
車両の制御装置および車両の制御方法
【課題】車両状態が変化しても、登坂路でのニュートラル制御の禁止と許可を適切に制御することができる車両の制御装置および車両の制御方法を提供する。
【解決手段】ニュートラル制御を実行する車両の制御装置は、路面勾配を検出するためのGセンサ442と、Gセンサ442の出力がニュートラル制御実行領域に入るという条件が成立する場合にニュートラル制御を有効とする制御を行なう制御部1000とを備える。制御部1000は、N制御開始条件が成立した状態から不成立の状態に変化する車両状態の遷移に応じて入力クラッチC1が解放状態から係合される状態に変化した際のGセンサ442の出力に生じる変動の大きさに基づいて、N制御開始条件の成立し易さを変更する。
【解決手段】ニュートラル制御を実行する車両の制御装置は、路面勾配を検出するためのGセンサ442と、Gセンサ442の出力がニュートラル制御実行領域に入るという条件が成立する場合にニュートラル制御を有効とする制御を行なう制御部1000とを備える。制御部1000は、N制御開始条件が成立した状態から不成立の状態に変化する車両状態の遷移に応じて入力クラッチC1が解放状態から係合される状態に変化した際のGセンサ442の出力に生じる変動の大きさに基づいて、N制御開始条件の成立し易さを変更する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、車両の制御装置および車両の制御方法に関し、特に駆動源からの駆動力を自動変速機に伝達する入力クラッチに対してニュートラル制御を行なう車両の制御装置および車両の制御方法に関する。
【背景技術】
【0002】
車両に搭載される自動変速機は、エンジンとトルクコンバータ等を介して繋がるとともに複数の動力伝達経路を有してなる変速機構を有して構成され、例えば、アクセル開度および車速に基づいて自動的に変速比(走行速度段)の切換えを行なうように構成される。
【0003】
一般的に、自動変速機を有した車両には運転者により操作されるシフトレバーが設けられ、シフトレバー操作に基づいて変速ポジション(例えば、後進走行ポジション、ニュートラルポジション、前進走行ポジション)が設定されている。
【0004】
このような自動変速機を有した車両において、前進走行ポジションが設定されて車両が停止している状態では、アイドリング回転するエンジンからの駆動力がトルクコンバータを介して変速機に伝達され、これが車輪に伝達されるため、いわゆるクリープ現象が発生する。
【0005】
クリープ現象は、登坂路での停車からの発進をスムーズに行なわせることができるなど、所定条件下では非常に有用なのであるが、車両を停止保持したいときには不要な現象であり、車両のブレーキを作動させてクリープ力を抑えるようになっている。すなわち、エンジンからのクリープ力をブレーキにより抑えるようになっており、その分エンジンの燃費が低下するという問題がある。
【0006】
このようなことから、前進走行ポジションにおいて、ブレーキペダルが踏み込まれてブレーキが作動されるとともにアクセルがほぼ全閉となって車両が停止している状態では、前進走行ポジションのまま変速機をニュートラルに近いニュートラル状態として、燃費の向上を図るという制御(以下ニュートラル制御、またはN制御と称する)が提案されている。
【0007】
特開2002−71004号公報(特許文献1)は、所定勾配以上の上り坂ではニュートラル制御を禁止する車両の制御装置を開示する。
【特許文献1】特開2002−71004号公報
【特許文献2】特開2004−286146号公報
【特許文献3】特開2001−336618号公報
【特許文献4】特開2006−307866号公報
【特許文献5】特開2005−194934号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
上記の特開2002−71004号公報に開示された技術では、路面の勾配を勾配検出センサで検出しているが、勾配検出センサの製造バラツキによっては、本来であればニュートラル制御を実施しない路面勾配に停車した場合でもニュートラル制御が実施され、ブレーキの作動を解除する発進時に一瞬坂道を後退して下がってしまうことが考えられる。
【0009】
このバラツキを低減させるため、車両を工場から出荷する前にセンサのゼロ点学習をおこなえば初期のバラツキは低減させることができるが、勾配検出センサや車両のサスペンション等の経時劣化によるバラツキや、車両の使用状況による変化が存在する。
【0010】
たとえば、フロントのサスペンションにへたりが生じ、車両が前下がりになった場合や、平坦路でも下り坂であると判定されてしまう。この状態では、上り坂に停止しても平坦路であると判定されニュートラル制御が実行されてしまう。また、後部座席に人が座った場合や重い荷物をトランクルームに載せた場合には、車両の後ろが下がり、勾配検出センサの検出値にずれが生じる。
【0011】
また、勾配検出センサ自体が劣化した場合も同様である。例えば、センサ出力に勾配+3°相当の出力のずれが生じているときには、ニュートラル制御の実施を許可する最大勾配よりも+3°の上り坂でもニュートラル制御が実行されてしまう。
【0012】
この発明の目的は、車両状態が変化しても、登坂路においてニュートラル制御の禁止と許可を適切に制御することができる車両の制御装置および車両の制御方法を提供することである。
【課題を解決するための手段】
【0013】
この発明は、要約すると、前進走行ポジション、アクセル未操作状態、ブレーキ操作状態および車速が所定値以下であるという条件が成立した場合に、駆動源からの駆動力を自動変速機に伝達する入力クラッチを解放させるニュートラル制御を実行する車両の制御装置であって、路面勾配を検出するためのセンサと、センサの出力がニュートラル制御実行領域に入るという条件が成立する場合にニュートラル制御を有効とする制御を行なう制御部とを備える。制御部は、条件が成立した状態から不成立の状態に変化する車両状態の遷移に応じて入力クラッチが解放状態から係合される状態に変化した際のセンサの出力に生じる変動の大きさに基づいて、条件の成立し易さを変更する。
【0014】
好ましくは、制御部は、条件の成立し易さを変更するために、センサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0015】
好ましくは、センサは、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、ニュートラル制御が禁止されるように定められる。制御部は、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅が標準変動量よりも大きい場合にはニュートラル制御が禁止され易くなる方向にセンサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0016】
より好ましくは、標準変動量は、複数の路面勾配に対応してそれぞれ複数の値が予め定められている。
【0017】
より好ましくは、加速度センサによって検出された加速度の減少幅とは、ニュートラル制御を実行している状態のセンサの出力値と、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時から所定時間後におけるセンサの出力値との間の差分値である。
【0018】
より好ましくは、加速度センサによって検出された加速度の減少幅とは、ニュートラル制御を実行している状態のセンサの出力値と、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時から所定時間後までの間におけるセンサの出力値の最小値との間の差分値である。
【0019】
好ましくは、センサは、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、ニュートラル制御が禁止されるように定められる。制御部は、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅が、加速度センサの出力値に基づいて求められる路面勾配に対応する減少幅よりも大きい場合には、ニュートラル制御が禁止され易くなる方向にセンサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0020】
好ましくは、センサは、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、ニュートラル制御が禁止されるように定められる。制御部は、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅が標準変動量よりも小さい場合にはニュートラル制御が禁止され難くなる方向にセンサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0021】
好ましくは、センサは、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、ニュートラル制御が禁止されるように定められる。制御部は、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅が、加速度センサの出力値に基づいて求められる路面勾配に対応する減少幅よりも小さい場合には、ニュートラル制御が禁止され難くなる方向にセンサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0022】
この発明は、他の局面においては、前進走行ポジション、アクセル未操作状態、ブレーキ操作状態および車速が所定値以下であるという条件が成立した場合に、駆動源からの駆動力を自動変速機に伝達する入力クラッチを解放させるニュートラル制御を実行する車両の制御方法であって、その車両は、路面勾配を検出するためのセンサと、センサの出力がニュートラル制御実行領域に入るという条件が成立する場合にニュートラル制御を有効とする制御を行なう制御部とを含む。制御方法は、条件が成立した状態から不成立の状態に変化する車両状態の遷移を検出するステップと、車両状態の遷移に応じて入力クラッチが解放状態から係合される状態に変化した際のセンサの出力に生じる変動の大きさを検出するステップと、変動の大きさに基づいて、条件の成立し易さを変更するステップとを備える。
【発明の効果】
【0023】
本発明によれば、車両状態が変化しても、登坂路においてニュートラル制御の禁止と許可を適切に制御することができる。
【発明を実施するための最良の形態】
【0024】
以下、本発明の実施の形態について図面を参照しつつ詳細に説明する。なお、以下の説明では、同一の部品には同一の符号を付し、それらについての詳細な説明は繰返さない。
【0025】
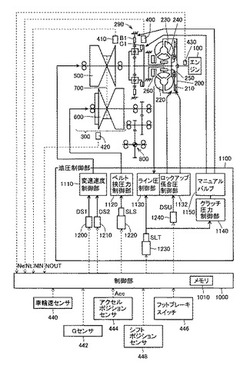
図1は、本実施の形態に係る車両のパワートレーンの構成を示す図である。
図1を参照して、この車両のパワートレーンは、エンジン100と、トルクコンバータ200と、前後進切換装置290と、ベルト式無段変速機構300と、デファレンシャルギヤ800と、制御部1000と、油圧制御部1100とを含む。
【0026】
なお、無段変速機は、トルクコンバータ200と、前後進切換装置290と、ベルト式無段変速機構300と、油圧制御部1100とを含む。
【0027】
エンジン100の出力軸は、トルクコンバータ200の入力軸に接続される。エンジン100とトルクコンバータ200とは回転軸により連結されている。したがって、エンジン回転数センサ430により検出されるエンジン100の出力軸回転速度Ne(エンジン回転速度Ne)とトルクコンバータ200の入力軸回転速度(ポンプ回転速度)とは同じである。
【0028】
トルクコンバータ200は、入力軸と出力軸とを直結状態にするロックアップクラッチ210と、入力軸側のポンプ羽根車220と、出力軸側のタービン羽根車230と、ワンウェイクラッチ250を有しトルクを増幅するステータ240とを含む。トルクコンバータ200とベルト式無段変速機構300とは、回転軸により接続される。トルクコンバータ200の出力軸回転速度Nt(タービン回転速度Nt)は、タービン回転数センサ400により検出される。
【0029】
トルクコンバータ200とベルト式無段変速機構300との間には、オイルポンプ260が設けられる。オイルポンプ260は、たとえば、ギヤポンプであって、入力軸側のポンプ羽根車220が回転すると作動する。オイルポンプ260は、油圧制御部1100の各種ソレノイドに油圧を供給する。
【0030】
ベルト式無段変速機構300は、前後進切換装置290を介在させてトルクコンバータ200に接続される。ベルト式無段変速機構300は、入力側のプライマリプーリ500と、出力側のセカンダリプーリ600と、プライマリプーリ500とセカンダリプーリ600とに巻き掛けられた金属製のベルト700とを含む。
【0031】
プライマリプーリ500は、プライマリシャフトに固定された固定シーブおよびプライマリシャフトに摺動のみ自在に支持されている可動シーブとを含む。セカンダリプーリ600は、セカンダリシャフトに固定されている固定シーブおよびセカンダリシャフトに摺動のみ自在に支持されている可動シーブとを含む。
【0032】
プライマリプーリ500およびセカンダリプーリ600の油圧アクチュエータ(いずれも図示せず)には、それぞれ作動油が給排されている。変速は、各プーリ500,600の固定シーブと可動シーブとの間の溝幅を連続的に変化させることにより、ベルトの巻き掛け半径が大小に変化して行なわれる。
【0033】
油圧制御部1100は、プライマリプーリ500の回転速度を目標回転速度に一致させる変速比となるように、プライマリプーリ500の油圧アクチュエータに供給される油圧を制御する。さらに、油圧制御部1100は、セカンダリプーリ600の可動シーブを固定シーブ側に押圧してベルトを挟みつけてトルクを伝達するのに必要な張力が得られるようにセカンダリプーリ600の油圧アクチュエータに供給される油圧を制御する。
【0034】
ベルト式無段変速機構300のプライマリプーリ500の回転速度NINは、プライマリプーリ回転数センサ410により検出され、セカンダリプーリ600の回転速度NOUTは、セカンダリプーリ回転数センサ420により検出される。
【0035】
これら回転数センサは、プライマリプーリ500やセカンダリプーリ600の回転軸やこれに繋がるドライブシャフトに取付けられた回転検出用ギヤの歯に対向して設けられている。これらの回転数センサは、ベルト式無段変速機構300の、入力軸であるプライマリプーリ500や出力軸であるセカンダリプーリ600の僅かな回転の検出も可能なセンサであり、たとえば、一般的に半導体式センサと称される磁気抵抗素子を使用したセンサである。
【0036】
前後進切換装置290は、ダブルピニオンプラネタリギヤ、リバース(後進用)ブレーキB1および入力クラッチC1を有している。プラネタリギヤは、そのサンギヤが入力軸に連結されており、第1および第2のピニオンを支持するキャリヤがプライマリ側固定シーブに連結されており、そしてリングギヤが後進用摩擦係合要素となるリバースブレーキB1に連結されており、またキャリヤとリングギヤとの間に入力クラッチC1が介在している。この入力クラッチC1は、前進クラッチやフォワードクラッチとも呼ばれ、シフトポジションセンサ448が検出するシフトレバーのポジションが、パーキング(P)ポジション、リバース(R)ポジション、ニュートラル(N)ポジション以外のポジションであって車両が前進する前進ポジションにおいて係合状態で使用される。
【0037】
これらのパワートレーンを制御する制御部1000および油圧制御部1100について説明する。制御部1000は、ECU(電子制御ユニット)によって実現される。なお制御部1000は、1つのECUによって実現されるものであってもよいし、複数のECUによって実現されるものであってもよい。
【0038】
制御部1000には、タービン回転数センサ400からタービン回転速度Ntを表わす信号が、プライマリプーリ回転数センサ410からプライマリプーリ回転速度NINを表わす信号が、セカンダリプーリ回転数センサ420からセカンダリプーリ回転速度NOUTを表わす信号が、入力される。
【0039】
油圧制御部1100は、変速速度制御部1110と、ベルト挟圧力制御部1120と、ライン圧制御部1130と、ロックアップ係合圧制御部1132と、クラッチ圧力制御部1140と、マニュアルバルブ1150とを含む。制御部1000は、油圧制御部1100の変速制御用デューティソレノイド1200と、変速制御用デューティソレノイド1210と、ベルト挟圧力制御用リニアソレノイド1220と、ライン圧制御用リニアソレノイド1230と、ロックアップ係合圧制御用デューティソレノイド1240に対して制御信号を出力する。
【0040】
変速速度制御部1110は、変速制御用デューティソレノイド1200の出力油圧に応じて、プライマリプーリ500の油圧アクチュエータへの作動油の流入量を制御することにより増速側の変速速度を制御する。さらに、変速速度制御部1110は、変速制御用デューティソレノイド1210の出力油圧に応じて、プライマリプーリ500の油圧アクチュエータからの作動油の流出量を制御して減速側の変速速度を制御する。制御部1000は、車輪速やアクセル開度に応じて、変速制御用デューティソレノイド1200,1210を制御する。変速速度制御部1110によりプライマリプーリ500の油圧アクチュエータに対する作動油の流入量と流出量とを制御することにより変速制御が行なわれる。
【0041】
ベルト挟圧力制御部1120は、プライマリプーリ500の入力軸トルクと変速比とに応じて変化するベルト挟圧力制御用リニアソレノイド1220の出力油圧により、セカンダリプーリ600の油圧アクチュエータに供給される油圧を制御して、ベルト挟圧力を制御する。入力軸トルクは、たとえば、エンジン100の回転速度、吸入空気量等に基づくエンジン100の出力トルクとトルクコンバータ200におけるトルク比とから推定されてもよいし、直接的に検出されてもよい。
【0042】
ライン圧制御部1130は、ライン圧制御用リニアソレノイド1230の出力油圧に応じてライン圧を制御する。プライマリプーリ500のアクチュエータの油圧は、プライマリプーリ500の油圧アクチュエータへの作動油の流入量と流出量とに基づいて推定される。ここで、ライン圧とは、オイルポンプ260により供給された油圧がレギュレータバルブ(図示せず)により調圧された油圧である。
【0043】
ロックアップ係合圧制御部1132は、ロックアップ係合圧制御用デューティソレノイド1240の出力油圧によりロックアップクラッチ210の係合と解放の切換え、および、ロックアップクラッチ210の係合圧の漸増および漸減を制御する。
【0044】
マニュアルバルブ1150は、運転者のシフトレバーの操作に連動して作動して、油路を切換える。クラッチ圧力制御部1140は、入力クラッチC1またはリバースブレーキB1の係合時に、ライン圧制御用リニアソレノイド1230によりマニュアルバルブ1150を経由して供給される油圧をマニュアルバルブに供給する。
【0045】
制御部1000には、さらにアクセルポジションセンサ444から運転者により踏まれているアクセルの開度を表わす信号Acc、スロットルポジションセンサ(図示せず)から、電磁スロットルの開度を表わす信号、エンジン回転数センサ430から、エンジン100の回転速度(Ne)を表わす信号、シフトポジションセンサ448から前進走行ポジションか否かを示す信号、フットブレーキスイッチ446からフットブレーキが操作状態であるか否かを示す信号が、それぞれ入力される。
【0046】
車輪速センサ440は、車輪(図示せず)の回転速度を検出する。車輪速センサ440は、検出された車輪の回転速度を示す車輪速信号を制御部1000に送信する。なお、車速が検出できれば、特に車輪の回転速度を検出することに限定されるものではなく、たとえば、セカンダリプーリ回転速度と無段変速機から駆動輪までの減速比とに基づいて車速を演算するようにしてもよい。
【0047】
Gセンサ442は、車両に取付けられた加速度センサである。たとえば、上り坂などを検出してニュートラル制御を上り坂では行なわないような制御に用いることができる。
【0048】
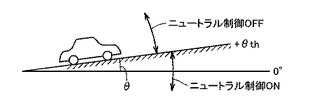
図2は、ニュートラル制御を上り坂で禁止する説明をするための図である。
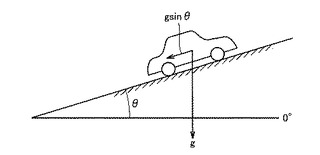
図3は、勾配の検出の原理を説明するための図である。
【0049】
図2、図3を参照して、路面の勾配をθとする。この勾配θは、たとえば車両の前後方向の加速度を検出する加速度センサを用いて検出することができる。停車状態では、重力加速度をgで示すと、上り坂に停車した場合、gsinθの後ろ向きの加速度成分が加速度センサに検出される。したがって、車速がゼロで後ろ向きの加速度成分が検出されれば車両は上り坂に停車中であることが分かる。
【0050】
なお、走行中の路面の勾配判定は、車輪速センサ440の出力から検出できる実際の加速度とGセンサ442で検出される前後方向の加速度との差の大きさに基づいて求めることができるが、ニュートラル制御は停車時に実行される制御であるので、ここでは詳細には説明しない。
【0051】
図2に示すように、しきい値をθthとすると坂の勾配θ>θthであればニュートラル制御を行なうと発進時に後退する恐れがあるので、停車してもニュートラル制御を禁止する。θ<θthでは、停車時にはニュートラル制御を実行し燃費を向上させる。θ<θthの領域をニュートラル制御実行領域とする。
【0052】
たとえば、θthを5°とすると、加速度センサの経時変化や車両の使用状況(たとえば乗員が後部座席に座ったなど)で勾配の検出値に3°のずれが生じてしまうと、ある車両ではニュートラル制御が禁止される上り坂でも、他の車両ではニュートラル制御が実行されてしまい、発進時に一瞬後退するような事態が生じる。
【0053】
したがって、本実施の形態においては、加速度センサの出力をそのときの車両の状態に合わせて補正し、ニュートラル制御の禁止および許可が個々の車両でばらつかないようにしている。
【0054】
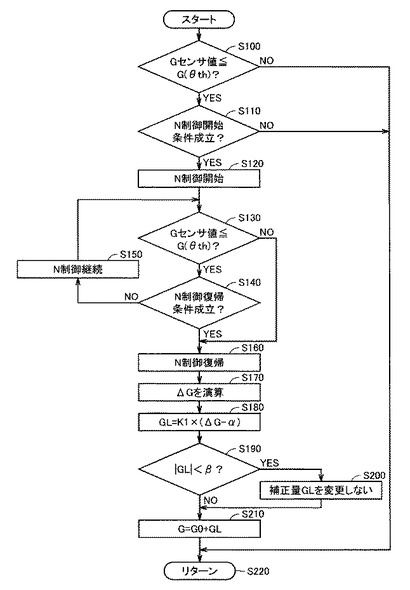
図4は、本実施の形態に係る制御部1000で実行されるニュートラル制御処理のプログラムの制御構造について示したフローチャートである。このプログラムの処理は、所定のメインルーチンから一定時間ごとまたは所定の条件が成立するごとに呼び出されて実行される。
【0055】
図1、図4を参照して、まず、ステップS100において、制御部1000は、Gセンサ442から入力されたGセンサの値が、予め定められたしきい値G(θth)以下であるか否かを判断する。好ましくは、Gセンサの値の急な変化を取り除く処理を行なってからこの判断を行なっても良い。予め定められたしきい値G(θth)とは、ニュートラル制御を実行するために車両が停車している場所が上り坂でないことを示すしきい値である。
【0056】
ステップS100においてGセンサの値がしきい値G(θth)以下であった場合には(ステップS100にてYES)、処理はステップS110へ移される。ステップS100においてGセンサの値がしきい値G(θth)以下でない場合には(ステップS100にてNO)、ステップS220に処理が進み、制御はメインルーチンに移される。
【0057】
ステップS110にて、制御部1000は、ニュートラル制御の開始条件が成立したか否かを判断する。この判断は、たとえば運転者によりアクセルペダルが踏まれていないこと、運転者によりブレーキが踏まれていること、前進走行(D)ポジションであること、車両が停止していることなどに基づいて行なわれる。さらに具体的には、この判断は、車輪速センサ440の出力に基づいて検出される車速、制御部1000に入力されるアクセルポジションセンサ444の出力するアクセル開度Acc、シフトポジションセンサ448によって検出されるシフトポジション、フットブレーキスイッチから制御部1000に入力される信号などに基づいて行なわれる。
【0058】
ステップS110で適用されるニュートラル制御の開始条件は、アクセルペダルが踏まれていないこと、運転者によりブレーキが踏まれていること、前進走行(D)ポジションであること、車両が停止していることが同時に成立しているという条件を少なくとも含むが、他の条件を追加的に含めても良い。
【0059】
ステップS110においてニュートラル制御の開始条件が成立している場合には(ステップS110にてYES)ステップS120に処理が進み、成立していない場合には(ステップS110にてNO)ステップS220に処理が進み制御はメインルーチンに移される。
【0060】
ステップS120にて、制御部1000は、ニュートラル制御(N制御)を開始させる。このとき、制御部1000は、リニアソレノイド1230に指令値を出力し、クラッチ圧力制御部1140を介して入力クラッチC1を解放するように制御する。
【0061】
ステップS130にて、制御部1000は、Gセンサ442から入力されるGセンサの値がしきい値G(θth)以下であるか否かを判断する。この処理は、前述のステップS100における処理と同じである。Gセンサの値が予め定められたしきい値G(θth)以下であると(ステップS130にてYES)、処理はステップS140へ移される。Gセンサの値が予め定められたしきい値G(θth)以下でないと(ステップS130にてNO)、処理はステップS160へ移される。
【0062】
ステップS140にて、制御部1000は、ニュートラル制御復帰条件が成立したか否かを判断する。この判断は、たとえば、運転者によりアクセルペダルが踏まれたことや、運転者がブレーキペダルを放したことや、ドライブポジションを変更したことなどに基づいて行なわれる。ニュートラル制御の復帰条件が成立した場合には(ステップS140にてYES)、処理はステップS160へ移される。ニュートラル制御の復帰条件が成立しない場合には(ステップS140にてNO)は、処理はステップS150へ移される。
【0063】
ステップS150にて、制御部1000は、ニュートラル制御を継続する。その後予め定められたサンプリングタイム毎にステップS130、S140の処理が実行され、Gセンサから入力されるGセンサの値が予め定められたしきい値以下であるか否かおよびニュートラル制御の復帰条件が成立するか否かが判断される。
【0064】
ステップS160では、制御部1000は、ニュートラル制御からの復帰処理を実行する。このとき、制御部1000は、リニアソレノイド1230に指令信号を出力し、クラッチ圧力制御部1140を介して入力クラッチC1を係合させる。
【0065】
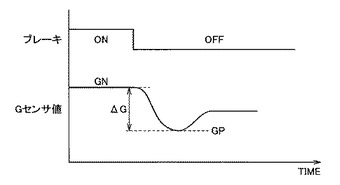
図5は、ニュートラル制御からの復帰処理を実行した場合の車両の動作について説明するための動作波形図である。
【0066】
図4、図5を参照して、時刻t1までは、ニュートラル制御が実行され、入力クラッチC1は非係合または半係合状態となっている。ブレーキペダルが放されたことに応じてフットブレーキスイッチからのブレーキ信号がON状態からOFF状態に変化する。するとステップS140においてニュートラル復帰条件が成立するので、時刻t1において、ニュートラル制御からの復帰処理が開始される。まず、クラッチ圧指示値PがPNまで増加することによって、クラッチC1の係合が強められる。
【0067】
すると、エンジン回転速度Neとタービン回転速度Ntの差であるスリップ量ΔNが増大し始める。スリップ量ΔNの増加が検出されると、時刻t3〜t4の間において制御部1000は、次第にクラッチ圧指示値Pを増大させる。そして、時刻t4以降は、タービン回転速度Ntがゼロとなり、停車中において通常のクリープ力が図1のトルクコンバータ200で発生するようになり、ニュートラル制御からの復帰が完了する。
【0068】
ここで、時刻t1でブレーキがOFFとなると、ニュートラル制御によってクリープ力が低下しているので、上り坂(登坂路)ではずり下がりが目立つ場合がある。したがって、Gセンサ442の出力をモニタしておくことでずり下がりが目立つ場合には、次回からは同じような勾配ではニュートラル制御を行なわないように、ニュートラル制御を禁止するほうが良い。
【0069】
禁止する方法としては、Gセンサ442の補正を行なう方法とニュートラル制御の実行と禁止の境界の勾配(しきい値G(θth))を変更する方法とが考えられる。ここでは一例としてGセンサ442の補正を行なう方法について説明する。
【0070】
制御部1000は、図4のステップS160のニュートラル制御復帰時において、Gセンサ442の出力値のモニタを行なっており、ステップS170においてその変動量ΔGを演算する。たとえば、図5に示すように、ニュートラル制御実行中のGセンサ値GNとニュートラル制御復帰条件成立から時間TG後の時刻t2におけるGセンサ値GDとの差(GN−GD)をΔGとして演算する。
【0071】
そしてステップS180において制御部1000は、変動量ΔGおよび標準変動量αに基づいて、Gセンサ値の補正値GLを算出する。
【0072】
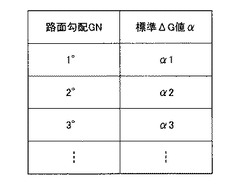
図6は、標準変動量αについて説明するための図である。
図6に示すように、路面勾配GNごとに対応する標準的な変動量ΔGが予め実験的に求められて、標準変動量αとして図1の制御部1000内のメモリ1010に記憶されている。図6では、路面勾配1°,2°,3°…に対応させてそれぞれα1,α2,α3が標準変動量として記憶されている。
【0073】
再び図4を参照して、ステップS180では、Gセンサの出力値の補正量GLが新たに次式(1)に基づいて算出される。なお、式(1)においてK1はゲインを示す正の定数を表わし、ΔGはセンサで検出された変動量を表わし、αは標準変動量を表わす。
GL=K1×(ΔG−α) …(1)
続いて、ステップS190において、補正量GLがノイズレベル程度であれば、正負方向に補正が繰返されるハンチングを防ぐために補正量を変更しないように処理が行なわれる。すなわち、ステップS190では、ノイズレベルに対応するしきい値βと、ステップS190で算出された補正量GLの大きさ|GL|が比較される。ステップS200において|GL|<βが成立する場合には、ステップS200に処理が進み、Gセンサの出力値の補正量GLは変更されない。すなわち、ステップS180で今回式(1)に基づいて算出された値ではなく、初期値(=0)または前回までに算出された値である、今までの補正量GLが維持され、処理がステップS210に進む。
【0074】
一方、ステップS190において|GL|<βが成立しない場合にはステップS210に処理が進み、ステップS180で算出された補正量GLをGセンサ442の出力の生値(そのままの値)G0に加えたものをGセンサ値Gとして扱うようにその後の処理が変更される。すなわち、G=G0+GLによってGセンサ値が算出される。これにより、次回のステップS100における判定に使用されるGセンサ値が補正されるので、上り坂において適切にニュートラル制御が禁止される。
【0075】
ステップS210の処理が終了すると、ステップS220において制御はメインルーチンに移される。
【0076】
本実施の形態に示した車両の制御装置によれば、Gセンサの出力が路面勾配に対してずれが生じている場合であっても、上り坂での初回のニュートラル制御実行時からの復帰時にGセンサ値の変動量ΔGが大きい場合にはGセンサの補正を行なうので、次回から上り坂ではニュートラル制御が適切に禁止される。したがって、乗員が後部座席に乗り込んだ場合や、サスペンションのバネ乗数やタイヤの空気圧の変化などが発生した場合や、Gセンサの出力の経年変化によるずれが発生した場合等でも、上り坂で発進時に大きく後退することを避けることができる。
【0077】
[変形例]
なお、以上の説明では、Gセンサ値の変動量ΔGを図5に示したようにニュートラル制御の復帰条件が成立した時刻t1から所定時間TGだけ後のGセンサ値GDに基づいて算出した。しかし変動量ΔGは他の方法に基づいて算出しても良い。
【0078】
図7は、第1の変形例における変動量ΔGの算出方法を説明するための波形図である。
図7を参照して、この変形例では変動量ΔGは、ニュートラル制御実行中のGセンサ値GNと極小値Gpとの差として求められる。
【0079】
極小値Gpは、ニュートラル制御の復帰条件が成立してから一定時間TだけGセンサをモニタしておき、そのうち極小となった値を極小値Gpとして採用する。
【0080】
この変形例では、このような方法によって図4のステップS170の変動量ΔGが演算される。なお、他の部分については同様に処理が行なわれるので説明は繰返さない。
【0081】
また、以上の説明では、上り坂でニュートラル制御が行なわれてしまった場合に、適切にニュートラル制御を禁止することについて説明してきた。ここで、Gセンサ値を補正しすぎると、本来ニュートラル制御を行なうべき平坦路においてニュートラル制御が禁止されることになる。そのような状態から正常な制御に戻る例について説明する。
【0082】
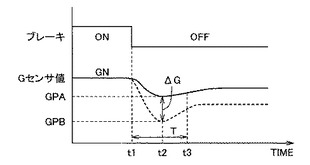
図8は、第1の変形例において平坦路においてニュートラル制御が禁止されるようになった状態から正常な制御に戻る例を説明するための波形図である。
【0083】
図8を参照して、Gセンサ値GPAは、制御部1000の認識上ニュートラル制御が実施される最大勾配での一定時間TにおけるGセンサ値の最小値である。また、Gセンサ値GPBは、ニュートラル制御が実施される最大勾配でのGセンサ値の基準値であり、予め実験的に定められメモリ1010に記憶されている値である。
【0084】
すなわち、Gセンサで検出され補正されたGセンサ値(図8のGN)が最大勾配であるとき、許容範囲であるわずかな後退に対応するGセンサの変化が観測されるはずである。しかし、Gセンサ値のずれにより、小さめにGNが出力されていれば図8に示すように変化後のセンサ値GPAは、本来の値GPBとは異なる。その差ΔGに基づいて補正量を決定すればよい。
【0085】
すなわち、補正量GLをGL=K3×(GPB−GPA)で算出して求め、補正を、G=G0+GLによって実行する。このとき、K3は正の定数であり、補正量GLは負の値となる。
【0086】
図8をもう少し具体的に説明するとたとえば、GNが勾配3°の上り坂相当のGセンサ値であるとする。勾配3°では本来GPBの加速度が観測されるはずである。しかし、制御部1000で観測されたのは、勾配2°相当の加速度GPAであった。この場合は、勾配が増加しすぎるようにGセンサ値が補正されてしまったか、補正前であればそのようにGセンサ値にずれが生じているかである。したがって、その勾配差1°に対応する分Gセンサ値を逆側に補正してやる。
【0087】
なお、最大勾配時のみに限らず逆方向の補正を行なっても良い。
図9は、図8で説明した補正を最大勾配でないときにも実行することを説明するための図である。
【0088】
図9に示すようなテーブルとして、路面勾配GN=1°,2°,3°・・・に対応させてそれぞれ標準G値GPB=G(1),G(2),G(3)…が予め求められメモリ1010に記憶しておくことにより、図4,図6で説明した場合と同様に、ニュートラル制御が実行されるごとに適切なGセンサ値の補正が実行される。
【0089】
以上の説明では、Gセンサ値のバラツキを補正することを説明してきたが、その代わりにニュートラル制御を実施する勾配の上限値を変更しても良い。
【0090】
図10は、ニュートラル制御を実施する勾配の上限値を変更する、第2の変形例について説明するための図である。
【0091】
図10に示すように、元々のニュートラル制御を実施する勾配の上限値を+θthとすると、この値をたとえば図7に示したようなΔG=GN−Gpに基づいて補正してやればよい。
【0092】
たとえば、ニュートラル制御実施勾配の上限値をθ0+Δθで設定する。θ0は制御部1000の内部の定数を示し、Δθは学習補正量を示す。そして補正量Δθは、図7に示した場合では、Δθ=−K4×K2(GN−Gp)で表わすことができる。
【0093】
最後に、本実施の形態について、再度図1等を用いて総括的に説明する。本実施の形態に係る制御装置は、前進走行ポジション、アクセル未操作状態、ブレーキ操作状態および車速が所定値以下であるという条件(N制御開始条件)が成立した場合に、駆動源であるエンジン100からの駆動力を自動変速機に伝達する入力クラッチC1を解放させるニュートラル制御を実行する車両の制御装置である。この制御装置は、路面勾配を検出するためのGセンサ442と、Gセンサ442の出力がニュートラル制御実行領域に入るという条件が成立する場合にニュートラル制御を有効とする制御を行なう制御部1000とを備える。制御部1000は、N制御開始条件が成立した状態から不成立の状態に変化する車両状態の遷移に応じて入力クラッチC1が解放状態から係合される状態に変化した際のGセンサ442の出力に生じる変動の大きさに基づいて、N制御開始条件の成立し易さを変更する。
【0094】
好ましくは、制御部1000は、N制御開始条件の成立し易さを変更するために、Gセンサ442の出力値の補正またはニュートラル制御実行領域の境界値に相当する図4のS100のG(θth)の補正を行なう。
【0095】
好ましくは、Gセンサ442は、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値G(θth)を超える場合(図4、S100でNO)に、ニュートラル制御が禁止されるように定められる。制御部1000は、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅ΔGが標準変動量(図4のα)よりも大きい場合にはニュートラル制御が禁止され易くなる方向にセンサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0096】
より好ましくは、標準変動量αは、図6に示すように、複数の路面勾配に対応してそれぞれ複数の値が予め定められている。
【0097】
より好ましくは、加速度センサによって検出された加速度の減少幅ΔGとは、図5に示すように、ニュートラル制御を実行している状態のGセンサ442の出力値GNと、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時刻t1から所定時間TG後におけるGセンサ442の出力値GDとの間の差分値である。
【0098】
より好ましくは、加速度センサによって検出された加速度の減少幅ΔGとは、図7に示すように、ニュートラル制御を実行している状態のGセンサ442の出力値GNと、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時から所定時間後までの間におけるセンサの出力値の最小値Gpとの間の差分値である。
【0099】
好ましくは、Gセンサ442は、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値G(θth)を超える場合(図4のS100でNO)に、ニュートラル制御が禁止されるように定められる。図8に示すように、制御部1000は、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅(GN−GPB)が、加速度センサの出力値に基づいて求められる路面勾配に対応する減少幅(GN−GPA)よりも大きい場合には、ニュートラル制御が禁止され易くなる方向にGセンサ442の出力値の補正またはニュートラル制御実行領域の境界値G(θth)の補正を行なう。
【0100】
好ましくは、Gセンサ442は、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値G(θth)を超える場合(図4のS100でNO)に、ニュートラル制御が禁止されるように定められる。制御部1000は、図4のS180の式に示されるように、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅が標準変動量αよりも小さい場合にはニュートラル制御が禁止され難くなる方向にセンサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0101】
好ましくは、Gセンサ442は、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値G(θth)を超える場合(図4のS100でNO)に、ニュートラル制御が禁止されるように定められる。制御部1000は、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅(GN−GPA)が、加速度センサの出力値に基づいて求められる路面勾配に対応する減少幅(GN−GPB)よりも小さい場合には、ニュートラル制御が禁止され難くなる方向にセンサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0102】
この発明は、他の局面においては、前進走行ポジション、アクセル未操作状態、ブレーキ操作状態および車速が所定値以下であるという条件が成立した場合に、駆動源からの駆動力を自動変速機に伝達する入力クラッチC1を解放させるニュートラル制御を実行する車両の制御方法であって、その車両は、路面勾配を検出するためのGセンサ442と、Gセンサ442の出力がニュートラル制御実行領域に入るという条件が成立する場合にニュートラル制御を有効とする制御を行なう制御部1000とを含む。制御方法は、図4に示すように、条件が成立した状態から不成立の状態に変化する車両状態の遷移を検出するステップS140と、車両状態の遷移に応じて入力クラッチが解放状態から係合される状態に変化した際のセンサの出力に生じる変動の大きさを検出するステップS170と、変動の大きさに基づいて、条件の成立し易さを変更するステップS180とを備える。
【0103】
本実施の形態では、ニュートラル制御が実行されてその後ニュートラル制御から復帰するたびに、Gセンサの値またはニュートラル制御実行領域の境界値が補正される。これにより、許容範囲を超える勾配の上り坂でニュートラル制御が実行されてしまったり、本来ニュートラル制御が実行されるべき平坦路でニュートラル制御が実行されなくなったりすることを減らすことができる。
【0104】
なお、本実施の形態においては、自動変速機をベルト式無段変速機として説明したが、本発明はこれに限定されない。自動変速機はトロイダル式無段変速機であっても、流体継手および遊星歯車式減速機構を有する自動変速機であってもよい。
【0105】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0106】
【図1】本実施の形態に係る車両のパワートレーンの構成を示す図である。
【図2】ニュートラル制御を上り坂で禁止する説明をするための図である。
【図3】勾配の検出の原理を説明するための図である。
【図4】本実施の形態に係る制御部1000で実行されるニュートラル制御処理のプログラムの制御構造について示したフローチャートである。
【図5】ニュートラル制御からの復帰処理を実行した場合の車両の動作について説明するための動作波形図である。
【図6】標準変動量αについて説明するための図である。
【図7】第1の変形例における変動量ΔGの算出方法を説明するための波形図である。
【図8】第1の変形例において平坦路においてニュートラル制御が禁止されるようになった状態から正常な制御に戻る例を説明するための波形図である。
【図9】図8で説明した補正を最大勾配でないときにも実行することを説明するための図である。
【図10】ニュートラル制御を実施する勾配の上限値を変更する、第2の変形例について説明するための図である。
【符号の説明】
【0107】
100 エンジン、200 トルクコンバータ、210 ロックアップクラッチ、220 ポンプ羽根車、230 タービン羽根車、240 ステータ、250 ワンウェイクラッチ、260 オイルポンプ、290 前後進切換装置、300 ベルト式無段変速機構、310 入力クラッチ、400 タービン回転数センサ、410 プライマリプーリ回転数センサ、420 セカンダリプーリ回転数センサ、430 エンジン回転数センサ、440 車輪速センサ、442 Gセンサ、444 アクセルポジションセンサ、446 フットブレーキスイッチ、448 シフトポジションセンサ、500 プライマリプーリ、600 セカンダリプーリ、700 ベルト、800 デファレンシャルギヤ、1000 制御部、1010 メモリ、1100 油圧制御部、1110 変速速度制御部、1120 ベルト挟圧力制御部、1130 ライン圧制御部、1132 ロックアップ係合圧制御部、1140 クラッチ圧力制御部、1150 マニュアルバルブ、1200,1210 変速制御用デューティソレノイド、1220 ベルト挟圧力制御用リニアソレノイド、1230 ライン圧制御用リニアソレノイド、1240 ロックアップ係合圧制御用デューティソレノイド、B1 リバースブレーキ、C1 入力クラッチ。
【技術分野】
【0001】
この発明は、車両の制御装置および車両の制御方法に関し、特に駆動源からの駆動力を自動変速機に伝達する入力クラッチに対してニュートラル制御を行なう車両の制御装置および車両の制御方法に関する。
【背景技術】
【0002】
車両に搭載される自動変速機は、エンジンとトルクコンバータ等を介して繋がるとともに複数の動力伝達経路を有してなる変速機構を有して構成され、例えば、アクセル開度および車速に基づいて自動的に変速比(走行速度段)の切換えを行なうように構成される。
【0003】
一般的に、自動変速機を有した車両には運転者により操作されるシフトレバーが設けられ、シフトレバー操作に基づいて変速ポジション(例えば、後進走行ポジション、ニュートラルポジション、前進走行ポジション)が設定されている。
【0004】
このような自動変速機を有した車両において、前進走行ポジションが設定されて車両が停止している状態では、アイドリング回転するエンジンからの駆動力がトルクコンバータを介して変速機に伝達され、これが車輪に伝達されるため、いわゆるクリープ現象が発生する。
【0005】
クリープ現象は、登坂路での停車からの発進をスムーズに行なわせることができるなど、所定条件下では非常に有用なのであるが、車両を停止保持したいときには不要な現象であり、車両のブレーキを作動させてクリープ力を抑えるようになっている。すなわち、エンジンからのクリープ力をブレーキにより抑えるようになっており、その分エンジンの燃費が低下するという問題がある。
【0006】
このようなことから、前進走行ポジションにおいて、ブレーキペダルが踏み込まれてブレーキが作動されるとともにアクセルがほぼ全閉となって車両が停止している状態では、前進走行ポジションのまま変速機をニュートラルに近いニュートラル状態として、燃費の向上を図るという制御(以下ニュートラル制御、またはN制御と称する)が提案されている。
【0007】
特開2002−71004号公報(特許文献1)は、所定勾配以上の上り坂ではニュートラル制御を禁止する車両の制御装置を開示する。
【特許文献1】特開2002−71004号公報
【特許文献2】特開2004−286146号公報
【特許文献3】特開2001−336618号公報
【特許文献4】特開2006−307866号公報
【特許文献5】特開2005−194934号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
上記の特開2002−71004号公報に開示された技術では、路面の勾配を勾配検出センサで検出しているが、勾配検出センサの製造バラツキによっては、本来であればニュートラル制御を実施しない路面勾配に停車した場合でもニュートラル制御が実施され、ブレーキの作動を解除する発進時に一瞬坂道を後退して下がってしまうことが考えられる。
【0009】
このバラツキを低減させるため、車両を工場から出荷する前にセンサのゼロ点学習をおこなえば初期のバラツキは低減させることができるが、勾配検出センサや車両のサスペンション等の経時劣化によるバラツキや、車両の使用状況による変化が存在する。
【0010】
たとえば、フロントのサスペンションにへたりが生じ、車両が前下がりになった場合や、平坦路でも下り坂であると判定されてしまう。この状態では、上り坂に停止しても平坦路であると判定されニュートラル制御が実行されてしまう。また、後部座席に人が座った場合や重い荷物をトランクルームに載せた場合には、車両の後ろが下がり、勾配検出センサの検出値にずれが生じる。
【0011】
また、勾配検出センサ自体が劣化した場合も同様である。例えば、センサ出力に勾配+3°相当の出力のずれが生じているときには、ニュートラル制御の実施を許可する最大勾配よりも+3°の上り坂でもニュートラル制御が実行されてしまう。
【0012】
この発明の目的は、車両状態が変化しても、登坂路においてニュートラル制御の禁止と許可を適切に制御することができる車両の制御装置および車両の制御方法を提供することである。
【課題を解決するための手段】
【0013】
この発明は、要約すると、前進走行ポジション、アクセル未操作状態、ブレーキ操作状態および車速が所定値以下であるという条件が成立した場合に、駆動源からの駆動力を自動変速機に伝達する入力クラッチを解放させるニュートラル制御を実行する車両の制御装置であって、路面勾配を検出するためのセンサと、センサの出力がニュートラル制御実行領域に入るという条件が成立する場合にニュートラル制御を有効とする制御を行なう制御部とを備える。制御部は、条件が成立した状態から不成立の状態に変化する車両状態の遷移に応じて入力クラッチが解放状態から係合される状態に変化した際のセンサの出力に生じる変動の大きさに基づいて、条件の成立し易さを変更する。
【0014】
好ましくは、制御部は、条件の成立し易さを変更するために、センサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0015】
好ましくは、センサは、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、ニュートラル制御が禁止されるように定められる。制御部は、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅が標準変動量よりも大きい場合にはニュートラル制御が禁止され易くなる方向にセンサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0016】
より好ましくは、標準変動量は、複数の路面勾配に対応してそれぞれ複数の値が予め定められている。
【0017】
より好ましくは、加速度センサによって検出された加速度の減少幅とは、ニュートラル制御を実行している状態のセンサの出力値と、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時から所定時間後におけるセンサの出力値との間の差分値である。
【0018】
より好ましくは、加速度センサによって検出された加速度の減少幅とは、ニュートラル制御を実行している状態のセンサの出力値と、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時から所定時間後までの間におけるセンサの出力値の最小値との間の差分値である。
【0019】
好ましくは、センサは、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、ニュートラル制御が禁止されるように定められる。制御部は、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅が、加速度センサの出力値に基づいて求められる路面勾配に対応する減少幅よりも大きい場合には、ニュートラル制御が禁止され易くなる方向にセンサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0020】
好ましくは、センサは、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、ニュートラル制御が禁止されるように定められる。制御部は、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅が標準変動量よりも小さい場合にはニュートラル制御が禁止され難くなる方向にセンサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0021】
好ましくは、センサは、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、ニュートラル制御が禁止されるように定められる。制御部は、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅が、加速度センサの出力値に基づいて求められる路面勾配に対応する減少幅よりも小さい場合には、ニュートラル制御が禁止され難くなる方向にセンサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0022】
この発明は、他の局面においては、前進走行ポジション、アクセル未操作状態、ブレーキ操作状態および車速が所定値以下であるという条件が成立した場合に、駆動源からの駆動力を自動変速機に伝達する入力クラッチを解放させるニュートラル制御を実行する車両の制御方法であって、その車両は、路面勾配を検出するためのセンサと、センサの出力がニュートラル制御実行領域に入るという条件が成立する場合にニュートラル制御を有効とする制御を行なう制御部とを含む。制御方法は、条件が成立した状態から不成立の状態に変化する車両状態の遷移を検出するステップと、車両状態の遷移に応じて入力クラッチが解放状態から係合される状態に変化した際のセンサの出力に生じる変動の大きさを検出するステップと、変動の大きさに基づいて、条件の成立し易さを変更するステップとを備える。
【発明の効果】
【0023】
本発明によれば、車両状態が変化しても、登坂路においてニュートラル制御の禁止と許可を適切に制御することができる。
【発明を実施するための最良の形態】
【0024】
以下、本発明の実施の形態について図面を参照しつつ詳細に説明する。なお、以下の説明では、同一の部品には同一の符号を付し、それらについての詳細な説明は繰返さない。
【0025】
図1は、本実施の形態に係る車両のパワートレーンの構成を示す図である。
図1を参照して、この車両のパワートレーンは、エンジン100と、トルクコンバータ200と、前後進切換装置290と、ベルト式無段変速機構300と、デファレンシャルギヤ800と、制御部1000と、油圧制御部1100とを含む。
【0026】
なお、無段変速機は、トルクコンバータ200と、前後進切換装置290と、ベルト式無段変速機構300と、油圧制御部1100とを含む。
【0027】
エンジン100の出力軸は、トルクコンバータ200の入力軸に接続される。エンジン100とトルクコンバータ200とは回転軸により連結されている。したがって、エンジン回転数センサ430により検出されるエンジン100の出力軸回転速度Ne(エンジン回転速度Ne)とトルクコンバータ200の入力軸回転速度(ポンプ回転速度)とは同じである。
【0028】
トルクコンバータ200は、入力軸と出力軸とを直結状態にするロックアップクラッチ210と、入力軸側のポンプ羽根車220と、出力軸側のタービン羽根車230と、ワンウェイクラッチ250を有しトルクを増幅するステータ240とを含む。トルクコンバータ200とベルト式無段変速機構300とは、回転軸により接続される。トルクコンバータ200の出力軸回転速度Nt(タービン回転速度Nt)は、タービン回転数センサ400により検出される。
【0029】
トルクコンバータ200とベルト式無段変速機構300との間には、オイルポンプ260が設けられる。オイルポンプ260は、たとえば、ギヤポンプであって、入力軸側のポンプ羽根車220が回転すると作動する。オイルポンプ260は、油圧制御部1100の各種ソレノイドに油圧を供給する。
【0030】
ベルト式無段変速機構300は、前後進切換装置290を介在させてトルクコンバータ200に接続される。ベルト式無段変速機構300は、入力側のプライマリプーリ500と、出力側のセカンダリプーリ600と、プライマリプーリ500とセカンダリプーリ600とに巻き掛けられた金属製のベルト700とを含む。
【0031】
プライマリプーリ500は、プライマリシャフトに固定された固定シーブおよびプライマリシャフトに摺動のみ自在に支持されている可動シーブとを含む。セカンダリプーリ600は、セカンダリシャフトに固定されている固定シーブおよびセカンダリシャフトに摺動のみ自在に支持されている可動シーブとを含む。
【0032】
プライマリプーリ500およびセカンダリプーリ600の油圧アクチュエータ(いずれも図示せず)には、それぞれ作動油が給排されている。変速は、各プーリ500,600の固定シーブと可動シーブとの間の溝幅を連続的に変化させることにより、ベルトの巻き掛け半径が大小に変化して行なわれる。
【0033】
油圧制御部1100は、プライマリプーリ500の回転速度を目標回転速度に一致させる変速比となるように、プライマリプーリ500の油圧アクチュエータに供給される油圧を制御する。さらに、油圧制御部1100は、セカンダリプーリ600の可動シーブを固定シーブ側に押圧してベルトを挟みつけてトルクを伝達するのに必要な張力が得られるようにセカンダリプーリ600の油圧アクチュエータに供給される油圧を制御する。
【0034】
ベルト式無段変速機構300のプライマリプーリ500の回転速度NINは、プライマリプーリ回転数センサ410により検出され、セカンダリプーリ600の回転速度NOUTは、セカンダリプーリ回転数センサ420により検出される。
【0035】
これら回転数センサは、プライマリプーリ500やセカンダリプーリ600の回転軸やこれに繋がるドライブシャフトに取付けられた回転検出用ギヤの歯に対向して設けられている。これらの回転数センサは、ベルト式無段変速機構300の、入力軸であるプライマリプーリ500や出力軸であるセカンダリプーリ600の僅かな回転の検出も可能なセンサであり、たとえば、一般的に半導体式センサと称される磁気抵抗素子を使用したセンサである。
【0036】
前後進切換装置290は、ダブルピニオンプラネタリギヤ、リバース(後進用)ブレーキB1および入力クラッチC1を有している。プラネタリギヤは、そのサンギヤが入力軸に連結されており、第1および第2のピニオンを支持するキャリヤがプライマリ側固定シーブに連結されており、そしてリングギヤが後進用摩擦係合要素となるリバースブレーキB1に連結されており、またキャリヤとリングギヤとの間に入力クラッチC1が介在している。この入力クラッチC1は、前進クラッチやフォワードクラッチとも呼ばれ、シフトポジションセンサ448が検出するシフトレバーのポジションが、パーキング(P)ポジション、リバース(R)ポジション、ニュートラル(N)ポジション以外のポジションであって車両が前進する前進ポジションにおいて係合状態で使用される。
【0037】
これらのパワートレーンを制御する制御部1000および油圧制御部1100について説明する。制御部1000は、ECU(電子制御ユニット)によって実現される。なお制御部1000は、1つのECUによって実現されるものであってもよいし、複数のECUによって実現されるものであってもよい。
【0038】
制御部1000には、タービン回転数センサ400からタービン回転速度Ntを表わす信号が、プライマリプーリ回転数センサ410からプライマリプーリ回転速度NINを表わす信号が、セカンダリプーリ回転数センサ420からセカンダリプーリ回転速度NOUTを表わす信号が、入力される。
【0039】
油圧制御部1100は、変速速度制御部1110と、ベルト挟圧力制御部1120と、ライン圧制御部1130と、ロックアップ係合圧制御部1132と、クラッチ圧力制御部1140と、マニュアルバルブ1150とを含む。制御部1000は、油圧制御部1100の変速制御用デューティソレノイド1200と、変速制御用デューティソレノイド1210と、ベルト挟圧力制御用リニアソレノイド1220と、ライン圧制御用リニアソレノイド1230と、ロックアップ係合圧制御用デューティソレノイド1240に対して制御信号を出力する。
【0040】
変速速度制御部1110は、変速制御用デューティソレノイド1200の出力油圧に応じて、プライマリプーリ500の油圧アクチュエータへの作動油の流入量を制御することにより増速側の変速速度を制御する。さらに、変速速度制御部1110は、変速制御用デューティソレノイド1210の出力油圧に応じて、プライマリプーリ500の油圧アクチュエータからの作動油の流出量を制御して減速側の変速速度を制御する。制御部1000は、車輪速やアクセル開度に応じて、変速制御用デューティソレノイド1200,1210を制御する。変速速度制御部1110によりプライマリプーリ500の油圧アクチュエータに対する作動油の流入量と流出量とを制御することにより変速制御が行なわれる。
【0041】
ベルト挟圧力制御部1120は、プライマリプーリ500の入力軸トルクと変速比とに応じて変化するベルト挟圧力制御用リニアソレノイド1220の出力油圧により、セカンダリプーリ600の油圧アクチュエータに供給される油圧を制御して、ベルト挟圧力を制御する。入力軸トルクは、たとえば、エンジン100の回転速度、吸入空気量等に基づくエンジン100の出力トルクとトルクコンバータ200におけるトルク比とから推定されてもよいし、直接的に検出されてもよい。
【0042】
ライン圧制御部1130は、ライン圧制御用リニアソレノイド1230の出力油圧に応じてライン圧を制御する。プライマリプーリ500のアクチュエータの油圧は、プライマリプーリ500の油圧アクチュエータへの作動油の流入量と流出量とに基づいて推定される。ここで、ライン圧とは、オイルポンプ260により供給された油圧がレギュレータバルブ(図示せず)により調圧された油圧である。
【0043】
ロックアップ係合圧制御部1132は、ロックアップ係合圧制御用デューティソレノイド1240の出力油圧によりロックアップクラッチ210の係合と解放の切換え、および、ロックアップクラッチ210の係合圧の漸増および漸減を制御する。
【0044】
マニュアルバルブ1150は、運転者のシフトレバーの操作に連動して作動して、油路を切換える。クラッチ圧力制御部1140は、入力クラッチC1またはリバースブレーキB1の係合時に、ライン圧制御用リニアソレノイド1230によりマニュアルバルブ1150を経由して供給される油圧をマニュアルバルブに供給する。
【0045】
制御部1000には、さらにアクセルポジションセンサ444から運転者により踏まれているアクセルの開度を表わす信号Acc、スロットルポジションセンサ(図示せず)から、電磁スロットルの開度を表わす信号、エンジン回転数センサ430から、エンジン100の回転速度(Ne)を表わす信号、シフトポジションセンサ448から前進走行ポジションか否かを示す信号、フットブレーキスイッチ446からフットブレーキが操作状態であるか否かを示す信号が、それぞれ入力される。
【0046】
車輪速センサ440は、車輪(図示せず)の回転速度を検出する。車輪速センサ440は、検出された車輪の回転速度を示す車輪速信号を制御部1000に送信する。なお、車速が検出できれば、特に車輪の回転速度を検出することに限定されるものではなく、たとえば、セカンダリプーリ回転速度と無段変速機から駆動輪までの減速比とに基づいて車速を演算するようにしてもよい。
【0047】
Gセンサ442は、車両に取付けられた加速度センサである。たとえば、上り坂などを検出してニュートラル制御を上り坂では行なわないような制御に用いることができる。
【0048】
図2は、ニュートラル制御を上り坂で禁止する説明をするための図である。
図3は、勾配の検出の原理を説明するための図である。
【0049】
図2、図3を参照して、路面の勾配をθとする。この勾配θは、たとえば車両の前後方向の加速度を検出する加速度センサを用いて検出することができる。停車状態では、重力加速度をgで示すと、上り坂に停車した場合、gsinθの後ろ向きの加速度成分が加速度センサに検出される。したがって、車速がゼロで後ろ向きの加速度成分が検出されれば車両は上り坂に停車中であることが分かる。
【0050】
なお、走行中の路面の勾配判定は、車輪速センサ440の出力から検出できる実際の加速度とGセンサ442で検出される前後方向の加速度との差の大きさに基づいて求めることができるが、ニュートラル制御は停車時に実行される制御であるので、ここでは詳細には説明しない。
【0051】
図2に示すように、しきい値をθthとすると坂の勾配θ>θthであればニュートラル制御を行なうと発進時に後退する恐れがあるので、停車してもニュートラル制御を禁止する。θ<θthでは、停車時にはニュートラル制御を実行し燃費を向上させる。θ<θthの領域をニュートラル制御実行領域とする。
【0052】
たとえば、θthを5°とすると、加速度センサの経時変化や車両の使用状況(たとえば乗員が後部座席に座ったなど)で勾配の検出値に3°のずれが生じてしまうと、ある車両ではニュートラル制御が禁止される上り坂でも、他の車両ではニュートラル制御が実行されてしまい、発進時に一瞬後退するような事態が生じる。
【0053】
したがって、本実施の形態においては、加速度センサの出力をそのときの車両の状態に合わせて補正し、ニュートラル制御の禁止および許可が個々の車両でばらつかないようにしている。
【0054】
図4は、本実施の形態に係る制御部1000で実行されるニュートラル制御処理のプログラムの制御構造について示したフローチャートである。このプログラムの処理は、所定のメインルーチンから一定時間ごとまたは所定の条件が成立するごとに呼び出されて実行される。
【0055】
図1、図4を参照して、まず、ステップS100において、制御部1000は、Gセンサ442から入力されたGセンサの値が、予め定められたしきい値G(θth)以下であるか否かを判断する。好ましくは、Gセンサの値の急な変化を取り除く処理を行なってからこの判断を行なっても良い。予め定められたしきい値G(θth)とは、ニュートラル制御を実行するために車両が停車している場所が上り坂でないことを示すしきい値である。
【0056】
ステップS100においてGセンサの値がしきい値G(θth)以下であった場合には(ステップS100にてYES)、処理はステップS110へ移される。ステップS100においてGセンサの値がしきい値G(θth)以下でない場合には(ステップS100にてNO)、ステップS220に処理が進み、制御はメインルーチンに移される。
【0057】
ステップS110にて、制御部1000は、ニュートラル制御の開始条件が成立したか否かを判断する。この判断は、たとえば運転者によりアクセルペダルが踏まれていないこと、運転者によりブレーキが踏まれていること、前進走行(D)ポジションであること、車両が停止していることなどに基づいて行なわれる。さらに具体的には、この判断は、車輪速センサ440の出力に基づいて検出される車速、制御部1000に入力されるアクセルポジションセンサ444の出力するアクセル開度Acc、シフトポジションセンサ448によって検出されるシフトポジション、フットブレーキスイッチから制御部1000に入力される信号などに基づいて行なわれる。
【0058】
ステップS110で適用されるニュートラル制御の開始条件は、アクセルペダルが踏まれていないこと、運転者によりブレーキが踏まれていること、前進走行(D)ポジションであること、車両が停止していることが同時に成立しているという条件を少なくとも含むが、他の条件を追加的に含めても良い。
【0059】
ステップS110においてニュートラル制御の開始条件が成立している場合には(ステップS110にてYES)ステップS120に処理が進み、成立していない場合には(ステップS110にてNO)ステップS220に処理が進み制御はメインルーチンに移される。
【0060】
ステップS120にて、制御部1000は、ニュートラル制御(N制御)を開始させる。このとき、制御部1000は、リニアソレノイド1230に指令値を出力し、クラッチ圧力制御部1140を介して入力クラッチC1を解放するように制御する。
【0061】
ステップS130にて、制御部1000は、Gセンサ442から入力されるGセンサの値がしきい値G(θth)以下であるか否かを判断する。この処理は、前述のステップS100における処理と同じである。Gセンサの値が予め定められたしきい値G(θth)以下であると(ステップS130にてYES)、処理はステップS140へ移される。Gセンサの値が予め定められたしきい値G(θth)以下でないと(ステップS130にてNO)、処理はステップS160へ移される。
【0062】
ステップS140にて、制御部1000は、ニュートラル制御復帰条件が成立したか否かを判断する。この判断は、たとえば、運転者によりアクセルペダルが踏まれたことや、運転者がブレーキペダルを放したことや、ドライブポジションを変更したことなどに基づいて行なわれる。ニュートラル制御の復帰条件が成立した場合には(ステップS140にてYES)、処理はステップS160へ移される。ニュートラル制御の復帰条件が成立しない場合には(ステップS140にてNO)は、処理はステップS150へ移される。
【0063】
ステップS150にて、制御部1000は、ニュートラル制御を継続する。その後予め定められたサンプリングタイム毎にステップS130、S140の処理が実行され、Gセンサから入力されるGセンサの値が予め定められたしきい値以下であるか否かおよびニュートラル制御の復帰条件が成立するか否かが判断される。
【0064】
ステップS160では、制御部1000は、ニュートラル制御からの復帰処理を実行する。このとき、制御部1000は、リニアソレノイド1230に指令信号を出力し、クラッチ圧力制御部1140を介して入力クラッチC1を係合させる。
【0065】
図5は、ニュートラル制御からの復帰処理を実行した場合の車両の動作について説明するための動作波形図である。
【0066】
図4、図5を参照して、時刻t1までは、ニュートラル制御が実行され、入力クラッチC1は非係合または半係合状態となっている。ブレーキペダルが放されたことに応じてフットブレーキスイッチからのブレーキ信号がON状態からOFF状態に変化する。するとステップS140においてニュートラル復帰条件が成立するので、時刻t1において、ニュートラル制御からの復帰処理が開始される。まず、クラッチ圧指示値PがPNまで増加することによって、クラッチC1の係合が強められる。
【0067】
すると、エンジン回転速度Neとタービン回転速度Ntの差であるスリップ量ΔNが増大し始める。スリップ量ΔNの増加が検出されると、時刻t3〜t4の間において制御部1000は、次第にクラッチ圧指示値Pを増大させる。そして、時刻t4以降は、タービン回転速度Ntがゼロとなり、停車中において通常のクリープ力が図1のトルクコンバータ200で発生するようになり、ニュートラル制御からの復帰が完了する。
【0068】
ここで、時刻t1でブレーキがOFFとなると、ニュートラル制御によってクリープ力が低下しているので、上り坂(登坂路)ではずり下がりが目立つ場合がある。したがって、Gセンサ442の出力をモニタしておくことでずり下がりが目立つ場合には、次回からは同じような勾配ではニュートラル制御を行なわないように、ニュートラル制御を禁止するほうが良い。
【0069】
禁止する方法としては、Gセンサ442の補正を行なう方法とニュートラル制御の実行と禁止の境界の勾配(しきい値G(θth))を変更する方法とが考えられる。ここでは一例としてGセンサ442の補正を行なう方法について説明する。
【0070】
制御部1000は、図4のステップS160のニュートラル制御復帰時において、Gセンサ442の出力値のモニタを行なっており、ステップS170においてその変動量ΔGを演算する。たとえば、図5に示すように、ニュートラル制御実行中のGセンサ値GNとニュートラル制御復帰条件成立から時間TG後の時刻t2におけるGセンサ値GDとの差(GN−GD)をΔGとして演算する。
【0071】
そしてステップS180において制御部1000は、変動量ΔGおよび標準変動量αに基づいて、Gセンサ値の補正値GLを算出する。
【0072】
図6は、標準変動量αについて説明するための図である。
図6に示すように、路面勾配GNごとに対応する標準的な変動量ΔGが予め実験的に求められて、標準変動量αとして図1の制御部1000内のメモリ1010に記憶されている。図6では、路面勾配1°,2°,3°…に対応させてそれぞれα1,α2,α3が標準変動量として記憶されている。
【0073】
再び図4を参照して、ステップS180では、Gセンサの出力値の補正量GLが新たに次式(1)に基づいて算出される。なお、式(1)においてK1はゲインを示す正の定数を表わし、ΔGはセンサで検出された変動量を表わし、αは標準変動量を表わす。
GL=K1×(ΔG−α) …(1)
続いて、ステップS190において、補正量GLがノイズレベル程度であれば、正負方向に補正が繰返されるハンチングを防ぐために補正量を変更しないように処理が行なわれる。すなわち、ステップS190では、ノイズレベルに対応するしきい値βと、ステップS190で算出された補正量GLの大きさ|GL|が比較される。ステップS200において|GL|<βが成立する場合には、ステップS200に処理が進み、Gセンサの出力値の補正量GLは変更されない。すなわち、ステップS180で今回式(1)に基づいて算出された値ではなく、初期値(=0)または前回までに算出された値である、今までの補正量GLが維持され、処理がステップS210に進む。
【0074】
一方、ステップS190において|GL|<βが成立しない場合にはステップS210に処理が進み、ステップS180で算出された補正量GLをGセンサ442の出力の生値(そのままの値)G0に加えたものをGセンサ値Gとして扱うようにその後の処理が変更される。すなわち、G=G0+GLによってGセンサ値が算出される。これにより、次回のステップS100における判定に使用されるGセンサ値が補正されるので、上り坂において適切にニュートラル制御が禁止される。
【0075】
ステップS210の処理が終了すると、ステップS220において制御はメインルーチンに移される。
【0076】
本実施の形態に示した車両の制御装置によれば、Gセンサの出力が路面勾配に対してずれが生じている場合であっても、上り坂での初回のニュートラル制御実行時からの復帰時にGセンサ値の変動量ΔGが大きい場合にはGセンサの補正を行なうので、次回から上り坂ではニュートラル制御が適切に禁止される。したがって、乗員が後部座席に乗り込んだ場合や、サスペンションのバネ乗数やタイヤの空気圧の変化などが発生した場合や、Gセンサの出力の経年変化によるずれが発生した場合等でも、上り坂で発進時に大きく後退することを避けることができる。
【0077】
[変形例]
なお、以上の説明では、Gセンサ値の変動量ΔGを図5に示したようにニュートラル制御の復帰条件が成立した時刻t1から所定時間TGだけ後のGセンサ値GDに基づいて算出した。しかし変動量ΔGは他の方法に基づいて算出しても良い。
【0078】
図7は、第1の変形例における変動量ΔGの算出方法を説明するための波形図である。
図7を参照して、この変形例では変動量ΔGは、ニュートラル制御実行中のGセンサ値GNと極小値Gpとの差として求められる。
【0079】
極小値Gpは、ニュートラル制御の復帰条件が成立してから一定時間TだけGセンサをモニタしておき、そのうち極小となった値を極小値Gpとして採用する。
【0080】
この変形例では、このような方法によって図4のステップS170の変動量ΔGが演算される。なお、他の部分については同様に処理が行なわれるので説明は繰返さない。
【0081】
また、以上の説明では、上り坂でニュートラル制御が行なわれてしまった場合に、適切にニュートラル制御を禁止することについて説明してきた。ここで、Gセンサ値を補正しすぎると、本来ニュートラル制御を行なうべき平坦路においてニュートラル制御が禁止されることになる。そのような状態から正常な制御に戻る例について説明する。
【0082】
図8は、第1の変形例において平坦路においてニュートラル制御が禁止されるようになった状態から正常な制御に戻る例を説明するための波形図である。
【0083】
図8を参照して、Gセンサ値GPAは、制御部1000の認識上ニュートラル制御が実施される最大勾配での一定時間TにおけるGセンサ値の最小値である。また、Gセンサ値GPBは、ニュートラル制御が実施される最大勾配でのGセンサ値の基準値であり、予め実験的に定められメモリ1010に記憶されている値である。
【0084】
すなわち、Gセンサで検出され補正されたGセンサ値(図8のGN)が最大勾配であるとき、許容範囲であるわずかな後退に対応するGセンサの変化が観測されるはずである。しかし、Gセンサ値のずれにより、小さめにGNが出力されていれば図8に示すように変化後のセンサ値GPAは、本来の値GPBとは異なる。その差ΔGに基づいて補正量を決定すればよい。
【0085】
すなわち、補正量GLをGL=K3×(GPB−GPA)で算出して求め、補正を、G=G0+GLによって実行する。このとき、K3は正の定数であり、補正量GLは負の値となる。
【0086】
図8をもう少し具体的に説明するとたとえば、GNが勾配3°の上り坂相当のGセンサ値であるとする。勾配3°では本来GPBの加速度が観測されるはずである。しかし、制御部1000で観測されたのは、勾配2°相当の加速度GPAであった。この場合は、勾配が増加しすぎるようにGセンサ値が補正されてしまったか、補正前であればそのようにGセンサ値にずれが生じているかである。したがって、その勾配差1°に対応する分Gセンサ値を逆側に補正してやる。
【0087】
なお、最大勾配時のみに限らず逆方向の補正を行なっても良い。
図9は、図8で説明した補正を最大勾配でないときにも実行することを説明するための図である。
【0088】
図9に示すようなテーブルとして、路面勾配GN=1°,2°,3°・・・に対応させてそれぞれ標準G値GPB=G(1),G(2),G(3)…が予め求められメモリ1010に記憶しておくことにより、図4,図6で説明した場合と同様に、ニュートラル制御が実行されるごとに適切なGセンサ値の補正が実行される。
【0089】
以上の説明では、Gセンサ値のバラツキを補正することを説明してきたが、その代わりにニュートラル制御を実施する勾配の上限値を変更しても良い。
【0090】
図10は、ニュートラル制御を実施する勾配の上限値を変更する、第2の変形例について説明するための図である。
【0091】
図10に示すように、元々のニュートラル制御を実施する勾配の上限値を+θthとすると、この値をたとえば図7に示したようなΔG=GN−Gpに基づいて補正してやればよい。
【0092】
たとえば、ニュートラル制御実施勾配の上限値をθ0+Δθで設定する。θ0は制御部1000の内部の定数を示し、Δθは学習補正量を示す。そして補正量Δθは、図7に示した場合では、Δθ=−K4×K2(GN−Gp)で表わすことができる。
【0093】
最後に、本実施の形態について、再度図1等を用いて総括的に説明する。本実施の形態に係る制御装置は、前進走行ポジション、アクセル未操作状態、ブレーキ操作状態および車速が所定値以下であるという条件(N制御開始条件)が成立した場合に、駆動源であるエンジン100からの駆動力を自動変速機に伝達する入力クラッチC1を解放させるニュートラル制御を実行する車両の制御装置である。この制御装置は、路面勾配を検出するためのGセンサ442と、Gセンサ442の出力がニュートラル制御実行領域に入るという条件が成立する場合にニュートラル制御を有効とする制御を行なう制御部1000とを備える。制御部1000は、N制御開始条件が成立した状態から不成立の状態に変化する車両状態の遷移に応じて入力クラッチC1が解放状態から係合される状態に変化した際のGセンサ442の出力に生じる変動の大きさに基づいて、N制御開始条件の成立し易さを変更する。
【0094】
好ましくは、制御部1000は、N制御開始条件の成立し易さを変更するために、Gセンサ442の出力値の補正またはニュートラル制御実行領域の境界値に相当する図4のS100のG(θth)の補正を行なう。
【0095】
好ましくは、Gセンサ442は、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値G(θth)を超える場合(図4、S100でNO)に、ニュートラル制御が禁止されるように定められる。制御部1000は、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅ΔGが標準変動量(図4のα)よりも大きい場合にはニュートラル制御が禁止され易くなる方向にセンサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0096】
より好ましくは、標準変動量αは、図6に示すように、複数の路面勾配に対応してそれぞれ複数の値が予め定められている。
【0097】
より好ましくは、加速度センサによって検出された加速度の減少幅ΔGとは、図5に示すように、ニュートラル制御を実行している状態のGセンサ442の出力値GNと、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時刻t1から所定時間TG後におけるGセンサ442の出力値GDとの間の差分値である。
【0098】
より好ましくは、加速度センサによって検出された加速度の減少幅ΔGとは、図7に示すように、ニュートラル制御を実行している状態のGセンサ442の出力値GNと、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時から所定時間後までの間におけるセンサの出力値の最小値Gpとの間の差分値である。
【0099】
好ましくは、Gセンサ442は、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値G(θth)を超える場合(図4のS100でNO)に、ニュートラル制御が禁止されるように定められる。図8に示すように、制御部1000は、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅(GN−GPB)が、加速度センサの出力値に基づいて求められる路面勾配に対応する減少幅(GN−GPA)よりも大きい場合には、ニュートラル制御が禁止され易くなる方向にGセンサ442の出力値の補正またはニュートラル制御実行領域の境界値G(θth)の補正を行なう。
【0100】
好ましくは、Gセンサ442は、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値G(θth)を超える場合(図4のS100でNO)に、ニュートラル制御が禁止されるように定められる。制御部1000は、図4のS180の式に示されるように、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅が標準変動量αよりも小さい場合にはニュートラル制御が禁止され難くなる方向にセンサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0101】
好ましくは、Gセンサ442は、加速度センサである。ニュートラル制御実行領域は、加速度センサの出力が上り坂を示しかつ実行しきい値G(θth)を超える場合(図4のS100でNO)に、ニュートラル制御が禁止されるように定められる。制御部1000は、ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に加速度センサによって検出された加速度の減少幅(GN−GPA)が、加速度センサの出力値に基づいて求められる路面勾配に対応する減少幅(GN−GPB)よりも小さい場合には、ニュートラル制御が禁止され難くなる方向にセンサの出力値の補正またはニュートラル制御実行領域の境界値の補正を行なう。
【0102】
この発明は、他の局面においては、前進走行ポジション、アクセル未操作状態、ブレーキ操作状態および車速が所定値以下であるという条件が成立した場合に、駆動源からの駆動力を自動変速機に伝達する入力クラッチC1を解放させるニュートラル制御を実行する車両の制御方法であって、その車両は、路面勾配を検出するためのGセンサ442と、Gセンサ442の出力がニュートラル制御実行領域に入るという条件が成立する場合にニュートラル制御を有効とする制御を行なう制御部1000とを含む。制御方法は、図4に示すように、条件が成立した状態から不成立の状態に変化する車両状態の遷移を検出するステップS140と、車両状態の遷移に応じて入力クラッチが解放状態から係合される状態に変化した際のセンサの出力に生じる変動の大きさを検出するステップS170と、変動の大きさに基づいて、条件の成立し易さを変更するステップS180とを備える。
【0103】
本実施の形態では、ニュートラル制御が実行されてその後ニュートラル制御から復帰するたびに、Gセンサの値またはニュートラル制御実行領域の境界値が補正される。これにより、許容範囲を超える勾配の上り坂でニュートラル制御が実行されてしまったり、本来ニュートラル制御が実行されるべき平坦路でニュートラル制御が実行されなくなったりすることを減らすことができる。
【0104】
なお、本実施の形態においては、自動変速機をベルト式無段変速機として説明したが、本発明はこれに限定されない。自動変速機はトロイダル式無段変速機であっても、流体継手および遊星歯車式減速機構を有する自動変速機であってもよい。
【0105】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0106】
【図1】本実施の形態に係る車両のパワートレーンの構成を示す図である。
【図2】ニュートラル制御を上り坂で禁止する説明をするための図である。
【図3】勾配の検出の原理を説明するための図である。
【図4】本実施の形態に係る制御部1000で実行されるニュートラル制御処理のプログラムの制御構造について示したフローチャートである。
【図5】ニュートラル制御からの復帰処理を実行した場合の車両の動作について説明するための動作波形図である。
【図6】標準変動量αについて説明するための図である。
【図7】第1の変形例における変動量ΔGの算出方法を説明するための波形図である。
【図8】第1の変形例において平坦路においてニュートラル制御が禁止されるようになった状態から正常な制御に戻る例を説明するための波形図である。
【図9】図8で説明した補正を最大勾配でないときにも実行することを説明するための図である。
【図10】ニュートラル制御を実施する勾配の上限値を変更する、第2の変形例について説明するための図である。
【符号の説明】
【0107】
100 エンジン、200 トルクコンバータ、210 ロックアップクラッチ、220 ポンプ羽根車、230 タービン羽根車、240 ステータ、250 ワンウェイクラッチ、260 オイルポンプ、290 前後進切換装置、300 ベルト式無段変速機構、310 入力クラッチ、400 タービン回転数センサ、410 プライマリプーリ回転数センサ、420 セカンダリプーリ回転数センサ、430 エンジン回転数センサ、440 車輪速センサ、442 Gセンサ、444 アクセルポジションセンサ、446 フットブレーキスイッチ、448 シフトポジションセンサ、500 プライマリプーリ、600 セカンダリプーリ、700 ベルト、800 デファレンシャルギヤ、1000 制御部、1010 メモリ、1100 油圧制御部、1110 変速速度制御部、1120 ベルト挟圧力制御部、1130 ライン圧制御部、1132 ロックアップ係合圧制御部、1140 クラッチ圧力制御部、1150 マニュアルバルブ、1200,1210 変速制御用デューティソレノイド、1220 ベルト挟圧力制御用リニアソレノイド、1230 ライン圧制御用リニアソレノイド、1240 ロックアップ係合圧制御用デューティソレノイド、B1 リバースブレーキ、C1 入力クラッチ。
【特許請求の範囲】
【請求項1】
前進走行ポジション、アクセル未操作状態、ブレーキ操作状態および車速が所定値以下であるという条件が成立した場合に、駆動源からの駆動力を自動変速機に伝達する入力クラッチを解放させるニュートラル制御を実行する車両の制御装置であって、
路面勾配を検出するためのセンサと、
前記センサの出力がニュートラル制御実行領域に入るという条件が成立する場合に前記ニュートラル制御を有効とする制御を行なう制御部とを備え、
前記制御部は、前記条件が成立した状態から不成立の状態に変化する車両状態の遷移に応じて前記入力クラッチが解放状態から係合される状態に変化した際の前記センサの出力に生じる変動の大きさに基づいて、前記条件の成立し易さを変更する、車両の制御装置。
【請求項2】
前記制御部は、前記条件の成立し易さを変更するために、前記センサの出力値の補正または前記ニュートラル制御実行領域の境界値の補正を行なう、請求項1に記載の車両の制御装置。
【請求項3】
前記センサは、加速度センサであり、
前記ニュートラル制御実行領域は、前記加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、前記ニュートラル制御が禁止されるように定められ、
前記制御部は、前記ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に前記加速度センサによって検出された加速度の減少幅が標準変動量よりも大きい場合には前記ニュートラル制御が禁止され易くなる方向に前記センサの出力値の補正または前記ニュートラル制御実行領域の境界値の補正を行なう、請求項1または2に記載の車両の制御装置。
【請求項4】
前記標準変動量は、複数の路面勾配に対応してそれぞれ複数の値が予め定められている、請求項3に記載の車両の制御装置。
【請求項5】
前記加速度センサによって検出された加速度の前記減少幅とは、前記ニュートラル制御を実行している状態の前記センサの出力値と、前記ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時から所定時間後における前記センサの出力値との間の差分値である、請求項3または4に記載の車両の制御装置。
【請求項6】
前記加速度センサによって検出された加速度の前記減少幅とは、前記ニュートラル制御を実行している状態の前記センサの出力値と、前記ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時から所定時間後までの間における前記センサの出力値の最小値との間の差分値である、請求項3または4に記載の車両の制御装置。
【請求項7】
前記センサは、加速度センサであり、
前記ニュートラル制御実行領域は、前記加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、前記ニュートラル制御が禁止されるように定められ、
前記制御部は、前記ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に前記加速度センサによって検出された加速度の減少幅が、前記加速度センサの出力値に基づいて求められる路面勾配に対応する減少幅よりも大きい場合には、前記ニュートラル制御が禁止され易くなる方向に前記センサの出力値の補正または前記ニュートラル制御実行領域の境界値の補正を行なう、請求項1に記載の車両の制御装置。
【請求項8】
前記センサは、加速度センサであり、
前記ニュートラル制御実行領域は、前記加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、前記ニュートラル制御が禁止されるように定められ、
前記制御部は、前記ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に前記加速度センサによって検出された加速度の減少幅が標準変動量よりも小さい場合には前記ニュートラル制御が禁止され難くなる方向に前記センサの出力値の補正または前記ニュートラル制御実行領域の境界値の補正を行なう、請求項1に記載の車両の制御装置。
【請求項9】
前記センサは、加速度センサであり、
前記ニュートラル制御実行領域は、前記加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、前記ニュートラル制御が禁止されるように定められ、
前記制御部は、前記ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に前記加速度センサによって検出された加速度の減少幅が、前記加速度センサの出力値に基づいて求められる路面勾配に対応する減少幅よりも小さい場合には、前記ニュートラル制御が禁止され難くなる方向に前記センサの出力値の補正または前記ニュートラル制御実行領域の境界値の補正を行なう、請求項1に記載の車両の制御装置。
【請求項10】
前進走行ポジション、アクセル未操作状態、ブレーキ操作状態および車速が所定値以下であるという条件が成立した場合に、駆動源からの駆動力を自動変速機に伝達する入力クラッチを解放させるニュートラル制御を実行する車両の制御方法であって、
前記車両は、
路面勾配を検出するためのセンサと、
前記センサの出力がニュートラル制御実行領域に入るという条件が成立する場合に前記ニュートラル制御を有効とする制御を行なう制御部とを含み、
前記制御方法は、
前記条件が成立した状態から不成立の状態に変化する車両状態の遷移を検出するステップと、
車両状態の遷移に応じて前記入力クラッチが解放状態から係合される状態に変化した際の前記センサの出力に生じる変動の大きさを検出するステップと、
前記変動の大きさに基づいて、前記条件の成立し易さを変更するステップとを備える、車両の制御方法。
【請求項1】
前進走行ポジション、アクセル未操作状態、ブレーキ操作状態および車速が所定値以下であるという条件が成立した場合に、駆動源からの駆動力を自動変速機に伝達する入力クラッチを解放させるニュートラル制御を実行する車両の制御装置であって、
路面勾配を検出するためのセンサと、
前記センサの出力がニュートラル制御実行領域に入るという条件が成立する場合に前記ニュートラル制御を有効とする制御を行なう制御部とを備え、
前記制御部は、前記条件が成立した状態から不成立の状態に変化する車両状態の遷移に応じて前記入力クラッチが解放状態から係合される状態に変化した際の前記センサの出力に生じる変動の大きさに基づいて、前記条件の成立し易さを変更する、車両の制御装置。
【請求項2】
前記制御部は、前記条件の成立し易さを変更するために、前記センサの出力値の補正または前記ニュートラル制御実行領域の境界値の補正を行なう、請求項1に記載の車両の制御装置。
【請求項3】
前記センサは、加速度センサであり、
前記ニュートラル制御実行領域は、前記加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、前記ニュートラル制御が禁止されるように定められ、
前記制御部は、前記ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に前記加速度センサによって検出された加速度の減少幅が標準変動量よりも大きい場合には前記ニュートラル制御が禁止され易くなる方向に前記センサの出力値の補正または前記ニュートラル制御実行領域の境界値の補正を行なう、請求項1または2に記載の車両の制御装置。
【請求項4】
前記標準変動量は、複数の路面勾配に対応してそれぞれ複数の値が予め定められている、請求項3に記載の車両の制御装置。
【請求項5】
前記加速度センサによって検出された加速度の前記減少幅とは、前記ニュートラル制御を実行している状態の前記センサの出力値と、前記ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時から所定時間後における前記センサの出力値との間の差分値である、請求項3または4に記載の車両の制御装置。
【請求項6】
前記加速度センサによって検出された加速度の前記減少幅とは、前記ニュートラル制御を実行している状態の前記センサの出力値と、前記ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時から所定時間後までの間における前記センサの出力値の最小値との間の差分値である、請求項3または4に記載の車両の制御装置。
【請求項7】
前記センサは、加速度センサであり、
前記ニュートラル制御実行領域は、前記加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、前記ニュートラル制御が禁止されるように定められ、
前記制御部は、前記ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に前記加速度センサによって検出された加速度の減少幅が、前記加速度センサの出力値に基づいて求められる路面勾配に対応する減少幅よりも大きい場合には、前記ニュートラル制御が禁止され易くなる方向に前記センサの出力値の補正または前記ニュートラル制御実行領域の境界値の補正を行なう、請求項1に記載の車両の制御装置。
【請求項8】
前記センサは、加速度センサであり、
前記ニュートラル制御実行領域は、前記加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、前記ニュートラル制御が禁止されるように定められ、
前記制御部は、前記ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に前記加速度センサによって検出された加速度の減少幅が標準変動量よりも小さい場合には前記ニュートラル制御が禁止され難くなる方向に前記センサの出力値の補正または前記ニュートラル制御実行領域の境界値の補正を行なう、請求項1に記載の車両の制御装置。
【請求項9】
前記センサは、加速度センサであり、
前記ニュートラル制御実行領域は、前記加速度センサの出力が上り坂を示しかつ実行しきい値を超える場合に、前記ニュートラル制御が禁止されるように定められ、
前記制御部は、前記ブレーキ操作状態からブレーキ未操作状態に車両状態が遷移した時に前記加速度センサによって検出された加速度の減少幅が、前記加速度センサの出力値に基づいて求められる路面勾配に対応する減少幅よりも小さい場合には、前記ニュートラル制御が禁止され難くなる方向に前記センサの出力値の補正または前記ニュートラル制御実行領域の境界値の補正を行なう、請求項1に記載の車両の制御装置。
【請求項10】
前進走行ポジション、アクセル未操作状態、ブレーキ操作状態および車速が所定値以下であるという条件が成立した場合に、駆動源からの駆動力を自動変速機に伝達する入力クラッチを解放させるニュートラル制御を実行する車両の制御方法であって、
前記車両は、
路面勾配を検出するためのセンサと、
前記センサの出力がニュートラル制御実行領域に入るという条件が成立する場合に前記ニュートラル制御を有効とする制御を行なう制御部とを含み、
前記制御方法は、
前記条件が成立した状態から不成立の状態に変化する車両状態の遷移を検出するステップと、
車両状態の遷移に応じて前記入力クラッチが解放状態から係合される状態に変化した際の前記センサの出力に生じる変動の大きさを検出するステップと、
前記変動の大きさに基づいて、前記条件の成立し易さを変更するステップとを備える、車両の制御方法。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】

【図10】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2009−250401(P2009−250401A)
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願番号】特願2008−101798(P2008−101798)
【出願日】平成20年4月9日(2008.4.9)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願日】平成20年4月9日(2008.4.9)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]