
車両の制御システム
【課題】EV走行モードからの切り替えを運転者に対して十分に促すこと。
【解決手段】エンジン10の動力を用いたエンジン走行モード、モータ/ジェネレータ20の動力を用いたEV走行モード、又はエンジン10及びモータ/ジェネレータ20の双方の動力を用いたハイブリッド走行モード、を運転者に手動で選択させる走行モード選択装置と、運転者が走行モード選択装置によりEV走行モードを選択した際の車速に応じてモータ/ジェネレータ20の出力特性を設定し、モータ/ジェネレータ20よりもエンジン10の運転効率の方が優れているときに当該モータ/ジェネレータ20からの出力を抑制又は禁止するハイブリッドECU100及びモータ/ジェネレータECU102と、を備えること。
【解決手段】エンジン10の動力を用いたエンジン走行モード、モータ/ジェネレータ20の動力を用いたEV走行モード、又はエンジン10及びモータ/ジェネレータ20の双方の動力を用いたハイブリッド走行モード、を運転者に手動で選択させる走行モード選択装置と、運転者が走行モード選択装置によりEV走行モードを選択した際の車速に応じてモータ/ジェネレータ20の出力特性を設定し、モータ/ジェネレータ20よりもエンジン10の運転効率の方が優れているときに当該モータ/ジェネレータ20からの出力を抑制又は禁止するハイブリッドECU100及びモータ/ジェネレータECU102と、を備えること。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、機械エネルギを動力とする機械動力源と電気エネルギを変換した機械エネルギを動力とする電気動力源とを備え、機械動力源を用いたエンジン走行モードと、電気動力源を用いたEV走行モードと、機械動力源及び電気動力源を用いたハイブリッド走行モードと、を手動で切り替えさせる車両の制御システムに関する。
【背景技術】
【0002】
従来、動力源として機械動力源と電気動力源とを備えた車両が知られている。例えば、下記の特許文献1には、運転者の運転意図(要求トルクの変化率)に対するエンジン(機械動力源)とモータ(電気動力源)の夫々の特性を生かした最適なトルク分配率を設定し、そのトルク分配率でエンジンとモータを最適に制御する技術が開示されている。尚、下記の特許文献2には、自動マニュアル変速機が搭載されたハイブリッド車両において、モータで発進させ、所定車速以上でエンジンにより走行させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−050877号公報
【特許文献2】特開2000−272360号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、エンジン走行モード等の走行モード(換言するならば動力源)を車両側が自動的に選択するハイブリッド車両については広く知られている。一方、ハイブリッド車両においては、その走行モードの選択を運転者に任せるものも考えられる。しかしながら、この種のハイブリッド車両においては、運転者が今現在又はこれからの車速等の走行条件に基づいて運転効率の良い動力源による走行モードを選択する必要があるのだが、そのような選択を運転者に委ねることは現実問題として困難である。
【0005】
そこで、本発明は、かかる従来例の有する不都合を改善し、運転効率の良い動力源による走行モードで走行させることが可能な車両の制御システムを提供することを、その目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成する為、本発明は、機械エネルギを動力にして駆動力を発生させる機械動力源の動力を用いたエンジン走行モード、電気エネルギを変換した機械エネルギを動力にして駆動力を発生させる電気動力源の動力を用いたEV走行モード、又は前記機械動力源及び前記電気動力源の双方の動力を用いたハイブリッド走行モード、を運転者に手動で選択させる走行モード選択装置と、運転者が前記走行モード選択装置により前記EV走行モードを選択した際の車速に応じて前記電気動力源の出力特性を設定し、該電気動力源よりも前記機械動力源の運転効率の方が優れているときに当該電気動力源からの出力を抑制又は禁止する電気動力源制御装置と、を備えることを特徴としている。
【0007】
ここで、前記電気動力源制御装置は、前記EV走行モードでの走行中に変化した車速に応じて、前記電気動力源の出力特性を前記EV走行モードの選択時の出力特性から変更することが望ましい。
【0008】
また、前記電気動力源制御装置は、夫々の前記出力特性における前記電気動力源の出力の交点で出力特性の変更を行うことが望ましい。
【発明の効果】
【0009】
本発明に係る車両の制御システムは、運転者に選択されてEV走行を行う場合、電気動力源よりも機械動力源の方が運転効率に優れ、燃費性能が良いと判ったならば、電気動力源からの出力を抑制又は禁止することで、運転者のアクセル操作と車両の動きとを一致させ難くする。この制御システムにおいては、これにより運転者に違和感を与え、EV走行モードからエンジン走行モードやハイブリッド走行モードへの切り替え操作を促す。従って、運転者がEV走行モードからエンジン走行モードやハイブリッド走行モードに切り替える可能性が高くなるので、この制御システムは、運転効率の良い機械動力源を使った走行モードで車両を走行させることができる。
【図面の簡単な説明】
【0010】
【図1】図1は、本発明に係る車両の制御システムが適用されるハイブリッド車両の一例を示す図である。
【図2】図2は、走行モード選択装置の一例を示すニュートラル状態選択時の図である。
【図3】図3は、走行モード選択装置の一例を示すEV走行モード選択時の図である。
【図4】図4は、発進時(低車速時)におけるEV走行モードのモータ/ジェネレータの出力特性マップの一例を示す図である。
【図5】図5は、中車速時におけるEV走行モードのモータ/ジェネレータの出力特性マップの一例を示す図である。
【図6】図6は、中車速時の出力特性マップから発進時(低車速時)の出力特性マップへの切り替えの一例について説明する図である。
【図7】図7は、中車速時の出力特性マップから発進時(低車速時)の出力特性マップへの切り替えの他の例について説明する図である。
【発明を実施するための形態】
【0011】
以下に、本発明に係る車両の制御システムの実施例を図面に基づいて詳細に説明する。尚、この実施例によりこの発明が限定されるものではない。
【0012】
[実施例]
本発明に係る車両の制御システムの実施例を図1から図7に基づいて説明する。
【0013】
本発明に係る制御システムの適用対象たる車両とは、機械エネルギを動力とする機械動力源と電気エネルギを変換した機械エネルギを動力とする電気動力源とを備え、機械動力源の動力のみを用いたエンジン走行モードと、電気動力源の動力のみを用いたEV走行モードと、機械動力源及び電気動力源の双方の動力を用いたハイブリッド走行モードと、を運転者が手動で切り替えることの可能なハイブリッド車両である。
【0014】
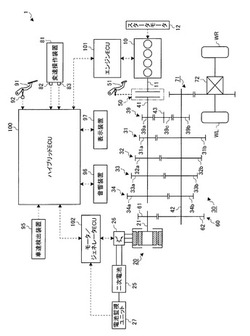
最初に、このハイブリッド車両の一例について図1を用いて説明する。この図1の符号1は、本実施例のハイブリッド車両を示す。
【0015】
このハイブリッド車両1は、機械動力源として、出力軸(クランクシャフト)11から機械的な動力(エンジントルク)を出力するエンジン10を備える。そのエンジン10としては、内燃機関や外燃機関等が考えられる。このエンジン10は、その動作がエンジン用の電子制御装置(以下、「エンジンECU」という。)101によって制御される。このエンジン10には、エンジンECU101によって始動時に駆動制御されるスタータモータ12が設けられている。ここでは、そのエンジンECU101と後述するハイブリッドECU100のエンジン制御に係る機能とによってエンジン制御装置(機械動力源制御装置)が構成される。
【0016】
また、このハイブリッド車両1は、電気動力源として、モータ、力行駆動可能なジェネレータ又は力行及び回生の双方の駆動が可能なモータ/ジェネレータを備える。ここでは、モータ/ジェネレータ20を例に挙げて説明する。このモータ/ジェネレータ20は、例えば永久磁石型交流同期電動機として構成されたものであり、その動作がモータ/ジェネレータ用の電子制御装置(以下、「モータ/ジェネレータECU」という。)102によって制御される。ここでは、そのモータ/ジェネレータECU102と後述するハイブリッドECU100のモータ/ジェネレータ制御に係る機能とによってモータ/ジェネレータ制御装置(電気動力源制御装置)が構成される。力行駆動時には、モータ(電動機)として機能して、二次電池25とインバータ26を介して供給された電気エネルギを機械エネルギに変換し、回転軸21から機械的な動力(モータ力行トルク)を出力する。一方、回生駆動時には、ジェネレータ(発電機)として機能して、回転軸21から機械的な動力(モータ回生トルク)が入力された際に機械エネルギを電気エネルギに変換し、インバータ26を介して電力として二次電池25に蓄える。
【0017】
このハイブリッド車両1には、その二次電池25の充電状態(SOC:state of charge)を検出する電池監視ユニット27が設けられている。その電池監視ユニット27は、検出した二次電池25の充電状態に係る信号(換言するならば、充電状態量(SOC量)に関する信号)をモータ/ジェネレータECU102に送信する。そのモータ/ジェネレータECU102は、その信号に基づいて二次電池25の充電状態の判定を行い、その二次電池25の充電の要否を判定する。
【0018】
また、このハイブリッド車両1は、有段の手動変速機30等からなる動力伝達装置を備えている。その動力伝達装置は、エンジン10やモータ/ジェネレータ20の動力(エンジントルクやモータ力行トルク)を駆動力として駆動輪WL,WRに伝えるものである。
【0019】
手動変速機30には、エンジントルクが入力される入力軸41と、この入力軸41に対して間隔を空けて平行に配置され、駆動輪WL,WR側にトルクを出力する出力軸42と、が設けられている。
【0020】
その入力軸41には、クラッチ50を介してエンジントルクが入力される。そのクラッチ50は、エンジン10の出力軸11と入力軸41とを係合させる係合状態と、その出力軸11と入力軸41とを係合状態から解放(非係合)させる解放状態(非係合状態)と、の切り替えができるように構成された例えば摩擦クラッチ装置である。ここで言う係合状態とは、その出力軸11と入力軸41との間でのトルクの伝達が可能な状態のことであり、解放状態(非係合状態)とは、その出力軸11と入力軸41との間でのトルクの伝達が行えない状態のことである。このクラッチ50は、その係合状態と解放状態の切り替え動作が運転者のクラッチペダル51の操作に従いリンク機構やワイヤー等を介して機械的に行われるものである。
【0021】
本実施例においては、その出力軸42にEVギアとしての歯車対60を介してモータ/ジェネレータ20を連結する。その歯車対60は、互いに噛み合い状態にある第1ギア61と第2ギア62とで構成する。その第1ギア61は、モータ/ジェネレータ20の回転軸21に一体となって回転するよう取り付ける。一方、第2ギア62は、その第1ギア61よりも大径に成形し、手動変速機30の出力軸42に一体となって回転するよう取り付ける。これにより、この歯車対60は、モータ/ジェネレータ20の回転軸21側からトルクが入力されることによって減速装置として動作する一方、手動変速機30の出力軸42側から回転トルクが入力されることによって増速装置として動作する。従って、そのモータ/ジェネレータ20を力行駆動させたときには、モータ力行トルクが減速装置として機能する歯車対60を介して手動変速機30に伝わる。これに対して、このモータ/ジェネレータ20を回生駆動させたときには、増速装置として機能する歯車対60を介して手動変速機30の出力軸42からの出力トルクがモータ/ジェネレータ20のロータに伝達される。ここで、その歯車対60は、後述するシフトレバー81aがシフトゲージ81b上のどの位置にあっても、つまり変速位置1〜4,R、EV走行モード選択位置EV又はニュートラル位置にあっても、噛み合い状態になっているものとする。尚、モータ/ジェネレータ20は、この歯車対60を介さずに、回転軸21を手動変速機30の出力軸42に直接連結してもよい。
【0022】
更に、ここで例示する手動変速機30は、前進4段、後退1段の変速段を有するものであって、前進用の変速段として第1速ギア段31,第2速ギア段32,第3速ギア段33及び第4速ギア段34を備え、且つ、後退用の変速段として後退ギア段39を備えている。前進用の変速段は、変速比が第1速ギア段31,第2速ギア段32,第3速ギア段33,第4速ギア段34の順に小さくなるよう構成している。尚、図1の手動変速機30はその構成を簡易的に説明したものであり、各変速段の配置については、必ずしも図1の態様になるとは限らない。
【0023】
本実施例の動力伝達装置においては、クラッチ50を係合状態にすることで、入力軸41に入力されたエンジントルクが各変速段(ギア段31〜34,39)の内の何れか1つで変速されて出力軸42に伝わる。また、この動力伝達装置においては、モータ力行トルクが歯車対60を介して出力軸42に伝わる。この動力伝達装置においては、その出力軸42から出力されたトルクが最終減速機構71で減速され、差動機構72を介して駆動力として駆動輪WL,WRに伝達される。
【0024】
ここで、第1速ギア段31は、互いに噛み合い状態にある第1速ドライブギア31aと第1速ドリブンギア31bの歯車対で構成する。その第1速ドライブギア31aは、入力軸41上に配置される一方、第1速ドリブンギア31bは、出力軸42上に配置される。第2速ギア段32から第4速ギア段34についても、第1速ギア段31と同様の第2速ドライブギア32a〜第4速ドライブギア34aと第2速ドリブンギア32b〜第4速ドリブンギア34bを有する。
【0025】
一方、後退ギア段39については、後退ドライブギア39aと後退ドリブンギア39bと後退中間ギア39cとで構成する。その後退ドライブギア39aは、入力軸41上に配置され、後退ドリブンギア39bは、出力軸42上に配置される。また、後退中間ギア39cは、後退ドライブギア39a及び後退ドリブンギア39bと噛み合い状態にあり、回転軸43上に配置される。
【0026】
この手動変速機30の構成においては、各変速段のドライブギアの内の何れかが入力軸41と一体になって回転するように配設される一方、残りのドライブギアが入力軸41に対して相対回転するように配設される。また、各変速段のドリブンギアは、その内の何れかが出力軸42と一体になって回転するように配設される一方、残りが出力軸42に対して相対回転するように配設される。
【0027】
また、入力軸41や出力軸42には、運転者の変速操作に従って軸線方向に移動するスリーブ(図示略)が配設されている。入力軸41上のスリーブは、その入力軸41と相対回転可能な2つの変速段の各ドライブギアの間に配置される。一方、出力軸42上のスリーブは、その出力軸42と相対回転可能な2つの変速段の各ドリブンギアの間に配置される。このスリーブは、変速操作装置81を運転者が操作した際に、その変速操作装置81に連結されている図示しないリンク機構やフォークを介して軸線方向への移動を行う。そして、移動後のスリーブは、移動された方向に位置する相対回転可能なドライブギアやドリブンギアを入力軸41や出力軸42と一体回転させる。この手動変速機30においては、そのスリーブが運転者の変速操作装置81の変速操作に対応した方向に移動し、これによりその変速操作に応じた変速段への切り替え又はニュートラル状態(つまり入力軸41と出力軸42との間でトルクの伝達が行えない状態)への切り替えが実行される。
【0028】
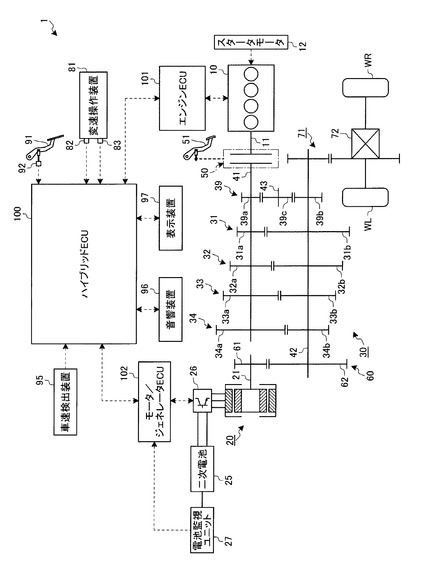
その変速操作装置81は、図2に示す如く、運転者が変速操作する際に使用するシフトレバー81a、このシフトレバー81aを夫々の変速段毎にガイドする所謂シフトゲージ81b、上記のリンク機構やフォーク等を備えている。図2は、手動変速機30をニュートラル状態に操作するときのシフトレバー81aの位置を示している。尚、この図2のシフトゲージ81b上の「1〜4」と「R」は、夫々に第1速ギア段31〜第4速ギア段34と後退ギア段39の変速位置(セレクト位置)を示している。
【0029】
このハイブリッド車両1においては、その走行モードとして、エンジン走行モードとEV走行モードとハイブリッド走行モードとが少なくとも用意されている。
【0030】
このハイブリッド車両1では、シフトレバー81aがシフトゲージ81b上の変速位置1〜4,Rの内の何れかに位置しているときに、エンジン走行モード又はハイブリッド走行モードが選択される。
【0031】
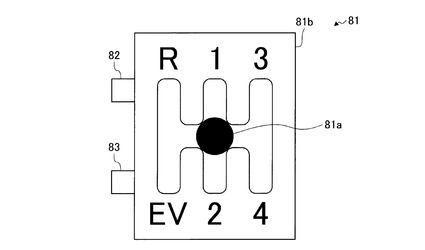
一方、このハイブリッド車両1においては、EV走行モードが選択されるときに運転者によって操作されるEV走行モード切替装置を利用する。ここでは、そのEV走行モード切替装置としての機能を変速操作装置81にもたせることにする。つまり、本実施例の変速操作装置81は、運転者に手動変速機30の変速段を切り替えさせるだけでなく、運転者がEV走行モードに切り替える際のEV走行モード切替装置としての機能も兼ね備えている。例えば、この変速操作装置81は、変速位置1〜4,Rと同様のシフトレバー81aのセレクト位置であって、EV走行モードに切り替える為のEV走行モード選択位置EVをシフトゲージ81b上に備えている。本実施例のハイブリッド車両1においては、シフトレバー81aが図3に示す如くEV走行モード選択位置EVへと操作された際に、手動変速機30がスリーブ等によってニュートラル状態となり、且つ、走行モードがEV走行モードとなる。
【0032】
その変速操作装置81には、シフトレバー81aがEV走行モード選択位置EVに位置しているのか否かを検出するEV走行モード選択位置検出部82が設けられている。このEV走行モード選択位置検出部82とは、例えば、シフトレバー81aが図3に示す如くEV走行モード選択位置EVにあることを検出可能な位置情報検出センサ等である。このEV走行モード選択位置検出部82の検出信号は、車両全体の動作を統括的に制御する電子制御装置(以下、「ハイブリッドECU」という。)100に送信される。
【0033】
そのハイブリッドECU100は、エンジンECU101及びモータ/ジェネレータECU102との間で夫々に各種センサの検出信号や制御指令等の情報の授受ができる。本実施例においては、少なくともそのハイブリッドECU100、エンジンECU101及びモータ/ジェネレータECU102が車両の制御システムの構成要件となっている。
【0034】
また、この変速操作装置81は、シフトレバー81aがシフトゲージ81b上のどの変速位置1〜4,Rにあるのかについて、つまり運転者がどの変速段を選択したのか否かを検出する変速位置検出部83を備えている。その変速位置検出部83は、例えば、シフトレバー81aがどの変速位置1〜4,Rにあるのかを検出可能な位置情報検出センサ等を利用すればよい。その検出信号は、ハイブリッドECU100に送られる。このハイブリッドECU100は、その検出信号に基づいて、運転者の選択した変速段、現状の変速段を判断する。尚、ここでは、便宜上、その変速位置検出部83をEV走行モード選択位置検出部82とは別のものとして例示したが、これらを1つに統合したシフトレバー位置検出部(図示略)に置き換えてもよい。ここで、そのハイブリッドECU100には、この技術分野にて知られている周知の技術を利用して、エンジントルクや車輪速度等から現在の変速段を推定させてもよい。
【0035】
シフトレバー81aが変速位置1〜4,Rに操作されている場合、ハイブリッドECU100は、エンジン走行モード又はハイブリッド走行モードの内の何れか一方を選択する。例えば、このハイブリッドECU100は、設定した運転者の駆動要求(要求駆動力)、モータ/ジェネレータECU102から送られてきた二次電池25の充電状態の情報(SOC量)、車両走行状態の情報(図示しない車両横加速度検出装置により検出された車両横加速度、車輪スリップ検出装置により検出された駆動輪WL,WRのスリップ状態等の情報)に基づいて、エンジン走行モードとハイブリッド走行モードの切り替えを行う。
【0036】
ハイブリッドECU100は、エンジン走行モードを選択した場合、エンジントルクのみで要求駆動力を発生させるように、エンジンECU101及びモータ/ジェネレータECU102に制御指令を送る。この場合には、エンジンECU101への制御指令として、例えば現状の変速段又は変速操作後の変速段でその要求駆動力を満足させるエンジントルクの情報が送信される。これにより、そのエンジンECU101は、そのエンジントルクを発生させるようにエンジン10の燃料噴射量等の制御を行う。一方、モータ/ジェネレータECU102には、モータ/ジェネレータ20をモータとしてもジェネレータとしても動作させないよう制御指令を送る。
【0037】
これに対して、このハイブリッドECU100は、ハイブリッド走行モードを選択した場合、エンジントルクとモータ/ジェネレータ20のモータ又はジェネレータとしての出力で要求駆動力を発生させるように、エンジンECU101及びモータ/ジェネレータECU102に制御指令を送る。この場合、エンジントルクとモータ力行トルクの双方を用いるときには、エンジンECU101とモータ/ジェネレータECU102への制御指令として、例えば現状の変速段又は変速操作後の変速段でその要求駆動力を満足させるエンジントルクとモータ力行トルクの情報が夫々に送信される。これにより、そのエンジンECU101は、そのエンジントルクを発生させるようにエンジン10の制御を行い、モータ/ジェネレータECU102は、そのモータ力行トルクを発生させるようにモータ/ジェネレータ20への給電量を制御する。また、モータ/ジェネレータ20で電力の回生を行わせるときには、モータ/ジェネレータECU102に対してモータ/ジェネレータ20をジェネレータとして動作させるよう制御指令を送る。その際、例えば、エンジンECU101には、モータ回生トルクの分だけ増加させたエンジントルクの情報が送られる。
【0038】
また、シフトレバー81aがEV走行モード選択位置EVに操作されている場合、ハイブリッドECU100は、モータ力行トルクのみで要求駆動力を発生させるように、エンジンECU101及びモータ/ジェネレータECU102に制御指令を送る。この場合には、モータ/ジェネレータECU102への制御指令として、その要求駆動力を満足させるモータ力行トルクの情報が送信される。手動変速機30がニュートラル状態のときにエンジン10が動いていると、燃費を悪化させてしまうので、エンジンECU101には、燃費を向上させるべく、エンジン10の動作を停止させる制御指令を送る。更に、このEV走行モードにおいては、運転者がアクセルペダル91から足を離したとき又はブレーキ操作等でハイブリッド車両1の減速要求を行ったときに、モータ/ジェネレータECU102に対して回生制動できるよう制御指令を送らせてもよい。
【0039】
本実施例のハイブリッド車両1においては、運転者によるクラッチ50の操作と変速操作装置81の操作を契機にして、エンジン走行モード又はハイブリッド走行モードとEV走行モードとの間の切り替えが実行される。つまり、本実施例のクラッチ50、クラッチペダル51及び変速操作装置81は、運転者に走行モードを手動で選択させる為の走行モード選択装置であるとも云える。運転者は、エンジン走行モード又はハイブリッド走行モードからEV走行モードへと切り替える際、クラッチ50の解放操作、シフトレバー81aの変速位置1〜4からEV走行モード選択位置EVへの操作、クラッチ50の係合操作を順に行う。その際、ハイブリッドECU100の受信する検出信号は、変速位置検出部83の検出信号からEV走行モード選択位置検出部82の検出信号に変わる。一方、EV走行モードからエンジン走行モード又はハイブリッド走行モードへと切り替える際には、クラッチ50の解放操作、EV走行モード選択位置EVからシフトレバー81aの変速位置1〜4への操作、クラッチ50の係合操作が順に行われる。その際にハイブリッドECU100の受信する検出信号は、EV走行モード選択位置検出部82の検出信号から変速位置検出部83の検出信号に変わる。
【0040】
ところで、エンジン10やモータ/ジェネレータ20は、その仕様にも依るが、夫々に燃費性能の向上に適した運転効率の良い車速域を持っている。これが為、燃費性能を高める為には、運転効率の良い動力源を用いて走行させることが好ましい。このハイブリッド車両1では、エンジン10の運転効率とモータ/ジェネレータ20の運転効率とを車速毎に比べてみると、発進時、つまり低車速時において、エンジン10よりもモータ/ジェネレータ20の運転効率の方が優れている。また、低い車速域(例えば一般道を法定速度の範囲内で走行しているときの車速域)の定常走行時、つまり中車速時においても、モータ/ジェネレータ20の運転効率は、エンジン10よりも優れている。故に、低車速時や中車速時には、モータ/ジェネレータ20の出力を利用して走行させることで、エンジン10を回して走行させるよりも燃費性能が高くなる。一方、これ以外の車速域、つまり高車速時(高速走行時)には、モータ/ジェネレータ20よりもエンジン10の運転効率の方が優れており、エンジン10の出力を利用して走行させることで燃費性能が高くなる。
【0041】
そこで、この制御システムにおいては、EV走行モードが選択されたときに、その選択の際の車速がエンジン10よりもモータ/ジェネレータ20の方が運転効率に優れる車速域であれば、その運転者による選択の意思の通りにモータ/ジェネレータ20の動力を使って走行させる。一方、この制御システムにおいては、その選択の際の車速がモータ/ジェネレータ20よりもエンジン10の運転効率の方が優れている車速域であれば、燃費性能を向上させるべく、運転者に対してEV走行モードからエンジン10の動力を利用したエンジン走行モードやハイブリッド走行モードへの切り替えを促す。
【0042】
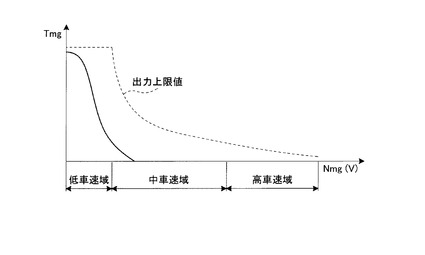
例えば、このハイブリッド車両1は、エンジン10の燃料消費量が多くなりがちな発進時のEV走行モードの使用が推奨されている。これが為、この制御システムには、発進時(低車速時)におけるEV走行モードのモータ/ジェネレータ20の出力特性マップ(図4)が用意されている。その発進時(低車速時)の出力特性マップは、回転数Nmg(車速V)が最も低いときにモータ力行トルクTmgの出力上限値を超えない範囲内で最大のモータ力行トルクTmgを発生させ、その回転数Nmg(車速V)が高くなるにつれて徐々にモータ力行トルクTmgを低下させていくという出力特性のものである。
【0043】
ここで、モータ/ジェネレータ20は、その回転数Nmg(車速V)が或る回転数Nmg1(車速V1)を超えるまでモータ力行トルクTmgを最大の出力上限値まで出力させることができ、その回転数Nmg1(車速V1)を超えるとモータ力行トルクTmgの出力上限値が徐々に低下していくものである。その出力上限値は、モータ/ジェネレータ20の仕様で異なる。このモータ/ジェネレータ20においては、その回転数Nmg1(車速V1)よりも低いときが発進時に相当する低車速時となる。
【0044】
この出力特性マップにおいては、発進動作(低車速)の終わる頃に、具体的には回転数Nmg(車速V)が所定回転数Nmg1(所定車速V1)を超えた辺りで0になるようモータ力行トルクTmgを低下させている。つまり、この出力特性マップでは、発進動作を終えるとモータ/ジェネレータ20からの出力が禁止される。この出力特性マップには、燃費性能を高めることのできる最大のモータ力行トルクTmgが設定されている。
【0045】
この場合の制御システムにおいては、EV走行モードが選択された際の車速V(車速センサ等の車速検出装置95で検出)が低車速域のときに(Nmg<Nmg1、V<V1)、発進時(低車速時)の出力特性マップを読み込み、その出力特性マップに応じたモータ力行トルクTmgをモータ/ジェネレータ20に出力させる。例えば、ハイブリッドECU100は、その出力特性マップでモータ/ジェネレータ20を制御させるようモータ/ジェネレータECU102に指令を送る。
【0046】
発進させる為にEV走行モードが選択されたときには、運転者のアクセル操作に伴い発進時(低車速時)の出力特性マップに応じたモータ力行トルクTmgが出力されて、ハイブリッド車両1が発進し始める。このときのハイブリッド車両1は、低車速域において、その出力特性マップに応じたモータ力行トルクTmgだけが出力されるので、燃費性能に優れたEV走行を行うことができる。
【0047】
ここで、その出力特性マップでは、低車速域が終わる頃(つまり発進の終わる頃)にモータ力行トルクTmgの出力が禁止される。これが為、その際には、運転者の加速要求に拘わらずハイブリッド車両1が減速し始めるので、運転者が違和感を覚える。一般に、手動変速機30の搭載された車両の運転者は、自らの加速要求に対して所望の加速度が得られない場合に、シフトレバー81aに手を掛けてダウンシフト操作を行うものである。つまり、この制御システムにおいては、そのモータ力行トルクTmgの出力を禁止させることによって、運転者にシフトレバー81aへ手を掛けさせる可能性を高めている。従って、この制御システムは、モータ/ジェネレータ20からの出力を禁止させることによって、運転者に対してEV走行モードからエンジン走行モード又はハイブリッド走行モードへの切り替えを促すことになる。その際には、モータ/ジェネレータ20からの出力の禁止と共に、下記の警報等を出力してもよい。
【0048】
ハイブリッドECU100には、モータ/ジェネレータ20からの出力を禁止させる前に、モータ力行トルクTmgが未だ出力されている車速Vの時点で、運転者に対してEV走行モードからエンジン走行モード又はハイブリッド走行モードへの切り替えを促させてもよい。例えば、その際には、車室内の音響装置96から警報を出力させたり、車室内の表示装置97にメッセージ等を表示させたりして、走行モードの切り替えを運転者に伝える。
【0049】
その違和感や警報等によって運転者が走行モードの切り替え操作を行ったならば、ハイブリッドECU100は、エンジン走行モード又はハイブリッド走行モードでの走行に切り替える。
【0050】
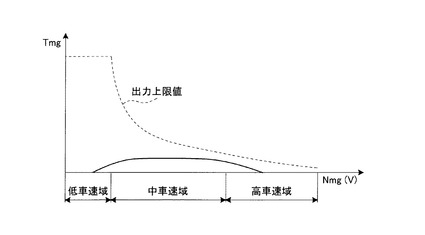
このハイブリッド車両1においては、中車速域においてもモータ/ジェネレータ20の方がエンジン10よりも運転効率に優れている。これが為、この制御システムには、中車速時におけるEV走行モードのモータ/ジェネレータ20の出力特性マップ(図5)も用意されている。中車速時には、発進時よりもモータ力行トルクTmgの出力上限値が低く、また、発進時ほどの大きい駆動力を必要としない。その中車速時の出力特性マップは、エンジン10よりもモータ/ジェネレータ20の運転効率の方が優れている車速域に加えて、EV走行モードにおける中車速時の運転者の操作性(例えばアクセルペダル91の踏み込みに対する応答性等)を考慮した余裕代分の車速域を含めている。ここでは、回転数Nmg(車速V)が所定回転数Nmg1(所定車速V1)よりも低い領域からモータ力行トルクTmgが徐々に立ち上がり、その所定回転数Nmg1(所定車速V1)を超えた辺りから出力上限値を超えない範囲内でモータ力行トルクTmgを略一定にし、中車速が終わりを迎えるにつれて徐々に0へとモータ力行トルクTmgを低下させていくという出力特性の出力特性マップにしている。つまり、この出力特性マップは、中車速域のみならず、低車速域や高車速域の一部でもモータ力行トルクTmgの出力ができるようになっている。この出力特性マップにおいても、燃費性能を高めることのできる最大のモータ力行トルクTmgが設定されている。この出力特性マップは、EV走行モードが選択された際の車速Vが中車速域以上(Nmg≧Nmg1、V≧V1)のときに用いる。
【0051】
この場合の制御システムにおいては、EV走行モードが選択された際の車速Vが中車速域のときに、中車速時の出力特性マップを読み込み、その出力特性マップに応じたモータ力行トルクTmgをモータ/ジェネレータ20に出力させる。従って、このハイブリッド車両1は、中車速域において、その出力特性マップに応じたモータ力行トルクTmgだけが出力されるので、燃費性能に優れたEV走行を行うことができる。
【0052】
このように、この制御システムは、EV走行モードが選択されたときのモータ/ジェネレータ20の出力可能領域を運転効率の良い車速域に制限し、車速Vがその車速域から外れたとき又は外れるときにエンジン走行モード又はハイブリッド走行モードへの切り替え操作を運転者に対して促す。これが為、ハイブリッド車両1は、エンジン10よりもモータ/ジェネレータ20の運転効率が良い車速域であれば、エンジン10よりも燃費性能に優れるモータ/ジェネレータ20の動力でEV走行でき、モータ/ジェネレータ20よりもエンジン10の運転効率が良い車速域であれば、モータ/ジェネレータ20よりも燃費性能に優れるエンジン10の動力を利用して走行できる。従って、このハイブリッド車両1は、様々な車速域で燃費走行を行うことができる。また、この制御システムは、EV走行モードが選択されたときのモータ/ジェネレータ20の出力可能領域にそのような制限を掛けているので、つまり車速Vが運転効率の良い車速域から外れたときにモータ/ジェネレータ20からの出力が禁止されるので、そのモータ/ジェネレータ20の使用頻度を抑えることができ、二次電池25の残存容量(SOC量)の低下を抑制することができる。
【0053】
この例示では、発進時(低車速時)の出力特性マップや中車速時の出力特性マップの高車速域側において、EV走行モードからの切り替え操作が行われないときに、モータ/ジェネレータ20からの出力を禁止させずに、運転者のアクセル操作量(アクセル開度センサ等のアクセル操作量検出装置92で検出)に応じたモータ力行トルクTmg等を出力させることも考えられる。しかしながら、そのようなモータ/ジェネレータ20の使用は、二次電池25の残存容量(SOC量)を減少させるので好ましくない。また、高車速域におけるモータ/ジェネレータ20の使用は、燃費性能の悪化をも招くことから好ましくない。従って、その際のモータ/ジェネレータ20の使用はできる限り避ける方が良いのだが、如何様に走行モードの切り替え操作を促しても操作が行われない可能性も考えられ、そのときには、ハイブリッド車両1が減速し、運転者が減速を望んでいなければ、運転者に違和感を与えるのみならず、ドライバビリティの悪化を招く。故に、運転者の違和感やドライバビリティの悪化を抑えつつSOC量の減少も抑えるべく、運転者のアクセル操作に応じたものよりも抑えた大きさのモータ力行トルクTmgを出力させることが好ましい。この抑制したモータ/ジェネレータ20からの出力により、運転者の違和感やドライバビリティの悪化、SOC量の減少を多少なりとも抑えつつ、アクセル操作に応じた要求に対する実際のハイブリッド車両1の動きの違いを運転者に感知させることができるので、この制御システムは、走行を継続させたままEV走行モードからの切り替え操作を更に促すことができる。
【0054】
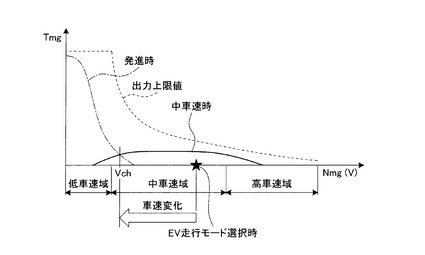
ここで、中車速時の出力特性マップの低車速域側においては、EV走行モードからの切り替え操作を促しているにも拘わらず操作されないと、車速Vがモータ/ジェネレータ20の出力禁止領域(Tmg=0)まで低下する。ハイブリッド車両1は、かかる状況下で運転者が加速を試みても駆動力を発生させることができないので、加速できないままハイブリッド車両1が減速し続ける。これは、EV走行モードで使用する出力特性マップをEV走行モードが選択されたときの車速Vで選んでいるからであり、車速Vがモータ/ジェネレータ20の出力禁止領域まで落ちたときに対応できないからである。この制御システムにおいては、そのような事態を回避すべく、中車速時の出力特性マップから発進時(低車速時)の出力特性マップに切り替えさせる。
【0055】
例えば、この制御システムには、発進時(低車速時)と中車速時の夫々の出力特性マップにおけるモータ力行トルクTmgの交点において、中車速時の出力特性マップから発進時(低車速時)の出力特性マップへと切り替えさせる。その交点におけるモータ力行トルクTmgと車速Vは、予め求めておく。以下、その交点の車速Vを「特性変更車速Vch」という。
【0056】
中車速域での走行中にEV走行モードが選択された場合には、図6に示すように、中車速時の出力特性マップが選ばれる。このEV走行の最中に運転者がアクセルペダル91から足を離すと、ハイブリッド車両1は、減速し始めて、そのままの状態が続くことによりマップ上におけるモータ/ジェネレータ20の低車速域側の出力禁止領域が近づく。ハイブリッドECU100は、車速Vの下降中に、その車速Vが特性変更車速Vchまで下がったのか否か判定し、特性変更車速Vchまで到達していなければ、現状の中車速時の出力特性マップのままEV走行を継続させる。そして、このハイブリッドECU100は、車速Vが特性変更車速Vchまで下がったときに、中車速時の出力特性マップから発進時(低車速時)の出力特性マップに切り替える。これが為、その後でアクセルペダル91が踏まれたときには、その発進時(低車速時)の出力特性マップによるモータ力行トルクTmgでハイブリッド車両1を加速させることができる。
【0057】
このように、各出力特性マップにおける交点の特性変更車速Vchを境にして出力特性マップを切り替えさせることで、その切り替えに伴うモータ力行トルクTmgの変動を無くすことができる。従って、この制御システムは、出力特性マップの切り替えによる駆動力の変動を起こさないので、ピッチング変化等の違和感を運転者に与えない。更に、この制御システムは、燃費性能を高めることのできる範囲内で最大のモータ力行トルクTmgを出力特性マップの切り替え前後でも発生させることができ、切り替え後も燃費走行が可能になる。
【0058】
この場合、発進時(低車速時)の出力特性マップを用いて加速し続けると、この出力特性マップのモータ/ジェネレータ20の出力禁止領域まで車速Vが上昇する。これが為、この制御システムには、前述したように、EV走行モードからの切り替え操作を促させる。
【0059】
また、出力特性マップの切り替えは、次の様に行ってもよい。
【0060】
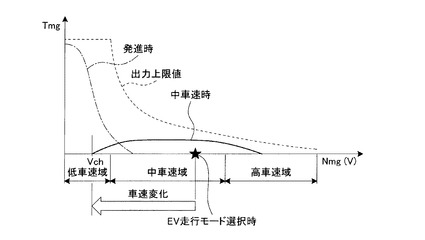
この場合の制御システムにおいては、図7に示すように、現状で選択されている中車速時の出力特性マップを最後まで(つまりモータ力行トルクTmgの出力が禁止になるまで)使ったEV走行を実行し、その出力特性マップでモータ力行トルクTmgを出力できなくなる車速(特性変更車速Vch)となったときに発進時(低車速時)の出力特性マップへと切り替える。これが為、この場合にも、その後でアクセルペダル91が踏まれたときには、その発進時(低車速時)の出力特性マップによるモータ力行トルクTmgでハイブリッド車両1を加速させることができる。
【0061】
このように、この場合には、先の例示よりも出力特性マップが切り替わるまでのヒステリシスが大きくなり、発進時と判断できる程度にまで車速Vが低下しないと出力特性マップの切り替えが行われないので、出力特性マップが切り替わったことを運転者が認識し易い。
【0062】
ここで、先の出力特性マップの切り替えの例示では、夫々の出力特性マップにおけるモータ力行トルクTmgの交点で切り替えを行うので、運転者によるアクセルペダル91の加速操作がその切り替えからの早い段階で行われるほど、その加速操作時から発進時(低車速時)の出力特性マップ上におけるモータ/ジェネレータ20の出力禁止領域に至るまでの車速差が小さくなる。これが為、このときには、発進時(低車速時)の出力特性マップによる加速時間が短くなる。これに対して、中車速時の出力特性マップを最後まで使ってから発進時(低車速時)の出力特性マップに切り替えることにより、その車速差を拡げることができるので、発進時(低車速時)の出力特性マップによる加速時間が長くなり、加速性を高めることができる。
【0063】
ここで例として挙げた出力特性マップ切り替えの2種類の形態は、中車速時の出力特性マップから発進時(低車速時)の出力特性マップへの切り替えのみを示した。これは、逆の切り替えを行うと、EV走行モードの使用時間を長引かせ、二次電池25の残存容量(SOC量)を大幅に低下させてしまう虞があるからである。しかしながら、前述した、SOC量の低下に目を瞑ってでも運転者の違和感やドライバビリティの悪化の抑制が求められるときには、モータ/ジェネレータ20からの出力の抑制に替えて、発進時(低車速時)の出力特性マップから中車速時の出力特性マップへの逆の切り替えを実行してもよい。
【産業上の利用可能性】
【0064】
以上のように、本発明に係る車両の制御システムは、運転効率の良い動力源による走行モードで走行させることのできる技術に有用である。
【符号の説明】
【0065】
1 ハイブリッド車両
10 エンジン
12 スタータモータ
20 モータ/ジェネレータ
25 二次電池
27 電池監視ユニット
30 手動変速機
50 クラッチ
51 クラッチペダル
60 歯車対(EVギア)
81 変速操作装置
81a シフトレバー
81b シフトゲージ
82 EV走行モード選択位置検出部
83 変速位置検出部
100 ハイブリッドECU
101 エンジンECU
102 モータ/ジェネレータECU
EV EV走行モード選択位置
【技術分野】
【0001】
本発明は、機械エネルギを動力とする機械動力源と電気エネルギを変換した機械エネルギを動力とする電気動力源とを備え、機械動力源を用いたエンジン走行モードと、電気動力源を用いたEV走行モードと、機械動力源及び電気動力源を用いたハイブリッド走行モードと、を手動で切り替えさせる車両の制御システムに関する。
【背景技術】
【0002】
従来、動力源として機械動力源と電気動力源とを備えた車両が知られている。例えば、下記の特許文献1には、運転者の運転意図(要求トルクの変化率)に対するエンジン(機械動力源)とモータ(電気動力源)の夫々の特性を生かした最適なトルク分配率を設定し、そのトルク分配率でエンジンとモータを最適に制御する技術が開示されている。尚、下記の特許文献2には、自動マニュアル変速機が搭載されたハイブリッド車両において、モータで発進させ、所定車速以上でエンジンにより走行させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−050877号公報
【特許文献2】特開2000−272360号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、エンジン走行モード等の走行モード(換言するならば動力源)を車両側が自動的に選択するハイブリッド車両については広く知られている。一方、ハイブリッド車両においては、その走行モードの選択を運転者に任せるものも考えられる。しかしながら、この種のハイブリッド車両においては、運転者が今現在又はこれからの車速等の走行条件に基づいて運転効率の良い動力源による走行モードを選択する必要があるのだが、そのような選択を運転者に委ねることは現実問題として困難である。
【0005】
そこで、本発明は、かかる従来例の有する不都合を改善し、運転効率の良い動力源による走行モードで走行させることが可能な車両の制御システムを提供することを、その目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成する為、本発明は、機械エネルギを動力にして駆動力を発生させる機械動力源の動力を用いたエンジン走行モード、電気エネルギを変換した機械エネルギを動力にして駆動力を発生させる電気動力源の動力を用いたEV走行モード、又は前記機械動力源及び前記電気動力源の双方の動力を用いたハイブリッド走行モード、を運転者に手動で選択させる走行モード選択装置と、運転者が前記走行モード選択装置により前記EV走行モードを選択した際の車速に応じて前記電気動力源の出力特性を設定し、該電気動力源よりも前記機械動力源の運転効率の方が優れているときに当該電気動力源からの出力を抑制又は禁止する電気動力源制御装置と、を備えることを特徴としている。
【0007】
ここで、前記電気動力源制御装置は、前記EV走行モードでの走行中に変化した車速に応じて、前記電気動力源の出力特性を前記EV走行モードの選択時の出力特性から変更することが望ましい。
【0008】
また、前記電気動力源制御装置は、夫々の前記出力特性における前記電気動力源の出力の交点で出力特性の変更を行うことが望ましい。
【発明の効果】
【0009】
本発明に係る車両の制御システムは、運転者に選択されてEV走行を行う場合、電気動力源よりも機械動力源の方が運転効率に優れ、燃費性能が良いと判ったならば、電気動力源からの出力を抑制又は禁止することで、運転者のアクセル操作と車両の動きとを一致させ難くする。この制御システムにおいては、これにより運転者に違和感を与え、EV走行モードからエンジン走行モードやハイブリッド走行モードへの切り替え操作を促す。従って、運転者がEV走行モードからエンジン走行モードやハイブリッド走行モードに切り替える可能性が高くなるので、この制御システムは、運転効率の良い機械動力源を使った走行モードで車両を走行させることができる。
【図面の簡単な説明】
【0010】
【図1】図1は、本発明に係る車両の制御システムが適用されるハイブリッド車両の一例を示す図である。
【図2】図2は、走行モード選択装置の一例を示すニュートラル状態選択時の図である。
【図3】図3は、走行モード選択装置の一例を示すEV走行モード選択時の図である。
【図4】図4は、発進時(低車速時)におけるEV走行モードのモータ/ジェネレータの出力特性マップの一例を示す図である。
【図5】図5は、中車速時におけるEV走行モードのモータ/ジェネレータの出力特性マップの一例を示す図である。
【図6】図6は、中車速時の出力特性マップから発進時(低車速時)の出力特性マップへの切り替えの一例について説明する図である。
【図7】図7は、中車速時の出力特性マップから発進時(低車速時)の出力特性マップへの切り替えの他の例について説明する図である。
【発明を実施するための形態】
【0011】
以下に、本発明に係る車両の制御システムの実施例を図面に基づいて詳細に説明する。尚、この実施例によりこの発明が限定されるものではない。
【0012】
[実施例]
本発明に係る車両の制御システムの実施例を図1から図7に基づいて説明する。
【0013】
本発明に係る制御システムの適用対象たる車両とは、機械エネルギを動力とする機械動力源と電気エネルギを変換した機械エネルギを動力とする電気動力源とを備え、機械動力源の動力のみを用いたエンジン走行モードと、電気動力源の動力のみを用いたEV走行モードと、機械動力源及び電気動力源の双方の動力を用いたハイブリッド走行モードと、を運転者が手動で切り替えることの可能なハイブリッド車両である。
【0014】
最初に、このハイブリッド車両の一例について図1を用いて説明する。この図1の符号1は、本実施例のハイブリッド車両を示す。
【0015】
このハイブリッド車両1は、機械動力源として、出力軸(クランクシャフト)11から機械的な動力(エンジントルク)を出力するエンジン10を備える。そのエンジン10としては、内燃機関や外燃機関等が考えられる。このエンジン10は、その動作がエンジン用の電子制御装置(以下、「エンジンECU」という。)101によって制御される。このエンジン10には、エンジンECU101によって始動時に駆動制御されるスタータモータ12が設けられている。ここでは、そのエンジンECU101と後述するハイブリッドECU100のエンジン制御に係る機能とによってエンジン制御装置(機械動力源制御装置)が構成される。
【0016】
また、このハイブリッド車両1は、電気動力源として、モータ、力行駆動可能なジェネレータ又は力行及び回生の双方の駆動が可能なモータ/ジェネレータを備える。ここでは、モータ/ジェネレータ20を例に挙げて説明する。このモータ/ジェネレータ20は、例えば永久磁石型交流同期電動機として構成されたものであり、その動作がモータ/ジェネレータ用の電子制御装置(以下、「モータ/ジェネレータECU」という。)102によって制御される。ここでは、そのモータ/ジェネレータECU102と後述するハイブリッドECU100のモータ/ジェネレータ制御に係る機能とによってモータ/ジェネレータ制御装置(電気動力源制御装置)が構成される。力行駆動時には、モータ(電動機)として機能して、二次電池25とインバータ26を介して供給された電気エネルギを機械エネルギに変換し、回転軸21から機械的な動力(モータ力行トルク)を出力する。一方、回生駆動時には、ジェネレータ(発電機)として機能して、回転軸21から機械的な動力(モータ回生トルク)が入力された際に機械エネルギを電気エネルギに変換し、インバータ26を介して電力として二次電池25に蓄える。
【0017】
このハイブリッド車両1には、その二次電池25の充電状態(SOC:state of charge)を検出する電池監視ユニット27が設けられている。その電池監視ユニット27は、検出した二次電池25の充電状態に係る信号(換言するならば、充電状態量(SOC量)に関する信号)をモータ/ジェネレータECU102に送信する。そのモータ/ジェネレータECU102は、その信号に基づいて二次電池25の充電状態の判定を行い、その二次電池25の充電の要否を判定する。
【0018】
また、このハイブリッド車両1は、有段の手動変速機30等からなる動力伝達装置を備えている。その動力伝達装置は、エンジン10やモータ/ジェネレータ20の動力(エンジントルクやモータ力行トルク)を駆動力として駆動輪WL,WRに伝えるものである。
【0019】
手動変速機30には、エンジントルクが入力される入力軸41と、この入力軸41に対して間隔を空けて平行に配置され、駆動輪WL,WR側にトルクを出力する出力軸42と、が設けられている。
【0020】
その入力軸41には、クラッチ50を介してエンジントルクが入力される。そのクラッチ50は、エンジン10の出力軸11と入力軸41とを係合させる係合状態と、その出力軸11と入力軸41とを係合状態から解放(非係合)させる解放状態(非係合状態)と、の切り替えができるように構成された例えば摩擦クラッチ装置である。ここで言う係合状態とは、その出力軸11と入力軸41との間でのトルクの伝達が可能な状態のことであり、解放状態(非係合状態)とは、その出力軸11と入力軸41との間でのトルクの伝達が行えない状態のことである。このクラッチ50は、その係合状態と解放状態の切り替え動作が運転者のクラッチペダル51の操作に従いリンク機構やワイヤー等を介して機械的に行われるものである。
【0021】
本実施例においては、その出力軸42にEVギアとしての歯車対60を介してモータ/ジェネレータ20を連結する。その歯車対60は、互いに噛み合い状態にある第1ギア61と第2ギア62とで構成する。その第1ギア61は、モータ/ジェネレータ20の回転軸21に一体となって回転するよう取り付ける。一方、第2ギア62は、その第1ギア61よりも大径に成形し、手動変速機30の出力軸42に一体となって回転するよう取り付ける。これにより、この歯車対60は、モータ/ジェネレータ20の回転軸21側からトルクが入力されることによって減速装置として動作する一方、手動変速機30の出力軸42側から回転トルクが入力されることによって増速装置として動作する。従って、そのモータ/ジェネレータ20を力行駆動させたときには、モータ力行トルクが減速装置として機能する歯車対60を介して手動変速機30に伝わる。これに対して、このモータ/ジェネレータ20を回生駆動させたときには、増速装置として機能する歯車対60を介して手動変速機30の出力軸42からの出力トルクがモータ/ジェネレータ20のロータに伝達される。ここで、その歯車対60は、後述するシフトレバー81aがシフトゲージ81b上のどの位置にあっても、つまり変速位置1〜4,R、EV走行モード選択位置EV又はニュートラル位置にあっても、噛み合い状態になっているものとする。尚、モータ/ジェネレータ20は、この歯車対60を介さずに、回転軸21を手動変速機30の出力軸42に直接連結してもよい。
【0022】
更に、ここで例示する手動変速機30は、前進4段、後退1段の変速段を有するものであって、前進用の変速段として第1速ギア段31,第2速ギア段32,第3速ギア段33及び第4速ギア段34を備え、且つ、後退用の変速段として後退ギア段39を備えている。前進用の変速段は、変速比が第1速ギア段31,第2速ギア段32,第3速ギア段33,第4速ギア段34の順に小さくなるよう構成している。尚、図1の手動変速機30はその構成を簡易的に説明したものであり、各変速段の配置については、必ずしも図1の態様になるとは限らない。
【0023】
本実施例の動力伝達装置においては、クラッチ50を係合状態にすることで、入力軸41に入力されたエンジントルクが各変速段(ギア段31〜34,39)の内の何れか1つで変速されて出力軸42に伝わる。また、この動力伝達装置においては、モータ力行トルクが歯車対60を介して出力軸42に伝わる。この動力伝達装置においては、その出力軸42から出力されたトルクが最終減速機構71で減速され、差動機構72を介して駆動力として駆動輪WL,WRに伝達される。
【0024】
ここで、第1速ギア段31は、互いに噛み合い状態にある第1速ドライブギア31aと第1速ドリブンギア31bの歯車対で構成する。その第1速ドライブギア31aは、入力軸41上に配置される一方、第1速ドリブンギア31bは、出力軸42上に配置される。第2速ギア段32から第4速ギア段34についても、第1速ギア段31と同様の第2速ドライブギア32a〜第4速ドライブギア34aと第2速ドリブンギア32b〜第4速ドリブンギア34bを有する。
【0025】
一方、後退ギア段39については、後退ドライブギア39aと後退ドリブンギア39bと後退中間ギア39cとで構成する。その後退ドライブギア39aは、入力軸41上に配置され、後退ドリブンギア39bは、出力軸42上に配置される。また、後退中間ギア39cは、後退ドライブギア39a及び後退ドリブンギア39bと噛み合い状態にあり、回転軸43上に配置される。
【0026】
この手動変速機30の構成においては、各変速段のドライブギアの内の何れかが入力軸41と一体になって回転するように配設される一方、残りのドライブギアが入力軸41に対して相対回転するように配設される。また、各変速段のドリブンギアは、その内の何れかが出力軸42と一体になって回転するように配設される一方、残りが出力軸42に対して相対回転するように配設される。
【0027】
また、入力軸41や出力軸42には、運転者の変速操作に従って軸線方向に移動するスリーブ(図示略)が配設されている。入力軸41上のスリーブは、その入力軸41と相対回転可能な2つの変速段の各ドライブギアの間に配置される。一方、出力軸42上のスリーブは、その出力軸42と相対回転可能な2つの変速段の各ドリブンギアの間に配置される。このスリーブは、変速操作装置81を運転者が操作した際に、その変速操作装置81に連結されている図示しないリンク機構やフォークを介して軸線方向への移動を行う。そして、移動後のスリーブは、移動された方向に位置する相対回転可能なドライブギアやドリブンギアを入力軸41や出力軸42と一体回転させる。この手動変速機30においては、そのスリーブが運転者の変速操作装置81の変速操作に対応した方向に移動し、これによりその変速操作に応じた変速段への切り替え又はニュートラル状態(つまり入力軸41と出力軸42との間でトルクの伝達が行えない状態)への切り替えが実行される。
【0028】
その変速操作装置81は、図2に示す如く、運転者が変速操作する際に使用するシフトレバー81a、このシフトレバー81aを夫々の変速段毎にガイドする所謂シフトゲージ81b、上記のリンク機構やフォーク等を備えている。図2は、手動変速機30をニュートラル状態に操作するときのシフトレバー81aの位置を示している。尚、この図2のシフトゲージ81b上の「1〜4」と「R」は、夫々に第1速ギア段31〜第4速ギア段34と後退ギア段39の変速位置(セレクト位置)を示している。
【0029】
このハイブリッド車両1においては、その走行モードとして、エンジン走行モードとEV走行モードとハイブリッド走行モードとが少なくとも用意されている。
【0030】
このハイブリッド車両1では、シフトレバー81aがシフトゲージ81b上の変速位置1〜4,Rの内の何れかに位置しているときに、エンジン走行モード又はハイブリッド走行モードが選択される。
【0031】
一方、このハイブリッド車両1においては、EV走行モードが選択されるときに運転者によって操作されるEV走行モード切替装置を利用する。ここでは、そのEV走行モード切替装置としての機能を変速操作装置81にもたせることにする。つまり、本実施例の変速操作装置81は、運転者に手動変速機30の変速段を切り替えさせるだけでなく、運転者がEV走行モードに切り替える際のEV走行モード切替装置としての機能も兼ね備えている。例えば、この変速操作装置81は、変速位置1〜4,Rと同様のシフトレバー81aのセレクト位置であって、EV走行モードに切り替える為のEV走行モード選択位置EVをシフトゲージ81b上に備えている。本実施例のハイブリッド車両1においては、シフトレバー81aが図3に示す如くEV走行モード選択位置EVへと操作された際に、手動変速機30がスリーブ等によってニュートラル状態となり、且つ、走行モードがEV走行モードとなる。
【0032】
その変速操作装置81には、シフトレバー81aがEV走行モード選択位置EVに位置しているのか否かを検出するEV走行モード選択位置検出部82が設けられている。このEV走行モード選択位置検出部82とは、例えば、シフトレバー81aが図3に示す如くEV走行モード選択位置EVにあることを検出可能な位置情報検出センサ等である。このEV走行モード選択位置検出部82の検出信号は、車両全体の動作を統括的に制御する電子制御装置(以下、「ハイブリッドECU」という。)100に送信される。
【0033】
そのハイブリッドECU100は、エンジンECU101及びモータ/ジェネレータECU102との間で夫々に各種センサの検出信号や制御指令等の情報の授受ができる。本実施例においては、少なくともそのハイブリッドECU100、エンジンECU101及びモータ/ジェネレータECU102が車両の制御システムの構成要件となっている。
【0034】
また、この変速操作装置81は、シフトレバー81aがシフトゲージ81b上のどの変速位置1〜4,Rにあるのかについて、つまり運転者がどの変速段を選択したのか否かを検出する変速位置検出部83を備えている。その変速位置検出部83は、例えば、シフトレバー81aがどの変速位置1〜4,Rにあるのかを検出可能な位置情報検出センサ等を利用すればよい。その検出信号は、ハイブリッドECU100に送られる。このハイブリッドECU100は、その検出信号に基づいて、運転者の選択した変速段、現状の変速段を判断する。尚、ここでは、便宜上、その変速位置検出部83をEV走行モード選択位置検出部82とは別のものとして例示したが、これらを1つに統合したシフトレバー位置検出部(図示略)に置き換えてもよい。ここで、そのハイブリッドECU100には、この技術分野にて知られている周知の技術を利用して、エンジントルクや車輪速度等から現在の変速段を推定させてもよい。
【0035】
シフトレバー81aが変速位置1〜4,Rに操作されている場合、ハイブリッドECU100は、エンジン走行モード又はハイブリッド走行モードの内の何れか一方を選択する。例えば、このハイブリッドECU100は、設定した運転者の駆動要求(要求駆動力)、モータ/ジェネレータECU102から送られてきた二次電池25の充電状態の情報(SOC量)、車両走行状態の情報(図示しない車両横加速度検出装置により検出された車両横加速度、車輪スリップ検出装置により検出された駆動輪WL,WRのスリップ状態等の情報)に基づいて、エンジン走行モードとハイブリッド走行モードの切り替えを行う。
【0036】
ハイブリッドECU100は、エンジン走行モードを選択した場合、エンジントルクのみで要求駆動力を発生させるように、エンジンECU101及びモータ/ジェネレータECU102に制御指令を送る。この場合には、エンジンECU101への制御指令として、例えば現状の変速段又は変速操作後の変速段でその要求駆動力を満足させるエンジントルクの情報が送信される。これにより、そのエンジンECU101は、そのエンジントルクを発生させるようにエンジン10の燃料噴射量等の制御を行う。一方、モータ/ジェネレータECU102には、モータ/ジェネレータ20をモータとしてもジェネレータとしても動作させないよう制御指令を送る。
【0037】
これに対して、このハイブリッドECU100は、ハイブリッド走行モードを選択した場合、エンジントルクとモータ/ジェネレータ20のモータ又はジェネレータとしての出力で要求駆動力を発生させるように、エンジンECU101及びモータ/ジェネレータECU102に制御指令を送る。この場合、エンジントルクとモータ力行トルクの双方を用いるときには、エンジンECU101とモータ/ジェネレータECU102への制御指令として、例えば現状の変速段又は変速操作後の変速段でその要求駆動力を満足させるエンジントルクとモータ力行トルクの情報が夫々に送信される。これにより、そのエンジンECU101は、そのエンジントルクを発生させるようにエンジン10の制御を行い、モータ/ジェネレータECU102は、そのモータ力行トルクを発生させるようにモータ/ジェネレータ20への給電量を制御する。また、モータ/ジェネレータ20で電力の回生を行わせるときには、モータ/ジェネレータECU102に対してモータ/ジェネレータ20をジェネレータとして動作させるよう制御指令を送る。その際、例えば、エンジンECU101には、モータ回生トルクの分だけ増加させたエンジントルクの情報が送られる。
【0038】
また、シフトレバー81aがEV走行モード選択位置EVに操作されている場合、ハイブリッドECU100は、モータ力行トルクのみで要求駆動力を発生させるように、エンジンECU101及びモータ/ジェネレータECU102に制御指令を送る。この場合には、モータ/ジェネレータECU102への制御指令として、その要求駆動力を満足させるモータ力行トルクの情報が送信される。手動変速機30がニュートラル状態のときにエンジン10が動いていると、燃費を悪化させてしまうので、エンジンECU101には、燃費を向上させるべく、エンジン10の動作を停止させる制御指令を送る。更に、このEV走行モードにおいては、運転者がアクセルペダル91から足を離したとき又はブレーキ操作等でハイブリッド車両1の減速要求を行ったときに、モータ/ジェネレータECU102に対して回生制動できるよう制御指令を送らせてもよい。
【0039】
本実施例のハイブリッド車両1においては、運転者によるクラッチ50の操作と変速操作装置81の操作を契機にして、エンジン走行モード又はハイブリッド走行モードとEV走行モードとの間の切り替えが実行される。つまり、本実施例のクラッチ50、クラッチペダル51及び変速操作装置81は、運転者に走行モードを手動で選択させる為の走行モード選択装置であるとも云える。運転者は、エンジン走行モード又はハイブリッド走行モードからEV走行モードへと切り替える際、クラッチ50の解放操作、シフトレバー81aの変速位置1〜4からEV走行モード選択位置EVへの操作、クラッチ50の係合操作を順に行う。その際、ハイブリッドECU100の受信する検出信号は、変速位置検出部83の検出信号からEV走行モード選択位置検出部82の検出信号に変わる。一方、EV走行モードからエンジン走行モード又はハイブリッド走行モードへと切り替える際には、クラッチ50の解放操作、EV走行モード選択位置EVからシフトレバー81aの変速位置1〜4への操作、クラッチ50の係合操作が順に行われる。その際にハイブリッドECU100の受信する検出信号は、EV走行モード選択位置検出部82の検出信号から変速位置検出部83の検出信号に変わる。
【0040】
ところで、エンジン10やモータ/ジェネレータ20は、その仕様にも依るが、夫々に燃費性能の向上に適した運転効率の良い車速域を持っている。これが為、燃費性能を高める為には、運転効率の良い動力源を用いて走行させることが好ましい。このハイブリッド車両1では、エンジン10の運転効率とモータ/ジェネレータ20の運転効率とを車速毎に比べてみると、発進時、つまり低車速時において、エンジン10よりもモータ/ジェネレータ20の運転効率の方が優れている。また、低い車速域(例えば一般道を法定速度の範囲内で走行しているときの車速域)の定常走行時、つまり中車速時においても、モータ/ジェネレータ20の運転効率は、エンジン10よりも優れている。故に、低車速時や中車速時には、モータ/ジェネレータ20の出力を利用して走行させることで、エンジン10を回して走行させるよりも燃費性能が高くなる。一方、これ以外の車速域、つまり高車速時(高速走行時)には、モータ/ジェネレータ20よりもエンジン10の運転効率の方が優れており、エンジン10の出力を利用して走行させることで燃費性能が高くなる。
【0041】
そこで、この制御システムにおいては、EV走行モードが選択されたときに、その選択の際の車速がエンジン10よりもモータ/ジェネレータ20の方が運転効率に優れる車速域であれば、その運転者による選択の意思の通りにモータ/ジェネレータ20の動力を使って走行させる。一方、この制御システムにおいては、その選択の際の車速がモータ/ジェネレータ20よりもエンジン10の運転効率の方が優れている車速域であれば、燃費性能を向上させるべく、運転者に対してEV走行モードからエンジン10の動力を利用したエンジン走行モードやハイブリッド走行モードへの切り替えを促す。
【0042】
例えば、このハイブリッド車両1は、エンジン10の燃料消費量が多くなりがちな発進時のEV走行モードの使用が推奨されている。これが為、この制御システムには、発進時(低車速時)におけるEV走行モードのモータ/ジェネレータ20の出力特性マップ(図4)が用意されている。その発進時(低車速時)の出力特性マップは、回転数Nmg(車速V)が最も低いときにモータ力行トルクTmgの出力上限値を超えない範囲内で最大のモータ力行トルクTmgを発生させ、その回転数Nmg(車速V)が高くなるにつれて徐々にモータ力行トルクTmgを低下させていくという出力特性のものである。
【0043】
ここで、モータ/ジェネレータ20は、その回転数Nmg(車速V)が或る回転数Nmg1(車速V1)を超えるまでモータ力行トルクTmgを最大の出力上限値まで出力させることができ、その回転数Nmg1(車速V1)を超えるとモータ力行トルクTmgの出力上限値が徐々に低下していくものである。その出力上限値は、モータ/ジェネレータ20の仕様で異なる。このモータ/ジェネレータ20においては、その回転数Nmg1(車速V1)よりも低いときが発進時に相当する低車速時となる。
【0044】
この出力特性マップにおいては、発進動作(低車速)の終わる頃に、具体的には回転数Nmg(車速V)が所定回転数Nmg1(所定車速V1)を超えた辺りで0になるようモータ力行トルクTmgを低下させている。つまり、この出力特性マップでは、発進動作を終えるとモータ/ジェネレータ20からの出力が禁止される。この出力特性マップには、燃費性能を高めることのできる最大のモータ力行トルクTmgが設定されている。
【0045】
この場合の制御システムにおいては、EV走行モードが選択された際の車速V(車速センサ等の車速検出装置95で検出)が低車速域のときに(Nmg<Nmg1、V<V1)、発進時(低車速時)の出力特性マップを読み込み、その出力特性マップに応じたモータ力行トルクTmgをモータ/ジェネレータ20に出力させる。例えば、ハイブリッドECU100は、その出力特性マップでモータ/ジェネレータ20を制御させるようモータ/ジェネレータECU102に指令を送る。
【0046】
発進させる為にEV走行モードが選択されたときには、運転者のアクセル操作に伴い発進時(低車速時)の出力特性マップに応じたモータ力行トルクTmgが出力されて、ハイブリッド車両1が発進し始める。このときのハイブリッド車両1は、低車速域において、その出力特性マップに応じたモータ力行トルクTmgだけが出力されるので、燃費性能に優れたEV走行を行うことができる。
【0047】
ここで、その出力特性マップでは、低車速域が終わる頃(つまり発進の終わる頃)にモータ力行トルクTmgの出力が禁止される。これが為、その際には、運転者の加速要求に拘わらずハイブリッド車両1が減速し始めるので、運転者が違和感を覚える。一般に、手動変速機30の搭載された車両の運転者は、自らの加速要求に対して所望の加速度が得られない場合に、シフトレバー81aに手を掛けてダウンシフト操作を行うものである。つまり、この制御システムにおいては、そのモータ力行トルクTmgの出力を禁止させることによって、運転者にシフトレバー81aへ手を掛けさせる可能性を高めている。従って、この制御システムは、モータ/ジェネレータ20からの出力を禁止させることによって、運転者に対してEV走行モードからエンジン走行モード又はハイブリッド走行モードへの切り替えを促すことになる。その際には、モータ/ジェネレータ20からの出力の禁止と共に、下記の警報等を出力してもよい。
【0048】
ハイブリッドECU100には、モータ/ジェネレータ20からの出力を禁止させる前に、モータ力行トルクTmgが未だ出力されている車速Vの時点で、運転者に対してEV走行モードからエンジン走行モード又はハイブリッド走行モードへの切り替えを促させてもよい。例えば、その際には、車室内の音響装置96から警報を出力させたり、車室内の表示装置97にメッセージ等を表示させたりして、走行モードの切り替えを運転者に伝える。
【0049】
その違和感や警報等によって運転者が走行モードの切り替え操作を行ったならば、ハイブリッドECU100は、エンジン走行モード又はハイブリッド走行モードでの走行に切り替える。
【0050】
このハイブリッド車両1においては、中車速域においてもモータ/ジェネレータ20の方がエンジン10よりも運転効率に優れている。これが為、この制御システムには、中車速時におけるEV走行モードのモータ/ジェネレータ20の出力特性マップ(図5)も用意されている。中車速時には、発進時よりもモータ力行トルクTmgの出力上限値が低く、また、発進時ほどの大きい駆動力を必要としない。その中車速時の出力特性マップは、エンジン10よりもモータ/ジェネレータ20の運転効率の方が優れている車速域に加えて、EV走行モードにおける中車速時の運転者の操作性(例えばアクセルペダル91の踏み込みに対する応答性等)を考慮した余裕代分の車速域を含めている。ここでは、回転数Nmg(車速V)が所定回転数Nmg1(所定車速V1)よりも低い領域からモータ力行トルクTmgが徐々に立ち上がり、その所定回転数Nmg1(所定車速V1)を超えた辺りから出力上限値を超えない範囲内でモータ力行トルクTmgを略一定にし、中車速が終わりを迎えるにつれて徐々に0へとモータ力行トルクTmgを低下させていくという出力特性の出力特性マップにしている。つまり、この出力特性マップは、中車速域のみならず、低車速域や高車速域の一部でもモータ力行トルクTmgの出力ができるようになっている。この出力特性マップにおいても、燃費性能を高めることのできる最大のモータ力行トルクTmgが設定されている。この出力特性マップは、EV走行モードが選択された際の車速Vが中車速域以上(Nmg≧Nmg1、V≧V1)のときに用いる。
【0051】
この場合の制御システムにおいては、EV走行モードが選択された際の車速Vが中車速域のときに、中車速時の出力特性マップを読み込み、その出力特性マップに応じたモータ力行トルクTmgをモータ/ジェネレータ20に出力させる。従って、このハイブリッド車両1は、中車速域において、その出力特性マップに応じたモータ力行トルクTmgだけが出力されるので、燃費性能に優れたEV走行を行うことができる。
【0052】
このように、この制御システムは、EV走行モードが選択されたときのモータ/ジェネレータ20の出力可能領域を運転効率の良い車速域に制限し、車速Vがその車速域から外れたとき又は外れるときにエンジン走行モード又はハイブリッド走行モードへの切り替え操作を運転者に対して促す。これが為、ハイブリッド車両1は、エンジン10よりもモータ/ジェネレータ20の運転効率が良い車速域であれば、エンジン10よりも燃費性能に優れるモータ/ジェネレータ20の動力でEV走行でき、モータ/ジェネレータ20よりもエンジン10の運転効率が良い車速域であれば、モータ/ジェネレータ20よりも燃費性能に優れるエンジン10の動力を利用して走行できる。従って、このハイブリッド車両1は、様々な車速域で燃費走行を行うことができる。また、この制御システムは、EV走行モードが選択されたときのモータ/ジェネレータ20の出力可能領域にそのような制限を掛けているので、つまり車速Vが運転効率の良い車速域から外れたときにモータ/ジェネレータ20からの出力が禁止されるので、そのモータ/ジェネレータ20の使用頻度を抑えることができ、二次電池25の残存容量(SOC量)の低下を抑制することができる。
【0053】
この例示では、発進時(低車速時)の出力特性マップや中車速時の出力特性マップの高車速域側において、EV走行モードからの切り替え操作が行われないときに、モータ/ジェネレータ20からの出力を禁止させずに、運転者のアクセル操作量(アクセル開度センサ等のアクセル操作量検出装置92で検出)に応じたモータ力行トルクTmg等を出力させることも考えられる。しかしながら、そのようなモータ/ジェネレータ20の使用は、二次電池25の残存容量(SOC量)を減少させるので好ましくない。また、高車速域におけるモータ/ジェネレータ20の使用は、燃費性能の悪化をも招くことから好ましくない。従って、その際のモータ/ジェネレータ20の使用はできる限り避ける方が良いのだが、如何様に走行モードの切り替え操作を促しても操作が行われない可能性も考えられ、そのときには、ハイブリッド車両1が減速し、運転者が減速を望んでいなければ、運転者に違和感を与えるのみならず、ドライバビリティの悪化を招く。故に、運転者の違和感やドライバビリティの悪化を抑えつつSOC量の減少も抑えるべく、運転者のアクセル操作に応じたものよりも抑えた大きさのモータ力行トルクTmgを出力させることが好ましい。この抑制したモータ/ジェネレータ20からの出力により、運転者の違和感やドライバビリティの悪化、SOC量の減少を多少なりとも抑えつつ、アクセル操作に応じた要求に対する実際のハイブリッド車両1の動きの違いを運転者に感知させることができるので、この制御システムは、走行を継続させたままEV走行モードからの切り替え操作を更に促すことができる。
【0054】
ここで、中車速時の出力特性マップの低車速域側においては、EV走行モードからの切り替え操作を促しているにも拘わらず操作されないと、車速Vがモータ/ジェネレータ20の出力禁止領域(Tmg=0)まで低下する。ハイブリッド車両1は、かかる状況下で運転者が加速を試みても駆動力を発生させることができないので、加速できないままハイブリッド車両1が減速し続ける。これは、EV走行モードで使用する出力特性マップをEV走行モードが選択されたときの車速Vで選んでいるからであり、車速Vがモータ/ジェネレータ20の出力禁止領域まで落ちたときに対応できないからである。この制御システムにおいては、そのような事態を回避すべく、中車速時の出力特性マップから発進時(低車速時)の出力特性マップに切り替えさせる。
【0055】
例えば、この制御システムには、発進時(低車速時)と中車速時の夫々の出力特性マップにおけるモータ力行トルクTmgの交点において、中車速時の出力特性マップから発進時(低車速時)の出力特性マップへと切り替えさせる。その交点におけるモータ力行トルクTmgと車速Vは、予め求めておく。以下、その交点の車速Vを「特性変更車速Vch」という。
【0056】
中車速域での走行中にEV走行モードが選択された場合には、図6に示すように、中車速時の出力特性マップが選ばれる。このEV走行の最中に運転者がアクセルペダル91から足を離すと、ハイブリッド車両1は、減速し始めて、そのままの状態が続くことによりマップ上におけるモータ/ジェネレータ20の低車速域側の出力禁止領域が近づく。ハイブリッドECU100は、車速Vの下降中に、その車速Vが特性変更車速Vchまで下がったのか否か判定し、特性変更車速Vchまで到達していなければ、現状の中車速時の出力特性マップのままEV走行を継続させる。そして、このハイブリッドECU100は、車速Vが特性変更車速Vchまで下がったときに、中車速時の出力特性マップから発進時(低車速時)の出力特性マップに切り替える。これが為、その後でアクセルペダル91が踏まれたときには、その発進時(低車速時)の出力特性マップによるモータ力行トルクTmgでハイブリッド車両1を加速させることができる。
【0057】
このように、各出力特性マップにおける交点の特性変更車速Vchを境にして出力特性マップを切り替えさせることで、その切り替えに伴うモータ力行トルクTmgの変動を無くすことができる。従って、この制御システムは、出力特性マップの切り替えによる駆動力の変動を起こさないので、ピッチング変化等の違和感を運転者に与えない。更に、この制御システムは、燃費性能を高めることのできる範囲内で最大のモータ力行トルクTmgを出力特性マップの切り替え前後でも発生させることができ、切り替え後も燃費走行が可能になる。
【0058】
この場合、発進時(低車速時)の出力特性マップを用いて加速し続けると、この出力特性マップのモータ/ジェネレータ20の出力禁止領域まで車速Vが上昇する。これが為、この制御システムには、前述したように、EV走行モードからの切り替え操作を促させる。
【0059】
また、出力特性マップの切り替えは、次の様に行ってもよい。
【0060】
この場合の制御システムにおいては、図7に示すように、現状で選択されている中車速時の出力特性マップを最後まで(つまりモータ力行トルクTmgの出力が禁止になるまで)使ったEV走行を実行し、その出力特性マップでモータ力行トルクTmgを出力できなくなる車速(特性変更車速Vch)となったときに発進時(低車速時)の出力特性マップへと切り替える。これが為、この場合にも、その後でアクセルペダル91が踏まれたときには、その発進時(低車速時)の出力特性マップによるモータ力行トルクTmgでハイブリッド車両1を加速させることができる。
【0061】
このように、この場合には、先の例示よりも出力特性マップが切り替わるまでのヒステリシスが大きくなり、発進時と判断できる程度にまで車速Vが低下しないと出力特性マップの切り替えが行われないので、出力特性マップが切り替わったことを運転者が認識し易い。
【0062】
ここで、先の出力特性マップの切り替えの例示では、夫々の出力特性マップにおけるモータ力行トルクTmgの交点で切り替えを行うので、運転者によるアクセルペダル91の加速操作がその切り替えからの早い段階で行われるほど、その加速操作時から発進時(低車速時)の出力特性マップ上におけるモータ/ジェネレータ20の出力禁止領域に至るまでの車速差が小さくなる。これが為、このときには、発進時(低車速時)の出力特性マップによる加速時間が短くなる。これに対して、中車速時の出力特性マップを最後まで使ってから発進時(低車速時)の出力特性マップに切り替えることにより、その車速差を拡げることができるので、発進時(低車速時)の出力特性マップによる加速時間が長くなり、加速性を高めることができる。
【0063】
ここで例として挙げた出力特性マップ切り替えの2種類の形態は、中車速時の出力特性マップから発進時(低車速時)の出力特性マップへの切り替えのみを示した。これは、逆の切り替えを行うと、EV走行モードの使用時間を長引かせ、二次電池25の残存容量(SOC量)を大幅に低下させてしまう虞があるからである。しかしながら、前述した、SOC量の低下に目を瞑ってでも運転者の違和感やドライバビリティの悪化の抑制が求められるときには、モータ/ジェネレータ20からの出力の抑制に替えて、発進時(低車速時)の出力特性マップから中車速時の出力特性マップへの逆の切り替えを実行してもよい。
【産業上の利用可能性】
【0064】
以上のように、本発明に係る車両の制御システムは、運転効率の良い動力源による走行モードで走行させることのできる技術に有用である。
【符号の説明】
【0065】
1 ハイブリッド車両
10 エンジン
12 スタータモータ
20 モータ/ジェネレータ
25 二次電池
27 電池監視ユニット
30 手動変速機
50 クラッチ
51 クラッチペダル
60 歯車対(EVギア)
81 変速操作装置
81a シフトレバー
81b シフトゲージ
82 EV走行モード選択位置検出部
83 変速位置検出部
100 ハイブリッドECU
101 エンジンECU
102 モータ/ジェネレータECU
EV EV走行モード選択位置
【特許請求の範囲】
【請求項1】
機械エネルギを動力にして駆動力を発生させる機械動力源の動力を用いたエンジン走行モード、電気エネルギを変換した機械エネルギを動力にして駆動力を発生させる電気動力源の動力を用いたEV走行モード、又は前記機械動力源及び前記電気動力源の双方の動力を用いたハイブリッド走行モード、を運転者に手動で選択させる走行モード選択装置と、
運転者が前記走行モード選択装置により前記EV走行モードを選択した際の車速に応じて前記電気動力源の出力特性を設定し、該電気動力源よりも前記機械動力源の運転効率の方が優れているときに当該電気動力源からの出力を抑制又は禁止する電気動力源制御装置と、
を備えることを特徴とした車両の制御システム。
【請求項2】
前記電気動力源制御装置は、前記EV走行モードでの走行中に変化した車速に応じて、前記電気動力源の出力特性を前記EV走行モードの選択時の出力特性から変更することを特徴とした請求項1記載の車両の制御システム。
【請求項3】
前記電気動力源制御装置は、夫々の前記出力特性における前記電気動力源の出力の交点で出力特性の変更を行うことを特徴とした請求項2記載の車両の制御システム。
【請求項1】
機械エネルギを動力にして駆動力を発生させる機械動力源の動力を用いたエンジン走行モード、電気エネルギを変換した機械エネルギを動力にして駆動力を発生させる電気動力源の動力を用いたEV走行モード、又は前記機械動力源及び前記電気動力源の双方の動力を用いたハイブリッド走行モード、を運転者に手動で選択させる走行モード選択装置と、
運転者が前記走行モード選択装置により前記EV走行モードを選択した際の車速に応じて前記電気動力源の出力特性を設定し、該電気動力源よりも前記機械動力源の運転効率の方が優れているときに当該電気動力源からの出力を抑制又は禁止する電気動力源制御装置と、
を備えることを特徴とした車両の制御システム。
【請求項2】
前記電気動力源制御装置は、前記EV走行モードでの走行中に変化した車速に応じて、前記電気動力源の出力特性を前記EV走行モードの選択時の出力特性から変更することを特徴とした請求項1記載の車両の制御システム。
【請求項3】
前記電気動力源制御装置は、夫々の前記出力特性における前記電気動力源の出力の交点で出力特性の変更を行うことを特徴とした請求項2記載の車両の制御システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−62027(P2012−62027A)
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願番号】特願2010−210011(P2010−210011)
【出願日】平成22年9月17日(2010.9.17)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願日】平成22年9月17日(2010.9.17)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]