
車両の制御装置及び車両警報システム
【課題】
運転者に対する事故多発地点の警報を効果的に与える。
【解決手段】
事故多発地点における、自車位置情報,自車走行状態,他車位置情報,他車走行状態を含む事故多発情報をVICS受信機12から入手し、GPS受信機11から入手した自車位置情報,車速センサ13から入手した自車走行状態、及びレーダ16またはカメラ17の少なくともいずれか一方からの情報に基づき求めた他車位置情報及び他車走行状態を入手する。入手した事故多発地点の自車位置情報,自車走行状態,他車位置情報,他車走行状態と、実際の自車位置情報,自車走行状態,他車位置情報,他車走行状態とを比較して、運転者への警報信号を出力する。
運転者に対する事故多発地点の警報を効果的に与える。
【解決手段】
事故多発地点における、自車位置情報,自車走行状態,他車位置情報,他車走行状態を含む事故多発情報をVICS受信機12から入手し、GPS受信機11から入手した自車位置情報,車速センサ13から入手した自車走行状態、及びレーダ16またはカメラ17の少なくともいずれか一方からの情報に基づき求めた他車位置情報及び他車走行状態を入手する。入手した事故多発地点の自車位置情報,自車走行状態,他車位置情報,他車走行状態と、実際の自車位置情報,自車走行状態,他車位置情報,他車走行状態とを比較して、運転者への警報信号を出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の制御装置および車両警報システムに係り、特に事故多発地点における警報動作に関する。
【背景技術】
【0002】
従来より、安全性向上のため、過去に発生した事故データに基づいて、車両が事故多発地点へ近づいた時に警報を行い、運転者へ注意喚起を行う走行情報提供装置が開発されている。これは、過去に発生した事故データを蓄積した事故多発地点情報を活用し、自車両が事故多発地点を通過する場合、警報を行うものである。
【0003】
例えば、過去に発生した事故統計データをその発生場所,事故原因,発生件数等とともに記憶しておき、記憶した道路地図情報と、車輪速センサ,GPSによる現在車両位置を比較し、車両が事故多発地点に到達しかかっていることを車室内に設置された表示装置,音声出力装置により運転者に報知し、注意を促す技術がある(例えば特許文献1参照)。
【0004】
【特許文献1】特開平04−309810号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし上記従来技術では、事故多発地点に差し掛かるたびに警報され、また、事故が起こりえない状況にあっても警報されるため、運転者が警報に慣れてしまい、警報があったとしても十分な注意を払わなくなってしまうという問題がある。
【0006】
そこで本発明は、運転者に対する事故多発地点の警報を効果的に与えることを目的とする。
【課題を解決するための手段】
【0007】
過去の事故等における車両挙動と、実際の自他車の車両挙動を比較し、その比較結果に応じて運転者への警報信号を出力する。
【発明の効果】
【0008】
本発明によれば、運転者に対し、事故多発地点での警報を効果的に与えることができる。
【発明を実施するための最良の形態】
【0009】
以下、図を用いて本発明の実施形態を説明する。
【0010】
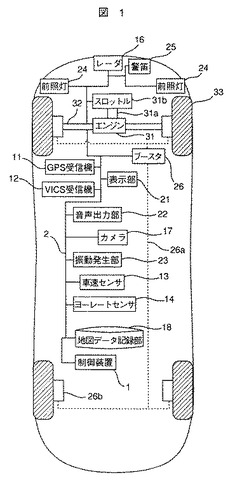
図1は、本発明の一実施形態をなす車両のブロック構成図を示す。
【0011】
制御装置1は、マイクロコンピューターとその周辺部品を備え、GPS受信機11による自車両の位置と、車速センサ13による自車両の速度と、VICS受信機12による事故多発地点の情報と、レーダ16やカメラ17による他車両状況と、を入力して、自車両がこれから通過する事故多発地点の事故パターンと、自車両と他車両の状況が一致した場合に、各種警報や各車両制御を行う。または、前記パターンが一致した場合に、より強い警報や各車両制御を行う(詳細は後述する)。
【0012】
GPS受信機11は、複数のGPS衛星から発信された電波が受信機に到達するまでに要した時間と、GPS衛星の位置情報から、現在の車両の位置(経度緯度)を算出し、算出結果をハーネス2を介して制御装置1に出力する。
【0013】
VICS受信機12は、VICSセンターに集められた渋滞,混雑,規制や事故多発地点とその事故パターンといった様々な情報を、FM多重放送や、光ビーコン,電波ビーコンなどの方式で受信し、受信結果をハーネス2を介して制御装置1に出力する。VICS受信機12で受信する事故多発地点とその事故パターンの情報は表1のような情報を含んでいる。
【0014】
【表1】

【0015】
表1の緯度と経度は、事故多発地点を特定する座標情報であり、第1進行方向は過去の事故の第1当事者の進行方向であり、第1速度は第1当事者の速度である。第2進行方向は過去の事故の第2当事者の進行方向であり、第2速度は第2当事者の速度である。見通しは該事故多発地点に当事者同士が進入する際に該事故多発地点で時間的余裕をもって停止またはステアリングにより事故を回避できる場所から当事者同士が互いに見える場合には「良い」、そうではない場合は「悪い」を示す情報である。なお、この事故多発地点の情報は地図データ記録部18に記録しておいても良い。この見通し情報はあった方が好ましいが、なくても良い。
【0016】
車速センサ13は、磁気や光学を用いた回転を検出するセンサであり、車輪33の回転に伴いパルスを検出し、検出結果をハーネス2を介して制御装置1に出力する。
【0017】
ヨーレートセンサ14は、車両の進行方向を検出し、検出結果をハーネス2を介して制御装置1に出力する。自車両がトンネル内などを走行中の場合、GPS受信機11はGPS衛星の電波を受信できないが、車速センサ13による車速情報とヨーレートセンサ14による車両の進行方向により、制御装置1は自車両位置を求めることができる。このヨーレートセンサを設けることが好ましいが、車速センサ13だけ設けられていても良い。
【0018】
レーダ16は、レーザ式または電波式などであり、車両の前部などに取り付けられている。レーザビームまたは電波を前方に送出し、前方の車両や障害物,歩行者からの反射を受信することで、前方の車両や障害物、歩行者等の位置を検出し、検出結果をハーネス2を介して制御装置1に出力する。
【0019】
カメラ17は、CCDやCMOSなどを用いた画像センサを備えており、車室内前向きなどに取り付けられており、前方の車両や障害物,歩行者等の位置を検出し、検出結果をハーネス2を介して制御装置1に出力する。なお、本実施形態では、前方の車両や障害物,歩行者の位置を検出するセンサとして、レーダ16とカメラ17を用いているが、これは何れか一つでも良い。
【0020】
地図データ記録部18は、CDやDVD,HDDなどの記録媒体を用いて地図情報を記録しており、現在の車両付近の地図情報を制御装置1に出力する。
【0021】
表示部21は、液晶などを用いた表示装置であり、車室内運転手に向けて設置されており、ハーネス2を介した制御装置1の出力に従って、地図や自車両位置,警報を表示する。
【0022】
音声出力部22は、スピーカなどを用いた音声出力装置であり、車室内運転手に向けて設置されている。ハーネス2を介した制御装置1の出力に従って、警報を出力する。
【0023】
振動発生部23は、モータと偏芯オモリなどを用いた振動発生装置であり、車室内運転座席やステアリングホイールに設置されている。ハーネス2を介した制御装置1の出力に従って、警報時に振動を発生させる。なお、本実施形態では、運転者に警報する手段として表示部21と音声出力部22と振動発生部23を用いているが、これは何れかの組み合わせ、もしくは何れか一つでも良い。
【0024】
前照灯24は、白熱灯や放電管やLEDなどを用いた前方を照らすための灯火であり、車両前方に設置されている。ハーネス2を介した制御装置1の出力に従って、警報時に点滅、またはHiビームとLoビームを繰り返す。
【0025】
警笛25は、車両前方に設置されており、ハーネス2を介した制御装置1の出力に従って、警報時に警笛を行う。
【0026】
ブースタ26は、ハーネス2を介した制御装置1の出力に従って、油圧配管26aを介してブレーキ26bを駆動する装置である。ブレーキ26bは車輪33とともに回転するディスクやドラムに摩擦部材を押しつけて制動力を得る装置で、ハーネス2を介した制御装置1の出力に従って、警報時にブースタ26を駆動して、ブレーキを掛け、車輪33を介して自車両を減速する。このときのブースタ26の駆動は、実際に減速しなくとも、空走距離を短くするためにディスクと摩擦部材との隙間を減少またはゼロにする動作でも良いし、実際に減速しても良い。この際、エンジン31の吸気管31aに接続されているスロットル31bを駆動してエンジンブレーキを発生させ、車軸32と車輪33を介して自車両を減速してもよい。また、変速機をローギア側に変速させる信号を変速機制御装置に対して出力し、車両を減速させても良い。
【0027】
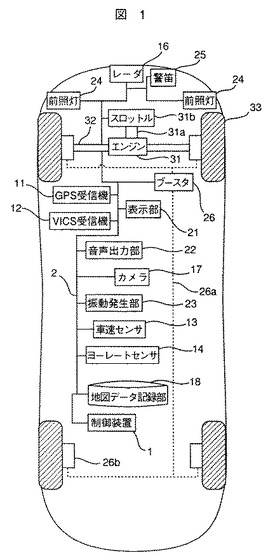
図2は、図1の構成における制御装置1の処理フローチャートを示す。
【0028】
車両が始動され、制御装置1の電源が入ると、ステップS11において、制御装置1は、GPS受信機11から自車両の位置を取得し、車速センサ13から車速を取得し、レーダ16やカメラ17から他車両や歩行者の位置と速度を取得し、VICS受信機12から自車両周辺の事故多発地点情報とその事故パターンを取得する。
【0029】
ステップS12において、制御装置1は、前回の自車両の位置と今回の自車両の位置の差分から、自車両の進行方向を算出し、前回の他車両や歩行者の位置と今回の他車両や歩行者の位置の差分からその進行方向を算出する。
【0030】
ステップS13において、制御装置1は、自車両の位置と速度と進行方向に基づき、所定時間内に自車両が今後走行する道路が事故多発地点である場合、ステップS14の処理を行い、それ以外の場合、ステップS23の処理を行う。
【0031】
ステップS14において、制御装置1は、該事故多発地点の見通しが悪い場合、ステップS22の処理を行い、それ以外の場合は、ステップS15の処理を行う。
【0032】
ステップS15において、制御装置1は、自車両の位置と速度と進行方向から該事故多発地点まで到達する時間(TTC)を算出し、他車両や歩行者の位置と速度と進行方向から事故多発地点まで到達する時間を算出し、それぞれの時間差が所定時間以内の場合、かつ、自車両と他車両や歩行者の速度と進行方向が事故パターンに一致した場合、ステップS16の処理を行い、それ以外の場合、ステップS23の処理を行う。
【0033】
制御装置1は、TTCにより、表2に示す処理を行う。
【0034】
【表2】
【0035】
ステップS16において、制御装置1は、TTCが2秒未満の場合、ステップS19の処理を行い、それ以外の場合ステップS17の処理を行う。
【0036】
ステップS17において、制御装置1は、TTCが3秒未満の場合、ステップS20の処理を行い、それ以外の場合、ステップS18の処理を行う。
【0037】
ステップS18において、制御装置1は、TTCが4秒未満の場合、ステップS21の処理を行い、それ以外の場合、ステップS22の処理を行う。
【0038】
ステップS19において、制御装置1は、スロットル31bを閉じて、ブースタ26を駆動して減速を行う。
【0039】
ステップS20において、制御装置1は、ブースタ26を駆動してディスクと摩擦部材との隙間をなくす。
【0040】
ステップS21において、制御装置1は、前照灯24や警笛25にて他車両や歩行者に自車両の存在を報知する。
【0041】
ステップS22において、制御装置1は、表示部21にて運転者に警報すべき車両や歩行者の情報を図形や文字で表示し、音声出力部22にて警報すべき車両や歩行者の情報を音声出力し、振動発生部23にて運転者に警報を振動にて知らせる。
【0042】
ステップS23において、制御装置1は、車両のイグニッションキーの状態を検出して、イグニッションOFFの場合は、処理を終了し、それ以外の場合、ステップS11の処理に戻る。
【0043】
ステップS11からステップS23の処理は前記の表1のように、同一地点で複数の事故パターンが存在する場合、それぞれの事故パターンについて、処理を行っても良い。
【0044】
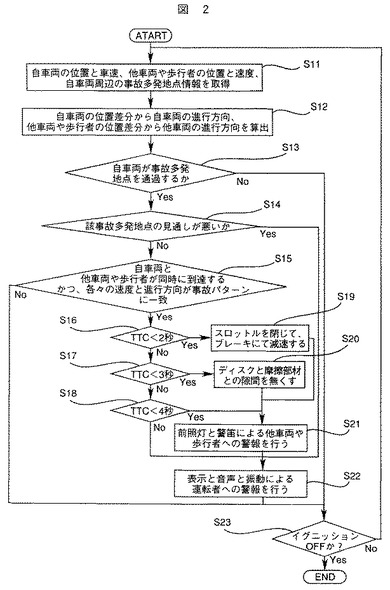
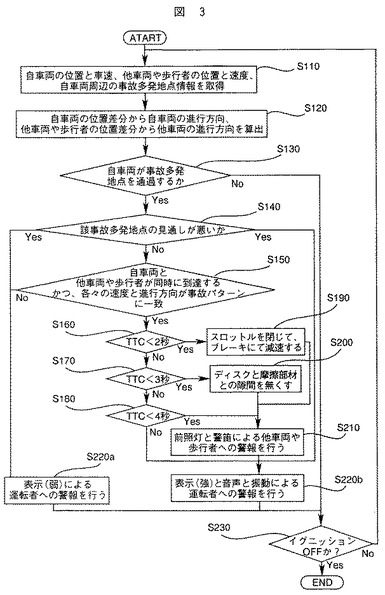
図3は、本発明の他の実施形態をなす制御装置1の処理フローチャートを示す。車両の構成ブロックは図1に示すものと同様である。
【0045】
車両が始動され、制御装置1の電源が入ると、ステップS110において、制御装置1は、GPS受信機11から自車両の位置を取得し、車速センサ13から車速を取得し、レーダ16やカメラ17から他車両や歩行者の位置と速度を取得し、VICS受信機12から自車両周辺の事故多発地点情報とその事故パターンを取得する。
【0046】
ステップS120において、制御装置1は、前回の自車両の位置と今回の自車両の位置の差分から、自車両の進行方向を算出し、前回の他車両や歩行者の位置と今回の他車両や歩行者の位置の差分からその進行方向を算出する。
【0047】
ステップS130において、制御装置1は、自車両の位置と速度と進行方向から所定時間内に自車両が今後走行する道路が事故多発地点である場合、ステップS140の処理を行い、それ以外の場合、ステップS230の処理を行う。
【0048】
ステップS140において、制御装置1は、該事故多発地点の見通しが悪い場合、ステップS220aの処理を行い、それ以外の場合、ステップS150の処理を行う。
【0049】
ステップS150において、制御装置1は、自車両の位置と速度と進行方向から該事故多発地点まで到達する時間(TTC)を算出し、他車両や歩行者の位置と速度と進行方向から事故多発地点まで到達する時間を算出し、それぞれの時間差が所定時間以内の場合、かつ、自車両と他車両や歩行者の速度と進行方向が事故パターンに一致した場合、ステップS160の処理を行い、それ以外の場合、ステップS220aの処理を行う。
【0050】
制御装置1はTTCにより、前述の表2に示す処理を行う。
【0051】
ステップS160において、制御装置1は、TTCが2秒未満の場合、ステップS190の処理を行い、それ以外の場合ステップS170の処理を行う。
【0052】
ステップS170において、制御装置1は、TTCが3秒未満の場合、ステップS200の処理を行い、それ以外の場合、ステップS180の処理を行う。
【0053】
ステップS180において、制御装置1は、TTCが4秒未満の場合、ステップS210の処理を行い、それ以外の場合、ステップS220の処理を行う。
【0054】
ステップS190において、制御装置1は、スロットル31bを閉じて、ブースタ26を駆動して減速を行う。
【0055】
ステップS200において、制御装置1は、ブースタ26を駆動してディスクと摩擦部材との隙間をなくす。
【0056】
ステップS210において、制御装置1は、前照灯24や警笛25にて他車両や歩行者に自車両の存在を報知する。
【0057】
ステップS220aにおいて、制御装置1は、表示部21にて運転者に警報すべき車両や歩行者の情報を図形や文字で表示する。
【0058】
ステップS220bにおいて、制御装置1は、表示部21にて運転者に警報すべき車両や歩行者の情報を図形や文字で表示し、音声出力部22にて警報すべき車両や歩行者の情報を音声出力し、振動発生部23にて運転者に警報を振動にて知らせる。なお、表示部
21の表示は、ステップS220aの場合は表示に黄色を用い、ステップS220bの場合は表示に赤色を用いる、または、ステップS220aに比べステップS220bの表示は大きくするなど、ステップS220bの表示を強調してもよい。
【0059】
ステップS230において、制御装置1は、車両のイグニッションキーの状態を検出して、イグニッションOFFの場合は、処理を終了し、それ以外の場合、ステップS110の処理に戻る。
【0060】
ステップS110からステップS230の処理は、前述の表1のように、同一地点で複数の事故パターンが存在する場合、それぞれの事故パターンについて、処理を行っても良い。
【0061】
このように上記の実施形態は、自車両の状況と、レーダやカメラによる他車両の状況と、事故多発地点の事故パターンが一致した場合のみ警報を行う。また、前記パターンが一致した場合、より強い警報を行う。また、前照灯や警笛にて他車両や歩行者に自車両の存在に気づかせる。また、ブレーキによる減速のための準備や、ブレーキによる実施の減速を行う。
【0062】
そのために、自車両の位置と速度と進行方向を算出する手段と、事故多発地点の情報を取得する手段と、他車両や歩行者の位置と速度と進行方向を検出する手段と、自車両が事故多発地点を通過する際に警報する手段と、を有する。そして、自車両が事故多発地点を通過する際に、自車両の位置と速度と進行方向から該事故多発地点まで到達する時間を算出し、他車両や歩行者の位置と速度と進行方向から事故多発地点まで到達する時間を算出し、それぞれの時間差が所定時間以内の場合、かつ、自車両と他車両や歩行者の速度と進行方向が事故多発地点の事故パターンに一致した場合、運転者に与える警報を変える。
【0063】
また、事故多発地点に当事者同士が進入する際に該事故多発地点で時間的余裕をもって停止またはステアリングにより事故を回避できる場所から当事者同士が互いに見えない場合では、必ず警報を出す。
【0064】
また、警報とともに前照灯や警笛を用いて他車両や歩行者に自車両の存在を知らせる。
【0065】
また、警報とともに減速装置を駆動して、ディスクやドラムと摩擦部材との隙間を無くす。
【0066】
また、警報とともにスロットルを閉じ、減速装置を駆動して、減速する。
【0067】
また、警報の際に、制御装置の動作を、自車両が事故多発地点に到達するまでの時間で切り替える。
【0068】
これにより、自車両の状況と、レーダやカメラによる他車両状況と、事故多発地点の事故パターンが一致した場合のみ警報を行うことができる。また、前記パターンが一致した場合、より強い警報を行うことにより、精度の高い警報を行える。さらに、精度の高い警報であるため、照灯や警笛にて他車両や歩行者に自車両の存在に気づかせたり、ブレーキを制御して車両がブレーキを掛ける準備を行う、もしくは車両を減速できる。
【図面の簡単な説明】
【0069】
【図1】本発明の一実施形態をなす車両のブロック構成図を示す。
【図2】図1の構成における制御装置1の処理フローチャートを示す。
【図3】本発明の他の実施形態をなす制御装置1の処理フローチャートを示す。
【符号の説明】
【0070】
1…制御装置、11…GPS受信機、12…VICS受信機、13…車速センサ、16…レーダ、17…カメラ、21…表示部、22…音声出力部、23…振動発生部、24…前照灯、25…警笛、26b…ブレーキ、31…エンジン、31b…スロットル。
【技術分野】
【0001】
本発明は、車両の制御装置および車両警報システムに係り、特に事故多発地点における警報動作に関する。
【背景技術】
【0002】
従来より、安全性向上のため、過去に発生した事故データに基づいて、車両が事故多発地点へ近づいた時に警報を行い、運転者へ注意喚起を行う走行情報提供装置が開発されている。これは、過去に発生した事故データを蓄積した事故多発地点情報を活用し、自車両が事故多発地点を通過する場合、警報を行うものである。
【0003】
例えば、過去に発生した事故統計データをその発生場所,事故原因,発生件数等とともに記憶しておき、記憶した道路地図情報と、車輪速センサ,GPSによる現在車両位置を比較し、車両が事故多発地点に到達しかかっていることを車室内に設置された表示装置,音声出力装置により運転者に報知し、注意を促す技術がある(例えば特許文献1参照)。
【0004】
【特許文献1】特開平04−309810号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし上記従来技術では、事故多発地点に差し掛かるたびに警報され、また、事故が起こりえない状況にあっても警報されるため、運転者が警報に慣れてしまい、警報があったとしても十分な注意を払わなくなってしまうという問題がある。
【0006】
そこで本発明は、運転者に対する事故多発地点の警報を効果的に与えることを目的とする。
【課題を解決するための手段】
【0007】
過去の事故等における車両挙動と、実際の自他車の車両挙動を比較し、その比較結果に応じて運転者への警報信号を出力する。
【発明の効果】
【0008】
本発明によれば、運転者に対し、事故多発地点での警報を効果的に与えることができる。
【発明を実施するための最良の形態】
【0009】
以下、図を用いて本発明の実施形態を説明する。
【0010】
図1は、本発明の一実施形態をなす車両のブロック構成図を示す。
【0011】
制御装置1は、マイクロコンピューターとその周辺部品を備え、GPS受信機11による自車両の位置と、車速センサ13による自車両の速度と、VICS受信機12による事故多発地点の情報と、レーダ16やカメラ17による他車両状況と、を入力して、自車両がこれから通過する事故多発地点の事故パターンと、自車両と他車両の状況が一致した場合に、各種警報や各車両制御を行う。または、前記パターンが一致した場合に、より強い警報や各車両制御を行う(詳細は後述する)。
【0012】
GPS受信機11は、複数のGPS衛星から発信された電波が受信機に到達するまでに要した時間と、GPS衛星の位置情報から、現在の車両の位置(経度緯度)を算出し、算出結果をハーネス2を介して制御装置1に出力する。
【0013】
VICS受信機12は、VICSセンターに集められた渋滞,混雑,規制や事故多発地点とその事故パターンといった様々な情報を、FM多重放送や、光ビーコン,電波ビーコンなどの方式で受信し、受信結果をハーネス2を介して制御装置1に出力する。VICS受信機12で受信する事故多発地点とその事故パターンの情報は表1のような情報を含んでいる。
【0014】
【表1】
【0015】
表1の緯度と経度は、事故多発地点を特定する座標情報であり、第1進行方向は過去の事故の第1当事者の進行方向であり、第1速度は第1当事者の速度である。第2進行方向は過去の事故の第2当事者の進行方向であり、第2速度は第2当事者の速度である。見通しは該事故多発地点に当事者同士が進入する際に該事故多発地点で時間的余裕をもって停止またはステアリングにより事故を回避できる場所から当事者同士が互いに見える場合には「良い」、そうではない場合は「悪い」を示す情報である。なお、この事故多発地点の情報は地図データ記録部18に記録しておいても良い。この見通し情報はあった方が好ましいが、なくても良い。
【0016】
車速センサ13は、磁気や光学を用いた回転を検出するセンサであり、車輪33の回転に伴いパルスを検出し、検出結果をハーネス2を介して制御装置1に出力する。
【0017】
ヨーレートセンサ14は、車両の進行方向を検出し、検出結果をハーネス2を介して制御装置1に出力する。自車両がトンネル内などを走行中の場合、GPS受信機11はGPS衛星の電波を受信できないが、車速センサ13による車速情報とヨーレートセンサ14による車両の進行方向により、制御装置1は自車両位置を求めることができる。このヨーレートセンサを設けることが好ましいが、車速センサ13だけ設けられていても良い。
【0018】
レーダ16は、レーザ式または電波式などであり、車両の前部などに取り付けられている。レーザビームまたは電波を前方に送出し、前方の車両や障害物,歩行者からの反射を受信することで、前方の車両や障害物、歩行者等の位置を検出し、検出結果をハーネス2を介して制御装置1に出力する。
【0019】
カメラ17は、CCDやCMOSなどを用いた画像センサを備えており、車室内前向きなどに取り付けられており、前方の車両や障害物,歩行者等の位置を検出し、検出結果をハーネス2を介して制御装置1に出力する。なお、本実施形態では、前方の車両や障害物,歩行者の位置を検出するセンサとして、レーダ16とカメラ17を用いているが、これは何れか一つでも良い。
【0020】
地図データ記録部18は、CDやDVD,HDDなどの記録媒体を用いて地図情報を記録しており、現在の車両付近の地図情報を制御装置1に出力する。
【0021】
表示部21は、液晶などを用いた表示装置であり、車室内運転手に向けて設置されており、ハーネス2を介した制御装置1の出力に従って、地図や自車両位置,警報を表示する。
【0022】
音声出力部22は、スピーカなどを用いた音声出力装置であり、車室内運転手に向けて設置されている。ハーネス2を介した制御装置1の出力に従って、警報を出力する。
【0023】
振動発生部23は、モータと偏芯オモリなどを用いた振動発生装置であり、車室内運転座席やステアリングホイールに設置されている。ハーネス2を介した制御装置1の出力に従って、警報時に振動を発生させる。なお、本実施形態では、運転者に警報する手段として表示部21と音声出力部22と振動発生部23を用いているが、これは何れかの組み合わせ、もしくは何れか一つでも良い。
【0024】
前照灯24は、白熱灯や放電管やLEDなどを用いた前方を照らすための灯火であり、車両前方に設置されている。ハーネス2を介した制御装置1の出力に従って、警報時に点滅、またはHiビームとLoビームを繰り返す。
【0025】
警笛25は、車両前方に設置されており、ハーネス2を介した制御装置1の出力に従って、警報時に警笛を行う。
【0026】
ブースタ26は、ハーネス2を介した制御装置1の出力に従って、油圧配管26aを介してブレーキ26bを駆動する装置である。ブレーキ26bは車輪33とともに回転するディスクやドラムに摩擦部材を押しつけて制動力を得る装置で、ハーネス2を介した制御装置1の出力に従って、警報時にブースタ26を駆動して、ブレーキを掛け、車輪33を介して自車両を減速する。このときのブースタ26の駆動は、実際に減速しなくとも、空走距離を短くするためにディスクと摩擦部材との隙間を減少またはゼロにする動作でも良いし、実際に減速しても良い。この際、エンジン31の吸気管31aに接続されているスロットル31bを駆動してエンジンブレーキを発生させ、車軸32と車輪33を介して自車両を減速してもよい。また、変速機をローギア側に変速させる信号を変速機制御装置に対して出力し、車両を減速させても良い。
【0027】
図2は、図1の構成における制御装置1の処理フローチャートを示す。
【0028】
車両が始動され、制御装置1の電源が入ると、ステップS11において、制御装置1は、GPS受信機11から自車両の位置を取得し、車速センサ13から車速を取得し、レーダ16やカメラ17から他車両や歩行者の位置と速度を取得し、VICS受信機12から自車両周辺の事故多発地点情報とその事故パターンを取得する。
【0029】
ステップS12において、制御装置1は、前回の自車両の位置と今回の自車両の位置の差分から、自車両の進行方向を算出し、前回の他車両や歩行者の位置と今回の他車両や歩行者の位置の差分からその進行方向を算出する。
【0030】
ステップS13において、制御装置1は、自車両の位置と速度と進行方向に基づき、所定時間内に自車両が今後走行する道路が事故多発地点である場合、ステップS14の処理を行い、それ以外の場合、ステップS23の処理を行う。
【0031】
ステップS14において、制御装置1は、該事故多発地点の見通しが悪い場合、ステップS22の処理を行い、それ以外の場合は、ステップS15の処理を行う。
【0032】
ステップS15において、制御装置1は、自車両の位置と速度と進行方向から該事故多発地点まで到達する時間(TTC)を算出し、他車両や歩行者の位置と速度と進行方向から事故多発地点まで到達する時間を算出し、それぞれの時間差が所定時間以内の場合、かつ、自車両と他車両や歩行者の速度と進行方向が事故パターンに一致した場合、ステップS16の処理を行い、それ以外の場合、ステップS23の処理を行う。
【0033】
制御装置1は、TTCにより、表2に示す処理を行う。
【0034】
【表2】
【0035】
ステップS16において、制御装置1は、TTCが2秒未満の場合、ステップS19の処理を行い、それ以外の場合ステップS17の処理を行う。
【0036】
ステップS17において、制御装置1は、TTCが3秒未満の場合、ステップS20の処理を行い、それ以外の場合、ステップS18の処理を行う。
【0037】
ステップS18において、制御装置1は、TTCが4秒未満の場合、ステップS21の処理を行い、それ以外の場合、ステップS22の処理を行う。
【0038】
ステップS19において、制御装置1は、スロットル31bを閉じて、ブースタ26を駆動して減速を行う。
【0039】
ステップS20において、制御装置1は、ブースタ26を駆動してディスクと摩擦部材との隙間をなくす。
【0040】
ステップS21において、制御装置1は、前照灯24や警笛25にて他車両や歩行者に自車両の存在を報知する。
【0041】
ステップS22において、制御装置1は、表示部21にて運転者に警報すべき車両や歩行者の情報を図形や文字で表示し、音声出力部22にて警報すべき車両や歩行者の情報を音声出力し、振動発生部23にて運転者に警報を振動にて知らせる。
【0042】
ステップS23において、制御装置1は、車両のイグニッションキーの状態を検出して、イグニッションOFFの場合は、処理を終了し、それ以外の場合、ステップS11の処理に戻る。
【0043】
ステップS11からステップS23の処理は前記の表1のように、同一地点で複数の事故パターンが存在する場合、それぞれの事故パターンについて、処理を行っても良い。
【0044】
図3は、本発明の他の実施形態をなす制御装置1の処理フローチャートを示す。車両の構成ブロックは図1に示すものと同様である。
【0045】
車両が始動され、制御装置1の電源が入ると、ステップS110において、制御装置1は、GPS受信機11から自車両の位置を取得し、車速センサ13から車速を取得し、レーダ16やカメラ17から他車両や歩行者の位置と速度を取得し、VICS受信機12から自車両周辺の事故多発地点情報とその事故パターンを取得する。
【0046】
ステップS120において、制御装置1は、前回の自車両の位置と今回の自車両の位置の差分から、自車両の進行方向を算出し、前回の他車両や歩行者の位置と今回の他車両や歩行者の位置の差分からその進行方向を算出する。
【0047】
ステップS130において、制御装置1は、自車両の位置と速度と進行方向から所定時間内に自車両が今後走行する道路が事故多発地点である場合、ステップS140の処理を行い、それ以外の場合、ステップS230の処理を行う。
【0048】
ステップS140において、制御装置1は、該事故多発地点の見通しが悪い場合、ステップS220aの処理を行い、それ以外の場合、ステップS150の処理を行う。
【0049】
ステップS150において、制御装置1は、自車両の位置と速度と進行方向から該事故多発地点まで到達する時間(TTC)を算出し、他車両や歩行者の位置と速度と進行方向から事故多発地点まで到達する時間を算出し、それぞれの時間差が所定時間以内の場合、かつ、自車両と他車両や歩行者の速度と進行方向が事故パターンに一致した場合、ステップS160の処理を行い、それ以外の場合、ステップS220aの処理を行う。
【0050】
制御装置1はTTCにより、前述の表2に示す処理を行う。
【0051】
ステップS160において、制御装置1は、TTCが2秒未満の場合、ステップS190の処理を行い、それ以外の場合ステップS170の処理を行う。
【0052】
ステップS170において、制御装置1は、TTCが3秒未満の場合、ステップS200の処理を行い、それ以外の場合、ステップS180の処理を行う。
【0053】
ステップS180において、制御装置1は、TTCが4秒未満の場合、ステップS210の処理を行い、それ以外の場合、ステップS220の処理を行う。
【0054】
ステップS190において、制御装置1は、スロットル31bを閉じて、ブースタ26を駆動して減速を行う。
【0055】
ステップS200において、制御装置1は、ブースタ26を駆動してディスクと摩擦部材との隙間をなくす。
【0056】
ステップS210において、制御装置1は、前照灯24や警笛25にて他車両や歩行者に自車両の存在を報知する。
【0057】
ステップS220aにおいて、制御装置1は、表示部21にて運転者に警報すべき車両や歩行者の情報を図形や文字で表示する。
【0058】
ステップS220bにおいて、制御装置1は、表示部21にて運転者に警報すべき車両や歩行者の情報を図形や文字で表示し、音声出力部22にて警報すべき車両や歩行者の情報を音声出力し、振動発生部23にて運転者に警報を振動にて知らせる。なお、表示部
21の表示は、ステップS220aの場合は表示に黄色を用い、ステップS220bの場合は表示に赤色を用いる、または、ステップS220aに比べステップS220bの表示は大きくするなど、ステップS220bの表示を強調してもよい。
【0059】
ステップS230において、制御装置1は、車両のイグニッションキーの状態を検出して、イグニッションOFFの場合は、処理を終了し、それ以外の場合、ステップS110の処理に戻る。
【0060】
ステップS110からステップS230の処理は、前述の表1のように、同一地点で複数の事故パターンが存在する場合、それぞれの事故パターンについて、処理を行っても良い。
【0061】
このように上記の実施形態は、自車両の状況と、レーダやカメラによる他車両の状況と、事故多発地点の事故パターンが一致した場合のみ警報を行う。また、前記パターンが一致した場合、より強い警報を行う。また、前照灯や警笛にて他車両や歩行者に自車両の存在に気づかせる。また、ブレーキによる減速のための準備や、ブレーキによる実施の減速を行う。
【0062】
そのために、自車両の位置と速度と進行方向を算出する手段と、事故多発地点の情報を取得する手段と、他車両や歩行者の位置と速度と進行方向を検出する手段と、自車両が事故多発地点を通過する際に警報する手段と、を有する。そして、自車両が事故多発地点を通過する際に、自車両の位置と速度と進行方向から該事故多発地点まで到達する時間を算出し、他車両や歩行者の位置と速度と進行方向から事故多発地点まで到達する時間を算出し、それぞれの時間差が所定時間以内の場合、かつ、自車両と他車両や歩行者の速度と進行方向が事故多発地点の事故パターンに一致した場合、運転者に与える警報を変える。
【0063】
また、事故多発地点に当事者同士が進入する際に該事故多発地点で時間的余裕をもって停止またはステアリングにより事故を回避できる場所から当事者同士が互いに見えない場合では、必ず警報を出す。
【0064】
また、警報とともに前照灯や警笛を用いて他車両や歩行者に自車両の存在を知らせる。
【0065】
また、警報とともに減速装置を駆動して、ディスクやドラムと摩擦部材との隙間を無くす。
【0066】
また、警報とともにスロットルを閉じ、減速装置を駆動して、減速する。
【0067】
また、警報の際に、制御装置の動作を、自車両が事故多発地点に到達するまでの時間で切り替える。
【0068】
これにより、自車両の状況と、レーダやカメラによる他車両状況と、事故多発地点の事故パターンが一致した場合のみ警報を行うことができる。また、前記パターンが一致した場合、より強い警報を行うことにより、精度の高い警報を行える。さらに、精度の高い警報であるため、照灯や警笛にて他車両や歩行者に自車両の存在に気づかせたり、ブレーキを制御して車両がブレーキを掛ける準備を行う、もしくは車両を減速できる。
【図面の簡単な説明】
【0069】
【図1】本発明の一実施形態をなす車両のブロック構成図を示す。
【図2】図1の構成における制御装置1の処理フローチャートを示す。
【図3】本発明の他の実施形態をなす制御装置1の処理フローチャートを示す。
【符号の説明】
【0070】
1…制御装置、11…GPS受信機、12…VICS受信機、13…車速センサ、16…レーダ、17…カメラ、21…表示部、22…音声出力部、23…振動発生部、24…前照灯、25…警笛、26b…ブレーキ、31…エンジン、31b…スロットル。
【特許請求の範囲】
【請求項1】
事故多発地点における、自車位置情報,自車走行状態,他車位置情報,他車走行状態を含む事故多発情報をVICS受信機から入手する事故多発情報入手手段と、
GPS受信機から入手した自車位置情報,車速センサから入手した自車走行状態、及びレーダまたはカメラの少なくともいずれか一方からの情報に基づき求めた他車位置情報及び他車走行状態を入手する自他車状況入手手段と、
前記事故多発情報入手手段で入手した事故多発地点の自車位置情報,自車走行状態,他車位置情報,他車走行状態と、前記自他車状況把握手段で入手した自車位置情報,自車走行状態,他車位置情報,他車走行状態とを比較する比較手段と、
前記比較手段の結果に応じて、運転者への警報信号を出力する警報信号出力手段と、
を有する車両の制御装置。
【請求項2】
請求項1に記載の車両の制御装置であって、
前記警報信号出力手段は、前記事故多発情報入手手段で入手した自車位置情報,自車走行状態,他車位置情報,他車走行状態に対して、前記自他車状況把握手段で入手した自車位置情報,自車走行状態,他車位置情報,他車走行状態が一致または含まれると前記比較手段で判断された場合に、運転者への警報信号を出力し、一致または含まれると判断されなかった場合には、運転者への警報信号を出力しない車両の制御装置。
【請求項3】
請求項1または2のいずれかに記載の車両の制御装置であって、
前記比較手段は、前記事故多発情報入手手段で入手した自車位置情報,自車走行状態,他車位置情報,他車走行状態に対して、前記自他車状況把握手段で入手した自車位置情報,自車走行状態,他車位置情報,他車走行状態が将来一致または将来含まれることをもって、一致または含まれると判断する車両の制御装置。
【請求項4】
請求項1乃至3のいずれかに記載の車両の制御装置であって、
前記事故多発情報入手手段は、当該事故多発地点の見通しの程度情報をさらに含み、
前記警報信号出力手段は、前記見通しの程度情報に基づいて、運転者への警報信号を出力する車両の制御装置。
【請求項5】
請求項2記載の車両の制御装置であって、
前記警報信号出力手段は、前記事故多発情報入手手段で入手した自車位置情報,自車走行状態,他車位置情報,他車走行状態に対して、前記自他車状況入手手段で入手した自車位置情報,自車走行状態,他車位置情報,他車走行状態が一致または含まれると前記比較手段で判断された場合に、運転者への警報を行うと共に、
前記自他車状況入手手段で入手した自車位置情報及び自車走行状態に基づき前記事故多発地点まで自車が到達する到達時間を算出し、当該到達時間に応じて、車両の挙動を変化させる制御信号を出力する車両の制御装置。
【請求項6】
請求項5記載の車両の制御装置であって、
前記指令信号は、前照灯または警笛の少なくともいずれか一方の制御信号である車両の制御装置。
【請求項7】
請求項5記載の車両の制御装置であって、
前記指令信号は、減速装置の制御信号である車両の制御装置。
【請求項8】
請求項5記載の車両の制御装置であって、
前記指令信号は、スロットルの制御信号である車両の制御装置。
【請求項9】
自車の進行方向,速度、及び自車走行地点を求める自車走行状態決定手段と、
他車の進行方向,速度、及び他車走行地点を求める他車走行状態決定手段と、
前記自車走行状態決定手段で求めた自車の走行地点に関連する、自車進行方向,自車走行地点,他車進行方向,他車走行地点を含む事故多発情報を入手する事故多発情報入手手段と、
前記事故多発情報入手手段から入手した前記事故多発情報の前記自車走行地点,前記自車走行状態,前記他車走行地点、及び前記他車走行状態と、前記自車走行状態決定手段及び前記他車走行状態決定手段から入手した前記自車走行地点,前記自車走行状態,前記他車走行地点、及び前記他車走行状態とを比較する比較手段と、
前記比較手段の比較結果に基づき、運転者への報知の方法を変更する運転者報知手段と、
を有する車両警報システム。
【請求項1】
事故多発地点における、自車位置情報,自車走行状態,他車位置情報,他車走行状態を含む事故多発情報をVICS受信機から入手する事故多発情報入手手段と、
GPS受信機から入手した自車位置情報,車速センサから入手した自車走行状態、及びレーダまたはカメラの少なくともいずれか一方からの情報に基づき求めた他車位置情報及び他車走行状態を入手する自他車状況入手手段と、
前記事故多発情報入手手段で入手した事故多発地点の自車位置情報,自車走行状態,他車位置情報,他車走行状態と、前記自他車状況把握手段で入手した自車位置情報,自車走行状態,他車位置情報,他車走行状態とを比較する比較手段と、
前記比較手段の結果に応じて、運転者への警報信号を出力する警報信号出力手段と、
を有する車両の制御装置。
【請求項2】
請求項1に記載の車両の制御装置であって、
前記警報信号出力手段は、前記事故多発情報入手手段で入手した自車位置情報,自車走行状態,他車位置情報,他車走行状態に対して、前記自他車状況把握手段で入手した自車位置情報,自車走行状態,他車位置情報,他車走行状態が一致または含まれると前記比較手段で判断された場合に、運転者への警報信号を出力し、一致または含まれると判断されなかった場合には、運転者への警報信号を出力しない車両の制御装置。
【請求項3】
請求項1または2のいずれかに記載の車両の制御装置であって、
前記比較手段は、前記事故多発情報入手手段で入手した自車位置情報,自車走行状態,他車位置情報,他車走行状態に対して、前記自他車状況把握手段で入手した自車位置情報,自車走行状態,他車位置情報,他車走行状態が将来一致または将来含まれることをもって、一致または含まれると判断する車両の制御装置。
【請求項4】
請求項1乃至3のいずれかに記載の車両の制御装置であって、
前記事故多発情報入手手段は、当該事故多発地点の見通しの程度情報をさらに含み、
前記警報信号出力手段は、前記見通しの程度情報に基づいて、運転者への警報信号を出力する車両の制御装置。
【請求項5】
請求項2記載の車両の制御装置であって、
前記警報信号出力手段は、前記事故多発情報入手手段で入手した自車位置情報,自車走行状態,他車位置情報,他車走行状態に対して、前記自他車状況入手手段で入手した自車位置情報,自車走行状態,他車位置情報,他車走行状態が一致または含まれると前記比較手段で判断された場合に、運転者への警報を行うと共に、
前記自他車状況入手手段で入手した自車位置情報及び自車走行状態に基づき前記事故多発地点まで自車が到達する到達時間を算出し、当該到達時間に応じて、車両の挙動を変化させる制御信号を出力する車両の制御装置。
【請求項6】
請求項5記載の車両の制御装置であって、
前記指令信号は、前照灯または警笛の少なくともいずれか一方の制御信号である車両の制御装置。
【請求項7】
請求項5記載の車両の制御装置であって、
前記指令信号は、減速装置の制御信号である車両の制御装置。
【請求項8】
請求項5記載の車両の制御装置であって、
前記指令信号は、スロットルの制御信号である車両の制御装置。
【請求項9】
自車の進行方向,速度、及び自車走行地点を求める自車走行状態決定手段と、
他車の進行方向,速度、及び他車走行地点を求める他車走行状態決定手段と、
前記自車走行状態決定手段で求めた自車の走行地点に関連する、自車進行方向,自車走行地点,他車進行方向,他車走行地点を含む事故多発情報を入手する事故多発情報入手手段と、
前記事故多発情報入手手段から入手した前記事故多発情報の前記自車走行地点,前記自車走行状態,前記他車走行地点、及び前記他車走行状態と、前記自車走行状態決定手段及び前記他車走行状態決定手段から入手した前記自車走行地点,前記自車走行状態,前記他車走行地点、及び前記他車走行状態とを比較する比較手段と、
前記比較手段の比較結果に基づき、運転者への報知の方法を変更する運転者報知手段と、
を有する車両警報システム。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2007−47953(P2007−47953A)
【公開日】平成19年2月22日(2007.2.22)
【国際特許分類】
【出願番号】特願2005−230241(P2005−230241)
【出願日】平成17年8月9日(2005.8.9)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成19年2月22日(2007.2.22)
【国際特許分類】
【出願日】平成17年8月9日(2005.8.9)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]