
車両の制動灯制御装置
【課題】本発明は、坂路でも確実に後続車へ注意喚起することのできる電気自動車の制動灯制御装置を提供する。
【解決手段】回生ブレーキが作動すると(S10)、車速センサにて検出される車速の変化に基づいて、車両減速度演算部にて車両減速度を演算し(S12)、アクセルポジションセンサにて検出されるアクセル開度から演算されるドライバの要求トルクと現在の車両の実トルクとの差、及び車速センサにて検出される車速に基づいて、坂路勾配角演算部にて路面勾配角を演算する(S14)。次に、車両減速度を路面勾配角で減速度補正部にて補正し、勾配角補正減速度を演算する(S16)。そして、当該勾配角補正減速度が所定値より大きければ、ストップランプ21を点灯させる(S18,S20)。
【解決手段】回生ブレーキが作動すると(S10)、車速センサにて検出される車速の変化に基づいて、車両減速度演算部にて車両減速度を演算し(S12)、アクセルポジションセンサにて検出されるアクセル開度から演算されるドライバの要求トルクと現在の車両の実トルクとの差、及び車速センサにて検出される車速に基づいて、坂路勾配角演算部にて路面勾配角を演算する(S14)。次に、車両減速度を路面勾配角で減速度補正部にて補正し、勾配角補正減速度を演算する(S16)。そして、当該勾配角補正減速度が所定値より大きければ、ストップランプ21を点灯させる(S18,S20)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の制動灯制御装置に係り、詳しくは、勾配における制動灯の点灯制御に関する。
【背景技術】
【0002】
従来、モータ(電動機)にて駆動される電気自動車において安全性の向上として、アクセルを放したことによる減速、所謂、回生ブレーキによる減速時に、車両後方のストップランプ(制動灯)を点灯させて後続車に自車の減速を知らせるようにして、後続車への注意喚起を行うようにしている。その手法として、回生ブレーキ時の回生電流を検出することにより減速を検出し制動灯を点灯させる方法(特許文献1)や、電動機を作動させる電源の電圧が所定電圧以下である時に減速を検出し、制動灯を点灯させる方法(特許文献2)が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】実開平7−9002号公報
【特許文献2】実開昭63−149104号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1及び2の技術では、車両が坂路を走行すると坂路の影響を受け、登坂時には登坂による減速も加わり制動灯が平坦路と比較して点灯しやすくなり後続車が煩わしく感じたり、降坂時には降坂により加速するため平坦路と比較して点灯しにくくなったりして、後続車への注意喚起が十分にできない虞があり好ましいことではない。
【0005】
本発明は、この様な問題を解決するためになされたもので、その目的とするところは、坂路でも確実に後続車へ注意喚起し、また、後続車が煩わしく感じることを防止することのできる車両の制動灯制御装置を提供することにある。
【課題を解決するための手段】
【0006】
上記の目的を達成するために、請求項1の車両の制動灯制御装置では、車両の減速時に後続車に減速を知らせる制動灯を有する車両の制動灯制御装置において、前記車両の減速度を演算する車両減速度演算手段と、前記車両が走行している道路の勾配角を演算する勾配角演算手段と、前記制動灯の点灯を制御する制御手段とを備え、前記制御手段は、前記減速度演算手段にて演算される前記減速度を前記勾配角演算手段にて演算される前記勾配角にて補正して勾配角補正減速度を演算し、更に前記勾配角補正減速度が所定値より大きい場合に前記制動灯を点灯させることを特徴とする。
【0007】
また、請求項2の車両の制動灯制御装置では、請求項1において、前記車両減速度演算手段は、前記車両の車速を検出する車速検出手段と、前記車速検出手段にて検出される前記車速から減速度を演算する減速度演算手段とで構成されることを特徴とする。
また、請求項3の車両の制動灯制御装置では、請求項1または請求項2において、前記車両は、電動機により駆動される電動車両であって、前記制動手段は、回生制動が開始されると、前記減速度演算手段にて演算される前記減速度を前記勾配角演算手段にて演算される前記勾配角にて補正して勾配角補正減速度を演算し、更に前記勾配角補正減速度が所定値より大きい場合に前記制動灯を点灯させることを特徴とする。
【0008】
また、請求項4の車両の制動灯制御装置では、請求項3において、前記車両減速度演算手段は、前記電動車両の回生エネルギーを検出する回生エネルギー検出手段と、前記回生エネルギー検出手段にて検出される前記回生エネルギー量から減速度を演算する減速度演算手段とで構成されることを特徴とする。
【発明の効果】
【0009】
請求項1の発明によれば、車両減速度演算手段にて演算される減速度を勾配角演算手段にて演算される勾配角にて補正して勾配角補正減速度を演算し、勾配角補正減速度が所定値より大きい場合に制動灯を点灯させるようにしている。
このように、減速度を勾配角にて補正しているので坂路であっても、車両への坂路の影響を無くし、平坦路走行における回生制動時と同様の減速度にて制動灯を点灯させることができる。
【0010】
従って、坂路による影響を無くし制動灯を点灯させることができるので、降坂路であっても後続車に確実に注意喚起することができ、また、登坂路であっても後続車が前走車の制動灯を煩わしく感じることを防止することができる。
また、請求項2の発明によれば、車両減速度演算手段は、車両の車速を検出する車速検出手段と、車速検出手段にて検出される車速から減速度を演算する減速度演算手段とで構成されており、車両に搭載される既存の検出手段により減速度を演算することができるので、簡単な構成としてコストの増加を抑制し、坂路であっても後続車への確実な注意喚起及び煩わしく感じさせることを防止することができる。
【0011】
また、請求項3の発明によれば、車両を電動機により駆動される電動車両とし、回生制動が開始されると、減速度を勾配角にて補正し勾配角補正減速度を演算し、勾配角補正減速度が所定値よりも大きい場合に制動灯を点灯させることができるので、簡単な構成としてコストの増加を抑制し、電動車両であっても坂路であっても後続車への確実な注意喚起及び煩わしく感じさせることを防止することができる。
【0012】
また、請求項4の発明によれば、車両減速度演算手段は、電動車両の回生エネルギーを検出する回生エネルギー検出手段と、回生エネルギー検出手段にて検出される回生エネルギー量から減速度を演算する減速度演算手段とで構成されており、電動車両に搭載される既存の検出手段により減速度を演算することができるので、簡単な構成としてコストの増加を抑制し、坂路であっても後続車への確実な注意喚起及び煩わしく感じさせることを防止することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態に係る電気自動車の制動灯制御装置の概略構成図である。
【図2】本発明の実施形態に係る電気自動車の制動灯制御装置のストップランプ点灯制御の制御ルーチンを示すフローチャートである。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態を図面に基づき説明する。
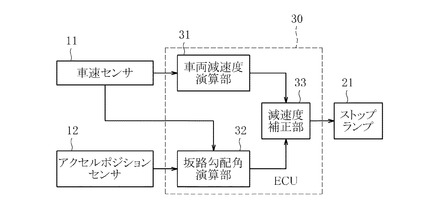
図1は、本発明の実施形態に係る電気自動車の制動灯制御装置の概略構成図である。以下、電気自動車の制動灯制御装置の構成を説明する。
本実施形態の車両は、当該車両の走行装置として、バッテリより電力が供給されインバータにより制御されるモータ(電動機)を備える電気自動車である。
【0015】
図1に示すように、本実施形態の電気自動車の制動灯制御装置は、例えば車輪速度から車両の車速を検出する車速センサ(車速検出手段)11と、アクセルの開き度合いを検出するアクセルポジションセンサ12と、機械式ブレーキ或いはモータの回生ブレーキの作動に応じて後続車にブレーキの作動を注意喚起するストップランプ(制動灯)21及び、車両の総合的な制御を行うための制御装置であって、入出力装置、記憶装置(ROM、RAM、不揮発性RAM等)及び中央演算処理装置(CPU)等を含んで構成される電子コントロールユニット(以下、ECUという)30とで構成されている。
【0016】
ECU30は、車両の総合的な制御を行うための制御装置であり、入出力装置、記憶装置(ROM、RAM、不揮発性RAM等)、中央演算処理装置(CPU)及びタイマ等を含んで構成される。
ECU30の入力側には、上記車速センサ11及びアクセルポジションセンサ12が接続されており、これらのセンサ類からの検出情報が入力される。
【0017】
一方、ECU30の出力側には、上記ストップランプ21が接続されている。
ECU30は、車速センサ11からの検出情報に基づいて、現在の車両の減速度を演算する車両減速度演算部(減速度演算手段)31と、車速センサ11からの検出情報及びアクセルポジションセンサ12からの検出情報に基づいて坂路の勾配角を演算する坂路勾配角演算部(勾配角演算手段)32と、現在の車両の減速度と坂路の勾配角に基づいて、平坦路走行時の減速度に相当する勾配角補正減速度を演算する減速度補正部(制御手段)33とで構成されている
以下、このように構成された本発明の実施形態に係るECU30でのストップランプ点灯制御について説明する。
【0018】
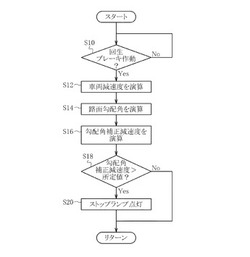
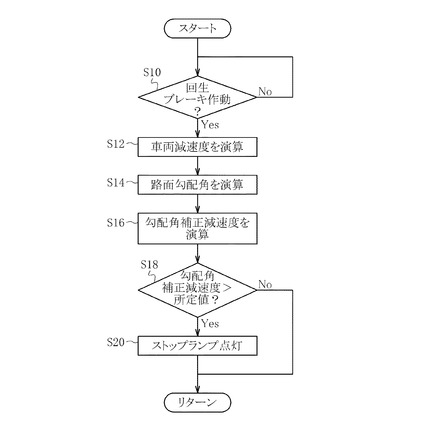
図2は、ECU30の実行する本発明の実施形態に係る電気自動車の制動灯制御装置のストップランプ点灯制御の制御ルーチンを示すフローチャートである。
図2に示すように、ステップS10では、回生ブレーキが作動したか否かを判別する。詳しくは、ドライバがアクセルペダルの操作をやめ、アクセルポジションセンサ12にて検出されるアクセル開度が全閉となっているか、否かを判定する。判別結果が真(Yes)でアクセルポジションセンサ12にて検出されるアクセル開度が全閉となっており、回生ブレーキが作動していれば、ステップS12に進む。判別結果が偽(No)でアクセルポジションセンサ12にて検出されるアクセル開度が全閉でなく、回生ブレーキが作動していなければ、ステップS10へ戻り再度判別する。
【0019】
ステップS12では、車速センサ11にて検出される車速の変化に基づいて、車両減速度演算部31にて車両減速度を演算する。そして、ステップS14に進む。
ステップS14では、アクセルポジションセンサ12にて検出されるアクセル開度から演算されるドライバの要求トルク(回生ブレーキ作動中であるためアクセル開度は全閉でありドライバ要求トルクは0)と、車速センサ11にて検出される車速より演算される現在の車両の実トルクとに基づいて、坂路勾配角演算部32にて路面勾配角を演算する。そして、ステップS16に進む。
【0020】
ステップS16では、車両減速度演算部31にて演算される車両減速度を坂路勾配角演算部32にて演算される路面勾配角で減速度補正部33にて補正し、平坦路走行時の減速度に相当する勾配角補正減速度を演算する。そして、ステップS18に進む。
ステップS18では、減速度補正部33にて演算された勾配角補正減速度が所定値より大きいか否かを判別する。判別結果が真(Yes)で勾配角補正減速度が所定値より大きければ、ステップS20に進む。判別結果が偽(No)で勾配角補正減速度が所定値以下であれば、本ルーチンをリターンする。
【0021】
ステップS20では、ストップランプ21を点灯させ、本ルーチンをリターンする。
以上のように、本発明の実施形態に係る電気自動車の制動灯制御装置によれば、回生ブレーキが作動すると、車速センサ11にて検出される車速の変化に基づいて、車両減速度演算部31にて車両減速度を演算し、アクセルポジションセンサ12にて検出されるアクセル開度から演算されるドライバの要求トルクと現在の車両の実トルクとの差、及び車速センサ11にて検出される車速に基づいて、坂路勾配角演算部32にて路面勾配角を演算する。次に、車両減速度を路面勾配角で減速度補正部33にて補正し、勾配角補正減速度を演算する。そして、当該勾配角補正減速度が所定値より大きければ、ストップランプ21を点灯させるようにしている。
【0022】
このように、車両減速度演算部31にて演算された車両減速度を、当該車両の走行している坂路の勾配角である路面勾配角で補正しているので、坂路であっても平坦路走行における回生制動時と同様の減速度にてストップランプ21を点灯させることができる。
例えば、車両は登坂時には登坂による減速が加わるが、後続車も登坂により減速し易くなるので、単純に当該車両の車両減速度からストップランプ21を点灯させた場合には、後続車に対する当該車両の相対減速度が低下しなくともストップランプ21が点灯される場合があり、後続車にとって煩わしさを与える虞がある。
【0023】
また、降坂時には降坂により加速するが、後続車も降坂により加速し易いので、単純に車両減速度からストップランプ21を点灯させた場合には、後続車に対して当該車両の相対減速度が所定以上になっても、ストップランプ21が点灯されない場合がある。
本実施形態では、上記のように坂路による影響を無くし平坦路走行における回生制動時と同様の減速度に換算してストップランプ21を点灯させることができるので、坂路であっても平坦路と同様に後続車に対して注意喚起することができ、特に降坂時に確実に後続車に注意を促し、安全性を高めることができる。
【0024】
また、車両の減速度を車速センサ11にて検出される車速より演算しているので、新たに減速度を検出するセンサ類を追加する必要がないので、簡単な構成としてコストの増加を抑制することができる。
以上で発明の実施形態の説明を終えるが、本発明の形態は上記実施形態に限定されるものではない。
【0025】
例えば、上記実施形態では、車両の減速度を車速センサ11にて検出される車速より演算をするようにしているが、これに限定されるものではなく、例えば、加速度センサや車輪速センサ等を用いて減速度を検出するようにしても良く、この場合でも後続車に確実に注意喚起を行うことができる。また、例えば回生ブレーキ時の回生電流を検出することにより、車両の回生エネルギー量を検出し(回生エネルギー検出手段)、この回生エネルギー量を用いて車両の減速度を演算するようにしてもよい。
【0026】
また、本実施例では、回生ブレーキが作動する電気自動車またはハイブリッド自動車という所謂電動車両についての説明をしたが、回生ブレーキの作動有無に関係なく内燃機関を駆動源とするガソリン車においても、車速センサ、加速度センサや車輪速センサより減速度を検出するようにしてもよい。
【符号の説明】
【0027】
11 車速センサ(車速検出手段)
12 アクセルポジションセンサ
21 ストップランプ(制動灯)
30 ECU
31 車両減速度演算部(減速度演算手段)
32 坂路勾配角演算部(勾配角演算手段)
33 減速度補正部(制御手段)
【技術分野】
【0001】
本発明は、車両の制動灯制御装置に係り、詳しくは、勾配における制動灯の点灯制御に関する。
【背景技術】
【0002】
従来、モータ(電動機)にて駆動される電気自動車において安全性の向上として、アクセルを放したことによる減速、所謂、回生ブレーキによる減速時に、車両後方のストップランプ(制動灯)を点灯させて後続車に自車の減速を知らせるようにして、後続車への注意喚起を行うようにしている。その手法として、回生ブレーキ時の回生電流を検出することにより減速を検出し制動灯を点灯させる方法(特許文献1)や、電動機を作動させる電源の電圧が所定電圧以下である時に減速を検出し、制動灯を点灯させる方法(特許文献2)が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】実開平7−9002号公報
【特許文献2】実開昭63−149104号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1及び2の技術では、車両が坂路を走行すると坂路の影響を受け、登坂時には登坂による減速も加わり制動灯が平坦路と比較して点灯しやすくなり後続車が煩わしく感じたり、降坂時には降坂により加速するため平坦路と比較して点灯しにくくなったりして、後続車への注意喚起が十分にできない虞があり好ましいことではない。
【0005】
本発明は、この様な問題を解決するためになされたもので、その目的とするところは、坂路でも確実に後続車へ注意喚起し、また、後続車が煩わしく感じることを防止することのできる車両の制動灯制御装置を提供することにある。
【課題を解決するための手段】
【0006】
上記の目的を達成するために、請求項1の車両の制動灯制御装置では、車両の減速時に後続車に減速を知らせる制動灯を有する車両の制動灯制御装置において、前記車両の減速度を演算する車両減速度演算手段と、前記車両が走行している道路の勾配角を演算する勾配角演算手段と、前記制動灯の点灯を制御する制御手段とを備え、前記制御手段は、前記減速度演算手段にて演算される前記減速度を前記勾配角演算手段にて演算される前記勾配角にて補正して勾配角補正減速度を演算し、更に前記勾配角補正減速度が所定値より大きい場合に前記制動灯を点灯させることを特徴とする。
【0007】
また、請求項2の車両の制動灯制御装置では、請求項1において、前記車両減速度演算手段は、前記車両の車速を検出する車速検出手段と、前記車速検出手段にて検出される前記車速から減速度を演算する減速度演算手段とで構成されることを特徴とする。
また、請求項3の車両の制動灯制御装置では、請求項1または請求項2において、前記車両は、電動機により駆動される電動車両であって、前記制動手段は、回生制動が開始されると、前記減速度演算手段にて演算される前記減速度を前記勾配角演算手段にて演算される前記勾配角にて補正して勾配角補正減速度を演算し、更に前記勾配角補正減速度が所定値より大きい場合に前記制動灯を点灯させることを特徴とする。
【0008】
また、請求項4の車両の制動灯制御装置では、請求項3において、前記車両減速度演算手段は、前記電動車両の回生エネルギーを検出する回生エネルギー検出手段と、前記回生エネルギー検出手段にて検出される前記回生エネルギー量から減速度を演算する減速度演算手段とで構成されることを特徴とする。
【発明の効果】
【0009】
請求項1の発明によれば、車両減速度演算手段にて演算される減速度を勾配角演算手段にて演算される勾配角にて補正して勾配角補正減速度を演算し、勾配角補正減速度が所定値より大きい場合に制動灯を点灯させるようにしている。
このように、減速度を勾配角にて補正しているので坂路であっても、車両への坂路の影響を無くし、平坦路走行における回生制動時と同様の減速度にて制動灯を点灯させることができる。
【0010】
従って、坂路による影響を無くし制動灯を点灯させることができるので、降坂路であっても後続車に確実に注意喚起することができ、また、登坂路であっても後続車が前走車の制動灯を煩わしく感じることを防止することができる。
また、請求項2の発明によれば、車両減速度演算手段は、車両の車速を検出する車速検出手段と、車速検出手段にて検出される車速から減速度を演算する減速度演算手段とで構成されており、車両に搭載される既存の検出手段により減速度を演算することができるので、簡単な構成としてコストの増加を抑制し、坂路であっても後続車への確実な注意喚起及び煩わしく感じさせることを防止することができる。
【0011】
また、請求項3の発明によれば、車両を電動機により駆動される電動車両とし、回生制動が開始されると、減速度を勾配角にて補正し勾配角補正減速度を演算し、勾配角補正減速度が所定値よりも大きい場合に制動灯を点灯させることができるので、簡単な構成としてコストの増加を抑制し、電動車両であっても坂路であっても後続車への確実な注意喚起及び煩わしく感じさせることを防止することができる。
【0012】
また、請求項4の発明によれば、車両減速度演算手段は、電動車両の回生エネルギーを検出する回生エネルギー検出手段と、回生エネルギー検出手段にて検出される回生エネルギー量から減速度を演算する減速度演算手段とで構成されており、電動車両に搭載される既存の検出手段により減速度を演算することができるので、簡単な構成としてコストの増加を抑制し、坂路であっても後続車への確実な注意喚起及び煩わしく感じさせることを防止することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態に係る電気自動車の制動灯制御装置の概略構成図である。
【図2】本発明の実施形態に係る電気自動車の制動灯制御装置のストップランプ点灯制御の制御ルーチンを示すフローチャートである。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態を図面に基づき説明する。
図1は、本発明の実施形態に係る電気自動車の制動灯制御装置の概略構成図である。以下、電気自動車の制動灯制御装置の構成を説明する。
本実施形態の車両は、当該車両の走行装置として、バッテリより電力が供給されインバータにより制御されるモータ(電動機)を備える電気自動車である。
【0015】
図1に示すように、本実施形態の電気自動車の制動灯制御装置は、例えば車輪速度から車両の車速を検出する車速センサ(車速検出手段)11と、アクセルの開き度合いを検出するアクセルポジションセンサ12と、機械式ブレーキ或いはモータの回生ブレーキの作動に応じて後続車にブレーキの作動を注意喚起するストップランプ(制動灯)21及び、車両の総合的な制御を行うための制御装置であって、入出力装置、記憶装置(ROM、RAM、不揮発性RAM等)及び中央演算処理装置(CPU)等を含んで構成される電子コントロールユニット(以下、ECUという)30とで構成されている。
【0016】
ECU30は、車両の総合的な制御を行うための制御装置であり、入出力装置、記憶装置(ROM、RAM、不揮発性RAM等)、中央演算処理装置(CPU)及びタイマ等を含んで構成される。
ECU30の入力側には、上記車速センサ11及びアクセルポジションセンサ12が接続されており、これらのセンサ類からの検出情報が入力される。
【0017】
一方、ECU30の出力側には、上記ストップランプ21が接続されている。
ECU30は、車速センサ11からの検出情報に基づいて、現在の車両の減速度を演算する車両減速度演算部(減速度演算手段)31と、車速センサ11からの検出情報及びアクセルポジションセンサ12からの検出情報に基づいて坂路の勾配角を演算する坂路勾配角演算部(勾配角演算手段)32と、現在の車両の減速度と坂路の勾配角に基づいて、平坦路走行時の減速度に相当する勾配角補正減速度を演算する減速度補正部(制御手段)33とで構成されている
以下、このように構成された本発明の実施形態に係るECU30でのストップランプ点灯制御について説明する。
【0018】
図2は、ECU30の実行する本発明の実施形態に係る電気自動車の制動灯制御装置のストップランプ点灯制御の制御ルーチンを示すフローチャートである。
図2に示すように、ステップS10では、回生ブレーキが作動したか否かを判別する。詳しくは、ドライバがアクセルペダルの操作をやめ、アクセルポジションセンサ12にて検出されるアクセル開度が全閉となっているか、否かを判定する。判別結果が真(Yes)でアクセルポジションセンサ12にて検出されるアクセル開度が全閉となっており、回生ブレーキが作動していれば、ステップS12に進む。判別結果が偽(No)でアクセルポジションセンサ12にて検出されるアクセル開度が全閉でなく、回生ブレーキが作動していなければ、ステップS10へ戻り再度判別する。
【0019】
ステップS12では、車速センサ11にて検出される車速の変化に基づいて、車両減速度演算部31にて車両減速度を演算する。そして、ステップS14に進む。
ステップS14では、アクセルポジションセンサ12にて検出されるアクセル開度から演算されるドライバの要求トルク(回生ブレーキ作動中であるためアクセル開度は全閉でありドライバ要求トルクは0)と、車速センサ11にて検出される車速より演算される現在の車両の実トルクとに基づいて、坂路勾配角演算部32にて路面勾配角を演算する。そして、ステップS16に進む。
【0020】
ステップS16では、車両減速度演算部31にて演算される車両減速度を坂路勾配角演算部32にて演算される路面勾配角で減速度補正部33にて補正し、平坦路走行時の減速度に相当する勾配角補正減速度を演算する。そして、ステップS18に進む。
ステップS18では、減速度補正部33にて演算された勾配角補正減速度が所定値より大きいか否かを判別する。判別結果が真(Yes)で勾配角補正減速度が所定値より大きければ、ステップS20に進む。判別結果が偽(No)で勾配角補正減速度が所定値以下であれば、本ルーチンをリターンする。
【0021】
ステップS20では、ストップランプ21を点灯させ、本ルーチンをリターンする。
以上のように、本発明の実施形態に係る電気自動車の制動灯制御装置によれば、回生ブレーキが作動すると、車速センサ11にて検出される車速の変化に基づいて、車両減速度演算部31にて車両減速度を演算し、アクセルポジションセンサ12にて検出されるアクセル開度から演算されるドライバの要求トルクと現在の車両の実トルクとの差、及び車速センサ11にて検出される車速に基づいて、坂路勾配角演算部32にて路面勾配角を演算する。次に、車両減速度を路面勾配角で減速度補正部33にて補正し、勾配角補正減速度を演算する。そして、当該勾配角補正減速度が所定値より大きければ、ストップランプ21を点灯させるようにしている。
【0022】
このように、車両減速度演算部31にて演算された車両減速度を、当該車両の走行している坂路の勾配角である路面勾配角で補正しているので、坂路であっても平坦路走行における回生制動時と同様の減速度にてストップランプ21を点灯させることができる。
例えば、車両は登坂時には登坂による減速が加わるが、後続車も登坂により減速し易くなるので、単純に当該車両の車両減速度からストップランプ21を点灯させた場合には、後続車に対する当該車両の相対減速度が低下しなくともストップランプ21が点灯される場合があり、後続車にとって煩わしさを与える虞がある。
【0023】
また、降坂時には降坂により加速するが、後続車も降坂により加速し易いので、単純に車両減速度からストップランプ21を点灯させた場合には、後続車に対して当該車両の相対減速度が所定以上になっても、ストップランプ21が点灯されない場合がある。
本実施形態では、上記のように坂路による影響を無くし平坦路走行における回生制動時と同様の減速度に換算してストップランプ21を点灯させることができるので、坂路であっても平坦路と同様に後続車に対して注意喚起することができ、特に降坂時に確実に後続車に注意を促し、安全性を高めることができる。
【0024】
また、車両の減速度を車速センサ11にて検出される車速より演算しているので、新たに減速度を検出するセンサ類を追加する必要がないので、簡単な構成としてコストの増加を抑制することができる。
以上で発明の実施形態の説明を終えるが、本発明の形態は上記実施形態に限定されるものではない。
【0025】
例えば、上記実施形態では、車両の減速度を車速センサ11にて検出される車速より演算をするようにしているが、これに限定されるものではなく、例えば、加速度センサや車輪速センサ等を用いて減速度を検出するようにしても良く、この場合でも後続車に確実に注意喚起を行うことができる。また、例えば回生ブレーキ時の回生電流を検出することにより、車両の回生エネルギー量を検出し(回生エネルギー検出手段)、この回生エネルギー量を用いて車両の減速度を演算するようにしてもよい。
【0026】
また、本実施例では、回生ブレーキが作動する電気自動車またはハイブリッド自動車という所謂電動車両についての説明をしたが、回生ブレーキの作動有無に関係なく内燃機関を駆動源とするガソリン車においても、車速センサ、加速度センサや車輪速センサより減速度を検出するようにしてもよい。
【符号の説明】
【0027】
11 車速センサ(車速検出手段)
12 アクセルポジションセンサ
21 ストップランプ(制動灯)
30 ECU
31 車両減速度演算部(減速度演算手段)
32 坂路勾配角演算部(勾配角演算手段)
33 減速度補正部(制御手段)
【特許請求の範囲】
【請求項1】
車両の減速時に後続車に減速を知らせる制動灯を有する車両の制動灯制御装置において、
前記車両の減速度を演算する車両減速度演算手段と、
前記車両が走行している道路の勾配角を演算する勾配角演算手段と、
前記制動灯の点灯を制御する制御手段とを備え、
前記制御手段は、
前記減速度演算手段にて演算される前記減速度を前記勾配角演算手段にて演算される前記勾配角にて補正して勾配角補正減速度を演算し、
更に前記勾配角補正減速度が所定値より大きい場合に前記制動灯を点灯させることを特徴とする車両の制動灯制御装置。
【請求項2】
前記車両減速度演算手段は、
前記車両の車速を検出する車速検出手段と、
前記車速検出手段にて検出される前記車速から減速度を演算する減速度演算手段とで構成されることを特徴とする、請求項1に記載の車両の制動灯制御装置。
【請求項3】
前記車両は、電動機により駆動される電動車両であって、
前記制動手段は、回生制動が開始されると、前記減速度演算手段にて演算される前記減速度を前記勾配角演算手段にて演算される前記勾配角にて補正して勾配角補正減速度を演算し、
更に前記勾配角補正減速度が所定値より大きい場合に前記制動灯を点灯させることを特徴とする請求項1または請求項2に記載の車両の制動灯制御装置。
【請求項4】
前記車両減速度演算手段は、
前記電動車両の回生エネルギーを検出する回生エネルギー検出手段と、
前記回生エネルギー検出手段にて検出される前記回生エネルギー量から減速度を演算する減速度演算手段とで構成されることを特徴とする、請求項3に記載の車両の制動灯制御装置。
【請求項1】
車両の減速時に後続車に減速を知らせる制動灯を有する車両の制動灯制御装置において、
前記車両の減速度を演算する車両減速度演算手段と、
前記車両が走行している道路の勾配角を演算する勾配角演算手段と、
前記制動灯の点灯を制御する制御手段とを備え、
前記制御手段は、
前記減速度演算手段にて演算される前記減速度を前記勾配角演算手段にて演算される前記勾配角にて補正して勾配角補正減速度を演算し、
更に前記勾配角補正減速度が所定値より大きい場合に前記制動灯を点灯させることを特徴とする車両の制動灯制御装置。
【請求項2】
前記車両減速度演算手段は、
前記車両の車速を検出する車速検出手段と、
前記車速検出手段にて検出される前記車速から減速度を演算する減速度演算手段とで構成されることを特徴とする、請求項1に記載の車両の制動灯制御装置。
【請求項3】
前記車両は、電動機により駆動される電動車両であって、
前記制動手段は、回生制動が開始されると、前記減速度演算手段にて演算される前記減速度を前記勾配角演算手段にて演算される前記勾配角にて補正して勾配角補正減速度を演算し、
更に前記勾配角補正減速度が所定値より大きい場合に前記制動灯を点灯させることを特徴とする請求項1または請求項2に記載の車両の制動灯制御装置。
【請求項4】
前記車両減速度演算手段は、
前記電動車両の回生エネルギーを検出する回生エネルギー検出手段と、
前記回生エネルギー検出手段にて検出される前記回生エネルギー量から減速度を演算する減速度演算手段とで構成されることを特徴とする、請求項3に記載の車両の制動灯制御装置。
【図1】


【図2】
【図2】
【公開番号】特開2012−153294(P2012−153294A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−15252(P2011−15252)
【出願日】平成23年1月27日(2011.1.27)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月27日(2011.1.27)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
[ Back to top ]