
車両の制御装置
【課題】エンジンの燃費をより向上させることのできる、車両の制御装置を提供する。
【解決手段】エンジンおよび変速機を有し、変速機でいずれかの変速比を達成するときに係合され、かつ、変速機の入力部材と出力部材とを動力伝達可能に接続する係合要素を備えた、車両の制御装置において、エンジンの効率が基準値を満たすか否かを判断する効率判断手段(ステップS2)と、エンジンの効率が基準値を満たさないと判断された場合は、係合要素の滑りにより生じる動力損失を推定し、かつ、エンジン回転数の変化により生じるエンジン効率の向上分を推定する推定手段(ステップS3)と、動力損失分とエンジン効率の向上分とを比較して、何れが大きいかを判断する比較手段(ステップS4)と、動力損失分よりもエンジン効率の向上分の方が大きいと判断された場合に、係合要素を滑らせてエンジン回転数を変化させる滑り制御手段(ステップS5)とを備えている。
【解決手段】エンジンおよび変速機を有し、変速機でいずれかの変速比を達成するときに係合され、かつ、変速機の入力部材と出力部材とを動力伝達可能に接続する係合要素を備えた、車両の制御装置において、エンジンの効率が基準値を満たすか否かを判断する効率判断手段(ステップS2)と、エンジンの効率が基準値を満たさないと判断された場合は、係合要素の滑りにより生じる動力損失を推定し、かつ、エンジン回転数の変化により生じるエンジン効率の向上分を推定する推定手段(ステップS3)と、動力損失分とエンジン効率の向上分とを比較して、何れが大きいかを判断する比較手段(ステップS4)と、動力損失分よりもエンジン効率の向上分の方が大きいと判断された場合に、係合要素を滑らせてエンジン回転数を変化させる滑り制御手段(ステップS5)とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、エンジンに接続された動力伝達経路に、変速比を段階的に制御することのできる有段変速機が設けられている、車両の制御装置に関するものである。
【背景技術】
【0002】
一般に、エンジンから車輪に至る動力伝達経路に、変速比を段階的に制御することのできる有段変速機が設けられた車両が知られており、その一例が特許文献1に記載されている。この特許文献1に記載された車両では、エンジンの出力側に変速機が設けられており、その変速機は、3組の遊星歯車装置と、4つのクラッチおよび2つのブレーキを有している。そして、ドライブポジションが選択された場合は、変速機で第1速ないし第8速を選択的に切り替え可能であり、リバースポジションが選択された場合は、変速機で2種類の後進段を選択可能である。このように構成することにより、変速機の変速段の多段化が実現され、変速比の幅を大きく取ることができ、滑らかな変速特性を得られ、エンジンの燃費が向上するとされている。なお、多段式の変速機を有する車両の制御装置は、特許文献2ないし特許文献4にも記載されている。
【0003】
【特許文献1】特開2005−273768号公報
【特許文献2】特開2007−292227号公報
【特許文献3】特開2004−322935号公報
【特許文献4】特開2004−100941号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されている多段変速機では、車速の変化に対してエンジン回転数がステップ的に変化するため、エンジンの燃焼効率が良好な運転状態を必ずしも使用することができず、その点で改善の余地が残されていた。
【0005】
この発明は、上記の技術的課題に着目してなされたものであり、エンジンの燃費をより向上させることのできる、車両の制御装置を提供することを目的とするものである。
【課題を解決するための手段】
【0006】
上記の目的を達成するために請求項1の発明は、燃料を燃焼させて動力を発生するエンジンと、このエンジンから出力される動力の伝達経路に配置され、かつ、入力回転数と出力回転数との間の変速比を段階的に変更可能な変速機と、この変速機でいずれかの変速比を達成するときに係合され、かつ、前記変速機の入力部材と出力部材とを動力伝達可能に接続する係合要素とを備えた、車両の制御装置において、前記エンジンの燃焼効率が、相対的に高いことを表す値として予め定められた基準値を満たすか否かを判断する効率判断手段と、前記エンジンの燃焼効率が基準値を満たさないと判断された場合は、前記変速機でいずれかの変速比を設定するときに係合させる係合要素を滑らせてエンジン回転数を変化させることを想定して、その係合要素の滑りにより生じる動力損失を推定し、かつ、エンジン回転数の変化により生じるエンジンの燃焼効率の向上分を推定する推定手段と、前記推定手段により推定された動力損失分と、前記推定手段により推定されたエンジンの効率の向上分とを比較して、何れが大きいかを判断する比較手段と、この比較手段により、前記動力損失分よりも前記エンジンの燃焼効率の向上分の方が大きいと判断された場合に、前記係合要素を滑らせてエンジン回転数を変化させる滑り制御手段とを備えていることを特徴とするものである。
【0007】
請求項2の発明は、請求項1の構成に加えて、前記エンジンから車輪に至る動力の伝達経路に、電気エネルギを運動エネルギに変換する力行と、運動エネルギを電気エネルギに変換する回生とをおこなうことのできるモータ・ジェネレータが設けられており、前記車両における前後方向の要求駆動力に基づいて、前記エンジンの必要出力を求める必要出力算出手段を有し、前記効率判断手段は、前記エンジン回転数およびエンジントルクを用いて前記エンジンの燃焼効率が前記基準値を満たすか否かを判断し、かつ、前記エンジン回転数およびエンジントルクで表される実出力が前記必要出力を満たすか否かを判断する手段を含み、前記エンジン回転数およびエンジントルクが前記基準値を満たしておらず、かつ、前記実出力が前記必要出力を満たさないと判断された場合に、前記滑り制御手段は、係合要素を滑らせ、かつ、前記必要出力と前記実出力との差を相対的に少なくするように、前記モータ・ジェネレータを力行または回生する手段を含むことを特徴とするものである。
【発明の効果】
【0008】
請求項1の発明によれば、エンジンの燃焼効率が基準値を満たさないと判断された場合は、係合要素を滑らせてエンジン回転数を変化させることを想定して、その係合要素の滑りにより生じる動力損失を推定し、かつ、エンジン回転数の変化により生じるエンジンの燃焼効率の向上分を推定する。そして、推定された動力損失分と、推定されたエンジンの燃焼効率の向上分とを比較して、何れが大きいかを判断する。さらに、動力損失分よりもエンジンの燃焼効率の向上分の方が大きいと判断された場合は、係合要素を滑らせてエンジン回転数を変化させる。したがって、エンジンの燃焼効率を向上できる。
【0009】
請求項2の発明によれば、請求項1の発明と同様の効果を得られる他に、車両における前後方向の要求駆動力に基づいて、エンジンの必要出力を求める。また、エンジンの実出力が必要出力を満たすか否かを判断する。さらに、エンジンの実出力が必要出力を満たさず、かつ、エンジンの燃焼効率が基準値を満たしていないと判断された場合は、係合要素を滑らせ、かつ、必要出力とエンジンの実出力との差を相対的に小さくするように、モータ・ジェネレータを力行または回生する。したがって、エンジンの燃焼効率を向上でき、かつ、車両における要求駆動力と、実駆動力との差を相対的に少なくすることができ、ドライバビリティが向上する。
【発明を実施するための最良の形態】
【0010】
この発明における変速機は、エンジンから車輪に至る動力伝達経路に配置される伝動装置であり、入力回転数と出力回転数との間の変速比を段階的に変更可能な有段変速機である。有段変速機で選択可能な変速比の数(変速段)は、2段以上あれば何れの変速段でもよい。この有段変速機としては、歯車変速機を用いることができ、例えば、遊星歯車式変速機、または選択歯車式変速機を用いることができる。この発明における係合要素は係合および解放が可能であり、係合要素が係合または解放されて、変速機でいずれかの変速比を達成することができる。また、係合要素が係合されると、変速機の入力部材と出力部材とが動力伝達可能に接続される。この発明の係合要素にはクラッチおよびブレーキが含まれる。クラッチには、摩擦力または電磁力により動力伝達をおこなうクラッチが含まれる。ブレーキには、摩擦力または電磁力により制動力を生じるブレーキが含まれる。この発明における係合要素は、滑り制御をおこなうことが可能に構成されている。つまり、トルク容量を無段階に変更可能である。この発明の入力部材および出力部材は、動力伝達をおこなう回転要素であり、入力部材および出力部材には、回転軸、ギヤ、キャリヤ、コネクティングドラム、スプロケット、チェーン、プーリ、ベルトなどが含まれる。この発明における車輪は、前輪または後輪のいずれでもよい。
【0011】
この発明では、係合要素を滑らせて、係合要素の係合により動力伝達可能に接続される回転要素同士に回転数差を生じさせることができる。例えば、係合要素が係合されて変速機で所定の変速段が選択されているときに、その変速段を設定するために係合されている係合要素を滑らせることにより、エンジン回転数を上昇させてエンジンの燃費を向上することができる。また、係合要素が係合されて変速機で所定の変速段が選択されている場合に、その変速段よりも変速比の小さい変速段を設定するときに、解放される係合要素は解放し、かつ、係合される係合要素を滑らせつつ係合することにより、エンジン回転数を低下させて、エンジンの燃費を向上することもできる。また、この発明において、エンジンから車輪に至る経路にモータ・ジェネレータが設けられている。さらに、エンジンから車輪に至る動力の伝達方向で、係合要素の上流または下流の何れにモータ・ジェネレータが配置されていてもよい。
【0012】
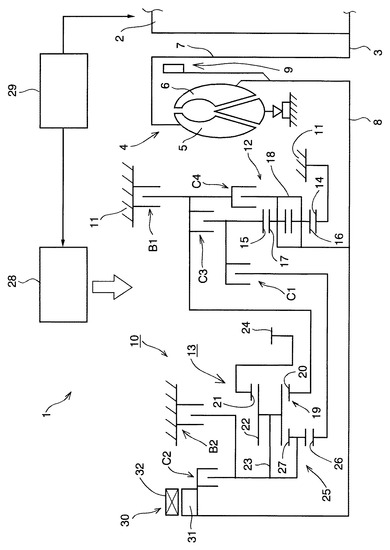
つぎに、この発明の具体例を図2に基づいて説明する。この発明で対象とする車両1には、走行用の動力源としてエンジン2が搭載されている。このエンジン2は、燃料を燃焼させて動力を発生する動力装置であり、エンジン2としては内燃機関、例えば、ガソリンエンジンまたはディーゼルエンジンまたはLPGエンジンなどを用いることができる。このエンジン2においては、吸気管に電子スロットルバルブが設けられており、この吸気管を経由して燃焼室に空気が吸入される。この燃焼室で燃料が燃焼して発生した熱エネルギが、クランクシャフト3の回転運動に変換される構成である。車両1の室内には運転者が操作するアクセルペダルが設けられており、そのアクセルペダルの踏み込み量を表すアクセル開度、またはアクセル開度に関わりなく、電子スロットルバルブの開度を調整することにより、エンジン2の出力トルクを制御可能である。また、エンジン2には点火装置および燃料噴射装置が設けられており、点火時期または燃料噴射量を制御することにより、エンジントルクを制御可能である。
【0013】
このエンジン2のクランクシャフト3と動力伝達可能な流体伝動装置4が設けられている。この流体伝動装置4は、流体の運動エネルギにより動力伝達をおこなうことのできる装置である。この流体伝動装置4は、ポンプインペラ5およびタービンランナ6を有しており、ポンプインペラ5が、フロントカバー7を介在させてクランクシャフト3と動力伝達可能に、具体的には一体的に回転するように連結されている。また、タービンランナ6にはインプットシャフト8が動力伝達可能に接続されている。さらに、インプットシャフト8とフロントカバー7との間で、摩擦力により動力伝達をおこなうことのできるロックアップクラッチ9が設けられている。このロックアップクラッチ9は、油圧により動作が制御されて、フロントとカバー7に係合、またはフロントカバー7から解放される構成である。このロックアップクラッチ9をスリップ制御すると、そのトルク容量を無段階で制御可能である。また、ロックアップクラッチ9が解放されている場合、トルク増幅することが可能である。
【0014】
さらに、インプットシャフト8はクランクシャフト3と同軸上に配置されており、クランクシャフト3から車輪(図示せず)に至る動力伝達経路には変速機10が設けられている。この変速機10は、中空のケーシング11の内部に設けられている。この変速機10は、入力回転数と出力回転数との間の比、すなわち変速比を段階的に(不連続に)変更可能な有段式変速機である。この具体例では、有段変速機として、複数組の変速部を有する自動変速機が用いられている。具体的には、変速機10は、第1の変速部12および第2の変速部13を有している。第1の変速部12は副変速部を構成するものであり、この第1の変速部12はダブルピニオン型の遊星歯車機構により構成されている。この第1の変速部12は、外歯であるサンギヤ14と、このサンギヤ14と同軸上に配置された内歯であるリングギヤ15と、サンギヤ14に噛合されたピニオンギヤ16と、このピニオンギヤ16およびリングギヤ15に噛合されたピニオンギヤ17と、2種類のピニオンギヤ16,17をそれぞれ自転可能に、かつ、一体的に公転可能に支持するキャリヤ18とを有している。このように、第1の変速部12は、相互に差動回転可能に接続された3個の回転要素、つまり、サンギヤ14およびリングギヤ15およびキャリヤ18を有している。また、前記サンギヤ14は回転しない状態で前記ケーシング11に固定されている。
【0015】
さらに、インプットシャフト8の外周側に第2の変速部13が配置されている。この第2の変速部13は主変速部を構成するものであり、この第2の変速部13は複数組の遊星歯車機構により構成されている。第2の変速部13を構成する第1の遊星歯車機構19は、同軸上に配置された第1サンギヤ20およびリングギヤ21と、第1サンギヤ20およびリングギヤ21に噛合されたロングピニオンギヤ22と、このロングピニオンギヤ22を、自転かつ公転可能に支持したキャリヤ23とを有している。上記のように、第1の遊星歯車機構19は、相互に差動回転可能に接続された3個の回転要素、つまり、第1サンギヤ20およびリングギヤ21および23キャリヤを有している。なお、リングギヤ21と一体回転する出力ギヤ24が設けられている。この出力ギヤ24には車輪が動力伝達可能に接続されている。
【0016】
さらに、第2の変速部13の一部を構成する第2の遊星歯車機構25は、第1サンギヤ20と同軸に配置され、かつ、第1サンギヤ20よりも歯数が少ない第2サンギヤ26と、第2サンギヤ26およびロングピニオンギヤ22に噛合されたショートピニオンギヤ27と、前記ロングピニオンギヤ22およびショートピニオンギヤ27をそれぞれ自転可能、かつ、一体的に公転可能に支持するキャリヤ23とを有している。つまり、第2の変速部13のキャリヤ23は、第1の遊星歯車機構19および第2の遊星歯車機構25で共用化されている。このように、第2の変速部13は、第1の遊星歯車機構19および第2の遊星歯車機構25により構成されたラビニョ型の遊星歯車機構である。
【0017】
つぎに、第1の変速部12および第2の変速部13に含まれる回転要素同士を相互に接続または解放する係合要素としてのクラッチ、および回転要素を選択的に停止(固定)する係合要素としてのブレーキについて説明する。まず、前記リングギヤ15と第2サンギヤ26とを選択的に接続または解放する第1クラッチC1が設けられている。また、前記キャリヤ23とインプットシャフト8とを選択的に接続または解放する第2クラッチC2が設けられている。さらに、リングギヤ15と第1サンギヤ20とを選択的に接続または解放する第3クラッチC3が設けられている。さらにまた、キャリヤ18と第1サンギヤ20とを選択的に接続または解放する第4クラッチC4が設けられている。さらに、第1サンギヤ20を停止させる第1ブレーキB1が設けられている。さらに、キャリヤ23を停止させる第2ブレーキB2が設けられている。
【0018】
また、この実施例においては、第1クラッチC1ないし第4クラッチC4として、湿式の多板クラッチを用いることができる。すなわち、この多板クラッチは、インプットシャフト8の軸線に沿った方向に配置された複数の環状ディスクと、複数の環状プレートとを有している。このディスクおよびプレートの両端面に摩擦材が取り付けられている。そのディスクおよびプレートに軸線に沿った方向の押圧力を加え、摩擦力により動力伝達がおこなわれるクラッチである。また、多板クラッチは湿式であり、ケーシング11内に供給もしくは封入されている潤滑油により、多板クラッチが冷却および潤滑される。さらに、この実施例では、第1ブレーキB1および第2ブレーキB2として、湿式の多板ブレーキが用いられている。すなわち、この多板ブレーキは、インプットシャフト8の軸線に沿った方向に配置された複数の環状ディスクと、複数の環状プレートとを有しており、そのディスクおよびプレートに軸線に沿った方向の押圧力を加えて、摩擦力により制動力を発生するブレーキである。また、多板ブレーキは湿式であり、ケーシング11内に供給もしくは封入されている潤滑油により、多板ブレーキが冷却および潤滑される。
【0019】
さらに、第1クラッチC1ないし第4クラッチC4をそれぞれ係合または解放させる動力を発生し、かつ、第1ブレーキB1および第2ブレーキB2を係合および解放させる動力を発生するアクチュエータ28が設けられている。このアクチュエータ28としては、油圧を動作力に変換するアクチュエータ、または電動モータのトルクを動作力に変換するアクチュエータ、ソレノイドの磁気吸引力を動作力に変換するアクチュエータのいずれかを用いることができる。この実施例では、各係合要素をスリップさせる制御、つまり、滑り量を与えることが可能に構成されている。例えば、アクチュエータ28が、油圧式のアクチュエータであれば、係合要素に作用する油圧を低下すると滑り量が増加し、係合要素に作用する油圧を上昇すると滑り量が減少する。また、アクチュエータ28が、ソレノイドバルブを用いるアクチュエータであれば、ソレノイドに供給される電流値を低下させると、係合要素の滑り量が増加し、ソレノイドに供給される電流値を増加すると、係合要素の滑り量が減少する。また、アクチュエータ28が、電動モータを用いるアクチュエータであれば、電動モータのトルクを低下させると、係合要素の滑り量が増加し、電動モータのトルクを高めると、係合要素の滑り量が減少する。このように、クラッチおよびブレーキは、そのトルク容量を無段階に変更可能な構成である。
【0020】
さらに、車両1に搭載されたシステムを制御する制御系統について説明する。車両1に搭載されたシステムを制御するコントローラとして電子制御装置29が設けられており、その電子制御装置29には、エンジン2の始動要求、アクセルペダルの踏み込み状態を表すアクセル開度、ブレーキペダルの踏み込み状態、シフトポジション、車速、エンジン回転数、変速機10の入力回転数(インプットシャフト8の回転数)、変速機10の出力回転数(出力ギヤ24の回転数)などを検知するセンサおよびスイッチの検知信号が入力される。この電子制御装置29には、エンジン出力を制御するデータ、および変速機10の変速段を制御するデータ、ロックアップクラッチ9の係合および解放を制御するデータが記憶されている。上記のデータには、演算式およびマップが含まれる。そして、電子制御装置29に入力される信号、および電子制御装置29に記憶されているデータに基づいて、エンジン回転数およびエンジントルクを制御する信号、アクチュエータ28を制御する信号が出力される。
【0021】
例えば、エンジン2を始動する要求がある場合は、燃焼室に燃料が供給されるとともに、燃料および空気の混合気に点火されて燃焼し、その熱エネルギがクランクシャフト3の運動エネルギに変換される。そして、クランクシャフト3のトルクは流体伝動装置4を経由してインプットシャフト8に伝達される。このエンジン2の出力を制御するためのデータとしてエンジン制御マップが記憶されている。このエンジン制御マップについては後述する。また、ロックアップクラッチ9の係合および解放を制御するデータとして、ロックアップクラッチ制御マップが電子制御装置29に記憶されている。このロックアップクラッチ制御マップは、車速およびアクセル開度をパラメータとして、ロックアップクラッチ9を係合させる領域と、ロックアップクラッチ9を解放させる領域とを定めたものである。なお、この実施例では、ロックアップクラッチ制御マップ以外の条件によりロックアップクラッチ9を制御することができる。その制御については後述する。
【0022】
一方、車両1の室内に設けられたシフトポジション選択装置(図示せず)を操作すると、パーキング(P)ポジション、リバース(R)ポジション、ニュートラル(N)ポジション、ドライブ(D)ポジションを選択可能である。シフトポジションを切り替えると、図2に示されたクラッチおよびブレーキを、係合および解放する制御がおこなわれる。まず、パーキングポジションが選択された場合、またはニュートラルポジションが選択された場合は、ブレーキおよびクラッチが全て解放される。したがって、インプットシャフト8と出力ギヤ24との間における動力伝達が遮断される。
【0023】
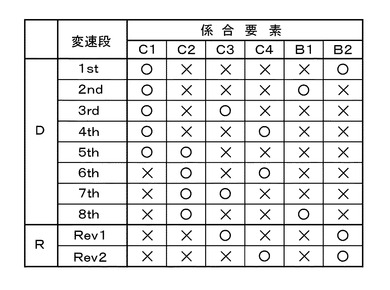
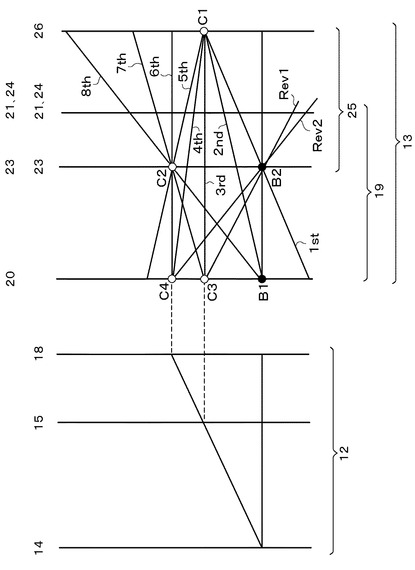
これに対して、ドライブポジションまたはリバースポジションが選択された場合は、インプットシャフト8と出力ギヤ24とが動力伝達可能に接続される。前記電子制御装置29には変速機10の変速段を制御するために変速マップが記憶されており、ドライブポジションでは、その変速マップに基づいて変速機10の変速段を選択し、かつ、その変速段を切り替える制御がおこなわれる。この変速マップは、車速およびアクセル開度をパラメータとして、選択する変速段を変速線で区分してある。具体的には、変速機の変速段として第1速(1st)、第2速(2nd)、第3速(3rd)、第4速(4th)、第5速(5th)、第6速(6th)の変速段、第7速(5th)、第8速(6th)の変速段が選択される領域を変速線により区分してある。そして、車速およびアクセル開度が、変速マップに示された変速線を横切ったときに、変速機10の変速段が変更される。つまり、変速機10でアップシフトまたはダウンシフトがおこなわれる。なお、アップシフト用の変速線と、ダウンシフト用の変速線との間には、予めヒステリシスが設けられている。図3には、ドライブポジションまたはリバースポジションが選択されたときにおける、前記クラッチおよびブレーキの作動状態が示されている。この図3において、「○」印は、クラッチまたはブレーキが係合されることを意味する。さらに、図3の「×」印は、クラッチまたはブレーキが解放されることを意味する。
【0024】
つぎに、ドライブポジションまたはリバースポジションが選択された場合における回転要素の状態を、図4の共線図に基づいて説明する。まず、第1速が選択された場合は、第1クラッチC1および第2ブレーキB2が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクがインプットシャフト8を経由して、第1の変速部12のキャリヤ18に入力されると、固定されているサンギヤ14が反力要素となり、リングギヤ15が正回転する。一方、第2の変速部13では、第1の変速部12のリングギヤ15から第2サンギヤ26にトルクが入力されるとともに、第2ブレーキB2の係合により固定されているキャリヤ23が反力要素となり、リングギヤ21からトルクが出力される。このようにして、リングギヤ21が正回転する。第1速が選択された場合は、インプットシャフト8の回転数よりも出力ギヤ24の回転数の方が低回転数となる、いわゆる減速状態にあり、変速機10の変速比は「1」よりも大きい。なお、ドライブポジションまたはリバースポジションの何れが選択された場合でも、エンジントルクが第1の変速部12のキャリヤ18に伝達されると、サンギヤ14で反力が受け持たれる。
【0025】
つぎに、第2速が選択された場合は、第1クラッチC1および第1ブレーキB1が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクが、第1速と同様に第1の変速部12のリングギヤ15に伝達されると、第2の変速部13では、第1サンギヤ20が反力要素となり、リングギヤ21からトルクが出力される。この第2速が選択された場合は、インプットシャフト8の回転数よりも出力ギヤ24の回転数の方が低回転数となる、いわゆる減速状態にあり、変速機の変速比は「1」よりも大きい。なお、図4では、インプットシャフト8の回転数を一定として示してあり、第1速よりも第2の速の方が出力ギヤ24の回転数が高い。つまり、第1速よりも第2速の方が変速比は小さい。
【0026】
つぎに、第3速が選択された場合は、第1クラッチC1および第3クラッチC3が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクが、第1速と同様に第1の変速部12のリングギヤ15に伝達されると、第2の変速部13では、4個の回転要素が全て一体回転する。この第3速が選択された場合は、インプットシャフト8の回転数よりも出力ギヤ24の回転数の方が低回転数となる、いわゆる減速状態にあり、変速機の変速比は「1」よりも大きい。なお、第2速よりも第3の速の方が出力ギヤ24の回転数が高い。つまり、第2速よりも第3速の方が変速比は小さい。
【0027】
つぎに、第4速が選択された場合は、第1クラッチC1および第4クラッチC4が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクが、第1速と同様に第1の変速部12のリングギヤ15に伝達されると、第2の変速部13では、第2サンギヤ26が反力要素となり、出力ギヤ24が正回転する。この第4速が選択された場合は、インプットシャフト8の回転数よりも出力ギヤ24の回転数の方が低回転数となる、いわゆる減速状態にあり、変速機の変速比は「1」よりも大きい。なお、第3速よりも第4速の方が出力ギヤ24の回転数が高い。つまり、第3速よりも第4速の方が変速比は小さい。
【0028】
つぎに、第5速が選択された場合は、第1クラッチC1および第2クラッチC2が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクが、第2の変速部13のキャリヤ23に伝達されると、第1速と同様に第2の変速部13の第2サンギヤ26が反力要素となり、出力ギヤ24が正回転する。この第5速が選択された場合は、インプットシャフト8の回転数よりも出力ギヤ24の回転数の方が低回転数となる、いわゆる減速状態にあり、変速機の変速比は「1」よりも大きい。なお、第4速よりも第5速の方が出力ギヤ24の回転数が高い。つまり、第4速よりも第5速の方が変速比は小さい。
【0029】
つぎに、第6速が選択された場合は、第2クラッチC2および第4クラッチC4が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクが、第2の変速部13のキャリヤ23に伝達されると、第2の変速部13の4個の回転要素が全て一体回転し、かつ、インプットシャフト8の回転数と出力ギヤ24の回転数とが一致する。つまり、変速機の変速比は「1」となる。
【0030】
つぎに、第7速が選択された場合は、第2クラッチC2および第3クラッチC3が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクが、第2の変速部13のキャリヤ23に伝達されると、第2の変速部13の第1サンギヤ20が反力を受け持ち、かつ、出力ギヤ24からトルクが出力される。この第7速では、インプットシャフト8の回転数よりも出力ギヤ24の回転数の方が高回転数となる。つまり、変速機10の変速比は「1」未満となる。
【0031】
つぎに、第8速が選択された場合は、第2クラッチC2および第1ブレーキB1が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクが、第2の変速部13のキャリヤ23に伝達されると、第2の変速部13の第1サンギヤ20が反力を受け持ち、かつ、出力ギヤ24からトルクが出力される。この第8速では、インプットシャフト8の回転数よりも出力ギヤ24の回転数の方が高回転数となる。また、出力ギヤ24の回転数は、第7速よりも第8速の方が高回転数である。つまり、変速機10の変速比は第7速よりも第8速の方が小さい。
【0032】
さらにリバースポジションが選択された場合は、第1リバース(Rev1)または第2リバース(Rev2)のいずれかを選択可能である。第1リバースが選択された場合は、第3クラッチC3および第2ブレーキB2が係合され、その他のクラッチおよびブレーキは解放される。このため、エンジントルクが第1の変速部12のリングギヤ15を経由して第2の変速部13の第1サンギヤ20に伝達されると、第2の変速部13のキャリヤ23が反力要素となり、出力ギヤ24を逆回転させるトルクが発生する。
【0033】
一方、第2リバースが選択された場合は、第4クラッチC4および第2ブレーキB2が係合され、その他のクラッチおよびブレーキは解放される。このため、エンジントルクが第1の変速部12のキャリヤ18を経由して第2の変速部13の第1サンギヤ20に伝達されると、第2の変速部13のキャリヤ23が反力要素となり、出力ギヤ24を逆回転させるトルクが発生する。このとき、出力ギヤ24の回転数は、第1リバースよりも第2リバースの方が高い。つまり、第1リバースよりも第2リバースの方が変速比が大きい。なお、第1リバースおよび第2リバースは、車速およびアクセル開度などの条件により使い分けられる。
【0034】
上記のように、車両1では予め電子制御装置29に記憶されている変速マップに基づいて、変速機10でアップシフトおよびダウンシフトをおこなうことができる。ここで、アップシフトとは、変速段を示す数字が大きくなる変速であり、アップシフトをおこなうと変速機10の変速比が相対的に小さくなる。また、ダウンフトとは、変速段を示す数字が小さくなる変速であり、ダウンシフトをおこなうと変速機10の変速比が相対的に大きくなる。ところで、変速マップに基づいて変速機10の変速段を制御すると、変速機10が有段変速機であるために、車速の変化に対してエンジン回転数がステップ的に変化する。具体的には、変速機10でダウンシフトをおこなうと、エンジン回転数がステップ的に上昇する。これとは逆に、変速機10でアップシフトをおこなうと、エンジン回転数がステップ的に低下する。このため、エンジン2の燃焼効率が最適ではない状態で運転される可能性がある。
【0035】
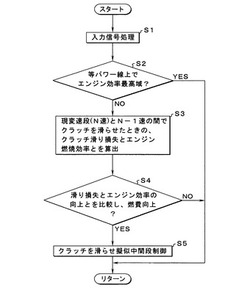
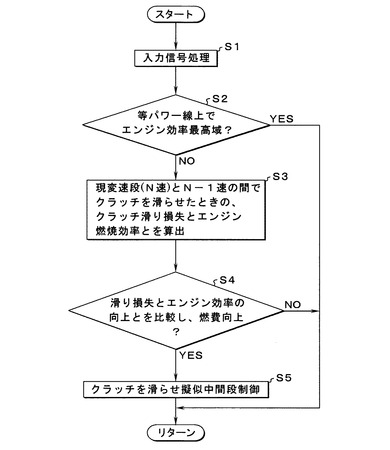
このような不都合に対処するための制御を、図1のフローチャートに基づいて説明する。図1の制御は、請求項1の発明に対応する。この図1に示されている制御は擬似中間段制御であり、変速マップ以外の条件により係合要素が制御される。擬似中間段制御の意味については、後述する。図1の制御がスタートされると、まず、電子制御装置29に入力される信号が処理され、かつ、その処理結果に基づいてエンジン出力および変速機10の変速段が制御される(ステップS1)。このステップS1では、例えば、シフトポジションとしてドライブポジションが選択されて車両1が走行しているとき、車速およびアクセル開度に基づいて、車両1の前後方向における要求駆動力が求められる。また、図1では、車両1の実際の駆動力を要求駆動力に近づけることを目的として、前記変速マップを用いて変速機10で現在選択する変速段が定められ、かつ、エンジン1に対する必要出力が求められる。この必要出力は、エンジン回転数およびトルクで表される。
【0036】
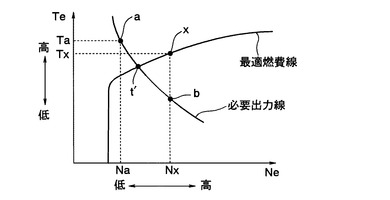
このステップS1につぐステップS2では、エンジン回転数およびエンジントルクで表されるエンジン2の実出力が必要出力を満たしているか否かが判断される。また、このステップS2では、エンジン2の燃焼効率が、相対的に高いものとして予め定められた基準値、例えば、最高域にあるか否かが判断される。このステップS2の判断には図5の特性線図を用いることができる。図5の特性線図では、横軸にエンジン回転数(Ne)が示され、縦軸にエンジントルク(Te)が示されている。また、図5の特性線図には、最適燃費線が示されている。そして、エンジン回転数およびエンジントルクで表される燃焼効率が最適燃費線と一致した場合に、そのエンジン2の燃焼効率が最適であることを意味する。さらに、図5には必要出力線が示されている。この必要出力線は、エンジン2に対する要求出力を表し、かつ、エンジントルクおよび回転数が異なっていても、等パワーとなる線で表したものである。なお、図5では、必要出力線が便宜上、1本示されているが、異なるアクセル開度毎に、段階的または無段階に複数の必要出力線を設定可能である。
【0037】
そして、ステップS2の判断時点におけるエンジン回転数およびエンジントルクを示す運転点が、いずれかの必要出力線と最適燃費線との交点に位置している場合は、ステップS2で肯定的に判断されて、リターンする。つまり、変速機10で現在選択されている変速段により、エンジンの燃焼効率が最高域にあるので、変速機10で擬似中間段を形成する必要はない。
【0038】
これに対して、ステップS2の判断時点において、エンジン2が運転点aにあるためにステップS2で否定判断された場合を説明する。この運転点aのエンジン回転数Naは、最適燃費線と必要出力線との交点t´におけるエンジン回転数よりも低い。また、運転点aではエンジントルクTaである。前述のように、変速機10は変速比を段階的に変更する構成であるため、要求駆動力に基づいて変速機10の変速段を変更したとき、車速の変化に対してエンジン回転数が段階的に変化する。このため、運転点が必要出力線から外れることがあり、また、運転点が最適燃費線から外れることもある。
【0039】
このように、ステップS2の判断時点でエンジン2が運転点aにある場合は、ステップS2で否定的に判断されて、変速機10で現在選択されている変速段(N速)と、N−1速との間で、係合要素を滑らせることを想定し、その係合要素の滑り損失と、係合要素を滑らせたときのエンジン2の燃焼効率とを算出する(ステップS3)。N−1速とは、現在の変速段(N)よりも1段下の変速段を意味する。例えば、現在の変速段が第6速であれば、N−1速は第5速であり、現在の変速段が第4速であれば、N−1速は第3速であり、現在の変速段が第3速であれば、N−1速は第2速である。エンジン2が運転点aにあるときはステップS3では、エンジン2の運転点aを最適燃費線に相対的に近づけるため、係合要素を滑らせてエンジン2の負荷を軽減し、エンジン回転数を上昇させる制御を想定する。また、エンジン2の運転状態が、エンジン回転数Naから上昇するように、係合要素を滑らせてエンジン回転数を変化させることを想定する。この係合要素の滑りにより生じる動力損失、つまり、滑り損失P1[kw]は、数式(1)により求めることができる。
【0040】
P1=C×(Nx−Na)×(Ta×Tx) ・・・(1)
【0041】
数式(1)において「C」は定数である。エンジン回転数Naからエンジン回転数Nxまでの上昇量が、ΔNで表される。ここで、Nxは、運転点xにおけるエンジン回転数であり、Taは運転点aにおけるエンジントルクであり、Txは運転点xにおけるエンジントルクである。なお、実用上は、予め実験またはシミュレーションをおこなって、係合要素の滑り量毎に、段階的にまたは無段階に発熱損失を求めてそのデータ(マップ)を電子制御装置29に記憶しておき、ステップS3ではそのデータを読み込めばよい。また、ステップS3では、係合要素の滑り量の無段階または段階的な変化に対応させて、エンジン回転数の変化(上昇)によるエンジン2の燃焼効率が段階的または無段階に求められる。係合要素を滑らせたときのエンジン2の燃費率向上によるエンジン出力向上代P2[kw]は、例えば、数式(2)により算出可能である。
【0042】
P2=Ta×Na−Tx×Nx(∫(Nx・Tx)/∫(Na・Ta))・・・(2)
【0043】
そして、N速で係合要素を滑らせてN−1速までダウンシフトする間に、
P1<P2
となる運転点xが存在すれば、運転点xとなるように滑り制御をおこなう。図5では運転点xが示されている。なお、実用上は、予め実験またはシミュレーションをおこなって、係合要素の滑り量とエンジン2の燃焼効率との関係をデータ(マップ)化して電子制御装置29に記憶しておき、ステップS3ではそのデータを読み込めばよい。上記のステップS3についで、係合要素の滑り損失分と、その係合要素の滑りにより生じるエンジン効率の向上分(燃料消費量の低減分)とを比較し、エンジン効率の向上分の方が、滑り損失分よりも多いか否かが判断される(ステップS4)。このステップS4の判断は、係合要素で設定可能な滑り量の範囲内について、段階的または無段階におこなわれる。なお、ステップS4において、係合要素の滑り損失分と、エンジン効率の向上分とを比較する場合、両者を同じ物理量であるエネルギに換算して比較すればよい。このステップS4で否定的に判断された場合はリターンする。これに対して、ステップS4で肯定的に判断された場合は、そのステップS4で肯定判断された係合要素の滑り量となるように、係合要素の実際の滑り量を制御し(ステップS5)、リターンする。
【0044】
例えば、変速機10の変速段として第8速が選択されているときに、ステップS5に進んだ場合は、第2クラッチC2または第1ブレーキB1のいずれか一方を滑らせる制御をおこなうことができる。また、変速機10の変速段として第7速が選択されているときに、ステップS5に進んだ場合は、第2クラッチC2または第3クラッチC3のいずれか一方を滑らせる制御をおこなうことができる。さらに、変速機10の変速段として第6速が選択されているときに、ステップS5に進んだ場合は、第2クラッチC2または第4クラッチC4のいずれか一方を滑らせる制御をおこなうことができる。
【0045】
さらに、変速機10の変速段として第5速が選択されているときに、ステップS5に進んだ場合は、第1クラッチC1または第2クラッチC2のいずれか一方を滑らせる制御をおこなうことができる。さらに、変速機10の変速段として第4速が選択されているときに、ステップS5に進んだ場合は、第1クラッチC1または第4クラッチC4のいずれか一方を滑らせる制御をおこなうことができる。さらに、変速機10の変速段として第3速が選択されているときに、ステップS5に進んだ場合は、第1クラッチC1または第3クラッチC3のいずれか一方を滑らせる制御をおこなうことができる。さらに、変速機10の変速段として第2速が選択されているときに、ステップS5に進んだ場合は、第1クラッチC1または第2ブレーキB2のいずれか一方を滑らせる制御をおこなうことができる。
【0046】
さらに、アクチュエータ28として油圧式のアクチュエータを用いており、第2速または第8速が選択されているときにステップS5に進み、いずれか一方の係合要素を滑らせる場合に、クラッチではなくブレーキを滑らせると、そのブレーキの滑り量を高精度に制御できる利点がある。これは、ブレーキに作用する圧油を供給する油路および油圧室がケーシング11に形成されており、回転要素の回転による遠心力で、油圧室の油圧の低下が阻害されることを回避できるからである。
【0047】
さらに、ステップS5で、変速段を設定するために係合されている2つの係合要素のうち、滑らせる係合要素を予め決定しておくこともできる。例えば、第1速ないし第5速では第1クラッチC1を滑らせ、第5速ないし第8速では第2クラッチC2を滑らせることができる。このように、滑らせる係合要素を2つに限定すると、その係合要素の耐久性を他の係合要素に比べて高めておくなど、設計および保守が容易だからである。また、ステップS5では、一方の係合要素の滑り量が予め定めた所定値より多くなることが予測される場合は、変速段を設定するために係合されている2つの係合要素を、共に滑らせることも可能である。この所定値は、係合要素の滑りが繰り返し発生すると、その係合要素の耐久性が低下すると認められる基準値であり、その所定値は実験またはシミュレーションによって求められた値である。この所定値は電子制御装置29に記憶させておき、ステップS5で係合要素を滑らせるときに用いればよい。
【0048】
このように、係合要素のいずれか一方、または両方を滑らせると、選択されている変速段と、その変速段よりも小さい変速段との間の変速比を有する変速段、つまり、中間変速段が形成される。このように、係合要素を滑らせて形成する中間変速段が、前述した擬似中間段の意味である。以上のように、図1の制御を実行すると、エンジン出力(回転数およびトルク)を、燃焼効率が最高となる状態に近づけることができる。したがって、エンジンの燃費を向上することができる。
【0049】
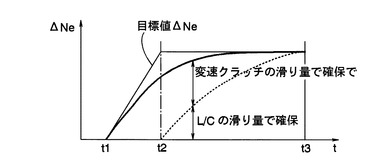
ところで、ステップS5では、変速機10で所定の変速段を設定するために係合されている係合要素を滑らせる制御に加えて、ロックアップクラッチ9を滑らせる制御をおこなうことも可能である。このように、ロックアップクラッチ9を滑らせると、エンジン負荷が低下してエンジン回転数が上昇するため、燃費を向上できる。このように、係合要素を滑らせる制御と、ロックアップクラッチ9を滑らせる制御とを並行しておこなう場合の一例を、図6のタイムチャートにより説明する。図6では縦軸にはエンジン回転数の変化率NeΔが示され、横軸に時間が示されている。前記ステップS4で肯定判断されると、時刻t1以降、エンジン回転数の変化率の目標値が上昇し、時刻t2以降は、エンジン回転数の変化率の目標値が略一定となっている。
【0050】
図6に示すように、時刻t1以降、まず、係合要素を滑らせることにより、エンジン回転数の変化率を目標変化率に近づける制御をおこない、時刻t2からは、係合要素の滑り量の制御と、ロックアップクラッチ(L/C)9の滑り量の制御とを同時におこなうことにより、エンジン回転数の変化率を目標変化率に近づける制御をおこなう。そして、時刻t3以降は、ロックアップクラッチ9の滑り量の制御のみにより、エンジン回転数の実際の変化率を目標変化率に近づける。ここで、係合要素の滑り量の制御を、ロックアップクラッチ9の滑り量の制御よりも先におこなう理由は、係合要素の滑り量の制御の方が、ロックアップクラッチ9の滑り量の制御よりも応答性が高いからである。これは、油路の長さが短く、かつ、管路抵抗が低いからである。また、係合要素の滑り量制御から、ロックアップクラッチ9の滑り量制御に切り替えると、流体伝動装置4の冷却性能が高く熱的に有利という利点がある。
【0051】
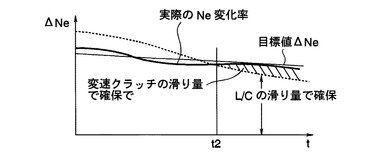
さらに、ステップS5において、変速機10で所定の変速段を設定するために係合されている係合要素を滑らせる制御に加えて、ロックアップクラッチ9を滑らせる制御をおこなう他の例を、図7のタイムチャートにより説明する。時刻t1以前においては、ロックアップクラッチ(L/C)9の滑り量を制御することにより、エンジン回転数の実際の変化率を目標変化率以上としている。時刻t1以降は、ロックアップクラッチ9の滑り量を制御することにより得られるエンジン回転数の実際の変化率が、目標変化率よりも少なくなる。そこで、時刻t1以降は、ロックアップクラッチ9の滑り制御に加えて、係合要素(変速クラッチ)を滑らせることで、エンジン回転数の実際の変化率と、目標変化率との差を相対的に少なくしている。この図7では、係合要素(変速クラッチ)の滑り量が斜線で示す領域である。
【0052】
つぎに、図5でエンジン回転数およびエンジントルクが運転点bにあることにより、ステップS2で否定的に判断された場合について説明する。この場合は、エンジン回転数を低下させることにより、エンジン効率を高めるために、ステップS3において、現在の変速段よりも1段上の変速段を設定することを想定し、かつ、そのときに係合されるべき係合要素を、便宜的に滑らせることを想定し、そのときの滑り損失分と、エンジン回転数を低下させることにより生じるエンジン効率の上昇分とを求める。例えば、第1クラッチC1および第4クラッチC4が係合されて第4速が達成されているときに、第4クラッチC4は完全に解放し、かつ、第5速で係合される第2クラッチC2を滑らせる制御をおこなう。なお、第1クラッチC1が係合された状態に維持されることは勿論である。
【0053】
そして、ステップS4では、係合要素の滑り損失分よりも、エンジン回転数を低下させることにより生じるエンジン効率の上昇分の方が大きいか否かが判断される。このステップS4で否定的に判断された場合はリターンし、このステップS4で肯定的に判断された場合は、ステップS5に進み、現在の変速段よりも1段上の変速段を設定するときに係合される係合要素のうち、少なくとも一方を滑らせる制御をおこなう。なお、係合要素を滑らせてエンジン回転数を低下させ、そのエンジンの効率を向上させる制御は、現在の変速段が第1速ないし第7速のうち、何れの変速段にある場合でも実行可能である。このように、現在の変速段よりも上の変速段で係合されるべき係合要素を滑らせて形成される中間変速段も、擬似中間段に含まれる。
【0054】
ここで、図1に示された機能的手段と、この発明の発明の構成との対応関係を説明すると、ステップS2が、この発明の効率判断手段に相当し、ステップS3が、この発明の推定手段に相当し、ステップS4が、この発明の比較手段に相当し、ステップS5が、この発明の滑り制御手段に相当する。また、最適燃費線が、この発明の基準値に相当する。図2に示された構成と、この発明の構成との対応関係を説明すると、エンジン2が、この発明のエンジン2に相当し、変速機10が、この発明の変速機10に相当し、インプットシャフト8が、この発明の入力部材に相当し、出力ギヤ24が、この発明の出力部材に相当し、第1クラッチC1ないし第4クラッチC4、および第1ブレーキB1および第2ブレーキB2が、この発明の係合要素に相当する。
【0055】
ところで、図2に示された車両1において、エンジン2から車輪に至る動力伝達経路に、モータ・ジェネレータ30を設けることが可能である。このモータ・ジェネレータ30は、電気エネルギを運動エネルギに変換する力行と、運動エネルギを電気エネルギに変換する回生とをおこなうことが可能である。モータ・ジェネレータ30としては3相交流型のモータ・ジェネレータを用いることが可能であり、このモータ・ジェネレータ30には電源(図示せず)が接続されている。電源としては、充電および放電をおこなうことの可能な二次電池、例えば、バッテリまたはキャパシタを用いることができる。また、電源としては、二次電池に加えて、水素と酸素との反応により起電力を生じる燃料電池を用いることもできる。モータ・ジェネレータ30はロータ31およびステータ32を有しており、ステータ32がケーシング11に固定されている。また、ロータ31はインプットシャフト8と動力伝達可能に接続されている。このモータ・ジェネレータ30の力行および回生は、電子制御装置29により制御される構成である。
【0056】
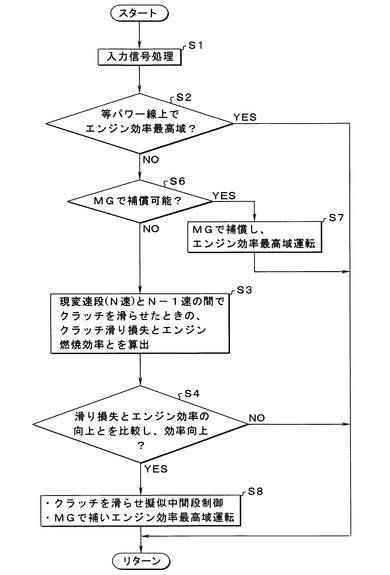
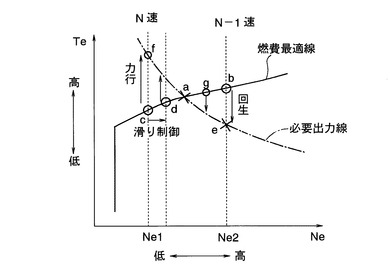
つぎに、モータ・ジェネレータ30を有する車両1で実行可能な他の制御を、図8のフローチャートに基づいて説明する。この図8は請求項2に対応する。図8のフローチャートにおいて、図1のフローチャートと同じ処理については、図1と同じステップ番号を付してある。この図8のフローチャートのステップS2の判断を、図9の特性線図を用いて説明する。図9の技術的意味は、基本的には図5と同じである。図9に示す運転点aは、必要出力線上に位置しており、かつ、最適燃費線上に位置している。この場合、ステップS2で肯定的に判断される。これに対して、図9に示すように、変速機10でN速が選択されたときの運転点cは、必要出力線から外れた位置にあり、かつ、最適燃費線上にあるため、ステップS2で否定的に判断される。運転点cのエンジントルクは、同じ回転数Ne1における必要出力線のエンジントルクよりも低い。また、変速機10でN−1速が選択されたときの運転点eは、必要出力線上にあり、かつ、最適燃費線から外れた位置にあるため、ステップS2で否定的に判断される。運転点eのエンジントルクは、同じエンジン回転数Ne2における最適燃費線上の運転点bにおけるエンジントルクよりも低い。
【0057】
上記のステップS2で否定的に判断された場合は、エンジン2の運転点を、最適燃費線上に位置させ、かつ、見かけ上、必要出力線上に位置させるため以下の制御をおこなう。まず、エンジン2の運転点を見かけ上で移動させるためにモータ・ジェネレータ30を制御することを想定するとともに、移動前の運転点と、移動後の運転点と必要出力との差を、モータ・ジェネレータ(MG)30の制御により補償可能であるか否かが判断される(ステップS6)。前記した運転点cであるときは、エンジン回転数を変更することなく、見かけ上の運転点を運転点fに変更することを想定する。この想定時に、運転点eと運転点fとの差に相当するトルクの不足分を、モータ・ジェネレータ30を力行させて発生可能であるか否かを判断することが、ステップS6でおこなわれる。
【0058】
一方、運転点eであるときは、エンジン回転数を変更することなく、見かけ上の運転点を運転点bに変更することを想定する。この想定時に、運転点bと運転点eとの差に相当するトルクの余剰分を、モータ・ジェネレータ30の回生トルクとして発生可能であるか否かを判断することが、ステップS6でおこなわれる。なお、モータ・ジェネレータ30を力行する場合は、モータ・ジェネレータ30の定格から一義的に求められる最大トルク、電源の電力から求められるモータ・ジェネレータ30の出力可能トルクを用いて、ステップS6の判断をおこなう。これに対して、モータ・ジェネレータ30で回生するときは、モータ・ジェネレータ30の定格から一義的に求められる回生トルク、電源に充電可能な電力から求められるモータ・ジェネレータ30の回生トルクを用いて、ステップS6の判断をおこなう。
【0059】
このステップS6で肯定的に判断された場合は、エンジン2の運転点を変更し、かつ、運転点の変更によるトルク不足またはトルクの余剰分を、モータ・ジェネレータ30で補償することにより、エンジン2の運転点を最適燃費線上に位置させ、かつ、見かけ上、必要出力線上に位置させる制御をおこない(ステップS7)、リターンする。このステップS7では、例えば、図8に示されたエンジン2の運転点を、運転点cからfに移動し、かつ、モータ・ジェネレータ30を力行する制御、または、運転点eから運転点bに移動し、かつ、モータ・ジェネレータ30を回生する制御をおこなう。
【0060】
これに対して、ステップS6で否定的に判断された場合は、エンジン2の運転点の変更前と変更後との差に相当するトルクの不足分を、モータ・ジェネレータ30の力行により補償できるように、エンジン出力を変更する制御、またはエンジン2の運転点の変更前と変更後との差に相当するトルクの余剰分を、モータ・ジェネレータ30の回生により補償することが可能となるように、エンジン出力を変更する制御をおこなう。まず、エンジン2の運転点を運転点cから運転点fに変更することを想定し、そのときのトルクの不足分をモータ・ジェネレータ30の力行により補償できないことを理由として、ステップS6で否定的に判断された場合に、ステップS3でおこなわれる制御を説明する。
【0061】
前記図9において、運転点cよりもエンジン回転数が相対的に増加すると、最適燃費線と必要出力線との間隔が狭くなる。つまり、エンジン回転数が相対的に高くなるほど、モータ・ジェネレータ30の力行で補償する分のトルクが相対的に少なくなる傾向にある。そこで、最適燃費線と必要出力線との差に相当する不足分のトルクが、モータ・ジェネレータ30の力行により補償可能なトルクとなるように、エンジン回転数を上昇させることを想定する。例えば、運転点cから運転点dに変更すれば、最適燃費線と必要出力線との差に相当する不足分のトルクを、モータ・ジェネレータ30の力行により補償可能であれば、運転点cに相当する回転数から、運転点dに相当する回転数まで、エンジン回転数が上昇するように、変速機10で現在の変速段で係合されている係合要素を滑らせる制御を想定する。そして、係合要素を滑らせたときの滑り損失と、エンジン2の燃焼効率の上昇分とを求める。
【0062】
このステップS3についで、前述と同じステップS4の判断がおこなわれ、ステップS4で否定的に判断された場合は、リターンする。このステップS4で肯定的に判断された場合は、変速機10の係合要素を滑らせてエンジン回転数を運転点dに相当する回転数まで上昇させるとともに、エンジントルクを運転点dに相当するトルクまで上昇させる制御をおこない(ステップS8)、リターンする。また、このステップS8では、運転点dと、その運転点dと同じ回転数における必要出力線との差に相当する不足分のトルクを、モータ・ジェネレータ30の力行により補う制御をおこなう。
【0063】
つぎに、ステップS6で、エンジン2の運転点を運転点bから運転点eに変更することを想定し、そのときのトルクの余剰分をモータ・ジェネレータ30の回生により補償できないことを理由として、ステップS6で否定的に判断された場合に、ステップS3でおこなわれる制御を説明する。
【0064】
前記図9において、運転点bよりもエンジン回転数が相対的に低下すると、最適燃費線と必要出力線との間隔が狭くなる。つまり、エンジン回転数が相対的に低下するほど、モータ・ジェネレータ30の回生で補償する分のトルクが相対的に少なくなる傾向にある。そこで、最適燃費線と必要出力線との差に相当する余剰分のトルクが、モータ・ジェネレータ30の回生により補償可能なトルクとなるように、エンジン回転数を低下させることを想定する。例えば、運転点bから運転点gに変更すれば、最適燃費線と必要出力線との差に相当する余剰分のトルクを、モータ・ジェネレータ30の回生により補償可能であれば、運転点bに相当する回転数から、運転点gに相当する回転数まで、エンジン回転数が低下するように、変速機10で現在の変速段よりも上の変速段で係合される係合要素を滑らせる制御を想定する。そして、係合要素を滑らせたときの滑り損失と、エンジン2の燃焼効率の上昇分とを求める。
【0065】
このステップS3についで、前述と同じステップS4の判断がおこなわれ、ステップS4で否定的に判断された場合は、リターンする。このステップS4で肯定的に判断された場合は、変速機10の係合要素を滑らせてエンジン回転数を運転点gに相当する回転数まで低下させ、かつ、エンジントルクを運転点gに相当する値まで低下させる制御をおこない(ステップS8)、リターンする。また、このステップS8では、運転点gと、その運転点gと同じ回転数における必要出力線との差に相当する余剰分のトルクを、モータ・ジェネレータ30の回生により補う制御をおこなう。
【0066】
このように、図8の制御を実行すると、図1の制御と同じ処理をおこなう部分については、図1の制御と同様の効果を得られる。また、図8の制御では、エンジン2の運転点を最適燃費線上に位置させるとともに、そのエンジン2の運転点を、見かけ上、必要出力線上に位置させることができ、車両1における要求駆動力に対して実際の駆動力が過不足なく生じ、ドライバビリティが向上する。ここで、図8に示された機能的手段と、この発明の構成との対応関係を説明すると、ステップS1が、この発明の必要出力算出手段に相当し、ステップS8が、この発明の滑り制御手段に相当する。また、図2に示されたモータ・ジェネレータ30が、この発明のモータ・ジェネレータに相当する。
【0067】
なお、上記の2つの制御例において、ステップS2で運転点が最適燃費線上に位置しているか否かを判断するのではなく、運転点が、最適燃費線よりもトルクの高低方向で一定の範囲内にあるか否かを判断してもよい。つまり、この発明における基準値は、トルクの高低方向に一定の幅を備えていてもよい。また、選択可能な変速段が第1速から第7速までの変速機、選択可能な変速段が第1速から第6速までの変速機、選択可能な変速段が第1速から第5速までの変速機、選択可能な変速段が第1速から第4速までの変速機、選択可能な変速段が第1速から第3速までの変速機であっても、図1または図8の制御を実行できる。また、この発明における基準値は、図5および図9に示す特性線に代えて、数値として電子制御装置29に記憶しておいてもよい。あるいは、基準値を求める演算式を用いてもよい。また、変速機の変速段を設定するにあたり、図2に示された変速機は複数、具体的には2個の係合要素を係合する構成であるが、3個以上の係合要素を係合して変速段を形成する変速機、または単数の係合要素を係合して変速段を形成する変速機にも、図1および図8の制御を適用可能である。さらに、図8の制御を実行する対象となる車両は、モータ・ジェネレータが出力ギヤ24と一体回転する構成でもよい。あるいは、出力ギヤ24から車輪に至る経路にモータ・ジェネレータが設けられていてもよい。また、モータ・ジェネレータは交流型ではなく直流型でもよい。
【図面の簡単な説明】
【0068】
【図1】この発明の制御を示すフローチャートである。
【図2】この発明の制御を実行可能な車両の構成を示すスケルトン図である。
【図3】図2に示された変速機で変速段を形成する係合要素の動作を示す図表である。
【図4】図2に示された変速機を構成する回転要素の回転数を示す共線図である。
【図5】図2に示されたエンジンの回転数とトルクとの関係を示す特性線図である。
【図6】図2に示された変速機で実行可能な制御を示すタイムチャートである。
【図7】図2に示された変速機で実行可能な他の制御を示すタイムチャートである。
【図8】この発明の他の制御を示すフローチャートである。
【図9】図8に示す他の制御を説明する特性線図である。
【符号の説明】
【0069】
1…車両、 2…エンジン、 8…インプットシャフト、 10…変速機、 24…出力ギヤ、 30…モータ・ジェネレータ、 C1…第1クラッチ、 C2…第2クラッチ、 C3…第3クラッチ、 C4…第4クラッチ、 B1…第1ブレーキ、 B2…第2ブレーキ。
【技術分野】
【0001】
この発明は、エンジンに接続された動力伝達経路に、変速比を段階的に制御することのできる有段変速機が設けられている、車両の制御装置に関するものである。
【背景技術】
【0002】
一般に、エンジンから車輪に至る動力伝達経路に、変速比を段階的に制御することのできる有段変速機が設けられた車両が知られており、その一例が特許文献1に記載されている。この特許文献1に記載された車両では、エンジンの出力側に変速機が設けられており、その変速機は、3組の遊星歯車装置と、4つのクラッチおよび2つのブレーキを有している。そして、ドライブポジションが選択された場合は、変速機で第1速ないし第8速を選択的に切り替え可能であり、リバースポジションが選択された場合は、変速機で2種類の後進段を選択可能である。このように構成することにより、変速機の変速段の多段化が実現され、変速比の幅を大きく取ることができ、滑らかな変速特性を得られ、エンジンの燃費が向上するとされている。なお、多段式の変速機を有する車両の制御装置は、特許文献2ないし特許文献4にも記載されている。
【0003】
【特許文献1】特開2005−273768号公報
【特許文献2】特開2007−292227号公報
【特許文献3】特開2004−322935号公報
【特許文献4】特開2004−100941号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されている多段変速機では、車速の変化に対してエンジン回転数がステップ的に変化するため、エンジンの燃焼効率が良好な運転状態を必ずしも使用することができず、その点で改善の余地が残されていた。
【0005】
この発明は、上記の技術的課題に着目してなされたものであり、エンジンの燃費をより向上させることのできる、車両の制御装置を提供することを目的とするものである。
【課題を解決するための手段】
【0006】
上記の目的を達成するために請求項1の発明は、燃料を燃焼させて動力を発生するエンジンと、このエンジンから出力される動力の伝達経路に配置され、かつ、入力回転数と出力回転数との間の変速比を段階的に変更可能な変速機と、この変速機でいずれかの変速比を達成するときに係合され、かつ、前記変速機の入力部材と出力部材とを動力伝達可能に接続する係合要素とを備えた、車両の制御装置において、前記エンジンの燃焼効率が、相対的に高いことを表す値として予め定められた基準値を満たすか否かを判断する効率判断手段と、前記エンジンの燃焼効率が基準値を満たさないと判断された場合は、前記変速機でいずれかの変速比を設定するときに係合させる係合要素を滑らせてエンジン回転数を変化させることを想定して、その係合要素の滑りにより生じる動力損失を推定し、かつ、エンジン回転数の変化により生じるエンジンの燃焼効率の向上分を推定する推定手段と、前記推定手段により推定された動力損失分と、前記推定手段により推定されたエンジンの効率の向上分とを比較して、何れが大きいかを判断する比較手段と、この比較手段により、前記動力損失分よりも前記エンジンの燃焼効率の向上分の方が大きいと判断された場合に、前記係合要素を滑らせてエンジン回転数を変化させる滑り制御手段とを備えていることを特徴とするものである。
【0007】
請求項2の発明は、請求項1の構成に加えて、前記エンジンから車輪に至る動力の伝達経路に、電気エネルギを運動エネルギに変換する力行と、運動エネルギを電気エネルギに変換する回生とをおこなうことのできるモータ・ジェネレータが設けられており、前記車両における前後方向の要求駆動力に基づいて、前記エンジンの必要出力を求める必要出力算出手段を有し、前記効率判断手段は、前記エンジン回転数およびエンジントルクを用いて前記エンジンの燃焼効率が前記基準値を満たすか否かを判断し、かつ、前記エンジン回転数およびエンジントルクで表される実出力が前記必要出力を満たすか否かを判断する手段を含み、前記エンジン回転数およびエンジントルクが前記基準値を満たしておらず、かつ、前記実出力が前記必要出力を満たさないと判断された場合に、前記滑り制御手段は、係合要素を滑らせ、かつ、前記必要出力と前記実出力との差を相対的に少なくするように、前記モータ・ジェネレータを力行または回生する手段を含むことを特徴とするものである。
【発明の効果】
【0008】
請求項1の発明によれば、エンジンの燃焼効率が基準値を満たさないと判断された場合は、係合要素を滑らせてエンジン回転数を変化させることを想定して、その係合要素の滑りにより生じる動力損失を推定し、かつ、エンジン回転数の変化により生じるエンジンの燃焼効率の向上分を推定する。そして、推定された動力損失分と、推定されたエンジンの燃焼効率の向上分とを比較して、何れが大きいかを判断する。さらに、動力損失分よりもエンジンの燃焼効率の向上分の方が大きいと判断された場合は、係合要素を滑らせてエンジン回転数を変化させる。したがって、エンジンの燃焼効率を向上できる。
【0009】
請求項2の発明によれば、請求項1の発明と同様の効果を得られる他に、車両における前後方向の要求駆動力に基づいて、エンジンの必要出力を求める。また、エンジンの実出力が必要出力を満たすか否かを判断する。さらに、エンジンの実出力が必要出力を満たさず、かつ、エンジンの燃焼効率が基準値を満たしていないと判断された場合は、係合要素を滑らせ、かつ、必要出力とエンジンの実出力との差を相対的に小さくするように、モータ・ジェネレータを力行または回生する。したがって、エンジンの燃焼効率を向上でき、かつ、車両における要求駆動力と、実駆動力との差を相対的に少なくすることができ、ドライバビリティが向上する。
【発明を実施するための最良の形態】
【0010】
この発明における変速機は、エンジンから車輪に至る動力伝達経路に配置される伝動装置であり、入力回転数と出力回転数との間の変速比を段階的に変更可能な有段変速機である。有段変速機で選択可能な変速比の数(変速段)は、2段以上あれば何れの変速段でもよい。この有段変速機としては、歯車変速機を用いることができ、例えば、遊星歯車式変速機、または選択歯車式変速機を用いることができる。この発明における係合要素は係合および解放が可能であり、係合要素が係合または解放されて、変速機でいずれかの変速比を達成することができる。また、係合要素が係合されると、変速機の入力部材と出力部材とが動力伝達可能に接続される。この発明の係合要素にはクラッチおよびブレーキが含まれる。クラッチには、摩擦力または電磁力により動力伝達をおこなうクラッチが含まれる。ブレーキには、摩擦力または電磁力により制動力を生じるブレーキが含まれる。この発明における係合要素は、滑り制御をおこなうことが可能に構成されている。つまり、トルク容量を無段階に変更可能である。この発明の入力部材および出力部材は、動力伝達をおこなう回転要素であり、入力部材および出力部材には、回転軸、ギヤ、キャリヤ、コネクティングドラム、スプロケット、チェーン、プーリ、ベルトなどが含まれる。この発明における車輪は、前輪または後輪のいずれでもよい。
【0011】
この発明では、係合要素を滑らせて、係合要素の係合により動力伝達可能に接続される回転要素同士に回転数差を生じさせることができる。例えば、係合要素が係合されて変速機で所定の変速段が選択されているときに、その変速段を設定するために係合されている係合要素を滑らせることにより、エンジン回転数を上昇させてエンジンの燃費を向上することができる。また、係合要素が係合されて変速機で所定の変速段が選択されている場合に、その変速段よりも変速比の小さい変速段を設定するときに、解放される係合要素は解放し、かつ、係合される係合要素を滑らせつつ係合することにより、エンジン回転数を低下させて、エンジンの燃費を向上することもできる。また、この発明において、エンジンから車輪に至る経路にモータ・ジェネレータが設けられている。さらに、エンジンから車輪に至る動力の伝達方向で、係合要素の上流または下流の何れにモータ・ジェネレータが配置されていてもよい。
【0012】
つぎに、この発明の具体例を図2に基づいて説明する。この発明で対象とする車両1には、走行用の動力源としてエンジン2が搭載されている。このエンジン2は、燃料を燃焼させて動力を発生する動力装置であり、エンジン2としては内燃機関、例えば、ガソリンエンジンまたはディーゼルエンジンまたはLPGエンジンなどを用いることができる。このエンジン2においては、吸気管に電子スロットルバルブが設けられており、この吸気管を経由して燃焼室に空気が吸入される。この燃焼室で燃料が燃焼して発生した熱エネルギが、クランクシャフト3の回転運動に変換される構成である。車両1の室内には運転者が操作するアクセルペダルが設けられており、そのアクセルペダルの踏み込み量を表すアクセル開度、またはアクセル開度に関わりなく、電子スロットルバルブの開度を調整することにより、エンジン2の出力トルクを制御可能である。また、エンジン2には点火装置および燃料噴射装置が設けられており、点火時期または燃料噴射量を制御することにより、エンジントルクを制御可能である。
【0013】
このエンジン2のクランクシャフト3と動力伝達可能な流体伝動装置4が設けられている。この流体伝動装置4は、流体の運動エネルギにより動力伝達をおこなうことのできる装置である。この流体伝動装置4は、ポンプインペラ5およびタービンランナ6を有しており、ポンプインペラ5が、フロントカバー7を介在させてクランクシャフト3と動力伝達可能に、具体的には一体的に回転するように連結されている。また、タービンランナ6にはインプットシャフト8が動力伝達可能に接続されている。さらに、インプットシャフト8とフロントカバー7との間で、摩擦力により動力伝達をおこなうことのできるロックアップクラッチ9が設けられている。このロックアップクラッチ9は、油圧により動作が制御されて、フロントとカバー7に係合、またはフロントカバー7から解放される構成である。このロックアップクラッチ9をスリップ制御すると、そのトルク容量を無段階で制御可能である。また、ロックアップクラッチ9が解放されている場合、トルク増幅することが可能である。
【0014】
さらに、インプットシャフト8はクランクシャフト3と同軸上に配置されており、クランクシャフト3から車輪(図示せず)に至る動力伝達経路には変速機10が設けられている。この変速機10は、中空のケーシング11の内部に設けられている。この変速機10は、入力回転数と出力回転数との間の比、すなわち変速比を段階的に(不連続に)変更可能な有段式変速機である。この具体例では、有段変速機として、複数組の変速部を有する自動変速機が用いられている。具体的には、変速機10は、第1の変速部12および第2の変速部13を有している。第1の変速部12は副変速部を構成するものであり、この第1の変速部12はダブルピニオン型の遊星歯車機構により構成されている。この第1の変速部12は、外歯であるサンギヤ14と、このサンギヤ14と同軸上に配置された内歯であるリングギヤ15と、サンギヤ14に噛合されたピニオンギヤ16と、このピニオンギヤ16およびリングギヤ15に噛合されたピニオンギヤ17と、2種類のピニオンギヤ16,17をそれぞれ自転可能に、かつ、一体的に公転可能に支持するキャリヤ18とを有している。このように、第1の変速部12は、相互に差動回転可能に接続された3個の回転要素、つまり、サンギヤ14およびリングギヤ15およびキャリヤ18を有している。また、前記サンギヤ14は回転しない状態で前記ケーシング11に固定されている。
【0015】
さらに、インプットシャフト8の外周側に第2の変速部13が配置されている。この第2の変速部13は主変速部を構成するものであり、この第2の変速部13は複数組の遊星歯車機構により構成されている。第2の変速部13を構成する第1の遊星歯車機構19は、同軸上に配置された第1サンギヤ20およびリングギヤ21と、第1サンギヤ20およびリングギヤ21に噛合されたロングピニオンギヤ22と、このロングピニオンギヤ22を、自転かつ公転可能に支持したキャリヤ23とを有している。上記のように、第1の遊星歯車機構19は、相互に差動回転可能に接続された3個の回転要素、つまり、第1サンギヤ20およびリングギヤ21および23キャリヤを有している。なお、リングギヤ21と一体回転する出力ギヤ24が設けられている。この出力ギヤ24には車輪が動力伝達可能に接続されている。
【0016】
さらに、第2の変速部13の一部を構成する第2の遊星歯車機構25は、第1サンギヤ20と同軸に配置され、かつ、第1サンギヤ20よりも歯数が少ない第2サンギヤ26と、第2サンギヤ26およびロングピニオンギヤ22に噛合されたショートピニオンギヤ27と、前記ロングピニオンギヤ22およびショートピニオンギヤ27をそれぞれ自転可能、かつ、一体的に公転可能に支持するキャリヤ23とを有している。つまり、第2の変速部13のキャリヤ23は、第1の遊星歯車機構19および第2の遊星歯車機構25で共用化されている。このように、第2の変速部13は、第1の遊星歯車機構19および第2の遊星歯車機構25により構成されたラビニョ型の遊星歯車機構である。
【0017】
つぎに、第1の変速部12および第2の変速部13に含まれる回転要素同士を相互に接続または解放する係合要素としてのクラッチ、および回転要素を選択的に停止(固定)する係合要素としてのブレーキについて説明する。まず、前記リングギヤ15と第2サンギヤ26とを選択的に接続または解放する第1クラッチC1が設けられている。また、前記キャリヤ23とインプットシャフト8とを選択的に接続または解放する第2クラッチC2が設けられている。さらに、リングギヤ15と第1サンギヤ20とを選択的に接続または解放する第3クラッチC3が設けられている。さらにまた、キャリヤ18と第1サンギヤ20とを選択的に接続または解放する第4クラッチC4が設けられている。さらに、第1サンギヤ20を停止させる第1ブレーキB1が設けられている。さらに、キャリヤ23を停止させる第2ブレーキB2が設けられている。
【0018】
また、この実施例においては、第1クラッチC1ないし第4クラッチC4として、湿式の多板クラッチを用いることができる。すなわち、この多板クラッチは、インプットシャフト8の軸線に沿った方向に配置された複数の環状ディスクと、複数の環状プレートとを有している。このディスクおよびプレートの両端面に摩擦材が取り付けられている。そのディスクおよびプレートに軸線に沿った方向の押圧力を加え、摩擦力により動力伝達がおこなわれるクラッチである。また、多板クラッチは湿式であり、ケーシング11内に供給もしくは封入されている潤滑油により、多板クラッチが冷却および潤滑される。さらに、この実施例では、第1ブレーキB1および第2ブレーキB2として、湿式の多板ブレーキが用いられている。すなわち、この多板ブレーキは、インプットシャフト8の軸線に沿った方向に配置された複数の環状ディスクと、複数の環状プレートとを有しており、そのディスクおよびプレートに軸線に沿った方向の押圧力を加えて、摩擦力により制動力を発生するブレーキである。また、多板ブレーキは湿式であり、ケーシング11内に供給もしくは封入されている潤滑油により、多板ブレーキが冷却および潤滑される。
【0019】
さらに、第1クラッチC1ないし第4クラッチC4をそれぞれ係合または解放させる動力を発生し、かつ、第1ブレーキB1および第2ブレーキB2を係合および解放させる動力を発生するアクチュエータ28が設けられている。このアクチュエータ28としては、油圧を動作力に変換するアクチュエータ、または電動モータのトルクを動作力に変換するアクチュエータ、ソレノイドの磁気吸引力を動作力に変換するアクチュエータのいずれかを用いることができる。この実施例では、各係合要素をスリップさせる制御、つまり、滑り量を与えることが可能に構成されている。例えば、アクチュエータ28が、油圧式のアクチュエータであれば、係合要素に作用する油圧を低下すると滑り量が増加し、係合要素に作用する油圧を上昇すると滑り量が減少する。また、アクチュエータ28が、ソレノイドバルブを用いるアクチュエータであれば、ソレノイドに供給される電流値を低下させると、係合要素の滑り量が増加し、ソレノイドに供給される電流値を増加すると、係合要素の滑り量が減少する。また、アクチュエータ28が、電動モータを用いるアクチュエータであれば、電動モータのトルクを低下させると、係合要素の滑り量が増加し、電動モータのトルクを高めると、係合要素の滑り量が減少する。このように、クラッチおよびブレーキは、そのトルク容量を無段階に変更可能な構成である。
【0020】
さらに、車両1に搭載されたシステムを制御する制御系統について説明する。車両1に搭載されたシステムを制御するコントローラとして電子制御装置29が設けられており、その電子制御装置29には、エンジン2の始動要求、アクセルペダルの踏み込み状態を表すアクセル開度、ブレーキペダルの踏み込み状態、シフトポジション、車速、エンジン回転数、変速機10の入力回転数(インプットシャフト8の回転数)、変速機10の出力回転数(出力ギヤ24の回転数)などを検知するセンサおよびスイッチの検知信号が入力される。この電子制御装置29には、エンジン出力を制御するデータ、および変速機10の変速段を制御するデータ、ロックアップクラッチ9の係合および解放を制御するデータが記憶されている。上記のデータには、演算式およびマップが含まれる。そして、電子制御装置29に入力される信号、および電子制御装置29に記憶されているデータに基づいて、エンジン回転数およびエンジントルクを制御する信号、アクチュエータ28を制御する信号が出力される。
【0021】
例えば、エンジン2を始動する要求がある場合は、燃焼室に燃料が供給されるとともに、燃料および空気の混合気に点火されて燃焼し、その熱エネルギがクランクシャフト3の運動エネルギに変換される。そして、クランクシャフト3のトルクは流体伝動装置4を経由してインプットシャフト8に伝達される。このエンジン2の出力を制御するためのデータとしてエンジン制御マップが記憶されている。このエンジン制御マップについては後述する。また、ロックアップクラッチ9の係合および解放を制御するデータとして、ロックアップクラッチ制御マップが電子制御装置29に記憶されている。このロックアップクラッチ制御マップは、車速およびアクセル開度をパラメータとして、ロックアップクラッチ9を係合させる領域と、ロックアップクラッチ9を解放させる領域とを定めたものである。なお、この実施例では、ロックアップクラッチ制御マップ以外の条件によりロックアップクラッチ9を制御することができる。その制御については後述する。
【0022】
一方、車両1の室内に設けられたシフトポジション選択装置(図示せず)を操作すると、パーキング(P)ポジション、リバース(R)ポジション、ニュートラル(N)ポジション、ドライブ(D)ポジションを選択可能である。シフトポジションを切り替えると、図2に示されたクラッチおよびブレーキを、係合および解放する制御がおこなわれる。まず、パーキングポジションが選択された場合、またはニュートラルポジションが選択された場合は、ブレーキおよびクラッチが全て解放される。したがって、インプットシャフト8と出力ギヤ24との間における動力伝達が遮断される。
【0023】
これに対して、ドライブポジションまたはリバースポジションが選択された場合は、インプットシャフト8と出力ギヤ24とが動力伝達可能に接続される。前記電子制御装置29には変速機10の変速段を制御するために変速マップが記憶されており、ドライブポジションでは、その変速マップに基づいて変速機10の変速段を選択し、かつ、その変速段を切り替える制御がおこなわれる。この変速マップは、車速およびアクセル開度をパラメータとして、選択する変速段を変速線で区分してある。具体的には、変速機の変速段として第1速(1st)、第2速(2nd)、第3速(3rd)、第4速(4th)、第5速(5th)、第6速(6th)の変速段、第7速(5th)、第8速(6th)の変速段が選択される領域を変速線により区分してある。そして、車速およびアクセル開度が、変速マップに示された変速線を横切ったときに、変速機10の変速段が変更される。つまり、変速機10でアップシフトまたはダウンシフトがおこなわれる。なお、アップシフト用の変速線と、ダウンシフト用の変速線との間には、予めヒステリシスが設けられている。図3には、ドライブポジションまたはリバースポジションが選択されたときにおける、前記クラッチおよびブレーキの作動状態が示されている。この図3において、「○」印は、クラッチまたはブレーキが係合されることを意味する。さらに、図3の「×」印は、クラッチまたはブレーキが解放されることを意味する。
【0024】
つぎに、ドライブポジションまたはリバースポジションが選択された場合における回転要素の状態を、図4の共線図に基づいて説明する。まず、第1速が選択された場合は、第1クラッチC1および第2ブレーキB2が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクがインプットシャフト8を経由して、第1の変速部12のキャリヤ18に入力されると、固定されているサンギヤ14が反力要素となり、リングギヤ15が正回転する。一方、第2の変速部13では、第1の変速部12のリングギヤ15から第2サンギヤ26にトルクが入力されるとともに、第2ブレーキB2の係合により固定されているキャリヤ23が反力要素となり、リングギヤ21からトルクが出力される。このようにして、リングギヤ21が正回転する。第1速が選択された場合は、インプットシャフト8の回転数よりも出力ギヤ24の回転数の方が低回転数となる、いわゆる減速状態にあり、変速機10の変速比は「1」よりも大きい。なお、ドライブポジションまたはリバースポジションの何れが選択された場合でも、エンジントルクが第1の変速部12のキャリヤ18に伝達されると、サンギヤ14で反力が受け持たれる。
【0025】
つぎに、第2速が選択された場合は、第1クラッチC1および第1ブレーキB1が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクが、第1速と同様に第1の変速部12のリングギヤ15に伝達されると、第2の変速部13では、第1サンギヤ20が反力要素となり、リングギヤ21からトルクが出力される。この第2速が選択された場合は、インプットシャフト8の回転数よりも出力ギヤ24の回転数の方が低回転数となる、いわゆる減速状態にあり、変速機の変速比は「1」よりも大きい。なお、図4では、インプットシャフト8の回転数を一定として示してあり、第1速よりも第2の速の方が出力ギヤ24の回転数が高い。つまり、第1速よりも第2速の方が変速比は小さい。
【0026】
つぎに、第3速が選択された場合は、第1クラッチC1および第3クラッチC3が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクが、第1速と同様に第1の変速部12のリングギヤ15に伝達されると、第2の変速部13では、4個の回転要素が全て一体回転する。この第3速が選択された場合は、インプットシャフト8の回転数よりも出力ギヤ24の回転数の方が低回転数となる、いわゆる減速状態にあり、変速機の変速比は「1」よりも大きい。なお、第2速よりも第3の速の方が出力ギヤ24の回転数が高い。つまり、第2速よりも第3速の方が変速比は小さい。
【0027】
つぎに、第4速が選択された場合は、第1クラッチC1および第4クラッチC4が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクが、第1速と同様に第1の変速部12のリングギヤ15に伝達されると、第2の変速部13では、第2サンギヤ26が反力要素となり、出力ギヤ24が正回転する。この第4速が選択された場合は、インプットシャフト8の回転数よりも出力ギヤ24の回転数の方が低回転数となる、いわゆる減速状態にあり、変速機の変速比は「1」よりも大きい。なお、第3速よりも第4速の方が出力ギヤ24の回転数が高い。つまり、第3速よりも第4速の方が変速比は小さい。
【0028】
つぎに、第5速が選択された場合は、第1クラッチC1および第2クラッチC2が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクが、第2の変速部13のキャリヤ23に伝達されると、第1速と同様に第2の変速部13の第2サンギヤ26が反力要素となり、出力ギヤ24が正回転する。この第5速が選択された場合は、インプットシャフト8の回転数よりも出力ギヤ24の回転数の方が低回転数となる、いわゆる減速状態にあり、変速機の変速比は「1」よりも大きい。なお、第4速よりも第5速の方が出力ギヤ24の回転数が高い。つまり、第4速よりも第5速の方が変速比は小さい。
【0029】
つぎに、第6速が選択された場合は、第2クラッチC2および第4クラッチC4が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクが、第2の変速部13のキャリヤ23に伝達されると、第2の変速部13の4個の回転要素が全て一体回転し、かつ、インプットシャフト8の回転数と出力ギヤ24の回転数とが一致する。つまり、変速機の変速比は「1」となる。
【0030】
つぎに、第7速が選択された場合は、第2クラッチC2および第3クラッチC3が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクが、第2の変速部13のキャリヤ23に伝達されると、第2の変速部13の第1サンギヤ20が反力を受け持ち、かつ、出力ギヤ24からトルクが出力される。この第7速では、インプットシャフト8の回転数よりも出力ギヤ24の回転数の方が高回転数となる。つまり、変速機10の変速比は「1」未満となる。
【0031】
つぎに、第8速が選択された場合は、第2クラッチC2および第1ブレーキB1が係合され、その他のクラッチおよびブレーキは解放される。ここで、エンジントルクが、第2の変速部13のキャリヤ23に伝達されると、第2の変速部13の第1サンギヤ20が反力を受け持ち、かつ、出力ギヤ24からトルクが出力される。この第8速では、インプットシャフト8の回転数よりも出力ギヤ24の回転数の方が高回転数となる。また、出力ギヤ24の回転数は、第7速よりも第8速の方が高回転数である。つまり、変速機10の変速比は第7速よりも第8速の方が小さい。
【0032】
さらにリバースポジションが選択された場合は、第1リバース(Rev1)または第2リバース(Rev2)のいずれかを選択可能である。第1リバースが選択された場合は、第3クラッチC3および第2ブレーキB2が係合され、その他のクラッチおよびブレーキは解放される。このため、エンジントルクが第1の変速部12のリングギヤ15を経由して第2の変速部13の第1サンギヤ20に伝達されると、第2の変速部13のキャリヤ23が反力要素となり、出力ギヤ24を逆回転させるトルクが発生する。
【0033】
一方、第2リバースが選択された場合は、第4クラッチC4および第2ブレーキB2が係合され、その他のクラッチおよびブレーキは解放される。このため、エンジントルクが第1の変速部12のキャリヤ18を経由して第2の変速部13の第1サンギヤ20に伝達されると、第2の変速部13のキャリヤ23が反力要素となり、出力ギヤ24を逆回転させるトルクが発生する。このとき、出力ギヤ24の回転数は、第1リバースよりも第2リバースの方が高い。つまり、第1リバースよりも第2リバースの方が変速比が大きい。なお、第1リバースおよび第2リバースは、車速およびアクセル開度などの条件により使い分けられる。
【0034】
上記のように、車両1では予め電子制御装置29に記憶されている変速マップに基づいて、変速機10でアップシフトおよびダウンシフトをおこなうことができる。ここで、アップシフトとは、変速段を示す数字が大きくなる変速であり、アップシフトをおこなうと変速機10の変速比が相対的に小さくなる。また、ダウンフトとは、変速段を示す数字が小さくなる変速であり、ダウンシフトをおこなうと変速機10の変速比が相対的に大きくなる。ところで、変速マップに基づいて変速機10の変速段を制御すると、変速機10が有段変速機であるために、車速の変化に対してエンジン回転数がステップ的に変化する。具体的には、変速機10でダウンシフトをおこなうと、エンジン回転数がステップ的に上昇する。これとは逆に、変速機10でアップシフトをおこなうと、エンジン回転数がステップ的に低下する。このため、エンジン2の燃焼効率が最適ではない状態で運転される可能性がある。
【0035】
このような不都合に対処するための制御を、図1のフローチャートに基づいて説明する。図1の制御は、請求項1の発明に対応する。この図1に示されている制御は擬似中間段制御であり、変速マップ以外の条件により係合要素が制御される。擬似中間段制御の意味については、後述する。図1の制御がスタートされると、まず、電子制御装置29に入力される信号が処理され、かつ、その処理結果に基づいてエンジン出力および変速機10の変速段が制御される(ステップS1)。このステップS1では、例えば、シフトポジションとしてドライブポジションが選択されて車両1が走行しているとき、車速およびアクセル開度に基づいて、車両1の前後方向における要求駆動力が求められる。また、図1では、車両1の実際の駆動力を要求駆動力に近づけることを目的として、前記変速マップを用いて変速機10で現在選択する変速段が定められ、かつ、エンジン1に対する必要出力が求められる。この必要出力は、エンジン回転数およびトルクで表される。
【0036】
このステップS1につぐステップS2では、エンジン回転数およびエンジントルクで表されるエンジン2の実出力が必要出力を満たしているか否かが判断される。また、このステップS2では、エンジン2の燃焼効率が、相対的に高いものとして予め定められた基準値、例えば、最高域にあるか否かが判断される。このステップS2の判断には図5の特性線図を用いることができる。図5の特性線図では、横軸にエンジン回転数(Ne)が示され、縦軸にエンジントルク(Te)が示されている。また、図5の特性線図には、最適燃費線が示されている。そして、エンジン回転数およびエンジントルクで表される燃焼効率が最適燃費線と一致した場合に、そのエンジン2の燃焼効率が最適であることを意味する。さらに、図5には必要出力線が示されている。この必要出力線は、エンジン2に対する要求出力を表し、かつ、エンジントルクおよび回転数が異なっていても、等パワーとなる線で表したものである。なお、図5では、必要出力線が便宜上、1本示されているが、異なるアクセル開度毎に、段階的または無段階に複数の必要出力線を設定可能である。
【0037】
そして、ステップS2の判断時点におけるエンジン回転数およびエンジントルクを示す運転点が、いずれかの必要出力線と最適燃費線との交点に位置している場合は、ステップS2で肯定的に判断されて、リターンする。つまり、変速機10で現在選択されている変速段により、エンジンの燃焼効率が最高域にあるので、変速機10で擬似中間段を形成する必要はない。
【0038】
これに対して、ステップS2の判断時点において、エンジン2が運転点aにあるためにステップS2で否定判断された場合を説明する。この運転点aのエンジン回転数Naは、最適燃費線と必要出力線との交点t´におけるエンジン回転数よりも低い。また、運転点aではエンジントルクTaである。前述のように、変速機10は変速比を段階的に変更する構成であるため、要求駆動力に基づいて変速機10の変速段を変更したとき、車速の変化に対してエンジン回転数が段階的に変化する。このため、運転点が必要出力線から外れることがあり、また、運転点が最適燃費線から外れることもある。
【0039】
このように、ステップS2の判断時点でエンジン2が運転点aにある場合は、ステップS2で否定的に判断されて、変速機10で現在選択されている変速段(N速)と、N−1速との間で、係合要素を滑らせることを想定し、その係合要素の滑り損失と、係合要素を滑らせたときのエンジン2の燃焼効率とを算出する(ステップS3)。N−1速とは、現在の変速段(N)よりも1段下の変速段を意味する。例えば、現在の変速段が第6速であれば、N−1速は第5速であり、現在の変速段が第4速であれば、N−1速は第3速であり、現在の変速段が第3速であれば、N−1速は第2速である。エンジン2が運転点aにあるときはステップS3では、エンジン2の運転点aを最適燃費線に相対的に近づけるため、係合要素を滑らせてエンジン2の負荷を軽減し、エンジン回転数を上昇させる制御を想定する。また、エンジン2の運転状態が、エンジン回転数Naから上昇するように、係合要素を滑らせてエンジン回転数を変化させることを想定する。この係合要素の滑りにより生じる動力損失、つまり、滑り損失P1[kw]は、数式(1)により求めることができる。
【0040】
P1=C×(Nx−Na)×(Ta×Tx) ・・・(1)
【0041】
数式(1)において「C」は定数である。エンジン回転数Naからエンジン回転数Nxまでの上昇量が、ΔNで表される。ここで、Nxは、運転点xにおけるエンジン回転数であり、Taは運転点aにおけるエンジントルクであり、Txは運転点xにおけるエンジントルクである。なお、実用上は、予め実験またはシミュレーションをおこなって、係合要素の滑り量毎に、段階的にまたは無段階に発熱損失を求めてそのデータ(マップ)を電子制御装置29に記憶しておき、ステップS3ではそのデータを読み込めばよい。また、ステップS3では、係合要素の滑り量の無段階または段階的な変化に対応させて、エンジン回転数の変化(上昇)によるエンジン2の燃焼効率が段階的または無段階に求められる。係合要素を滑らせたときのエンジン2の燃費率向上によるエンジン出力向上代P2[kw]は、例えば、数式(2)により算出可能である。
【0042】
P2=Ta×Na−Tx×Nx(∫(Nx・Tx)/∫(Na・Ta))・・・(2)
【0043】
そして、N速で係合要素を滑らせてN−1速までダウンシフトする間に、
P1<P2
となる運転点xが存在すれば、運転点xとなるように滑り制御をおこなう。図5では運転点xが示されている。なお、実用上は、予め実験またはシミュレーションをおこなって、係合要素の滑り量とエンジン2の燃焼効率との関係をデータ(マップ)化して電子制御装置29に記憶しておき、ステップS3ではそのデータを読み込めばよい。上記のステップS3についで、係合要素の滑り損失分と、その係合要素の滑りにより生じるエンジン効率の向上分(燃料消費量の低減分)とを比較し、エンジン効率の向上分の方が、滑り損失分よりも多いか否かが判断される(ステップS4)。このステップS4の判断は、係合要素で設定可能な滑り量の範囲内について、段階的または無段階におこなわれる。なお、ステップS4において、係合要素の滑り損失分と、エンジン効率の向上分とを比較する場合、両者を同じ物理量であるエネルギに換算して比較すればよい。このステップS4で否定的に判断された場合はリターンする。これに対して、ステップS4で肯定的に判断された場合は、そのステップS4で肯定判断された係合要素の滑り量となるように、係合要素の実際の滑り量を制御し(ステップS5)、リターンする。
【0044】
例えば、変速機10の変速段として第8速が選択されているときに、ステップS5に進んだ場合は、第2クラッチC2または第1ブレーキB1のいずれか一方を滑らせる制御をおこなうことができる。また、変速機10の変速段として第7速が選択されているときに、ステップS5に進んだ場合は、第2クラッチC2または第3クラッチC3のいずれか一方を滑らせる制御をおこなうことができる。さらに、変速機10の変速段として第6速が選択されているときに、ステップS5に進んだ場合は、第2クラッチC2または第4クラッチC4のいずれか一方を滑らせる制御をおこなうことができる。
【0045】
さらに、変速機10の変速段として第5速が選択されているときに、ステップS5に進んだ場合は、第1クラッチC1または第2クラッチC2のいずれか一方を滑らせる制御をおこなうことができる。さらに、変速機10の変速段として第4速が選択されているときに、ステップS5に進んだ場合は、第1クラッチC1または第4クラッチC4のいずれか一方を滑らせる制御をおこなうことができる。さらに、変速機10の変速段として第3速が選択されているときに、ステップS5に進んだ場合は、第1クラッチC1または第3クラッチC3のいずれか一方を滑らせる制御をおこなうことができる。さらに、変速機10の変速段として第2速が選択されているときに、ステップS5に進んだ場合は、第1クラッチC1または第2ブレーキB2のいずれか一方を滑らせる制御をおこなうことができる。
【0046】
さらに、アクチュエータ28として油圧式のアクチュエータを用いており、第2速または第8速が選択されているときにステップS5に進み、いずれか一方の係合要素を滑らせる場合に、クラッチではなくブレーキを滑らせると、そのブレーキの滑り量を高精度に制御できる利点がある。これは、ブレーキに作用する圧油を供給する油路および油圧室がケーシング11に形成されており、回転要素の回転による遠心力で、油圧室の油圧の低下が阻害されることを回避できるからである。
【0047】
さらに、ステップS5で、変速段を設定するために係合されている2つの係合要素のうち、滑らせる係合要素を予め決定しておくこともできる。例えば、第1速ないし第5速では第1クラッチC1を滑らせ、第5速ないし第8速では第2クラッチC2を滑らせることができる。このように、滑らせる係合要素を2つに限定すると、その係合要素の耐久性を他の係合要素に比べて高めておくなど、設計および保守が容易だからである。また、ステップS5では、一方の係合要素の滑り量が予め定めた所定値より多くなることが予測される場合は、変速段を設定するために係合されている2つの係合要素を、共に滑らせることも可能である。この所定値は、係合要素の滑りが繰り返し発生すると、その係合要素の耐久性が低下すると認められる基準値であり、その所定値は実験またはシミュレーションによって求められた値である。この所定値は電子制御装置29に記憶させておき、ステップS5で係合要素を滑らせるときに用いればよい。
【0048】
このように、係合要素のいずれか一方、または両方を滑らせると、選択されている変速段と、その変速段よりも小さい変速段との間の変速比を有する変速段、つまり、中間変速段が形成される。このように、係合要素を滑らせて形成する中間変速段が、前述した擬似中間段の意味である。以上のように、図1の制御を実行すると、エンジン出力(回転数およびトルク)を、燃焼効率が最高となる状態に近づけることができる。したがって、エンジンの燃費を向上することができる。
【0049】
ところで、ステップS5では、変速機10で所定の変速段を設定するために係合されている係合要素を滑らせる制御に加えて、ロックアップクラッチ9を滑らせる制御をおこなうことも可能である。このように、ロックアップクラッチ9を滑らせると、エンジン負荷が低下してエンジン回転数が上昇するため、燃費を向上できる。このように、係合要素を滑らせる制御と、ロックアップクラッチ9を滑らせる制御とを並行しておこなう場合の一例を、図6のタイムチャートにより説明する。図6では縦軸にはエンジン回転数の変化率NeΔが示され、横軸に時間が示されている。前記ステップS4で肯定判断されると、時刻t1以降、エンジン回転数の変化率の目標値が上昇し、時刻t2以降は、エンジン回転数の変化率の目標値が略一定となっている。
【0050】
図6に示すように、時刻t1以降、まず、係合要素を滑らせることにより、エンジン回転数の変化率を目標変化率に近づける制御をおこない、時刻t2からは、係合要素の滑り量の制御と、ロックアップクラッチ(L/C)9の滑り量の制御とを同時におこなうことにより、エンジン回転数の変化率を目標変化率に近づける制御をおこなう。そして、時刻t3以降は、ロックアップクラッチ9の滑り量の制御のみにより、エンジン回転数の実際の変化率を目標変化率に近づける。ここで、係合要素の滑り量の制御を、ロックアップクラッチ9の滑り量の制御よりも先におこなう理由は、係合要素の滑り量の制御の方が、ロックアップクラッチ9の滑り量の制御よりも応答性が高いからである。これは、油路の長さが短く、かつ、管路抵抗が低いからである。また、係合要素の滑り量制御から、ロックアップクラッチ9の滑り量制御に切り替えると、流体伝動装置4の冷却性能が高く熱的に有利という利点がある。
【0051】
さらに、ステップS5において、変速機10で所定の変速段を設定するために係合されている係合要素を滑らせる制御に加えて、ロックアップクラッチ9を滑らせる制御をおこなう他の例を、図7のタイムチャートにより説明する。時刻t1以前においては、ロックアップクラッチ(L/C)9の滑り量を制御することにより、エンジン回転数の実際の変化率を目標変化率以上としている。時刻t1以降は、ロックアップクラッチ9の滑り量を制御することにより得られるエンジン回転数の実際の変化率が、目標変化率よりも少なくなる。そこで、時刻t1以降は、ロックアップクラッチ9の滑り制御に加えて、係合要素(変速クラッチ)を滑らせることで、エンジン回転数の実際の変化率と、目標変化率との差を相対的に少なくしている。この図7では、係合要素(変速クラッチ)の滑り量が斜線で示す領域である。
【0052】
つぎに、図5でエンジン回転数およびエンジントルクが運転点bにあることにより、ステップS2で否定的に判断された場合について説明する。この場合は、エンジン回転数を低下させることにより、エンジン効率を高めるために、ステップS3において、現在の変速段よりも1段上の変速段を設定することを想定し、かつ、そのときに係合されるべき係合要素を、便宜的に滑らせることを想定し、そのときの滑り損失分と、エンジン回転数を低下させることにより生じるエンジン効率の上昇分とを求める。例えば、第1クラッチC1および第4クラッチC4が係合されて第4速が達成されているときに、第4クラッチC4は完全に解放し、かつ、第5速で係合される第2クラッチC2を滑らせる制御をおこなう。なお、第1クラッチC1が係合された状態に維持されることは勿論である。
【0053】
そして、ステップS4では、係合要素の滑り損失分よりも、エンジン回転数を低下させることにより生じるエンジン効率の上昇分の方が大きいか否かが判断される。このステップS4で否定的に判断された場合はリターンし、このステップS4で肯定的に判断された場合は、ステップS5に進み、現在の変速段よりも1段上の変速段を設定するときに係合される係合要素のうち、少なくとも一方を滑らせる制御をおこなう。なお、係合要素を滑らせてエンジン回転数を低下させ、そのエンジンの効率を向上させる制御は、現在の変速段が第1速ないし第7速のうち、何れの変速段にある場合でも実行可能である。このように、現在の変速段よりも上の変速段で係合されるべき係合要素を滑らせて形成される中間変速段も、擬似中間段に含まれる。
【0054】
ここで、図1に示された機能的手段と、この発明の発明の構成との対応関係を説明すると、ステップS2が、この発明の効率判断手段に相当し、ステップS3が、この発明の推定手段に相当し、ステップS4が、この発明の比較手段に相当し、ステップS5が、この発明の滑り制御手段に相当する。また、最適燃費線が、この発明の基準値に相当する。図2に示された構成と、この発明の構成との対応関係を説明すると、エンジン2が、この発明のエンジン2に相当し、変速機10が、この発明の変速機10に相当し、インプットシャフト8が、この発明の入力部材に相当し、出力ギヤ24が、この発明の出力部材に相当し、第1クラッチC1ないし第4クラッチC4、および第1ブレーキB1および第2ブレーキB2が、この発明の係合要素に相当する。
【0055】
ところで、図2に示された車両1において、エンジン2から車輪に至る動力伝達経路に、モータ・ジェネレータ30を設けることが可能である。このモータ・ジェネレータ30は、電気エネルギを運動エネルギに変換する力行と、運動エネルギを電気エネルギに変換する回生とをおこなうことが可能である。モータ・ジェネレータ30としては3相交流型のモータ・ジェネレータを用いることが可能であり、このモータ・ジェネレータ30には電源(図示せず)が接続されている。電源としては、充電および放電をおこなうことの可能な二次電池、例えば、バッテリまたはキャパシタを用いることができる。また、電源としては、二次電池に加えて、水素と酸素との反応により起電力を生じる燃料電池を用いることもできる。モータ・ジェネレータ30はロータ31およびステータ32を有しており、ステータ32がケーシング11に固定されている。また、ロータ31はインプットシャフト8と動力伝達可能に接続されている。このモータ・ジェネレータ30の力行および回生は、電子制御装置29により制御される構成である。
【0056】
つぎに、モータ・ジェネレータ30を有する車両1で実行可能な他の制御を、図8のフローチャートに基づいて説明する。この図8は請求項2に対応する。図8のフローチャートにおいて、図1のフローチャートと同じ処理については、図1と同じステップ番号を付してある。この図8のフローチャートのステップS2の判断を、図9の特性線図を用いて説明する。図9の技術的意味は、基本的には図5と同じである。図9に示す運転点aは、必要出力線上に位置しており、かつ、最適燃費線上に位置している。この場合、ステップS2で肯定的に判断される。これに対して、図9に示すように、変速機10でN速が選択されたときの運転点cは、必要出力線から外れた位置にあり、かつ、最適燃費線上にあるため、ステップS2で否定的に判断される。運転点cのエンジントルクは、同じ回転数Ne1における必要出力線のエンジントルクよりも低い。また、変速機10でN−1速が選択されたときの運転点eは、必要出力線上にあり、かつ、最適燃費線から外れた位置にあるため、ステップS2で否定的に判断される。運転点eのエンジントルクは、同じエンジン回転数Ne2における最適燃費線上の運転点bにおけるエンジントルクよりも低い。
【0057】
上記のステップS2で否定的に判断された場合は、エンジン2の運転点を、最適燃費線上に位置させ、かつ、見かけ上、必要出力線上に位置させるため以下の制御をおこなう。まず、エンジン2の運転点を見かけ上で移動させるためにモータ・ジェネレータ30を制御することを想定するとともに、移動前の運転点と、移動後の運転点と必要出力との差を、モータ・ジェネレータ(MG)30の制御により補償可能であるか否かが判断される(ステップS6)。前記した運転点cであるときは、エンジン回転数を変更することなく、見かけ上の運転点を運転点fに変更することを想定する。この想定時に、運転点eと運転点fとの差に相当するトルクの不足分を、モータ・ジェネレータ30を力行させて発生可能であるか否かを判断することが、ステップS6でおこなわれる。
【0058】
一方、運転点eであるときは、エンジン回転数を変更することなく、見かけ上の運転点を運転点bに変更することを想定する。この想定時に、運転点bと運転点eとの差に相当するトルクの余剰分を、モータ・ジェネレータ30の回生トルクとして発生可能であるか否かを判断することが、ステップS6でおこなわれる。なお、モータ・ジェネレータ30を力行する場合は、モータ・ジェネレータ30の定格から一義的に求められる最大トルク、電源の電力から求められるモータ・ジェネレータ30の出力可能トルクを用いて、ステップS6の判断をおこなう。これに対して、モータ・ジェネレータ30で回生するときは、モータ・ジェネレータ30の定格から一義的に求められる回生トルク、電源に充電可能な電力から求められるモータ・ジェネレータ30の回生トルクを用いて、ステップS6の判断をおこなう。
【0059】
このステップS6で肯定的に判断された場合は、エンジン2の運転点を変更し、かつ、運転点の変更によるトルク不足またはトルクの余剰分を、モータ・ジェネレータ30で補償することにより、エンジン2の運転点を最適燃費線上に位置させ、かつ、見かけ上、必要出力線上に位置させる制御をおこない(ステップS7)、リターンする。このステップS7では、例えば、図8に示されたエンジン2の運転点を、運転点cからfに移動し、かつ、モータ・ジェネレータ30を力行する制御、または、運転点eから運転点bに移動し、かつ、モータ・ジェネレータ30を回生する制御をおこなう。
【0060】
これに対して、ステップS6で否定的に判断された場合は、エンジン2の運転点の変更前と変更後との差に相当するトルクの不足分を、モータ・ジェネレータ30の力行により補償できるように、エンジン出力を変更する制御、またはエンジン2の運転点の変更前と変更後との差に相当するトルクの余剰分を、モータ・ジェネレータ30の回生により補償することが可能となるように、エンジン出力を変更する制御をおこなう。まず、エンジン2の運転点を運転点cから運転点fに変更することを想定し、そのときのトルクの不足分をモータ・ジェネレータ30の力行により補償できないことを理由として、ステップS6で否定的に判断された場合に、ステップS3でおこなわれる制御を説明する。
【0061】
前記図9において、運転点cよりもエンジン回転数が相対的に増加すると、最適燃費線と必要出力線との間隔が狭くなる。つまり、エンジン回転数が相対的に高くなるほど、モータ・ジェネレータ30の力行で補償する分のトルクが相対的に少なくなる傾向にある。そこで、最適燃費線と必要出力線との差に相当する不足分のトルクが、モータ・ジェネレータ30の力行により補償可能なトルクとなるように、エンジン回転数を上昇させることを想定する。例えば、運転点cから運転点dに変更すれば、最適燃費線と必要出力線との差に相当する不足分のトルクを、モータ・ジェネレータ30の力行により補償可能であれば、運転点cに相当する回転数から、運転点dに相当する回転数まで、エンジン回転数が上昇するように、変速機10で現在の変速段で係合されている係合要素を滑らせる制御を想定する。そして、係合要素を滑らせたときの滑り損失と、エンジン2の燃焼効率の上昇分とを求める。
【0062】
このステップS3についで、前述と同じステップS4の判断がおこなわれ、ステップS4で否定的に判断された場合は、リターンする。このステップS4で肯定的に判断された場合は、変速機10の係合要素を滑らせてエンジン回転数を運転点dに相当する回転数まで上昇させるとともに、エンジントルクを運転点dに相当するトルクまで上昇させる制御をおこない(ステップS8)、リターンする。また、このステップS8では、運転点dと、その運転点dと同じ回転数における必要出力線との差に相当する不足分のトルクを、モータ・ジェネレータ30の力行により補う制御をおこなう。
【0063】
つぎに、ステップS6で、エンジン2の運転点を運転点bから運転点eに変更することを想定し、そのときのトルクの余剰分をモータ・ジェネレータ30の回生により補償できないことを理由として、ステップS6で否定的に判断された場合に、ステップS3でおこなわれる制御を説明する。
【0064】
前記図9において、運転点bよりもエンジン回転数が相対的に低下すると、最適燃費線と必要出力線との間隔が狭くなる。つまり、エンジン回転数が相対的に低下するほど、モータ・ジェネレータ30の回生で補償する分のトルクが相対的に少なくなる傾向にある。そこで、最適燃費線と必要出力線との差に相当する余剰分のトルクが、モータ・ジェネレータ30の回生により補償可能なトルクとなるように、エンジン回転数を低下させることを想定する。例えば、運転点bから運転点gに変更すれば、最適燃費線と必要出力線との差に相当する余剰分のトルクを、モータ・ジェネレータ30の回生により補償可能であれば、運転点bに相当する回転数から、運転点gに相当する回転数まで、エンジン回転数が低下するように、変速機10で現在の変速段よりも上の変速段で係合される係合要素を滑らせる制御を想定する。そして、係合要素を滑らせたときの滑り損失と、エンジン2の燃焼効率の上昇分とを求める。
【0065】
このステップS3についで、前述と同じステップS4の判断がおこなわれ、ステップS4で否定的に判断された場合は、リターンする。このステップS4で肯定的に判断された場合は、変速機10の係合要素を滑らせてエンジン回転数を運転点gに相当する回転数まで低下させ、かつ、エンジントルクを運転点gに相当する値まで低下させる制御をおこない(ステップS8)、リターンする。また、このステップS8では、運転点gと、その運転点gと同じ回転数における必要出力線との差に相当する余剰分のトルクを、モータ・ジェネレータ30の回生により補う制御をおこなう。
【0066】
このように、図8の制御を実行すると、図1の制御と同じ処理をおこなう部分については、図1の制御と同様の効果を得られる。また、図8の制御では、エンジン2の運転点を最適燃費線上に位置させるとともに、そのエンジン2の運転点を、見かけ上、必要出力線上に位置させることができ、車両1における要求駆動力に対して実際の駆動力が過不足なく生じ、ドライバビリティが向上する。ここで、図8に示された機能的手段と、この発明の構成との対応関係を説明すると、ステップS1が、この発明の必要出力算出手段に相当し、ステップS8が、この発明の滑り制御手段に相当する。また、図2に示されたモータ・ジェネレータ30が、この発明のモータ・ジェネレータに相当する。
【0067】
なお、上記の2つの制御例において、ステップS2で運転点が最適燃費線上に位置しているか否かを判断するのではなく、運転点が、最適燃費線よりもトルクの高低方向で一定の範囲内にあるか否かを判断してもよい。つまり、この発明における基準値は、トルクの高低方向に一定の幅を備えていてもよい。また、選択可能な変速段が第1速から第7速までの変速機、選択可能な変速段が第1速から第6速までの変速機、選択可能な変速段が第1速から第5速までの変速機、選択可能な変速段が第1速から第4速までの変速機、選択可能な変速段が第1速から第3速までの変速機であっても、図1または図8の制御を実行できる。また、この発明における基準値は、図5および図9に示す特性線に代えて、数値として電子制御装置29に記憶しておいてもよい。あるいは、基準値を求める演算式を用いてもよい。また、変速機の変速段を設定するにあたり、図2に示された変速機は複数、具体的には2個の係合要素を係合する構成であるが、3個以上の係合要素を係合して変速段を形成する変速機、または単数の係合要素を係合して変速段を形成する変速機にも、図1および図8の制御を適用可能である。さらに、図8の制御を実行する対象となる車両は、モータ・ジェネレータが出力ギヤ24と一体回転する構成でもよい。あるいは、出力ギヤ24から車輪に至る経路にモータ・ジェネレータが設けられていてもよい。また、モータ・ジェネレータは交流型ではなく直流型でもよい。
【図面の簡単な説明】
【0068】
【図1】この発明の制御を示すフローチャートである。
【図2】この発明の制御を実行可能な車両の構成を示すスケルトン図である。
【図3】図2に示された変速機で変速段を形成する係合要素の動作を示す図表である。
【図4】図2に示された変速機を構成する回転要素の回転数を示す共線図である。
【図5】図2に示されたエンジンの回転数とトルクとの関係を示す特性線図である。
【図6】図2に示された変速機で実行可能な制御を示すタイムチャートである。
【図7】図2に示された変速機で実行可能な他の制御を示すタイムチャートである。
【図8】この発明の他の制御を示すフローチャートである。
【図9】図8に示す他の制御を説明する特性線図である。
【符号の説明】
【0069】
1…車両、 2…エンジン、 8…インプットシャフト、 10…変速機、 24…出力ギヤ、 30…モータ・ジェネレータ、 C1…第1クラッチ、 C2…第2クラッチ、 C3…第3クラッチ、 C4…第4クラッチ、 B1…第1ブレーキ、 B2…第2ブレーキ。
【特許請求の範囲】
【請求項1】
燃料を燃焼させて動力を発生するエンジンと、このエンジンから出力される動力の伝達経路に配置され、かつ、入力回転数と出力回転数との間の変速比を段階的に変更可能な変速機と、この変速機でいずれかの変速比を達成するときに係合され、かつ、前記変速機の入力部材と出力部材とを動力伝達可能に接続する係合要素とを備えた、車両の制御装置において、
前記エンジンの燃焼効率が、相対的に高いことを表す値として予め定められた基準値を満たすか否かを判断する効率判断手段と、
前記エンジンの燃焼効率が基準値を満たさないと判断された場合は、前記変速機でいずれかの変速比を設定するときに係合させる係合要素を滑らせてエンジン回転数を変化させることを想定して、その係合要素の滑りにより生じる動力損失を推定し、かつ、エンジン回転数の変化により生じるエンジンの燃焼効率の向上分を推定する推定手段と、
前記推定手段により推定された動力損失分と、前記推定手段により推定されたエンジンの効率の向上分とを比較して、何れが大きいかを判断する比較手段と、
この比較手段により、前記動力損失分よりも前記エンジンの燃焼効率の向上分の方が大きいと判断された場合に、前記係合要素を滑らせてエンジン回転数を変化させる滑り制御手段と
を備えていることを特徴とする車両の制御装置。
【請求項2】
前記エンジンから車輪に至る動力の伝達経路に、電気エネルギを運動エネルギに変換する力行と、運動エネルギを電気エネルギに変換する回生とをおこなうことのできるモータ・ジェネレータが設けられており、
前記車両における前後方向の要求駆動力に基づいて、前記エンジンの必要出力を求める必要出力算出手段を有し、
前記効率判断手段は、前記エンジン回転数およびエンジントルクを用いて前記エンジンの燃焼効率が前記基準値を満たすか否かを判断し、かつ、前記エンジン回転数およびエンジントルクで表される実出力が前記必要出力を満たすか否かを判断する手段を含み、
前記エンジン回転数およびエンジントルクが前記基準値を満たしておらず、かつ、前記実出力が前記必要出力を満たさないと判断された場合に、前記滑り制御手段は、係合要素を滑らせ、かつ、前記必要出力と前記実出力との差を相対的に少なくするように、前記モータ・ジェネレータを力行または回生する手段を含むことを特徴とする請求項1に記載の車両の制御装置。
【請求項1】
燃料を燃焼させて動力を発生するエンジンと、このエンジンから出力される動力の伝達経路に配置され、かつ、入力回転数と出力回転数との間の変速比を段階的に変更可能な変速機と、この変速機でいずれかの変速比を達成するときに係合され、かつ、前記変速機の入力部材と出力部材とを動力伝達可能に接続する係合要素とを備えた、車両の制御装置において、
前記エンジンの燃焼効率が、相対的に高いことを表す値として予め定められた基準値を満たすか否かを判断する効率判断手段と、
前記エンジンの燃焼効率が基準値を満たさないと判断された場合は、前記変速機でいずれかの変速比を設定するときに係合させる係合要素を滑らせてエンジン回転数を変化させることを想定して、その係合要素の滑りにより生じる動力損失を推定し、かつ、エンジン回転数の変化により生じるエンジンの燃焼効率の向上分を推定する推定手段と、
前記推定手段により推定された動力損失分と、前記推定手段により推定されたエンジンの効率の向上分とを比較して、何れが大きいかを判断する比較手段と、
この比較手段により、前記動力損失分よりも前記エンジンの燃焼効率の向上分の方が大きいと判断された場合に、前記係合要素を滑らせてエンジン回転数を変化させる滑り制御手段と
を備えていることを特徴とする車両の制御装置。
【請求項2】
前記エンジンから車輪に至る動力の伝達経路に、電気エネルギを運動エネルギに変換する力行と、運動エネルギを電気エネルギに変換する回生とをおこなうことのできるモータ・ジェネレータが設けられており、
前記車両における前後方向の要求駆動力に基づいて、前記エンジンの必要出力を求める必要出力算出手段を有し、
前記効率判断手段は、前記エンジン回転数およびエンジントルクを用いて前記エンジンの燃焼効率が前記基準値を満たすか否かを判断し、かつ、前記エンジン回転数およびエンジントルクで表される実出力が前記必要出力を満たすか否かを判断する手段を含み、
前記エンジン回転数およびエンジントルクが前記基準値を満たしておらず、かつ、前記実出力が前記必要出力を満たさないと判断された場合に、前記滑り制御手段は、係合要素を滑らせ、かつ、前記必要出力と前記実出力との差を相対的に少なくするように、前記モータ・ジェネレータを力行または回生する手段を含むことを特徴とする請求項1に記載の車両の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−18255(P2010−18255A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2008−183133(P2008−183133)
【出願日】平成20年7月14日(2008.7.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成20年7月14日(2008.7.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]