
車両の制御装置
【課題】他車両の周囲の障害物の有無に基づいて、自車両の挙動を制御することの可能な車両の制御装置を提供すること。
【解決手段】外部情報検出装置により他車両の自動変速機のシフト情報を検出するシフト情報検出手段(ステップS11,S12)と、他車両の自動変速機のマニュアルダウンシフトが検出された場合に、自車両の自動変速機の変速段を他車両の自動変速機の変速段と同一の変速段までダウンシフトすれば所定の車間距離を維持できるか否かを判断し、肯定された場合には、自車両の自動変速機の変速段を他車両の自動変速機の変速段と同一の変速段にダウンシフトし、否定判断された場合には、自車両の自動変速機の変速段を他車両の自動変速機の変速段よりも1段高い変速段にダウンシフトするとともに、他車両の減速を自車両の運転者に警告する挙動制御手段(ステップS13〜S15)とを備えている。
【解決手段】外部情報検出装置により他車両の自動変速機のシフト情報を検出するシフト情報検出手段(ステップS11,S12)と、他車両の自動変速機のマニュアルダウンシフトが検出された場合に、自車両の自動変速機の変速段を他車両の自動変速機の変速段と同一の変速段までダウンシフトすれば所定の車間距離を維持できるか否かを判断し、肯定された場合には、自車両の自動変速機の変速段を他車両の自動変速機の変速段と同一の変速段にダウンシフトし、否定判断された場合には、自車両の自動変速機の変速段を他車両の自動変速機の変速段よりも1段高い変速段にダウンシフトするとともに、他車両の減速を自車両の運転者に警告する挙動制御手段(ステップS13〜S15)とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、自車両の周囲に位置する他車両の情報を、他車両に搭載されている検出装置を介して自車両で検出し、検出された情報に基づいて自車両の挙動を制御することの可能な車両の制御装置に関するものである。
【背景技術】
【0002】
一般に、車両には原動機や変速機などの挙動制御装置が搭載されており、これらの挙動制御装置は、運転者の操作により制御される場合と、各種のセンサにより検出される走行状態に基づいて自動的に制御される場合とがある。
【0003】
しかしながら、上記制御はいずれも具体的な道路状況に遭遇してから実行されるため、道路状況に対する挙動制御装置の制御が後手に回りやすく、ドライバビリティが低下する場合が生じる。
【0004】
一方、近年はナビゲーションシステムの発達により、自車両の周囲の状況を事前に検出し、検出結果に基づいて原動機や自動変速機を制御することで、車両の挙動を所期の状態に制御する発明がなされている。
【0005】
このような車両の制御装置の一例が特許文献1に記載されている。この特許文献1に記載された車両の制御装置は、前方に存在する他車両からの情報を受信する手段と、自車両内に存在する各種コントローラと接続された走行情報処理手段とを備えている。
【0006】
上記車両の制御装置によれば、自車両と他車両との間で前方車の位置情報、急ブレーキの情報、スリップ路面の存在情報などが交信され、各種の情報に基づいて自車両のコントローラが制御され、道路状況など周囲の状況に即した走行が可能になる。
【0007】
【特許文献1】特開平5−266399号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上記公報に記載された車両の制御装置においては、他車両の具体的な状態、例えば他車両に搭載された自動変速機のマニュアルシフト操作の有無が考慮されていないため、他車両の自動変速機がマニュアルシフト操作された状態における自車両と他車両との相対関係が不適切になり、ドライバビリティが低下する可能性があった。
【0009】
この発明は、上記事情を背景としてなされたもので、他車両に搭載された自動変速機のマニュアルシフト操作の有無に基づいて、自車両の挙動を制御することの可能な車両の制御装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
上記目的を達成するため請求項1の発明は、自車両の挙動を制御する挙動制御装置と、他車両の情報を当該他車両に搭載されている検出装置を介して検出する外部情報検出装置とを備え、この外部情報検出装置により検出された情報に基づいて前記挙動制御装置の制御が行われる車両の制御装置において、前記外部情報検出装置により前記他車両の自動変速機のシフト情報を検出するシフト情報検出手段と、このシフト情報検出手段により前記他車両の自動変速機のマニュアルダウンシフトが検出された場合に、前記自車両の自動変速機の変速段を前記他車両の自動変速機の変速段と同一の変速段までダウンシフトすれば所定の車間距離を維持できるか否かを判断し、肯定された場合には、前記自車両の自動変速機の変速段を前記他車両の自動変速機の変速段と同一の変速段にダウンシフトし、否定判断された場合には、前記自車両の自動変速機の変速段を前記他車両の自動変速機の変速段よりも1段高い変速段にダウンシフトするとともに前記他車両の減速を前記自車両の運転者に警告する挙動制御手段とを備えていることを特徴とする。
【0011】
また、請求項2の発明は、請求項1の発明において、前記外部情報検出装置により前記他車両のエンジン回転数を検出するエンジン回転数検出手段を更に備え、前記挙動制御手段は、前記シフト情報検出手段により前記他車両の自動変速機のマニュアルダウンシフトが検出され、かつ前記エンジン回転数検出手段により検出された前記他車両のエンジン回転数が所定値よりも大きい場合に、前記自車両をブレーキ装置の制動力により減速制御する手段を含むことを特徴とする。
【発明の効果】
【0012】
したがって、請求項1の発明によれば、他車両の自動変速機がマニュアルダウンシフト操作されたことが自車両の外部情報検出装置により検出されると、他車両の自動変速機の変速段と同一の変速段まで自車両の自動変速機をダウンシフトすれば所定の車間距離を維持できるか否かが判断される。これは、自車両の自動変速機の減速度と、他車両の自動変速機の減速度とが同一であるとは限らないため、両者の減速度に基づいて所定の車間距離を維持できるように自車両の減速度を制御するためである。そして、肯定判断された場合、すなわち他車両の自動変速機の変速段と同一の変速段まで自車両の自動変速機をダウンシフトすれば所定の車間距離を維持できると判断された場合は、自車両の自動変速機が他車両の自動変速機と同一の変速段にダウンシフトされ、自車両のエンジンブレーキが強められて減速される。一方、否定判断された場合、すなわち他車両の自動変速機の変速段と同一の変速段まで自車両の自動変速機をダウンシフトさせなくとも所定の車間距離を維持可能と判断された場合には、自車両の自動変速機が他車両よりも1段高い変速段にダウンシフトされて自車両が減速され、他車両の減速が自車両の運転者に警告される。したがって、自車両の駆動力を他車両の駆動力に対応させて変化させ、自車両と他車両との車間距離を所期の状態に維持することができ、ドライバビリティが向上する。
【0013】
また、請求項2の発明によれば、他車両のダウンシフト後におけるエンジン回転数が所定値を超えていると判断された場合は、他車両に強いエンジンブレーキ力が生じて急激な減速が予想されるため、自車両をブレーキ装置の制動力により減速させる制御が行われる。したがって、自車両の駆動力を他車両の駆動力に対応させて変化させ、自車両と他車両との車間距離を所期の状態に維持することができ、ドライバビリティが向上する。
【発明を実施するための最良の形態】
【0014】
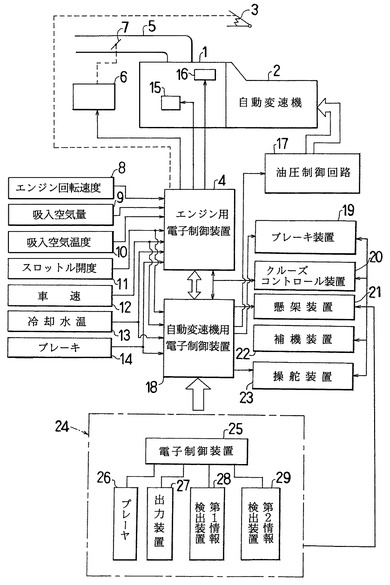
つぎにこの発明を図を参照してより具体的に説明する。図7は、この発明を適用した車両のシステムを示すブロック図であり、車両には駆動力源としてのエンジン1が搭載され、エンジン1の出力側には自動変速機2が接続されている。そして、運転者により操作されるアクセルペダル3の操作信号がエンジン用電子制御装置4に入力されている。
【0015】
また、エンジン1の吸気配管5には、スロットルアクチュエータ6によって駆動される電子スロットルバルブ7が設けられている。そして、アクセルペダル3の踏み込み量に応じてエンジン用電子制御装置4からスロットルアクチュエータ6に制御信号が出力され、その制御量に応じて電子スロットルバルブ7の開度が制御されるようになっている。
【0016】
エンジン1を制御するためのエンジン用電子制御装置4は、中央演算処理装置(CPU)および記憶装置(RAM,ROM)ならびに入出力インターフェースを主体とするマイクロコンピュータにより構成されている。
【0017】
このエンジン用電子制御装置4には、上記のアクセルペダル3の踏み込み量に応じた信号に加えて、エンジン回転速度センサ8の出力信号、吸入空気量センサ(エアーフローメータ)9の出力信号、吸入空気温度センサ10の出力信号、電子スロットルバルブ7の開度を検出するスロットル開度センサ11の出力信号、自動変速機2の出力軸回転数、言い換えれば車速を検出する車速センサ12の出力信号、冷却水温度センサ13の出力信号、ブレーキペダルのオン・オフを検出するブレーキスイッチ14の出力信号などが制御データとして入力される。
【0018】
また、エンジン用電子制御装置4は、上記のスロットルアクチュエータ6の制御に加えて、自動変速機2の変速時に、燃料噴射装置15や点火時期を変更するイグナイタ16などに信号を出力するように構成されている。さらに、エンジン用電子制御装置4には、後述するナビゲーションシステムやクルーズコントロール装置からも信号が入力され、これらの入力信号に基づいてスロットルアクチュエータ6、燃料噴射装置15、イグナイタ16などに制御信号を出力するように構成されている。
【0019】
一方、有段変速式の自動変速機2は、トルクコンバータ、ロックアップクラッチ、歯車変速機構、摩擦係合装置などの公知の構造を備えている。自動変速機2の各摩擦係合装置およびロックアップクラッチに作用する油圧は油圧制御回路17により電気的に制御される。油圧制御回路17は、シフトソレノイドバルブやリニアソレノイドバルブを備えている。
【0020】
そして、油圧制御回路17の各ソレノイドバルブに制御信号を出力する自動変速機用電子制御装置18が設けられている。この自動変速機用電子制御装置18は、エンジン用電子制御装置4と同様に、中央演算処理装置(CPU)および記憶装置(RAM,ROM)ならびに入出力インターフェースを主体とするものである。したがって、必要に応じてエンジン用電子制御装置4と自動変速機用電子制御装置18とを統合・一体化することができる。
【0021】
この自動変速機用電子制御装置18は、予め記憶している変速マップや演算式に従って入力データに基づく演算を行い、演算結果に基づいた制御信号を前記各ソレノイドバルブに出力し、変速段の設定、変速時における摩擦係合装置の係合・解放の制御、あるいはロックアップクラッチの係合・解放の制御ならびに変速時の過渡油圧の制御などを実行するように構成されている。さらに自動変速機用電子制御装置18は、後述するナビゲーションシステムにより検出されるデータに基づいて自動変速機2を制御する信号を出力するように構成されている。
【0022】
上記エンジン用電子制御装置4と自動変速機用電子制御装置18とは、相互にデータ通信可能に接続されており、自動変速機用電子制御装置18には、制御データとして、上記のアクセルペダル3の操作信号、スロットル開度センサ11の出力信号、車速センサ12の出力信号、冷却水温度センサ13の出力信号、ブレーキスイッチ14の出力信号などが入力されている。また、自動変速機用電子制御装置18からは、各変速段を設定する信号がエンジン用電子制御装置4に送信されている。
【0023】
一方、ブレーキ装置19には、運転者により操作されるブレーキペダル、ブレーキペダルの踏み込み力を油圧に変換するマスターシリンダ、マスターシリンダの油圧が作用するホイールシリンダ、ホイールシリンダに作用する油圧を電気的に制御するソレノイドバルブ、各車輪の回転速度を検出する回転速度センサなどが含まれる。このブレーキ装置19は、ブレーキペダルの操作によりホイールシリンダに油圧が供給されて制動力を生じる機能と、回転速度センサや自動変速機用電子制御装置18またはエンジン用電子制御装置4から転送される信号に基づいてホイールシリンダに油圧を供給する機能とを備えている。
【0024】
また、クルーズコントロール装置20は、エンジン1および自動変速機2を制御して車両を定速走行させるためのもので、車速の設定、解除、復帰などの制御が行われる。クルーズコントロール装置20の信号はエンジン用電子制御装置4および自動変速機用電子制御装置18に入力され、アクセルペダル3を踏み込まなくても電子スロットルバルブ7の開度が制御され、車速を自動的に一定に維持することが可能である。なお、定速走行制御の実行中にアクセルペダル3、ブレーキペダル、自動変速機2のシフトレバー、パーキングレバーが操作された場合にも、定速走行制御が解除されるように構成されている。
【0025】
懸架装置21は車体を支持し、かつ、車体の振動や操縦安定性などの挙動を制御するためのもので、懸架装置21はショックアブソーバ、エアスプリング、ショクアブソーバの減衰力を制御するアクチュエータ、エアスプリングのばね定数や減衰力を制御するアクチュエータが含まれる。この懸架装置21は、車両の走行条件に応じてショックアブソーバの減衰力、エアスプリングの減衰力やばね定数がコンピュータで制御され、操縦安定性、乗り心地の向上が図られる。
【0026】
さらにまた、補機装置22には、エアーコンディショナー、フォグランプ、ワイパー、ホーンなどが含まれる。また、車両の走行方向を制御する操舵装置23には、運転者により操作されるステアリングホイール、ステアリングホイールの回転をステアリングリンク機構に伝達するギヤボックス、ギヤボックスに油圧を供給するベーンポンプ、この油圧を電気的に制御するソレノイドバルブなどが含まれる。そして、車速に応じて操舵力が制御され、操作性が向上される。
【0027】
一方、自動変速機用電子制御装置18、ブレーキ装置19、クルーズコントロール装置20、懸架装置21、補機装置22、操舵装置23には、ナビゲーションシステム24がデータ通信可能に接続されており、ナビゲーションシステム24により検出されたデータに基づく信号が、エンジン用電子制御装置4、自動変速機用電子制御装置18、ブレーキ装置19、クルーズコントロール装置20、懸架装置21、補機装置22、操舵装置23に入力され、各装置の制御内容が、ナビゲーションシステム24により検出された情報に基づいて補正・変更可能とされる構成になっている。
【0028】
ナビゲーションシステム24は、電子制御装置25とプレーヤ26と出力装置27と第1情報検出装置28と第2情報検出装置29とを備えている。プレーヤ26と出力装置27と第1情報検出装置28と第2情報検出装置29とが電子制御装置25により制御される。
【0029】
この電子制御装置25は、中央演算処理装置(CPU)および記憶装置(RAM、ROM)並びに入出力インターフェースを主体とするマイクロコンピュータにより構成されている。プレーヤ26は、光ディスクや磁気ディスクなどの情報記録媒体に記憶されている情報を読み取り、かつ、車両の走行予定道路や目的地の入力操作を行うためのものである。
【0030】
前記情報記録媒体には車両の走行に必要な情報、例えば地図、地名、道路、道路周辺の主要建築物などが記憶されているとともに、具体的な道路状況、例えば、直線路、カーブ、登坂、降坂、市街地、山間地、普通道路、高速道路、各道路における道路標識、交通法規などが記憶されている。
【0031】
また、出力装置27はプレーヤ26により読み取られた情報や、目的地までの走行予定道路、走行予定道路の道路状況、自車両の現在位置、他車両の存在およびその位置、障害物の有無やその位置などを画像や音声により出力するためもので、出力装置27にはマルチディスプレイ、スピーカ、ブザー、チャイムなどが含まれる。
【0032】
さらに、第1情報検出装置28は自立航法により自車両の現在位置や道路状況あるいは他車両との車間距離などを検出するためのもので、第1情報検出装置28には、車両の走行する方位を検出する地磁気センサ、ステアリングホイール舵角を検出するステアリングセンサ、道路の勾配を検出する勾配センサ、先行車両の認識や車間距離を検出するビデオカメラ,レーザークルーズ装置,距離センサなどが含まれる。
【0033】
さらにまた、第2情報検出装置29は電波航法により自車両の現在位置、道路状況、他車両、障害物、天候などを検出するためのもので、第2情報検出装置29には、人工衛星からの電波を受信するGPSアンテナ、他車両に搭載されている検出装置としてのナビゲーションシステムの発信機から送信される電波や、路側に設置されているビーコンやサインポストから発信される電波や、VICS(ビークル・インフォメーション&コミュニケーション・システム)、SSVS(スーパー・スマート・ビークル・システム)からの電波を受信するアンテナなどが含まれる。
【0034】
なお、他車両に搭載されているナビゲーションシステムの発信機から送信された電波を、自車両のナビゲーションシステム24により受信する方法としては、他車両から直接受信する方法と、VICSやSSVSを介して間接的に受信する方法とがある。
【0035】
上記エンジン1、自動変速機2、エンジン用電子制御装置4、自動変速機用電子制御装置18、油圧制御回路17、ブレーキ装置19、クルーズコントロール装置20、懸架装置21、操舵装置23などが請求項1および請求項2の挙動制御装置に相当し、ナビゲーションシステム24が請求項1および請求項2の外部情報検出装置に相当する。
【0036】
つぎに、この発明の具体的な制御例を説明する。各制御例において、他車両には、他車両の走行状態、周囲の道路状況、周囲の天候、周囲の障害物などを検出するため、各種のセンサと、上記ナビゲーションシステム24とほぼ同様な検出装置と、各種のセンサおよび検出装置により検出された情報を外部に発信する発信装置とが搭載されていることが前提になる。
【0037】
(第1制御例)
他車両の後方を自車両が追従走行している場合、他車両が急激に減速した場合に備えて車間距離を充分に確保する必要がある。ここで、他車両がブレーキペダルの踏み込みにより減速する場合には、他車両のブレーキランプが点灯するため自車両の運転者は他車両の減速を容易に認識することが可能である。
【0038】
しかしながら、他車両がブレーキペダルの操作以外の操作により減速された場合、例えば他車両に搭載されている自動変速機がマニュアルダウンシフトされ、エンジンブレーキ力が強められて他車両が減速された場合には、自車両の運転者は他車両の減速を迅速に認識することが困難である。その結果、自車両と他車両との車間距離が所期の状態よりも狭められ、ドライバビリティが低下する可能性がある。この第1制御例は上記問題を解決するためのものである。
【0039】
第1制御例を図1のフローチャートに基づいて説明する。まず、運転者により入力された目的地までの走行予定道路がナビゲーションシステム24の出力装置27に出力される。また、第1情報検出装置28または第2情報検出装置29の少なくとも一方により得られる情報に基づいて車両の現在位置が検出され、現在位置が出力装置27に出力される。
【0040】
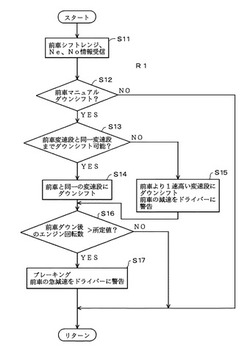
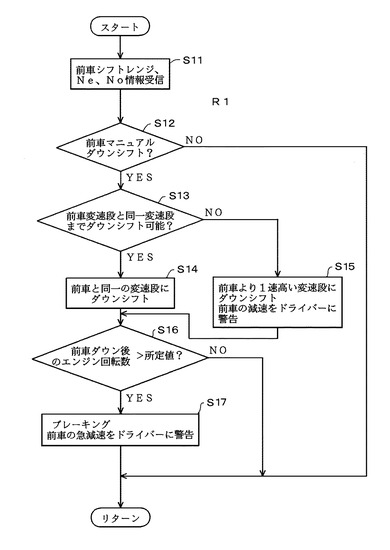
そして、ナビゲーションシステム24により、車両の走行予定道路の前方の所定距離内に他車両の存在が検出された場合には、他車両の検出装置を介して他車両の走行状態、具体的には自動変速機のシフトレンジ、エンジン回転数、自動変速機の出力軸回転数などの情報が検出される(ステップS11)。
【0041】
そして、ナビゲーションシステム24により、他車両の自動変速機がマニュアルダウンシフトされたか否かが判断される(ステップS12)。ステップS12で肯定判断された場合は、他車両のエンジンブレーキ力が強められて減速する可能性がある。そこで、まず、自車両の自動変速機2の変速段を他車両の変速段と同一の変速段までダウンシフトすれば所定の車間距離を維持できるか否かが判断される(ステップS13)。つまり、自車両の自動変速機2の減速度と、他車両の自動変速機の減速度とが同一であるとは限らないため、両者の減速度に基づいて所定の車間距離を維持できるように自車両の減速度を制御するためである。
【0042】
ステップS13で肯定判断された場合は、自車両の自動変速機2が他車両の自動変速機と同一の変速段にダウンシフトされ、自車両のエンジンブレーキ力が強められて減速される(ステップS14)。一方、ステップS13で否定判断された場合は、他車両と同一の変速段まで自車両の自動変速機2をダウンシフトさせなくても車間距離を維持可能であるため、自車両の自動変速機2が他車両よりも1段高い変速段にダウンシフトされて自車両が減速され、他車両の減速を自車両の運転者に警告する(ステップS15)。
【0043】
ステップS14またはステップS15の制御についで、他車両のダウンシフト後におけるエンジン回転数が所定値を超えているか否かが判断される(ステップS16)。ステップS16で肯定判断された場合は、他車両に所定値以上の強いエンジンブレーキ力が生じて急激な減速が予想されるため、ブレーキ装置19に信号が入力されて自車両をブレーキ装置19の制動力により減速させる制御が行われ、他車両の急減速が自車両の運転者に警告される(ステップS17)。なお、運転者によりブレーキペダルが既に踏み込まれていた場合は、ブレーキ装置19のホイールシリンダに作用する油圧を一層高める制御が行われる。
【0044】
また、ステップS16で否定判断された場合は他車両がエンジンブレーキ力により急減速する可能性がないためリターンされる。なお、ステップS12で否定判断された場合は、ステップS13ないしステップS17の制御が行われることなくリターンされる。上記ステップS11,S12が請求項1および2のシフト情報検出手段に相当し、ステップS13ないしS17が請求項1の挙動制御手段に相当する。そのうちステップS16およびS17が請求項2の挙動制御手段に相当する。
【0045】
このように、他車両に搭載されている自動変速機がマニュアルシフト操作された場合には、他車両のブレーキランプが点灯することなくエンジンブレーキ力により他車両が減速されるため、自車両の運転者は他車両の減速を迅速に認識することが困難であるが、この第1制御例によれば他車両のマニュアルダウンシフトに対応して自車両の自動変速機2が自動的にダウンシフトされる。
【0046】
したがって、他車両がエンジンブレーキ力により減速されるのとほぼ同時に自車両のエンジンブレーキ力を強めて減速させる制御を行うことが可能になり、他車両と自車両との車間距離が所期の状態に維持されてドライバビリティが向上する。
【0047】
(第2制御例)
自車両が他車両の後方を追従して走行中に、他車両のブレーキ装置が動作されて減速したり、アクセルペダルの踏み込みにより加速したりした場合、自車両と他車両との車間距離を所期の状態に維持できなくなる場合がある。第2制御例は上記問題を解決するためのものである。
【0048】
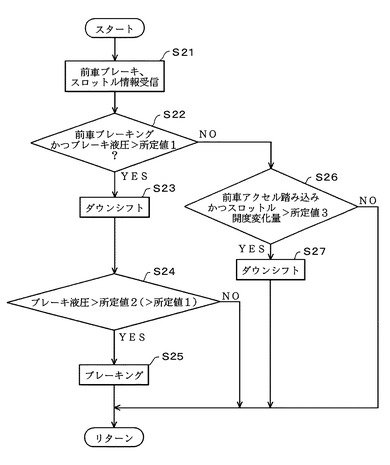
図2は第2制御例を示すフローチャートであり、ナビゲーションシステム24により、自車両の前方を走行している他車両の走行状態、具体的にはブレーキ装置の動作およびアクセルペダルの操作情報が検出される(ステップS21)。そして、他車両でブレーキ装置の動作の有無が判断され、ブレーキ装置が動作された場合は他車両のホイールシリンダに作用するブレーキ油圧が所定値1を超えているか否かが判断される(ステップS22)。なお、ブレーキ油圧のほか、ブレーキペダルスイッチやストップランプスイッチのオン・オフを判断基準にすることも可能である。
【0049】
ステップS22で肯定判断された場合は、他車両が所定の減速度に到達して他車両と自車両との車間距離が狭められる可能性があるため、自動変速機2をダウンシフトさせる制御が行われ、エンジンブレーキ力が強められて車両が減速され、他車両の減速が自車両の運転者に警告される(ステップS23)。
【0050】
ついで、他車両のブレーキ油圧が所定値2を超えているか否かが判断される(ステップS24)。この所定値2は所定値1よりも大きい値に設定されている。つまり、ステップS24は、ステップS23で行われたダウンシフト制御によるエンジンブレーキ力だけで自車両と他車両との車間距離を所期の状態に維持できるかどうかを確実に判定するために行われる。
【0051】
ステップS24で肯定判断された場合は、自車両のエンジンブレーキ力による減速度では不十分であり、他車両との車間距離が狭められる可能性があるため、ブレーキ装置19が制御されて自車両の減速度が増大され(ステップS25)、リターンされる。なお、運転者によりブレーキ装置19が既に操作されていた場合は、ホイールシリンダに作用するブレーキ油圧を高める制御が行われる。なお、ステップS25において、ブレーキ装置19のホイールシリンダに作用する油圧は、他車両のブレーキ油圧、他車両の減速度、自車両の減速度、自車両と他車両との車間距離などの条件に基づいて制御される。
【0052】
また、ステップS24で否定判断された場合は、自動変速機2のダウンシフトにより生じるエンジンブレーキ力で、車間距離を所期の状態に維持することが可能であるためリターンされる。
【0053】
さらに、ステップS22で否定判断された場合は、ナビゲーションシステム24により、他車両のアクセルペダルの踏み込み量およびスロットルバルブの開度が、所定値3を超えているか否かが判断される(ステップS26)。ステップS26で肯定判断された場合は、他車両が急加速される可能性があるため、自車両の自動変速機2をダウンシフトさせる制御が行われ(ステップS27)、アクセルペダル3の踏み込みにより自車両の加速性能を高めることが可能な状態になる。したがって、他車両と自車両との車間距離を所期の状態に維持したまま、追従走行を継続させることができる。
【0054】
なお、ステップS26で否定判断された場合は、他車両が急加速される可能性がなく、自車両の挙動制御装置の制御状態をそのまま維持すれば、他車両と自車両との車間距離を所期の状態に保つことが可能であるためリターンされる。
【0055】
このように、第2制御例によれば、自車両が他車両の後方を追従走行中に、他車両のブレーキ装置の動作が検出された場合には、自動的に自車両の自動変速機2のダウンシフト制御またはブレーキ装置19のブレーキ油圧制御が実行されて自車両の減速性能が高められる。
【0056】
一方、他車両のアクセルペダルが踏み込まれた場合には、自動的に自動変速機2がダウンシフト制御され、アクセルペダル3の踏み込みにより加速性能が高められる。したがって、自車両の前方の他車両が減速する場合または加速する場合のいずれにおいても、自動的に自車両と他車両との車間距離を所期の状態に維持したまま追従走行を継続することができ、ドライバビリティが向上する。
【0057】
(第3制御例)
自車両が他車両の後方を追従走行中に、他車両のブレーキ装置が動作して減速されたり、アクセルペダルの踏み込みにより加速されたりすると、自車両と他車両との車間距離を所期の状態に維持できなくなる。第3制御例は上記問題を解決するためのものである。なお、第2制御例では、他車両のブレーキ装置の動作またはアクセルペダルの操作状態を基準にして自車両の挙動を制御しているのに対し、第3制御例では他車両の加速度および減速度を基準にして自車両の挙動を制御している点が相違する。
【0058】
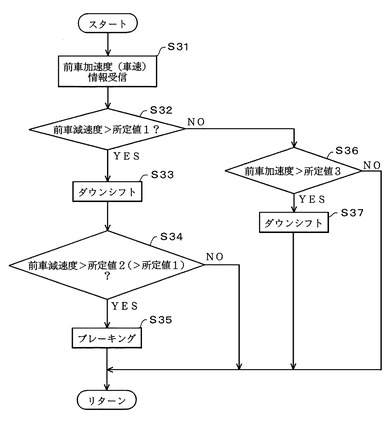
図3は第3制御例を示すフローチャートであり、ナビゲーションシステム24により、他車両の加速度および減速度、言い換えれば車速が検出され(ステップS31)、他車両の減速度が所定値1を超えているか否かが判断される(ステップS32)。ステップS32で肯定判断された場合は、他車両と自車両との車間距離が狭められる可能性があるため、自動変速機2を自動的にダウンシフトさせる制御が行われ、エンジンブレーキ力により自車両が減速して他車両の減速が自車両の運転者に警告される。(ステップS33)。
【0059】
ついで、他車両の減速度が所定値2を超えているか否かが判断される(ステップS34)。この所定値2は所定値1よりも大きい値に設定されている。つまり、ステップS34は、ステップS33で行われたダウンシフト制御によるエンジンブレーキ力だけで自車両と他車両との車間距離を所期の状態に維持できるかどうかを確実に判定するために行われる。
【0060】
ステップS34で肯定判断された場合は、自車両のエンジンブレーキ力による減速度では不十分であり、他車両との車間距離がさらに狭められる可能性があるため、ブレーキ装置19が制御されることで自車両の減速度が増大され(ステップS35)、リターンされる。なお、運転者によりブレーキ装置19が既に操作されていた場合は、ホイールシリンダに作用するブレーキ油圧を高める制御が行われる。
【0061】
また、ステップS34で否定判断された場合は、自動変速機2のダウンシフトにより生じるエンジンブレーキ力で所期の車間距離を維持することが可能であるため、リターンされる。
【0062】
さらに、ステップS32で否定判断された場合は、ナビゲーションシステム24により、他車両の加速度が所定値3を超えているか否かが判断される(ステップS36)。ステップS36で肯定判断された場合は、他車両と自車両との車間距離が所定以上に広がる可能性があるため、自車両の自動変速機2を自動的にダウンシフトさせる制御が行われ(ステップS37)、自車両のアクセルペダル3を踏み込めば自車両の加速性能が高められる。このため、他車両と自車両との車間距離を所期の状態に維持したまま、追従走行を継続させることが可能になる。
【0063】
なお、ステップS36で否定判断された場合は、他車両が急加速される可能性がなく、自車両の挙動制御装置の制御状態を維持することで他車両と自車両との車間距離を所期の状態に保つことが可能であるため、そのままリターンされる。
【0064】
このように、第3制御例によれば、自車両が他車両の後方を追従走行中に、他車両に所定の減速度が検出された場合には、自動的に自車両の自動変速機2のダウンシフト制御またはブレーキ装置19のブレーキ油圧制御が実行されて自車両の減速性能が高められる。
【0065】
一方、他車両に所定値を超える加速度が検出された場合は、自動的に自動変速機2がダウンシフト制御されて加速性能が高められる。したがって、自車両の前方の他車両が減速する場合または加速する場合のいずれにおいても、自動的に自車両と他車両との車間距離を所期の状態に維持したまま追従走行を継続することが可能になり、ドライバビリティが向上する。
【0066】
(第4制御例)
自車両が道路を走行中に、路面の凍結や積雪などにより摩擦係数の低い場所があると、車輪がスリップして操縦安定性が低下する可能性がある。一方、ABS(アンチロクブレーキシステム)機能を備えた車両であれば、低摩擦係数路を走行する場合には、各車輪の回転速度差に基づいた制動力が各車輪に与えられ、車輪のスリップを抑制できるため、操縦安定性を維持することが比較的容易である。
【0067】
しかしながら、上記ABS機能は車両が実際に低摩擦係数路にさしかかってある程度車輪のスリップが生じてからでなければ機能しないため、スリップそのものを未然に防止するような制御を行い得なかった。第4制御例は上記問題を解決するためのものである。
【0068】
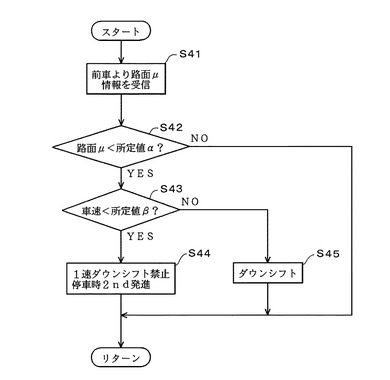
図4は第4制御例を示すフローチャートであり、他車両で検出された路面の摩擦係数μの情報がナビゲーションシステム24により検出され(ステップS41)、検出された摩擦係数μが所定値α未満であるか否かが判断される(ステップS42)。ステップS42で否定判断された場合は、自車両の駆動力のままで車輪のスリップが生じる可能性が少ないため、リターンされる。
【0069】
ステップS42で肯定判断された場合は、自車両の駆動力を維持した状態で走行すれば、前方の低摩擦係数路で車輪のスリップが生じる可能性があるため、自車両の車速が所定値β未満であるか否かが判断される(ステップS43)。
【0070】
ステップS43で肯定判断された場合は、自車両が低摩擦係数路を走行する際に自動変速機2の変速段を第1速にダウンシフトすることが禁止されるとともに、自車両が低摩擦係数路で停車した場合には、次回の発進時に自動変速機2の変速段を第2速に設定する制御が行われ(ステップS44)、リターンされる。
【0071】
また、ステップS43で否定判断された場合は、自車両が低摩擦係数路に到達する前に自動変速機2をダウンシフトして減速を促す制御が行われ(ステップS45)、リターンされる。
【0072】
このように、第4制御例によれば、他車両により検出される低摩擦係数路の情報に基づいて、自車両の自動変速機2が自動的に制御されて自車両の車輪の駆動力や車速が可及的に抑制される。したがって、自車両が低摩擦係数路に到達する前に、自車両の駆動力を可及的に抑制することで車輪のスリップを未然に防止することができ、操縦安定性が向上する。また、自車両が低摩擦係数路で停車した状態から発進する場合、駆動力が可及的に抑制されて車輪のスリップを未然に防止することができ、操縦安定性が向上する。
【0073】
(第5制御例)
車両の走行中は天候により操縦安定性や前方の視認性が大きく左右される。つまり、雨天時には路面が濡れて車輪がスリップしやすくなるうえ、フロントウィンドガラスが濡れて前方の視認性が低下する。また、霧が発生した場合には、自車両の周囲の視認性が低下するばかりでなく、自車両の周囲に存在する他車両や歩行者から自車両が認識されにくくなり、自車両と他車両、歩行者、障害物とが接近しすぎる可能性がある。
【0074】
さらに、車両が走行中に突風が生じ、この突風が車両の側面に吹き付けられた場合には、風圧によって車両に回頭モーメントが生じる。このように、いずれの場合にも操縦安定性や視認性あるいはドライバビリティが低下する可能性がある。特に、自車両がトンネル内を走行している場合は、トンネルの出口側の天候を予測できないため、上記問題が一層顕著なものになる。第5制御例は上記問題を解決するためのものである。
【0075】
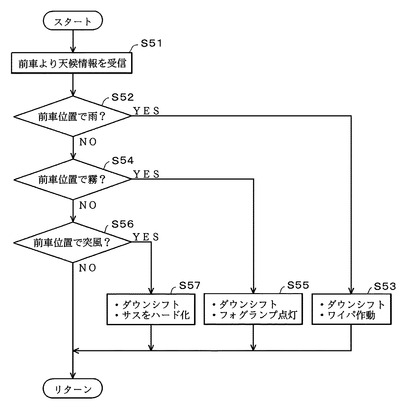
図5は第5制御例を示すフローチャートである。この制御例では他車両が雨滴を感知するセンサや、横風による車両挙動を検出するヨーレイトセンサを備えていることが前提になる。まず、自車両の前方を走行している他車両で検出された天候情報がナビゲーションシステム24により検出される(ステップS51)。
【0076】
ここで対象となる他車両は、他車両の直近に位置している車両よりも所定距離を隔てた位置を走行している車両や、自車両が到達するまでに所定時間を要する箇所に位置している車両を対象にすることが望ましい。その理由は、自車両の走行位置からでは確認できない走行予定経路の前方の天候情報が得られるからである。
【0077】
ステップS52で肯定判断された場合は、路面が濡れて摩擦係数が低くなり、かつ、フロントウィンドガラスが濡れる可能性があるため、事前に自動変速機2が自動的にダウンシフト制御されて減速を促し、かつ、補機装置22のワイパーが動作され(ステップS53)、リターンされる。したがって、車輪のスリップが未然に防止されて操縦安定性が維持されるとともに、フロントウィンドガラスの水が除去されて視認性が維持されて、周囲の他車両、歩行者、障害物を認識しやすくなる。
【0078】
また、ステップS52で否定判断された場合は、他車両の周囲で霧が発生しているが否かが判断され(ステップS54)、ステップS54で肯定判断された場合は、事前に自動変速機2が自動的にダウンシフト制御されて減速を促し、かつ、補機装置22のフォグランプが点灯され(ステップS55)、リターンされる。したがって、自車両の周囲の他車両、歩行者、障害物を認識しやすくなり、これらの物体との距離や相対位置を所期の状態に維持できる。
【0079】
さらに、ステップS54で否定判断された場合は、他車両が突風を受けているか否かが判断され(ステップS56)、ステップS56で肯定判断された場合は、事前に自動変速機2が自動的にダウンシフト制御されて減速を促し、かつ、懸架装置21のショックアブソーバの減衰力、またはエアスプリングの減衰力やばね定数を高める、言い換えればハード化する制御が行われ(ステップS57)、リターンされる。したがって、自車両が横風を受けた場合において、その風圧により車両に回頭モーメントが生じることを抑制でき、操縦安定性およびドライバビリティが向上する。
【0080】
なお、ステップS53,S55,S57の制御内容は、天候が検出された時点で即座に実行する必要性はなく、検出された天候に対して自車両が所定位置に到達してから各制御を実行すれば効果的である。なお、この制御例では、操舵装置23のステアリングハンドルの操舵力を制御することも可能である。
【0081】
このように、第5制御例によれば、自車両の前方を走行している他車両により検出された天候情報をナビゲーションシステム24により検出しているため、自車両の走行位置では認識できない天候を事前に検出でき、その天候情報に基づいて自車両の挙動制御装置を制御することが可能になる。したがって、自車両が現地の天候に遭遇する前に自車両の挙動を天候に合致したものに設定することができ、自車両の操縦安定性や視認性、ならびにドライバビリティを向上させることができる。特に、トンネルの出口や山間部の天候急変箇所などでの操縦安定性やドライバビリティの向上に一層有効である。
【0082】
(第6制御例)
自車両が他車両の後方を追従して走行中に、他車両がワインディング路や低摩擦係数路に到達した場合に、自車両が各道路状況に到達してから挙動の制御が行われたのでは、他車両と自車両との挙動に差異が生じてしまい、自車両と他車両との車間距離が所期の状態に維持できなくなる可能性がある。第6制御例はこの問題を解決するためになされたものである。
【0083】
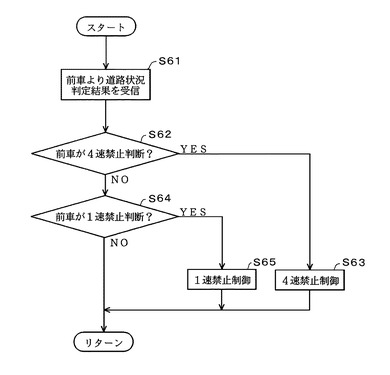
図6は第6制御例を示すフローチャートである。まず、他車両で検出された道路情報がナビゲーションシステム24により検出される(ステップS61)。そして、他車両で自動変速機の第4速を禁止する制御が行われているか否かが判断され(ステップS62)、ステップS62で肯定判断された場合は他車両がワインディング路にさしかかった可能性があるため、自動的に自動変速機2の第4速を禁止して減速を促す制御が行われ(ステップS63)、リターンされる。
【0084】
また、ステップS62で否定判断された場合は、他車両で自動変速機の第1速を禁止する制御が行われているか否かが判断される(ステップS64)。ステップS64で肯定判断された場合は、前方に低摩擦係数路が存在している可能性があるため、自動的に自動変速機2の第1速を禁止して車両の駆動力を抑制する制御が行われ(ステップS65)、リターンされる。なお、ステップS64で否定判断された場合はそのままリターンされる。
【0085】
このように、第6制御例によれば、自車両の前方を走行している他車両により検出されている道路情報と、他車両の挙動制御内容とをナビゲーションシステム24により事前に検出することが可能である。したがって、他車両がニューラルネットワーク制御やファジー制御により行っている挙動制御を、自車両が道路状況の変化する場所に到達する前に受信して、自車両の挙動を他車両の制御内容とほぼ同様に制御することが可能であり、ドライバビリティが向上する。
【0086】
なお、上記第1制御例ないし第6制御例は、複数の制御例を組み合わせて行うことも可能である。また、第1制御例,第4制御例,第5制御例,第6制御例は、自車両の走行予定経路の前方に位置する車両であれば、直近の他車両以外の車両を対象にすることができる。そして、検出された情報の発生時刻に基づいて、自車両がその道路状況に到達した際に自車両の挙動制御装置を制御すればほぼ同様の作用効果を得られる。
【0087】
さらに、上記各制御例においては、他車両によって検出された情報を自車両で受信する構成を採用しているため、自車両に装備されたシステムでは検出することが不可能な情報、例えば摩擦係数などを得ることが可能であり、自車両の挙動制御装置を制御するための条件が拡大され、一層適切な挙動制御が可能になる。さらにまた、第3制御例は他車両の加減速度を検出し、その検出結果に基づいて自車両の挙動制御装置を制御するものであるため、最低限、他車両の加減速度を検出できるレーザークルーズを装備していれば実施可能である。
【0088】
また、この発明は公知の無段変速機構を備えた自動変速機を搭載した車両にも適用可能である。また、この発明は、エンジンに代えて電動モータが搭載された電気自動車、または電動モータおよびエンジンが搭載されたハイブリッド車にも適用可能である。電動モータが用いられた場合は、電動モータの回生制動力により駆動力が低減される。また、電動モータが用いられた場合は、電動モータに供給する電流を制御することにより出力トルクの増減を行うことが可能である。
【図面の簡単な説明】
【0089】
【図1】この発明の第1制御例を示すフローチャートである。
【図2】この発明の第2制御例を示すフローチャートである。
【図3】この発明の第3制御例を示すフローチャートである。
【図4】この発明の第4制御例を示すフローチャートである。
【図5】この発明の第5制御例を示すフローチャートである。
【図6】この発明の第6制御例を示すフローチャートである。
【図7】この発明が適用された車両のシステムを示すブロック図である。
【符号の説明】
【0090】
1…エンジン、 2…自動変速機、 3…アクセルペダル、 4…エンジン用電子制御装置、 17…油圧制御回路、 18…自動変速機用電子制御装置、 19…ブレーキ装置、 20…クルーズコントロール装置、 21…懸架装置、 23…操舵装置、 24…ナビゲーションシステム。
【技術分野】
【0001】
この発明は、自車両の周囲に位置する他車両の情報を、他車両に搭載されている検出装置を介して自車両で検出し、検出された情報に基づいて自車両の挙動を制御することの可能な車両の制御装置に関するものである。
【背景技術】
【0002】
一般に、車両には原動機や変速機などの挙動制御装置が搭載されており、これらの挙動制御装置は、運転者の操作により制御される場合と、各種のセンサにより検出される走行状態に基づいて自動的に制御される場合とがある。
【0003】
しかしながら、上記制御はいずれも具体的な道路状況に遭遇してから実行されるため、道路状況に対する挙動制御装置の制御が後手に回りやすく、ドライバビリティが低下する場合が生じる。
【0004】
一方、近年はナビゲーションシステムの発達により、自車両の周囲の状況を事前に検出し、検出結果に基づいて原動機や自動変速機を制御することで、車両の挙動を所期の状態に制御する発明がなされている。
【0005】
このような車両の制御装置の一例が特許文献1に記載されている。この特許文献1に記載された車両の制御装置は、前方に存在する他車両からの情報を受信する手段と、自車両内に存在する各種コントローラと接続された走行情報処理手段とを備えている。
【0006】
上記車両の制御装置によれば、自車両と他車両との間で前方車の位置情報、急ブレーキの情報、スリップ路面の存在情報などが交信され、各種の情報に基づいて自車両のコントローラが制御され、道路状況など周囲の状況に即した走行が可能になる。
【0007】
【特許文献1】特開平5−266399号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上記公報に記載された車両の制御装置においては、他車両の具体的な状態、例えば他車両に搭載された自動変速機のマニュアルシフト操作の有無が考慮されていないため、他車両の自動変速機がマニュアルシフト操作された状態における自車両と他車両との相対関係が不適切になり、ドライバビリティが低下する可能性があった。
【0009】
この発明は、上記事情を背景としてなされたもので、他車両に搭載された自動変速機のマニュアルシフト操作の有無に基づいて、自車両の挙動を制御することの可能な車両の制御装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
上記目的を達成するため請求項1の発明は、自車両の挙動を制御する挙動制御装置と、他車両の情報を当該他車両に搭載されている検出装置を介して検出する外部情報検出装置とを備え、この外部情報検出装置により検出された情報に基づいて前記挙動制御装置の制御が行われる車両の制御装置において、前記外部情報検出装置により前記他車両の自動変速機のシフト情報を検出するシフト情報検出手段と、このシフト情報検出手段により前記他車両の自動変速機のマニュアルダウンシフトが検出された場合に、前記自車両の自動変速機の変速段を前記他車両の自動変速機の変速段と同一の変速段までダウンシフトすれば所定の車間距離を維持できるか否かを判断し、肯定された場合には、前記自車両の自動変速機の変速段を前記他車両の自動変速機の変速段と同一の変速段にダウンシフトし、否定判断された場合には、前記自車両の自動変速機の変速段を前記他車両の自動変速機の変速段よりも1段高い変速段にダウンシフトするとともに前記他車両の減速を前記自車両の運転者に警告する挙動制御手段とを備えていることを特徴とする。
【0011】
また、請求項2の発明は、請求項1の発明において、前記外部情報検出装置により前記他車両のエンジン回転数を検出するエンジン回転数検出手段を更に備え、前記挙動制御手段は、前記シフト情報検出手段により前記他車両の自動変速機のマニュアルダウンシフトが検出され、かつ前記エンジン回転数検出手段により検出された前記他車両のエンジン回転数が所定値よりも大きい場合に、前記自車両をブレーキ装置の制動力により減速制御する手段を含むことを特徴とする。
【発明の効果】
【0012】
したがって、請求項1の発明によれば、他車両の自動変速機がマニュアルダウンシフト操作されたことが自車両の外部情報検出装置により検出されると、他車両の自動変速機の変速段と同一の変速段まで自車両の自動変速機をダウンシフトすれば所定の車間距離を維持できるか否かが判断される。これは、自車両の自動変速機の減速度と、他車両の自動変速機の減速度とが同一であるとは限らないため、両者の減速度に基づいて所定の車間距離を維持できるように自車両の減速度を制御するためである。そして、肯定判断された場合、すなわち他車両の自動変速機の変速段と同一の変速段まで自車両の自動変速機をダウンシフトすれば所定の車間距離を維持できると判断された場合は、自車両の自動変速機が他車両の自動変速機と同一の変速段にダウンシフトされ、自車両のエンジンブレーキが強められて減速される。一方、否定判断された場合、すなわち他車両の自動変速機の変速段と同一の変速段まで自車両の自動変速機をダウンシフトさせなくとも所定の車間距離を維持可能と判断された場合には、自車両の自動変速機が他車両よりも1段高い変速段にダウンシフトされて自車両が減速され、他車両の減速が自車両の運転者に警告される。したがって、自車両の駆動力を他車両の駆動力に対応させて変化させ、自車両と他車両との車間距離を所期の状態に維持することができ、ドライバビリティが向上する。
【0013】
また、請求項2の発明によれば、他車両のダウンシフト後におけるエンジン回転数が所定値を超えていると判断された場合は、他車両に強いエンジンブレーキ力が生じて急激な減速が予想されるため、自車両をブレーキ装置の制動力により減速させる制御が行われる。したがって、自車両の駆動力を他車両の駆動力に対応させて変化させ、自車両と他車両との車間距離を所期の状態に維持することができ、ドライバビリティが向上する。
【発明を実施するための最良の形態】
【0014】
つぎにこの発明を図を参照してより具体的に説明する。図7は、この発明を適用した車両のシステムを示すブロック図であり、車両には駆動力源としてのエンジン1が搭載され、エンジン1の出力側には自動変速機2が接続されている。そして、運転者により操作されるアクセルペダル3の操作信号がエンジン用電子制御装置4に入力されている。
【0015】
また、エンジン1の吸気配管5には、スロットルアクチュエータ6によって駆動される電子スロットルバルブ7が設けられている。そして、アクセルペダル3の踏み込み量に応じてエンジン用電子制御装置4からスロットルアクチュエータ6に制御信号が出力され、その制御量に応じて電子スロットルバルブ7の開度が制御されるようになっている。
【0016】
エンジン1を制御するためのエンジン用電子制御装置4は、中央演算処理装置(CPU)および記憶装置(RAM,ROM)ならびに入出力インターフェースを主体とするマイクロコンピュータにより構成されている。
【0017】
このエンジン用電子制御装置4には、上記のアクセルペダル3の踏み込み量に応じた信号に加えて、エンジン回転速度センサ8の出力信号、吸入空気量センサ(エアーフローメータ)9の出力信号、吸入空気温度センサ10の出力信号、電子スロットルバルブ7の開度を検出するスロットル開度センサ11の出力信号、自動変速機2の出力軸回転数、言い換えれば車速を検出する車速センサ12の出力信号、冷却水温度センサ13の出力信号、ブレーキペダルのオン・オフを検出するブレーキスイッチ14の出力信号などが制御データとして入力される。
【0018】
また、エンジン用電子制御装置4は、上記のスロットルアクチュエータ6の制御に加えて、自動変速機2の変速時に、燃料噴射装置15や点火時期を変更するイグナイタ16などに信号を出力するように構成されている。さらに、エンジン用電子制御装置4には、後述するナビゲーションシステムやクルーズコントロール装置からも信号が入力され、これらの入力信号に基づいてスロットルアクチュエータ6、燃料噴射装置15、イグナイタ16などに制御信号を出力するように構成されている。
【0019】
一方、有段変速式の自動変速機2は、トルクコンバータ、ロックアップクラッチ、歯車変速機構、摩擦係合装置などの公知の構造を備えている。自動変速機2の各摩擦係合装置およびロックアップクラッチに作用する油圧は油圧制御回路17により電気的に制御される。油圧制御回路17は、シフトソレノイドバルブやリニアソレノイドバルブを備えている。
【0020】
そして、油圧制御回路17の各ソレノイドバルブに制御信号を出力する自動変速機用電子制御装置18が設けられている。この自動変速機用電子制御装置18は、エンジン用電子制御装置4と同様に、中央演算処理装置(CPU)および記憶装置(RAM,ROM)ならびに入出力インターフェースを主体とするものである。したがって、必要に応じてエンジン用電子制御装置4と自動変速機用電子制御装置18とを統合・一体化することができる。
【0021】
この自動変速機用電子制御装置18は、予め記憶している変速マップや演算式に従って入力データに基づく演算を行い、演算結果に基づいた制御信号を前記各ソレノイドバルブに出力し、変速段の設定、変速時における摩擦係合装置の係合・解放の制御、あるいはロックアップクラッチの係合・解放の制御ならびに変速時の過渡油圧の制御などを実行するように構成されている。さらに自動変速機用電子制御装置18は、後述するナビゲーションシステムにより検出されるデータに基づいて自動変速機2を制御する信号を出力するように構成されている。
【0022】
上記エンジン用電子制御装置4と自動変速機用電子制御装置18とは、相互にデータ通信可能に接続されており、自動変速機用電子制御装置18には、制御データとして、上記のアクセルペダル3の操作信号、スロットル開度センサ11の出力信号、車速センサ12の出力信号、冷却水温度センサ13の出力信号、ブレーキスイッチ14の出力信号などが入力されている。また、自動変速機用電子制御装置18からは、各変速段を設定する信号がエンジン用電子制御装置4に送信されている。
【0023】
一方、ブレーキ装置19には、運転者により操作されるブレーキペダル、ブレーキペダルの踏み込み力を油圧に変換するマスターシリンダ、マスターシリンダの油圧が作用するホイールシリンダ、ホイールシリンダに作用する油圧を電気的に制御するソレノイドバルブ、各車輪の回転速度を検出する回転速度センサなどが含まれる。このブレーキ装置19は、ブレーキペダルの操作によりホイールシリンダに油圧が供給されて制動力を生じる機能と、回転速度センサや自動変速機用電子制御装置18またはエンジン用電子制御装置4から転送される信号に基づいてホイールシリンダに油圧を供給する機能とを備えている。
【0024】
また、クルーズコントロール装置20は、エンジン1および自動変速機2を制御して車両を定速走行させるためのもので、車速の設定、解除、復帰などの制御が行われる。クルーズコントロール装置20の信号はエンジン用電子制御装置4および自動変速機用電子制御装置18に入力され、アクセルペダル3を踏み込まなくても電子スロットルバルブ7の開度が制御され、車速を自動的に一定に維持することが可能である。なお、定速走行制御の実行中にアクセルペダル3、ブレーキペダル、自動変速機2のシフトレバー、パーキングレバーが操作された場合にも、定速走行制御が解除されるように構成されている。
【0025】
懸架装置21は車体を支持し、かつ、車体の振動や操縦安定性などの挙動を制御するためのもので、懸架装置21はショックアブソーバ、エアスプリング、ショクアブソーバの減衰力を制御するアクチュエータ、エアスプリングのばね定数や減衰力を制御するアクチュエータが含まれる。この懸架装置21は、車両の走行条件に応じてショックアブソーバの減衰力、エアスプリングの減衰力やばね定数がコンピュータで制御され、操縦安定性、乗り心地の向上が図られる。
【0026】
さらにまた、補機装置22には、エアーコンディショナー、フォグランプ、ワイパー、ホーンなどが含まれる。また、車両の走行方向を制御する操舵装置23には、運転者により操作されるステアリングホイール、ステアリングホイールの回転をステアリングリンク機構に伝達するギヤボックス、ギヤボックスに油圧を供給するベーンポンプ、この油圧を電気的に制御するソレノイドバルブなどが含まれる。そして、車速に応じて操舵力が制御され、操作性が向上される。
【0027】
一方、自動変速機用電子制御装置18、ブレーキ装置19、クルーズコントロール装置20、懸架装置21、補機装置22、操舵装置23には、ナビゲーションシステム24がデータ通信可能に接続されており、ナビゲーションシステム24により検出されたデータに基づく信号が、エンジン用電子制御装置4、自動変速機用電子制御装置18、ブレーキ装置19、クルーズコントロール装置20、懸架装置21、補機装置22、操舵装置23に入力され、各装置の制御内容が、ナビゲーションシステム24により検出された情報に基づいて補正・変更可能とされる構成になっている。
【0028】
ナビゲーションシステム24は、電子制御装置25とプレーヤ26と出力装置27と第1情報検出装置28と第2情報検出装置29とを備えている。プレーヤ26と出力装置27と第1情報検出装置28と第2情報検出装置29とが電子制御装置25により制御される。
【0029】
この電子制御装置25は、中央演算処理装置(CPU)および記憶装置(RAM、ROM)並びに入出力インターフェースを主体とするマイクロコンピュータにより構成されている。プレーヤ26は、光ディスクや磁気ディスクなどの情報記録媒体に記憶されている情報を読み取り、かつ、車両の走行予定道路や目的地の入力操作を行うためのものである。
【0030】
前記情報記録媒体には車両の走行に必要な情報、例えば地図、地名、道路、道路周辺の主要建築物などが記憶されているとともに、具体的な道路状況、例えば、直線路、カーブ、登坂、降坂、市街地、山間地、普通道路、高速道路、各道路における道路標識、交通法規などが記憶されている。
【0031】
また、出力装置27はプレーヤ26により読み取られた情報や、目的地までの走行予定道路、走行予定道路の道路状況、自車両の現在位置、他車両の存在およびその位置、障害物の有無やその位置などを画像や音声により出力するためもので、出力装置27にはマルチディスプレイ、スピーカ、ブザー、チャイムなどが含まれる。
【0032】
さらに、第1情報検出装置28は自立航法により自車両の現在位置や道路状況あるいは他車両との車間距離などを検出するためのもので、第1情報検出装置28には、車両の走行する方位を検出する地磁気センサ、ステアリングホイール舵角を検出するステアリングセンサ、道路の勾配を検出する勾配センサ、先行車両の認識や車間距離を検出するビデオカメラ,レーザークルーズ装置,距離センサなどが含まれる。
【0033】
さらにまた、第2情報検出装置29は電波航法により自車両の現在位置、道路状況、他車両、障害物、天候などを検出するためのもので、第2情報検出装置29には、人工衛星からの電波を受信するGPSアンテナ、他車両に搭載されている検出装置としてのナビゲーションシステムの発信機から送信される電波や、路側に設置されているビーコンやサインポストから発信される電波や、VICS(ビークル・インフォメーション&コミュニケーション・システム)、SSVS(スーパー・スマート・ビークル・システム)からの電波を受信するアンテナなどが含まれる。
【0034】
なお、他車両に搭載されているナビゲーションシステムの発信機から送信された電波を、自車両のナビゲーションシステム24により受信する方法としては、他車両から直接受信する方法と、VICSやSSVSを介して間接的に受信する方法とがある。
【0035】
上記エンジン1、自動変速機2、エンジン用電子制御装置4、自動変速機用電子制御装置18、油圧制御回路17、ブレーキ装置19、クルーズコントロール装置20、懸架装置21、操舵装置23などが請求項1および請求項2の挙動制御装置に相当し、ナビゲーションシステム24が請求項1および請求項2の外部情報検出装置に相当する。
【0036】
つぎに、この発明の具体的な制御例を説明する。各制御例において、他車両には、他車両の走行状態、周囲の道路状況、周囲の天候、周囲の障害物などを検出するため、各種のセンサと、上記ナビゲーションシステム24とほぼ同様な検出装置と、各種のセンサおよび検出装置により検出された情報を外部に発信する発信装置とが搭載されていることが前提になる。
【0037】
(第1制御例)
他車両の後方を自車両が追従走行している場合、他車両が急激に減速した場合に備えて車間距離を充分に確保する必要がある。ここで、他車両がブレーキペダルの踏み込みにより減速する場合には、他車両のブレーキランプが点灯するため自車両の運転者は他車両の減速を容易に認識することが可能である。
【0038】
しかしながら、他車両がブレーキペダルの操作以外の操作により減速された場合、例えば他車両に搭載されている自動変速機がマニュアルダウンシフトされ、エンジンブレーキ力が強められて他車両が減速された場合には、自車両の運転者は他車両の減速を迅速に認識することが困難である。その結果、自車両と他車両との車間距離が所期の状態よりも狭められ、ドライバビリティが低下する可能性がある。この第1制御例は上記問題を解決するためのものである。
【0039】
第1制御例を図1のフローチャートに基づいて説明する。まず、運転者により入力された目的地までの走行予定道路がナビゲーションシステム24の出力装置27に出力される。また、第1情報検出装置28または第2情報検出装置29の少なくとも一方により得られる情報に基づいて車両の現在位置が検出され、現在位置が出力装置27に出力される。
【0040】
そして、ナビゲーションシステム24により、車両の走行予定道路の前方の所定距離内に他車両の存在が検出された場合には、他車両の検出装置を介して他車両の走行状態、具体的には自動変速機のシフトレンジ、エンジン回転数、自動変速機の出力軸回転数などの情報が検出される(ステップS11)。
【0041】
そして、ナビゲーションシステム24により、他車両の自動変速機がマニュアルダウンシフトされたか否かが判断される(ステップS12)。ステップS12で肯定判断された場合は、他車両のエンジンブレーキ力が強められて減速する可能性がある。そこで、まず、自車両の自動変速機2の変速段を他車両の変速段と同一の変速段までダウンシフトすれば所定の車間距離を維持できるか否かが判断される(ステップS13)。つまり、自車両の自動変速機2の減速度と、他車両の自動変速機の減速度とが同一であるとは限らないため、両者の減速度に基づいて所定の車間距離を維持できるように自車両の減速度を制御するためである。
【0042】
ステップS13で肯定判断された場合は、自車両の自動変速機2が他車両の自動変速機と同一の変速段にダウンシフトされ、自車両のエンジンブレーキ力が強められて減速される(ステップS14)。一方、ステップS13で否定判断された場合は、他車両と同一の変速段まで自車両の自動変速機2をダウンシフトさせなくても車間距離を維持可能であるため、自車両の自動変速機2が他車両よりも1段高い変速段にダウンシフトされて自車両が減速され、他車両の減速を自車両の運転者に警告する(ステップS15)。
【0043】
ステップS14またはステップS15の制御についで、他車両のダウンシフト後におけるエンジン回転数が所定値を超えているか否かが判断される(ステップS16)。ステップS16で肯定判断された場合は、他車両に所定値以上の強いエンジンブレーキ力が生じて急激な減速が予想されるため、ブレーキ装置19に信号が入力されて自車両をブレーキ装置19の制動力により減速させる制御が行われ、他車両の急減速が自車両の運転者に警告される(ステップS17)。なお、運転者によりブレーキペダルが既に踏み込まれていた場合は、ブレーキ装置19のホイールシリンダに作用する油圧を一層高める制御が行われる。
【0044】
また、ステップS16で否定判断された場合は他車両がエンジンブレーキ力により急減速する可能性がないためリターンされる。なお、ステップS12で否定判断された場合は、ステップS13ないしステップS17の制御が行われることなくリターンされる。上記ステップS11,S12が請求項1および2のシフト情報検出手段に相当し、ステップS13ないしS17が請求項1の挙動制御手段に相当する。そのうちステップS16およびS17が請求項2の挙動制御手段に相当する。
【0045】
このように、他車両に搭載されている自動変速機がマニュアルシフト操作された場合には、他車両のブレーキランプが点灯することなくエンジンブレーキ力により他車両が減速されるため、自車両の運転者は他車両の減速を迅速に認識することが困難であるが、この第1制御例によれば他車両のマニュアルダウンシフトに対応して自車両の自動変速機2が自動的にダウンシフトされる。
【0046】
したがって、他車両がエンジンブレーキ力により減速されるのとほぼ同時に自車両のエンジンブレーキ力を強めて減速させる制御を行うことが可能になり、他車両と自車両との車間距離が所期の状態に維持されてドライバビリティが向上する。
【0047】
(第2制御例)
自車両が他車両の後方を追従して走行中に、他車両のブレーキ装置が動作されて減速したり、アクセルペダルの踏み込みにより加速したりした場合、自車両と他車両との車間距離を所期の状態に維持できなくなる場合がある。第2制御例は上記問題を解決するためのものである。
【0048】
図2は第2制御例を示すフローチャートであり、ナビゲーションシステム24により、自車両の前方を走行している他車両の走行状態、具体的にはブレーキ装置の動作およびアクセルペダルの操作情報が検出される(ステップS21)。そして、他車両でブレーキ装置の動作の有無が判断され、ブレーキ装置が動作された場合は他車両のホイールシリンダに作用するブレーキ油圧が所定値1を超えているか否かが判断される(ステップS22)。なお、ブレーキ油圧のほか、ブレーキペダルスイッチやストップランプスイッチのオン・オフを判断基準にすることも可能である。
【0049】
ステップS22で肯定判断された場合は、他車両が所定の減速度に到達して他車両と自車両との車間距離が狭められる可能性があるため、自動変速機2をダウンシフトさせる制御が行われ、エンジンブレーキ力が強められて車両が減速され、他車両の減速が自車両の運転者に警告される(ステップS23)。
【0050】
ついで、他車両のブレーキ油圧が所定値2を超えているか否かが判断される(ステップS24)。この所定値2は所定値1よりも大きい値に設定されている。つまり、ステップS24は、ステップS23で行われたダウンシフト制御によるエンジンブレーキ力だけで自車両と他車両との車間距離を所期の状態に維持できるかどうかを確実に判定するために行われる。
【0051】
ステップS24で肯定判断された場合は、自車両のエンジンブレーキ力による減速度では不十分であり、他車両との車間距離が狭められる可能性があるため、ブレーキ装置19が制御されて自車両の減速度が増大され(ステップS25)、リターンされる。なお、運転者によりブレーキ装置19が既に操作されていた場合は、ホイールシリンダに作用するブレーキ油圧を高める制御が行われる。なお、ステップS25において、ブレーキ装置19のホイールシリンダに作用する油圧は、他車両のブレーキ油圧、他車両の減速度、自車両の減速度、自車両と他車両との車間距離などの条件に基づいて制御される。
【0052】
また、ステップS24で否定判断された場合は、自動変速機2のダウンシフトにより生じるエンジンブレーキ力で、車間距離を所期の状態に維持することが可能であるためリターンされる。
【0053】
さらに、ステップS22で否定判断された場合は、ナビゲーションシステム24により、他車両のアクセルペダルの踏み込み量およびスロットルバルブの開度が、所定値3を超えているか否かが判断される(ステップS26)。ステップS26で肯定判断された場合は、他車両が急加速される可能性があるため、自車両の自動変速機2をダウンシフトさせる制御が行われ(ステップS27)、アクセルペダル3の踏み込みにより自車両の加速性能を高めることが可能な状態になる。したがって、他車両と自車両との車間距離を所期の状態に維持したまま、追従走行を継続させることができる。
【0054】
なお、ステップS26で否定判断された場合は、他車両が急加速される可能性がなく、自車両の挙動制御装置の制御状態をそのまま維持すれば、他車両と自車両との車間距離を所期の状態に保つことが可能であるためリターンされる。
【0055】
このように、第2制御例によれば、自車両が他車両の後方を追従走行中に、他車両のブレーキ装置の動作が検出された場合には、自動的に自車両の自動変速機2のダウンシフト制御またはブレーキ装置19のブレーキ油圧制御が実行されて自車両の減速性能が高められる。
【0056】
一方、他車両のアクセルペダルが踏み込まれた場合には、自動的に自動変速機2がダウンシフト制御され、アクセルペダル3の踏み込みにより加速性能が高められる。したがって、自車両の前方の他車両が減速する場合または加速する場合のいずれにおいても、自動的に自車両と他車両との車間距離を所期の状態に維持したまま追従走行を継続することができ、ドライバビリティが向上する。
【0057】
(第3制御例)
自車両が他車両の後方を追従走行中に、他車両のブレーキ装置が動作して減速されたり、アクセルペダルの踏み込みにより加速されたりすると、自車両と他車両との車間距離を所期の状態に維持できなくなる。第3制御例は上記問題を解決するためのものである。なお、第2制御例では、他車両のブレーキ装置の動作またはアクセルペダルの操作状態を基準にして自車両の挙動を制御しているのに対し、第3制御例では他車両の加速度および減速度を基準にして自車両の挙動を制御している点が相違する。
【0058】
図3は第3制御例を示すフローチャートであり、ナビゲーションシステム24により、他車両の加速度および減速度、言い換えれば車速が検出され(ステップS31)、他車両の減速度が所定値1を超えているか否かが判断される(ステップS32)。ステップS32で肯定判断された場合は、他車両と自車両との車間距離が狭められる可能性があるため、自動変速機2を自動的にダウンシフトさせる制御が行われ、エンジンブレーキ力により自車両が減速して他車両の減速が自車両の運転者に警告される。(ステップS33)。
【0059】
ついで、他車両の減速度が所定値2を超えているか否かが判断される(ステップS34)。この所定値2は所定値1よりも大きい値に設定されている。つまり、ステップS34は、ステップS33で行われたダウンシフト制御によるエンジンブレーキ力だけで自車両と他車両との車間距離を所期の状態に維持できるかどうかを確実に判定するために行われる。
【0060】
ステップS34で肯定判断された場合は、自車両のエンジンブレーキ力による減速度では不十分であり、他車両との車間距離がさらに狭められる可能性があるため、ブレーキ装置19が制御されることで自車両の減速度が増大され(ステップS35)、リターンされる。なお、運転者によりブレーキ装置19が既に操作されていた場合は、ホイールシリンダに作用するブレーキ油圧を高める制御が行われる。
【0061】
また、ステップS34で否定判断された場合は、自動変速機2のダウンシフトにより生じるエンジンブレーキ力で所期の車間距離を維持することが可能であるため、リターンされる。
【0062】
さらに、ステップS32で否定判断された場合は、ナビゲーションシステム24により、他車両の加速度が所定値3を超えているか否かが判断される(ステップS36)。ステップS36で肯定判断された場合は、他車両と自車両との車間距離が所定以上に広がる可能性があるため、自車両の自動変速機2を自動的にダウンシフトさせる制御が行われ(ステップS37)、自車両のアクセルペダル3を踏み込めば自車両の加速性能が高められる。このため、他車両と自車両との車間距離を所期の状態に維持したまま、追従走行を継続させることが可能になる。
【0063】
なお、ステップS36で否定判断された場合は、他車両が急加速される可能性がなく、自車両の挙動制御装置の制御状態を維持することで他車両と自車両との車間距離を所期の状態に保つことが可能であるため、そのままリターンされる。
【0064】
このように、第3制御例によれば、自車両が他車両の後方を追従走行中に、他車両に所定の減速度が検出された場合には、自動的に自車両の自動変速機2のダウンシフト制御またはブレーキ装置19のブレーキ油圧制御が実行されて自車両の減速性能が高められる。
【0065】
一方、他車両に所定値を超える加速度が検出された場合は、自動的に自動変速機2がダウンシフト制御されて加速性能が高められる。したがって、自車両の前方の他車両が減速する場合または加速する場合のいずれにおいても、自動的に自車両と他車両との車間距離を所期の状態に維持したまま追従走行を継続することが可能になり、ドライバビリティが向上する。
【0066】
(第4制御例)
自車両が道路を走行中に、路面の凍結や積雪などにより摩擦係数の低い場所があると、車輪がスリップして操縦安定性が低下する可能性がある。一方、ABS(アンチロクブレーキシステム)機能を備えた車両であれば、低摩擦係数路を走行する場合には、各車輪の回転速度差に基づいた制動力が各車輪に与えられ、車輪のスリップを抑制できるため、操縦安定性を維持することが比較的容易である。
【0067】
しかしながら、上記ABS機能は車両が実際に低摩擦係数路にさしかかってある程度車輪のスリップが生じてからでなければ機能しないため、スリップそのものを未然に防止するような制御を行い得なかった。第4制御例は上記問題を解決するためのものである。
【0068】
図4は第4制御例を示すフローチャートであり、他車両で検出された路面の摩擦係数μの情報がナビゲーションシステム24により検出され(ステップS41)、検出された摩擦係数μが所定値α未満であるか否かが判断される(ステップS42)。ステップS42で否定判断された場合は、自車両の駆動力のままで車輪のスリップが生じる可能性が少ないため、リターンされる。
【0069】
ステップS42で肯定判断された場合は、自車両の駆動力を維持した状態で走行すれば、前方の低摩擦係数路で車輪のスリップが生じる可能性があるため、自車両の車速が所定値β未満であるか否かが判断される(ステップS43)。
【0070】
ステップS43で肯定判断された場合は、自車両が低摩擦係数路を走行する際に自動変速機2の変速段を第1速にダウンシフトすることが禁止されるとともに、自車両が低摩擦係数路で停車した場合には、次回の発進時に自動変速機2の変速段を第2速に設定する制御が行われ(ステップS44)、リターンされる。
【0071】
また、ステップS43で否定判断された場合は、自車両が低摩擦係数路に到達する前に自動変速機2をダウンシフトして減速を促す制御が行われ(ステップS45)、リターンされる。
【0072】
このように、第4制御例によれば、他車両により検出される低摩擦係数路の情報に基づいて、自車両の自動変速機2が自動的に制御されて自車両の車輪の駆動力や車速が可及的に抑制される。したがって、自車両が低摩擦係数路に到達する前に、自車両の駆動力を可及的に抑制することで車輪のスリップを未然に防止することができ、操縦安定性が向上する。また、自車両が低摩擦係数路で停車した状態から発進する場合、駆動力が可及的に抑制されて車輪のスリップを未然に防止することができ、操縦安定性が向上する。
【0073】
(第5制御例)
車両の走行中は天候により操縦安定性や前方の視認性が大きく左右される。つまり、雨天時には路面が濡れて車輪がスリップしやすくなるうえ、フロントウィンドガラスが濡れて前方の視認性が低下する。また、霧が発生した場合には、自車両の周囲の視認性が低下するばかりでなく、自車両の周囲に存在する他車両や歩行者から自車両が認識されにくくなり、自車両と他車両、歩行者、障害物とが接近しすぎる可能性がある。
【0074】
さらに、車両が走行中に突風が生じ、この突風が車両の側面に吹き付けられた場合には、風圧によって車両に回頭モーメントが生じる。このように、いずれの場合にも操縦安定性や視認性あるいはドライバビリティが低下する可能性がある。特に、自車両がトンネル内を走行している場合は、トンネルの出口側の天候を予測できないため、上記問題が一層顕著なものになる。第5制御例は上記問題を解決するためのものである。
【0075】
図5は第5制御例を示すフローチャートである。この制御例では他車両が雨滴を感知するセンサや、横風による車両挙動を検出するヨーレイトセンサを備えていることが前提になる。まず、自車両の前方を走行している他車両で検出された天候情報がナビゲーションシステム24により検出される(ステップS51)。
【0076】
ここで対象となる他車両は、他車両の直近に位置している車両よりも所定距離を隔てた位置を走行している車両や、自車両が到達するまでに所定時間を要する箇所に位置している車両を対象にすることが望ましい。その理由は、自車両の走行位置からでは確認できない走行予定経路の前方の天候情報が得られるからである。
【0077】
ステップS52で肯定判断された場合は、路面が濡れて摩擦係数が低くなり、かつ、フロントウィンドガラスが濡れる可能性があるため、事前に自動変速機2が自動的にダウンシフト制御されて減速を促し、かつ、補機装置22のワイパーが動作され(ステップS53)、リターンされる。したがって、車輪のスリップが未然に防止されて操縦安定性が維持されるとともに、フロントウィンドガラスの水が除去されて視認性が維持されて、周囲の他車両、歩行者、障害物を認識しやすくなる。
【0078】
また、ステップS52で否定判断された場合は、他車両の周囲で霧が発生しているが否かが判断され(ステップS54)、ステップS54で肯定判断された場合は、事前に自動変速機2が自動的にダウンシフト制御されて減速を促し、かつ、補機装置22のフォグランプが点灯され(ステップS55)、リターンされる。したがって、自車両の周囲の他車両、歩行者、障害物を認識しやすくなり、これらの物体との距離や相対位置を所期の状態に維持できる。
【0079】
さらに、ステップS54で否定判断された場合は、他車両が突風を受けているか否かが判断され(ステップS56)、ステップS56で肯定判断された場合は、事前に自動変速機2が自動的にダウンシフト制御されて減速を促し、かつ、懸架装置21のショックアブソーバの減衰力、またはエアスプリングの減衰力やばね定数を高める、言い換えればハード化する制御が行われ(ステップS57)、リターンされる。したがって、自車両が横風を受けた場合において、その風圧により車両に回頭モーメントが生じることを抑制でき、操縦安定性およびドライバビリティが向上する。
【0080】
なお、ステップS53,S55,S57の制御内容は、天候が検出された時点で即座に実行する必要性はなく、検出された天候に対して自車両が所定位置に到達してから各制御を実行すれば効果的である。なお、この制御例では、操舵装置23のステアリングハンドルの操舵力を制御することも可能である。
【0081】
このように、第5制御例によれば、自車両の前方を走行している他車両により検出された天候情報をナビゲーションシステム24により検出しているため、自車両の走行位置では認識できない天候を事前に検出でき、その天候情報に基づいて自車両の挙動制御装置を制御することが可能になる。したがって、自車両が現地の天候に遭遇する前に自車両の挙動を天候に合致したものに設定することができ、自車両の操縦安定性や視認性、ならびにドライバビリティを向上させることができる。特に、トンネルの出口や山間部の天候急変箇所などでの操縦安定性やドライバビリティの向上に一層有効である。
【0082】
(第6制御例)
自車両が他車両の後方を追従して走行中に、他車両がワインディング路や低摩擦係数路に到達した場合に、自車両が各道路状況に到達してから挙動の制御が行われたのでは、他車両と自車両との挙動に差異が生じてしまい、自車両と他車両との車間距離が所期の状態に維持できなくなる可能性がある。第6制御例はこの問題を解決するためになされたものである。
【0083】
図6は第6制御例を示すフローチャートである。まず、他車両で検出された道路情報がナビゲーションシステム24により検出される(ステップS61)。そして、他車両で自動変速機の第4速を禁止する制御が行われているか否かが判断され(ステップS62)、ステップS62で肯定判断された場合は他車両がワインディング路にさしかかった可能性があるため、自動的に自動変速機2の第4速を禁止して減速を促す制御が行われ(ステップS63)、リターンされる。
【0084】
また、ステップS62で否定判断された場合は、他車両で自動変速機の第1速を禁止する制御が行われているか否かが判断される(ステップS64)。ステップS64で肯定判断された場合は、前方に低摩擦係数路が存在している可能性があるため、自動的に自動変速機2の第1速を禁止して車両の駆動力を抑制する制御が行われ(ステップS65)、リターンされる。なお、ステップS64で否定判断された場合はそのままリターンされる。
【0085】
このように、第6制御例によれば、自車両の前方を走行している他車両により検出されている道路情報と、他車両の挙動制御内容とをナビゲーションシステム24により事前に検出することが可能である。したがって、他車両がニューラルネットワーク制御やファジー制御により行っている挙動制御を、自車両が道路状況の変化する場所に到達する前に受信して、自車両の挙動を他車両の制御内容とほぼ同様に制御することが可能であり、ドライバビリティが向上する。
【0086】
なお、上記第1制御例ないし第6制御例は、複数の制御例を組み合わせて行うことも可能である。また、第1制御例,第4制御例,第5制御例,第6制御例は、自車両の走行予定経路の前方に位置する車両であれば、直近の他車両以外の車両を対象にすることができる。そして、検出された情報の発生時刻に基づいて、自車両がその道路状況に到達した際に自車両の挙動制御装置を制御すればほぼ同様の作用効果を得られる。
【0087】
さらに、上記各制御例においては、他車両によって検出された情報を自車両で受信する構成を採用しているため、自車両に装備されたシステムでは検出することが不可能な情報、例えば摩擦係数などを得ることが可能であり、自車両の挙動制御装置を制御するための条件が拡大され、一層適切な挙動制御が可能になる。さらにまた、第3制御例は他車両の加減速度を検出し、その検出結果に基づいて自車両の挙動制御装置を制御するものであるため、最低限、他車両の加減速度を検出できるレーザークルーズを装備していれば実施可能である。
【0088】
また、この発明は公知の無段変速機構を備えた自動変速機を搭載した車両にも適用可能である。また、この発明は、エンジンに代えて電動モータが搭載された電気自動車、または電動モータおよびエンジンが搭載されたハイブリッド車にも適用可能である。電動モータが用いられた場合は、電動モータの回生制動力により駆動力が低減される。また、電動モータが用いられた場合は、電動モータに供給する電流を制御することにより出力トルクの増減を行うことが可能である。
【図面の簡単な説明】
【0089】
【図1】この発明の第1制御例を示すフローチャートである。
【図2】この発明の第2制御例を示すフローチャートである。
【図3】この発明の第3制御例を示すフローチャートである。
【図4】この発明の第4制御例を示すフローチャートである。
【図5】この発明の第5制御例を示すフローチャートである。
【図6】この発明の第6制御例を示すフローチャートである。
【図7】この発明が適用された車両のシステムを示すブロック図である。
【符号の説明】
【0090】
1…エンジン、 2…自動変速機、 3…アクセルペダル、 4…エンジン用電子制御装置、 17…油圧制御回路、 18…自動変速機用電子制御装置、 19…ブレーキ装置、 20…クルーズコントロール装置、 21…懸架装置、 23…操舵装置、 24…ナビゲーションシステム。
【特許請求の範囲】
【請求項1】
自車両の挙動を制御する挙動制御装置と、他車両の情報を当該他車両に搭載されている検出装置を介して検出する外部情報検出装置とを備え、この外部情報検出装置により検出された情報に基づいて前記挙動制御装置の制御が行われる車両の制御装置において、
前記外部情報検出装置により前記他車両の自動変速機のシフト情報を検出するシフト情報検出手段と、
このシフト情報検出手段により前記他車両の自動変速機のマニュアルダウンシフトが検出された場合に、前記自車両の自動変速機の変速段を前記他車両の自動変速機の変速段と同一の変速段までダウンシフトすれば所定の車間距離を維持できるか否かを判断し、肯定された場合には、前記自車両の自動変速機の変速段を前記他車両の自動変速機の変速段と同一の変速段にダウンシフトし、否定判断された場合には、前記自車両の自動変速機の変速段を前記他車両の自動変速機の変速段よりも1段高い変速段にダウンシフトするとともに前記他車両の減速を前記自車両の運転者に警告する挙動制御手段とを備えていることを特徴とする車両の制御装置。
【請求項2】
前記外部情報検出装置により前記他車両のエンジン回転数を検出するエンジン回転数検出手段を更に備え、
前記挙動制御手段は、前記シフト情報検出手段により前記他車両の自動変速機のマニュアルダウンシフトが検出され、かつ前記エンジン回転数検出手段により検出された前記他車両のエンジン回転数が所定値よりも大きい場合に、前記自車両をブレーキ装置の制動力により減速制御する手段を含むことを特徴とする請求項1に記載の車両の制御装置。
【請求項1】
自車両の挙動を制御する挙動制御装置と、他車両の情報を当該他車両に搭載されている検出装置を介して検出する外部情報検出装置とを備え、この外部情報検出装置により検出された情報に基づいて前記挙動制御装置の制御が行われる車両の制御装置において、
前記外部情報検出装置により前記他車両の自動変速機のシフト情報を検出するシフト情報検出手段と、
このシフト情報検出手段により前記他車両の自動変速機のマニュアルダウンシフトが検出された場合に、前記自車両の自動変速機の変速段を前記他車両の自動変速機の変速段と同一の変速段までダウンシフトすれば所定の車間距離を維持できるか否かを判断し、肯定された場合には、前記自車両の自動変速機の変速段を前記他車両の自動変速機の変速段と同一の変速段にダウンシフトし、否定判断された場合には、前記自車両の自動変速機の変速段を前記他車両の自動変速機の変速段よりも1段高い変速段にダウンシフトするとともに前記他車両の減速を前記自車両の運転者に警告する挙動制御手段とを備えていることを特徴とする車両の制御装置。
【請求項2】
前記外部情報検出装置により前記他車両のエンジン回転数を検出するエンジン回転数検出手段を更に備え、
前記挙動制御手段は、前記シフト情報検出手段により前記他車両の自動変速機のマニュアルダウンシフトが検出され、かつ前記エンジン回転数検出手段により検出された前記他車両のエンジン回転数が所定値よりも大きい場合に、前記自車両をブレーキ装置の制動力により減速制御する手段を含むことを特徴とする請求項1に記載の車両の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−50886(P2007−50886A)
【公開日】平成19年3月1日(2007.3.1)
【国際特許分類】
【出願番号】特願2006−237923(P2006−237923)
【出願日】平成18年9月1日(2006.9.1)
【分割の表示】特願平8−330362の分割
【原出願日】平成8年11月26日(1996.11.26)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成19年3月1日(2007.3.1)
【国際特許分類】
【出願日】平成18年9月1日(2006.9.1)
【分割の表示】特願平8−330362の分割
【原出願日】平成8年11月26日(1996.11.26)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]