
車両の制御装置
【課題】ヨーレートの発生を抑制しつつ車両を目標とする運動状態に維持する。
【解決手段】前輪(FL、FR)又は後輪(RL、RR)の舵角を、該舵角の変化を促すドライバ操作から独立して変化させることが可能な舵角可変手段(400)と、前記前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段(300、600)とを備えた車両(10)を制御する装置(100)は、平行移動を実現するための、該平行移動を規定する複数の第1状態量の目標値を設定する第1設定手段と、予め設定された前記複数の第1状態量と前記舵角及び前記左右制駆動力差に夫々相関する複数の第2状態量との相対関係を規定する車両運動モデル、並びに前記設定された複数の第1状態量の目標値に基づいて、前記平行移動を実現するための前記複数の第2状態量の目標値を設定する第2設定手段とを具備する。
【解決手段】前輪(FL、FR)又は後輪(RL、RR)の舵角を、該舵角の変化を促すドライバ操作から独立して変化させることが可能な舵角可変手段(400)と、前記前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段(300、600)とを備えた車両(10)を制御する装置(100)は、平行移動を実現するための、該平行移動を規定する複数の第1状態量の目標値を設定する第1設定手段と、予め設定された前記複数の第1状態量と前記舵角及び前記左右制駆動力差に夫々相関する複数の第2状態量との相対関係を規定する車両運動モデル、並びに前記設定された複数の第1状態量の目標値に基づいて、前記平行移動を実現するための前記複数の第2状態量の目標値を設定する第2設定手段とを具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えばLKA(Lane Keeping Assist:車線維持走行のための操舵補助)等の各種自動運転機能を備えた車両に適用可能な、車両の制御装置の技術分野に関する。
【背景技術】
【0002】
この種の装置として、車両のヨーレートが目標ヨーレートとなるように各輪の制駆動力を制御するものが提案されている(特許文献1参照)。
【0003】
また、目標挙動制御量に基づいて、各輪の制駆動力及び舵角の目標制御量を算出するものも提案されている(特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平3−292221号公報
【特許文献2】特開2005−255107号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
車両を目標走行路に追従させる等の各種走行支援制御がなされる場合、車両には、ヨーレートの発生を伴うヨー挙動変化が生じることが多い。ところが、この種の走行支援制御は、ドライバの操舵操作を介在させることなくなされるから、ドライバにとって、ヨーレートの発生は一種の違和感となり易い。
【0006】
特許文献1に開示された車両の駆動力制御装置では、このような問題については一切考慮されていないから、各輪の制駆動力によってヨーレートを目標ヨーレートに収束させ得たとしても、上述の違和感の発生を抑制することができない。即ち、特許文献1に開示された装置において目標ヨーレートをゼロに設定し、ヨーレートを目標ヨーレートに収束させてしまえば、目標走行路への追従等といった所望される車両運動を得ることが全くできなくなってしまうのである。
【0007】
また、特許文献2に開示される装置は、制駆動力及び舵角によって目標挙動を得る旨の概念の開示はあっても、特許文献1と同様に、ヨーレートの発生がドライバに与える違和感についてはその記述がない。従って、同様に、この種の問題を解決することはできない。
【0008】
尚、非公知の概念としては、このようなヨーレートの発生を抑えた上での車両運動制御を、前後輪各々の舵角を独立制御可能な四輪操舵装置を利用して実現することは不可能ではない。然るに、四輪操舵装置は、前輪又は後輪のみを操舵する操舵装置と較べてシステム構成が大型化且つ複雑化する。このため、車両に搭載するにあたって生じる様々な制約を考慮した実践的運用面から見れば改善の余地がある。
【0009】
本発明は、上述した問題点に鑑みてなされたものであり、ヨーレートの発生を抑制しつつ車両を目標とする運動状態に維持可能な車両の制御装置を提供することを課題とする。
【課題を解決するための手段】
【0010】
上述した課題を解決するため、本発明に係る車両の制御装置は、前輪又は後輪の舵角を、該舵角の変化を促すドライバ操作から独立して変化させることが可能な舵角可変手段と、前記前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段とを備えた車両を制御する装置であって、ヨーレートが所定の不感帯相当値に抑制された横方向移動として規定される平行移動を実現するための、該平行移動を規定する複数の第1状態量の目標値を設定する第1設定手段と、予め設定された前記複数の第1状態量と前記舵角及び前記左右制駆動力差に夫々相関する複数の第2状態量との相対関係を規定する車両運動モデル、並びに前記設定された複数の第1状態量の目標値に基づいて、前記平行移動を実現するための前記複数の第2状態量の目標値を設定する第2設定手段とを具備することを特徴とする。
【0011】
本発明に係る車両は、舵角可変手段と制駆動力可変手段とを備える。
【0012】
舵角可変手段とは、前輪又は後輪の舵角を、これらの変化を促すドライバ操作から独立して変化させることが可能な手段である。このドライバ操作とは、好適には、ステアリングホイル等の各種操舵入力手段の操作を意味する。従って、舵角可変手段によれば、ドライバがステアリングホイルから手を放していても、或いはステアリングを保舵しているのみであっても、上記舵角を所望の値に変化させることが可能である。
【0013】
即ち、舵角可変手段とは、上記操舵入力手段から操舵輪(好適には、前輪)へ至る操舵入力の機械的伝達経路を担う通常の操舵機構とは本質的意味合いにおいて異なるものである。但し、物理構成上の観点から見れば、舵角可変手段の少なくとも一部は、この種の操舵機構と共用或いは共有されていてもよい。舵角可変手段は、好適な一形態としては、VGRS(Variable Gear Ratio Steering:ステアリングギア比可変装置)、SBW(Steering By Wire:電子制御舵角可変装置)又はARS(Active Rear Steering:後輪操舵装置)等の各種実践的態様を採り得る。
【0014】
舵角可変手段によれば、舵角の制御対象となる車輪(上記操舵入力手段と機械的に連結された操舵輪を含み得る)について、舵角が少なくとも一定の範囲で可変であるから、理論的には車両の進行方向をドライバの操舵入力とは無関係に変化させることが可能となる。
【0015】
制駆動力可変手段とは、前輪及び後輪における左右輪に制駆動力差を生じさせることが可能な手段であり、言い換えれば、各輪の制駆動力を各輪相互間で独立して制御することが可能な手段である。制駆動力可変手段は、好適な一形態として、例えば、駆動力分配デファレンシャル機構若しくはインホイールモータシステム等を含む駆動力可変装置、又はABS(Antilock Braking System)等を含む各種ECB(Electronic Controlled Braking system:電子制御制動装置)等の制動力可変装置、或いはその両方等の実践的態様を採り得る。
【0016】
制駆動力可変手段によれば、例えば内燃機関等の各種動力源から供給されるトルク(尚、トルクと駆動力とは一義的な関係を有し得る)は、その物理的、機械的又は電気的作用により所望の配分比率に従って左右輪に分配され、左右輪の駆動力の絶対値が増減制御された結果として左右駆動力差が生じ得る。或いは、例えば機関トルクとは独立した駆動力が左右輪に付与され、左右輪の駆動力の絶対値が増減制御された結果として左右駆動力差が生じ得る。
【0017】
一方、制駆動力可変手段が制動力可変装置である場合、左右輪に付与される、好適には摩擦制動力としての制動力を変化させることにより、付与される制動力の小さい側の車輪について、駆動力を相対的に高くすることと同等の効果を得るものである。即ち、制動力は、言わば負側の駆動力である。
【0018】
いずれにせよ左右輪で制駆動力差が生じると、車両は、駆動力の相対的に小さい車輪(即ち、制動力の相対的に大きい車輪である)の側(即ち、右側車輪の駆動力(制動力)が小さければ(大きければ)、右側である)へ旋回する。
【0019】
従って、制駆動力可変手段によれば、理論的には車両の進行方向をドライバの操舵入力とは無関係に変化させることが可能となる。
【0020】
本発明に係る車両の制御装置は、このような車両を制御する装置であって、例えば、一又は複数のCPU(Central Processing Unit)、MPU(Micro Processing Unit)、各種プロセッサ又は各種コントローラ、或いは更にROM(Read Only Memory)、RAM(Random Access Memory)、バッファメモリ又はフラッシュメモリ等の各種記憶手段等を適宜に含み得る、単体の或いは複数のECU(Electronic Controlled Unit)等の各種処理ユニット、各種コントローラ或いはマイコン装置等各種コンピュータシステム等の形態を採り得る。
【0021】
車量の運動状態制御、例えば、車両を目標走行路に追従させる或いは車両に目標走行路をトレースさせる等の制御が一種の自動操舵として行われる場合、通常、車両の進行方向の変化に応じて適宜ヨーレートが発生する。然るに、車両を目標運動状態に誘う一種の自動操舵において生じるヨーレートは、ドライバに操舵意思がないことに起因してドライバに違和感を与え易い。本発明に係る車両の制御装置は、そのような違和感を抑制した車両運動制御を可能としたものである。
【0022】
本発明に係る車両の制御装置によれば、第1設定手段により、車両の平行移動を実現するための、当該平行移動を規定する複数の第1状態量の目標値が設定される。
【0023】
本発明に係る「車両の平行移動」とは、ヨーレートが所定の不感帯相当値に抑制された状態での横方向移動として規定される。ここで、「不感帯相当値」とは、ドライバが、実質的にヨーレートが発生していない或いはヨーレートが気にならない旨の認識を抱き得る程度に低い値を包括する概念であって、好適な一形態としてはゼロ値又はゼロ相当値(ゼロと扱って実践上問題ない程度にゼロ近傍の値)を意味する。但し、例えば予め実験的に、経験的に、理論的に又は人間工学的見地に立ったシミュレーション等に基づいて、この種の不感帯相当値の上限を規定する明確な基準値が設定される場合には、不感帯相当値とは、そのような基準値未満の範囲内で規定される値であってもよい。いずれにせよ、「不感帯相当値」なる表現が、本発明の明確性を損なうことはない。
【0024】
平行移動がこのように定義される点に鑑みれば、目標車両運動としての平行移動を規定する第1状態量は、ヨーレートに対応する第1状態量と、横方向移動に対応する第1状態量の少なくとも二種類必要である。このような第1状態量は必ずしも一義的でないが、第1状態量は、好適な一形態として、ヨーレート及び車体スリップ角(車両の旋回接線方向に対する角度であり、車体の向きと車体の瞬間的な進行方向とのなす角度である)であってもよい。
【0025】
第1設定手段は、例えば、目標走行路に沿って車両を走行させるための参照値となり得る物理量としての位置状態偏差(即ち、維持すべき目標走行路と車両との相対的位置関係を規定する偏差であり、好適な一形態として、目標走行路に対する車両の横位置の偏差やヨー角偏差等を含み得る)に基づいて、或いは更に車速等の走行条件を参照して、これら第1状態量うち横方向移動に対応する第1状態量の目標値を設定する。この場合、第1状態量の目標値は、予め然るべき記憶手段に各種のパラメータ値と対応付けられる形でマップ化されて格納されていてもよいし、その都度然るべき演算アルゴリズムや演算式等に従って導かれてもよい。
【0026】
尚、第1状態量のうちヨーレートに対応する第1状態量は、不感帯相当値が固定値であれば、その都度設定される必要はなく、予め後述する車両運動モデルの一部として組み込まれていてもよい。即ち、この場合、厳密な意味で設定される第1状態量の目標値は、横方向移動に対応する第1状態量のみであってもよい。但し、このような場合についても、ヨーレートに対応する第1状態量が設定されている点に変わりはなく、いずれにせよ、本発明に係る第1設定手段の範疇であることは言うまでもない。
【0027】
一方、公知の運動方程式によれば、車両運動に複数の自由度を与えるには、可制御要素の数が、得ようとする自由度の数と同数必要となる。平行移動は、上述したように二自由度の運動制御であるから、可制御要素が複数あれば、これらの間に数値的な相対関係を規定することができる。本発明では、前輪又は後輪の舵角に相関する第2状態量及び左右制駆動力差に相関する第2状態量が、この可制御要素に相当しており、予めこれら可制御要素と上記第1状態量の各々との相対関係を規定するものとしての車両運動モデルが構築されている。本発明に係る第2設定手段は、この車両運動モデルに基づいて、平行移動を実現するための複数の第2状態量の目標値を設定するのである。
【0028】
従って、本発明によれば、この設定された複数の第2状態量の目標値に基づいて舵角可変手段及び制駆動力可変手段が制御された場合に、目標運動状態(即ち、ヨーレートが抑制された横方向移動としての平行移動)を実現することができるのである。
【0029】
尚、舵角に相関する第2状態量とは、無論舵角そのものを含み得る。同様に、左右制駆動力差に相関する第2状態量とは、無論左右制駆動力差そのものを含み得る。また、車両運動モデルは、概念的にはこのように規定されるものの、モデル内部に包含される各種要素値は多義的であってよい。
【0030】
本発明に係る車両の制御装置の一の態様では、前記第2状態量の各々が前記設定された目標値となるように前記舵角可変手段及び前記制駆動力可変手段を制御する制御手段を更に具備する。
【0031】
この態様によれば、制御手段により一種の自動操舵制御が実行され、第2状態量の各々が夫々設定された目標値となるように舵角可変手段及び制駆動力可変手段が制御される。従って、車両の平行移動が好適に実現される。
【0032】
尚、第2状態量は、夫々舵角及び制駆動力差に相関するから、第2状態量の目標値から目標舵角及び目標制駆動力差を決定することができる。この際、目標制駆動力差に対応する各輪の目標制駆動力は一義的ではないから、制御手段は、複数の候補値の中から、その時点の車両の走行条件やドライバ意思等に適した最適な解を目標制駆動力として設定してもよい。
【0033】
本発明に係る車両の制御装置の他の態様では、前記第1状態量は、前記車両のヨーレート相当値及び前記車両の車体スリップ角相当値である。
【0034】
平行移動の定義に鑑みれば、第1状態量としてヨーレート及び車体スリップ角は適当であり、これらを第1状態量とすることによって、高精度な平行移動が可能となる。
【0035】
本発明に係る車両の制御装置の他の態様では、前記第2状態量は、前記舵角及び前記車両の重心点周りのモーメントである。
【0036】
車両の重心点回りのモーメントは、各輪の制駆動力差によって生成することができる。従って、車両運動モデルを、この重心点回りのモーメントと前輪又は後輪の舵角とを第2状態量として構築することによって、車両の平行移動が好適に実現される。
【0037】
本発明に係る車両の制御装置の他の態様では、前記不感帯相当値は、少なくともゼロ値を含み且つ基準値以下の値である。
【0038】
この態様によれば、ヨーレートがゼロ値又はゼロ相当値といった比較的狭帯域で設定される場合と較べて、目標舵角及び目標制駆動力の採り得る範囲が拡大される。従って、目標舵角及び目標制駆動力をより最適化することが可能となり、実践上有益である。
【0039】
本発明に係る車両の制御装置の他の態様では、前記車両運動モデルは、前記車両の物理構成に応じて定まる時定数要素を含む。
【0040】
この態様によれば、車両運動モデルは時定数要素(周波数応答値)を含むため、例えば、横方向或いは旋回方向の位置変化が大きい場合であっても、車両の運動を精度良く制御することが可能となる。
【0041】
尚、時定数要素が車両運動モデルに基づいた第2状態量の目標値決定プロセスに与える影響は、車両の挙動変化が大きい程大きくなるが、反対に、車両の挙動変化が定常変化に留まるような定常的走行状態においては、これら時定数要素が第2状態量の目標値に与える影響は無視出来る程に小さくなる場合もある。
【0042】
従って、この態様における好適な一形態として、車両が定常状態にある場合には、時定数要素が無視されてもよい。この場合、演算負荷が軽減されて好適である。
【0043】
尚、車両が定常走行状態にあるか否かは、例えば、第1状態量(即ち、例えば、ヨーレート、車体スリップ角或いは横方向加速度等)の目標値の変化速度等に基づいてなされ得る。例えば、車体スリップ角やヨーレートの目標値が小さい場合、即ち、横加速度の変化が小さい場合や旋回運動が緩慢である場合等には、定常走行状態である旨の判断を下し得る。
【0044】
本発明に係る車両の制御装置の他の態様では、前記車両の車輪に発生する前後力、横力及び上下力のうち少なくとも一つを含む第1補正要素を特定する第1補正要素特定手段と、該特定された第1補正要素に基づいて前記車両運動モデルを補正する第1補正手段とを更に具備する。
【0045】
この態様によれば、車輪(実践的態様としてタイヤを好適に含む)に作用する前後力、横力及び上下力のうち少なくとも一つを含む第1補正要素に基づいて車両運動モデルが補正される。従って、車輪が上述の各種力を既に発生している状況においても、正確に第2状態量の目標値を決定することができ、車両を平行移動させることが可能となる。
【0046】
尚、第1補正要素特定手段に係る「特定」とは、検出、算出、推定、同定、選択又は取得等を広範な実践的態様を包括する概念である。
【0047】
本発明に係る車両の制御装置の他の態様では、前記車両に発生する前後方向加速度、横方向加速度及びロール剛性配分のうち少なくとも一つを含む第2補正要素を特定する第2補正要素特定手段と、該特定された第2補正要素に基づいて前記車両運動モデルを補正する第2補正手段とを更に具備する。
【0048】
この態様によれば、車両に前後方向加速度、横方向加速度及びロール剛性配分のうち少なくとも一つを含む第2補正要素に基づいて車両運動モデルが補正される。従って、車両が加減速、旋回或いはロール等による各種限界挙動付近で走行している状況においても、正確に第2状態量の目標値を決定することができ、車両を平行移動させることが可能となる。
【0049】
尚、第2補正要素特定手段に係る「特定」とは、検出、算出、推定、同定、選択又は取得等を広範な実践的態様を包括する概念である。
【0050】
本発明のこのような作用及び他の利得は次に説明する実施形態から明らかにされる。
【図面の簡単な説明】
【0051】
【図1】本発明の一実施形態に係る車両の構成を概念的に表してなる概略構成図である。
【図2】図1の車両においてなされるLKA制御のフローチャートである。
【発明を実施するための形態】
【0052】
以下、適宜図面を参照して本発明の車両の制御装置に係る実施形態について説明する。
<発明の実施形態>
<実施形態の構成>
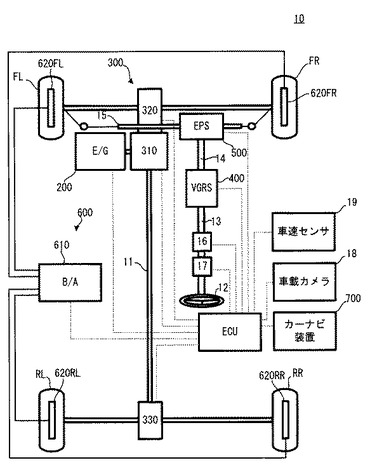
始めに、図1を参照して、本発明の一実施形態に係る車両10の構成について説明する。ここに、図1は、車両10の基本的な構成を概念的に表してなる概略構成図である。
【0053】
図1において、車両10は、左前輪FL、右前輪FR、左後輪RL及び右後輪RRの各車輪を備え、このうち操舵輪である左前輪FL及び右前輪FRの舵角変化によって所望の方向に進行することが可能な構成となっている。
【0054】
車両10は、ECU100、エンジン200、駆動力分配装置300、VGRSアクチュエータ400、EPSアクチュエータ500、ECB(Electronic Controlled Braking system:電子制御式制動装置)600及びカーナビゲーション装置700を備える。
【0055】
ECU100は、夫々不図示のCPU(Central Processing Unit)、ROM(Read Only Memory)及びRAM(Random Access Memory)を備え、車両10の動作全体を制御可能に構成された電子制御ユニットであり、本発明に係る「車両の制御装置」の一例である。ECU100は、ROMに格納された制御プログラムに従って、後述するLKA制御を実行可能に構成されている。
【0056】
尚、ECU100は、本発明に係る「第1設定手段」、「第2設定手段」、「制御手段」、「第1補正要素特定手段」、「第1補正手段」、「第2補正要素特定手段」及び「第2補正手段」の夫々一例として機能するように構成された一体の電子制御ユニットであり、これら各手段に係る動作は、全てECU100によって実行されるように構成されている。但し、本発明に係るこれら各手段の物理的、機械的及び電気的な構成はこれに限定されるものではなく、例えばこれら各手段は、複数のECU、各種処理ユニット、各種コントローラ或いはマイコン装置等各種コンピュータシステム等として構成されていてもよい。
【0057】
エンジン200は、車両10の駆動力源として機能するV型6気筒ガソリンエンジンである。尚、本発明に係る車両の動力源は、燃料の燃焼を機械的動力に変換して取り出し得る機関を包括する概念として各種実践的態様を有する内燃機関(エンジン200もその一例である)に限定されず、モータ等の回転電機であってもよい。或いは、車両は、これらが協調制御される所謂ハイブリッド車両であってもよい。エンジン200の駆動力出力軸たるクランク軸は、駆動力分配装置の一構成要素たるセンターデファレンシャル装置310に接続されている。尚、エンジン200の詳細な構成は、本発明の要旨との相関が薄いため、ここではその詳細を割愛する。
【0058】
駆動力分配装置300は、エンジン200から前述のクランク軸を介して伝達されるエンジントルクTeを、前輪及び後輪に所定の比率で分配可能に構成されると共に、更に前輪及び後輪の各々において左右輪の駆動力配分を変化させることが可能に構成された、本発明に係る「制駆動力可変手段」の一例である。駆動力分配装置300は、センターデファレンシャル装置310(以下、適宜「センターデフ310」と略称する)、フロントデファレンシャル装置320(以下、適宜「フロントデフ320」と略称する)及びリアデファレンシャル装置330(以下、適宜「リアデフ330」と略称する)を備える。
【0059】
センターデフ310は、エンジン200から供給されるエンジントルクTeを、フロントデフ320及びリアデフ330に分配するLSD(Limited Slip Differential:差動制限機能付き差動機構)である。センターデフ310は、前後輪に作用する負荷が略一定な条件下では、前後輪に対し分配比50:50(一例であり限定されない)でエンジントルクTeを分配する。また、前後輪のうち一方の回転速度が他方に対し所定以上高くなると、当該一方に対し差動制限トルクが作用し、当該他方へトルクが移譲される差動制限が行われる構成となっている。即ち、センターデフ310は、所謂回転速度感応式(ビスカスカップリング式)の差動機構である。
【0060】
尚、センターデフ310は、このような回転速度感応式に限らず、入力トルクに比例して差動制限作用が大きくなるトルク感応式の差動機構であってもよい。また、遊星歯車機構により差動作用をなし、電磁クラッチの断続制御により差動制限トルクを連続的に変化させ、所定の調整範囲内で所望の分配比率を実現可能な分配比率可変型の差動機構であってもよい。いずれにせよ、センターデフ310は、前輪及び後輪に対しエンジントルクTeを分配可能な限り、公知非公知を問わず各種の実践的態様を採ってよい。
【0061】
フロントデフ320は、センターデフ310によりフロントアクスル(前輪車軸)側に分配されたエンジントルクTeを、更に、左右輪に所定の調整範囲内で設定される所望の分配比率で分配可能な分配比率可変型のLSDである。フロントデフ320は、リングギア、サンギア及びピニオンキャリアからなる遊星歯車機構と、差動制限トルクを与える電磁クラッチを備え、この遊星歯車機構のリングギアにデフケースが、サンギア及びキャリアに夫々左右の車軸が連結された構成を採る。また、差動制限トルクは、電磁クラッチに対する通電制御により連続的に制御され、フロントデフ320の物理的電気的構成上定まる所定の調整範囲内で、トルクの分配比率が連続的に可変に制御される構成となっている。
【0062】
フロントデフ320は、ECU100と電気的に接続されており、電磁クラッチへの通電制御もECU100により制御される構成となっている。従って、ECU100は、フロントデフ320の駆動制御を介して、所望の前輪制駆動力差(ここでは、駆動力差である)Ffを生じさせることが可能である。尚、フロントデフ320の構成は、左右輪に所望の分配比率で駆動力(尚、トルクと駆動力とは一義的な関係にある)を分配可能な限りにおいて、ここに例示されるものに限定されず、公知非公知を問わず各種の態様を有し得る。いずれにせよ、このような左右駆動力配分作用は公知であり、ここでは、説明の煩雑化を防ぐ目的からここではその詳細については触れないこととする。
【0063】
リアデフ330は、センターデフ310によりプロペラシャフト11を介してリアアクスル(後輪車軸)側に分配されたエンジントルクTeを、更に、左右輪に所定の調整範囲内で設定される所望の分配比率で分配可能な分配比率可変型のLSDである。リアデフ330は、リングギア、サンギア及びピニオンキャリアからなる遊星歯車機構と、差動制限トルクを与える電磁クラッチを備え、この遊星歯車機構のリングギアにデフケースが、サンギア及びキャリアに夫々左右の車軸が連結された構成を採る。また、差動制限トルクは、電磁クラッチに対する通電制御により連続的に制御され、リアデフ330の物理的電気的構成上定まる所定の調整範囲内で、トルクの分配比率が連続的に可変に制御される構成となっている。
【0064】
リアデフ330は、ECU100と電気的に接続されており、電磁クラッチへの通電制御もECU100により制御される構成となっている。従って、ECU100は、リアデフ330の駆動制御を介して、所望の後輪制駆動力差(ここでは、駆動力差である)Frを生じさせることが可能である。尚、リアデフ330の構成は、左右輪に所望の分配比率で駆動力(尚、トルクと駆動力とは一義的な関係にある)を分配可能な限りにおいて、ここに例示されるものに限定されず、公知非公知を問わず各種の態様を有し得る。いずれにせよ、このような左右駆動力配分作用は公知であり、ここでは、説明の煩雑化を防ぐ目的からここではその詳細については触れないこととする。
【0065】
VGRSアクチュエータ400は、ハウジング、VGRSモータ、減速機構及びロック機構(いずれも不図示)等を備えた操舵伝達比可変装置であり、本発明に係る「舵角可変手段」の一例である。
【0066】
VGRSアクチュエータ400において、VGRSモータ、減速機構及びロック機構は、ハウジングに収容されている。このハウジングは、操舵入力手段としてのステアリングホイル12に連結されたアッパーステアリングシャフト13の下流側の端部と固定されており、アッパーステアリングシャフト13と略一体に回転可能に構成されている。
【0067】
VGRSモータは、回転子たるロータ、固定子たるステータ及び駆動力の出力軸たる回転軸を有するDCブラシレスモータである。ステータは、ハウジング内部に固定されており、ロータは、ハウジング内部で回転可能に保持されている。回転軸は、ロータと同軸回転可能に固定されており、その下流側の端部が減速機構に連結されている。このステータには、不図示の電気駆動回路から駆動電圧が供給される構成となっている。
【0068】
減速機構は、差動回転可能な複数の回転要素を有する遊星歯車機構である。この複数の回転要素の一回転要素は、VGRSモータの回転軸に連結されており、また、他の回転要素の一は、前述のハウジングに連結されている。そして残余の回転要素が、ロアステアリングシャフト14に連結されている。
【0069】
このような構成を有する減速機構によれば、ステアリングホイル12の操作量に応じたアッパーステアリングシャフト13の回転速度(即ち、ハウジングの回転速度)と、VGRSモータの回転速度(即ち、回転軸の回転速度)とにより、残余の一回転要素に連結されたロアステアリングシャフト14の回転速度が一義的に決定される。この際、回転要素相互間の差動作用により、VGRSモータの回転速度を増減制御することによって、ロアステアリングシャフト14の回転速度を増減制御することが可能となる。即ち、VGRSモータ及び減速機構の作用により、アッパーステアリングシャフト13とロアステアリングシャフト14とは相対回転可能である。尚、減速機構における各回転要素の構成上、VGRSモータの回転速度は、各回転要素相互間のギア比に応じて定まる所定の減速比に従って減速された状態でロアステアリングシャフト14に伝達される。
【0070】
このように、車両10では、アッパーステアリングシャフト13とロアステアリングシャフト14とが相対回転可能であることによって、アッパーステアリングシャフト13の回転量たる操舵角MAと、ロアステアリングシャフト14の回転量に応じて一義的に定まる(後述するラックアンドピニオン機構のギア比も関係する)操舵輪たる前輪の舵角δfとの比たる操舵伝達比が、予め定められた範囲で連続的に可変となる。
【0071】
尚、ロック機構は、VGRSモータ側のクラッチ要素とハウジング側のクラッチ要素とを備えたクラッチ機構である。両クラッチ要素が相互に係合した状態においては、アッパーステアリングシャフト13とVGRSモータの回転軸との回転速度が一致するため、必然的にロアステアリングシャフト14との回転速度もこれらと一致する。即ち、アッパーステアリングシャフト13とロアステアリングシャフト14とが直結状態となる。但し、ロック機構の詳細については、本発明との相関が薄いためここでは割愛する。
【0072】
尚、VGRSアクチュエータ400は、ECU100と電気的に接続されており、その動作はECU100により制御される構成となっている。
【0073】
車両10において、ロアステアリングシャフト14の回転は、ラックアンドピニオン機構に伝達される。ラックアンドピニオン機構は、ロアステアリングシャフト14の下流側端部に接続された不図示のピニオンギア及び当該ピニオンギアのギア歯と噛合するギア歯が形成されたラックバー15を含む操舵伝達機構であり、ピニオンギアの回転がラックバー15の図中左右方向の運動に変換されることにより、ラックバー15の両端部に連結されたタイロッド及びナックル(符号省略)を介して操舵力が各操舵輪に伝達される構成となっている。即ち、ステアリングホイル12から各前輪に至る操舵力の伝達機構は、本発明に係る「操舵装置」の一例である。
【0074】
EPSアクチュエータ500は、永久磁石が付設されてなる回転子たる不図示のロータと、当該ロータを取り囲む固定子であるステータとを含むDCブラシレスモータとしてのEPSモータを備えた操舵トルク補助装置である。このEPSモータは、不図示の電気駆動装置を介した当該ステータへの通電によりEPSモータ内に形成される回転磁界の作用によってロータが回転することにより、その回転方向にアシストトルクTAを発生可能に構成されている。
【0075】
一方、EPSモータの回転軸たるモータ軸には、不図示の減速ギアが固定されており、この減速ギアはまた、ロアステアリングシャフト14に設けられた減速ギアと噛合している。このため、本実施形態において、EPSモータから発せられるアシストトルクTAは、ロアステアリングシャフト14の回転をアシストするトルクとして機能する。このため、アシストトルクTAが、ステアリングホイル12を介してアッパーステアリングシャフト13に与えられるドライバ操舵トルクMTと同一方向に付与された場合には、ドライバの操舵負担は、アシストトルクTAの分だけ軽減される。
【0076】
尚、EPSアクチュエータ500は、ECU100と電気的に接続されており、その動作はECU100により制御される構成となっている。
【0077】
車両10には、操舵角センサ16及び操舵トルクセンサ17が備わる。
【0078】
操舵角センサ16は、アッパーステアリングシャフト13の回転量を表す操舵角MAを検出可能に構成された角度センサである。操舵角センサ16は、ECU100と電気的に接続されており、検出された操舵角MAは、ECU100により一定又は不定の周期で参照される構成となっている。
【0079】
操舵トルクセンサ17は、ドライバからステアリングホイル12を介して与えられるドライバ操舵トルクMTを検出可能に構成されたセンサである。より具体的に説明すると、アッパーステアリングシャフト13は、上流部と下流部とに分割されており、図示せぬトーションバーにより相互に連結された構成を有している。係るトーションバーの上流側及び下流側の両端部には、回転位相差検出用のリングが固定されている。このトーションバーは、車両10のドライバがステアリングホイル12を操作した際にアッパーステアリングシャフト13の上流部を介して伝達される操舵トルク(即ち、ドライバ操舵トルクMT)に応じてその回転方向に捩れる構成となっており、係る捩れを生じさせつつ下流部に操舵トルクを伝達可能に構成されている。従って、操舵トルクの伝達に際して、先に述べた回転位相差検出用のリング相互間には回転位相差が発生する。操舵トルクセンサ17は、係る回転位相差を検出すると共に、係る回転位相差を操舵トルクに換算してドライバ操舵トルクMTに対応する電気信号として出力可能に構成されている。操舵トルクセンサ17は、ECU100と電気的に接続されており、検出されたドライバ操舵トルクMTは、ECU100により一定又は不定の周期で参照される構成となっている。
【0080】
ECB600は、車両10の前後左右各輪に個別に制動力を付与可能に構成された、本発明に係る「制駆動力可変手段」の他の一例たる電子制御式制動装置である。ECB600は、ブレーキアクチュエータ610並びに左前輪FL、右前輪FR、左後輪RL及び右後輪RRに夫々対応する制動装置620FL、620FR、620RL及び620RRを備える。
【0081】
ブレーキアクチュエータ610は、制動装置620FL、620FR、620RL及び620RRに対し、夫々個別に作動油を供給可能に構成された油圧制御用のアクチュエータである。ブレーキアクチュエータ610は、マスタシリンダ、電動オイルポンプ、複数の油圧伝達通路及び当該油圧伝達通路の各々に設置された電磁弁等から構成されており、電磁弁の開閉状態を制御することにより、各制動装置に備わるホイルシリンダに供給される作動油の油圧を制動装置各々について個別に制御可能に構成されている。作動油の油圧は、各制動装置に備わるブレーキパッドの押圧力と一対一の関係にあり、作動油の油圧の高低が、各制動装置における制動力の大小に夫々対応する構成となっている。
【0082】
ブレーキアクチュエータ610は、ECU100と電気的に接続されており、各制動装置から各車輪に付与される制動力は、ECU100により制御される構成となっている。
【0083】
車両10は、車載カメラ18及び車速センサ19を備える。
【0084】
車載カメラ18は、車両10のフロントノーズに設置され、車両10の前方における所定領域を撮像可能に構成された撮像装置である。車載カメラ18は、ECU100と電気的に接続されており、撮像された前方領域は、画像データとしてECU100に一定又は不定の周期で送出される構成となっている。ECU100は、この画像データを解析し、後述するLKA制御に必要な各種データを取得可能である。
【0085】
車速センサ19は、車両10の速度たる車速Vを検出可能に構成されたセンサである。車速センサ19は、ECU100と電気的に接続されており、検出された車速Vは、ECU100により一定又は不定の周期で参照される構成となっている。
【0086】
カーナビゲーション装置700は、車両10に設置されたGPSアンテナ及びVICSアンテナを介して取得される信号に基づいて、車両10の位置情報、車両10の周辺の道路情報(道路種別、道路幅、車線数、制限速度及び道路形状等)、信号機情報、車両10の周囲に設置された各種施設の情報、渋滞情報及び環境情報等を含む各種ナビゲーション情報を提供可能な装置である。カーナビゲーション装置700は、ECU100と電気的に接続されており、ECU100によりその動作状態が制御される構成となっている。
【0087】
<実施形態の動作>
<LKA制御の詳細>
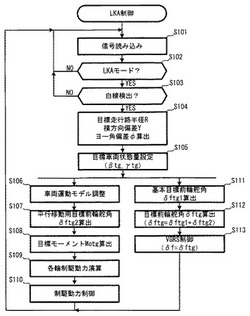
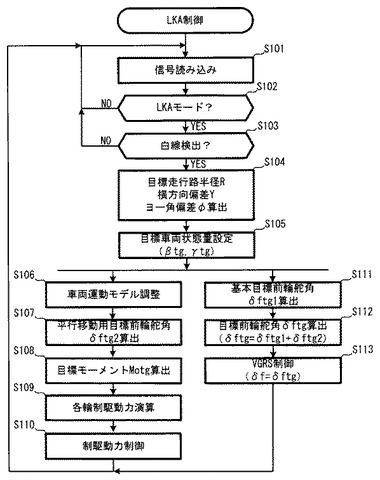
以下、図2を参照し、本実施形態の動作として、ECU100により実行されるLKA制御の詳細について説明する。ここに、図2は、LKA制御のフローチャートである。尚、LKA(Lane Keeping Assist)制御は、車両10を目標走行路(本実施形態では、即ち車線(レーン)である)に追従させる制御であり、車両10において実行される走行支援制御の一つである。
【0088】
図2において、ECU100は、車両10に備わる各種スイッチ類の操作信号、各種フラグ及び上記各種センサに係るセンサ信号等を含む各種信号を読み込む(ステップS101)と共に、予め車両10の車室内に設置されたLKAモード発動用の操作ボタンがドライバにより操作される等した結果としてLKAモードが選択されているか否かを判別する(ステップS102)。LKAモードが選択されていない場合(ステップS102:NO)、ECU100は、処理をステップS101に戻す。
【0089】
LKAモードが選択されている場合(ステップS102:YES)、ECU100は、車載カメラ18から送出される画像データに基づいて、LKAの目標走行路を規定する白線(白色である必要はない)が検出されているか否かを判別する(ステップS103)。
【0090】
白線が検出されていない場合(ステップS103:NO)、仮想の目標走行路を設定することができないため、ECU100は、処理をステップS101に戻す。一方、白線が検出されている場合(ステップS103:YES)、ECU100は、車両10を目標走行路に追従させるに際して必要となる各種路面情報を算出する(ステップS104)。
【0091】
ステップS104においては、公知の手法に基づいて、白線と車両10との横方向の偏差たる横方向偏差Y及び白線と車両10とのヨー角偏差φが算出される。
【0092】
これら各種路面情報が算出されると、ECU100は、車両10を目標走行路へ追従させるために必要となる目標車両状態量として、車体スリップ角βの目標値たる目標車体スリップ角βtgとヨーレートγの目標値たる目標ヨーレートγtgを設定する(ステップS105)。尚、これら目標車両状態量は、本発明に係る「第1状態量」の一例である。また、ステップS105は、本発明に係る「第1設定手段」の動作の一例である。
【0093】
尚、本実施形態において、目標ヨーレートγtgはゼロ値であり固定値である。従って、ステップS105が訪れる毎にECU100が目標ヨーレートγtgを設定する必要はなく、目標ヨーレートγtgは、後述するように車両運動モデルの一部に組み込まれていてもよい。
【0094】
一方、目標車体スリップ角βtgは、予めROM等の然るべき記憶手段に、上記横方向偏差Y及びヨー角偏差φに対応付けられる形でマップ化されて格納されており、ECU100は、ステップS104において算出された各路面情報に応じて適宜該当する値を選択することにより目標車体スリップ角βtgを設定する。
【0095】
目標車両状態量が設定されると、処理は二系統に分岐する。即ち、一方の系統は、VGRSアクチュエータ400による舵角制御であり、他方の系統は、駆動力分配装置300及びECB600による各輪の制駆動力制御である。
【0096】
始めに、制駆動力制御について説明する。
【0097】
制駆動力制御においては、先ず、車両運動モデルが調整される(ステップS106)。ここで、「車両運動モデル」とは、ヨーレートγ及び車体スリップ角βからなる車両状態量(第1状態量)と、前輪舵角δf及び重心回りモーメントMo(これらは、本発明に係る「第2状態量」の一例である)との相対関係を規定するシミュレーションモデルであり、数値要素が予めROMに格納されている。尚、車両運動モデル及びステップS106に係るその調整については後述する。
【0098】
車両運動モデルの調整が終了すると、ECU100は、平行移動用目標前輪舵角δftg2を算出する(ステップS107)。平行移動用目標前輪舵角δftg2とは、車両10が目標走行路をトレースするにあたる前輪舵角であり、これも車両運動モデルから算出される。平行移動用目標前輪舵角δftg2の設定についても後述する。
【0099】
平行移動用目標前輪舵角δftg2が算出されると、ECU100は、目標重心回りモーメントMotgを算出する(ステップS108)。目標重心回りモーメントMotgの設定についても後述する。尚、ステップS107及びS108は、本発明に係る「第2設定手段」の動作の一例である。
【0100】
目標重心回りモーメントMotgが算出されると、ECU100は、各輪の目標制駆動力を設定し(ステップS109)、設定された目標制駆動力に従って、駆動力分配装置300及びECB600を適宜制御する(ステップS110)。ステップS110が終了すると、処理はステップS101に戻される。制駆動力制御はこのように実行される。
【0101】
尚、目標重心回りモーメントMotgと前輪左右駆動力差Ff及び後輪左右駆動力差Frとの関係は、公知であり且つ明確な数値関係として規定することができる。従って、ECU100は、目標重心回りモーメントMotgに基づいて、前輪左右制駆動力差Ff及び後輪左右制駆動力差Frの目標値を一義に決定することができる。
【0102】
一方、前輪左右制駆動力差Ff及び後輪左右制駆動力差Frは、夫々駆動力によって実現しても制動力によって実現してもよいから、これらの目標値を実現するための各輪の目標制駆動力の設定態様は、実践上必ずしも一義的でないが、目標制駆動力差が得られる限りにおいて、車両10の目標運動としての平行移動は担保される。
【0103】
次に、舵角制御について説明する。
【0104】
舵角制御では、先ず基本目標前輪舵角δftg1が算出される(ステップS111)。基本目標前輪舵角δftg1とは、ドライバが自身の意思で行う操舵操作に対し付与すべき前輪舵角であり、通常の操舵制御の範疇に属する舵角である。基本目標前輪舵角δftg1は、ドライバがステアリングホイル12を保舵するのみ、或いはステアリングホイル12から手を放している場合、ゼロである。
【0105】
基本目標前輪舵角δftg1が算出されると、ECU100は、ステップS107において算出された平行移動用目標前輪舵角δftg2を取得し、前輪舵角δfの目標値たる目標前輪舵角δftgを算出する(ステップS112)。尚、この際、δftg=δftg1+δftg2なる関係が成立する。
【0106】
目標前輪舵角δftgが算出されると、ECU100は、前輪舵角δfがこの算出された目標前輪舵角δftgとなるように、VGRSアクチュエータ400を制御する(ステップS113)。前輪舵角δfの制御が開始されると、処理はステップS101に戻され、一連の処理が繰り返される。LKA制御は以上のように実行される。
【0107】
尚、ステップS110及びS113は、本発明に係る「制御手段」の動作の一例である。
<車両運動モデルに基づいた状態量制御の詳細>
ここで、車両運動モデルの詳細について説明する。
【0108】
車両運動モデルは、下記(1)に如くに規定される。尚、(1)式は、便宜上、本発明に係る「第2状態量」として、前輪舵角δf及び重心回りモーメントMoに加えて、後輪舵角δrまで考慮された式である。本実施形態に係る車両10には後輪操舵機能は付帯していないから、後輪舵角δrは可制御要素とはならず、第2状態量とはなり得ないが、概念的には、前輪舵角δf及び重心回りモーメントMoと同様に、第2状態量の一例として機能し得る。即ち、車両10にARS等の後輪操舵装置が備わる場合には、前輪舵角δfに代えて後輪舵角δrを第2状態量とすることも可能である。従って、これ以降、適宜後輪舵角δrも考慮した式展開を記載することとする。
【0109】
【数1】

ここで、(1)式におけるΔ(s)並びに係数A11、A12、A13、A21、A22、A23、A31、A32及びA33は、夫々、下記(2)乃至(8)の如くに規定される。
【0110】
【数2】
【0111】
【数3】
【0112】
【数4】
【0113】
【数5】
【0114】
【数6】
【0115】
【数7】
【0116】
【数8】
尚、上記各式における各参照記号の表す意味は以下の通りである。
【0117】
M・・・車両重量
V・・・車速
lf・・・車両重心-フロント車軸距離
lr・・・車両重心-リア車軸距離
l・・・lf+lr(=ホイールベース)
Kf・・・前輪コーナリングパワー
Kr・・・後輪コーナリングパワー
s・・・ラプラス演算子
ここで、本実施形態では、目標ヨーレートγtg=0であるから、下記(9)式及び(10)式が成立する。尚、(9)式は、重心回りモーメントMoと前輪舵角との関係を表す関係式であり、(10)式は、重心回りモーメントMoと後輪舵角との関係を表す関係式である。
【0118】
【数9】
【0119】
【数10】
最終的に、下記の通り、(9)式に対応する(11)式及び(10)式に対応する(12)式を得る。
【0120】
【数11】
【0121】
【数12】
上記(11)式及び(12)式におけるG、τ1、τ2、τ3及びτ4は、夫々車両10の物理構成及び走行条件に応じて一義に定まる値である。従って、ECU100は、図2のステップS108において、上記(11)式を使用し、目標重心回りモーメントMotgを平行移動用目標前輪舵角δftg2に基づいて決定することができる。
【0122】
一方、上記(1)式を車体スリップ角βについて解くと、下記(13)式が得られる。
【0123】
【数13】
ここで、β=βtgとし且つMoとして上記(11)式を代入することにより、目標車体スリップ角βtgと前輪舵角δfとの関係式を構築することができる。ECU100は、図2のステップS107において、係る関係式を利用することにより、平行移動用目標前輪舵角δftg2を決定することができる。
【0124】
このようにして、車両10を平行移動させるための第2状態量としての、平行移動用目標前輪舵角δftg2及び目標重心回りモーメントMotgが決定されるのである。従って、図2のステップS110及びS113において、これらを実現するための制駆動力制御及び舵角制御が実行された場合に、車両10は、ヨーレートが抑制された横方向移動、即ち平行移動を行うことができるのである。
【0125】
尚、ARS等の後輪操舵装置が備わる場合についても、上記(12)式を利用することにより同様にしてこれら第2状態量を決定することができる。
【0126】
次に、図2のステップS106における車両運動モデルの調整について説明する。尚、ドライバ操舵から独立して舵角制御を行い得る操舵デバイスとして、本実施形態ではVGRSアクチュエータ400が採用されており、第2状態量は即ち前輪舵角δfである。従って、これ以降は、後輪舵角δrが使用される場合の詳細については説明しない。但し、後輪舵角δrを第2状態量として使用する場合の制御が、基本的に前輪舵角δfと同様であることは、上記(11)式及び(12)式の相互関係からみて明白であろう。
【0127】
上記(9)式を使用すると、下記(14)式におけるG、τ1及びτ2は、夫々下記(14)乃至(16)式として表すことができる。
【0128】
【数14】
【0129】
【数15】
【0130】
【数16】
このように、重心回りモーメントMoと前輪舵角δfとの関係性(これもまた、本発明に係る「車両運動モデル」の一例である)を与えるG、τ1及びτ2は、車速Vに応じて変化する、夫々本発明に係る「時定数要素」の一例である。車両運動モデルには、このように車両10の動的要素が含まれており、車両10の実挙動を正確に反映することが可能となっている。
【0131】
ここで、車両10の多様な実挙動にロバストな平行移動を実現する観点からは、上記係数a1、a2及びa3は、その時点における車両運動に応じて可変であるのが望ましい。そこで、図2のステップS106において、ECU100は、(ア)前後輪のタイヤと路面との摩擦係数、(イ)前後輪のタイヤに発生している前後力、横力及び上下力、(ウ)車両10に発生している前後加速度並びに(エ)車両10に発生する横加速度及びロール剛性配分の夫々の補正要素に基づいて、上記係数a1、a2及びa3を調整する。
【0132】
より具体的には、補正対象は、(ア)の場合kf及びkrであり、(イ)の場合Kf及びKrであり、(ウ)の場合lf及びlrであり、(エ)の場合kf及びkrである。車両10の動的特性を規定する場合、車両10と路面との唯一の接地部分であるタイヤの状態は重要であり、(ア)、(イ)及び(エ)に応じて前後輪のコーナリングパワーが補正される。また、(ウ)の補正要素は、車両10の重心位置を過渡的に変化させるため、重心と車軸との距離に影響を与えるのである。
【0133】
各補正要素の値と補正後のKf、Kr、lf及びlrの値は、予めマップ化されてROMに格納されている。また、各補正要素の値は、公知の各種態様に従って特定することができるものであり、ここではその詳細については触れないこととする。尚、これら補正要素値の特定に際して適宜必要となるデバイスは、適宜車両10に備わっているものとする。
【0134】
尚、車両10の動的特性が無視できる定常的な走行状態においては、上記(11)式は結局「Mo=-Gδf」となり、車両重心モーメントMoは、前輪舵角δfとGのみの関数として扱うことができる。ECU100は、このような関係が成立し得る走行条件において、適宜この簡略的関係に従って目標重心回りモーメントMotg及び平行移動用目標前輪舵角δftg2を算出する。このため、平行移動に関する挙動制御の精度を低下させることなく演算負荷を軽減することができる。
【0135】
本発明は、上述した実施例に限られるものではなく、請求の範囲及び明細書全体から読み取れる発明の要旨或いは思想に反しない範囲で適宜変更可能であり、そのような変更を伴う車両の制御装置もまた本発明の技術的範囲に含まれるものである。
【産業上の利用可能性】
【0136】
本発明は、例えば、車両を目標走行路に追従させる機能を有する車両に利用可能である。
【符号の説明】
【0137】
FL、FR、RL、RR…車輪、10…車両、11…プロペラシャフト、12…ステアリングホイル、13…アッパーステアリングシャフト、14…ロアステアリングシャフト、15…ラックバー、16…操舵角センサ、17…操舵トルクセンサ、100…ECU、200…エンジン、300…制駆動力分配装置、310…センターデファレンシャル機構、320…フロントデファレンシャル機構、330…リアデファレンシャル機構、400…VGRSアクチュエータ、500…EPSアクチュエータ、600…ECB、610…ブレーキアクチュエータ、620FL、620FR、620RL、620RR…制動装置。
【技術分野】
【0001】
本発明は、例えばLKA(Lane Keeping Assist:車線維持走行のための操舵補助)等の各種自動運転機能を備えた車両に適用可能な、車両の制御装置の技術分野に関する。
【背景技術】
【0002】
この種の装置として、車両のヨーレートが目標ヨーレートとなるように各輪の制駆動力を制御するものが提案されている(特許文献1参照)。
【0003】
また、目標挙動制御量に基づいて、各輪の制駆動力及び舵角の目標制御量を算出するものも提案されている(特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平3−292221号公報
【特許文献2】特開2005−255107号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
車両を目標走行路に追従させる等の各種走行支援制御がなされる場合、車両には、ヨーレートの発生を伴うヨー挙動変化が生じることが多い。ところが、この種の走行支援制御は、ドライバの操舵操作を介在させることなくなされるから、ドライバにとって、ヨーレートの発生は一種の違和感となり易い。
【0006】
特許文献1に開示された車両の駆動力制御装置では、このような問題については一切考慮されていないから、各輪の制駆動力によってヨーレートを目標ヨーレートに収束させ得たとしても、上述の違和感の発生を抑制することができない。即ち、特許文献1に開示された装置において目標ヨーレートをゼロに設定し、ヨーレートを目標ヨーレートに収束させてしまえば、目標走行路への追従等といった所望される車両運動を得ることが全くできなくなってしまうのである。
【0007】
また、特許文献2に開示される装置は、制駆動力及び舵角によって目標挙動を得る旨の概念の開示はあっても、特許文献1と同様に、ヨーレートの発生がドライバに与える違和感についてはその記述がない。従って、同様に、この種の問題を解決することはできない。
【0008】
尚、非公知の概念としては、このようなヨーレートの発生を抑えた上での車両運動制御を、前後輪各々の舵角を独立制御可能な四輪操舵装置を利用して実現することは不可能ではない。然るに、四輪操舵装置は、前輪又は後輪のみを操舵する操舵装置と較べてシステム構成が大型化且つ複雑化する。このため、車両に搭載するにあたって生じる様々な制約を考慮した実践的運用面から見れば改善の余地がある。
【0009】
本発明は、上述した問題点に鑑みてなされたものであり、ヨーレートの発生を抑制しつつ車両を目標とする運動状態に維持可能な車両の制御装置を提供することを課題とする。
【課題を解決するための手段】
【0010】
上述した課題を解決するため、本発明に係る車両の制御装置は、前輪又は後輪の舵角を、該舵角の変化を促すドライバ操作から独立して変化させることが可能な舵角可変手段と、前記前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段とを備えた車両を制御する装置であって、ヨーレートが所定の不感帯相当値に抑制された横方向移動として規定される平行移動を実現するための、該平行移動を規定する複数の第1状態量の目標値を設定する第1設定手段と、予め設定された前記複数の第1状態量と前記舵角及び前記左右制駆動力差に夫々相関する複数の第2状態量との相対関係を規定する車両運動モデル、並びに前記設定された複数の第1状態量の目標値に基づいて、前記平行移動を実現するための前記複数の第2状態量の目標値を設定する第2設定手段とを具備することを特徴とする。
【0011】
本発明に係る車両は、舵角可変手段と制駆動力可変手段とを備える。
【0012】
舵角可変手段とは、前輪又は後輪の舵角を、これらの変化を促すドライバ操作から独立して変化させることが可能な手段である。このドライバ操作とは、好適には、ステアリングホイル等の各種操舵入力手段の操作を意味する。従って、舵角可変手段によれば、ドライバがステアリングホイルから手を放していても、或いはステアリングを保舵しているのみであっても、上記舵角を所望の値に変化させることが可能である。
【0013】
即ち、舵角可変手段とは、上記操舵入力手段から操舵輪(好適には、前輪)へ至る操舵入力の機械的伝達経路を担う通常の操舵機構とは本質的意味合いにおいて異なるものである。但し、物理構成上の観点から見れば、舵角可変手段の少なくとも一部は、この種の操舵機構と共用或いは共有されていてもよい。舵角可変手段は、好適な一形態としては、VGRS(Variable Gear Ratio Steering:ステアリングギア比可変装置)、SBW(Steering By Wire:電子制御舵角可変装置)又はARS(Active Rear Steering:後輪操舵装置)等の各種実践的態様を採り得る。
【0014】
舵角可変手段によれば、舵角の制御対象となる車輪(上記操舵入力手段と機械的に連結された操舵輪を含み得る)について、舵角が少なくとも一定の範囲で可変であるから、理論的には車両の進行方向をドライバの操舵入力とは無関係に変化させることが可能となる。
【0015】
制駆動力可変手段とは、前輪及び後輪における左右輪に制駆動力差を生じさせることが可能な手段であり、言い換えれば、各輪の制駆動力を各輪相互間で独立して制御することが可能な手段である。制駆動力可変手段は、好適な一形態として、例えば、駆動力分配デファレンシャル機構若しくはインホイールモータシステム等を含む駆動力可変装置、又はABS(Antilock Braking System)等を含む各種ECB(Electronic Controlled Braking system:電子制御制動装置)等の制動力可変装置、或いはその両方等の実践的態様を採り得る。
【0016】
制駆動力可変手段によれば、例えば内燃機関等の各種動力源から供給されるトルク(尚、トルクと駆動力とは一義的な関係を有し得る)は、その物理的、機械的又は電気的作用により所望の配分比率に従って左右輪に分配され、左右輪の駆動力の絶対値が増減制御された結果として左右駆動力差が生じ得る。或いは、例えば機関トルクとは独立した駆動力が左右輪に付与され、左右輪の駆動力の絶対値が増減制御された結果として左右駆動力差が生じ得る。
【0017】
一方、制駆動力可変手段が制動力可変装置である場合、左右輪に付与される、好適には摩擦制動力としての制動力を変化させることにより、付与される制動力の小さい側の車輪について、駆動力を相対的に高くすることと同等の効果を得るものである。即ち、制動力は、言わば負側の駆動力である。
【0018】
いずれにせよ左右輪で制駆動力差が生じると、車両は、駆動力の相対的に小さい車輪(即ち、制動力の相対的に大きい車輪である)の側(即ち、右側車輪の駆動力(制動力)が小さければ(大きければ)、右側である)へ旋回する。
【0019】
従って、制駆動力可変手段によれば、理論的には車両の進行方向をドライバの操舵入力とは無関係に変化させることが可能となる。
【0020】
本発明に係る車両の制御装置は、このような車両を制御する装置であって、例えば、一又は複数のCPU(Central Processing Unit)、MPU(Micro Processing Unit)、各種プロセッサ又は各種コントローラ、或いは更にROM(Read Only Memory)、RAM(Random Access Memory)、バッファメモリ又はフラッシュメモリ等の各種記憶手段等を適宜に含み得る、単体の或いは複数のECU(Electronic Controlled Unit)等の各種処理ユニット、各種コントローラ或いはマイコン装置等各種コンピュータシステム等の形態を採り得る。
【0021】
車量の運動状態制御、例えば、車両を目標走行路に追従させる或いは車両に目標走行路をトレースさせる等の制御が一種の自動操舵として行われる場合、通常、車両の進行方向の変化に応じて適宜ヨーレートが発生する。然るに、車両を目標運動状態に誘う一種の自動操舵において生じるヨーレートは、ドライバに操舵意思がないことに起因してドライバに違和感を与え易い。本発明に係る車両の制御装置は、そのような違和感を抑制した車両運動制御を可能としたものである。
【0022】
本発明に係る車両の制御装置によれば、第1設定手段により、車両の平行移動を実現するための、当該平行移動を規定する複数の第1状態量の目標値が設定される。
【0023】
本発明に係る「車両の平行移動」とは、ヨーレートが所定の不感帯相当値に抑制された状態での横方向移動として規定される。ここで、「不感帯相当値」とは、ドライバが、実質的にヨーレートが発生していない或いはヨーレートが気にならない旨の認識を抱き得る程度に低い値を包括する概念であって、好適な一形態としてはゼロ値又はゼロ相当値(ゼロと扱って実践上問題ない程度にゼロ近傍の値)を意味する。但し、例えば予め実験的に、経験的に、理論的に又は人間工学的見地に立ったシミュレーション等に基づいて、この種の不感帯相当値の上限を規定する明確な基準値が設定される場合には、不感帯相当値とは、そのような基準値未満の範囲内で規定される値であってもよい。いずれにせよ、「不感帯相当値」なる表現が、本発明の明確性を損なうことはない。
【0024】
平行移動がこのように定義される点に鑑みれば、目標車両運動としての平行移動を規定する第1状態量は、ヨーレートに対応する第1状態量と、横方向移動に対応する第1状態量の少なくとも二種類必要である。このような第1状態量は必ずしも一義的でないが、第1状態量は、好適な一形態として、ヨーレート及び車体スリップ角(車両の旋回接線方向に対する角度であり、車体の向きと車体の瞬間的な進行方向とのなす角度である)であってもよい。
【0025】
第1設定手段は、例えば、目標走行路に沿って車両を走行させるための参照値となり得る物理量としての位置状態偏差(即ち、維持すべき目標走行路と車両との相対的位置関係を規定する偏差であり、好適な一形態として、目標走行路に対する車両の横位置の偏差やヨー角偏差等を含み得る)に基づいて、或いは更に車速等の走行条件を参照して、これら第1状態量うち横方向移動に対応する第1状態量の目標値を設定する。この場合、第1状態量の目標値は、予め然るべき記憶手段に各種のパラメータ値と対応付けられる形でマップ化されて格納されていてもよいし、その都度然るべき演算アルゴリズムや演算式等に従って導かれてもよい。
【0026】
尚、第1状態量のうちヨーレートに対応する第1状態量は、不感帯相当値が固定値であれば、その都度設定される必要はなく、予め後述する車両運動モデルの一部として組み込まれていてもよい。即ち、この場合、厳密な意味で設定される第1状態量の目標値は、横方向移動に対応する第1状態量のみであってもよい。但し、このような場合についても、ヨーレートに対応する第1状態量が設定されている点に変わりはなく、いずれにせよ、本発明に係る第1設定手段の範疇であることは言うまでもない。
【0027】
一方、公知の運動方程式によれば、車両運動に複数の自由度を与えるには、可制御要素の数が、得ようとする自由度の数と同数必要となる。平行移動は、上述したように二自由度の運動制御であるから、可制御要素が複数あれば、これらの間に数値的な相対関係を規定することができる。本発明では、前輪又は後輪の舵角に相関する第2状態量及び左右制駆動力差に相関する第2状態量が、この可制御要素に相当しており、予めこれら可制御要素と上記第1状態量の各々との相対関係を規定するものとしての車両運動モデルが構築されている。本発明に係る第2設定手段は、この車両運動モデルに基づいて、平行移動を実現するための複数の第2状態量の目標値を設定するのである。
【0028】
従って、本発明によれば、この設定された複数の第2状態量の目標値に基づいて舵角可変手段及び制駆動力可変手段が制御された場合に、目標運動状態(即ち、ヨーレートが抑制された横方向移動としての平行移動)を実現することができるのである。
【0029】
尚、舵角に相関する第2状態量とは、無論舵角そのものを含み得る。同様に、左右制駆動力差に相関する第2状態量とは、無論左右制駆動力差そのものを含み得る。また、車両運動モデルは、概念的にはこのように規定されるものの、モデル内部に包含される各種要素値は多義的であってよい。
【0030】
本発明に係る車両の制御装置の一の態様では、前記第2状態量の各々が前記設定された目標値となるように前記舵角可変手段及び前記制駆動力可変手段を制御する制御手段を更に具備する。
【0031】
この態様によれば、制御手段により一種の自動操舵制御が実行され、第2状態量の各々が夫々設定された目標値となるように舵角可変手段及び制駆動力可変手段が制御される。従って、車両の平行移動が好適に実現される。
【0032】
尚、第2状態量は、夫々舵角及び制駆動力差に相関するから、第2状態量の目標値から目標舵角及び目標制駆動力差を決定することができる。この際、目標制駆動力差に対応する各輪の目標制駆動力は一義的ではないから、制御手段は、複数の候補値の中から、その時点の車両の走行条件やドライバ意思等に適した最適な解を目標制駆動力として設定してもよい。
【0033】
本発明に係る車両の制御装置の他の態様では、前記第1状態量は、前記車両のヨーレート相当値及び前記車両の車体スリップ角相当値である。
【0034】
平行移動の定義に鑑みれば、第1状態量としてヨーレート及び車体スリップ角は適当であり、これらを第1状態量とすることによって、高精度な平行移動が可能となる。
【0035】
本発明に係る車両の制御装置の他の態様では、前記第2状態量は、前記舵角及び前記車両の重心点周りのモーメントである。
【0036】
車両の重心点回りのモーメントは、各輪の制駆動力差によって生成することができる。従って、車両運動モデルを、この重心点回りのモーメントと前輪又は後輪の舵角とを第2状態量として構築することによって、車両の平行移動が好適に実現される。
【0037】
本発明に係る車両の制御装置の他の態様では、前記不感帯相当値は、少なくともゼロ値を含み且つ基準値以下の値である。
【0038】
この態様によれば、ヨーレートがゼロ値又はゼロ相当値といった比較的狭帯域で設定される場合と較べて、目標舵角及び目標制駆動力の採り得る範囲が拡大される。従って、目標舵角及び目標制駆動力をより最適化することが可能となり、実践上有益である。
【0039】
本発明に係る車両の制御装置の他の態様では、前記車両運動モデルは、前記車両の物理構成に応じて定まる時定数要素を含む。
【0040】
この態様によれば、車両運動モデルは時定数要素(周波数応答値)を含むため、例えば、横方向或いは旋回方向の位置変化が大きい場合であっても、車両の運動を精度良く制御することが可能となる。
【0041】
尚、時定数要素が車両運動モデルに基づいた第2状態量の目標値決定プロセスに与える影響は、車両の挙動変化が大きい程大きくなるが、反対に、車両の挙動変化が定常変化に留まるような定常的走行状態においては、これら時定数要素が第2状態量の目標値に与える影響は無視出来る程に小さくなる場合もある。
【0042】
従って、この態様における好適な一形態として、車両が定常状態にある場合には、時定数要素が無視されてもよい。この場合、演算負荷が軽減されて好適である。
【0043】
尚、車両が定常走行状態にあるか否かは、例えば、第1状態量(即ち、例えば、ヨーレート、車体スリップ角或いは横方向加速度等)の目標値の変化速度等に基づいてなされ得る。例えば、車体スリップ角やヨーレートの目標値が小さい場合、即ち、横加速度の変化が小さい場合や旋回運動が緩慢である場合等には、定常走行状態である旨の判断を下し得る。
【0044】
本発明に係る車両の制御装置の他の態様では、前記車両の車輪に発生する前後力、横力及び上下力のうち少なくとも一つを含む第1補正要素を特定する第1補正要素特定手段と、該特定された第1補正要素に基づいて前記車両運動モデルを補正する第1補正手段とを更に具備する。
【0045】
この態様によれば、車輪(実践的態様としてタイヤを好適に含む)に作用する前後力、横力及び上下力のうち少なくとも一つを含む第1補正要素に基づいて車両運動モデルが補正される。従って、車輪が上述の各種力を既に発生している状況においても、正確に第2状態量の目標値を決定することができ、車両を平行移動させることが可能となる。
【0046】
尚、第1補正要素特定手段に係る「特定」とは、検出、算出、推定、同定、選択又は取得等を広範な実践的態様を包括する概念である。
【0047】
本発明に係る車両の制御装置の他の態様では、前記車両に発生する前後方向加速度、横方向加速度及びロール剛性配分のうち少なくとも一つを含む第2補正要素を特定する第2補正要素特定手段と、該特定された第2補正要素に基づいて前記車両運動モデルを補正する第2補正手段とを更に具備する。
【0048】
この態様によれば、車両に前後方向加速度、横方向加速度及びロール剛性配分のうち少なくとも一つを含む第2補正要素に基づいて車両運動モデルが補正される。従って、車両が加減速、旋回或いはロール等による各種限界挙動付近で走行している状況においても、正確に第2状態量の目標値を決定することができ、車両を平行移動させることが可能となる。
【0049】
尚、第2補正要素特定手段に係る「特定」とは、検出、算出、推定、同定、選択又は取得等を広範な実践的態様を包括する概念である。
【0050】
本発明のこのような作用及び他の利得は次に説明する実施形態から明らかにされる。
【図面の簡単な説明】
【0051】
【図1】本発明の一実施形態に係る車両の構成を概念的に表してなる概略構成図である。
【図2】図1の車両においてなされるLKA制御のフローチャートである。
【発明を実施するための形態】
【0052】
以下、適宜図面を参照して本発明の車両の制御装置に係る実施形態について説明する。
<発明の実施形態>
<実施形態の構成>
始めに、図1を参照して、本発明の一実施形態に係る車両10の構成について説明する。ここに、図1は、車両10の基本的な構成を概念的に表してなる概略構成図である。
【0053】
図1において、車両10は、左前輪FL、右前輪FR、左後輪RL及び右後輪RRの各車輪を備え、このうち操舵輪である左前輪FL及び右前輪FRの舵角変化によって所望の方向に進行することが可能な構成となっている。
【0054】
車両10は、ECU100、エンジン200、駆動力分配装置300、VGRSアクチュエータ400、EPSアクチュエータ500、ECB(Electronic Controlled Braking system:電子制御式制動装置)600及びカーナビゲーション装置700を備える。
【0055】
ECU100は、夫々不図示のCPU(Central Processing Unit)、ROM(Read Only Memory)及びRAM(Random Access Memory)を備え、車両10の動作全体を制御可能に構成された電子制御ユニットであり、本発明に係る「車両の制御装置」の一例である。ECU100は、ROMに格納された制御プログラムに従って、後述するLKA制御を実行可能に構成されている。
【0056】
尚、ECU100は、本発明に係る「第1設定手段」、「第2設定手段」、「制御手段」、「第1補正要素特定手段」、「第1補正手段」、「第2補正要素特定手段」及び「第2補正手段」の夫々一例として機能するように構成された一体の電子制御ユニットであり、これら各手段に係る動作は、全てECU100によって実行されるように構成されている。但し、本発明に係るこれら各手段の物理的、機械的及び電気的な構成はこれに限定されるものではなく、例えばこれら各手段は、複数のECU、各種処理ユニット、各種コントローラ或いはマイコン装置等各種コンピュータシステム等として構成されていてもよい。
【0057】
エンジン200は、車両10の駆動力源として機能するV型6気筒ガソリンエンジンである。尚、本発明に係る車両の動力源は、燃料の燃焼を機械的動力に変換して取り出し得る機関を包括する概念として各種実践的態様を有する内燃機関(エンジン200もその一例である)に限定されず、モータ等の回転電機であってもよい。或いは、車両は、これらが協調制御される所謂ハイブリッド車両であってもよい。エンジン200の駆動力出力軸たるクランク軸は、駆動力分配装置の一構成要素たるセンターデファレンシャル装置310に接続されている。尚、エンジン200の詳細な構成は、本発明の要旨との相関が薄いため、ここではその詳細を割愛する。
【0058】
駆動力分配装置300は、エンジン200から前述のクランク軸を介して伝達されるエンジントルクTeを、前輪及び後輪に所定の比率で分配可能に構成されると共に、更に前輪及び後輪の各々において左右輪の駆動力配分を変化させることが可能に構成された、本発明に係る「制駆動力可変手段」の一例である。駆動力分配装置300は、センターデファレンシャル装置310(以下、適宜「センターデフ310」と略称する)、フロントデファレンシャル装置320(以下、適宜「フロントデフ320」と略称する)及びリアデファレンシャル装置330(以下、適宜「リアデフ330」と略称する)を備える。
【0059】
センターデフ310は、エンジン200から供給されるエンジントルクTeを、フロントデフ320及びリアデフ330に分配するLSD(Limited Slip Differential:差動制限機能付き差動機構)である。センターデフ310は、前後輪に作用する負荷が略一定な条件下では、前後輪に対し分配比50:50(一例であり限定されない)でエンジントルクTeを分配する。また、前後輪のうち一方の回転速度が他方に対し所定以上高くなると、当該一方に対し差動制限トルクが作用し、当該他方へトルクが移譲される差動制限が行われる構成となっている。即ち、センターデフ310は、所謂回転速度感応式(ビスカスカップリング式)の差動機構である。
【0060】
尚、センターデフ310は、このような回転速度感応式に限らず、入力トルクに比例して差動制限作用が大きくなるトルク感応式の差動機構であってもよい。また、遊星歯車機構により差動作用をなし、電磁クラッチの断続制御により差動制限トルクを連続的に変化させ、所定の調整範囲内で所望の分配比率を実現可能な分配比率可変型の差動機構であってもよい。いずれにせよ、センターデフ310は、前輪及び後輪に対しエンジントルクTeを分配可能な限り、公知非公知を問わず各種の実践的態様を採ってよい。
【0061】
フロントデフ320は、センターデフ310によりフロントアクスル(前輪車軸)側に分配されたエンジントルクTeを、更に、左右輪に所定の調整範囲内で設定される所望の分配比率で分配可能な分配比率可変型のLSDである。フロントデフ320は、リングギア、サンギア及びピニオンキャリアからなる遊星歯車機構と、差動制限トルクを与える電磁クラッチを備え、この遊星歯車機構のリングギアにデフケースが、サンギア及びキャリアに夫々左右の車軸が連結された構成を採る。また、差動制限トルクは、電磁クラッチに対する通電制御により連続的に制御され、フロントデフ320の物理的電気的構成上定まる所定の調整範囲内で、トルクの分配比率が連続的に可変に制御される構成となっている。
【0062】
フロントデフ320は、ECU100と電気的に接続されており、電磁クラッチへの通電制御もECU100により制御される構成となっている。従って、ECU100は、フロントデフ320の駆動制御を介して、所望の前輪制駆動力差(ここでは、駆動力差である)Ffを生じさせることが可能である。尚、フロントデフ320の構成は、左右輪に所望の分配比率で駆動力(尚、トルクと駆動力とは一義的な関係にある)を分配可能な限りにおいて、ここに例示されるものに限定されず、公知非公知を問わず各種の態様を有し得る。いずれにせよ、このような左右駆動力配分作用は公知であり、ここでは、説明の煩雑化を防ぐ目的からここではその詳細については触れないこととする。
【0063】
リアデフ330は、センターデフ310によりプロペラシャフト11を介してリアアクスル(後輪車軸)側に分配されたエンジントルクTeを、更に、左右輪に所定の調整範囲内で設定される所望の分配比率で分配可能な分配比率可変型のLSDである。リアデフ330は、リングギア、サンギア及びピニオンキャリアからなる遊星歯車機構と、差動制限トルクを与える電磁クラッチを備え、この遊星歯車機構のリングギアにデフケースが、サンギア及びキャリアに夫々左右の車軸が連結された構成を採る。また、差動制限トルクは、電磁クラッチに対する通電制御により連続的に制御され、リアデフ330の物理的電気的構成上定まる所定の調整範囲内で、トルクの分配比率が連続的に可変に制御される構成となっている。
【0064】
リアデフ330は、ECU100と電気的に接続されており、電磁クラッチへの通電制御もECU100により制御される構成となっている。従って、ECU100は、リアデフ330の駆動制御を介して、所望の後輪制駆動力差(ここでは、駆動力差である)Frを生じさせることが可能である。尚、リアデフ330の構成は、左右輪に所望の分配比率で駆動力(尚、トルクと駆動力とは一義的な関係にある)を分配可能な限りにおいて、ここに例示されるものに限定されず、公知非公知を問わず各種の態様を有し得る。いずれにせよ、このような左右駆動力配分作用は公知であり、ここでは、説明の煩雑化を防ぐ目的からここではその詳細については触れないこととする。
【0065】
VGRSアクチュエータ400は、ハウジング、VGRSモータ、減速機構及びロック機構(いずれも不図示)等を備えた操舵伝達比可変装置であり、本発明に係る「舵角可変手段」の一例である。
【0066】
VGRSアクチュエータ400において、VGRSモータ、減速機構及びロック機構は、ハウジングに収容されている。このハウジングは、操舵入力手段としてのステアリングホイル12に連結されたアッパーステアリングシャフト13の下流側の端部と固定されており、アッパーステアリングシャフト13と略一体に回転可能に構成されている。
【0067】
VGRSモータは、回転子たるロータ、固定子たるステータ及び駆動力の出力軸たる回転軸を有するDCブラシレスモータである。ステータは、ハウジング内部に固定されており、ロータは、ハウジング内部で回転可能に保持されている。回転軸は、ロータと同軸回転可能に固定されており、その下流側の端部が減速機構に連結されている。このステータには、不図示の電気駆動回路から駆動電圧が供給される構成となっている。
【0068】
減速機構は、差動回転可能な複数の回転要素を有する遊星歯車機構である。この複数の回転要素の一回転要素は、VGRSモータの回転軸に連結されており、また、他の回転要素の一は、前述のハウジングに連結されている。そして残余の回転要素が、ロアステアリングシャフト14に連結されている。
【0069】
このような構成を有する減速機構によれば、ステアリングホイル12の操作量に応じたアッパーステアリングシャフト13の回転速度(即ち、ハウジングの回転速度)と、VGRSモータの回転速度(即ち、回転軸の回転速度)とにより、残余の一回転要素に連結されたロアステアリングシャフト14の回転速度が一義的に決定される。この際、回転要素相互間の差動作用により、VGRSモータの回転速度を増減制御することによって、ロアステアリングシャフト14の回転速度を増減制御することが可能となる。即ち、VGRSモータ及び減速機構の作用により、アッパーステアリングシャフト13とロアステアリングシャフト14とは相対回転可能である。尚、減速機構における各回転要素の構成上、VGRSモータの回転速度は、各回転要素相互間のギア比に応じて定まる所定の減速比に従って減速された状態でロアステアリングシャフト14に伝達される。
【0070】
このように、車両10では、アッパーステアリングシャフト13とロアステアリングシャフト14とが相対回転可能であることによって、アッパーステアリングシャフト13の回転量たる操舵角MAと、ロアステアリングシャフト14の回転量に応じて一義的に定まる(後述するラックアンドピニオン機構のギア比も関係する)操舵輪たる前輪の舵角δfとの比たる操舵伝達比が、予め定められた範囲で連続的に可変となる。
【0071】
尚、ロック機構は、VGRSモータ側のクラッチ要素とハウジング側のクラッチ要素とを備えたクラッチ機構である。両クラッチ要素が相互に係合した状態においては、アッパーステアリングシャフト13とVGRSモータの回転軸との回転速度が一致するため、必然的にロアステアリングシャフト14との回転速度もこれらと一致する。即ち、アッパーステアリングシャフト13とロアステアリングシャフト14とが直結状態となる。但し、ロック機構の詳細については、本発明との相関が薄いためここでは割愛する。
【0072】
尚、VGRSアクチュエータ400は、ECU100と電気的に接続されており、その動作はECU100により制御される構成となっている。
【0073】
車両10において、ロアステアリングシャフト14の回転は、ラックアンドピニオン機構に伝達される。ラックアンドピニオン機構は、ロアステアリングシャフト14の下流側端部に接続された不図示のピニオンギア及び当該ピニオンギアのギア歯と噛合するギア歯が形成されたラックバー15を含む操舵伝達機構であり、ピニオンギアの回転がラックバー15の図中左右方向の運動に変換されることにより、ラックバー15の両端部に連結されたタイロッド及びナックル(符号省略)を介して操舵力が各操舵輪に伝達される構成となっている。即ち、ステアリングホイル12から各前輪に至る操舵力の伝達機構は、本発明に係る「操舵装置」の一例である。
【0074】
EPSアクチュエータ500は、永久磁石が付設されてなる回転子たる不図示のロータと、当該ロータを取り囲む固定子であるステータとを含むDCブラシレスモータとしてのEPSモータを備えた操舵トルク補助装置である。このEPSモータは、不図示の電気駆動装置を介した当該ステータへの通電によりEPSモータ内に形成される回転磁界の作用によってロータが回転することにより、その回転方向にアシストトルクTAを発生可能に構成されている。
【0075】
一方、EPSモータの回転軸たるモータ軸には、不図示の減速ギアが固定されており、この減速ギアはまた、ロアステアリングシャフト14に設けられた減速ギアと噛合している。このため、本実施形態において、EPSモータから発せられるアシストトルクTAは、ロアステアリングシャフト14の回転をアシストするトルクとして機能する。このため、アシストトルクTAが、ステアリングホイル12を介してアッパーステアリングシャフト13に与えられるドライバ操舵トルクMTと同一方向に付与された場合には、ドライバの操舵負担は、アシストトルクTAの分だけ軽減される。
【0076】
尚、EPSアクチュエータ500は、ECU100と電気的に接続されており、その動作はECU100により制御される構成となっている。
【0077】
車両10には、操舵角センサ16及び操舵トルクセンサ17が備わる。
【0078】
操舵角センサ16は、アッパーステアリングシャフト13の回転量を表す操舵角MAを検出可能に構成された角度センサである。操舵角センサ16は、ECU100と電気的に接続されており、検出された操舵角MAは、ECU100により一定又は不定の周期で参照される構成となっている。
【0079】
操舵トルクセンサ17は、ドライバからステアリングホイル12を介して与えられるドライバ操舵トルクMTを検出可能に構成されたセンサである。より具体的に説明すると、アッパーステアリングシャフト13は、上流部と下流部とに分割されており、図示せぬトーションバーにより相互に連結された構成を有している。係るトーションバーの上流側及び下流側の両端部には、回転位相差検出用のリングが固定されている。このトーションバーは、車両10のドライバがステアリングホイル12を操作した際にアッパーステアリングシャフト13の上流部を介して伝達される操舵トルク(即ち、ドライバ操舵トルクMT)に応じてその回転方向に捩れる構成となっており、係る捩れを生じさせつつ下流部に操舵トルクを伝達可能に構成されている。従って、操舵トルクの伝達に際して、先に述べた回転位相差検出用のリング相互間には回転位相差が発生する。操舵トルクセンサ17は、係る回転位相差を検出すると共に、係る回転位相差を操舵トルクに換算してドライバ操舵トルクMTに対応する電気信号として出力可能に構成されている。操舵トルクセンサ17は、ECU100と電気的に接続されており、検出されたドライバ操舵トルクMTは、ECU100により一定又は不定の周期で参照される構成となっている。
【0080】
ECB600は、車両10の前後左右各輪に個別に制動力を付与可能に構成された、本発明に係る「制駆動力可変手段」の他の一例たる電子制御式制動装置である。ECB600は、ブレーキアクチュエータ610並びに左前輪FL、右前輪FR、左後輪RL及び右後輪RRに夫々対応する制動装置620FL、620FR、620RL及び620RRを備える。
【0081】
ブレーキアクチュエータ610は、制動装置620FL、620FR、620RL及び620RRに対し、夫々個別に作動油を供給可能に構成された油圧制御用のアクチュエータである。ブレーキアクチュエータ610は、マスタシリンダ、電動オイルポンプ、複数の油圧伝達通路及び当該油圧伝達通路の各々に設置された電磁弁等から構成されており、電磁弁の開閉状態を制御することにより、各制動装置に備わるホイルシリンダに供給される作動油の油圧を制動装置各々について個別に制御可能に構成されている。作動油の油圧は、各制動装置に備わるブレーキパッドの押圧力と一対一の関係にあり、作動油の油圧の高低が、各制動装置における制動力の大小に夫々対応する構成となっている。
【0082】
ブレーキアクチュエータ610は、ECU100と電気的に接続されており、各制動装置から各車輪に付与される制動力は、ECU100により制御される構成となっている。
【0083】
車両10は、車載カメラ18及び車速センサ19を備える。
【0084】
車載カメラ18は、車両10のフロントノーズに設置され、車両10の前方における所定領域を撮像可能に構成された撮像装置である。車載カメラ18は、ECU100と電気的に接続されており、撮像された前方領域は、画像データとしてECU100に一定又は不定の周期で送出される構成となっている。ECU100は、この画像データを解析し、後述するLKA制御に必要な各種データを取得可能である。
【0085】
車速センサ19は、車両10の速度たる車速Vを検出可能に構成されたセンサである。車速センサ19は、ECU100と電気的に接続されており、検出された車速Vは、ECU100により一定又は不定の周期で参照される構成となっている。
【0086】
カーナビゲーション装置700は、車両10に設置されたGPSアンテナ及びVICSアンテナを介して取得される信号に基づいて、車両10の位置情報、車両10の周辺の道路情報(道路種別、道路幅、車線数、制限速度及び道路形状等)、信号機情報、車両10の周囲に設置された各種施設の情報、渋滞情報及び環境情報等を含む各種ナビゲーション情報を提供可能な装置である。カーナビゲーション装置700は、ECU100と電気的に接続されており、ECU100によりその動作状態が制御される構成となっている。
【0087】
<実施形態の動作>
<LKA制御の詳細>
以下、図2を参照し、本実施形態の動作として、ECU100により実行されるLKA制御の詳細について説明する。ここに、図2は、LKA制御のフローチャートである。尚、LKA(Lane Keeping Assist)制御は、車両10を目標走行路(本実施形態では、即ち車線(レーン)である)に追従させる制御であり、車両10において実行される走行支援制御の一つである。
【0088】
図2において、ECU100は、車両10に備わる各種スイッチ類の操作信号、各種フラグ及び上記各種センサに係るセンサ信号等を含む各種信号を読み込む(ステップS101)と共に、予め車両10の車室内に設置されたLKAモード発動用の操作ボタンがドライバにより操作される等した結果としてLKAモードが選択されているか否かを判別する(ステップS102)。LKAモードが選択されていない場合(ステップS102:NO)、ECU100は、処理をステップS101に戻す。
【0089】
LKAモードが選択されている場合(ステップS102:YES)、ECU100は、車載カメラ18から送出される画像データに基づいて、LKAの目標走行路を規定する白線(白色である必要はない)が検出されているか否かを判別する(ステップS103)。
【0090】
白線が検出されていない場合(ステップS103:NO)、仮想の目標走行路を設定することができないため、ECU100は、処理をステップS101に戻す。一方、白線が検出されている場合(ステップS103:YES)、ECU100は、車両10を目標走行路に追従させるに際して必要となる各種路面情報を算出する(ステップS104)。
【0091】
ステップS104においては、公知の手法に基づいて、白線と車両10との横方向の偏差たる横方向偏差Y及び白線と車両10とのヨー角偏差φが算出される。
【0092】
これら各種路面情報が算出されると、ECU100は、車両10を目標走行路へ追従させるために必要となる目標車両状態量として、車体スリップ角βの目標値たる目標車体スリップ角βtgとヨーレートγの目標値たる目標ヨーレートγtgを設定する(ステップS105)。尚、これら目標車両状態量は、本発明に係る「第1状態量」の一例である。また、ステップS105は、本発明に係る「第1設定手段」の動作の一例である。
【0093】
尚、本実施形態において、目標ヨーレートγtgはゼロ値であり固定値である。従って、ステップS105が訪れる毎にECU100が目標ヨーレートγtgを設定する必要はなく、目標ヨーレートγtgは、後述するように車両運動モデルの一部に組み込まれていてもよい。
【0094】
一方、目標車体スリップ角βtgは、予めROM等の然るべき記憶手段に、上記横方向偏差Y及びヨー角偏差φに対応付けられる形でマップ化されて格納されており、ECU100は、ステップS104において算出された各路面情報に応じて適宜該当する値を選択することにより目標車体スリップ角βtgを設定する。
【0095】
目標車両状態量が設定されると、処理は二系統に分岐する。即ち、一方の系統は、VGRSアクチュエータ400による舵角制御であり、他方の系統は、駆動力分配装置300及びECB600による各輪の制駆動力制御である。
【0096】
始めに、制駆動力制御について説明する。
【0097】
制駆動力制御においては、先ず、車両運動モデルが調整される(ステップS106)。ここで、「車両運動モデル」とは、ヨーレートγ及び車体スリップ角βからなる車両状態量(第1状態量)と、前輪舵角δf及び重心回りモーメントMo(これらは、本発明に係る「第2状態量」の一例である)との相対関係を規定するシミュレーションモデルであり、数値要素が予めROMに格納されている。尚、車両運動モデル及びステップS106に係るその調整については後述する。
【0098】
車両運動モデルの調整が終了すると、ECU100は、平行移動用目標前輪舵角δftg2を算出する(ステップS107)。平行移動用目標前輪舵角δftg2とは、車両10が目標走行路をトレースするにあたる前輪舵角であり、これも車両運動モデルから算出される。平行移動用目標前輪舵角δftg2の設定についても後述する。
【0099】
平行移動用目標前輪舵角δftg2が算出されると、ECU100は、目標重心回りモーメントMotgを算出する(ステップS108)。目標重心回りモーメントMotgの設定についても後述する。尚、ステップS107及びS108は、本発明に係る「第2設定手段」の動作の一例である。
【0100】
目標重心回りモーメントMotgが算出されると、ECU100は、各輪の目標制駆動力を設定し(ステップS109)、設定された目標制駆動力に従って、駆動力分配装置300及びECB600を適宜制御する(ステップS110)。ステップS110が終了すると、処理はステップS101に戻される。制駆動力制御はこのように実行される。
【0101】
尚、目標重心回りモーメントMotgと前輪左右駆動力差Ff及び後輪左右駆動力差Frとの関係は、公知であり且つ明確な数値関係として規定することができる。従って、ECU100は、目標重心回りモーメントMotgに基づいて、前輪左右制駆動力差Ff及び後輪左右制駆動力差Frの目標値を一義に決定することができる。
【0102】
一方、前輪左右制駆動力差Ff及び後輪左右制駆動力差Frは、夫々駆動力によって実現しても制動力によって実現してもよいから、これらの目標値を実現するための各輪の目標制駆動力の設定態様は、実践上必ずしも一義的でないが、目標制駆動力差が得られる限りにおいて、車両10の目標運動としての平行移動は担保される。
【0103】
次に、舵角制御について説明する。
【0104】
舵角制御では、先ず基本目標前輪舵角δftg1が算出される(ステップS111)。基本目標前輪舵角δftg1とは、ドライバが自身の意思で行う操舵操作に対し付与すべき前輪舵角であり、通常の操舵制御の範疇に属する舵角である。基本目標前輪舵角δftg1は、ドライバがステアリングホイル12を保舵するのみ、或いはステアリングホイル12から手を放している場合、ゼロである。
【0105】
基本目標前輪舵角δftg1が算出されると、ECU100は、ステップS107において算出された平行移動用目標前輪舵角δftg2を取得し、前輪舵角δfの目標値たる目標前輪舵角δftgを算出する(ステップS112)。尚、この際、δftg=δftg1+δftg2なる関係が成立する。
【0106】
目標前輪舵角δftgが算出されると、ECU100は、前輪舵角δfがこの算出された目標前輪舵角δftgとなるように、VGRSアクチュエータ400を制御する(ステップS113)。前輪舵角δfの制御が開始されると、処理はステップS101に戻され、一連の処理が繰り返される。LKA制御は以上のように実行される。
【0107】
尚、ステップS110及びS113は、本発明に係る「制御手段」の動作の一例である。
<車両運動モデルに基づいた状態量制御の詳細>
ここで、車両運動モデルの詳細について説明する。
【0108】
車両運動モデルは、下記(1)に如くに規定される。尚、(1)式は、便宜上、本発明に係る「第2状態量」として、前輪舵角δf及び重心回りモーメントMoに加えて、後輪舵角δrまで考慮された式である。本実施形態に係る車両10には後輪操舵機能は付帯していないから、後輪舵角δrは可制御要素とはならず、第2状態量とはなり得ないが、概念的には、前輪舵角δf及び重心回りモーメントMoと同様に、第2状態量の一例として機能し得る。即ち、車両10にARS等の後輪操舵装置が備わる場合には、前輪舵角δfに代えて後輪舵角δrを第2状態量とすることも可能である。従って、これ以降、適宜後輪舵角δrも考慮した式展開を記載することとする。
【0109】
【数1】
ここで、(1)式におけるΔ(s)並びに係数A11、A12、A13、A21、A22、A23、A31、A32及びA33は、夫々、下記(2)乃至(8)の如くに規定される。
【0110】
【数2】
【0111】
【数3】
【0112】
【数4】
【0113】
【数5】
【0114】
【数6】
【0115】
【数7】
【0116】
【数8】
尚、上記各式における各参照記号の表す意味は以下の通りである。
【0117】
M・・・車両重量
V・・・車速
lf・・・車両重心-フロント車軸距離
lr・・・車両重心-リア車軸距離
l・・・lf+lr(=ホイールベース)
Kf・・・前輪コーナリングパワー
Kr・・・後輪コーナリングパワー
s・・・ラプラス演算子
ここで、本実施形態では、目標ヨーレートγtg=0であるから、下記(9)式及び(10)式が成立する。尚、(9)式は、重心回りモーメントMoと前輪舵角との関係を表す関係式であり、(10)式は、重心回りモーメントMoと後輪舵角との関係を表す関係式である。
【0118】
【数9】
【0119】
【数10】
最終的に、下記の通り、(9)式に対応する(11)式及び(10)式に対応する(12)式を得る。
【0120】
【数11】
【0121】
【数12】
上記(11)式及び(12)式におけるG、τ1、τ2、τ3及びτ4は、夫々車両10の物理構成及び走行条件に応じて一義に定まる値である。従って、ECU100は、図2のステップS108において、上記(11)式を使用し、目標重心回りモーメントMotgを平行移動用目標前輪舵角δftg2に基づいて決定することができる。
【0122】
一方、上記(1)式を車体スリップ角βについて解くと、下記(13)式が得られる。
【0123】
【数13】
ここで、β=βtgとし且つMoとして上記(11)式を代入することにより、目標車体スリップ角βtgと前輪舵角δfとの関係式を構築することができる。ECU100は、図2のステップS107において、係る関係式を利用することにより、平行移動用目標前輪舵角δftg2を決定することができる。
【0124】
このようにして、車両10を平行移動させるための第2状態量としての、平行移動用目標前輪舵角δftg2及び目標重心回りモーメントMotgが決定されるのである。従って、図2のステップS110及びS113において、これらを実現するための制駆動力制御及び舵角制御が実行された場合に、車両10は、ヨーレートが抑制された横方向移動、即ち平行移動を行うことができるのである。
【0125】
尚、ARS等の後輪操舵装置が備わる場合についても、上記(12)式を利用することにより同様にしてこれら第2状態量を決定することができる。
【0126】
次に、図2のステップS106における車両運動モデルの調整について説明する。尚、ドライバ操舵から独立して舵角制御を行い得る操舵デバイスとして、本実施形態ではVGRSアクチュエータ400が採用されており、第2状態量は即ち前輪舵角δfである。従って、これ以降は、後輪舵角δrが使用される場合の詳細については説明しない。但し、後輪舵角δrを第2状態量として使用する場合の制御が、基本的に前輪舵角δfと同様であることは、上記(11)式及び(12)式の相互関係からみて明白であろう。
【0127】
上記(9)式を使用すると、下記(14)式におけるG、τ1及びτ2は、夫々下記(14)乃至(16)式として表すことができる。
【0128】
【数14】
【0129】
【数15】
【0130】
【数16】
このように、重心回りモーメントMoと前輪舵角δfとの関係性(これもまた、本発明に係る「車両運動モデル」の一例である)を与えるG、τ1及びτ2は、車速Vに応じて変化する、夫々本発明に係る「時定数要素」の一例である。車両運動モデルには、このように車両10の動的要素が含まれており、車両10の実挙動を正確に反映することが可能となっている。
【0131】
ここで、車両10の多様な実挙動にロバストな平行移動を実現する観点からは、上記係数a1、a2及びa3は、その時点における車両運動に応じて可変であるのが望ましい。そこで、図2のステップS106において、ECU100は、(ア)前後輪のタイヤと路面との摩擦係数、(イ)前後輪のタイヤに発生している前後力、横力及び上下力、(ウ)車両10に発生している前後加速度並びに(エ)車両10に発生する横加速度及びロール剛性配分の夫々の補正要素に基づいて、上記係数a1、a2及びa3を調整する。
【0132】
より具体的には、補正対象は、(ア)の場合kf及びkrであり、(イ)の場合Kf及びKrであり、(ウ)の場合lf及びlrであり、(エ)の場合kf及びkrである。車両10の動的特性を規定する場合、車両10と路面との唯一の接地部分であるタイヤの状態は重要であり、(ア)、(イ)及び(エ)に応じて前後輪のコーナリングパワーが補正される。また、(ウ)の補正要素は、車両10の重心位置を過渡的に変化させるため、重心と車軸との距離に影響を与えるのである。
【0133】
各補正要素の値と補正後のKf、Kr、lf及びlrの値は、予めマップ化されてROMに格納されている。また、各補正要素の値は、公知の各種態様に従って特定することができるものであり、ここではその詳細については触れないこととする。尚、これら補正要素値の特定に際して適宜必要となるデバイスは、適宜車両10に備わっているものとする。
【0134】
尚、車両10の動的特性が無視できる定常的な走行状態においては、上記(11)式は結局「Mo=-Gδf」となり、車両重心モーメントMoは、前輪舵角δfとGのみの関数として扱うことができる。ECU100は、このような関係が成立し得る走行条件において、適宜この簡略的関係に従って目標重心回りモーメントMotg及び平行移動用目標前輪舵角δftg2を算出する。このため、平行移動に関する挙動制御の精度を低下させることなく演算負荷を軽減することができる。
【0135】
本発明は、上述した実施例に限られるものではなく、請求の範囲及び明細書全体から読み取れる発明の要旨或いは思想に反しない範囲で適宜変更可能であり、そのような変更を伴う車両の制御装置もまた本発明の技術的範囲に含まれるものである。
【産業上の利用可能性】
【0136】
本発明は、例えば、車両を目標走行路に追従させる機能を有する車両に利用可能である。
【符号の説明】
【0137】
FL、FR、RL、RR…車輪、10…車両、11…プロペラシャフト、12…ステアリングホイル、13…アッパーステアリングシャフト、14…ロアステアリングシャフト、15…ラックバー、16…操舵角センサ、17…操舵トルクセンサ、100…ECU、200…エンジン、300…制駆動力分配装置、310…センターデファレンシャル機構、320…フロントデファレンシャル機構、330…リアデファレンシャル機構、400…VGRSアクチュエータ、500…EPSアクチュエータ、600…ECB、610…ブレーキアクチュエータ、620FL、620FR、620RL、620RR…制動装置。
【特許請求の範囲】
【請求項1】
前輪又は後輪の舵角を、該舵角の変化を促すドライバ操作から独立して変化させることが可能な舵角可変手段と、
前記前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段と
を備えた車両を制御する装置であって、
ヨーレートが所定の不感帯相当値に抑制された横方向移動として規定される平行移動を実現するための、該平行移動を規定する複数の第1状態量の目標値を設定する第1設定手段と、
予め設定された前記複数の第1状態量と前記舵角及び前記左右制駆動力差に夫々相関する複数の第2状態量との相対関係を規定する車両運動モデル、並びに前記設定された複数の第1状態量の目標値に基づいて、前記平行移動を実現するための前記複数の第2状態量の目標値を設定する第2設定手段と
を具備することを特徴とする車両の制御装置。
【請求項2】
前記第2状態量の各々が前記設定された目標値となるように前記舵角可変手段及び前記制駆動力可変手段を制御する制御手段を更に具備する
ことを特徴とする請求項1に記載の車両の制御装置。
【請求項3】
前記第1状態量は、前記車両のヨーレート相当値及び前記車両の車体スリップ角相当値である
ことを特徴とする請求項1又は2に記載の車両の制御装置。
【請求項4】
前記第2状態量は、前記舵角及び前記車両の重心点周りのモーメントである
ことを特徴とする請求項1から3のいずれか一項に記載の車両の制御装置。
【請求項5】
前記不感帯相当値は、少なくともゼロ値を含み且つ基準値以下の値である
ことを特徴とする請求項1から4のいずれか一項に記載の車両の制御装置。
【請求項6】
前記車両運動モデルは、前記車両の物理構成に応じて定まる時定数要素を含む
ことを特徴とする請求項1から5のいずれか一項に記載の車両の制御装置。
【請求項7】
前記車両の車輪に発生する前後力、横力及び上下力のうち少なくとも一つを含む第1補正要素を特定する第1補正要素特定手段と、
該特定された第1補正要素に基づいて前記車両運動モデルを補正する第1補正手段と
を更に具備する
ことを特徴とする請求項1から6のいずれか一項に記載の車両の制御装置。
【請求項8】
前記車両に発生する前後方向加速度、横方向加速度及びロール剛性配分のうち少なくとも一つを含む第2補正要素を特定する第2補正要素特定手段と、
該特定された第2補正要素に基づいて前記車両運動モデルを補正する第2補正手段と
を更に具備する
ことを特徴とする請求項1から7のいずれか一項に記載の車両の制御装置。
【請求項1】
前輪又は後輪の舵角を、該舵角の変化を促すドライバ操作から独立して変化させることが可能な舵角可変手段と、
前記前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段と
を備えた車両を制御する装置であって、
ヨーレートが所定の不感帯相当値に抑制された横方向移動として規定される平行移動を実現するための、該平行移動を規定する複数の第1状態量の目標値を設定する第1設定手段と、
予め設定された前記複数の第1状態量と前記舵角及び前記左右制駆動力差に夫々相関する複数の第2状態量との相対関係を規定する車両運動モデル、並びに前記設定された複数の第1状態量の目標値に基づいて、前記平行移動を実現するための前記複数の第2状態量の目標値を設定する第2設定手段と
を具備することを特徴とする車両の制御装置。
【請求項2】
前記第2状態量の各々が前記設定された目標値となるように前記舵角可変手段及び前記制駆動力可変手段を制御する制御手段を更に具備する
ことを特徴とする請求項1に記載の車両の制御装置。
【請求項3】
前記第1状態量は、前記車両のヨーレート相当値及び前記車両の車体スリップ角相当値である
ことを特徴とする請求項1又は2に記載の車両の制御装置。
【請求項4】
前記第2状態量は、前記舵角及び前記車両の重心点周りのモーメントである
ことを特徴とする請求項1から3のいずれか一項に記載の車両の制御装置。
【請求項5】
前記不感帯相当値は、少なくともゼロ値を含み且つ基準値以下の値である
ことを特徴とする請求項1から4のいずれか一項に記載の車両の制御装置。
【請求項6】
前記車両運動モデルは、前記車両の物理構成に応じて定まる時定数要素を含む
ことを特徴とする請求項1から5のいずれか一項に記載の車両の制御装置。
【請求項7】
前記車両の車輪に発生する前後力、横力及び上下力のうち少なくとも一つを含む第1補正要素を特定する第1補正要素特定手段と、
該特定された第1補正要素に基づいて前記車両運動モデルを補正する第1補正手段と
を更に具備する
ことを特徴とする請求項1から6のいずれか一項に記載の車両の制御装置。
【請求項8】
前記車両に発生する前後方向加速度、横方向加速度及びロール剛性配分のうち少なくとも一つを含む第2補正要素を特定する第2補正要素特定手段と、
該特定された第2補正要素に基づいて前記車両運動モデルを補正する第2補正手段と
を更に具備する
ことを特徴とする請求項1から7のいずれか一項に記載の車両の制御装置。
【図1】

【図2】
【図2】
【公開番号】特開2011−207313(P2011−207313A)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願番号】特願2010−76208(P2010−76208)
【出願日】平成22年3月29日(2010.3.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願日】平成22年3月29日(2010.3.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]