
車両の制御装置、車両及び原動機
【課題】ブリッピング操作による変速期間中のショックを抑制すると共に、変速期間後にアクセルの操作に応じた動作に迅速に移ることが可能な車両の制御装置を提供する。
【解決手段】本発明の車両の制御装置は、アクセルの操作量に基づいてスロットルバルブの開度を決定する開度決定部57と、エンジンの回転速度の下降を伴う変速期間中において、スロットルバルブの開度が、伝達経路からエンジンに入力される負荷トルクよりも出力トルクが大きくなる値から、出力トルクと負荷トルクとが等しくなる境界値に向かって変化する場合に、スロットルバルブの開度の時間変化率を低減する変化抑制部59と、を備える。
【解決手段】本発明の車両の制御装置は、アクセルの操作量に基づいてスロットルバルブの開度を決定する開度決定部57と、エンジンの回転速度の下降を伴う変速期間中において、スロットルバルブの開度が、伝達経路からエンジンに入力される負荷トルクよりも出力トルクが大きくなる値から、出力トルクと負荷トルクとが等しくなる境界値に向かって変化する場合に、スロットルバルブの開度の時間変化率を低減する変化抑制部59と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の制御装置、車両及び原動機に関し、特には、ツインクラッチ式の車両における変速制御に関する。
【背景技術】
【0002】
従来、ツインクラッチ式の車両が知られている(特許文献1を参照)。ツインクラッチ式の車両は、エンジンの下流に配置され、エンジンの出力トルクが個別に入力される2つのクラッチと、各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、を備えている。変速期間中には、出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、エンジンの出力トルクとクラッチのトルク容量とに差を設けてエンジンの回転速度を変化させる回転制御と、が実行される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−251456号公報
【特許文献2】特開平6−330777号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自動二輪車等の車両では、マニュアル変速に慣れた運転者が、無意識のうちに、アップシフト変速時に一時的にアクセルを閉じる操作をしたり、ダウンシフト変速時に一時的にアクセルを開ける操作をすることがある。こうした操作は、ブリッピング操作と呼ばれる。
【0005】
しかしながら、ツインクラッチ式の車両では、何れかのクラッチが係合している上、回転制御においてエンジンの回転速度を変化させていることから、運転者によるブリッピング操作は不要であるのにも関わらず、ブリッピング操作が行われることがある。例えば、アップシフト変速時にアクセルを閉じるブリッピング操作が行われると、エンジンの出力トルクが下降し、駆動状態から被駆動状態に逆転してショックが生じるおそれがある。また、ダウンシフト変速時にアクセルを開けるブリッピング操作が行われると、エンジンの出力トルクが上昇し、被駆動状態から駆動状態に逆転してショックが生じるおそれがある。ここで、駆動状態とは、エンジンから伝達経路に出力される出力トルクが、伝達経路からエンジンに入力される負荷トルクよりも大きいことをいい、被駆動状態とはその逆をいう。
【0006】
また、こうしたブリッピング操作による変速期間中のショックを抑制するため、変速期間中にはスロットルバルブの開度をアクセルの操作量に追従させない方法が考えられる。しかしながら、この方法では、運転者によるアクセルの操作がブリッピング操作ではなかった場合に、変速期間の終了後にアクセルの操作に対するスロットルバルブの開度の追従が遅れてしまうおそれがある。
【0007】
なお、特許文献2には、ダウンシフト変速時にパワーオン状態(出力トルクが負荷トルクよりも大きい状態)を維持するために、スロットルバルブの開度をアクセルの操作量に追従させないことが記載されている。すなわち、車両停止直前のダウンシフト変速がパワーオン状態とパワーオフ状態との境界付近で行われ、変速によりエンジンの回転速度が上昇すると、パワーオン状態からパワーオフ状態に逆転しやすいことから、スロットルバルブの開度が固定される。このように、特許文献2における課題は、上述したブリッピング操作に起因する課題とは異なっている。また、特許文献2に記載された自動変速機では、そもそも運転者がブリッピング操作をするとは考え難い。
【0008】
本発明は、上記実情に鑑みて為されたものであり、ブリッピング操作による変速期間中のショックを抑制すると共に、変速期間後にアクセルの操作に応じた動作に迅速に移ることが可能な車両の制御装置、車両及び原動機を提供することを主な目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するため、本発明の車両の制御装置は、エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられる。前記制御装置は、前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する。前記制御装置は、前記アクセルの操作量に基づいて前記出力トルクの目標値を決定する目標値決定部と、前記エンジンの回転速度の下降を伴う前記変速期間中において、前記出力トルクの目標値が、前記伝達経路から前記エンジンに入力される負荷トルクよりも大きい値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記出力トルクの目標値の時間変化率を低減する変化抑制部と、を備える。
【0010】
また、本発明の車両の制御装置は、エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられる。前記制御装置は、前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する。前記制御装置は、前記アクセルの操作量に基づいて前記出力トルクの目標値を決定する目標値決定部と、前記エンジンの回転速度の上昇を伴う前記変速期間中において、前記出力トルクの目標値が、前記伝達経路から前記エンジンに入力される負荷トルクよりも小さい値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記出力トルクの目標値の時間変化率を低減する変化抑制部と、を備える。
【0011】
また、本発明の車両の制御装置は、エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられる。前記制御装置は、前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する。前記制御装置は、前記アクセルの操作量に基づいて前記スロットルバルブの開度を決定する開度決定部と、前記エンジンの回転速度の下降を伴う前記変速期間中において、前記スロットルバルブの開度が、前記伝達経路から前記エンジンに入力される負荷トルクよりも前記出力トルクが大きくなる値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記スロットルバルブの開度の時間変化率を低減する変化抑制部と、を備える。
【0012】
また、本発明の車両の制御装置は、エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられる。前記制御装置は、前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する。前記制御装置は、前記アクセルの操作量に基づいて前記スロットルバルブの開度を決定する開度決定部と、前記エンジンの回転速度の上昇を伴う前記変速期間中において、前記スロットルバルブの開度が、前記伝達経路から前記エンジンに入力される負荷トルクよりも前記出力トルクが小さくなる値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記スロットルバルブの開度の時間変化率を低減する変化抑制部と、を備える。
【0013】
また、本発明の車両は、上記制御装置を備える。また、本発明の原動機は、上記制御装置を備える。
【発明の効果】
【0014】
本発明によると、変速期間中に駆動状態と被駆動状態とが逆転することが抑制されるので、この結果、ブリッピング操作による変速期間中のショックを抑制することが可能である。また、変速期間中に出力トルクの目標値またはスロットルバルブの開度を固定することなく、時間変化率を低減することで、変速期間後にアクセルの操作に応じた動作に迅速に移ることが可能である。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施形態に係る制御装置を備えた自動二輪車の側面図である。
【図2】上記自動二輪車のエンジンから後輪に至るトルク伝達経路に設けられた機構の概略図である。
【図3】上記自動二輪車の構成を示すブロック図である。
【図4】変速制御の概要を説明するための図である。
【図5】変速制御の複数の制御モードを示す図である。
【図6A】第1の制御モードの例を説明するためのタイムチャートである。
【図6B】第2の制御モードの例を説明するためのタイムチャートである。
【図6C】第3の制御モードの例を説明するためのタイムチャートである。
【図6D】第4の制御モードの例を説明するためのタイムチャートである。
【図7】第1の制御モードの動作例を表すフローチャートである。
【図8】イナーシャフェーズ発生時間のテーブルの内容例を示す図である。
【図9】制御装置の機能構成例を表すブロック図である。
【図10A】第1の制御モード時のスロットル開度の時間変化例を表す図である。
【図10B】第1の制御モード時のスロットル開度の時間変化例を表す図である。
【図11A】第4の制御モード時のスロットル開度の時間変化を表す図である。
【図11B】第4の制御モード時のスロットル開度の時間変化を表す図である。
【図12】制御装置の機能構成の変形例を表すブロック図である。
【図13】制御装置の動作例を表すフローチャートである。
【図14】パワーオン判定用のマップを表す図である。
【図15】抑制判定用のマップを表す図である。
【図16】抑制判定用のマップを表す図である。
【図17】制御装置の機能構成の変形例を表すフローチャートである。
【図18】第1の制御モード時にブリッピング操作が行われた場合のタイムチャートである。
【図19】第1の制御モード時にブリッピング操作が行われた場合のタイムチャートである。
【発明を実施するための形態】
【0016】
本発明の車両の制御装置、車両及び原動機の実施形態を、図面を参照しながら説明する。
【0017】
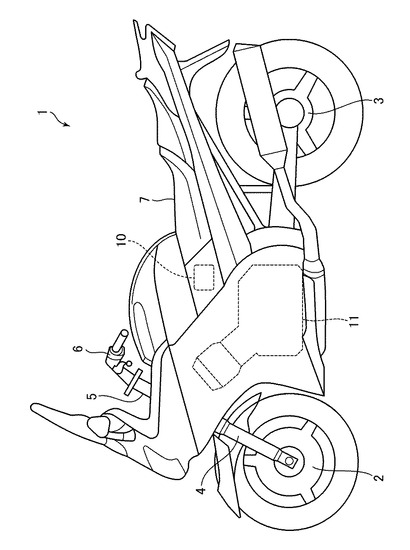
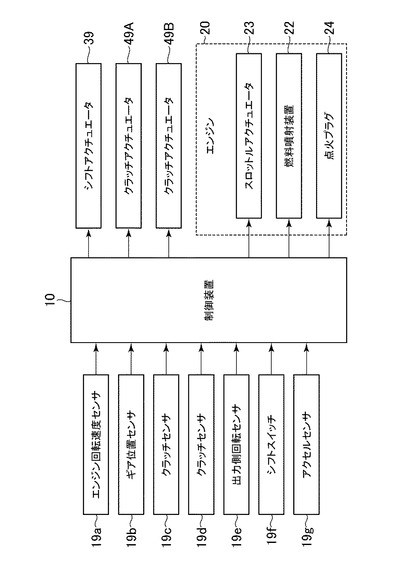
図1は、本発明の一実施形態に係る制御装置10を備えた自動二輪車1の側面図である。図2は、エンジン20から後輪3に至るトルク伝達経路に設けられた機構の概略図である。図3は、本発明の車両の一実施形態である自動二輪車1の構成を示すブロック図である。
【0018】
図1に示すように、自動二輪車1は、本発明の原動機の一実施形態であるエンジンユニット11を備えている。エンジンユニット11の前方に配置される前輪2は、フロントフォーク4の下端で支持されている。フロントフォーク4の上部には車体フレーム(不図示)の最前部で回転可能に支持されたステアリングシャフト5が連結されている。ステアリングシャフト5の上方にはステアリング6が設けられている。ステアリング6とフロントフォーク4と前輪2は、ステアリングシャフト5を中心にして一体的に左右に回転可能となっている。
【0019】
ステアリング6の後方には搭乗者が跨って座ることのできるシート7が配置されている。エンジンユニット11の後方には後輪3が配置されている。変速機30(図2参照)から出力されるトルクはチェーンやベルト、ドライブシャフトなどのトルク伝達部材(不図示)を介して後輪3に伝達される。
【0020】
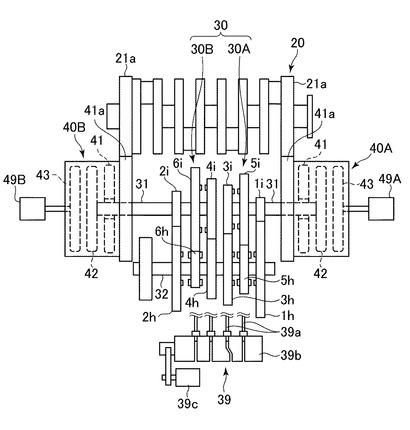
図2に示すように、エンジンユニット11はエンジン20と変速機30とを備えている。自動二輪車1は所謂ツインクラッチ式の車両であり、第1クラッチ40Aと第2クラッチ40Bとがエンジンユニット11に設けられている。エンジン20はその駆動によって回転するクランクシャフト21を備えている。
【0021】
エンジン20のトルク(クランクシャフト21の回転)は、第1クラッチ40Aと第2クラッチ40Bのそれぞれに入力される。第1クラッチ40Aと第2クラッチ40Bは、クランクシャフト21の回転に連動する駆動部材41を有している。図2に示す例では、クランクシャフト21は2つのプライマリギア21aを有している。第1クラッチ40Aの駆動部材41と第2クラッチ40Bの駆動部材41とにはプライマリギア41aが設けられている。プライマリギア41aはプライマリギア21aと噛み合っている。
【0022】
第1クラッチ40Aと第2クラッチ40Bは、後述する変速機構30A,30Bの入力軸31に連動する従動部材42を有している。第1クラッチ40Aと第2クラッチ40Bは例えば単板又は多板の摩擦クラッチである。駆動部材41と従動部材42が互いに軸方向で押し付けられることにより、それらの間でトルクの伝達がなされる。なお、駆動部材41は例えばフリクションディスクであり、従動部材42は例えばクラッチディスクである。
【0023】
変速機30は第1変速機構30Aと第2変速機構30Bとを備えている。第1変速機構30Aと第2変速機構30Bは第1クラッチ40Aと第2クラッチ40Bの下流にそれぞれ配置されている。すなわち、第1変速機構30Aと第2変速機構30Bのそれぞれに入力軸31が設けられている。第1変速機構30Aの入力軸31は第1クラッチ40Aの従動部材42に連結されており、第1変速機構30Aには第1クラッチ40Aを介してトルクが入力される。第2変速機構30Bの入力軸31は第2クラッチ40Bの従動部材42に連結され、第2変速機構30Bには第2クラッチ40Bを介してトルクが入力される。第1変速機構30A,30Bは共通の出力軸32を有している。このように、自動二輪車1はエンジン20のクランクシャフト21から変速機30の出力軸32に至るトルク伝達経路として2つの経路を有している。第1の経路は、第1変速機構30Aと第1クラッチ40Aとによって構成され、第2の経路は第2変速機構30Bと第2クラッチ40Bとによって構成される。変速機30の出力軸32は、チェーンやベルト、シャフトなどで構成されたトルク伝達部材介して後輪3の車軸に連結されている。
【0024】
第1変速機構30Aと第2変速機構30Bは複数のギア1i〜6i及び1h〜6hを含んでいる。ギア1i〜6iは入力軸31に設けられ、ギア1h〜6hは出力軸32に設けられている。ギア1iとギア1hは互いに噛み合っており、それらの減速比は1速に対応している。同様に、ギア2i乃至6iはギア2h乃至6hとそれぞれ噛み合っており、それらの減速比は2速乃至6速にそれぞれ対応している。この例では、第1変速機構30Aは奇数変速段に対応するギア1i,3i,5i,1h,3h,5hによって構成され、第2変速機構30Bは偶数変速段に対応するギア2i、4i,6i,2h,4h,6hによって構成されている。
【0025】
変速機構30A,30Bは所謂選択摺動式の変速機構である。各変速段に対応したギア対(例えば、ギア1iとギア1h)のうちいずれか一方は、当該一方のギアが設けられた軸に対して相対回転自在となっている。これに対して、他方のギアは当該他方のギアが設けられた軸とスプラインで噛み合っており、当該軸と一体的に回転する。この例では、ギア1h,5i,3h,4h,6i,2hが、それらのギアが設けられた軸に対して相対回転自在となっている。一方、ギア1i,5h,3i,4i,6h,2iは、それらが設けられた軸と噛み合っており、当該軸と一体的に回転する。そのため、中立状態(いずれの変速段にも設定されていない状態)においては、ギア対(5i,5h)及び(6i,6h)は出力軸32に連動し、ギア対(1i,1h)、(3i,3h)、(4i,4h)及び(2i,2h)は入力軸31に連動する。
【0026】
入力軸31に連動するギアと出力軸32に連動するギアは、軸方向で互いに隣り合うように配置され、且つ、軸方向に相対移動可能(接近方向及び離れる方向への移動が可能)となっている。また、複数のギア1i〜6i,1h〜6hは、ドッグクラッチ(dog clutch)が形成されたギアを含んでいる。入力軸31に連動するギアと出力軸32に連動するギアは、ドッグクラッチによって係合可能となっている。これらの2つのギアの係合によって、第1変速機構30Aの入力軸31又は第2変速機構30Bの入力軸31の回転(トルク)は、出力軸32に伝達される。なお、図2の例では、ギア5h,3i,4i,6hが軸方向に移動可能となっている。
【0027】
図2に示すように、変速機30には軸方向に移動可能なギア5h,3i,4i,6h(以下、可動ギア)を軸方向に移動させるシフトアクチュエータ39が設けられている。シフトアクチュエータ39は、可動ギアに引っ掛かる複数のシフトフォーク39aや、回転することによってシフトフォーク39aを軸方向に動かすシフトカム39b、シフトカム39bを回転させる動力を発生する電動モータ39c等を含んでいる。シフトアクチュエータ39は制御装置10による制御の下で可動ギアを動かし、変速段を切り換える。
【0028】
クラッチ40A,40Bには、これらを制御装置10による制御の下で動かす(すなわちクラッチ40A,40Bを係合状態にしたり、解放状態にする)クラッチアクチュエータ49A,49Bが設けられている。クラッチアクチュエータ49A,49Bは例えば電動モータを含んでいる。電動モータの動力は、油圧やロッドを介してプレッシャープレート43に伝えられ、駆動部材41と従動部材42とを軸方向で互いに押し付ける。
【0029】
図3に示すように、エンジン20には、燃料噴射装置22とスロットルアクチュエータ23と点火プラグ24とが設けられている。燃料噴射装置22はエンジン20の燃焼室で燃焼させる燃料をエンジン20に供給する。スロットルアクチュエータ23はエンジン20の吸気路を流れる空気量を調整するスロットルバルブ(不図示)の開度を制御する。点火プラグ24はエンジン20の燃焼室に流れ込んだ空気と燃料の混合気に点火する。燃料噴射装置22の燃料噴射量、点火プラグ24の点火タイミング、及び、スロットルバルブの開度(以下、スロットル開度)は制御装置10によって制御される。
【0030】
自動二輪車1は、エンジン回転速度センサ19aと、ギア位置センサ19bと、クラッチセンサ19c,19dと、出力側回転センサ19eと、シフトスイッチ19fと、アクセルセンサ19gと、を含んでいる。これらのセンサは制御装置10に接続されている。
【0031】
エンジン回転速度センサ19aはエンジン回転速度に応じた周波数のパルス信号を出力する回転センサによって構成される。制御装置10はエンジン回転速度センサ19aの出力信号に基づいてエンジン回転速度(クランクシャフト21の回転速度)を算出する。
【0032】
ギア位置センサ19bは例えばシフトカム39bの回転角に応じた電圧信号を出力するポテンショメータによって構成される。制御装置10はギア位置センサ19bの出力信号に基づいて、可動ギア5h,3i,4i,6hの位置や現在の変速段などを検知する。
【0033】
出力側回転センサ19eは後輪3の車軸や、出力軸32に設けられる。出力側回転センサ19eは、例えば後輪3の回転速度や、出力軸32の回転速度に応じた周波数のパルス信号を出力する回転センサである。制御装置10は出力側回転センサ19eの出力信号に基づいて車速や出力軸32の回転速度を算出する。
【0034】
シフトスイッチ19fは搭乗者によって操作されるスイッチであり、搭乗者の変速指令(変速段を上げるシフトアップ指令を示す信号、変速段を下げるシフトダウン指令を示す信号)を制御装置10に対して入力する。なお、シフトスイッチ19fはシフトアップ用のスイッチとシフトダウン用のスイッチとが設けられる。
【0035】
アクセルセンサ19gはステアリング6に設けられたアクセルグリップ(不図示)の操作量(回転角)に応じた信号を出力する。アクセルセンサ19gは例えばポテンショメータによって構成される。制御装置10はアクセルセンサ19gの出力信号に基づいてアクセルグリップの操作量(アクセル操作量)を検知する。
【0036】
クラッチセンサ19cは、第1クラッチ40Aの伝達トルク容量(現在の第1クラッチ40Aの状態(現在の係合度合い)で伝達可能な最大トルク)を検出するためのセンサである。また、クラッチセンサ19dは、第2クラッチ40Bの伝達トルク容量(現在の第2クラッチ40Bの状態(現在の係合度合い)で伝達可能な最大トルク)を検出するためのセンサである。クラッチ40A,40Bが係合状態にある時に伝達トルク容量は最大となり、クラッチ40A,40Bが解放状態にある時に伝達トルク容量は最小(例えば0Nm)となる。クラッチセンサ19c,19dは、例えば、プレッシャープレート43の変位量を検出する。
【0037】
伝達トルク容量はクラッチ40A,40Bの位置(クラッチのストローク量)に対応している。クラッチセンサ19c,19dは、例えば、クラッチ40A,40Bの位置に応じた信号(クラッチアクチュエータ49A,49Bの動作量に応じた信号)を出力するポテンショメータである。制御装置10は、クラッチセンサ19c,19dの出力信号に基づいて検知されるクラッチ位置から伝達トルク容量を検知する。例えば、制御装置10は、クラッチ位置と伝達トルク容量とを対応付けるマップや演算式を用いて、検知したクラッチ位置から伝達トルク容量を算出する。
【0038】
クラッチアクチュエータ49A,49Bが油圧によってクラッチ40A,40Bを動かす構造においては、伝達トルク容量はクラッチ40A,40Bに作用する油圧(以下、クラッチ圧)に対応している。そういった構造においては、クラッチセンサ19c,19dはクラッチ圧に応じた信号を出力する油圧センサでもよい。この場合、制御装置10は、クラッチセンサ19c,19dの出力信号に基づいて検知されるクラッチ圧から伝達トルク容量を検知する。例えば、制御装置10は、クラッチ圧と伝達トルク容量とを対応付けるマップや演算式を用いて、検知したクラッチ圧から伝達トルク容量を算出する。
【0039】
また、伝達トルク容量はクラッチアクチュエータ49A,49Bからクラッチ40A,40Bに作用する力(駆動部材41と従動部材42の間に作用する押し付け力)に対応している。クラッチアクチュエータ49A,49Bからクラッチ40A,40Bに作用する力によって、その力を受けている部分(例えば、クラッチ40A,40Bのケースなど)が歪む。そこで、クラッチセンサ19c,19dは、当該クラッチ40A,40Bから力を受ける部分の歪みの大きさに応じた信号を出力する歪みセンサでもよい。その場合、制御装置10は、クラッチセンサ19c,19dの出力信号に基づいて検知する歪みから伝達トルク容量を検知する検知する。例えば、制御装置10は、クラッチの歪みと伝達トルク容量とを対応付けるマップや演算式を用いて、検知した歪みから伝達トルク容量を算出する。
【0040】
制御装置10はCPU(Central Processing Unit)と、ROM(Read Only Memory)やRAM(Random Access Memory)などのメモリとを備えている。制御装置10はメモリに格納されたプログラムをCPUにおいて実行し、エンジン20、変速機30、及びクラッチ40A,40Bを制御する。
【0041】
具体的には、制御装置10は、エンジン20の出力トルクについての目標値(以下において目標エンジントルクとする)を設定し、実際の出力トルクが目標エンジントルクになるようにスロットルアクチュエータ23や燃料噴射装置22、点火プラグ24を駆動する。また、制御装置10は、第1クラッチ40Aの伝達トルク容量と第2クラッチ40Bの伝達トルク容量とについて目標値(以下において目標トルク容量とする)を設定し、実際の伝達トルク容量が目標トルク容量になるように、クラッチアクチュエータ49A,49Bを動かす。さらに、制御装置10は、第1変速機構30A及び第2変速機構30Bで設定される変速段が変速指令に応じたものとなるように、シフトアクチュエータ39を動かす。
【0042】
変速制御の概要について説明する。なお、以下の説明において、第1クラッチ40Aと第2クラッチ40Bのうち、変速の前にエンジン20のトルクを伝達しているクラッチを前クラッチとし、他方のクラッチ(すなわち、エンジン20のトルクの伝達を変速指令によって開始するクラッチ)を次クラッチとする。同様に、第1変速機構30Aと第2変速機構30Bのうち、変速の前にエンジン20のトルクを伝達している変速機構を前変速機構とし、他方の変速機構(すなわちエンジン20のトルクの伝達を変速指令によって開始する変速機構)を次変速機構とする。
【0043】
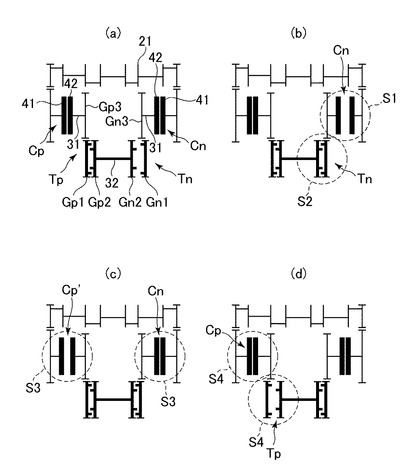
図4は変速制御の概要を説明するための図である。同図においは、図2に示す変速機構30A,30B、クラッチ40A,40Bがさらに簡略化して示されている。同図においてクラッチCpが前クラッチであり、クラッチCnが次クラッチである。また、変速機構Tpが前変速機構であり、変速機構Tnが次変速機構である。また、前変速機構TpのギアGp1は、前の変速段でトルクを伝達している可動ギア(5h、3i、4i、又は6h)を示し、ギアGp2は前の変速段でトルクを伝達している固定ギア(1h、5i、3h、4h、6i、又は2h)を示している。さらに、次変速機構TnのギアGn1は、次の変速段でトルクを伝達する可動ギアを示し、ギアGn2は次の変速段でトルクを伝達する固定ギアを示している。この図では、簡略化のために、1つの可動ギアGp1,Gn1と1つの固定ギアGp2,Gn2が示されている。この図においては、固定ギアGp2,Gn2が出力軸32に固定されており(すなわち出力軸32とスプラインで噛み合っており)、出力軸32と一体的に回転する。可動ギアGp1,Gn1は、出力軸32に対して自由に相対回転できる。また、可動ギアGp1,Gn1は、入力軸31に固定されたギアGp3,Gn3とそれぞれ噛み合っており、ギアGp3,Gn3や入力軸31の回転に連動する。
【0044】
図4(a)に示すように、通常走行においては、2つのクラッチCp,Cnは係合状態(伝達トルク容量が最大の状態)に設定されている。前変速機構Tpにおいては、前の変速段に対応する可動ギアGp1と固定ギアGp2とがドッグクラッチによって係合している。また、次変速機構Tnにおいては全ての可動ギアが中立位置(いずれの固定ギアとも係合しない位置)に配置される。そのため、エンジン20のトルクは、2つのトルク伝達経路のうち一方の経路(前クラッチCp及び前変速機構Tp)を介して、後輪3に向けて伝達されている。他方の経路においては次変速機構Tnにおいてトルク伝達が遮断されている。
【0045】
変速指令が生じたとき、制御装置10はトルクを伝達する経路を一方から他方に切り換える。すなわち、制御装置10は次変速機構Tnの可動ギアGn1と固定ギアGn2とを係合させ、前変速機構Tpの可動ギアGp1を中立位置にする。具体的には、変速機構Tp,TnとクラッチCp,Cnは、変速制御において次のように動かされる。まず、制御装置10は、図4(b)のS1に示されるように次クラッチCnの係合を解除し、S2に示されるように次変速機構Tnの可動ギアGn1を動かし、隣の固定ギアGn2に係合させる(所謂ドグ係合フェーズ)。その後、制御装置10は、図4(c)のS3に示されるように次クラッチCnを解放状態から係合状態に戻し、それと共に前クラッチCpを解放状態にする(所謂トルクフェーズ)。最後に、制御装置10は、図4(d)のS4に示されるように前変速機構Tpの可動ギアGp1を中立位置まで移動させた後に、前クラッチCpを係合状態にする(所謂ドグ解放フェーズ)。
【0046】
なお、こうした変速制御を実行する際、変速中の後輪3の駆動力の増減(変速ショック)を抑えるために、前クラッチCp又は次クラッチCnの駆動部材41の回転速度と従動部材42の回転速度とを一致させるための回転制御(所謂イナーシャフェーズ)が、トルクフェーズ(図4(c)のS3を参照)の前または後に必要となる場合がある。以下に説明する制御装置10の変速制御の複数の制御モードは、トルクフェーズがイナーシャフェーズの前に行われるものと、イナーシャフェーズがトルクフェーズの前に行われるものと、に大きく分けられる。
【0047】
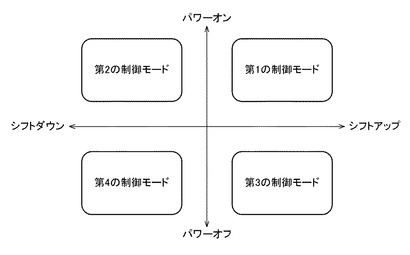
図5は、制御装置10の変速制御の複数の制御モードを示す図である。制御装置10は変速制御として4つの制御モードを備えている。第1の制御モードは、アクセルを開いた状態でのシフトアップ制御(パワーオンシフトアップ制御)である。第2の制御モードは、アクセルを開いた状態でのシフトダウン制御(パワーオンシフトダウン制御)である。第3の制御モードは、アクセルを閉じた状態でのシフトアップ制御(パワーオフシフトアップ制御)である。第4の制御モードは、アクセルを閉じた状態でのシフトダウン制御(パワーオフシフトダウン制御)である。
【0048】
以下、各々の制御モードについて説明する。図6A〜図6Dは、各々の制御モードの例を説明するためのタイムチャートである。
【0049】
[第1の制御モード]
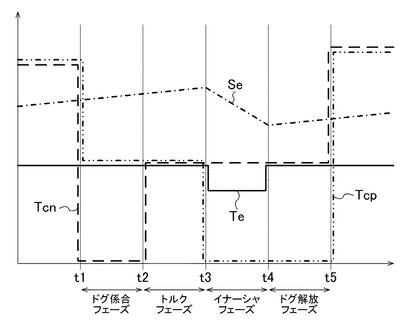
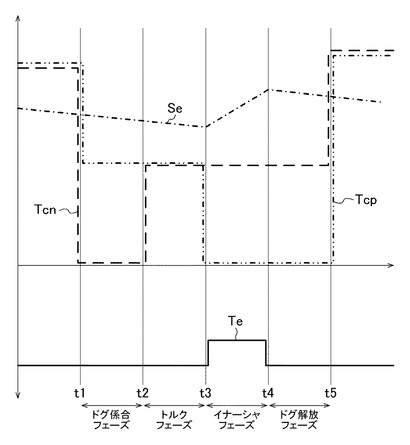
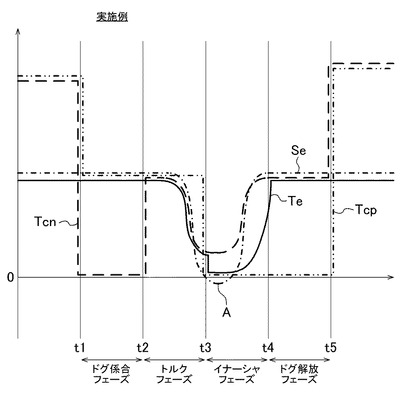
図6Aは、制御装置10が実行する第1の制御モード(パワーオンシフトアップ制御)の例を説明するためのタイムチャートである。同図において、一点鎖線はエンジン回転速度Seを表し、実線は目標エンジントルクTeを表し、破線は次クラッチCnの目標トルク容量Tcnを表し、二点鎖線は前クラッチCpの目標トルク容量Tcpを表している。このうち、破線及び二点鎖線は、目標トルク容量を一次減速比で除した値となっている。なお、同図では、各々の線を互いに重ならないよう縦又は横方向に僅かにずらしている。この第1の制御モードでは、トルクフェーズとイナーシャフェーズとがこの順に実行される。
【0050】
まず、制御装置10は、ドグ係合フェーズを開始する(t1)。具体的には、制御装置10は、次クラッチCnを係合状態から解放状態に変化させる。係合状態とは伝達トルク容量が最大となる状態であり、解放状態とは伝達トルク容量が最小(例えば0Nm)となる状態である。また、制御装置10は、シフトアクチュエータ39を駆動して、次変速機構Tnの可動ギアGn1を固定ギアGn2に向けて移動させる。また、制御装置10は、前クラッチCpを係合状態から半係合状態に変化させる。ここでは、前クラッチCpの目標トルク容量Tcpが目標エンジントルクTeに対応する値まで下げられる。
【0051】
次に、制御装置10は、トルクフェーズを開始して、エンジン20のトルクを伝達する経路を切り換える(t2)。制御装置10は、前クラッチCpを半係合状態から解放状態に変化させ、次クラッチCnを解放状態から半係合状態に変化させる。具体的には、制御装置10は、次クラッチCnの目標トルク容量Tcpを目標エンジントルクTeに対応する値まで上げる。
【0052】
次に、制御装置10は、イナーシャフェーズを開始して、エンジン回転速度Seを低下させる(t3)。具体的には、制御装置10は、目標エンジントルクTeを次クラッチCnの目標トルク容量Tcnより相対的に下げることで、エンジン回転速度Seを低下させる。換言すると、制御装置10は、次クラッチCnの目標トルク容量Tcnを目標エンジントルクTeより相対的に上げることで、エンジン回転速度Seを低下させる。
【0053】
次に、制御装置10は、ドグ解放フェーズを開始する(t4)。具体的には、制御装置10は、シフトアクチュエータ39を駆動して、前変速機構Tpの可動ギアGp1を中立位置に向けて移動させる。その後、制御装置10は、前クラッチCpと次クラッチCnを係合状態に戻す(t5)。これにより、第1の制御モードに係る変速制御が終了する。
【0054】
[第2の制御モード]
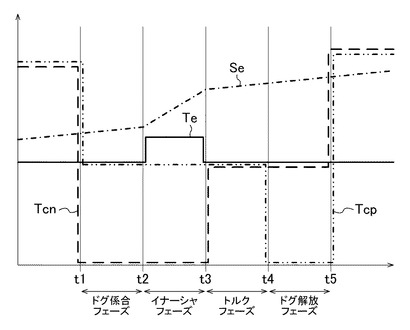
図6Bは、制御装置10が実行する第2の制御モード(パワーオンシフトダウン制御)の例を説明するためのタイムチャートである。以下、上記制御モードと異なる点を主に説明する。この第2の制御モードでは、イナーシャフェーズとトルクフェーズとがこの順に実行される。
【0055】
制御装置10は、ドグ係合フェーズの次に、イナーシャフェーズを開始して、エンジン回転速度Seを増加させる(t2)。具体的には、制御装置10は、エンジントルクTeを前クラッチCpの目標トルク容量Tcpより相対的に上げることで、エンジン回転速度Seを増加させる。換言すると、制御装置10は、前クラッチCpの目標トルク容量Tcpを目標エンジントルクTeより相対的に上げることで、エンジン回転速度Seを増加させる。その後、制御装置10は、トルクフェーズとドグ解放フェーズとを実行する。これにより、第2の制御モードに係る変速制御が終了する。
【0056】
[第3の制御モード]
図6Cは、制御装置10が実行する第3の制御モード(パワーオフシフトアップ制御)の例を説明するためのタイムチャートである。以下、上記制御モードと異なる点を主に説明する。この第3の制御モードでは、イナーシャフェーズとトルクフェーズとがこの順に実行される。この第3の制御モードでは、目標エンジントルクTeが負の値になる。
【0057】
制御装置10は、ドグ係合フェーズの次に、イナーシャフェーズを開始して、エンジン回転速度Seを低下させる(t2)。具体的には、制御装置10は、目標エンジントルクTeの絶対値を前クラッチCpの目標トルク容量Tcpより相対的に上げることで(すなわち、目標エンジントルクTeを下げることで)、エンジン回転速度Seを低下させる。換言すると、制御装置10は、前クラッチCpの目標トルク容量Tcpを目標エンジントルクTeの絶対値より相対的に下げることで、エンジン回転速度Seを低下させる。その後、制御装置10は、トルクフェーズとドグ解放フェーズとを実行する。これにより、第3の制御モードに係る変速制御が終了する。
【0058】
[第4の制御モード]
図6Dは、制御装置10が実行する第4の制御モード(パワーオフシフトダウン制御)の例を説明するためのタイムチャートである。以下、上記制御モードと異なる点を主に説明する。この第4の制御モードでは、トルクフェーズとイナーシャフェーズとがこの順に実行される。この第4の制御モードでは、目標エンジントルクTeが負の値になる。
【0059】
次に、制御装置10は、トルクフェーズの次に、イナーシャフェーズを開始して、エンジン回転速度Seを増加させる(t3)。具体的には、制御装置10は、目標エンジントルクTeの絶対値を次クラッチCnの目標トルク容量Tcnより相対的に下げることで(すなわち、目標エンジントルクTeを上げることで)、エンジン回転速度Seを増加させる。換言すると、制御装置10は、次クラッチCnの目標トルク容量Tcnを目標エンジントルクTeの絶対値より相対的に上げることで、エンジン回転速度Seを増加させる。その後、制御装置10は、ドグ解放フェーズを実行する。これにより、第4の制御モードに係る変速制御が終了する。
【0060】
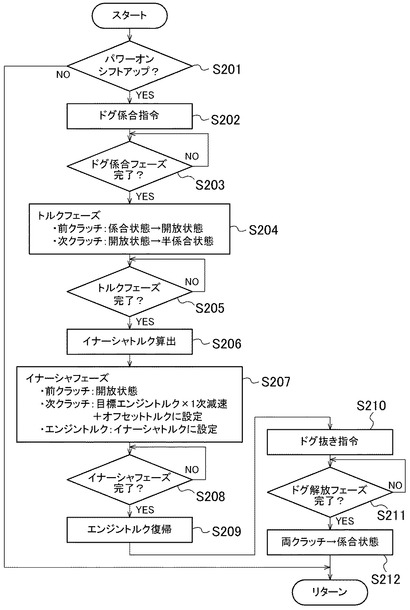
以下、上記第1〜第4の制御モード(図6A〜図6D)の中から代表して、第1の制御モード(パワーオンシフトアップ制御)の具体的な動作例を説明する。図7は、第1の制御モードの動作例を表すフローチャートである。
【0061】
S201において、制御装置10は、変速制御が第1の制御モード(パワーオンシフトアップ制御)であるか否かを判定する。第1の制御モードではない場合(S201:NO)、制御装置10は処理を終了する。
【0062】
S202において、制御装置10は、ドグ係合指令を出力して、ドグ係合フェーズを実行する(上記図6のt1)。ドグ係合指令は、次クラッチCnを係合状態から解放状態に変化させる指令と、次変速機構Tnの可動ギアGn1を固定ギアGn2に向けて移動させる指令と、を含んでいる。また、ドグ係合指令は、前クラッチCpを係合状態から半係合状態に変化させる指令を含んでいる。具体的には、前クラッチCpの目標トルク容量は、これを一次減速比で除した値が目標エンジントルクと同じになるように設定される。
【0063】
S203において、制御装置10は、ドグ係合フェーズが完了したか否かを判定する。判定方法としては、次の方法が考えられる。例えば、ギア位置センサ19bからの信号に基づき、シフトカム39bの位置がドグ係合に対応する範囲内にあるときに、ドグ係合フェーズの完了が判定される。また、入力軸32の回転速度を検出するセンサが設けられる場合には、エンジン回転速度を一次減速比で除した値と入力軸回転速度との差がドグ係合に対応する範囲内にあるときに、ドグ係合フェーズの完了が判定されてもよい。
【0064】
S204において、制御装置10は、トルクフェーズを実行する(上記図6のt2)。トルクフェーズの開始時には、制御装置10は、前クラッチCpを解放状態に変化させる指令と、次クラッチCnを半係合状態に変化させる指令と、が出力される。具体的には、次クラッチCnの目標トルク容量は、これを一次減速比で除した値が目標エンジントルクと同じになるように設定される。
【0065】
S205において、制御装置10は、トルクフェーズが完了したか否かを判定する。具体的にはクラッチセンサ19c,19dからの信号に基づいて、クラッチ40A,40Bの伝達トルク容量が目標トルク容量に到達したか否かが判定される。
【0066】
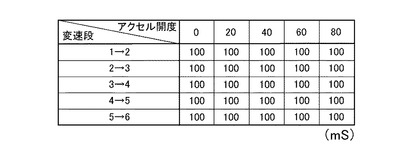
S206において、制御装置10は、イナーシャトルクを算出する。イナーシャトルクは、イナーシャフェーズにおいて適用される目標エンジントルクである(上記図6のTe)。イナーシャトルクは、例えば、(現在エンジン回転速度−変速後到達エンジン回転速度)/イナーシャフェーズ発生時間×クランク周りイナーシャの式により求められる。イナーシャフェーズ発生時間は、例えば、図8に示されるようなイナーシャフェーズ発生時間が変速段とアクセル開度とに対応付けられたテーブルから読み出される。また、クランク周りイナーシャは、クランクシャフト21の軸回りに存在する重量物によるイナーシャであり、エンジン20の設計段階などにおいて予め求めることができる。
【0067】
S207において、制御装置10は、イナーシャフェーズを実行し、エンジン回転速度Seを低下させる(上記図6のt3)。イナーシャフェーズが開始されると、目標エンジントルクは上記S206で算出されたイナーシャトルクに設定される。また、前クラッチCpの目標伝達トルクは最小値(例えば0Nm)に設定される。また、次クラッチCnの目標伝達トルクは、アクセル開度から決まる目標エンジントルクに1次減速比を乗じ、さらにオフセットトルクを加算した値に設定される。ここで、オフセットトルクは、次クラッチCnの目標伝達トルクTcnが実際の伝達トルク容量と異なるためにイナーシャフェーズが進行しないような状況を解消するための値で、例えばS207が開始されてからの経過時間に応じて定まる値とされる。
【0068】
S208において、制御装置10は、イナーシャフェーズが完了したか否かを判定する。例えば、|ドライブ軸回転速度×変速後ギア比×1次減速比−エンジン回転速度|< 閾値 の式が成立したときに、イナーシャフェーズの完了が判定される。また、例えば、(ドライブ軸回転速度×変速前ギア比×1次減速比−エンジン回転速度)/(ドライブ軸回転速度×(変速前ギア比−変速後ギア比)×1次減速比)> 閾値 の式が成立したときに、イナーシャフェーズの完了が判定されてもよい。また、例えば、上記2つの式の一方または両方が成立したときに、イナーシャフェーズの完了が判定されてもよい。
【0069】
S209において、制御装置10は、目標エンジントルクを、アクセル開度から求まる通常の値に戻す。
【0070】
S210において、制御装置10は、ドグ解放指令を出力して、ドグ解放フェーズを実行する(上記図6のt4)。ドグ解放指令は、前変速機構Tpの可動ギアGn1を中立位置に移動させる指令を含んでいる。
【0071】
S211において、制御装置10は、ドグ解放フェーズが完了したか否かを判定する。判定方法としては、次の方法が考えられる。例えば、ギア位置センサ19bからの信号に基づき、シフトカム39bの位置がドグ解放に対応する範囲内にあるときに、ドグ解放フェーズの完了が判定される。また、入力軸32の回転速度を検出するセンサが設けられる場合には、エンジン回転速度を一次減速比で除した値と入力軸回転速度との差がドグ解放に対応する範囲内にあるときに、ドグ解放フェーズの完了が判定されてもよい。
【0072】
S212において、制御装置10は、前クラッチCp及び次クラッチCnを係合状態に変化させる指令を出力する。以上により、第1の制御モード(パワーオンシフトアップ制御)に係る変速制御が終了する。
【0073】
ところで、マニュアル変速に慣れた運転者は、ツインクラッチ式の自動二輪車1では不要であるにも関わらず、アップシフト変速時に一時的にアクセルを閉じたり、ダウンシフト変速時に一時的にアクセルを開けるブリッピング操作を無意識のうちに行うことがある。例えば、上記第1の制御モード(パワーオンシフトアップ制御)時にアクセルを閉じるブリッピング操作が行われると、エンジン20の出力トルクが下降し、駆動状態から被駆動状態に逆転してショックが生じるおそれがある。また、上記第4の制御モード(パワーオフシフトダウン制御)時にアクセルを開けるブリッピング操作が行われると、エンジン20の出力トルクが上昇し、被駆動状態から駆動状態に逆転してショックが生じるおそれがある。ここで、駆動状態とは、エンジン20からトルク伝達経路に出力される出力トルクが、トルク伝達経路からエンジン20に入力される負荷トルクよりも小さい状態をいい、被駆動状態とはその逆の状態をいう。
【0074】
そこで、本実施形態では、変速期間中にブリッピング操作が行われたときにショックの発生を抑制するべく、以下に説明する制御を実行する。
【0075】
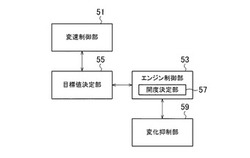
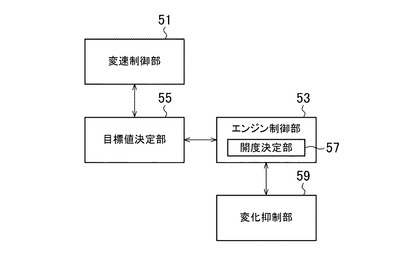
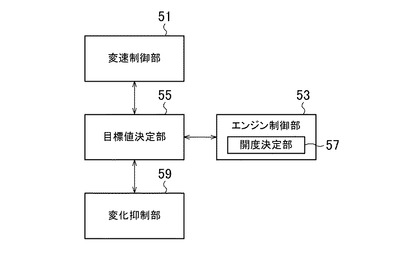
図9は、制御装置10の機能構成例を表すブロック図である。制御装置10は、変速制御部51と、エンジン制御部53と、目標値決定部55と、変化抑制部59と、を備えている。また、エンジン制御部53は、開度決定部57を含んでいる。制御装置10に含まれる各部は、制御装置10のCPUがメモリに格納されたプログラムを実行することで実現される。
【0076】
変速制御部51は、シフトスイッチ19fから変速指令が入力されると、変速制御を実行し、クラッチアクチュエータ49A,49B及びシフトアクチュエータ39を駆動する(上記図5〜図7を参照)。また、変速制御部51は、目標値決定部55から供給される目標エンジントルクに基づいて、クラッチ40A,40Bの目標トルク容量や、イナーシャフェーズで用いるイナーシャトルクを算出する。
【0077】
エンジン制御部53は、目標値決定部55から供給される目標エンジントルクに、エンジン20の実際の出力トルクが近づくように、エンジン20に設けられた燃料噴射装置22、スロットルアクチュエータ23及び点火プラグ24を駆動する。例えば、エンジン20の出力トルクを上昇させる場合には、スロットルアクチュエータ23により調整されるスロットル開度を増加させる。また、エンジン20の出力トルクを下降させる場合には、スロットルアクチュエータ23により調整されるスロットル開度を減少させる。また、燃料噴射装置22により噴射される燃料の量を減少させたり、点火プラグ24による点火タイミングを遅らせてもよい。
【0078】
具体的には、エンジン制御部53に含まれる開度決定部57が、目標値決定部55から供給される目標エンジントルクに応じて目標スロットル開度を決定し、エンジン20に設けられたスロットルアクチュエータ23を駆動する。例えば、目標スロットル開度と目標エンジントルクとは線形の関係にある。また、開度決定部57は、変化抑制部59からの抑制指令に応じてスロットル開度の時間変化率を抑制する。
【0079】
目標値決定部55は、アクセルセンサ19gから入力されるアクセル操作量に基づいて目標エンジントルクを決定し、変速制御部51及びエンジン制御部53に供給する。例えば、目標値決定部55は、メモリに格納されたアクセル操作量と目標エンジントルクとの関係を表すマップを参照することで、目標エンジントルクを決定する。また、目標値決定部55は、イナーシャフェーズにおいて、変速制御部51から供給されるイナーシャトルクを目標エンジントルクとして設定する。
【0080】
変化抑制部59は、変速期間中において、スロットル開度が駆動状態と被駆動状態との境界値に向かって変化する場合に、エンジン制御部53に抑制指令を出力して、スロットル開度の時間変化率を抑制させる。例えば、変化抑制部59は、変速期間中にスロットル開度が境界値に所定値よりも近付いた場合に抑制指令を出力してもよいし、変速期間中にスロットル開度が境界値に向かって変化すると常にエンジン制御部53に抑制指令を出力してもよい。なお、本例では、スロットル開度の変化に基づいて抑制指令を出力しているが、これに限られず、アクセル開度の変化に基づいて抑制指令を出力してもよい。
【0081】
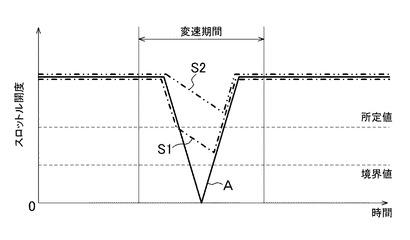
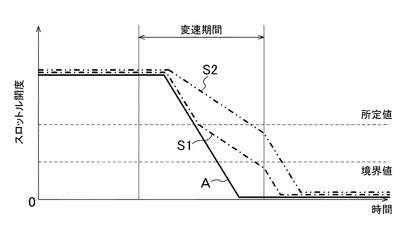
図10A及び図10Bは、第1の制御モード(パワーオンシフトアップ制御)時のスロットル開度の時間変化例を表す図である。これらの図において、実線はアクセル開度Aを表し、一点鎖線は第1例に係るスロットル開度S1を表し、二点鎖線は第2例に係るスロットル開度S2を表す。また、これらの図において、境界値よりもスロットル開度が大きい側は駆動状態を表し、境界値よりもスロットル開度が小さい側は被駆動状態を表す。図10Aは、変速期間中に運転者が一時的にアクセルを閉じるブリッピング操作を行った場合を表し、図10Bは、変速期間中に運転手が減速を意図してアクセルを閉じた場合を表す。
【0082】
スロットル開度S1,S2は、基本的にアクセル開度Aに追従するが、変速期間中にアクセル開度Aがパワーオン状態(駆動状態)から閉じられた場合に、アクセル開度Aに対する追従が遅れる。すなわち、スロットル開度S1,S2は、変速期間中に駆動状態から下降するときに、下降の時間変化率が抑制される。なお、本実施形態では、スロットル開度S1,S2は、変速期間中に駆動状態から更に上昇するときには、上昇の時間変化率は抑制されないが、これに限られず、上昇の時間変化率を抑制してもよい。
【0083】
図10Aに示されるように、変速期間中におけるスロットル開度S1は、境界値に対して駆動状態側に設定された所定値よりも大きい場合には、変速期間外と同様にアクセル開度Aに追従するが、所定値よりも小さい場合には、下降の時間変化率が低減される。換言すると、変速期間中におけるスロットル開度S1は、境界値に所定距離よりも近付いた場合に、下降の時間変化率が低減される。これに限られず、スロットル開度S2のように、変速期間中に駆動状態にあるときは常に下降の時間変化率が低減されてもよい。
【0084】
このように、変速期間中にパワーオン状態(駆動状態)からアクセルを一時的に閉じるブリッピング操作が行われても、スロットル開度S1,S2の下降の時間変化率が抑制されるので、スロットル開度S1,S2が境界値を跨いでショックが生じることが抑制される。
【0085】
なお、上記第2の制御モード(パワーオンシフトダウン制御)の場合には、パワーオン状態(駆動状態)からアクセルを一時的にさらに開けるブリッピング操作が行われると考えられる。しかし、このときのスロットル開度の変化は、境界値から離れる変化であるので、スロットル開度が境界値を跨いでショックが生じることはない。
【0086】
また、図10Bに示されるように、変速期間中に運転手が減速を意図してアクセルを閉じた場合には、アクセル開度Aが下降するのに伴って、スロットル開度S1,S2も下降する。このとき、スロットル開度S1,S2では、下降の時間変化率が抑制されるため、アクセル開度Aに対する追従が遅れる。ここで、第1例に係るスロットル開度S1では下降の時間変化率が抑制されるのが、所定値と境界値との間の範囲だけであるので、第1例に係るスロットル開度S1がアクセル開度Aに対応する値に到達するまでの時間は、第2例に係るスロットル開度S2よりも短い。
【0087】
このように、変速期間中にブリッピング操作ではないアクセル操作が行われた場合に、スロットル開度S1をアクセル開度Aに追従させるという点に鑑みると、第1例のように所定値と境界値との間の範囲だけで下降の時間変化率を抑制する方が、第2例よりも好ましい。
【0088】
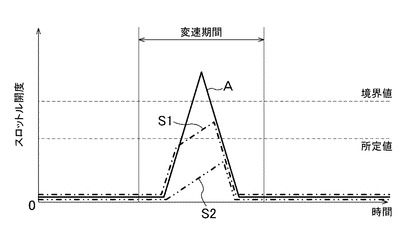
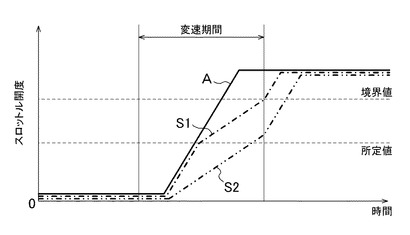
図11A及び図11Bは、第4の制御モード(パワーオフシフトダウン制御)時のスロットル開度の時間変化例を表す図である。これらの図において、実線はアクセル開度Aを表し、一点鎖線は第1例に係るスロットル開度S1を表し、二点鎖線は第2例に係るスロットル開度S2を表す。また、これらの図において、境界値よりもスロットル開度が大きい側は駆動状態を表し、境界値よりもスロットル開度が小さい側は被駆動状態を表す。図11Aは、変速期間中に運転者が一時的にアクセルを開けるブリッピング操作を行った場合を表し、図11Bは、変速期間中に運転手が加速を意図してアクセルを開いた場合を表す。
【0089】
スロットル開度S1,S2は、基本的にアクセル開度Aに追従するが、変速期間中にアクセル開度Aがパワーオフ状態(被駆動状態)から開けられた場合に、アクセル開度Aに対する追従が遅れる。すなわち、スロットル開度S1,S2は、変速期間中に被駆動状態から上昇するときに、上昇の時間変化率が抑制される。なお、本実施形態では、スロットル開度S1,S2は、変速期間中に被駆動状態から更に下降するときには、下降の時間変化率は抑制されないが、これに限られず、下降の時間変化率を抑制してもよい。
【0090】
図11Aに示されるように、変速期間中におけるスロットル開度S1は、境界値に対して被駆動状態側に設定された所定値よりも小さい場合には、変速期間外と同様にアクセル開度Aに追従するが、所定値よりも大きい場合には、上昇の時間変化率が低減される。換言すると、変速期間中におけるスロットル開度S1は、境界値に所定距離よりも近付いた場合に、上昇の時間変化率が低減される。これに限られず、スロットル開度S2のように、変速期間中に被駆動状態にあるときは常に上昇の時間変化率が低減されてもよい。
【0091】
このように、変速期間中にパワーオフ状態(被駆動状態)からアクセルを一時的に開けるブリッピング操作が行われても、スロットル開度S1,S2の上昇の時間変化率が抑制されるので、スロットル開度S1,S2が境界値を跨いでショックが生じることが抑制される。
【0092】
なお、上記第3の制御モード(パワーオフシフトアップ制御)の場合には、パワーオフ状態(被駆動状態)からアクセルを一時的に更に閉じるブリッピング操作が行われるか、若しくはアクセルをそれ以上閉じることができないためにブリッピング操作が行われない、と考えられる。このため、スロットル開度が境界値を跨いでショックが生じることはない。
【0093】
また、図11Bに示されるように、変速期間中に運転手が加速を意図してアクセルを開けた場合には、アクセル開度Aが上昇するのに伴って、スロットル開度S1,S2も上昇する。このとき、スロットル開度S1,S2では、上昇の時間変化率が抑制されるため、アクセル開度Aに対する追従が遅れる。ここで、第1例に係るスロットル開度S1では上昇の時間変化率が抑制されるのが、所定値と境界値との間の範囲だけであるので、第1例に係るスロットル開度S1がアクセル開度Aに対応する値に到達するまでの時間は、第2例に係るスロットル開度S2よりも短い。
【0094】
このように、変速期間中にブリッピング操作ではないアクセル操作が行われた場合に、スロットル開度S1をアクセル開度Aに追従させるという点に鑑みると、第1例のように所定値と境界値との間の範囲だけで上昇の時間変化率を抑制する方が、第2例よりも好ましい。
【0095】
なお、当該態様に限られず、例えば図12に示されるように、変速制御部51は、変速期間中において目標エンジントルクが駆動状態と被駆動状態との境界値に向かって変化する場合に、目標値決定部55に抑制指令を出力して、目標エンジントルクの時間変化率を抑制させてもよい。これによっても、上記態様と同様の効果を得ることが可能である。
【0096】
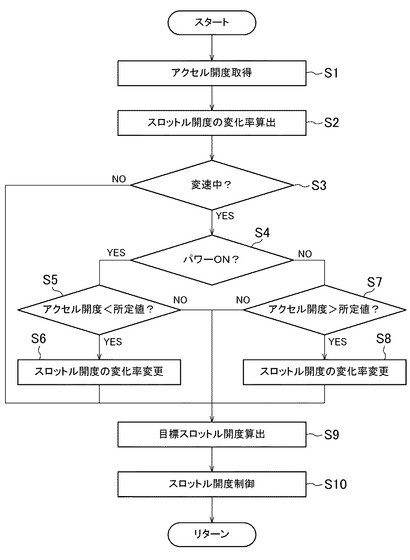
図13は、制御装置10の動作例を表すフローチャートである。当該フローチャートが示す処理は、所定時間毎に実行される。
【0097】
S1において、目標値決定部55は、アクセルセンサ19gからアクセル開度を取得する。S2において、変化抑制部59は、スロットル開度の時間変化率を算出する。S3において、変速制御部51は、変速制御中であるか否かを判定し、変速制御中である場合には(S3:YES)、S4に進み、パワーオン状態であるか否かを判定する。パワーオン状態であるか否かは、例えば、図14に示されるマップに基づいて判定される。エンジン回転速度に応じてマップから求められる基準値よりもスロットル開度が大きい場合にはパワーオン状態であると判定され、基準値よりもスロットル開度が小さい場合にはパワーオン状態でない(すなわち、パワーオフ状態である)と判定される。こうしたマップは、例えば予め行われる実験の結果に基づいて作成することが可能である。
【0098】
パワーオン状態である場合には(S4:YES)、変化抑制部59は、S5に進み、アクセル開度が所定値を下回っているか否かを判定する。すなわち、変化抑制部59は、上記図10A及び図10Bに示されるようにアクセル開度Aが所定値を下回って境界値に近付いたか否かを判定する。アクセル開度が所定値を下回ったか否かは、例えば、図15に示されるマップに基づいて判定される。すなわち、エンジン回転速度に応じてマップから求められる所定値をアクセル開度が下回ったか否かが判定される。こうしたマップは、例えば予め行われる実験の結果に基づいて作成することが可能である。
【0099】
アクセル開度が所定値を下回っている場合には(S5:YES)、変化抑制部59は、S6に進み、スロットル開度が下降するときの時間変化率を低減する。また、変化抑制部59は、スロットル開度が下降するときの時間変化率のみならず、スロットル開度が上昇するときの時間変化率を低減してもよい。なお、本例では、アクセル開度が所定値を下回った場合にスロットル開度の時間変化率を低減しているが、これに限られず、スロットル開度が所定値を下回った場合にスロットル開度の時間変化率を低減してもよい。
【0100】
他方、パワーオフ状態である場合には(S4:NO)、変化抑制部59は、S7に進み、アクセル開度が所定値を上回っているか否かを判定する。すなわち、変化抑制部59は、上記図11A及び図11Bに示されるようにアクセル開度Aが所定値を上回って境界値に近付いたか否かを判定する。アクセル開度が所定値を上回ったか否かは、例えば、図16」に示されるマップに基づいて判定される。すなわち、エンジン回転速度に応じてマップから求められる所定値をアクセル開度が上回ったか否かが判定される。こうしたマップは、例えば予め行われる実験の結果に基づいて作成することが可能である。
【0101】
アクセル開度が所定値を上回っている場合には(S7:YES)、変化抑制部59は、S8に進み、スロットル開度が上昇するときの時間変化率を低減する。また、変化抑制部59は、スロットル開度が上昇するときの時間変化率のみならず、スロットル開度が下降するときの時間変化率を低減してもよい。なお、本例では、アクセル開度が所定値を上回った場合にスロットル開度の時間変化率を低減しているが、これに限られず、スロットル開度が所定値を上回った場合にスロットル開度の時間変化率を低減してもよい。
【0102】
S6又はS8の後、S9において開度決定部57は目標スロットル開度を決定し、S10においてエンジン制御部53は、目標スロットル開度に応じてスロットルアクチュエータ23を駆動する。また、S3において変速制御中でない場合や、S5においてアクセル開度が所定値以上である場合、S7においてアクセル開度が所定値以下である場合にも、S9及びS10が実行される。
【0103】
ところで、上記S4では、パワーオン状態であるかパワーオフ状態であるかが判定される。パワーオン状態での変速制御には、第1の制御モード(パワーオンシフトアップ制御)と、第2の制御モード(パワーオンシフトダウン制御)とがあるが、上述したように、第2の制御モードにおける運転者のブリッピング操作では、スロットル開度が境界値に近付かないと考えられる。このため、パワーオン状態においてスロットル開度の下降の時間変化率を抑制することで、第1の制御モードにおける運転者のブリッピング操作に起因するショックを抑制することが可能である。同様に、パワーオフ状態での変速制御には、第3の制御モード(パワーオフシフトアップ制御)と、第4の制御モード(パワーオフシフトダウン制御)とがあるが、上述したように、第3の制御モードにおける運転者のブリッピング操作では、スロットル開度が境界値に近付かないと考えられる。このため、パワーオフ状態においてスロットル開度の上昇の時間変化率を抑制することで、第4の制御モードにおける運転者のブリッピング操作に起因するショックを抑制することが可能である。
【0104】
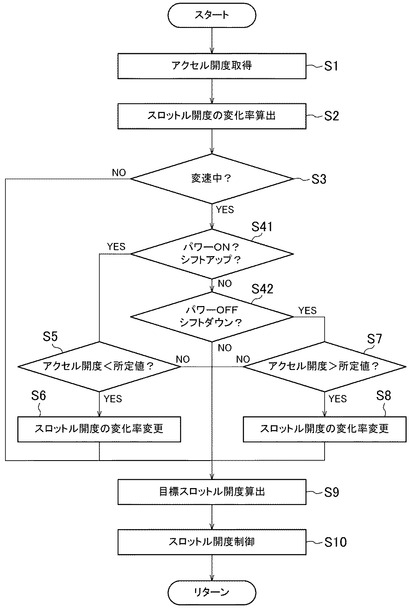
なお、当該態様に限られず、例えば図17に示されるように、変速制御部51は、S41においてパワーオンシフトアップ制御であるか否かを判定してS5に進み、S42においてパワーオフシフトダウン制御であるか否か判定してS7に進んでもよい。これによっても、上記態様と同様の効果を得ることが可能である。
【0105】
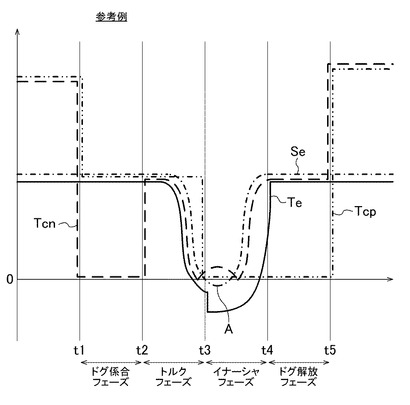
以下、上記図6Aに示される第1の制御モード(パワーオンシフトアップ制御)時にアクセルを一時的に閉じるブリッピング操作が行われた場合の詳細について説明する。図18は、上記変化抑制部59による時間変化率の抑制が行われない参考例のタイミングチャートである。変速期間中にブリッピング操作によりアクセル開度Aが一時的に下降すると、これに伴って、目標エンジントルクTe及び次クラッチCnの目標トルク容量Tcnも一時的に下降する。ここで、イナーシャフェーズ中にアクセル開度Aが下降した場合、イナーシャフェーズでは目標エンジントルクTeをアクセル開度Aに基づいて定まる値よりも下げるので、目標エンジントルクTeが負の値になりやすく、そのためにショックが生じやすい。すなわち、イナーシャフェーズが行われるツインクラッチ式の自動二輪車1の変速制御では、運転者のブリッピング操作に起因するショックが生じやすい。これは、第4の制御モード(パワーオフシフトダウン制御)時にアクセルを一時的に開けるブリッピング操作が行われる場合も同様である。
【0106】
図19は、上記変化抑制部59による時間変化率の抑制が行われる実施例のタイミングチャートである。本実施例では、変速期間中にブリッピング操作によりアクセル開度Aが一時的に下降するとき、目標エンジントルクTeの下降が抑制される。このため、イナーシャフェーズ中にアクセル開度Aが下降しても、目標エンジントルクTeが負の値になり難く、そのためショックが生じ難い。
【0107】
以上、本発明の実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、種々の変形実施が当業者にとって可能であるのはもちろんである。
【符号の説明】
【0108】
1 自動二輪車、2 前輪、1h,5i,3h,4h,6i,2h 固定ギア、5h,3i,4i,6h 可動ギア、10 制御装置、11 エンジンユニット、20 エンジン、21 クランクシャフト、30A 第1変速機構、30B 第2変速機構、31 入力軸、32 出力軸、39 シフトアクチュエータ、40A 第1クラッチ、40B 第2クラッチ、41 駆動部材、42 従動部材、49A,49B クラッチアクチュエータ、51 変速制御部、53 エンジン制御部、55 目標値決定部、57 開度決定部、59 変化抑制部、Cn 次クラッチ、Cp 前クラッチ、Gn1 可動ギア、Gn2 固定ギア、Gp1 可動ギア、Gp2 固定ギア、Tn 次変速機構、Tp 前変速機構、Se エンジン回転速度、Tcn 次クラッチの目標トルク容量、Tcp 前クラッチの目標トルク容量、Te 目標エンジントルク。
【技術分野】
【0001】
本発明は、車両の制御装置、車両及び原動機に関し、特には、ツインクラッチ式の車両における変速制御に関する。
【背景技術】
【0002】
従来、ツインクラッチ式の車両が知られている(特許文献1を参照)。ツインクラッチ式の車両は、エンジンの下流に配置され、エンジンの出力トルクが個別に入力される2つのクラッチと、各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、を備えている。変速期間中には、出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、エンジンの出力トルクとクラッチのトルク容量とに差を設けてエンジンの回転速度を変化させる回転制御と、が実行される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−251456号公報
【特許文献2】特開平6−330777号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自動二輪車等の車両では、マニュアル変速に慣れた運転者が、無意識のうちに、アップシフト変速時に一時的にアクセルを閉じる操作をしたり、ダウンシフト変速時に一時的にアクセルを開ける操作をすることがある。こうした操作は、ブリッピング操作と呼ばれる。
【0005】
しかしながら、ツインクラッチ式の車両では、何れかのクラッチが係合している上、回転制御においてエンジンの回転速度を変化させていることから、運転者によるブリッピング操作は不要であるのにも関わらず、ブリッピング操作が行われることがある。例えば、アップシフト変速時にアクセルを閉じるブリッピング操作が行われると、エンジンの出力トルクが下降し、駆動状態から被駆動状態に逆転してショックが生じるおそれがある。また、ダウンシフト変速時にアクセルを開けるブリッピング操作が行われると、エンジンの出力トルクが上昇し、被駆動状態から駆動状態に逆転してショックが生じるおそれがある。ここで、駆動状態とは、エンジンから伝達経路に出力される出力トルクが、伝達経路からエンジンに入力される負荷トルクよりも大きいことをいい、被駆動状態とはその逆をいう。
【0006】
また、こうしたブリッピング操作による変速期間中のショックを抑制するため、変速期間中にはスロットルバルブの開度をアクセルの操作量に追従させない方法が考えられる。しかしながら、この方法では、運転者によるアクセルの操作がブリッピング操作ではなかった場合に、変速期間の終了後にアクセルの操作に対するスロットルバルブの開度の追従が遅れてしまうおそれがある。
【0007】
なお、特許文献2には、ダウンシフト変速時にパワーオン状態(出力トルクが負荷トルクよりも大きい状態)を維持するために、スロットルバルブの開度をアクセルの操作量に追従させないことが記載されている。すなわち、車両停止直前のダウンシフト変速がパワーオン状態とパワーオフ状態との境界付近で行われ、変速によりエンジンの回転速度が上昇すると、パワーオン状態からパワーオフ状態に逆転しやすいことから、スロットルバルブの開度が固定される。このように、特許文献2における課題は、上述したブリッピング操作に起因する課題とは異なっている。また、特許文献2に記載された自動変速機では、そもそも運転者がブリッピング操作をするとは考え難い。
【0008】
本発明は、上記実情に鑑みて為されたものであり、ブリッピング操作による変速期間中のショックを抑制すると共に、変速期間後にアクセルの操作に応じた動作に迅速に移ることが可能な車両の制御装置、車両及び原動機を提供することを主な目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するため、本発明の車両の制御装置は、エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられる。前記制御装置は、前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する。前記制御装置は、前記アクセルの操作量に基づいて前記出力トルクの目標値を決定する目標値決定部と、前記エンジンの回転速度の下降を伴う前記変速期間中において、前記出力トルクの目標値が、前記伝達経路から前記エンジンに入力される負荷トルクよりも大きい値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記出力トルクの目標値の時間変化率を低減する変化抑制部と、を備える。
【0010】
また、本発明の車両の制御装置は、エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられる。前記制御装置は、前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する。前記制御装置は、前記アクセルの操作量に基づいて前記出力トルクの目標値を決定する目標値決定部と、前記エンジンの回転速度の上昇を伴う前記変速期間中において、前記出力トルクの目標値が、前記伝達経路から前記エンジンに入力される負荷トルクよりも小さい値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記出力トルクの目標値の時間変化率を低減する変化抑制部と、を備える。
【0011】
また、本発明の車両の制御装置は、エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられる。前記制御装置は、前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する。前記制御装置は、前記アクセルの操作量に基づいて前記スロットルバルブの開度を決定する開度決定部と、前記エンジンの回転速度の下降を伴う前記変速期間中において、前記スロットルバルブの開度が、前記伝達経路から前記エンジンに入力される負荷トルクよりも前記出力トルクが大きくなる値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記スロットルバルブの開度の時間変化率を低減する変化抑制部と、を備える。
【0012】
また、本発明の車両の制御装置は、エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられる。前記制御装置は、前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する。前記制御装置は、前記アクセルの操作量に基づいて前記スロットルバルブの開度を決定する開度決定部と、前記エンジンの回転速度の上昇を伴う前記変速期間中において、前記スロットルバルブの開度が、前記伝達経路から前記エンジンに入力される負荷トルクよりも前記出力トルクが小さくなる値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記スロットルバルブの開度の時間変化率を低減する変化抑制部と、を備える。
【0013】
また、本発明の車両は、上記制御装置を備える。また、本発明の原動機は、上記制御装置を備える。
【発明の効果】
【0014】
本発明によると、変速期間中に駆動状態と被駆動状態とが逆転することが抑制されるので、この結果、ブリッピング操作による変速期間中のショックを抑制することが可能である。また、変速期間中に出力トルクの目標値またはスロットルバルブの開度を固定することなく、時間変化率を低減することで、変速期間後にアクセルの操作に応じた動作に迅速に移ることが可能である。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施形態に係る制御装置を備えた自動二輪車の側面図である。
【図2】上記自動二輪車のエンジンから後輪に至るトルク伝達経路に設けられた機構の概略図である。
【図3】上記自動二輪車の構成を示すブロック図である。
【図4】変速制御の概要を説明するための図である。
【図5】変速制御の複数の制御モードを示す図である。
【図6A】第1の制御モードの例を説明するためのタイムチャートである。
【図6B】第2の制御モードの例を説明するためのタイムチャートである。
【図6C】第3の制御モードの例を説明するためのタイムチャートである。
【図6D】第4の制御モードの例を説明するためのタイムチャートである。
【図7】第1の制御モードの動作例を表すフローチャートである。
【図8】イナーシャフェーズ発生時間のテーブルの内容例を示す図である。
【図9】制御装置の機能構成例を表すブロック図である。
【図10A】第1の制御モード時のスロットル開度の時間変化例を表す図である。
【図10B】第1の制御モード時のスロットル開度の時間変化例を表す図である。
【図11A】第4の制御モード時のスロットル開度の時間変化を表す図である。
【図11B】第4の制御モード時のスロットル開度の時間変化を表す図である。
【図12】制御装置の機能構成の変形例を表すブロック図である。
【図13】制御装置の動作例を表すフローチャートである。
【図14】パワーオン判定用のマップを表す図である。
【図15】抑制判定用のマップを表す図である。
【図16】抑制判定用のマップを表す図である。
【図17】制御装置の機能構成の変形例を表すフローチャートである。
【図18】第1の制御モード時にブリッピング操作が行われた場合のタイムチャートである。
【図19】第1の制御モード時にブリッピング操作が行われた場合のタイムチャートである。
【発明を実施するための形態】
【0016】
本発明の車両の制御装置、車両及び原動機の実施形態を、図面を参照しながら説明する。
【0017】
図1は、本発明の一実施形態に係る制御装置10を備えた自動二輪車1の側面図である。図2は、エンジン20から後輪3に至るトルク伝達経路に設けられた機構の概略図である。図3は、本発明の車両の一実施形態である自動二輪車1の構成を示すブロック図である。
【0018】
図1に示すように、自動二輪車1は、本発明の原動機の一実施形態であるエンジンユニット11を備えている。エンジンユニット11の前方に配置される前輪2は、フロントフォーク4の下端で支持されている。フロントフォーク4の上部には車体フレーム(不図示)の最前部で回転可能に支持されたステアリングシャフト5が連結されている。ステアリングシャフト5の上方にはステアリング6が設けられている。ステアリング6とフロントフォーク4と前輪2は、ステアリングシャフト5を中心にして一体的に左右に回転可能となっている。
【0019】
ステアリング6の後方には搭乗者が跨って座ることのできるシート7が配置されている。エンジンユニット11の後方には後輪3が配置されている。変速機30(図2参照)から出力されるトルクはチェーンやベルト、ドライブシャフトなどのトルク伝達部材(不図示)を介して後輪3に伝達される。
【0020】
図2に示すように、エンジンユニット11はエンジン20と変速機30とを備えている。自動二輪車1は所謂ツインクラッチ式の車両であり、第1クラッチ40Aと第2クラッチ40Bとがエンジンユニット11に設けられている。エンジン20はその駆動によって回転するクランクシャフト21を備えている。
【0021】
エンジン20のトルク(クランクシャフト21の回転)は、第1クラッチ40Aと第2クラッチ40Bのそれぞれに入力される。第1クラッチ40Aと第2クラッチ40Bは、クランクシャフト21の回転に連動する駆動部材41を有している。図2に示す例では、クランクシャフト21は2つのプライマリギア21aを有している。第1クラッチ40Aの駆動部材41と第2クラッチ40Bの駆動部材41とにはプライマリギア41aが設けられている。プライマリギア41aはプライマリギア21aと噛み合っている。
【0022】
第1クラッチ40Aと第2クラッチ40Bは、後述する変速機構30A,30Bの入力軸31に連動する従動部材42を有している。第1クラッチ40Aと第2クラッチ40Bは例えば単板又は多板の摩擦クラッチである。駆動部材41と従動部材42が互いに軸方向で押し付けられることにより、それらの間でトルクの伝達がなされる。なお、駆動部材41は例えばフリクションディスクであり、従動部材42は例えばクラッチディスクである。
【0023】
変速機30は第1変速機構30Aと第2変速機構30Bとを備えている。第1変速機構30Aと第2変速機構30Bは第1クラッチ40Aと第2クラッチ40Bの下流にそれぞれ配置されている。すなわち、第1変速機構30Aと第2変速機構30Bのそれぞれに入力軸31が設けられている。第1変速機構30Aの入力軸31は第1クラッチ40Aの従動部材42に連結されており、第1変速機構30Aには第1クラッチ40Aを介してトルクが入力される。第2変速機構30Bの入力軸31は第2クラッチ40Bの従動部材42に連結され、第2変速機構30Bには第2クラッチ40Bを介してトルクが入力される。第1変速機構30A,30Bは共通の出力軸32を有している。このように、自動二輪車1はエンジン20のクランクシャフト21から変速機30の出力軸32に至るトルク伝達経路として2つの経路を有している。第1の経路は、第1変速機構30Aと第1クラッチ40Aとによって構成され、第2の経路は第2変速機構30Bと第2クラッチ40Bとによって構成される。変速機30の出力軸32は、チェーンやベルト、シャフトなどで構成されたトルク伝達部材介して後輪3の車軸に連結されている。
【0024】
第1変速機構30Aと第2変速機構30Bは複数のギア1i〜6i及び1h〜6hを含んでいる。ギア1i〜6iは入力軸31に設けられ、ギア1h〜6hは出力軸32に設けられている。ギア1iとギア1hは互いに噛み合っており、それらの減速比は1速に対応している。同様に、ギア2i乃至6iはギア2h乃至6hとそれぞれ噛み合っており、それらの減速比は2速乃至6速にそれぞれ対応している。この例では、第1変速機構30Aは奇数変速段に対応するギア1i,3i,5i,1h,3h,5hによって構成され、第2変速機構30Bは偶数変速段に対応するギア2i、4i,6i,2h,4h,6hによって構成されている。
【0025】
変速機構30A,30Bは所謂選択摺動式の変速機構である。各変速段に対応したギア対(例えば、ギア1iとギア1h)のうちいずれか一方は、当該一方のギアが設けられた軸に対して相対回転自在となっている。これに対して、他方のギアは当該他方のギアが設けられた軸とスプラインで噛み合っており、当該軸と一体的に回転する。この例では、ギア1h,5i,3h,4h,6i,2hが、それらのギアが設けられた軸に対して相対回転自在となっている。一方、ギア1i,5h,3i,4i,6h,2iは、それらが設けられた軸と噛み合っており、当該軸と一体的に回転する。そのため、中立状態(いずれの変速段にも設定されていない状態)においては、ギア対(5i,5h)及び(6i,6h)は出力軸32に連動し、ギア対(1i,1h)、(3i,3h)、(4i,4h)及び(2i,2h)は入力軸31に連動する。
【0026】
入力軸31に連動するギアと出力軸32に連動するギアは、軸方向で互いに隣り合うように配置され、且つ、軸方向に相対移動可能(接近方向及び離れる方向への移動が可能)となっている。また、複数のギア1i〜6i,1h〜6hは、ドッグクラッチ(dog clutch)が形成されたギアを含んでいる。入力軸31に連動するギアと出力軸32に連動するギアは、ドッグクラッチによって係合可能となっている。これらの2つのギアの係合によって、第1変速機構30Aの入力軸31又は第2変速機構30Bの入力軸31の回転(トルク)は、出力軸32に伝達される。なお、図2の例では、ギア5h,3i,4i,6hが軸方向に移動可能となっている。
【0027】
図2に示すように、変速機30には軸方向に移動可能なギア5h,3i,4i,6h(以下、可動ギア)を軸方向に移動させるシフトアクチュエータ39が設けられている。シフトアクチュエータ39は、可動ギアに引っ掛かる複数のシフトフォーク39aや、回転することによってシフトフォーク39aを軸方向に動かすシフトカム39b、シフトカム39bを回転させる動力を発生する電動モータ39c等を含んでいる。シフトアクチュエータ39は制御装置10による制御の下で可動ギアを動かし、変速段を切り換える。
【0028】
クラッチ40A,40Bには、これらを制御装置10による制御の下で動かす(すなわちクラッチ40A,40Bを係合状態にしたり、解放状態にする)クラッチアクチュエータ49A,49Bが設けられている。クラッチアクチュエータ49A,49Bは例えば電動モータを含んでいる。電動モータの動力は、油圧やロッドを介してプレッシャープレート43に伝えられ、駆動部材41と従動部材42とを軸方向で互いに押し付ける。
【0029】
図3に示すように、エンジン20には、燃料噴射装置22とスロットルアクチュエータ23と点火プラグ24とが設けられている。燃料噴射装置22はエンジン20の燃焼室で燃焼させる燃料をエンジン20に供給する。スロットルアクチュエータ23はエンジン20の吸気路を流れる空気量を調整するスロットルバルブ(不図示)の開度を制御する。点火プラグ24はエンジン20の燃焼室に流れ込んだ空気と燃料の混合気に点火する。燃料噴射装置22の燃料噴射量、点火プラグ24の点火タイミング、及び、スロットルバルブの開度(以下、スロットル開度)は制御装置10によって制御される。
【0030】
自動二輪車1は、エンジン回転速度センサ19aと、ギア位置センサ19bと、クラッチセンサ19c,19dと、出力側回転センサ19eと、シフトスイッチ19fと、アクセルセンサ19gと、を含んでいる。これらのセンサは制御装置10に接続されている。
【0031】
エンジン回転速度センサ19aはエンジン回転速度に応じた周波数のパルス信号を出力する回転センサによって構成される。制御装置10はエンジン回転速度センサ19aの出力信号に基づいてエンジン回転速度(クランクシャフト21の回転速度)を算出する。
【0032】
ギア位置センサ19bは例えばシフトカム39bの回転角に応じた電圧信号を出力するポテンショメータによって構成される。制御装置10はギア位置センサ19bの出力信号に基づいて、可動ギア5h,3i,4i,6hの位置や現在の変速段などを検知する。
【0033】
出力側回転センサ19eは後輪3の車軸や、出力軸32に設けられる。出力側回転センサ19eは、例えば後輪3の回転速度や、出力軸32の回転速度に応じた周波数のパルス信号を出力する回転センサである。制御装置10は出力側回転センサ19eの出力信号に基づいて車速や出力軸32の回転速度を算出する。
【0034】
シフトスイッチ19fは搭乗者によって操作されるスイッチであり、搭乗者の変速指令(変速段を上げるシフトアップ指令を示す信号、変速段を下げるシフトダウン指令を示す信号)を制御装置10に対して入力する。なお、シフトスイッチ19fはシフトアップ用のスイッチとシフトダウン用のスイッチとが設けられる。
【0035】
アクセルセンサ19gはステアリング6に設けられたアクセルグリップ(不図示)の操作量(回転角)に応じた信号を出力する。アクセルセンサ19gは例えばポテンショメータによって構成される。制御装置10はアクセルセンサ19gの出力信号に基づいてアクセルグリップの操作量(アクセル操作量)を検知する。
【0036】
クラッチセンサ19cは、第1クラッチ40Aの伝達トルク容量(現在の第1クラッチ40Aの状態(現在の係合度合い)で伝達可能な最大トルク)を検出するためのセンサである。また、クラッチセンサ19dは、第2クラッチ40Bの伝達トルク容量(現在の第2クラッチ40Bの状態(現在の係合度合い)で伝達可能な最大トルク)を検出するためのセンサである。クラッチ40A,40Bが係合状態にある時に伝達トルク容量は最大となり、クラッチ40A,40Bが解放状態にある時に伝達トルク容量は最小(例えば0Nm)となる。クラッチセンサ19c,19dは、例えば、プレッシャープレート43の変位量を検出する。
【0037】
伝達トルク容量はクラッチ40A,40Bの位置(クラッチのストローク量)に対応している。クラッチセンサ19c,19dは、例えば、クラッチ40A,40Bの位置に応じた信号(クラッチアクチュエータ49A,49Bの動作量に応じた信号)を出力するポテンショメータである。制御装置10は、クラッチセンサ19c,19dの出力信号に基づいて検知されるクラッチ位置から伝達トルク容量を検知する。例えば、制御装置10は、クラッチ位置と伝達トルク容量とを対応付けるマップや演算式を用いて、検知したクラッチ位置から伝達トルク容量を算出する。
【0038】
クラッチアクチュエータ49A,49Bが油圧によってクラッチ40A,40Bを動かす構造においては、伝達トルク容量はクラッチ40A,40Bに作用する油圧(以下、クラッチ圧)に対応している。そういった構造においては、クラッチセンサ19c,19dはクラッチ圧に応じた信号を出力する油圧センサでもよい。この場合、制御装置10は、クラッチセンサ19c,19dの出力信号に基づいて検知されるクラッチ圧から伝達トルク容量を検知する。例えば、制御装置10は、クラッチ圧と伝達トルク容量とを対応付けるマップや演算式を用いて、検知したクラッチ圧から伝達トルク容量を算出する。
【0039】
また、伝達トルク容量はクラッチアクチュエータ49A,49Bからクラッチ40A,40Bに作用する力(駆動部材41と従動部材42の間に作用する押し付け力)に対応している。クラッチアクチュエータ49A,49Bからクラッチ40A,40Bに作用する力によって、その力を受けている部分(例えば、クラッチ40A,40Bのケースなど)が歪む。そこで、クラッチセンサ19c,19dは、当該クラッチ40A,40Bから力を受ける部分の歪みの大きさに応じた信号を出力する歪みセンサでもよい。その場合、制御装置10は、クラッチセンサ19c,19dの出力信号に基づいて検知する歪みから伝達トルク容量を検知する検知する。例えば、制御装置10は、クラッチの歪みと伝達トルク容量とを対応付けるマップや演算式を用いて、検知した歪みから伝達トルク容量を算出する。
【0040】
制御装置10はCPU(Central Processing Unit)と、ROM(Read Only Memory)やRAM(Random Access Memory)などのメモリとを備えている。制御装置10はメモリに格納されたプログラムをCPUにおいて実行し、エンジン20、変速機30、及びクラッチ40A,40Bを制御する。
【0041】
具体的には、制御装置10は、エンジン20の出力トルクについての目標値(以下において目標エンジントルクとする)を設定し、実際の出力トルクが目標エンジントルクになるようにスロットルアクチュエータ23や燃料噴射装置22、点火プラグ24を駆動する。また、制御装置10は、第1クラッチ40Aの伝達トルク容量と第2クラッチ40Bの伝達トルク容量とについて目標値(以下において目標トルク容量とする)を設定し、実際の伝達トルク容量が目標トルク容量になるように、クラッチアクチュエータ49A,49Bを動かす。さらに、制御装置10は、第1変速機構30A及び第2変速機構30Bで設定される変速段が変速指令に応じたものとなるように、シフトアクチュエータ39を動かす。
【0042】
変速制御の概要について説明する。なお、以下の説明において、第1クラッチ40Aと第2クラッチ40Bのうち、変速の前にエンジン20のトルクを伝達しているクラッチを前クラッチとし、他方のクラッチ(すなわち、エンジン20のトルクの伝達を変速指令によって開始するクラッチ)を次クラッチとする。同様に、第1変速機構30Aと第2変速機構30Bのうち、変速の前にエンジン20のトルクを伝達している変速機構を前変速機構とし、他方の変速機構(すなわちエンジン20のトルクの伝達を変速指令によって開始する変速機構)を次変速機構とする。
【0043】
図4は変速制御の概要を説明するための図である。同図においは、図2に示す変速機構30A,30B、クラッチ40A,40Bがさらに簡略化して示されている。同図においてクラッチCpが前クラッチであり、クラッチCnが次クラッチである。また、変速機構Tpが前変速機構であり、変速機構Tnが次変速機構である。また、前変速機構TpのギアGp1は、前の変速段でトルクを伝達している可動ギア(5h、3i、4i、又は6h)を示し、ギアGp2は前の変速段でトルクを伝達している固定ギア(1h、5i、3h、4h、6i、又は2h)を示している。さらに、次変速機構TnのギアGn1は、次の変速段でトルクを伝達する可動ギアを示し、ギアGn2は次の変速段でトルクを伝達する固定ギアを示している。この図では、簡略化のために、1つの可動ギアGp1,Gn1と1つの固定ギアGp2,Gn2が示されている。この図においては、固定ギアGp2,Gn2が出力軸32に固定されており(すなわち出力軸32とスプラインで噛み合っており)、出力軸32と一体的に回転する。可動ギアGp1,Gn1は、出力軸32に対して自由に相対回転できる。また、可動ギアGp1,Gn1は、入力軸31に固定されたギアGp3,Gn3とそれぞれ噛み合っており、ギアGp3,Gn3や入力軸31の回転に連動する。
【0044】
図4(a)に示すように、通常走行においては、2つのクラッチCp,Cnは係合状態(伝達トルク容量が最大の状態)に設定されている。前変速機構Tpにおいては、前の変速段に対応する可動ギアGp1と固定ギアGp2とがドッグクラッチによって係合している。また、次変速機構Tnにおいては全ての可動ギアが中立位置(いずれの固定ギアとも係合しない位置)に配置される。そのため、エンジン20のトルクは、2つのトルク伝達経路のうち一方の経路(前クラッチCp及び前変速機構Tp)を介して、後輪3に向けて伝達されている。他方の経路においては次変速機構Tnにおいてトルク伝達が遮断されている。
【0045】
変速指令が生じたとき、制御装置10はトルクを伝達する経路を一方から他方に切り換える。すなわち、制御装置10は次変速機構Tnの可動ギアGn1と固定ギアGn2とを係合させ、前変速機構Tpの可動ギアGp1を中立位置にする。具体的には、変速機構Tp,TnとクラッチCp,Cnは、変速制御において次のように動かされる。まず、制御装置10は、図4(b)のS1に示されるように次クラッチCnの係合を解除し、S2に示されるように次変速機構Tnの可動ギアGn1を動かし、隣の固定ギアGn2に係合させる(所謂ドグ係合フェーズ)。その後、制御装置10は、図4(c)のS3に示されるように次クラッチCnを解放状態から係合状態に戻し、それと共に前クラッチCpを解放状態にする(所謂トルクフェーズ)。最後に、制御装置10は、図4(d)のS4に示されるように前変速機構Tpの可動ギアGp1を中立位置まで移動させた後に、前クラッチCpを係合状態にする(所謂ドグ解放フェーズ)。
【0046】
なお、こうした変速制御を実行する際、変速中の後輪3の駆動力の増減(変速ショック)を抑えるために、前クラッチCp又は次クラッチCnの駆動部材41の回転速度と従動部材42の回転速度とを一致させるための回転制御(所謂イナーシャフェーズ)が、トルクフェーズ(図4(c)のS3を参照)の前または後に必要となる場合がある。以下に説明する制御装置10の変速制御の複数の制御モードは、トルクフェーズがイナーシャフェーズの前に行われるものと、イナーシャフェーズがトルクフェーズの前に行われるものと、に大きく分けられる。
【0047】
図5は、制御装置10の変速制御の複数の制御モードを示す図である。制御装置10は変速制御として4つの制御モードを備えている。第1の制御モードは、アクセルを開いた状態でのシフトアップ制御(パワーオンシフトアップ制御)である。第2の制御モードは、アクセルを開いた状態でのシフトダウン制御(パワーオンシフトダウン制御)である。第3の制御モードは、アクセルを閉じた状態でのシフトアップ制御(パワーオフシフトアップ制御)である。第4の制御モードは、アクセルを閉じた状態でのシフトダウン制御(パワーオフシフトダウン制御)である。
【0048】
以下、各々の制御モードについて説明する。図6A〜図6Dは、各々の制御モードの例を説明するためのタイムチャートである。
【0049】
[第1の制御モード]
図6Aは、制御装置10が実行する第1の制御モード(パワーオンシフトアップ制御)の例を説明するためのタイムチャートである。同図において、一点鎖線はエンジン回転速度Seを表し、実線は目標エンジントルクTeを表し、破線は次クラッチCnの目標トルク容量Tcnを表し、二点鎖線は前クラッチCpの目標トルク容量Tcpを表している。このうち、破線及び二点鎖線は、目標トルク容量を一次減速比で除した値となっている。なお、同図では、各々の線を互いに重ならないよう縦又は横方向に僅かにずらしている。この第1の制御モードでは、トルクフェーズとイナーシャフェーズとがこの順に実行される。
【0050】
まず、制御装置10は、ドグ係合フェーズを開始する(t1)。具体的には、制御装置10は、次クラッチCnを係合状態から解放状態に変化させる。係合状態とは伝達トルク容量が最大となる状態であり、解放状態とは伝達トルク容量が最小(例えば0Nm)となる状態である。また、制御装置10は、シフトアクチュエータ39を駆動して、次変速機構Tnの可動ギアGn1を固定ギアGn2に向けて移動させる。また、制御装置10は、前クラッチCpを係合状態から半係合状態に変化させる。ここでは、前クラッチCpの目標トルク容量Tcpが目標エンジントルクTeに対応する値まで下げられる。
【0051】
次に、制御装置10は、トルクフェーズを開始して、エンジン20のトルクを伝達する経路を切り換える(t2)。制御装置10は、前クラッチCpを半係合状態から解放状態に変化させ、次クラッチCnを解放状態から半係合状態に変化させる。具体的には、制御装置10は、次クラッチCnの目標トルク容量Tcpを目標エンジントルクTeに対応する値まで上げる。
【0052】
次に、制御装置10は、イナーシャフェーズを開始して、エンジン回転速度Seを低下させる(t3)。具体的には、制御装置10は、目標エンジントルクTeを次クラッチCnの目標トルク容量Tcnより相対的に下げることで、エンジン回転速度Seを低下させる。換言すると、制御装置10は、次クラッチCnの目標トルク容量Tcnを目標エンジントルクTeより相対的に上げることで、エンジン回転速度Seを低下させる。
【0053】
次に、制御装置10は、ドグ解放フェーズを開始する(t4)。具体的には、制御装置10は、シフトアクチュエータ39を駆動して、前変速機構Tpの可動ギアGp1を中立位置に向けて移動させる。その後、制御装置10は、前クラッチCpと次クラッチCnを係合状態に戻す(t5)。これにより、第1の制御モードに係る変速制御が終了する。
【0054】
[第2の制御モード]
図6Bは、制御装置10が実行する第2の制御モード(パワーオンシフトダウン制御)の例を説明するためのタイムチャートである。以下、上記制御モードと異なる点を主に説明する。この第2の制御モードでは、イナーシャフェーズとトルクフェーズとがこの順に実行される。
【0055】
制御装置10は、ドグ係合フェーズの次に、イナーシャフェーズを開始して、エンジン回転速度Seを増加させる(t2)。具体的には、制御装置10は、エンジントルクTeを前クラッチCpの目標トルク容量Tcpより相対的に上げることで、エンジン回転速度Seを増加させる。換言すると、制御装置10は、前クラッチCpの目標トルク容量Tcpを目標エンジントルクTeより相対的に上げることで、エンジン回転速度Seを増加させる。その後、制御装置10は、トルクフェーズとドグ解放フェーズとを実行する。これにより、第2の制御モードに係る変速制御が終了する。
【0056】
[第3の制御モード]
図6Cは、制御装置10が実行する第3の制御モード(パワーオフシフトアップ制御)の例を説明するためのタイムチャートである。以下、上記制御モードと異なる点を主に説明する。この第3の制御モードでは、イナーシャフェーズとトルクフェーズとがこの順に実行される。この第3の制御モードでは、目標エンジントルクTeが負の値になる。
【0057】
制御装置10は、ドグ係合フェーズの次に、イナーシャフェーズを開始して、エンジン回転速度Seを低下させる(t2)。具体的には、制御装置10は、目標エンジントルクTeの絶対値を前クラッチCpの目標トルク容量Tcpより相対的に上げることで(すなわち、目標エンジントルクTeを下げることで)、エンジン回転速度Seを低下させる。換言すると、制御装置10は、前クラッチCpの目標トルク容量Tcpを目標エンジントルクTeの絶対値より相対的に下げることで、エンジン回転速度Seを低下させる。その後、制御装置10は、トルクフェーズとドグ解放フェーズとを実行する。これにより、第3の制御モードに係る変速制御が終了する。
【0058】
[第4の制御モード]
図6Dは、制御装置10が実行する第4の制御モード(パワーオフシフトダウン制御)の例を説明するためのタイムチャートである。以下、上記制御モードと異なる点を主に説明する。この第4の制御モードでは、トルクフェーズとイナーシャフェーズとがこの順に実行される。この第4の制御モードでは、目標エンジントルクTeが負の値になる。
【0059】
次に、制御装置10は、トルクフェーズの次に、イナーシャフェーズを開始して、エンジン回転速度Seを増加させる(t3)。具体的には、制御装置10は、目標エンジントルクTeの絶対値を次クラッチCnの目標トルク容量Tcnより相対的に下げることで(すなわち、目標エンジントルクTeを上げることで)、エンジン回転速度Seを増加させる。換言すると、制御装置10は、次クラッチCnの目標トルク容量Tcnを目標エンジントルクTeの絶対値より相対的に上げることで、エンジン回転速度Seを増加させる。その後、制御装置10は、ドグ解放フェーズを実行する。これにより、第4の制御モードに係る変速制御が終了する。
【0060】
以下、上記第1〜第4の制御モード(図6A〜図6D)の中から代表して、第1の制御モード(パワーオンシフトアップ制御)の具体的な動作例を説明する。図7は、第1の制御モードの動作例を表すフローチャートである。
【0061】
S201において、制御装置10は、変速制御が第1の制御モード(パワーオンシフトアップ制御)であるか否かを判定する。第1の制御モードではない場合(S201:NO)、制御装置10は処理を終了する。
【0062】
S202において、制御装置10は、ドグ係合指令を出力して、ドグ係合フェーズを実行する(上記図6のt1)。ドグ係合指令は、次クラッチCnを係合状態から解放状態に変化させる指令と、次変速機構Tnの可動ギアGn1を固定ギアGn2に向けて移動させる指令と、を含んでいる。また、ドグ係合指令は、前クラッチCpを係合状態から半係合状態に変化させる指令を含んでいる。具体的には、前クラッチCpの目標トルク容量は、これを一次減速比で除した値が目標エンジントルクと同じになるように設定される。
【0063】
S203において、制御装置10は、ドグ係合フェーズが完了したか否かを判定する。判定方法としては、次の方法が考えられる。例えば、ギア位置センサ19bからの信号に基づき、シフトカム39bの位置がドグ係合に対応する範囲内にあるときに、ドグ係合フェーズの完了が判定される。また、入力軸32の回転速度を検出するセンサが設けられる場合には、エンジン回転速度を一次減速比で除した値と入力軸回転速度との差がドグ係合に対応する範囲内にあるときに、ドグ係合フェーズの完了が判定されてもよい。
【0064】
S204において、制御装置10は、トルクフェーズを実行する(上記図6のt2)。トルクフェーズの開始時には、制御装置10は、前クラッチCpを解放状態に変化させる指令と、次クラッチCnを半係合状態に変化させる指令と、が出力される。具体的には、次クラッチCnの目標トルク容量は、これを一次減速比で除した値が目標エンジントルクと同じになるように設定される。
【0065】
S205において、制御装置10は、トルクフェーズが完了したか否かを判定する。具体的にはクラッチセンサ19c,19dからの信号に基づいて、クラッチ40A,40Bの伝達トルク容量が目標トルク容量に到達したか否かが判定される。
【0066】
S206において、制御装置10は、イナーシャトルクを算出する。イナーシャトルクは、イナーシャフェーズにおいて適用される目標エンジントルクである(上記図6のTe)。イナーシャトルクは、例えば、(現在エンジン回転速度−変速後到達エンジン回転速度)/イナーシャフェーズ発生時間×クランク周りイナーシャの式により求められる。イナーシャフェーズ発生時間は、例えば、図8に示されるようなイナーシャフェーズ発生時間が変速段とアクセル開度とに対応付けられたテーブルから読み出される。また、クランク周りイナーシャは、クランクシャフト21の軸回りに存在する重量物によるイナーシャであり、エンジン20の設計段階などにおいて予め求めることができる。
【0067】
S207において、制御装置10は、イナーシャフェーズを実行し、エンジン回転速度Seを低下させる(上記図6のt3)。イナーシャフェーズが開始されると、目標エンジントルクは上記S206で算出されたイナーシャトルクに設定される。また、前クラッチCpの目標伝達トルクは最小値(例えば0Nm)に設定される。また、次クラッチCnの目標伝達トルクは、アクセル開度から決まる目標エンジントルクに1次減速比を乗じ、さらにオフセットトルクを加算した値に設定される。ここで、オフセットトルクは、次クラッチCnの目標伝達トルクTcnが実際の伝達トルク容量と異なるためにイナーシャフェーズが進行しないような状況を解消するための値で、例えばS207が開始されてからの経過時間に応じて定まる値とされる。
【0068】
S208において、制御装置10は、イナーシャフェーズが完了したか否かを判定する。例えば、|ドライブ軸回転速度×変速後ギア比×1次減速比−エンジン回転速度|< 閾値 の式が成立したときに、イナーシャフェーズの完了が判定される。また、例えば、(ドライブ軸回転速度×変速前ギア比×1次減速比−エンジン回転速度)/(ドライブ軸回転速度×(変速前ギア比−変速後ギア比)×1次減速比)> 閾値 の式が成立したときに、イナーシャフェーズの完了が判定されてもよい。また、例えば、上記2つの式の一方または両方が成立したときに、イナーシャフェーズの完了が判定されてもよい。
【0069】
S209において、制御装置10は、目標エンジントルクを、アクセル開度から求まる通常の値に戻す。
【0070】
S210において、制御装置10は、ドグ解放指令を出力して、ドグ解放フェーズを実行する(上記図6のt4)。ドグ解放指令は、前変速機構Tpの可動ギアGn1を中立位置に移動させる指令を含んでいる。
【0071】
S211において、制御装置10は、ドグ解放フェーズが完了したか否かを判定する。判定方法としては、次の方法が考えられる。例えば、ギア位置センサ19bからの信号に基づき、シフトカム39bの位置がドグ解放に対応する範囲内にあるときに、ドグ解放フェーズの完了が判定される。また、入力軸32の回転速度を検出するセンサが設けられる場合には、エンジン回転速度を一次減速比で除した値と入力軸回転速度との差がドグ解放に対応する範囲内にあるときに、ドグ解放フェーズの完了が判定されてもよい。
【0072】
S212において、制御装置10は、前クラッチCp及び次クラッチCnを係合状態に変化させる指令を出力する。以上により、第1の制御モード(パワーオンシフトアップ制御)に係る変速制御が終了する。
【0073】
ところで、マニュアル変速に慣れた運転者は、ツインクラッチ式の自動二輪車1では不要であるにも関わらず、アップシフト変速時に一時的にアクセルを閉じたり、ダウンシフト変速時に一時的にアクセルを開けるブリッピング操作を無意識のうちに行うことがある。例えば、上記第1の制御モード(パワーオンシフトアップ制御)時にアクセルを閉じるブリッピング操作が行われると、エンジン20の出力トルクが下降し、駆動状態から被駆動状態に逆転してショックが生じるおそれがある。また、上記第4の制御モード(パワーオフシフトダウン制御)時にアクセルを開けるブリッピング操作が行われると、エンジン20の出力トルクが上昇し、被駆動状態から駆動状態に逆転してショックが生じるおそれがある。ここで、駆動状態とは、エンジン20からトルク伝達経路に出力される出力トルクが、トルク伝達経路からエンジン20に入力される負荷トルクよりも小さい状態をいい、被駆動状態とはその逆の状態をいう。
【0074】
そこで、本実施形態では、変速期間中にブリッピング操作が行われたときにショックの発生を抑制するべく、以下に説明する制御を実行する。
【0075】
図9は、制御装置10の機能構成例を表すブロック図である。制御装置10は、変速制御部51と、エンジン制御部53と、目標値決定部55と、変化抑制部59と、を備えている。また、エンジン制御部53は、開度決定部57を含んでいる。制御装置10に含まれる各部は、制御装置10のCPUがメモリに格納されたプログラムを実行することで実現される。
【0076】
変速制御部51は、シフトスイッチ19fから変速指令が入力されると、変速制御を実行し、クラッチアクチュエータ49A,49B及びシフトアクチュエータ39を駆動する(上記図5〜図7を参照)。また、変速制御部51は、目標値決定部55から供給される目標エンジントルクに基づいて、クラッチ40A,40Bの目標トルク容量や、イナーシャフェーズで用いるイナーシャトルクを算出する。
【0077】
エンジン制御部53は、目標値決定部55から供給される目標エンジントルクに、エンジン20の実際の出力トルクが近づくように、エンジン20に設けられた燃料噴射装置22、スロットルアクチュエータ23及び点火プラグ24を駆動する。例えば、エンジン20の出力トルクを上昇させる場合には、スロットルアクチュエータ23により調整されるスロットル開度を増加させる。また、エンジン20の出力トルクを下降させる場合には、スロットルアクチュエータ23により調整されるスロットル開度を減少させる。また、燃料噴射装置22により噴射される燃料の量を減少させたり、点火プラグ24による点火タイミングを遅らせてもよい。
【0078】
具体的には、エンジン制御部53に含まれる開度決定部57が、目標値決定部55から供給される目標エンジントルクに応じて目標スロットル開度を決定し、エンジン20に設けられたスロットルアクチュエータ23を駆動する。例えば、目標スロットル開度と目標エンジントルクとは線形の関係にある。また、開度決定部57は、変化抑制部59からの抑制指令に応じてスロットル開度の時間変化率を抑制する。
【0079】
目標値決定部55は、アクセルセンサ19gから入力されるアクセル操作量に基づいて目標エンジントルクを決定し、変速制御部51及びエンジン制御部53に供給する。例えば、目標値決定部55は、メモリに格納されたアクセル操作量と目標エンジントルクとの関係を表すマップを参照することで、目標エンジントルクを決定する。また、目標値決定部55は、イナーシャフェーズにおいて、変速制御部51から供給されるイナーシャトルクを目標エンジントルクとして設定する。
【0080】
変化抑制部59は、変速期間中において、スロットル開度が駆動状態と被駆動状態との境界値に向かって変化する場合に、エンジン制御部53に抑制指令を出力して、スロットル開度の時間変化率を抑制させる。例えば、変化抑制部59は、変速期間中にスロットル開度が境界値に所定値よりも近付いた場合に抑制指令を出力してもよいし、変速期間中にスロットル開度が境界値に向かって変化すると常にエンジン制御部53に抑制指令を出力してもよい。なお、本例では、スロットル開度の変化に基づいて抑制指令を出力しているが、これに限られず、アクセル開度の変化に基づいて抑制指令を出力してもよい。
【0081】
図10A及び図10Bは、第1の制御モード(パワーオンシフトアップ制御)時のスロットル開度の時間変化例を表す図である。これらの図において、実線はアクセル開度Aを表し、一点鎖線は第1例に係るスロットル開度S1を表し、二点鎖線は第2例に係るスロットル開度S2を表す。また、これらの図において、境界値よりもスロットル開度が大きい側は駆動状態を表し、境界値よりもスロットル開度が小さい側は被駆動状態を表す。図10Aは、変速期間中に運転者が一時的にアクセルを閉じるブリッピング操作を行った場合を表し、図10Bは、変速期間中に運転手が減速を意図してアクセルを閉じた場合を表す。
【0082】
スロットル開度S1,S2は、基本的にアクセル開度Aに追従するが、変速期間中にアクセル開度Aがパワーオン状態(駆動状態)から閉じられた場合に、アクセル開度Aに対する追従が遅れる。すなわち、スロットル開度S1,S2は、変速期間中に駆動状態から下降するときに、下降の時間変化率が抑制される。なお、本実施形態では、スロットル開度S1,S2は、変速期間中に駆動状態から更に上昇するときには、上昇の時間変化率は抑制されないが、これに限られず、上昇の時間変化率を抑制してもよい。
【0083】
図10Aに示されるように、変速期間中におけるスロットル開度S1は、境界値に対して駆動状態側に設定された所定値よりも大きい場合には、変速期間外と同様にアクセル開度Aに追従するが、所定値よりも小さい場合には、下降の時間変化率が低減される。換言すると、変速期間中におけるスロットル開度S1は、境界値に所定距離よりも近付いた場合に、下降の時間変化率が低減される。これに限られず、スロットル開度S2のように、変速期間中に駆動状態にあるときは常に下降の時間変化率が低減されてもよい。
【0084】
このように、変速期間中にパワーオン状態(駆動状態)からアクセルを一時的に閉じるブリッピング操作が行われても、スロットル開度S1,S2の下降の時間変化率が抑制されるので、スロットル開度S1,S2が境界値を跨いでショックが生じることが抑制される。
【0085】
なお、上記第2の制御モード(パワーオンシフトダウン制御)の場合には、パワーオン状態(駆動状態)からアクセルを一時的にさらに開けるブリッピング操作が行われると考えられる。しかし、このときのスロットル開度の変化は、境界値から離れる変化であるので、スロットル開度が境界値を跨いでショックが生じることはない。
【0086】
また、図10Bに示されるように、変速期間中に運転手が減速を意図してアクセルを閉じた場合には、アクセル開度Aが下降するのに伴って、スロットル開度S1,S2も下降する。このとき、スロットル開度S1,S2では、下降の時間変化率が抑制されるため、アクセル開度Aに対する追従が遅れる。ここで、第1例に係るスロットル開度S1では下降の時間変化率が抑制されるのが、所定値と境界値との間の範囲だけであるので、第1例に係るスロットル開度S1がアクセル開度Aに対応する値に到達するまでの時間は、第2例に係るスロットル開度S2よりも短い。
【0087】
このように、変速期間中にブリッピング操作ではないアクセル操作が行われた場合に、スロットル開度S1をアクセル開度Aに追従させるという点に鑑みると、第1例のように所定値と境界値との間の範囲だけで下降の時間変化率を抑制する方が、第2例よりも好ましい。
【0088】
図11A及び図11Bは、第4の制御モード(パワーオフシフトダウン制御)時のスロットル開度の時間変化例を表す図である。これらの図において、実線はアクセル開度Aを表し、一点鎖線は第1例に係るスロットル開度S1を表し、二点鎖線は第2例に係るスロットル開度S2を表す。また、これらの図において、境界値よりもスロットル開度が大きい側は駆動状態を表し、境界値よりもスロットル開度が小さい側は被駆動状態を表す。図11Aは、変速期間中に運転者が一時的にアクセルを開けるブリッピング操作を行った場合を表し、図11Bは、変速期間中に運転手が加速を意図してアクセルを開いた場合を表す。
【0089】
スロットル開度S1,S2は、基本的にアクセル開度Aに追従するが、変速期間中にアクセル開度Aがパワーオフ状態(被駆動状態)から開けられた場合に、アクセル開度Aに対する追従が遅れる。すなわち、スロットル開度S1,S2は、変速期間中に被駆動状態から上昇するときに、上昇の時間変化率が抑制される。なお、本実施形態では、スロットル開度S1,S2は、変速期間中に被駆動状態から更に下降するときには、下降の時間変化率は抑制されないが、これに限られず、下降の時間変化率を抑制してもよい。
【0090】
図11Aに示されるように、変速期間中におけるスロットル開度S1は、境界値に対して被駆動状態側に設定された所定値よりも小さい場合には、変速期間外と同様にアクセル開度Aに追従するが、所定値よりも大きい場合には、上昇の時間変化率が低減される。換言すると、変速期間中におけるスロットル開度S1は、境界値に所定距離よりも近付いた場合に、上昇の時間変化率が低減される。これに限られず、スロットル開度S2のように、変速期間中に被駆動状態にあるときは常に上昇の時間変化率が低減されてもよい。
【0091】
このように、変速期間中にパワーオフ状態(被駆動状態)からアクセルを一時的に開けるブリッピング操作が行われても、スロットル開度S1,S2の上昇の時間変化率が抑制されるので、スロットル開度S1,S2が境界値を跨いでショックが生じることが抑制される。
【0092】
なお、上記第3の制御モード(パワーオフシフトアップ制御)の場合には、パワーオフ状態(被駆動状態)からアクセルを一時的に更に閉じるブリッピング操作が行われるか、若しくはアクセルをそれ以上閉じることができないためにブリッピング操作が行われない、と考えられる。このため、スロットル開度が境界値を跨いでショックが生じることはない。
【0093】
また、図11Bに示されるように、変速期間中に運転手が加速を意図してアクセルを開けた場合には、アクセル開度Aが上昇するのに伴って、スロットル開度S1,S2も上昇する。このとき、スロットル開度S1,S2では、上昇の時間変化率が抑制されるため、アクセル開度Aに対する追従が遅れる。ここで、第1例に係るスロットル開度S1では上昇の時間変化率が抑制されるのが、所定値と境界値との間の範囲だけであるので、第1例に係るスロットル開度S1がアクセル開度Aに対応する値に到達するまでの時間は、第2例に係るスロットル開度S2よりも短い。
【0094】
このように、変速期間中にブリッピング操作ではないアクセル操作が行われた場合に、スロットル開度S1をアクセル開度Aに追従させるという点に鑑みると、第1例のように所定値と境界値との間の範囲だけで上昇の時間変化率を抑制する方が、第2例よりも好ましい。
【0095】
なお、当該態様に限られず、例えば図12に示されるように、変速制御部51は、変速期間中において目標エンジントルクが駆動状態と被駆動状態との境界値に向かって変化する場合に、目標値決定部55に抑制指令を出力して、目標エンジントルクの時間変化率を抑制させてもよい。これによっても、上記態様と同様の効果を得ることが可能である。
【0096】
図13は、制御装置10の動作例を表すフローチャートである。当該フローチャートが示す処理は、所定時間毎に実行される。
【0097】
S1において、目標値決定部55は、アクセルセンサ19gからアクセル開度を取得する。S2において、変化抑制部59は、スロットル開度の時間変化率を算出する。S3において、変速制御部51は、変速制御中であるか否かを判定し、変速制御中である場合には(S3:YES)、S4に進み、パワーオン状態であるか否かを判定する。パワーオン状態であるか否かは、例えば、図14に示されるマップに基づいて判定される。エンジン回転速度に応じてマップから求められる基準値よりもスロットル開度が大きい場合にはパワーオン状態であると判定され、基準値よりもスロットル開度が小さい場合にはパワーオン状態でない(すなわち、パワーオフ状態である)と判定される。こうしたマップは、例えば予め行われる実験の結果に基づいて作成することが可能である。
【0098】
パワーオン状態である場合には(S4:YES)、変化抑制部59は、S5に進み、アクセル開度が所定値を下回っているか否かを判定する。すなわち、変化抑制部59は、上記図10A及び図10Bに示されるようにアクセル開度Aが所定値を下回って境界値に近付いたか否かを判定する。アクセル開度が所定値を下回ったか否かは、例えば、図15に示されるマップに基づいて判定される。すなわち、エンジン回転速度に応じてマップから求められる所定値をアクセル開度が下回ったか否かが判定される。こうしたマップは、例えば予め行われる実験の結果に基づいて作成することが可能である。
【0099】
アクセル開度が所定値を下回っている場合には(S5:YES)、変化抑制部59は、S6に進み、スロットル開度が下降するときの時間変化率を低減する。また、変化抑制部59は、スロットル開度が下降するときの時間変化率のみならず、スロットル開度が上昇するときの時間変化率を低減してもよい。なお、本例では、アクセル開度が所定値を下回った場合にスロットル開度の時間変化率を低減しているが、これに限られず、スロットル開度が所定値を下回った場合にスロットル開度の時間変化率を低減してもよい。
【0100】
他方、パワーオフ状態である場合には(S4:NO)、変化抑制部59は、S7に進み、アクセル開度が所定値を上回っているか否かを判定する。すなわち、変化抑制部59は、上記図11A及び図11Bに示されるようにアクセル開度Aが所定値を上回って境界値に近付いたか否かを判定する。アクセル開度が所定値を上回ったか否かは、例えば、図16」に示されるマップに基づいて判定される。すなわち、エンジン回転速度に応じてマップから求められる所定値をアクセル開度が上回ったか否かが判定される。こうしたマップは、例えば予め行われる実験の結果に基づいて作成することが可能である。
【0101】
アクセル開度が所定値を上回っている場合には(S7:YES)、変化抑制部59は、S8に進み、スロットル開度が上昇するときの時間変化率を低減する。また、変化抑制部59は、スロットル開度が上昇するときの時間変化率のみならず、スロットル開度が下降するときの時間変化率を低減してもよい。なお、本例では、アクセル開度が所定値を上回った場合にスロットル開度の時間変化率を低減しているが、これに限られず、スロットル開度が所定値を上回った場合にスロットル開度の時間変化率を低減してもよい。
【0102】
S6又はS8の後、S9において開度決定部57は目標スロットル開度を決定し、S10においてエンジン制御部53は、目標スロットル開度に応じてスロットルアクチュエータ23を駆動する。また、S3において変速制御中でない場合や、S5においてアクセル開度が所定値以上である場合、S7においてアクセル開度が所定値以下である場合にも、S9及びS10が実行される。
【0103】
ところで、上記S4では、パワーオン状態であるかパワーオフ状態であるかが判定される。パワーオン状態での変速制御には、第1の制御モード(パワーオンシフトアップ制御)と、第2の制御モード(パワーオンシフトダウン制御)とがあるが、上述したように、第2の制御モードにおける運転者のブリッピング操作では、スロットル開度が境界値に近付かないと考えられる。このため、パワーオン状態においてスロットル開度の下降の時間変化率を抑制することで、第1の制御モードにおける運転者のブリッピング操作に起因するショックを抑制することが可能である。同様に、パワーオフ状態での変速制御には、第3の制御モード(パワーオフシフトアップ制御)と、第4の制御モード(パワーオフシフトダウン制御)とがあるが、上述したように、第3の制御モードにおける運転者のブリッピング操作では、スロットル開度が境界値に近付かないと考えられる。このため、パワーオフ状態においてスロットル開度の上昇の時間変化率を抑制することで、第4の制御モードにおける運転者のブリッピング操作に起因するショックを抑制することが可能である。
【0104】
なお、当該態様に限られず、例えば図17に示されるように、変速制御部51は、S41においてパワーオンシフトアップ制御であるか否かを判定してS5に進み、S42においてパワーオフシフトダウン制御であるか否か判定してS7に進んでもよい。これによっても、上記態様と同様の効果を得ることが可能である。
【0105】
以下、上記図6Aに示される第1の制御モード(パワーオンシフトアップ制御)時にアクセルを一時的に閉じるブリッピング操作が行われた場合の詳細について説明する。図18は、上記変化抑制部59による時間変化率の抑制が行われない参考例のタイミングチャートである。変速期間中にブリッピング操作によりアクセル開度Aが一時的に下降すると、これに伴って、目標エンジントルクTe及び次クラッチCnの目標トルク容量Tcnも一時的に下降する。ここで、イナーシャフェーズ中にアクセル開度Aが下降した場合、イナーシャフェーズでは目標エンジントルクTeをアクセル開度Aに基づいて定まる値よりも下げるので、目標エンジントルクTeが負の値になりやすく、そのためにショックが生じやすい。すなわち、イナーシャフェーズが行われるツインクラッチ式の自動二輪車1の変速制御では、運転者のブリッピング操作に起因するショックが生じやすい。これは、第4の制御モード(パワーオフシフトダウン制御)時にアクセルを一時的に開けるブリッピング操作が行われる場合も同様である。
【0106】
図19は、上記変化抑制部59による時間変化率の抑制が行われる実施例のタイミングチャートである。本実施例では、変速期間中にブリッピング操作によりアクセル開度Aが一時的に下降するとき、目標エンジントルクTeの下降が抑制される。このため、イナーシャフェーズ中にアクセル開度Aが下降しても、目標エンジントルクTeが負の値になり難く、そのためショックが生じ難い。
【0107】
以上、本発明の実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、種々の変形実施が当業者にとって可能であるのはもちろんである。
【符号の説明】
【0108】
1 自動二輪車、2 前輪、1h,5i,3h,4h,6i,2h 固定ギア、5h,3i,4i,6h 可動ギア、10 制御装置、11 エンジンユニット、20 エンジン、21 クランクシャフト、30A 第1変速機構、30B 第2変速機構、31 入力軸、32 出力軸、39 シフトアクチュエータ、40A 第1クラッチ、40B 第2クラッチ、41 駆動部材、42 従動部材、49A,49B クラッチアクチュエータ、51 変速制御部、53 エンジン制御部、55 目標値決定部、57 開度決定部、59 変化抑制部、Cn 次クラッチ、Cp 前クラッチ、Gn1 可動ギア、Gn2 固定ギア、Gp1 可動ギア、Gp2 固定ギア、Tn 次変速機構、Tp 前変速機構、Se エンジン回転速度、Tcn 次クラッチの目標トルク容量、Tcp 前クラッチの目標トルク容量、Te 目標エンジントルク。
【特許請求の範囲】
【請求項1】
エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられ、
前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する制御装置であって、
前記アクセルの操作量に基づいて前記出力トルクの目標値を決定する目標値決定部と、
前記エンジンの回転速度の下降を伴う前記変速期間中において、前記出力トルクの目標値が、前記伝達経路から前記エンジンに入力される負荷トルクよりも大きい値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記出力トルクの目標値の時間変化率を低減する変化抑制部と、
を備えることを特徴とする車両の制御装置。
【請求項2】
エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられ、
前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する制御装置であって、
前記アクセルの操作量に基づいて前記出力トルクの目標値を決定する目標値決定部と、
前記エンジンの回転速度の上昇を伴う前記変速期間中において、前記出力トルクの目標値が、前記伝達経路から前記エンジンに入力される負荷トルクよりも小さい値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記出力トルクの目標値の時間変化率を低減する変化抑制部と、
を備えることを特徴とする車両の制御装置。
【請求項3】
前記変化抑制部は、前記出力トルクの目標値が、前記境界値に所定値よりも近付いた場合に、前記出力トルクの目標値の時間変化率を低減する、
請求項1または2に記載の車両の制御装置。
【請求項4】
エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられ、
前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する制御装置であって、
前記アクセルの操作量に基づいて前記スロットルバルブの開度を決定する開度決定部と、
前記エンジンの回転速度の下降を伴う前記変速期間中において、前記スロットルバルブの開度が、前記伝達経路から前記エンジンに入力される負荷トルクよりも前記出力トルクが大きくなる値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記スロットルバルブの開度の時間変化率を低減する変化抑制部と、
を備えることを特徴とする車両の制御装置。
【請求項5】
エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられ、
前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する制御装置であって、
前記アクセルの操作量に基づいて前記スロットルバルブの開度を決定する開度決定部と、
前記エンジンの回転速度の上昇を伴う前記変速期間中において、前記スロットルバルブの開度が、前記伝達経路から前記エンジンに入力される負荷トルクよりも前記出力トルクが小さくなる値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記スロットルバルブの開度の時間変化率を低減する変化抑制部と、
を備えることを特徴とする車両の制御装置。
【請求項6】
前記変化抑制部は、前記スロットルバルブの開度が、前記境界値に所定値よりも近付いた場合に、前記スロットルバルブの開度の時間変化率を低減する、
請求項4または5に記載の車両の制御装置。
【請求項7】
前記変化抑制部は、前記アクセルの操作量が、前記境界値に所定値よりも近付いた場合に、前記スロットルバルブの開度の時間変化率を低減する、
請求項4または5に記載の車両の制御装置。
【請求項8】
前記スロットルバルブの開度を調整することで前記エンジンの回転速度を変化させるエンジン制御部をさらに備える、
請求項1ないし7の何れかに記載の車両の制御装置。
【請求項9】
請求項1ないし8の何れかに記載の制御装置を備える車両。
【請求項10】
請求項1ないし8の何れかに記載の制御装置を備える原動機。
【請求項1】
エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられ、
前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する制御装置であって、
前記アクセルの操作量に基づいて前記出力トルクの目標値を決定する目標値決定部と、
前記エンジンの回転速度の下降を伴う前記変速期間中において、前記出力トルクの目標値が、前記伝達経路から前記エンジンに入力される負荷トルクよりも大きい値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記出力トルクの目標値の時間変化率を低減する変化抑制部と、
を備えることを特徴とする車両の制御装置。
【請求項2】
エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられ、
前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する制御装置であって、
前記アクセルの操作量に基づいて前記出力トルクの目標値を決定する目標値決定部と、
前記エンジンの回転速度の上昇を伴う前記変速期間中において、前記出力トルクの目標値が、前記伝達経路から前記エンジンに入力される負荷トルクよりも小さい値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記出力トルクの目標値の時間変化率を低減する変化抑制部と、
を備えることを特徴とする車両の制御装置。
【請求項3】
前記変化抑制部は、前記出力トルクの目標値が、前記境界値に所定値よりも近付いた場合に、前記出力トルクの目標値の時間変化率を低減する、
請求項1または2に記載の車両の制御装置。
【請求項4】
エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられ、
前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する制御装置であって、
前記アクセルの操作量に基づいて前記スロットルバルブの開度を決定する開度決定部と、
前記エンジンの回転速度の下降を伴う前記変速期間中において、前記スロットルバルブの開度が、前記伝達経路から前記エンジンに入力される負荷トルクよりも前記出力トルクが大きくなる値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記スロットルバルブの開度の時間変化率を低減する変化抑制部と、
を備えることを特徴とする車両の制御装置。
【請求項5】
エンジンと、前記エンジンの下流に配置され、前記エンジンから出力される出力トルクが個別に入力される2つのクラッチと、前記各々のクラッチのトルク容量を変化させる2つのアクチュエータと、前記各々のクラッチの下流に配置され、共通の出力軸を有するドグクラッチ式の2つの変速機構と、運転者により操作されるアクセルと、前記エンジンへの気体の流入量を調整するスロットルバルブと、を備える車両に設けられ、
前記変速期間中に、前記出力トルクの伝達経路を一方のクラッチ及び変速機構から他方のクラッチ及び変速機構に切り替える切替制御と、前記出力トルクと前記トルク容量とに差を設けることで前記エンジンの回転速度を変化させる回転制御と、を実行する制御装置であって、
前記アクセルの操作量に基づいて前記スロットルバルブの開度を決定する開度決定部と、
前記エンジンの回転速度の上昇を伴う前記変速期間中において、前記スロットルバルブの開度が、前記伝達経路から前記エンジンに入力される負荷トルクよりも前記出力トルクが小さくなる値から、前記出力トルクと前記負荷トルクとが等しくなる境界値に向かって変化する場合に、前記スロットルバルブの開度の時間変化率を低減する変化抑制部と、
を備えることを特徴とする車両の制御装置。
【請求項6】
前記変化抑制部は、前記スロットルバルブの開度が、前記境界値に所定値よりも近付いた場合に、前記スロットルバルブの開度の時間変化率を低減する、
請求項4または5に記載の車両の制御装置。
【請求項7】
前記変化抑制部は、前記アクセルの操作量が、前記境界値に所定値よりも近付いた場合に、前記スロットルバルブの開度の時間変化率を低減する、
請求項4または5に記載の車両の制御装置。
【請求項8】
前記スロットルバルブの開度を調整することで前記エンジンの回転速度を変化させるエンジン制御部をさらに備える、
請求項1ないし7の何れかに記載の車両の制御装置。
【請求項9】
請求項1ないし8の何れかに記載の制御装置を備える車両。
【請求項10】
請求項1ないし8の何れかに記載の制御装置を備える原動機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図6C】

【図6D】
【図7】
【図8】
【図9】
【図10A】
【図10B】
【図11A】
【図11B】
【図12】
【図13】
【図14】

【図15】

【図16】

【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図6D】
【図7】
【図8】
【図9】
【図10A】
【図10B】
【図11A】
【図11B】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−76324(P2013−76324A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−214863(P2011−214863)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
【Fターム(参考)】
[ Back to top ]