
車両の制御装置
【課題】アクセルペダルの急な踏み離し操作等によるアップシフト側の変速の際には、変速に伴う回転速度の低下に対して、実回転速度に対する機関圧縮比の応答遅れを抑制・回避することができる制御装置を提供する。
【解決手段】通常の運転状態では、現在の実回転速度に基づいて目標負荷追従圧縮比を算出し、これを目標圧縮比として設定し、この目標圧縮比へ向けて可変圧縮比機構を駆動制御する。但し、車両運転者により操作されるアクセル開度APOに基づいて、変速機の変速比が大から小へと変速されるアップシフトを予測したときには、アクセル開度APO等に基づいて変速後の予測変速比を予測し、この予測変速比に基づいて変速後のエンジンの予測回転速度を算出し、この予測回転速度等に基づいて目標瞬時圧縮比を算出し、これを目標圧縮比として設定する。
【解決手段】通常の運転状態では、現在の実回転速度に基づいて目標負荷追従圧縮比を算出し、これを目標圧縮比として設定し、この目標圧縮比へ向けて可変圧縮比機構を駆動制御する。但し、車両運転者により操作されるアクセル開度APOに基づいて、変速機の変速比が大から小へと変速されるアップシフトを予測したときには、アクセル開度APO等に基づいて変速後の予測変速比を予測し、この予測変速比に基づいて変速後のエンジンの予測回転速度を算出し、この予測回転速度等に基づいて目標瞬時圧縮比を算出し、これを目標圧縮比として設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、可変圧縮比機構を備えたエンジンと変速機とを有する車両の制御装置に関する。
【背景技術】
【0002】
特許文献1には、機関圧縮比を変更可能な可変圧縮比機構を備えるエンジンにおいて、車両運転者によるアクセル踏み込み速度が大きいときに、ノッキングやプレイグニッション(以下、ノッキング等と呼ぶ)を生じることのないように、機関圧縮比の変更速度または変更開始時期を早める技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−90236号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
可変圧縮比機構の目標圧縮比は、一般的に、その時点(現在)のエンジンの実回転速度や負荷に応じて設定される。例えば、エンジン回転速度の低下に従って、ノッキング等を生じることのないように、目標圧縮比を低下させる。一方、エンジンの出力は車両変速機により変速されて駆動輪に伝達されるために、変速時にはエンジン回転速度が比較的大きく増減する。特に、有段式の自動変速機の場合、変速時にエンジン回転速度がステップ的に大きく変動する。
【0005】
車両変速機の変速比は車速やエンジンの吸入空気量などに応じて設定されるが、例えば車両運転者がアクセルペダルを踏み込んでいる状態からアクセルペダルを踏み離すアクセル踏み離し操作の際には、車速や吸入空気量の低下に伴って車両変速機の変速比が大から小に、つまり有段変速機における変速段(変速ギヤ)が低速段から高速段に変速される。このような、いわゆる(パワーオフ)アップシフト側の変速の際には、変速比の低下によりエンジン回転速度が低下し、このエンジン回転速度の低下を受けて目標圧縮比が低下側に変更されることになる。
【0006】
ここで、可変圧縮比機構による機関圧縮比の変更速度はアクチュエータの駆動能力や各部品のフリクションなどにより不可避的に制限を受ける。但し、通常はノッキング等を生じることのないように、圧縮比の応答速度をある程度織り込んだ形で目標圧縮比がある程度の余裕をもって設定されるために、上述したアップシフト側への変速の際にも、多くの場合、ノッキング等を生じる懸念は少ない。しかしながら、運転者のアクセルの踏み離し操作が急な場合などでは、例えば1速から3速、3速から5速というように2変速段(あるいはそれ以上)の急激な変速が行われることがある。このような急なアップシフト側への変速によるエンジン回転速度の急激な低下に対し、あくまでその時点でのエンジン回転速度に応じて目標圧縮比を設定すると、目標圧縮比に対する実圧縮比の低下が遅れて、ノッキング等を生じる恐れがある。そこで、このようなアップシフト側への変速によるエンジン回転速度の急激な低下を見込んで目標圧縮比を予め低く設定すると、非変速時の通常(定常)の運転状態であっても目標圧縮比が低く制限されることとなり、低圧縮比化により熱効率や燃費等が低下する。
【課題を解決するための手段】
【0007】
そこで本発明は、機関圧縮比を変更可能な可変圧縮比機構を備えたエンジンの出力を変速機を介して駆動輪に伝達する車両の制御装置において、
目標圧縮比へ向けて上記可変圧縮比機構を駆動制御する圧縮比制御手段と、
上記エンジンの実回転速度を検出する回転速度検出手段と、
上記実回転速度に基づいて算出される第1目標圧縮比を上記目標圧縮比として設定する第1目標圧縮比設定手段と、
車両運転者の操作に基づいて、上記変速機における変速比の大から小への変速を予測した変速予測時に、実回転速度に基づく上記第1目標圧縮比より小さな第2目標圧縮比を上記目標圧縮比として設定する第2目標圧縮比設定手段と、を有する、
ことを特徴としている。
【0008】
あるいは、機関圧縮比を変更可能な可変圧縮比機構を備えたエンジンの出力を変速機を介して駆動輪に伝達する車両の制御装置において、
目標圧縮比へ向けて上記可変圧縮比機構を駆動制御する圧縮比制御手段と、
上記エンジンの実回転速度を検出する回転速度検出手段と、
上記実回転速度に基づいて算出される第1目標圧縮比を上記目標圧縮比として設定する第1目標圧縮比設定手段と、
車両運転者の操作に基づいて、上記変速機における変速比の大から小への変速を予測した変速予測時に、第2目標圧縮比を上記目標圧縮比として設定する第2目標圧縮比設定手段と、を有し、
この第2目標圧縮比設定手段は、
上記車両運転者の操作に基づいて変速後の予測変速比を算出し、
この予測変速比に基づいて変速後のエンジンの予測回転速度を算出し、
この予測回転速度に基づいて上記第2目標圧縮比を算出する、
ことを特徴としている。
【0009】
すなわち、第1目標圧縮比がその時点(現在)のエンジンの実回転速度に基づいて算出されるものであるのに対し、第2目標圧縮比は、変速前の変速予測時において、変速比の大から小側(有段変速機におけるアップシフト側)への変速後の予測変速比に応じた予測回転速度に基づいて算出されるもので、つまり変速に伴うエンジン回転速度の低下を見越した形で算出されるものである。
【0010】
例えば運転者がアクセルペダルを急に踏み離した場合には、このアクセルペダルの踏み離し操作に基づいて、実際にアップシフト側への変速が行われる前に、変速後の予測変速比を予測する。そして、この予測変速比に基づく変速後の予測回転速度に応じて第2目標圧縮比を求め、この第2目標圧縮比を目標圧縮比として設定する。これにより、実際にアップシフト側への変速が行われる前に、変速後のエンジン回転速度の急激な低下を見越した形で目標圧縮比が設定されることになり、実圧縮比の変更(低下)遅れを抑制することができる。このため、実回転速度に対する圧縮比の追従性が向上し、ノッキング等の発生を抑制・回避することが可能となる。
【0011】
一方、このようなアップシフト側への変速以外の通常(定常)の運転状態のときには、現在の実回転速度に応じた第1目標圧縮比が目標圧縮比として設定されるために、変速によるエンジン回転速度の低下を考慮して予め目標圧縮比を低く設定しなくてすみ、低圧縮比化による燃焼効率の低下や燃費性能の低下を招くことがなく、また、不要な圧縮比の変動によるアクチュエータの消費エネルギーの低減や燃費の向上を図ることができる。
【発明の効果】
【0012】
本発明によれば、目標圧縮比を予め低く設定することなく、変速比の大から小への変速に伴うエンジン回転速度の低下時にも、実回転速度に対する機関圧縮比の応答遅れを抑制・回避することができる。
【図面の簡単な説明】
【0013】
【図1】本発明に係る車両の制御装置の一例を示すシステム図。
【図2】可変圧縮比機構を示す断面対応図。
【図3】上記可変圧縮比機構の高圧縮比位置(A)及び低圧縮比位置(B)におけるリンク姿勢を示す説明図。
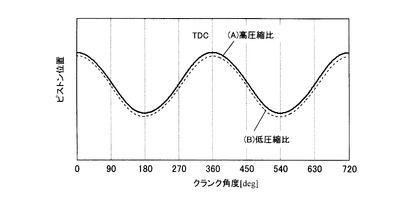
【図4】上記可変圧縮比機構による高圧縮比位置(A)及び低圧縮比位置(B)におけるピストンモーションを示す特性図。
【図5】車両変速機の変速マップの一例を示す説明図。
【図6】圧縮比マップの一例を示す説明図。
【図7】比較例に係るアップシフト変速時の目標圧縮比等の変化を示すタイミングチャート。
【図8】本発明の第1実施例に係る目標圧縮比の設定処理を簡略的に示すブロック図。
【図9】上記第1実施例の目標圧縮比の設定処理を示すフローチャート。
【図10】上記第1実施例の予測回転速度の算出処理を示すフローチャート。
【図11】上記第1実施例の予測負荷の算出処理を示すフローチャート。
【図12】上記第1実施例の目標瞬時圧縮比の算出処理を示すフローチャート。
【図13】上記第1実施例の目標負荷追従圧縮比の算出処理を示すフローチャート。
【図14】上記第1実施例の目標圧縮比の選択処理を示すフローチャート。
【図15】上記第1実施例に係るアップシフト変速時の目標圧縮比等の変化を示すタイミングチャート。
【図16】上記可変圧縮比機構における低圧縮比位置と高圧縮比位置でのコントロールリンクとコントロールシャフト等の位置関係を示す説明図。
【図17】本発明の第2実施例に係る予測回転速度の算出処理を示すフローチャート。
【図18】上記第2実施例の第2予測変速比の設定テーブルを示す説明図。
【図19】上記第2実施例に係るアップシフト変速時の目標圧縮比等の変化を示すタイミングチャート。
【図20】本発明の第3実施例に係る目標圧縮比の選択処理を示すフローチャート。
【発明を実施するための形態】
【0014】
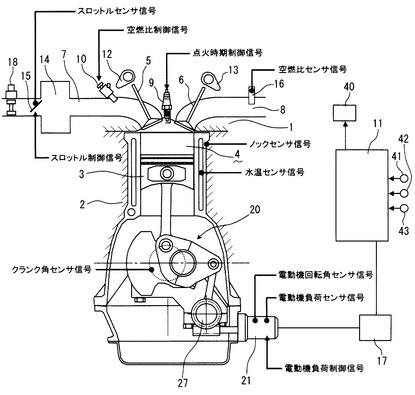
以下、本発明の好ましい実施例を図面に基づいて詳細に説明する。図1を参照して、このエンジン(内燃機関)は、シリンダヘッド1とシリンダブロック2とにより大略構成されており、かつ、ピストン3の上方に画成される燃焼室4内の混合気を火花点火する点火プラグ9を備えたガソリンエンジン等の火花点火式エンジンである。このエンジンは、周知のように、吸気カム12により駆動されて吸気ポート7を開閉する吸気弁5と、排気カム13により駆動されて排気ポート8を開閉する排気弁6と、吸気ポート7に燃料を噴射する燃料噴射弁10と、吸気コレクタ14の上流側を開閉して吸入空気量を調整するスロットル15と、を有し、かつ、機関圧縮比を変更可能な可変圧縮比機構20を備えている。
【0015】
制御部11は、CPU,ROM,RAM及び入出力インターフェースを備えた周知のデジタルコンピュータであり、車両運転状態を表す後述のセンサ類から得られる信号等に基づいて、燃料噴射弁10,点火プラグ9,スロットル15,及び可変圧縮比機構20の電動機21等の各種アクチュエータへ制御信号を出力して、燃料噴射量,燃料噴射時期,点火時期,スロットル開度,及び機関圧縮比等を統括的に制御する。
【0016】
車両運転状態を表す各種のセンサ類として、エンジンの現在の(実)吸入空気量を検出するエアフロメータ18、アクセルペダルのアクセル開度APOを検出するアクセル開度センサ41、ブレーキペダルの踏力を検出するブレーキ踏力センサ42、排気の空燃比を検出する空燃比センサ、スロットル開度を検出するスロットルセンサ、エンジン水温を検出する水温センサ、エンジンの現在の(実)回転速度を検出するクランク角センサ43、ノッキングの有無を検出するノックセンサの他、バッテリ17から供給される電力により可変圧縮比機構20のコントロールシャフト27を駆動する電動機21からの回転角センサ信号や負荷センサ信号等が設けられている。
【0017】
このエンジンの出力は有段式の自動変速機40を介して駆動輪に伝達される。この変速機40の変速制御は、例えば上記の制御部11により行われ、あるいはエンジン用の上記制御部11と情報伝達可能に接続された他の変速用制御部により行われる。
【0018】
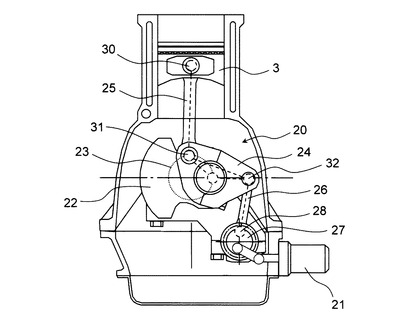
図2及び図3を参照して、可変圧縮比機構20は、ピストン3とクランシャフト22のクランクピン23とを複数のリンクで連係した複リンク式ピストン−クランク機構を利用したものであって、クランクピン23に回転可能に装着されたロアリンク24と、このロアリンク24とピストン3とを連結するアッパリンク25と、偏心軸部28が設けられたコントロールシャフト27と、偏心軸部28とロアリンク24とを連結するコントロールリンク26と、を有している。アッパリンク25は、一端がピストンピン30に回転可能に取り付けられ、他端が第1連結ピン31によりロアリンク24と回転可能に連結されている。コントロールリンク26は、一端が第2連結ピン32によりロアリンク24と回転可能に連結されており、他端が偏心軸部28に回転可能に取り付けられている。
【0019】
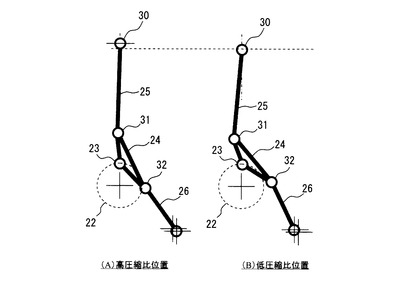
電動機21によりコントロールシャフト27の回転位置を変更することにより、図3にも示すように、コントロールリンク26によるロアリンク24の姿勢が変化し、ピストン3のピストンモーション(ストローク特性)、すなわちピストン3の上死点位置及び下死点位置の変化を伴って、機関圧縮比が連続的に変更・制御される。
【0020】
このような複リンク式ピストン−クランク機構を利用した可変圧縮比機構20によれば、エンジン運転状態に応じて機関圧縮比を適正化することで燃費や出力向上を図れることに加え、ピストンとクランクピンとを一本のリンクで連結した単リンク機構に比して、ピストンストローク特性(図4参照)そのものを例えば単振動に近い特性に適正化することができる。また、単リンク機構に比して、クランクスローに対するピストンストロークを長くとることができ、エンジン全高の短縮化や高圧縮比化を図ることができる。更に、アッパリンク25の傾きを適正化することで、ピストン3やシリンダに作用するスラスト荷重を低減・適正化し、ピストン3やシリンダの軽量化を図ることができる。なお、アクチュエータとしては図示の電動機21に限らず、例えば油圧制御弁を用いた油圧式の駆動装置であっても良い。
【0021】
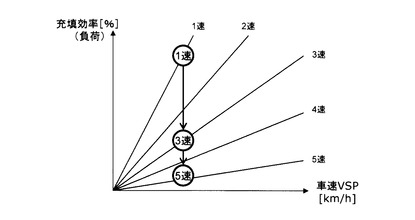
次に、図5〜図7を参照して、変速機40によるアップシフト側への変速に伴い実圧縮比の低下遅れを生じる現象・理由について説明する。図5は、車速VSPと充填効率(負荷)に応じた5速有段式の自動変速機40の変速マップを示している。なお、変速比は変速機の入力回転速度を変速比の出力回転速度で割った値であるため、高速段(5速)では変速比が小となり、低速段(1速)では変速比が大となる関係にある。充填効率はエアフロメータ18により検出される実際の吸入空気量に基づく値であり、従って、変速段・変速比は、実質的に車速VSPと実吸入空気量に基づいて設定され、実吸入空気量が大きくなるに従って低速段側・大変速比側、吸入空気量が小さくなるに従って高速段側・小変速比側に設定される。また、車速が大きくなるほど高速段側・小変速比側に設定される。
【0022】
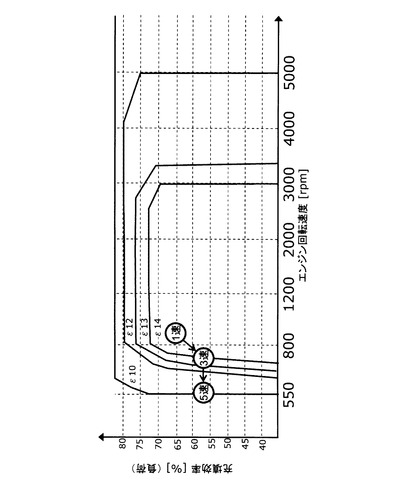
図6は、目標圧縮比の設定マップを示している。同図に示すように、目標圧縮比はエンジン回転速度と上記の充填効率(負荷)とに基づいて設定される。ここで、主に低回転・低負荷側の領域では、回転速度が低下するに従って、ノッキング等の発生を回避するために、目標圧縮比が低く設定される。
【0023】
図7は、比較例に係るアップシフト変速時における目標圧縮比及び実圧縮比等の変化の様子を示すタイミングチャートである。この比較例においては、後述する実施例とは異なり、目標圧縮比を常に現在の実回転速度に基づいて求めている。同図に示すように、減速開始タイミングt0において、運転者がアクセルペダルを踏み込んでいる状態からアクセルペダルを急に踏み離すと、アクセル開度APO(要求負荷)が急激に低下することに伴って、実吸入空気量(充填効率)が応答遅れを伴って低下し、この実吸入空気量の低下に応じて、変速比の大から小へ、つまり変速段の低速段側から高速段側へのアップシフトが行われる。この例では、第1変速タイミングt1において1速から3速へ、更に第2変速タイミングt2において3速から5速へといった、一度に2変速段分の急激なアップシフトが行われる。このような急激なアップシフト変速により、エンジンの実回転速度がステップ的に大きく低下する。従って、この比較例のように常に実回転速度に応じて目標圧縮比を設定すると、アップシフト変速に伴う実回転速度の急激な低下に対して実圧縮比の低下が追従できなくなり、実回転速度が低下したタイミングt3において、目標圧縮比に対して実圧縮比が高圧縮比側に大きく乖離し、吸入空気量や回転速度に対して実圧縮比が高くなり過ぎて、ノッキングやプレイグニッション等を発生するおそれがある。
【0024】
本発明の実施例においては、このような変速機40の急激なアップシフト側への変速に伴う実圧縮比の低下遅れを抑制・回避するものであり、その具体的な制御内容について、以下に説明する。
【0025】
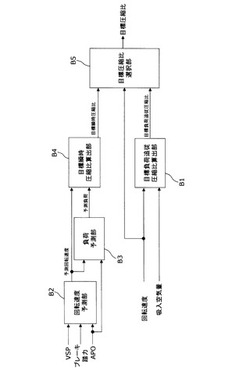
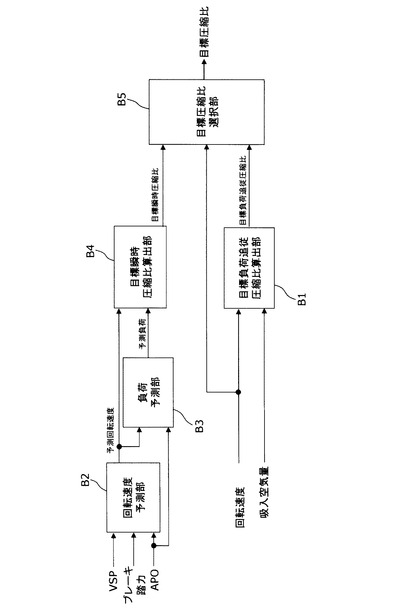
図8は、本発明の第1実施例に係る目標圧縮比の設定処理を示す制御ブロック図である。目標負荷追従圧縮比算出部B1では、クランク角センサ43等により得られるエンジンの現在の実回転速度と、エアフロメータ18により検出される現在のエンジンの実吸入空気量とに基づいて、例えば図6に示すような圧縮比マップを参照することで、第1目標圧縮比としての目標負荷追従圧縮比を算出する。すなわち、目標負荷追従圧縮比は、現在の実回転速度に基づいて算出されるもので、急なアップシフト側への変速時を除き、通常はこの目標負荷追従圧縮比が目標圧縮比として設定される。
【0026】
一方、目標負荷追従圧縮比算出部B4では、車速VSPの他、車両運転者により操作されるアクセル開度APOやブレーキ踏力等に基づいて、第2目標圧縮比としての目標瞬時圧縮比を算出・予測する。具体的には、回転速度予測部B2では、アクセル開度APOやブレーキ踏力等に基づいて、変速が実際に行われる前に、変速比が大から小へと急激に変速されるアップシフト側の変速を予測し、変速後のエンジンの予測回転速度を算出・予測する。負荷予測部B3では、上記の予測回転速度とアクセル開度APO等に基づいて、予測負荷を算出・予測する。そして、上記の目標負荷追従圧縮比算出部B4では、予測負荷と予測回転速度とに基づいて、目標瞬時圧縮比を算出する。この目標瞬時圧縮比は、アップシフトが予測されたときに、変速後の予測負荷及び予測回転速度に基づいて算出される目標圧縮比に相当する。この目標瞬時圧縮比の算出では、目標負荷追従圧縮比算出部B1と同様の圧縮比マップ(図6参照)を用いてもよく、あるいは、目標瞬時圧縮比の算出用に個別に予め適合された専用の圧縮比マップを用いるようにしても良い。
【0027】
そして、目標圧縮比選択部B5では、上記の目標負荷追従圧縮比と目標瞬時圧縮比の一方を、目標圧縮比として選択・設定する。上述したように、基本的には現在の回転速度に応じた目標負荷追従圧縮比が選択され、急激なアップシフト側への変速を予測した場合にのみ、変速後の回転速度に応じた目標瞬時圧縮比が選択される。制御部11は、この目標圧縮比に基づいて電動機21へ指令値を出力し、可変圧縮比機構20を駆動制御する。
【0028】
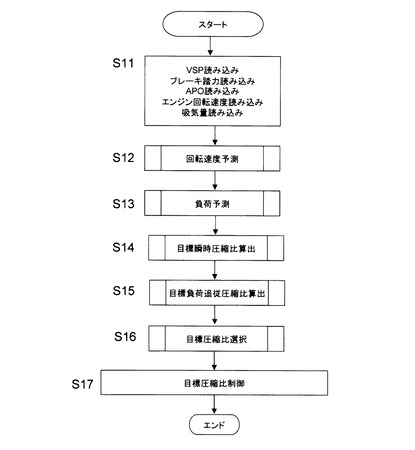
このような目標圧縮比の設定処理のより具体的な内容について、図9〜図14のフローチャートを参照して説明する。図9を参照して、ステップS11では、車両運転状態を示す各種パラメータ、つまり車速VSP、ブレーキ踏力、アクセル開度APO、エンジン回転速度及び吸入空気量(吸気量)等を読み込む。ステップS12では、上記の回転速度予測部B2により予測回転速度を算出する。ステップS13では、上記の負荷予測部B3により予測負荷を算出する。ステップS14では、上記の目標瞬時圧縮比算出部B4により目標瞬時圧縮比を算出する。ステップS15では、上記の目標負荷追従圧縮比算出部B1により目標負荷追従圧縮比を算出する。ステップS16では、上記の目標圧縮比選択部B5により目標圧縮比を選択する。そして、ステップS17では、目標圧縮比と実圧縮比が一致又は所定値以下となるように、目標圧縮比へ向けて可変圧縮比機構20を駆動制御する。
【0029】
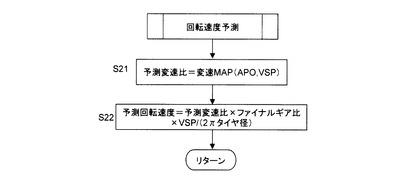
図10は上記ステップS12の回転速度予測処理の詳細を示すサブルーチンである。ステップS21では、車速VSPとアクセル開度APOに基づいて、変速後の予測変速比を求める。例えば、アクセル開度APOから変速後の充填効率を求め、この充填効率と車速VSPとにより図5に示すような変速マップをルックアップすることで、変速後の予測変速比を求める。ステップS22では、上記の予測変速比とファイナルギヤ比と車速と駆動輪のタイヤ径とに基づいて、変速後の予測回転速度を算出する。
【0030】
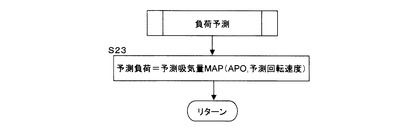
図11は、上記ステップS13の負荷予測処理を示すサブルーチンである。ステップS23では、アクセル開度APOと上記の予測回転速度とに基づいて、予め設定される予測吸入空気量マップを参照して、変速後の予測負荷を求める。
【0031】
図12は、上記ステップS14の目標瞬時圧縮比算出処理を示すサブルーチンである。ステップS24では、上記の予測負荷と予測回転速度とに基づいて、例えば図6に示すような目標圧縮比マップを参照して、変速後の予測回転速度に応じた目標瞬時圧縮比を求める。
【0032】
図13は、上記ステップS15の目標負荷追従圧縮比算出処理を示すサブルーチンである。ステップS25では、現在の負荷と現在の実回転速度とに基づいて、例えば図6に示すような目標圧縮比マップを参照して、現在の実回転速度に応じた目標負荷追従圧縮比を求める。
【0033】
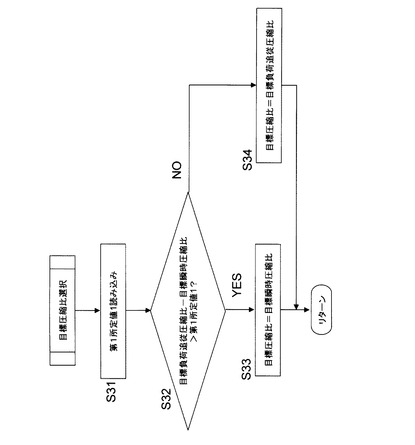
図14は、上記ステップS16の目標圧縮比選択処理を示すサブルーチンである。ステップS31では、目標負荷追従圧縮比に対する目標瞬時圧縮比の低下量と比較される判定用の予め設定された第1所定値1(例えば、0.5)を読み込む。
【0034】
そして、ステップS32では、上記低下量が第1所定値1を超えているかを判定する。つまり、現在の実回転速度に応じた目標負荷追従圧縮比に対し、アップシフト側の変速による回転変動を見越した変速後の予測回転速度に応じた目標瞬時圧縮比の低下側への乖離が、第1所定値1よりも大きいかを判定する。
【0035】
上記低下量が第1所定値1を超える場合、つまりアップシフト側の変速による目標圧縮比の低下側への乖離が大きい場合には、ノッキング等の発生の懸念が生じるので、ステップS33へ進み、変速後の予測回転速度・予測変速比に応じた目標瞬時圧縮比を目標圧縮比として設定する。
【0036】
一方、低下量が第1所定値1以下の場合、つまり変速による目標圧縮比の低下側への乖離が小さい場合には、ノッキング等の発生の懸念がないと判断して、ステップS34へ進み、現在の実回転速度に応じた目標負荷追従圧縮比を目標圧縮比として設定する。
【0037】
つまり、この実施例においては、変速前後の目標圧縮比の低下量によってアップシフト側への急激な変速を予測しており、低下量が第1所定値1を超える場合には実圧縮比の低下遅れを伴うアップシフト側の変速を予測して、変速後の予測回転速度に応じた目標瞬時圧縮比を目標圧縮比として設定する。これによって、変速後の回転速度の急激な変動(低下)を見越した形で目標圧縮比が事前に低く設定され、ノッキング等の発生を確実に抑制・回避することができる。
【0038】
一方、上記の急なアップシフト変速以外の通常(定常)の運転状態においては、変速前後の目標圧縮比の低下量が第1所定値1を超えることはなく、現在の回転速度に応じた目標負荷追従圧縮比が目標圧縮比として設定される。従って、変速による回転変動を見越して目標圧縮比が不必要に低く設定されることがなく、低圧縮比化による燃焼効率の低下や燃費の低下を回避することができる。また、予測変速比として先読みした変速が実際には行われなかったときに、先読みした予測変速比に基づく圧縮比制御によって圧縮比が不用意に変動することもない。
【0039】
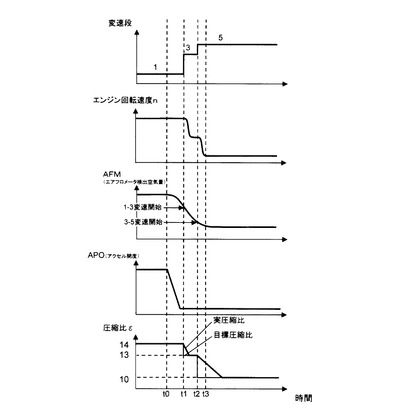
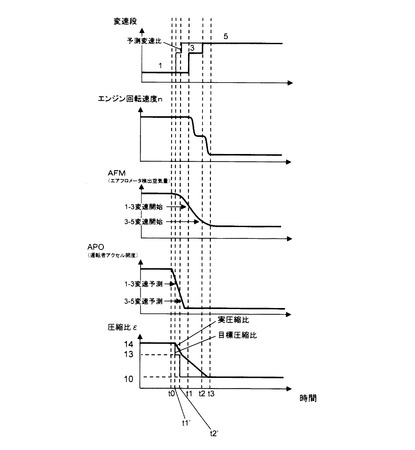
図15は、図7の比較例に対し、上記第1実施例の目標圧縮比の設定を用いた場合におけるアップシフト変速時のタイミングチャートを示している。図7の比較例と同様、タイミングt1において1速から3速、タイミングt2において3速から5速へのアップシフトが行われる。ここで本実施例においては、タイミングt1,t2よりも前のタイミングt1',t2'において、アップシフト側の変速が行われることを事前に予測し、変速後の予測回転速度に基づいて目標圧縮比が低く設定される。この結果、実際の変速後にエンジン回転速度が急激に低下したタイミングt3'においても、実圧縮比と目標圧縮比との乖離が十分に小さく抑えられ、実圧縮比の低下遅れによるノッキング等の発生を抑制・回避することができる。
【0040】
特に、この例のように、変速後半の3速から5速へのアップシフト時に、変速による回転速度の低下により圧縮比が13付近から10付近へ急激に大きく低下する場合に、実圧縮比の低下遅れを招き易く、本実施例の適用が極めて有効である。
【0041】
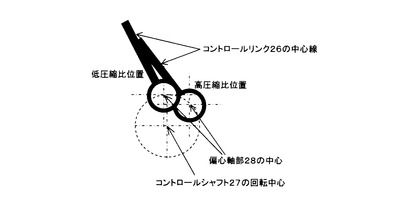
更に、図16を参照して説明すると、この可変圧縮比機構20は、高圧縮比側から低圧縮比側への変更が遅れると過渡的にノッキング等を生じるおそれがあるために、高圧縮比側での圧縮比変更速度が低圧縮比側での圧縮比変更速度よりも大きくなるように構成されている。具体的には、高圧縮比位置の設定では、低圧縮比位置の設定に比して、コントロールリンク26のリンク中心線と、コントロールシャフト27の回転中心と偏心軸部28の中心とを結ぶ偏心線と、のなす角度が直角に近くなり、モーメントの腕長さが大きくなって、電動機21(アクチュエータ)による駆動モーメントが大きくなり、ひいては変更速度が大きくなるように構成されている。このため、図15にも示すように、高圧縮比側では低圧縮比側に比して実圧縮比の変化速度(傾き)が大きくなっている。このようなことから、特に低圧縮比側への変速後半に実圧縮比の変更遅れを招き易く、本実施例の適用が極めて有効なものとなる。
【0042】
次に、本発明の第2実施例について、図17〜図19を参照して説明する。なお、以下の実施例では上述した第1実施例と異なる部分について主に説明し、共通する構成については重複する説明を適宜省略する。
【0043】
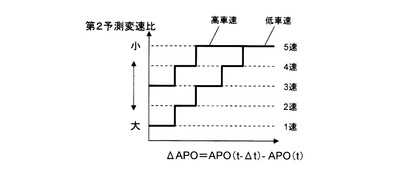
例えば、運転者による急なアクセル踏み離し操作のように、車両運転者の操作速度が大きい場合には、その後の変速による回転速度の変動も急激なものとなり易く、圧縮比の応答遅れを招き易い。そこでこの第2実施例においては、変速予測時に、車両運転者の操作速度に相当するアクセル離し速度ΔAPOが大きくなるほど予測変速比が小さくなるように、操作速度に基づいて変速後の予測変速比(第2予測変速比)を算出している。
【0044】
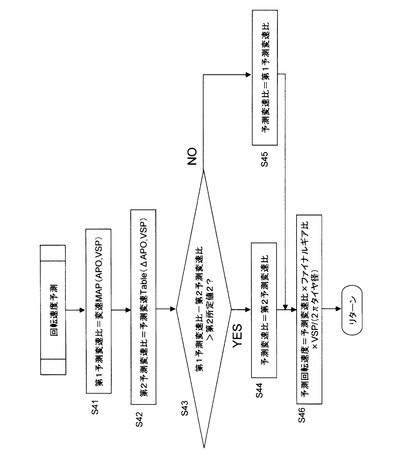
図17は、予測回転速度の算出処理のサブルーチンであり、第1実施例における図10の予測回転速度の算出処理のサブルーチンに相当するものである。ステップS41では、図10のステップS21と同様、アクセル開度APOと車速VSPとに基づいて、変速後の第1予測変速比を求める。例えば、アクセル開度APOから充填効率を求め、この充填効率と車速VSPから図5に示す変速マップを参照して第1予測変速比を求める。
【0045】
ステップS42では、アクセルペダルの踏み離し速度(アクセル離し速度)ΔAPOと車速VSPとに基づいて、図18に示すような予測変速テーブルを参照して、アップシフト側への変速後の第2予測変速比を求める。ここで、アクセル離し速度ΔAPOは、ここでは一演算前(例えば、10ms前)のアクセル開度APO(t−Δt)に対する現在のアクセル開度APO(t)の低下量として求めている。この第2予測変速比は、アクセル開度APO(あるいは、吸入空気量)に基づいて算出される第1予測変速比に対し、更に小変速比側(高速段側)への変速を先読みした値として求められるものであり、アクセル離し速度ΔAPOが大きくなるほど小変速比側(高速段側)の値とされ、少なくとも第1予測変速比よりも小さな値とされる。
【0046】
ステップS43では、第1予測変速比に対する第2予測変速比の低下量が、予め設定される所定の第2所定値2を超えているかを判定する。上記の低下量が第2所定値2を超えていれば、急なアクセル踏み離しによるアップシフトであると判断して、ステップS44へ進み、アクセル離し速度ΔAPOに基づく第2予測変速比を予測変速比として設定する。一方、低下量が第2所定値2以下であれば、急なアップシフトによる変速が行われることはない判断して、ステップS45へ進み、上記の第1実施例と同様、アクセル開度APOと車速VSPに基づく第1予測変速比を予測変速比として設定する。ステップS46では、図7のステップS22と同様、選択された予測変速比とファイナルギヤ比と車速と駆動輪のタイヤ径とに基づいて、変速後の予測回転速度を算出する。この予測回転速度に基づいて第1実施例と同様に目標瞬時圧縮比が算出されることとなる。
【0047】
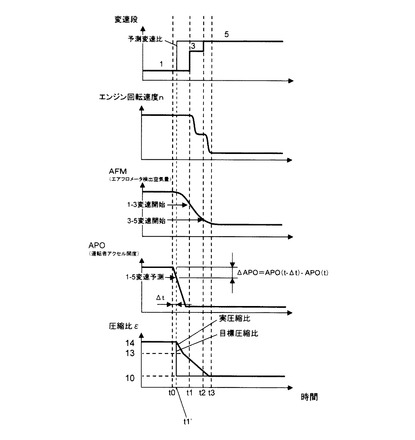
図19は、このような第2実施例を適用した場合のアップシフト変速時のタイミングチャートである。図15に示す第1実施例においては、減速開始タイミングt0の直後のタイミングt1'において、アクセル開度APOに基づいて1速から3速への変速を予測しているのに対し、この第2実施例においては、同じタイミングt1'において、アクセル離し速度ΔAPOが第2所定値2を超えている場合には、上記の第2予測変速比により1速から5速への変速を予測しており、つまり5速までの変速を更に先読みしたものとなっている。このため、このタイミングt1'から最終的な5速への変速を見越した形で目標圧縮比が更に低下側に設定されることとなり、上記第1実施例よりも更に確実にノッキング等の発生を抑制・回避することができる。
【0048】
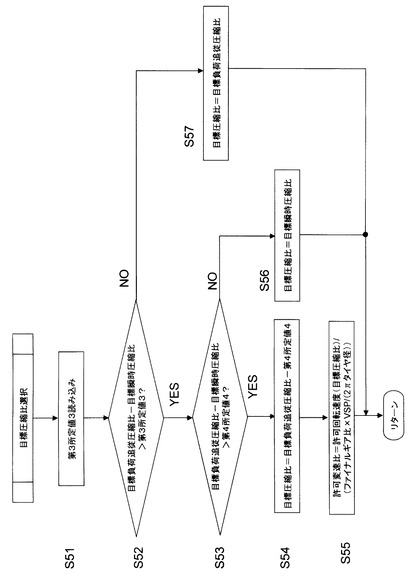
次に、図20を参照して本発明の第3実施例を説明する。この第3実施例では、第1実施例における図14の目標圧縮比選択処理を示すサブルーチンに代えて、図20の目標圧縮比及び変速比の選択処理のサブルーチンを用いている。
【0049】
この第3実施例においては、アップシフト変速を予測したときに、目標圧縮比の低下に加えて、必要に応じて変速比の制限・補正をも行うものである。ステップS51,S52及びS57は、第1実施例におけるステップS31,S32及びS34と同様の処理である。つまり、ステップS51では、目標負荷追従圧縮比に対する目標瞬時圧縮比の低下量と比較される第3所定値3(例えば、0.5)を読み込む。この第3所定値3は、第1実施例の第1所定値1に相当するものである。ステップS52では、上記の低下量が第3所定値3を超えているかを判定する。低下量が第3所定値3以下の場合、つまり変速前後の目標圧縮比の乖離が小さい場合には、ノッキング等の発生の懸念がないと判断して、ステップS57へ進み、現在の実回転速度に応じた目標負荷追従圧縮比を目標圧縮比として設定する。
【0050】
一方、低下量が第3所定値3を超えていれば、ステップS53へ進み、この低下量が、上記の第3所定値3よりも更に大きな値(例えば、1.0)である第4所定値4を超えているかを判定する。この第4所定値4は、変速前後の目標圧縮比の低下量の上限値に相当するものである。低下量が所定値を超えていなければ、ステップS56へ進み、上記の第1実施例と同様、変速後の予測回転速度に応じた目標瞬時圧縮比を目標圧縮比として選択・設定する。
【0051】
一方、目標圧縮比の低下量が第4所定値4を超えていれば、ステップS54へ進み、目標瞬時圧縮比ではなく、目標負荷追従圧縮比から第4所定値4を差し引いた値を目標圧縮比として設定する。つまり、目標圧縮比の低下量を第4所定値4に制限して、過度な目標圧縮比の低下を抑制し、これによる運転性の低下や圧縮比の変動を抑制している。
【0052】
そして、ステップS55では、ノッキング等を生じることのないように、変速比(変速段)を補正・制限する。具体的には、上記のステップS54で設定された目標圧縮比に基づいて、ノッキング等を生じることのない回転速度の下限値に相当する許可回転速度を求め、この許可回転速度に基づいて、ノッキング等を生じることのない変速比の最小値に相当する許可変速比を求める。具体的には、許可回転速度とファイナルギヤ比と車速VSPとタイヤ径とから許可変速比を求める。そして、この許可変速比に変速比を制限する。つまり、ステップS54において目標圧縮比の低下量を第4所定値4に抑えたことで、ノッキング等の発生を防ぎきれない場合には、アップシフト側への変速を低速段側に制限する。例えば、3速から5速へ変速する状況で、3速から4速へのアップシフトに制限する。これによって、アップシフトによる回転速度の低下が抑制され、回転速度の低下に対する実圧縮比の低下の遅れが緩和され、ひいては目標圧縮比の過度な低下を回避しつつ、変速比の制限によりノッキング等の発生を抑制・回避することができる。
【0053】
以上のように本発明を具体的な実施例に基づいて説明してきたが、本発明は上記実施例に限定されるものではなく、その趣旨を逸脱しない範囲で種々の変形・変更を含むものである。例えば、上記実施例では車両変速機として有段変速機を用いているが、CVT等の無段変速機に適用することも可能である。この場合、変速段を細分化して擬似的に変速段を実現すればよい。また、アクセル開度APOに代えて、このアクセル開度APOに相当するスロットル開度TVOを用いて制御を行うようにしても良い。更に、アップシフトを生じる状況としては、上述したようなアクセルペダルの急な踏み離し操作時に限らず、急ブレーキによる急減速時などが挙げられる。
【符号の説明】
【0054】
11…制御部
20…可変圧縮比機構
40…車両変速機
B1…目標負荷追従圧縮比算出部(第1目標圧縮比設定手段)
B2…回転速度予測部(第2目標圧縮比設定手段)
B3…負荷予測部(第2目標圧縮比設定手段)
B4…目標瞬時圧縮比算出部(第2目標圧縮比設定手段)
B5…目標圧縮比選択部(第1目標圧縮比設定手段、第2目標圧縮比設定手段)
【技術分野】
【0001】
本発明は、可変圧縮比機構を備えたエンジンと変速機とを有する車両の制御装置に関する。
【背景技術】
【0002】
特許文献1には、機関圧縮比を変更可能な可変圧縮比機構を備えるエンジンにおいて、車両運転者によるアクセル踏み込み速度が大きいときに、ノッキングやプレイグニッション(以下、ノッキング等と呼ぶ)を生じることのないように、機関圧縮比の変更速度または変更開始時期を早める技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−90236号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
可変圧縮比機構の目標圧縮比は、一般的に、その時点(現在)のエンジンの実回転速度や負荷に応じて設定される。例えば、エンジン回転速度の低下に従って、ノッキング等を生じることのないように、目標圧縮比を低下させる。一方、エンジンの出力は車両変速機により変速されて駆動輪に伝達されるために、変速時にはエンジン回転速度が比較的大きく増減する。特に、有段式の自動変速機の場合、変速時にエンジン回転速度がステップ的に大きく変動する。
【0005】
車両変速機の変速比は車速やエンジンの吸入空気量などに応じて設定されるが、例えば車両運転者がアクセルペダルを踏み込んでいる状態からアクセルペダルを踏み離すアクセル踏み離し操作の際には、車速や吸入空気量の低下に伴って車両変速機の変速比が大から小に、つまり有段変速機における変速段(変速ギヤ)が低速段から高速段に変速される。このような、いわゆる(パワーオフ)アップシフト側の変速の際には、変速比の低下によりエンジン回転速度が低下し、このエンジン回転速度の低下を受けて目標圧縮比が低下側に変更されることになる。
【0006】
ここで、可変圧縮比機構による機関圧縮比の変更速度はアクチュエータの駆動能力や各部品のフリクションなどにより不可避的に制限を受ける。但し、通常はノッキング等を生じることのないように、圧縮比の応答速度をある程度織り込んだ形で目標圧縮比がある程度の余裕をもって設定されるために、上述したアップシフト側への変速の際にも、多くの場合、ノッキング等を生じる懸念は少ない。しかしながら、運転者のアクセルの踏み離し操作が急な場合などでは、例えば1速から3速、3速から5速というように2変速段(あるいはそれ以上)の急激な変速が行われることがある。このような急なアップシフト側への変速によるエンジン回転速度の急激な低下に対し、あくまでその時点でのエンジン回転速度に応じて目標圧縮比を設定すると、目標圧縮比に対する実圧縮比の低下が遅れて、ノッキング等を生じる恐れがある。そこで、このようなアップシフト側への変速によるエンジン回転速度の急激な低下を見込んで目標圧縮比を予め低く設定すると、非変速時の通常(定常)の運転状態であっても目標圧縮比が低く制限されることとなり、低圧縮比化により熱効率や燃費等が低下する。
【課題を解決するための手段】
【0007】
そこで本発明は、機関圧縮比を変更可能な可変圧縮比機構を備えたエンジンの出力を変速機を介して駆動輪に伝達する車両の制御装置において、
目標圧縮比へ向けて上記可変圧縮比機構を駆動制御する圧縮比制御手段と、
上記エンジンの実回転速度を検出する回転速度検出手段と、
上記実回転速度に基づいて算出される第1目標圧縮比を上記目標圧縮比として設定する第1目標圧縮比設定手段と、
車両運転者の操作に基づいて、上記変速機における変速比の大から小への変速を予測した変速予測時に、実回転速度に基づく上記第1目標圧縮比より小さな第2目標圧縮比を上記目標圧縮比として設定する第2目標圧縮比設定手段と、を有する、
ことを特徴としている。
【0008】
あるいは、機関圧縮比を変更可能な可変圧縮比機構を備えたエンジンの出力を変速機を介して駆動輪に伝達する車両の制御装置において、
目標圧縮比へ向けて上記可変圧縮比機構を駆動制御する圧縮比制御手段と、
上記エンジンの実回転速度を検出する回転速度検出手段と、
上記実回転速度に基づいて算出される第1目標圧縮比を上記目標圧縮比として設定する第1目標圧縮比設定手段と、
車両運転者の操作に基づいて、上記変速機における変速比の大から小への変速を予測した変速予測時に、第2目標圧縮比を上記目標圧縮比として設定する第2目標圧縮比設定手段と、を有し、
この第2目標圧縮比設定手段は、
上記車両運転者の操作に基づいて変速後の予測変速比を算出し、
この予測変速比に基づいて変速後のエンジンの予測回転速度を算出し、
この予測回転速度に基づいて上記第2目標圧縮比を算出する、
ことを特徴としている。
【0009】
すなわち、第1目標圧縮比がその時点(現在)のエンジンの実回転速度に基づいて算出されるものであるのに対し、第2目標圧縮比は、変速前の変速予測時において、変速比の大から小側(有段変速機におけるアップシフト側)への変速後の予測変速比に応じた予測回転速度に基づいて算出されるもので、つまり変速に伴うエンジン回転速度の低下を見越した形で算出されるものである。
【0010】
例えば運転者がアクセルペダルを急に踏み離した場合には、このアクセルペダルの踏み離し操作に基づいて、実際にアップシフト側への変速が行われる前に、変速後の予測変速比を予測する。そして、この予測変速比に基づく変速後の予測回転速度に応じて第2目標圧縮比を求め、この第2目標圧縮比を目標圧縮比として設定する。これにより、実際にアップシフト側への変速が行われる前に、変速後のエンジン回転速度の急激な低下を見越した形で目標圧縮比が設定されることになり、実圧縮比の変更(低下)遅れを抑制することができる。このため、実回転速度に対する圧縮比の追従性が向上し、ノッキング等の発生を抑制・回避することが可能となる。
【0011】
一方、このようなアップシフト側への変速以外の通常(定常)の運転状態のときには、現在の実回転速度に応じた第1目標圧縮比が目標圧縮比として設定されるために、変速によるエンジン回転速度の低下を考慮して予め目標圧縮比を低く設定しなくてすみ、低圧縮比化による燃焼効率の低下や燃費性能の低下を招くことがなく、また、不要な圧縮比の変動によるアクチュエータの消費エネルギーの低減や燃費の向上を図ることができる。
【発明の効果】
【0012】
本発明によれば、目標圧縮比を予め低く設定することなく、変速比の大から小への変速に伴うエンジン回転速度の低下時にも、実回転速度に対する機関圧縮比の応答遅れを抑制・回避することができる。
【図面の簡単な説明】
【0013】
【図1】本発明に係る車両の制御装置の一例を示すシステム図。
【図2】可変圧縮比機構を示す断面対応図。
【図3】上記可変圧縮比機構の高圧縮比位置(A)及び低圧縮比位置(B)におけるリンク姿勢を示す説明図。
【図4】上記可変圧縮比機構による高圧縮比位置(A)及び低圧縮比位置(B)におけるピストンモーションを示す特性図。
【図5】車両変速機の変速マップの一例を示す説明図。
【図6】圧縮比マップの一例を示す説明図。
【図7】比較例に係るアップシフト変速時の目標圧縮比等の変化を示すタイミングチャート。
【図8】本発明の第1実施例に係る目標圧縮比の設定処理を簡略的に示すブロック図。
【図9】上記第1実施例の目標圧縮比の設定処理を示すフローチャート。
【図10】上記第1実施例の予測回転速度の算出処理を示すフローチャート。
【図11】上記第1実施例の予測負荷の算出処理を示すフローチャート。
【図12】上記第1実施例の目標瞬時圧縮比の算出処理を示すフローチャート。
【図13】上記第1実施例の目標負荷追従圧縮比の算出処理を示すフローチャート。
【図14】上記第1実施例の目標圧縮比の選択処理を示すフローチャート。
【図15】上記第1実施例に係るアップシフト変速時の目標圧縮比等の変化を示すタイミングチャート。
【図16】上記可変圧縮比機構における低圧縮比位置と高圧縮比位置でのコントロールリンクとコントロールシャフト等の位置関係を示す説明図。
【図17】本発明の第2実施例に係る予測回転速度の算出処理を示すフローチャート。
【図18】上記第2実施例の第2予測変速比の設定テーブルを示す説明図。
【図19】上記第2実施例に係るアップシフト変速時の目標圧縮比等の変化を示すタイミングチャート。
【図20】本発明の第3実施例に係る目標圧縮比の選択処理を示すフローチャート。
【発明を実施するための形態】
【0014】
以下、本発明の好ましい実施例を図面に基づいて詳細に説明する。図1を参照して、このエンジン(内燃機関)は、シリンダヘッド1とシリンダブロック2とにより大略構成されており、かつ、ピストン3の上方に画成される燃焼室4内の混合気を火花点火する点火プラグ9を備えたガソリンエンジン等の火花点火式エンジンである。このエンジンは、周知のように、吸気カム12により駆動されて吸気ポート7を開閉する吸気弁5と、排気カム13により駆動されて排気ポート8を開閉する排気弁6と、吸気ポート7に燃料を噴射する燃料噴射弁10と、吸気コレクタ14の上流側を開閉して吸入空気量を調整するスロットル15と、を有し、かつ、機関圧縮比を変更可能な可変圧縮比機構20を備えている。
【0015】
制御部11は、CPU,ROM,RAM及び入出力インターフェースを備えた周知のデジタルコンピュータであり、車両運転状態を表す後述のセンサ類から得られる信号等に基づいて、燃料噴射弁10,点火プラグ9,スロットル15,及び可変圧縮比機構20の電動機21等の各種アクチュエータへ制御信号を出力して、燃料噴射量,燃料噴射時期,点火時期,スロットル開度,及び機関圧縮比等を統括的に制御する。
【0016】
車両運転状態を表す各種のセンサ類として、エンジンの現在の(実)吸入空気量を検出するエアフロメータ18、アクセルペダルのアクセル開度APOを検出するアクセル開度センサ41、ブレーキペダルの踏力を検出するブレーキ踏力センサ42、排気の空燃比を検出する空燃比センサ、スロットル開度を検出するスロットルセンサ、エンジン水温を検出する水温センサ、エンジンの現在の(実)回転速度を検出するクランク角センサ43、ノッキングの有無を検出するノックセンサの他、バッテリ17から供給される電力により可変圧縮比機構20のコントロールシャフト27を駆動する電動機21からの回転角センサ信号や負荷センサ信号等が設けられている。
【0017】
このエンジンの出力は有段式の自動変速機40を介して駆動輪に伝達される。この変速機40の変速制御は、例えば上記の制御部11により行われ、あるいはエンジン用の上記制御部11と情報伝達可能に接続された他の変速用制御部により行われる。
【0018】
図2及び図3を参照して、可変圧縮比機構20は、ピストン3とクランシャフト22のクランクピン23とを複数のリンクで連係した複リンク式ピストン−クランク機構を利用したものであって、クランクピン23に回転可能に装着されたロアリンク24と、このロアリンク24とピストン3とを連結するアッパリンク25と、偏心軸部28が設けられたコントロールシャフト27と、偏心軸部28とロアリンク24とを連結するコントロールリンク26と、を有している。アッパリンク25は、一端がピストンピン30に回転可能に取り付けられ、他端が第1連結ピン31によりロアリンク24と回転可能に連結されている。コントロールリンク26は、一端が第2連結ピン32によりロアリンク24と回転可能に連結されており、他端が偏心軸部28に回転可能に取り付けられている。
【0019】
電動機21によりコントロールシャフト27の回転位置を変更することにより、図3にも示すように、コントロールリンク26によるロアリンク24の姿勢が変化し、ピストン3のピストンモーション(ストローク特性)、すなわちピストン3の上死点位置及び下死点位置の変化を伴って、機関圧縮比が連続的に変更・制御される。
【0020】
このような複リンク式ピストン−クランク機構を利用した可変圧縮比機構20によれば、エンジン運転状態に応じて機関圧縮比を適正化することで燃費や出力向上を図れることに加え、ピストンとクランクピンとを一本のリンクで連結した単リンク機構に比して、ピストンストローク特性(図4参照)そのものを例えば単振動に近い特性に適正化することができる。また、単リンク機構に比して、クランクスローに対するピストンストロークを長くとることができ、エンジン全高の短縮化や高圧縮比化を図ることができる。更に、アッパリンク25の傾きを適正化することで、ピストン3やシリンダに作用するスラスト荷重を低減・適正化し、ピストン3やシリンダの軽量化を図ることができる。なお、アクチュエータとしては図示の電動機21に限らず、例えば油圧制御弁を用いた油圧式の駆動装置であっても良い。
【0021】
次に、図5〜図7を参照して、変速機40によるアップシフト側への変速に伴い実圧縮比の低下遅れを生じる現象・理由について説明する。図5は、車速VSPと充填効率(負荷)に応じた5速有段式の自動変速機40の変速マップを示している。なお、変速比は変速機の入力回転速度を変速比の出力回転速度で割った値であるため、高速段(5速)では変速比が小となり、低速段(1速)では変速比が大となる関係にある。充填効率はエアフロメータ18により検出される実際の吸入空気量に基づく値であり、従って、変速段・変速比は、実質的に車速VSPと実吸入空気量に基づいて設定され、実吸入空気量が大きくなるに従って低速段側・大変速比側、吸入空気量が小さくなるに従って高速段側・小変速比側に設定される。また、車速が大きくなるほど高速段側・小変速比側に設定される。
【0022】
図6は、目標圧縮比の設定マップを示している。同図に示すように、目標圧縮比はエンジン回転速度と上記の充填効率(負荷)とに基づいて設定される。ここで、主に低回転・低負荷側の領域では、回転速度が低下するに従って、ノッキング等の発生を回避するために、目標圧縮比が低く設定される。
【0023】
図7は、比較例に係るアップシフト変速時における目標圧縮比及び実圧縮比等の変化の様子を示すタイミングチャートである。この比較例においては、後述する実施例とは異なり、目標圧縮比を常に現在の実回転速度に基づいて求めている。同図に示すように、減速開始タイミングt0において、運転者がアクセルペダルを踏み込んでいる状態からアクセルペダルを急に踏み離すと、アクセル開度APO(要求負荷)が急激に低下することに伴って、実吸入空気量(充填効率)が応答遅れを伴って低下し、この実吸入空気量の低下に応じて、変速比の大から小へ、つまり変速段の低速段側から高速段側へのアップシフトが行われる。この例では、第1変速タイミングt1において1速から3速へ、更に第2変速タイミングt2において3速から5速へといった、一度に2変速段分の急激なアップシフトが行われる。このような急激なアップシフト変速により、エンジンの実回転速度がステップ的に大きく低下する。従って、この比較例のように常に実回転速度に応じて目標圧縮比を設定すると、アップシフト変速に伴う実回転速度の急激な低下に対して実圧縮比の低下が追従できなくなり、実回転速度が低下したタイミングt3において、目標圧縮比に対して実圧縮比が高圧縮比側に大きく乖離し、吸入空気量や回転速度に対して実圧縮比が高くなり過ぎて、ノッキングやプレイグニッション等を発生するおそれがある。
【0024】
本発明の実施例においては、このような変速機40の急激なアップシフト側への変速に伴う実圧縮比の低下遅れを抑制・回避するものであり、その具体的な制御内容について、以下に説明する。
【0025】
図8は、本発明の第1実施例に係る目標圧縮比の設定処理を示す制御ブロック図である。目標負荷追従圧縮比算出部B1では、クランク角センサ43等により得られるエンジンの現在の実回転速度と、エアフロメータ18により検出される現在のエンジンの実吸入空気量とに基づいて、例えば図6に示すような圧縮比マップを参照することで、第1目標圧縮比としての目標負荷追従圧縮比を算出する。すなわち、目標負荷追従圧縮比は、現在の実回転速度に基づいて算出されるもので、急なアップシフト側への変速時を除き、通常はこの目標負荷追従圧縮比が目標圧縮比として設定される。
【0026】
一方、目標負荷追従圧縮比算出部B4では、車速VSPの他、車両運転者により操作されるアクセル開度APOやブレーキ踏力等に基づいて、第2目標圧縮比としての目標瞬時圧縮比を算出・予測する。具体的には、回転速度予測部B2では、アクセル開度APOやブレーキ踏力等に基づいて、変速が実際に行われる前に、変速比が大から小へと急激に変速されるアップシフト側の変速を予測し、変速後のエンジンの予測回転速度を算出・予測する。負荷予測部B3では、上記の予測回転速度とアクセル開度APO等に基づいて、予測負荷を算出・予測する。そして、上記の目標負荷追従圧縮比算出部B4では、予測負荷と予測回転速度とに基づいて、目標瞬時圧縮比を算出する。この目標瞬時圧縮比は、アップシフトが予測されたときに、変速後の予測負荷及び予測回転速度に基づいて算出される目標圧縮比に相当する。この目標瞬時圧縮比の算出では、目標負荷追従圧縮比算出部B1と同様の圧縮比マップ(図6参照)を用いてもよく、あるいは、目標瞬時圧縮比の算出用に個別に予め適合された専用の圧縮比マップを用いるようにしても良い。
【0027】
そして、目標圧縮比選択部B5では、上記の目標負荷追従圧縮比と目標瞬時圧縮比の一方を、目標圧縮比として選択・設定する。上述したように、基本的には現在の回転速度に応じた目標負荷追従圧縮比が選択され、急激なアップシフト側への変速を予測した場合にのみ、変速後の回転速度に応じた目標瞬時圧縮比が選択される。制御部11は、この目標圧縮比に基づいて電動機21へ指令値を出力し、可変圧縮比機構20を駆動制御する。
【0028】
このような目標圧縮比の設定処理のより具体的な内容について、図9〜図14のフローチャートを参照して説明する。図9を参照して、ステップS11では、車両運転状態を示す各種パラメータ、つまり車速VSP、ブレーキ踏力、アクセル開度APO、エンジン回転速度及び吸入空気量(吸気量)等を読み込む。ステップS12では、上記の回転速度予測部B2により予測回転速度を算出する。ステップS13では、上記の負荷予測部B3により予測負荷を算出する。ステップS14では、上記の目標瞬時圧縮比算出部B4により目標瞬時圧縮比を算出する。ステップS15では、上記の目標負荷追従圧縮比算出部B1により目標負荷追従圧縮比を算出する。ステップS16では、上記の目標圧縮比選択部B5により目標圧縮比を選択する。そして、ステップS17では、目標圧縮比と実圧縮比が一致又は所定値以下となるように、目標圧縮比へ向けて可変圧縮比機構20を駆動制御する。
【0029】
図10は上記ステップS12の回転速度予測処理の詳細を示すサブルーチンである。ステップS21では、車速VSPとアクセル開度APOに基づいて、変速後の予測変速比を求める。例えば、アクセル開度APOから変速後の充填効率を求め、この充填効率と車速VSPとにより図5に示すような変速マップをルックアップすることで、変速後の予測変速比を求める。ステップS22では、上記の予測変速比とファイナルギヤ比と車速と駆動輪のタイヤ径とに基づいて、変速後の予測回転速度を算出する。
【0030】
図11は、上記ステップS13の負荷予測処理を示すサブルーチンである。ステップS23では、アクセル開度APOと上記の予測回転速度とに基づいて、予め設定される予測吸入空気量マップを参照して、変速後の予測負荷を求める。
【0031】
図12は、上記ステップS14の目標瞬時圧縮比算出処理を示すサブルーチンである。ステップS24では、上記の予測負荷と予測回転速度とに基づいて、例えば図6に示すような目標圧縮比マップを参照して、変速後の予測回転速度に応じた目標瞬時圧縮比を求める。
【0032】
図13は、上記ステップS15の目標負荷追従圧縮比算出処理を示すサブルーチンである。ステップS25では、現在の負荷と現在の実回転速度とに基づいて、例えば図6に示すような目標圧縮比マップを参照して、現在の実回転速度に応じた目標負荷追従圧縮比を求める。
【0033】
図14は、上記ステップS16の目標圧縮比選択処理を示すサブルーチンである。ステップS31では、目標負荷追従圧縮比に対する目標瞬時圧縮比の低下量と比較される判定用の予め設定された第1所定値1(例えば、0.5)を読み込む。
【0034】
そして、ステップS32では、上記低下量が第1所定値1を超えているかを判定する。つまり、現在の実回転速度に応じた目標負荷追従圧縮比に対し、アップシフト側の変速による回転変動を見越した変速後の予測回転速度に応じた目標瞬時圧縮比の低下側への乖離が、第1所定値1よりも大きいかを判定する。
【0035】
上記低下量が第1所定値1を超える場合、つまりアップシフト側の変速による目標圧縮比の低下側への乖離が大きい場合には、ノッキング等の発生の懸念が生じるので、ステップS33へ進み、変速後の予測回転速度・予測変速比に応じた目標瞬時圧縮比を目標圧縮比として設定する。
【0036】
一方、低下量が第1所定値1以下の場合、つまり変速による目標圧縮比の低下側への乖離が小さい場合には、ノッキング等の発生の懸念がないと判断して、ステップS34へ進み、現在の実回転速度に応じた目標負荷追従圧縮比を目標圧縮比として設定する。
【0037】
つまり、この実施例においては、変速前後の目標圧縮比の低下量によってアップシフト側への急激な変速を予測しており、低下量が第1所定値1を超える場合には実圧縮比の低下遅れを伴うアップシフト側の変速を予測して、変速後の予測回転速度に応じた目標瞬時圧縮比を目標圧縮比として設定する。これによって、変速後の回転速度の急激な変動(低下)を見越した形で目標圧縮比が事前に低く設定され、ノッキング等の発生を確実に抑制・回避することができる。
【0038】
一方、上記の急なアップシフト変速以外の通常(定常)の運転状態においては、変速前後の目標圧縮比の低下量が第1所定値1を超えることはなく、現在の回転速度に応じた目標負荷追従圧縮比が目標圧縮比として設定される。従って、変速による回転変動を見越して目標圧縮比が不必要に低く設定されることがなく、低圧縮比化による燃焼効率の低下や燃費の低下を回避することができる。また、予測変速比として先読みした変速が実際には行われなかったときに、先読みした予測変速比に基づく圧縮比制御によって圧縮比が不用意に変動することもない。
【0039】
図15は、図7の比較例に対し、上記第1実施例の目標圧縮比の設定を用いた場合におけるアップシフト変速時のタイミングチャートを示している。図7の比較例と同様、タイミングt1において1速から3速、タイミングt2において3速から5速へのアップシフトが行われる。ここで本実施例においては、タイミングt1,t2よりも前のタイミングt1',t2'において、アップシフト側の変速が行われることを事前に予測し、変速後の予測回転速度に基づいて目標圧縮比が低く設定される。この結果、実際の変速後にエンジン回転速度が急激に低下したタイミングt3'においても、実圧縮比と目標圧縮比との乖離が十分に小さく抑えられ、実圧縮比の低下遅れによるノッキング等の発生を抑制・回避することができる。
【0040】
特に、この例のように、変速後半の3速から5速へのアップシフト時に、変速による回転速度の低下により圧縮比が13付近から10付近へ急激に大きく低下する場合に、実圧縮比の低下遅れを招き易く、本実施例の適用が極めて有効である。
【0041】
更に、図16を参照して説明すると、この可変圧縮比機構20は、高圧縮比側から低圧縮比側への変更が遅れると過渡的にノッキング等を生じるおそれがあるために、高圧縮比側での圧縮比変更速度が低圧縮比側での圧縮比変更速度よりも大きくなるように構成されている。具体的には、高圧縮比位置の設定では、低圧縮比位置の設定に比して、コントロールリンク26のリンク中心線と、コントロールシャフト27の回転中心と偏心軸部28の中心とを結ぶ偏心線と、のなす角度が直角に近くなり、モーメントの腕長さが大きくなって、電動機21(アクチュエータ)による駆動モーメントが大きくなり、ひいては変更速度が大きくなるように構成されている。このため、図15にも示すように、高圧縮比側では低圧縮比側に比して実圧縮比の変化速度(傾き)が大きくなっている。このようなことから、特に低圧縮比側への変速後半に実圧縮比の変更遅れを招き易く、本実施例の適用が極めて有効なものとなる。
【0042】
次に、本発明の第2実施例について、図17〜図19を参照して説明する。なお、以下の実施例では上述した第1実施例と異なる部分について主に説明し、共通する構成については重複する説明を適宜省略する。
【0043】
例えば、運転者による急なアクセル踏み離し操作のように、車両運転者の操作速度が大きい場合には、その後の変速による回転速度の変動も急激なものとなり易く、圧縮比の応答遅れを招き易い。そこでこの第2実施例においては、変速予測時に、車両運転者の操作速度に相当するアクセル離し速度ΔAPOが大きくなるほど予測変速比が小さくなるように、操作速度に基づいて変速後の予測変速比(第2予測変速比)を算出している。
【0044】
図17は、予測回転速度の算出処理のサブルーチンであり、第1実施例における図10の予測回転速度の算出処理のサブルーチンに相当するものである。ステップS41では、図10のステップS21と同様、アクセル開度APOと車速VSPとに基づいて、変速後の第1予測変速比を求める。例えば、アクセル開度APOから充填効率を求め、この充填効率と車速VSPから図5に示す変速マップを参照して第1予測変速比を求める。
【0045】
ステップS42では、アクセルペダルの踏み離し速度(アクセル離し速度)ΔAPOと車速VSPとに基づいて、図18に示すような予測変速テーブルを参照して、アップシフト側への変速後の第2予測変速比を求める。ここで、アクセル離し速度ΔAPOは、ここでは一演算前(例えば、10ms前)のアクセル開度APO(t−Δt)に対する現在のアクセル開度APO(t)の低下量として求めている。この第2予測変速比は、アクセル開度APO(あるいは、吸入空気量)に基づいて算出される第1予測変速比に対し、更に小変速比側(高速段側)への変速を先読みした値として求められるものであり、アクセル離し速度ΔAPOが大きくなるほど小変速比側(高速段側)の値とされ、少なくとも第1予測変速比よりも小さな値とされる。
【0046】
ステップS43では、第1予測変速比に対する第2予測変速比の低下量が、予め設定される所定の第2所定値2を超えているかを判定する。上記の低下量が第2所定値2を超えていれば、急なアクセル踏み離しによるアップシフトであると判断して、ステップS44へ進み、アクセル離し速度ΔAPOに基づく第2予測変速比を予測変速比として設定する。一方、低下量が第2所定値2以下であれば、急なアップシフトによる変速が行われることはない判断して、ステップS45へ進み、上記の第1実施例と同様、アクセル開度APOと車速VSPに基づく第1予測変速比を予測変速比として設定する。ステップS46では、図7のステップS22と同様、選択された予測変速比とファイナルギヤ比と車速と駆動輪のタイヤ径とに基づいて、変速後の予測回転速度を算出する。この予測回転速度に基づいて第1実施例と同様に目標瞬時圧縮比が算出されることとなる。
【0047】
図19は、このような第2実施例を適用した場合のアップシフト変速時のタイミングチャートである。図15に示す第1実施例においては、減速開始タイミングt0の直後のタイミングt1'において、アクセル開度APOに基づいて1速から3速への変速を予測しているのに対し、この第2実施例においては、同じタイミングt1'において、アクセル離し速度ΔAPOが第2所定値2を超えている場合には、上記の第2予測変速比により1速から5速への変速を予測しており、つまり5速までの変速を更に先読みしたものとなっている。このため、このタイミングt1'から最終的な5速への変速を見越した形で目標圧縮比が更に低下側に設定されることとなり、上記第1実施例よりも更に確実にノッキング等の発生を抑制・回避することができる。
【0048】
次に、図20を参照して本発明の第3実施例を説明する。この第3実施例では、第1実施例における図14の目標圧縮比選択処理を示すサブルーチンに代えて、図20の目標圧縮比及び変速比の選択処理のサブルーチンを用いている。
【0049】
この第3実施例においては、アップシフト変速を予測したときに、目標圧縮比の低下に加えて、必要に応じて変速比の制限・補正をも行うものである。ステップS51,S52及びS57は、第1実施例におけるステップS31,S32及びS34と同様の処理である。つまり、ステップS51では、目標負荷追従圧縮比に対する目標瞬時圧縮比の低下量と比較される第3所定値3(例えば、0.5)を読み込む。この第3所定値3は、第1実施例の第1所定値1に相当するものである。ステップS52では、上記の低下量が第3所定値3を超えているかを判定する。低下量が第3所定値3以下の場合、つまり変速前後の目標圧縮比の乖離が小さい場合には、ノッキング等の発生の懸念がないと判断して、ステップS57へ進み、現在の実回転速度に応じた目標負荷追従圧縮比を目標圧縮比として設定する。
【0050】
一方、低下量が第3所定値3を超えていれば、ステップS53へ進み、この低下量が、上記の第3所定値3よりも更に大きな値(例えば、1.0)である第4所定値4を超えているかを判定する。この第4所定値4は、変速前後の目標圧縮比の低下量の上限値に相当するものである。低下量が所定値を超えていなければ、ステップS56へ進み、上記の第1実施例と同様、変速後の予測回転速度に応じた目標瞬時圧縮比を目標圧縮比として選択・設定する。
【0051】
一方、目標圧縮比の低下量が第4所定値4を超えていれば、ステップS54へ進み、目標瞬時圧縮比ではなく、目標負荷追従圧縮比から第4所定値4を差し引いた値を目標圧縮比として設定する。つまり、目標圧縮比の低下量を第4所定値4に制限して、過度な目標圧縮比の低下を抑制し、これによる運転性の低下や圧縮比の変動を抑制している。
【0052】
そして、ステップS55では、ノッキング等を生じることのないように、変速比(変速段)を補正・制限する。具体的には、上記のステップS54で設定された目標圧縮比に基づいて、ノッキング等を生じることのない回転速度の下限値に相当する許可回転速度を求め、この許可回転速度に基づいて、ノッキング等を生じることのない変速比の最小値に相当する許可変速比を求める。具体的には、許可回転速度とファイナルギヤ比と車速VSPとタイヤ径とから許可変速比を求める。そして、この許可変速比に変速比を制限する。つまり、ステップS54において目標圧縮比の低下量を第4所定値4に抑えたことで、ノッキング等の発生を防ぎきれない場合には、アップシフト側への変速を低速段側に制限する。例えば、3速から5速へ変速する状況で、3速から4速へのアップシフトに制限する。これによって、アップシフトによる回転速度の低下が抑制され、回転速度の低下に対する実圧縮比の低下の遅れが緩和され、ひいては目標圧縮比の過度な低下を回避しつつ、変速比の制限によりノッキング等の発生を抑制・回避することができる。
【0053】
以上のように本発明を具体的な実施例に基づいて説明してきたが、本発明は上記実施例に限定されるものではなく、その趣旨を逸脱しない範囲で種々の変形・変更を含むものである。例えば、上記実施例では車両変速機として有段変速機を用いているが、CVT等の無段変速機に適用することも可能である。この場合、変速段を細分化して擬似的に変速段を実現すればよい。また、アクセル開度APOに代えて、このアクセル開度APOに相当するスロットル開度TVOを用いて制御を行うようにしても良い。更に、アップシフトを生じる状況としては、上述したようなアクセルペダルの急な踏み離し操作時に限らず、急ブレーキによる急減速時などが挙げられる。
【符号の説明】
【0054】
11…制御部
20…可変圧縮比機構
40…車両変速機
B1…目標負荷追従圧縮比算出部(第1目標圧縮比設定手段)
B2…回転速度予測部(第2目標圧縮比設定手段)
B3…負荷予測部(第2目標圧縮比設定手段)
B4…目標瞬時圧縮比算出部(第2目標圧縮比設定手段)
B5…目標圧縮比選択部(第1目標圧縮比設定手段、第2目標圧縮比設定手段)
【特許請求の範囲】
【請求項1】
機関圧縮比を変更可能な可変圧縮比機構を備えたエンジンの出力を変速機を介して駆動輪に伝達する車両の制御装置において、
目標圧縮比へ向けて上記可変圧縮比機構を駆動制御する圧縮比制御手段と、
上記エンジンの実回転速度を検出する回転速度検出手段と、
上記実回転速度に基づいて算出される第1目標圧縮比を上記目標圧縮比として設定する第1目標圧縮比設定手段と、
車両運転者の操作に基づいて、上記変速機における変速比の大から小への変速を予測した変速予測時に、実回転速度に基づく上記第1目標圧縮比より小さな第2目標圧縮比を上記目標圧縮比として設定する第2目標圧縮比設定手段と、を有する、
ことを特徴とする車両の制御装置。
【請求項2】
機関圧縮比を変更可能な可変圧縮比機構を備えたエンジンの出力を変速機を介して駆動輪に伝達する車両の制御装置において、
目標圧縮比へ向けて上記可変圧縮比機構を駆動制御する圧縮比制御手段と、
上記エンジンの実回転速度を検出する回転速度検出手段と、
上記実回転速度に基づいて算出される第1目標圧縮比を上記目標圧縮比として設定する第1目標圧縮比設定手段と、
車両運転者の操作に基づいて、上記変速機における変速比の大から小への変速を予測した変速予測時に、第2目標圧縮比を上記目標圧縮比として設定する第2目標圧縮比設定手段と、を有し、
この第2目標圧縮比設定手段は、
上記車両運転者の操作に基づいて変速後の予測変速比を算出し、
この予測変速比に基づいて変速後のエンジンの予測回転速度を算出し、
この予測回転速度に基づいて上記第2目標圧縮比を算出する、
ことを特徴とする車両の制御装置。
【請求項3】
上記第2目標圧縮比設定手段は、上記第1目標圧縮比に対する第2目標圧縮比の低下量が所定値を超える場合に、上記第2目標圧縮比を目標圧縮比として設定することを特徴とする請求項2に記載の車両の制御装置。
【請求項4】
上記第2目標圧縮比設定手段は、上記変速予測時における車両運転者の操作速度が大きくなるほど上記予測変速比が小さくなるように、上記操作速度に基づいて予測変速比を算出することを特徴とする請求項2又は3車両の制御装置。
【請求項5】
上記第1目標圧縮比は上記実回転速度の低下に伴って低下するように第1目標圧縮比設定手段により設定され、
上記第2目標圧縮比設定手段は、上記変速予測時における第2目標圧縮比を第1目標圧縮比よりも低い値とすることを特徴とする請求項2〜4のいずれかに記載の車両の制御装置。
【請求項6】
上記可変圧縮比機構は、高圧縮比側での圧縮比変更速度が低圧縮比側での圧縮比変更速度よりも大きくなるように構成されていることを特徴とする請求項2〜5のいずれかに記載の車両の制御装置。
【請求項7】
エンジンの実吸入空気量と車速とに基づいて変速比を設定する変速比設定手段と、
上記変速予測時に、上記変速比を大側へ補正する変速比補正手段と、
を有することを特徴とする請求項2〜6のいずれかに記載の車両の制御装置。
【請求項1】
機関圧縮比を変更可能な可変圧縮比機構を備えたエンジンの出力を変速機を介して駆動輪に伝達する車両の制御装置において、
目標圧縮比へ向けて上記可変圧縮比機構を駆動制御する圧縮比制御手段と、
上記エンジンの実回転速度を検出する回転速度検出手段と、
上記実回転速度に基づいて算出される第1目標圧縮比を上記目標圧縮比として設定する第1目標圧縮比設定手段と、
車両運転者の操作に基づいて、上記変速機における変速比の大から小への変速を予測した変速予測時に、実回転速度に基づく上記第1目標圧縮比より小さな第2目標圧縮比を上記目標圧縮比として設定する第2目標圧縮比設定手段と、を有する、
ことを特徴とする車両の制御装置。
【請求項2】
機関圧縮比を変更可能な可変圧縮比機構を備えたエンジンの出力を変速機を介して駆動輪に伝達する車両の制御装置において、
目標圧縮比へ向けて上記可変圧縮比機構を駆動制御する圧縮比制御手段と、
上記エンジンの実回転速度を検出する回転速度検出手段と、
上記実回転速度に基づいて算出される第1目標圧縮比を上記目標圧縮比として設定する第1目標圧縮比設定手段と、
車両運転者の操作に基づいて、上記変速機における変速比の大から小への変速を予測した変速予測時に、第2目標圧縮比を上記目標圧縮比として設定する第2目標圧縮比設定手段と、を有し、
この第2目標圧縮比設定手段は、
上記車両運転者の操作に基づいて変速後の予測変速比を算出し、
この予測変速比に基づいて変速後のエンジンの予測回転速度を算出し、
この予測回転速度に基づいて上記第2目標圧縮比を算出する、
ことを特徴とする車両の制御装置。
【請求項3】
上記第2目標圧縮比設定手段は、上記第1目標圧縮比に対する第2目標圧縮比の低下量が所定値を超える場合に、上記第2目標圧縮比を目標圧縮比として設定することを特徴とする請求項2に記載の車両の制御装置。
【請求項4】
上記第2目標圧縮比設定手段は、上記変速予測時における車両運転者の操作速度が大きくなるほど上記予測変速比が小さくなるように、上記操作速度に基づいて予測変速比を算出することを特徴とする請求項2又は3車両の制御装置。
【請求項5】
上記第1目標圧縮比は上記実回転速度の低下に伴って低下するように第1目標圧縮比設定手段により設定され、
上記第2目標圧縮比設定手段は、上記変速予測時における第2目標圧縮比を第1目標圧縮比よりも低い値とすることを特徴とする請求項2〜4のいずれかに記載の車両の制御装置。
【請求項6】
上記可変圧縮比機構は、高圧縮比側での圧縮比変更速度が低圧縮比側での圧縮比変更速度よりも大きくなるように構成されていることを特徴とする請求項2〜5のいずれかに記載の車両の制御装置。
【請求項7】
エンジンの実吸入空気量と車速とに基づいて変速比を設定する変速比設定手段と、
上記変速予測時に、上記変速比を大側へ補正する変速比補正手段と、
を有することを特徴とする請求項2〜6のいずれかに記載の車両の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2012−57514(P2012−57514A)
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願番号】特願2010−200425(P2010−200425)
【出願日】平成22年9月8日(2010.9.8)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願日】平成22年9月8日(2010.9.8)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]