
車両の制御装置
【課題】登坂路での発進時の駆動力を確保しながら、燃費の改善を図る。
【解決手段】路面勾配が大きいほど車両停止時の目標変速比(目標入力回転数Nint)を大きい側に設定しているので、平坦路や緩やかな登坂路のように路面勾配が小さい場合には変速タイミング(L/U−off車速Vs0,Vs1)を遅らすことができる。これによって変速比をHi側に維持できる範囲を広げることが可能となり、燃費の改善を図ることができる。また、急登坂路などの路面勾配が大きい場合には、車両停止時の変速比を最大変速比γmaxにすることで車両発進時の駆動力を確保することができるので、登坂路での発進時の駆動力を確保しながら、燃費の改善を図ることが可能になる。
【解決手段】路面勾配が大きいほど車両停止時の目標変速比(目標入力回転数Nint)を大きい側に設定しているので、平坦路や緩やかな登坂路のように路面勾配が小さい場合には変速タイミング(L/U−off車速Vs0,Vs1)を遅らすことができる。これによって変速比をHi側に維持できる範囲を広げることが可能となり、燃費の改善を図ることができる。また、急登坂路などの路面勾配が大きい場合には、車両停止時の変速比を最大変速比γmaxにすることで車両発進時の駆動力を確保することができるので、登坂路での発進時の駆動力を確保しながら、燃費の改善を図ることが可能になる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジン及び自動変速機が搭載された車両の制御装置に関する。
【背景技術】
【0002】
エンジン(内燃機関)を搭載した車両において、エンジンが発生するトルク及び回転速度を車両の走行状態に応じて適切に駆動輪に伝達する変速機として、エンジンと駆動輪との間の変速比を自動的に最適設定する自動変速機が知られている。車両に搭載される自動変速機としては、例えば、クラッチやブレーキなどの摩擦係合要素と遊星歯車装置とを用いて変速比(ギヤ比)を設定する遊星歯車式変速機や、変速比を無段階に調整するベルト式の無段変速機(CVT:Continuously Variable Transmission)がある。
【0003】
車両に搭載される無段変速機においては、例えば、アクセルペダルの踏み込み量に代表される駆動要求量、エンジン回転数や車速などの車両状態に基づいて目標入力回転数(目標変速比)を設定し、その目標入力回転数(目標変速比)と実際の入力回転数(実際の変速比)との偏差に基づくフィードバック制御によって変速比を制御している。
【0004】
また、この種の自動変速機が搭載された車両においては、エンジンと自動変速機との間にフルードカップリングやトルクコンバータなどの流体伝動装置が配設されている。さらに、この流体伝動装置として、ロックアップクラッチを備えたものが知られている(例えば、特許文献1参照)。ロックアップクラッチは、作動油(ATF)の油圧によって摩擦係合することにより、流体伝動装置の入力側と出力側とを直結可能とするものである。
【0005】
このようなロックアップクラッチ付きの流体伝動装置が搭載された車両においては、例えば、自動変速機の油圧制御を含む油圧制御系の油圧(ライン圧)を元圧として、ロックアップクラッチに作用させる油圧を制御することによって、ロックアップクラッチの係合状態・半係合状態・解放状態を制御している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−014189号公報
【特許文献2】特開2006−144843号公報
【特許文献3】特開2003−254108号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、車両に搭載される無段変速機においては、車両停止時(0km/h)に次回の車両発進に備えて変速比を最大変速比γmaxで停車できるように、車両減速時に所定車速を下回ると変速比を大きい側(Lo側)に変速している。この制御の目的は登坂路での駆動力確保であり、その制御時の目標エンジン回転数(目標入力回転数)は油圧の応答性を考慮し、車両停止までに変速比を最大変速比γmaxまで変速できるように設定されている。ここで、最大変速比γmaxまでの変速に必要な油圧を確保するには油圧オイルポンプ(エンジン駆動のオイルポンプ)の仕事量を多くする必要があって燃料消費率(燃費)が低下することから、平坦路や路面勾配が小さい走行路の場合(登坂路ほどの発進駆動力を確保する必要がない場合)に、最大変速比γmaxへの変速を行うと燃費の低下が懸念される。
【0008】
本発明はそのような実情を考慮してなされたもので、登坂路での発進時の駆動力を確保しながら、燃費の改善を図ることが可能な車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、エンジン及び自動変速機と、前記エンジンと自動変速機(例えば無段変速機)との間に配設された流体伝動装置(例えばトルクコンバータ)と、前記流体伝動装置の入力側と出力側とを直結するロックアップクラッチとが搭載された車両に適用され、所定車速を下回った場合に前記ロックアップクラッチを解放し、車両停止時までの間に前記自動変速機の変速比を大きい側(Lo側)に変速する制御が実行可能な車両の制御装置を前提としており、このような車両の制御装置において、路面勾配が正方向に大きいほど車両停止時の目標変速比を大きい側(Lo側)に設定することを技術的特徴としている。
【0010】
本発明によれば、路面勾配が大きいほど車両停止時の目標変速比を大きい側(Lo側)に設定しているので、路面勾配が小さい場合は大きい場合と比較して車両停止時の目標変速比を小さくすることができる。これにより路面勾配が小さい場合(平坦路や緩やかな登坂路の場合)には、車両減速時においてHi側の変速比で走行できる範囲を広げることができる。すなわち、従来制御では、路面勾配の大きさに関係なく、車両停止時の目標変速比を最大変速比γmaxに設定しているので、平坦路等においても急登坂路と同様なタイミングで変速比をHi側からLo側に変速している。これに対し、上述の如く路面勾配が小さい場合は大きい場合と比較して車両停止時の目標変速比を小さくすることにより、平坦路や緩やかな登坂路の場合には変速タイミングを遅らすことができ、車両減速時において変速比をHi側に維持できる範囲を広げることができる。このように変速比をHi側に維持できる範囲が広がることにより燃費の改善を図ることができる。また、本発明では、急登坂路などの路面勾配が大きい場合には、車両停止時の目標変速比を最大変速比γmaxにすることで車両発進時の駆動力を確保することができる。このように、本発明によれば、登坂路での発進時の駆動力を確保しながら、燃費の改善を図ることができる。
【0011】
本発明において、路面勾配が正方向に大きいほど、車両減速時においてロックアップクラッチを解放する車速(L/U−off車速)を高く設定するようにしてもよい。このように路面勾配が大きいほどロックアップクラッチを解放する車速を高く設定すること、つまり、路面勾配が小さいほどロックアップクラッチを開放する車速を低くすることによって、路面勾配が小さい場合にはフューエルカット領域を拡大することが可能になるので、燃費をより効果的に向上させることができる。
【0012】
本発明において、車両停止時の自動変速機(無段変速機)の実変速比が目標変速比よりも小さい場合は、その実変速比と目標変速比との差に応じて車両発進時のエンジンの駆動力を増大させるようにしてもよい。このように、車両停止時に自動変速機の実変速比が目標変速比まで戻らない場合は、その変速戻り不足分に相当するエンジン駆動力(具体的にはスロットル開度)を増大させることにより、車両発進時の駆動力を十分に確保することが可能になるので、ドライバのフィーリング(ドライバビリティ)が損なわれることがなくなる。
【0013】
本発明において、油圧式の自動変速機と電動オイルポンプとを備えさせ、目標変速比への変速時に油圧が不足する場合には、電動オイルポンプの作動により油圧を増大させるという構成を採用してもよい。このように電動オイルポンプの作動(EOPアシスト実行)により油圧を増大させることによって、エンジンにて駆動されるオイルポンプでは油圧が不足する場合あっても、その油圧不足分を補うことができるので、車両停止時の自動変速機の実変速比を目標変速比にまで確実に変速することが可能になる。
【0014】
本発明において、油圧式の自動変速機と電動オイルポンプとを備えさせ、車両減速時に電動オイルポンプを作動して、ロックアップクラッチを解放する車速を低い側に設定するという構成を採用してもよい。このようにエンジンにて駆動されるオイルポンプに加えて電動オイルポンプを作動することにより、自動変速機の変速制御用の油圧がアップし、その油圧アップに相当する分だけHi側からLo側への変速速度が速くなるので、ロックアップクラッチを開放する車速(L/U−off車速)を低速側に設定することができる。これによって燃費の向上を図ることができる。
【発明の効果】
【0015】
本発明によれば、路面勾配が大きいほど車両停止時の目標変速比を大きい側に設定しているので、登坂路での発進時の駆動力を確保しながら、燃費の改善を図ることができる。
【図面の簡単な説明】
【0016】
【図1】本発明を適用する車両の一例を示す概略構成図である。
【図2】油圧制御回路のうちベルト式無段変速機のプライマリプーリの油圧アクチュエータを制御する油圧制御回路の回路構成図である。
【図3】油圧制御回路のうちベルト式無段変速機のベルトの挟圧力を制御する油圧制御回路の回路構成図である。
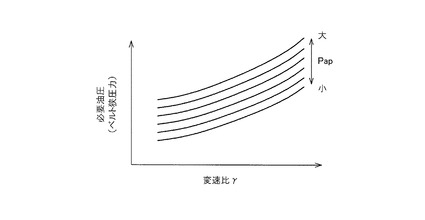
【図4】ベルト式無段変速機の変速制御に用いるマップの一例を示す図である。
【図5】ベルト式無段変速機のベルト挟圧力制御に用いるマップの一例を示す図である。
【図6】ロックアップクラッチを係合・解放制御するロックアップ制御回路ロックアップ制御回路の回路構成図である。
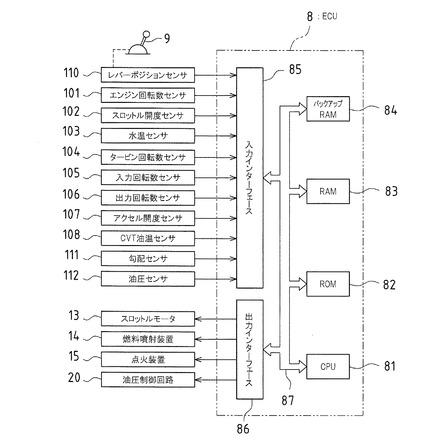
【図7】ECU等の制御系の構成を示すブロック図である。
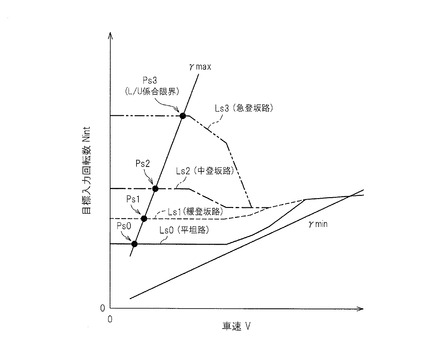
【図8】コースト走行時(減速走行時)の変速制御に用いるマップの一例を示す図である。
【図9】車両停止時の制御の一例を示すフローチャートである。
【図10】車両停止時の制御の一例を示すフローチャートである。
【図11】駆動力補正制御の一例を示すフローチャートである。
【図12】スロットル開度補正量の算出に用いるマップの一例を示す図である。
【図13】EOPアシスト制御の一例を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態を図面に基づいて説明する。
【0018】
図1は本発明を適用する車両の一例を示す概略構成図である。
【0019】
この例の車両は、FF(フロントエンジン・フロントドライブ)型車両であって、走行用動力源であるエンジン(内燃機関)1、流体伝動装置としてのトルクコンバータ2、前後進切替装置3、ベルト式無段変速機(CVT)4、減速歯車装置5、差動歯車装置6、及び、ECU8などが搭載されており、そのECU8により実行されるプログラムによって本発明の車両の制御装置が実現される。
【0020】
エンジン1の出力軸であるクランクシャフト11はトルクコンバータ2に連結されており、エンジン1の出力が、トルクコンバータ2から前後進切替装置3、ベルト式無段変速機4及び減速歯車装置5を介して差動歯車装置6に伝達され、左右の駆動輪7へ分配される。これらエンジン1、トルクコンバータ2、前後進切替装置3、ベルト式無段変速機4、及び、ECU8の各部について以下に説明する。
【0021】
−エンジン−
エンジン1は、例えば多気筒ガソリンエンジンである。エンジン1に吸入される吸入空気量は電子制御式のスロットルバルブ12により調整される。スロットルバルブ12は運転者のアクセルペダル操作とは独立してスロットル開度を電子的に制御することが可能であり、その開度(スロットル開度)はスロットル開度センサ102によって検出される。また、エンジン1の冷却水温は水温センサ103によって検出される。
【0022】
スロットルバルブ12のスロットル開度はECU8によって駆動制御される。具体的には、エンジン回転数センサ101によって検出されるエンジン回転数Ne、及び、運転者のアクセルペダル踏み込み量(アクセル操作量Pap)等のエンジン1の運転状態に応じた最適な吸入空気量(目標吸気量)が得られるようにスロットルバルブ12のスロットル開度を制御している。より詳細には、スロットル開度センサ102を用いてスロットルバルブ12の実際のスロットル開度を検出し、その実スロットル開度が、上記目標吸気量が得られるスロットル開度(目標スロットル開度)に一致するようにスロットルバルブ12のスロットルモータ13をフィードバック制御している。
【0023】
−トルクコンバータ−
トルクコンバータ2は、図1に示すように、入力側のポンプインペラ21、出力側のタービンランナ22、及び、トルク増幅機能を発現するステータ23などを備えており、ポンプインペラ21とタービンランナ22との間で流体(作動油)を介して動力伝達を行う流体伝動装置である。ポンプインペラ21はエンジン1のクランクシャフト11に連結されている。タービンランナ22はタービンシャフト27を介して前後進切替装置3に連結されている。
【0024】
トルクコンバータ2には、当該トルクコンバータ2の入力側と出力側とを直結するロックアップクラッチ24が設けられている。ロックアップクラッチ24は、係合側油室25内の油圧と解放側油室26内の油圧との差圧(ロックアップ差圧)を制御することにより完全係合・半係合(スリップ状態での係合)または解放される。
【0025】
ロックアップクラッチ24を完全係合させることにより、ポンプインペラ21とタービンランナ22とが一体回転する。また、ロックアップクラッチ24を所定のスリップ状態(半係合状態)で係合させることにより、駆動時には所定のスリップ量でタービンランナ22がポンプインペラ21に追随して回転する。一方、ロックアップ差圧を負に設定することによりロックアップクラッチ24は解放状態となる。このロックアップクラッチ24の係合または解放は、ECU8及び油圧制御回路20によって制御される。
【0026】
そして、トルクコンバータ2にはポンプインペラ21に連結して駆動される機械式のオイルポンプ(油圧発生源)10が設けられている。このオイルポンプ10はエンジン1によって駆動される。
【0027】
−前後進切替装置−
前後進切替装置3は、図1に示すように、ダブルピニオン型の遊星歯車機構30、フォワードクラッチ(前進用クラッチ)C1及びリバースブレーキ(後進用ブレーキ)B1を備えている。
【0028】
遊星歯車機構30のサンギヤ31はトルクコンバータ2のタービンシャフト27に一体的に連結されており、キャリア33はベルト式無段変速機4の入力軸40に一体的に連結されている。これらキャリア33とサンギヤ31とはフォワードクラッチC1を介して選択的に連結されている。また、リングギヤ32はリバースブレーキB1を介してハウジング300に選択的に固定されるようになっている。
【0029】
フォワードクラッチC1及びリバースブレーキB1は、油圧制御回路20によって係合・解放される油圧式の摩擦係合装置であって、フォワードクラッチC1が係合され、リバースブレーキB1が解放されることにより、前後進切替装置3が一体回転状態となって前進用動力伝達経路が成立(達成)し、この状態で、前進方向の駆動力がベルト式無段変速機4側へ伝達される。
【0030】
一方、リバースブレーキB1が係合され、フォワードクラッチC1が解放されると、前後進切替装置3によって後進用動力伝達経路が成立(達成)する。この状態で、ベルト式無段変速機4の入力軸40がタービンシャフト27に対して逆方向へ回転し、この後進方向の駆動力がベルト式無段変速機4側へ伝達される。また、フォワードクラッチC1及びリバースブレーキB1がともに解放されると、前後進切替装置3は動力伝達を遮断するニュートラル(遮断状態)になる。
【0031】
−ベルト式無段変速機−
ベルト式無段変速機4は、図1に示すように、入力側のプライマリプーリ41、出力側のセカンダリプーリ42、及び、これらプライマリプーリ41とセカンダリプーリ42とに巻き掛けられた金属製のベルト43などを備えている。
【0032】
プライマリプーリ41は、有効径が可変な可変プーリであって、入力軸40に固定された固定シーブ411と、入力軸40に軸方向のみの摺動が可能な状態で配設された可動シーブ412とによって構成されている。セカンダリプーリ42も同様に有効径が可変な可変プーリであって、出力軸44に固定された固定シーブ421と、出力軸44に軸方向のみの摺動が可能な状態で配設された可動シーブ422とによって構成されている。
【0033】
プライマリプーリ41の可動シーブ412側には、固定シーブ411と可動シーブ412との間のV溝幅を変更するための油圧アクチュエータ413が配置されている。また、セカンダリプーリ42の可動シーブ422側にも同様に、固定シーブ421と可動シーブ422との間のV溝幅を変更するための油圧アクチュエータ423が配置されている。
【0034】
以上の構造のベルト式無段変速機4において、プライマリプーリ41の油圧アクチュエータ413の油圧を制御することにより、プライマリプーリ41及びセカンダリプーリ42の各V溝幅が変化してベルト43の掛かり径(有効径)が変更され、変速比γ(γ=入力軸回転数(プライマリプーリ回転数)Nin/出力回転数(セカンダリプーリ回転数)Nout)が連続的に変化する。また、セカンダリプーリ42の油圧アクチュエータ423の油圧は、ベルト滑りが生じない所定の挟圧力でベルト43が挟圧されるように制御される。これらの制御はECU8及び油圧制御回路20によって実行される。
【0035】
−油圧制御回路−
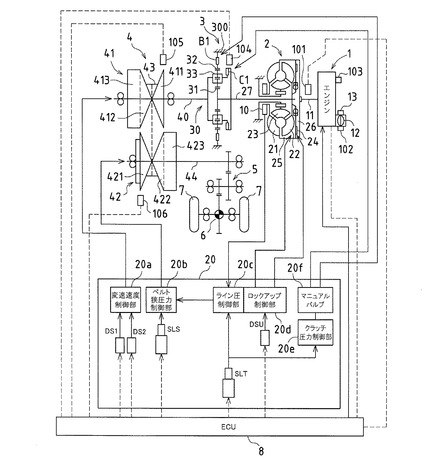
油圧制御回路20は、図1に示すように、変速速度制御部20a、ベルト挟圧力制御部20b、ライン圧制御部20c、ロックアップクラッチ24の係合(完全係合及び半係合)または解放を制御するロックアップ制御部20d、前後進切替装置3のフォワードクラッチC1及びリバースブレーキB1の係合または解放を制御するクラッチ圧力制御部20e、並びに、マニュアルバルブ20fなどを備えている。なお、クラッチ圧力制御部20eには、リニアソレノイドバルブSLTにて制御されたライン圧が供給される。
【0036】
また、油圧制御回路20を構成する変速速度制御用の変速制御ソレノイドバルブDS1及び変速制御ソレノイドバルブDS2、ベルト挟圧力制御用のリニアソレノイドバルブSLS、ライン圧制御用のリニアソレノイドバルブSLT、並びに、ロックアップ係合圧制御用のデューティソレノイドバルブDSUにはECU8からの制御信号が供給される。
【0037】
次に、油圧制御回路20のうち、ベルト式無段変速機4のプライマリプーリ41の油圧アクチュエータ413の油圧制御回路(変速速度制御部20aの具体的な油圧回路構成)、及び、セカンダリプーリ42の油圧アクチュエータ423の油圧制御回路(ベルト挟圧力制御部20bの具体的な油圧回路構成)について、図2及び図3を参照して説明する。
【0038】
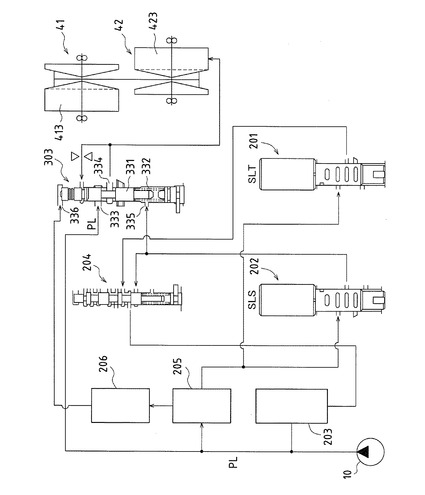
まず、図3に示すように、オイルポンプ10が発生した油圧はプライマリレギュレータバルブ203により調圧されてライン圧PLが生成される。プライマリレギュレータバルブ203には、リニアソレノイドバルブ(SLT)201が出力する制御油圧がクラッチアプライコントロールバルブ204を介して供給され、その制御油圧をパイロット圧として作動する。
【0039】
なお、クラッチアプライコントロールバルブ204の切り替えにより、リニアソレノイドバルブ(SLS)202からの制御油圧がプライマリレギュレータバルブ203に供給され、その制御油圧をパイロット圧としてライン圧PLが調圧される場合もある。これらリニアソレノイドバルブ(SLT)201及びリニアソレノイドバルブ(SLS)202には、ライン圧PLを元圧としてモジュレータバルブ205にて調圧された油圧が供給される。
【0040】
リニアソレノイドバルブ(SLT)201は、ECU8が出力するDuty信号によって決まる電流値に応じて制御油圧を出力する。リニアソレノイドバルブ(SLT)201はノーマルオープンタイプのソレノイドバルブである。
【0041】
また、リニアソレノイドバルブ(SLS)202は、ECU8が出力するDuty信号によって決まる電流値に応じて制御油圧を出力する。このリニアソレノイドバルブ(SLS)202も上記リニアソレノイドバルブ(SLT)201と同様にノーマルオープンタイプのソレノイドバルブである。
【0042】
なお、図2及び図3に示す油圧制御回路において、モジュレータバルブ206は、上記モジュレータバルブ205が出力する油圧を一定の圧力に調圧して、後述する変速制御ソレノイドバルブ(DS1)304、変速制御ソレノイドバルブ(DS2)305、及び、ベルト挟圧力制御バルブ303などに供給する。
【0043】
[変速制御]
次に、プライマリプーリ41の油圧アクチュエータ413の油圧制御回路について説明する。図2に示すように、プライマリプーリ41の油圧アクチュエータ413にはアップシフト用変速制御バルブ301が接続されている。
【0044】
アップシフト用変速制御バルブ301には、バルブボディ内において軸方向に移動可能なスプール弁子311が設けられている。スプール弁子311の一端側(図2の上端側)にはスプリング(圧縮コイルばね)312が配置されており、このスプール弁子311を挟んでスプリング312とは反対側の端部に、第1油圧ポート315が形成されている。また、スプリング312が配置されている上記の一端側に第2油圧ポート316が形成されている。
【0045】
第1油圧ポート315には、ECU8が出力するDuty信号(DS1変速Duty(アップシフトDuty))によって決まる電流値に応じて制御油圧を出力する変速制御ソレノイドバルブ(DS1)304が接続されており、その変速制御ソレノイドバルブ(DS1)304が出力する制御油圧が第1油圧ポート315に印加される。第2油圧ポート316には、ECU8が出力するDuty信号(DS2変速Duty(ダウンシフトDuty))によって決まる電流値に応じて制御油圧を出力する変速制御ソレノイドバルブ(DS2)305が接続されており、その変速制御ソレノイドバルブ(DS2)305が出力する制御油圧が第2油圧ポート316に印加される。
【0046】
さらに、アップシフト用変速制御バルブ301には、ライン圧PLが供給される入力ポート313、プライマリプーリ41の油圧アクチュエータ413に接続(連通)される入出力ポート314及び出力ポート317が形成されており、スプール弁子311がアップシフト位置(図2の右側位置)にあるときには、出力ポート317が閉鎖され、ライン圧PLが入力ポート313から入出力ポート314を経てプライマリプーリ41の油圧アクチュエータ413に供給される。一方、スプール弁子311が閉じ位置(図2の左側位置)にあるときには、入力ポート313が閉鎖され、プライマリプーリ41の油圧アクチュエータ413が入出力ポート314を介して出力ポート317に連通する。
【0047】
ダウンシフト用変速制御バルブ302には、バルブボディ内において軸方向に移動可能なスプール弁子321が設けられている。スプール弁子321の一端側(図2の下端側)にはスプリング(圧縮コイルばね)322が配置されているとともに、その一端側に第1油圧ポート326が形成されている。また、スプール弁子321を挟んでスプリング322とは反対側の端部に第2油圧ポート327が形成されている。第1油圧ポート326には、上記変速制御ソレノイドバルブ(DS1)304が接続されており、その変速制御ソレノイドバルブ(DS1)304が出力する制御油圧が第1油圧ポート326に印加される。第2油圧ポート327には、上記変速制御ソレノイドバルブ(DS2)305が接続されており、その変速制御ソレノイドバルブ(DS2)305が出力する制御油圧が第2油圧ポート327に印加される。
【0048】
さらに、ダウンシフト用変速制御バルブ302には、入力ポート323、入出力ポート324及び排出ポート325が形成されている。入力ポート323にはバイパスコントロールバルブ306が接続されており、そのバイパスコントロールバルブ306にてライン圧PLを調圧した油圧が供給される。そして、このようなダウンシフト用変速制御バルブ302において、スプール弁子321がダウンシフト位置(図2の左側位置)にあるときには入出力ポート324が排出ポート325に連通する。一方、スプール弁子321が閉じ位置(図2の右側位置)にあるときには入出力ポート324が閉鎖される。なお、ダウンシフト用変速制御バルブ302の入出力ポート324は、アップシフト用変速制御バルブ301の出力ポート317に接続されている。
【0049】
以上の図2の油圧制御回路において、ECU8が出力するDS1変速Duty(アップシフト変速指令)に応じて変速制御ソレノイドバルブ(DS1)304が作動し、その変速制御ソレノイドバルブ(DS1)304が出力する制御油圧がアップシフト用変速制御バルブ301の第1油圧ポート315に供給されると、その制御油圧に応じた推力によって、スプール弁子311がアップシフト位置側(図2の上側)に移動する。このスプール弁子311の移動(アップシフト側への移動)により、作動油(ライン圧PL)が制御油圧に対応する流量で入力ポート313から入出力ポート314を経てプライマリプーリ41の油圧アクチュエータ413に供給されるとともに、出力ポート317が閉鎖されてダウンシフト変速制御バルブ302への作動油の流通が阻止される。これによって変速制御圧が高められ、プライマリプーリ41のV溝幅が狭くなって変速比γが小さくなる(アップシフト)。
【0050】
なお、変速制御ソレノイドバルブ(DS1)304が出力する制御油圧がダウンシフト用変速制御バルブ302の第1油圧ポート326に供給されると、スプール弁子321が図2の上側に移動し、入出力ポート324が閉鎖される。
【0051】
一方、ECU8が出力するDS2変速Duty(ダウンシフト変速指令)に応じて変速制御ソレノイドバルブ(DS2)305が作動し、その変速制御ソレノイドバルブ(DS2)305が出力する制御油圧がアップシフト用変速制御バルブ301の第2油圧ポート316に供給されると、その制御油圧に応じた推力によって、スプール弁子311がダウンシフト位置側(図2の下側)に移動する。このスプール弁子311の移動(ダウンシフト側への移動)により、プライマリプーリ41の油圧アクチュエータ413内の作動油が制御油圧に対応する流量でアップシフト用変速制御バルブ301の入出力ポート314に流入する。このアップシフト用変速制御バルブ301に流入した作動油は出力ポート317及びダウンシフト用変速制御バルブ302の入出力ポート324を経て排出ポート325から排出される。これによって変速制御圧が低められ、入力側可変プーリ42のV溝幅が広くなって変速比γが大きくなる(ダウンシフト)。
【0052】
なお、変速制御ソレノイドバルブ(DS2)305が出力する制御油圧がダウンシフト用変速制御バルブ302の第2油圧ポート327に供給されると、スプール弁子321が図2の下側に移動し、入出力ポート324と排出ポート325とが連通する。
【0053】
以上のように、変速制御ソレノイドバルブ(DS1)304から制御油圧が出力されると、アップシフト用変速制御バルブ301から作動油がプライマリプーリ41の油圧アクチュエータ413に供給されて変速制御圧が連続的にアップシフトされる。また、変速制御ソレノイドバルブ(DS2)305から制御油圧が出力されると、プライマリプーリ41の油圧アクチュエータ413内の作動油がダウンシフト用変速制御バルブ302の排出ポート325から排出されて変速制御圧が連続的にダウンシフトされる。
【0054】
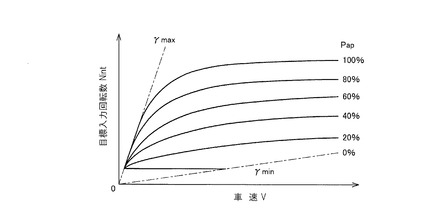
そして、この例では、例えば図4に示すように、運転者の出力要求量を表すアクセル操作量Pap(アクセル開度Pap)及び車速Vをパラメータとして予め設定された変速線マップから入力側の目標入力回転数Nintを算出し、実際の入力回転数Nin(実入力回転数Ni)が目標入力回転数Nintと一致するように、それらの偏差(Nint−Nin)に応じてベルト式無段変速機4の変速制御、すなわち、プライマリプーリ41の油圧アクチュエータ413に対する作動油の供給・排出によって変速制御圧(プライマリシーブ圧Pin)が制御され、変速比γが連続的に変化する。
【0055】
なお、図4の変速線マップは変速条件に相当し、ECU8のROM82(図7参照)内に記憶されている。この図4のマップにおいて、車速Vが小さくてアクセル操作量Papが大きい程、大きな変速比γになる目標入力回転数Nintが設定されるようになっている。また、車速Vは出力回転数Noutに対応するため(車速V=Nout×[2π×タイヤ半径]/デフ比)、プライマリプーリ回転数(入力軸回転数)Ninの目標値である目標入力回転数Nintは目標変速比γtに対応し、ベルト式無段変速機4の最小変速比γminと最大変速比γmaxの範囲内で設定されている。
【0056】
[ベルト挟圧力制御]
次に、セカンダリプーリ42の油圧アクチュエータ423の油圧制御回路について図3を参照して説明する。
【0057】
図3に示すように、セカンダリプーリ42の油圧アクチュエータ423にはベルト挟圧力制御バルブ303が接続されている。
【0058】
ベルト挟圧力制御バルブ303には、バルブボディ内において軸方向に移動可能なスプール弁子331が設けられている。スプール弁子331の一端側(図3の下端側)にはスプリング(圧縮コイルばね)332が配置されているとともに、その一端側に第1油圧ポート335が形成されている。また、スプール弁子331を挟んでスプリング332とは反対側の端部に第2油圧ポート336が形成されている。
【0059】
第1油圧ポート335にはリニアソレノイドバルブ(SLS)202が接続されており、そのリニアソレノイドバルブ(SLS)202が出力する制御油圧が第1油圧ポート335に印加される。第2油圧ポート336にはモジュレータバルブ206からの油圧が印加される。
【0060】
さらに、ベルト挟圧力制御バルブ303には、ライン圧PLが供給される入力ポート333、及び、セカンダリプーリ42の油圧アクチュエータ423に接続(連通)される出力ポート334が形成されている。
【0061】
この図3の油圧制御回路において、セカンダリプーリ42の油圧アクチュエータ423に所定の油圧が供給されている状態から、リニアソレノイドバルブ(SLS)202が出力する制御油圧が増大すると、ベルト挟圧力制御バルブ303のスプール弁子331が図3の上側に移動する。この場合、セカンダリプーリ42の油圧アクチュエータ423に供給される油圧が増大し、ベルト挟圧力が増大する。一方、セカンダリプーリ42の油圧アクチュエータ423に所定の油圧が供給されている状態から、リニアソレノイドバルブ(SLS)202が出力する制御油圧が低下すると、ベルト挟圧力制御バルブ303のスプール弁子331が図3の下側に移動する。この場合、セカンダリプーリ42の油圧シリンダに供給される油圧が低下し、ベルト挟圧力が低下する。
【0062】
このようにして、リニアソレノイドバルブ(SLS)202が出力する制御油圧をパイロット圧としてライン圧PLを調圧制御してセカンダリプーリ42の油圧アクチュエータ423に供給することによってベルト挟圧力が増減する。
【0063】
そして、この例では、例えば図5に示すように、伝達トルクに対応するアクセル開度Pap及び変速比γ(γ=Nin/Nout)をパラメータとし、ベルト滑りが生じないように予め設定された必要油圧(ベルト挟圧力に相当)のマップに従って、リニアソレノイドバルブ(SLS)202が出力する制御油圧を制御することにより、ベルト式無段変速機4のベルト挟圧力、つまり、セカンダリプーリ42の油圧アクチュエータ423の油圧を調圧制御することによって行われる。図5のマップは挟圧力制御条件に相当し、ECU8のROM82(図7参照)内に記憶されている。
【0064】
[ロックアップ制御回路]
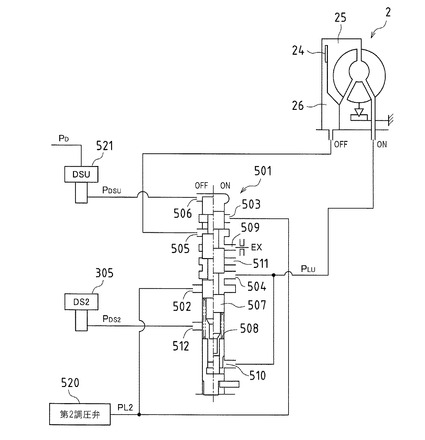
次に、油圧制御回路20のうちロックアップクラッチ24を係合・解放制御するロックアップ制御回路の一例を図6を参照して説明する。
【0065】
この例のロックアップ制御回路は、ロックアップコントロールバルブ501、第2調圧弁520、及び、ロックアップ差圧制御用ソレノイドバルブ(DSU)521などを備えている。
【0066】
ロックアップコントロールバルブ501には、一対の第1ライン圧ポート502及び第2ライン圧ポート503が設けられており、さらに係合側ポート504、解放側ポート505、及び、信号圧ポート506が設けられている。第1ライン圧ポート502及び第2ライン圧ポート503には、第2調圧弁520からの元圧PL2が供給される。第2調圧弁520は、油圧制御回路20(図1参照)内の制御圧(ライン圧PL)を調圧してロックアップコントロールバルブ501に供給する。
【0067】
ロックアップコントロールバルブ501の係合側ポート504及び解放側ポート505は、それぞれ、トルクコンバータ2の係合側油室25及び解放側油室26に接続されている。また、ロックアップコントロールバルブ501には、ロックアップ係合油圧PLUが供給されるフィードバック油室510が設けられている。
【0068】
ロックアップ差圧制御用ソレノイドバルブ(DSU)521はリニアソレノイドバルブであって、励磁状態のときに制御信号圧PDSUを出力し、非励磁状態のときに制御信号圧PDSUの出力を停止する。ロックアップ差圧制御用ソレノイドバルブ(DSU)521は、ECU8から出力されるロックアップ差圧指示値PDに従って励磁電流がDuty制御され、出力制御信号圧PDSUが連続的に変化する。ロックアップ差圧制御用ソレノイドバルブ(DSU)521から出力される制御信号圧PDSUはロックアップコントロールバルブ501の信号圧ポート506に供給される。
【0069】
以上の図6に示すロックアップ制御回路において、ECU8から出力されるロックアップ差圧指示値PDに従ってロックアップ差圧制御用ソレノイドバルブ(DSU)521が励磁状態となり、その制御信号圧PDSUがロックアップコントロールバルブ501の信号圧ポート506に供給されると、図6の中心線より右側半分に示すように、ロックアップコントロールバルブ501のスプール弁子507が圧縮コイルばね508の付勢力に抗して下方へ移動した状態(ON状態)となって、第1ライン圧ポート502と係合側ポート504とが連通する。これによって、ロックアップ係合油圧PLUが係合側油室25へ供給されるとともに、解放側ポート505がドレーンポート509に連通することにより、解放側油室26内の作動油がドレーンされ、ロックアップクラッチ24が係合(ON)する。
【0070】
さらに、ロックアップコントロールバルブ501のフィードバック油室510には、ロックアップ係合油圧PLUが供給されるので、そのロックアップ係合油圧PLUが制御信号圧PDSUと釣り合うようにスプール弁子507が移動する。これにより、制御信号圧PDSUつまりロックアップ差圧指示値PDに応じて、ロックアップクラッチ24の係合側油室25内の油圧PONと解放側油室26内の油圧POFFとの差圧ΔP(ロックアップ差圧ΔP)を連続的に制御することが可能となり、そのロックアップ差圧ΔPに応じてロックアップクラッチ24の係合トルクつまり係合力を連続的に変化させることができる。
【0071】
一方、ロックアップ差圧制御用ソレノイドバルブ(DSU)521が非励磁状態となって、ロックアップ差圧制御用ソレノイドバルブ(DSU)521からの制御信号圧PDSUの出力が停止すると、ロックアップコントロールバルブ501は、図6の中心線より左側半分に示すように、圧縮コイルばね508の付勢力によってスプール弁子507が上方へと移動して原位置に移動した状態(OFF状態)となる。
【0072】
このOFF状態では、第2ライン圧ポート503と解放側ポート505とが連通し、元圧PL2がロックアップクラッチ24の解放側油室26に供給されるとともに、係合側ポート504が排出ポート511に連通する。これにより、ロックアップクラッチ24の係合側油室25内の作動油が排出ポート511から排出され、ロックアップクラッチ24が解放(OFF)状態となる。排出ポート511から排出された作動油は、図示しないが、オイルクーラを経てオイルパン等へ戻されるようになっており、そのオイルクーラにより作動油が冷却されるようになっている。なお、余剰の作動油は、クーラバイパスバルブからオイルパン等へ戻される。
【0073】
なお、ロックアップコントロールバルブ501にはバックアップポート512が設けられている。このバックアップポート512には上記した変速制御ソレノイドバルブ(DS2)305の出力油圧PDS2が供給される。バックアップポート512に変速制御ソレノイドバルブ(DS2)305からの油圧PDS2が供給されると、ロックアップコントロールバルブ501の信号圧ポート506への制御信号圧PDSUの供給に関わらず、ロックアップコントロールバルブ501をOFF状態に維持してロックアップクラッチ24を強制的に解放する。
【0074】
−ECU−
ECU8は、図7に示すように、CPU81、ROM82、RAM83及びバックアップRAM84などを備えている。
【0075】
ROM82には、各種制御プログラムや、それら各種制御プログラムを実行する際に参照されるマップ等が記憶されている。CPU81は、ROM82に記憶された各種制御プログラムやマップに基づいて演算処理を実行する。また、RAM83はCPU81での演算結果や各センサから入力されたデータ等を一時的に記憶するメモリであり、バックアップRAM84はエンジン1の停止時にその保存すべきデータ等を記憶する不揮発性のメモリである。
【0076】
これらCPU81、ROM82、RAM83、及び、バックアップRAM84はバス87を介して互いに接続されるとともに、入力インターフェース85及び出力インターフェース86に接続されている。
【0077】
入力インターフェース85には、エンジン回転数センサ101、スロットル開度センサ102、水温センサ103、タービンシャフト27の回転数を検出して出力するタービン回転数センサ104、プライマリプーリ41の回転数を検出して信号を出力する入力回転数センサ105、セカンダリプーリ42の回転数を検出して出力する出力回転数センサ106、アクセル開度センサ107、CVT油温センサ108、ブレーキペダルセンサ109、シフトレバー9のレバーポジション(操作位置)を検出するレバーポジションセンサ110、走行路面の勾配を検出する勾配センサ111、及び、油圧制御回路20の作動油のライン圧PLを検出する油圧センサ112などが接続されており、その各センサの出力信号、つまり、エンジン1の回転数(エンジン回転数)Ne、スロットルバルブ12のスロットル開度Tap、エンジン1の冷却水温Tw、タービンシャフト27の回転数(タービン回転数)Nt、入力回転数(プライマリプーリ回転数)Nin、出力回転数(セカンダリプーリ回転数)Nout、アクセルペダルの操作量(アクセル関度)Pap、油圧制御回路20の油温(CVT油温Thc)、常用ブレーキであるフットブレーキの操作の有無(ブレーキON・OFF)、車両走行路の路面勾配θ、油圧回路20の油圧(ライン圧PL)、及び、シフトレバー9のレバーポジション(操作位置)などを表す信号がECU8に供給される。
【0078】
出力インターフェース86には、スロットルモータ13、燃料噴射装置14、点火装置15及び油圧制御回路20などが接続されている。
【0079】
ここで、ECU8に供給される信号のうち、タービン回転数Ntは、前後進切替装置3のフォワードクラッチC1が係合する前進走行時にはプライマリプーリ回転数(入力軸回転数)Ninと一致し、出力回転数(セカンダリプーリ回転数)Noutは車速Vに対応する。また、アクセル操作量Papは運転者の出力要求量を表している。
【0080】
また、シフトレバー9は、駐車のためのパーキング位置「P」、後進走行のためのリバース位置「R」、動力伝達を遮断するニュートラル位置「N」、前進走行のためのドライブ位置「D」、前進走行時にベルト式無段変速機4の変速比γを手動操作で増減できるマニュアル位置「M」などの各位置に選択的に操作されるようになっている。
【0081】
マニュアル位置「M」には、変速比γを増減するためのダウンシフト位置やアップシフト位置、あるいは、変速範囲の上限(変速比γが小さい側)が異なる複数の変速レンジを選択できる複数のレンジ位置等が備えられている。
【0082】
レバーポジションセンサ110は、例えば、パーキング位置「Pレンジ」、リバース位置「Rレンジ」、ニュートラル位置「Nレンジ」、ドライブ位置「Dレンジ」、マニュアル位置「Mレンジ」やアップシフト位置、ダウンシフト位置、あるいはレンジ位置等へシフトレバー9が操作されたことを検出する複数のON・OFFスイッチ等を備えている。なお、変速比γを手動操作で変更するために、シフトレバー9とは別にステアリングホイール等にダウンシフトスイッチやアップシフトスイッチ、あるいはレバー等を設けることも可能である。
【0083】
そして、ECU8は、上記した各種センサの検出信号に基づいて、燃料噴射制御(インジェクタの駆動制御)、点火時期制御(点火プラグの点火時期制御)、スロットルバルブ12のスロットルモータ13の駆動制御などのエンジン1の制御、上述したベルト式無段変速機4の変速速度制御及びベルト挟圧力制御、並びに、ロックアップクラッチ24の係合・解放制御などを実行する。さらに、ECU8は、下記の[フューエルカット制御]、[減速ロックアップスリップ制御]、及び、[車両停止時の制御]を実行する。
【0084】
−フューエルカット制御−
ECU8は、所定の条件が成立したときにフューエルカット制御を実行する。フューエルカット制御は、燃費を向上させるためにエンジン1への燃料供給を停止する制御であって、車両減速時(アクセルオフ)で、かつ、エンジン回転数Neがフューエルカット開始回転数以上であるときにエンジン1への燃料噴射を停止(インジェクタからの燃料噴射を停止)し、エンジン回転数Neがフューエルカット復帰回転数(フューエルカット停止のための燃料噴射復帰判定回転数)よりも低下したときにエンジンへの燃料噴射を再開する制御である。なお、フューエルカット復帰回転数は、耐エンスト(エンジンストール)性を確保することが可能であり、エンジン1の安定した回転を維持することが可能な回転数に設定されている。また、フューエルカット開始回転数は、フューエルカット復帰回転数よりも所定量だけ高い回転数に設定されている。
【0085】
−減速ロックアップスリップ制御−
ECU8は、車両減速時(コースト走行時)のフューエルカット中に、ロックアップクラッチ24に微小な滑りを与える減速ロックアップスリップ制御(フレックスロックアップ制御)を実行する。具体的には、ECU8は、アクセル開度センサ107の出力信号から得られるアクセル開度Papが略零(Pap≒0)であり、減速走行する前進走行時において生じる駆動輪側からの逆入力をエンジン1側へ伝達するとき(被駆動時)、つまりエンジンブレーキ作用が得られている状態のときにロックアップクラッチ24に微小な滑りを与える制御を実行する。このような減速ロックアップスリップ制御を実行すると、タービン回転速度NT及びエンジン回転速度Neが車両の減速に従って緩やかに減少するとともに、エンジン回転速度Neがタービン回転速度Nt付近まで引き上げられるため、エンジン1に対する燃料供給量を抑制する制御状態(フューエルカット状態)がさらに長い期間維持されて燃費が向上する。
【0086】
−車両停止時の制御−
次に、ECU8が実行する車両停止時の制御について説明する。
【0087】
まず、車両停止時の制御に用いるマップについて図8を参照して説明する。
【0088】
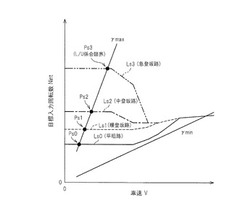
図8のマップは、Dレンジでのコースト走行時(減速走行時)の目標入力回転数Nintを、車速V(アクセル操作量Pap=0)をパラメータとして算出するための変速線マップであって、4本の変速線Ls0,Ls1,Ls2,Ls3が設定されている。
【0089】
変速線Ls0は、走行路が平坦路(路面勾配θ=0°)であるときに目標入力回転数Nintの算出に用いる変速線であり、変速線Ls1は、走行路が緩登坂路であるときに目標入力回転数Nintの算出に用いる変速線である。また、変速線Ls2は、走行路が中登坂路(例えば路面勾配θが5°以上)であるときに目標入力回転数Nintの算出に用いる変速線であり、変速線Ls3は、走行路が急登坂路(例えば路面勾配θが10°以上)であるときに目標入力回転数Nintの算出に用いる変速線である。
【0090】
これら変速線Ls0,Ls1,Ls2,Ls3のうち、平坦路用の変速線Ls0及び緩登坂路用の変速線Ls1については、路面勾配が小さい場合(勾配=0も含む)には車両停止時に変速比を最大変速比γmaxに戻さなくても車両発進時の駆動力を確保できるという点を考慮し、車両停止時の目標変速比(最終目標変速比)γt0,γt1が最大変速比γmaxまで至らないような目標入力回転数Nintが設定されている。ただし、緩登坂路は平坦路よりも登り勾配が少し大きいので、緩登坂路用の最終目標変速比γt1が平坦路用の最終目標変速比γt0よりも大きい側(Lo側)の値となるように、緩登坂路用の変速線Ls1の最終目標入力回転数Nintを、平坦路用の変速線Ls0の最終目標入力回転数Nintよりも大きい側に設定している。なお、これら平坦路用の最終目標変速比γt0(最終目標入力回転数Nint)、及び、緩登坂路用の最終目標変速比γt1(最終目標入力回転数Nint)は、それぞれ、次回の車両発進時(平坦路や緩登坂路での発進時)に必要な駆動力を考慮して実験・シミュレーション等によって適合した値が設定されている。
【0091】
一方、中登坂路用の変速線Ls2は、その低車速域の目標入力回転数Nintが上記緩登坂路用の変速線Ls1の低車速域の目標入力回転数Nintに対して大きい側に設定されており、車両停止時までの間に最大変速比γmax(目標変速比γt2)に到達するような目標入力回転数Nintが設定されている。
【0092】
また、急登坂路用の変速線Ls3は、その低車速域の目標入力回転数Nintが上記中登坂路用の変速線Ls2の低車速域の目標入力回転数Nintに対して大きい側に設定されており、最大変速比γmax(目標変速比γt3)に変速するまでの時間が中登坂路の場合よりも短くなるように目標入力回転数Nintが設定されている。つまり、走行路が急登坂路である場合は、走行抵抗(減速度)が大きくてロックアップクラッチ24を解放(L/U−off)してから車両停止までの時間が短くなるという点を考慮して、中登坂路の場合よりも最大変速比γmaxに早く戻るように目標入力回転数Nintが設定されている。
【0093】
以上のように、図8に示す変速線マップでは、路面勾配が大きいほど(路面勾配が正方向に大きいほど)、目標変速比γt(目標入力回転数Nint)が大きくなる側(Lo側)に設定されている([平坦路:γt0]<[緩登坂路:γt1]<[中登坂路:γt2(γmax)・急登坂路:γt3(γmax)])。なお、図8に示す変速線マップはECU8のROM82内に記憶されている。
【0094】
また、図8に示す変速線マップにおいて、各変速線Ls0,Ls1,Ls2,Ls3上にプロットしている黒丸印は、それぞれ、ロックアップクラッチ24の係合限界(L/U係合限界)ポイント(入力回転数・車速ポイント)Ps0,Ps1,Ps2,Ps3である。これらL/U係合限界ポイントPs0〜Ps3の関係について説明すると、この図8に示すように、低車速域の目標入力回転数Nintが大きくなるほど、L/U係合限界ポイント(車速)は高車速側の値となる(Ps0<Ps1<Ps2<Ps3)。
【0095】
そして、この例では、上記L/U係合限界ポイントを考慮して、各走行路(平坦路・緩登坂路・中登坂路・急登坂路)毎にロックアップクラッチ24を解放する車速(L/U−off車速)Vs0,Vs1,Vs2,Vs3を設定している。
【0096】
具体的には、平坦路用のL/U−off車速Vs0については、上記L/U係合限界ポイントPs0よりも所定量(マージン分)だけ高車速側に設定している。緩登坂路用のL/U−off車速Vs1については、上記L/U係合限界ポイントPs1よりも所定量(マージン分)だけ高車速側に設定している。中登坂路用のL/U−off車速Vs2については、上記L/U係合限界ポイントPs2よりも所定量(マージン分)だけ高車速側に設定している。急登坂路用のL/U−off車速Vs3については、上記L/U係合限界ポイントPs3よりも所定量(マージン分)だけ高車速側に設定している。つまり、L/U−off車速Vs0〜Vs3については、路面勾配が大きいほどロックアップクラッチ24を解放する車速Vが高くなるように設定している(Vs0<Vs1<Vs2<Vs3)。これらL/U−off車速Vs0、Va1,Vs2,Vs3はECU8のROM82内に記憶されている。
【0097】
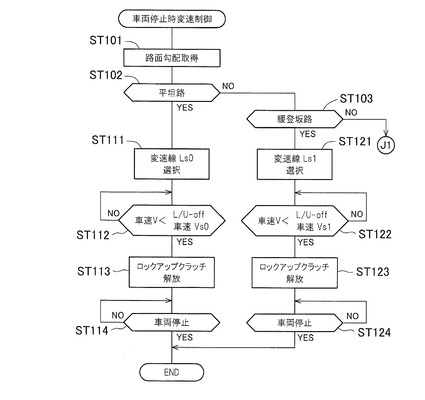
次に、車両停止時の制御の具体的な例について、図9及び図10のフローチャートを参照して説明する。図9及び図10の制御ルーチンはECU8において実行される。なお、図9及び図10には、上記した平坦路・緩登坂路・中登坂路・急登坂路での車両停止時の制御の一例を示している。
【0098】
図9及び図10の制御ルーチンは、アクセル開度Pap(アクセル開度センサ107の出力信号から認識)が「0」であり、かつ、車両減速時(出力回転数センサ105の出力信号(Nout)から認識)であるときに開始される。
【0099】
図9及び図10の制御ルーチンが開始されると、まずはステップST101において、勾配センサ111の出力信号に基づいて路面勾配θを取得する。次に、ステップST102において、上記ステップST101で取得した路面勾配θに基づいて走行路が「平坦路(θ=0)」であるか否かを判定し、その判定結果が否定判定(NO)である場合はステップST103に移行する。ステップST102の判定結果が肯定判定(YES)である場合はステップST111に進む。
【0100】
ステップST111では、図8の変速線マップに設定された変速線Ls0,Ls1,Ls2,Ls3のうち、平坦路用の変速線Ls0を選択する。
【0101】
次に、ステップST112において、現在の車速V(出力回転数センサ105の出力信号(Nout)から算出)と、上記した平坦路用のL/U−off車速Vs0とを比較し、現在の車速VがL/U−off車速Vs0を下回った時点([現在車速V<Vs0]となりステップST112の判定結果が肯定判定(YES)となった時点)でロックアップクラッチ24を解放する(ステップST113)。このロックアップクラッチ24の解放後で車両停止時までの間に、ベルト式無段変速機4の変速比が大きい側(Lo側)に変速されて実際の変速比γが最終目標変速比γt0となる。ただし、走行路が平坦路の場合、上述したように、実変速比が最大変速比γmaxまで戻らないようになっている。なお、この平坦路での車両減速時において、車速Vが上記平坦路用のL/U−off車速Vs0に到達するまで(ロックアップクラッチ24が係合中)は、実際の変速比γは最小変速比γminに維持される。
【0102】
そして、出力回転数センサ105の出力信号から算出される車速Vに基づいて車両が停止したか否かを判定し(ステップST114)、このステップST114の判定結果が肯定判定(YES)となったときに処理を終了する。
【0103】
また、上記ステップST102の判定結果が否定判定(NO)である場合(走行路が平坦路でない場合)は、ステップST103において、走行路が「緩登坂路」であるか否かを判定し、その判定結果が否定判定(NO)である場合は図10のステップST104に移行する。ステップST103の判定結果が肯定判定(YES)である場合(走行路が緩登坂路である場合)はステップST121に進む。
【0104】
ステップST121では、図8の変速線マップに設定された変速線Ls0,Ls1,Ls2,Ls3のうち、緩登坂路の変速線Ls1を選択する。
【0105】
次に、ステップST122において、現在の車速V(出力回転数センサ105の出力信号(Nout)から算出)と、上記した緩登坂路用のL/U−off車速Vs1とを比較し、現在の車速VがL/U−off車速Vs1を下回った時点([現在車速V<Vs1]となりステップST122の判定結果が肯定判定(YES)となった時点)でロックアップクラッチ24を解放する(ステップST123)。このロックアップクラッチ24の解放後で車両停止時までの間に、ベルト式無段変速機4の変速比が大きい側(Lo側)に変速されて、実際の変速比γが最終目標変速比γt1となる。ただし、走行路が緩登坂路の場合、平坦路の場合と同様に、実変速比が最大変速比γmaxまで戻らないが、上述したように緩登坂路での最終目標変速比γt1は、平坦路での最終目標変速比γt0よりも大きい側(Lo側)の値となる。なお、この緩登坂路での車両減速時において、車速Vが上記緩登坂路用のL/U−off車速Vs1に到達するまで実際の変速比γは最小変速比γminに維持される。
【0106】
そして、出力回転数センサ105の出力信号から算出される車速Vに基づいて車両が停止したか否かを判定し(ステップST124)、このステップST124の判定結果が肯定判定(YES)となったときに処理を終了する。
【0107】
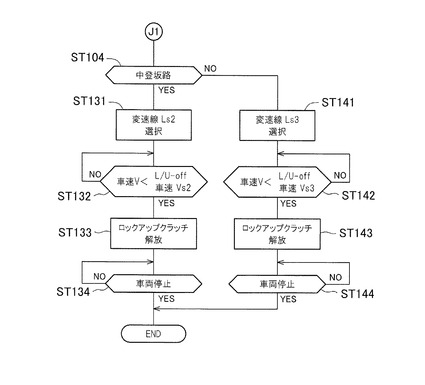
一方、上記ステップST103の判定結果が否定判定(NO)である場合(走行路が平坦路及び緩登坂路でない場合)は、図10に示すステップST104において走行路が「中登坂路」であるか否かを判定し、その判定結果が否定判定(NO)である場合はステップST141に移行する。ステップST104の判定結果が肯定判定(YES)である場合(走行路が中登坂路である場合)はステップST131に進む。
【0108】
ステップST131では、図8の変速線マップに設定された変速線Ls0,Ls1,Ls2,Ls3のうち、中登坂路の変速線Ls2を選択する。次に、ステップST132において、現在の車速V(出力回転数センサ105の出力信号(Nout)から算出)と、上記した中登坂路用のL/U−off車速Vs2とを比較し、現在の車速VがL/U−off車速Vs2を下回った時点([現在車速V<Vs2]となりステップST132の判定結果が肯定判定(YES)となった時点)でロックアップクラッチ24を解放する(ステップST133)。このロックアップクラッチ24の解放後で車両停止時までの間に、ベルト式無段変速機4の変速比が大きい側(Lo側)に変速されて、実際の変速比γが最大変速比γmax(目標変速比γt2)となる(γmaxに戻る)。なお、この中登坂路での車両減速時において、車速Vが上記中緩登坂路用のL/U−off車速Vs2に到達するまで(ロックアップクラッチ24が係合中)は、実際の変速比γは最小変速比γminに維持される。
【0109】
そして、出力回転数センサ105の出力信号から算出される車速Vに基づいて車両が停止したか否かを判定し(ステップST134)、このステップST134の判定結果が肯定判定(YES)となったときに処理を終了する。
【0110】
また、上記ステップST104の判定結果が否定判定(NO)である場合、走行路が急登坂路であると判断してステップST141に進む。ステップST141では、図8の変速線マップに設定された変速線Ls0,Ls1,Ls2,Ls3のうち、急登坂路の変速線Ls3を選択する。
【0111】
次に、ステップST142において、現在の車速V(出力回転数センサ105の出力信号(Nout)から算出)と、上記した急登坂路用のL/U−off車速Vs3とを比較し、現在の車速VがL/U−off車速Vs3を下回った時点([現在車速V<Vs3]となりステップST142の判定結果が肯定判定(YES)となった時点)でロックアップクラッチ24を解放する(ステップST143)。このロックアップクラッチ24の解放後で車両停止時までの間に、ベルト式無段変速機4の変速比が大きい側(Lo側)に変速されて、実際の変速比γが最大変速比γmax(目標変速比γt3)となる(γmaxに戻る)。ただし、急登坂路の変速線Ls3の最終目標入力回転数Nintは、中登坂路の変速線Ls2の最終目標入力回転数Nintよりも大きい側に設定さているので最大変速比γmaxに早く戻る。なお、この急登坂路での車両減速時において、車速Vが上記急登坂路用のL/U−off車速Vs3に到達するまで(ロックアップクラッチ24が係合中)は、実際の変速比γは最小変速比γminに維持される。
【0112】
そして、ステップST144において、出力回転数センサ105の出力信号から算出される車速Vに基づいて車両が停止したか否かを判定し、このステップST144の判定結果が肯定判定(YES)となったときに処理を終了する。
【0113】
なお、以上の図9及び図10の制御ルーチンの実行中に、アクセルペダルが操作(アクセルON)された場合には処理を終了する。
【0114】
以上のように、この例によれば、路面勾配が大きいほど目標変速比を大きい側(Lo側)に設定しているので、路面勾配が小さい場合は大きい場合と比較して車両停止時の目標変速比を小さくすることができる。これによって、車両減速時おいてベルト式無段変速機4の変速比を小さい側(Hi側)に維持できる範囲を広げることができる。すなわち、従来制御では、路面勾配の大きさに関係なく車両停止時の目標変速比を最大変速比γmaxに設定しているので、平坦路や緩やかな登坂路においても急登坂路と同様なタイミングで変速比をHi側からLo側に変速している。これに対し、上述の如く、路面勾配が小さいほど最終目標変速比γt(目標入力回転数Mint)を小さい側(Hi側)に設定することにより、平坦路や緩やかな登坂路のように路面勾配が小さい場合には変速タイミングを遅らすことができ、車両減速時において変速比をHi側に維持できる範囲を広げることができる。このように変速比をHi側に維持できる範囲が広がることにより燃費の改善を図ることができる。また、この例では、急登坂路などの路面勾配が大きい場合には、車両停止時の目標変速比を最大変速比γmaxとしているので登坂路での発進時の駆動力を十分に確保することができる。このように、この例によれば、登坂路での発進時の駆動力を確保しながら、燃費の改善を図ることができる。
【0115】
また、この例では、車両停止時の走行路が平坦路や緩やかな登坂路(緩登坂路)である場合は、ベルト式無段変速機4の変速比が最大変速比γmaxまで戻らないようにしているので、機械式(エンジン駆動)のオイルポンプ10の仕事量を減少させることができ、燃費の向上を図ることができる。また、平坦路での車両停止時にベルト式無段変速機4の変速比が最大変速比γmaxまで戻らないようにすることで、平坦路での車両停止時の引き込み感を抑制することができる。すなわち、平坦路において最大変速比γmaxまで変速しようとすると、減速していくしたがって減速度がきつくなるので大きな引き込み感が発生するが、最大変速比γmaxまで変速せずに変速量を少なくすることによって、そのような引き込み感を低減することができる。なお、中登坂路や急登坂路では、走行抵抗(減速度)が大きいので、最大変速比γmaxまで変速することによる引き込み感は感じにくくなる。
【0116】
さらに、路面勾配が小さいほどロックアップクラッチ24を開放する車速を低く設定(路面勾配が大きいほどロックアップクラッチ24を解放する車速を高く設定)しているので、平坦路や緩やかな登坂路などの路面勾配が小さい場合(勾配=0も含む)に、フューエルカット領域を拡大することが可能となり、これによって燃費をより効果的に向上させることができる。
【0117】
さらにまた、この例では、急登坂路の場合は走行抵抗が大きくてロックアップクラッチ24を解放(L/U−OFF)してから車両停止までの時間が中登坂路の場合よりも短くなるという点を考慮し、車両停止時の走行路が急登坂路である場合は中登坂路である場合と比較して、最終目標入力回転数Nintを大きくして最大変速比γmaxに早く変速されるようにしているので、急登坂路においてもベルト式無段変速機4の変速比を最大変速比γmaxに確実に戻すことができる。
【0118】
以上の例では、登坂路での変速線として、緩登坂路用の変速線Ls1、中登坂路用のLs2及び急登坂路用の変速線Ls3の3本の変速線を設定した例について説明したが、これに限られることなく、登坂路用の変速線は2本であってもよい。また、登坂路の領域を更に細かく区分して4本以上の登坂路用の変速線を設定するようにしてもよい。
【0119】
なお、降坂路での車両停止時の制御については、特に限定されないが、例えば、上記した平坦路の場合と同様な制御を行うようにしてもよいし、また、降坂路の路面勾配が小さいほど、車両停止時の目標変速比を小さい側に設定するという制御を行うようにしてもよい。
【0120】
−駆動力補正制御−
次に、上述の車両停止時の制御の補助制御としての駆動力補正制御について説明する。
【0121】
まず、上述した車両停止時の制御においては、何らかの要因(例えば、油圧不足など)によって、車両停止時のベルト式無段変速機4の実際の変速比γr(実変速比γt)が、最終目標変速比γt(例えば最大変速比γmax)にまで変速されない場合があり、こうした状況になると、次回の車両発進時の駆動力が低下することが懸念される。
【0122】
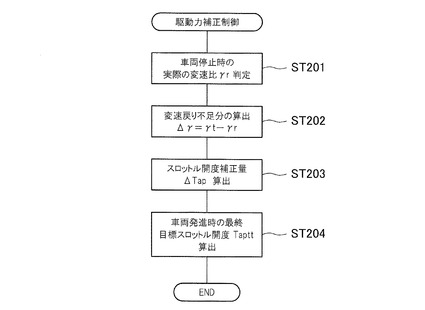
このような点を考慮して、この例では、ベルト式無段変速機4の実際の変速比γrが最終目標変速比γtにまで戻されていない場合には、図11に示す駆動力補正制御を実施する。図11の制御ルーチンはECU8において実行される。
【0123】
この図11の制御ルーチンが開始されると、ステップST201において、車両停止時のベルト式無段変速機4の実際の変速比γrを判定する。具体的には、例えば、車両停止直前の入力回転数Ninと出力回転数Noutから実際の変速比γr(γr=Nin/Nout)を算出する。また、他の判定方法として、プライマリプーリ41のV溝幅及び/またはセカンダリプーリ42のV溝幅をセンサ(図示せず)等によって検出し、その検出値に基づいて実際の変速比γrを判定するという方法も挙げることができる。
【0124】
ステップST202では、最終目標変速比γt(平坦路の最終目標変速比γt0、緩登坂路の最終目標変速比γt1、または、最大変速比γmax)と、上記ステップST201で判定した実際の変速比γrとの差Δγ(変速戻り不足分)を算出する(Δγ=γt−γr)。なお、このステップST202で算出したΔγが「0」または「所定の許容範囲内の値」である場合は処理を終了する。
【0125】
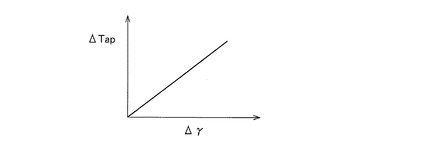
ステップST203では、上記ステップST202で算出したΔγ(変速戻り不足分)を用いて、図12のマップを参照してスロットル開度補正量ΔTapを算出する。この図12のマップは、上記Δγ(変速戻り不足分)をパラメータとして、その変速戻り不足分による駆動力低下を解消できるようなスロットル開度(補正量)を実験・シミュレーション等によって経験的に取得した値をマップ化したものであって、ECU8のROM82内に記憶されている。
【0126】
そして、ステップST204において、車両発進時の最終目標スロットル開度Tapttを算出する。具体的には、車両発進時のアクセルペダルの操作量(駆動要求量:アクセル開度Pap)から目標スロットル開度Taptを求め、その目標スロットル開度Taptに、上記ステップST203で算出したスロットル開度補正量ΔTapを加算することにより最終目標スロットル開度Taptt(Taptt=Tapt+ΔTap)を算出する。このようにして算出した最終目標スロットル開度Tapttに基づいて、次回の車両発進時のエンジン制御(スロットルバルブ12のスロットルモータ13の駆動制御)を実行する。
【0127】
このように、車両停止時にベルト式無段変速機4の実際の変速比γrが最終目標変速比(γt0、γt1、または、γmax)まで戻らない場合は、その変速戻り不足分Δγに相当するスロットル開度(補正量ΔTap)を上乗せすることにより、車両発進時の駆動力を十分に確保することが可能になるので、ドライバのフィーリング(ドライバビリティ)が損なわれることがなくなる。
【0128】
なお、以上の例では、変速戻り不足分Δγからスロットル開度補正量ΔTapを算出しているが、変速戻り不足分Δγからアクセル開度補正量ΔPapを算出し、車両発進時のアクセルペダルの操作量(アクセル開度Pap)に上記アクセル開度補正量ΔPapを加算して最終目標アクセル開度Papttを求め、その最終目標アクセル開度Papttから最終目標スロットル開度Tapttを算出するようにしてもよい。
【0129】
−EOPアシスト制御−
次に、上述の車両停止時の制御の補助制御としてのEOPアシスト制御(電動オイルポンプによるアシスト制御)について説明する。
【0130】
まず、上述した車両停止時の制御においては、ベルト式無段変速機4の変速制御用の油圧が不足(機械式オイルポンプ10の仕事量が不足)する場合、最終目標変速比γtまで変速できない場合がある。特に、上述した中登坂路や急登坂路での車両停止時には、変速比を最大変速比γmaxにまで戻す必要があるため、機械式のオイルポンプ10の油圧だけでは変速に必要な油圧が不足することが懸念される。
【0131】
このような点を考慮し、この例では、上記した油圧の不足が発生する場合には、その油圧不足分を補うことにより、車両停止時に変速比を最終目標変速比γtまで確実に戻るようにする。具体的には、この例では、アイドルストップ車両等のエコラン車両などを対象としており、こうした車両に搭載されている電動オイルポンプ(EOP)を利用して、油圧が不足する場合には、電動オイルポンプでアシストすることにより油圧不足を解消するという制御を行う。
【0132】
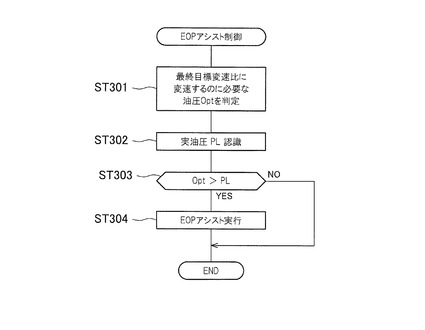
その制御(EOPアシスト制御)の一例について図13のフローチャートを参照して説明する。図13の制御ルーチンはECU8において実行される。
【0133】
この図13の制御ルーチンが開始されると、ステップST301において、最終目標変速比(γt0、γt1、または、γmax)に変速するのに必要な油圧Optを、現在車速Vなどに基づいてマップや演算式に基づいて算出する。さらに、ステップST302において、油圧センサ112の出力信号に基づいて実油圧(ライン圧)PLを認識する。この実油圧PLの認識処理及び上記必要油圧Optの算出処理は、例えば、上記した図8のステップST101で走行路を判定したとき(平坦路、緩登坂路、中登坂路、または、急登坂路を判定したとき)に実行するようにすればよい。なお、必要油圧Optの算出用のマップとしては、例えば、最終目標変速比(γt0,γt1,γmax)及び車速などをパラメータとして、その最終目標変速比への変速に必要な油圧を実験・シミュレーション等によって取得・適合した値をマップ化したものを用いる。
【0134】
次に、ステップST303において、上記ステップST301で算出した必要油圧Optと、上記ステップST302で認識した実油圧PLとを比較し、その必要油圧Optが実油圧PLよりも大きい場合([Opt>PL]でステップST303の判定結果が肯定判定(YES)である場合)は、電動オイルポンプを作動(EOPアシスト実行)して油圧を増大させる。このEPOアシストの開始タイミングは、例えば、上記したL/U−off車速(Vs0,Vs1,Vs2,Vs3:図8参照)よりも高車速側のタイミングとしてもよいし、あるいは、車両減速時に変速比をHi側からLo側に変速する過程でEOPアシストを開始するようにしてもよい。
【0135】
そして、このように、EOPアシストを実行して油圧を増大させることにより、車両停止時の最終目標変速比が最大変速比γmaxである場合であっても、変速比を確実に戻すことが可能になる。なお、上記ステップST303の判定結果が否定判定(NO)である場合つまり上記実油圧PLが必要油圧Opt以上(Opt≦PL)である場合はEOPアシストを実行せずに処理を終了する。
【0136】
ここで、電動オイルポンプで油圧アシストを行う場合の他の制御例として、油圧の不足が発生しない状況であっても、EOPアシストを実行するという制御を挙げることができる。このようなEOPアシスト制御を行えば、ベルト式無段変速機4の変速制御用の油圧がアップし、その油圧アップに相当する分だけHi側からLo側への変速速度が速くなるので、L/U−off車速(Vs0〜Vs3)を低車速側に設定することできる。このように、EOPアシストを実行してL/U−off車速を低車速側に設定することにより、燃費の向上を図ることができる。この場合、EPOアシストの開始タイミングは、例えば上記したL/U−off車速(Vs0,Vs1,Vs2,Vs3:図8参照)よりも高車速側のタイミングとすればよい。
【0137】
−他の実施形態−
以上の例では、ガソリンエンジンを搭載した車両の制御装置に本発明を適用した例を示したが、本発明はこれに限られることなく、ディーゼルエンジン等の他のエンジンを搭載した車両の制御装置にも適用可能である。また、車両の動力源については、エンジン(内燃機関)のほか、エンジンと電動モータの両方を備えているハイブリッド形動力源であってもよい。
【0138】
また、車両に搭載される無段変速機としては、上記したベルト式無段変速機に限られることなく、トロイダル式無段変速機などの他の形式の無段変速機であってもよい。
【0139】
また、本発明の制御装置は、FF(フロントエンジン・フロントドライブ)型車両に限れられることなく、FR(フロントエンジン・リアドライブ)型車両、4輪駆動車にも適用できる。
【産業上の利用可能性】
【0140】
本発明は、エンジン(内燃機関)及び自動変速機が搭載された車両の制御装置に利用可能であり、さらに詳しくは、エンジンと自動変速機との間に、ロックアップクラッチ付きの流体伝動装置(トルクコンバータ)が設けられた車両の制御装置に利用することができる。
【符号の説明】
【0141】
1 エンジン
4 ベルト式無段変速機
10 機械式のオイルポンプ
41 プライマリプーリ
413 油圧アクチュエータ
42 セカンダリプーリ
423 油圧アクチュエータ
43 ベルト
101 エンジン回転数センサ
102 スロットル開度センサ
105 入力回転数センサ
106 出力回転数センサ
107 アクセル開度センサ
111 勾配センサ
112 油圧センサ
20 油圧制御回路
8 ECU
【技術分野】
【0001】
本発明は、エンジン及び自動変速機が搭載された車両の制御装置に関する。
【背景技術】
【0002】
エンジン(内燃機関)を搭載した車両において、エンジンが発生するトルク及び回転速度を車両の走行状態に応じて適切に駆動輪に伝達する変速機として、エンジンと駆動輪との間の変速比を自動的に最適設定する自動変速機が知られている。車両に搭載される自動変速機としては、例えば、クラッチやブレーキなどの摩擦係合要素と遊星歯車装置とを用いて変速比(ギヤ比)を設定する遊星歯車式変速機や、変速比を無段階に調整するベルト式の無段変速機(CVT:Continuously Variable Transmission)がある。
【0003】
車両に搭載される無段変速機においては、例えば、アクセルペダルの踏み込み量に代表される駆動要求量、エンジン回転数や車速などの車両状態に基づいて目標入力回転数(目標変速比)を設定し、その目標入力回転数(目標変速比)と実際の入力回転数(実際の変速比)との偏差に基づくフィードバック制御によって変速比を制御している。
【0004】
また、この種の自動変速機が搭載された車両においては、エンジンと自動変速機との間にフルードカップリングやトルクコンバータなどの流体伝動装置が配設されている。さらに、この流体伝動装置として、ロックアップクラッチを備えたものが知られている(例えば、特許文献1参照)。ロックアップクラッチは、作動油(ATF)の油圧によって摩擦係合することにより、流体伝動装置の入力側と出力側とを直結可能とするものである。
【0005】
このようなロックアップクラッチ付きの流体伝動装置が搭載された車両においては、例えば、自動変速機の油圧制御を含む油圧制御系の油圧(ライン圧)を元圧として、ロックアップクラッチに作用させる油圧を制御することによって、ロックアップクラッチの係合状態・半係合状態・解放状態を制御している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−014189号公報
【特許文献2】特開2006−144843号公報
【特許文献3】特開2003−254108号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、車両に搭載される無段変速機においては、車両停止時(0km/h)に次回の車両発進に備えて変速比を最大変速比γmaxで停車できるように、車両減速時に所定車速を下回ると変速比を大きい側(Lo側)に変速している。この制御の目的は登坂路での駆動力確保であり、その制御時の目標エンジン回転数(目標入力回転数)は油圧の応答性を考慮し、車両停止までに変速比を最大変速比γmaxまで変速できるように設定されている。ここで、最大変速比γmaxまでの変速に必要な油圧を確保するには油圧オイルポンプ(エンジン駆動のオイルポンプ)の仕事量を多くする必要があって燃料消費率(燃費)が低下することから、平坦路や路面勾配が小さい走行路の場合(登坂路ほどの発進駆動力を確保する必要がない場合)に、最大変速比γmaxへの変速を行うと燃費の低下が懸念される。
【0008】
本発明はそのような実情を考慮してなされたもので、登坂路での発進時の駆動力を確保しながら、燃費の改善を図ることが可能な車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、エンジン及び自動変速機と、前記エンジンと自動変速機(例えば無段変速機)との間に配設された流体伝動装置(例えばトルクコンバータ)と、前記流体伝動装置の入力側と出力側とを直結するロックアップクラッチとが搭載された車両に適用され、所定車速を下回った場合に前記ロックアップクラッチを解放し、車両停止時までの間に前記自動変速機の変速比を大きい側(Lo側)に変速する制御が実行可能な車両の制御装置を前提としており、このような車両の制御装置において、路面勾配が正方向に大きいほど車両停止時の目標変速比を大きい側(Lo側)に設定することを技術的特徴としている。
【0010】
本発明によれば、路面勾配が大きいほど車両停止時の目標変速比を大きい側(Lo側)に設定しているので、路面勾配が小さい場合は大きい場合と比較して車両停止時の目標変速比を小さくすることができる。これにより路面勾配が小さい場合(平坦路や緩やかな登坂路の場合)には、車両減速時においてHi側の変速比で走行できる範囲を広げることができる。すなわち、従来制御では、路面勾配の大きさに関係なく、車両停止時の目標変速比を最大変速比γmaxに設定しているので、平坦路等においても急登坂路と同様なタイミングで変速比をHi側からLo側に変速している。これに対し、上述の如く路面勾配が小さい場合は大きい場合と比較して車両停止時の目標変速比を小さくすることにより、平坦路や緩やかな登坂路の場合には変速タイミングを遅らすことができ、車両減速時において変速比をHi側に維持できる範囲を広げることができる。このように変速比をHi側に維持できる範囲が広がることにより燃費の改善を図ることができる。また、本発明では、急登坂路などの路面勾配が大きい場合には、車両停止時の目標変速比を最大変速比γmaxにすることで車両発進時の駆動力を確保することができる。このように、本発明によれば、登坂路での発進時の駆動力を確保しながら、燃費の改善を図ることができる。
【0011】
本発明において、路面勾配が正方向に大きいほど、車両減速時においてロックアップクラッチを解放する車速(L/U−off車速)を高く設定するようにしてもよい。このように路面勾配が大きいほどロックアップクラッチを解放する車速を高く設定すること、つまり、路面勾配が小さいほどロックアップクラッチを開放する車速を低くすることによって、路面勾配が小さい場合にはフューエルカット領域を拡大することが可能になるので、燃費をより効果的に向上させることができる。
【0012】
本発明において、車両停止時の自動変速機(無段変速機)の実変速比が目標変速比よりも小さい場合は、その実変速比と目標変速比との差に応じて車両発進時のエンジンの駆動力を増大させるようにしてもよい。このように、車両停止時に自動変速機の実変速比が目標変速比まで戻らない場合は、その変速戻り不足分に相当するエンジン駆動力(具体的にはスロットル開度)を増大させることにより、車両発進時の駆動力を十分に確保することが可能になるので、ドライバのフィーリング(ドライバビリティ)が損なわれることがなくなる。
【0013】
本発明において、油圧式の自動変速機と電動オイルポンプとを備えさせ、目標変速比への変速時に油圧が不足する場合には、電動オイルポンプの作動により油圧を増大させるという構成を採用してもよい。このように電動オイルポンプの作動(EOPアシスト実行)により油圧を増大させることによって、エンジンにて駆動されるオイルポンプでは油圧が不足する場合あっても、その油圧不足分を補うことができるので、車両停止時の自動変速機の実変速比を目標変速比にまで確実に変速することが可能になる。
【0014】
本発明において、油圧式の自動変速機と電動オイルポンプとを備えさせ、車両減速時に電動オイルポンプを作動して、ロックアップクラッチを解放する車速を低い側に設定するという構成を採用してもよい。このようにエンジンにて駆動されるオイルポンプに加えて電動オイルポンプを作動することにより、自動変速機の変速制御用の油圧がアップし、その油圧アップに相当する分だけHi側からLo側への変速速度が速くなるので、ロックアップクラッチを開放する車速(L/U−off車速)を低速側に設定することができる。これによって燃費の向上を図ることができる。
【発明の効果】
【0015】
本発明によれば、路面勾配が大きいほど車両停止時の目標変速比を大きい側に設定しているので、登坂路での発進時の駆動力を確保しながら、燃費の改善を図ることができる。
【図面の簡単な説明】
【0016】
【図1】本発明を適用する車両の一例を示す概略構成図である。
【図2】油圧制御回路のうちベルト式無段変速機のプライマリプーリの油圧アクチュエータを制御する油圧制御回路の回路構成図である。
【図3】油圧制御回路のうちベルト式無段変速機のベルトの挟圧力を制御する油圧制御回路の回路構成図である。
【図4】ベルト式無段変速機の変速制御に用いるマップの一例を示す図である。
【図5】ベルト式無段変速機のベルト挟圧力制御に用いるマップの一例を示す図である。
【図6】ロックアップクラッチを係合・解放制御するロックアップ制御回路ロックアップ制御回路の回路構成図である。
【図7】ECU等の制御系の構成を示すブロック図である。
【図8】コースト走行時(減速走行時)の変速制御に用いるマップの一例を示す図である。
【図9】車両停止時の制御の一例を示すフローチャートである。
【図10】車両停止時の制御の一例を示すフローチャートである。
【図11】駆動力補正制御の一例を示すフローチャートである。
【図12】スロットル開度補正量の算出に用いるマップの一例を示す図である。
【図13】EOPアシスト制御の一例を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態を図面に基づいて説明する。
【0018】
図1は本発明を適用する車両の一例を示す概略構成図である。
【0019】
この例の車両は、FF(フロントエンジン・フロントドライブ)型車両であって、走行用動力源であるエンジン(内燃機関)1、流体伝動装置としてのトルクコンバータ2、前後進切替装置3、ベルト式無段変速機(CVT)4、減速歯車装置5、差動歯車装置6、及び、ECU8などが搭載されており、そのECU8により実行されるプログラムによって本発明の車両の制御装置が実現される。
【0020】
エンジン1の出力軸であるクランクシャフト11はトルクコンバータ2に連結されており、エンジン1の出力が、トルクコンバータ2から前後進切替装置3、ベルト式無段変速機4及び減速歯車装置5を介して差動歯車装置6に伝達され、左右の駆動輪7へ分配される。これらエンジン1、トルクコンバータ2、前後進切替装置3、ベルト式無段変速機4、及び、ECU8の各部について以下に説明する。
【0021】
−エンジン−
エンジン1は、例えば多気筒ガソリンエンジンである。エンジン1に吸入される吸入空気量は電子制御式のスロットルバルブ12により調整される。スロットルバルブ12は運転者のアクセルペダル操作とは独立してスロットル開度を電子的に制御することが可能であり、その開度(スロットル開度)はスロットル開度センサ102によって検出される。また、エンジン1の冷却水温は水温センサ103によって検出される。
【0022】
スロットルバルブ12のスロットル開度はECU8によって駆動制御される。具体的には、エンジン回転数センサ101によって検出されるエンジン回転数Ne、及び、運転者のアクセルペダル踏み込み量(アクセル操作量Pap)等のエンジン1の運転状態に応じた最適な吸入空気量(目標吸気量)が得られるようにスロットルバルブ12のスロットル開度を制御している。より詳細には、スロットル開度センサ102を用いてスロットルバルブ12の実際のスロットル開度を検出し、その実スロットル開度が、上記目標吸気量が得られるスロットル開度(目標スロットル開度)に一致するようにスロットルバルブ12のスロットルモータ13をフィードバック制御している。
【0023】
−トルクコンバータ−
トルクコンバータ2は、図1に示すように、入力側のポンプインペラ21、出力側のタービンランナ22、及び、トルク増幅機能を発現するステータ23などを備えており、ポンプインペラ21とタービンランナ22との間で流体(作動油)を介して動力伝達を行う流体伝動装置である。ポンプインペラ21はエンジン1のクランクシャフト11に連結されている。タービンランナ22はタービンシャフト27を介して前後進切替装置3に連結されている。
【0024】
トルクコンバータ2には、当該トルクコンバータ2の入力側と出力側とを直結するロックアップクラッチ24が設けられている。ロックアップクラッチ24は、係合側油室25内の油圧と解放側油室26内の油圧との差圧(ロックアップ差圧)を制御することにより完全係合・半係合(スリップ状態での係合)または解放される。
【0025】
ロックアップクラッチ24を完全係合させることにより、ポンプインペラ21とタービンランナ22とが一体回転する。また、ロックアップクラッチ24を所定のスリップ状態(半係合状態)で係合させることにより、駆動時には所定のスリップ量でタービンランナ22がポンプインペラ21に追随して回転する。一方、ロックアップ差圧を負に設定することによりロックアップクラッチ24は解放状態となる。このロックアップクラッチ24の係合または解放は、ECU8及び油圧制御回路20によって制御される。
【0026】
そして、トルクコンバータ2にはポンプインペラ21に連結して駆動される機械式のオイルポンプ(油圧発生源)10が設けられている。このオイルポンプ10はエンジン1によって駆動される。
【0027】
−前後進切替装置−
前後進切替装置3は、図1に示すように、ダブルピニオン型の遊星歯車機構30、フォワードクラッチ(前進用クラッチ)C1及びリバースブレーキ(後進用ブレーキ)B1を備えている。
【0028】
遊星歯車機構30のサンギヤ31はトルクコンバータ2のタービンシャフト27に一体的に連結されており、キャリア33はベルト式無段変速機4の入力軸40に一体的に連結されている。これらキャリア33とサンギヤ31とはフォワードクラッチC1を介して選択的に連結されている。また、リングギヤ32はリバースブレーキB1を介してハウジング300に選択的に固定されるようになっている。
【0029】
フォワードクラッチC1及びリバースブレーキB1は、油圧制御回路20によって係合・解放される油圧式の摩擦係合装置であって、フォワードクラッチC1が係合され、リバースブレーキB1が解放されることにより、前後進切替装置3が一体回転状態となって前進用動力伝達経路が成立(達成)し、この状態で、前進方向の駆動力がベルト式無段変速機4側へ伝達される。
【0030】
一方、リバースブレーキB1が係合され、フォワードクラッチC1が解放されると、前後進切替装置3によって後進用動力伝達経路が成立(達成)する。この状態で、ベルト式無段変速機4の入力軸40がタービンシャフト27に対して逆方向へ回転し、この後進方向の駆動力がベルト式無段変速機4側へ伝達される。また、フォワードクラッチC1及びリバースブレーキB1がともに解放されると、前後進切替装置3は動力伝達を遮断するニュートラル(遮断状態)になる。
【0031】
−ベルト式無段変速機−
ベルト式無段変速機4は、図1に示すように、入力側のプライマリプーリ41、出力側のセカンダリプーリ42、及び、これらプライマリプーリ41とセカンダリプーリ42とに巻き掛けられた金属製のベルト43などを備えている。
【0032】
プライマリプーリ41は、有効径が可変な可変プーリであって、入力軸40に固定された固定シーブ411と、入力軸40に軸方向のみの摺動が可能な状態で配設された可動シーブ412とによって構成されている。セカンダリプーリ42も同様に有効径が可変な可変プーリであって、出力軸44に固定された固定シーブ421と、出力軸44に軸方向のみの摺動が可能な状態で配設された可動シーブ422とによって構成されている。
【0033】
プライマリプーリ41の可動シーブ412側には、固定シーブ411と可動シーブ412との間のV溝幅を変更するための油圧アクチュエータ413が配置されている。また、セカンダリプーリ42の可動シーブ422側にも同様に、固定シーブ421と可動シーブ422との間のV溝幅を変更するための油圧アクチュエータ423が配置されている。
【0034】
以上の構造のベルト式無段変速機4において、プライマリプーリ41の油圧アクチュエータ413の油圧を制御することにより、プライマリプーリ41及びセカンダリプーリ42の各V溝幅が変化してベルト43の掛かり径(有効径)が変更され、変速比γ(γ=入力軸回転数(プライマリプーリ回転数)Nin/出力回転数(セカンダリプーリ回転数)Nout)が連続的に変化する。また、セカンダリプーリ42の油圧アクチュエータ423の油圧は、ベルト滑りが生じない所定の挟圧力でベルト43が挟圧されるように制御される。これらの制御はECU8及び油圧制御回路20によって実行される。
【0035】
−油圧制御回路−
油圧制御回路20は、図1に示すように、変速速度制御部20a、ベルト挟圧力制御部20b、ライン圧制御部20c、ロックアップクラッチ24の係合(完全係合及び半係合)または解放を制御するロックアップ制御部20d、前後進切替装置3のフォワードクラッチC1及びリバースブレーキB1の係合または解放を制御するクラッチ圧力制御部20e、並びに、マニュアルバルブ20fなどを備えている。なお、クラッチ圧力制御部20eには、リニアソレノイドバルブSLTにて制御されたライン圧が供給される。
【0036】
また、油圧制御回路20を構成する変速速度制御用の変速制御ソレノイドバルブDS1及び変速制御ソレノイドバルブDS2、ベルト挟圧力制御用のリニアソレノイドバルブSLS、ライン圧制御用のリニアソレノイドバルブSLT、並びに、ロックアップ係合圧制御用のデューティソレノイドバルブDSUにはECU8からの制御信号が供給される。
【0037】
次に、油圧制御回路20のうち、ベルト式無段変速機4のプライマリプーリ41の油圧アクチュエータ413の油圧制御回路(変速速度制御部20aの具体的な油圧回路構成)、及び、セカンダリプーリ42の油圧アクチュエータ423の油圧制御回路(ベルト挟圧力制御部20bの具体的な油圧回路構成)について、図2及び図3を参照して説明する。
【0038】
まず、図3に示すように、オイルポンプ10が発生した油圧はプライマリレギュレータバルブ203により調圧されてライン圧PLが生成される。プライマリレギュレータバルブ203には、リニアソレノイドバルブ(SLT)201が出力する制御油圧がクラッチアプライコントロールバルブ204を介して供給され、その制御油圧をパイロット圧として作動する。
【0039】
なお、クラッチアプライコントロールバルブ204の切り替えにより、リニアソレノイドバルブ(SLS)202からの制御油圧がプライマリレギュレータバルブ203に供給され、その制御油圧をパイロット圧としてライン圧PLが調圧される場合もある。これらリニアソレノイドバルブ(SLT)201及びリニアソレノイドバルブ(SLS)202には、ライン圧PLを元圧としてモジュレータバルブ205にて調圧された油圧が供給される。
【0040】
リニアソレノイドバルブ(SLT)201は、ECU8が出力するDuty信号によって決まる電流値に応じて制御油圧を出力する。リニアソレノイドバルブ(SLT)201はノーマルオープンタイプのソレノイドバルブである。
【0041】
また、リニアソレノイドバルブ(SLS)202は、ECU8が出力するDuty信号によって決まる電流値に応じて制御油圧を出力する。このリニアソレノイドバルブ(SLS)202も上記リニアソレノイドバルブ(SLT)201と同様にノーマルオープンタイプのソレノイドバルブである。
【0042】
なお、図2及び図3に示す油圧制御回路において、モジュレータバルブ206は、上記モジュレータバルブ205が出力する油圧を一定の圧力に調圧して、後述する変速制御ソレノイドバルブ(DS1)304、変速制御ソレノイドバルブ(DS2)305、及び、ベルト挟圧力制御バルブ303などに供給する。
【0043】
[変速制御]
次に、プライマリプーリ41の油圧アクチュエータ413の油圧制御回路について説明する。図2に示すように、プライマリプーリ41の油圧アクチュエータ413にはアップシフト用変速制御バルブ301が接続されている。
【0044】
アップシフト用変速制御バルブ301には、バルブボディ内において軸方向に移動可能なスプール弁子311が設けられている。スプール弁子311の一端側(図2の上端側)にはスプリング(圧縮コイルばね)312が配置されており、このスプール弁子311を挟んでスプリング312とは反対側の端部に、第1油圧ポート315が形成されている。また、スプリング312が配置されている上記の一端側に第2油圧ポート316が形成されている。
【0045】
第1油圧ポート315には、ECU8が出力するDuty信号(DS1変速Duty(アップシフトDuty))によって決まる電流値に応じて制御油圧を出力する変速制御ソレノイドバルブ(DS1)304が接続されており、その変速制御ソレノイドバルブ(DS1)304が出力する制御油圧が第1油圧ポート315に印加される。第2油圧ポート316には、ECU8が出力するDuty信号(DS2変速Duty(ダウンシフトDuty))によって決まる電流値に応じて制御油圧を出力する変速制御ソレノイドバルブ(DS2)305が接続されており、その変速制御ソレノイドバルブ(DS2)305が出力する制御油圧が第2油圧ポート316に印加される。
【0046】
さらに、アップシフト用変速制御バルブ301には、ライン圧PLが供給される入力ポート313、プライマリプーリ41の油圧アクチュエータ413に接続(連通)される入出力ポート314及び出力ポート317が形成されており、スプール弁子311がアップシフト位置(図2の右側位置)にあるときには、出力ポート317が閉鎖され、ライン圧PLが入力ポート313から入出力ポート314を経てプライマリプーリ41の油圧アクチュエータ413に供給される。一方、スプール弁子311が閉じ位置(図2の左側位置)にあるときには、入力ポート313が閉鎖され、プライマリプーリ41の油圧アクチュエータ413が入出力ポート314を介して出力ポート317に連通する。
【0047】
ダウンシフト用変速制御バルブ302には、バルブボディ内において軸方向に移動可能なスプール弁子321が設けられている。スプール弁子321の一端側(図2の下端側)にはスプリング(圧縮コイルばね)322が配置されているとともに、その一端側に第1油圧ポート326が形成されている。また、スプール弁子321を挟んでスプリング322とは反対側の端部に第2油圧ポート327が形成されている。第1油圧ポート326には、上記変速制御ソレノイドバルブ(DS1)304が接続されており、その変速制御ソレノイドバルブ(DS1)304が出力する制御油圧が第1油圧ポート326に印加される。第2油圧ポート327には、上記変速制御ソレノイドバルブ(DS2)305が接続されており、その変速制御ソレノイドバルブ(DS2)305が出力する制御油圧が第2油圧ポート327に印加される。
【0048】
さらに、ダウンシフト用変速制御バルブ302には、入力ポート323、入出力ポート324及び排出ポート325が形成されている。入力ポート323にはバイパスコントロールバルブ306が接続されており、そのバイパスコントロールバルブ306にてライン圧PLを調圧した油圧が供給される。そして、このようなダウンシフト用変速制御バルブ302において、スプール弁子321がダウンシフト位置(図2の左側位置)にあるときには入出力ポート324が排出ポート325に連通する。一方、スプール弁子321が閉じ位置(図2の右側位置)にあるときには入出力ポート324が閉鎖される。なお、ダウンシフト用変速制御バルブ302の入出力ポート324は、アップシフト用変速制御バルブ301の出力ポート317に接続されている。
【0049】
以上の図2の油圧制御回路において、ECU8が出力するDS1変速Duty(アップシフト変速指令)に応じて変速制御ソレノイドバルブ(DS1)304が作動し、その変速制御ソレノイドバルブ(DS1)304が出力する制御油圧がアップシフト用変速制御バルブ301の第1油圧ポート315に供給されると、その制御油圧に応じた推力によって、スプール弁子311がアップシフト位置側(図2の上側)に移動する。このスプール弁子311の移動(アップシフト側への移動)により、作動油(ライン圧PL)が制御油圧に対応する流量で入力ポート313から入出力ポート314を経てプライマリプーリ41の油圧アクチュエータ413に供給されるとともに、出力ポート317が閉鎖されてダウンシフト変速制御バルブ302への作動油の流通が阻止される。これによって変速制御圧が高められ、プライマリプーリ41のV溝幅が狭くなって変速比γが小さくなる(アップシフト)。
【0050】
なお、変速制御ソレノイドバルブ(DS1)304が出力する制御油圧がダウンシフト用変速制御バルブ302の第1油圧ポート326に供給されると、スプール弁子321が図2の上側に移動し、入出力ポート324が閉鎖される。
【0051】
一方、ECU8が出力するDS2変速Duty(ダウンシフト変速指令)に応じて変速制御ソレノイドバルブ(DS2)305が作動し、その変速制御ソレノイドバルブ(DS2)305が出力する制御油圧がアップシフト用変速制御バルブ301の第2油圧ポート316に供給されると、その制御油圧に応じた推力によって、スプール弁子311がダウンシフト位置側(図2の下側)に移動する。このスプール弁子311の移動(ダウンシフト側への移動)により、プライマリプーリ41の油圧アクチュエータ413内の作動油が制御油圧に対応する流量でアップシフト用変速制御バルブ301の入出力ポート314に流入する。このアップシフト用変速制御バルブ301に流入した作動油は出力ポート317及びダウンシフト用変速制御バルブ302の入出力ポート324を経て排出ポート325から排出される。これによって変速制御圧が低められ、入力側可変プーリ42のV溝幅が広くなって変速比γが大きくなる(ダウンシフト)。
【0052】
なお、変速制御ソレノイドバルブ(DS2)305が出力する制御油圧がダウンシフト用変速制御バルブ302の第2油圧ポート327に供給されると、スプール弁子321が図2の下側に移動し、入出力ポート324と排出ポート325とが連通する。
【0053】
以上のように、変速制御ソレノイドバルブ(DS1)304から制御油圧が出力されると、アップシフト用変速制御バルブ301から作動油がプライマリプーリ41の油圧アクチュエータ413に供給されて変速制御圧が連続的にアップシフトされる。また、変速制御ソレノイドバルブ(DS2)305から制御油圧が出力されると、プライマリプーリ41の油圧アクチュエータ413内の作動油がダウンシフト用変速制御バルブ302の排出ポート325から排出されて変速制御圧が連続的にダウンシフトされる。
【0054】
そして、この例では、例えば図4に示すように、運転者の出力要求量を表すアクセル操作量Pap(アクセル開度Pap)及び車速Vをパラメータとして予め設定された変速線マップから入力側の目標入力回転数Nintを算出し、実際の入力回転数Nin(実入力回転数Ni)が目標入力回転数Nintと一致するように、それらの偏差(Nint−Nin)に応じてベルト式無段変速機4の変速制御、すなわち、プライマリプーリ41の油圧アクチュエータ413に対する作動油の供給・排出によって変速制御圧(プライマリシーブ圧Pin)が制御され、変速比γが連続的に変化する。
【0055】
なお、図4の変速線マップは変速条件に相当し、ECU8のROM82(図7参照)内に記憶されている。この図4のマップにおいて、車速Vが小さくてアクセル操作量Papが大きい程、大きな変速比γになる目標入力回転数Nintが設定されるようになっている。また、車速Vは出力回転数Noutに対応するため(車速V=Nout×[2π×タイヤ半径]/デフ比)、プライマリプーリ回転数(入力軸回転数)Ninの目標値である目標入力回転数Nintは目標変速比γtに対応し、ベルト式無段変速機4の最小変速比γminと最大変速比γmaxの範囲内で設定されている。
【0056】
[ベルト挟圧力制御]
次に、セカンダリプーリ42の油圧アクチュエータ423の油圧制御回路について図3を参照して説明する。
【0057】
図3に示すように、セカンダリプーリ42の油圧アクチュエータ423にはベルト挟圧力制御バルブ303が接続されている。
【0058】
ベルト挟圧力制御バルブ303には、バルブボディ内において軸方向に移動可能なスプール弁子331が設けられている。スプール弁子331の一端側(図3の下端側)にはスプリング(圧縮コイルばね)332が配置されているとともに、その一端側に第1油圧ポート335が形成されている。また、スプール弁子331を挟んでスプリング332とは反対側の端部に第2油圧ポート336が形成されている。
【0059】
第1油圧ポート335にはリニアソレノイドバルブ(SLS)202が接続されており、そのリニアソレノイドバルブ(SLS)202が出力する制御油圧が第1油圧ポート335に印加される。第2油圧ポート336にはモジュレータバルブ206からの油圧が印加される。
【0060】
さらに、ベルト挟圧力制御バルブ303には、ライン圧PLが供給される入力ポート333、及び、セカンダリプーリ42の油圧アクチュエータ423に接続(連通)される出力ポート334が形成されている。
【0061】
この図3の油圧制御回路において、セカンダリプーリ42の油圧アクチュエータ423に所定の油圧が供給されている状態から、リニアソレノイドバルブ(SLS)202が出力する制御油圧が増大すると、ベルト挟圧力制御バルブ303のスプール弁子331が図3の上側に移動する。この場合、セカンダリプーリ42の油圧アクチュエータ423に供給される油圧が増大し、ベルト挟圧力が増大する。一方、セカンダリプーリ42の油圧アクチュエータ423に所定の油圧が供給されている状態から、リニアソレノイドバルブ(SLS)202が出力する制御油圧が低下すると、ベルト挟圧力制御バルブ303のスプール弁子331が図3の下側に移動する。この場合、セカンダリプーリ42の油圧シリンダに供給される油圧が低下し、ベルト挟圧力が低下する。
【0062】
このようにして、リニアソレノイドバルブ(SLS)202が出力する制御油圧をパイロット圧としてライン圧PLを調圧制御してセカンダリプーリ42の油圧アクチュエータ423に供給することによってベルト挟圧力が増減する。
【0063】
そして、この例では、例えば図5に示すように、伝達トルクに対応するアクセル開度Pap及び変速比γ(γ=Nin/Nout)をパラメータとし、ベルト滑りが生じないように予め設定された必要油圧(ベルト挟圧力に相当)のマップに従って、リニアソレノイドバルブ(SLS)202が出力する制御油圧を制御することにより、ベルト式無段変速機4のベルト挟圧力、つまり、セカンダリプーリ42の油圧アクチュエータ423の油圧を調圧制御することによって行われる。図5のマップは挟圧力制御条件に相当し、ECU8のROM82(図7参照)内に記憶されている。
【0064】
[ロックアップ制御回路]
次に、油圧制御回路20のうちロックアップクラッチ24を係合・解放制御するロックアップ制御回路の一例を図6を参照して説明する。
【0065】
この例のロックアップ制御回路は、ロックアップコントロールバルブ501、第2調圧弁520、及び、ロックアップ差圧制御用ソレノイドバルブ(DSU)521などを備えている。
【0066】
ロックアップコントロールバルブ501には、一対の第1ライン圧ポート502及び第2ライン圧ポート503が設けられており、さらに係合側ポート504、解放側ポート505、及び、信号圧ポート506が設けられている。第1ライン圧ポート502及び第2ライン圧ポート503には、第2調圧弁520からの元圧PL2が供給される。第2調圧弁520は、油圧制御回路20(図1参照)内の制御圧(ライン圧PL)を調圧してロックアップコントロールバルブ501に供給する。
【0067】
ロックアップコントロールバルブ501の係合側ポート504及び解放側ポート505は、それぞれ、トルクコンバータ2の係合側油室25及び解放側油室26に接続されている。また、ロックアップコントロールバルブ501には、ロックアップ係合油圧PLUが供給されるフィードバック油室510が設けられている。
【0068】
ロックアップ差圧制御用ソレノイドバルブ(DSU)521はリニアソレノイドバルブであって、励磁状態のときに制御信号圧PDSUを出力し、非励磁状態のときに制御信号圧PDSUの出力を停止する。ロックアップ差圧制御用ソレノイドバルブ(DSU)521は、ECU8から出力されるロックアップ差圧指示値PDに従って励磁電流がDuty制御され、出力制御信号圧PDSUが連続的に変化する。ロックアップ差圧制御用ソレノイドバルブ(DSU)521から出力される制御信号圧PDSUはロックアップコントロールバルブ501の信号圧ポート506に供給される。
【0069】
以上の図6に示すロックアップ制御回路において、ECU8から出力されるロックアップ差圧指示値PDに従ってロックアップ差圧制御用ソレノイドバルブ(DSU)521が励磁状態となり、その制御信号圧PDSUがロックアップコントロールバルブ501の信号圧ポート506に供給されると、図6の中心線より右側半分に示すように、ロックアップコントロールバルブ501のスプール弁子507が圧縮コイルばね508の付勢力に抗して下方へ移動した状態(ON状態)となって、第1ライン圧ポート502と係合側ポート504とが連通する。これによって、ロックアップ係合油圧PLUが係合側油室25へ供給されるとともに、解放側ポート505がドレーンポート509に連通することにより、解放側油室26内の作動油がドレーンされ、ロックアップクラッチ24が係合(ON)する。
【0070】
さらに、ロックアップコントロールバルブ501のフィードバック油室510には、ロックアップ係合油圧PLUが供給されるので、そのロックアップ係合油圧PLUが制御信号圧PDSUと釣り合うようにスプール弁子507が移動する。これにより、制御信号圧PDSUつまりロックアップ差圧指示値PDに応じて、ロックアップクラッチ24の係合側油室25内の油圧PONと解放側油室26内の油圧POFFとの差圧ΔP(ロックアップ差圧ΔP)を連続的に制御することが可能となり、そのロックアップ差圧ΔPに応じてロックアップクラッチ24の係合トルクつまり係合力を連続的に変化させることができる。
【0071】
一方、ロックアップ差圧制御用ソレノイドバルブ(DSU)521が非励磁状態となって、ロックアップ差圧制御用ソレノイドバルブ(DSU)521からの制御信号圧PDSUの出力が停止すると、ロックアップコントロールバルブ501は、図6の中心線より左側半分に示すように、圧縮コイルばね508の付勢力によってスプール弁子507が上方へと移動して原位置に移動した状態(OFF状態)となる。
【0072】
このOFF状態では、第2ライン圧ポート503と解放側ポート505とが連通し、元圧PL2がロックアップクラッチ24の解放側油室26に供給されるとともに、係合側ポート504が排出ポート511に連通する。これにより、ロックアップクラッチ24の係合側油室25内の作動油が排出ポート511から排出され、ロックアップクラッチ24が解放(OFF)状態となる。排出ポート511から排出された作動油は、図示しないが、オイルクーラを経てオイルパン等へ戻されるようになっており、そのオイルクーラにより作動油が冷却されるようになっている。なお、余剰の作動油は、クーラバイパスバルブからオイルパン等へ戻される。
【0073】
なお、ロックアップコントロールバルブ501にはバックアップポート512が設けられている。このバックアップポート512には上記した変速制御ソレノイドバルブ(DS2)305の出力油圧PDS2が供給される。バックアップポート512に変速制御ソレノイドバルブ(DS2)305からの油圧PDS2が供給されると、ロックアップコントロールバルブ501の信号圧ポート506への制御信号圧PDSUの供給に関わらず、ロックアップコントロールバルブ501をOFF状態に維持してロックアップクラッチ24を強制的に解放する。
【0074】
−ECU−
ECU8は、図7に示すように、CPU81、ROM82、RAM83及びバックアップRAM84などを備えている。
【0075】
ROM82には、各種制御プログラムや、それら各種制御プログラムを実行する際に参照されるマップ等が記憶されている。CPU81は、ROM82に記憶された各種制御プログラムやマップに基づいて演算処理を実行する。また、RAM83はCPU81での演算結果や各センサから入力されたデータ等を一時的に記憶するメモリであり、バックアップRAM84はエンジン1の停止時にその保存すべきデータ等を記憶する不揮発性のメモリである。
【0076】
これらCPU81、ROM82、RAM83、及び、バックアップRAM84はバス87を介して互いに接続されるとともに、入力インターフェース85及び出力インターフェース86に接続されている。
【0077】
入力インターフェース85には、エンジン回転数センサ101、スロットル開度センサ102、水温センサ103、タービンシャフト27の回転数を検出して出力するタービン回転数センサ104、プライマリプーリ41の回転数を検出して信号を出力する入力回転数センサ105、セカンダリプーリ42の回転数を検出して出力する出力回転数センサ106、アクセル開度センサ107、CVT油温センサ108、ブレーキペダルセンサ109、シフトレバー9のレバーポジション(操作位置)を検出するレバーポジションセンサ110、走行路面の勾配を検出する勾配センサ111、及び、油圧制御回路20の作動油のライン圧PLを検出する油圧センサ112などが接続されており、その各センサの出力信号、つまり、エンジン1の回転数(エンジン回転数)Ne、スロットルバルブ12のスロットル開度Tap、エンジン1の冷却水温Tw、タービンシャフト27の回転数(タービン回転数)Nt、入力回転数(プライマリプーリ回転数)Nin、出力回転数(セカンダリプーリ回転数)Nout、アクセルペダルの操作量(アクセル関度)Pap、油圧制御回路20の油温(CVT油温Thc)、常用ブレーキであるフットブレーキの操作の有無(ブレーキON・OFF)、車両走行路の路面勾配θ、油圧回路20の油圧(ライン圧PL)、及び、シフトレバー9のレバーポジション(操作位置)などを表す信号がECU8に供給される。
【0078】
出力インターフェース86には、スロットルモータ13、燃料噴射装置14、点火装置15及び油圧制御回路20などが接続されている。
【0079】
ここで、ECU8に供給される信号のうち、タービン回転数Ntは、前後進切替装置3のフォワードクラッチC1が係合する前進走行時にはプライマリプーリ回転数(入力軸回転数)Ninと一致し、出力回転数(セカンダリプーリ回転数)Noutは車速Vに対応する。また、アクセル操作量Papは運転者の出力要求量を表している。
【0080】
また、シフトレバー9は、駐車のためのパーキング位置「P」、後進走行のためのリバース位置「R」、動力伝達を遮断するニュートラル位置「N」、前進走行のためのドライブ位置「D」、前進走行時にベルト式無段変速機4の変速比γを手動操作で増減できるマニュアル位置「M」などの各位置に選択的に操作されるようになっている。
【0081】
マニュアル位置「M」には、変速比γを増減するためのダウンシフト位置やアップシフト位置、あるいは、変速範囲の上限(変速比γが小さい側)が異なる複数の変速レンジを選択できる複数のレンジ位置等が備えられている。
【0082】
レバーポジションセンサ110は、例えば、パーキング位置「Pレンジ」、リバース位置「Rレンジ」、ニュートラル位置「Nレンジ」、ドライブ位置「Dレンジ」、マニュアル位置「Mレンジ」やアップシフト位置、ダウンシフト位置、あるいはレンジ位置等へシフトレバー9が操作されたことを検出する複数のON・OFFスイッチ等を備えている。なお、変速比γを手動操作で変更するために、シフトレバー9とは別にステアリングホイール等にダウンシフトスイッチやアップシフトスイッチ、あるいはレバー等を設けることも可能である。
【0083】
そして、ECU8は、上記した各種センサの検出信号に基づいて、燃料噴射制御(インジェクタの駆動制御)、点火時期制御(点火プラグの点火時期制御)、スロットルバルブ12のスロットルモータ13の駆動制御などのエンジン1の制御、上述したベルト式無段変速機4の変速速度制御及びベルト挟圧力制御、並びに、ロックアップクラッチ24の係合・解放制御などを実行する。さらに、ECU8は、下記の[フューエルカット制御]、[減速ロックアップスリップ制御]、及び、[車両停止時の制御]を実行する。
【0084】
−フューエルカット制御−
ECU8は、所定の条件が成立したときにフューエルカット制御を実行する。フューエルカット制御は、燃費を向上させるためにエンジン1への燃料供給を停止する制御であって、車両減速時(アクセルオフ)で、かつ、エンジン回転数Neがフューエルカット開始回転数以上であるときにエンジン1への燃料噴射を停止(インジェクタからの燃料噴射を停止)し、エンジン回転数Neがフューエルカット復帰回転数(フューエルカット停止のための燃料噴射復帰判定回転数)よりも低下したときにエンジンへの燃料噴射を再開する制御である。なお、フューエルカット復帰回転数は、耐エンスト(エンジンストール)性を確保することが可能であり、エンジン1の安定した回転を維持することが可能な回転数に設定されている。また、フューエルカット開始回転数は、フューエルカット復帰回転数よりも所定量だけ高い回転数に設定されている。
【0085】
−減速ロックアップスリップ制御−
ECU8は、車両減速時(コースト走行時)のフューエルカット中に、ロックアップクラッチ24に微小な滑りを与える減速ロックアップスリップ制御(フレックスロックアップ制御)を実行する。具体的には、ECU8は、アクセル開度センサ107の出力信号から得られるアクセル開度Papが略零(Pap≒0)であり、減速走行する前進走行時において生じる駆動輪側からの逆入力をエンジン1側へ伝達するとき(被駆動時)、つまりエンジンブレーキ作用が得られている状態のときにロックアップクラッチ24に微小な滑りを与える制御を実行する。このような減速ロックアップスリップ制御を実行すると、タービン回転速度NT及びエンジン回転速度Neが車両の減速に従って緩やかに減少するとともに、エンジン回転速度Neがタービン回転速度Nt付近まで引き上げられるため、エンジン1に対する燃料供給量を抑制する制御状態(フューエルカット状態)がさらに長い期間維持されて燃費が向上する。
【0086】
−車両停止時の制御−
次に、ECU8が実行する車両停止時の制御について説明する。
【0087】
まず、車両停止時の制御に用いるマップについて図8を参照して説明する。
【0088】
図8のマップは、Dレンジでのコースト走行時(減速走行時)の目標入力回転数Nintを、車速V(アクセル操作量Pap=0)をパラメータとして算出するための変速線マップであって、4本の変速線Ls0,Ls1,Ls2,Ls3が設定されている。
【0089】
変速線Ls0は、走行路が平坦路(路面勾配θ=0°)であるときに目標入力回転数Nintの算出に用いる変速線であり、変速線Ls1は、走行路が緩登坂路であるときに目標入力回転数Nintの算出に用いる変速線である。また、変速線Ls2は、走行路が中登坂路(例えば路面勾配θが5°以上)であるときに目標入力回転数Nintの算出に用いる変速線であり、変速線Ls3は、走行路が急登坂路(例えば路面勾配θが10°以上)であるときに目標入力回転数Nintの算出に用いる変速線である。
【0090】
これら変速線Ls0,Ls1,Ls2,Ls3のうち、平坦路用の変速線Ls0及び緩登坂路用の変速線Ls1については、路面勾配が小さい場合(勾配=0も含む)には車両停止時に変速比を最大変速比γmaxに戻さなくても車両発進時の駆動力を確保できるという点を考慮し、車両停止時の目標変速比(最終目標変速比)γt0,γt1が最大変速比γmaxまで至らないような目標入力回転数Nintが設定されている。ただし、緩登坂路は平坦路よりも登り勾配が少し大きいので、緩登坂路用の最終目標変速比γt1が平坦路用の最終目標変速比γt0よりも大きい側(Lo側)の値となるように、緩登坂路用の変速線Ls1の最終目標入力回転数Nintを、平坦路用の変速線Ls0の最終目標入力回転数Nintよりも大きい側に設定している。なお、これら平坦路用の最終目標変速比γt0(最終目標入力回転数Nint)、及び、緩登坂路用の最終目標変速比γt1(最終目標入力回転数Nint)は、それぞれ、次回の車両発進時(平坦路や緩登坂路での発進時)に必要な駆動力を考慮して実験・シミュレーション等によって適合した値が設定されている。
【0091】
一方、中登坂路用の変速線Ls2は、その低車速域の目標入力回転数Nintが上記緩登坂路用の変速線Ls1の低車速域の目標入力回転数Nintに対して大きい側に設定されており、車両停止時までの間に最大変速比γmax(目標変速比γt2)に到達するような目標入力回転数Nintが設定されている。
【0092】
また、急登坂路用の変速線Ls3は、その低車速域の目標入力回転数Nintが上記中登坂路用の変速線Ls2の低車速域の目標入力回転数Nintに対して大きい側に設定されており、最大変速比γmax(目標変速比γt3)に変速するまでの時間が中登坂路の場合よりも短くなるように目標入力回転数Nintが設定されている。つまり、走行路が急登坂路である場合は、走行抵抗(減速度)が大きくてロックアップクラッチ24を解放(L/U−off)してから車両停止までの時間が短くなるという点を考慮して、中登坂路の場合よりも最大変速比γmaxに早く戻るように目標入力回転数Nintが設定されている。
【0093】
以上のように、図8に示す変速線マップでは、路面勾配が大きいほど(路面勾配が正方向に大きいほど)、目標変速比γt(目標入力回転数Nint)が大きくなる側(Lo側)に設定されている([平坦路:γt0]<[緩登坂路:γt1]<[中登坂路:γt2(γmax)・急登坂路:γt3(γmax)])。なお、図8に示す変速線マップはECU8のROM82内に記憶されている。
【0094】
また、図8に示す変速線マップにおいて、各変速線Ls0,Ls1,Ls2,Ls3上にプロットしている黒丸印は、それぞれ、ロックアップクラッチ24の係合限界(L/U係合限界)ポイント(入力回転数・車速ポイント)Ps0,Ps1,Ps2,Ps3である。これらL/U係合限界ポイントPs0〜Ps3の関係について説明すると、この図8に示すように、低車速域の目標入力回転数Nintが大きくなるほど、L/U係合限界ポイント(車速)は高車速側の値となる(Ps0<Ps1<Ps2<Ps3)。
【0095】
そして、この例では、上記L/U係合限界ポイントを考慮して、各走行路(平坦路・緩登坂路・中登坂路・急登坂路)毎にロックアップクラッチ24を解放する車速(L/U−off車速)Vs0,Vs1,Vs2,Vs3を設定している。
【0096】
具体的には、平坦路用のL/U−off車速Vs0については、上記L/U係合限界ポイントPs0よりも所定量(マージン分)だけ高車速側に設定している。緩登坂路用のL/U−off車速Vs1については、上記L/U係合限界ポイントPs1よりも所定量(マージン分)だけ高車速側に設定している。中登坂路用のL/U−off車速Vs2については、上記L/U係合限界ポイントPs2よりも所定量(マージン分)だけ高車速側に設定している。急登坂路用のL/U−off車速Vs3については、上記L/U係合限界ポイントPs3よりも所定量(マージン分)だけ高車速側に設定している。つまり、L/U−off車速Vs0〜Vs3については、路面勾配が大きいほどロックアップクラッチ24を解放する車速Vが高くなるように設定している(Vs0<Vs1<Vs2<Vs3)。これらL/U−off車速Vs0、Va1,Vs2,Vs3はECU8のROM82内に記憶されている。
【0097】
次に、車両停止時の制御の具体的な例について、図9及び図10のフローチャートを参照して説明する。図9及び図10の制御ルーチンはECU8において実行される。なお、図9及び図10には、上記した平坦路・緩登坂路・中登坂路・急登坂路での車両停止時の制御の一例を示している。
【0098】
図9及び図10の制御ルーチンは、アクセル開度Pap(アクセル開度センサ107の出力信号から認識)が「0」であり、かつ、車両減速時(出力回転数センサ105の出力信号(Nout)から認識)であるときに開始される。
【0099】
図9及び図10の制御ルーチンが開始されると、まずはステップST101において、勾配センサ111の出力信号に基づいて路面勾配θを取得する。次に、ステップST102において、上記ステップST101で取得した路面勾配θに基づいて走行路が「平坦路(θ=0)」であるか否かを判定し、その判定結果が否定判定(NO)である場合はステップST103に移行する。ステップST102の判定結果が肯定判定(YES)である場合はステップST111に進む。
【0100】
ステップST111では、図8の変速線マップに設定された変速線Ls0,Ls1,Ls2,Ls3のうち、平坦路用の変速線Ls0を選択する。
【0101】
次に、ステップST112において、現在の車速V(出力回転数センサ105の出力信号(Nout)から算出)と、上記した平坦路用のL/U−off車速Vs0とを比較し、現在の車速VがL/U−off車速Vs0を下回った時点([現在車速V<Vs0]となりステップST112の判定結果が肯定判定(YES)となった時点)でロックアップクラッチ24を解放する(ステップST113)。このロックアップクラッチ24の解放後で車両停止時までの間に、ベルト式無段変速機4の変速比が大きい側(Lo側)に変速されて実際の変速比γが最終目標変速比γt0となる。ただし、走行路が平坦路の場合、上述したように、実変速比が最大変速比γmaxまで戻らないようになっている。なお、この平坦路での車両減速時において、車速Vが上記平坦路用のL/U−off車速Vs0に到達するまで(ロックアップクラッチ24が係合中)は、実際の変速比γは最小変速比γminに維持される。
【0102】
そして、出力回転数センサ105の出力信号から算出される車速Vに基づいて車両が停止したか否かを判定し(ステップST114)、このステップST114の判定結果が肯定判定(YES)となったときに処理を終了する。
【0103】
また、上記ステップST102の判定結果が否定判定(NO)である場合(走行路が平坦路でない場合)は、ステップST103において、走行路が「緩登坂路」であるか否かを判定し、その判定結果が否定判定(NO)である場合は図10のステップST104に移行する。ステップST103の判定結果が肯定判定(YES)である場合(走行路が緩登坂路である場合)はステップST121に進む。
【0104】
ステップST121では、図8の変速線マップに設定された変速線Ls0,Ls1,Ls2,Ls3のうち、緩登坂路の変速線Ls1を選択する。
【0105】
次に、ステップST122において、現在の車速V(出力回転数センサ105の出力信号(Nout)から算出)と、上記した緩登坂路用のL/U−off車速Vs1とを比較し、現在の車速VがL/U−off車速Vs1を下回った時点([現在車速V<Vs1]となりステップST122の判定結果が肯定判定(YES)となった時点)でロックアップクラッチ24を解放する(ステップST123)。このロックアップクラッチ24の解放後で車両停止時までの間に、ベルト式無段変速機4の変速比が大きい側(Lo側)に変速されて、実際の変速比γが最終目標変速比γt1となる。ただし、走行路が緩登坂路の場合、平坦路の場合と同様に、実変速比が最大変速比γmaxまで戻らないが、上述したように緩登坂路での最終目標変速比γt1は、平坦路での最終目標変速比γt0よりも大きい側(Lo側)の値となる。なお、この緩登坂路での車両減速時において、車速Vが上記緩登坂路用のL/U−off車速Vs1に到達するまで実際の変速比γは最小変速比γminに維持される。
【0106】
そして、出力回転数センサ105の出力信号から算出される車速Vに基づいて車両が停止したか否かを判定し(ステップST124)、このステップST124の判定結果が肯定判定(YES)となったときに処理を終了する。
【0107】
一方、上記ステップST103の判定結果が否定判定(NO)である場合(走行路が平坦路及び緩登坂路でない場合)は、図10に示すステップST104において走行路が「中登坂路」であるか否かを判定し、その判定結果が否定判定(NO)である場合はステップST141に移行する。ステップST104の判定結果が肯定判定(YES)である場合(走行路が中登坂路である場合)はステップST131に進む。
【0108】
ステップST131では、図8の変速線マップに設定された変速線Ls0,Ls1,Ls2,Ls3のうち、中登坂路の変速線Ls2を選択する。次に、ステップST132において、現在の車速V(出力回転数センサ105の出力信号(Nout)から算出)と、上記した中登坂路用のL/U−off車速Vs2とを比較し、現在の車速VがL/U−off車速Vs2を下回った時点([現在車速V<Vs2]となりステップST132の判定結果が肯定判定(YES)となった時点)でロックアップクラッチ24を解放する(ステップST133)。このロックアップクラッチ24の解放後で車両停止時までの間に、ベルト式無段変速機4の変速比が大きい側(Lo側)に変速されて、実際の変速比γが最大変速比γmax(目標変速比γt2)となる(γmaxに戻る)。なお、この中登坂路での車両減速時において、車速Vが上記中緩登坂路用のL/U−off車速Vs2に到達するまで(ロックアップクラッチ24が係合中)は、実際の変速比γは最小変速比γminに維持される。
【0109】
そして、出力回転数センサ105の出力信号から算出される車速Vに基づいて車両が停止したか否かを判定し(ステップST134)、このステップST134の判定結果が肯定判定(YES)となったときに処理を終了する。
【0110】
また、上記ステップST104の判定結果が否定判定(NO)である場合、走行路が急登坂路であると判断してステップST141に進む。ステップST141では、図8の変速線マップに設定された変速線Ls0,Ls1,Ls2,Ls3のうち、急登坂路の変速線Ls3を選択する。
【0111】
次に、ステップST142において、現在の車速V(出力回転数センサ105の出力信号(Nout)から算出)と、上記した急登坂路用のL/U−off車速Vs3とを比較し、現在の車速VがL/U−off車速Vs3を下回った時点([現在車速V<Vs3]となりステップST142の判定結果が肯定判定(YES)となった時点)でロックアップクラッチ24を解放する(ステップST143)。このロックアップクラッチ24の解放後で車両停止時までの間に、ベルト式無段変速機4の変速比が大きい側(Lo側)に変速されて、実際の変速比γが最大変速比γmax(目標変速比γt3)となる(γmaxに戻る)。ただし、急登坂路の変速線Ls3の最終目標入力回転数Nintは、中登坂路の変速線Ls2の最終目標入力回転数Nintよりも大きい側に設定さているので最大変速比γmaxに早く戻る。なお、この急登坂路での車両減速時において、車速Vが上記急登坂路用のL/U−off車速Vs3に到達するまで(ロックアップクラッチ24が係合中)は、実際の変速比γは最小変速比γminに維持される。
【0112】
そして、ステップST144において、出力回転数センサ105の出力信号から算出される車速Vに基づいて車両が停止したか否かを判定し、このステップST144の判定結果が肯定判定(YES)となったときに処理を終了する。
【0113】
なお、以上の図9及び図10の制御ルーチンの実行中に、アクセルペダルが操作(アクセルON)された場合には処理を終了する。
【0114】
以上のように、この例によれば、路面勾配が大きいほど目標変速比を大きい側(Lo側)に設定しているので、路面勾配が小さい場合は大きい場合と比較して車両停止時の目標変速比を小さくすることができる。これによって、車両減速時おいてベルト式無段変速機4の変速比を小さい側(Hi側)に維持できる範囲を広げることができる。すなわち、従来制御では、路面勾配の大きさに関係なく車両停止時の目標変速比を最大変速比γmaxに設定しているので、平坦路や緩やかな登坂路においても急登坂路と同様なタイミングで変速比をHi側からLo側に変速している。これに対し、上述の如く、路面勾配が小さいほど最終目標変速比γt(目標入力回転数Mint)を小さい側(Hi側)に設定することにより、平坦路や緩やかな登坂路のように路面勾配が小さい場合には変速タイミングを遅らすことができ、車両減速時において変速比をHi側に維持できる範囲を広げることができる。このように変速比をHi側に維持できる範囲が広がることにより燃費の改善を図ることができる。また、この例では、急登坂路などの路面勾配が大きい場合には、車両停止時の目標変速比を最大変速比γmaxとしているので登坂路での発進時の駆動力を十分に確保することができる。このように、この例によれば、登坂路での発進時の駆動力を確保しながら、燃費の改善を図ることができる。
【0115】
また、この例では、車両停止時の走行路が平坦路や緩やかな登坂路(緩登坂路)である場合は、ベルト式無段変速機4の変速比が最大変速比γmaxまで戻らないようにしているので、機械式(エンジン駆動)のオイルポンプ10の仕事量を減少させることができ、燃費の向上を図ることができる。また、平坦路での車両停止時にベルト式無段変速機4の変速比が最大変速比γmaxまで戻らないようにすることで、平坦路での車両停止時の引き込み感を抑制することができる。すなわち、平坦路において最大変速比γmaxまで変速しようとすると、減速していくしたがって減速度がきつくなるので大きな引き込み感が発生するが、最大変速比γmaxまで変速せずに変速量を少なくすることによって、そのような引き込み感を低減することができる。なお、中登坂路や急登坂路では、走行抵抗(減速度)が大きいので、最大変速比γmaxまで変速することによる引き込み感は感じにくくなる。
【0116】
さらに、路面勾配が小さいほどロックアップクラッチ24を開放する車速を低く設定(路面勾配が大きいほどロックアップクラッチ24を解放する車速を高く設定)しているので、平坦路や緩やかな登坂路などの路面勾配が小さい場合(勾配=0も含む)に、フューエルカット領域を拡大することが可能となり、これによって燃費をより効果的に向上させることができる。
【0117】
さらにまた、この例では、急登坂路の場合は走行抵抗が大きくてロックアップクラッチ24を解放(L/U−OFF)してから車両停止までの時間が中登坂路の場合よりも短くなるという点を考慮し、車両停止時の走行路が急登坂路である場合は中登坂路である場合と比較して、最終目標入力回転数Nintを大きくして最大変速比γmaxに早く変速されるようにしているので、急登坂路においてもベルト式無段変速機4の変速比を最大変速比γmaxに確実に戻すことができる。
【0118】
以上の例では、登坂路での変速線として、緩登坂路用の変速線Ls1、中登坂路用のLs2及び急登坂路用の変速線Ls3の3本の変速線を設定した例について説明したが、これに限られることなく、登坂路用の変速線は2本であってもよい。また、登坂路の領域を更に細かく区分して4本以上の登坂路用の変速線を設定するようにしてもよい。
【0119】
なお、降坂路での車両停止時の制御については、特に限定されないが、例えば、上記した平坦路の場合と同様な制御を行うようにしてもよいし、また、降坂路の路面勾配が小さいほど、車両停止時の目標変速比を小さい側に設定するという制御を行うようにしてもよい。
【0120】
−駆動力補正制御−
次に、上述の車両停止時の制御の補助制御としての駆動力補正制御について説明する。
【0121】
まず、上述した車両停止時の制御においては、何らかの要因(例えば、油圧不足など)によって、車両停止時のベルト式無段変速機4の実際の変速比γr(実変速比γt)が、最終目標変速比γt(例えば最大変速比γmax)にまで変速されない場合があり、こうした状況になると、次回の車両発進時の駆動力が低下することが懸念される。
【0122】
このような点を考慮して、この例では、ベルト式無段変速機4の実際の変速比γrが最終目標変速比γtにまで戻されていない場合には、図11に示す駆動力補正制御を実施する。図11の制御ルーチンはECU8において実行される。
【0123】
この図11の制御ルーチンが開始されると、ステップST201において、車両停止時のベルト式無段変速機4の実際の変速比γrを判定する。具体的には、例えば、車両停止直前の入力回転数Ninと出力回転数Noutから実際の変速比γr(γr=Nin/Nout)を算出する。また、他の判定方法として、プライマリプーリ41のV溝幅及び/またはセカンダリプーリ42のV溝幅をセンサ(図示せず)等によって検出し、その検出値に基づいて実際の変速比γrを判定するという方法も挙げることができる。
【0124】
ステップST202では、最終目標変速比γt(平坦路の最終目標変速比γt0、緩登坂路の最終目標変速比γt1、または、最大変速比γmax)と、上記ステップST201で判定した実際の変速比γrとの差Δγ(変速戻り不足分)を算出する(Δγ=γt−γr)。なお、このステップST202で算出したΔγが「0」または「所定の許容範囲内の値」である場合は処理を終了する。
【0125】
ステップST203では、上記ステップST202で算出したΔγ(変速戻り不足分)を用いて、図12のマップを参照してスロットル開度補正量ΔTapを算出する。この図12のマップは、上記Δγ(変速戻り不足分)をパラメータとして、その変速戻り不足分による駆動力低下を解消できるようなスロットル開度(補正量)を実験・シミュレーション等によって経験的に取得した値をマップ化したものであって、ECU8のROM82内に記憶されている。
【0126】
そして、ステップST204において、車両発進時の最終目標スロットル開度Tapttを算出する。具体的には、車両発進時のアクセルペダルの操作量(駆動要求量:アクセル開度Pap)から目標スロットル開度Taptを求め、その目標スロットル開度Taptに、上記ステップST203で算出したスロットル開度補正量ΔTapを加算することにより最終目標スロットル開度Taptt(Taptt=Tapt+ΔTap)を算出する。このようにして算出した最終目標スロットル開度Tapttに基づいて、次回の車両発進時のエンジン制御(スロットルバルブ12のスロットルモータ13の駆動制御)を実行する。
【0127】
このように、車両停止時にベルト式無段変速機4の実際の変速比γrが最終目標変速比(γt0、γt1、または、γmax)まで戻らない場合は、その変速戻り不足分Δγに相当するスロットル開度(補正量ΔTap)を上乗せすることにより、車両発進時の駆動力を十分に確保することが可能になるので、ドライバのフィーリング(ドライバビリティ)が損なわれることがなくなる。
【0128】
なお、以上の例では、変速戻り不足分Δγからスロットル開度補正量ΔTapを算出しているが、変速戻り不足分Δγからアクセル開度補正量ΔPapを算出し、車両発進時のアクセルペダルの操作量(アクセル開度Pap)に上記アクセル開度補正量ΔPapを加算して最終目標アクセル開度Papttを求め、その最終目標アクセル開度Papttから最終目標スロットル開度Tapttを算出するようにしてもよい。
【0129】
−EOPアシスト制御−
次に、上述の車両停止時の制御の補助制御としてのEOPアシスト制御(電動オイルポンプによるアシスト制御)について説明する。
【0130】
まず、上述した車両停止時の制御においては、ベルト式無段変速機4の変速制御用の油圧が不足(機械式オイルポンプ10の仕事量が不足)する場合、最終目標変速比γtまで変速できない場合がある。特に、上述した中登坂路や急登坂路での車両停止時には、変速比を最大変速比γmaxにまで戻す必要があるため、機械式のオイルポンプ10の油圧だけでは変速に必要な油圧が不足することが懸念される。
【0131】
このような点を考慮し、この例では、上記した油圧の不足が発生する場合には、その油圧不足分を補うことにより、車両停止時に変速比を最終目標変速比γtまで確実に戻るようにする。具体的には、この例では、アイドルストップ車両等のエコラン車両などを対象としており、こうした車両に搭載されている電動オイルポンプ(EOP)を利用して、油圧が不足する場合には、電動オイルポンプでアシストすることにより油圧不足を解消するという制御を行う。
【0132】
その制御(EOPアシスト制御)の一例について図13のフローチャートを参照して説明する。図13の制御ルーチンはECU8において実行される。
【0133】
この図13の制御ルーチンが開始されると、ステップST301において、最終目標変速比(γt0、γt1、または、γmax)に変速するのに必要な油圧Optを、現在車速Vなどに基づいてマップや演算式に基づいて算出する。さらに、ステップST302において、油圧センサ112の出力信号に基づいて実油圧(ライン圧)PLを認識する。この実油圧PLの認識処理及び上記必要油圧Optの算出処理は、例えば、上記した図8のステップST101で走行路を判定したとき(平坦路、緩登坂路、中登坂路、または、急登坂路を判定したとき)に実行するようにすればよい。なお、必要油圧Optの算出用のマップとしては、例えば、最終目標変速比(γt0,γt1,γmax)及び車速などをパラメータとして、その最終目標変速比への変速に必要な油圧を実験・シミュレーション等によって取得・適合した値をマップ化したものを用いる。
【0134】
次に、ステップST303において、上記ステップST301で算出した必要油圧Optと、上記ステップST302で認識した実油圧PLとを比較し、その必要油圧Optが実油圧PLよりも大きい場合([Opt>PL]でステップST303の判定結果が肯定判定(YES)である場合)は、電動オイルポンプを作動(EOPアシスト実行)して油圧を増大させる。このEPOアシストの開始タイミングは、例えば、上記したL/U−off車速(Vs0,Vs1,Vs2,Vs3:図8参照)よりも高車速側のタイミングとしてもよいし、あるいは、車両減速時に変速比をHi側からLo側に変速する過程でEOPアシストを開始するようにしてもよい。
【0135】
そして、このように、EOPアシストを実行して油圧を増大させることにより、車両停止時の最終目標変速比が最大変速比γmaxである場合であっても、変速比を確実に戻すことが可能になる。なお、上記ステップST303の判定結果が否定判定(NO)である場合つまり上記実油圧PLが必要油圧Opt以上(Opt≦PL)である場合はEOPアシストを実行せずに処理を終了する。
【0136】
ここで、電動オイルポンプで油圧アシストを行う場合の他の制御例として、油圧の不足が発生しない状況であっても、EOPアシストを実行するという制御を挙げることができる。このようなEOPアシスト制御を行えば、ベルト式無段変速機4の変速制御用の油圧がアップし、その油圧アップに相当する分だけHi側からLo側への変速速度が速くなるので、L/U−off車速(Vs0〜Vs3)を低車速側に設定することできる。このように、EOPアシストを実行してL/U−off車速を低車速側に設定することにより、燃費の向上を図ることができる。この場合、EPOアシストの開始タイミングは、例えば上記したL/U−off車速(Vs0,Vs1,Vs2,Vs3:図8参照)よりも高車速側のタイミングとすればよい。
【0137】
−他の実施形態−
以上の例では、ガソリンエンジンを搭載した車両の制御装置に本発明を適用した例を示したが、本発明はこれに限られることなく、ディーゼルエンジン等の他のエンジンを搭載した車両の制御装置にも適用可能である。また、車両の動力源については、エンジン(内燃機関)のほか、エンジンと電動モータの両方を備えているハイブリッド形動力源であってもよい。
【0138】
また、車両に搭載される無段変速機としては、上記したベルト式無段変速機に限られることなく、トロイダル式無段変速機などの他の形式の無段変速機であってもよい。
【0139】
また、本発明の制御装置は、FF(フロントエンジン・フロントドライブ)型車両に限れられることなく、FR(フロントエンジン・リアドライブ)型車両、4輪駆動車にも適用できる。
【産業上の利用可能性】
【0140】
本発明は、エンジン(内燃機関)及び自動変速機が搭載された車両の制御装置に利用可能であり、さらに詳しくは、エンジンと自動変速機との間に、ロックアップクラッチ付きの流体伝動装置(トルクコンバータ)が設けられた車両の制御装置に利用することができる。
【符号の説明】
【0141】
1 エンジン
4 ベルト式無段変速機
10 機械式のオイルポンプ
41 プライマリプーリ
413 油圧アクチュエータ
42 セカンダリプーリ
423 油圧アクチュエータ
43 ベルト
101 エンジン回転数センサ
102 スロットル開度センサ
105 入力回転数センサ
106 出力回転数センサ
107 アクセル開度センサ
111 勾配センサ
112 油圧センサ
20 油圧制御回路
8 ECU
【特許請求の範囲】
【請求項1】
エンジン及び自動変速機と、前記エンジンと自動変速機との間に配設された流体伝動装置と、前記流体伝動装置の入力側と出力側とを直結するロックアップクラッチとが搭載された車両に適用され、所定車速を下回った場合に前記ロックアップクラッチを解放し、車両停止時までの間に前記自動変速機の変速比を大きい側に変速する制御が実行可能な車両の制御装置において、
路面勾配が正方向に大きいほど車両停止時の目標変速比を大きい側に設定することを特徴とする車両の制御装置。
【請求項2】
請求項1記載の車両の制御装置において、
路面勾配が正方向に大きいほど前記ロックアップクラッチを解放する車速を高く設定することを特徴とする車両の制御装置。
【請求項3】
請求項1または2記載の車両の制御装置において、
車両停止時の前記自動変速機の実変速比が目標変速比よりも小さい場合は、その実変速比と目標変速比との差に応じて車両発進時の前記エンジンの駆動力を増大させることを特徴とする車両の制御装置。
【請求項4】
請求項1または2に記載の車両の制御装置において、
油圧式の自動変速機と電動オイルポンプとを備え、目標変速比への変速時に油圧が不足する場合には前記電動オイルポンプの作動により油圧を増大させること特徴とする車両の制御装置。
【請求項5】
請求項1または2に記載の車両の制御装置において、
油圧式の自動変速機と電動オイルポンプとを備え、車両減速時に前記電動オイルポンプを作動して前記ロックアップクラッチを解放する車速を低い側に設定することを特徴とする車両の制御装置。
【請求項1】
エンジン及び自動変速機と、前記エンジンと自動変速機との間に配設された流体伝動装置と、前記流体伝動装置の入力側と出力側とを直結するロックアップクラッチとが搭載された車両に適用され、所定車速を下回った場合に前記ロックアップクラッチを解放し、車両停止時までの間に前記自動変速機の変速比を大きい側に変速する制御が実行可能な車両の制御装置において、
路面勾配が正方向に大きいほど車両停止時の目標変速比を大きい側に設定することを特徴とする車両の制御装置。
【請求項2】
請求項1記載の車両の制御装置において、
路面勾配が正方向に大きいほど前記ロックアップクラッチを解放する車速を高く設定することを特徴とする車両の制御装置。
【請求項3】
請求項1または2記載の車両の制御装置において、
車両停止時の前記自動変速機の実変速比が目標変速比よりも小さい場合は、その実変速比と目標変速比との差に応じて車両発進時の前記エンジンの駆動力を増大させることを特徴とする車両の制御装置。
【請求項4】
請求項1または2に記載の車両の制御装置において、
油圧式の自動変速機と電動オイルポンプとを備え、目標変速比への変速時に油圧が不足する場合には前記電動オイルポンプの作動により油圧を増大させること特徴とする車両の制御装置。
【請求項5】
請求項1または2に記載の車両の制御装置において、
油圧式の自動変速機と電動オイルポンプとを備え、車両減速時に前記電動オイルポンプを作動して前記ロックアップクラッチを解放する車速を低い側に設定することを特徴とする車両の制御装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−62921(P2012−62921A)
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願番号】特願2010−205740(P2010−205740)
【出願日】平成22年9月14日(2010.9.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願日】平成22年9月14日(2010.9.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]