合、変化勾配ΔIxは、第1の勾配ΔIx1よりも大きな第2の勾配ΔIx2に設定される。そして、過熱モータの温度Tが、第3の設定閾値Tth3以上であって且つ耐熱温度Tmax未満である場合、変化勾配ΔIxは、第2の勾配ΔIx2よりも大きな第3の勾配ΔIx3に設定される。なお、第3の勾配ΔIx3は、従来のモータ保護制御時における過熱モータに対する電流値の変化勾配に近い値である。
【0034】
次に、図3(a)(b)に示す第2のマップについて説明する。
第2のマップは、ステアリングの操舵角θと車両の車体速度VSとに基づき、車両の走行状態が安定しているか否かを判定するためのマップである。具体的には、図3(a)に示す第2のマップは、左前輪FL又は左後輪RLが第1の車輪である場合のマップである一方、図3(b)に示す第2のマップは、右前輪FR又は右後輪RRが第1の車輪である場合のマップである。そして、各第2のマップにおいて、斜線を付した領域が不安定側の領域であると共に、斜線を付していない領域が安定側の領域である。つまり、操舵角θ及び車体速度VSが不安定側の領域に属する場合には、車両の走行状態が安定していないと判定される。一方、操舵角θ及び車体速度VSが安定側の領域に属する場合には、車両の走行状態が安定していると判定される。
【0035】
図3(a)に示すように、車両が左旋回する場合において左前輪FL又は左後輪RLが第1の車輪であるときには、旋回方向外側に位置する右前輪FR又は右後輪RRが第2の車輪になる。この状態でモータ保護制御が行われると、旋回方向内側の車輪に対する制動力は、旋回方向外側の車輪に対する制動力よりも小さくなる。その結果、こうした左右制動力差によって、車両には右旋回させようとするヨーモーメントが発生する。このヨーモーメントは、運転手によるステアリングの操舵に基づき発生するヨーモーメントとは反対方向になり、左右制動力差を発生させても車両のスピン傾向は強くならない。
【0036】
一方、車両が右旋回する場合において左前輪FL又は左後輪RLが第1の車輪であるときには、旋回方向内側に位置する右前輪FR又は右後輪RRが第2の車輪になる。この状態でモータ保護制御が行われると、旋回方向内側の車輪に対する制動力は、旋回方向外側の車輪に対する制動力よりも大きくなる。その結果、こうした左右制動力差によって、車両には右旋回させようとするヨーモーメントが発生する。このヨーモーメントは、運転手によるステアリングの操舵に基づき発生するヨーモーメントと同方向である。そのため、左右制動力差を発生させると、車両のスピン傾向が強くなる。
【0037】
そこで、車両の走行状態が安定しているか否かの判断基準である車速判定値KSは、左前輪FL又は左後輪RLが第1の車輪である場合において車両が左旋回するときには、ステアリングの操舵角θの絶対値が大きくなっても比較的大きな値で一定となっている。一方、車速判定値KSは、左前輪FL又は左後輪RLが第1の車輪である場合において車両が右旋回するときには、ステアリングの操舵角θの絶対値が大きくなるほど小さな値に設定される。その結果、左前輪FL又は左後輪RLに対応するモータ21が過熱モータである際には、車両が左旋回する場合のほうが右旋回する場合よりも、モータ保護制御の実行機会が多くなる。
【0038】
図3(b)に示すように、車両が右旋回する場合において右前輪FR又は右後輪RRが第1の車輪であるときには、旋回方向外側に位置する左前輪FL又は左後輪RLが第2の車輪になる。この状態でモータ保護制御が行われると、旋回方向内側の車輪に対する制動力は、旋回方向外側の車輪に対する制動力よりも小さくなる。その結果、こうした左右制動力差によって、車両には左旋回させようとするヨーモーメントが発生する。このヨーモーメントは、運転手によるステアリングの操舵に基づき発生するヨーモーメントとは反対方向になる。そのため、左右制動力差を発生させても車両のスピン傾向は強くならない。
【0039】
一方、車両が左旋回する場合において右前輪FR又は右後輪RRが第1の車輪であるときには、旋回方向内側に位置する左前輪FL又は左後輪RLが第2の車輪になる。この状態でモータ保護制御が行われると、旋回方向内側の車輪に対する制動力は、旋回方向外側の車輪に対する制動力よりも大きくなる。その結果、こうした左右制動力差によって、車両には左旋回させようとするヨーモーメントが発生する。このヨーモーメントは、運転手によるステアリングの操舵に基づき発生するヨーモーメントと同方向になる。そのため、左右制動力差を発生させると、車両のスピン傾向が強くなる。
【0040】
そこで、車速判定値KSは、右前輪FR又は右後輪RRが第1の車輪である場合において車両が右旋回するときには、ステアリングの操舵角θの絶対値が大きくなっても比較的大きな値で一定となっている。一方、車速判定値KSは、右前輪FR又は右後輪RRが第1の車輪である場合において車両が左旋回するときには、ステアリングの操舵角θの絶対値が大きくなるほど小さな値に設定される。その結果、右前輪FR又は右後輪RRに対応するモータ21が過熱モータである際には、車両が右旋回する場合のほうが左旋回する場合よりも、モータ保護制御の実行機会が多くなる。
【0041】
したがって、本実施形態では、車両の車体速度VSが、車両の走行状態の安定度合を数値化した安定度相当値に相当する。また、車速判定値KSが、走行状態が安定しているか否かの判断基準である安定基準値に相当する。
【0042】
次に、4つのモータ21のうち何れか一つのモータが過熱モータである場合の作用について、図4に示すタイミングチャートを参照して説明する。なお、図4で示す破線は、従来の方法で過熱モータを保護する場合を示したものである。また、各車輪FR,FL,RR,RLのうち何れか一つの車輪が過熱モータになっても、車両の走行状態は安定しているものとする。
【0043】
さて、図4のタイミングチャートに示すように、運転手によるブレーキペダル13の操作などによって要求制動力Breqが「0(零)」から徐々に大きくなる第1のタイミングt1以降では、車両全体の制動力BP_allは、要求制動力Breqに近づくように増大される。このとき、各電動ブレーキ装置12のモータ21に対する電流値は、要求制動力Breqに応じて次第に大きくなる。すると、各車輪FR,FL,RR,RLには、対応するモータ21に対する電流値に応じた制動力がそれぞれ付与される。
【0044】
そして、運転手によるブレーキペダル13の踏力が一定になる第2のタイミングt2以降では、要求制動力Breqが一定となる。すると、各車輪FR,FL,RR,RLに対する制動力を保持するため、各モータ21に対する電流値もまた一定とされる。その後の第3のタイミングt3で、各モータ21のうち何れか一つのモータ21(例えば、右前輪FR用のモータ21)の温度Tが第1の設定閾値Tth1以上になると、該当するモータ21が過熱モータとされる。なお、この時点では、過熱モータ以外の他のモータ21の温度Tは、第1の設定閾値Tth1よりも十分に低い値である。
【0045】
すると、過熱モータを保護するためのモータ保護制御、及びモータ保護制御の実行に伴う車両全体の制動力BP_allの低下を抑制するための調整制御が開始される。ここでは、まず始めに、従来のモータ保護制御及び調整制御について説明する。
【0046】
すなわち、図4にて破線で示すように、従来のモータ保護制御では、過熱モータの保護が最優先され、過熱モータに対する電流値Ixが急激に低下される。このときの電流値Ixの変化勾配は、上記第3の勾配ΔIx3又は該第3の勾配ΔIx3に近い値である。すると、過熱モータに対する電流値Ixの急激な低下に伴って、第1の車輪Xに対する制動力BPxが急激に減少される。その結果、電流値Ixが低くなる分、過熱モータでの発熱量が少なくなり、過熱モータの温度Tの温度上昇速度が遅くなる。そして、過熱モータの温度上昇速度が予め設定された規定速度以下になる第5のタイミングt5では、過熱モータの温度が耐熱温度Tmaxを超える可能性が低くなったと判断される。すると、過熱モータに対する電流値Ixの低下が停止される。そのため、第5のタイミングt5以降では、過熱モータの温度Tは、第5のタイミングt5直前の温度又は該温度に近い値で保持される。
【0047】
こうしたモータ保護制御が行われると、第1の車輪Xに対する制動力BPxが減少される。また、モータ保護制御が開始されると、車両の幅方向において第1の車輪Xの反対側に位置する第2の車輪Yに対する制動力BPyを増大させる調整制御が開始される。このときの制動力BPyの増大量は、第1の車輪Xに対する制動力BPxの減少量と同程度である。このように第2の車輪Yに対する制動力BPyを調整することにより、車両全体の制動力BP_allの低下が抑制される。
【0048】
しかし、従来のモータ保護制御では、第1の車輪Xに対する制動力BPxが急激に減少される。そのため、調整制御では、第1の車輪Xに対する制動力BPxの急激な減少に対応させるべく、第2の車輪Yに対する制動力BPyが急激に増大される。その結果、第1の車輪Xと第2の車輪Yとの左右制動力差BPsubが急増する。つまり、左右制動力差BPsubが急増する分、車両の挙動が急激に変化する。
【0049】
この点、本実施形態の方法では、各モータ21のうち何れか一つが過熱モータとなったとしても、車両の挙動の急激な変化が抑制される。すなわち、過熱モータに対する電流値Ixの変化勾配は、図2に示す第1のマップを用い、その時点の過熱モータの温度Tが低温である場合には高温である場合よりも緩勾配に設定される。
【0050】
そのため、第3のタイミングt3以降では、従来のモータ保護制御が行われる場合と比較して過熱モータの温度Tが比較的低温である分、電流値Ixは緩やかに低下される。その結果、従来のモータ保護制御が行われる場合と比較して、第1の車輪Xに対する制動力BPxが緩やかに減少される。また、モータ保護制御と同時に開始される調整制御では、第1の車輪Xに対する制動力BPxの減少速度が低速である分、第2の車輪Yに対する制動力BPyは緩やかに増大される。つまり、過熱モータの検出直後においては、左右制動力差BPsubが緩やかに大きくなるため、車両の挙動は緩やかに不安定側に変化する。
【0051】
このように過熱モータに対する電流値Ixを緩やかに低下させる場合には、過熱モータの温度上昇が継続されることがある。そして、過熱モータの温度Tが第2の設定閾値Tth2以上になる第4のタイミングt4では、過熱モータに対する電流値Ixの変化勾配ΔIxが、第1の勾配ΔIx1から第2の勾配ΔIx2に変更される。すると、第4のタイミングt4以降では、第4のタイミングt4以前と比較して変化勾配ΔIxが大きくなる分、第1の車輪Xに対する制動力BPxの減少勾配が大きくなる。そのため、第2の車輪Yに対する制動力BPyの増大勾配は、第4のタイミングt4以前よりも急勾配となる。しかし、第2の勾配ΔIx2が、電流値Ixの従来の変化勾配よりも小さい値であるため、第4のタイミングt4以降での左右制動力差BPsubの変化量は、従来の場合と比較して少ない。そのため、過熱モータの温度Tが第3の設定閾値Tth3未満である場合には、従来の場合と比較して、車両の挙動は緩やかに不安定側に変化する。
【0052】
上記のように電流値Ixの変化勾配ΔIxを大きくして過熱モータでの発熱量を少なくしても、発熱量のほうが放熱量よりも多いと、過熱モータの温度上昇は継続される。そして、過熱モータの温度Tが第3の設定閾値Tth3以上になる第6のタイミングt6では、過熱モータに対する電流値Ixの変化勾配ΔIxが、第2の勾配ΔIx2から第3の勾配ΔIx3に変更される。つまり、過熱モータの温度Tが第3の設定閾値Tth3以上になると、過熱モータの保護が最優先される。すると、第6のタイミングt6以降では、第1の車輪Xに対する制動力BPxの減少勾配、及び第2の車輪Yに対する制動力BPyの増大勾配は、従来の場合と同程度となる。
【0053】
その結果、左右制動力差BPsubの変化量は従来の場合と同程度となるものの、過熱モータの温度上昇は抑制される。そして、過熱モータの温度上昇が極めて少なくなる第7のタイミングt7で、過熱モータに対する電流値Ixが保持される。
【0054】
次に、上記モータ保護制御及び調整制御を行う際にブレーキ用ECU15が実行する電流値補正処理ルーチンについて、図5及び図6に示すフローチャートを参照して説明する。
【0055】
さて、電流値補正処理ルーチンは、予め設定された所定周期毎(例えば、0.01秒毎)に実行される処理ルーチンである。この電流値補正処理ルーチンにおいて、ブレーキ用ECU15は、要求制動力Breqを取得し(ステップS10)、該取得した要求制動力Breqが「0(零)」ではないか否かを判定する(ステップS11)。要求制動力Breqが「0(零)」である場合(ステップS11:NO)、ブレーキ用ECU15は、各車輪FR,FL,RR,RLに制動力を付与していないため、電流値補正処理ルーチンを一旦終了する。一方、要求制動力Breqが「0(零)」ではない場合(ステップS11:YES)、ブレーキ用ECU15は、各電動ブレーキ装置12a〜12dの温度センサ23からの検出信号に基づき、各モータ21の温度Tを取得(演算)する(ステップS12)。したがって、本実施形態では、ブレーキ用ECU15が、温度取得手段として機能する。
【0056】
続いて、ブレーキ用ECU15は、取得した温度Tが第1の設定閾値Tth1以上となるモータ、即ち過熱モータがあるか否かを判定する(ステップS13)。本実施形態では、第1の設定閾値Tth1が、モータ21が過熱傾向(即ち、耐熱温度Tmaxに近づく傾向)にあるか否かの判断基準である温度基準値に相当する。したがって、本実施形態では、ブレーキ用ECU15が、各モータ21の中に過熱モータがあるか否かを判定する判定手段としても機能する。
【0057】
過熱モータがない場合(ステップS13:NO)、ブレーキ用ECU15は、全てのモータ21の温度Tが第1の設定閾値Tth1未満であるため、電流値補正処理ルーチンを一旦終了する。一方、過熱モータがある場合(ステップS13:YES)、ブレーキ用ECU15は、過熱モータは一つのみであるか否かを判定する(ステップS14)。過熱モータが複数ある場合(ステップS14:NO)、ブレーキ用ECU15は、電流値補正処理ルーチンを一旦終了する。一方、過熱モータが一つのみである場合(ステップS14:YES)、ブレーキ用ECU15は、過熱モータの温度Tの単位時間あたりの変化量を、過熱モータの温度上昇速度ΔTとして演算する(ステップS15)。そして、ブレーキ用ECU15は、演算した温度上昇速度ΔTが、過熱モータの温度上昇がほとんど見られなくなったと判断するための判断基準として設定された規定速度ΔTth以下であるか否かを判定する(ステップS16)。
【0058】
温度上昇速度ΔTが規定速度ΔTthを超える場合(ステップS16:NO)、ブレーキ用ECU15は、過熱モータの温度上昇が継続中であると判断し、その処理を後述するステップS18に移行する。一方、温度上昇速度ΔTが規定速度ΔTth以下である場合(ステップS16:YES)、ブレーキ用ECU15は、過熱モータの温度上昇がほとんど見られなくなったと判断し、その処理を次のステップS17に移行する。
【0059】
ステップS17において、ブレーキ用ECU15は、過熱モータに対する電流値Ix、及び第2の車輪Yに対応する電動ブレーキ装置12に搭載されるモータ(以下、「正常モータ」ともいう。)に対する電流値Iyを、前回の電流値補正処理ルーチンの実行時に設定された値に設定する。そして、ブレーキ用ECUは、その処理を後述するステップS27に移行する。
【0060】
ステップS18において、ブレーキ用ECU15は、各車輪速度センサ31a〜31dからの検出信号に基づき、車両の車体速度VSを取得する。続いて、ブレーキ用ECU15は、操舵角センサ32からの検出信号に基づき、ステアリングの操舵角θを取得する(ステップS19)。本実施形態では、車体速度VSは、車両の走行状態が安定しているか否かを判断するためのパラメータであり、安定度相当値に該当する。また、操舵角θは、安定基準値である車速判定値KSの大きさを設定するためのパラメータである(図3参照)。したがって、本実施形態では、ブレーキ用ECU15が、安定度取得手段としても機能する。
【0061】
そして、ブレーキ用ECU15は、各モータ21に対する電流値を要求電流値Imとして設定する(ステップS20)。この要求電流値Imは、ステップS10で取得された要求制動力Breqに応じた電流値である。続いて、ブレーキ用ECU15は、過熱モータに対する電流値Ixの変化勾配ΔIxを、図2に示す第1のマップを用いて設定する(ステップS21)。その結果、変化勾配ΔIxは、その時点の過熱モータの温度が低温である場合には高温である場合よりも緩勾配に設定される。
【0062】
そして、ブレーキ用ECU15は、過熱モータに対する電流値の候補として、電流値候補値Iaを設定する(ステップS22)。具体的には、ブレーキ用ECU15は、前回の電流値補正処理ルーチンの実行時に設定された過熱モータに対する電流値IxをRAMから読み出し、該電流値を前回の電流値Ix(n−1)とする。なお、「n」は、車両の図示しないイグニッションスイッチがオンになってからの電流値補正処理ルーチンの実行回数である。そして、ブレーキ用ECU15は、前回の電流値Ix(n−1)から、ステップS18で設定した変化勾配ΔIxを減算し、該演算結果を電流値候補値Ia(=Ix(n−1)−ΔIx)とする。
【0063】
続いて、ブレーキ用ECU15は、ステップS20で設定した過熱モータに対する要求電流値Imと、ステップS22で演算した電流値候補値Iaとの比較結果に基づき、過熱モータに対する今回の電流値Ixを設定する(ステップS23)。本実施形態では、ブレーキ用ECU15は、要求電流値Im及び電流値候補値Iaのうち小さい方の値を、過熱モータに対する今回の電流値Ixとする。
【0064】
そして、ブレーキ用ECU15は、図3(a)(b)に示す第2のマップを用い、車両の走行状態が安定しているか否かを判定する(ステップS24)。具体的には、ブレーキ用ECU15は、過熱モータに対応する第1の車輪Xが左前輪FL又は左後輪RLである場合には図3(a)に示す第2のマップを選択し、過熱モータに対応する第1の車輪Xが右前輪FR又は右後輪RRである場合には図3(b)に示す第2のマップを選択する。そして、ブレーキ用ECU15は、ステップS19で取得した操舵角θに基づいた車速判定値KSを、選択した第2のマップに基づき設定する。続いて、ブレーキ用ECU15は、ステップS18で取得した車体速度VSが、設定した車速判定値KS未満であるか否かを判定する。
【0065】
車体速度VSが車速判定値KS未満である場合(ステップS24:YES)、ブレーキ用ECU15は、車両の走行状態が安定していると判定し、その処理を後述するステップS26に移行する。一方、車体速度VSが車速判定値KS以上である場合(ステップS24:NO)、ブレーキ用ECU15は、車両の走行状態が安定していないと判定し、その処理を次のステップS25に移行する。
【0066】
ステップS25において、ブレーキ用ECU15は、第2の車輪Yに対応する正常モータに対する電流値Iyを、過熱モータに対する電流値Ixと同一値にする。そして、ブレーキ用ECU15は、その処理を後述するステップS31に移行する。この場合、第2の車輪Yに対する制動力BPyは、第1の車輪Xに対する制動力BPxと同程度となる。そのため、左右制動力差BPsubはほとんど発生しないため、車両全体の制動力BP_allは減少されるものの、過熱モータを保護する際に車両の挙動が不安定になることが抑制される。
【0067】
ステップS26において、ブレーキ用ECU15は、過熱モータに対する電流値Ixの低下に起因した車両全体の制動力BP_allの減少分を補うように、正常モータに対する電流値Iyを設定する。例えば、ブレーキ用ECU15は、ステップS23で設定した電流値Ixと前回の電流値Ix(n−1)との差分を演算する。そして、ブレーキ用ECU15は、前回の電流値補正処理ルーチンの実行時に設定された正常モータに対する電流値に対して上記差分を加算し、該加算結果を正常モータに対する電流値Iyとする。その後、ブレーキ用ECU15は、その処理を次のステップS27に移行する。
【0068】
ステップS27において、ブレーキ用ECU15は、ヨーレートセンサ33からの検出信号に基づき、車両のヨーレートYRを取得する。このヨーレートYRは、運転手によるステアリング操作及びアクセル操作に基づいたヨーモーメントと、モータ保護制御及び調整制御に基づいたヨーモーメントとを含んだ値である。続いて、ブレーキ用ECU15は、ステップS18,S19で取得した車体速度VS及び操舵角θに基づいた推定ヨーレートYR1を、以下に示す関係式(式1)を用いて演算する(ステップS28)。ここで演算される推定ヨーレートYR1は、運転手によるステアリング操作及びアクセル操作に基づき車両に発生するヨーモーメントに応じた値である。つまり、左右制動力差BPsubが発生していない場合、推定ヨーレートYR1は、ヨーレートYRとほぼ一致する。
【0069】
【数1】
ただし、L…ホイールベース長(前輪と後輪との間の距離)、A…スタビリティファクタ(定数)
そして、ブレーキ用ECU15は、ステップS27で取得したヨーレートYRからステップS28で演算した推定ヨーレートYR1を減算し、該減算結果を発生ヨーレート(ヨーレートの推定値)YR2とする(ステップS29)。この発生ヨーレートYR2は、モータ保護制御及び調整制御の実行によって車両に発生し得るヨーモーメントに応じた値である。したがって、本実施形態では、ブレーキ用ECU15が、ヨーレート取得手段としても機能する。
【0070】
続いて、ブレーキ用ECU15は、ステップS29で演算した発生ヨーレートYR2を「0(零)」に近づけるように、各車輪FR,FL,RR,RLのうち第1及び第2の各車輪以外の他の車輪に対応する各電動ブレーキ装置12のモータ21に対する電流値Izを調整する(ステップS30)。例えば、右前輪FR(又は左前輪FL)が第1の車輪Xであると共に左前輪FL(又は右前輪FR)が第2の車輪Yである場合、後輪RR,RLが他の車輪に相当する。そして、第1の車輪Xである右前輪FRに対する制動力BPxが減少されると共に、第2の車輪Yである左前輪FLに対する制動力BPyが増大されると、ブレーキ用ECU15は、右方向へのヨーモーメントを解消させるために、左後輪RLに対する制動力のほうが右後輪RRに対する制動力よりも大きくなるように、各モータ21に対する電流値Izを調整する。
【0071】
一方、右後輪RR(又は左後輪RL)が第1の車輪Xであると共に左後輪RL(又は右後輪RR)が第2の車輪Yである場合、前輪FR,FLが他の車輪に相当する。そして、ブレーキ用ECU15は、その処理を次のステップS31に移行する。
【0072】
ステップS31において、ブレーキ用ECU15は、設定した各モータ21に対する電流値に対応する指令を、各電動ブレーキ装置12a〜12dに出力する。すると、各電動ブレーキ装置12a〜12dのモータ21に対する電流値は、入力された指令に基づいた電流値となる。そして、各車輪FR,FL,RR,RLには、モータ21に対する電流値に応じた制動力がそれぞれ付与される。したがって、本実施形態では、ブレーキ用ECU15が、モータ制御手段としても機能する。その後、ブレーキ用ECU15は、電流値補正処理ルーチンを一旦終了する。
【0073】
以上説明したように、本実施形態では、以下に示す効果を得ることができる。
(1)各モータ21のうち何れか一つのモータが過熱モータである場合、該過熱モータの保護を図るために、過熱モータに対する電流値Ixが低下される。このとき、過熱モータに対する電流値Ixは、過熱モータの温度Tが低温である場合には高温である場合よりも緩やかな勾配で低下される。そのため、過熱モータの温度Tとは関係なく電流値Ixを急勾配で低下させる従来の場合と比較して、モータ保護制御の開始直後においては、第1の車輪Xと第2の車輪Yとの左右制動力差BPsubの急増を抑制することができる。
【0074】
(2)こうしたモータ保護制御が開始されても、過熱モータの温度Tの上昇が継続される場合には、過熱モータの電流値Ixの変化勾配ΔIxが大きな値に変更される。つまり、1つのモータの温度Tが第1の設定閾値Tth1以上になっても、当該モータの温度Tが比較的低い場合には、車両の挙動の急変の抑制が優先的に行われる。しかし、過熱モータの温度Tが高温になると、該過熱モータの保護が優先的に行われる。したがって、過熱モータの温度Tが耐熱温度Tmax以上になることを抑制でき、ひいては過熱モータを適切に保護することができる。
【0075】
(3)モータ保護制御が行われる場合には、第2の車輪Yに対する制動力BPyを増大させる調整制御が行われる。このように調整制御がモータ保護制御と共に行われる場合であっても、従来の場合と比較して第1の車輪Xに対する制動力BPxの減少速度が低速である分、第1の車輪Xと第2の車輪Yとの左右制動力差BPsubは緩やかに増加する。つまり、モータ保護制御及び調整制御の実行に伴う車両の挙動の急変を抑制することができる。
【0076】
(4)そして、モータ保護制御と共に調整制御が行われることにより、第1の車輪Xに対する制動力BPxの減少分を、第2の車輪Yに対する制動力BPyを増大させることにより、車両全体の制動力BP_allの減少を抑制することができる。そのため、モータ保護制御及び調整制御の実行に伴う車両全体の制動力BP_allの変動が抑制される分、モータ保護制御及び調整制御の実行に伴う違和感を、車両の運転手に感じさせにくくすることができる。
【0077】
(5)変化勾配ΔIxを過熱モータの温度Tに応じて変更する制御構成にしたことにより、モータ保護制御及び調整制御の開始時においては、車両の挙動が緩やかに変化する。そのため、車両の運転手は、モータ保護制御及び調整制御の実行に伴う車両の挙動変化を解消させるための車両操作を、落ち着いて行うことが可能となる。つまり、モータ保護制御及び調整制御に伴う車両挙動の変化を補正するために運転手に要求される車両操作を容易なものとすることができる。
【0078】
(6)また、従来の場合と比較して、モータ保護制御及び調整制御の開始直後における車両の挙動の急変を抑制できる分、車両の走行状態が安定しているか否かの判定基準(本実施形態では、車速判定値KS)を弛めに設定することができる。その結果、モータ保護制御を実行する機会を、従来の場合と比較して多くすることができる。
【0079】
(7)さらに、本実施形態では、モータ保護制御及び調整制御の実行時においては、該各制御の実行によって発生したヨーモーメントを打ち消すように、第1及び第2の車輪X,Y以外の他の車輪に対する制動力が調整される。そのため、モータ保護制御及び調整制御の実行に伴う車両挙動の不安定化を抑制できる。つまり、他の車輪に対する制動力調整を行わない場合と比較して、車両の走行状態が安定しているか否かの判定基準を、さらに弛めに設定することができる。その結果、モータ保護制御を実行する機会を、さらに多くすることができる。
【0080】
(8)また、モータ保護制御の実行によって第1の車輪Xの温度上昇速度ΔTが規定速度ΔTth以下になった場合には、過熱モータでの発熱量と過熱モータからの放熱量とがほぼ釣り合ったと判断される。その結果、モータ保護制御の実行による過熱モータに対する電流値Ixの低下が停止される。そのため、温度上昇速度ΔTが規定速度ΔTth以下になっても電流値Ixの低下が継続される場合と比較して、モータ保護制御及び調整制御の実行に伴う左右制動力差BPsubの増大を抑制することができる。
【0081】
(9)運転手によるブレーキペダル13の踏力が弱くなるなどして要求制動力Breqが減少される場合においては、ステップS20で設定される過熱モータに対応する要求電流値Imのほうが、ステップS22で演算される電流値候補値Iaよりも小さくなることがある。この場合、本実施形態では、過熱モータに対する電流値Ixは、要求電流値Imに設定される。そのため、要求制動力Breqの減少に応じて、車両全体の制動力BP_allを適切に減少させることができる。
【0082】
なお、実施形態は以下のような別の実施形態に変更してもよい。
・実施形態において、車両の右旋回時において第1の車輪Xが旋回方向内側の車輪(右前輪FR,右後輪RR)である場合、モータ保護制御及び調整制御の実行によって発生したヨーモーメント(即ち、発生ヨーレートYR2)を打ち消すような制動制御を行わなくてもよい、即ちステップS27〜S30の各処理を行わなくてもよい。同様に、車両の左旋回時において第1の車輪Xが旋回方向内側の車輪(左前輪FL,左後輪RL)である場合、モータ保護制御及び調整制御の実行によって発生したヨーモーメント(即ち、発生ヨーレートYR2)を打ち消すような制動制御を行わなくてもよい、即ちステップS27〜S30の各処理を行わなくてもよい。
【0083】
・実施形態において、ステップS27〜S30の各処理を省略してもよい。このように構成しても、モータ保護制御を実行する機会を、ステップS27〜S30の各処理を行う場合よりは少なくなるものの、従来の場合よりも多くすることができる。
【0084】
・実施形態において、調整制御は、第1の車輪X以外の他の全ての車輪(第2の車輪Yも含む。)に対する制動力を調整することにより、車両全体の制動力BP_allの減少を抑制する制御であってもよい。
【0085】
・実施形態において、モータ保護制御の実行時での第2の車輪Yに対する制動力BPyの増大量は、第1の車輪Xに対する制動力BPxの減少量と対応していなくてもよい。
・実施形態において、モータ保護制御の実行時に、調整制御を行わなくてもよい。
【0086】
・実施形態において、モータ保護制御を、過熱モータに対応する第1の車輪Xが前輪FR,FLである場合に行ってもよい。
逆に、モータ保護制御を、過熱モータに対応する第1の車輪Xが後輪RR,RLである場合に行ってもよい。
【0087】
・実施形態において、電流値Ixの変化勾配ΔIxを、過熱モータの温度Tが高温になるに連れて次第に大きくなるように設定してもよい。この場合、変化勾配ΔIxを、過熱モータの温度Tをパラメータとした一次関数又は二次関数に基づき設定してもよい。
【0088】
・実施形態において、モータ21の温度は、モータ21に対する電流値の大きさ、及び通電時間などをパラメータとして演算した推定値であってもよい。
・実施形態において、車両の走行状態が安定しているか否かを、車両のヨーレートYRを用いて判断してもよい。例えば、ヨーレートYRがヨーレート判定値未満である場合に、車両の走行状態が安定していると判定してもよい。この場合、ヨーレート判定値は、車両の車体速度VSが高速である場合ほど小さな値に設定してもよい。このような制御構成においては、ヨーレートYRが、車両の走行状態の安定度合を数値化した安定度相当値に該当し、ヨーレート判定値が、走行状態が安定しているか否かの判断基準である安定基準値に該当する。
【0089】
・実施形態において、車両の右旋回時において第1の車輪Xが旋回方向内側の車輪(右前輪FR,右後輪RR)である場合、ステップS24の判定処理を行うことなく、モータ保護制御及び調整制御を行ってもよい。同様に、車両の左旋回時において第1の車輪Xが旋回方向内側の車輪(左前輪FL,左後輪RL)である場合、ステップS24の判定処理を行うことなく、モータ保護制御及び調整制御を行ってもよい。この場合、モータ保護制御及び調整制御の実行によって発生したヨーモーメントは、運転手によるステアリング操作によって発生するヨーモーメントとは反対方向のモーメントである。そのため、モータ保護制御及び調整制御を行っても、車両の挙動が不安定になることがあまりない。
【0090】
次に、上記実施形態及び別の実施形態から把握できる技術的思想を以下に追記する。
(イ)前記モータ制御手段(15、S23,S31)は、前記調整制御を行う場合、前記モータ保護制御の実行による車両全体の制動力の減少分を補うように前記第2の車輪(Y)を含む前記第1の車輪(X)以外の全ての車輪に対する制動力を増大させるべく、前記第1の車輪(X)以外の全ての車輪に対応する電動ブレーキ装置(12,12a,12b,12c,12d)に搭載されるモータ(12)に対する電流値をそれぞれ調整することを特徴とする車両の制動制御装置。
【0091】
(ロ)車両の走行状態の安定度合を数値化した安定度相当値(VS、YR)を取得する安定度取得手段(15、S18)をさらに備え、
前記モータ制御手段(15、S23,S31)は、前記安定度取得手段(15、S18)によって取得された安定度相当値(VS、YR)が、車両の走行状態が安定しているか否かの判断基準である安定基準値(KS)以下である場合に、前記モータ保護制御の実行を許可することを特徴とする車両の制動制御装置。
【符号の説明】
【0092】
12,12a〜12d…電動ブレーキ装置、15…制動制御装置としてのブレーキ用ECU(温度取得手段、判定手段、モータ制御手段、ヨーレート取得手段、安定度取得手段)、21…モータ、FR,FL,RR,RL…車輪、KS…安定基準値の一例としての車速判定値、Ix…過熱モータに対する電流値、Iy…正常モータに対する電流値、T…温度、Tth1…温度基準値としての第1の設定閾値、VS…安定度相当値の一例としての車体速度、X…第1の車輪、Y…第2の車輪、YR…安定度相当値の一例としてのヨーレート、YR2…ヨーレートの推定値としての発生ヨーレート。
【特許請求の範囲】
【請求項1】
車両に設けられた複数の車輪(FR,FL,RR,RL)に個別対応すると共に、モータ(21)を有する複数の電動ブレーキ装置(12,12a,12b,12c,12d)を制御する車両の制動制御装置であって、
前記電動ブレーキ装置(12,12a,12b,12c,12d)は、前記モータ(21)に対する電流値に応じた制動力を、対応する車輪(FR,FL,RR,RL)に付与する構成となっており、
前記各モータ(21)の温度(T)を取得する温度取得手段(15、S12)と、
取得された温度(T)が過熱傾向であるか否かの判断基準として設定された温度基準値(Tth1)以上となる過熱モータが、前記各モータ(21)の中にあるか否かを判定する判定手段(15、S13)と、
前記各モータ(21)のうち何れか一つのモータが前記過熱モータであると判定された場合に、該過熱モータに対する電流値(Ix)を、前記過熱モータの温度(T)が低温である場合には高温である場合よりも緩やかな勾配で低下させるモータ保護制御を行うモータ制御手段(15、S23,S31)と、を備えることを特徴とする車両の制動制御装置。
【請求項2】
前記モータ制御手段(15、S23,S31)は、
前記モータ保護制御を行う場合に、
搭載するモータ(21)が前記過熱モータとなった電動ブレーキ装置(12,12a,12b,12c,12d)によって制動力が付与される第1の車輪(X)とは車両の幅方向において反対側に位置する第2の車輪(Y)に制動力を付与するための電動ブレーキ装置(12,12a,12b,12c,12d)に搭載される正常モータに対する電流値(Iy)を上昇させる調整制御を行うことを特徴とする請求項1に記載の車両の制動制御装置。
【請求項3】
前記モータ制御手段(15、S23,S26,S31)は、前記モータ保護制御時に、前記モータ保護制御の実行による車両全体の制動力(BP_all)の減少分を補うように前記正常モータに対する電流値(Ix)が上昇されるように前記調整制御を行うことを特徴とする請求項2に記載の車両の制動制御装置。
【請求項4】
前記モータ制御手段(15、S23,S31)は、前記モータ保護制御及び前記調整制御を行う場合、前記第2の車輪(Y)を含む前記第1の車輪(Y)以外の全ての車輪に対する制動力を調整することを特徴とする請求項2に記載の車両の制動制御装置。
【請求項5】
前記モータ保護制御及び前記調整制御の実行によって車両に生じるヨーレートの推定値(YR2)を取得するヨーレート取得手段(15、S29)をさらに備え、
前記モータ制御手段(15、S23,S26,S30,S31)は、前記モータ保護制御及び前記調整制御を行う場合に、前記ヨーレート取得手段(15、S29)によって取得されたヨーレートの推定値(YR2)が「0(零)」に近づくように前記各車輪(FR,FL,RR,RL)のうち前記第1及び第2の各車輪(X,Y)以外の他の車輪に対する制動力を調整すべく、該他の車輪に制動力を付与するための電動ブレーキ装置(12,12a,12b,12c,12d)に搭載されるモータ(21)を制御することを特徴とする請求項4に記載の車両の制動制御装置。
【請求項1】
車両に設けられた複数の車輪(FR,FL,RR,RL)に個別対応すると共に、モータ(21)を有する複数の電動ブレーキ装置(12,12a,12b,12c,12d)を制御する車両の制動制御装置であって、
前記電動ブレーキ装置(12,12a,12b,12c,12d)は、前記モータ(21)に対する電流値に応じた制動力を、対応する車輪(FR,FL,RR,RL)に付与する構成となっており、
前記各モータ(21)の温度(T)を取得する温度取得手段(15、S12)と、
取得された温度(T)が過熱傾向であるか否かの判断基準として設定された温度基準値(Tth1)以上となる過熱モータが、前記各モータ(21)の中にあるか否かを判定する判定手段(15、S13)と、
前記各モータ(21)のうち何れか一つのモータが前記過熱モータであると判定された場合に、該過熱モータに対する電流値(Ix)を、前記過熱モータの温度(T)が低温である場合には高温である場合よりも緩やかな勾配で低下させるモータ保護制御を行うモータ制御手段(15、S23,S31)と、を備えることを特徴とする車両の制動制御装置。
【請求項2】
前記モータ制御手段(15、S23,S31)は、
前記モータ保護制御を行う場合に、
搭載するモータ(21)が前記過熱モータとなった電動ブレーキ装置(12,12a,12b,12c,12d)によって制動力が付与される第1の車輪(X)とは車両の幅方向において反対側に位置する第2の車輪(Y)に制動力を付与するための電動ブレーキ装置(12,12a,12b,12c,12d)に搭載される正常モータに対する電流値(Iy)を上昇させる調整制御を行うことを特徴とする請求項1に記載の車両の制動制御装置。
【請求項3】
前記モータ制御手段(15、S23,S26,S31)は、前記モータ保護制御時に、前記モータ保護制御の実行による車両全体の制動力(BP_all)の減少分を補うように前記正常モータに対する電流値(Ix)が上昇されるように前記調整制御を行うことを特徴とする請求項2に記載の車両の制動制御装置。
【請求項4】
前記モータ制御手段(15、S23,S31)は、前記モータ保護制御及び前記調整制御を行う場合、前記第2の車輪(Y)を含む前記第1の車輪(Y)以外の全ての車輪に対する制動力を調整することを特徴とする請求項2に記載の車両の制動制御装置。
【請求項5】
前記モータ保護制御及び前記調整制御の実行によって車両に生じるヨーレートの推定値(YR2)を取得するヨーレート取得手段(15、S29)をさらに備え、
前記モータ制御手段(15、S23,S26,S30,S31)は、前記モータ保護制御及び前記調整制御を行う場合に、前記ヨーレート取得手段(15、S29)によって取得されたヨーレートの推定値(YR2)が「0(零)」に近づくように前記各車輪(FR,FL,RR,RL)のうち前記第1及び第2の各車輪(X,Y)以外の他の車輪に対する制動力を調整すべく、該他の車輪に制動力を付与するための電動ブレーキ装置(12,12a,12b,12c,12d)に搭載されるモータ(21)を制御することを特徴とする請求項4に記載の車両の制動制御装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−75544(P2013−75544A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−214947(P2011−214947)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]