
車両の制御方法及び制御装置
【課題】回生制動装置10と油圧式制動装置30とを備えた車両において、回生制動が付与されている車輪21にスリップが発生したときに、G抜け感の発生を抑制しつつ、上記車輪21のスリップを出来る限り早期に解消する。
【解決手段】回生制動が付与されている少なくとも1つの車輪21のスリップ率が第1所定値以上になったときに、回生制動が付与されている全車輪21に対する回生制動装置10による回生制動力を第1速度で減少させかつ油圧式制動装置30による油圧制動力を増加させ、該油圧制動力の増加後に、スリップ率が上記第1所定値以上になった車輪21に対して、油圧式制動装置30によるアンチロックブレーキ動作を実行させ、回生制動装置30による回生制動力を第1速度で減少させているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更する。
【解決手段】回生制動が付与されている少なくとも1つの車輪21のスリップ率が第1所定値以上になったときに、回生制動が付与されている全車輪21に対する回生制動装置10による回生制動力を第1速度で減少させかつ油圧式制動装置30による油圧制動力を増加させ、該油圧制動力の増加後に、スリップ率が上記第1所定値以上になった車輪21に対して、油圧式制動装置30によるアンチロックブレーキ動作を実行させ、回生制動装置30による回生制動力を第1速度で減少させているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両制動時に車両の全車輪のうちの一部の車輪に対し回生制動を付与する回生制動装置と、車両制動時に上記全車輪に対し油圧制動を付与する油圧式制動装置とを備えた車両の制御方法及び制御装置に関する技術分野に属する。
【背景技術】
【0002】
近年、電気自動車等においては、車両のブレーキ装置として、車両の走行エネルギーをモータにより電気に変換することによって、車輪に対し回生制動を付与する回生制動装置と、油圧によりブレーキパッドをブレーキドラム又はブレーキディスクに押し付けることによって、車輪に対し油圧制動を付与する油圧式制動装置とを備えたものが知られている。油圧式制動装置は走行エネルギーを熱に変換するのに対して、回生制動装置は走行エネルギーを電気に変換する。この電気を蓄電して、これを車両駆動に利用することができるため、上記のように回生制動装置と油圧式制動装置とを備えた車両においては、燃費向上の観点から、回生制動装置による回生制動を出来る限り利用することが求められている。
【0003】
一方、車両制動時に、該車両の車輪のスリップ率が基準値以上になったときに、当該車輪にスリップが発生したと判定して、アンチロックブレーキ制御により、油圧式制動装置によるアンチロックブレーキ動作を実行し、これにより、車輪のスリップを解消するようにすることが知られている。そして、回生制動装置と油圧式制動装置とを備えた車両の制動時において、車輪にスリップが発生したときに、回生制動装置による回生制動力が大きいと、アンチロックブレーキ制御の制御性が低下してしまう。そこで、特許文献1では、これを回避するために、車輪にスリップが発生したときに、回生制動装置による回生制動力を減少させかつ油圧式制動装置による油圧制動力を増加させるようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−62590号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記特許文献1のように、車輪にスリップが発生したときに、単純に回生制動力を減少させかつ油圧制動力を増加させたのでは、以下のような問題が生じる。すなわち、回生制動力の減少は、インバータのスイッチング制御等により早急に行える一方、油圧制動力の増加には時間がかかる。このため、回生制動力の減少速度が速すぎると、車両減速度が急減する、いわゆるG抜け感が発生するという問題がある。一方、回生制動力の減少速度を遅くした場合には、G抜け感の発生は抑制されるが、回生制動力が直ぐには減少しないので、車輪のスリップを早期に解消することが困難になる。
【0006】
本発明は、斯かる点に鑑みてなされたものであり、その目的とするところは、回生制動装置と油圧式制動装置とを備えた車両において、回生制動が付与されている車輪にスリップが発生したときに、G抜け感の発生を抑制しつつ、車輪のスリップを出来る限り早期に解消しようとすることにある。
【課題を解決するための手段】
【0007】
上記の目的を達成するために、この発明では、車両制動時に車両の全車輪のうちの一部の車輪に対し回生制動を付与する回生制動装置と、車両制動時に上記全車輪に対し油圧制動を付与する油圧式制動装置とを備えた車両の制御方法を対象として、上記回生制動装置による回生制動時に、該回生制動が付与されている少なくとも1つの車輪のスリップ率が第1所定値以上になったときに、上記回生制動が付与されている全車輪に対する上記回生制動装置による回生制動力を第1速度で減少させかつ上記油圧式制動装置による油圧制動力を増加させるステップと、上記油圧制動力の増加後に、スリップ率が上記第1所定値以上になった上記車輪に対して、上記油圧式制動装置によるアンチロックブレーキ動作を実行させるステップと、上記回生制動装置による回生制動力が上記第1速度で減少しているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更するステップとを有しているものとする。
【0008】
このことにより、回生制動が付与されている車輪のスリップ率が第1所定値(回生制動が付与されていない車輪に対して油圧式制動装置によるアンチロックブレーキ動作を実行する値ないしそれに近い値)以上になったときに、回生制動が付与されている全車輪に対する回生制動力が第1速度で減少しかつ油圧制動力が増加する。上記第1速度を、出来る限り速い速度とすることで、回生制動力が素早く減少し、これにより、スリップ率が第1所定値以上になった車輪の車輪速の回復(スリップ率の減少)を図ることができる。ここで、回生制動力をそのまま第1速度で減少し続けたのでは、G抜け感が発生することになるが、所定条件が成立したときに、回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更することで、G抜け感の発生を抑制することができる。また、油圧制動力の増加後において、油圧制動力が、アンチロックブレーキ動作実行の効果が得られる程度に大きくなった時点でアンチロックブレーキ動作を実行することで、車輪速の更なる回復を図ることができる。よって、G抜け感の発生を抑制しつつ、車輪のスリップを早期に解消することが可能になる。ここで、上記所定条件としては、スリップ率が上記第1所定値以上になった上記車輪のスリップ率が、上記第1所定値以上になって以降初めて、上記第1所定値よりも低い値に設定された第2所定値に達したという条件や、回生制動力が上記第1速度で減少し始めてから所定時間(スリップした車輪のスリップ率が比較的小さくなりかつ油圧制動力が、アンチロックブレーキ動作実行の効果が得られる程度に大きくなる時間)が経過するという条件等が考えられる。
【0009】
上記車両の制御方法において、上記所定条件は、スリップ率が上記第1所定値以上になった上記車輪のスリップ率が、上記第1所定値以上になって以降初めて、上記第1所定値よりも低い値に設定された第2所定値に達したという条件である、ことが好ましい。
【0010】
このような条件が成立したときには、スリップした車輪のスリップ率が第2所定値に達して比較的小さくなっており、また、この時点では、油圧制動力が、アンチロックブレーキ動作実行の効果が得られる程度に大きくなっているので、このときに、回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更することで、スリップした車輪の車輪速をアンチロックブレーキ動作により確実に回復させながら、G抜け感の発生を効果的に抑制することができる。
【0011】
上記車両の制御方法において、上記油圧式制動装置の作動油の温度を検出又は推定するステップと、上記検出又は推定された作動油の温度が低いほど、上記第1速度及び上記第2速度を低速に設定するステップとを更に有している、ことが好ましい。
【0012】
すなわち、油圧式制動装置の作動油の温度が低いと、作動油の粘性が高くて作動油の油圧の増加速度(つまり油圧制動力の増加速度)が遅くなる傾向にあり、油圧制動力の増加速度が遅い場合に、回生制動力の減少速度を速くし過ぎると、G抜け感の発生を十分に抑制することができなくなる可能性があるが、作動油の温度が低いほど、上記第1速度及び上記第2速度を低速に設定することで、作動油の温度に関係なく常に、G抜け感の発生の抑制と車輪のスリップの早期解消との両立を図ることが可能になる。
【0013】
本発明の別の態様は、車両制動時に車両の全車輪のうちの一部の車輪に対し回生制動を付与する回生制動装置と、車両制動時に上記全車輪に対し油圧制動を付与する油圧式制動装置とを備えた車両の制御装置の発明であり、この発明では、上記回生制動装置による回生制動時に、該回生制動が付与されている少なくとも1つの車輪のスリップ率が第1所定値以上になったときに、上記回生制動が付与されている全車輪に対する上記回生制動装置による回生制動力を第1速度で減少させる回生制動力制御手段と、上記回生制動装置による回生制動時に、該回生制動が付与されている少なくとも1つの車輪のスリップ率が上記第1所定値以上になったときに、上記回生制動が付与されている全車輪に対する上記油圧式制動装置による油圧制動力を増加させるとともに、上記油圧制動力の増加後に、スリップ率が上記第1所定値以上になった上記車輪に対して、上記油圧式制動装置によるアンチロックブレーキ動作を実行させる油圧制動力制御手段とを備え、上記回生制動力制御手段は、上記回生制動装置による回生制動力を上記第1速度で減少させているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更するように構成されているものとする。
【0014】
この構成により、上記車両の制御方法の発明と同様に、G抜け感の発生を抑制しつつ、車輪のスリップを早期に解消することが可能になる。
【発明の効果】
【0015】
以上説明したように、本発明の車両の制御方法及び制御装置によると、回生制動が付与されている少なくとも1つの車輪のスリップ率が第1所定値以上になったときに、上記回生制動が付与されている全車輪に対する回生制動装置による回生制動力を第1速度で減少させかつ油圧式制動装置による油圧制動力を増加させ、該油圧制動力の増加後に、スリップ率が上記第1所定値以上になった上記車輪に対して、上記油圧式制動装置によるアンチロックブレーキ動作を実行させ、上記回生制動装置による回生制動力を第1速度で減少させているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更するようにしたことにより、G抜け感の発生を抑制しつつ、車輪のスリップを早期に解消することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態に係る制御装置が搭載された車両全体の概略構成を示す図である。
【図2】車両コントローラによる車両制動時の前輪に対する制動制御を示すフローチャートである。
【図3】車両制動時における、車速並びに前輪に対する回生制動力及び油圧制動力の変化を示すタイムチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態を図面に基づいて詳細に説明する。
【0018】
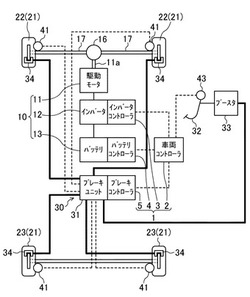
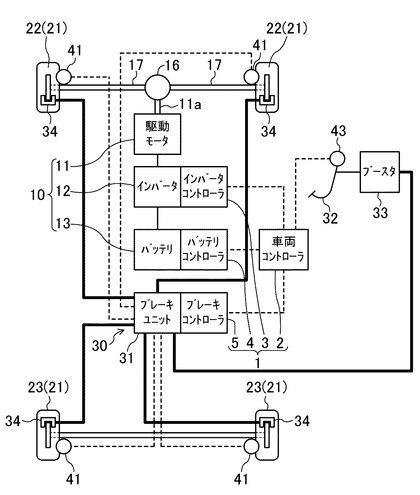
図1は、本発明の実施形態に係る制御装置1が搭載された車両(本実施形態では、電気自動車)全体の概略構成を示す。本実施形態では、上記制御装置1は、車両コントローラ2と、後述のインバータ12の作動を制御するインバータコントローラ3と、後述のバッテリ13の充放電を制御するバッテリコントローラ4と、後述のブレーキユニット31の作動を制御するブレーキコントローラ5とを含む。車両コントローラ2は、インバータコントローラ3、バッテリコントローラ4及びブレーキコントローラ5を統括して制御するコントローラであって、これら3つのコントローラ3〜5とそれぞれ相互に通信可能であり、各種情報の送受信を行う。尚、制御装置1を、このように4つのコントローラ2〜5で構成する必要はなく、1以上3以下のコントローラで構成することも可能である。
【0019】
上記各コントローラ2〜5は、周知のマイクロコンピュータをベースとするものであって、プログラムを実行する中央算出処理装置(CPU)と、例えばRAMやROMにより構成されてプログラムおよびデータを格納するメモリと、種々の信号の入出力を行うための入出力(I/O)バスとを含む。
【0020】
上記車両の前部には、当該車両を駆動するための駆動モータ11が配設されている。この駆動モータ11は3相交流モータであり、この駆動モータ11のステータには、U相、V相及びW相の各コイルが巻かれている。駆動モータ11(各コイル)は、インバータ12を介して、直流のバッテリ13と接続されている。インバータ12は、IGBT(Insulated Gate Bipolar Transistor)等のスイッチング素子を有しており、インバータコントローラ3が、上記各コイルに適切なタイミングで電流が供給されるように、上記スイッチング素子のON/OFFタイミングを制御する。このとき、バッテリコントローラ4は、バッテリ13からインバータ12に電流が供給されるように、不図示の充放電回路のスイッチのON/OFFを制御する。こうして、インバータ12は、バッテリ13から直流電力を入力して、その直流電力を交流電力に変換した後、その交流電力を駆動モータ11へ供給する。
【0021】
上記駆動モータ11のモータ軸11aは、差動ギヤを含む減速ギヤ16及び左右のドライブシャフト17を介して左右の前輪22と接続されており、これら前輪22は、駆動モータ11によって駆動される駆動輪とされている。一方、左右の後輪23は、非駆動輪(従動輪)とされている。本実施形態では、前輪22と後輪23とを区別しない場合には、それらを単に車輪21という。尚、左右の後輪23を、車両の走行状態に応じて必要時に駆動モータ11によって駆動される補助駆動輪とすることも可能である。また、左右の前輪22を非駆動輪又は補助駆動輪とし、左右の後輪23を駆動輪としてもよい。
【0022】
駆動モータ11は、インバータ12を介してバッテリ13から供給される電力に応じた駆動トルクを発生して、左右の前輪22(駆動輪)を駆動して、車両を走行させる。一方、上記車両の制動時(車両の運転者によってブレーキペダル32が踏まれているとき)には、駆動モータ11は、左右の前輪22からの駆動力によって発電することが可能である。この車両制動時に、インバータコントローラ3は、後述の如く車両コントローラ2により決められた回生制動力が得られる発電量でもって駆動モータ11が発電するように、上記スイッチング素子のON/OFFタイミングを制御する。このとき、バッテリコントローラ4は、その発電電力(回生電力)をバッテリ13に充電させるように、上記充放電回路のスイッチのON/OFFを制御する。
【0023】
上記駆動モータ11が回生電力を発電するとき、左右の前輪22には、その回転を制動しようとする回生制動(回生制動力)が同時に付与されることになる。左右の前輪22に付与される回生制動力は同じ値である。上記回生電力は、上記のようにバッテリ13に充電され、その充電量が多いほど、回生制動力が大きくなる。したがって、駆動モータ11、インバータ12及びバッテリ13は、車両制動時に車両の全車輪21のうちの一部の車輪21(本実施形態では、左右の前輪22)に対し回生制動を付与する回生制動装置10を構成することになる。尚、回生制動を付与する車輪21は、前輪22及び後輪23のうちのいずれか一方が駆動輪とされかつ他方が非駆動輪とされている場合には、駆動輪であるが、前輪22及び後輪23のうちのいずれか一方が駆動輪とされかつ他方が補助駆動輪とされている場合には、駆動輪及び補助駆動輪のうちのいずれか一方(つまり前輪22及び後輪23のうちのいずれか一方)に対し回生制動を付与する。
【0024】
ここで、バッテリ13の充電量には限界があり、その充電量の上限値はバッテリ13の充電状態(SOC)や温度等によって決まる。したがって、回生制動力の上限値は、バッテリ13の充電状態(SOC)や温度等によって決まることになる。上記回生制動力は、上記スイッチング素子のON/OFFタイミングの制御により、0と上記上限値との間で、自在に変更することが可能であり、回生制動力の増加速度及び減少速度も、0とかなり速い速度との間で、自在に変更することが可能である。
【0025】
上記バッテリコントローラ4には、バッテリ13の電圧を検出するバッテリ電圧センサ(図示せず)、バッテリ13に対して流出入する電流値を検出するバッテリ電流センサ(図示せず)による検出情報が入力され、バッテリコントローラ4は、これら入力情報に基づいて、バッテリ13の残容量(SOC)を演算し、この演算結果を、車両コントローラ2へ送信する。また、バッテリコントローラ4には、バッテリ13の温度を検出するバッテリ温度検出センサ(図示せず)による検出情報が入力され、バッテリコントローラ4は、その入力情報(バッテリの温度)を車両コントローラ2へ送信する。
【0026】
上記車両は、上記回生制動装置10に加えて、車両制動時に車両の全車輪21に対し油圧制動を付与する油圧式制動装置30を備えている。この油圧式制動装置30は、ポンプ及びバルブを含みかつこれらにより各車輪(油圧ブレーキ34)へ供給する油圧を調整するブレーキユニット31を有している。このブレーキユニット31には、ブレーキペダル32に接続されたブースター33から油圧が供給される。各車輪21には、ブレーキユニット31から供給された油圧により作動する油圧ブレーキ34がそれぞれ設けられており、各車輪21は、油圧ブレーキ34の作動により油圧制動されることになる。
【0027】
また、各車輪21には、車輪21の車輪速を検出する車輪速センサ41が設けられており、各車輪速センサ41による検出情報は、ブレーキコントローラ5に入力されるようになっている。
【0028】
ブレーキコントローラ5は、ブレーキユニット31のポンプ及びバルブの作動を制御して、各車輪21へ供給する油圧(つまり油圧制動力)を制御する。また、ブレーキコントローラ5は、各車輪速センサ41による検出情報から各車輪21のスリップ率を演算し、そのスリップ率の情報を、車両コントローラ2へ送信する。車両コントローラ2は、その受信したスリップ率が、予め設定された基準値以上になったときに、ブレーキコントローラ5に指令して、アンチロックブレーキ制御により、当該車輪21(スリップ率が基準値以上になった車輪21)に対して油圧式制動装置30によるアンチロックブレーキ動作(以下、ABS動作という)を実行させて、当該車輪21のスリップを解消するようにする。各車輪21のスリップ率は、例えば、各車輪21の車輪速センサ41の検出信号に基づいて車両の推定車速を求めた上で、その推定車速の車輪速換算値から、当該車輪21の実際の車輪速を引いた値を、推定車速の車輪速換算値で割ることによって求める。そして、車両コントローラ2は、車輪21のスリップ率が上記基準値以上になったとき、当該車輪21にスリップが発生したと判定して、ブレーキコントローラ5にアンチロックブレーキ制御を実行するように指令を出力する。これにより、ブレーキコントローラ5は、上記車輪21の圧式制動装置30によるABS動作を実行する。すなわち、ブレーキコントローラ5は、上記車輪21の油圧ブレーキ34への油圧を、減圧モード、保持モード及び増圧モードの繰り返し(最初は減圧モードとされる)により変化させて、当該車輪21のスリップ率を減少させる。尚、ブレーキコントローラ5自体が、車輪21のスリップ率が上記基準値以上になったときに、当該車輪21にスリップが発生したと判定して、当該車輪21に対してABS動作を実行するようにしてもよい。ここで、上記のようにスリップ率が上記基準値以上になったときに上記ABS動作が実行される車輪21は、後輪23、及び、回生制動が付与されていないときの前輪22である。制動要求が無くなる(後述のストロークセンサ43によるブレーキペダル32の踏み込み量が0になる)と、ABS動作は停止される。
【0029】
上記ブレーキペダル32には、車両の運転者のブレーキペダル32の踏み込み量、つまり運転者が要求する要求制動力を検出するストロークセンサ43が設けられており、このストロークセンサ43による検出情報が車両コントローラ2に入力されるようになっている。
【0030】
車両コントローラ2は、上記ストロークセンサ43による検出情報(要求制動力)を入力したときには、その要求制動力でもって制動を行うべく、各車輪21の必要制動力を決定する。また、前輪22については、回生制動装置10による回生制動力及び油圧式制動装置30による油圧制動力を決定して、回生制動力と油圧制動力との和が上記必要制動力になるようにする。回生制動力及び油圧制動力の決定は、回生制動力が出来る限り大きくなるようにする。すなわち、車両コントローラ2は、バッテリコントローラ4から送信された、バッテリ13のSOC及び温度の情報を受信して、それらの情報に基づいて充電量の上限値(つまり回生制動力の上限値)を求める。前輪22に対する必要制動力が、回生制動力の上限値以下である場合には、前輪22に対して、必要制動力に一致する回生制動力でもって回生制動を行う。一方、前輪22に対する必要制動力が、回生制動力の上限値を超えている場合には、前輪22に対して、回生制動力の上限値でもって回生制動を行うとともに、必要制動力から回生制動力の上限値を引いた値である油圧制動力でもって油圧制動を行う。尚、後輪23に対しては、必要制動力に一致する油圧制動力でもって油圧制動を行う。
【0031】
車両コントローラ2は、インバータコントローラ3、バッテリコントローラ4及びブレーキコントローラ5に指令して、各車輪21に対して、上記のようにして決定した制動力でもって制動がなされるように、インバータ12、上記充放電回路及びブレーキユニット31を作動させる。
【0032】
また、車両コントローラ2は、回生制動装置10による回生制動時に、該回生制動が付与されている少なくとも1つの車輪21(本実施形態では、前輪22)のスリップ率が、第1所定値以上になったときには、インバータコントローラ3及びブレーキコントローラ5に指令して、上記回生制動が付与されている全車輪21(本実施形態では、左右の前輪22)に対する回生制動装置10による回生制動力を第1速度で減少させかつ油圧式制動装置30による油圧制動力を増加させる。上記第1所定値は、回生制動が付与されていない車輪21に対して油圧式制動装置30によるABS動作を実行する値(つまり上記基準値)と同じであるか又はそれに近い値であって、スリップが発生したと判定可能な値である。また、上記第1速度は、出来る限り速い速度であって、回生制動力を素早く減少させて、スリップ率が上記第1所定値以上になった車輪21(前輪22)の車輪速を早期に回復させ得るような速度である。上記のように油圧制動力を増加させても、回生制動力が素早く減少するので、スリップが生じた前輪22のスリップ率を減少させることができる。油圧制動力の増加速度は、出来る限り速い速度であることが好ましい。しかし、現状では、この油圧制動力の増加速度は、上記第1速度よりもかなり小さくなる。
【0033】
また、車両コントローラ2は、上記のように回生制動装置10による回生制動時に、前輪22のスリップ率が上記第1所定値以上になったときの上記油圧制動力の増加後で、油圧制動力が、ABS動作実行の効果が得られる程度に大きくなったとき(本実施形態では、後述の所定条件が成立したとき)に、ブレーキコントローラ5に指令して、スリップ率が上記第1所定値以上になった車輪21(スリップが生じた前輪22)に対して、油圧式制動装置30によるABS動作を実行させる。このとき、繰り返される増圧モードの最大油圧制動力が、後の増圧モードほど大きくなるようにし、上記必要制動力まで増大させる。尚、後述の所定条件とは関係なく、油圧制動力の増加後で、油圧制動力が、予め設定された設定値(ABS動作によりスリップ率を減少させ得る値)以上になったときに、スリップ率が上記第1所定値以上になった車輪21に対してABS動作を実行させるようにしてもよい。
【0034】
ここで、左右の前輪22に対する回生制動力をそのまま第1速度で減少し続けたのでは、減速度が急減して、G抜け感が発生する。これは、油圧制動力の増加には時間がかかるため、油圧制動力が十分に増加しないうちに回生制動力が早急に小さくなるからである。
【0035】
そこで、本実施形態では、車両コントローラ2は、回生制動装置10による回生制動力が上記第1速度で減少しているときにおいて、所定条件が成立したときには、インバータコントローラ3に指令して、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更させる。この第2速度は、G抜け感の発生を抑制可能な速度である。
【0036】
上記所定条件としては、本実施形態では、スリップ率が上記第1所定値以上になった車輪21(スリップが生じた前輪22)のスリップ率が、上記第1所定値以上になって以降初めて、上記第1所定値よりも低い値に設定された第2所定値に達したという条件である。すなわち、この条件が成立したときには、スリップした前輪22のスリップ率が第2所定値に達して比較的小さくなっており、また、この時点では、油圧制動力が、ABS動作実行の効果が得られる程度に大きくなっているので、このときに、回生制動力の減少速度を、上記第1速度から上記第2速度に変更することで、スリップした前輪22の車輪速をABS動作により確実に回復させながら、G抜け感の発生を効果的に抑制することができる。
【0037】
尚、上記所定条件としては、上記のような条件に限らず、例えば、回生制動力が上記第1速度で減少し始めてから所定時間(スリップした前輪22のスリップ率が比較的小さくなりかつ油圧制動力が、ABS動作実行の効果が得られる程度に大きくなる時間)が経過するという条件であってもよい。
【0038】
上記第1及び第2所定値は、車両コントローラ2及びブレーキコントローラ5のうちの少なくとも一方のコントローラのメモリに予め記憶されている。
【0039】
上記第1及び第2速度は、車両コントローラ2及びインバータコントローラ5のうちの少なくとも一方のコントローラのメモリに予め記憶されている。これら第1及び第2速度は、各々、1つの値に固定されたものであってもよいが、例えば、油圧式制動装置30の作動油の温度に応じて変更してもよい。この場合、第1及び第2速度と作動油の温度との関係をテーブルとして上記メモリに予め記憶しておけばよい。
【0040】
上記作動油の温度は、例えば、ブレーキユニット31、又は、ブレーキユニット31から油圧ブレーキ34へ作動油を供給するための配管に設けた作動油温度検出センサ(図示せず)により検出するか、又は、車両外の温度(外気温度)を検出する外気温度センサ(図示せず)からの検出情報と、車両のイグニッションスイッチがONしてからの、油圧式制動装置30による制動履歴とに基づいて推定すればよい。
【0041】
そして、上記検出又は推定された作動油の温度が低いほど、上記第1速度及び上記第2速度を低速に設定する。すなわち、作動油の温度が低いと、作動油の粘性が高くて作動油の油圧の増加速度(つまり油圧制動力の増加速度)が遅くなる傾向にあり、油圧制動力の増加速度が遅い場合に、回生制動力の減少速度を速くし過ぎると、G抜け感の発生を十分に抑制することができなくなる可能性があるが、作動油の温度が低いほど、上記第1速度及び上記第2速度を低速に設定することで、作動油の温度に関係なく常に、G抜け感の発生の抑制と車輪21のスリップの早期解消との両立を図ることが可能になる。
【0042】
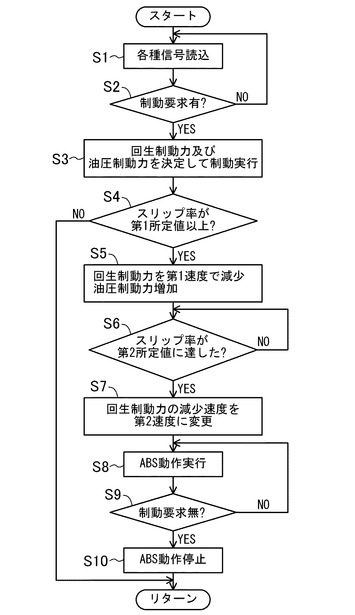
次に、車両コントローラ2による車両制動時の前輪22に対する制動制御について、図2のフローチャートを参照して説明する。
【0043】
最初のステップS1で、各種信号を読み込み、次のステップS2で、ストロークセンサ43により制動要求が有るか否かを判定する。このステップS2の判定がNOであるときには、ステップS1に戻る一方、ステップS2の判定がYESであるときには、ステップS3に進んで、ストロークセンサ43による要求制動力に基づいて、各車輪21の必要制動力を決定し、前輪22については、当該前輪22の必要制動力と、上記の如く求めた回生制動力の上限値とから、回生制動力及び油圧制動力(後輪の場合は油圧制動力のみ)を決定して、その制動力でもって回生制動及び油圧制動を実行する。
【0044】
次のステップS4では、前輪22のスリップ率が第1所定値以上であるか否かを判定し、このステップS4の判定がNOであるときには、そのままリターンする一方、ステップS4の判定がYESであるときには、ステップS5に進む。
【0045】
ステップS5では、左右の前輪22に対する回生制動力を第1速度で減少させかつ油圧制動力を増加させる。次のステップS6では、スリップが生じた前輪22のスリップ率が、上記第1所定値以上になって以降初めて第2所定値に達したか否かを判定する。このステップS6の判定がNOであるときには、ステップS6の動作を繰り返し、ステップS6の判定がYESになると、ステップS7に進む。
【0046】
ステップS7では、上記回生制動力の減少速度を第1速度から第2速度に変更し、次のステップS8で、スリップ率が上記第1所定値以上になった後に上記第2所定値に達した前輪22(スリップが生じた前輪22)に対してABS動作を実行する。
【0047】
次のステップS9では、制動要求が無くなったか否か、つまり、ストロークセンサ43によるブレーキペダル32の踏み込み量が0になったか否かを判定し、このステップS9の判定がNOであるときには、ステップS8に戻る一方、ステップS9の判定がYESであるときには、ステップS10に進む。
【0048】
ステップS10では、上記前輪22に対するABS動作を停止して、しかる後にリターンする。
【0049】
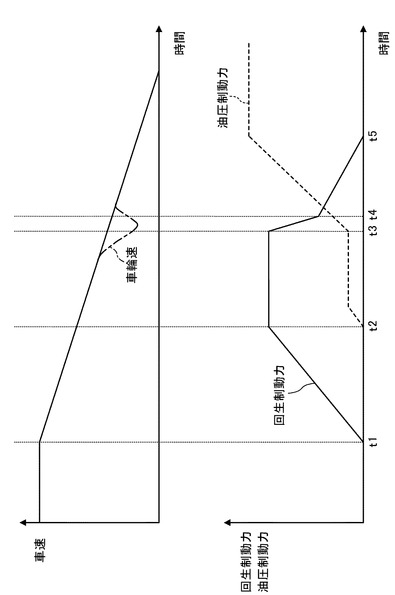
上記車両コントローラ2の制動制御により、車両制動時には、車速並びに前輪22に対する回生制動力及び油圧制動力が、図3のように変化する。
【0050】
すなわち、時刻t1で、制動が開始したとして、そこから、車両の運転者によりブレーキペダル32が踏み込まれていき、その踏み込み量に応じて、左右の前輪22に対する回生制動力が増大する。これに応じて、車速が次第に低下していく。
【0051】
時刻t2は、左右の前輪22に対する回生制動力が、バッテリ13のSOC及び温度により決まる上限値に達した時点である。このため、それ以降、回生制動力が増大することはなく、一定の値(回生制動力の上限値)とされ、必要制動力に対する不足分を油圧制動力で賄うことになる。
【0052】
上記回生制動時に、左右いずれか一方の前輪22にスリップが生じたとすると、その前輪22の車輪速が一点鎖線で示すように変化する。そして、時刻t3で、その前輪22のスリップ率が第1所定値に達すると、左右の前輪22に対する回生制動力が第1速度で減少するとともに、左右の前輪22に対する油圧制動力が増加する。この回生制動力の減少により、スリップが生じた前輪22のスリップ率は、第1所定値よりも高くなった後に減少し、やがて時刻t4で、第2所定値に達する。
【0053】
時刻t4では、上記回生制動力の減少速度が第2速度に変更される。また、図3では、図示は省略するが、時刻t4で、スリップが生じた前輪22に対してABS動作が実行される。すなわち、時刻t4で、油圧制動力が減少した後、一定に保持され、その後、増加し、これを繰り返す。このとき、繰り返される増圧モードの最大油圧制動力が、後の増圧モードほど大きくなる。ここで、図3に示す油圧制動力は、スリップが生じていない他方の前輪22に対するものであり、時刻t4以降も、時刻t3からt4までの増加速度と同じ速度で増加していき、必要制動力に達した時点で増加は停止する。ABS動作が実行される前輪22に対する上記増圧モード時の油圧制動力の増加速度も、時刻t3からt4までの増加速度と略同じ速度であり、スリップが生じなくなれば、その時点から、その増加速度で、必要制動力まで増大する。尚、時刻t4以降に、上記他方の前輪22にもスリップが生じてスリップ率が上記第1所定値以上になったときには、その時点で、上記他方の前輪22に対してもABS動作が実行される。また、時刻t3で、左右の前輪22のスリップ率が第1所定値以上になったときには、時刻t4で、左右の前輪22に対してABS動作が実行されることになる。
【0054】
時刻t5で、回生制動力が0になる。この時刻t5の時点ないしその付近で、上記他方の前輪22に対する油圧制動力が必要制動力に達していることが好ましい。言い換えれば、上記第2速度を、上記他方の前輪22に対する油圧制動力が必要制動力に達した時点ないしその付近で回生制動力が0になるような速度とするのがよい。
【0055】
本実施形態では、車両コントローラ2及びインバータコントローラ3が、本発明の回生制動力制御手段を構成し、車両コントローラ2及びブレーキコントローラ5が、本発明の油圧制動力制御手段を構成することになる。
【0056】
したがって、本実施形態では、回生制動装置10による回生制動力が第1速度で減少しているときにおいて、所定条件(本実施形態では、スリップ率が上記第1所定値以上になった前輪22のスリップ率が、上記第1所定値以上になって以降初めて、上記第1所定値よりも低い値に設定された第2所定値に達したという条件)が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更するようにしたので、以下のような作用効果が得られる。すなわち、上記第1速度が、比較的速い速度であるので、回生制動力が素早く減少し、これにより、スリップが生じた前輪22のスリップ率を減少させることができる。そして、回生制動力をそのまま第1速度で減少し続けたのでは、G抜け感が発生することになるが、上記所定条件が成立したときに、回生制動力の減少速度を第2速度に変更することで、G抜け感の発生を抑制することができる。また、回生制動力の減少速度を第2速度に変更した時点以降は、油圧制動力が、ABS動作実行の効果が得られる程度に大きくなっているので、ABS動作により上記前輪22のスリップ率を更に減少させることができる。よって、G抜け感の発生を抑制しつつ、上記前輪22のスリップを早期に解消することが可能になる。
【0057】
本発明は、上記実施形態に限られるものではなく、請求の範囲の主旨を逸脱しない範囲で代用が可能である。
【0058】
上述の実施形態は単なる例示に過ぎず、本発明の範囲を限定的に解釈してはならない。本発明の範囲は請求の範囲によって定義され、請求の範囲の均等範囲に属する変形や変更は、全て本発明の範囲内のものである。
【産業上の利用可能性】
【0059】
本発明は、車両制動時に車両の全車輪のうちの一部の車輪に対し回生制動を付与する回生制動装置と、車両制動時に上記全車輪に対し油圧制動を付与する油圧式制動装置とを備えた車両の制御方法及び制御装置に有用である。
【符号の説明】
【0060】
1 制御装置
2 車両コントローラ(回生制動力制御手段)(油圧制動力制御手段)
3 インバータコントローラ(回生制動力制御手段)
4 バッテリコントローラ
5 ブレーキコントローラ(油圧制動力制御手段)
10 回生制動装置
21 車輪
30 油圧式制動装置
31 ブレーキユニット
【技術分野】
【0001】
本発明は、車両制動時に車両の全車輪のうちの一部の車輪に対し回生制動を付与する回生制動装置と、車両制動時に上記全車輪に対し油圧制動を付与する油圧式制動装置とを備えた車両の制御方法及び制御装置に関する技術分野に属する。
【背景技術】
【0002】
近年、電気自動車等においては、車両のブレーキ装置として、車両の走行エネルギーをモータにより電気に変換することによって、車輪に対し回生制動を付与する回生制動装置と、油圧によりブレーキパッドをブレーキドラム又はブレーキディスクに押し付けることによって、車輪に対し油圧制動を付与する油圧式制動装置とを備えたものが知られている。油圧式制動装置は走行エネルギーを熱に変換するのに対して、回生制動装置は走行エネルギーを電気に変換する。この電気を蓄電して、これを車両駆動に利用することができるため、上記のように回生制動装置と油圧式制動装置とを備えた車両においては、燃費向上の観点から、回生制動装置による回生制動を出来る限り利用することが求められている。
【0003】
一方、車両制動時に、該車両の車輪のスリップ率が基準値以上になったときに、当該車輪にスリップが発生したと判定して、アンチロックブレーキ制御により、油圧式制動装置によるアンチロックブレーキ動作を実行し、これにより、車輪のスリップを解消するようにすることが知られている。そして、回生制動装置と油圧式制動装置とを備えた車両の制動時において、車輪にスリップが発生したときに、回生制動装置による回生制動力が大きいと、アンチロックブレーキ制御の制御性が低下してしまう。そこで、特許文献1では、これを回避するために、車輪にスリップが発生したときに、回生制動装置による回生制動力を減少させかつ油圧式制動装置による油圧制動力を増加させるようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−62590号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記特許文献1のように、車輪にスリップが発生したときに、単純に回生制動力を減少させかつ油圧制動力を増加させたのでは、以下のような問題が生じる。すなわち、回生制動力の減少は、インバータのスイッチング制御等により早急に行える一方、油圧制動力の増加には時間がかかる。このため、回生制動力の減少速度が速すぎると、車両減速度が急減する、いわゆるG抜け感が発生するという問題がある。一方、回生制動力の減少速度を遅くした場合には、G抜け感の発生は抑制されるが、回生制動力が直ぐには減少しないので、車輪のスリップを早期に解消することが困難になる。
【0006】
本発明は、斯かる点に鑑みてなされたものであり、その目的とするところは、回生制動装置と油圧式制動装置とを備えた車両において、回生制動が付与されている車輪にスリップが発生したときに、G抜け感の発生を抑制しつつ、車輪のスリップを出来る限り早期に解消しようとすることにある。
【課題を解決するための手段】
【0007】
上記の目的を達成するために、この発明では、車両制動時に車両の全車輪のうちの一部の車輪に対し回生制動を付与する回生制動装置と、車両制動時に上記全車輪に対し油圧制動を付与する油圧式制動装置とを備えた車両の制御方法を対象として、上記回生制動装置による回生制動時に、該回生制動が付与されている少なくとも1つの車輪のスリップ率が第1所定値以上になったときに、上記回生制動が付与されている全車輪に対する上記回生制動装置による回生制動力を第1速度で減少させかつ上記油圧式制動装置による油圧制動力を増加させるステップと、上記油圧制動力の増加後に、スリップ率が上記第1所定値以上になった上記車輪に対して、上記油圧式制動装置によるアンチロックブレーキ動作を実行させるステップと、上記回生制動装置による回生制動力が上記第1速度で減少しているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更するステップとを有しているものとする。
【0008】
このことにより、回生制動が付与されている車輪のスリップ率が第1所定値(回生制動が付与されていない車輪に対して油圧式制動装置によるアンチロックブレーキ動作を実行する値ないしそれに近い値)以上になったときに、回生制動が付与されている全車輪に対する回生制動力が第1速度で減少しかつ油圧制動力が増加する。上記第1速度を、出来る限り速い速度とすることで、回生制動力が素早く減少し、これにより、スリップ率が第1所定値以上になった車輪の車輪速の回復(スリップ率の減少)を図ることができる。ここで、回生制動力をそのまま第1速度で減少し続けたのでは、G抜け感が発生することになるが、所定条件が成立したときに、回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更することで、G抜け感の発生を抑制することができる。また、油圧制動力の増加後において、油圧制動力が、アンチロックブレーキ動作実行の効果が得られる程度に大きくなった時点でアンチロックブレーキ動作を実行することで、車輪速の更なる回復を図ることができる。よって、G抜け感の発生を抑制しつつ、車輪のスリップを早期に解消することが可能になる。ここで、上記所定条件としては、スリップ率が上記第1所定値以上になった上記車輪のスリップ率が、上記第1所定値以上になって以降初めて、上記第1所定値よりも低い値に設定された第2所定値に達したという条件や、回生制動力が上記第1速度で減少し始めてから所定時間(スリップした車輪のスリップ率が比較的小さくなりかつ油圧制動力が、アンチロックブレーキ動作実行の効果が得られる程度に大きくなる時間)が経過するという条件等が考えられる。
【0009】
上記車両の制御方法において、上記所定条件は、スリップ率が上記第1所定値以上になった上記車輪のスリップ率が、上記第1所定値以上になって以降初めて、上記第1所定値よりも低い値に設定された第2所定値に達したという条件である、ことが好ましい。
【0010】
このような条件が成立したときには、スリップした車輪のスリップ率が第2所定値に達して比較的小さくなっており、また、この時点では、油圧制動力が、アンチロックブレーキ動作実行の効果が得られる程度に大きくなっているので、このときに、回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更することで、スリップした車輪の車輪速をアンチロックブレーキ動作により確実に回復させながら、G抜け感の発生を効果的に抑制することができる。
【0011】
上記車両の制御方法において、上記油圧式制動装置の作動油の温度を検出又は推定するステップと、上記検出又は推定された作動油の温度が低いほど、上記第1速度及び上記第2速度を低速に設定するステップとを更に有している、ことが好ましい。
【0012】
すなわち、油圧式制動装置の作動油の温度が低いと、作動油の粘性が高くて作動油の油圧の増加速度(つまり油圧制動力の増加速度)が遅くなる傾向にあり、油圧制動力の増加速度が遅い場合に、回生制動力の減少速度を速くし過ぎると、G抜け感の発生を十分に抑制することができなくなる可能性があるが、作動油の温度が低いほど、上記第1速度及び上記第2速度を低速に設定することで、作動油の温度に関係なく常に、G抜け感の発生の抑制と車輪のスリップの早期解消との両立を図ることが可能になる。
【0013】
本発明の別の態様は、車両制動時に車両の全車輪のうちの一部の車輪に対し回生制動を付与する回生制動装置と、車両制動時に上記全車輪に対し油圧制動を付与する油圧式制動装置とを備えた車両の制御装置の発明であり、この発明では、上記回生制動装置による回生制動時に、該回生制動が付与されている少なくとも1つの車輪のスリップ率が第1所定値以上になったときに、上記回生制動が付与されている全車輪に対する上記回生制動装置による回生制動力を第1速度で減少させる回生制動力制御手段と、上記回生制動装置による回生制動時に、該回生制動が付与されている少なくとも1つの車輪のスリップ率が上記第1所定値以上になったときに、上記回生制動が付与されている全車輪に対する上記油圧式制動装置による油圧制動力を増加させるとともに、上記油圧制動力の増加後に、スリップ率が上記第1所定値以上になった上記車輪に対して、上記油圧式制動装置によるアンチロックブレーキ動作を実行させる油圧制動力制御手段とを備え、上記回生制動力制御手段は、上記回生制動装置による回生制動力を上記第1速度で減少させているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更するように構成されているものとする。
【0014】
この構成により、上記車両の制御方法の発明と同様に、G抜け感の発生を抑制しつつ、車輪のスリップを早期に解消することが可能になる。
【発明の効果】
【0015】
以上説明したように、本発明の車両の制御方法及び制御装置によると、回生制動が付与されている少なくとも1つの車輪のスリップ率が第1所定値以上になったときに、上記回生制動が付与されている全車輪に対する回生制動装置による回生制動力を第1速度で減少させかつ油圧式制動装置による油圧制動力を増加させ、該油圧制動力の増加後に、スリップ率が上記第1所定値以上になった上記車輪に対して、上記油圧式制動装置によるアンチロックブレーキ動作を実行させ、上記回生制動装置による回生制動力を第1速度で減少させているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更するようにしたことにより、G抜け感の発生を抑制しつつ、車輪のスリップを早期に解消することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態に係る制御装置が搭載された車両全体の概略構成を示す図である。
【図2】車両コントローラによる車両制動時の前輪に対する制動制御を示すフローチャートである。
【図3】車両制動時における、車速並びに前輪に対する回生制動力及び油圧制動力の変化を示すタイムチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態を図面に基づいて詳細に説明する。
【0018】
図1は、本発明の実施形態に係る制御装置1が搭載された車両(本実施形態では、電気自動車)全体の概略構成を示す。本実施形態では、上記制御装置1は、車両コントローラ2と、後述のインバータ12の作動を制御するインバータコントローラ3と、後述のバッテリ13の充放電を制御するバッテリコントローラ4と、後述のブレーキユニット31の作動を制御するブレーキコントローラ5とを含む。車両コントローラ2は、インバータコントローラ3、バッテリコントローラ4及びブレーキコントローラ5を統括して制御するコントローラであって、これら3つのコントローラ3〜5とそれぞれ相互に通信可能であり、各種情報の送受信を行う。尚、制御装置1を、このように4つのコントローラ2〜5で構成する必要はなく、1以上3以下のコントローラで構成することも可能である。
【0019】
上記各コントローラ2〜5は、周知のマイクロコンピュータをベースとするものであって、プログラムを実行する中央算出処理装置(CPU)と、例えばRAMやROMにより構成されてプログラムおよびデータを格納するメモリと、種々の信号の入出力を行うための入出力(I/O)バスとを含む。
【0020】
上記車両の前部には、当該車両を駆動するための駆動モータ11が配設されている。この駆動モータ11は3相交流モータであり、この駆動モータ11のステータには、U相、V相及びW相の各コイルが巻かれている。駆動モータ11(各コイル)は、インバータ12を介して、直流のバッテリ13と接続されている。インバータ12は、IGBT(Insulated Gate Bipolar Transistor)等のスイッチング素子を有しており、インバータコントローラ3が、上記各コイルに適切なタイミングで電流が供給されるように、上記スイッチング素子のON/OFFタイミングを制御する。このとき、バッテリコントローラ4は、バッテリ13からインバータ12に電流が供給されるように、不図示の充放電回路のスイッチのON/OFFを制御する。こうして、インバータ12は、バッテリ13から直流電力を入力して、その直流電力を交流電力に変換した後、その交流電力を駆動モータ11へ供給する。
【0021】
上記駆動モータ11のモータ軸11aは、差動ギヤを含む減速ギヤ16及び左右のドライブシャフト17を介して左右の前輪22と接続されており、これら前輪22は、駆動モータ11によって駆動される駆動輪とされている。一方、左右の後輪23は、非駆動輪(従動輪)とされている。本実施形態では、前輪22と後輪23とを区別しない場合には、それらを単に車輪21という。尚、左右の後輪23を、車両の走行状態に応じて必要時に駆動モータ11によって駆動される補助駆動輪とすることも可能である。また、左右の前輪22を非駆動輪又は補助駆動輪とし、左右の後輪23を駆動輪としてもよい。
【0022】
駆動モータ11は、インバータ12を介してバッテリ13から供給される電力に応じた駆動トルクを発生して、左右の前輪22(駆動輪)を駆動して、車両を走行させる。一方、上記車両の制動時(車両の運転者によってブレーキペダル32が踏まれているとき)には、駆動モータ11は、左右の前輪22からの駆動力によって発電することが可能である。この車両制動時に、インバータコントローラ3は、後述の如く車両コントローラ2により決められた回生制動力が得られる発電量でもって駆動モータ11が発電するように、上記スイッチング素子のON/OFFタイミングを制御する。このとき、バッテリコントローラ4は、その発電電力(回生電力)をバッテリ13に充電させるように、上記充放電回路のスイッチのON/OFFを制御する。
【0023】
上記駆動モータ11が回生電力を発電するとき、左右の前輪22には、その回転を制動しようとする回生制動(回生制動力)が同時に付与されることになる。左右の前輪22に付与される回生制動力は同じ値である。上記回生電力は、上記のようにバッテリ13に充電され、その充電量が多いほど、回生制動力が大きくなる。したがって、駆動モータ11、インバータ12及びバッテリ13は、車両制動時に車両の全車輪21のうちの一部の車輪21(本実施形態では、左右の前輪22)に対し回生制動を付与する回生制動装置10を構成することになる。尚、回生制動を付与する車輪21は、前輪22及び後輪23のうちのいずれか一方が駆動輪とされかつ他方が非駆動輪とされている場合には、駆動輪であるが、前輪22及び後輪23のうちのいずれか一方が駆動輪とされかつ他方が補助駆動輪とされている場合には、駆動輪及び補助駆動輪のうちのいずれか一方(つまり前輪22及び後輪23のうちのいずれか一方)に対し回生制動を付与する。
【0024】
ここで、バッテリ13の充電量には限界があり、その充電量の上限値はバッテリ13の充電状態(SOC)や温度等によって決まる。したがって、回生制動力の上限値は、バッテリ13の充電状態(SOC)や温度等によって決まることになる。上記回生制動力は、上記スイッチング素子のON/OFFタイミングの制御により、0と上記上限値との間で、自在に変更することが可能であり、回生制動力の増加速度及び減少速度も、0とかなり速い速度との間で、自在に変更することが可能である。
【0025】
上記バッテリコントローラ4には、バッテリ13の電圧を検出するバッテリ電圧センサ(図示せず)、バッテリ13に対して流出入する電流値を検出するバッテリ電流センサ(図示せず)による検出情報が入力され、バッテリコントローラ4は、これら入力情報に基づいて、バッテリ13の残容量(SOC)を演算し、この演算結果を、車両コントローラ2へ送信する。また、バッテリコントローラ4には、バッテリ13の温度を検出するバッテリ温度検出センサ(図示せず)による検出情報が入力され、バッテリコントローラ4は、その入力情報(バッテリの温度)を車両コントローラ2へ送信する。
【0026】
上記車両は、上記回生制動装置10に加えて、車両制動時に車両の全車輪21に対し油圧制動を付与する油圧式制動装置30を備えている。この油圧式制動装置30は、ポンプ及びバルブを含みかつこれらにより各車輪(油圧ブレーキ34)へ供給する油圧を調整するブレーキユニット31を有している。このブレーキユニット31には、ブレーキペダル32に接続されたブースター33から油圧が供給される。各車輪21には、ブレーキユニット31から供給された油圧により作動する油圧ブレーキ34がそれぞれ設けられており、各車輪21は、油圧ブレーキ34の作動により油圧制動されることになる。
【0027】
また、各車輪21には、車輪21の車輪速を検出する車輪速センサ41が設けられており、各車輪速センサ41による検出情報は、ブレーキコントローラ5に入力されるようになっている。
【0028】
ブレーキコントローラ5は、ブレーキユニット31のポンプ及びバルブの作動を制御して、各車輪21へ供給する油圧(つまり油圧制動力)を制御する。また、ブレーキコントローラ5は、各車輪速センサ41による検出情報から各車輪21のスリップ率を演算し、そのスリップ率の情報を、車両コントローラ2へ送信する。車両コントローラ2は、その受信したスリップ率が、予め設定された基準値以上になったときに、ブレーキコントローラ5に指令して、アンチロックブレーキ制御により、当該車輪21(スリップ率が基準値以上になった車輪21)に対して油圧式制動装置30によるアンチロックブレーキ動作(以下、ABS動作という)を実行させて、当該車輪21のスリップを解消するようにする。各車輪21のスリップ率は、例えば、各車輪21の車輪速センサ41の検出信号に基づいて車両の推定車速を求めた上で、その推定車速の車輪速換算値から、当該車輪21の実際の車輪速を引いた値を、推定車速の車輪速換算値で割ることによって求める。そして、車両コントローラ2は、車輪21のスリップ率が上記基準値以上になったとき、当該車輪21にスリップが発生したと判定して、ブレーキコントローラ5にアンチロックブレーキ制御を実行するように指令を出力する。これにより、ブレーキコントローラ5は、上記車輪21の圧式制動装置30によるABS動作を実行する。すなわち、ブレーキコントローラ5は、上記車輪21の油圧ブレーキ34への油圧を、減圧モード、保持モード及び増圧モードの繰り返し(最初は減圧モードとされる)により変化させて、当該車輪21のスリップ率を減少させる。尚、ブレーキコントローラ5自体が、車輪21のスリップ率が上記基準値以上になったときに、当該車輪21にスリップが発生したと判定して、当該車輪21に対してABS動作を実行するようにしてもよい。ここで、上記のようにスリップ率が上記基準値以上になったときに上記ABS動作が実行される車輪21は、後輪23、及び、回生制動が付与されていないときの前輪22である。制動要求が無くなる(後述のストロークセンサ43によるブレーキペダル32の踏み込み量が0になる)と、ABS動作は停止される。
【0029】
上記ブレーキペダル32には、車両の運転者のブレーキペダル32の踏み込み量、つまり運転者が要求する要求制動力を検出するストロークセンサ43が設けられており、このストロークセンサ43による検出情報が車両コントローラ2に入力されるようになっている。
【0030】
車両コントローラ2は、上記ストロークセンサ43による検出情報(要求制動力)を入力したときには、その要求制動力でもって制動を行うべく、各車輪21の必要制動力を決定する。また、前輪22については、回生制動装置10による回生制動力及び油圧式制動装置30による油圧制動力を決定して、回生制動力と油圧制動力との和が上記必要制動力になるようにする。回生制動力及び油圧制動力の決定は、回生制動力が出来る限り大きくなるようにする。すなわち、車両コントローラ2は、バッテリコントローラ4から送信された、バッテリ13のSOC及び温度の情報を受信して、それらの情報に基づいて充電量の上限値(つまり回生制動力の上限値)を求める。前輪22に対する必要制動力が、回生制動力の上限値以下である場合には、前輪22に対して、必要制動力に一致する回生制動力でもって回生制動を行う。一方、前輪22に対する必要制動力が、回生制動力の上限値を超えている場合には、前輪22に対して、回生制動力の上限値でもって回生制動を行うとともに、必要制動力から回生制動力の上限値を引いた値である油圧制動力でもって油圧制動を行う。尚、後輪23に対しては、必要制動力に一致する油圧制動力でもって油圧制動を行う。
【0031】
車両コントローラ2は、インバータコントローラ3、バッテリコントローラ4及びブレーキコントローラ5に指令して、各車輪21に対して、上記のようにして決定した制動力でもって制動がなされるように、インバータ12、上記充放電回路及びブレーキユニット31を作動させる。
【0032】
また、車両コントローラ2は、回生制動装置10による回生制動時に、該回生制動が付与されている少なくとも1つの車輪21(本実施形態では、前輪22)のスリップ率が、第1所定値以上になったときには、インバータコントローラ3及びブレーキコントローラ5に指令して、上記回生制動が付与されている全車輪21(本実施形態では、左右の前輪22)に対する回生制動装置10による回生制動力を第1速度で減少させかつ油圧式制動装置30による油圧制動力を増加させる。上記第1所定値は、回生制動が付与されていない車輪21に対して油圧式制動装置30によるABS動作を実行する値(つまり上記基準値)と同じであるか又はそれに近い値であって、スリップが発生したと判定可能な値である。また、上記第1速度は、出来る限り速い速度であって、回生制動力を素早く減少させて、スリップ率が上記第1所定値以上になった車輪21(前輪22)の車輪速を早期に回復させ得るような速度である。上記のように油圧制動力を増加させても、回生制動力が素早く減少するので、スリップが生じた前輪22のスリップ率を減少させることができる。油圧制動力の増加速度は、出来る限り速い速度であることが好ましい。しかし、現状では、この油圧制動力の増加速度は、上記第1速度よりもかなり小さくなる。
【0033】
また、車両コントローラ2は、上記のように回生制動装置10による回生制動時に、前輪22のスリップ率が上記第1所定値以上になったときの上記油圧制動力の増加後で、油圧制動力が、ABS動作実行の効果が得られる程度に大きくなったとき(本実施形態では、後述の所定条件が成立したとき)に、ブレーキコントローラ5に指令して、スリップ率が上記第1所定値以上になった車輪21(スリップが生じた前輪22)に対して、油圧式制動装置30によるABS動作を実行させる。このとき、繰り返される増圧モードの最大油圧制動力が、後の増圧モードほど大きくなるようにし、上記必要制動力まで増大させる。尚、後述の所定条件とは関係なく、油圧制動力の増加後で、油圧制動力が、予め設定された設定値(ABS動作によりスリップ率を減少させ得る値)以上になったときに、スリップ率が上記第1所定値以上になった車輪21に対してABS動作を実行させるようにしてもよい。
【0034】
ここで、左右の前輪22に対する回生制動力をそのまま第1速度で減少し続けたのでは、減速度が急減して、G抜け感が発生する。これは、油圧制動力の増加には時間がかかるため、油圧制動力が十分に増加しないうちに回生制動力が早急に小さくなるからである。
【0035】
そこで、本実施形態では、車両コントローラ2は、回生制動装置10による回生制動力が上記第1速度で減少しているときにおいて、所定条件が成立したときには、インバータコントローラ3に指令して、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更させる。この第2速度は、G抜け感の発生を抑制可能な速度である。
【0036】
上記所定条件としては、本実施形態では、スリップ率が上記第1所定値以上になった車輪21(スリップが生じた前輪22)のスリップ率が、上記第1所定値以上になって以降初めて、上記第1所定値よりも低い値に設定された第2所定値に達したという条件である。すなわち、この条件が成立したときには、スリップした前輪22のスリップ率が第2所定値に達して比較的小さくなっており、また、この時点では、油圧制動力が、ABS動作実行の効果が得られる程度に大きくなっているので、このときに、回生制動力の減少速度を、上記第1速度から上記第2速度に変更することで、スリップした前輪22の車輪速をABS動作により確実に回復させながら、G抜け感の発生を効果的に抑制することができる。
【0037】
尚、上記所定条件としては、上記のような条件に限らず、例えば、回生制動力が上記第1速度で減少し始めてから所定時間(スリップした前輪22のスリップ率が比較的小さくなりかつ油圧制動力が、ABS動作実行の効果が得られる程度に大きくなる時間)が経過するという条件であってもよい。
【0038】
上記第1及び第2所定値は、車両コントローラ2及びブレーキコントローラ5のうちの少なくとも一方のコントローラのメモリに予め記憶されている。
【0039】
上記第1及び第2速度は、車両コントローラ2及びインバータコントローラ5のうちの少なくとも一方のコントローラのメモリに予め記憶されている。これら第1及び第2速度は、各々、1つの値に固定されたものであってもよいが、例えば、油圧式制動装置30の作動油の温度に応じて変更してもよい。この場合、第1及び第2速度と作動油の温度との関係をテーブルとして上記メモリに予め記憶しておけばよい。
【0040】
上記作動油の温度は、例えば、ブレーキユニット31、又は、ブレーキユニット31から油圧ブレーキ34へ作動油を供給するための配管に設けた作動油温度検出センサ(図示せず)により検出するか、又は、車両外の温度(外気温度)を検出する外気温度センサ(図示せず)からの検出情報と、車両のイグニッションスイッチがONしてからの、油圧式制動装置30による制動履歴とに基づいて推定すればよい。
【0041】
そして、上記検出又は推定された作動油の温度が低いほど、上記第1速度及び上記第2速度を低速に設定する。すなわち、作動油の温度が低いと、作動油の粘性が高くて作動油の油圧の増加速度(つまり油圧制動力の増加速度)が遅くなる傾向にあり、油圧制動力の増加速度が遅い場合に、回生制動力の減少速度を速くし過ぎると、G抜け感の発生を十分に抑制することができなくなる可能性があるが、作動油の温度が低いほど、上記第1速度及び上記第2速度を低速に設定することで、作動油の温度に関係なく常に、G抜け感の発生の抑制と車輪21のスリップの早期解消との両立を図ることが可能になる。
【0042】
次に、車両コントローラ2による車両制動時の前輪22に対する制動制御について、図2のフローチャートを参照して説明する。
【0043】
最初のステップS1で、各種信号を読み込み、次のステップS2で、ストロークセンサ43により制動要求が有るか否かを判定する。このステップS2の判定がNOであるときには、ステップS1に戻る一方、ステップS2の判定がYESであるときには、ステップS3に進んで、ストロークセンサ43による要求制動力に基づいて、各車輪21の必要制動力を決定し、前輪22については、当該前輪22の必要制動力と、上記の如く求めた回生制動力の上限値とから、回生制動力及び油圧制動力(後輪の場合は油圧制動力のみ)を決定して、その制動力でもって回生制動及び油圧制動を実行する。
【0044】
次のステップS4では、前輪22のスリップ率が第1所定値以上であるか否かを判定し、このステップS4の判定がNOであるときには、そのままリターンする一方、ステップS4の判定がYESであるときには、ステップS5に進む。
【0045】
ステップS5では、左右の前輪22に対する回生制動力を第1速度で減少させかつ油圧制動力を増加させる。次のステップS6では、スリップが生じた前輪22のスリップ率が、上記第1所定値以上になって以降初めて第2所定値に達したか否かを判定する。このステップS6の判定がNOであるときには、ステップS6の動作を繰り返し、ステップS6の判定がYESになると、ステップS7に進む。
【0046】
ステップS7では、上記回生制動力の減少速度を第1速度から第2速度に変更し、次のステップS8で、スリップ率が上記第1所定値以上になった後に上記第2所定値に達した前輪22(スリップが生じた前輪22)に対してABS動作を実行する。
【0047】
次のステップS9では、制動要求が無くなったか否か、つまり、ストロークセンサ43によるブレーキペダル32の踏み込み量が0になったか否かを判定し、このステップS9の判定がNOであるときには、ステップS8に戻る一方、ステップS9の判定がYESであるときには、ステップS10に進む。
【0048】
ステップS10では、上記前輪22に対するABS動作を停止して、しかる後にリターンする。
【0049】
上記車両コントローラ2の制動制御により、車両制動時には、車速並びに前輪22に対する回生制動力及び油圧制動力が、図3のように変化する。
【0050】
すなわち、時刻t1で、制動が開始したとして、そこから、車両の運転者によりブレーキペダル32が踏み込まれていき、その踏み込み量に応じて、左右の前輪22に対する回生制動力が増大する。これに応じて、車速が次第に低下していく。
【0051】
時刻t2は、左右の前輪22に対する回生制動力が、バッテリ13のSOC及び温度により決まる上限値に達した時点である。このため、それ以降、回生制動力が増大することはなく、一定の値(回生制動力の上限値)とされ、必要制動力に対する不足分を油圧制動力で賄うことになる。
【0052】
上記回生制動時に、左右いずれか一方の前輪22にスリップが生じたとすると、その前輪22の車輪速が一点鎖線で示すように変化する。そして、時刻t3で、その前輪22のスリップ率が第1所定値に達すると、左右の前輪22に対する回生制動力が第1速度で減少するとともに、左右の前輪22に対する油圧制動力が増加する。この回生制動力の減少により、スリップが生じた前輪22のスリップ率は、第1所定値よりも高くなった後に減少し、やがて時刻t4で、第2所定値に達する。
【0053】
時刻t4では、上記回生制動力の減少速度が第2速度に変更される。また、図3では、図示は省略するが、時刻t4で、スリップが生じた前輪22に対してABS動作が実行される。すなわち、時刻t4で、油圧制動力が減少した後、一定に保持され、その後、増加し、これを繰り返す。このとき、繰り返される増圧モードの最大油圧制動力が、後の増圧モードほど大きくなる。ここで、図3に示す油圧制動力は、スリップが生じていない他方の前輪22に対するものであり、時刻t4以降も、時刻t3からt4までの増加速度と同じ速度で増加していき、必要制動力に達した時点で増加は停止する。ABS動作が実行される前輪22に対する上記増圧モード時の油圧制動力の増加速度も、時刻t3からt4までの増加速度と略同じ速度であり、スリップが生じなくなれば、その時点から、その増加速度で、必要制動力まで増大する。尚、時刻t4以降に、上記他方の前輪22にもスリップが生じてスリップ率が上記第1所定値以上になったときには、その時点で、上記他方の前輪22に対してもABS動作が実行される。また、時刻t3で、左右の前輪22のスリップ率が第1所定値以上になったときには、時刻t4で、左右の前輪22に対してABS動作が実行されることになる。
【0054】
時刻t5で、回生制動力が0になる。この時刻t5の時点ないしその付近で、上記他方の前輪22に対する油圧制動力が必要制動力に達していることが好ましい。言い換えれば、上記第2速度を、上記他方の前輪22に対する油圧制動力が必要制動力に達した時点ないしその付近で回生制動力が0になるような速度とするのがよい。
【0055】
本実施形態では、車両コントローラ2及びインバータコントローラ3が、本発明の回生制動力制御手段を構成し、車両コントローラ2及びブレーキコントローラ5が、本発明の油圧制動力制御手段を構成することになる。
【0056】
したがって、本実施形態では、回生制動装置10による回生制動力が第1速度で減少しているときにおいて、所定条件(本実施形態では、スリップ率が上記第1所定値以上になった前輪22のスリップ率が、上記第1所定値以上になって以降初めて、上記第1所定値よりも低い値に設定された第2所定値に達したという条件)が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更するようにしたので、以下のような作用効果が得られる。すなわち、上記第1速度が、比較的速い速度であるので、回生制動力が素早く減少し、これにより、スリップが生じた前輪22のスリップ率を減少させることができる。そして、回生制動力をそのまま第1速度で減少し続けたのでは、G抜け感が発生することになるが、上記所定条件が成立したときに、回生制動力の減少速度を第2速度に変更することで、G抜け感の発生を抑制することができる。また、回生制動力の減少速度を第2速度に変更した時点以降は、油圧制動力が、ABS動作実行の効果が得られる程度に大きくなっているので、ABS動作により上記前輪22のスリップ率を更に減少させることができる。よって、G抜け感の発生を抑制しつつ、上記前輪22のスリップを早期に解消することが可能になる。
【0057】
本発明は、上記実施形態に限られるものではなく、請求の範囲の主旨を逸脱しない範囲で代用が可能である。
【0058】
上述の実施形態は単なる例示に過ぎず、本発明の範囲を限定的に解釈してはならない。本発明の範囲は請求の範囲によって定義され、請求の範囲の均等範囲に属する変形や変更は、全て本発明の範囲内のものである。
【産業上の利用可能性】
【0059】
本発明は、車両制動時に車両の全車輪のうちの一部の車輪に対し回生制動を付与する回生制動装置と、車両制動時に上記全車輪に対し油圧制動を付与する油圧式制動装置とを備えた車両の制御方法及び制御装置に有用である。
【符号の説明】
【0060】
1 制御装置
2 車両コントローラ(回生制動力制御手段)(油圧制動力制御手段)
3 インバータコントローラ(回生制動力制御手段)
4 バッテリコントローラ
5 ブレーキコントローラ(油圧制動力制御手段)
10 回生制動装置
21 車輪
30 油圧式制動装置
31 ブレーキユニット
【特許請求の範囲】
【請求項1】
車両制動時に車両の全車輪のうちの一部の車輪に対し回生制動を付与する回生制動装置と、車両制動時に上記全車輪に対し油圧制動を付与する油圧式制動装置とを備えた車両の制御方法であって、
上記回生制動装置による回生制動時に、該回生制動が付与されている少なくも1つの車輪のスリップ率が第1所定値以上になったときに、上記回生制動が付与されている全車輪に対する上記回生制動装置による回生制動力を第1速度で減少させかつ上記油圧式制動装置による油圧制動力を増加させるステップと、
上記油圧制動力の増加後に、スリップ率が上記第1所定値以上になった上記車輪に対して、上記油圧式制動装置によるアンチロックブレーキ動作を実行させるステップと、
上記回生制動装置による回生制動力が上記第1速度で減少しているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更するステップとを有していることを特徴とする車両の制御方法。
【請求項2】
請求項1記載の車両の制御方法において、
上記所定条件は、スリップ率が上記第1所定値以上になった上記車輪のスリップ率が、上記第1所定値以上になって以降初めて、上記第1所定値よりも低い値に設定された第2所定値に達したという条件であることを特徴とする車両の制御方法。
【請求項3】
請求項1又は2記載の車両の制御方法において、
上記油圧式制動装置の作動油の温度を検出又は推定するステップと、
上記検出又は推定された作動油の温度が低いほど、上記第1速度及び上記第2速度を低速に設定するステップとを更に有していることを特徴とする車両の制御方法。
【請求項4】
車両制動時に車両の全車輪のうちの一部の車輪に対し回生制動を付与する回生制動装置と、車両制動時に上記全車輪に対し油圧制動を付与する油圧式制動装置とを備えた車両の制御装置であって、
上記回生制動装置による回生制動時に、該回生制動が付与されている少なくとも1つの車輪のスリップ率が第1所定値以上になったときに、上記回生制動が付与されている全車輪に対する上記回生制動装置による回生制動力を第1速度で減少させる回生制動力制御手段と、
上記回生制動装置による回生制動時に、該回生制動が付与されている少なくとも1つの車輪のスリップ率が上記第1所定値以上になったときに、上記回生制動が付与されている全車輪に対する上記油圧式制動装置による油圧制動力を増加させるとともに、上記油圧制動力の増加後に、スリップ率が上記第1所定値以上になった上記車輪に対して、上記油圧式制動装置によるアンチロックブレーキ動作を実行させる油圧制動力制御手段とを備え、
上記回生制動力制御手段は、上記回生制動装置による回生制動力を上記第1速度で減少させているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更するように構成されていることを特徴とする車両の制御装置。
【請求項1】
車両制動時に車両の全車輪のうちの一部の車輪に対し回生制動を付与する回生制動装置と、車両制動時に上記全車輪に対し油圧制動を付与する油圧式制動装置とを備えた車両の制御方法であって、
上記回生制動装置による回生制動時に、該回生制動が付与されている少なくも1つの車輪のスリップ率が第1所定値以上になったときに、上記回生制動が付与されている全車輪に対する上記回生制動装置による回生制動力を第1速度で減少させかつ上記油圧式制動装置による油圧制動力を増加させるステップと、
上記油圧制動力の増加後に、スリップ率が上記第1所定値以上になった上記車輪に対して、上記油圧式制動装置によるアンチロックブレーキ動作を実行させるステップと、
上記回生制動装置による回生制動力が上記第1速度で減少しているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更するステップとを有していることを特徴とする車両の制御方法。
【請求項2】
請求項1記載の車両の制御方法において、
上記所定条件は、スリップ率が上記第1所定値以上になった上記車輪のスリップ率が、上記第1所定値以上になって以降初めて、上記第1所定値よりも低い値に設定された第2所定値に達したという条件であることを特徴とする車両の制御方法。
【請求項3】
請求項1又は2記載の車両の制御方法において、
上記油圧式制動装置の作動油の温度を検出又は推定するステップと、
上記検出又は推定された作動油の温度が低いほど、上記第1速度及び上記第2速度を低速に設定するステップとを更に有していることを特徴とする車両の制御方法。
【請求項4】
車両制動時に車両の全車輪のうちの一部の車輪に対し回生制動を付与する回生制動装置と、車両制動時に上記全車輪に対し油圧制動を付与する油圧式制動装置とを備えた車両の制御装置であって、
上記回生制動装置による回生制動時に、該回生制動が付与されている少なくとも1つの車輪のスリップ率が第1所定値以上になったときに、上記回生制動が付与されている全車輪に対する上記回生制動装置による回生制動力を第1速度で減少させる回生制動力制御手段と、
上記回生制動装置による回生制動時に、該回生制動が付与されている少なくとも1つの車輪のスリップ率が上記第1所定値以上になったときに、上記回生制動が付与されている全車輪に対する上記油圧式制動装置による油圧制動力を増加させるとともに、上記油圧制動力の増加後に、スリップ率が上記第1所定値以上になった上記車輪に対して、上記油圧式制動装置によるアンチロックブレーキ動作を実行させる油圧制動力制御手段とを備え、
上記回生制動力制御手段は、上記回生制動装置による回生制動力を上記第1速度で減少させているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更するように構成されていることを特徴とする車両の制御装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−43495(P2013−43495A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−181182(P2011−181182)
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
[ Back to top ]